CN112144490A - 一种采用伸缩式拦污栅的河道清理系统 - Google Patents
一种采用伸缩式拦污栅的河道清理系统 Download PDFInfo
- Publication number
- CN112144490A CN112144490A CN202010920172.6A CN202010920172A CN112144490A CN 112144490 A CN112144490 A CN 112144490A CN 202010920172 A CN202010920172 A CN 202010920172A CN 112144490 A CN112144490 A CN 112144490A
- Authority
- CN
- China
- Prior art keywords
- trash rack
- telescopic
- river
- river channel
- cleaning system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02B—HYDRAULIC ENGINEERING
- E02B15/00—Cleaning or keeping clear the surface of open water; Apparatus therefor
- E02B15/04—Devices for cleaning or keeping clear the surface of open water from oil or like floating materials by separating or removing these materials
- E02B15/06—Barriers therefor construed for applying processing agents or for collecting pollutants, e.g. absorbent
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Environmental & Geological Engineering (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Cleaning Or Clearing Of The Surface Of Open Water (AREA)
- Revetment (AREA)
Abstract
本发明公开了一种采用伸缩式拦污栅的河道清理系统,包括操作区,伸缩拦污装置和清理装置,在河道两侧岸堤设置对应的操作区,操作区内安装伸缩拦污装置和清理装置。拦截河道漂浮物后可通过收缩将漂浮垃圾等回收至靠近河岸的位置,清理装置下端耙齿位于伸缩拦污装置下方,且耙齿与收缩后的伸缩拦污装置交错配合,当清理装置提升时,耙齿经过收缩后的伸缩拦污装置间隙之间,梳理清除伸缩拦污装置拦截的河道杂物,方便后期清理人员处理。同时本系统使用太阳能装置提供能源,使河道清理系统运行时更加节能环保,实现无人值守式的全自动河道漂浮物清理收集工作。
Description
技术领域
本发明涉及生态改造工程的技术领域,尤其是涉及一种采用伸缩式拦污栅的河道清理系统。
背景技术
在河道污染及其综合利用上,河道水面漂浮物一直是治理和防范的重点。河道漂浮物作为常见的河道污染物,最直观的危害会造成水面感官变差,并且聚集行动漂浮物如浮萍等漂浮植物都会造成水体缺氧,从而造成水体中水生植物、鱼类、底栖动物、好氧微生物等好氧生物的死亡;浮萍等漂浮植物会造成水面下阳光减少,造成藻类、沉水植物死亡。而且河道漂浮物还会对河道上设置的各种水利设施以及各类船舶造成影响,例如阻塞河道,缠绕水力发电机叶片、船舶桨叶等。
目前大多数水体日常保洁都是采用人工网兜打捞,但该法仅限于打捞垃圾、浮萍等,对浮油、浮泥打捞效果很差。或是采用拦污浮排将水面垃圾拦截于拦污浮排一侧,再通过垃圾打捞船或类似打捞设备进行粗放式打捞容易导致水面垃圾越过浮排至另一侧,二次污染河道。且人工打捞成本较高,导致两次打捞之间间隔时间较长,垃圾长时间浸没于水中存在污染水质的可能。
发明内容
针对上述河道漂浮物治理防范中存在的问题,本发明提供一种能够拦截河道漂浮物,利用伸缩式拦污栅将拦截漂浮物收集至河道边,并进行自动清理的河道清理系统。
本发明解决其技术问题所采用的方案是:一种采用伸缩式拦污栅的河道清理系统,包括操作区,伸缩拦污装置和清理装置,其中河道两侧岸堤设置对应的操作区,两侧操作区之间张拉有钢绞绳,并施加预应力;伸缩拦污装置的两端分别安装在两侧岸堤的操作区内且位于钢绞绳前侧通过挂环挂接在钢绞绳上,展开时横跨河道并支撑在钢绞绳上,收缩时伸缩拦污装置由河道中央向河道两侧收缩折叠,清理装置安装在操作区内伸缩拦污装置对面,用于清理由伸缩拦污装置因收缩折叠夹持的河道漂浮物,其中操作区之间张拉的钢绞绳不少于两条。
进一步,所述伸缩拦污装置折叠后形成多个并列的夹持折叠区,清理装置为提升翻转装置,包括提升轨道、翻转斗和提升机构,翻转斗下端包括有多个并列排布的耙齿,且耙齿排位于伸缩拦污装置下方,翻转斗被提升后各耙齿能竖向穿过所述的夹持折叠区,梳理清除伸缩拦污装置拦截的河道漂浮物,并通过翻转斗将漂浮物收集至河岸上的指定区域。
进一步,所述的伸缩拦污装置包括伸缩拦污栅和传动机构,所述传动机构包括滑轮,牵引绳和电机,其中滑轮安装在操作区固定钢绞绳的一侧,两侧操作区内的滑轮通过环形牵引绳传动连接,其中一侧的伸缩拦污栅位于河道一端通过同步卡套与上侧牵引绳固定连接,另一侧的伸缩拦污栅位于河道一端通过同步卡套与下侧牵引绳固定连接,优选方案是在河道每一侧分上下位置安装一组滑轮,环型牵引绳依次连接每个滑轮,增加牵引绳上下侧之间的距离,其中一个滑轮通过齿轮箱与电机连接,利用齿轮箱放大电机转动的力量,在电机带动下作为主动轮带动拦污装置运行;通过电机的正反转动,两侧的伸缩拦污栅同步展开或收缩。
进一步,所述伸缩拦污栅包括拦污杆和连杆,拦污杆两端铰链连杆构成伸缩拦污栅的一个单元,连杆以拦污杆为轴心转动,多个单元首尾相连形成折叠式伸缩拦污栅,其中连杆Z字形折叠,且连杆之间夹角始终小于180度,拦污杆间隔设置挂环套装在钢绞绳上。
进一步,所述伸缩拦污栅的连杆上安装有挡块,在拦污栅折叠时挡块相顶触,确保拦污栅折叠后的加持区域留有相同的宽度。
进一步,所述电机连接电路控制器,定时启动运行,并通过远近位置开关,控制伸缩拦污栅沿钢绞绳展开和收缩,实现拦污装置自动运行。
进一步,所述升降机构连接控制器,在伸缩拦污装置收缩后启动,通过高低位置开关控制升降机构提升和下降,自动清理拦污装置拦截杂物。
进一步,所述的一种采用伸缩式拦污栅的河道清理系统,通过在河道上布置太阳能发电装置为清理系统提供电力供应,实现装置环保运行。
本发明的有益效果
本发明采用伸缩式拦污栅,拦截河道漂浮物后可通过收缩将漂浮垃圾等回收至靠近河岸的位置,方便河道漂浮垃圾的收集。同时本发明还包括有漂浮物自动清理功能,在伸缩拦污栅将漂浮物收集到河岸边时,清理系统自动将拦污栅拦截的漂浮物,通过前端清理耙像梳子一样将拦截物梳理收集到一起提升至岸墩附近,方便后期清理人员处理。
同时本装置使用太阳能装置提供能源,不仅环保节约还能够提供长期不间断的清理工作,通过设置控制电路,做到长期定时定点的清理,不仅减少了清理人员工作量还提高清理频次,保证了河道的清洁避免了清理不及时造成的河道污染。利用本发明完全可以做到,无人值守式的全自动河道漂浮物清理收集工作。
附图说明
图1:河道清理系统整体外观示意图。
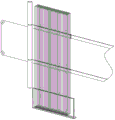
图2:拦污装置收缩时与清理装置配合图。
图3:拦污装置收缩时与清理系统配合俯视图。
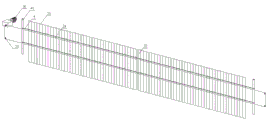
图4:伸缩拦污装置整体结构示意图。
图5:伸缩拦污装置拦污栅的部分结构示意图。
图6:清理装置侧视结构示意图。
图7:清理装置其中一种实施例的结构示意图。
图8:清理装置另一种实施例的结构示意图。
图9:河道清理系统电路控制框视图。
图10:伸缩拦污栅连杆安装挡块的结构示意图。
图11:伸缩拦污栅连杆另一种安装挡块方式的结构示意图。
图中标号:操作区1,伸缩拦污装置2,清理装置3,钢绞绳4,固定柱41,伸缩拦污栅21,牵引绳24,滑轮23,同步卡套22,电机25,拦污杆211,连杆212,提升轨道31、翻转斗32、提升机构33、轨道架301,清理耙302,支撑架303。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:如图1所示的一种采用伸缩式拦污栅的河道清理系统,包括操作区1,伸缩拦污装置2和清理装置3,其中河道两侧岸堤设置对应的操作区1,操作区内安装有固定柱41,两侧固定柱41之间张拉有两道钢绞绳4,并施加预应力;伸缩拦污装置2的两端分别安装在两侧岸堤的操作区1内且位于钢绞绳4前侧通过挂环挂接在钢绞绳4上,展开时横跨河道并支撑在钢绞绳4上,收缩时伸缩拦污装置2由河道中央向河道两侧收缩折叠,清理装置3安装在操作区1内伸缩拦污装置2对面,用于清理由伸缩拦污装置2因收缩折叠夹持的河道漂浮物。
如图2和图6所示伸缩拦污装置2折叠后形成多个并列的夹持折叠区,清理装置3为提升翻转装置,包括提升轨道31、翻转斗32和提升机构33,翻转斗32下端包括由多个并列排布的耙齿,且耙齿排位于伸缩拦污装置2下方,翻转斗32被提升后各耙齿能竖向穿过所述的夹持折叠区。
如图4所示伸缩拦污装置2包括伸缩拦污栅21和传动机构,所述传动机构包括滑轮23,牵引绳24和电机25,其中在操作区1安装有固定柱41的侧壁上安装有一个在上侧,一个在下侧的滑轮组,河道两侧的滑轮组通过环形牵引绳24传动连接,牵引绳24在河道上方的部分分为上段和下段,并且都平行于河道之间的钢绞绳,其中一侧的伸缩拦污栅21位于河道一端通过同步卡套22与上段牵引绳24固定连接,另一侧的伸缩拦污栅21位于河道一端通过同步卡套22与下段牵引绳24固定连接,河道两岸四个滑轮中的一个通过齿轮箱与电机25连接。
如图5所示伸缩拦污栅21包括拦污杆211和连杆212,拦污杆211两端铰链连杆212构成伸缩拦污栅21的一个单元,连杆212以拦污杆231为轴心转动,多个单元首尾相连形成折叠式伸缩拦污栅21,连杆212Z字形折叠,且连杆212之间夹角始终小于180度,拦污杆间隔设置挂环套装在钢绞绳4上。
具体运行原理:拦污栅在河道上展开,通过拦污杆拦截河道漂浮物,当漂浮物积累到一定程度,通过电机带动滑轮和滑轮上的牵引绳转动,牵引绳的上段和下段向相反方向运行,从而带动与牵引绳通过同步卡套连接的两侧拦污栅向河道两岸折叠;在拦污栅折叠完成后,清理装置的提升机构沿提升轨道将翻转斗向上拉升清理拦污栅拦截的杂物,之后翻转斗继续提升翻转,将杂物倾倒至河岸收集处;然后系统反向运行将翻转斗降至原位,拦污栅展开。
实施例2:在实施例1的基础上,如图10所示在拦污栅的连杆212中间安装挡块,由于拦污栅收缩折叠时,可能部分位置折叠速度不同导致折叠程度不一样,此时折叠程度高的位置连杆212上的挡块相互顶触,阻止该位置继续折叠同时其他折叠程度较低的位置继续折叠,最后拦污栅折叠后的夹持折叠区可以保持均匀的宽度。
保持拦污栅折叠折叠区域宽度均匀,清理拦截物时清理装置下方的耙齿能够均匀分布在折叠区域,通过梳理折叠区域将拦截杂物统一提升出水面,清理至事先预留的垃圾回收位置。
实施例3:如图11所示挡块位于栏杆212的靠近端部位置,其原理与前述实施例相同,这里就不在重复描述,该方案的优点在于挡块置于夹持折叠区内侧位置,清理装置下端的耙齿可以探入夹持折叠区更深的位置。
该实施例可以作为实施例2的另一种替代方法,折叠区域的挡块在不影响下方清理装置耙齿的情况下还可以有其他设置方法。并且挡块设置的主要目的是保持拦污栅折叠后折叠区域宽度均匀,在能够达成此目的的前提下,可以有其他不同的实施方式。
实施例4:如图7所示的清理装置3包括轨道架301,清理耙302和支撑架303,其中轨道架301两侧柱设置有轨道槽,轨道槽上端弧形弯曲呈水平状态,清理耙32上端两侧有突出部位卡在轨道架301的轨道内,支撑架303的下端两侧有突出部位卡在轨道架301的轨道内,清理耙302和支撑架303的突起部位在轨道槽内套装轴承,支撑架303位于清理耙302下方,支撑架303的上端部通过转轴连接清理耙302中上部,支撑架303连接升降机构。升降机构采用链条转动方式提升和下降,支撑架303下端与链条连接,通过链条运行带动支撑架303向上提升,支撑架303推动清理耙302沿轨道架301的轨道槽向上滑动。当清理耙302的突出部位经过轨道槽弧形位置时,支撑架303利用杠杆原理将清理耙302下端顶起翻转倾倒清理的河道杂物,杂物清理干净后,链条反转将支撑架303下拉,带动清理耙302回落将装置恢复完成河道拦截清理。
实施例5:在实施例4的基础上,如图8所示升降机构也可以采用液压装置实现清理装置运行。具体方式时,液压装置上端转动连接支撑架303与清理耙302连接转轴,通过液压装置伸缩推动清理耙302和支撑架303沿轨道槽向上移动,当清理耙302的突出部位经过轨道槽弧形位置时,支撑架303利用杠杆原理将清理耙302下端顶起翻转倾倒清理的河道杂物,杂物清理干净后,液压装置收缩将支撑架303下拉,带动清理耙302回落将装置恢复完成河道拦截清理。
实施例6:在前述实施例的基础上,所述伸缩拦污装置和清理装置通过如图9所示的控制器控制运行,远近位置开关控制电机,高低位置开关控制升降机构,实现整个装置的定时自动运行。通过控制器定时启动河道清理系统,利用远近位置开关控制伸缩拦污栅展开和收缩,高低位置开关控制升降机构提升下降,同时防止清理系统过度运行造成损坏。进一步通过在河道上布置太阳能发电装置为清理系统提供电力供应,使河道清理系统运行时更加节能环保。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
Claims (8)
1.一种采用伸缩式拦污栅的河道清理系统,其特征在于,包括操作区(1),伸缩拦污装置(2)和清理装置(3),其中河道两侧岸堤设置对应的操作区(1),两侧操作区(1)之间张拉有钢绞绳(4),并施加预应力;伸缩拦污装置(2)的两端分别安装在两侧岸堤的操作区(1)内且位于钢绞绳(4)前侧通过挂环挂接在钢绞绳(4)上,展开时横跨河道并支撑在钢绞绳(4)上,收缩时伸缩拦污装置(2)由河道中央向河道两侧收缩折叠,清理装置(3)安装在操作区(1)内伸缩拦污装置(2)对面,用于清理由伸缩拦污装置(2)因收缩折叠夹持的河道漂浮物。
2.根据权利要求1所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,伸缩拦污装置(2)折叠后形成多个并列的夹持折叠区,清理装置(3)为提升翻转装置,包括提升轨道(31)、翻转斗(32)和提升机构(33),翻转斗(32)下端包括由多个并列排布的耙齿,且耙齿排位于伸缩拦污装置(2)下方,翻转斗(32)被提升后各耙齿能竖向穿过所述的夹持折叠区。
3.根据权利要求1所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,所述的伸缩拦污装置(2)包括伸缩拦污栅(21)和传动机构,所述传动机构包括滑轮(23),牵引绳(24)和电机(25),其中滑轮(23)安装在操作区(1)固定钢绞绳(4)的一侧,两侧操作区(1)内的滑轮(23)通过环形牵引绳(24)传动连接,其中一侧的伸缩拦污栅(21)位于河道一端通过同步卡套(22)与上侧牵引绳(24)固定连接,另一侧的伸缩拦污栅(21)位于河道一端通过同步卡套(22)与下侧牵引绳(24)固定连接,其中一个滑轮(23)通过齿轮箱与电机(25)连接。
4.根据权利要求2所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,所述提升机构连接控制器,在伸缩拦污装置(2)收缩后启动,通过高低位置开关控制升降机构提升和下降。
5.根据权利要求2所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,所述伸缩拦污栅(21)包括拦污杆(211)和连杆(212),拦污杆(211)两端铰链连杆(212)构成伸缩拦污栅(21)的一个单元,连杆(212)以拦污杆(231)为轴心转动,多个单元首尾相连形成折叠式伸缩拦污栅(21),连杆(212)Z字形折叠,且连杆(212)之间夹角始终小于180度,拦污杆间隔设置挂环套装在钢绞绳(4)上。
6.根据权利要求5所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,所述伸缩拦污装置(2)连接电路控制器,定时启动运行并通过远近位置开关,控制伸缩拦污栅(21)沿钢绞绳(4)展开和折叠。
7.根据权利要求5所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,所述伸缩拦污栅(21)的连杆(212)上安装有挡块。
8.根据权利要求6所述的一种采用伸缩式拦污栅的河道清理系统,其特征在于,所述的一种采用伸缩式拦污栅的河道清理系统,通过在河道上布置太阳能发电装置为清理系统提供电力供应。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010920172.6A CN112144490B (zh) | 2020-09-04 | 2020-09-04 | 一种采用伸缩式拦污栅的河道清理系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010920172.6A CN112144490B (zh) | 2020-09-04 | 2020-09-04 | 一种采用伸缩式拦污栅的河道清理系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112144490A true CN112144490A (zh) | 2020-12-29 |
| CN112144490B CN112144490B (zh) | 2022-04-08 |
Family
ID=73889852
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010920172.6A Active CN112144490B (zh) | 2020-09-04 | 2020-09-04 | 一种采用伸缩式拦污栅的河道清理系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112144490B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114934487A (zh) * | 2022-04-07 | 2022-08-23 | 安徽建筑大学 | 一种伸缩式河道流量调节装置 |
| CN115228174A (zh) * | 2022-09-23 | 2022-10-25 | 珠江水利委员会珠江水利科学研究院 | 基于物联网的蓄能电站上库进出水口清理系统及方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN204080749U (zh) * | 2014-09-28 | 2015-01-07 | 大唐陈村水力发电厂 | 一种径流式水电站柔性拦污系统 |
| US20150152615A1 (en) * | 2013-11-26 | 2015-06-04 | Halo Maritime Defense Systems, Inc. | Energy absorption management for marine barrier and gate systems |
| CN107059818A (zh) * | 2017-05-12 | 2017-08-18 | 三峡大学 | 水动力自净式拦污栅系统 |
| CN107245990A (zh) * | 2017-07-20 | 2017-10-13 | 三峡大学 | 一种水动力自净式拦污栅和拦污方法 |
| CN107558441A (zh) * | 2017-09-12 | 2018-01-09 | 国家电网公司 | 一种拦污栅污物清理装置 |
| CN109537546A (zh) * | 2018-11-19 | 2019-03-29 | 自贡汉丰科技有限公司 | 一种不漏渣的抓斗式格栅清污机 |
| CN109972601A (zh) * | 2019-05-10 | 2019-07-05 | 水利部交通运输部国家能源局南京水利科学研究院 | 一种河道漂浮物拦截自动收集以及水位测量装置 |
| CN209958312U (zh) * | 2019-04-17 | 2020-01-17 | 上海勘测设计研究院有限公司 | 可伸缩的漂浮物拦阻装置 |
-
2020
- 2020-09-04 CN CN202010920172.6A patent/CN112144490B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150152615A1 (en) * | 2013-11-26 | 2015-06-04 | Halo Maritime Defense Systems, Inc. | Energy absorption management for marine barrier and gate systems |
| CN204080749U (zh) * | 2014-09-28 | 2015-01-07 | 大唐陈村水力发电厂 | 一种径流式水电站柔性拦污系统 |
| CN107059818A (zh) * | 2017-05-12 | 2017-08-18 | 三峡大学 | 水动力自净式拦污栅系统 |
| CN107245990A (zh) * | 2017-07-20 | 2017-10-13 | 三峡大学 | 一种水动力自净式拦污栅和拦污方法 |
| CN107558441A (zh) * | 2017-09-12 | 2018-01-09 | 国家电网公司 | 一种拦污栅污物清理装置 |
| CN109537546A (zh) * | 2018-11-19 | 2019-03-29 | 自贡汉丰科技有限公司 | 一种不漏渣的抓斗式格栅清污机 |
| CN209958312U (zh) * | 2019-04-17 | 2020-01-17 | 上海勘测设计研究院有限公司 | 可伸缩的漂浮物拦阻装置 |
| CN109972601A (zh) * | 2019-05-10 | 2019-07-05 | 水利部交通运输部国家能源局南京水利科学研究院 | 一种河道漂浮物拦截自动收集以及水位测量装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114934487A (zh) * | 2022-04-07 | 2022-08-23 | 安徽建筑大学 | 一种伸缩式河道流量调节装置 |
| CN114934487B (zh) * | 2022-04-07 | 2023-06-27 | 安徽建筑大学 | 一种伸缩式河道流量调节装置 |
| CN115228174A (zh) * | 2022-09-23 | 2022-10-25 | 珠江水利委员会珠江水利科学研究院 | 基于物联网的蓄能电站上库进出水口清理系统及方法 |
| CN115228174B (zh) * | 2022-09-23 | 2022-12-02 | 珠江水利委员会珠江水利科学研究院 | 基于物联网的蓄能电站上库进出水口清理系统及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112144490B (zh) | 2022-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112144490B (zh) | 一种采用伸缩式拦污栅的河道清理系统 | |
| CN208647108U (zh) | 水面垃圾清理船的打捞装置 | |
| CN211898257U (zh) | 一种坝口垃圾清理装置 | |
| CN112195894A (zh) | 一种基于太阳能驱动的河道漂浮污物处理装置 | |
| CN207525728U (zh) | 一种用于清理拦污栅上的污物的清理装置 | |
| CN107964933B (zh) | 一种拦污栅污物清理装置 | |
| CN209454951U (zh) | 一种城镇河流生态修复用清理装置 | |
| CN115094853B (zh) | 一种分体式清洁工程船及清洁方法 | |
| CN208280104U (zh) | 一种能自动随水位升降的拦污清污装置 | |
| CN110685261A (zh) | 一种海洋垃圾回收结构及回收方法 | |
| CN106430535A (zh) | 伸展式水体修复装置 | |
| CN215405963U (zh) | 一种水利水电大坝进水口漂浮物打捞装置 | |
| CN106759078B (zh) | 双滚筒破碎清污机 | |
| CN206667335U (zh) | 一种带破碎功能的清污机 | |
| CN2706512Y (zh) | 组合式移动格栅除污装置 | |
| CN211171895U (zh) | 一种海洋垃圾回收结构 | |
| CN212200343U (zh) | 一种环境保护用河道拦截杂物网 | |
| CN113694594A (zh) | 一种核电站用格栅除污机杂物清理装置 | |
| CN211113552U (zh) | 一种水电站库区漂浮物清理装置 | |
| CN210315462U (zh) | 一种水利工程用河道清理装置 | |
| CN213740968U (zh) | 一种河道用往复耙式清污装置 | |
| CN2525127Y (zh) | 移动伸缩式清污机 | |
| CN221052549U (zh) | 水利工程用河道清理装置 | |
| CN215857577U (zh) | 一种水利水电用漂浮物清理装置 | |
| CN215593933U (zh) | 一种拦截漂浮物的拦污栅 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |