CN110914741A - 自由形式棱镜和具有增加视场的头戴式显示器 - Google Patents
自由形式棱镜和具有增加视场的头戴式显示器 Download PDFInfo
- Publication number
- CN110914741A CN110914741A CN201880030598.5A CN201880030598A CN110914741A CN 110914741 A CN110914741 A CN 110914741A CN 201880030598 A CN201880030598 A CN 201880030598A CN 110914741 A CN110914741 A CN 110914741A
- Authority
- CN
- China
- Prior art keywords
- sco
- freeform
- ini
- free
- prism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 26
- 150000001875 compounds Chemical class 0.000 claims abstract description 5
- 230000003287 optical effect Effects 0.000 claims description 115
- 210000001747 pupil Anatomy 0.000 claims description 20
- 239000011248 coating agent Substances 0.000 claims description 6
- 238000000576 coating method Methods 0.000 claims description 6
- 239000002131 composite material Substances 0.000 claims description 4
- 210000003128 head Anatomy 0.000 claims description 4
- 238000004891 communication Methods 0.000 claims description 2
- 238000013461 design Methods 0.000 description 14
- 230000000007 visual effect Effects 0.000 description 12
- 210000004027 cell Anatomy 0.000 description 11
- 238000005516 engineering process Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 6
- 230000004075 alteration Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000008447 perception Effects 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000004438 eyesight Effects 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 206010052143 Ocular discomfort Diseases 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 238000012938 design process Methods 0.000 description 2
- 239000010410 layer Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 2
- 239000004926 polymethyl methacrylate Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000004256 retinal image Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 102100025222 CD63 antigen Human genes 0.000 description 1
- 101000934368 Homo sapiens CD63 antigen Proteins 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 210000001233 cdp Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004637 computerized dynamic posturography Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000007123 defense Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000000295 emission spectrum Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000011229 interlayer Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000003319 supportive effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000004304 visual acuity Effects 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0075—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for altering, e.g. increasing, the depth of field or depth of focus
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0856—Catadioptric systems comprising a refractive element with a reflective surface, the reflection taking place inside the element, e.g. Mangin mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0856—Catadioptric systems comprising a refractive element with a reflective surface, the reflection taking place inside the element, e.g. Mangin mirrors
- G02B17/086—Catadioptric systems comprising a refractive element with a reflective surface, the reflection taking place inside the element, e.g. Mangin mirrors wherein the system is made of a single block of optical material, e.g. solid catadioptric systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B25/00—Eyepieces; Magnifying glasses
- G02B25/001—Eyepieces
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B27/0172—Head mounted characterised by optical features
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/0006—Arrays
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B30/00—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images
- G02B30/10—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images using integral imaging methods
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B5/00—Optical elements other than lenses
- G02B5/04—Prisms
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0123—Head-up displays characterised by optical features comprising devices increasing the field of view
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0127—Head-up displays characterised by optical features comprising devices increasing the depth of field
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lenses (AREA)
- Optical Elements Other Than Lenses (AREA)
- Microscoopes, Condenser (AREA)
- Stereoscopic And Panoramic Photography (AREA)
Abstract
具有复合表面的自由形式波导棱镜,并且其与具有集成成像和中继组的头戴式光场显示器一起使用。
Description
相关申请
本申请要求2017年3月9日提交的美国临时申请No.62/469,104的优先权的权益,该申请的全部内容通过引用并入本文中。
政府许可权
本发明是利用政府支持在NSF授予的拨款No.1422653下完成的。政府在本发明中具有必然权利。
技术领域
本发明一般涉及头戴式显示器的领域,并且更特别地但非排他地涉及基于集成成像(InI)的头戴式显示器。
背景技术
还通常被称为近眼显示器(NED)或头部配戴式显示器(HWD)的头戴式显示器(HMD)近年来已经获得了显著的关注,并且激发了巨大的努力来推动该技术向前以用于广泛的消费者应用。例如,轻量光学透视HMD(OST-HMD)是对于增强现实(AR)应用的关键使能技术之一,其使得能够将数字信息光学叠加到用户对物理世界的直接视图上,并维持对真实世界的透视视觉。宽视场(FOV)的沉浸式HMD是对于虚拟现实(VR)应用的关键使能技术,其使用户沉浸在计算机生成的虚拟世界或对远程真实世界的高分辨率视频捕获中。HMD在游戏、仿真和训练、国防、教育和其他领域中找到了无数的应用。
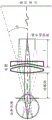
尽管最近朝向VR和AR显示器两者的开发做出了很高的期许和巨大的进展,但是要最大限度地减少在延长时段内佩戴HMD所带来的视觉不适仍然是一个尚未解决的挑战。对视觉不适的关键促成因素之一是由于缺乏呈现正确焦点提示(包括调节提示和视网膜图像模糊效应)的能力所致的转向调节冲突(vergence-accommodation conflicts, VAC)。HMD中的VAC问题源于以下事实:图像源主要是位于距眼睛一固定距离处的2D平面。图1示出了典型的单眼HMD的示意布局,其主要包括作为图像源的2D微型显示器以及目镜,该目镜放大了在微型显示器上呈现的图像,并且形成了出现在距眼睛一固定距离处的虚拟图像。OST-HMD需要将光学组合器(例如,分束器)放置在眼睛前方,以组合虚拟显示和真实场景的光路。常规的HMD(无论是单眼的还是双眼的、透视的或沉浸式的)缺乏呈现针对数字信息的正确焦点提示的能力,该焦点提示可能出现在除与虚拟图像平面相对应的距离以外的其他距离处。因此,常规的HMD未能刺激自然的眼睛调节反应和视网膜模糊效应。HMD中缺乏正确的焦点提示的问题会导致若干视觉提示冲突。例如,常规的立体HMD根据一对二维(2D)透视图像(每只眼睛一个图像)、利用从两个略有不同的观看方位看到的3D场景的双眼视差和其他图片深度提示来刺激对3D空间和形状的感知。因此,常规的立体HMD迫使调节和会聚提示不自然地解耦。针对调节深度的提示由2D图像平面的深度决定,而3D场景的会聚深度由该图像对所呈现的双眼视差决定。显示器呈现的虚拟对象的视网膜图像模糊提示与自然场景创建的提示不匹配。许多研究已经提供了有力的支持性证据:与在常规HMD中不正确呈现的焦点提示有关的这些冲突的视觉提示可能会导致各种视觉伪影和退化的视觉性能。
先前提出的若干种方法可以克服常规立体显示器的缺陷,该常规立体显示器包括体积显示器、超多视图自动立体显示器、基于集成成像的显示器、全息显示器、多焦平面显示器和计算多层显示器。由于它们巨大的硬件复杂性,许多这些不同的显示方法不适合于在HMD系统中实现。另一方面,多焦平面显示器、集成成像和计算多层方法通常被称为光场显示器,并且适合于头戴式应用。它们在HMD中的使用被称为头戴式光场显示器。
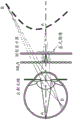
头戴式光场显示器通过对3D场景在不同深度下的投影进行采样,或者对由3D场景明显地发射并且从不同眼睛方位观看到的光线的方向进行采样,来呈现真实的3D场景。它们能够呈现正确或几乎正确的焦点提示,并且能够解决常规VR和AR显示器中的转向调节失配问题。例如,基于集成成像(InI)的显示器通过对由3D场景明显地发射并且从不同眼睛方位观看到的光线的方向进行角度采样来重建3D场景的光场。如图2中图示的,简单的基于InI的显示器通常包括显示面板和2D阵列,该阵列可以是微透镜阵列(MLA)或针孔阵列。显示器呈现一组2D基元图像,每一个基元图像表示3D场景的不同视角。由基元图像中的对应像素发射的锥形射线束相交并且整体地创建对3D场景的感知,该场景似乎发光并且占据3D空间。使用2D阵列的基于InI的显示器允许在水平和垂直方向两者上利用全视差信息来重建3D形状,这是它与使用一维视差障碍或柱面双凸透镜的仅具有水平视差的常规自动立体显示器的主要区别。自其由Lippmann在1908年公布以来,基于InI的技术已被广泛探索,以便既用于捕获真实场景的光场,又用于其在无眼镜自动立体显示器中的使用。它已经以其在低横向和纵向分辨率、狭窄的景深(DOF)和狭窄的视角方面的限制而被知晓。与所有其他非立体3D显示技术相比,InI技术的简单光学架构使其对于与HMD光学系统进行集成并且创建可穿戴光场显示器来说具有吸引力。
然而,像其他基于集成成像的显示和成像技术一样,当前基于InI的HMD方法也受到若干主要限制的影响:(1)狭窄的视场(在对角线上<30°);(2)低横向分辨率(在视觉空间中约为10弧分);(3)低纵向分辨率(在视觉空间中约为0.5屈光度);(4)狭窄的景深(DOF)(对于10弧分的分辨率准则,约为1屈光度);(5)用于无串扰观看的有限人眼窗口(eyebox)(<5 mm);以及(6)观看角度的有限分辨率(每次观看>20弧分)。这些限制不仅为采用该技术作为高性能解决方案创造了显著的障碍,而且还潜在地破坏了该技术用于解决调节会聚矛盾问题的有效性。
因此,本公开详述了基于集成成像的高性能头戴式光场显示器的方法、设计和实施例,其克服了上面总结的现有技术的性能限制的一些方面。
发明内容
响应于上述挑战,在其方面中的一个方面中,本发明提供了一种基于集成成像的高性能HMD,其提供了高横向和纵向分辨率、大景深、无串扰的人眼窗口以及增加的观看角度分辨率。为此,本发明可以提供一种自由形式波导棱镜,包括:第一自由形式光学表面,其被设置成接收光并且将光折射到棱镜的主体中;第二自由形式光学表面,其被设置成接收来自第一自由形式光学表面的折射光,并且将该光反射到棱镜的主体中,以在棱镜的主体内提供中间图像;以及复合自由形式光学表面。该复合自由形式光学表面可以包括:上部自由形式光学表面,其连接到第二自由形式光学表面,并且被布置成使得来自第一自由形式光学表面的光不入射在其上;以及下部自由形式光学表面,其连接到上部自由形式光学表面,其中上部自由形式光学表面被设置在下部自由形式光学表面与第二自由形式光学表面之间。第三自由形式光学表面可以被设置成接收来自中间图像的光,并且将该光全内反射到棱镜的主体中;下部自由形式光学表面可以被设置成接收来自第三自由形式光学表面的反射光,并且以一角度将该光往回反射到第三自由形式表面,该角度允许该光离开棱镜。上部自由形式光学表面可以被设置成使得来自第三自由形式光学表面的光不入射在其上,并且上部和下部自由形式光学表面的坡度在这样的表面相交的位置处可以是相等的。第二自由形式光学表面可以被配置成将光全内反射到棱镜的主体中,并且第三自由形式光学表面可以被配置成将光从第二自由形式光学表面全内反射到棱镜的主体中。对于正交的X-Y-Z坐标系,Z轴可以沿着观看方向,Y轴可以平行于与用户的瞳孔间方向对齐的水平方向,并且X轴可以在与用户的头部取向对齐的垂直方向上。自由形式波导棱镜可以关于水平(Y-Z)平面对称,并且自由形式光学表面可以沿着水平的Y轴偏心并且围绕垂直的X轴旋转。
另外,本发明可以提供一种头戴式显示器集成成像(InI)系统,包括:微观InI单元(微型InI),其被配置成在沿系统的光轴的所选方位处创建所选3D场景的光场;中继单元,其具有设置在其中的变焦元件(VFE),中继单元被设置在光轴上的一位置处,因此所选方位是中继单元的光学共轭,该中继单元被配置成接收由微观InI单元创建的光场;以及自由形式波导棱镜,其根据用于接收来自所述中继单元的光,从而在系统的出射光瞳处提供3D场景的图像,以供头戴式显示系统的用户观看。VFE可以被配置成调整中间图像在棱镜的主体内的位置。该微观InI单元(微型InI)可以被配置成再现具有受约束观看区的3D场景的全视差光场。该中继单元可以包括第一透镜组,并且VFE可以位于第一透镜组的后焦距处。系统的视场可以独立于VFE的光焦度,并且VFE可以被设置在光轴上的一位置处,使得中继单元的复合光焦度独立于VFE的光焦度而维持恒定。微观InI单元可以包括微型显示器,并且通过自由形式波导棱镜的微型显示器的对向视场角(subtended field angle)可以独立于VFE的光焦度而维持恒定。自由形式波导棱镜的焦距可以是27.5 mm,系统的对角线视场可以是35°,并且系统可以具有高达每像素2弧分的光学分辨率。
附图说明
当结合附图阅读时,可以进一步理解本发明的示例性实施例的前述发明内容和以下详细描述,在附图中:
图1示意性地图示了常规的单眼HMD,其中目镜将微型显示器上呈现的图像放大并且形成虚拟显示,该虚拟显示出现在距眼睛的固定远距离处;
图2示意性地图示了基于集成成像的近眼光场显示;
图3A示意性地图示了根据本发明的高性能的基于InI的头戴式光场显示器的示例性配置;
图3B示意性地图示了根据本发明的微型InI单元的示例性配置;
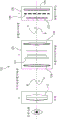
图4A-4D示意性地图示了根据本发明的微型InI单元的示例性配置,该微型InI单元被构造成通过使用以下各项来提供射线方向控制:孔径阵列(图4A);可编程空间光调制器(图4B);具有可控定向发射引擎的显示源(图4C);以及具有空间光调制器作为示例性可控定向发射引擎的背光源(图4D);
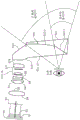
图5示意性地图示了根据本发明的中继组的示例性配置,其中VFE(变焦元件)被放置在与目镜的出射光瞳共轭的方位处;
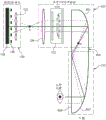
图6A-6D示意性地图示了根据本发明的使用自由形式波导棱镜的光学透视InI-HMD设计的示例性配置,其中变焦中继组的部分被并入到目镜中,其中图6A示出了显示路径布局,图6B示出了透视视图布局,图6C示出了用于扩展的透视视图的波导棱镜的经分段的后表面,并且图6D示出了波导棱镜的后表面的正视图;
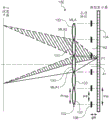
图7A、7B示意性地图示了根据本发明的InI-HMD设计配置的2D光学布局的示例性配置,其中图7A示出了光场显示路径,并且图7B示出了透视路径;
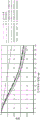
图8A、8B图示了针对轴上视场(图8A)以及针对MLA(微透镜阵列)边缘附近的最远的MLA元件的视场(图8B)的3屈光度的重建中心深度平面(CDP)深度的MTF(调制传递函数)图;
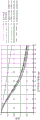
图9A、9B图示了针对到MLA的轴上视场(图9A)以及针对MLA边缘附近的最远的MLA元件的视场(图9B)的2屈光度的重建CDP深度的MTF图;
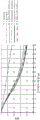
图10A、10B图示了针对到MLA的轴上视场(图10A)以及针对MLA边缘附近的最远的MLA元件的视场(图10B)的0屈光度的重建CDP深度的MTF图;
图11A、11B图示了针对到MLA的轴上视场(图11A)以及针对MLA边缘附近的最远的MLA元件的视场(图11B)的以0.25屈光度从CDP移开的重建点的MTF图;
图12A、12B图示了针对到MLA的轴上视场(图12A)以及针对MLA边缘附近的最远的MLA元件的视场(图12B)的以0.5屈光度从CDP移开的重建点的MTF图;
图13A、图13B图示了针对到MLA的轴上视场(图13A)以及针对MLA边缘附近的最远的MLA元件的视场(图13B)的以0.75屈光度从CDP移开的重建点的MTF图;
图14A、14B图示了针对到MLA的轴上视场(图14A)以及针对MLA边缘附近的最远的MLA元件的视场(图14B)的以1屈光度从CDP移开的重建点的MTF图;以及
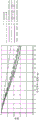
图15图示了针对透视路径FOV 65°×40°的MTF。
具体实施方式
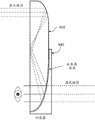
现在参考附图,其中相同的元件始终被相似地编号,如图3A中所示,根据本发明的HMD系统100可以包括三个关键子系统:I)微观InI单元(微型InI)130;II)中继组120,其具有设置在其中的变焦元件(VFE)122,以用于接收来自InI单元130的光场;以及III)目镜光学器件110,以用于接收来自中继组120的经调整的中间3D场景。如图3B中图示的,微型InI单元130可以再现从受约束观看区看到的3D场景的全视差光场,其中全视差光场从水平和垂直观看方向两者提供3D场景的视图视角的改变。受约束观看区在光学上对应于限制微型InI单元130的孔径,并且受约束观看区在光学上与显示系统100的出射光瞳共轭,其中观看者的眼睛被放置在出射光瞳处,以观看重建的3D场景。中继组120创建由微型InI单元130利用其中心深度平面(CDP)的可调方位重建的3D场景的中间图像。取决于目镜110的放大倍数,CDP的方位可以在从约0.5 mm至多达数百毫米的范围内可调,以产生对3D场景的感知,该场景具有从光学无穷远(0屈光度)到近至20 cm(5屈光度)的较大深度范围。中继组120还可以便于翻转重建的3D场景AOB的凹度(concavity)。目镜光学器件110将可调3D光场重新成像到观看者的眼睛中,并且将3D光场的可调深度范围扩大到从数米远到近至几厘米的较大深度体积间隔中。如果需要透视视图,则可以将可以是具有分束器功能的光学器件的透视单元(未示出)与目镜光学器件110光学连通,以使得能够光学地实现对真实世界场景的非遮挡观看。如在图3B中进一步图示的,图3A的微型InI单元130可以包括高分辨率微型显示器和微透镜阵列(MLA)132。MLA 132中的小透镜(lenslet)133的焦距被表示为 ,并且微型显示器134与MLA 132之间的间隙被记为g。一组2D基元图像可以显示在高分辨率微型显示器134上,每个基元图像表示3D场景AOB的不同视角。通过MLA 132,每个基元图像作为空间上不相干的对象进行工作,并且由基元图像中的像素发射的锥形射线束相交,并且整体地创建对3D场景的感知,该场景似乎发光并且占据3D空间。具有深度范围为z0的重建的小型场景的中心深度平面(CDP)通过从MLA 132测量的距离
,并且微型显示器134与MLA 132之间的间隙被记为g。一组2D基元图像可以显示在高分辨率微型显示器134上,每个基元图像表示3D场景AOB的不同视角。通过MLA 132,每个基元图像作为空间上不相干的对象进行工作,并且由基元图像中的像素发射的锥形射线束相交,并且整体地创建对3D场景的感知,该场景似乎发光并且占据3D空间。具有深度范围为z0的重建的小型场景的中心深度平面(CDP)通过从MLA 132测量的距离 而定位。这样的InI系统130允许在水平和垂直方向两者上利用视差信息来重建3D表面形状AOB。重建的3D场景(即,图3B中的曲线AOB)的光场可以经由中继组120光学耦合到目镜光学器件110中以供用户观看。在分辨率优先的InI系统中
而定位。这样的InI系统130允许在水平和垂直方向两者上利用视差信息来重建3D表面形状AOB。重建的3D场景(即,图3B中的曲线AOB)的光场可以经由中继组120光学耦合到目镜光学器件110中以供用户观看。在分辨率优先的InI系统中 ,重建的3D场景的中心深度平面CDP与微型显示器134光学共轭,并且其位置由下式给出:
,重建的3D场景的中心深度平面CDP与微型显示器134光学共轭,并且其位置由下式给出:

其中, 是微型InI单元130的放大率,其可以由下式来表示:
是微型InI单元130的放大率,其可以由下式来表示:

如图3A、4A中所示,可选地,可以在微型显示器134与MLA 132之间插入孔径阵列136,该孔径阵列136包括与MLA 132的间距相匹配的一组射线限制孔径。对应于每个微透镜133的小孔径允许所设计的观看窗内的射线传播通过光学器件并且到达人眼窗口,同时阻挡不想要的射线到达邻近的微透镜133,或者同时阻挡来自相邻基元图像的射线到达微透镜133。例如,孔径A1与A2之间的黑色区阻挡了源自点P1的虚线射线到达与小透镜MLA1邻近的MLA2。这些受阻射线通常是在InI显示系统中观察到的视图串扰和幻影图像的主要来源。从微型显示器134到孔径阵列136的距离被表示为ga,并且孔径开口的直径被表示为pa,它们可以由以下条件约束:


其中 和
和 分别是最大可允许的间隙和孔径大小,pei是基元图像的尺寸,并且pmla是MLA 132的间距。
分别是最大可允许的间隙和孔径大小,pei是基元图像的尺寸,并且pmla是MLA 132的间距。
在使用具有固定孔径大小的孔径阵列136时的一个缺陷是:如果基元图像的大小改变,则其可能会部分地阻挡位于每个基元图像的边缘附近的像素的射线。如图4A中图示的,假定传播通过小透镜MLA1的来自点P1的小部分射线被孔径A1与孔径A2之间的黑色区阻挡,从而引起渐晕效应,使得观看者针对每个基元图像边缘附近的点可能会观察到图像亮度的降低。图4B示出了图4A的配置的替代配置,其中孔径阵列136被可编程的空间光调制器(SLM)135代替,以使得可以动态地适配每个孔径的大小和形状以避免部分阻挡期望的射线。图4C示出了根据本发明的微型InI单元的另一实施例,其中微型显示器134和孔径阵列136被具有可控定向发射的显示源131代替,其中可以精确地控制光发射方向,以使得来自每个像素的射线将仅到达其对应的MLA小透镜133。图4D演示了这种显示源131的一种可能的配置,其中空间光调制器135被插入在具有无方向发射的背光源138与非自发射的微型显示器137之间。可以将空间光调制器135设置成对射线的锥角进行编程和控制,该射线照射微型显示器137并且到达MLA 132。
常规的基于InI的显示系统通常可能会由于空间分辨率的快速退化而遭受有限景深(DOF)的影响,该空间分辨率的快速下降是由于3D重建点的深度从CDP的深度移开。例如,可能需要将3D场景体积限制为小于0.5屈光度,以便在视觉空间中维持3弧分或更好的空间分辨率。为了在维持高空间分辨率的同时呈现大得多的3D场景体积,诸如在图3A的示例性配置中,将具有夹在内部的电控变焦元件122的中继组120插入在微型InI 130与目镜110之间。示例性的VFE 122包括液晶透镜、液晶晶体透镜、可变形反射镜或任何其他可调光学技术,诸如电可调光学技术。通过经由将不同的电压施加到VFE 122来动态地控制中继组120的光焦度 ,中继组120形成由微型InI 130创建的重建的小型3D场景的中间图像A'O'B'。所中继的中间场景的中心深度方位CDP相对于目镜110是轴向(沿光轴)可调的。因此,可以将由目镜110放大的3D虚拟场景的深度体积从非常近(例如,5屈光度)轴向偏移到非常远(例如,0屈光度),同时维持高的横向和纵向分辨率。
,中继组120形成由微型InI 130创建的重建的小型3D场景的中间图像A'O'B'。所中继的中间场景的中心深度方位CDP相对于目镜110是轴向(沿光轴)可调的。因此,可以将由目镜110放大的3D虚拟场景的深度体积从非常近(例如,5屈光度)轴向偏移到非常远(例如,0屈光度),同时维持高的横向和纵向分辨率。
图5示意性地图示了变焦中继组120的示例性配置,该中继组120诸如图3A的中继组120,其包括与微型InI单元130邻近的前透镜组“前中继”126、位于中间的起到系统光阑作用的VFE光学器件122,以及与目镜110邻近的后透镜组“后中继”124。中继组120的复合焦度 由下式给出:
由下式给出:

其中 和
和 分别是前透镜组126、VFE 122和后透镜组124的光焦度。t1和t2是前透镜组126与VFE 122之间,以及VFE 122与后透镜组124之间的空间。z0是前透镜组与微型InI单元130重建的3D场景之间的轴向距离。所中继的中间场景的轴向方位由下式给出:
分别是前透镜组126、VFE 122和后透镜组124的光焦度。t1和t2是前透镜组126与VFE 122之间,以及VFE 122与后透镜组124之间的空间。z0是前透镜组与微型InI单元130重建的3D场景之间的轴向距离。所中继的中间场景的轴向方位由下式给出:

变焦中继系统的横向放大率由下式给出:

假设 是目镜110的光焦度,并且ZRCDP是从所中继的CDP到目镜110的距离,通过目镜110的重建的3D虚拟场景的表观CDP方位由下式给出:
是目镜110的光焦度,并且ZRCDP是从所中继的CDP到目镜110的距离,通过目镜110的重建的3D虚拟场景的表观CDP方位由下式给出:

整个系统通过目镜110的横向放大率由下式给出:

整个系统通过目镜110的视场(FOV)由下式给出:FOV =

其中t3是目镜110与后中继透镜124之间的间隔;zxp是出射光瞳与目镜110之间的间隔;h0是重建的场景的图像高度,并且我们进一步定义 和
和 。
。
当VFE 122被设置成是对目镜110的出射光瞳的光学共轭物(即,hvfe=0)其中,眼睛的入射光瞳被放置成观看显示器134,我们有hvfe=0,并且FOV独立于VFE 122的光焦度。Eq.(9)中的等式被简化成:

如图5中图示的,变焦中继组120的优选实施例是VFE 122在前中继组26的后焦距处的放置(即, ),以使VFE 122成为对目镜110的出射光瞳的光学共轭物(即,hvfe=0)。在该优选实施例的情况下,由Eq.(4)给出的中继组120的复合焦度
),以使VFE 122成为对目镜110的出射光瞳的光学共轭物(即,hvfe=0)。在该优选实施例的情况下,由Eq.(4)给出的中继组120的复合焦度 被简化成:
被简化成:

由Eq.(6)给出的变焦中继系统的横向放大率被简化成:

并且由Eq.(8)给出的整个系统的横向放大率也是这样。
当 并且hvfe=0时,该系统的FOV被进一步简化成:
并且hvfe=0时,该系统的FOV被进一步简化成:

如Eq.(10)至(13)演示的,由于归因于对象空间远心属性的恒定主射线方向,VFE 122以优选方式的谨慎定位确保了中继组120的复合光焦度独立于VFE 122的光焦度而维持恒定。如Eq.(13)进一步演示的,通过目镜110的显示器的对向视场角进一步独立于VFE 122的光焦度而维持恒定。维持中继组120的恒定光焦度有助于虚拟重建的3D场景来实现恒定的视场,而与CDP的焦深无关。因此,在注视附带(gaze-contingent)或时分复用模式中,可以在没有接缝或伪影的情况下视觉上感知到大得多体积的3D场景。值得注意的是,如果满足 ,由Eq.(12)给出的中继组120的横向放大率可以进一步维持恒定,这使得变焦中继组120成为双远心系统。
,由Eq.(12)给出的中继组120的横向放大率可以进一步维持恒定,这使得变焦中继组120成为双远心系统。
图3A中的目镜110可以采取许多不同的形式。例如,为了实现光学透视HMD的紧凑光学设计,可以采用楔形自由形式棱镜,通过该棱镜,由微型InI单元130和中继组120重建的3D场景被放大和观看。为了使得能够实现AR系统的透视能力,可以将自由形式校正器透镜(其中一个表面涂覆有分束器涂层)附接到自由形式棱镜目镜,以校正自由形式棱镜引入的对真实世界场景的视轴偏差和不期望的像差。
在本发明的另一方面,可以将中继组120的部分结合到目镜光学器件110(诸如,自由形式目镜)中,使得可调的中间3D场景形成在自由形式目镜内部。在这样的情境中,目镜可以是例如楔形的自由形式波导棱镜。图6A示意性地图示了由多个自由形式光学表面形成的自由形式的波导状棱镜850的构思。出射光瞳位于如下位置:用户的眼睛被放置在该位置中以观看放大的3D场景。在该设计中,接着VFE 122的传统中继组220的部分被结合到棱镜850中,并且由被包含在标有“具有VFE的中继组”的框内的自由形式波导棱镜850的顶部部分851所实现。从3D点(例如,A)发射的光线首先被中继组220中最靠近的光学元件126折射,并且被透射到棱镜850中,接着被一个或多个自由形式表面反射以创建中间图像(例如,A')。中间图像(例如,A')的轴向方位可由VFE 122调整。由随后的表面进行的多次连续反射,以及通过出射表面855的最终折射允许射线到达系统的出射光瞳。来自不同基元图像的多束射线可能存在,但是它们显然是来自同一对象点而这么存在,这些束中的每一个表示对象的不同视图,从而撞击在出射光瞳的不同位置上。这些射线束整体地重建了位于眼睛前面的虚拟3D点(例如“A”)。不是需要多个光学元件,而是光路在多表面棱镜850内自然折叠,在与使用旋转对称元件的设计相比时,这有助于大幅度地减少光学器件的整体体积和重量。与使用传统的楔形三面棱镜的设计相比,波导状的目镜设计结合了中继功能的部分,与将独立的中继组120与三面棱镜相组合相比,使得能够实现紧凑得多的系统。除了紧凑性的优点外,波导状的多重目镜设计还提供了有利得多的形状因子,这是因为它使得能够实现将剩余的中继组和微型InI单元水平折叠到后颊(temple)侧的能力。与使用楔形棱镜相比,多次折叠不仅产生了重量平衡得多的系统,而且还使得能够实现显著更大的透视FOV。
为了使得能够实现AR系统的透视能力,可以将图6A中的棱镜850的后表面的底部部分853(被标记为目镜部分)涂覆为分束镜,并且可以将包括至少两个自由形式光学表面的自由形式校正器透镜840附接到棱镜850的后表面,以校正自由形式棱镜850引入的对真实世界场景的视轴偏差和不期望的像差。透视的示意性布局在图6B中示出。来自虚拟光场的射线被棱镜850的后表面反射,而来自真实世界场景的射线通过自由形式校正器透镜840和棱镜850透射。自由形式校正器透镜840的前表面与棱镜850的后表面的形状相匹配。当透镜与棱镜850相组合时,可以优化自由形式校正器透镜840的后表面,以最小化被引入到该射线的与真实世界场景的偏移和失真。附加的校正器透镜“补偿器”不会显著地增加整个系统的占位空间和重量。
在本发明的另一方面,图6A中的棱镜850的后表面的底部部分853(被标记为目镜部分)可以被划分成两个区段——区段853-1和区段853-2。如在图6C中示意性地图示的,区段853-1可以是接收由微型InI单元生成的光场的反射表面或部分反射表面。在区段853-1上的分光镜涂层还允许透射来自真实世界场景的光线。区段853-2是透射或半透射表面,其仅接收来自真实世界场景的光线,而它不接收由微型InI单元130生成的光场。图6D示意性地图示了棱镜850的后表面的正视图。两个表面区段853-1和853-2在接收由微型InI单元130重建的3D光场所需的孔径窗口的上边界处相交,并且它们可以由两个单独的自由形式表面制成。将后表面853的底部部分划分成具有不同光路的两个单独的区段853-1、853-2提供了将透视视图的FOV大幅度地扩大以超出显示路径的FOV而不受虚拟显示路径的约束影响的能力。如图6C中所示,可以将自由形式校正器透镜840附接到棱镜850的后表面,以校正自由形式棱镜850引入的对真实世界场景的视轴偏差和不期望的像差。来自虚拟光场的射线被棱镜850的后表面的区段853-1反射,而来自真实世界场景的射线通过棱镜850的区段853-1和853-2以及自由形式校正器透镜840透射。当表面区段853-2与自由形式校正器透镜840组合时,可以优化表面区段853-2以最小化透视视图的视觉伪像。自由形式校正器透镜840的前表面与棱镜850的表面区段853-1和853-2的形状相匹配。当自由形式校正器透镜840与棱镜850组合时,可以优化自由形式校正器透镜840的后表面,以最小化被引入到射线的与真实世界场景的偏移和失真。
根据本发明的又另一方面,图7A示意性地图示了体现图6A的概念性系统的物理系统的光学设计。图7A图示了光场显示路径的2D光学布局,并且图7B示出了透视路径的光学布局。光场显示器的光学系统包括微型InI单元、具有VFE的中继组,以及自由形式波导。中继组的一部分可以合并到波导中。微型InI单元可以包括微型显示器S0、针孔阵列S1和微透镜阵列S2。中继组可以包括四个透镜、商业上可获得的VFE(Optotune公司的电子透镜EL10-30)和两个自由形式表面(表面S19和S20)。自由形式波导棱镜900可以由分别被标记为S19、S20、S21和S22的多个自由形式光学表面形成。在该设计中,可以将接着VFE的传统中继组的部分合并到棱镜900中,并且由表面S19和S20来实现。从3D点(例如,A)发射的光线首先被棱镜900的表面S19折射,接着被表面S20反射以创建中间图像(例如,A')。中间图像(例如,A')的轴向方位可由VFE调整。表面S21'和S22-1的两次或更多次连续反射以及通过表面S21的最终折射允许射线到达系统的出射光瞳。存在来自不同基元图像但是显然来自同一对象点的多束射线,这些束中的每一个表示对象的不同视图,从而撞击在出射光瞳的不同位置上。这些射线束整体地重建了位于眼睛前面的虚拟3D点。需要被波导的表面S21'反射的射线满足全内反射的条件。棱镜900的后表面S22-1、S22-2可以涂覆有镜面涂层,以用于建立沉浸式HMD系统,该系统阻挡了真实世界场景的视图。替换地,如果期望使用辅助透镜的光学透视能力,则表面S22-1可以涂覆有分束涂层,如图7B中所示。
应该注意的是,在由此公开的设计中,Z轴沿着观看方向,Y轴平行于与瞳孔间方向对齐的水平方向,并且X轴在与头部取向对齐的垂直方向上。因此,整个波导系统关于水平(YOZ)平面对称,并且光学表面(S19、S20、S21和S22)沿着水平的Y轴偏心并且围绕垂直的X轴旋转。光路在水平的YOZ平面中折叠。这种布置允许将微型InI单元和变焦中继组安装在用户头部的后颊侧,从而产生平衡且符合人体工程学的系统包装。
表1突出显示了图7A的系统的一些关键性能规格。该系统提供了呈现3D场景的真实3D光场的能力,该3D场景使35°的对角FOV对向(subtend)并且在视觉空间中实现了高达每像素2弧分的光学分辨率。另外,该系统提供了从0到5屈光度可调的较大深度范围,对于单眼显示器而言,其具有约0.1屈光度的较高纵向分辨率。此外,该系统实现了约0.5/mm2的高视图密度,其中视图密度σ被定义为出射光瞳上每单位面积的独特视图的数量,其由下式给出:

其中N是视图的总数,并且AXP是显示系统的出射光瞳的面积。0.5/mm2的视图密度等同于针对在具有0.2屈光度的距离处的对象的近似1弧分的观看角度分辨率。用于无串扰观看的出射光瞳直径(也被称为显示器的人眼窗口)约为6 mm。在该实施例中,出射光瞳直径受到商用VFE的孔径大小的限制,并且如果采用另一种较大孔径的VFE,则出射光瞳直径可以增加。最后,该系统提供了较大的透视FOV,水平地大于65°并且垂直地大于40°。在我们的原型中利用的微型显示器是0.7”有机发光显示器(OLED),其具有8μm彩色像素和1920×1080的像素分辨率(索尼的ECX335A)。然而,光学器件设计本身能够支持不同尺寸的OLED面板或其他类型的微型显示器,诸如具有大于6μm的彩色像素大小的液晶显示器。
表1——一阶系统规格
| 中心深度平面(CDP)的可调深度范围 | <i>0〜5屈光度</i> |
| 视场(虚拟显示) | <i>在CDP处,35°(对角的)或30.5°(水平的)×17.5°(垂直的)</i> |
| 视场(透视) | <i>> 75°(对角的),或 > 65°(水平的)×40°(垂直的)</i> |
| 前中继组的焦距 | 24 mm |
| 后中继组的焦距 | 24 mm |
| 可调透镜的焦距范围 | 75-100 mm(8.5屈光度) |
| 目镜焦距,f<sub>eye</sub> | 27.5 mm |
| 出射光瞳直径 | 6 mm |
| MLA中的小透镜的间距 | 1 mm |
| MLA的F数量 | 3.3 |
表2至表5以光学表面数据的形式提供了图7A的系统的示例性实现方式。表2总结了显示路径的基本参数(单位:mm)。表3至表5提供了定义了非球形光学表面的优化系数。
表2——InI-HMD显示路径的光学规格

采用具有小至6μm的像素的高分辨率微型显示器来实现高分辨率虚拟重建的3D图像。为了实现用于微型InI单元的这样的高分辨率成像,可以具体地设计由非球面形成的微透镜阵列(MLA)。MLA的每一个非球面可以被描述为:

其中z是沿着局部x、y、z坐标系的z轴测量的表面的下陷度,c是顶点曲率,r是径向距离,k是圆锥常数,A至E分别是4阶、6阶、8阶、10阶和12阶变形系数。MLA的材料是PMMA。表3提供了表面S1和S2的系数。
表3——微透镜阵列(MLA)的非球面定义
| S1 | S2 | |
| Y半径 | -5.32 | -1.48 |
| 圆锥常数(K) | 30 | -0.809 |
| 四阶系数(A) | -0.157 | -0.013 |
| 六阶系数(B) | -0.092 | 0.002 |
为了使得能够实现扩大的透视FOV,自由形式波导棱镜900可以由五个自由形式表面形成,分别被标记为表面S19、S20、S21/S21'、S22-1和S22-2。自由形式校正器透镜可以由两个自由形式表面形成,其中前表面与波导棱镜900的表面S22-1和S22-2共享相同的表面规格,并且后表面被表示为表面S23。表面区段S22-1是反射或部分反射表面,其接收由微型InI单元生成的光场。区段S22-1上的分光镜涂层还允许透射来自真实世界场景的光线,以用于透视能力。表面区段S22-2是透射或半透射表面,其仅接收来自真实世界场景的光线,而其不接收由微型InI单元生成的光场。
包括S19、S20、S21/S21'、S22-1和S23的自由形式表面可以用数学方式描述为:

其中z是沿着局部x、y、z坐标系的z轴测量的自由形式表面的下陷度,c是顶点曲率(CUY),r是径向距离,k是圆锥常数,并且Cj是xmyn的系数。波导棱镜和补偿透镜两者的材料均为PMMA。表4至8分别提供了表面S19至S21、S22-1和S23的系数,并且表9提供了每个光学表面的表面参考。
在设计过程期间,在优化了通过由微型InI单元、中继透镜组和表面S19、S20、S21/21'和S22-1组成的棱镜900的光场显示路径之后,获得了表面区段S22-1的规格。首先针对光场显示路径来确定表面S20和S22-1的所需孔径尺寸。然后表面S20、S21和S22-1被输入到3D建模软件(诸如Solidworks®)中,表面S22-2是从该3D建模软件创建的。通过满足以下要求,在建模软件中创建了表面S22-2的形状:(1)它沿着由显示路径定义的表面S22-1的所需孔径的上边界线或在其上方与表面S22-1相交;(2)沿着表面S22-2与S22-2之间的相交线,在表面S22-2上的相交点处的表面坡度与表面S22-1上的那些对应点近似匹配(即便不相等),以确保两个表面似乎是几乎连续的,当它与匹配的自由形式校正器透镜组合时,使得对透视视图的视觉伪影最小化;(3)表面S22-2沿着由显示路径定义的表面S20的所需孔径的下边界线或在其下方与表面S20相交;以及(4)使表面S21与S22-2之间的总体厚度最小化。最后,在3D建模软件中获得表面S22-2的自由形式形状,表面S22-2与表面S19、S20、S21/21'和S22-1进行组合以创建封闭的自由形式波导棱镜。图7B演示了通过上述方法的大幅度扩大的透视FOV。
表4——自由形式表面S19的表面定义
| Y半径 | 31.0417 |
| Y曲率 | 3.2215e-2 |
| 圆锥常数(SCO K|C1) | -30 |
| X(SCO X|C2) | 0 |
| Y(SCO Y|C3) | 0 |
| X**2(SCO X2|C4) | -0.0181749 |
| X*Y(SCO XY|C5) | 0 |
| Y**2(SCO Y2|C6) | -0.03201 |
| X**3(SCO Y3|C7) | 0 |
| X**2*Y(SCO X2Y|C8) | -0.002337 |
| XY**2(SCO XY2|C9) | 0 |
| Y**3(SCO Y3|C10) | -0.00340584 |
| X**4(SCO X4|C11) | 2.214179429e-005 |
| X**3*Y(SCO X3Y|C12) | 0 |
| X**2*Y**2(SCO X2Y2|C13) | -8.34173481e-005 |
| X*Y**3(SCO XY3|C14) | 0 |
| Y**4(SCO Y4|C15) | -0.00012019 |
| X**5(SCO X5|C16) | 0 |
| X**4*Y(SCO X4Y|C17) | -1.9551358e-006 |
| X**3*Y**2(SCO X3Y2|C18) | 0 |
| X**2*Y**3(SCO X2Y3|C19) | -5.7523828e-007 |
| X*Y**4(SCO XY4|C20) | 0 |
| Y**5(SCO Y5|C21) | -2.18978576e-006 |
| X**6(SCO X6|C22) | -1.08276112e-007 |
| X**5*Y(SCO X5Y|C23) | 0 |
| X**4*Y**2(SCO X4Y2|C24) | -3.584137e-007 |
| X**3*Y**3(SCO X3Y3|C25) | 0 |
| X**2*Y**4(SCO X2Y4|C26) | 9.1214167e-008 |
| X*Y**5(SCO XY5|C27) | 0 |
| Y**6(SCO Y6|C28) | -5.28011679e-009 |
| X**7(SCO X7|C29) | 0 |
| X**6*Y(SCO X6Y|C30) | 0 |
| X**5*Y**2(SCO X5Y2|C31) | 0 |
| X**4*Y**3(SCO X4Y3|C32) | 0 |
| X**3*Y**4(SCO X3Y4|C33) | 0 |
| X**2*Y**5(SCO S2Y5|C34) | 0 |
| X*Y**6(SCO XY6|C35) | 0 |
| Y**7(SCO Y7|C36) | 0 |
| X**8(SCO X8|C37) | 0 |
| X**7*Y(SCO X7Y|C38) | 0 |
| X**6*Y**2(SCO X6Y2|C39) | 0 |
| X**5*Y**3(SCO X5Y3|C40) | 0 |
| X**4*Y**4(SCO X4Y4|C41) | 0 |
| X**3*Y**5(SCO X3Y5|C42) | 0 |
| X**2*Y**6(SCO X2Y6|C43) | 0 |
| X*Y**7(SCO XY7|C44) | 0 |
| Y**8(SCO Y8|C45) | 0 |
| X**9(SCO X9|C46) | 0 |
| X**8*Y(SCO X8Y|C47) | 0 |
| X**7*Y**2(SCO X7Y2|C48) | 0 |
| X**6*Y**3(SCO X6Y3|C49) | 0 |
| X**5*Y**4(SCO X5Y4|C50) | 0 |
| X**4*Y**5(SCO X4Y5|C51) | 0 |
| X**3*Y**6(SCO X3Y6|C52) | 0 |
| X**2*Y**7(SCO X2Y7|C53) | 0 |
| X*Y**8(SCO XY8|C54) | 0 |
| Y**9(SCO Y9|C55) | 0 |
| X**10(SCO X10|C56) | 0 |
| X**9*Y(SCO X9Y|C57) | 0 |
| X**8*Y**2(SCO X8Y2|C58) | 0 |
| X**7*Y**3(SCO X7Y3|C59) | 0 |
| X**6*Y**4(SCO X6Y4|C60) | 0 |
| X**5*Y**5(SCO X5Y5|C61) | 0 |
| X**4*Y**6(SCO X4Y6|C62) | 0 |
| X**3*Y**7(SCO X3Y7|C63) | 0 |
| X**2*Y**8(SCO X2Y8|C64) | 0 |
| X*Y**9(SCO XY9|C65) | 0 |
| Y**10(SCO Y10|C66) | 0 |
表5-自由形式表面S20的表面定义
| Y半径 | -54.2094 |
| Y曲率 | -1.845e-2 |
| 圆锥常数(SCO K|C1) | -13.0997 |
| X(SCO X|C2) | 0 |
| Y(SCO Y|C3) | 0 |
| X**2(SCO X2|C4) | 0.0011699 |
| X*Y(SCO XY|C5) | 0 |
| Y**2(SCO Y2|C6) | 0.00676927 |
| X**3(SCO Y3|C7) | 0 |
| X**2*Y(SCO X2Y|C8) | -4.52710486e-005 |
| XY**2(SCO XY2|C9) | 0 |
| Y**3(SCO Y3|C10) | -0.00011081 |
| X**4(SCO X4|C11) | -1.1510996e-005 |
| X**3*Y(SCO X3Y|C12) | 0 |
| X**2*Y**2(SCO X2Y2|C13) | -9.13752747e-006 |
| X*Y**3(SCO XY3|C14) | 0 |
| Y**4(SCO Y4|C15) | -5.5289301e-006 |
| X**5(SCO X5|C16) | 0 |
| X**4*Y(SCO X4Y|C17) | -8.8179807e-007 |
| X**3*Y**2(SCO X3Y2|C18) | 0 |
| X**2*Y**3(SCO X2Y3|C19) | -1.06187669e-006 |
| X*Y**4(SCO XY4|C20) | 0 |
| Y**5(SCO Y5|C21) | -3.38263553e-007 |
| X**6(SCO X6|C22) | 4.77710263e-008 |
| X**5*Y(SCO X5Y|C23) | 0 |
| X**4*Y**2(SCO X4Y2|C24) | 6.21915481e-008 |
| X**3*Y**3(SCO X3Y3|C25) | 0 |
| X**2*Y**4(SCO X2Y4|C26) | 1.43552488e-007 |
| X * Y**5(SCO XY5|C27) | 0 |
| Y**6(SCO Y6|C28) | 5.362211474e-008 |
| X**7(SCO X7|C29) | 0 |
| X**6*Y(SCO X6Y|C30) | 1.193262499e-008 |
| X**5*Y**2(SCO X5Y2|C31) | 0 |
| X**4*Y**3(SCO X4Y3|C32) | -6.01716948e-009 |
| X**3*Y**4(SCO X3Y4|C33) | 0 |
| X**2*Y**5(SCO S2Y5|C34) | -8.19603928e-009 |
| X*Y**6(SCO XY6|C35) | 0 |
| Y**7(SCO Y7|C36) | -2.505270966e-009 |
| X**8(SCO X8|C37) | -8.149026e-010 |
| X**7*Y(SCO X7Y|C38) | 0 |
| X**6*Y**2(SCO X6Y2|C39) | -1.84757517e-010 |
| X**5*Y**3(SCO X5Y3|C40) | 0 |
| X**4*Y**4(SCO X4Y4|C41) | 2.388128888e-010 |
| X**3*Y**5(SCO X3Y5|C42) | 0 |
| X**2*Y**6(SCO X2Y6|C43) | 1.61835037e-010 |
| X*Y**7(SCO XY7|C44) | 0 |
| Y**8(SCO Y8|C45) | 3.966177607e-011 |
| X**9(SCO X9|C46) | 0 |
| X**8*Y(SCO X8Y|C47) | 0 |
| X**7*Y**2(SCO X7Y2|C48) | 0 |
| X**6*Y**3(SCO X6Y3|C49) | 0 |
| X**5*Y**4(SCO X5Y4|C50) | 0 |
| X**4*Y**5(SCO X4Y5|C51) | 0 |
| X**3*Y**6(SCO X3Y6|C52) | 0 |
| X**2*Y**7(SCO X2Y7|C53) | 0 |
| X*Y**8(SCO XY8|C54) | 0 |
| Y**9(SCO Y9|C55) | 0 |
| X**10(SCO X10|C56) | 0 |
| X**9*Y(SCO X9Y|C57) | 0 |
| X**8*Y**2(SCO X8Y2|C58) | 0 |
| X**7*Y**3(SCO X7Y3|C59) | 0 |
| X**6*Y**4(SCO X6Y4|C60) | 0 |
| X**5*Y**5(SCO X5Y5|C61) | 0 |
| X**4*Y**6(SCO X4Y6|C62) | 0 |
| X**3*Y**7(SCO X3Y7|C63) | 0 |
| X**2*Y**8(SCO X2Y8|C64) | 0 |
| X*Y**9(SCO XY9|C65) | 0 |
| Y**10(SCO Y10|C66) | 0 |
表6——自由形式表面S21/S21'的表面定义
| Y半径 | -145.276 |
| Y曲率 | -6.88e-3 |
| 圆锥常数(SCO K|C1) | -1.5654 |
| X(SCO X|C2) | 0 |
| Y(SCO Y|C3) | 0 |
| X**2(SCO X2|C4) | -0.0142277 |
| X*Y(SCO XY|C5) | 0 |
| Y**2(SCO Y2|C6) | 0.00392684 |
| X**3(SCO Y3|C7) | 0 |
| X**2*Y(SCO X2Y|C8) | 0.000646111 |
| XY**2(SCO XY2|C9) | 0 |
| Y**3(SCO Y3|C10) | 2.44041e-005 |
| X**4(SCO X4|C11) | 0.000151 |
| X**3* Y(SCO X3Y|C12) | 0 |
| X**2 * Y**2(SCO X2Y2|C13) | -8.2192e-006 |
| X * Y**3(SCO XY3|C14) | 0 |
| Y**4(SCO Y4|C15) | -3.028061e-007 |
| X**5(SCO X5|C16) | 0 |
| X**4 * Y(SCO X4Y|C17) | -4.13244e-006 |
| X**3 * Y**2(SCO X3Y2|C18) | 0 |
| X**2 * Y**3(SCO X2Y3|C19) | 2.964542e-008 |
| X * Y**4(SCO XY4|C20) | 0 |
| Y**5(SCO Y5|C21) | 1.127521e-009 |
| X**6(SCO X6|C22) | 4.4371187e-008 |
| X**5 * Y(SCO X5Y|C23) | 0 |
| X**4 * Y**2(SCO X4Y2|C24) | 2.7676459e-008 |
| X**3 * Y**3(SCO X3Y3|C25) | 0 |
| X**2 * Y**4(SCO X2Y4|C26) | -3.277381e-011 |
| X * Y**5(SCO XY5|C27) | 0 |
| Y**6(SCO Y6|C28) | -1.4480674e-012 |
| X**7(SCO X7|C29) | 0 |
| X**6 * Y(SCO X6Y|C30) | 0 |
| X**5 * Y**2(SCO X5Y2|C31) | 0 |
| X**4 * Y**3(SCO X4Y3|C32) | 0 |
| X**3 * Y**4(SCO X3Y4|C33) | 0 |
| X**2 * Y**5(SCO S2Y5|C34) | 0 |
| X * Y**6(SCO XY6|C35) | 0 |
| Y**7(SCO Y7|C36) | 0 |
| X**8(SCO X8|C37) | 0 |
| X**7 * Y(SCO X7Y|C38) | 0 |
| X**6 * Y**2(SCO X6Y2|C39) | 0 |
| X**5 * Y**3(SCO X5Y3|C40) | 0 |
| X**4 * Y**4(SCO X4Y4|C41) | 0 |
| X**3 * Y**5(SCO X3Y5|C42) | 0 |
| X**2 * Y**6(SCO X2Y6|C43) | 0 |
| X * Y**7(SCO XY7|C44) | 0 |
| Y**8(SCO Y8|C45) | 0 |
| X**9(SCO X9|C46) | 0 |
| X**8 * Y(SCO X8Y|C47) | 0 |
| X**7 * Y**2(SCO X7Y2|C48) | 0 |
| X**6 * Y**3(SCO X6Y3|C49) | 0 |
| X**5 * Y**4(SCO X5Y4|C50) | 0 |
| X**4 * Y**5(SCO X4Y5|C51) | 0 |
| X**3 * Y**6(SCO X3Y6|C52) | 0 |
| X**2 * Y**7(SCO X2Y7|C53) | 0 |
| X * Y**8(SCO XY8|C54) | 0 |
| Y**9(SCO Y9|C55) | 0 |
| X**10(SCO X10|C56) | 0 |
| X**9 * Y(SCO X9Y|C57) | 0 |
| X**8 * Y**2(SCO X8Y2|C58) | 0 |
| X**7 * Y**3(SCO X7Y3|C59) | 0 |
| X**6 * Y**4(SCO X6Y4|C60) | 0 |
| X**5 * Y**5(SCO X5Y5|C61) | 0 |
| X**4 * Y**6(SCO X4Y6|C62) | 0 |
| X**3 * Y**7(SCO X3Y7|C63) | 0 |
| X**2 * Y**8(SCO X2Y8|C64) | 0 |
| X * Y**9(SCO XY9|C65) | 0 |
| Y**10(SCO Y10|C66) | 0 |
表7——自由形式表面S22-1的表面定义
| Y半径 | -47.3572012741099 |
| Y曲率 | -2.111611e-2 |
| 圆锥常数(SCO K|C1) | -4.32135 |
| X(SCO X|C2) | 0 |
| Y(SCO Y|C3) | 0 |
| X**2(SCO X2|C4) | 0.000908 |
| X * Y(SCO XY|C5) | 0 |
| Y**2(SCO Y2|C6) | 0.005975 |
| X**3(SCO Y3|C7) | 0 |
| X**2 * Y(SCO X2Y|C8) | 4.66442802e-005 |
| XY**2(SCO XY2|C9) | 0 |
| Y**3(SCO Y3|C10) | 0.000101981 |
| X**4(SCO X4|C11) | -5.17499005e-006 |
| X**3 * Y(SCO X3Y|C12) | 0 |
| X**2 * Y**2(SCO X2Y2|C13) | -4.7451096e-006 |
| X * Y**3(SCO XY3|C14) | 0 |
| Y**4(SCO Y4|C15) | -2.4419368e-007 |
| X**5(SCO X5|C16) | 0 |
| X**4 * Y(SCO X4Y|C17) | -1.9769907e-007 |
| X**3 * Y**2(SCO X3Y2|C18) | 0 |
| X**2 * Y**3(SCO X2Y3|C19) | 3.352610999e-008 |
| X * Y**4(SCO XY4|C20) | 0 |
| Y**5(SCO Y5|C21) | 1.61592149e-008 |
| X**6(SCO X6|C22) | 8.08067957e-009 |
| X**5 * Y(SCO X5Y|C23) | 0 |
| X**4 * Y**2(SCO X4Y2|C24) | 7.3374791e-009 |
| X**3 * Y**3(SCO X3Y3|C25) | 0 |
| X**2 * Y**4(SCO X2Y4|C26) | 6.611479e-009 |
| X * Y**5(SCO XY5|C27) | 0 |
| Y**6(SCO Y6|C28) | 9.4341645e-011 |
| X**7(SCO X7|C29) | 0 |
| X**6 * Y(SCO X6Y|C30) | 7.9369652e-010 |
| X**5 * Y**2(SCO X5Y2|C31) | 0 |
| X**4 * Y**3(SCO X4Y3|C32) | 6.27173598e-010 |
| X**3 * Y**4(SCO X3Y4|C33) | 0 |
| X**2 * Y**5(SCO S2Y5|C34) | 1.332732e-010 |
| X * Y**6(SCO XY6|C35) | 0 |
| Y**7(SCO Y7|C36) | -1.5647943e-011 |
| X**8(SCO X8|C37) | -2.12470728e-012 |
| X**7 * Y(SCO X7Y|C38) | 0 |
| X**6 * Y**2(SCO X6Y2|C39) | 3.27745944e-011 |
| X**5 * Y**3(SCO X5Y3|C40) | 0 |
| X**4 * Y**4(SCO X4Y4|C41) | 1.07463864e-011 |
| X**3 * Y**5(SCO X3Y5|C42) | 0 |
| X**2 * Y**6(SCO X2Y6|C43) | 1.347790032e-012 |
| X * Y**7(SCO XY7|C44) | 0 |
| Y**8(SCO Y8|C45) | -9.599201503e-014 |
| X**9(SCO X9|C46) | 0 |
| X**8 * Y(SCO X8Y|C47) | 0 |
| X**7 * Y**2(SCO X7Y2|C48) | 0 |
| X**6 * Y**3(SCO X6Y3|C49) | 0 |
| X**5 * Y**4(SCO X5Y4|C50) | 0 |
| X**4 * Y**5(SCO X4Y5|C51) | 0 |
| X**3 * Y**6(SCO X3Y6|C52) | 0 |
| X**2 * Y**7(SCO X2Y7|C53) | 0 |
| X * Y**8(SCO XY8|C54) | 0 |
| Y**9(SCO Y9|C55) | 0 |
| X**10(SCO X10|C56) | 0 |
| X**9 * Y(SCO X9Y|C57) | 0 |
| X**8 * Y**2(SCO X8Y2|C58) | 0 |
| X**7 * Y**3(SCO X7Y3|C59) | 0 |
| X**6 * Y**4(SCO X6Y4|C60) | 0 |
| X**5 * Y**5(SCO X5Y5|C61) | 0 |
| X**4 * Y**6(SCO X4Y6|C62) | 0 |
| X**3 * Y**7(SCO X3Y7|C63) | 0 |
| X**2 * Y**8(SCO X2Y8|C64) | 0 |
| X * Y**9(SCO XY9|C65) | 0 |
| Y**10(SCO Y10|C66) | 0 |
表8——自由形式表面S23的表面定义
| Y半径 | 149.3605 |
| Y曲率 | 6.695e-3 |
| 圆锥常数(SCO K|C1) | 9.81433 |
| X(SCO X|C2) | 0 |
| Y(SCO Y|C3) | 0 |
| X**2(SCO X2|C4) | -0.024663 |
| X * Y(SCO XY|C5) | 0 |
| Y**2(SCO Y2|C6) | 0.0612683 |
| X**3(SCO Y3|C7) | 0 |
| X**2 * Y(SCO X2Y|C8) | 0.0010723 |
| XY**2(SCO XY2|C9) | 0 |
| Y**3(SCO Y3|C10) | 2.4386556e-005 |
| X**4(SCO X4|C11) | 0.00013098 |
| X**3 * Y(SCO X3Y|C12) | 0 |
| X**2 * Y**2(SCO X2Y2|C13) | -1.2892527e-006 |
| X * Y**3(SCO XY3|C14) | 0 |
| Y**4(SCO Y4|C15) | 2.62995523e-006 |
| X**5(SCO X5|C16) | 0 |
| X**4 * Y(SCO X4Y|C17) | -6.0819504e-006 |
| X**3 * Y**2(SCO X3Y2|C18) | 0 |
| X**2 * Y**3(SCO X2Y3|C19) | -1.3155971e-007 |
| X * Y**4(SCO XY4|C20) | 0 |
| Y**5(SCO Y5|C21) | 4.0503658e-008 |
| X**6(SCO X6|C22) | 1.3439432e-007 |
| X**5 * Y(SCO X5Y|C23) | 0 |
| X**4 * Y**2(SCO X4Y2|C24) | 2.5855823e-008 |
| X**3 * Y**3(SCO X3Y3|C25) | 0 |
| X**2 * Y**4(SCO X2Y4|C26) | -2.699141e-008 |
| X * Y**5(SCO XY5|C27) | 0 |
| Y**6(SCO Y6|C28) | 5.31499927e-009 |
| X**7(SCO X7|C29) | 0 |
| X**6 * Y(SCO X6Y|C30) | -3.738121e-009 |
| X**5 * Y**2(SCO X5Y2|C31) | 0 |
| X**4 * Y**3(SCO X4Y3|C32) | 2.69691705e-012 |
| X**3 * Y**4(SCO X3Y4|C33) | 0 |
| X**2 * Y**5(SCO S2Y5|C34) | 4.84174393e-011 |
| X * Y**6(SCO XY6|C35) | 0 |
| Y**7(SCO Y7|C36) | -1.39752199e-010 |
| X**8(SCO X8|C37) | 4.2757097e-011 |
| X**7 * Y(SCO X7Y|C38) | 0 |
| X**6 * Y**2(SCO X6Y2|C39) | 1.1630807e-011 |
| X**5 * Y**3(SCO X5Y3|C40) | 0 |
| X**4 * Y**4(SCO X4Y4|C41) | 3.4775484e-011 |
| X**3 * Y**5(SCO X3Y5|C42) | 0 |
| X**2 * Y**6(SCO X2Y6|C43) | 3.6136367e-012 |
| X * Y**7(SCO XY7|C44) | 0 |
| Y**8(SCO Y8|C45) | -5.8509308e-013 |
| X**9(SCO X9|C46) | 0 |
| X**8 * Y(SCO X8Y|C47) | 0 |
| X**7 * Y**2(SCO X7Y2|C48) | 0 |
| X**6 * Y**3(SCO X6Y3|C49) | 0 |
| X**5 * Y**4(SCO X5Y4|C50) | 0 |
| X**4 * Y**5(SCO X4Y5|C51) | 0 |
| X**3 * Y**6(SCO X3Y6|C52) | 0 |
| X**2 * Y**7(SCO X2Y7|C53) | 0 |
| X * Y**8(SCO XY8|C54) | 0 |
| Y**9(SCO Y9|C55) | 0 |
| X**10(SCO X10|C56) | 0 |
| X**9 * Y(SCO X9Y|C57) | 0 |
| X**8 * Y**2(SCO X8Y2|C58) | 0 |
| X**7 * Y**3(SCO X7Y3|C59) | 0 |
| X**6 * Y**4(SCO X6Y4|C60) | 0 |
| X**5 * Y**5(SCO X5Y5|C61) | 0 |
| X**4 * Y**6(SCO X4Y6|C62) | 0 |
| X**3 * Y**7(SCO X3Y7|C63) | 0 |
| X**2 * Y**8(SCO X2Y8|C64) | 0 |
| X * Y**9(SCO XY9|C65) | 0 |
| Y**10(SCO Y10|C66) | 0 |
表9——全局坐标系中的局部表面参考的定义

在设计过程期间,选择了三个代表性波长465 nm、550 nm和630 nm,它们对应于所选OLED微型显示器内的蓝色、绿色和红色发射器的峰值发射光谱。对MLA中的总共21个小透镜进行采样,其中每个小透镜表示9个元素图像点,它们加起来总共是189个视场样本。为了评估图像质量,在系统的出射光瞳(观看窗口)处放置了具有与目镜相同的焦度的理想透镜,这导致最终图像的截止频率为20.83 lp/mm,其受到微型显示器的像素大小限制。在三种设计波长的代表性视场角下评估了所设计系统的光学性能。通过改变可调透镜VFE的焦度,可以在没有光学性能的明显退化的情况下在大范围内(例如,从0到3屈光度)使中心深度平面轴向偏移。图8至图10分别标绘了针对在3、1和0屈光度的深度处设置的CDP上重建的点的多色调制传递函数(MTF)。针对每个CDP方位,标绘了两组MTF,一组针对与轴上MLA相对应的视场,而一组针对与边缘附近的最远的MLA相对应的视场。
另一方面,当重建的图像针对特定的可调状态而从中心深度平面移开时,评估3D重建点的图像质量如何退化也同等重要。这可以通过在不改变可调透镜的焦度的情况下使中心深度平面偏移小的距离量来评估。图11至图14分别标绘了针对以0.25、0.5、0.75和1屈光度从CDP移开的重建点的多色MTF。针对每个深度,标绘了两组MTF,一组针对与轴上MLA相对应的视场,而一组针对与边缘附近的最远的MLA相对应的视场。
图15标绘了针对65°×40°FOV的多色MTF。跨整个FOV,透视路径实现了:在30个周期/度的频率下达到50%以上的平均MTF值(对应于20/20的正常视觉);以及在60个周期/度的频率下达到将近20%的平均MTF值(对应于20/10的视觉或0.5弧分的视敏度)。
Claims (27)
1.一种自由形式波导棱镜,包括:
第一自由形式光学表面,其被设置成接收光并且将光折射到所述棱镜的主体中;
第二自由形式光学表面,其被设置成接收来自所述第一自由形式光学表面的折射光,并且将所述光反射到所述棱镜的主体中,以在所述棱镜的主体内提供中间图像;
复合自由形式光学表面,包括:
上部自由形式光学表面,其连接到所述第二自由形式光学表面,并且被布置成使得来自所述第一自由形式光学表面的光不入射在其上;以及
下部自由形式光学表面,其连接到所述上部自由形式光学表面,其中所述上部自由形式光学表面被设置在所述下部自由形式光学表面与第二自由形式光学表面之间。
2.根据权利要求1所述的自由形式波导棱镜,包括第三自由形式光学表面,其被设置成接收来自所述中间图像的光,并且将所述光全内反射到所述棱镜的主体中。
3.根据权利要求2所述的自由形式波导棱镜,其中所述下部自由形式光学表面被设置成接收来自所述第三自由形式光学表面的反射光,并且以一角度将所述光往回反射到所述第三自由形式表面,所述角度允许所述光离开所述棱镜。
4.根据权利要求2或3所述的自由形式波导棱镜,其中所述上部自由形式光学表面被设置成使得来自所述第三自由形式光学表面的光不入射在其上。
5.根据前述权利要求中任一项所述的自由形式波导棱镜,其中所述上部和下部自由形式光学表面的坡度在这样的表面相交的位置处可以是相等的。
6.根据前述权利要求中任一项所述的自由形式波导棱镜,其中所述第二自由形式光学表面被配置成将光全内反射到所述棱镜的主体中。
7.根据前述权利要求中任一项所述的自由形式波导棱镜,其中所述第三自由形式光学表面被配置成将来自所述第二自由形式光学表面的光全内反射到所述棱镜的主体中。
8.根据前述权利要求中任一项所述的自由形式波导棱镜,其中所述下部自由形式光学表面被镜面化。
9.根据前述权利要求中任一项所述的自由形式波导棱镜,其中所述下部自由形式光学表面包括分束涂层。
10.根据前述权利要求中任一项所述的自由形式波导棱镜,其中对于正交的X-Y-Z坐标系,Z轴沿着观看方向,Y轴平行于与用户的瞳孔间方向对齐的水平方向,并且X轴在与用户的头部取向对齐的垂直方向上。
11.根据权利要求7所述的自由形式波导棱镜,其中所述自由形式波导棱镜关于水平(Y-Z)平面对称。
12.根据权利要求7或8所述的自由形式波导棱镜,其中所述自由形式光学表面沿着水平的Y轴偏心并且围绕垂直的X轴旋转。
13.根据前述权利要求中任一项所述的自由形式波导棱镜,其中所述自由形式光学表面中的任一个的形状由下式给出:

其中z是沿着局部x、y、z坐标系的z轴测量的自由形式表面的下陷度,c是顶点曲率(CUY),r是径向距离,k是圆锥常数,并且C是xmyn的系数。
14.一种头戴式显示器集成成像(InI)系统,包括:
微观InI单元(微型InI),其被配置成在沿所述系统的光轴的所选方位处创建所选3D场景的光场;
中继单元,其具有设置在其中的变焦元件(VFE),所述中继单元被设置在所述光轴上的一位置处,因此所选方位是所述中继单元的光学共轭,所述中继单元被配置成接收由所述微观InI单元创建的光场;以及
根据前述权利要求中任一项所述的自由形式波导棱镜,以用于接收来自所述中继单元的光,从而在所述系统的出射光瞳处提供3D场景的图像,以供头戴式显示系统的用户观看,
其中,所述VFE被配置成调整所述中间图像在所述棱镜的主体内的位置。
15.根据权利要求14所述的头戴式显示器集成成像(InI)系统,其中所述微观InI单元(微型InI)被配置成再现具有受约束观看区的3D场景的全视差光场。
16.根据前述权利要求中任一项所述的自由形式波导棱镜或头戴式显示器集成成像(InI)系统,包括与所述自由形式波导棱镜光学连通的透视单元,以将真实世界的视图透射到所述自由形式波导棱镜。
17.根据权利要求16所述的自由形式波导棱镜或头戴式显示器集成成像(InI)系统,其中所述透视单元具有匹配所述自由形式波导棱镜的后表面的形状的前表面。
18.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述中继单元包括第一透镜组,并且其中所述VFE位于所述第一透镜组的后焦距处。
19.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述系统的视场独立于所述VFE的光焦度。
20.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述VFE被设置在所述光轴上的一位置处,使得所述中继单元的复合光焦度独立于所述VFE的光焦度而维持恒定。
21.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述微观InI单元包括微型显示器,并且通过所述自由形式波导棱镜的微型显示器的对向视场角独立于所述VFE的光焦度而维持恒定。
22.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述中继单元被配置成将沿着通过目镜的重建的3D虚拟场景的方位的光轴的方位调整高达5屈光度。
23.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述VFE的焦距范围为75-100 mm。
24.根据前述权利要求中任一项所述的自由形式波导棱镜或头戴式显示器集成成像(InI)系统,其中所述自由形式波导棱镜的焦距为27.5 mm。
25.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述系统的对角视场为35°。
26.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述系统具有高达每像素2弧分的光学分辨率。
27.根据前述权利要求中任一项所述的头戴式显示器集成成像(InI)系统,其中所述微观InI单元包括微透镜阵列,所述微透镜阵列的至少一个透镜表面由以下等式表示:

其中z是沿着局部x、y、z坐标系的z轴测量的表面的下陷度,c是顶点曲率,r是径向距离,k是圆锥常数,A至E分别是4阶、6阶、8阶、10阶和12阶变形系数。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762469104P | 2017-03-09 | 2017-03-09 | |
| US62/469104 | 2017-03-09 | ||
| PCT/US2018/021098 WO2018165123A1 (en) | 2017-03-09 | 2018-03-06 | Freeform prism and head-mounted display with increased field of view |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110914741A true CN110914741A (zh) | 2020-03-24 |
Family
ID=63447895
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880030598.5A Pending CN110914741A (zh) | 2017-03-09 | 2018-03-06 | 自由形式棱镜和具有增加视场的头戴式显示器 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US20200386993A1 (zh) |
| EP (1) | EP3593200A4 (zh) |
| JP (2) | JP2020514810A (zh) |
| KR (1) | KR20190131510A (zh) |
| CN (1) | CN110914741A (zh) |
| AU (1) | AU2018231087A1 (zh) |
| CA (1) | CA3055374A1 (zh) |
| IL (1) | IL269044A (zh) |
| WO (1) | WO2018165123A1 (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112882248A (zh) * | 2021-01-15 | 2021-06-01 | 中山大学 | 一种光束发散角偏转孔径二次约束的显示模组 |
| WO2023284353A1 (zh) * | 2021-07-16 | 2023-01-19 | Oppo广东移动通信有限公司 | 镜头、投影光机以及近眼显示设备 |
| US11592650B2 (en) | 2008-01-22 | 2023-02-28 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Head-mounted projection display using reflective microdisplays |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201800173D0 (en) * | 2018-01-05 | 2018-02-21 | Yoentem Ali Oezguer | Multi-angle light capture display system |
| KR102597609B1 (ko) * | 2018-11-09 | 2023-11-02 | 스냅 인코포레이티드 | 네 개의 구면 유리 엘리먼트들을 갖는 투사 렌즈 |
| WO2021061456A1 (en) * | 2019-09-25 | 2021-04-01 | Akalana Management Llc | Optical systems for providing field angle dependent pupil sizes within a waveguide |
| KR102498191B1 (ko) * | 2020-06-02 | 2023-02-10 | 주식회사 피앤씨솔루션 | 반사면을 포함하는 증강현실용 광학계 및 이를 이용한 머리 착용형 디스플레이 장치 |
| US11947134B2 (en) | 2021-01-22 | 2024-04-02 | National Taiwan University | Device of generating 3D light-field image |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012032684A1 (ja) * | 2010-09-06 | 2012-03-15 | オリンパス株式会社 | プリズム光学系、プリズム光学系を用いた画像表示装置及び撮像装置 |
| US20140071539A1 (en) * | 2012-09-11 | 2014-03-13 | Magic Leap, Inc. | Ergonomic head mounted display device and optical system |
| CN103688208A (zh) * | 2010-12-24 | 2014-03-26 | 奇跃公司 | 人体工程学头戴式显示设备和光学系统 |
| CN104204904A (zh) * | 2012-01-24 | 2014-12-10 | 亚利桑那大学评议会 | 紧凑式眼睛跟踪头戴式显示器 |
| US20150177445A1 (en) * | 2013-12-24 | 2015-06-25 | Seiko Epson Corporation | Light guide device, virtual image display appratus, and method for manufacturing light guide device |
| WO2015134738A1 (en) * | 2014-03-05 | 2015-09-11 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Wearable 3d augmented reality display |
| US20160011419A1 (en) * | 2010-12-24 | 2016-01-14 | Magic Leap, Inc. | Methods and systems for displaying stereoscopy with a freeform optical system with addressable focus for virtual and augmented reality |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4727025B2 (ja) * | 2000-08-01 | 2011-07-20 | オリンパス株式会社 | 画像表示装置 |
| JP4035476B2 (ja) * | 2003-04-23 | 2008-01-23 | キヤノン株式会社 | 走査光学系、走査型画像表示装置および画像表示システム |
| WO2010123934A1 (en) * | 2009-04-20 | 2010-10-28 | The Arizona Board Of Regents On Behalf Of The University Of Arizona | Optical see-through free-form head-mounted display |
| DE102010040030B4 (de) * | 2010-08-31 | 2017-02-02 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Objektiv und Bildaufnahmesystem |
| JP6111635B2 (ja) * | 2012-02-24 | 2017-04-12 | セイコーエプソン株式会社 | 虚像表示装置 |
| KR102344903B1 (ko) * | 2012-10-18 | 2021-12-28 | 더 아리조나 보드 오브 리전츠 온 비핼프 오브 더 유니버시티 오브 아리조나 | 어드레스 가능 포커스 큐를 갖는 입체적 디스플레이 |
| JP6221223B2 (ja) * | 2012-11-16 | 2017-11-01 | セイコーエプソン株式会社 | 光学部材及び虚像表示装置 |
| US9857591B2 (en) * | 2014-05-30 | 2018-01-02 | Magic Leap, Inc. | Methods and system for creating focal planes in virtual and augmented reality |
| CA2950425C (en) * | 2014-05-30 | 2022-01-25 | Magic Leap, Inc. | Methods and systems for displaying stereoscopy with a freeform optical system with addressable focus for virtual and augmented reality |
-
2018
- 2018-03-06 KR KR1020197029321A patent/KR20190131510A/ko not_active Application Discontinuation
- 2018-03-06 CA CA3055374A patent/CA3055374A1/en active Pending
- 2018-03-06 CN CN201880030598.5A patent/CN110914741A/zh active Pending
- 2018-03-06 US US16/491,842 patent/US20200386993A1/en active Pending
- 2018-03-06 JP JP2019548958A patent/JP2020514810A/ja active Pending
- 2018-03-06 AU AU2018231087A patent/AU2018231087A1/en not_active Abandoned
- 2018-03-06 EP EP18764738.3A patent/EP3593200A4/en active Pending
- 2018-03-06 WO PCT/US2018/021098 patent/WO2018165123A1/en unknown
-
2019
- 2019-09-01 IL IL26904419A patent/IL269044A/en unknown
-
2023
- 2023-09-30 JP JP2023170988A patent/JP2024001099A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012032684A1 (ja) * | 2010-09-06 | 2012-03-15 | オリンパス株式会社 | プリズム光学系、プリズム光学系を用いた画像表示装置及び撮像装置 |
| CN103688208A (zh) * | 2010-12-24 | 2014-03-26 | 奇跃公司 | 人体工程学头戴式显示设备和光学系统 |
| US20160011419A1 (en) * | 2010-12-24 | 2016-01-14 | Magic Leap, Inc. | Methods and systems for displaying stereoscopy with a freeform optical system with addressable focus for virtual and augmented reality |
| CN104204904A (zh) * | 2012-01-24 | 2014-12-10 | 亚利桑那大学评议会 | 紧凑式眼睛跟踪头戴式显示器 |
| US20140071539A1 (en) * | 2012-09-11 | 2014-03-13 | Magic Leap, Inc. | Ergonomic head mounted display device and optical system |
| US20150177445A1 (en) * | 2013-12-24 | 2015-06-25 | Seiko Epson Corporation | Light guide device, virtual image display appratus, and method for manufacturing light guide device |
| WO2015134738A1 (en) * | 2014-03-05 | 2015-09-11 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Wearable 3d augmented reality display |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11592650B2 (en) | 2008-01-22 | 2023-02-28 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Head-mounted projection display using reflective microdisplays |
| CN112882248A (zh) * | 2021-01-15 | 2021-06-01 | 中山大学 | 一种光束发散角偏转孔径二次约束的显示模组 |
| WO2023284353A1 (zh) * | 2021-07-16 | 2023-01-19 | Oppo广东移动通信有限公司 | 镜头、投影光机以及近眼显示设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024001099A (ja) | 2024-01-09 |
| WO2018165123A1 (en) | 2018-09-13 |
| EP3593200A1 (en) | 2020-01-15 |
| IL269044A (en) | 2019-10-31 |
| CA3055374A1 (en) | 2018-09-13 |
| US20200386993A1 (en) | 2020-12-10 |
| AU2018231087A1 (en) | 2019-09-26 |
| EP3593200A4 (en) | 2020-12-23 |
| KR20190131510A (ko) | 2019-11-26 |
| JP2020514810A (ja) | 2020-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110770633B (zh) | 具有集成成像和波导棱镜的头戴式光场显示器 | |
| US11546575B2 (en) | Methods of rendering light field images for integral-imaging-based light field display | |
| CN110678799B (zh) | 具有集成成像和中继光学器件的头戴式光场显示器 | |
| CN110914741A (zh) | 自由形式棱镜和具有增加视场的头戴式显示器 | |
| JP2020024438A (ja) | ウェアラブル3d拡張現実ディスプレイ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |