CN109129067B - Intelligent grinding machine equipment capable of automatically detecting grinding - Google Patents
Intelligent grinding machine equipment capable of automatically detecting grinding Download PDFInfo
- Publication number
- CN109129067B CN109129067B CN201710500008.8A CN201710500008A CN109129067B CN 109129067 B CN109129067 B CN 109129067B CN 201710500008 A CN201710500008 A CN 201710500008A CN 109129067 B CN109129067 B CN 109129067B
- Authority
- CN
- China
- Prior art keywords
- grinding
- intelligent
- unit
- grinding wheel
- surface grinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B7/00—Machines or devices designed for grinding plane surfaces on work, including polishing plane glass surfaces; Accessories therefor
- B24B7/02—Machines or devices designed for grinding plane surfaces on work, including polishing plane glass surfaces; Accessories therefor involving a reciprocatingly-moved work-table
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B49/00—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation
- B24B49/16—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation taking regard of the load
- B24B49/165—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation taking regard of the load for grinding tyres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B51/00—Arrangements for automatic control of a series of individual steps in grinding a workpiece
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
Abstract
An intelligent grinding machine for automatically detecting grinding, which is used for processing a workpiece, comprises: a flat grinder machine; the electric control device is arranged at a preset position of the surface grinder and is used for controlling the whole operation of the surface grinder; a grinding wheel unit assembled on the surface grinder for grinding the workpiece; and an intelligent processing control system, which is arranged at any preset position of the surface grinder, is coupled with the control device and is electrically connected with the control device, and the intelligent processing control system is mainly used for grinding the workpiece by the grinding wheel unit through the application of the load force and cutting force parameters generated when the grinding wheel unit and the workpiece are ground, so that the stroke distance of the worktable of the surface grinder when moving along the X axis is shortened, a better grinding path is generated, the grinding time is reduced, and the working efficiency is improved.
Description
Technical Field
The invention relates to a grinding tool, in particular to an intelligent grinding machine device capable of automatically detecting grinding, which can automatically detect the overall appearance contour of various workpieces to grind during processing, and can generate an optimal grinding path by the stroke distance when a workbench of a surface grinding machine moves along an X axis; the grinding stroke distance is shortened to improve the working efficiency.
Background
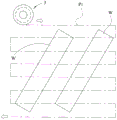
In the current machining operation, a grinding machine is a common machine tool for precision machining, which is a machine tool for grinding the redundant excess material of a workpiece by using a grinding tool to obtain a required shape, size and precision machining surface, please refer to fig. 11 and 12, which is a common grinding machine 7, the grinding machine 7 mainly comprises a base 71, the base 71 is provided with a saddle 711 horizontally arranged on the top surface of the base 71 and moving along a Z axis (front and back), an upright column 712 vertically arranged on the top surface of the base 71, a spindle headstock 713 arranged on the upright column 712 and moving along a Y axis (up and down), and a grinding wheel 714 arranged on the spindle headstock 713 and rotating; and a table 72 moving along the X-axis (left and right) for placing a workpiece W thereon, wherein the grinding wheel 714 can move along the column 712 along the Y-axis relative to the table 72, and the saddle 711 can move back and forth relative to the column 712 and the table 72 can move left and right relative to the column 712, so as to grind a surface of the workpiece W on the table 72.
As described above, the grinding machine 7 usually uses the grinding wheel 714 rotating at a high speed to grind the workpiece W, and the workpiece W is disposed on the worktable 72, and the worktable 72 is automatically driven to reciprocate along the X-axis (left and right), and the grinding wheel 714 rotating at a high speed is used to grind the workpiece W, so that the workpiece W can obtain a desired shape and size, and the workpiece W has the advantages of rapid processing, good surface roughness, precise size, etc., but the workpiece W may be disposed on the worktable 72 at different angles during the grinding process; alternatively, when the overall contour of the workpiece W is out of specification, relatively, under a preset standard polishing path P1, when the table 72 is reciprocally displaced along the X axis (left and right), it appears that the stroke of the standard polishing path P1 is longer, which results in a longer time for polishing and a lower throughput, which is not economical, and therefore, for the development of the industry that needs to be changed from time to time, how to make the tool function achieve more diversified use efficiency under the application of the automated computer control still leaves a great room for improvement.
In view of the above, the present inventors have made extensive and intensive observations and studies based on many years of experience in this field, and have applied the present invention to provide a method for reasonably and effectively improving the above-mentioned disadvantages.
Disclosure of Invention
The main purposes of the invention are as follows: provides a grinding effect which can automatically detect the overall appearance contour of various workpieces during processing, and generates an optimal grinding path by the stroke distance when the worktable of the surface grinder moves along the X axis; so as to shorten the polishing stroke distance and improve the working efficiency.
To achieve the above object, the present invention provides an intelligent grinding machine for automatically detecting grinding, which is used for processing at least one workpiece to perform grinding operation, and comprises:
a flat grinder includes a base unit; the workbench is arranged above the base unit, moves along the X axis and is used for carrying the workpiece; a grinding unit, which is provided with a spindle seat and is arranged at any preset position of the surface grinder, wherein the front end of the spindle seat extends out of a grinding wheel group setting end; the rear end part of the spindle seat is provided with a spindle motor which drives the setting end of the grinding wheel group to rotate for 360 degrees through the operation of the spindle motor;
the electric control device is arranged at any preset position of the surface grinder, and a controller is arranged in the electric control device and used for controlling the integral operation of the surface grinder;
the grinding wheel unit is assembled at the grinding wheel group arranging end arranged on the main shaft seat of the grinding unit of the surface grinder, and drives the grinding wheel unit to be in a rotating state through the integral operation of the main shaft seat of the grinding unit so as to grind the workpiece; and
an intelligent processing control system, which is arranged at any preset position of the surface grinder, is coupled with the controller of the electric control device and is electrically connected with the controller, and is provided with an intelligent encoder and an intelligent driver; wherein:
the intelligent encoder is arranged at any preset position of the surface grinder, is coupled with a spindle motor of the grinding unit and is electrically connected with the spindle motor, and is in a synchronous rotating state with the grinding wheel unit; the intelligent encoder is used for editing the whole processing sequence or parameter setting program of the intelligent processing control system; and
the intelligent driver is arranged in the electric control device, is coupled between the controller and the intelligent encoder and is electrically connected with the controller and the intelligent encoder, and is used for receiving the instruction transmitted by the controller and the intelligent encoder; the controller is used for executing the instructions transmitted by the intelligent encoder to control the whole operation of the surface grinder;
therefore, the workpiece is arranged on the workbench of the surface grinder, the intelligent driver is used for receiving the instruction transmitted by the controller and the intelligent encoder and driving the surface grinder to operate integrally, the stroke distance of the workbench of the surface grinder when moving along the X axis is used for generating a standard grinding path for the grinding wheel unit to achieve grinding operation, the application of the load force and cutting force parameters generated when the grinding wheel unit and the workpiece are ground is mainly utilized, when the load force and cutting force parameters generated when the grinding wheel unit carries out surface grinding processing on the workpiece reach a preset parameter, the processing sequence or parameter setting program edited by the intelligent encoder of the intelligent processing control system is automatically executed, so as to shorten the stroke distance of the workbench of the surface grinder when moving along the X axis and generate an optimal grinding path for the grinding wheel unit to achieve grinding operation, the grinding stroke distance is shortened to improve the working efficiency.
The invention has the following effects: the workpiece is arranged on a workbench of the surface grinder, the intelligent driver is used for receiving the instruction transmitted by the controller and the intelligent encoder, and the surface grinder is driven to operate integrally, so that a standard grinding path is generated by the stroke distance of the workbench of the surface grinder when moving along the X axis for the grinding wheel unit to achieve grinding operation, even, the image sensing unit is matched for photographing when the grinding wheel unit and the workpieces are ground, and parameter information obtained by photographing is fed back to the controller of the electric control device for image operation processing, the load force and cutting force parameters generated when the grinding wheel unit and the workpieces are ground are mainly applied, when the load force and cutting force parameters generated when the grinding wheel unit carries out surface grinding processing on the workpieces reach a preset parameter, the machining sequence or parameter setting program edited by the intelligent encoder of the intelligent machining control system is automatically executed, so that the stroke distance of the workbench of the surface grinding machine moving along the X axis is shortened, an optimal grinding path is generated for the grinding wheel unit to achieve grinding operation, the grinding stroke distance is shortened, and the working efficiency is improved.
Drawings
Fig. 1 is a perspective view of a surface grinder according to a preferred embodiment of the present invention.
Fig. 2 is a front view of a surface grinder according to a preferred embodiment of the present invention.
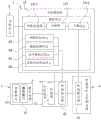
Fig. 3 is a first block diagram of the intelligent grinding machine of the present invention.
Fig. 4 is a schematic block diagram of a first structure of the intelligent grinding machine of the present invention.
Fig. 5 is a schematic view of a standard grinding path for grinding the workpiece according to fig. 3 and 4.
Fig. 6 is a schematic view of an optimum polishing path for grinding the workpiece according to the present invention in fig. 3 and 4.
Fig. 7 is a schematic block diagram (one) of a second structure of the intelligent grinding machine of the present invention.
Fig. 8 is a second block diagram of the intelligent grinding machine of the present invention.
Fig. 9 is a schematic view of a standard grinding path for grinding the workpiece according to fig. 7 and 8.
Fig. 10 is a schematic view of an optimum polishing path for grinding the workpiece shown in fig. 7 and 8 according to the present invention.
Fig. 11 is a perspective view of a common structure.
Fig. 12 is a schematic view of a processing method of a conventional structure.
Detailed Description
First, referring to fig. 1 to 6, a first configuration of an intelligent grinding machine for automatically detecting grinding according to the present invention is illustrated, which is used for processing at least one workpiece W, and comprises: the device comprises a plane grinder 1, an electric control device 2, a grinding wheel unit 3 and an intelligent processing control system 4; wherein:
the surface grinder 1 includes a base unit 11; a table 12 disposed above the base unit 11, the table 12 moving along the X-axis and being used for placing the workpiece W; a grinding unit 13 having a spindle base 131 disposed at any predetermined position of the surface grinder 1, the spindle base 131 having a front end extended with a grinding wheel set setting end 1311; the rear end of the spindle base 131 is provided with a spindle motor 1312, and the spindle motor 1312 drives the grinding wheel set setting end 1311 to rotate 360 degrees; since the surface grinder 1 is not the focus of the present invention, it will be described in brief; the surface grinder 1 is selected from any one of various NC surface grinders or automatic surface grinders, for example: saddle movable surface grinding machines, movable column surface grinding machines, two-shaft surface grinding machines, three-shaft surface grinding machines … and the like;
the electric control device 2 is arranged at any preset position of the surface grinder 1, a controller 21 is arranged in the electric control device 2, and the controller 21 is used for controlling the integral operation of the surface grinder 1;
the grinding wheel unit 3 is assembled at a grinding wheel group setting end 1311 of the spindle base 131 of the grinding unit 13 of the surface grinder 1, and the grinding wheel unit 3 is driven to rotate by the integral operation of the spindle base 131 of the grinding unit 13, so as to grind the workpiece W; and
the intelligent processing control system 4 is arranged at any preset position of the surface grinder 1, coupled and electrically connected with the controller 21 of the electric control device 2, and the intelligent processing control system 4 is provided with an intelligent encoder 41 and an intelligent driver 42; wherein:
the intelligent encoder 41 is disposed at any predetermined position of the surface grinder 1, coupled to the spindle motor 1312 of the grinding unit 13 and electrically connected thereto, and is in a synchronous rotation state with the grinding wheel unit 3; the intelligent encoder 41 is used to edit the whole processing sequence or parameter setting program of the intelligent processing control system 4; and
the intelligent driver 42 is disposed in the electronic control device 2, coupled between the controller 21 and the intelligent encoder 41 and electrically connected to the controller, and the intelligent driver 42 is configured to receive the commands transmitted by the controller 21 and the intelligent encoder 41; so as to execute the commands transmitted by the controller 21 and the intelligent encoder 41 to control the overall operation of the surface grinder 1;
the intelligent machining control system 4 further comprises a grinding detection unit 43 disposed at the grinding unit 13 of the surface grinder 1, coupled to the intelligent driver 42 and electrically connected thereto, wherein the intelligent driver 42 receives the parameter setting command of the intelligent encoder 41 and transmits the parameter setting command to the grinding detection unit 43, so that the grinding detection unit 43 detects the load force parameter of the grinding wheel unit 3 during grinding, and if an abnormality occurs, the intelligent machining control system actively prompts an alarm or notifies the detection and repair of the grinding wheel unit 3;
the intelligent machining control system 4 further includes a collision detection unit 44, disposed at the grinding unit 13 of the surface grinder 1, coupled to the intelligent driver 42 and electrically connected thereto, and configured to receive the parameter setting command of the intelligent encoder 41 through the intelligent driver 42 and transmit the command to the collision detection unit 44, so that the collision detection unit 44 detects the load force parameter at any time, sets the upper limit parameter of the load force, and prevents the grinding wheel unit 3 from being damaged due to unexpected collision with the workpiece W;
the intelligent machining control system 4 further comprises a dynamic balance calibration unit 45, which is disposed at the grinding unit 13 of the surface grinder 1, coupled to the intelligent driver 42 and electrically connected thereto, and is used for integrating the parameter setting information of the intelligent encoder 41 and the controller 21 of the electric control device 2 via the dynamic balance calibration unit 45, so that the dynamic balance calibration unit 45 can perform vibration measurement and dynamic balance on-line calibration operation on the grinding unit 13 and the grinding wheel unit 3 at any time; so as to reduce the vibration of the grinding wheel unit 3, eliminate the vibration lines on the surface of the workpiece W and improve the grinding quality, wherein the dynamic balance correction unit 45 is selected from an acceleration gauge with the frequency of more than 3 KHz;
wherein, the intelligent processing control system 4 is further provided with a grinding wheel life detection unit 46, which is disposed at the grinding unit 13 of the surface grinder 1, and is coupled to the intelligent driver 42 and electrically connected, and the grinding wheel life detection unit 46 is used to integrate the parameter setting information of the intelligent encoder 41 and the vibration measurement information of the dynamic balance correction unit 45, so that the grinding wheel life detection unit 46 can accurately detect the time when the grinding wheel unit 3 needs to be repaired and the damage detection operation, and the wear form of the grinding wheel unit 3 can be divided into wear plane, abrasive particle falling, broken abrasive particle, abrasive dust, adhesion, blockage …, etc., and the grinding wheel life detection unit 46 can accurately predict the life of the grinding wheel unit 3, thereby greatly improving the production efficiency; the dynamic balance correction unit 45 is selected from an accelerometer with frequency above 3 KHz;
furthermore, the present invention further comprises a control device 5 fixed at one side of the electric control device 2 through a connecting rod 50; the control device 5 has a control interface 51 coupled to the controller 21 of the electric control device 2 and electrically connected to the control interface for providing the user with the setting of the moving stroke of the worktable 12 of the surface grinder 1 and the setting of the rotation speed of the grinding unit 13; and the grinding wheel unit 3 sets the feeding amount of the workpiece W, and displays a start instruction of the intelligent reversing 511 for the user to switch to execute the machining program of the optimal grinding path P2 on the screen of the control interface 51; and displaying the values of the load force and cutting force parameters generated during the grinding between the grinding wheel unit 3 and the workpiece W, as shown in fig. 1 to 3;
even more, the controller 21 of the electric control device 2 is matched with an external cloud server for the user to operate on a mobile device 6, the mobile device 6 has a control interface 61 for the user to operate and control the setting of the moving stroke of the worktable 12 of the surface grinding machine 1 and the setting of the rotation speed value of the grinding unit 13; and the grinding wheel unit 3 sets the feeding amount of the workpiece W, and displays a start instruction of intelligent reversing 611 for the user to switch and execute the processing program of the optimal grinding path P2 on the screen of the control interface 61; and displaying the values of the load force and cutting force parameters generated during the grinding between the grinding wheel unit 3 and the workpiece W;
wherein the mobile device 6 is selected from any one of a smart phone, a tablet computer, a personal computer or a PDA; the control interface 61 of the mobile device 6 is selected from APP applications, which include one of microsoft operating system, android operating system and apple operating system, and mainly provides the user with the operation and setting functions of touching the control interface 61, as shown in fig. 4;
in view of the above, the present invention provides a grinding operation for machining the workpiece W, regardless of the mode of operation, the machining method including the steps of:
step S1: mounting the workpiece W on the table 12 of the surface grinder 1;
step S2: operating the control interface 51 of the control device 5 (or operating the control interface 61 of the mobile device 6), and enabling to control the surface grinding machine 1 through the controller 21 of the electric control device 2 to control the overall operation of the surface grinding machine 1 (or enabling to control the surface grinding machine 1 through the control interface 61 of the mobile device 6 to control the overall operation of the surface grinding machine 1), for example: setting the moving stroke of the worktable 12 and setting the rotation speed value of the grinding unit 13; and the grinding wheel unit 3 sets the feed amount of the workpiece W, thereby performing a plane grinding process;
step S3: when the grinding wheel unit 3 performs surface grinding processing on the workpiece W, a standard grinding path P1 is generated by the stroke distance of the table 12 of the surface grinding machine 1 when moving along the X-axis, as shown in fig. 5; and
step S4: finally, selecting to turn on the intelligent reversing 511 command in the screen of the control interface 51 of the control device 5 (or selecting to turn on the intelligent reversing 611 command in the screen of the control interface 61 of the mobile device 6), when the load force and cutting force parameters generated during the surface grinding process of the workpiece W by the grinding wheel unit 3 reach a predetermined parameter, the intelligent driver 42 of the intelligent processing control system 4 is used to receive the commands transmitted by the controller 21 of the electric control device 2 and the intelligent encoder 41, and then the processing sequence or parameter setting program edited by the intelligent encoder 41 of the intelligent processing control system 4 is automatically executed, so as to shorten the stroke distance of the table 12 of the surface grinding machine 1 moving along the X axis and generate an optimal grinding path P2, as shown in fig. 6, for the grinding wheel unit 3 to perform the grinding operation, the grinding stroke distance is shortened, so that the working efficiency is improved;
further, at step S4, during the execution of the machining program of the optimal grinding route P2, the grinding detection unit 43 synchronously executes the parameter setting of the intelligent encoder 41 transmitted by the intelligent driver 42 to detect the load force parameter of the grinding wheel unit 3 during grinding, and if an abnormality occurs, actively prompts an alarm or notifies a detection step of repairing the grinding wheel unit 3 or other items;
at step S4, during the process of executing the processing procedure of the optimal polishing path P2, the collision detection unit 44 synchronously executes the parameter setting of the intelligent encoder 41 transmitted by the intelligent driver 42 to detect the load force parameter at all times, and sets the upper limit parameter of the load force, so as to prevent the grinding wheel unit 3 from colliding with the workpiece W unexpectedly to damage the detection step;
when the step S4 is reached, in the process of executing the processing program of the optimal grinding path P2, the dynamic balance correction unit 45 is used to integrate the parameter setting information of the intelligent encoder 41 and the controller 21 of the electric control device 2, so that the dynamic balance correction unit 45 performs operations such as vibration measurement and dynamic leveling on-line correction on the grinding unit 13 and the grinding wheel unit 3 at any time; thereby reducing the vibration of the grinding wheel unit 3, eliminating the vibration lines on the surface of the workpiece W and improving the grinding quality;
when the step S4 is reached, in the process of executing the processing procedure of the optimal grinding path P2, the grinding wheel life detection unit 46 is used to integrate the parameter setting information of the intelligent encoder 41 and the vibration measurement information of the dynamic balance correction unit 45, so that the grinding wheel life detection unit 46 accurately detects the time when the grinding wheel unit 3 needs to be dressed and the operation of damage detection, etc., so that the grinding wheel life detection unit 46 can accurately predict the life of the grinding wheel unit 3, thereby greatly improving the production efficiency;
therefore, the grinding effect can be achieved by automatically detecting the overall appearance profile of the workpiece W during processing, and the stroke distance of the worktable 12 of the surface grinding machine 1 moving along the X axis is shortened to generate an optimal grinding path P2; the grinding stroke distance is shortened to improve the working efficiency.
Referring to fig. 7 to 10, and with reference to fig. 1 and 2, a second structural type of the intelligent grinding machine apparatus for automatically detecting grinding according to the present invention is illustrated, which is used for simultaneously processing a plurality of workpieces W, and includes: the device comprises a plane grinder 1, an electric control device 2, a grinding wheel unit 3 and an intelligent processing control system 4; the overall structures of the base unit 11, the table 12, the spindle seat 131 of the grinding unit 13, the grinding wheel set end 1311, and the spindle motor 1312 of the surface grinder 1 are described above, and therefore will not be described again; the controller 21 of the electric control device 2, the grinding wheel unit 3, the intelligent encoder 41 of the intelligent machining control system 4, the intelligent driver 42, the grinding detection unit 43, the collision detection unit 44, the dynamic balance correction unit 45, and the grinding wheel life detection unit 46 have the same overall structure as described above, and therefore are not described again; even further, an operation device 5 is added for operation, as shown in fig. 7; alternatively, the controller 21 of the electronic control device 2 is matched with an external cloud server for a user to operate on a mobile device 6, as shown in fig. 8, and the overall structures of the operating device 5 and the mobile device 6 are described in the foregoing description, so that the details are not repeated;
when a plurality of workpieces W are placed on the table 12 of the surface grinder 1, the intelligent machining control system 4 further includes an image sensing unit 47 disposed at any predetermined position of the surface grinder 1, coupled to the controller 21 of the electric control device 2 and electrically connected thereto, and configured to photograph the workpieces W while grinding the workpieces W by the grinding wheel unit 3 through the image sensing unit 47, and feed parameter information obtained by the photographing back into the controller 21 of the electric control device 2 for image operation and transmission, and receive instructions transmitted from the controller 21 and the intelligent encoder 41 through the intelligent driver 42, so as to assist the table 12 in generating the optimal grinding path P2 by moving along the X axis by the stroke distance; the image sensing unit 47 is a photosensitive coupling element;
in view of the above, the present invention provides a grinding operation for machining the workpieces W, including:
step S1: mounting the work W on a table 12 of the surface grinder 1;
step S2: operating the control interface 51 of the control device 5 (or operating the control interface 61 of the mobile device 6), and enabling to control the surface grinding machine 1 through the controller 21 of the electric control device 2 to control the overall operation of the surface grinding machine 1 (or enabling to control the surface grinding machine 1 through the control interface 61 of the mobile device 6 to control the overall operation of the surface grinding machine 1), for example: setting the moving stroke of the worktable 12 and setting the rotation speed value of the grinding unit 13; and the grinding wheel unit 3 sets the feed amount of the workpiece W, thereby performing a plane grinding process;
step S3: when the grinding wheel unit 3 performs surface grinding processing on the workpieces W, a standard grinding path P1 is generated by the stroke distance of the table 12 of the surface grinding machine 1 during movement along the X-axis, as shown in fig. 9; and
step S4: finally, selecting to turn on the intelligent reversing 511 command in the screen of the control interface 51 of the control device 5 (or selecting to turn on the intelligent reversing 611 command in the screen of the control interface 61 of the mobile device 6), matching with the image sensing unit 47 to perform photography when the grinding wheel unit 3 and the workpieces W are ground, feeding parameter information obtained by the photography back to the controller 21 of the electric control device 2 for image operation, when the load force and cutting force parameters generated when the grinding wheel unit 3 performs plane grinding processing on the workpieces W reach a predetermined parameter, receiving the commands transmitted by the controller 21 of the electric control device 2 and the intelligent encoder 41 through the intelligent driver 42 of the intelligent processing control system 4, starting to automatically execute the processing sequence or parameter setting program edited by the intelligent encoder 41 of the intelligent processing control system 4, the intelligent driver 42 is used for receiving the commands transmitted by the controller 21 and the intelligent encoder 41, so as to shorten the stroke distance of the table 12 of the surface grinder 1 moving along the X-axis to generate an optimal grinding path P2, as shown in fig. 10, for the grinding wheel unit 3 to achieve grinding operation, shorten the grinding stroke distance and improve the working efficiency;
therefore, the grinding effect can be achieved by automatically detecting the overall appearance profile of the workpieces W during processing, and the stroke distance of the worktable 12 of the surface grinding machine 1 moving along the X axis is shortened to generate an optimal grinding path P2; the grinding stroke distance is shortened to improve the working efficiency.
From the foregoing, it is understood that the present invention is capable of being widely applied to various industries, and has advantages of advancement and novelty.
However, the above description is only a preferred embodiment of the present invention, and the scope of the present invention should not be limited by the above description; therefore, all the equivalent changes and modifications made according to the claims of the present invention should be covered by the scope of the present invention.
Claims (10)
1. The utility model provides an automatic change intelligent grinding machine equipment of listening grinding which is used for processing at least a work piece thing and carries out the abrasive machining operation which characterized in that includes:
a flat grinder includes a base unit; the workbench is arranged above the base unit, moves along the X axis and is used for carrying the workpiece; a grinding unit, which is provided with a spindle seat and is arranged at any preset position of the surface grinder, wherein the front end of the spindle seat extends out of a grinding wheel group setting end; the rear end part of the spindle seat is provided with a spindle motor which drives the setting end of the grinding wheel group to rotate for 360 degrees through the operation of the spindle motor;
the electric control device is arranged at any preset position of the surface grinder, and a controller is arranged in the electric control device and used for controlling the integral operation of the surface grinder;
the grinding wheel unit is assembled at the grinding wheel group arranging end arranged on the main shaft seat of the grinding unit of the surface grinder, and drives the grinding wheel unit to be in a rotating state through the integral operation of the main shaft seat of the grinding unit so as to grind the workpiece; and
an intelligent processing control system, which is arranged at any preset position of the surface grinder, is coupled with the controller of the electric control device and is electrically connected with the controller, and is provided with an intelligent encoder and an intelligent driver; wherein:
the intelligent encoder is arranged at any preset position of the surface grinder, is coupled with a spindle motor of the grinding unit and is electrically connected with the spindle motor, and is in a synchronous rotating state with the grinding wheel unit; the intelligent encoder is used for editing the whole processing sequence or parameter setting program of the intelligent processing control system; and
the intelligent driver is arranged in the electric control device, is coupled between the controller and the intelligent encoder and is electrically connected with the controller and the intelligent encoder, and is used for receiving the instruction transmitted by the controller and the intelligent encoder; the controller is used for executing the instructions transmitted by the intelligent encoder to control the whole operation of the surface grinder;
therefore, the workpiece is arranged on the workbench of the surface grinder, the intelligent driver is used for receiving the instruction transmitted by the controller and the intelligent encoder and driving the surface grinder to operate integrally, the stroke distance of the workbench of the surface grinder when moving along the X axis is used for generating a standard grinding path for the grinding wheel unit to achieve grinding operation, the application of the load force and cutting force parameters generated when the grinding wheel unit and the workpiece are ground is mainly utilized, when the load force and cutting force parameters generated when the grinding wheel unit carries out surface grinding processing on the workpiece reach a preset parameter, the processing sequence or parameter setting program edited by the intelligent encoder of the intelligent processing control system is automatically executed, so as to shorten the stroke distance of the workbench of the surface grinder when moving along the X axis and generate an optimal grinding path for the grinding wheel unit to achieve grinding operation, the grinding stroke distance is shortened to improve the working efficiency.
2. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 1, wherein: the intelligent processing control system is further provided with a grinding detection unit which is arranged at the grinding unit of the surface grinder, is coupled with the intelligent driver and is electrically connected with the intelligent driver, receives the parameter setting instruction of the intelligent encoder through the intelligent driver and transmits the parameter setting instruction to the grinding detection unit, so that the grinding detection unit detects the load force parameter of the grinding wheel unit during grinding, and actively prompts warning or informs detection and repair of the grinding wheel unit if abnormity occurs.
3. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 1, wherein: the intelligent processing control system is further provided with a collision detection unit which is arranged at a grinding unit of the surface grinder, is coupled with the intelligent driver and is electrically connected with the intelligent driver, receives a parameter setting instruction of the intelligent encoder through the intelligent driver and transmits the parameter setting instruction to the collision detection unit, so that the collision detection unit detects a load force parameter at any time and sets a load force upper limit parameter to prevent the grinding wheel unit from being damaged due to unexpected collision with the workpiece.
4. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 1, wherein: the intelligent processing control system is further provided with a dynamic balance correction unit which is arranged at the grinding unit of the surface grinder, is coupled with the intelligent driver and is electrically connected with the intelligent driver, and is used for integrating parameter setting information of the intelligent encoder and the controller of the electric control device through the dynamic balance correction unit so as to enable the dynamic balance correction unit to carry out vibration measurement and dynamic balance on-line correction operation on the grinding unit and the grinding wheel unit at any time.
5. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 4, wherein: the intelligent processing control system is further provided with a grinding wheel life detection unit which is arranged at the grinding unit of the surface grinder, is coupled with the intelligent driver and is electrically connected, and is used for integrating the parameter setting information of the intelligent encoder and the vibration measurement information of the dynamic balance correction unit through the grinding wheel life detection unit so as to enable the grinding wheel life detection unit to accurately detect the time when the grinding wheel unit needs to be repaired and the damage detection operation.
6. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 4, wherein: wherein the dynamic balance correction unit is selected from an accelerometer with frequency above 3 KHz.
7. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 1, wherein: the electric control device further comprises an operation device which is fixed at one side of the electric control device through a connecting rod; the control device is provided with a control interface which is coupled with the controller of the electric control device and is in an electric connection state and used for providing the user operation to control the setting of the moving stroke of the workbench of the surface grinder and the setting of the rotation speed value of the grinding unit; setting the feeding amount of the workpiece by the grinding wheel unit, and displaying an intelligent reversing starting instruction for the user to switch and execute the machining program of the optimal grinding path in the picture of the control interface; and displaying the load force and cutting force parameter values generated during the grinding between the grinding wheel unit and the workpiece.
8. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 1, wherein: when the work pieces are loaded on the workbench of the surface grinder, the intelligent processing control system further comprises an image sensing unit which is arranged at any preset position of the surface grinder and is electrically connected with the controller of the electric control device, the image sensing unit is used for photographing when the grinding wheel unit and the work pieces are ground, parameter information obtained by photographing is fed back to the controller of the electric control device for image operation processing and transmission, and the intelligent driver is used for receiving instructions transmitted by the controller and the intelligent encoder so as to assist the workbench to move along the X axis and generate the optimal grinding path.
9. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 1, wherein: the controller of the electric control device is matched with an external cloud server to be operated by a user on a mobile device, and the mobile device is provided with an operation interface which provides the user operation to control the setting of the moving stroke of the workbench of the surface grinding machine and the setting of the rotation speed value of the grinding unit; setting the feeding amount of the workpiece by the grinding wheel unit, and displaying an intelligent reversing starting instruction for the user to switch and execute the machining program of the optimal grinding path in the picture of the control interface; and displaying the load force and cutting force parameter values generated during the grinding between the grinding wheel unit and the workpiece.
10. The intelligent grinding machine apparatus with automatic grinding detection as claimed in claim 9, wherein: wherein the mobile device is selected from any one of a smart phone, a tablet computer, a personal computer or a PDA; the control interface of the mobile device is selected from APP applications, which include one of Microsoft operating system, android operating system and apple operating system, and the main function is to provide the user with the operation and setting functions of touching the control interface.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710500008.8A CN109129067B (en) | 2017-06-27 | 2017-06-27 | Intelligent grinding machine equipment capable of automatically detecting grinding |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710500008.8A CN109129067B (en) | 2017-06-27 | 2017-06-27 | Intelligent grinding machine equipment capable of automatically detecting grinding |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109129067A CN109129067A (en) | 2019-01-04 |
| CN109129067B true CN109129067B (en) | 2020-09-04 |
Family
ID=64805129
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710500008.8A Expired - Fee Related CN109129067B (en) | 2017-06-27 | 2017-06-27 | Intelligent grinding machine equipment capable of automatically detecting grinding |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109129067B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110238720A (en) * | 2019-07-18 | 2019-09-17 | 佛山科学技术学院 | A kind of surface grinding machine |
| CN211122390U (en) * | 2019-08-29 | 2020-07-28 | 南京星合精密智能制造研究院有限公司 | Grinding wheel grinding force detection device for processing aspheric surface parts |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4547996A (en) * | 1984-04-26 | 1985-10-22 | Moore Special Tool Co., Inc. | Jig grinder with automatic C-axis feedrate control |
| US6397124B1 (en) * | 1999-05-11 | 2002-05-28 | Falcon Machine Tools Co., Ltd. | Interactive system between machine tool and operator |
| CN1996187A (en) * | 2006-01-05 | 2007-07-11 | 台达电子工业股份有限公司 | AC servo system with distribution type motion controller |
| CN101234479A (en) * | 2008-01-16 | 2008-08-06 | 廊坊智通机器人系统有限公司 | Abrasive belt grinding processing method and device capable of automatic repair and maintain for workpiece |
| CN102259279A (en) * | 2011-08-15 | 2011-11-30 | 四川欧曼机械有限公司 | Novel grinding machine |
| CN203853889U (en) * | 2013-08-23 | 2014-10-01 | 北京永星鼎盛玻璃机械有限公司 | Control system for controlling grinding wheel feed amount of edge grinding machine |
| CN104669094A (en) * | 2014-11-27 | 2015-06-03 | 佛山市博科数控机械有限公司 | Remote handheld terminal for numerical control polishing machine |
| CN104972362A (en) * | 2014-04-14 | 2015-10-14 | 沈阳远大科技园有限公司 | Intelligent force control robot grinding system and method |
-
2017
- 2017-06-27 CN CN201710500008.8A patent/CN109129067B/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4547996A (en) * | 1984-04-26 | 1985-10-22 | Moore Special Tool Co., Inc. | Jig grinder with automatic C-axis feedrate control |
| US6397124B1 (en) * | 1999-05-11 | 2002-05-28 | Falcon Machine Tools Co., Ltd. | Interactive system between machine tool and operator |
| CN1996187A (en) * | 2006-01-05 | 2007-07-11 | 台达电子工业股份有限公司 | AC servo system with distribution type motion controller |
| CN101234479A (en) * | 2008-01-16 | 2008-08-06 | 廊坊智通机器人系统有限公司 | Abrasive belt grinding processing method and device capable of automatic repair and maintain for workpiece |
| CN102259279A (en) * | 2011-08-15 | 2011-11-30 | 四川欧曼机械有限公司 | Novel grinding machine |
| CN203853889U (en) * | 2013-08-23 | 2014-10-01 | 北京永星鼎盛玻璃机械有限公司 | Control system for controlling grinding wheel feed amount of edge grinding machine |
| CN104972362A (en) * | 2014-04-14 | 2015-10-14 | 沈阳远大科技园有限公司 | Intelligent force control robot grinding system and method |
| CN104669094A (en) * | 2014-11-27 | 2015-06-03 | 佛山市博科数控机械有限公司 | Remote handheld terminal for numerical control polishing machine |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109129067A (en) | 2019-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4456520B2 (en) | Multi-axis spherical grinding apparatus and grinding method | |
| JP2637488B2 (en) | Numerically controlled grinding machine | |
| CN103481123B (en) | A kind of wire drawing die automatic ultrasonic shaping processing machine and processing method | |
| CN105598808B (en) | One kind automation polishing system and polishing method | |
| KR940009090B1 (en) | Grinder robot | |
| JP7258563B2 (en) | automatic grinder | |
| TWI624741B (en) | Automatic detection grinding of the intelligent grinder equipment | |
| CN103831695A (en) | Large free-form surface robot polishing system | |
| US20120295516A1 (en) | Multi-carriage symmetrical numerically controlled coordinate grinding machine | |
| CN207953500U (en) | A kind of adaptive surface sanding and polishing system based on robot | |
| CN102870055A (en) | Numerically-controlled machine tool | |
| US10259093B2 (en) | Smart grinding machine that detects grinding process automatically | |
| TWM549137U (en) | Smart grinding machine equipment automatically detecting grinding | |
| CN109129067B (en) | Intelligent grinding machine equipment capable of automatically detecting grinding | |
| CN109202686B (en) | Robot grinding system and grinding control method | |
| CN102985222A (en) | Grinding plate and grinding method | |
| EP2687325A1 (en) | Lathe control system | |
| CN205630316U (en) | A set ware is repaiied in removal | |
| JP3806408B2 (en) | Honing machine and honing method | |
| JP2019155557A (en) | Method for estimation of drive shaft deviation in machine tool and machine tool with use thereof | |
| JP2006297512A (en) | Spherical machining device for lens | |
| JP2007125644A (en) | Truing device of grinding wheel | |
| JP6334775B2 (en) | Processing apparatus, control method thereof, and program | |
| JP7069634B2 (en) | Grinding machine and grinding method | |
| CN107363676B (en) | Eyeglass lens processing device and eyeglass lens processing program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200904 Termination date: 20210627 |