CN112201611B - 磁浮重力补偿装置以及包括该装置的运动台 - Google Patents
磁浮重力补偿装置以及包括该装置的运动台 Download PDFInfo
- Publication number
- CN112201611B CN112201611B CN202011379009.XA CN202011379009A CN112201611B CN 112201611 B CN112201611 B CN 112201611B CN 202011379009 A CN202011379009 A CN 202011379009A CN 112201611 B CN112201611 B CN 112201611B
- Authority
- CN
- China
- Prior art keywords
- magnetic steel
- magnetic
- inner base
- steel
- compensation device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N15/00—Holding or levitation devices using magnetic attraction or repulsion, not otherwise provided for
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
本发明公开了一种磁浮重力补偿装置,包括:内基磁钢,所述内基磁钢沿轴向延伸;第一端部磁钢和第二端部磁钢,第一端部磁钢和第二端部磁钢分别位于内基磁钢的两个轴向端并沿轴向延伸,且第一端部磁钢和第二端部磁钢的外径分别沿远离内基磁钢的两个轴向端方向逐渐增大;外磁环磁钢,外磁环磁钢呈筒状,与内基磁钢同轴地位于内基磁钢外且与内基磁钢径向间隔开。本发明实现了磁浮输出力沿行程呈线性的特性,且在零位点处输出力可抵消垂向结构重力。发明既能够补偿垂向运动机构的重力,又能以磁场线性化为基础实现恒刚度补偿,在行程范围内平衡了柔性机构的弹性变形反作用力,降低了垂向执行器的负荷,大大提高了微动台的垂向性能。
Description
技术领域
本发明涉及集成电路装备制造领域,更具体地涉及一种恒刚度磁浮重力补偿装置以及包括该装置的运动台。
背景技术
在半导体硅片制造或者检测领域,要求工件台可以和硅片传输系统完成硅片的交接,同时需要承载着硅片完成硅片的精密定位,最终完成硅片的制造或者检测。所以对于应用制造或者检测的工件台装置中,微动台是其核心部件,可完成硅片在Z/Rx/Ry垂向三轴的精确定位。常规的垂向三轴微动台中,通常采用三个执行器进行三点布局,再通过柔性机构进行垂向导向和运动解耦,保证垂向性能。但随着对晶圆制造或者晶圆检测产率要求的不断提高,制造或检测精度的不断提升,工件台的运行速度、加速度和性能也随之提高,对微动台部件的运动精度,加速度及速度要求越来越高。为此业界提出了重力补偿技术,来提高微动台的性能。但对于带柔性机构的微动台,在小行程范围内,其柔性机构的弹簧刚度为恒定值,作用在垂向执行器上的反力是随着垂向位移线性增加或者减小的,常规的恒力重力补偿装置难以满足垂向台的高性能要求。
为此,在美国专利US9172291B2中,提出一种采用磁浮装置和机械弹簧补偿垂向重力、音圈电机补偿柔性机构的反作用力,由于柔性机构的作用力随位移变化而变化,该装置的线圈匝数也随垂向位移变化而变化以补偿柔性机构的作用力。但该装置结构复杂、线圈的加工制造上存在一定难度,且机械弹簧与磁浮装置的耦合力也存在一定的非线性,不利于实现高控制精度。
美国专利US2009066168A1所提出的磁浮音圈电机装置,通过磁浮重力补偿装置的磁阻力补偿垂向运动模块的重力,通过调节线圈输入电流的幅值与方向补偿柔性机构的作用力。但该磁浮音圈电机不仅磁路结构复杂,而且输出磁浮力的刚度接近于零,因而必须要通过控制算法实现控制精度。
因此,现阶段需要一种结构简单,小行程范围内刚度恒定,且和柔性机构的刚度相反的重力补偿装置,即零位点处补偿装置可输出与垂向运动模块重力幅值相同、方向相反的作用力,且补偿装置的输出刚度保证恒定。业界常用的气浮重力补偿装置,可通过比例阀来实时调节压缩气体的压力可实现恒刚度的重力补偿,但气浮重力补偿装置结构非常复杂,且气动的控制存在滞后性,对提高垂向性能有影响。
发明内容
本发明的目的是提供一种结构和控制简单,且控制不存在滞后性的恒刚度磁浮重力补偿装置,以解决上述现有技术中存在的问题。
具体地,本发明提供了一种磁浮重力补偿装置,包括:
内基磁钢,所述内基磁钢沿轴向延伸;
第一端部磁钢和第二端部磁钢,所述第一端部磁钢和所述第二端部磁钢分别位于所述内基磁钢的两个轴向端并沿轴向延伸,且所述第一端部磁钢和第二端部磁钢的外径分别沿远离所述内基磁钢的所述两个轴向端方向逐渐增大;
外磁环磁钢,所述外磁环磁钢呈筒状,与所述内基磁钢同轴地位于所述内基磁钢外且与所述内基磁钢径向间隔开。
在一实施例中,所述第一端部磁钢和所述第二端部磁钢的充磁方向为从所述内基磁钢沿轴向向外,所述外磁环磁钢的充磁方向为径向向外。
在一实施例中,所述第一端部磁钢和所述第二端部磁钢相对于所述内基磁钢的轴向平分面镜像对称。
在一实施例中,所述内基磁钢、所述第一端部磁钢和所述第二端部磁钢中心轴线彼此重合且关于所述中心轴线旋转对称。
在一实施例中,所述内基磁钢具有轴向通孔,所述第一端部磁钢和第二端部磁钢具有轴向通孔。
在一实施例中,所述内基磁钢呈圆筒状,所述第一端部磁钢由沿轴向彼此邻接的多段筒状磁钢组成,所述第二端部磁钢由沿轴向彼此邻接的多段筒状磁钢组成,所述多段筒状磁钢的内径相同,而各外径从远离所述内基磁钢的筒状磁钢朝向靠近所述内基磁钢的筒状磁钢依次减小。
在一实施例中,所述第一端部磁钢的多段筒状磁钢中各相邻筒状磁钢的外径之差相等,且轴向长度相等;以及
所述第二端部磁钢的多段筒状磁钢中各相邻筒状磁钢的外径之差相等,且轴向长度相等。
在一实施例中,所述第一端部磁钢由沿轴向彼此邻接的三段筒状磁钢组成,所述第二端部磁钢由沿轴向彼此邻接的三段筒状磁钢组成。
在一实施例中,所述第一端部磁钢和所述第二端部磁钢中最远离所述内基磁钢的筒状磁钢的外径为R5,轴向长度为L5,内基磁钢的外径为R2,外磁环磁钢的轴向长度为L1,其中R2/2≤R5≤R2,L1/4≤L5≤L1/2。
在一实施例中,所述内基磁钢的所述轴向通孔的径向尺寸与所述第一端部磁钢和第二端部磁钢的轴向通孔的径向尺寸相同。
在一实施例中,所述第一端部磁钢和第二端部磁钢的所述轴向通孔的径向尺寸自远离所述内基磁钢的端部朝向所述内基磁钢减小。
在一实施例中,所述第一端部磁钢和第二端部磁钢的所述轴向通孔的内周面与径向方向的夹角β与所述第一端部磁钢和第二端部磁钢的外周面与径向方向的夹角α的关系为α≤β≤135°。
在一实施例中,所述外磁环磁钢由沿周向彼此邻接的多个弧形板组成。
在一实施例中,所述内基磁钢包括径缩段,所述径缩段位于内基磁钢的轴向中段且外径小于其余部分的外径。
在一实施例中,所述外磁环磁钢的轴向长度为L1,端部磁钢的轴向长度为L2,内基磁钢的轴向长度为L3,所述端部磁钢和所述内基磁钢相对于所述外磁环磁钢沿轴向移动行程为S,机械行程与有效行程的差值为ΔS,则L3+2L2-L1=S+ΔS,其中ΔS/S的取值范围为[0.1,3.0]。
在一实施例中,所述端部磁钢的底角为α为60°至88°。
在一实施例中,所述端部磁钢的底角为α为75°。
本发明还提供一种运动台,包括工件台和底座,所述工件台设置成能够相对于所述底座旋转和垂向移动,所述工件台下方设有上述磁浮重力补偿装置。本发明的磁浮重力补偿装置解决了现有技术气动恒刚度重力补偿装置结构复杂,控制复杂,控制存在滞后性等问题;解决了现有重力补偿装置刚度为零或非线性的问题。本发明实现了磁浮输出力沿行程呈线性的特性,且在零位点处输出力可抵消垂向结构重力。发明既能够补偿垂向运动机构的重力,又能以磁场线性化为基础实现恒刚度补偿,在行程范围内平衡了柔性机构的弹性变形反作用力,降低了垂向执行器的负荷,大大提高了微动台的垂向性能。
附图说明
图1是根据本发明第一实施例的磁浮重力补偿装置的结构示意图。
图2是图1所示实施例的纵剖示意图。
图3是图1所示实施例的磁钢充磁方向示意图。
图4是图1所示实施例的磁钢尺寸示意图。
图5是图1所示实施例的行程范围内输出力曲线。
图6是根据本发明第二实施例的磁浮重力补偿装置的结构示意图。
图7是根据本发明第三实施例的磁浮重力补偿装置的磁钢尺寸示意图(D2>D3)。
图8是根据本发明第三实施例的磁浮重力补偿装置的磁钢尺寸示意图(D2<D3)。
图9是根据本发明第三实施例的磁浮重力补偿装置的磁钢尺寸示意图(R3=R2)。
图10是根据本发明第三实施例的磁浮重力补偿装置的磁钢尺寸示意图(R3>R2)。
图11是根据本发明第四实施例的磁浮重力补偿装置的磁钢充磁方向示意图。
图12是根据本发明第四实施例的磁浮重力补偿装置的输出力曲线。
图13是根据本发明第四实施例的磁浮重力补偿装置的结构及磁钢充磁方向示意图。
图14是根据本发明第五实施例的磁浮重力补偿装置的楔形孔结构示意图。
图15是根据本发明第六实施例的磁浮重力补偿装置的结构示意图。
图16是根据本发明第七实施例的阶梯磁钢组结构示意图。
图17是根据本发明第七实施例的阶梯磁钢组充磁方向示意图。
图18是根据本发明第七实施例的阶梯磁钢组磁钢尺寸示意图。
图19是根据本发明第八实施例的圆台磁钢及圆环磁钢方案结构示意图。
图20是根据本发明第八实施例的圆台磁钢及圆环磁钢方案尺寸示意图。
图21是根据本发明的磁浮重力补偿装置在运动台中的布局形式。
具体实施方式
以下将结合附图对本发明的较佳实施例进行详细说明,以便更清楚理解本发明的目的、特点和优点。应理解的是,附图所示的实施例并不是对本发明范围的限制,而只是为了说明本发明技术方案的实质精神。
在下文的描述中,出于说明各种公开的实施例的目的阐述了某些具体细节以提供对各种公开实施例的透彻理解。但是,相关领域技术人员将认识到可在无这些具体细节中的一个或多个细节的情况下来实践实施例。在其它情形下,与本申请相关联的熟知的装置、结构和技术可能并未详细地示出或描述从而避免不必要地混淆实施例的描述。
在整个说明书中对“一个实施例”或“一实施例”的提及表示结合实施例所描述的特定特点、结构或特征包括于至少一个实施例中。因此,在整个说明书的各个位置“在一个实施例中”或“在一实施例”中的出现无需全都指相同实施例。另外,特定特点、结构或特征可在一个或多个实施例中以任何方式组合。
在以下描述中,为了清楚展示本发明的结构及工作方式,将借助诸多方向性词语进行描述,但是应当将“前”、“后”、“左”、“右”、“外”、“内”、“向外”、“向内”、“上”、“下”等词语理解为方便用语,而不应当理解为限定性词语。本文中“X向”、“X方向”和“Y向”、“Y方向”表示沿水平方向彼此相交的方向,“Z向”和“Z方向”表示垂直方向。
半导体硅片制造或者检测领域,要求工件台能够实现其上所承载硅片绕Z向的旋转和垂向升降。工件台可通过音圈电机进行驱动实现其升降,为了降低音圈电机的负载以及提高垂向运动精度,通常设置例如磁浮重力补偿装置的重力补偿装置。为了实现工件台相对于底座的倾斜,在工件台与底座之间可设置弹性连接件,随着工件台沿垂向方向的升降,弹性连接件会产生弹力,该弹力随工件台的行程线性变化。本发明提供一种随行程线性变化的磁浮重力补偿装置,以实现对工件台重力以及弹性连接件弹力的补偿。
现参照附图描述根据本发明的各实施例。
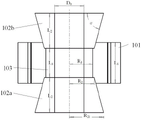
参见图1和2,根据本发明一实施例的磁浮重力补偿装置100包括:内基磁钢103、第一端部磁钢102a和第二端部磁钢102b、以及外磁环磁钢101。其中内基磁钢103呈圆筒状,第一端部磁钢102a和第二端部磁钢102b分别位于内基磁钢103的两轴向端并沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢102a位于内基磁钢103的轴向下方,而第二端部磁钢102b位于内基磁钢103的轴向上方。
在图示实施例中,第一端部磁钢102a和第二端部磁钢102b呈圆台形,且外径尺寸分别从靠近内基磁钢103的两轴向端朝下和朝上逐渐增大。第一端部磁钢102a和第二端部磁钢102b各设有轴向通孔,其轴向通孔与内基磁钢103的轴向通孔具有相同的直径且彼此连通。第一端部磁钢102a和第二端部磁钢102b的形状和尺寸彼此相同,且关于内基磁钢103的中分径向面镜像对称。外磁环磁钢101呈圆筒状,且与内基磁钢103同轴地位于内基磁钢103外,并与内基磁钢103径向间隔开。在所示实施例中,第一端部磁钢102a和第二端部磁钢102b与内基磁钢103邻接,但应理解,其间也可设置一定的气隙,该气隙通常不大于1mm。
在该实施例中,外磁环磁钢101为重力补偿装置定子磁钢,而内基磁钢103以及第一端部磁钢102a和第二端部磁钢102b为重力补偿装置动子磁钢。但应理解,也可设置成外磁环磁钢101为重力补偿装置动子磁钢,而内基磁钢103以及第一端部磁钢102a和第二端部磁钢102b为重力补偿装置定子磁钢。
如图2中的剖视图所示,磁浮重力补偿装置100的定子磁钢和动子磁钢之间无机械连接,在行程范围内,定子磁场与动子磁钢间相互作用可产生刚度不变的垂向作用力,本发明中该垂向作用力即可理解为装置的磁浮力,其中当外磁环磁钢101和内基磁钢103相对于彼此轴向居中时即为装置零位点,由于装置在零位点时需补偿工件台的重力,因而其输出磁浮力幅值需与工件台重力相等,弹性连接件弹力为零,此时磁浮重力补偿装置的输出磁浮力方向垂向向上。由于在工件台与底座之间所设置的弹性连接件的输出力随工件台垂向运动而线性变化,因而,只有当装置的输出磁浮力也随工件台垂向运动而线性变化、且两者变化斜率相等时,磁浮重力补偿装置才能完全实现工件台重力和弹性连接件弹力的补偿作用。以此为基础,装置中第一端部磁钢102a和第二端部磁钢102b的外径尺寸需从靠近内基磁钢103的两端分别朝下和朝上逐渐增大,需要说明的是,当第一端部磁钢102a和第二端部磁钢102b的外径尺寸变化梯度与弹性连接件输出弹力的变化梯度一致时,在垂向任意位置,该装置输出磁浮力与弹性连接件的输出弹力幅值均相等。
图3中示出了磁浮重力补偿装置100中各磁钢的充磁方向。其中内基磁钢103和第二端部磁钢102b的充磁方向相同且均为轴向向上,而第一端部磁钢102a的充磁方向为轴向向下,外磁环磁钢101的充磁方向为径向向外。同理,也可设置成外磁环磁钢101的充磁方向为径向向内,而第一端部磁钢102a的充磁方向为沿轴向向上,第二端部磁钢102b和内基磁钢103的充磁方向相同且均为沿轴向向下。
还如图1所示,外磁环磁钢101由8块分块磁钢拼接而成。其中8块分块磁钢为由一圆筒以45°等角间隔沿径向平分的弧形板磁钢。但应理解,外磁环磁钢101也可其他数量的分块磁钢拼接而成,为了消除外磁环磁钢101产生的径向不平衡力,其分块数N设为偶数,例如2块、4块、6块等。外磁环磁钢101由分块磁钢拼接而成便于磁钢进行充磁和加工。在外磁环磁钢101采用多块磁钢拼接而成的情况下,磁钢的极弧系数a取值与磁浮重力补偿装置的输出刚度正相关,磁钢的极弧系数a是磁钢的极弧长度与极距的比值,极弧系数a的取值较佳地为[0.7,0.95]。
如图2所示,第一端部磁钢102a和第二端部磁钢102b邻接内基磁钢103的一端的外径大于内基磁钢103的外径。但应理解,第一端部磁钢102a和第二端部磁钢102b邻接内基磁钢103的一端的外径也可等于或小于内基磁钢103的外径,且第一端部磁钢102a和第二端部磁钢102b的该外径尺寸大小影响磁浮重力补偿装置在行程范围内输出磁浮力的斜率。
图4中示出了磁浮重力补偿装置100的尺寸示意图。如图4所示,外磁环磁钢101、第一端部磁钢102a和第二端部磁钢102b、以及内基磁钢103的轴向长度分别为L1、L2和L3,第一端部磁钢102a和第二端部磁钢102b邻接内基磁钢103一端的半径和内基磁钢103半径分别用R2和R3表示,第一端部磁钢102a和第二端部磁钢102b远离内基磁钢103一端的半径用R21表示,第一端部磁钢102a和第二端部磁钢102b以及内基磁钢103的轴向通孔的直径用D0表示,第一端部磁钢102a和第二端部磁钢102b的底角用α表示。假设磁浮重力补偿装置的总行程为S,机械行程与有效行程的差值为ΔS,则外磁环磁钢101、第一端部磁钢102a和第二端部磁钢102b和内基磁钢103的轴向长度之间的关系为L3+2L2-L1=S+ΔS,式中ΔS的取值主要与补偿装置总行程S相关,通常ΔS/S的取值范围为[0.1,3.0]。第一端部磁钢102a和第二端部磁钢102b邻接内基磁钢103一端的半径和内基磁钢103的半径之间的关系取决于零位点处磁浮重力补偿装置所需补偿的重量大小,即工件台的重力。本实施例中,较佳地为R2>R3。在第一端部磁钢102a和第二端部磁钢102b和内基磁钢103外径确定的情况下,其轴向通孔直径D0大小与磁浮重力补偿装置刚度相关。本实施例中,考虑磁浮重力补偿装置的集成和装配工艺的难易程度,第一端部磁钢102a和第二端部磁钢102b以及内基磁钢103轴向通孔的尺寸相同。第一端部磁钢102a和第二端部磁钢102b底角α决定磁场线性度,进而影响了磁浮重力补偿装置的刚度大小,在轴向通孔直径和有效气隙长度确定的前提下,第一端部磁钢102a和第二端部磁钢102b底角α越大,磁浮重力补偿装置的刚度越大,底角α的取值范围为[60°,88°],通常,底角α可表示为 ,本实施例中第一端部磁钢102a和第二端部磁钢102b底角α较佳地选取为75°。
,本实施例中第一端部磁钢102a和第二端部磁钢102b底角α较佳地选取为75°。
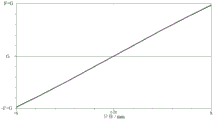
图5中示出了磁浮重力补偿装置100的输出力仿真曲线。图中横轴表示磁浮重力补偿装置的行程、纵轴表示输出力幅值。图中标注了两行程端点和零位点及其对应的输出力。图中x为单向的极限位移、G为单个磁浮重力补偿装置需补偿的工件台重力,假设磁浮重力补偿装置的设计刚度为k,则正向行程端点x处磁浮重力补偿装置的输出力幅值为G+F=G+kx,由此可知磁浮重力补偿装置的输出力范围为[-F+G,F+G]。从图中可以看出,该磁浮重力补偿装置的输出力随行程线性变化,从而能够补偿工件台的重力以及弹性连接件产生的线性变化的弹力。
图6中示出根据本发明另一实施例的磁浮重力补偿装置200。该实施例与磁浮重力补偿装置100基本上相同,即磁浮重力补偿装置200包括:内基磁钢203、第一端部磁钢202a和第二端部磁钢202b、以及外磁环磁钢201。其中内基磁钢203呈圆筒状,第一端部磁钢202a和第二端部磁钢202b分别位于内基磁钢203的两轴向端并从内基磁钢203沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢202a位于内基磁钢203的轴向下方,而第二端部磁钢202b位于内基磁钢203的轴向上方。第一端部磁钢202a和第二端部磁钢202b呈圆台形,且外径尺寸均从邻近内基磁钢203的两轴向端朝向远离内基磁钢203的方向逐渐增大。第一端部磁钢202a和第二端部磁钢202b各设有轴向通孔,其轴向通孔与内基磁钢203的轴向通孔具有相同的直径且彼此连通。第一端部磁钢202a和第二端部磁钢202b的形状和尺寸彼此相同,且关于内基磁钢203的轴向中分径向面镜像对称。外磁环磁钢201呈圆筒状,且与内基磁钢203同轴地位于内基磁钢203外,并与内基磁钢203径向间隔开。磁浮重力补偿装置200与磁浮重力补偿装置100的区别在于外磁环磁钢201由一块径向充磁磁钢构成。
图7和8中示出了根据本发明第三实施例的磁浮重力补偿装置300。该实施例与磁浮重力补偿装置100基本上相同,即磁浮重力补偿装置300包括:内基磁钢303、第一端部磁钢302a和第二端部磁钢302b、以及外磁环磁钢301。其中内基磁钢303呈圆筒状,第一端部磁钢302a和第二端部磁钢302b分别位于内基磁钢303的两轴向端并从内基磁钢303沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢302a位于内基磁钢303的轴向下方,而第二端部磁钢302b位于内基磁钢303的轴向上方。第一端部磁钢302a和第二端部磁钢302b呈圆台形,且外径尺寸均从邻近内基磁钢303的两轴向端朝向远离内基磁钢303的方向逐渐增大。第一端部磁钢302a和第二端部磁钢302b各设有轴向通孔,其轴向通孔与内基磁钢303的轴向通孔彼此连通。第一端部磁钢302a和第二端部磁钢302b的形状和尺寸彼此相同,且关于内基磁钢303的轴向中分径向面镜像对称。外磁环磁钢301呈圆筒状,且与内基磁钢303同轴地位于内基磁钢303外,并与内基磁钢303径向间隔开。
磁浮重力补偿装置300与磁浮重力补偿装置100的区别在于第一端部磁钢302a和第二端部磁钢302b的轴向通孔与内基磁钢303的轴向通孔直径不同。第一端部磁钢302a和第二端部磁钢302b的轴向通孔直径可小于(图7)或大于(图8)内基磁钢303的轴向通孔直径。应理解,第一端部磁钢302a和第二端部磁钢302b的轴向通孔与内基磁钢303的轴向通孔直径关系与磁钢的安装方式相关,与磁浮重力补偿装置输出力的刚度与零位点补偿重力值无关。磁浮重力补偿装置零位点所补偿重力值与内基磁钢303所提供的磁场强度相关,在外磁环磁钢301相同情况下,内基磁钢303的磁场强度越大,零位点所补偿重力值越大。
图9和图10示出根据本发明第四实施例的磁浮重力补偿装置400。该实施例与磁浮重力补偿装置100基本上相同,即磁浮重力补偿装置400包括:内基磁钢403、第一端部磁钢402a和第二端部磁钢402b、以及外磁环磁钢401。其中内基磁钢403呈圆筒状,第一端部磁钢402a和第二端部磁钢402b分别位于内基磁钢403的两轴向端并从内基磁钢403沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢402a位于内基磁钢403的轴向下方,而第二端部磁钢402b位于内基磁钢403的轴向上方。第一端部磁钢402a和第二端部磁钢402b呈圆台形,且外径尺寸沿从内基磁钢403的两轴向端朝向远离内基磁钢403的方向逐渐增大。第一端部磁钢402a和第二端部磁钢402b各设有轴向通孔,其轴向通孔与内基磁钢403的轴向通孔彼此连通。第一端部磁钢402a和第二端部磁钢402b的形状和尺寸彼此相同,且关于内基磁钢403的轴向中分径向面镜像对称。外磁环磁钢401呈圆筒状,且与内基磁钢403同轴地位于内基磁钢403外,并与内基磁钢403径向间隔开。
区别在于,磁浮重力补偿装置100中,第一端部磁钢102a和第二端部磁钢102b邻接内基磁钢103的一端的外径小于内基磁钢103的外径,而在磁浮重力补偿装置400中,第一端部磁钢402a和第二端部磁钢402b邻接内基磁钢403的一端的外径等于或小于内基磁钢403的外径。
图11中示出了根据本发明第四实施例的磁浮重力补偿装置500。该实施例与磁浮重力补偿装置100基本上相同,即磁浮重力补偿装置500包括:内基磁钢503、第一端部磁钢502a和第二端部磁钢502b、以及外磁环磁钢501。其中内基磁钢503呈圆筒状,第一端部磁钢502a和第二端部磁钢502b分别位于内基磁钢503的两轴向端并从内基磁钢503沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢502a位于内基磁钢503的轴向下方,而第二端部磁钢502b位于内基磁钢503的轴向上方。第一端部磁钢502a和第二端部磁钢502b呈圆台形,且外径尺寸沿从邻近内基磁钢503的两轴向端朝向远离内基磁钢503的方向逐渐增大。第一端部磁钢502a和第二端部磁钢502b各设有轴向通孔,其轴向通孔与内基磁钢503的轴向通孔彼此连通。第一端部磁钢502a和第二端部磁钢502b的形状和尺寸彼此相同,且关于内基磁钢503的轴向中分径向面镜像对称。外磁环磁钢501呈圆筒状,且与内基磁钢503同轴地位于内基磁钢503外,并与内基磁钢503径向间隔开。
区别在于,磁浮重力补偿装置100中,内基磁钢103的充磁方向为轴向,而在磁浮重力补偿装置500中,内基磁钢503的充磁方向与外磁环磁钢501的充磁方向相同且均为径向向外。但应理解,在磁浮重力补偿装置500中,也可设置成第一端部磁钢502a和第二端部磁钢502b的充磁方向为从远离内基磁钢503的一端朝向内基磁钢503的方向,而内基磁钢503和外磁环磁钢501的充磁方向相同且均为径向向内。在某些应用环境中,重力补偿装置在零位点处不需要补偿工件台的重力,因此,磁浮重力补偿装置500可采用上述充磁方向。在该情况下,还可替代地设置成内基磁钢504可由多块径向充磁的分块磁钢拼接而成(参见第七实施例的磁浮重力补偿装置800)。
此外,内基磁钢504还可由未充磁的高磁导率材料加工而成的圆筒505替代,如图13所示,内基磁钢未充磁时,磁浮重力补偿装置的输出力刚度会有所降低,本实施例中所述高磁导率材料优选为坡莫合金。
图12示出了磁浮重力补偿装置500的输出力曲线。图中横轴为磁浮重力补偿装置的行程、纵轴为输出力幅值,图中标注了两行程端点和零位点及其对应的输出力。由图可知,零位点处磁浮重力补偿装置的输出力幅值为零。假设磁浮重力补偿装置的设计刚度为k,则正向行程端点处磁浮重力补偿装置的输出力幅值为F=kx,由此可得磁浮重力补偿装置的输出力范围为[-F,F]。
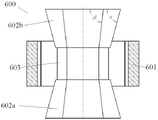
图14中示出了根据本发明第五实施例的磁浮重力补偿装置600。该实施例与磁浮重力补偿装置100基本上相同,即磁浮重力补偿装置600包括:内基磁钢603、第一端部磁钢602a和第二端部磁钢602b、以及外磁环磁钢601。其中内基磁钢603呈圆筒状,第一端部磁钢602a和第二端部磁钢602b分别位于内基磁钢603的两轴向端并从内基磁钢603沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢602a位于内基磁钢603的轴向下方,而第二端部磁钢602b位于内基磁钢603的轴向上方。第一端部磁钢602a和第二端部磁钢602b呈圆台形,且外径尺寸沿从内基磁钢603的两轴向端朝向远离内基磁钢603的方向逐渐增大。第一端部磁钢602a和第二端部磁钢602b各设有轴向通孔,其轴向通孔与内基磁钢603的轴向通孔彼此连通。第一端部磁钢602a和第二端部磁钢602b的形状和尺寸彼此相同,且关于内基磁钢603的中分径向面镜像对称。外磁环磁钢601呈圆筒状,且与内基磁钢603同轴地位于内基磁钢603外,并与内基磁钢603径向间隔开。
区别在于,磁浮重力补偿装置100中,第一端部磁钢602a和第二端部磁钢602b的轴向通孔的直径沿轴向保持恒定,而在磁浮重力补偿装置600中,第一端部磁钢602a和第二端部磁钢602b的轴向通孔的直径沿从内基磁钢朝向远离内基磁钢的方向逐渐增大,即其轴向通孔呈圆台形。与轴向通孔直径保持恒定相比,圆台形通孔的加工难度更大,但通过调整第一端部磁钢602a和第二端部磁钢602b的圆台形通孔的底角β与第一和第二端部磁钢底角α的大小关系,可一定程度地微调磁浮重力补偿装置的输出刚度k,其中圆台形通孔的底角β与第一和第二端部磁钢底角α的关系可表示为:(1)60°≤α≤88°,(2)α≤β≤135°。本实施例中,α与β的取值优选为α=75°、β=82°。
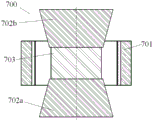
图15中示出了根据本发明第六实施例的磁浮重力补偿装置700。该实施例与磁浮重力补偿装置100基本上相同,即磁浮重力补偿装置700包括:内基磁钢703、第一端部磁钢702a和第二端部磁钢702b、以及外磁环磁钢701。第一端部磁钢702a和第二端部磁钢702b分别位于内基磁钢703的两轴向端并从内基磁钢703沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢702a位于内基磁钢703的轴向下方,而第二端部磁钢702b位于内基磁钢703的轴向上方。第一端部磁钢702a和第二端部磁钢702b呈圆台形,且外径尺寸沿从内基磁钢703的两轴向端朝向远离内基磁钢的方向逐渐增大。第一端部磁钢702a和第二端部磁钢702b的形状和尺寸彼此相同,且关于内基磁钢703的中分径向面镜像对称。外磁环磁钢701呈圆筒状,且与内基磁钢703同轴地位于内基磁钢703外,并与内基磁钢703径向间隔开。
区别在于该实施例中内基磁钢703呈圆柱形,第一端部磁钢702a和第二端部磁钢702b呈圆台形,内基磁钢703和第一端部磁钢702a和第二端部磁钢702b均不设轴向通孔。该设置在一定程度上增加了磁钢装配难度,但第一端部磁钢702a和第二端部磁钢702b和内基磁钢703的外径也相应程度地缩小,进而在磁浮重力补偿装置设计输出刚度k不变的前提下,可一定程度上缩小磁浮重力补偿装置体积;或在磁浮重力补偿装置体积不变的前提下,进一步提升磁浮重力补偿装置的设计输出刚度k。
为了便于第一端部磁钢702a和第二端部磁钢702b的加工,第一端部磁钢702a和第二端部磁钢702b也可由多个圆柱形轴向上下叠加组成的阶梯状磁钢组形成,其中阶梯状磁钢组中磁钢的轴向分块数为Nt、轴向相邻磁钢的径向尺寸和轴向尺寸的差值需依照设计需求通过仿真迭代得出。通常,阶梯状磁钢组中轴向磁钢的分块数Nt取值范围为Nt≥2、Nt∈Z,轴向相邻磁钢的径向尺寸差值决定了磁浮重力补偿装置的输出刚度,轴向相邻磁钢的轴向尺寸值及差值决定了补偿装置的输出位移大小。较佳地,阶梯状磁钢组轴向磁钢的分块数Nt为3、轴向相邻磁钢的径向尺寸差值均为2.0mm。
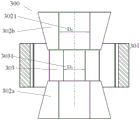
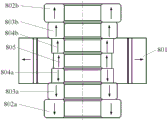
图16中示出了根据本发发明第七实施例的磁浮重力补偿装置800。磁浮重力补偿装置800包括:内基磁钢805、第一端部磁钢804a、803a和802a以及第二端部磁钢804b、803b和802b以及外磁环磁钢801。其中内基磁钢805呈圆筒状,第一端部磁钢804a、803a和802a以及第二端部磁钢804b、803b和802b分别位于内基磁钢805的两轴向端并依次从内基磁钢805沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢804a、803a和802a位于内基磁钢805的轴向下方,而第二端部磁钢804b、803b和802b位于内基磁钢805的轴向上方。各第一端部磁钢804a、803a和802a和各第二端部磁钢804b、803b和802b呈圆筒形,且外径尺寸沿从内基磁钢805的两端朝向远离内基磁钢805的方向依次增大。各第一端部磁钢804a、803a和802a和各第二端部磁钢804b、803b和802b均设有轴向通孔,其轴向通孔与内基磁钢805的轴向通孔直径相同且彼此连通。各第一端部磁钢804a、803a和802a和各第二端部磁钢804b、803b和802b的形状和尺寸分别彼此相同,且关于内基磁钢805的轴向中分径向面镜像对称。外磁环磁钢801呈圆筒状,且与内基磁钢805同轴地位于内基磁钢805外,并与内基磁钢805径向间隔开。
图17中示出了磁浮重力补偿装置800的磁钢充磁方向示意图。其中外磁环磁钢801的充磁方向为径向充磁,而内基磁钢805和各第一和第二端部磁钢的充磁方向为轴向充磁,其中各第一端部磁钢804a、803a和802a的充磁方向为轴向向上,而各第二端部磁钢804b、803b和802b的充磁方向为轴向向下,而内基磁钢805的充磁方向为轴向向上,外磁环磁钢801的充磁方向为径向向外。但应理解,也可设置成外磁环磁钢801的充磁方向径向向内,而各第一端部磁钢804a、803a和802a的充磁方向为轴向向下,而各第二端部磁钢804b、803b和802b的充磁方向为轴向向上,而内基磁钢805的充磁方向为轴向向下。还应理解,可设置成外磁环磁钢801的充磁方向为轴向充磁,而内基磁钢805和各第一和第二端部磁钢的充磁方向为径向充磁。
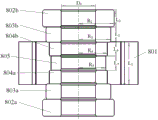
图18示出了根据本发明第七实施例的磁浮重力补偿装置800的尺寸示意图,图中磁钢组轴向磁钢的分块数Nt为3。其中外磁环磁钢801、内基磁钢805、第一端部磁钢804a、803a和802a和第二端部磁钢804b、803b和802b的轴向长度分别由L1、L5、L4、L3、L2表示,内基磁钢805和各第一和第二端部磁钢的轴向通孔相同且用D0表示,内基磁钢805和圆环磁钢802~804的半径分别用R5和R4、R3、R2表示。为了便于磁钢的装配,本实施例中轴向通孔的直径及各磁钢的尺寸关系为L2+L4=2L3,R2+R4=2R3,L2+L3+L4≥L1。在上述较佳实施例中,阶梯状磁钢组轴向磁钢的分块数Nt为3、轴向相邻磁钢的径向尺寸差值均为2.0mm。根据实施例中磁钢组轴向磁钢分块数Nt,可推导出各端部磁钢尺寸关系的设计准则,参考实施例1中端部磁钢底角α的取值,有

为了保证补偿装置输出刚度的一致性,优选地是轴向相邻磁钢的径向尺寸差值和轴向尺寸差值均相等,即R5-R4=R4-R3=R3-R2;L2-L3=L3-L4=L4-L5。但应理解,其径向尺寸差值和轴向尺寸差值也可彼此不同。还应理解,内基磁钢805和各第一和第二端部磁钢的的轴向通孔的直径D0也可彼此不同、或者其中的一个或多个设置成无轴向通孔。
内基磁钢的直径R5和轴向长度L5与工件台垂向运动机构的重量密切相关,通常,R5的取值范围R2/2≤R5≤R2,L5的取值范围L1/4≤L5≤L1/2。如果磁浮重力补偿装置所需补偿的重量增大或减小,为保证补偿装置的输出刚度不变,则只需调整R5和L5。
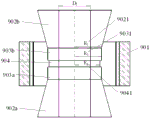
图19中示出了根据本发明第八实施例的磁浮重力补偿装置900。磁浮重力补偿装置900包括:内基磁钢903、第一端部磁钢902a和第二端部磁钢902b、以及外磁环磁钢901。第一端部磁钢902a和第二端部磁钢902b分别位于内基磁钢903的两轴向端并从内基磁钢903沿轴向向下和向上延伸。在所示实施例中,第一端部磁钢902a位于内基磁钢903的轴向下方,而第二端部磁钢902b位于内基磁钢903的轴向上方。第一端部磁钢902a和第二端部磁钢902b呈圆台形,且外径尺寸沿从内基磁钢903的两轴向端朝向远离内基磁钢903的方向逐渐增大。第一端部磁钢902a和第二端部磁钢902b的形状和尺寸彼此相同,且关于内基磁钢903的轴向中分径向面镜像对称。外磁环磁钢901呈圆筒状,且与内基磁钢903同轴地位于内基磁钢903外,并与内基磁钢903径向间隔开。应理解,第一端部磁钢902a和第二端部磁钢902b也可由一组圆筒状磁钢轴向依次邻接而组成。
区别在于该实施例中磁浮重力补偿装置900的内基磁钢903的轴向中间段具有径缩段904,径缩段904的轴向两端分别为第一轴向段903a和第二轴向段903b。径缩段904的直径小于第一轴向段903a和第二轴向段903b的直径。其中第一端部磁钢902a和第一轴向段903a的充磁方向均沿轴向向下,而径缩段904、第二端部磁钢902b与第二轴向段903b的充磁方向均沿轴向向上。该磁浮重力补偿装置900在零位点附近的刚度稍大,而两侧端点处刚度不变,可应用在零位点附近阻尼力较大的工况。
图20中示出了磁浮重力补偿装置900的尺寸示意图。其中第一端部磁钢902a和第二端部磁钢902b与内基磁钢903的轴向通孔直径相等,均为D0。第一端部磁钢902a和第二端部磁钢902b邻接内基磁钢903一端的外径、内基磁钢903的第一轴向段903a和第二轴向段903b的外径分别用R2和R3表示,优选地R2=R3,此时磁浮重力补偿装置900的线性度可达到最优。而径缩段904的直径用R4表示,其中R4<R3。
在以上所示各实施例中,较佳地是,内基磁钢、第一端部磁钢和第二端部磁钢具有共同的中心轴线,且关于该中心轴线旋转对称,从而确保产生的磁力沿周向均匀分布。
本发明还提供一种运动台,该运动台包括工件台和底座,工件台设置呈能够相对于底座旋转和垂向移动。其中工件台用于承载所要加工的工件。
图21中示出了使用根据本发明的磁浮重力补偿装置的工件台的仰视图。在工件台的下方设有凹腔,用于容纳根据本发明的磁浮重力补偿装置。其中工件台下方的凹腔可以是一个、两个、三个或四个。图中示出了一个磁浮重力补偿装置中心点布置、两个磁浮重力补偿装置并排布置、三个磁浮重力补偿装置呈例如正三角形布置以及四个磁浮重力补偿装置是呈正方形布置的示意图,但应理解,也可设置其他数量和其他布置的磁浮重力补偿装置。使用磁浮重力补偿装置的工作台的形状也不限于图示正方形,而是可以根据需要设置成任何形状。应理解,磁浮重力补偿装置的等效重心所在垂线需与垂向运动机构重心所在垂线共线。
根据本发明的磁浮重力补偿装置能够提供随行程线性变化的磁浮力,即能够补偿工件台的重力,又能够补偿恒刚度的弹性连接装置产生的弹力,能够满足某些情况下运动台对于重力补偿的需求。
以上已详细描述了本发明的较佳实施例,但应理解到,在阅读了本发明的上述讲授内容之后,本领域技术人员可以对本发明作各种改动或修改。这些等价形式同样落于本申请所附权利要求书所限定的范围。
Claims (18)
1.一种磁浮重力补偿装置,其特征在于,包括:
内基磁钢,所述内基磁钢沿轴向延伸;
第一端部磁钢和第二端部磁钢,所述第一端部磁钢和所述第二端部磁钢分别位于所述内基磁钢的两个轴向端并沿轴向延伸,且所述第一端部磁钢和第二端部磁钢的外径分别沿远离所述内基磁钢的所述两个轴向端方向逐渐增大;
外磁环磁钢,所述外磁环磁钢呈筒状,与所述内基磁钢同轴地位于所述内基磁钢外且与所述内基磁钢径向间隔开。
2.根据权利要求1所述的磁浮重力补偿装置,其特征在于,所述第一端部磁钢和所述第二端部磁钢的充磁方向为从所述内基磁钢沿轴向向外,所述外磁环磁钢的充磁方向为径向向外。
3.根据权利要求1所述的磁浮重力补偿装置,其特征在于,所述第一端部磁钢和所述第二端部磁钢相对于所述内基磁钢的轴向平分面镜像对称。
4.根据权利要求1所述的磁浮重力补偿装置,其特征在于,所述内基磁钢、所述第一端部磁钢和所述第二端部磁钢中心轴线彼此重合且关于所述中心轴线旋转对称。
5.根据权利要求1所述的磁浮重力补偿装置,其特征在于,
所述内基磁钢具有轴向通孔,所述第一端部磁钢和第二端部磁钢具有轴向通孔。
6.根据权利要求1所述的磁浮重力补偿装置,其特征在于,
所述内基磁钢呈圆筒状,所述第一端部磁钢由沿轴向彼此邻接的多段筒状磁钢组成,所述第二端部磁钢由沿轴向彼此邻接的多段筒状磁钢组成,所述多段筒状磁钢的内径相同,而各外径从远离所述内基磁钢的筒状磁钢朝向靠近所述内基磁钢的筒状磁钢依次减小。
7.根据权利要求1或6所述的磁浮重力补偿装置,其特征在于,
所述第一端部磁钢的多段筒状磁钢中各相邻筒状磁钢的外径之差相等,且轴向长度相等;以及
所述第二端部磁钢的多段筒状磁钢中各相邻筒状磁钢的外径之差相等,且轴向长度相等。
8.根据权利要求6所述的磁浮重力补偿装置,其特征在于,所述第一端部磁钢由沿轴向彼此邻接的三段筒状磁钢组成,所述第二端部磁钢由沿轴向彼此邻接的三段筒状磁钢组成。
9.根据权利要求1或6所述的磁浮重力补偿装置,其特征在于,所述第一端部磁钢和所述第二端部磁钢中最远离所述内基磁钢的筒状磁钢的外径为R5,轴向长度为L5,内基磁钢的外径为R2,外磁环磁钢的轴向长度为L1,其中R2/2≤R5≤R2,L1/4≤L5≤L1/2。
10.根据权利要求6所述的磁浮重力补偿装置,其特征在于,
所述内基磁钢的轴向通孔的径向尺寸与所述第一端部磁钢和第二端部磁钢的轴向通孔的径向尺寸相同。
11.根据权利要求6所述的磁浮重力补偿装置,其特征在于,
所述第一端部磁钢和第二端部磁钢的轴向通孔的径向尺寸自远离所述内基磁钢的端部朝向所述内基磁钢减小。
12.根据权利要求11所述的磁浮重力补偿装置,其特征在于,
所述第一端部磁钢和第二端部磁钢的所述轴向通孔的内周面与径向方向的夹角β与所述第一端部磁钢和第二端部磁钢的外周面与径向方向的夹角α的关系为α≤β≤135°。
13.根据权利要求1所述的磁浮重力补偿装置,其特征在于,
所述外磁环磁钢由沿周向彼此邻接的多个弧形板组成。
14.根据权利要求1所述的磁浮重力补偿装置,其特征在于,
所述内基磁钢包括径缩段,所述径缩段位于内基磁钢的轴向中段且外径小于其余部分的外径。
15.根据权利要求1所述的磁浮重力补偿装置,其特征在于,所述外磁环磁钢的轴向长度为L1,端部磁钢的轴向长度为L2,内基磁钢的轴向长度为L3,所述端部磁钢和所述内基磁钢相对于所述外磁环磁钢沿轴向移动行程为S,则L3+2L2-L1=S+ΔS,其中ΔS/S的取值范围为[0.1,3.0]。
16.根据权利要求1所述的磁浮重力补偿装置,其特征在于,所述端部磁钢的底角为α为60°至88°。
17.根据权利要求16所述的磁浮重力补偿装置,其特征在于,所述端部磁钢的底角为α为75°。
18.一种运动台,其特征在于,包括工件台和底座,所述工件台设置成能够相对于所述底座旋转和垂向移动,所述工件台下方设有根据权利要求1-16中任一项所述的磁浮重力补偿装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011379009.XA CN112201611B (zh) | 2020-12-01 | 2020-12-01 | 磁浮重力补偿装置以及包括该装置的运动台 |
| PCT/CN2021/076424 WO2022116393A1 (zh) | 2020-12-01 | 2021-02-10 | 磁浮重力补偿装置以及包括该装置的运动台 |
| JP2023528446A JP2023549227A (ja) | 2020-12-01 | 2021-02-10 | 磁気浮上式重力補償装置及び該装置を含む移動ステージ |
| KR1020237015977A KR20230079455A (ko) | 2020-12-01 | 2021-02-10 | 자기 부상 중력 보상 장치 및 이를 포함하는 무빙 테이블 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011379009.XA CN112201611B (zh) | 2020-12-01 | 2020-12-01 | 磁浮重力补偿装置以及包括该装置的运动台 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112201611A CN112201611A (zh) | 2021-01-08 |
| CN112201611B true CN112201611B (zh) | 2021-03-02 |
Family
ID=74034339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011379009.XA Active CN112201611B (zh) | 2020-12-01 | 2020-12-01 | 磁浮重力补偿装置以及包括该装置的运动台 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP2023549227A (zh) |
| KR (1) | KR20230079455A (zh) |
| CN (1) | CN112201611B (zh) |
| WO (1) | WO2022116393A1 (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112201611B (zh) * | 2020-12-01 | 2021-03-02 | 上海隐冠半导体技术有限公司 | 磁浮重力补偿装置以及包括该装置的运动台 |
| CN113048185B (zh) * | 2021-03-09 | 2022-04-19 | 复旦大学 | 一种重力补偿器及承载装置 |
| CN112994526B (zh) * | 2021-04-23 | 2022-05-24 | 上海隐冠半导体技术有限公司 | 一种磁浮重力补偿器 |
| CN113471112B (zh) * | 2021-07-16 | 2024-02-20 | 上海隐冠半导体技术有限公司 | 磁浮重力补偿装置和微动台 |
| CN113745138B (zh) * | 2021-09-03 | 2024-03-22 | 上海隐冠半导体技术有限公司 | 磁浮装置和微动台 |
| CN117307647B (zh) * | 2023-11-27 | 2024-03-01 | 上海隐冠半导体技术有限公司 | 一种磁弹簧装置及磁弹簧设计方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100026431A1 (en) * | 2008-07-29 | 2010-02-04 | Thales | Magnetically suspended gyroscopic actuator device |
| JP2013121437A (ja) * | 2011-12-12 | 2013-06-20 | Hitachi Medical Corp | 磁気共鳴イメージング装置及びT1ρイメージング法 |
| CN105281531A (zh) * | 2014-07-11 | 2016-01-27 | 上海微电子装备有限公司 | 具有重力补偿功能的音圈电机 |
| CN105988304A (zh) * | 2015-02-28 | 2016-10-05 | 上海微电子装备有限公司 | 一种可调磁浮力重力补偿器 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2596836B2 (ja) * | 1989-08-28 | 1997-04-02 | 信越化学工業株式会社 | 磁場発生装置 |
| DE102010027954A1 (de) * | 2010-04-20 | 2011-10-20 | Dr. Johannes Heidenhain Gmbh | Führung mit passiver Schwerkraftkompensation und vertikal beweglich gelagerte Plattform |
| CN112201611B (zh) * | 2020-12-01 | 2021-03-02 | 上海隐冠半导体技术有限公司 | 磁浮重力补偿装置以及包括该装置的运动台 |
-
2020
- 2020-12-01 CN CN202011379009.XA patent/CN112201611B/zh active Active
-
2021
- 2021-02-10 KR KR1020237015977A patent/KR20230079455A/ko not_active Application Discontinuation
- 2021-02-10 JP JP2023528446A patent/JP2023549227A/ja active Pending
- 2021-02-10 WO PCT/CN2021/076424 patent/WO2022116393A1/zh active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100026431A1 (en) * | 2008-07-29 | 2010-02-04 | Thales | Magnetically suspended gyroscopic actuator device |
| JP2013121437A (ja) * | 2011-12-12 | 2013-06-20 | Hitachi Medical Corp | 磁気共鳴イメージング装置及びT1ρイメージング法 |
| CN105281531A (zh) * | 2014-07-11 | 2016-01-27 | 上海微电子装备有限公司 | 具有重力补偿功能的音圈电机 |
| CN105988304A (zh) * | 2015-02-28 | 2016-10-05 | 上海微电子装备有限公司 | 一种可调磁浮力重力补偿器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023549227A (ja) | 2023-11-22 |
| CN112201611A (zh) | 2021-01-08 |
| WO2022116393A1 (zh) | 2022-06-09 |
| KR20230079455A (ko) | 2023-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112201611B (zh) | 磁浮重力补偿装置以及包括该装置的运动台 | |
| CN214848581U (zh) | 微动台和运动装置 | |
| US9429208B2 (en) | Vibration isolator with zero stiffness whose angle degree of freedom is decoupled with spherical air bearing | |
| CN113471112B (zh) | 磁浮重力补偿装置和微动台 | |
| CN102880013B (zh) | 一种掩模台工作台 | |
| CN109120185B (zh) | 基于特性相消原理的低刚度磁悬浮重力补偿器 | |
| CN102215019B (zh) | 有源型重力补偿电磁支撑装置 | |
| CN103291832A (zh) | 磁悬浮隔振平台 | |
| CN109039004B (zh) | 一种基于Halbach阵列的磁悬浮装置 | |
| US6247889B1 (en) | Multiple-shaft power transmission apparatus and wafer transport arm link | |
| CN112994526B (zh) | 一种磁浮重力补偿器 | |
| CN209774584U (zh) | 一种平面三自由度全柔性并联定位平台 | |
| CN109356960B (zh) | 一种基于压电致动器的机械轴系回转误差主动补偿装置 | |
| CN102710179B (zh) | 主动控制型磁悬浮隔振平台 | |
| CN111687828A (zh) | 一种气电集成驱动装置、末端执行器及机器人 | |
| CN101520606B (zh) | 非接触长行程多自由度纳米精密工作台 | |
| CN112104182B (zh) | 运动装置 | |
| CN113745138B (zh) | 磁浮装置和微动台 | |
| CN113212801A (zh) | 内嵌应变传感的正应力电磁式二维偏转调节装置及方法 | |
| US6888619B2 (en) | Positioning device | |
| CN212265844U (zh) | 一种气电集成驱动装置、末端执行器及机器人 | |
| CN110014418B (zh) | 一种用于精密装配的并联柔性机构 | |
| KR101399830B1 (ko) | 정밀 이송 스테이지 유니트 | |
| CN107664920B (zh) | 电磁导轨装置 | |
| Mu et al. | Design and Optimization of Large Air-Gap Voice Coil Motor for Application in Magnetic Levitation Vibration Isolation Platform |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |