CN108432447B - 一种步进式全自动除草机 - Google Patents
一种步进式全自动除草机 Download PDFInfo
- Publication number
- CN108432447B CN108432447B CN201810168170.9A CN201810168170A CN108432447B CN 108432447 B CN108432447 B CN 108432447B CN 201810168170 A CN201810168170 A CN 201810168170A CN 108432447 B CN108432447 B CN 108432447B
- Authority
- CN
- China
- Prior art keywords
- weed
- motor
- weeding
- driving
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D43/00—Mowers combined with apparatus performing additional operations while mowing
- A01D43/06—Mowers combined with apparatus performing additional operations while mowing with means for collecting, gathering or loading mown material
- A01D43/063—Mowers combined with apparatus performing additional operations while mowing with means for collecting, gathering or loading mown material in or into a container carried by the mower; Containers therefor
- A01D43/0633—Mowers combined with apparatus performing additional operations while mowing with means for collecting, gathering or loading mown material in or into a container carried by the mower; Containers therefor with compacting means
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D75/00—Accessories for harvesters or mowers
Abstract
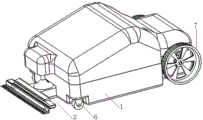
本发明公开了一种步进式全自动除草机,包括机器壳体,所述机器壳体前部设置有剪草装置,内部设置有杂草起收装置、杂草压缩装置以及杂草打包装置,下部设置有转向轮装置、机动轮装置,剪草装置将杂草修剪后,通过杂草起收装置对杂草进行收集,并通过杂草压缩装置、杂草打包装置进行打包,除草机由机动轮装置驱动前进,并通过三阶传送带驱动杂草起收装置工作,通过二阶传送带驱动剪草装置工作,通过转向轮装置调整方向;本发明有效解决了传统除草设备在使用过程中不但需要一定的操作经验,存在安全隐患的问题,而且有限解决了传统除草设备在修剪后需要对杂草进行清理、打包以及运输,从而增加工作量的问题。
Description
技术领域
本发明涉及园艺绿化设备技术领域,具体涉及一种步进式全自动除草机。
背景技术
除草机又称割草机、剪草机、草坪修剪机等。除草机是一种用于修剪草坪、植被等的机械工具,传统的除草机是由刀盘、发动机、行走轮、行走机构、刀片、扶手、控制部分等组成。刀盘装在行走轮上,刀盘上装有发动机,发动机的输出轴上装有刀片,刀片利用发动机的高速旋转在速度方面提高很多,节省了除草工人的作业时间,减少了大量的人力资源,传统的除草机一般用于大型的园林修剪。随着国民经济的提升,人们对居住环境也提出来更高的要求,居民对于自家庭院的草坪修剪,若采用传统的除草设备,不但功率大,产生很大的噪音,而且传统的除草设备也非常危险,需要一定的操作经验,还有传统的除草设备将剪下的杂草打落在附近,需要再次清理、打包、运输,增加了修剪草坪的工作量。
发明内容
本发明要解决的技术问题是提供一种步进式全自动除草机,本发明有效解决了传统除草设备在使用过程中不但需要一定的操作经验,存在安全隐患的问题,而且有限解决了传统除草设备在修剪后需要对杂草进行清理、打包以及运输,从而增加工作量的问题。
本发明通过以下技术方案实现:
一种步进式全自动除草机,包括机器壳体(1),其特征在于:所述机器壳体(1)前部设置有剪草装置(2),内部设置有杂草起收装置(3)、杂草压缩装置(4)以及杂草打包装置(5),下部设置有转向轮装置(6)、机动轮装置(7),剪草装置(2)将杂草修剪后,通过杂草起收装置(3)对杂草进行收集,并通过杂草压缩装置(4)、杂草打包装置(5)进行打包,除草机由机动轮装置(7)驱动前进,并通过三阶传送带(8)驱动杂草起收装置(3)工作,通过二阶传送带(9)驱动剪草装置(2)工作,通过转向轮装置(6)调整方向。
本发明进一步技术改进方案是:
所述剪草装置(2)包括上刀架(21)、下刀架(22),锥齿轮传动杆(23)通过旋转往复机构(24)分别带动上刀架(21)、下刀架(22)做左右往复运动,上刀架(21)沿长度方向两侧对称设置有超声波传感器(25)。
本发明型进一步技术改进方案是:
所述杂草起收装置(3)包括起收滚筒(31)、杂草收集盒(32),起收滚筒(31)为毛刷辊,将剪草装置(2)修剪下的杂草通过起收滚筒(31)卷入设置于其后方机器壳体(1)内部的杂草收集盒(32)内。
本发明进一步技术改进方案是:
所述杂草压缩装置(4)包括折叠架(41),折叠架(41)一端设置有压缩板(42),相对端通过一组金属材料制成套环(43)与机器壳体(1)内壁面设置的导杆(44)滑动连接,导杆(44)中部设置有电磁包A(45),两端通过弹簧(46)与套环(43)连接,压缩板(42)前部设置有距离传感器(47)。
本发明进一步技术改进方案是:
所述杂草打包装置(5)包括设置于杂草起收装置(3)的杂草收集盒(32)进口处前部的矩形套袋框架(51),杂草收集盒(32)进口处两侧壁对称设置有竖向导槽(53),两竖向导槽(53)之间设置有一组热塑杆(54),两个热塑杆(54)端部分别对应活动连接有活动杆(55),活动杆(55)之间通过扭簧连接,同时活动杆(55)之间还设置有电磁包B(56),活动杆(55)与热塑杆(54)连接端设置有U型滑槽(57)。
本发明进一步技术改进方案是:
所述机动轮装置(7)包括电机(71)、主动轴(72)、传动轴(73)以及机动轮(74),电机(71)通过主传动链(75)与主动轴(72)驱动连接,传动轴(73)两端设置有机动轮(74),主动轴(72)通过间隙运动机构(76)驱动机动轮(74)间隙滚动,主动轴(72)通过一阶传送带(77)驱动中间传动轴(78)转动,中间传动轴(78)分别通过二阶传送带(9)、三阶传送带(8)驱动剪草装置(2)、驱动杂草起收装置(3)工作。
本发明进一步技术改进方案是:
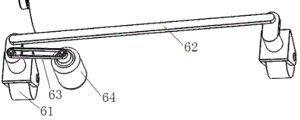
所述转向轮装置(6)两个转向轮(61),转向轮(61)之间设置有转向连杆(62),其中一个转向轮(61)通过同步带(63)连接有转向电机(64)。
本发明进一步技术改进方案是:
所述旋转往复机构(24)包括固定平台(241),固定平台(241)中部设置圆柱形限位槽(242),限位槽(242)通过中心轴设置有联动块(243),联动块(243)两侧对称设置有限位柱A(244)、限位柱B(245), 联动块(243)分别通过限位柱A(244)、限位柱B(245)与上刀架(21)、下刀架(22)连接,限位柱A(244)自由端通过驱动块A(246)与锥齿轮传动杆(23)自由端驱动连接。
本发明进一步技术改进方案是:
所述间隙运动机构(76)包括设置于主动轴(72)末端的驱动块B(761)、设置于传动轴(73)末端的传动拨叉(762)以及等角度设置于机动轮内侧的多个凸柱(763)组成,驱动块B(761)自由端通过转轴与传动拨叉(762)连接,主动轴(72)驱动驱动块B(761)做圆周运动,驱动块B(761)带动传动拨叉(762)弧线运动。
本发明进一步技术改进方案是:
所述上刀架(21)、下刀架(22)均设置三角形双刃除草刀(10)。
本发明与现有技术相比,具有以下明显优点:
一、本发明通过剪草装置、内部设置有杂草起收装置、杂草压缩装置以及杂草打包装置可同步实现修剪、收草、压缩打包杂草等一些列工序,显著提高了除草作业的效率,而且通过一个电机可同时驱动多个装置工作,动力系统简单单一,维修方便。
二、本发明剪草装置两侧对称设置有超声波传感器,通过传感器来检测前方的杂草是否剪除干净,进一步提高了修剪质量,采用旋转往复机构分别带动刀架、刀架做左右往复运动,可显著提升切剪动作,刀架上安装有三角除草刀,刃口锋利。
三、本发明可通过转向轮装置调整除草区域,可通过控制器内预设除草位置,从而保证定位准确。
四、本发明设置杂草压缩装置通过导杆(44)中部设置的电磁包A以及两端两端设置的弹簧来控制压缩板的压缩动作,压缩板通过前部设置的距离传感器判断是否需要进行压缩动作。
五、本发明机动轮装置采用间隙运动机构驱动,使得除草机的行进与除草配合进行,而且更有利于除草机在草坪上的行进。
附图说明
图 1为本发明的外部结构示意图;
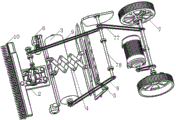
图2为本发明的内部结构示意图;
图3为本发明剪草装置结构示意图;
图4为本发明杂草起收装置结构示意图;
图5为本发明杂草压缩装置结构示意图;
图6为本发明杂草打包装置结构示意图;
图7为本发明机动轮装置结构示意图;
图8为本发明转向轮装置机构示意图;
图9为本发明间隙运动机构示意图。
具体实施方式
下面结合附图1—9说明本发明的技术解决方案。
本发明包括机器壳体1,机器壳体1前部设置有剪草装置2,内部设置有杂草起收装置3、杂草压缩装置4以及杂草打包装置5,下部设置有转向轮装置6、机动轮装置7,剪草装置2将杂草修剪后,通过杂草起收装置3对杂草进行收集,并通过杂草压缩装置4、杂草打包装置5进行打包,除草机由机动轮装置7驱动前进,并通过三阶传送带8驱动杂草起收装置3工作,通过二阶传送带9驱动剪草装置2工作,通过转向轮装置6调整方向。
其中,剪草装置2包括上刀架21、下刀架22,锥齿轮传动杆23通过旋转往复机构24分别带动上刀架21、下刀架22做左右往复运动,上刀架21沿长度方向两侧对称设置有超声波传感器25,上刀架21、下刀架22均设置三角形双刃除草刀10,其中,旋转往复机构24包括固定平台241,固定平台241中部设置圆柱形限位槽242,限位槽242通过中心轴设置有联动块243,联动块243两侧对称设置有限位柱A244、限位柱B245, 联动块243分别通过限位柱A244、限位柱B245与上刀架2、下刀架22连接,限位柱A244自由端通过驱动块A246与锥齿轮传动杆23自由端驱动连接。
其中,杂草起收装置3包括起收滚筒31、杂草收集盒32,起收滚筒31为毛刷辊,将剪草装置2修剪下的杂草通过起收滚筒31卷入设置于其后方机器壳体1内部的杂草收集盒32内。
其中,杂草压缩装置4包括折叠架41,折叠架41一端设置有压缩板42,相对端通过一组金属材料制成套环43与机器壳体1内壁面设置的导杆44滑动连接,导杆44中部设置有电磁包A45,两端通过弹簧46与套环43连接,压缩板42前部设置有距离传感器47。
其中,杂草打包装置5包括设置于杂草起收装置3的杂草收集盒32进口处前部的矩形套袋框架51,杂草收集盒32进口处两侧壁对称设置有竖向导槽53,两竖向导槽53之间设置有一组热塑杆54,两个热塑杆54端部分别对应活动连接有活动杆55,活动杆55之间通过扭簧连接,同时活动杆55之间还设置有电磁包B56,活动杆55与热塑杆54连接端设置有U型滑槽57。
其中,机动轮装置7包括电机71、主动轴72、传动轴73以及机动轮74,电机71通过主传动链75与主动轴72驱动连接,传动轴73两端设置有机动轮74,主动轴72通过间隙运动机构76驱动机动轮74间隙滚动,主动轴72通过一阶传送带77驱动中间传动轴78转动,中间传动轴78分别通过二阶传送带9、三阶传送带8驱动剪草装置2、驱动杂草起收装置3工作,其中,间隙运动机构76包括设置于主动轴72末端的驱动块B761、设置于传动轴73末端的传动拨叉762以及等角度设置于机动轮内侧的多个凸柱763组成,驱动块B761自由端通过转轴与传动拨叉762连接,主动轴72驱动驱动块B761做圆周运动,驱动块B761带动传动拨叉762弧线运动。
其中,所述转向轮装置6两个转向轮61,转向轮61之间设置有转向连杆62,其中一个转向轮61通过同步带63连接有转向电机64。
其中,电机71、转向电机64、超声波传感器25、电磁包A45、磁包B56、距离传感器47均可通过常规的中央处理器实现控制。
通过图1-9简述本发明的工作过程:
除草机在日常使用过程中,首先开启电机71,电机71通过主传动链75带动主动轴72转动,主动轴72通过间隙运动机构76驱动机动轮74间隙滚动,机动轮74之间通过传动轴73连接,主动轴72通过一阶传送带77驱动中间传动轴78转动,中间传动轴78分别通过二阶传送带9、三阶传送带8驱动剪草装置2、驱动杂草起收装置3工作,其中剪草装置2,二阶传送带9通过驱动自由端为锥齿轮的锥齿轮轴驱动剪草装置2的锥齿轮传动杆23转动,锥齿轮传动杆23驱动复机构24从而驱动上刀架21、下刀架22做左右往复运动,剪草装置通过上刀架两端设置的超声波传感器25判断杂草是否清除干净,被修剪下来的杂草通过杂草起收装置3的起收滚筒31往杂草收集盒32中归集,随着杂草收集盒32中越来越多,杂草收集盒32入口侧设置有矩形套袋框架51,矩形套袋框架51套有敞口式套袋,待杂草在杂草收集盒32中积攒较多时,杂草压缩装置4开始工作,通过电磁包A45通断电来实现折叠架41的收缩,从而实现压缩板42将堆积在杂草收集盒32中的杂草进行压实,杂草压缩装置4是否工作通过压缩板42前部设置有距离传感器47控制,待杂草在杂草收集盒32内的距离小于设定值即开始工作,杂草收集盒32中的杂草收集满后,杂草打包装置5启动,通过电磁包B56的通电使得两活动杆55向一起合拢,两热塑杆54在竖向导槽53的限位下,热塑杆54使得有杂草的套袋进行热封,热封好套袋后电磁包B56断电,两热塑杆54在活动杆55作用下回位,热封好的套袋顶部作为下一个套袋的底部继续使用,待除草机需要进行转弯作业时,转向轮装置6的两个转向轮61中一个,在转向电机64的驱动下进行转向作业。
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
Claims (5)
1.一种步进式全自动除草机,包括机器壳体(1),其特征在于:所述机器壳体(1)前部设置有剪草装置(2),内部设置有杂草起收装置(3)、杂草压缩装置(4)以及杂草打包装置(5),下部设置有转向轮装置(6)、机动轮装置(7),剪草装置(2)将杂草修剪后,通过杂草起收装置(3)对杂草进行收集,并通过杂草压缩装置(4)、杂草打包装置(5)进行打包,除草机由机动轮装置(7)驱动前进,并通过三阶传送带(8)驱动杂草起收装置(3)工作,通过二阶传送带(9)驱动剪草装置(2)工作,通过转向轮装置(6)调整方向;
所述剪草装置(2)包括上刀架(21)、下刀架(22),锥齿轮传动杆(23)通过旋转往复机构(24)分别带动上刀架(21)、下刀架(22)做左右往复运动,上刀架(21)沿长度方向两侧对称设置有超声波传感器(25);
所述旋转往复机构(24)包括固定平台(241),固定平台(241)中部设置圆柱形限位槽(242),限位槽(242)通过中心轴设置有联动块(243),联动块(243)两侧对称设置有限位柱A(244)、限位柱B(245), 联动块(243)分别通过限位柱A(244)、限位柱B(245)与上刀架(21)、下刀架(22)连接,限位柱A(244)自由端通过驱动块A(246)与锥齿轮传动杆(23)自由端驱动连接;
所述杂草起收装置(3)包括起收滚筒(31)、杂草收集盒(32),起收滚筒(31)为毛刷辊,将剪草装置(2)修剪下的杂草通过起收滚筒(31)卷入设置于其后方机器壳体(1)内部的杂草收集盒(32)内;
所述杂草压缩装置(4)包括折叠架(41),折叠架(41)一端设置有压缩板(42),相对端通过一组金属材料制成套环(43)与机器壳体(1)内壁面设置的导杆(44)滑动连接,导杆(44)中部设置有电磁包A(45),两端通过弹簧(46)与套环(43)连接,压缩板(42)前部设置有距离传感器(47);
所述杂草打包装置(5)包括设置于杂草起收装置(3)的杂草收集盒(32)进口处前部的矩形套袋框架(51),杂草收集盒(32)进口处两侧壁对称设置有竖向导槽(53),两竖向导槽(53)之间设置有一组热塑杆(54),两个热塑杆(54)端部分别对应活动连接有活动杆(55),活动杆(55)之间通过扭簧连接,同时活动杆(55)之间还设置有电磁包B(56),活动杆(55)与热塑杆(54)连接端设置有U型滑槽(57)。
2.根据权利要求1所述的一种步进式全自动除草机,其特征在于:所述机动轮装置(7)包括电机(71)、主动轴(72)、第一传动轴(73)以及机动轮(74),电机(71)通过主传动链(75)与主动轴(72)驱动连接,第一传动轴(73)两端设置有机动轮(74),主动轴(72)通过间隙运动机构(76)驱动机动轮(74)间隙滚动,主动轴(72)通过一阶传送带(77)驱动中间传动轴(78)转动,中间传动轴(78)分别通过二阶传送带(9)、三阶传送带(8)驱动剪草装置(2)、驱动杂草起收装置(3)工作。
3.根据权利要求1所述的一种步进式全自动除草机,其特征在于:所述转向轮装置(6)包括两个转向轮(61),转向轮(61)之间设置有转向连杆(62),其中一个转向轮(61)通过同步带(63)连接有转向电机(64)。
4.根据权利要求2所述的一种步进式全自动除草机,其特征在于:所述间隙运动机构(76)包括设置于主动轴(72)末端的驱动块B(761)、设置于第一传动轴(73)末端的传动拨叉(762)以及等角度设置于机动轮内侧的多个凸柱(763),驱动块B(761)自由端通过转轴与传动拨叉(762)连接,主动轴(72)驱动驱动块B(761)做圆周运动,驱动块B(761)带动传动拨叉(762)弧线运动。
5.根据权利要求1所述的一种步进式全自动除草机,其特征在于:所述上刀架(21)、下刀架(22)均设置三角形双刃除草刀(10)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810168170.9A CN108432447B (zh) | 2018-02-28 | 2018-02-28 | 一种步进式全自动除草机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810168170.9A CN108432447B (zh) | 2018-02-28 | 2018-02-28 | 一种步进式全自动除草机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108432447A CN108432447A (zh) | 2018-08-24 |
| CN108432447B true CN108432447B (zh) | 2023-06-30 |
Family
ID=63193043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810168170.9A Active CN108432447B (zh) | 2018-02-28 | 2018-02-28 | 一种步进式全自动除草机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108432447B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111771519B (zh) * | 2020-07-23 | 2022-08-16 | 南京昱晟机器人科技有限公司 | 一种环境保护用具有防飞溅结构的除草机切割机构 |
| CN112616420A (zh) * | 2020-12-09 | 2021-04-09 | 上海电机学院 | 一种双工位型除草机 |
| CN112616329A (zh) * | 2020-12-09 | 2021-04-09 | 上海电机学院 | 一种角度可调的自动化除草机 |
| CN112913454B (zh) * | 2021-02-01 | 2022-03-01 | 重庆文理学院 | 一种除草范围和除草程度可调的除草机 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000175533A (ja) * | 1998-12-17 | 2000-06-27 | Yoshimitsu Ogura | 芝生雑草除去装置 |
| CN202335235U (zh) * | 2011-12-01 | 2012-07-18 | 梅州市绿鹰高尔夫园林设备有限公司 | 果岭剪草机 |
| CN103850207A (zh) * | 2012-12-05 | 2014-06-11 | 襄阳市第二十五中学 | 地面杂草和纸屑清理手推车 |
| CN104996073B (zh) * | 2015-06-19 | 2017-08-25 | 盐城工学院 | 秸秆收割、压缩、打包一体机 |
| CN205179766U (zh) * | 2015-12-03 | 2016-04-27 | 山东科技大学 | 剪草机 |
-
2018
- 2018-02-28 CN CN201810168170.9A patent/CN108432447B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108432447A (zh) | 2018-08-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108432447B (zh) | 一种步进式全自动除草机 | |
| CN112930847B (zh) | 一种林业用割草装置 | |
| CN210381917U (zh) | 一种自动收取草料的除草机 | |
| CN108738655B (zh) | 一种往复切割式玫瑰剪枝还田机 | |
| CN209594280U (zh) | 一种带有收集草功能的园林除草机 | |
| CN211322075U (zh) | 一种园林绿化用割草装置 | |
| CN208029456U (zh) | 一种储草式除草机 | |
| CN205431037U (zh) | 一种具有驱蚊功能的手推草坪修剪机 | |
| CN205546537U (zh) | 一种超声驱蚊剪草机 | |
| CN214508016U (zh) | 一种草坪修剪机 | |
| CN210782081U (zh) | 一种手推式果蔬种植用割草机 | |
| CN106576582A (zh) | 一种可遥控往复式电动剪草机 | |
| CN105746071A (zh) | 一种超声驱蚊剪草机 | |
| CN208836603U (zh) | 一种茶树种植修剪机 | |
| CN112293048A (zh) | 一种新型园林割草机 | |
| CN206728595U (zh) | 一种园林地面修整装置 | |
| CN214592910U (zh) | 一种手扶式草坪剪疏机 | |
| CN205431038U (zh) | 一种手推式修剪草坪机 | |
| CN217608383U (zh) | 一种农业种植用环保除草机 | |
| CN205408595U (zh) | 一种剪草机 | |
| CN205408599U (zh) | 一种健康环保型草坪修剪工具 | |
| CN207560767U (zh) | 一种割草机 | |
| CN208509605U (zh) | 一种农业用便于使用的割草机 | |
| CN205408604U (zh) | 一种收获机用割藤装置 | |
| CN108650905A (zh) | 一种园林用多功能松土工具及使用方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |