CN113035759A - 一种肖特基整流管自动上料结构 - Google Patents
一种肖特基整流管自动上料结构 Download PDFInfo
- Publication number
- CN113035759A CN113035759A CN202110219803.6A CN202110219803A CN113035759A CN 113035759 A CN113035759 A CN 113035759A CN 202110219803 A CN202110219803 A CN 202110219803A CN 113035759 A CN113035759 A CN 113035759A
- Authority
- CN
- China
- Prior art keywords
- material shifting
- feeding
- negative pressure
- motor
- feeding section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000463 material Substances 0.000 claims abstract description 130
- 238000006073 displacement reaction Methods 0.000 claims abstract description 23
- 230000007306 turnover Effects 0.000 claims abstract description 14
- 238000001514 detection method Methods 0.000 claims abstract description 12
- 238000007599 discharging Methods 0.000 claims abstract description 4
- 210000004209 hair Anatomy 0.000 claims description 13
- 238000004140 cleaning Methods 0.000 claims description 7
- 238000003756 stirring Methods 0.000 claims description 7
- 238000009434 installation Methods 0.000 claims description 6
- 239000011248 coating agent Substances 0.000 claims description 4
- 238000000576 coating method Methods 0.000 claims description 4
- 238000000034 method Methods 0.000 abstract description 10
- 230000008569 process Effects 0.000 abstract description 10
- 230000009286 beneficial effect Effects 0.000 abstract description 2
- 230000009471 action Effects 0.000 description 8
- 240000007643 Phytolacca americana Species 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005036 potential barrier Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
Images


Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67706—Mechanical details, e.g. roller, belt
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67736—Loading to or unloading from a conveyor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L29/00—Semiconductor devices adapted for rectifying, amplifying, oscillating or switching, or capacitors or resistors with at least one potential-jump barrier or surface barrier, e.g. PN junction depletion layer or carrier concentration layer; Details of semiconductor bodies or of electrodes thereof ; Multistep manufacturing processes therefor
- H01L29/66—Types of semiconductor device ; Multistep manufacturing processes therefor
- H01L29/86—Types of semiconductor device ; Multistep manufacturing processes therefor controllable only by variation of the electric current supplied, or only the electric potential applied, to one or more of the electrodes carrying the current to be rectified, amplified, oscillated or switched
- H01L29/861—Diodes
- H01L29/872—Schottky diodes
Abstract
本发明提供一种肖特基整流管自动上料结构,包括支架,所述支架上分别设置有振筛、上送料轨道、下送料轨道、翻转结构、第一拨料结构、第二拨料结构、第三拨料结构、检测装置;所述上送料轨道的进料端与所述振筛的出料端连接,所述上送料轨道包括水平送料段和倾斜送料段,所述第一拨料结构、第二拨料结构均包括第一旋转电机、第一转轮、若干拨料叉,所述第三拨料结构包括直线滑台、滑块、拨料板条、上下位移电机、伸缩轴;所述翻转结构包括第二旋转电机、翻转臂、负压气腔。本发明的有益效果是:在送料的过程中,对输送过程中放反的肖特基实现自动翻转并且也能自动上料,提升工作效率。
Description
技术领域
本发明涉及肖特基整流管加工技术领域,尤其涉及一种肖特基整流管自动上料结构。
背景技术
肖特基整流管是具有肖特基特性的“金属半导体结”的整流二极管,以其开关速度快、整流电流大、压降低和低功耗等特性获得广泛应用,特别适用于高频整流电路和大电流整流电路。肖特基整流管的结构原理与PN结整流管有很大的区别,通常将PN结整流管称作结整流管,而把金属-半导体整流管叫作肖特基整流管。肖特基整流管仅用一种载流子(电子)输送电荷,在势垒外侧无过剩少数载流子的积累,因此,不存在电荷储存问题,使开关特性获得时显改善。其反向恢复时间已能缩短到10ns以内。但它的反向耐压值较低,一般不超过去时100V。因此适宜在低压、大电流情况下工作。利用其低压降这特点,能提高低压、大电流整流(或续流)电路的效率。
日常生产中,对于肖特基整流管的加工,需要将肖特基堆积在振筛,肖特基通过振筛进入到输送轨道再输送到加工工位进行加工,这个过程中,首先通过振筛对肖特基放置的正反面进行预调,下一步调整会在加工工位中,若发现放反了,就在加工工位出对肖特基进行翻转;还有一种情况是在输送轨道中设置检测装置,发现位置放反了,就直接取走,再次人工放回到振筛中,这样的操作方式工作效率低,亟待改善。
发明内容
基于此,本发明的目的在于提供一种肖特基整流管自动上料结构,在送料的过程中,对输送过程中放反的肖特基实现自动翻转并且也能自动上料,提升工作效率。
本发明提供一种肖特基整流管自动上料结构,包括支架,所述支架上分别设置有振筛、上送料轨道、下送料轨道、翻转结构、第一拨料结构、第二拨料结构、第三拨料结构、检测装置。
所述上送料轨道的进料端与所述振筛的出料端连接,所述上送料轨道包括水平送料段和倾斜送料段,所述倾斜送料段与所述水平送料段远离所述振筛的一端连接;所述倾斜送料段的出料口位于所述下送料轨道的出料口的正上方;所述水平送料段和所述下送料轨道平行设置。
所述第一拨料结构、第二拨料结构均包括第一旋转电机、第一转轮、若干拨料叉,所述第一旋转电机安装在所述支架上,所述第一转轮与所述第一旋转电机的动力输出端连接,各所述拨料叉周向阵列设置在所述第一转轮的外侧面;所述水平送料段和所述下送料轨道均设置有供所述拨料叉插入进行拨料的条形孔。所述第一拨料结构安装在所述上送料轨道的下方并且与所述振筛的出料口对应。
所述第三拨料结构包括直线滑台、滑块、拨料板条、上下位移电机、伸缩轴,所述上下位移电机安装在所述支架上,所述伸缩轴的一端与所述上下位移电机的动力输出端连接,所述伸缩轴的另一端与所述直线滑台的底部连接,所述滑块滑动连接在所述直线滑台上,所述拨料板条设置在所述滑块上。
所述翻转结构包括第二旋转电机、翻转臂、负压气腔,所述第二旋转电机安装在所述支架上,所述翻转臂的一端与所述第二旋转电机的动力输出端连接,所述负压气腔安装在所述翻转臂的自由端,所述负压气腔通过管道与负压提供源连接,所述负压气腔远离所述翻转臂的一侧面开设有负压气孔;所述水平送料段上设置有翻料工位,所述翻料工位的一侧开设有与所述翻转臂对应的缺口部。
所述下送料轨道与所述翻转结构对应的位置设置有接料工位,当所述翻转臂带动所述负压气腔从水平送料段旋转180°后,所述负压气腔正好位于所述接料工位的正上方;所述第二拨料结构和所述第三拨料结构分别设置在所述下送料轨道的下方并且位于所述接料工位的前后两侧。所述检测装置安装在所述水平送料段上并且与所述缺口部靠向所述振筛一侧的位置相邻近。
作为优选方案,所述接料工位上安装有第一光电传感器。
作为优选方案,所述下送料轨道靠近出料口的一端安装有第二光电传感器。
作为优选方案,所述翻料工位上位于所述缺口部的相对两侧横跨设置有刷毛安装框,所述刷毛安装框的下部对应设置有若干清洁刷毛。
作为优选方案,所述缺口部上对应设置有挡板结构;所述挡板结构包括第三旋转电机、旋转轴、挡板,所述第三旋转电机安装在所述上送料轨道的一侧面,所述旋转轴的一端与所述第三旋转电机的动力输出端连接,所述旋转轴的自由端连接有挡板,所述挡板长度与所述缺口部的宽度相对应。
作为优选方案,所述水平送料段与所述倾斜送料段的连接处下方设置有限料结构;所述限料结构包括升降电机、升降轴,所述升降电机安装在所述支架上,所述升降轴的一端与所述升降电机的动力输出端连接,所述升降轴与所述条形孔对应设置。
作为优选方案,所述拨料叉的外表面涂覆设置有防静电涂层。
本发明的有益效果为:
1、肖特基整流管从振筛输送到上送料轨道,在输送的过程中被检测到方向放反的肖特基整流管在翻料工位被翻转结构翻转到下送料轨道,在此过程中,上送料轨道保持向前的输料状态,无需额外设置工位对方向放反的肖特基整流管进行人工的位置转移,位于下送料轨道的肖特基整流管通过第三拨料结构再定期输送到加工工位,从而提升工作效率;
2、翻料工位上位于缺口部的相对两侧横跨设置有刷毛安装框,刷毛安装框的下部对应设置有若干清洁刷毛,当负压气腔吸附着肖特基整流管进行翻转时,穿过刷毛安装框时与清洁刷毛接触,从而实现对肖特基整流管的表面进行;
3、缺口部上对应设置有挡板结构,当不需要进行翻转动作时,挡板将缺口部挡上,确保肖特基整流管在输送的过程中保持水平向前位移;
4、水平送料段与倾斜送料段的连接处下方设置有限料结构,在停止输送时,通过限料结构阻挡肖特基整流管继续向前。
附图说明
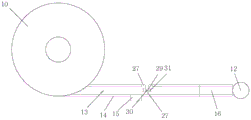
图1为本发明的俯视图。
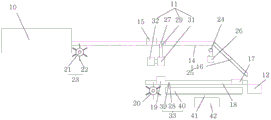
图2为本发明的侧面视图。
图3为本发明的侧面视图(显示翻转臂带动负压气腔从水平送料段旋转180°后)。
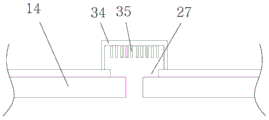
图4为刷毛安装框的结构示意图。
图5为挡板结构的示意图。
附图标记为:振筛10、翻转结构11、加工工位12、条形孔13、水平送料段14、倾斜送料段16、检测装置15、第二光电传感器17、下送料轨道18、第一光电传感器19、第一拨料结构23、第二拨料结构20、第一转轮21、若干拨料叉22、升降电机26、升降轴24、上送料轨道25、缺口部27、第二旋转电机32、翻转臂31、负压气腔29、负压气孔30、第三拨料结构33、刷毛安装框34、清洁刷毛35、第三旋转电机37、旋转轴36、挡板38、直线滑台40、滑块28、拨料板条39、上下位移电机42、伸缩轴41。
具体实施方式
为能进一步了解本发明的特征、技术手段以及所达到的具体目的、功能,下面结合具体实施方式和附图对本发明作进一步详细描述。
本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
请参照图1-5所示,本发明提供一种肖特基整流管自动上料结构,包括支架,支架上分别设置有振筛10、上送料轨道25、下送料轨道18、翻转结构11、第一拨料结构23、第二拨料结构20、第三拨料结构33、检测装置15。振筛10、第一拨料结构23、第二拨料结构20、第三拨料结构33、检测装置15均与控制系统连接。
上送料轨道25的进料端与振筛10的出料端连接,上送料轨道25包括水平送料段14和倾斜送料段16,倾斜送料段16与水平送料段14远离振筛10的一端连接;倾斜送料段16的出料口位于下送料轨道18的出料口的正上方与加工工位12的位置对应;水平送料段14和下送料轨道18平行设置。
第一拨料结构23、第二拨料结构20均包括第一旋转电机、第一转轮21、若干拨料叉22,第一旋转电机安装在支架上,第一转轮21与第一旋转电机的动力输出端连接,各拨料叉22周向阵列设置在第一转轮21的外侧面;水平送料段14和下送料轨道18均设置有供拨料叉22插入进行拨料的条形孔13。第一拨料结构23安装在上送料轨道25的下方并且与振筛10的出料口对应。实际操作时,第一旋转电机动力输出驱动第一转轮21旋转从而使转动至条形孔13上方的拨料叉22拨动肖特基整流管发生位移。
第三拨料结构33包括直线滑台40、滑块28、拨料板条39、上下位移电机42、伸缩轴41,上下位移电机42安装在支架上,伸缩轴41的一端与上下位移电机42的动力输出端连接,伸缩轴41的另一端与直线滑台40的底部连接,滑块28滑动连接在直线滑台40上,拨料板条39设置在滑块28上。实际操作时,上下位移电机42通过伸缩轴41带动直线滑台40上移既定距离后拨料板条39伸入到下送料轨道18的条形孔13中,直线滑台40促使滑块28带动拨料板条39沿着下送料轨道18的长度方向进行移动从而实现拨料动作。
翻转结构11包括第二旋转电机32、翻转臂31、负压气腔29,第二旋转电机32安装在支架上,翻转臂31的一端与第二旋转电机32的动力输出端连接,负压气腔29安装在翻转臂31的自由端,负压气腔29通过管道与负压提供源连接,负压气腔29远离翻转臂31的一侧面开设有负压气孔30;水平送料段14上设置有翻料工位,翻料工位的一侧开设有与所述翻转臂31对应的缺口部27。实际操作时,负压气腔29将肖特基整流管吸附住,第二旋转电机32促使翻转臂31带动负压气腔29在180°的范围内进行翻转,从而实现对肖特基整流管的翻转动作,当第二旋转电机32促使翻转臂31带动负压气腔29翻转至接料工位的上方后,负压气腔29将肖特基整流管放下,肖特基整流管落入接料工位即完成翻转。
下送料轨道18与翻转结构11对应的位置设置有接料工位,当翻转臂31带动负压气腔29从水平送料段14旋转180°后,负压气腔29正好位于接料工位的正上方;第二拨料结构20和第三拨料结构33分别设置在下送料轨道18的下方并且位于接料工位的前后两侧。接料工位上安装有第一光电传感器19。下送料轨道18靠近出料口的一端安装有第二光电传感器17。第一光电传感器19、第二光电传感器17均与控制系统连接。当第一光电传感器19感应到接料工位有肖特基整流管时,控制系统发出指令给第二拨料结构20进行拨料动作;当第二光电传感器17感应到有肖特基整流管时,控制系统发出指令给第三拨料结构33进行拨料动作,将肖特基整流管拨动到加工工位12的位置。
检测装置15安装在水平送料段14上并且与缺口部27靠向振筛10一侧的位置相邻近。当检测装置15检测到水平送料段14上的肖特基整流管位置放反了,检测装置15将信号反馈到控制系统,控制系统发出指令给翻转结构11执行翻转动作。
翻料工位上位于缺口部27的相对两侧横跨设置有刷毛安装框34,刷毛安装框34的下部对应设置有若干清洁刷毛35。当负压气腔吸附着肖特基整流管进行翻转时,穿过刷毛安装框时与清洁刷毛接触,从而实现对肖特基整流管的表面进行。
缺口部27上对应设置有挡板结构;挡板结构包括第三旋转电机37、旋转轴36、挡板38,第三旋转电机37安装在上送料轨道25的一侧面,旋转轴36的一端与第三旋转电机37的动力输出端连接,旋转轴36的自由端连接有挡板38,挡板38长度与缺口部27的宽度相对应。第三旋转电机37与控制系统连接。当不需要进行翻转动作时,挡板将缺口部挡上,确保肖特基整流管在输送的过程中保持水平向前位移。
水平送料段14与倾斜送料段16的连接处下方设置有限料结构;限料结构包括升降电机26、升降轴24,升降电机26安装在支架上,升降轴24的一端与升降电机26的动力输出端连接,升降轴24与所述条形孔13对应设置。升降电机26与控制系统连接。在停止输送时,通过限料结构阻挡肖特基整流管继续向前。
拨料叉22的外表面涂覆设置有防静电涂层,避免拨料叉22拨料的时候产生静电,影响产品的质量。
本实施方式的操作原理是:
1、肖特基整流管从振筛输送到上送料轨道,第一拨料结构23保持对上送料轨道25进行拨料动作,使肖特基整流管一直向加工工位方向移动;
2、在输送的过程中,检测装置15检测到方向放反的肖特基整流管后,检测装置15将信号反馈到控制系统,待该放反了的肖特基整流管移动至翻料工位,控制系统发出指令给第一拨料结构23停止拨料动作,再发出指令给限料结构,通过限料结构阻挡上送料轨道25上的肖特基整流管继续向前,再发出指令到挡板结构使挡板38翻起90°,再发出指令给翻转结构11执行翻转动作;
3、放反了的肖特基整流管被翻转180°落入到下送料轨道的接料工位上,翻转结构11复位至起始位置,随后,控制系统发出指令给限料结构复位至起始位置,再发出指令给第一拨料结构23继续拨料动作,位于上送料轨道的肖特基整流管继续输送到加工工位上;与此同时,第一光电传感器19感应到接料工位有肖特基整流管后,控制系统发出指令给第二拨料结构20进行拨料动作,将该肖特基整流管拨动至下一位置;
4、直至在下送料轨道上的肖特基整流管依次位移到第二光电传感器17的位置,第二光电传感器17感应到有肖特基整流管时将信号反馈到控制系统,控制系统发出指令给第一拨料结构23停止拨料动作,再发出指令给限料结构阻挡上送料轨道25上的肖特基整流管继续向前,随后控制系统发出指令给第三拨料结构33进行拨料动作,将肖特基整流管拨动到加工工位12的位置;
5、当第三拨料结构33将停留在下送料轨道上的肖特基整流管全部依次送入到加工工位后复位至起始位置,第二光电传感器17没有感应到下送料轨道上有肖特基整流管后将信号反馈到控制系统,控制系统发出指令给限料结构复位至起始位置,再发出指令给第一拨料结构23继续拨料动作。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
Claims (7)
1.一种肖特基整流管自动上料结构,包括支架,其特征在于:所述支架上分别设置有振筛(10)、上送料轨道(25)、下送料轨道(18)、翻转结构(11)、第一拨料结构(23)、第二拨料结构(20)、第三拨料结构(33)、检测装置(15);
所述上送料轨道(25)的进料端与所述振筛(10)的出料端连接,所述上送料轨道(25)包括水平送料段(14)和倾斜送料段(16),所述倾斜送料段(16)与所述水平送料段(14)远离所述振筛(10)的一端连接;所述倾斜送料段(16)的出料口位于所述下送料轨道(18)的出料口的正上方;所述水平送料段(14)和所述下送料轨道(18)平行设置;
所述第一拨料结构(23)、第二拨料结构(20)包括第一旋转电机、第一转轮(21)、若干拨料叉(22),所述第一旋转电机安装在所述支架上,所述第一转轮(21)与所述第一旋转电机的动力输出端连接,各所述拨料叉(22)周向阵列设置在所述第一转轮(21)的外侧面;所述水平送料段(14)和所述下送料轨道(18)均设置有供所述拨料叉(22)插入进行拨料的条形孔(13);所述第一拨料结构(23)安装在所述上送料轨道(25)的下方并且与所述振筛(10)的出料口对应;
所述第三拨料结构(33)包括直线滑台(40)、滑块(28)、拨料板条(39)、上下位移电机(42)、伸缩轴(41),所述上下位移电机(42)安装在所述支架上,所述伸缩轴(41)的一端与所述上下位移电机(42)的动力输出端连接,所述伸缩轴(41)的另一端与所述直线滑台(40)的底部连接,所述滑块(28)滑动连接在所述直线滑台(40)上,所述拨料板条(39)设置在所述滑块(28)上;
所述翻转结构(11)包括第二旋转电机(32)、翻转臂(31)、负压气腔(29),所述第二旋转电机(32)安装在所述支架上,所述翻转臂(31)的一端与所述第二旋转电机(32)的动力输出端连接,所述负压气腔(29)安装在所述翻转臂(31)的自由端,所述负压气腔(29)通过管道与负压提供源连接,所述负压气腔(29)远离所述翻转臂(31)的一侧面开设有负压气孔(30);所述水平送料段(14)上设置有翻料工位,所述翻料工位的一侧开设有与所述翻转臂(31)对应的缺口部(27);
所述下送料轨道(18)与所述翻转结构(11)对应的位置设置有接料工位,当所述翻转臂(31)带动所述负压气腔(29)从水平送料段(14)旋转180°后,所述负压气腔(29)正好位于所述接料工位的正上方;所述第二拨料结构(20)和所述第三拨料结构(33)分别设置在所述下送料轨道(18)的下方并且位于所述接料工位的前后两侧;
所述检测装置(15)安装在所述水平送料段(14)上并且与所述缺口部(27)靠向所述振筛(10)一侧的位置相邻近。
2.根据权利要求1所述的一种肖特基整流管自动上料结构,其特征在于:所述接料工位上安装有第一光电传感器(19)。
3.根据权利要求1所述的一种肖特基整流管自动上料结构,其特征在于:所述下送料轨道(18)靠近出料口的一端安装有第二光电传感器(17)。
4.根据权利要求1所述的一种肖特基整流管自动上料结构,其特征在于:所述翻料工位上位于所述缺口部(27)的相对两侧横跨设置有刷毛安装框(34),所述刷毛安装框(34)的下部对应设置有若干清洁刷毛(35)。
5.根据权利要求1所述的一种肖特基整流管自动上料结构,其特征在于:所述缺口部(27)上对应设置有挡板结构;所述挡板结构包括第三旋转电机(37)、旋转轴(36)、挡板(38),所述第三旋转电机(37)安装在所述上送料轨道(25)的一侧面,所述旋转轴(36)的一端与所述第三旋转电机(37)的动力输出端连接,所述旋转轴(36)的自由端连接有挡板(38),所述挡板(38)长度与所述缺口部(27)的宽度相对应。
6.根据权利要求1所述的一种肖特基整流管自动上料结构,其特征在于:所述水平送料段(14)与所述倾斜送料段(16)的连接处下方设置有限料结构;所述限料结构包括升降电机(26)、升降轴(24),所述升降电机(26)安装在所述支架上,所述升降轴(24)的一端与所述升降电机(26)的动力输出端连接,所述升降轴(24)与所述条形孔(13)对应设置。
7.根据权利要求1所述的一种肖特基整流管自动上料结构,其特征在于:所述拨料叉(22)的外表面涂覆设置有防静电涂层。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110219803.6A CN113035759B (zh) | 2021-02-26 | 2021-02-26 | 一种肖特基整流管自动上料结构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110219803.6A CN113035759B (zh) | 2021-02-26 | 2021-02-26 | 一种肖特基整流管自动上料结构 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113035759A true CN113035759A (zh) | 2021-06-25 |
| CN113035759B CN113035759B (zh) | 2021-09-28 |
Family
ID=76461971
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110219803.6A Active CN113035759B (zh) | 2021-02-26 | 2021-02-26 | 一种肖特基整流管自动上料结构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113035759B (zh) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101834243A (zh) * | 2010-03-29 | 2010-09-15 | 东莞市新泽谷机械有限公司 | 散装led供料器 |
| CN201882623U (zh) * | 2010-10-29 | 2011-06-29 | 苏州工业园区高登威科技有限公司 | 一种自动送料设备 |
| CN102724859A (zh) * | 2012-06-29 | 2012-10-10 | 东莞市新泽谷机械制造股份有限公司 | 散装立式电子元件供料器 |
| DE202016004428U1 (de) * | 2016-07-20 | 2017-10-23 | Barry-Wehmiller Papersystems, Inc. | Vorrichtung zum Aufbringen von Datenträgern auf eine Trägerbahn |
| CN111422589A (zh) * | 2020-04-07 | 2020-07-17 | 高星东 | 一种电容器反极检测定向上料设备 |
| CN211712074U (zh) * | 2019-11-22 | 2020-10-20 | 中之半导体科技(东莞)有限公司 | 一种二极管料带自动上料结构 |
-
2021
- 2021-02-26 CN CN202110219803.6A patent/CN113035759B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101834243A (zh) * | 2010-03-29 | 2010-09-15 | 东莞市新泽谷机械有限公司 | 散装led供料器 |
| CN201882623U (zh) * | 2010-10-29 | 2011-06-29 | 苏州工业园区高登威科技有限公司 | 一种自动送料设备 |
| CN102724859A (zh) * | 2012-06-29 | 2012-10-10 | 东莞市新泽谷机械制造股份有限公司 | 散装立式电子元件供料器 |
| DE202016004428U1 (de) * | 2016-07-20 | 2017-10-23 | Barry-Wehmiller Papersystems, Inc. | Vorrichtung zum Aufbringen von Datenträgern auf eine Trägerbahn |
| CN211712074U (zh) * | 2019-11-22 | 2020-10-20 | 中之半导体科技(东莞)有限公司 | 一种二极管料带自动上料结构 |
| CN111422589A (zh) * | 2020-04-07 | 2020-07-17 | 高星东 | 一种电容器反极检测定向上料设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113035759B (zh) | 2021-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN209049774U (zh) | 电池托盘清洗装置 | |
| CN113035759B (zh) | 一种肖特基整流管自动上料结构 | |
| CN102248249A (zh) | 一种太阳能电池片涂锡带焊接机用上料装置 | |
| CN106229140B (zh) | 一种cd电感绕线焊锡一体机 | |
| CN211165983U (zh) | 一种三极管用喷码装置 | |
| CN209000893U (zh) | 一种晶硅电池片翻转输送装置 | |
| CN218055943U (zh) | 一种光通信器件清洗用转动上料工装 | |
| CN207592286U (zh) | 一种自动排除电池隐裂片的上料设备及上料系统 | |
| CN216245516U (zh) | 电烧炉自动投料设备 | |
| CN109742190B (zh) | 一种太阳能电池片焊带机 | |
| CN211846024U (zh) | 一种倾斜式定向输料装置 | |
| CN212093642U (zh) | 一种自动磁碟洗涤机 | |
| CN213517424U (zh) | 一种二极管生产检测装置 | |
| CN113140473A (zh) | 一种塑封二极管生产用上胶装置及其实施方法 | |
| CN105944993B (zh) | 太阳能电池板清扫机器人 | |
| CN211217601U (zh) | 一种玻璃片角度分选机 | |
| CN213558568U (zh) | 一种自动输送式蔬菜挑选工作台 | |
| CN220805963U (zh) | 一种高洁净度焊丝防偏移导向装置 | |
| CN210102778U (zh) | 一种用于提升机的剔料机构 | |
| CN214878675U (zh) | 一种螺丝自动上料装置 | |
| CN220560617U (zh) | 一种自动上料的线切割机床 | |
| CN212287084U (zh) | 一种二极管座生产用快速打磨装置 | |
| CN217359823U (zh) | 一种水泥助磨剂生产用快速检测装置 | |
| CN219836850U (zh) | 一种太阳能电池片清洗烘干装置 | |
| CN209763747U (zh) | 一种用于硅片烧结炉的上料装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information | ||
| CB02 | Change of applicant information |
Address after: Room 103, building 1, No.76, Baiye Road, Liaobu Town, Dongguan City, Guangdong Province 523430 Applicant after: Xianzhike semiconductor technology (Dongguan) Co.,Ltd. Address before: Room 103, building 1, No.76, Baiye Road, Liaobu Town, Dongguan City, Guangdong Province 523430 Applicant before: Zhongzhi Semiconductor Technology (Dongguan) Co.,Ltd. |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant |