CN112996573A - 提供运动训练的康复设备及使用方法 - Google Patents
提供运动训练的康复设备及使用方法 Download PDFInfo
- Publication number
- CN112996573A CN112996573A CN201980073639.3A CN201980073639A CN112996573A CN 112996573 A CN112996573 A CN 112996573A CN 201980073639 A CN201980073639 A CN 201980073639A CN 112996573 A CN112996573 A CN 112996573A
- Authority
- CN
- China
- Prior art keywords
- link
- pedal
- handle
- subject
- gait
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0255—Both knee and hip of a patient, e.g. in supine or sitting position, the feet being moved in a plane substantially parallel to the body-symmetrical-plane
- A61H1/0262—Walking movement; Appliances for aiding disabled persons to walk
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0218—Drawing-out devices
- A61H1/0229—Drawing-out devices by reducing gravity forces normally applied to the body, e.g. by lifting or hanging the body or part of it
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/008—Using suspension devices for supporting the body in an upright walking or standing position, e.g. harnesses
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/005—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using electromagnetic or electric force-resisters
- A63B21/0058—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using electromagnetic or electric force-resisters using motors
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/15—Arrangements for force transmissions
- A63B21/157—Ratchet-wheel links; Overrunning clutches; One-way clutches
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/22—Resisting devices with rotary bodies
- A63B21/225—Resisting devices with rotary bodies with flywheels
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/0002—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements involving an exercising of arms
- A63B22/001—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements involving an exercising of arms by simultaneously exercising arms and legs, e.g. diagonally in anti-phase
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/0015—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with an adjustable movement path of the support elements
- A63B22/0017—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with an adjustable movement path of the support elements the adjustment being controlled by movement of the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/06—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement
- A63B22/0664—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement performing an elliptic movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H2001/0211—Walking coordination of arms and legs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
- A61H2201/0176—By stopping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0192—Specific means for adjusting dimensions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A61H2201/1215—Rotary drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1253—Driving means driven by a human being, e.g. hand driven
- A61H2201/1261—Driving means driven by a human being, e.g. hand driven combined with active exercising of the patient
- A61H2201/1269—Passive exercise driven by movement of healthy limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1445—Overrunning clutches; One-way clutches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1481—Special movement conversion means
- A61H2201/149—Special movement conversion means rotation-linear or vice versa
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1623—Back
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/1633—Seat
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
- A61H2201/1642—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
- A61H2201/1652—Harness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1664—Movement of interface, i.e. force application means linear
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1676—Pivoting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5023—Interfaces to the user
- A61H2201/5035—Several programs selectable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5023—Interfaces to the user
- A61H2201/5038—Interfaces to the user freely programmable by the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5023—Interfaces to the user
- A61H2201/5043—Displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5064—Position sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2203/00—Additional characteristics concerning the patient
- A61H2203/04—Position of the patient
- A61H2203/0406—Standing on the feet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2203/00—Additional characteristics concerning the patient
- A61H2203/04—Position of the patient
- A61H2203/0425—Sitting on the buttocks
- A61H2203/0431—Sitting on the buttocks in 90°/90°-position, like on a chair
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/06—Arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/12—Feet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2230/00—Measuring physical parameters of the user
- A61H2230/80—Weight
- A61H2230/805—Weight used as a control parameter for the apparatus
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/06—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement
- A63B22/0664—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement performing an elliptic movement
- A63B2022/0676—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement performing an elliptic movement with crank and handles being on the same side of the exercising apparatus with respect to the frontal body-plane of the user, e.g. crank and handles are in front of the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/06—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement
- A63B22/0664—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement performing an elliptic movement
- A63B2022/0676—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement performing an elliptic movement with crank and handles being on the same side of the exercising apparatus with respect to the frontal body-plane of the user, e.g. crank and handles are in front of the user
- A63B2022/0682—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with support elements performing a rotating cycling movement, i.e. a closed path movement performing an elliptic movement with crank and handles being on the same side of the exercising apparatus with respect to the frontal body-plane of the user, e.g. crank and handles are in front of the user with support elements being cantilevered, i.e. the elements being supported only on one side without bearing on tracks on the floor below the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/0054—Features for injury prevention on an apparatus, e.g. shock absorbers
- A63B2071/0081—Stopping the operation of the apparatus
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/00178—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices for active exercising, the apparatus being also usable for passive exercising
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/00181—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices comprising additional means assisting the user to overcome part of the resisting force, i.e. assisted-active exercising
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2208/00—Characteristics or parameters related to the user or player
- A63B2208/02—Characteristics or parameters related to the user or player posture
- A63B2208/0204—Standing on the feet
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2208/00—Characteristics or parameters related to the user or player
- A63B2208/02—Characteristics or parameters related to the user or player posture
- A63B2208/0228—Sitting on the buttocks
- A63B2208/0233—Sitting on the buttocks in 90/90 position, like on a chair
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/10—Positions
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/51—Force
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/801—Contact switches
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/808—Microphones
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/09—Adjustable dimensions
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/09—Adjustable dimensions
- A63B2225/093—Height
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/20—Miscellaneous features of sport apparatus, devices or equipment with means for remote communication, e.g. internet or the like
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
Abstract
在各种实施例中,本文提供了用于经由一个或更多个步态运动向受试者提供运动康复的系统、方法、过程和设备,这些步态运动基本上准确地模仿在健康的、自然的步态周期中执行的运动。系统可以经由踏板和手柄以及一个或更多个联动系统来模仿自然步态运动。在具体实施例中,系统可以进一步包括马达单元和/或离合器,以用于提供辅助或抵抗联动系统运动的受控力。此外,系统可以包括用于在站立位置或就座位置操作的塔柱。在至少一个实施例中,系统包括向受试者提供减负力的体重支撑系统。
Description
相关申请的交叉引用
本申请:
要求于2018年9月8日提交的题目为“REHABILITATION DEVICE PROVIDINGLOCOMOTIVE TRAINING AND METHOD OF USE”的美国专利申请第62/728,762号的权益和优先权;并且
参考美国专利第9,248,071号,上述中的每一个通过引用以其整体并入本文。
技术领域
本系统和方法总体上涉及为康复或其他用途提供运动训练(locomotiontraining)。
背景
运动康复的主要目的可以是恢复受试者的力量,并且使受试者在其自身力量的作用下保持以自然的步态周期行走。示例性的运动康复受试者可能(例如,在他们的腿部、足部、核心等方面)缺乏足够的力量来通过正常的步态周期移动其肢体。可替代地或者另外地,示例性受试者可能缺乏足够的协调性来在一整个步态周期中正确地定位和引导其肢体。例如,中风患者可能会出现肌肉无力和其腿部协调能力下降,并且因此可能无法在其自身力量的作用下行走。先前的提供运动康复的方法试图经由多台机器来解决力量和协调能力问题,这些机器可以通过运动康复计划使受试者反复地进步。例如,受试者可以使用轮椅,并且在康复计划的初始阶段可以使用专门为受限于轮椅的受试者设计的运动康复系统和机器。这种系统和机器只能在就座构型下操作,并且因此可能不适合训练站立的受试者。在同一示例中,受试者可能在其计划的某个阶段具备了站立能力,并且因此可能被引导为经由只为站立的受试者操作而设计的系统和机器来进行运动康复。
在上面的示例中,受试者需要至少两个系统或机器来体验运动康复。因为运动康复系统可能是昂贵的,所以先前的需要多个系统的解决方案对于患者和护理提供方来说可能是极其昂贵的。此外,运动康复系统可能会占用大的空间,因此,护理提供方可能无法提供完整和必要的康复系统系列,因为他们缺乏容纳每个系统的空间。因此,长期以来一直存在但仍未满足对于一种既能在站立位置又能在就座位置提供运动康复的单一运动康复系统的需要。
此外,示例性的运动康复受试者可能缺乏足够的力量来在站立位置支撑其全部重量;然而,他们可能具有足够的力量来在站立位置支撑其一部分重量。先前的运动康复方法未能提供这样装置和/或机构,该装置和/或机构允许受试者在支撑小于其总重量的一部分的站立位置下接受运动康复。因此,长期以来一直存在但仍未满足对如下运动康复系统的需求,即该运动康复系统允许受试者以站立位置执行运动康复锻炼,而同时仅支撑其总重量的一部分。
公开简要概述
以简要描述的方式并且根据一个实施例,本公开的方面总体上涉及用于提供治疗运动训练的设备和方法。
在各个实施例中,本文提供了用于向受试者提供运动康复的系统、方法、过程和设备。在一个或更多个实施例中,系统可以在站立位置或就座位置操作,并且系统可以包括使该系统在站立配置模式与就座配置模式之间转换的一个或更多个装置。在至少一个实施例中,系统可以允许受试者在站立构型与就座构型之间转换(且反之亦然),而不需要使患者离开机器。在一个或更多个实施例中,系统的接纳受试者的部分也能够旋转,使得受试者可以更容易地将其自身定位到其中的座椅系统上。
在至少一个实施例中,系统可以包括一个或更多个装置,该一个或更多个装置允许受试者在仅支撑其一部分自身重量的同时体验运动康复。在至少一个实施例中,系统包括体重支撑(BWS)系统,该体重支撑系统能够可控地和增量地减轻受试者体重的负载,从而潜在地降低受试者在训练期间所经受的压力和应力,并且在一些情况下,向原本可能不能进行站立锻炼的受试者提供站立运动训练。
在至少一个实施例中,系统可以包括联动系统,该联动系统允许受试者经由机械辅助的并且在某些情况下是电动辅助的步态周期来体验运动康复。在一个或更多个实施例中,联动系统可以提供人工步态周期(artificial gait cycle),该人工步态周期精确地执行自然步态周期中涉及的足部运动、腿部运动和臂部运动。在一个或更多个实施例中,联动系统可以包括接纳受试者的足部的踏板和受试者可以抓握的手柄。在各个实施例中,联动系统可以通过协调的、同时的踏板运动和手柄运动来引导踏板和手柄,协调的、同时的踏板运动和手柄运动重现了在自然步态周期中展示的足部运动和臂部运动。
在一个或更多个实施例中,系统可以包括离合器,该离合器允许该系统在运动康复期间提供抵抗受试者运动的可变阻力。在至少一个实施例中,系统可以包括马达单元,该马达单元可以与离合器可控地连接和断开。例如,离合器可以是可操作的,以可控地连接和断开其上的马达单元。在一个或更多个实施例中,马达单元在启动时可以产生旋转力,该旋转力向接受运动康复的受试者提供电动辅助。在至少一个实施例中,连接到马达单元的离合器可以允许精确控制和操纵提供给受试者的辅助量级(magnitude)。
在一个或更多个实施例中,本系统可以是可配置的,并且能够调节一个或更多个系统参数和装置,以适应各种受试者的尺寸和重量。在一个或更多个实施例中,系统可以包括增加或减小在运动训练期间经历的步幅长度的机构。在至少一个实施例中,系统可以包括用于调节座椅系统的高度、用于调节受试者与联动系统之间的距离、和/或用于调节受试者与手柄和/或踏板之间的距离的机构。
根据第一方面,一种步态训练设备,包括:A)手柄,其用于训练臂部运动;和B)踏板,其用于训练腿部运动,其中踏板的运动引起:1)内踏板连杆的运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统;2)该齿轮系统使第一连接连杆旋转,其中:i)第一连接连杆与第二连接连杆大体上平行;ii)第一连接连杆和第二连接连杆可操作地连接在手柄连杆的一部分的相对端附近;并且iii)第一连接连杆的旋转引起手柄连杆以弧线运动,从而引起手柄与手柄连杆一起以弧线运动,从而大体上模仿人类行走步态的手部运动。
根据第二方面,如第一方面或任何其他方面所述的步态训练设备,其中步态训练设备包括联动系统,该联动系统可操作地连接到手柄和踏板以用于使腿部运动和臂部运动同步,联动系统包括:A)第一连接连杆;B)手柄连杆;C)弯曲连杆;D)内踏板连杆;E)齿轮系统;和F)滑架板(sled plate),其大体上垂直于表面。
根据第三方面,如第二方面或任何其他方面所述的步态训练设备,其中:A)弯曲连杆可操作地连接到内踏板连杆、在前部固定点处可操作地连接到滑架板、以及可操作地连接到齿轮系统;并且B)弯曲连杆可操作以用于绕前部固定点旋转。
根据第四方面,如第三方面或任何其他方面所述的步态训练设备,其中:A)手柄连杆的一部分是第一部分;B)手柄连杆的第一部分大体上平行于表面;并且C)手柄连杆包括与第一部分形成锐角的第二部分。
根据第五方面,如第四方面或任何其他方面所述的步态训练设备,其中踏板被配置成沿着基座运动。
根据第六方面,如第五方面或任何其他方面所述的步态训练设备,其中踏板:A)包括最靠近滑架板的足趾端和最远离滑架板的足跟端;并且B)被配置成枢转,使得足趾端和足跟端随着踏板沿着基座运动而升高或降低。
根据第七方面,如第六方面或任何其他方面所述的步态训练设备,其中使踏板平行于基座运动第一特定距离引起手柄沿着弧线平行于基座运动第二特定距离,其中第二特定距离小于第一特定距离。
根据第八方面,如第七方面或任何其他方面所述的步态训练设备,其中第二特定距离与第一特定距离之间的差与普通人的臂长与腿长之间的差成比例。
根据第九方面,如第八方面或任何其他方面所述的步态训练设备,其中第二特定距离与第一特定距离之间的差至少部分地由齿轮系统控制。
根据第十方面,如第九方面或任何其他方面所述的步态训练设备,其中联动系统包括驱动连杆,该驱动连杆在中心固定点处可操作地连接到滑架板,该驱动连杆可操作以绕中心固定点旋转。
根据第十一方面,如第十方面或任何其他方面所述的步态训练设备,其中驱动连杆可操作地连接到离合器和传动系统。
根据第十二方面,如第十一方面或任何其他方面所述的步态训练设备,其中离合器是磁粉离合器。
根据第十三方面,如第十二方面或任何其他方面所述的步态训练设备,其中步态训练设备包括外踏板连杆,该外踏板连杆可操作地连接到驱动连杆和踏板。
根据第十四方面,如第十三方面或任何其他方面所述的步态训练设备,其中马达可操作地连接到离合器和传动系统,并且引起驱动连杆的旋转,从而引起外踏板连杆和踏板的运动。
根据第十五方面,如第十三方面或任何其他方面所述的步态训练设备,其中离合器和传动系统经由驱动连杆和外踏板连杆向踏板的运动提供阻力。
根据第十六方面,一种步态训练设备,包括:A)手柄,其用于训练臂部运动;B)踏板,其用于训练腿部运动;和C)联动系统,其可操作地连接到手柄和踏板,以用于使腿部运动和臂部运动同步,该联动系统包括:1)第一连接连杆;2)手柄连杆;3)弯曲连杆;4)内踏板连杆;5)齿轮系统;和6)滑架板,其大体上垂直于表面,其中踏板的运动引起:i)内踏板连杆的运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统;并且ii)齿轮系统使第一连接连杆旋转,其中:a)第一连接连杆大体上与第二连接连杆平行;b)第一连接连杆和第二连接连杆可操作地连接在手柄连杆的一部分的相对端附近;并且c)第一连接连杆的旋转引起手柄连杆以弧线运动,从而引起手柄与手柄连杆一起以弧线运动,从而大体上模仿人类行走步态的手部运动。
根据第十七方面,如第十六方面或任何其他方面所述的步态训练设备,其中联动系统包括驱动连杆,该驱动连杆在中心固定点处可操作地连接到滑架板,该驱动连杆可操作以绕中心固定点旋转。
根据第十八方面,如第十七方面或任何其他方面所述的步态训练设备,其中步态训练设备包括外踏板连杆,该外踏板连杆可操作地连接到驱动连杆和踏板。
根据第十九方面,如第十八方面或任何其他方面所述的步态训练设备,其中马达可操作地连接到离合器和传动系统,并且引起驱动连杆的旋转,从而引起外踏板连杆和踏板的运动。
根据第二十方面,如第十八方面或任何其他方面所述的步态训练设备,其中离合器和传动系统经由驱动连杆和外踏板连杆向踏板的运动提供阻力。
根据第二十一方面,一种步态训练设备,包括:A)手柄,其用于训练臂部运动;b)踏板,其用于训练腿部运动;和C)联动系统,其可操作地连接到手柄和踏板以用于使腿部运动和臂部运动同步,该联动系统包括:1)滑架板,其大体上垂直于表面;2)驱动连杆,其在中心固定点处可操作地连接到滑架板,该驱动连杆可操作以绕中心固定点旋转;3)内踏板连杆,其可操作地连接到踏板;4)弯曲连杆,其可操作地连接到内踏板连杆、在前部固定点处可操作地连接到滑架板、以及可操作地连接到齿轮系统,该弯曲连杆可操作以绕前部固定点旋转;5)手柄连杆,其可操作地连接到手柄、第一连接连杆和第二连接连杆;和6)第一连接连杆,其可操作地连接到齿轮系统并且在中间固定点处可旋转地连接到滑架板,其中:i)第一连接连杆和第二连接连杆大体上平行并且可旋转地连接到滑架板;ii)手柄连杆包括:a)第一部分,其大体上平行于表面;和b)第二部分,其与第一部分形成锐角;iii)踏板的运动引起内踏板连杆的缩回和伸展,从而引起弯曲连杆绕前部固定点旋转并接合齿轮系统;并且iv)齿轮系统使第一连接连杆绕中间固定点旋转,从而引起手柄连杆的第一部分和手柄平移。
根据第二十二方面,如第二十一方面或任何其他方面所述的步态训练设备,其中驱动连杆可操作地连接到离合器和传动系统。
根据第二十三方面,如第二十二方面或任何其他方面所述的步态训练设备,其中离合器是磁粉离合器。
根据第二十四方面,如第二十三方面或任何其他方面所述的步态训练设备,其中踏板被配置成沿着基座运动。
根据第二十五方面,如第二十四方面或任何其他方面所述的步态训练设备,其中踏板:A)包括最靠近滑架板的足趾端和最远离滑架板的足跟端;并且B)被配置成枢转,使得足趾端和足跟端随着踏板沿着基座运动而升高或降低。
根据第二十六方面,如第二十五方面或任何其他方面所述的步态训练设备,其中使踏板运动第一特定距离引起手柄经由齿轮系统平移第二特定距离,其中第二特定距离小于第一特定距离。
根据第二十七方面,如第二十六方面或任何其他方面所述的步态训练设备,其中第二特定距离与第一特定距离之间的差与普通人的臂长与腿长之间的差成比例。
根据第二十八方面,如第二十七方面或任何其他方面所述的步态训练设备,其中第二特定距离与第一特定距离之间的差至少部分地由齿轮系统控制。
根据第二十九方面,如第二十八方面或任何其他方面所述的步态训练设备,其中步态训练设备包括外踏板连杆,该外踏板连杆可操作地连接到驱动连杆和踏板。
根据第三十方面,如第二十九方面或任何其他方面所述的步态训练设备,其中马达可操作地连接到离合器和传动系统,并且引起驱动连杆的旋转,从而引起外踏板连杆和踏板的运动。
根据第三十一方面,如第三十方面或任何其他方面所述的步态训练设备,其中离合器和传动系统经由驱动连杆和外踏板连杆向踏板的运动提供阻力。
根据第三十二方面,如第三十一方面或任何其他方面所述的步态训练设备,其中踏板的运动引起外踏板连杆的运动和驱动连杆的旋转。
根据第三十三方面,一种步态训练设备,包括:A)手柄,其用于训练臂部运动;b)踏板,其用于训练腿部运动;和C)联动系统,其可操作地连接到手柄和踏板以用于使腿部运动和臂部运动同步,该联动系统包括:1)滑架板,其大体上垂直于表面;2)驱动连杆,其在中心固定点处可操作地连接到滑架板,该驱动连杆可操作以绕中心固定点旋转;3)内踏板连杆,其可操作地连接到踏板;4)弯曲连杆,其可操作地连接到内踏板连杆、在前部固定点处可操作地连接到滑架板、以及可操作地连接到齿轮系统,该弯曲连杆可操作以绕前部固定点旋转;5)手柄连杆,其可操作地连接到手柄、第一连接连杆和第二连接连杆;和6)第一连接连杆,其可操作地连接到齿轮系统并且在中间固定点处可旋转地连接到滑架板,其中:i)第一连接连杆和第二连接连杆大体上平行并且可旋转地连接到滑架板;ii)踏板的运动引起内踏板连杆的缩回和伸展,从而引起弯曲连杆绕前部固定点旋转并接合齿轮系统;并且iii)齿轮系统使第一连接连杆绕中间固定点旋转,从而引起手柄经由手柄连杆平移。
根据第三十四方面,如第三十三方面或任何其他方面所述的步态训练设备,其中驱动连杆可操作地连接到离合器和传动系统。
根据第三十五方面,如第三十四方面或任何其他方面所述的步态训练设备,其中离合器是磁粉离合器。
根据第三十六方面,如第三十三方面或任何其他方面所述的步态训练设备,其中踏板被配置成沿着基座运动。
根据第三十七方面,如第三十六方面或任何其他方面所述的步态训练设备,其中踏板:A)包括最靠近滑架板的足趾端和最远离滑架板的足跟端;并且B)被配置成枢转,使得足趾端和足跟端随着踏板沿着基座运动而升高或降低。
根据第三十八方面,如第三十六方面或任何其他方面所述的步态训练设备,其中使踏板运动第一特定距离引起手柄经由齿轮系统平移第二特定距离,其中第二特定距离小于第一特定距离。
根据第三十九方面,如第三十八方面或任何其他方面所述的步态训练设备,其中第二特定距离与第一特定距离之间的差与普通人的臂长与腿长之间的差成比例。
根据第四十方面,如第三十八方面或任何其他方面所述的步态训练设备,其中第二特定距离与第一特定距离之间的差至少部分地由齿轮系统控制。
根据第四十一方面,如第三十四方面或任何其他方面所述的步态训练设备,其中步态训练设备包括外踏板连杆,该外踏板连杆可操作地连接到驱动连杆和踏板。
根据第四十二方面,如第四十一方面或任何其他方面所述的步态训练设备,其中马达可操作地连接到离合器和传动系统,并且引起驱动连杆的旋转,从而引起外踏板连杆和踏板的运动。
根据第四十三方面,如第四十一方面或任何其他方面所述的步态训练设备,其中离合器和传动系统经由驱动连杆和外踏板连杆向踏板的运动提供阻力。
根据第四十四方面,一种步态训练方法,包括:A)经由手柄训练臂部运动;并且B)经由踏板训练腿部运动,其中:1)联动系统可操作地连接到手柄和踏板,以用于使腿部运动和臂部运动同步,该联动系统包括:i)滑架板,其大体上垂直于表面;ii)驱动连杆,其在中心固定点处可操作地连接到滑架板,该驱动连杆可操作以绕中心固定点旋转;ii)内踏板连杆,其可操作地连接到踏板;iii)弯曲连杆,其可操作地连接到内踏板连杆、在前部固定点处可操作地连接到滑架板、以及可操作地连接到齿轮系统,该弯曲连杆可操作以绕前部固定点旋转;iv)手柄连杆,其可操作地连接到手柄、第一连接连杆和第二连接连杆;和v)第一连接连杆,其可操作地连接到齿轮系统并且在中间固定点处可旋转地连接到滑架板;2)第一连接连杆和第二连接连杆大体上平行并且可旋转地连接到滑架板;3)手柄连杆包括:i)第一部分,其大体上平行于表面;和ii)第二部分,其与第一部分形成锐角;4)踏板的运动引起内踏板连杆的缩回和伸展,从而引起弯曲连杆绕前部固定点旋转并接合齿轮系统;并且5)齿轮系统使第一连接连杆绕中间固定点旋转,从而引起手柄连杆的第一部分和手柄平移。
根据第四十五方面,如第四十四方面或任何其他方面所述的步态训练方法,其中驱动连杆可操作地连接到离合器和传动系统。
根据第四十六方面,如第四十五方面或任何其他方面所述的步态训练方法,其中离合器是磁粉离合器。
根据第四十七方面,如第四十六方面或任何其他方面所述的步态训练方法,其中踏板被配置成沿着基座运动。
根据第四十八方面,如第四十七方面或任何其他方面所述的步态训练方法,其中踏板:A)包括最靠近滑架板的足趾端和最远离滑架板的足跟端;并且B)被配置成枢转,使得足趾端和足跟端随着踏板沿着基座运动而升高或降低。
根据第四十九方面,如第四十八方面或任何其他方面所述的步态训练方法,其中使踏板运动第一特定距离引起手柄经由齿轮系统平移第二特定距离,其中第二特定距离小于第一特定距离。
根据第五十方面,如第四十九方面或任何其他方面所述的步态训练方法,其中第二特定距离与第一特定距离之间的差与普通人的臂长与腿长之间的差成比例。
根据第五十一方面,如第五十方面或任何其他方面所述的步态训练方法,其中第二特定距离与第一特定距离之间的差至少部分地由齿轮系统控制。
根据第五十二方面,如第五十一方面或任何其他方面所述的步态训练方法,其中联动系统包括外踏板连杆,该外踏板连杆可操作地连接到驱动连杆和踏板。
根据第五十三方面,如第五十二方面或任何其他方面所述的步态训练方法,其中马达可操作地连接到离合器和传动系统,并且引起驱动连杆的旋转,从而引起外踏板连杆和踏板的运动。
根据第五十四方面,如第五十二方面或任何其他方面所述的步态训练方法,其中离合器和传动系统经由驱动连杆和外踏板连杆向踏板的运动提供阻力。
根据第五十五方面,如第五十四方面或任何其他方面所述的步态训练方法,其中踏板的运动引起外踏板连杆的运动和驱动连杆的旋转。
根据第五十六方面,一种步态周期训练设备,包括:A)手柄,其用于训练臂部运动;和B)踏板,其用于训练腿部运动,其中踏板运动第一特定距离引起:1)内踏板连杆的运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统;并且2)齿轮系统使第一连接连杆旋转,从而经由可操作地连接到手柄和第一连接连杆的手柄连杆而使手柄在大体上平行于手柄的纵向轴线的方向上平移第二特定距离,其中:i)第二特定距离小于第一特定距离;并且ii)第二特定距离与第一特定距离之间的差与普通人的臂长和普通人的腿长之间的差成比例。
根据第五十七方面,一种步态周期训练设备,包括:A)手柄,其用于训练臂部运动;B)踏板,其用于训练腿部运动;和C)联动系统,其可操作地连接到手柄和踏板以用于使腿部运动和臂部运动同步,该联动系统包括:1)驱动连杆,其可操作地连接到外踏板连杆;2)外踏板连杆,其可操作地连接到踏板;3)内踏板连杆,其可操作地连接到踏板;4)弯曲连杆,其可操作地连接到内踏板连杆和齿轮系统;5)手柄连杆,其可操作地连接到手柄、第一连接连杆和第二连接连杆;和6)第一连接连杆,其可操作地连接到齿轮系统,其中:i)第一连接连杆和第二连接连杆大体上平行;ii)手柄连杆包括:a)第一部分,其大体上平行于手柄的纵向轴线;和b)第二部分,其与第一部分形成锐角;iii)驱动连杆的旋转引起外踏板连杆的缩回和伸展,从而引起踏板运动;iv)踏板的运动引起内踏板连杆的缩回和伸展,从而引起弯曲连杆旋转并接合齿轮系统;并且v)齿轮系统使第一连接连杆旋转,从而引起手柄连杆的第一部分和手柄在大体上平行于手柄的纵向轴线的方向上平移。
根据第五十八方面,一种步态周期训练设备,包括:A)手柄,其用于训练臂部运动;和B)踏板,其用于训练腿部运动,其中踏板的运动引起:1)内踏板连杆的运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统;并且2)齿轮系统使第一连接连杆旋转,从而经由可操作地连接到手柄和第一连接连杆的手柄连杆而使手柄在大体上平行于手柄的纵向轴线的方向上平移。
根据第五十九方面,一种步态周期训练设备,包括:A)手柄,其用于训练臂部运动;和B)踏板,其用于训练腿部运动,其中:1)驱动连杆的旋转引起外踏板连杆的缩回和伸展,从而引起踏板运动;2)踏板的运动引起内踏板连杆的缩回和伸展,从而引起可操作地连接的弯曲连杆绕固定点旋转并接合齿轮系统;并且3)齿轮系统使第一连接连杆绕第二固定点旋转,从而经由可操作地连接到第一连接连杆和手柄的手柄连杆而使手柄在大体上平行于手柄的纵向轴线的方向上平移。
根据第六十方面,一种步态周期训练设备,包括:A)手柄,其用于训练臂部运动;和B)踏板,其用于训练腿部运动,其中踏板运动第一特定距离引起:1)内踏板连杆的运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统;并且B)齿轮系统使第一连接连杆旋转,从而经由可操作地连接到手柄和第一连接连杆的手柄连杆而使手柄在大体上平行于手柄的纵向轴线的方向上平移第二特定距离,其中:1)第二特定距离小于第一特定距离;并且2)第二特定距离与第一特定距离之间的差与普通人的臂长和普通人的腿长之间的差成比例。
根据第六十一方面,一种步态周期训练设备,包括:A)踏板,其用于训练腿部运动,该踏板与基座接触,其中踏板运动第一特定距离引起:1)内踏板连杆的运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统;并且2)齿轮系统使第一连接连杆旋转,从而经由可操作地连接到手柄和第一连接连杆的手柄连杆而使手柄在大体上平行于手柄的纵向轴线的方向上平移第二特定距离,其中:i)第二特定距离小于第一特定距离;并且ii)第二特定距离与第一特定距离之间的差与普通人的臂长和普通人的腿长之间的差成比例。
根据第六十二方面,一种步态周期训练设备,包括:A)踏板,其用于训练腿部运动,该踏板与基座接触;B)手柄,其经由联动机构和齿轮系统可操作地连接到踏板,其中:1)联动机构和齿轮系统响应踏板沿基座运动踏板距离而使手柄大体上平行于基座运动手柄距离;并且2)手柄距离与踏板距离之间的差与普通人的臂长和普通人的腿长之间的差成比例。
根据第六十三方面,如第六十二方面或任何其他方面所述的步态周期训练设备,其中:A)步态训练设备包括内踏板连杆,该内踏板连杆可操作地连接到踏板;并且B)响应于踏板沿着基座运动踏板距离,内踏板连杆运动,从而引起可操作地连接到内踏板连杆的弯曲连杆旋转并接合齿轮系统。
根据第六十四方面,如第六十三方面或任何其他方面所述的步态周期训练设备,其中,响应于踏板沿着基座运动踏板距离,齿轮系统使第一连接连杆旋转,从而经由可操作地连接到手柄和第一连接连杆的手柄连杆而使手柄在大体上平行于基部的方向上平移手柄距离。
根据第六十五方面,一种用于就座步态训练或站立步态训练的设备,包括:A)滑架,其联接到基座,该滑架包括:1)手柄,其用于训练臂部运动;和2)联动机构和齿轮系统,其可操作地连接到手柄,以用于以与普通人的臂长和腿长的比成比例的比使臂部运动与腿部运动同步,联动机构和齿轮系统可操作地连接到踏板;B)踏板,其可操作地连接到基座,至少一个踏板用于固定使用者的足部以进行步态训练;C)塔柱(tower),其可操作地连接到基座,该塔柱包括:1)至少一个可调节的座椅;和2)体重系统,其用于在步态训练期间支撑使用者的重量。
根据第六十六方面,如第六十五方面或任何其他方面所述的设备,其中塔柱包括用于在步态训练期间支撑使用者背部的座椅靠背组件。
根据第六十七方面,如第六十六方面或任何其他方面所述的设备,其中:A)塔柱包括座椅底部组件,该座椅底部组件包括至少一个可调节的座椅;并且B)座椅底部组件可操作地连接到座椅靠背组件。
根据第六十八方面,如第六十七方面或任何其他方面所述的设备,其中座椅靠背组件和座椅底部组件是可调节的,以用于就座步态训练或站立步态训练。
根据第六十九方面,如第六十八方面或任何其他方面所述的设备,其中:A)座椅底部组件可操作地连接到座椅靠背组件;并且B)在调节座椅靠背组件时,座椅底部组件大体上自动调节。
根据第七十方面,如第六十九方面或任何其他方面所述的设备,其中:A)座椅底部组件经由枢转机构铰接地连接到座椅靠背组件;并且B)座椅靠背组件的水平调节引起座椅底部组件绕枢转机构旋转。
根据第七十一方面,如第七十方面或任何其他方面所述的设备,其中:A)座椅靠背组件固定到限定枢转轨道的枢转板;B)座椅底部组件可操作地连接到利用枢转轨道定位的辊;并且C)座椅靠背组件的水平调节引起辊沿着枢转轨道行进,从而引起座椅底部组件绕枢转机构旋转。
根据第七十二方面,如第七十一方面或任何其他方面所述的设备,其中:A)枢转板是第一枢转板;B)座椅靠背组件固定到第一枢转板和第二枢转板;C)枢转轨道是第一枢转轨道;D)第二枢转板限定第二枢转轨道;E)辊定位在第一枢转轨道和第二枢转轨道内;并且F)第一枢转板和第二枢转板大体平行。
根据第七十三方面,如第七十二方面或任何其他方面所述的设备,其中座椅靠背组件可以经由致动器调节。
根据第七十四方面,一种用于就座步态训练或站立步态训练的设备,包括:A)滑架,其联接到基座,该滑架包括:1)手柄,其用于训练臂部运动;和2)踏板,其可操作地连接到基座,至少一个踏板用于固定使用者的足部以进行步态训练;和B)塔柱,其可操作地连接到基座,该塔柱包括:1)座椅靠背组件,其可经由致动器调节,以用于在步态训练期间支撑使用者的背部,并且该座椅靠背组件固定到限定枢转轨道的至少一个枢转板;2)可调节的座椅底部组件,其经由枢转机构铰接地连接到座椅靠背组件,该枢转机构可操作地连接到定位在枢转轨道内的辊,并且该可调节的座椅底部组件包括至少一个可调节的座椅,其中由致动器对座椅靠背组件的水平调节引起辊沿着枢转轨道行进,并且使座椅底部组件绕枢转机构旋转。
根据第七十五方面,如第七十四方面或任何其他方面所述的设备,其中:A)枢转板是第一枢转板;B)座椅靠背组件固定到第一枢转板和第二枢转板;C)枢转轨道是第一枢转轨道;D)第二枢转板限定第二枢转轨道;E)辊定位在第一枢转轨道和第二枢转轨道内;并且F)第一枢转板和第二枢转板大体平行。
根据第七十六方面,如第七十五方面或任何其他方面所述的设备,其中底部座椅组件的旋转大体上与座椅靠背组件的水平平移成比例。
根据第七十七方面,如第七十六方面或任何其他方面所述的设备,其中塔柱可操作地连接到旋转系统,该旋转系统用于使塔柱相对于基座旋转。
根据第七十八方面,如第七十七方面或任何其他方面所述的设备,其中:A)塔柱被配置成从第一位置旋转到第二位置;B)在第一位置,塔柱定位成相对于基座成大约90度;c)在第二位置,塔柱定位成相对于基座成大约0度。
根据第七十九方面,如第七十八方面或任何其他方面所述的设备,其中:A)使用者可以在第一位置坐在座椅组件的一部分上;并且B)使用者可以在第二位置坐在座椅组件的该部分上,并且将足部附着到踏板。
根据第八十方面,如第七十九方面或任何其他方面所述的设备,其中塔柱组件包括用于将塔柱锁定在第一位置或第二位置的锁销系统。
根据第八十一方面,如第八十方面或任何其他方面所述的设备,其中塔柱包括定位在外部部分上的锁销系统释放器。
根据第八十二方面,如第八十一方面或任何其他方面所述的设备,其中塔柱被配置成使座椅组件升高和降低。
根据第八十三方面,如第八十二方面或任何其他方面所述的设备,其中塔柱包括用于为使用者提供重量减负的体重支撑(BWS)系统。
根据第八十四方面,如第八十三方面或任何其他方面所述的设备,其中BWS系统包括可操作地连接到塔柱的头顶支架(overhead support),该头顶支架包括用于支撑使用者重量的系带系统(harness system)。
根据第八十五方面,如第八十四方面或任何其他方面所述的设备,其中BWS系统,其中头顶支架可操作地连接到力传递梁和弹簧。
根据下面结合附图对优选实施例和方面的详细书面描述,所要求保护的(多个)发明的这些和其它方面、特征和益处将是明显的,但是在不脱离本公开的新颖性概念的精神和范围的情况下,可以对其进行改变和修改。
附图简述
附图示出了本公开的一个或更多个实施例和/或方面,并且与书面描述一起用于解释本公开的原理。在任何可能的情况下,贯穿附图相同的参考数字用来指代实施例的相同或相似的元素,并且其中:
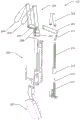
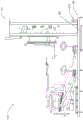
图1是根据本公开的一个实施例的示例性康复设备的透视图。
图2是根据本公开的一个实施例的示例性重量减负系统的分解视图。
图3是根据本公开的一个实施例的示例性康复设备的侧视图。
图4是根据本公开的一个实施例的示例性康复设备的侧视图。
图5是根据本公开的一个实施例的示例性坐下-站立系统的分解视图。
图6是根据本公开的一个实施例的示例性康复设备的侧视图。
图7是根据本公开的一个实施例的示例性康复设备的侧视图。
图8是根据本公开的一个实施例的示例性康复设备的侧视图。
图9是根据本公开的一个实施例的示例性塔柱的分解视图。
图10是根据本公开的一个实施例的示例性康复设备的侧视图。
图11是根据本公开的一个实施例的示例性康复设备的侧视图。
图12是根据本公开的一个实施例的示例性滑架的分解视图。
图13是根据本公开的一个实施例的示例性康复设备的侧视图。
图14是根据本公开的一个实施例的示例性康复设备的侧视图。
图15是根据本公开的一个实施例的示例性康复设备的侧视图。
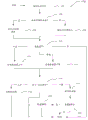
图16是示出了根据一个实施例的示例性训练过程的流程图。
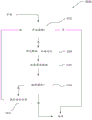
图17是示出了根据一个实施例的示例性系统配置过程的流程图。
图18是示出了根据一个实施例的示例性安全过程的流程图。
图19是示出了根据一个实施例的示例性手动训练过程的流程图。
图20是示出了根据一个实施例的示例性电动训练过程的流程图。
图21是示出了根据一个实施例的示例性BWS配置过程的流程图。
图22是示出了根据一个实施例的示例性步幅长度配置过程的流程图。
详细描述
为了促进对本公开的原理的理解的目的,现在将参考附图中图示的实施例并且将使用特定的语言来描述它们。然而应理解,在此没有由此意图限制本公开的范围;对所描述的或所阐述的实施例的任何改变和进一步修改以及在本文中所阐述的本公开的原理的任何其他应用对本公开涉及领域的技术人员而言是常见的。所有范围的限制都应根据权利要求和按照权利要求书所表达的来确定。
术语是否大写不被认为是对术语含义的定义或限制。如本文件中所使用的,大写术语应与非大写术语具有相同的含义,除非该用法的上下文特别指出大写术语旨在具有更多限制性含义。然而,除非上下文清楚地表明意在这种限制,否则本文件其余部分中的大写或不大写并不旨在一定是限制性的。
综述
本公开的方面总体上涉及用于提供步行康复的系统和方法。
在各个实施例中,本文提供了用于向受试者提供运动康复的系统、方法、过程和设备。在一个或更多个实施例中,系统可以在站立位置或就座位置中操作,并且系统可以包括使该系统在站立配置模式与就座配置模式之间转换的一个或更多个装置。例如,系统可以包括塔柱,该塔柱包含座椅系统,该座椅系统可以在就座构型(例如,其中座椅系统被配置为容纳就座的受试者)与站立构型(例如,其中座椅系统被收回,从而为系统提供空间来容纳站立的受试者)之间转变。在至少一个实施例中,系统可以允许受试者在站立构型与就座构型之间转换(并且反之亦然),而不需要使受试者离开机器。在一个或更多个实施例中,塔柱也可以是能够旋转的,使得受试者可以更容易地将其自身定位在其中的座椅系统上。例如,座椅系统可以被配置成就座构型,并且包含座椅系统的塔柱可以向外旋转90度,从而允许受限于轮椅的受试者更容易将其自身定向在其中。
在至少一个实施例中,系统可以包括一个或更多个装置,这些装置允许受试者在仅支撑其一部分自身重量的同时经历运动康复。在至少一个实施例中,系统包括体重支撑(BWS)系统,该体重支撑系统能够可控地且增量地减轻受试者重量的负载,从而潜在地降低受试者在训练期间所经受的压力和应力,并且在一些情况下,向原本可能不能执行站立锻炼的受试者提供站立运动训练。
在至少一个实施例中,系统可以包括滑架,该滑架包含一个或更多个联动系统,该联动系统允许受试者经由机械促进的并且在一些情况下电动辅助的步态周期来体验运动康复。在一个或更多个实施例中,联动系统可以提供人工步态周期,该人工步态周期大体上精确地执行自然步态周期中涉及的足部运动、腿部运动和臂部运动。例如,联动系统可以允许受试者进行典型步态周期(如本文所述)的所有阶段,包括但不限于站立末期阶段(terminal stance phase)、足趾离地阶段(toe-off phase)、摆动阶段、首次触地阶段(initial contact phase)、承重反应阶段(loading response phase)和站立中期阶段(mid-stance phase)。在一个或更多个实施例中,联动系统可以包括接纳受试者足部的踏板和受试者可以抓握(例如,用他们的手)的手柄。在各个实施例中,联动系统可以通过协调的、同时的踏板运动和手柄运动来引导踏板和手柄,协调的、同时的踏板运动和手柄运动重现了在自然步态周期中展示的足部运动和臂部运动。
例如,联动系统可以包括一个或更多个连杆,这些连杆响应于由受试者施加(例如,在踏板和/或手柄处)的平移力和/或响应于由连接的马达单元施加的旋转力而旋转和/或平移。在典型的步态周期中,足部的向前平移可能伴随着同时的反向平移。因此,联动系统可以允许踏板的向前平移和手柄的反向平移同时进行,从而提供自然步态周期的现实机械式重现。
在一个或更多个实施例中,系统可以包括离合器,该离合器允许系统在整个运动康复过程中向受试者的运动提供阻力。例如,系统可以包括磁粉离合器,该磁粉离合器可以向联动系统的运动提供受控的、增量的阻力。在至少一个实施例中,系统可以包括马达单元,该马达单元可以经由离合器可控地连接和断开。在一个或更多个实施例中,马达单元在启动时可以产生旋转力,该旋转力向接受运动康复的受试者提供电动辅助。在至少一个实施例中,连接到马达单元的离合器可以允许对提供给受试者的辅助的量级进行精确地控制和操纵。在示例性场景中,受试者可以在就座位置中通过操作联动系统来开始第一阶段的训练,其中经由马达单元提供部分辅助。然后,受试者可以在站立位置中通过操作联动系统来进行第二阶段的训练,其中受试者的一部分重量经由BWS系统和马达单元以及离合器来减负,从而提供减少的部分辅助。然后,受试者可以在站立位置中通过操作联动系统进行第三阶段的训练,其中离合器提供少量的阻力,而马达单元不提供辅助。在各个实施例中,离合器可以允许康复系统安全地适应非自主的(或自主的)受试者运动,例如跌倒、痉挛等,这是因为离合器可以允许系统踏板“滑移(slip)”。例如,如果受试者跌倒和/或经受克服由离合器配置的辅助水平的痉挛,则离合器可以允许踏板滑移。在至少一个实施例中,踏板的滑移可以降低受试者在跌倒、痉挛等过程中承受的压力负荷。
在一个或更多个实施例中,本系统可以是可配置的,并且能够调节一个或更多个系统参数和装置,以适应各种受试者的尺寸和重量。例如,BWS系统能够提供在介于大约0磅-300磅之间的可选范围内和/或在介于大约0磅-285磅之间的可选范围内的减负力。作为另一示例,系统可以包括致动机构,该致动机构可以增量地增加或减小在运动训练期间经历的步幅长度。作为一个附加的示例,系统可以包括致动机构,以用于增量地增加或减小座椅系统的高度、调节受试者与联动系统之间的距离、和/或调节受试者与手柄和/或踏板之间的距离。
在至少一个实施例中,系统可以包括一个或更多个显示器、界面、控制器和/或计算系统,其可以接收输入并且基于输入来调节一个或更多个系统配置和/或参数。在各个实施例中,系统可以包括一个或更多个传感器,以用于确认系统和/或其中的受试者的安全配置、用于收集描述受试者执行的运动康复训练的度量、和/或用于向系统配置过程提供输入。例如,系统可以包括用于测量一个或更多个系统部件的位置的位置传感器和/或接近传感器。作为另一示例,系统可以包括一个或更多个安全接触传感器,该安全接触传感器如果接合或脱离接合,则会使系统暂停训练活动(例如,通过应用制动器、使马达断开、等等)。
示例性实施例
现在参考附图,为了示例并解释所公开的系统和方法的基本过程和部件的目的,参考图1,图1示出了康复系统100的一个实施例的示例性的高度概括。如将理解和意识到的,图1所示的示例性康复系统100仅代表本系统的一种方法或实施例,并且根据本系统的各个实施例可使用其他方面。
图1是根据本公开的一个实施例的示例性康复系统100的透视图。在至少一个实施例中,康复系统100包括塔柱101和滑架103。在一个或更多个实施例中,塔柱101和/或滑架103可以安装在基座105的顶部上。在各个实施例中,基座105可以直接抵靠在地表面上,或者可以经由一个或更多个提升器或类似物从地表面向上位移。
在各个实施例中,塔柱101和/或滑架103可以以一定的方式安装在基座105的顶部上,该方式使得塔柱101和/或滑架103可以沿着基座105向前和/或向后平移(例如,滑动)。例如,基座105可以包括用于接收轮子(或促进平移运动的另一机构)的一个或更多个通道。在同一示例中,滑架103可以包括轮子,并且轮子可以以对齐的方式定位在基座105的一个或更多个通道内(从而促进沿着基座105的平移运动)。
在一个或更多个实施例中,塔柱101可以独立于轨道105和/或滑架103运行。例如,塔柱101可以出售,并且可以在不被定向在轨道105的顶部上和/或不被定向为靠近滑架103的情况下运行。在至少一个实施例中,滑架103可以独立于塔柱101和/或轨道105运行。例如,滑架103可以被出售,并且可以在不被定向在轨道105的顶部上和/或不被定向为靠近塔柱101的情况下运行。作为另一示例,塔柱101和滑架103可以在没有轨道105的情况下一起出售。在同一示例中,滑架103和塔柱101可以在没有轨道105的情况下运行(如本文所述)。
在至少一个实施例中,塔柱101可以包括体重支撑(BWS)系统107和座椅系统109。在一个或更多个实施例中,BWS系统107可以向受试者115提供重量减负。例如,BWS系统107可以产生提升力并将其传递给受试者115。提升力可以减轻由受试者115经受的重量,从而有利地减轻受试者115所经受的向下力(例如,重力)的负载。在至少一个实施例中,对于正在进行运动康复的受试者来说,重量减负可能是所希望的,这是因为受试者可能缺乏足够的力量来在站立位置支撑其总体重。因此,(经由BWS系统107的)重量减负可以成比例地减小由受试者支撑的体重的量级,从而有利地允许受试者以潜在的不太麻烦、不太累和不太痛苦的方式执行运动康复锻炼。
在至少一个实施例中,座椅系统109可以为康复系统100提供坐下-站立可配置性。在一个或更多个实施例中,座椅系统109可以包括就座构型和站立构型(和/或其他构型)。例如,座椅系统109可以包括座椅底部组件201和座椅靠背组件203(图2)。在同一示例中,当处于就座构型时,座椅底部组件201可以旋转,使得座椅底部501(图5)定位成正交于塔柱101(例如,如图1所示,使得受试者可以坐在座椅组件109上)。此外,当处于就座构型时,座椅靠背组件可以水平平移和/或伸展,使得座椅靠背507(图5)定位成靠近座椅底部501和/或与座椅底部501部分接触。
在另一示例中,当处于站立构型时,座椅底部组件203可以从其在就座构型中的位置向下旋转,并且座椅底部组件203可以被拉到座椅靠背组件203的下方并且至少部分地在塔柱101内(例如,如图4所示)。在同一示例中,座椅靠背组件203可以水平平移和/或缩回(例如,变得相对于塔柱101齐平)。在至少一个实施例中,座椅系统109的构型可以经由一个或更多个致动器的运动来确定(如本文所述),并且致动器运动可以引起座椅靠背组件203和座椅底部组件201之间的协调运动。在各个实施例中,座椅系统109的坐下-站立可配置性允许康复系统100在坐下模式或站立模式下操作,并且允许模式之间的动力转换。
在一个或更多个实施例中,在单个系统中提供就座式和站立式运动康复性能可以是有利的,这是因为受试者115可能只需要一个系统(而不是两个或更多个系统)就可执行就座式和站立式运动康复。先前的解决方案可能需要两个或更多个系统(例如,两个或更多个单独的、不同的机器)来提供就座式和站立式运动康复,因此康复系统100可以有利地降低执行位置变化式运动康复的成本。此外,康复系统100可以有利地减少专门用于在多个机器之间移动患者的训练课程时间的量,从而允许更大比例的训练课程时间来用于执行康复锻炼。
在至少一个实施例中,塔柱101可以部分地或完全地旋转(例如,相对于基座105),以允许受试者(例如,受试者115)进入或离开装置。例如,塔柱101可以以一定的方式向外旋转(例如,以逆时针方向或以顺时针方向),该方式使得塔柱101面向康复系统100的左侧和外侧(或右侧和外侧)。
在一个或更多个实施例中,滑架103可以包括联动系统111。在至少一个实施例中,联动系统111向受试者115提供步态周期运动。例如,受试者115的腿部可以固定在连接到联动系统111的踏板内。在同一示例中,联动系统111可以以受控的步态周期促进踏板沿着基座105的运动。在各个实施例中,联动系统111可以以与踏板同步的运动来使一个或更多个手柄运动(例如,平移),以实现给定的步态周期。例如,联动系统111可以与一个或更多个踏板1204的平移同步地协调一个或更多个手柄1202(图12)的基本精确的水平平移。在至少一个实施例中,联动系统111以一定的方式促进手部运动和足部运动的同步,该方式为模仿在没有辅助的典型步态周期中经历的自然的手部运动和足部运动。在一个或更多个实施例中,同步的手部运动和足部运动可以有利地改善运动康复,这是因为其中的锻炼可以在解剖学上更加全面并且在生理上更加现实。在至少一个实施例中,由康复系统100促进的同步的手部运动和足部运动可以不同于由椭圆机或类似物促进的手部运动和足部运动。例如,椭圆机不利于基本精确地模仿自然健康的步态周期期间经历的手部运动、腿部运动和足部运动的手部运动、腿部运动和足部运动。椭圆机可以促进旨在用于娱乐锻炼的夸张的腿部运动和足部运动,在娱乐锻炼中,主要的目的可能是模仿体育运动、或者有目的地从其中的受试者产生实质性用力的运动(例如,与训练受试者来执行健康的、自然的步态周期并通过电动辅助减轻用力来增量地增强受试者的力量相反)。
如本文所述的,“自然的”、“正常的”、“健康的”和/或“典型的”步态周期通常是指在双足运动期间发生的一系列事件(例如,腿部运动)。步态周期可以分为前进运动和后退运动。在一个或更多个实施例中,前进运动包括但不限于:1)站立末期,其中:a)受试者的足跟从地表面抬起,同时受试者的(同一只足部上的)足趾保持接地;b)(在身体的同一侧的)受试者的手部定位在受试者的足部的前面,部分地或全部地在受试者的身体前方;2)足趾离地,其中:a)受试者的足趾随着足跟抬起而升高;并且b)受试者的手部被拉向更靠近受试者身体的位置;和3)摆动阶段,其中:a)受试者的抬起的足部摆动到受试者的手部的前面,并且受试者的足跟和足趾向上旋转;并且b)受试者的手部横跨受试者的身体运动,并且部分地或全部地位于受试者身体的后方。在各个实施例中,后退运动包括但不限于:1)首次触地,其中:a)在摆动阶段之后,受试者的足跟与地表面接触,同时受试者的足趾保持不接地;并且b)受试者的手部定位在受试者的身体后方,与摆动阶段经历的位置进一步靠后;2)承重反应,其中:a)受试者的足部绕着接地的足跟旋转,并且受试者的足趾接地;并且b)受试者的手部定位在受试者身体的后方,但是在首次接地阶段经历的点的前面;和3)站立中期,其中:a)受试者在其另一只足部上调整和/或平衡其重量(例如,开始下一个步态周期);并且b)受试者的手部定位在受试者身体附近、受试者足部(例如,经历了站立中期阶段的足部)的前面。在至少一个实施例中,步态周期可以由足部描绘的第一弧线和由手部描绘的第二弧线表示。在一个或更多个实施例中,第一弧线可以相对地大于第二弧线。例如,在步态周期期间,足部可以描绘第一弧线,该第一弧线具有与由手部描绘的第二弧线相对相似的角度量级、但半径相对大于由手部描绘的第二弧线。在同一示例中,当足部沿逆时针方向描绘第一弧线时,手部可以沿顺时针方向描绘第二弧线(例如,而且反之亦然)。
在至少一个实施例中,康复系统100可以包括一个或更多个位置检测传感器,该位置检测传感器跟踪和记录本文所述的各种系统部件和元件的方位和位置。在一个或更多个实施例中,一个或更多个位置检测器可以包括但不限于:霍尔传感器、感应传感器、红外传感器以及其他被配置为测量和记录位置数据的传感器。例如,本文中描述的一个或更多个致动器可以包括测量、记录和报告致动器的当前位置状态的一个或更多个霍尔传感器。在同一示例中,康复系统100可以包括从每个致动器的每个霍尔传感器接收位置数据的计算环境。在至少一个实施例中,康复系统100可以将从分布在其中的传感器接收的位置数据以及其他信息存储在存储器中或经由基于云的数据存储进行存储。
图2包括根据本公开的一个实施例的示例性体重支撑(BWS)系统107和座椅系统109的部分的分解视图。在至少一个实施例中,BWS系统107可以减轻受试者的重量。例如,受试者可以位于康复系统100的塔柱101的前面(图1)。受试者可能缺乏在塔柱101内站立或以其他方式正确定位其自身所需的体力。换句话说,在没有减轻负载的情况下,受试者可能不能支撑其至少一部分自身重量。BWS系统107可以以一定的方式产生减负力并将减负力传递至受试者(如本文所述),该方式为有效地减小(或消除)由受试者经受的重量。例如,BWS系统101可以产生与向下的力(例如,由重力和受试者的质量引起的)相反的向上的力,从而减小或消除向下的力的有效量级。
在一个或更多个实施例中,座椅系统109可包括座椅底部组件201,该座椅底部组件201可操作地连接到座椅靠背组件203。例如,座椅底部组件201可以经由一个或更多个枢转板513(图5)连接到座椅靠背组件203。在各个实施例中,座椅靠背组件203可以经由BWS联动机构221可操作地连接到头顶支架205。
在各个实施例中,BWS系统107可以包括但不限于头顶支架205、力传递梁207、弹簧213、弹簧致动器217和控制器(未示出)。在一个或更多个实施例中,头顶支架205可以可操作地连接到身体系带209,并且身体系带209可以连接到受试者115或由受试者115穿戴。在至少一个实施例中,系带209可以包括一个或更多个条带和/或可以固定在受试者115周围、上方和/或下方。例如,系带209可以包括围绕受试者115的背心。背心可以包括用于附接缆绳、条带或另一连接件的一个或更多个附接点,这些附接点然后可以用于将系带115连接到头顶支架205。作为另一示例,系带209可以包括可以附接到受试者115(或者由受试者115佩戴或附接到受试者115的系带接收部)的多个缆绳、条带和/或其他连接件和紧固件。
在至少一个实施例中,头顶支架205也可以经由中央支架206可操作地连接到力传递梁207。在一个或更多个实施例中,中央支架206和力传递梁207可以呈现大体四边形的横截面,或者可以呈现大体圆形的横截面。力传递梁207可以被构造成绕被包括在BWS联动机构221中的枢转点旋转。力传递梁207可以在第一端部处连接到头顶支架205。例如,力传递梁可以被附接(例如,紧固、粘合、焊接等)到中央支架206。力传递梁207也可以连接到第一弹簧锚定件211(例如,在与附接到中央支架206相对的一端上),从而将力传递梁207联结到弹簧213。弹簧213可以附接和/或附连到第二弹簧锚定件215,并且第二弹簧锚定件215可以固定到被包括在弹簧致动器217中的弹簧致动器杆219。经由弹簧致动器217,弹簧致动器杆219可以被构造成可逆地并且可控地上下平移,从而使弹簧213拉伸和收缩。在至少一个实施例中,弹簧213的拉伸可以增加作用在力传递梁207上的向下的张紧力(例如,经由弹簧与力传递梁207之间的连接)。在一个或更多个实施例中,力传递梁207可以将向下的张紧力(经由枢转点)转变成由头顶支架205所经受的向上的提升力,并且头顶支架205可以经由系带209将向上的提升力传递给受试者115,从而减轻受试者的一部分重量或全部重量的负载。
在示例性的步态周期中,当受试者执行一步并且执行步态周期的各个阶段时,受试者的有效高度可能会上下偏移。在一个或更多个实施例中,为了适应高度偏移,头顶支架205和力传递梁207可以与步态诱发的高度偏移同步地向上和向下枢转(例如,向上和向下2英寸)。在至少一个实施例中,弹簧213可以通过与向上和向下的偏移同步地收缩(从初始位置)和伸展(回到初始位置)来容许受试者的向上和向下的偏移。在各个实施例中,适应步态诱发的高度偏移可以提供更一致的重量减负(例如,与先前的非适应性康复系统相比),从而有利地保持现实的步态周期并且潜在地降低由受试者经受的压力和应力(例如,这是因为受试者将在其整个步态周期中经历重量减负)。换句话说,自然的步态周期可能包括“颠簸”(例如,轻微的偏移)。因此,经由康复系统100提供的步态周期可以经由BWS系统107适应“颠簸”,该BWS系统107允许在受试者行走(或以其他方式进行步态周期)时轻微地竖直偏移。
在一个或更多个实施例中,弹簧致动器杆219的位置可以控制弹簧213的拉伸长度,并且弹簧213的拉伸长度可以确定由BWS系统107提供的向下的张紧力和随后的提升力。在至少一个实施例中,弹簧致动器杆219的位置可以经由一个或更多个控制器来配置。例如,弹簧致动器杆219的位置可以经由电子控制器来配置,该电子控制器被配置成与弹簧致动器通信并且向弹簧致动器传输命令。电子控制器可以传输命令,该命令使得弹簧致动器217增加或减少弹簧致动器杆219的位移(例如,从而配置杆位置)。此外,电子控制器可以从弹簧致动器接收位置信息,并且还可以从被包括在弹簧致动器223和/或BWS系统107中(例如,配置在头顶支架205与力传递梁207之间、力传递梁207与弹簧锚定件211之间、和/或第一弹簧锚定件211与弹簧213之间)的一个或更多个位置传感器、重量传感器和/或力传感器接收重量信息和/或力信息。因此,通过控制弹簧213的拉伸,BWS系统107可以可控地且增量地向配置在康复系统100内的受试者115提供起到减负作用的提升力。
在各个实施例中,BWS系统107可以包括失效保护装置223。在至少一个实施例中,失效保护装置223可以为力传递梁207提供最大枢转,并且可以防止力传递梁207和头顶支架205过度旋转(例如,如果力传递梁207变得与弹簧213断开)。例如,如果第一弹簧锚定件211发生故障,并且加载有张紧力的弹簧213变得与力传递梁207断开,则失效保护装置223可以防止力传递梁过度旋转(例如,这可能引起配置在BWS系统107中的受试者115的不期望的快速、延长的下落)。在同一示例中,力传递梁207可以经历初始枢转,但是,在与失效保护装置223接触时,力传递梁207可以停止(例如,并且因此受试者115的延长的下落可以停止)。在同一示例中,系带209还可以提供弹性缓冲以防止快速停止和/或停止下落,这是因为系带209可以弯曲,以对受试者115不期望的突然下落提供缓冲。
在至少一个实施例中,系统包括头顶支架205。在各个实施例中,头顶支架可以经由BWS联动机构221可操作地连接到座椅靠背支撑件(brace)511(图2)。在一个或更多个实施例中,头顶支架205可以包括大体“U”形构型的支撑元件。例如,头顶支架可以包括第一支撑臂,该第一支撑臂被定向成平行于第二支撑臂。第一支撑臂和第二支撑臂可以经由中央支架206可操作地连接,从而形成大体“U”形的构型。在各个实施例中,如本文所述,中央支架206可以附接到力传递梁207,从而允许中央支架206和力传递梁207作为单个单元运动。
在至少一个实施例中,大体“U”形的构型可以允许头顶支架205在两个或更多个受试者提升点(例如,受试者的腋下和/或肩部)之间均等地分配减负力。减负力在两个或更多个点之间的均等分配可以有利地为连接到BWS装置107的受试者115提供额外的支撑和稳定性。此外,减负力的均等分配可以降低由受试者和/或减负系统经受的压力和应力集中。对于经受削弱骨骼肌肉结构、增加压力相关损伤(例如,挫伤)的可能性和/或呈现一种或更多种其他走动并发症的状况和/或疾病的受试者而言,降低压力和应力集中可能是特别有利和期望的。在一个或更多个实施例中,大体“U”形的构型允许头顶支架205大体在受试者的至少一部分(例如,受试者的头部或肩部)上定向。
在一个或更多个实施例中,头顶支架205可以包括一种或更多种形状,该形状允许提升力和/或减负力围绕受试者均等分配。在至少一个实施例中,头顶支架205的形状可以包括但不限于:1)“U”形;2)一个或更多个弧形;3)一个或更多个圆;4)一个或更多个四边形;和5)一个或更多个多边形、多面体或其他形状。例如,头顶支架205可以包括圆形形状,其允许多个附接点,围绕这些附接点分配减负力(例如,而且还附接系带209)。
在各个实施例中,中央支架206可以可操作地连接到BWS联动机构221,从而将头顶支架205固定到座椅靠背支撑件511。在一个或更多个实施例中,中央支架206可以经由固定机构固定到BWS联动机构,该固定机构也允许中央支架206(例如,并且因此允许头顶支架205)围绕固定机构枢转。在至少一个实施例中,中央支架206围绕BWS联动机构221的枢转可以将来自弹簧213的向下的力转变成向上的力(例如,传递到连接的头顶支架205、系带209和受试者115)。
在至少一个实施例中,支撑附接件208可以包括一个或更多个铰接件,这些铰接件将支撑附接件208可操作地连接到头顶支架205的每个臂,并且每个臂可以围绕一个或更多个铰接件旋转。在一个或更多个实施例中,头顶支架205的每个臂可以围绕支撑附接件208(例如,以及连接的中央支架206)自由旋转,量测幅度在大约0度-90度之间。在至少一个实施例中,头顶支架205的旋转可以有利地允许头顶支架205远离座椅靠背组件203的构型,例如,在受试者115不需要BWS系统107的情况下。作为另一示例,头顶支架205的旋转也可以有利地增加进入和离开座椅系统109的便利性。
在一个或更多个实施例中,头顶支架205可以以逆时针方式从最大逆时针位置旋转到最大顺时针位置。在一个或更多个实施例中,最大逆时针位置可以指头顶支架205定位成大体正交于中轴线301(图3)的定向。在一个或更多个实施例中,最大顺时针位置可以指头顶支架205定位成大体平行于中轴线301和/或顺时针方向上与中轴线301成大于0度的定向(例如,如图3所示)。在至少一个实施例中,支撑附接件208可以包括一个或更多个止动件,该止动件限制头顶支架107围绕支撑附接件208的旋转。在一个或更多个实施例中,一个或更多个止动件可以允许头顶支架在本文中描述的角运动范围内旋转,但是可以防止旋转超过最大逆时针位置。例如,一个或更多个止动件可以允许头顶支架205在大约0度-90度(例如,顺时针)之间旋转,但是可以防止头顶支架205逆时针旋转大于0度或者顺时针旋转大于90度。在同一示例中,一个或更多个止动件可以包括背板,当头顶支架205相对于支撑附接件208旋转到大约0度时,该背板与支撑附接件208接触并且防止头顶支架205的进一步逆时针旋转。
图3是将被配置在BWS系统107启动之前的示例性康复系统100的侧视图。出于说明和描述的目的,在图3中,康复系统100的一个或更多个部分可以被去除,以允许呈现和讨论本文中提供的各种内部系统元件。在至少一个实施例中,BWS系统107在启动之前可以包括被配置为处于松弛的未拉伸状态(或者为第一拉伸状态,该第一拉伸状态量度上小于第二启动拉伸状态)的弹簧213。在一个或更多个实施例中,弹簧致动器217和弹簧致动器杆219可以处于第一伸展位置。在各个实施例中,力传递梁207和头顶支架205可以处于非弯曲和/或静止状态,并且系带209可以处于松弛状态(或者可以基本上没有张紧)。在至少一个实施例中,在BWS系统107启动之前,配置在康复系统100和BWS系统107内的受试者115可能经受受试者自身重量的全部量级,或者受试者的重量可以由座椅组件109支撑。
在示例性的非减负场景中,受试者115可以经由身体系带209固定到头顶支架205。头顶支架205可以稍微旋转到最大逆时针位置上方、稍微不正交于中轴线301放置。身体系带209可以缺乏显著的张紧力(例如,由于没有经历提升力)。弹簧致动器217和弹簧致动器杆219可以被配置为处于伸展位置,从而使弹簧213松弛。处于松弛状态(或者至少第一拉伸状态,该第一拉伸状态量度上小于第二拉伸状态)的弹簧213可以(向力传递梁107)提供最小的或静止的向下力,该力不足以减轻受试者115的大部分重量的负载。
图4是将被配置在BWS系统107启动期间的示例性康复系统100的侧视图。在至少一个实施例中,BWS系统107在启动时可以包括被配置为处于拉伸状态(或者启动拉伸状态,该启动拉伸状态量度上大于第一拉伸状态)的弹簧213。在一个或更多个实施例中,弹簧致动器217和弹簧致动器杆219可以处于第二缩回位置(从而引起弹簧拉伸)。在各个实施例中,力传递梁207和头顶支架205可以处于弯曲加载状态(例如,由于弹簧的拉伸而产生额外的向下的张紧力),并且可以将(来自弹簧213的)向下力转变成提升力。在至少一个实施例中,提升力可以被传递到身体系带209,从而将身体系带209配置成张紧状态,并且将提升力传递给受试者115。在至少一个实施例中,配置在BWS系统107内的受试者115可能经受部分量级的受试者自身重量(例如,与弹簧的拉伸长度成比例)。在一个或更多个实施例中,由于受试者115经受了其一部分重量的减负,因此受试者115可以更加有能力地执行运动康复活动。
在示例性的非减负场景中,受试者115可以经由身体系带209固定到头顶支架105。头顶支架205可以旋转到最大逆时针位置(例如,稍微不正交于中轴线301放置)。身体系带209可能没有显著的张紧力(例如,由于没有经历提升力)。弹簧致动器217和弹簧致动器杆219可以被配置为处于伸展位置,从而使弹簧213松弛。处于松弛状态(或至少第一拉伸状态,该第一拉伸状态量度上小于第二拉伸状态)的弹簧213可以(向力传递梁207)提供最小的或静止的向下力,该力不足以减轻受试者115的大部分重量的负载。
图5是根据本公开的一个实施例的示例性座椅系统109的分解视图。在至少一个实施例中,座椅系统109可以包括但不限于:座椅底部组件201、座椅靠背组件203和一个或更多个枢转板513。例如,座椅系统109可以包括两个枢转板513。在同一示例中,座椅靠背组件203可以牢固地附接到这两个枢转板513,并且座椅底部组件201可以附接到座椅靠背组件203和两个枢转板513这二者。在一个或更多个实施例中,座椅靠背组件203可以包括但不限于:座椅靠背507、座椅背板509和座椅靠背支撑件511。在至少一个实施例中,座椅系统109和被包括在其中的元件可以包括一种或更多种材料,这些材料包括但不限于:1)金属(诸如,例如不锈钢);2)聚合物(例如,能够承受本文所述的动作期间产生的压力和应力的耐用塑料);3)填充材料(如,诸如,例如,橡胶填料、聚合物基填料等)。
在各个实施例中,座椅底部组件201可以包括但不限于:1)附接到座椅底部支撑件503的座椅底部501;2)枢转机构504;和3)一个或更多个枢转板辊505。在一个或更多个实施例中,枢转板513可以包括但不限于:枢转轨道515、致动器间隙孔517和致动器板接收部521。在至少一个实施例中,枢转板辊505可以定位在枢转轨道515内,并且可以被配置为沿着枢转轨道515自由平移。继续上述示例,两个枢转板513可以各自包括枢转轨道515。在同一示例中,两个枢转轨道515可以接纳枢转板辊505。在至少一个实施例中,枢转板辊505可以包括允许沿着枢转轨道515旋转的轴承和/或轮系。在一个或更多个实施例中,枢转板513及其元件可以包括一种或更多种材料,这些材料包括但不限于:1)金属(诸如,例如不锈钢);2)聚合物(例如,能够承受本文所述的动作期间产生的压力和应力的耐用塑料);3)填充材料(如,诸如,例如,橡胶填料、聚合物基填料等)。
在至少一个实施例中,座椅靠背支撑件511可以包括枢转机构504。在各个实施例中,座椅底部支撑件503可以可操作地附接到枢转机构504(例如,通过杆、辊或类似物)。在一个或更多个实施例中,枢转机构504可以包括但不限于:允许座椅底部组件201围绕枢转机构504旋转的杆、辊、铰接件或类似物。
在至少一个实施例中,座椅靠背组件203的水平平移可以经由枢转机构504、枢转轨道515和枢转辊505转变成座椅底部组件201的旋转俯仰。因此,在各个实施例中,枢转机构504、枢转轨道515和一个或更多个枢转辊505可以允许座椅底部组件201与座椅靠背组件203的水平平移成比例地自动旋转。在一个或更多个实施例中,座椅靠背组件203和座椅底部组件201的同时平移和旋转可以被称为“坐下-站立”过渡。在各个实施例中,坐下-站立过渡可以包括但不限于:1)坐下-站立致动器523和一个或更多个致动器控制杆529的伸展(或缩回);2)座椅靠背组件203向前(或向后)水平平移;和3)座椅底部组件201与座椅靠背组件203的水平平移成比例的顺时针(或逆时针)旋转。
例如,枢转机构504可以经由可自由旋转的杆连接到座椅底部支撑件503。枢转机构504可以附接到座椅靠背支撑件511的下后部部分和/或与其一体形成。座椅靠背支撑件511可以经由四个致动器控制杆529(或其任何合适的数量)连接到坐下-站立致动器523,并且坐下-站立致动器523可以伸展和缩回,从而引起座椅靠背组件201的水平平移。座椅装置109可以附接到两个平行的枢转板513并且被配置在这两个枢转板513之间,并且两个枢转辊可以定位在每个枢转板513的枢转轨道515内。在坐下-站立支架致动器523伸展之前,两个枢转辊可以定位在每个枢转轨道515的顶部处。当坐下-站立致动器523伸展时,四个致动器控制杆和座椅靠背组件203可以从座椅系统109水平向外平移。随着座椅靠背组件203水平平移,枢转机构504内的杆也可以横向平移,试图使座椅底部组件201水平平移。同时,枢转辊515可以沿着枢转轨道515向下平移,并且枢转辊515的运动可以将水平平移的相互作用(发生在枢转机构504处)转换成旋转的相互作用。旋转的相互作用可以使座椅底部组件201围绕枢转机构504旋转与由座椅靠背组件203经历的水平平移的量级成比例的量级。例如,座椅底部组件201可以对于座椅靠背组件203经历的每5cm的水平平移(例如,在远离座椅系统109的方向上)而顺时针旋转5度。在至少一个实施例中,座椅底部组件201的旋转和座椅靠背组件203的平移可以以固定的比率发生,该固定的比率的量值在大约0:1与0:10之间、大约1:1与1:10之间、大约1:0与10:0之间、大约1:1与10:1之间或一个或更多个其他比率。
在各个实施例中,座椅底部组件201围绕枢转机构504的旋转可以引起枢转辊505沿枢转轨道515向上或向下平移。例如,座椅底部组件201可以相对于竖直方向成-30度的第一角度定向。在同一示例中,当座椅底部组件201绕枢转机构504顺时针旋转时(例如,朝向相对于竖直方向大约+90度的第二角度),枢转辊505可以沿着(例如,布置在彼此平行定向的两个枢转板513中的)两个枢转轨道515向下平移。
在至少一个实施例中,致动器间隙孔517可以接纳坐下-站立致动器523的一部分。在一个或更多个实施例中,坐下-站立致动器523可以附接到致动器背板525,并且致动器背板525可以可操作地联接到致动器板接收部521。在各个实施例中,坐下-站立致动器523可以可操作地联接到座椅靠背支撑件511。在一个或更多个实施例中,坐下-站立致动器523的伸展可以引起座椅靠背组件203的水平平移。在至少一个实施例中,座椅靠背支撑件511也可以固定到枢转机构504。在各个实施例中,座椅靠背组件203的平移可以引起枢转机构504的水平平移。在至少一个实施例中,枢转机构504的水平平移可以使座椅底部组件201围绕枢转机构504旋转,从而使枢转辊505沿着枢转轨道515平移。
在各个实施例中,座椅底部组件201可以独立于座椅靠背组件203旋转。例如,座椅底部组件201可以可操作地连接到座椅底部组件致动器,该座椅底部组件致动器向座椅底部支撑件503提供平移力,该平移力经由一个或更多个枢转辊505和一个或更多个枢转轨道515被转换成旋转力。在同一示例中,座椅底部组件201可以不附接到座椅靠背组件203,从而允许它们之间的独立运动。在同一示例中,因为座椅底部组件201连接到其自身的座椅底部组件致动器,所以座椅底部组件201可以独立于座椅靠背组件203的平移和/或致动而旋转。在至少一个实施例中,座椅底部组件201的旋转可以经由在座椅底部组件201下方平移的楔形件或类似物的伸展和缩回来实现。例如,楔形件可以在座椅底部组件201下方平移,并且可以向上驱动座椅底部组件201,并且经由一个或更多个枢转辊505和一个或更多个枢转轨道515引起座椅底部组件201旋转。
在至少一个实施例中,座椅靠背支撑件511可以连接(例如,附接)到一个或更多个坐下-站立板527。在一个或更多个实施例中,每个坐下-站立板527可以连接到一个或更多个控制杆529。例如,每个坐下-站立板527可以是大体上矩形的板,并且控制杆529可以附接到坐下-站立板527的一侧的每一端。在同一示例中,控制杆横梁535可以连接到控制杆529并且在控制杆529之间形成连接。在各个实施例中,一个或更多个控制杆轮533可以以一定的方式附接到枢转板513,该方式使得轮533定位在上方和/或下方并且与一个或更多个控制杆529接触。在上述示例中,每个控制杆529可以搁置在两个控制杆轮533的顶部上,并且两个附加的控制轮533可以与每个控制杆529的顶表面接触。在同一示例中,控制杆轮533可以允许控制杆529水平平移(例如,响应于致动器523的缩回和伸展)。在各个实施例中,一个或更多个控制杆529的平移可以引起座椅靠背组件203的平移,从而经由枢转机构504、枢转辊505和一个或更多个枢转轨道515引起座椅底部组件201的旋转。
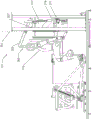
图6是示例性康复系统100的侧视图,其以示例性就座构型示出。在各个实施例中,康复系统100包括塔柱101,该塔柱101包括被配置处于就座构型的座椅系统109。在至少一个实施例中,仅出于说明和描述的目的,图6-图8可以示出移除了前柱的塔柱101,以允许更好地观察其中的部件。在一个或更多个实施例中,就座构型包括但不限于:1)大体上平行于水平轴线601定位的座椅底部组件201;2)从塔柱101向外伸展的座椅靠背组件203;3)从塔柱101向外伸展的一个或更多个致动器控制杆529;4)处于伸展位置并从塔柱101向外突出的坐下-站立致动器523;和5)定位在枢转轨道515的底部点处的一个或更多个枢转辊505。在至少一个实施例中,在就座构型中,坐下-站立致动器523的伸展经由座椅靠背支撑件511、坐下-站立致动器523和一个或更多个致动器控制杆529之间的连接引起座椅靠背组件203的水平平移。在各个实施例中,座椅靠背组件203远离塔柱101的水平平移在枢转机构504处产生平移力。在至少一个实施例中,平移力经由一个或更多个枢转辊505和一个或更多个枢转轨道515转变成座椅底部组件201绕枢转机构504的顺时针旋转运动。在一个或更多个实施例中,随着座椅靠背组件203水平平移,围绕机构504的旋转运动连续进行,并且旋转运动的量级可以与水平平移的量级成比例。例如,最大水平平移(例如,远离塔柱101)可以引起绕枢转机构504的最大顺时针旋转。
在一个或更多个实施例中,一个或更多个控制杆529可以定位在一个或更多个控制杆轮533的顶部上和/或两个或更多个控制杆轮533之间。在至少一个实施例中,一个或更多个杆轮533可以减小使座椅靠背组件203水平平移并且(例如,经由枢转机构504、枢转轨道515和枢转辊505)使座椅底部组件201旋转所需的力的量级。例如,由于形成支撑座椅靠背组件203和座椅底部组件201的轮轨系统,一个或更多个杆轮533可以减小静摩擦系数和动摩擦系数,并且提供用于使座椅靠背组件203平移的轮式机构。
图7是示例性康复系统100的侧视图,其以示例性过渡构型示出。在各个实施例中,康复系统100包括塔柱101,塔柱101包括座椅系统109,座椅系统109被布置成处于如在坐下-站立过渡期间(例如,在就座构型与站立构型之间)所经历的过渡构型。在一个或更多个实施例中,过渡构型包括但不限于:1)以与水平轴线601成锐角和/或成大体上互补的角度定位(例如,与轴线601成大于0度且小于120度的角度定位)的座椅底部组件201;2)从向外伸展的位置朝向塔柱101缩回的座椅靠背组件203;3)从向外伸展的位置朝着塔柱101缩回的一个或更多个致动器控制杆;4)处于缩回位置并朝向塔柱101向后平移的坐下-站立致动器523;和5)定位在枢转轨道515的中点处的一个或更多个枢转辊505。在至少一个实施例中,在过渡构型中,坐下-站立致动器523的缩回经由座椅靠背支撑件511、坐下-站立致动器523以及一个或更多个致动器控制杆529之间的连接来引起座椅靠背组件203的水平平移。在各个实施例中,座椅靠背组件203朝向塔柱101的水平平移在枢转机构504处产生平移力。在至少一个实施例中,平移力经由一个或更多个枢转辊505和一个或更多个枢转轨道515转变成座椅底部组件201绕枢转机构504的逆时针旋转运动。在一个或更多个实施例中,随着座椅靠背组件203水平平移,绕机构504的旋转运动连续进行,并且旋转运动的量级可以与水平平移的量级成比例。例如,部分水平平移(例如,朝向塔柱101)可以引起绕枢转机构504的部分逆时针旋转。在至少一个实施例中,座椅底部组件201的旋转与座椅靠背组件203的平移之间的比的量值可以为每平移一英寸则旋转大约7.5度。例如,对于量值为大约16英寸的座椅靠背组件203的平移,座椅底部组件201可以旋转大约120度。在一个或更多个实施例中,平移-旋转比可以经由修改和/或替换一个或更多个枢转轨道515或本文所述的其他系统元件来进行调节。
图8是示例性康复系统100的侧视图,其示出了示例性站立构型。在各个实施例中,康复系统100包括塔柱101,塔柱101包括座椅系统109,该座椅系统被布置成处于如经由坐下-站立过渡(例如,从就座构型转换到站立构型之后)来实现的站立构型。在一个或更多个实施例中,站立构型包括但不限于:1)与水平轴线601成钝角定位(例如,与轴线601成约120度角定位)的座椅底部组件201;2)完全缩回抵靠塔柱101的座椅靠背组件203;3)从向外伸展的位置完全缩回到塔柱101中的一个或更多个致动器控制杆529;4)在塔柱101内处于完全缩回位置的坐下-站立致动器523;和5)定位在枢转轨道515的顶点处的一个或更多个枢转辊505。在至少一个实施例中,在站立构型中,坐下-站立致动器523的完全缩回引起座椅靠背组件203抵着塔柱101完全水平平移。在各个实施例中,座椅靠背组件203抵着塔柱101的完全水平平移在枢转机构504处产生并保持平移力,该平移力引起座椅底部组件201的完全逆时针旋转。在至少一个实施例中,平移力经由一个或更多个枢转辊505和一个或更多个枢转轨道515转变成座椅底部组件201围绕枢转机构504的逆时针旋转运动。在一个或更多个实施例中,随着座椅靠背组件203水平平移,围绕机构504的逆时针旋转运动连续进行。例如,完全水平平移(例如,抵着塔柱101)可以引起绕枢转机构504的完全逆时针旋转(例如,量值为大约120度)。
图9是示例性塔柱101的分解视图。在一个或更多个实施例中,塔柱101包括顶板901和底板907。在至少一个实施例中,一个或更多个后柱903和一个或更多个前柱905可以附接到顶板901和底板907并且定位在顶板901和底板907之间。在至少一个实施例中,后柱903和/或前柱905可以呈现四边形的横截面、圆形的横截面或一种或更多种其他的横截面形状。在一个或更多个实施例中,塔柱101可以包括附接到底板907的座椅高度联动机构908和座椅高度致动器909(例如,将座椅高度致动器909固定到底板907)。在至少一个实施例中,座椅高度致动器909包括高度臂911,该高度臂911可以固定到高度板913。在各个实施例中,高度臂911可以被接纳在一个或更多个高度板接收部915下方,并且可操作地连接到该一个或更多个高度板接收部915。在一个或更多个实施例中,高度臂911的伸展和缩回可以引起高度板913的提升和下降。因为高度板913可以附接到座椅系统109,所以高度板913的提升和下降可以引起座椅系统109和BWS系统107的对应的提升和下降。在一个或更多个实施例中,座椅高度致动器可以允许座椅系统109和BWS系统107竖直地定位在大约1英尺-6英尺之间的高度处。例如,经由座椅高度致动器909、座椅系统109和BWS系统107可以定位在大约1.0英尺-1.5英尺之间、大约1.5英尺-2.0英尺之间、大约2.0英尺-2.5英尺之间、大约2.5英尺-3.0英尺之间、大约3.5英尺-4.0英尺之间、大约4.0英尺-4.5英尺之间、大约4.5英尺-5.0英尺之间、大约5.0英尺-5.5英尺之间或大约5.5英尺-6英尺之间的高度处。
例如,座椅高度致动器909和高度臂911可以最初配置成处于完全缩回位置。当处于缩回位置时,座椅系统109和BWS系统107可以定位在第一高度(例如,相对于底板907高16英寸)处。在座椅高度致动器909和高度臂911启动和伸展时,座椅系统109和BWS系统107可以在连接到高度臂911的两个高度板909处经受提升力。提升力可以将座椅系统109和BWS系统107提升到大于第一高度的第二高度(例如,相对于底板907为5英尺)。
作为另一示例,座椅高度致动器909和高度臂911可以最初配置成处于最大伸展位置,从而使得连接的座椅系统109和BWS系统107定位在最大高度处。例如,座椅系统109可以定位在大约60英寸(例如,在座椅底部支撑件503的底面与底板907的顶表面之间测得)的最大高度处。在同一示例中,BWS系统107可以定位在大约82英寸(例如,在头顶支架205的底侧与底板907的顶表面之间测得)的最大高度处。在座椅高度致动器909和高度臂911启动和缩回时,座椅系统109和BWS系统107可以在连接到高度臂911的两个高度板909处经受向下力。该向下力可以将座椅系统109和BWS系统107降低到小于第一高度的第二高度(例如,相对于底板907为16英寸)。
在各个实施例中,座椅高度致动器909和高度臂911可以支撑座椅系统109和BWS系统107的全部重量,并且还可以支撑定位在其中的受试者115的全部重量。在至少一个实施例中,座椅高度致动器909和高度臂911可以支撑重达约300磅的受试者115。例如,座椅高度致动器909和高度臂919可以支撑重量在约0磅-50磅之间、约50磅-100磅之间、约75磅-200磅之间、约200磅-250磅之间或约250磅-300磅之间的受试者115。
在至少一个实施例中,塔柱101可以进一步包括但不限于旋转系统917。在各个实施例中,旋转系统917可以附接到底板907的底表面。在一个或更多个实施例中,旋转系统917可以包括允许底板907围绕旋转系统917旋转的一个或更多个支承子系统。在一个或更多个实施例中,因为塔柱101可以附接到底板907,并且底板907可以经由旋转系统917旋转,所以塔柱101也可以经由旋转系统917旋转。例如,塔柱101可以从初始位置逆时针旋转大约90度。在至少一个实施例中,塔柱101的初始位置可以指塔柱101相对于轨道105旋转0度的角位置(图1)。
在各个实施例中,塔柱101经由旋转系统917的旋转可以经由锁销系统919来控制。在至少一个实施例中,基座105可以包括用于接纳销或类似物的一个或更多个空隙,该空隙防止塔柱101经由底板907和旋转系统917旋转。例如,锁销系统919可以包括弹簧加载的销机构,当销与被包括在基座105的基座板中的一个或更多个锁定空隙对准时,该弹簧加载的销机构自动接合。在同一示例中,一个或更多个锁定空隙可以沿着弧形周期性地定位,从而提供塔柱101可以旋转到的增量旋转位置。通过收回弹簧加载的销机构(例如,由此使锁销系统919脱离接合)并且使塔柱旋转直到锁销系统919与特定的锁定空隙对准,塔柱101可以旋转到任何增量位置。当锁销系统919与特定的锁定空隙对准时,弹簧加载的销机构可以被释放,并且可以向下突出到锁定空隙中,从而使塔柱101的新的旋转定向固定。
在一个或更多个实施例中,塔柱101的旋转可以电子方式控制和/或促进。例如,旋转可以经由马达系统来控制,该马达系统在接收到命令或输入(例如,来自控制面板、经由GUI选择等)时可操作以使塔柱101旋转。在各个实施例中,旋转系统907和/或锁销系统919可以包括用于接合锁和使锁脱离接合和/或促进旋转的部件,并且可以包括用于接收引起锁接合/脱离接合和/或促进旋转的输入的部件。
在至少一个实施例中,塔柱101和被包括在其中的元件可以包括一种或更多种材料,这些材料包括但不限于:1)一种或更多种金属(如,诸如,例如,不锈钢);2)一种或更多种聚合物(如,诸如,例如,能够承受本文所述的一种或更多种操作中产生的压力和应力的耐用聚合物);以及3)填充材料(例如,橡胶、软聚合物和其他软材料)。
图10是示例性康复系统100的侧视图。在各个实施例中,在图10中,康复系统100示出为处于塔柱101旋转之前的构型。在一个或更多个实施例中,塔柱101可以附接在底板907的顶部上,并且底板907可以附接到旋转系统917。在至少一个实施例中,旋转系统917可以定位在底板907与基座105之间。在各个实施例中,在图10中,塔柱101可以示出为处于初始角位置,相对于基座105成0度定位。在至少一个实施例中,塔柱101的旋转可以经由锁销系统919来控制。
图11是示例性康复系统100的侧视图。出于说明和描述的目的,在图11中,康复系统100的一个或更多个部分可以被去除,以允许呈现和讨论本文提供的各种内部系统元件。在各个实施例中,在图11中,康复系统100示出为处于塔柱101旋转之后的构型中。在一个或更多个实施例中,塔柱101可以附接在底板907的顶部,并且底板907可以附接到旋转系统917。在至少一个实施例中,旋转系统917可以定位在底板907与基座105之间。在各个实施例中,在图11中,塔柱101可以示出为处于旋转的角位置,相对于基座105以旋转大约90度的方式定位。在至少一个实施例中,塔柱101的旋转可以经由包括弹簧加载的销机构的锁销系统919来控制。在一个或更多个实施例中,塔柱101的旋转的角位置可以经由将弹簧加载的销接纳在被包括在基座的基座板中的锁定空隙内来固定。
例如,为了使塔柱101旋转,锁销机构可以从第一锁定空隙中收回。当收回锁销机构时,锁销系统919可以脱离接合,并且塔柱101可以经由旋转系统917自由旋转。在塔柱101旋转之后(例如,逆时针方向旋转大约90度),锁销机构可以自动地展开到第二锁定空隙中,该第二锁定空隙沿着圆弧与第一锁定空隙沿逆时针方向成大约90度定位。锁销机构的展开可以使锁销系统919接合,并且使塔柱101的新的旋转的角位置固定。
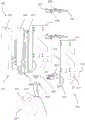
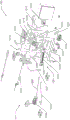
图12是根据本公开的一个实施例的示例性滑架103的分解视图。在一个或更多个实施例中,滑架103可以包括联动系统111。在至少一个实施例中,联动系统111可以提供使跨步的腿部运动与平移的手部运动同步的行走运动,从而提供大体生理上准确的步态周期。在各个实施例中,联动系统111可以包括但不限于:驱动连杆1201、外踏板连杆1203、内踏板连杆1205、弯曲连杆1207、第一连接连杆1209、手柄连杆1211和第二连接连杆1213。在至少一个实施例中,联动系统111可操作地连接到踏板1204和手柄1202,并且同步地协调踏板1204和手柄1202的运动。在一个或更多个实施例中,联动系统111和被包括在其中的元件可以包括材料,这些材料包括但不限于:1)金属(如,诸如,例如,不锈钢);和2)塑料(例如,适于机械操作并且能够承受由此产生的压力和应力的聚合物)。在一个或更多个实施例中,本文所述的一个或更多个连杆可以呈现大体四边形的横截面(如,例如,矩形横截面),或者可以呈现圆形的横截面、三角形的横截面或一个或更多个其他的横截面形状。
在至少一个实施例中,驱动连杆1201可以以一定的方式连接到滑架板1206,该方式使得驱动连杆1201可以围绕连接点旋转。例如,驱动连杆1201可以连接到驱动连杆机构1215,该驱动连杆机构1215将驱动连杆1201固定在滑架板1206内,但是也允许驱动连杆1201旋转。在一个或更多个实施例中,踏板1204可以连接到外踏板连杆1203和内踏板连杆1205。在至少一个实施例中,驱动联动机构1233可以以一定的方式可操作地将外踏板连杆1203连接到驱动连杆1201,该方式使得驱动连杆1201的旋转引起外踏板连杆1203(例如,相对于踏板1204)的缩回和伸展。
在示例性场景下,驱动连杆1201可以绕中心轴线在0度-360度之间顺时针旋转。在0度时,外踏板连杆1203(经由驱动联动机构1233连接到驱动连杆1201)可以定位在初始跨步位置,连接到外踏板连杆1203的踏板1204可以处于站立中期阶段,并且手柄1202可以定位在站立中期阶段。当驱动连杆1201从0度旋转时,驱动联动机构1233可以向前拉动外踏板连杆1203,从而使外踏板连杆1203朝向滑架103平移。外连杆1203的平移可以引起踏板1204的平移,从而拉动踏板1204经过站立末期阶段和足趾离地阶段。外连杆1205的平移可以引起手柄1202部分地沿弧线行进,从而拉动手柄1202经过站立末期阶段和足趾离地阶段。一旦驱动连杆1201旋转约180度,则外踏板连杆1203可以处于最大向前平移点处。随着外踏板连杆1203接近最大向前平移点,连接的踏板1204和手柄1202(继续沿着弧线行进)可以经历首次触地阶段,并且在达到180度旋转时,经历承重反应阶段。随着驱动连杆1201继续旋转,驱动联动机构1233可以使外踏板连杆1203向后平移、远离滑架103,并且踏板1204和手柄1202(例如,现在沿相反方向沿弧线行进)可以被拉入到随后的站立中期阶段。因此,在一个或更多个实施例中,驱动连杆1201的完整旋转可以对应于完整的步态周期。
在各个实施例中,内踏板连杆1205可以可操作地连接到弯曲连杆1207,并且弯曲连杆1207可以可操作地连接到齿轮系统1210,从而将弯曲连杆1207固定到滑架板1206,但是仍然允许围绕该连接部旋转。在一个或更多个实施例中,弯曲连杆1207可以是大致镰刀形的。例如,弯曲连杆1207可以包括大体直的第一区段和大体弯曲的第二区段。弯曲的第二区段的终点可以与直的第一区段的终点成大约15度-85度之间的角度。在各个实施例中,弯曲连杆1207可以表现出量值在大约15英寸-20英寸之间的曲率半径。例如,弯曲连杆1207可以表现出量值为大约16英寸的曲率半径。在至少一个实施例中,弯曲连杆1207的曲率可以减小弯曲连杆1207的空间轮廓,并且可以允许联动系统111内的部件的密度增加,从而有利地最小化滑架103的尺寸。
在各个实施例中,随着驱动连杆1201旋转并且踏板1204和外踏板连杆1203平移,内踏板连杆1205也可以平移。在至少一个实施例中,内踏板连杆1205的平移可以引起弯曲连杆1207围绕弯曲连杆1207与齿轮系统1210之间的连接部的部分旋转。
参考上述示例性场景,随着驱动连杆1201从大约0度旋转到180度,内踏板连杆1205可以从初始平移位置向前平移,并且引起弯曲连杆1207从初始旋转位置部分地旋转(例如,沿逆时针方向)。当驱动连杆1201达到大约180度旋转时,内踏板连杆1205可以处于最大向前平移点处,并且弯曲连杆1207可以处于最大顺时针旋转点处。随着驱动连杆1201从大约180度旋转到360度,内踏板连杆1205可以向后平移、远离滑架1203,并且弯曲连杆1207可以顺时针旋转。当驱动连杆1201达到大约360度的旋转时,内踏板连杆1205可以平移回到初始平移位置,并且弯曲连杆1207可以顺时针旋转回到初始旋转位置。因此,在各个实施例中,弯曲连杆1207可以以周期性运动旋转。例如,在驱动连杆1201完全旋转一周期间,弯曲连杆1207可以从初始位置向前旋转大约45度-135度(例如,在完全旋转的前半部分期间),并且返回到初始位置(例如,在完全旋转的后半部分期间)。在一个或更多个实施例中,弯曲连杆1207的周期性旋转可以使踏板1204的运动与手柄1202的运动同步。
在至少一个实施例中,齿轮系统1210可以可操作地连接到第一连接连杆1209。在各个实施例中,第一连接连杆1209和第二连接连杆1213可以以允许围绕连接部旋转的方式连接到滑架板1206。在一个或更多个实施例中,外踏板连杆1203的平移可以引起内踏板连杆1205的对应平移。在至少一个实施例中,内踏板连杆1205的平移可以引起弯曲连杆1207的旋转,并且传递性地引起齿轮系统1210的旋转。在各个实施例中,齿轮系统1210的旋转可以引起第一连接连杆1209的旋转(例如,在与弯曲连杆1207的旋转相反的方向上)。例如,随着弯曲连杆1207顺时针旋转,齿轮系统1210可以引起第一连接连杆1209逆时针旋转,并且随着弯曲连杆1207转换到逆时针旋转,齿轮系统1210可以引起第一连接连杆1209顺时针旋转。
在至少一个实施例中,第一连接连杆1209可以可操作地连接到手柄连杆1211,并且第一连接连杆1209的旋转可以引起手柄连杆1211的平移。在一个或更多个实施例中,手柄连杆1211可以可操作地连接第二连接连杆1213。在至少一个实施例中,手柄连杆1211可以以允许绕一个或更多个连接点旋转的方式连接到第一连接连杆1209和第二连接连杆1213。
在各个实施例中,手柄连杆1211可以经由手柄联动机构1214连接到手柄1202。在一个或更多个实施例中,手柄连杆1211可以包括大致“V”形的形状,其包括成锐角定向的第一区段和第二区段。例如,第一区段与第二区段之间的角度可以测量为大约60度。在至少一个实施例中,第一区段可以平行于轨道105(图1)定向。在至少一个实施例中,第一连接连杆1209可以连接在第一区段处,而第二连接连杆1213和手柄1202可以连接在第二区段处。在一个或更多个实施例中,手柄连杆1211的锐角可以有利地增加滑架103的部件密度,从而有利地减小滑架103的空间轮廓。
在各个实施例中,第一连接连杆1209和第二连接连杆1213可以定位在滑架板1206上、大体彼此平行且齐平。在各个实施例中,随着第一连接连杆1209和第二连接连杆1213围绕它们与滑架板1206的连接部旋转,手柄连杆1211与第一连接连杆1209和第二连接连杆1213之间的上述定位连接和旋转连接可以允许手柄连杆1211以大体弧形的方式平移。在至少一个实施例中,第一连接连杆1209可以操作,以围绕第一连接连杆1209与滑架板1206之间的中间点旋转,该第一连接连杆可以接合齿轮系统1210和/或以其他方式引起手柄连杆1211的旋转。在一个或更多个实施例中,第二连接连杆1213可以操作,以绕第一连接连杆1213与滑架板1206之间的固定后部点旋转。在至少一个实施例中,弯曲连杆1207可以操作,以围绕弯曲连杆1207和/或滑架板1206或齿轮系统1210之间的前部固定点旋转。在一个或更多个实施例中,弯曲连杆1207可以在前部固定点处以一定的方式可操作地连接到滑架板1206,该方式为允许弯曲连杆1207围绕前部固定点旋转并且使齿轮系统1210旋转。
例如,齿轮系统1210的旋转可以引起第一连接连杆1209旋转。第一连接连杆1209的旋转可以在连接连杆1209与手柄连杆1211之间的连接部处产生旋转力。手柄连杆1211与第二连接连杆1213之间的连接部可以将旋转力转变成手柄连杆1211的大体弧形的平移。随着第一连接连杆1209和第二连接连杆1213以平行且逆时针的方式旋转,手柄连杆1211可以朝向踏板1204平移。在各个实施例中,手柄连杆1211的平移可以引起手柄1202在相同方向上的反向平移。在各个实施例中,因为第一连接连杆1209的旋转可以是周期性的并且以顺时针和逆时针的方式发生,所以手柄连杆1211也可以以周期性的方式平移,从而引起手柄1202的周期性平移,这模仿了整个步态周期中上肢的平移。
在至少一个实施例中,驱动连杆1201的旋转可以经由马达单元1217引起。在一个或更多个实施例中,马达单元1217可以可操作地连接到传动装置1219。传动装置1219可以包括连接到第一皮带1221的输出端,该第一皮带1221可操作地连接到离合器1223。
在各个实施例中,离合器1223可以是磁粉离合器,其使用磁敏材料来使输入端和输入端机械地联结。在各个实施例中,离合器1223可以在输入端处接收输入旋转力,并且将输入旋转力传递成在输出端处接收的输出旋转力。例如,磁粉离合器1223可以经由布置在其中的铁粉填料机械地传递扭矩。可以通过向粉末施加磁场来控制扭矩,这可以引起形成磁性链接的铁填充链,从而减少离合器1223的输入端与输出端之间的滑移。因此,离合器1223可以经由操纵用于产生磁场的电源电压或电源电流来控制。例如,磁化粒子的一部分可以经由施加由特定电压产生的磁场来配置,并且随着电压增加(例如,磁场增强),磁化粒子的配置可以对力传动装置效率产生更大的阻力。
在至少一个实施例中,联动系统111可以在动力状态下操作,其中马达单元1217经由离合器1223以及本文所述的皮带和联动机构的系统提供部分运动辅助。在另一实施例中,联动系统111可以在无动力状态下操作,其中马达单元1217不提供运动辅助。在各个实施例中,由马达单元1217提供的运动辅助可以经由一个或更多个控制器来配置,这些控制器控制马达单元1217的动力和/或控制离合器1223。在至少一个实施例中,离合器1223可以被配置成对联动系统111的运动操作产生阻力。例如,磁粉离合器1223可以被接合(而不接合马达单元1217),并且其中的磁化粒子可以产生抵抗连接到离合器1223的输出端的驱动连杆1201旋转的阻力(如本文所述)。因为离合器1223的强度可以经由控制提供给它的电力来配置,所以由离合器1223提供的阻力可以经由一个或更多个电子控制器来计量。
在至少一个实施例中,离合器1223的输出端可以可操作地连接到第二皮带1225,并且第二皮带1225可以可操作地连接到驱动连杆齿轮1227。在一个或更多个实施例中,驱动连杆齿轮1227可以可操作地连接到驱动连杆机构1215,该驱动连杆机构1215可操作地连接到驱动连杆1201并且引起驱动连杆1201旋转。因此,马达单元1217处的旋转可以引起驱动连杆1201的旋转,并且驱动连杆1201的旋转可以引起联动系统111的操作。
例如,马达单元1217可以产生旋转力。传动装置1219可以接收和传递旋转力,从而使第一皮带1221旋转。第一皮带1221的旋转可以在磁粉离合器1223的输入端处产生旋转力。磁粉离合器1223可以将旋转力转换成在输出端处接收并引起输出端旋转的第二旋转力(旋转转换的效率由离合器1223内的一部分磁化粒子经受的磁场强度来决定)。磁粉离合器1223的输出端处的旋转可以引起第二皮带1225的旋转。第二皮带1225的旋转可以引起驱动连杆齿轮1227和驱动连杆机构1215的旋转。驱动连杆机构1215的旋转可以引起驱动连杆1215的旋转。
在同一示例中,驱动连杆机构1215的旋转(例如,逆时针方向)可以引起外踏板连杆1203朝向滑架103的远端平移。外踏板连杆1203的平移可以引起踏板1204和内踏板连杆1205朝向滑架103的远端的对应平移。内踏板连杆1205的平移可以引起弯曲连杆1207的旋转(例如,顺时针方向),并且弯曲连杆1207的旋转可以引起第一连接齿轮的旋转(例如,顺时针方向)和第二连接齿轮的旋转(例如,逆时针方向)。第二连接齿轮的旋转可以引起第一连接连杆1209的旋转(例如,逆时针方向),并且第一连接连杆1209的旋转可以引起手柄连杆1211朝向滑架103的近端(例如,朝向受试者115)平移。因为手柄连杆1211可以经由手柄联动机构1214附接到手柄1202,所以手柄连杆1211的平移可以引起手柄1202的对应平移(例如,朝向滑架103的近端)。手柄连杆1211的平移可以经由第二连接连杆1213部分地支撑和促进,该第二连接连杆1213由于手柄连杆1211的平移而旋转。
在至少一个实施例中,上述场景可能由于驱动连杆1201的部分旋转而发生。在各个实施例中,随着驱动连杆1201进行360度旋转,联动系统111可以完成一个完整的步态周期。因此,驱动连杆1201的部分旋转(例如,180度)可以对应于并且引起步态运动,该步态运动是步态周期的子集。在各个实施例中,步态运动可以包括但不限于前进运动和后退运动。在至少一个实施例中,前进运动可以对应于驱动连杆1201的量值为大约180度的旋转,并且后退运动可以对应于量值为大约180度的另外的旋转。
在至少一个实施例中,驱动连杆1201可以使驱动联动机构1233绕特定的旋转半径旋转,并且特定的旋转半径可以确定步幅长度。如本文所述,步幅长度是指踏板1204在前进运动之后和后退运动开始之前行进的距离。在一个或更多个实施例中,旋转半径(例如,并且因此步幅长度)可以经由步幅长度致动器1229增加和/或减少,该步幅长度致动器1229使驱动联动机构1233沿着步幅长度轨道1231平移。例如,步幅长度致动器1229的缩回可以引起连接的驱动联动机构1229朝向旋转中心平移(例如,朝向驱动连杆机构1215)。因为驱动联动机构1229已经移动到更靠近旋转中心,所以(连接的外踏板连杆1203的)旋转半径可以相应地减小,并且经由联动系统111提供的步幅长度可以减小。在至少一个实施例中,步幅长度可以减小,因为外踏板连杆1203、踏板1204和内踏板连杆1205可以由于旋转半径减小而平移较小的量级。在至少一个实施例中,外踏板连杆1203的旋转半径与踏板1204的平移之间的比率量值可以为每平移1.96英寸旋转大约1英寸。换句话说,旋转半径与步幅长度之间的比率量值可以为大约1:1.96。例如,外踏板连杆1203可以表现出大约18.0英寸的旋转半径。因此,连接的踏板1204可以表现出大约35.28英寸的步幅长度。
在一个或更多个实施例中,滑架103可以包括彼此平行定向的两个联动系统111,并且每个联动系统111可以附接到滑架板106。在各个实施例中,一组部件可以布置在滑架板106之间,并且可以连接到这两个联动系统111。在实施例中的至少一个实施例中,该组部件可以定向在滑架板106的外部。例如,该组部件可以在滑架板106的外部侧上靠近该滑架板106定向。在一个或更多个实施例中,该组部件可以包括但不限于:马达单元1217、传动装置1219、齿轮系统1210、第一皮带1221、第二皮带1225和驱动连杆齿轮1227。在至少一个实施例中,两个联动系统111可以以一定的方式彼此旋转偏移,该方式使得第一联动系统111的手柄1202和踏板1204的运动可以与第二联动系统111的手柄1202和踏板1204的往复运动相匹配。例如,第一手柄1202和第一踏板1204的向前平移可以同时伴随着第二手柄1202和第二踏板1204的反向平移。在各个实施例中,第一联动系统和第二联动系统111的偏移和往复运动可以提供完整的双足步态周期。
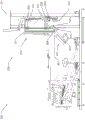
图13是示例性滑架103的侧视图。出于说明和描述的目的,在图13中,滑架103的一个或更多个部分可以被去除,以允许呈现和讨论本文提供的各种内部系统元件。在至少一个实施例中,示例性滑架103可以包括两个连杆系统111。在描述图13-图15时,出于说明和描述的目的,将参考单个联动系统111;然而,应当理解,示例性滑架103可以包括另外的联动系统111,在该另外的联动系统111中,其中运动操作以与本文所述的单个联动系统111的运动操作相反的(reciprocal)方式发生。
在各个实施例中,联动系统111可以包括连接到外踏板连杆1203的驱动连杆1201。在至少一个实施例中,外踏板连杆1203可以连接到踏板1204和内踏板连杆1205。在一个或更多个实施例中,内踏板连杆1205可以连接到弯曲连杆1207,并且弯曲连杆1207可以连接到齿轮系统1210。在各个实施例中,齿轮系统1210可以连接到第一连接连杆1209,该第一连接连杆1209连接到手柄连杆1211。在至少一个实施例中,手柄连杆1211可以连接到第二连接连杆1213,并且也可以连接到手柄1202。
在示例性场景中,如图13所示,联动系统111可以定向在初始位置,在该初始位置,驱动连杆1201定向在第一角位置(例如,0度旋转)。踏板1204、外踏板连杆1203和内踏板连杆1205可以位于踏板最大反向平移点处,并且弯曲连杆1207可以位于弯曲连杆最大逆时针旋转点处。第一连接连杆1209和第二连接连杆1213可以位于连接连杆最大顺时针旋转点处。手柄连杆1211可以位于手柄连杆最大平移点处,并且手柄1202可以位于手柄最大反向平移点处。在示例性场景中,图13可以示出定位在承重反应阶段和/或站立中期阶段(如本文所述)的手柄1202和踏板1204。
图14是示例性滑架103的侧视图,该示例性滑架包括联动系统111。出于说明和描述的目的,在图14中,滑架103的一个或更多个部分可以被去除,以允许呈现和讨论本文提供的各种内部系统元件。在至少一个实施例中,图14可以示出了定向在图13-图15所示的步态周期的下一个点处的图13的示例性滑架103和联动系统111。在各个实施例中,联动系统111可以包括连接到外踏板连杆1203的驱动连杆1201。在至少一个实施例中,外踏板连杆1203可以连接到踏板1204和内踏板连杆1205。在一个或更多个实施例中,内踏板连杆1205可以连接到弯曲连杆1207,并且弯曲连杆1207可以连接到齿轮系统1210。在各个实施例中,齿轮系统1210可以连接到第一连接连杆1209,该第一连接连杆1209连接到手柄连杆1211。在至少一个实施例中,手柄连杆1211可以连接到第二连接连杆1213并且也可以连接到手柄1202。
在示例性场景中,如图14所示,联动系统111可以定向在第二角位置,在该第二角位置,驱动连杆1201从图13所示的初始位置逆时针旋转(例如,大约90度)。踏板1204、外踏板连杆1203和内踏板连杆1205可以从踏板最大反向平移点向前平移,并且弯曲连杆1207可以从弯曲连杆最大逆时针旋转点顺时针旋转。第一连接连杆1209和第二连接连杆1213可以从连接连杆最大顺时针旋转点逆时针旋转。手柄连杆1211可以从手柄连杆最大平移点以弧形方式向后平移,并且手柄1202可以从手柄最大反向平移点以弧形方式向后平移。在示例性场景中,图14可以示出定位在摆动阶段(如本文所述)的手柄1202和踏板1204。
图15是示例性滑架103的侧视图,该示例性滑架包括联动系统111。出于说明和描述的目的,在图15中,滑架103的一个或更多个部分可以被去除,以允许呈现和讨论本文提供的各种内部系统元件。在至少一个实施例中,图15可以示出了定向在图13-图15所示的步态周期的下一个点处的图14的示例性滑架103和联动系统111。在各个实施例中,联动系统111可以包括驱动连杆1201,该驱动连杆1201连接到外踏板连杆1203。在至少一个实施例中,外踏板连杆1203可以连接到踏板1204和内踏板连杆1205。在一个或更多个实施例中,内踏板连杆1205可以连接到弯曲连杆1207,并且弯曲连杆1207可以连接到齿轮系统1210。在各个实施例中,齿轮系统1210可以连接到第一连接连杆1209,该第一连接连杆1209连接到手柄连杆1211。在至少一个实施例中,手柄连杆1211可以连接到第二连接连杆1213,并且也可以连接到手柄1202。
在示例性场景中,如图15所示,联动系统111可以定向在第三角位置,在该第三角位置,驱动连杆1201从图14所示的第二角位置逆时针旋转(例如,大约90度)。踏板1204、外踏板连杆1203和内踏板连杆1205可能已经到达踏板最大平移点,并且可以随后朝着踏板最大反向平移点反向平移返回。弯曲连杆1207可能已经到达弯曲连杆最大顺时针旋转点,并且可以随后朝着弯曲连杆最大逆时针旋转点逆时针旋转返回。第一连接连杆1209和第二连接连杆1213可能已经到达连接连杆最大顺时针旋转点,并且可以随后朝着连接连杆最大逆时针旋转点逆时针旋转返回。手柄连杆1211可能已经到达手柄连杆最大反向平移点(例如,所遵循的弧线的末端),并且可以随后以弧形方式朝向手柄连杆最大平移点(例如,朝向所遵循的弧线的相对端)向前平移。手柄1202可能已经到达手柄最大平移点,并且可以随后朝向手柄最大反向平移点反向平移返回。在示例性场景中,图15可以示出在首次触地阶段之后和承重反应阶段(如本文所述)时定位的手柄1202和踏板1204。
如本领域普通技术人员将理解的那样,图16中所示的步骤和过程(以及本文示出和描述的所有其他流程图和序列图的步骤和过程)可以同时且连续地操作,总体上是不同步且独立的,并且不一定按所示的顺序执行。
图16是示出了根据本公开的一个实施例的示例性训练过程1600的流程图。在步骤1602,训练过程1600包括接收初始化命令。初始化命令可以从输入设备、从电子设备被接收,或者可以自动生成(例如,响应于来自一个或更多个传感器的记录)。作为示例,系统可以经由输入设备从受试者接收“开始训练”选择。作为另一示例,系统可以从受试者和/或训练者的智能电话接收初始化命令。在另一示例中,系统可以包括一个或更多个接近传感器,该接近传感器检测受试者何时接近或定位和/或将他们自身定位在系统内。一个或更多个接近传感器可以检测受试者的接近,并且响应于该检测来引起系统生成和/或检索初始化命令。
在各个实施例中,初始化命令可以包括但不限于:1)构型信息,其包括受试者希望以站立构型还是以就座构型进行训练;2)构型参数,其包括但不限于:A)一个或更多个座椅倾斜参数;B)一个或更多个座椅高度参数;C)一个或更多个步幅长度;和D)一个或更多个附加参数(例如,步态宽度);3)课程模式信息,其包括但不限于:A)受试者希望以手动课程还是电动课程进行训练;B)一个或更多个阻力水平;C)一个或更多个课程阻力时间表;D)一个或更多个辅助水平;和E)一个或更多个课程辅助时间表;4)体重支撑(BWS)信息,其包括但不限于:A)一个或更多个偏移百分比;和B)一个或更多个课程偏移时间表(如本文所述);5)课程信息,其包括课程持续时间参数;和6)受试者标识符(如本文所述)。
在步骤1602,训练过程1600可以包括处理接收到的初始化命令,以解析和提取其中的信息。
在步骤1604,训练过程1600包括确定配置模式。在至少一个实施例中,可以在包括在步骤1602时接收到的初始化命令中的配置信息中指定配置模式。例如,初始化命令可以包括就座对站立阈值,并且初始化命令可以包括被配置为指定就座配置模式的就座对站立阈值。在一个或更多个实施例中,系统可以通过处理配置选择(例如,经由输入设备、网络通信、电子设备等接收的)来确定配置模式。例如,系统可以包括“就座”按钮和“站立”按钮(每个都位于输入设备上)。系统可以接收和处理受试者对“就座”按钮的选择,并且从而确定就座配置模式。
在确定配置模式之后,训练过程1600包括执行坐下-站立配置过程1700(图17)。
在完成坐下-站立配置过程1700之后,训练过程1600包括执行安全分析过程1800(图18)。
在步骤1606,训练过程1600包括基于安全分析过程1800确定是否满足一个或更多个安全阈值。在至少一个实施例中,一个或更多个安全阈值可以包括但不限于:1)安全接触器阈值;2)座椅枢转阈值;3)系带安全阈值;4)BWS阈值;和5)一个或更多个附加阈值。在一个或更多个实施例中,如果系统确定满足一个或更多个安全阈值中的每一个,则系统前进到步骤1608。在各个实施例中,如果系统确定不满足一个或更多个安全阈值中的任何一个,则训练过程1600暂停。
在至少一个实施例中,如果系统确定不满足一个或更多个安全阈值中的任何一个,则系统可以采取一个或更多个补充动作。一个或更多个补充动作可以包括但不限于:1)生成并传输包括被确定为未满足的一个或更多个安全阈值的警报;2)发出警报;3)用包括一个或更多个未满足的安全阈值的通知和/或用于检查一个或更多个安全传感器的指令来更新用户界面。
在步骤1608,训练过程1600包括确定训练模式。在至少一个实施例中,训练模式可以包括但不限于手动模式或电动模式。系统可以通过接收训练模式选择和/或通过处理被包括在接收到的初始化命令中的课程模式信息来确定训练模式。例如,系统可以处理课程模式信息,并且确定课程信息包括“手动”训练模式选择。作为另一示例,系统可以包括“手动”按钮和“电动”按钮(每个都位于输入设备上)。系统可以接收和处理受试者对“电动”按钮的选择,并且因此确定电动训练模式。在至少一个实施例中,如果系统确定手动训练模式,则系统执行手动训练过程1900。在一个或更多个实施例中,如果系统确定电动训练模式,则系统执行电动过程2000。
在步骤1610,在手动训练过程1900和/或电动过程2000执行之后,系统确定受试者是否希望继续训练。在至少一个实施例中,如果系统确定受试者希望继续训练,则系统返回到步骤1602,从而重新开始训练过程1600。在一个或更多个实施例中,如果系统确定受试者不希望继续训练,则系统暂停训练过程1600。例如,系统可以包括“继续训练”按钮和“不继续训练”按钮(例如,每个按钮都被包括在可操作地连接的输入设备上)。系统可以接收和处理受试者对“继续训练”按钮的选择,并且可以返回到步骤1602(例如,接收和处理后续的初始化命令)。
图17是示出了根据本公开的一个实施例的示例性配置过程1700的流程图。在步骤1702,配置过程1700包括接收配置命令。在至少一个实施例中,配置命令可以包括但不限于被包括在接收到的初始化命令中的配置信息和/或一个或更多个配置参数。在一个或更多个实施例中,系统可以使用处理后的配置信息和/或配置参数来生成配置命令。在各个实施例中,配置命令可以指定受试者希望以就座模式还是站立模式来执行训练。
在步骤1704,配置过程1700包括确定在执行后续过程步骤时是否使用存储的参数。在至少一个实施例中,系统可以通过从输入设备接收选择来表达确定。例如,系统可以包括“使用存储的设置”按钮和“手动配置”按钮。系统可以接收和处理受试者对“使用存储的设置”按钮的选择,并且确定受试者在系统执行配置过程1700的后续步骤时希望使用存储的参数。可替代地,系统可以接收和处理受试者对“手动配置”按钮的选择,并且确定受试者不希望使用存储的参数。在一个或更多个实施例中,如果系统确定要使用存储的参数,则系统前进到步骤1706。在各个实施例中,如果系统确定要使用存储的参数,则系统可以自动地加载和/或配置存储的参数、受试者标识符、一个或更多个存储的课程程序、连接的账户、传感器配置以及其他存储的信息。在至少一个实施例中,如果系统确定不使用存储的参数,则系统前进到步骤1708。
在步骤1706,系统检索并处理座椅配置参数。在至少一个实施例中,座椅配置参数可以从一个或更多个数据库和/或其他计算机存储器中检索。在至少一个实施例中,在步骤1702接收到的配置命令可以包括在数据库或诸如此类中与一组座椅配置参数相关联的受试者标识符。例如,可以从接收到的配置命令中解析受试者标识符,并且受试者标识符可以用于索引数据库和检索与受试者标识符相关联的座椅配置参数。
在步骤1708,系统接收并且处理一个或更多个配置输入。示例性配置输入可包括但不限于:座椅配置模式、座椅高度、座椅旋转和座椅平移。在一个或更多个实施例中,一个或更多个配置输入可以经由连接到系统的一个或更多个输入设备来接收。例如,系统可以包括显示器和一个或更多个按钮,并且在步骤1708,系统可以呈现图形用户界面(GUI)。系统可以经由GUI接收一个或更多个按钮、各种配置参数的配置输入。配置参数可以包括但不限于:座椅高度、BWS偏移和步幅长度。在一个或更多个实施例中,系统可以处理接收到的配置输入,以生成并且记录一个或更多个配置参数。在至少一个实施例中,系统可以向配置控制器(例如,计算环境)提供一个或更多个配置参数,该配置控制器将一个或更多个配置参数转译成可以发送给一个或更多个系统部件(例如,致动器等)的电子命令,以产生期望的配置。
在步骤1710,系统基于(在步骤1706或步骤1708获得的)处理后的配置参数确定是否调整座椅高度。在一个或更多个实施例中,可以执行高度调节以适应受试者的尺寸和/或解剖结构。在至少一个实施例中,系统可以被配置用于身高大约4.5英尺-6.5英尺的受试者。在各个实施例中,系统可以确定处理后的配置参数是否包括座椅高度参数。在至少一个实施例中,系统可以基于在呈现GUI的显示器上对座椅高度参数字段的选择来做出确定。例如,如果系统接收到座椅高度参数字段中的任何输入,则系统可以确定要执行座椅高度调节。在各个实施例中,在确定要执行座椅高度调节时,系统也可以确定要执行的座椅高度调节包括高度增加还是高度减小。在至少一个实施例中,系统可以存储座椅系统的当前高度(例如,来自被配置在座椅高度致动器中的霍尔传感器)。在一个或更多个实施例中,系统可以将存储的当前高度与座椅高度参数进行比较。在各个实施例中,如果座椅高度参数大于存储的当前高度,则系统前进到步骤1712。在一个或更多个实施例中,如果座椅高度参数小于存储的当前高度,则系统前进到步骤1714。在至少一个实施例中,如果存储的当前高度和座椅高度参数的和或差超过最大高度阈值和/或低于最小高度阈值,则系统可以生成警报。在一个或更多个实施例中,如果存储的当前高度等于座椅高度参数,或者如果座椅高度参数没有被输入到系统中或没有被检索到,则系统可以暂停配置过程1700。
在步骤1712,系统处理接收到的座椅高度参数,确定座椅高度致动器参数,并且根据确定的座椅高度致动器参数来命令座椅高度致动器启动。在一个或更多个实施例中,系统可以通过计算座椅高度解来确定座椅高度致动参数,该座椅高度解包括但不限于达到座椅高度参数所需的致动器启动持续时间(例如,当前座椅高度和/或座椅高度致动器位置也考虑在内)。在至少一个实施例中,系统生成包括座椅高度解的座椅高度致动器命令并将其传输到座椅高度致动器,该座椅高度致动器处理该命令并且启动持续计算出的持续时间和/或将座椅高度臂升高到计算出的高度,从而升高与其连接的座椅系统的高度(例如,也升高连接到座椅系统的BWS系统的高度)。在至少一个实施例中,系统可以在不调节座椅高度的情况下执行座椅系统配置过程。例如,系统可以在不调节座椅高度的情况下将座椅系统从就座构型配置成站立构型(并且反之亦然)。
在步骤1714,系统处理接收到的座椅高度参数,确定座椅高度致动器参数,并且根据确定的座椅高度致动器参数来命令座椅高度致动器启动。在一个或更多个实施例中,系统可以通过计算座椅高度解来确定座椅高度致动参数,该座椅高度解包括但不限于获得座椅高度参数所需的致动器启动持续时间(例如,当前座椅高度和/或座椅高度致动器位置也考虑在内)。在至少一个实施例中,系统生成包括座椅高度解的座椅高度致动器命令并将其传输到座椅高度致动器,该座椅高度致动器处理该命令并且启动持续计算出的持续时间和/或将座椅高度臂降低到计算出的高度,从而减小与其连接的座椅系统的高度(例如,也减小连接到座椅系统的BWS系统的高度)。
在步骤1716,系统确定是否需要坐下-站立调节。在至少一个实施例中,系统接收配置模式。例如,系统可以接收或检索在步骤1604确定的配置模式。在各个实施例中,系统也可以检索存储的当前配置模式,该储的当前配置模式描述了系统的当前配置(例如,就座构型或站立构型)。在一个或更多个实施例中,系统将接收到的配置模式与存储的配置模式进行比较,并且如果模式匹配,则系统前进到步骤1722。在至少一个实施例中,如果存储的配置是“站立”而接收到的配置模式是“就座”,则系统前进到步骤1718。在各个实施例中,如果存储的配置是“就座”而接收到的配置模式是“站立”,则系统前进到步骤1720。
在步骤1718,系统生成命令并将该命令传输到坐下-站立致动器。在至少一个实施例中,坐下-站立致动器在接收到命令后启动并且伸展到完全伸展的位置。在一个或更多个实施例中,如本文所述,坐下-站立致动器的完全伸展可以引起座椅靠背组件从系统(例如,从其塔柱)向外突出,并且可以引起座椅底部组件顺时针旋转,直到定位成与座椅靠背组件正交。在至少一个实施例中,系统可以命令坐下-站立致动器执行部分伸展。例如,基于受试者的高度或其他尺寸,系统可以命令坐下-站立致动器部分地伸展,从而使座椅靠背组件部分地平移并且使座椅底部组件部分地顺时针旋转。
在步骤1720,系统生成命令并将该命令传输到坐下-站立致动器。在至少一个实施例中,坐下-站立致动器在接收到命令后启动并缩回至完全缩回位置。在一个或更多个实施例中,如本文所述,坐下-站立致动器的完全缩回可以引起座椅靠背组件朝向系统(例如,朝向其塔柱)向内收回,并且可以引起座椅底部组件逆时针旋转,直到定位成与座椅靠背组件成钝角。在至少一个实施例中,系统可以命令坐下-站立致动器执行部分缩回。例如,基于受试者的高度或其他尺寸,系统可以命令坐下-站立致动器部分地伸展,从而使座椅靠背组件部分地平移(例如,在与在步骤1718执行的平移相反的方向上),并且使座椅底部组件部分地逆时针旋转。
在步骤1720之后,系统可以前进到步骤1722。
在步骤1722,系统确定是否要执行体重支撑系统(BWS)的启动。在至少一个实施例中,系统可以基于处理一个或更多个配置参数和/或通过在呈现的GUI上接收BWS选择来表达该确定。如果系统确定要接合BWS系统,则系统执行BWS配置过程2100(图21)。如果系统确定不需要BWS系统,则系统结束配置过程1700。在至少一个实施例中,系统可以以站立构型或就座构型(例如,或其间的部分构型)来执行BWS配置过程2100。
图18是示出了根据本公开的一个实施例的示例性安全过程1800的流程图。在步骤1802,安全过程1800包括评估一个或更多个紧急停止装置的配置。在至少一个实施例中,紧急停止装置是指一种系统(如,诸如,例如,安全继电器电路),其在被触发(例如,断开或连接)时引起紧急停机,紧急停机包括但不限于:暂停所有电动辅助过程、应用一个或更多个紧急制动器(例如,停止一个或更多个机械部件的运动)、以及执行一个或更多个停机程序(如本文所述)。在各个实施例中,紧急停止装置可以包括但不限于一个或更多个安全接触器。
在至少一个实施例中,确定配置了紧急停止装置可以包括但不限于确定一个或更多个安全接触器是否已经正确定位(例如,在受试者上、在一个或更多个系统部件上、等等)。例如,系统可以包括安全接触器,当该安全接触器附接到受试者时,该安全接触器使紧急停止电路完整。为了确定紧急停止电路是否正确配置,系统可以确定紧急停止电路是否完整(例如,通过将测试信号发送通过电路和/或对电路的电压、电流、电阻等进行采样)。在各个实施例中,如果系统确定出配置了紧急停止装置,则系统前进到步骤1806(例如,跳过步骤1804)。在一个或更多个实施例中,如果系统确定出未配置紧急停止装置,则系统可以前进到步骤1804。
在步骤1804,系统可以生成并传输警报。在一个或更多个实施例中,警报可以包括但不限于:1)电子通知(例如,推送警报、文本、电子邮件等);2)在连接到系统的显示器上呈现的显示警报;3)可听音和/或语音录音;和4)系统操作员和/或受试者可以感觉到的振动警报。在至少一个实施例中,警报可以包括警报原因的描述(例如,未配置紧急停止装置,传感器状态异常,不满足传感器-阈值对、等等)。在各个实施例中,在传输警报之后,系统可以重启安全过程1800。
在步骤1806,系统确认紧急停止阈值。在一个或更多个实施例中,在确认紧急停止阈值之前,系统可以被配置成防止系统元件(例如,踏板、手柄、马达等)的操作。例如,系统可以包括锁定系统,该锁定系统防止系统元件的操作,除非确认了紧急停止阈值。在至少一个实施例中,可以在每个训练过程1600之后和/或在每个配置过程1700之后重置紧急停止阈值。
在步骤1808,系统评估一个或更多个系统传感器的状态。在至少一个实施例中,一个或更多个系统传感器可以包括但不限于:霍尔传感器、感应传感器、红外对准传感器、重量传感器以及将物理现象转换成电信号和/或测量系统元件的位置和方位的一个或更多个附加传感器。在各个实施例中,系统可以检索一个或更多个传感器阈值。例如,系统可以检索与各种系统元件的对准和功能相关的阈值集合。
在示例性场景中,系统检索用于可旋转塔柱和基座的旋转对准的阈值。系统可以从感应传感器检索数据,该感应传感器记录塔柱与基座之间的旋转角度。系统可以评估数据并且确定塔柱与基座之间的当前旋转角度为0度。检索到的阈值可以将0度的旋转指定为满足阈值。因此,系统可以将评估的0度旋转角度与检索到的阈值进行比较,并且可以确定满足阈值。
在一个或更多个实施例中,系统可以包括传感器和传感器阈值的集合,对于一个或更多个安全阈值的确认,必须满足该集合。例如,传感器和传感器阈值的集合可以包括上述感应传感器和塔柱旋转阈值。传感器和传感器阈值的集合还可以包括但不限于:1)座椅枢转传感器和座椅枢转阈值;2)系带安全传感器和系带安全阈值;和3)BWS传感器和BWS阈值。座椅枢转传感器可以确定座椅底部组件的旋转位置,并且座椅枢转阈值可以通过约0度-120度之间的旋转来满足。系带安全传感器可以确定安全系带是否正确地附接到受试者,安全系带阈值可以通过确认正确的安全系带附接来满足。BWS传感器可以确定BWS系统是否正常运行,并且BWS阈值可以通过确认正确的BWS系统功能来满足。例如,BWS传感器可以是力传感器,该力传感器记录弹簧与弹簧锚定件之间的张紧力。BWS阈值可以是可接受的基准力的范围(例如,基准是指没有受试者的BWS系统)。在同一示例中,如果BWS传感器报告力在可接受的基准力范围内,则可以满足BWS阈值。
在至少一个实施例中,系统评估被包括在传感器和阈值的集合中的每个传感器和传感器阈值。在各个实施例中,对于每个传感器-阈值对或诸如此类,系统可以更新该集合,以包括指示符合阈值的“通过(PASS)”参数或指示不满足阈值的“失败(FAIL)”参数。
在步骤1810,系统确定是否有任何传感器未满足阈值。在各个实施例中,为了表达确定,系统可以处理在步骤1810生成的传感器评估(例如,格式化为传感器和阈值的集合),并且确定是否有任何传感器未满足相关联的阈值。在示例性场景中,系统可以处理更新的传感器的集合并且索引包括“失败”参数的所有传感器-阈值对。如果返回的索引为空集,则系统确定所有传感器均通过评估,并且系统前进到步骤1812。如果一个或更多个实施例,如果返回的索引非空集(例如,包括至少一个传感器-阈值对),则系统前进到步骤1804。
在步骤1812,系统确认一个或更多个安全阈值。在一个或更多个实施例中,系统可以包括在步骤1808评估的每个传感器的安全阈值。在至少一个实施例中,系统可以处理更新的传感器和阈值的集合(例如,包括“通过”参数的所有传感器-阈值对),以确认一个或更多个安全阈值。在各个实施例中,在确认一个或更多个安全阈值后,系统可以接纳受试者。
图19是示出了示例性手动训练过程1900的流程图。在步骤1902,系统确定受试者是否希望开始训练课程。在一个或更多个实施例中,系统可以接收使系统开始训练课程的课程初始化命令。例如,系统可以经由在呈现的GUI上做出的选择来接收课程初始化命令。在至少一个实施例中,课程初始化命令可以包括课程持续时间、阻力参数和一个或更多个其他训练参数。在一个或更多个实施例中,如果系统确定受试者希望开始训练课程,则系统前进到步骤1904。在一个或更多个实施例中,如果系统确定受试者不希望开始训练课程,则系统暂停手动训练过程1900。
在步骤1904,系统确定期望的阻力水平并且配置离合器以实现期望的阻力水平。在一个或更多个实施例中,系统可以从在步骤1902接收到的课程初始化命令中检索期望的阻力水平。在至少一个实施例中,系统可以在连接的显示器上呈现GUI,该GUI包含用于输入阻力水平的字段。在各个实施例中,系统可以经由被包括在GUI中的阻力水平字段中做出的选择和/或信息来接收阻力水平。在一个或更多个实施例中,系统可以处理受试者标识符以检索存储的阻力水平。
在至少一个实施例中,系统处理阻力水平并且启动离合器。在一个或更多个实施例中,阻力命令可以引起离合器(如本文所述)进入启动状态并且生成等于处理后的阻力水平的阻力。在示例性场景下,离合器是磁粉离合器,并且阻力命令可以引起磁粉离合器生成特定强度的磁场。系统可以通过将期望的阻力水平转变成磁场强度(例如,经由一次或更多次计算)来确定磁场的特定强度。系统可以通过基于特定强度来计算(在磁粉离合器处)生成特定强度的磁场所需的电(例如,电压,电流等)的量级,来引起磁粉离合器生成特定强度。在各个实施例中,系统可以通过向磁粉离合器供应(或引起附加系统供应)计算出的电的量级来配置磁粉离合器。从本文的讨论中将会理解,阻力水平可以被设置为零(例如,或非常低的阻力)。
在步骤1906,系统执行训练课程并且记录整个训练课程中的课程数据。在至少一个实施例中,训练课程可以在检测到一个或更多个踏板、一个或更多个手柄的运动后和/或在检测到联动机构和/或联动部件(例如,如本文所述)的旋转时自动执行。例如,定向在系统中的受试者可以使踏板移动,并且系统在检测到踏板运动后可以自动地执行训练课程并且开始记录课程数据。在各个实施例中,记录的课程数据可以包括但不限于:1)训练持续时间;2)步数度量;3)步进速率度量;4)识别和/或描述最高步进速率、步数等的峰值时段度量;5)一个或更多个附加训练度量。
在至少一个实施例中,在整个训练课程中,系统可以继续监控和评估一个或更多个传感器(例如,如本文所述)的状态。例如,系统可以连续监控紧急停止装置,以确认正确配置,并且如果系统确定紧急停止装置未正确地配置,则可以暂停训练课程。在各个实施例中,系统可以包括一个或更多个开关和/或可跳闸式传感器(trip-able sensors),这些开关和/或可跳闸式传感器仅响应于系统故障而启动和/或跳闸。例如,BWS系统107可以包括用于检测头顶支架205、中央支架206或一个或更多个连接的部件的不恰当旋转的开关传感器。在示例性场景中,如果头顶支架205和/或中央支架206被旋转和/或枢转至竖直位置(例如,由于部件故障、重量过载等而可能发生),则可以启动开关。在启动开关后,系统可以触发紧急停机,紧急停机包括但不限于:断开和/或关闭马达单元的电源,并且应用一个或更多个制动器等,以停止联动运动。
在步骤1908,系统确定受试者是否希望继续进行训练课程。在一个或更多个实施例中,系统可以在经过预定义的或受试者定义的训练课程时段之后前进到步骤1908。在至少一个实施例中,系统可在检测到联动机构(如本文所述)已经停止所有平移运动和/或旋转运动(例如,如由分布在其中的位置传感器和/或旋转传感器所指示的)后前进到步骤1908。
在各个实施例中,系统可以通过呈现GUI来表达确定,该GUI包括用于选择继续或暂停训练课程的字段(例如,“是”字段和“否”字段)。在至少一个实施例中,系统可以接收并且处理字段选择,以确定受试者是否期望暂停课程(例如,指示训练课程继续的“是”选择和指示训练课程暂停的“否”选择)。在一个或更多个实施例中,如果系统确定受试者希望继续进行训练课程,则系统执行安全分析过程1800并返回到步骤1902。
在至少一个实施例中,如果系统确定受试者不希望继续进行训练课程,则系统暂停手动训练过程1900。
图20是示出了示例性电动训练过程2000的流程图。在步骤2002,确定受试者是否希望开始训练课程。在一个或更多个实施例中,系统可以接收使系统开始训练课程的课程初始化命令。例如,系统可以经由在呈现的GUI上做出的选择来接收课程初始化命令。在至少一个实施例中,课程初始化命令可以包括课程持续时间、阻力参数和一个或更多个其他训练参数。在一个或更多个实施例中,如果系统确定受试者希望开始训练课程,则系统前进到步骤2004。在一个或更多个实施例中,如果系统确定受试者不希望开始训练课程,则系统暂停手动训练过程2000。
在步骤2004,系统确定期望的辅助水平并且将马达单元和离合器配置成达到期望的辅助水平。在一个或更多个实施例中,系统可以从在步骤2002接收的课程初始化命令中检索期望的辅助水平。在至少一个实施例中,系统可以在连接的显示器上呈现GUI,该GUI包含用于输入辅助水平的字段。在各个实施例中,系统可以经由被包含在GUI中的辅助水平字段中做出的选择和/或信息来接收辅助水平。在一个或更多个实施例中,系统可以处理受试者标识符,以检索存储的辅助水平。
在至少一个实施例中,系统处理辅助水平并且启动马达单元和离合器。在一个或更多个实施例中,系统可以启动接合马达单元的输出端和/或随后连接的元件(例如,传动装置)的机构,从而引起马达单元向驱动连杆机构提供动力并且使一个或更多个驱动连杆旋转(例如,由此启动一个或更多个联动机构,如本文所述)。在至少一个实施例中,马达单元可以提供固定的动力输出(例如,辅助),并且离合器可以被配置为降低输出动力,以获得期望的辅助水平。在一个或更多个实施例中,系统可以引起离合器(如本文所述)进入启动状态并且产生与已处理的辅助水平相等的辅助。在示例性场景中,离合器是磁粉离合器,并且系统可以使磁粉离合器生成特定强度的磁场。该系统可以通过将期望的辅助水平转变成磁场强度(例如,经由一次或更多次计算)来确定磁场的特定强度。系统可以通过基于特定强度计算(例如,在磁粉离合器处)生成特定强度的磁场所需的电(例如,电压、电流等)的量级,来使磁粉离合器生成特定强度。在各个实施例中,系统可以通过向磁粉离合器供应(或引起附加系统供应)计算出的电的量级来配置磁粉离合器。
在步骤2006,系统执行训练课程并且在整个训练课程中记录课程数据。在至少一个实施例中,训练课程可以在检测到一个或更多个踏板、一个或更多个手柄的运动后和/或在检测到联动机构和/或联动部件(例如,如本文所述)的旋转后自动地执行。在至少一个实施例中,在步骤2004,系统可以在接合马达单元和离合器之前等待运动检测。例如,定向在系统中的受试者可以使踏板运动,并且系统在检测到踏板运动后可以自动地接合马达单元和离合器,从而为受试者提供电动辅助。在各个实施例中,记录的课程数据可以包括但不限于:1)训练持续时间;2)步数度量;3)步进速率度量;4)识别和/或描述最高步进速率、步数等的峰值时段度量;5)一个或更多个附加的训练度量。
在步骤2008,系统确定受试者是否希望继续进行训练课程。在一个或更多个实施例中,系统可以在经过预定义的或受试者定义的训练课程时段之后前进到步骤2008。在至少一个实施例中,系统可以在检测到联动机构(如本文所述)已经停止所有平移运动和/或旋转运动(例如,如由分布在其中的位置传感器和/或旋转传感器所指示的)后前进到步骤2008。
在各个实施例中,系统可以通过呈现GUI来表达确定,该GUI包括用于选择继续或暂停训练课程的字段(例如,“是”字段和“否”字段)。在至少一个实施例中,系统可以接收并且处理字段选择,以确定受试者是否期望暂停课程(例如,指示训练课程继续的“是”选择和指示训练课程暂停的“否”选择)。在一个或更多个实施例中,如果系统确定受试者希望继续进行训练课程,则系统执行安全分析过程1800并返回到步骤2002。
在至少一个实施例中,如果系统确定受试者不希望继续进行训练课程,则系统暂停电动训练过程2000。
图21是示出了示例性BWS配置过程2100的流程图。在各个实施例中,体重支撑过程可以包括BWS系统107(如本文所述)的操作。
在步骤2102,系统可以接收偏移命令。在一个或更多个实施例中,在确定(例如,在配置过程1700期间表达的)受试者使用BWS系统之后,可以接收到偏移命令。在至少一个实施例中,偏移命令可以包括但不限于受试者体重和偏移百分比(例如,介于0%-100%之间)。在各个实施例中,偏移百分比是指经由BWS系统减轻的受试者体重的负载的比例。例如,偏移命令可以包括200磅的受试者体重和50%的偏移百分比,从而指示受试者希望经由BWS系统减轻100磅的负载。在至少一个实施例中,系统可以通过以下方式接收偏移命令:1)在所连接的显示器上呈现GUI,该GUI包括受试者体重字段和减轻负载百分比字段;和2)接收和处理每个字段的输入。在一个或更多个实施例中,系统可以处理受试者标识符并且从数据库或诸如此类中检索存储的偏移命令(或其中包括的信息)。
在步骤2104,系统从BWS系统收集传感器数据。在各个实施例中,系统可以从传感器收集传感器数据,这些传感器包括但不限于配置在BWS系统内的位置传感器和/或力传感器。例如,系统可以从传感器收集力数据,这些传感器测量弹簧与弹簧锚定件之间、弹簧锚定件与力传递梁之间、和/或系带或条带系统与头顶支架之间的力。作为另一示例,系统可以从传感器收集位置数据,这些传感器测量弹簧的拉伸长度和/或测量弹簧致动器杆的位置。作为附加示例,系统可以从布置在位于BWS系统下方的轨道的一部分中的一个或更多个重量传感器收集重量数据。由于受试者可能位于轨道部分上方,因此一个或更多个体重传感器可以测量并且记录受试者的重量。
在步骤2106,系统确定一个或更多个致动参数。在各个实施例中,致动参数可包括确定偏移量、弹簧拉伸距离和弹簧致动器解。在至少一个实施例中,偏移量是指通过将受试者体重乘以偏移百分比而计算出的度量。例如,系统可以针对重200磅和期望的偏移百分比为50%的受试者进行计算,因此偏移量等于100磅。在一个或更多个实施例中,弹簧拉伸是指弹簧必须拉伸以生成等于计算出的偏移量的减负力的长度。在各个实施例中,系统可以通过求解方程式1来计算弹簧拉伸,其中k表示弹簧常数,F表示偏移量,并且x表示弹簧拉伸量。
F=-k*x (方程式1)
例如,受试者可能需要100磅的偏移量,并且弹簧可能呈现85磅/英寸(lbs/in)的弹簧常数。系统可以解出方程式1的x并且计算出大约1.18英寸的弹簧拉伸量,从而指示弹簧必须至少拉伸大约1.18英寸以生成足以提供受试者所需偏移量的减负力。因为可以经由附接的弹簧致动器杆来促进弹簧拉伸,所以偏移量也可以指弹簧致动器和弹簧致动器杆实现偏移所需的收缩距离或伸展距离。在以上示例中,1.18英寸偏移量还可以描述了弹簧致动器杆必须缩回以引起弹簧生成100磅偏移量的距离。
在各个实施例中,系统可以存储一个或更多个弹簧常数(例如,出于计算弹簧偏移量的目的)。在各个实施例中,BWS系统内的弹簧的构型可以固有地包括弹簧的部分拉伸,从而生成基准减负力。在至少一个实施例中,在解方程式1之前,系统可以通过减去由弹簧当前生成的基准偏移力来调节“F”。为了继续以上示例,系统在解方程式1之前可以检索到15磅的基准偏移力(例如,经由一个或更多个传感器记录的,如本文所述)。系统可以从100磅的偏移量中减去15磅偏移力,以生成85磅的经调节的偏移量。然后,系统可以使用调节后的偏移量来解方程式1,并且可以计算出约1.0英寸的弹簧拉伸量。
在一个或更多个实施例中,系统可以使用查找表或诸如此类来确定一个或更多个致动器参数(例如,与一个或更多个方程式相对或除此之外)。例如,系统可以包括存储在本地存储器或远程(例如,云)存储器中的表,该表包括系统或与受试者输入(例如,受试者体重)匹配的一个或更多个致动器参数(例如,弹簧拉伸量)。继续该示例,在接收到受试者输入后,系统使用查找表来确定对应的系统或者一个或更多个致动器参数(例如,弹簧拉伸量或其他参数)。
在至少一个实施例中,系统确定弹簧致动器解,该弹簧致动器解可以包括弹簧致动器杆位置和/或弹簧致动器启动持续时间。在各个实施例中,弹簧致动器解可以部分地基于计算出的弹簧拉伸量和描述弹簧致动器的当前定向的传感器数据。为了继续以上示例,系统可以确定弹簧致动器杆伸展到大约6英寸的长度。系统可以从6英寸当前位置减去计算出的1英寸弹簧拉伸量,以确定5英寸的拉伸位置。在各个实施例中,系统可以通过求解存储的致动位置方程式(例如,使用计算出的拉伸量作为输入)来计算弹簧致动器启动持续时间。为了继续以上示例,系统可以检索致动常数,该致动常数描述在给定的时间长度(例如1秒)内产生的致动伸展或缩回的量级。检索到的致动常数可以是每英寸约1.3秒。系统可以通过将计算出的1英寸拉伸量乘以1.3秒/英寸致动常数来计算弹簧致动器启动持续时间,从而输出1.3秒的弹簧致动器启动持续时间。在至少一个实施例中,弹簧致动器可以被配置成在接收到计算出的拉伸量(例如,被包括在由系统传输到弹簧致动器的弹簧致动器解中)后自动地计算弹簧致动器解。在至少一个实施例中,因为系统可以存储关于弹簧和弹簧致动器的位置和其他参数的数据,所以系统可以在不进行计算(例如,基于历史参数)的情况下计算弹簧拉伸量解。
在一些实施例中,系统可以基于致动器杆的已知长度来计算致动器杆运动。在这些实施例(和其他实施例)中,系统可以使致动器杆运动,以对应于计算出的弹簧拉伸量。
在步骤2108,系统确定在步骤2106计算出的拉伸量是否可实现。在各个实施例中,如果拉伸量级大于最大弹簧致动器伸展距离或大于最小弹簧致动收缩距离,则拉伸可能是无法实现的。在各个实施例中,系统可以检索:1)最大收缩距离(与弹簧致动器和弹簧致动器杆相关联),该最大收缩距离描述了弹簧致动器杆可以收缩的最大长度(例如,从当前位置和/或静止位置);和2)最大伸展距离,该最大伸展距离描述了弹簧致动器杆可以伸展到的最大长度(例如,从初始位置或当前位置)。在一个或更多个实施例中,如果系统确定计算出的拉伸量大于最大收缩距离和/或大于最大伸展距离,则系统可以确定拉伸量无法实现并且暂停BWS配置过程2100。在至少一个实施例中,如果系统确定计算出的拉伸量小于最大收缩距离和/或小于最大伸展距离,则系统确定拉伸量是可实现的并前进到步骤2110。
在示例性场景下,在步骤2106,系统可以计算出6.0英寸的拉伸量,从而指示弹簧致动器必须将弹簧致动器杆缩回6.0英寸的长度,以生成足够的偏移力。在上述场景下,系统可以将检索到的5英寸最大收缩距离与计算出的6.0英寸拉伸量进行比较。因为所需的拉伸量大于最大收缩距离,所以系统可以确定该拉伸量是无法实现的。在至少一个实施例中,如果系统确定拉伸量不能实现,则系统可以暂停BWS配置过程2100。在至少一个实施例中,如果系统确定拉伸量不能实现,则系统还可以生成并且转译警报(如本文所述),从而通知受试者和/或操作者不能实现所需的偏移量。
在步骤2110,系统通过启动弹簧致动器来执行BWS致动。在至少一个实施例中,系统可以生成包括在步骤2106确定的拉伸量的命令并将该命令传输到弹簧致动器。在一个或更多个实施例中,该命令可以引起弹簧致动器伸展,或者引起弹簧致动器杆缩回等于传输的拉伸量的量级。在各个实施例中,弹簧致动器杆的伸展或缩回可以引起弹簧的对应缩回或伸展,从而经由传递到连接至BWS系统(如本文所述)的受试者的张紧力提供计算出的偏移量。
图22是示出了示例性步幅长度配置过程2200的流程图。在各个实施例中,可以执行步幅长度配置过程2200,以调节经由本系统提供给受试者的步幅长度。在至少一个实施例中,由于受试者尺寸和步态周期的变化,可能需要调整步幅长度。在一个或更多个实施例中,可以经由沿着步幅长度轨道定位驱动联动机构来实现步幅长度配置(例如,经由启动步幅长度致动器来促进)。由于步幅长度可以由外踏板连杆的旋转半径确定,因此减小外踏板连杆的旋转半径可以减小步幅长度,而增加外踏板连杆的旋转半径可以增大步幅长度。
在步骤2202,系统接收包括期望的步幅长度的步幅长度命令。在至少一个实施例中,系统可以通过以下方式接收步幅长度命令:1)在连接的显示器上呈现GUI,该GUI包括步幅长度字段;和2)接收和处理字段的输入。在各个实施例中,GUI可以包括选择器和/或滑块界面,选择器和/或滑块界面允许受试者或操作者迭代地和增量地调节步幅长度。在至少一个实施例中,选择器和/或滑块的每次输入可以引起系统生成随后的步幅长度命令。在一个或更多个实施例中,系统可以处理受试者标识符并且从数据库或诸如此类中检索存储的步幅长度命令。从本文的讨论中将会理解,在各个实施例中,系统可以基于受试者的身高、重量等来计算步幅长度。
在步骤2204,系统确定致动参数。在各个实施例中,致动参数可以指致动位置和/或达到接收到的步幅长度和/或增量输入所需的致动启动持续时间。在至少一个实施例中,致动器参数可以基于接收到的步幅长度和/或接收到的增量输入。在一个或更多个实施例中,系统可以通过计算以下内容来确定致动参数:1)实现步幅长度和/或增量所需的旋转半径;和2)使步幅长度联动机构平移以达到计算出的半径所使用的平移的方向和量级。在各个实施例中,系统可以通过执行以下一个或更多个动作来计算旋转半径,包括但不限于:数学计算、表查找或其他计算方法。例如,系统可以求解与旋转半径、步幅长度联动机构位置和/或平移以及步幅长度有关的方程式。示例性步幅长度方程式可以是方程式2,其中Ls表示步幅长度,r表示旋转半径,并且c表示Ls与r之间的恒定比。
LS=r*c (方程式2)
在同一示例中,受试者可以输入30英寸的步幅长度(Ls)。系统可以基于步幅长度和0.6的恒定比(c)计算出18英寸的旋转半径。在另一示例中,系统可以基于与步幅长度和旋转半径有关的一个或更多个表来确定旋转半径。
在各个实施例中,在确定旋转半径后,系统可以确定包括平移的方向和量级的致动参数。在至少一个实施例中,确定平移的方向和量级可以包括但不限于:1)通过确定驱动联动机构的当前位置来确定当前旋转半径;和2)通过将当前旋转半径与计算出的旋转半径进行比较来确定致动参数。继续上面的示例,系统可以经由一个或更多个传感器确定15英寸的当前旋转半径。系统可以将当前半径与计算出的半径进行比较,并确定(+)3英寸的致动参数,从而建立驱动联动机构必须远离旋转中心平移3英寸。在至少一个实施例中,系统可以将基于长度的致动参数转变成启动持续时间致动参数,或者转变可以由步幅长度致动器来自动执行。
在步骤2206,系统执行步幅长度致动。在各个实施例中,执行步幅长度致动可以包括但不限于将包括步骤2204确定的致动参数的致动命令传输至步幅长度致动器。在各个实施例中,致动命令可以引起步幅长度致动器在确定的方向上并且以确定的平移量级接合和平移驱动联动机构,从而以计算出的旋转半径定位步幅长度联动机构,并且实现所需的步幅长度。在一个或更多个实施例中,如果受试者或操作者经由GUI的增量输入来执行步幅长度配置,则系统可以引起步幅长度致动器响应于每次输入而接合并且使驱动联动机构平移预编程的距离,并且在经由增量输入确定的方向上平移。
附加实施例的描述
在至少一个实施例中,齿轮系统1210可以以与普通人的臂长和腿长的比成比例的比来提供同步的受试者的臂部运动(例如,经由手柄1202)和腿部运动(例如,经由踏板1204)。在至少一个实施例中,普通人的臂长可以测得为大约23英寸-27英寸,并且普通人的臂长可以测得为大约31英寸-35英寸。在各个实施例中,齿轮系统1210内的一个或更多个齿轮比可以确定踏板1204的平移与手柄1202的对应的反向平移之间的比。例如,齿轮系统1210可以包括两个具有特定齿轮比的齿轮。特定的齿轮比可以引起踏板1204的平移成比例地大于手柄1202的对应的反向平移。在至少一个实施例中,可以选择特定的齿轮比,因为在典型的步态周期中,足部的步幅长度(例如,足部向前平移的量级)可以大于对应的手部的步幅长度。因此,为了提供现实的步态周期,齿轮系统1210可以被配置成使得踏板1204的步幅长度大于手柄1202的步幅长度。在至少一个实施例中,手柄1202的步幅长度可以通过以下方式来计算:1)确定一组受试者的平均臂长(例如,百分之90);和2)选择齿轮系统1210的齿轮比,以促进由表现出所确定的平均臂长的受试者经历的典型的步态周期足部/手部平移。在各个实施例中,齿轮系统1210可以包括用于改变踏板1204平移与手柄1202反向平移之间的比的一个或更多个机构。例如,齿轮系统1210可以包括用于在其中操纵一个或更多个齿轮比的机构。在至少一个实施例中,一个或更多个机构可以包括但不限于:1)传动装置;2)齿轮切换机构(如,例如,类似于自行车齿轮变换机构的机构);3)变矩器(如,例如,磁粉离合器);和4)用于配置和/或修改齿轮比和/或修改平移比的附加机构。
在至少一个实施例中,锁销系统119可以包括一个或更多个触发机构,该一个或更多个触发机构允许受试者和/或操作者与锁定系统119脱离接合。例如,锁销系统119内的弹簧加载的锁销机构可以连接到缆绳的第一端,该第一端在被拉动时将锁销机构从锁定空隙中取回(如本文所述),从而使锁销系统119脱离接合。在同一示例中,缆绳可以在第二端处连接到触发器,并且缆绳可以被配置为使得拉动触发器以足以使锁销系统119脱离接合的位移来拉动缆绳。触发器可以被配置在附接到康复设备100的外表面的手柄内。在各个实施例中,滑架103的平移和塔柱101的旋转可以分别经由上述锁定脱离机构来控制。
系统可以包括电子控制的锁销和/或塔柱旋转系统。在至少一个实施例中,该系统包括致动器和/或马达,该致动器和/或马达允许使用者(例如,经由GUI)选择塔柱的旋转位置,并且系统将大体自动地将塔柱旋转至所选择的旋转位置。
在至少一个实施例中,随着外踏板连杆1203前进经过向前平移和反向平移(例如,作为联动机构111操作的结果),外踏板连杆1203可以使连接的踏板1204升高和/或降低。例如,外踏板连杆1203可以定位在最大反向平移点处(例如,如图13所示)。在最大反向平移点处,外踏板连杆1203可以将连接的踏板1204向下驱动至降低的位置。在同一示例中,随着外踏板连杆1203经历向前平移(例如,如图14所示),外踏板连杆1203可以将踏板1204向上驱动到升高位置。在到达最大向前平移点之后,外踏板连杆1203可以经历反向平移,并且外踏板连杆1203可以在整个反向平移中向下驱动踏板1204。
在各个实施例中,一个或更多个联动机构和/或踏板1204可以以一定的方式被配置,该方式使得升高动作和降低动作类似于足部进行自然步态周期所经历的升高动作和降低动作。例如,如图13所示,当联动机构111被配置在类似于步态周期的承重反应和/或站立中期阶段的位置时,踏板1204可以被定向在降低的位置。作为另一示例,如图14所示,当联动机构111被配置在类似于步态周期的摆动阶段的位置时,踏板1204可以被定向在升高位置。作为附加示例,如图15所示,当联动机构11被配置在类似于步态周期的承重反应阶段的位置时,踏板1204可以定位在部分降低的位置。在至少一个实施例中,踏板1204在整个步态周期中的竖直行进可以手动地和/或自动地调节。在一个或更多个实施例中,竖直行进可以由沿着共享轴线连接的外踏板连杆1203的端部与内踏板连杆1205的端部之间的距离来确定。在至少一个实施例中,(连接的踏板1204的)竖直行进可以通过沿着共享轴线增加外踏板连杆1203的端部与内踏板连杆1205的端部之间的距离来增大。在各个实施例中,可以经由螺纹系统、轮系统、快速销系统或一种或更多种其他系统和/或方法来调节距离。在一个或更多个实施例中,竖直行进的调节可以允许康复器100更舒适地适应各种尺寸的受试者。
在一个或更多个实施例中,踏板1204还可包括枢转装置。在至少一个实施例中,枢转装置可以允许踏板1204随着踏板1204进行步态周期而枢转。在各个实施例中,枢转装置可以有利地提供与足部进行自然步态周期所经历的枢转运动类同的枢转运动。在一个或更多个实施例中,枢转机构还可以沿着踏板1204平移,并且可以在特定的平移点处锁定。例如,枢转机构可以以一定的方式沿踏板1204平移,该方式使得枢转机构与配置在踏板1204内的受试者足部跖球对准(并且包括最靠近滑架的“足趾端”和距离滑架最远的“足跟端”)。在一个或更多个实施例中,将枢转机构定位成与受试者的足部对准可以进一步在整个步态周期中提供现实的运动。例如,在自然步态周期中,在首次触地阶段与承重反应阶段之间过渡期间,受试者的足部可以绕足部跖球枢转,直到足部放平为止。因此,在人工步态周期期间及其过渡期间,枢转机构可以允许踏板1204绕枢转点枢转,从而定向成更加大体上水平的位置,并且因此模仿自然步态周期的运动。
在一个或更多个实施例中,康复系统100可以包括虚拟现实系统,该虚拟现实系统向定位在其中的受试者提供虚拟训练体验。在各个实施例中,虚拟现实系统可以包括但不限于:1)视觉配件,诸如例如头盔、眼镜、屏幕和/或其组合;和2)虚拟现实引擎,诸如例如能够在视觉配件上呈现动态虚拟现实环境的计算环境。在一个或更多个实施例中,虚拟现实引擎还可以接收来自一个或更多个传感器的输出,这些传感器在训练活动期间测量受试者的表现。例如,虚拟现实引擎可以接收步进频率,并且可以调节一个或更多个虚拟现实内容参数,以反映受试者运动所用的有效速度。在至少一个实施例中,虚拟现实系统还可以包括一个或更多个输入设备,该一个或更多个输入设备允许受试者与虚拟环境及其中的内容进行互动和交互。在一个或更多个实施例中,虚拟现实系统(和/或康复系统100)还可以包括一个或更多个眼睛跟踪子系统,该一个或更多个眼睛跟踪子系统确定受试者正在看哪里(例如,观看显示器、GUI、等等)并且允许受试者经由眼睛跟踪子系统和/或一个或更多个输入配件提供输入。
在至少一个实施例中,一个或更多个手柄1202(如图13-图15所示)的运动可以提供在健康的、自然的步态周期中所经历的手部运动的精确模仿。在各种实施例中,健康的步态周期可以包括但不限于:1)在自然步态周期中所表现的范围内的手部平移与足部平移之间的比;2)在自然步态周期中所表现的范围内的平均手部高度;和3)与自然步态周期中所表现的手部位置大体上相似的手部位置。例如,椭圆机可能会呈现不健康的步态周期,包括:1)不准确的手部平移-足部平移比(例如,对于相应的足部平移,手部平移过小);2)超过自然步态周期中所表现的范围的平均手部高度(例如,平均手部高度等于或高于躯干中部高度,而健康范围可能落在髋部高度附近);和3)不能代表健康步态周期中手部位置的手部位置(例如,手部定向到躯干中部上方的位置)。因此,本康复系统100可以表现出与由椭圆机表现出的运动不同的人工步态。在至少一个实施例中,与经由椭圆机提供的运动相比,康复系统100表现出的步态可能在生理上更准确和/或更有助于运动康复。在一个或更多个实施例中,由康复系统100表现出的手部步态运动和自然手部步态运动可以是大体上相似的,应注意到,椭圆机的手部步态运动可能与自然手部步态运动基本不同。
可替代的实施例的描述
在各个实施例中,本系统可以从一个或更多个输入系统接收通信、输入、选择和/或命令。在至少一个实施例中,一个或更多个输入系统可以包括但不限于:1)基于语音的系统;2)基于光学的系统;和3)脑机接口(BCI)。在一个示例中,基于语音的系统可以接收和处理音频信号(例如,受试者的语音),以确定受试者希望执行和/或提供的动作、选择或其他输入。在一个实施例中,基于语音的系统可以处理语音输入以引起动作,这些动作包括但不限于接收配置和课程选择(如本文所述)。作为另一示例,基于光学的系统可以跟踪和处理受试者的眼睛(双眼)的运动和行为,以识别可以与一个或更多个动作(例如,诸如选择各种系统参数和/或命令)相对应的运动和行为(例如,输入)。作为附加示例,BCI可以记录并处理受试者的神经信号,以转译和/或生成各种系统输入。在示例性场景下,可以训练BCI来识别神经信号并将其与系统动作和配置和课程选择相关联。
在一个或更多个实施例中,系统可以基于收集的课程数据自动地调节课程参数。例如,系统可以包括一个或更多个力传感器,以检测由受试者施加到一个或更多个踏板、手柄、把手等上的力。在同一示例中,系统可以处理来自一个或更多个力传感器的测量,以识别受试者的表现和疲劳并根据一个或更多个运动康复协议(例如,编程到系统中和/或由系统操作员配置的)来调节课程参数。在示例性场景中,在电动课程期间,力传感器可以检测到受试者在踏板处施加的力已经减小了特定比例(例如,峰值力的50%)。在检测到力减小后,系统可以识别出受试者需要增大辅助,并且可以自动地增大提供给受试者的辅助(如本文所述)。在另一示例性场景下,一个或更多个手柄中的力传感器可以检测到受试者正在通过靠在手柄上来部分地支撑其自身。在同一场景下,系统可以确定受试者需要额外的BWS使能的负载减轻,并且可以自动地配置BWS系统以增大由受试者经历的减负力。作为另一示例,系统可以基于课程参数自动地调节阻力或辅助参数,这些课程参数包括但不限于:1)步数(例如,与预定步进阈值相比);2)步进频率(例如,与预定步进频率阈值相比);和3)峰值步进时段(例如,与峰值步进时段阈值相比)。在一个示例中,系统可以在课程期间自动地逐渐减小和/或增量地增加阻力或辅助,并且可以根据动态计算或根据一个或更多个预编程的逐渐减小的/增加的时间表来执行逐渐减小和/或增加。
在至少一个实施例中,系统可以能够经由远程医疗进行操作。例如,系统可以包括控制器和输出装置(例如,显示器、扬声器等),其允许系统操作者(例如,体能教练等)向执行课程的受试者远程提供辅助、指导和鼓励。作为另一示例,系统可以操作,以将受试者的表现读数(例如,实时地或以其他方式)传输到远程系统操作者以进行评估。在各个实施例中,系统可以包括一种或更多种分析环境、统计环境和/或机器学习环境,以用于对收集的受试者数据(例如,课程表现、课程参数等)进行处理、评估和建模。例如,系统可以执行一种或更多种机器学习技术,以对历史课程参数和课程表现进行建模(例如,来源于基于单独的数据和聚合的数据两者),并且确定可能对受试者最有益的康复训练程序。
在一个或更多个实施例中,系统可以包括数字社交平台或诸如此类,其允许受试者上传课程表现数据,并且观看由其他人上传的课程表现数据。例如,系统可以包括社交媒体平台,社交媒体平台允许系统受试者进行互动、提供鼓励并且共享课程参数(例如,训练程序等)。在至少一个实施例中,系统可以操作,以与记录体能表现的一个或更多个可穿戴的健身配件通信。例如,系统可以操作,以将课程参数和表现数据传输到电子健身带。
在各个实施例中,在滑架103处产生的步态运动可以由联动机构111(如本文所述)产生,或者可以由改型的联动机构或其他步态运动系统产生。在至少一个实施例中,改型的联动系统可以省略和/或组合联动机构111的元件。例如,改型的联动系统可以省略第一连接连杆和第二连接连杆。替代地,手柄连杆1211可以经由单个连接件连接到齿轮系统1210,该单个连接件使手柄连杆1211沿着轨道旋转并引导,从而使手柄连杆1211沿着表示自然手部步态运动的弧线行进和引导。作为另一示例,可以经由独立地操作但协调的致动器系统来产生手柄步态运动,这使得手柄1202的平移与踏板1204的平移同步。在一个或更多个实施例中,可以经由独立于滑架103的系统来产生手柄步态运动。例如,可以经由手柄系统来生成手柄步态运动,该手柄系统与滑架103分离且不同,但是使手柄运动与其踏板运动同步。
在一个或更多个实施例中,滑架103可包括多个联动机构111,该多个联动机构111接收独立配置和编程的辅助力和阻力(例如,经由马达单元1217和一个或更多个离合器1223)。例如,滑架103可以包括左联动机构111和右联动机构111。每个联动机构111可以从连接的马达单元1217接收辅助,但是可以通过配置在每个联动机构内的离合器1223为每个联动机构111独立地校准辅助和/或阻力的量级。
结论
从展示内容和通过引用并入的其他申请中公开的信息,本文讨论的系统、方法、过程、变型、装置和产品的方面、特征和益处将变得明显。在不脱离本公开的新颖概念的精神和范围的情况下,可以对所公开的系统和方法进行改变和修改。
然而将理解,由展示内容或通过引用并入的申请中公开的信息不旨在对本公开的范围进行限制;如在本文中示出的本公开的所描述或示出的实施例的任何改变和进一步修改以及任何原理的进一步应用将被本公开所涉及的领域的技术人员正常地想到。
前面的示例性实施例的描述仅出于图示和描述的目的呈现,且并非旨在穷举的或将本发明限制到所公开的精确形式。鉴于上面的教导,许多修改和变化是可能的。
选择和描述实施例,以便解释本发明的原理及其实际应用,以使本领域其他技术人员能够利用本发明和各种实施例,并且以适合于所设想的特定用途的各种修改来利用本发明和各种实施例。可替代的实施例对本发明所属领域的普通技术人员而言将变得明显,而不脱离其精神和范围。因此,本发明的范围由所附权利要求而不是前面的描述和其中描述的示例性实施例来限定。
从前述内容中将理解的是,本文描述的过程的各个方面是在形成系统的部分的计算机系统上执行的软件过程。因此,将理解的是,本文描述的系统的各个实施例总体上被实现为专门配置的计算机,其包括各种计算机硬件部件以及在许多情况下与常规或已知的计算机、过程或诸如此类相比显着附加的特征,如本文更详细讨论的。本公开范围内的实施例也包括计算机可读介质,以用于携带或具有计算机可执行指令或存储于其上的数据结构。这样的计算机可读介质可以是可由计算机访问或可通过通信网络下载的任何可用介质。作为示例而非限制,这种计算机可读介质可以包括各种形式的数据存储设备或介质,例如RAM、ROM、闪存存储器、EEPROM、CD-ROM、DVD或其他光盘存储器、磁盘存储器、固态驱动器(SSD)或其他数据存储设备,任何类型的可移除非易失性存储器,例如安全数字(SD)、闪存存储器、记忆棒等,或者任何其他可用于携带或存储以计算机可执行指令形式的计算机程序代码或可以由计算机访问的数据结构。
当信息通过网络或另一通信连接(硬接线的、无线的或硬接线和无线的组合)被传送或提供至计算机时,该计算机适当地将该连接视为计算机可读介质。因此,任何这种连接被适当地称为并且被视为计算机可读介质。以上的组合也应被包括在计算机可读介质的范围内。计算机可执行指令包括例如使计算机执行一个特定功能或一组功能的指令和数据。
本领域技术人员将理解,可以在其中实现本公开的方面的合适的计算环境的特征和方面。尽管不是必需的,但是可以在计算机可执行指令(例如如前所述的程序模块或引擎)的上下文中描述所要求保护的发明的一些实施例,这些计算机可执行指令由网络环境中的计算机执行。这样的程序模块通常由流程图、序列图、示例性屏幕显示器和本领域技术人员用来通知如何制作和使用这样的计算机程序模块的其他技术来反映和说明。总体上,程序模块包括例程、程序、功能、目标、部件、数据结构、对本地计算机或远程计算机等其他计算机调用的应用程序编程接口(API),这些计算机在计算机内执行特定任务或实现特定定义的数据类型。计算机可执行指令、相关联的数据结构和/或模式、以及程序模块表示用于执行本文公开的方法的步骤的程序代码的示例。这样的可执行指令或相关联的数据结构的特定序列表示用于实现在这些步骤中描述的功能的相应动作的示例。
本领域技术人员还将理解,所要求保护和/或描述的系统和方法可以在具有许多类型的计算机系统配置的网络计算环境中实践,所述计算系统配置包括个人计算机、智能电话、平板电脑、手持设备、多处理器系统、基于微处理器或可编程的消费类电子产品、联网PC、小型计算机、大型计算机等等。在分布式计算环境中实践所要求保护的发明的实施例,在分布式计算环境中,任务由通过通信网络链接(通过硬接线的链路、无线链路、或通过硬接线的链路或无线链路的组合)的本地处理设备和远程处理设备执行。在分布式计算环境中,程序模块可以位于本地存储设备和远程存储设备中。
用于实现所描述的操作的各个方面的示例性系统(未示出)包括计算设备,该计算设备包括处理单元、系统存储器以及系统总线,该系统总线将各种系统部件(包括系统存储器)联接到处理单元。计算机通常包括一个或更多个数据存储设备,以用于从中读取数据或向其写入数据。数据存储设备提供计算机可执行指令、数据结构、程序模块和用于计算机的其他数据的非易失性存储。
实现本文描述的功能的计算机程序代码通常包括可以存储在数据存储设备上的一个或更多个程序模块。如本领域技术人员已知,该程序代码通常包括操作系统、一个或更多个应用程序、其他程序模块和程序数据。使用者可以通过键盘、触摸屏、点选设备、包含以脚本语言写入的计算机程序代码的脚本或其他输入设备(未示出)(例如麦克风等)将命令和信息输入计算机。这些输入设备和其他输入设备通常通过已知的电连接、光学连接或无线连接来连接到处理单元。
实现所描述的过程的许多方面的计算机通常将使用与一个或更多个远程计算机或数据源的逻辑连接来在联网环境下操作,这将在下面进一步描述。远程计算机可以是另一台个人计算机、服务器、路由器、网络PC、对等设备或其他公共网络节点,并且通常包括上文描述的相对于体现本发明的主计算机系统的许多或所有元素。计算机之间的逻辑连接包括局域网(LAN)、广域网(WAN)、虚拟网络(WAN或LAN)和无线LAN(WLAN),在这里以示例而非限制的方式提出。这种联网环境在办公室范围或企业范围的计算机网络、内联网和互联网中是常见的。
当在LAN或WLAN网络环境中使用时,实现本发明各方面的计算机系统通过网络接口或适配器连接到本地网络。当在WAN或WLAN网络环境中使用时,计算机可以包括调制解调器、无线链路或其他用于通过广域网(例如互联网)建立通信的机制。在联网环境中,可以将相对于计算机或其部分所描绘的程序模块存储在远程数据存储设备中。将理解的是,所描述或示出的网络连接是示例性的,并且可以使用在广域网或互联网上建立通信的其他机制。
尽管已经在优选实施例的上下文中描述了各个方面,但是本领域普通技术人员将从本文的描述中容易地辨别所要求保护的发明的其他方面、特征和方法。在不脱离权利要求的实质或范围的情况下,除了本文描述的那些内容之外,本公开和所要求保护的发明的许多实施例和适应改变以及许多变化、修改和等效布置和方法从本公开及其以上详细描述将是明显的或被本公开及其以上详细描述合理地建议。此外,本文描述和要求保护的各种过程的步骤的任何(多个)顺序和/或时间顺序是被认为是预期用于执行所要求保护的发明的最佳模式的那些顺序和/或时间顺序。还应该理解,尽管可以以优选的顺序或时间顺序示出和描述各种处理的步骤,但是任何这样的处理的步骤不限于以任何特定的次序或顺序执行,不存在特定的顺序来指示达到特定预期结果。在大多数情况下,可以以各种不同的顺序和次序来执行这样的处理的步骤,同时仍然落入所要求保护的发明的范围内。另外,一些步骤可以与其他步骤同时、同频或同步地进行。
选择和描述实施例,以便解释所要求保护的发明的原理及其实际应用,以使本领域其他技术人员能够利用本发明和各种实施例,并且以适合于所设想的特定用途的各种修改来利用本发明和各种实施例。可替代的实施例对要求保护的发明所属领域的技术人员而言将变得明显,而不脱离其精神和范围。因此,所要求保护的发明的范围由所附权利要求而不是由前面的描述和其中描述的示例性实施例来限定。
Claims (20)
1.一种步态训练设备,包括:
手柄,其用于训练臂部运动;
踏板,其用于训练腿部运动,其中所述踏板的运动引起:
内踏板连杆的运动,从而引起可操作地连接到所述内踏板连杆的弯曲连杆旋转并接合齿轮系统;
所述齿轮系统使第一连接连杆旋转,其中:
所述第一连接连杆与第二连接连杆大体平行;
所述第一连接连杆和所述第二连接连杆可操作地连接在手柄连杆的一部分的相对端附近;并且
所述第一连接连杆的旋转引起所述手柄连杆以弧线运动,从而引起所述手柄与所述手柄连杆一起以弧线运动,从而大体上模仿人类行走步态的手部运动。
2.根据权利要求1所述的步态训练设备,其中所述步态训练设备包括联动系统,所述联动系统可操作地连接到所述手柄和所述踏板,以用于同步所述腿部运动和所述臂部运动,所述联动系统包括:
所述第一连接连杆;
所述手柄连杆;
所述弯曲连杆;
所述内踏板连杆;
所述齿轮系统;和
滑架板,其大体上垂直于表面。
3.根据权利要求2所述的步态训练设备,其中:
所述弯曲连杆可操作地连接到所述内踏板连杆、在前部固定点处可操作地连接到所述滑架板、以及可操作地连接到齿轮系统;并且
所述弯曲连杆能够操作以用于绕所述前部固定点旋转。
4.根据权利要求3所述的步态训练设备,其中:
所述手柄连杆的所述部分是第一部分;并且
所述手柄连杆的所述第一部分大体上平行于所述表面;并且
所述手柄连杆包括与所述第一部分形成锐角的第二部分。
5.根据权利要求4所述的步态训练设备,其中所述踏板被配置成沿着基座运动。
6.根据权利要求5所述的步态训练设备,其中所述踏板:
包括最靠近所述滑架板的足趾端和最远离所述滑架板的足跟端;并且
被配置成枢转,使得所述足趾端和所述足跟端随着所述踏板沿着所述基座运动而升高或降低。
7.根据权利要求6所述的步态训练设备,其中使所述踏板平行于所述基座运动第一特定距离引起所述手柄沿着所述弧线平行于所述基座运动第二特定距离,其中所述第二特定距离小于所述第一特定距离。
8.根据权利要求7所述的步态训练设备,其中所述第二特定距离与所述第一特定距离之间的差与普通人的臂长与腿长之间的差成比例。
9.根据权利要求8所述的步态训练设备,其中所述第二特定距离与所述第一特定距离之间的差至少部分地由所述齿轮系统控制。
10.根据权利要求9所述的步态训练设备,其中所述联动系统包括驱动连杆,所述驱动连杆在中心固定点处可操作地连接到所述滑架板,所述驱动连杆能够操作以绕所述中心固定点旋转。
11.根据权利要求10所述的步态训练设备,其中所述驱动连杆可操作地连接到离合器和传动系统。
12.根据权利要求11所述的步态训练设备,其中所述离合器是磁粉离合器。
13.根据权利要求12所述的步态训练设备,其中所述步态训练设备包括可操作地连接到所述驱动连杆和所述踏板的外踏板连杆。
14.根据权利要求13所述的步态训练设备,其中马达可操作地连接到所述离合器和传动系统,并且引起所述驱动连杆的旋转,从而引起所述外踏板连杆和所述踏板的运动。
15.根据权利要求13所述的步态训练设备,其中所述离合器和传动系统经由所述驱动连杆和所述外踏板连杆向所述踏板的运动提供阻力。
16.一种步态训练设备,包括:
手柄,其用于训练臂部运动;
踏板,其用于训练腿部运动;和
联动系统,其可操作地连接到所述手柄和所述踏板,以用于同步所述腿部运动和所述臂部运动,所述联动系统包括:
第一连接连杆;
手柄连杆;
弯曲连杆;
内踏板连杆;
齿轮系统;和
滑架板,其大体上垂直于表面,其中所述踏板的运动引起:
所述内踏板连杆的运动,从而引起可操作地连接到所述内踏板连杆的所述弯曲连杆旋转并接合所述齿轮系统;并且
所述齿轮系统使第一连接连杆旋转,其中:
所述第一连接连杆与第二连接连杆大体平行;
所述第一连接连杆和所述第二连接连杆可操作地连接在所述手柄连杆的一部分的相对端附近;并且
所述第一连接连杆的旋转引起所述手柄连杆以弧线运动,从而引起所述手柄与所述手柄连杆一起以弧线运动,从而大体上模仿人类行走步态的手部运动。
17.根据权利要求16所述的步态训练设备,其中所述联动系统包括驱动连杆,所述驱动连杆在中心固定点处可操作地连接到所述滑架板,所述驱动连杆能够操作以绕所述中心固定点旋转。
18.根据权利要求17所述的步态训练设备,其中所述步态训练设备包括可操作地连接到所述驱动连杆和所述踏板的外踏板连杆。
19.根据权利要求18所述的步态训练设备,其中马达可操作地连接到所述离合器和传动系统,并且引起所述驱动连杆的旋转,从而引起所述外踏板连杆和所述踏板的运动。
20.根据权利要求18所述的步态训练设备,其中所述离合器和传动系统经由所述驱动连杆和所述外踏板连杆向所述踏板的运动提供阻力。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862728762P | 2018-09-08 | 2018-09-08 | |
| US62/728,762 | 2018-09-08 | ||
| PCT/US2019/050239 WO2020051592A1 (en) | 2018-09-08 | 2019-09-09 | Rehabilitation device providing locomotion training and method of use |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112996573A true CN112996573A (zh) | 2021-06-18 |
Family
ID=69719323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980073639.3A Pending CN112996573A (zh) | 2018-09-08 | 2019-09-09 | 提供运动训练的康复设备及使用方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US10736808B2 (zh) |
| EP (1) | EP3846914A4 (zh) |
| CN (1) | CN112996573A (zh) |
| CA (1) | CA3112168A1 (zh) |
| WO (1) | WO2020051592A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114486037A (zh) * | 2022-02-18 | 2022-05-13 | 橙象医疗科技(广州)有限公司 | 一种具有测力装置的路况模拟设备及其控制方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107943289B (zh) * | 2017-11-16 | 2020-11-06 | 陈昭胜 | Vr行走机构以及在虚拟现实场景中行走的方法 |
| KR102127011B1 (ko) * | 2019-02-11 | 2020-06-25 | 큐렉소 주식회사 | 진입 특성이 향상된 착석형 보행재활로봇 |
| US11266879B2 (en) * | 2020-02-24 | 2022-03-08 | Hiwin Technologies Corp. | Adaptive active training system |
| CN111686413B (zh) * | 2020-05-22 | 2021-05-07 | 黑龙江省医院 | 一种神经内科下肢训练装置 |
| CN112807190B (zh) * | 2020-12-28 | 2022-10-21 | 四川大学华西医院 | 一种脊髓损伤康复用智能辅助系统 |
| CN113679567B (zh) * | 2021-08-25 | 2022-06-14 | 连云港市第二人民医院(连云港市临床肿瘤研究所) | 一种基于步态感知技术的下肢康复机器人 |
| CN113663292B (zh) * | 2021-09-09 | 2022-09-27 | 河南省洛阳正骨医院(河南省骨科医院) | 一种骨科用下体训练仪 |
| WO2023064869A1 (en) * | 2021-10-15 | 2023-04-20 | Osteostrong Franchising, Inc. | Exercise systems and related methods |
| WO2023118978A1 (ru) * | 2021-12-22 | 2023-06-29 | Давит АРСЕНЯН | Умный имитатор ходьбы |
| CN115245424A (zh) * | 2022-01-15 | 2022-10-28 | 杨杰 | 一种神经内科临床用康复装置 |
| CN114642567B (zh) * | 2022-02-28 | 2022-11-22 | 燕山大学 | 多体位开放式下肢康复机器人 |
| BR202022006310U2 (pt) * | 2022-04-01 | 2023-10-10 | Fernando Vieira Dantas | Disposição construtiva introduzida em dispositivo para reabilitação e treinamento de pessoas com ou sem limitações físicas motoras |
| CN117419916B (zh) * | 2023-11-12 | 2024-03-19 | 山东宝德龙健身器材有限公司 | 一种健身器材用稳定性和疲劳度试验装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020123412A1 (en) * | 2001-03-01 | 2002-09-05 | Nguyen Hieu Trong | Multi-function exercise apparatus |
| US20050049117A1 (en) * | 2003-08-29 | 2005-03-03 | Rodgers Robert E. | Striding simulators |
| US7377881B2 (en) * | 2002-08-07 | 2008-05-27 | Daniel Ross Moon | Adjustable stride elliptical motion exercise machine and associated methods |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4169589A (en) * | 1977-09-28 | 1979-10-02 | Mcarthur James A | Leg exercising apparatus |
| US5209223A (en) * | 1991-03-20 | 1993-05-11 | Biodex Medical Systems, Inc. | Single chair muscle exercise and rehabilitation apparatus |
| US5403251A (en) * | 1993-06-04 | 1995-04-04 | Chattanooga Group, Inc. | Patient positioning system and method for computer controled muscle exercising machine |
| US5529560A (en) * | 1993-06-08 | 1996-06-25 | David Dise | Stretch therapy apparatus for physical fitness, rehabilitation and medical treatment |
| US5536224A (en) * | 1995-11-16 | 1996-07-16 | Lifegear, Inc. | Striding exercise apparatus |
| US5595555A (en) * | 1996-05-14 | 1997-01-21 | Chen; David | Walking exercise apparatus |
| US5735778A (en) * | 1997-02-13 | 1998-04-07 | Piaget; Gary D. | Exercise apparatus including an improved upper body exercise device |
| US5876307A (en) * | 1997-04-04 | 1999-03-02 | Stearns; Kenneth W. | Elliptical motion exercise apparatus |
| US5908373A (en) * | 1997-04-09 | 1999-06-01 | Pitre; John | Full body exercise apparatus |
| US5916065A (en) * | 1998-02-10 | 1999-06-29 | Stamina Products, Inc. | Multiple leg movement exercise apparatus |
| US5876308A (en) * | 1998-06-26 | 1999-03-02 | Jarvie; John E. | Running exercise machine |
| US6090014A (en) * | 1999-08-09 | 2000-07-18 | Eschenbach; Paul William | Adjustable cross trainer exercise apparatus |
| US6926646B1 (en) * | 2000-11-13 | 2005-08-09 | Hieu T. Nguyen | Exercise apparatus |
| TW543466U (en) * | 2002-09-12 | 2003-07-21 | Johnson Health Tech Co Ltd | Single/dual functional switching device for exercise of leg/hand for oval exercise cart |
| CA2485140C (en) * | 2003-11-17 | 2013-07-02 | Zinnur Akhmetov | Cardiovascular spine exerciser |
| US6955632B2 (en) * | 2004-02-17 | 2005-10-18 | Leao Wang | Oval-tracked exercise apparatus for simulating hand-movement |
| US7163492B1 (en) * | 2004-07-15 | 2007-01-16 | Sotiriades Aleko D | Physical therapy walking exercise apparatus |
| US7104929B1 (en) | 2005-03-03 | 2006-09-12 | Paul William Eschenbach | Adjustable elliptical exercise machine |
| US20080004163A1 (en) * | 2006-06-30 | 2008-01-03 | Husted Royce H | Exercise machine |
| US8172729B2 (en) * | 2009-11-16 | 2012-05-08 | Ellis Joseph K | Exercise treadmill for simulating pushing and pulling actions and exercise method therefor |
| US7794362B2 (en) * | 2007-10-19 | 2010-09-14 | Larry D. Miller Trust | Exercise device with adjustable stride |
| US8740754B2 (en) * | 2010-01-11 | 2014-06-03 | Larry D. Miller | Adaptive exercise device |
| US8113996B1 (en) * | 2010-02-12 | 2012-02-14 | Tad Allen | Dual action recumbent exercise cycle |
| US9510990B2 (en) * | 2010-08-23 | 2016-12-06 | Michael J. Workman | Gait training apparatuses, attachments for gait training and related methods |
| US9707448B2 (en) * | 2012-08-08 | 2017-07-18 | Hoist Fitness Systems, Inc. | Exercise machine with movable user support |
| US9248071B1 (en) | 2013-03-15 | 2016-02-02 | Ergoflex, Inc. | Walking, rehabilitation and exercise machine |
| US20140296035A1 (en) * | 2013-03-28 | 2014-10-02 | Leao Wang | Simple harmonic motion exercise device |
| CN107961522B (zh) | 2013-09-11 | 2019-07-09 | 赛百斯国际健身器材有限公司 | 锻炼设备 |
| CA2938531A1 (en) * | 2013-12-13 | 2015-06-18 | ALT Innovations LLC | Multi-modal gait-based non-invasive therapy platform |
| US9757612B2 (en) * | 2014-01-24 | 2017-09-12 | Nustep, Inc. | Locking device for recumbent stepper |
| WO2015134693A1 (en) * | 2014-03-07 | 2015-09-11 | Kalinowski Eugene | Motorized air walker and suspension system for paralyzed persons |
| US9295874B1 (en) * | 2014-11-24 | 2016-03-29 | Yi-Tzu Chen | Elliptical trainer |
| US9457223B2 (en) * | 2015-01-27 | 2016-10-04 | Paul William Eschenbach | Stride seeker elliptical exercise apparatus |
| US9636540B2 (en) * | 2015-03-10 | 2017-05-02 | True Fitness Technology, Inc. | Adjustable stride elliptical motion exercise machine with large stride variability and fast adjustment |
| CN106075814B (zh) * | 2016-08-01 | 2018-11-06 | 青岛英派斯健康科技股份有限公司 | 一种椭圆健步机 |
| US9873014B1 (en) * | 2016-12-03 | 2018-01-23 | Sportsart Industrial Co., Ltd. | Arm and leg compound exercise machine |
| US11607360B2 (en) * | 2017-08-19 | 2023-03-21 | Bala R. Vatti | Multi-function adaptable lift system |
| RU2706598C1 (ru) * | 2019-07-22 | 2019-11-19 | Зинур Борисович Ахметов | Биокинетический эллипсоид Ахметова для разработки и укрепления позвоночного столба и всей опорно-двигательной системы в комплексе и его варианты |
-
2019
- 2019-09-09 EP EP19857277.8A patent/EP3846914A4/en active Pending
- 2019-09-09 WO PCT/US2019/050239 patent/WO2020051592A1/en active Application Filing
- 2019-09-09 US US16/565,131 patent/US10736808B2/en active Active
- 2019-09-09 CN CN201980073639.3A patent/CN112996573A/zh active Pending
- 2019-09-09 CA CA3112168A patent/CA3112168A1/en active Pending
-
2020
- 2020-06-16 US US16/902,836 patent/US11432985B2/en active Active
-
2022
- 2022-07-27 US US17/875,038 patent/US20220362092A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020123412A1 (en) * | 2001-03-01 | 2002-09-05 | Nguyen Hieu Trong | Multi-function exercise apparatus |
| US7377881B2 (en) * | 2002-08-07 | 2008-05-27 | Daniel Ross Moon | Adjustable stride elliptical motion exercise machine and associated methods |
| US20050049117A1 (en) * | 2003-08-29 | 2005-03-03 | Rodgers Robert E. | Striding simulators |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114486037A (zh) * | 2022-02-18 | 2022-05-13 | 橙象医疗科技(广州)有限公司 | 一种具有测力装置的路况模拟设备及其控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA3112168A1 (en) | 2020-03-12 |
| WO2020051592A1 (en) | 2020-03-12 |
| EP3846914A4 (en) | 2022-06-15 |
| US10736808B2 (en) | 2020-08-11 |
| US20200360219A1 (en) | 2020-11-19 |
| US11432985B2 (en) | 2022-09-06 |
| US20200078251A1 (en) | 2020-03-12 |
| EP3846914A1 (en) | 2021-07-14 |
| US20220362092A1 (en) | 2022-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11432985B2 (en) | Rehabilitation device providing locomotion training and method of use | |
| CN208799724U (zh) | 踝关节训练适配件及踝关节康复训练设备 | |
| US11541274B2 (en) | System, method and apparatus for electrically actuated pedal for an exercise or rehabilitation machine | |
| US8888723B2 (en) | Gait rehabilitation methods and apparatuses | |
| EP3938060B1 (en) | System, method and apparatus for exercise or rehabilitation equipment | |
| EP2919866B1 (en) | Person support apparatuses having exercise therapy features | |
| US6780142B1 (en) | Lower limb function training device | |
| US20100152629A1 (en) | Integrated system to assist in the rehabilitation and/or exercising of a single leg after stroke or other unilateral injury | |
| WO2010067034A2 (fr) | Appareil d'exercice musculaire et/ou articulaire | |
| US10744362B2 (en) | Exercise machine | |
| US8062191B2 (en) | Recumbent stepper | |
| JP7105013B2 (ja) | 体重免荷装置 | |
| CN211097308U (zh) | 一种脚踏装置及行走恢复装置 | |
| Lu et al. | The development of a smart chair to assist sit-to-stand transferring process | |
| CN113749612B (zh) | 踝关节评估装置、设备、系统、方法及存储介质 | |
| CN112007329B (zh) | 一种医用术后康复装置 | |
| Seth | An investigation into bench testing of microprocessor controlled prosthetic knee joints |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20210618 |
|
| WD01 | Invention patent application deemed withdrawn after publication |