CN107975552B - 用于致动制动器的操作控制器和特别是椅子的可移动单元 - Google Patents
用于致动制动器的操作控制器和特别是椅子的可移动单元 Download PDFInfo
- Publication number
- CN107975552B CN107975552B CN201711003778.8A CN201711003778A CN107975552B CN 107975552 B CN107975552 B CN 107975552B CN 201711003778 A CN201711003778 A CN 201711003778A CN 107975552 B CN107975552 B CN 107975552B
- Authority
- CN
- China
- Prior art keywords
- brake
- control element
- braking
- chair
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B33/00—Castors in general ; Anti-clogging castors
- B60B33/0078—Castors in general ; Anti-clogging castors characterised by details of the wheel braking mechanism
- B60B33/0089—Castors in general ; Anti-clogging castors characterised by details of the wheel braking mechanism acting on the floor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C7/00—Parts, details, or accessories of chairs or stools
- A47C7/002—Chair or stool bases
- A47C7/006—Chair or stool bases with castors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C1/00—Flexible shafts; Mechanical means for transmitting movement in a flexible sheathing
- F16C1/10—Means for transmitting linear movement in a flexible sheathing, e.g. "Bowden-mechanisms"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B2200/00—Type of product being used or applied
- B60B2200/20—Furniture or medical appliances
- B60B2200/22—Chairs
- B60B2200/222—Office chairs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B33/00—Castors in general ; Anti-clogging castors
- B60B33/0036—Castors in general ; Anti-clogging castors characterised by type of wheels
- B60B33/0042—Double or twin wheels
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Braking Arrangements (AREA)
- Chairs Characterized By Structure (AREA)
- Chair Legs, Seat Parts, And Backrests (AREA)
Abstract
用于致动制动器的操作控制器和特别是椅子的可移动单元。本发明提供操作控制器(28),其包括:制动体(26),其能够在制动位置和释放位置之间调节,在所述制动位置中所述制动体(26)与制动表面(U)摩擦接触,在所述释放位置中所述制动体(26)被从所述制动表面(U)拉回;载荷输入部(22),其被设定成接收来自使用者的加载力;以及载荷触发机构(42;46),其将作用于所述载荷输入部(22)的加载力转换为所述制动体(26)的从所述释放位置到所述制动位置的调节运动。
Description
技术领域
本发明涉及一种操作控制器,其包括:制动体,其能够在制动位置和释放位置之间调节,在所述制动位置中所述制动体与制动表面摩擦接触,在所述释放位置中所述制动体从被所述制动表面拉回;载荷输入部,其被设定成接收来自使用者的加载力;以及载荷触发机构,其将作用于所述载荷输入部的加载力转换为所述制动体的从所述释放位置到所述制动位置的调节运动。本发明还涉及包括该类型的操作控制器的可移动单元,借助于该类型的操作控制器能够制动可移动单元沿着地面的运动。
背景技术
现有技术中已知上述类型的操作控制器,例如是在可滚动滑架或其它家具上的可脚踏致动的制动器的形式。由于载荷输入部被使用者的脚施加载荷,能够将制动器从释放位置调节到制动位置,以防止单元意外滚动。这种类型的制动装置的缺点是使用者必须单独地执行在一些情况下相当复杂的制动器的致动从而确保单元被固定以防意外运动。如果使用者忘记致动制动器,例如如果使用者斜靠或者坐在一件没有充分固定以防滚动的家具上,则不能排除意外结果或甚至意外事故。另一方面,在某些情况下,可移动单元的滚动运动或者滑动运动本质上是期望的。例如,在设置有滚轮的办公椅中,即使在单元被施加载荷时,椅子也应当能够以受控的方式沿着地面移动。在这种情况下,本质上应当存在该类型的单元的未制动运动的可能性。
发明内容
在该背景下,本发明的目的是提供操作控制器,其在可移动单元中能够制动或阻止单元的意外移动,但同时该操作控制器在使用者期望时能够实现可移动单元的受控运动。
根据本发明,该目的通过一种操作控制器实现,该操作控制器包括:制动体,其能够在制动位置和释放位置之间调节,在所述制动位置中所述制动体与制动表面摩擦接触,在所述释放位置中所述制动体被从所述制动表面拉回;载荷输入部,其被设定成接收来自使用者的加载力,以及载荷触发机构,其将作用于所述载荷输入部的加载力转换为所述制动体的从所述释放位置到所述制动位置的调节运动;和制动释放机构,其被设定成在所述加载力作用于所述载荷输入部的状态下能够将所述制动体从所述制动位置调节到所述释放位置。
因此,根据本发明的操作控制器一方面包括载荷触发机构,该载荷触发机构确保当使用者施加载荷时制动器到达制动位置以防止意外运动。另一方面,根据本发明提供一种制动释放机构,即使在加载力连续作用期间,该制动释放机构也能够通过使用者致动来控制制动器的释放,因而在期望时使可移动单元能够运动。如果操作控制器被安装于例如办公椅的可滚动的家具中,则来自使用者的竖直作用的加载力能够被转换为制动体进入制动位置的运动,以此方式,一旦使用者对家具向下施加载荷时、例如坐在椅子上或者斜向下地斜靠在椅子上,制动器就自动生效。因此,当该加载力作用时,制动器自动致动并防止家具意外滚动。如果使用者随后坐在或者斜靠在家具上,并且随后决定允许家具的滚动运动,则根据本发明的制动释放机构能够将制动体调节到释放位置,以此方式,能够发生沿着地面的期望的运动。
在本发明的优选实施方式中,操作控制器还包括退回机构,如果加载力被移除,则退回机构使载荷触发机构回到初始状态,以此方式,载荷触发机构在这种情况下将新作用于载荷输入部的加载力转换成使制动体从释放位置到制动位置的调节运动。该变型表示进一步的安全措施。由于退回机构,即使在制动释放机构被致动并且制动体被调节到释放位置之后,也能够确保在移除载荷和新施加载荷之后,载荷触发机构可靠地使制动体移动回到制动位置。例如,如果当施加载荷时、例如当使用者坐在家具上时,使用者决定使用制动释放机构释放制动器并且沿着地面进行受控的滚动运动或滑动运动,以及如果使用者随后离开家具使得载荷力被移除,则退回机构使操作控制器可靠且自动地回到初始状态,以此方式,当新施加载荷时、例如如果使用者或另一使用者新坐在或斜靠在家具上时,载荷触发机构总是自动地将制动体设定到制动位置,以确保可移动单元不会意外滚动或滑动。
优选地,载荷接收部和载荷触发机构被设定为接收大致竖直向下作用的加载力。在这种情况下,特别地,能够至少部分地由使用者的重量的力来启动制动操作。当从释放位置移动到制动位置时,制动体还可以向下移动,以使结构简单和操作可靠成为可能。特别地,在这种情况下,能够以简单的方式将来自使用者的重量的向下作用的加载力转换为制动力。
在优选实施方式中,载荷触发机构包括能够通过加载力的作用沿着控制轴线例如竖直向下地移动的第一控制元件。以这种方式,能够将加载力直接用作用于移动控制元件的控制力。因此,第一控制元件可以被第一弹性部件沿与加载力相反的方向施力,以此方式,加载力的移除能够被自动转换成控制元件的对应的相反运动,并且使对应的操作控制器的返回成为可能。
优选地,控制元件将加载力传递到制动控制元件,以实现制动体的实际制动运动。在这种情况下,制动体可以形成于制动控制元件(或甚至形成制动控制元件本身),或者制动体可以被制动控制元件移动。由于第一控制元件和制动控制元件被设置为单独的部件,所以能够建立从载荷接收部到用于制动过程的制动体的对应的力传递,并且相反地,尽管加载力持续施加,但是为了释放制动器可以部分或全部地中断这种力传递。
特别地,制动释放机构可以被设定成在制动控制元件的从制动位置到释放位置的运动中调节制动控制元件,以此方式,使得制动体和第一控制元件之间的距离变小。因此,当由使用者通过施加加载力已经使第一控制元件从空载位置移动到加载位置使得制动体从释放位置移动到制动位置时,即使第一控制元件保持在加载位置,制动释放机构也能够将制动体从制动位置调节到释放位置。换言之,制动体在力传递链中朝向第一控制元件移动。
为了促进将制动体调节到释放位置,可以设置朝向第一控制元件对制动体施力的第二弹性部件。特别地,如果制动体位于第一控制元件的正下方,这可能是有用的,以此方式,能够选择第二弹性部件来克服制动体或制动控制元件的重量的力。
为了将制动体调节到释放位置,特别是为了建立和中断第一控制元件与制动控制元件之间的力传递,制动释放机构可以引起制动控制元件和第一控制元件之间的相对转动、特别是绕控制轴线的相对转动。特别地,这种类型的制动释放机构可以是特别紧凑的结构。
在本发明的另一实施方式中,所述制动释放机构还可以包括:用于由使用者手动致动的致动部、能够通过所述致动部而沿着所述控制轴线移动的第二控制元件、以及将所述第二控制元件的位移运动转换成所述第一控制元件的转动运动的控制部。特别地,如果第一控制元件的所述转动运动改变第一控制元件和制动控制元件之间的联接、例如在用于将来自第一控制元件的运动力朝向制动位置传递到制动控制元件的状态和在用于消除该力传递的状态之间改变该联接,则本实施方式是有利的,以此方式,制动控制元件能够接近第一控制元件。
本发明的另一实施方式提供了:所述操作控制器还包括脚部,所述载荷输入部相对于所述脚部可转动地安装,并且所述制动释放机构包括用于由使用者手动致动的致动部,所述致动部能够与所述载荷输入部一起相对于所述脚部转动。以这种方式,能够使坐在或支撑在载荷输入部上的人总是在相同位置找到致动部,该相同位置相对于脚部独立于载荷输入部的当前转动位置并且可选地还独立于载荷输入部的竖直调节。如果例如办公椅的座椅设置于载荷输入部,则致动部与座椅和载荷输入部一起转动并一起上升/下降,并且致动部总是位于相对于坐在其上的人的相同位置,以这种方式致动部能够被可靠地致动。
为了操作简单,致动部可以是杆,该杆的杆枢转点在这种情况下能够与载荷输入部一起相对于脚部转动。杆的转动轴线能够平行于载荷输入部的相对于脚部的转动轴线地延伸。可选地,致动部可以具有线缆牵引机构,该线缆牵引机构包括在线缆引导件中受到引导的牵引线缆,在这种情况下线缆引导件可以与载荷输入部一起相对于脚部转动。在选择致动部的运动路径方面线缆牵引机构能够增加结构的自由度。作为另一可选方案,能够想到将传感装置等的机电致动器作为致动部。
载荷输入部可以相对于脚部绕控制轴线转动,并且在这种情况下,操作控制器可以具有能够绕该控制轴线转动的控制元件,以便在致动元件被使用者致动的状态下将制动体从制动位置调节到释放位置。为载荷输入部、脚部和控制元件的转动运动选择相同的轴线能够简化操作控制器的结构。
在本发明的另一优选实施方式中,所述操作控制器还包括长度调节机构,所述长度调节机构具有为了调节长度的目的能够选择性地相对于彼此移动或锁定的第一部分和第二部分,所述第一部分接收所述载荷输入部的加载力,并且所述第二部分在被锁定时将所述加载力向前传向所述制动体。以这种方式,能够设定载荷输入部的位置,并且能够设定例如椅座的高度。特别地,长度调节机构能够独立于载荷触发机构或制动释放机构地操作。因此,自动制动操作和制动释放机构的上述操作独立于长度调节机构的当前设定位置。因此在可滚动椅子的示例情况中,制动操作独立于椅子的设定的座高。
优选地,在刚刚说明的实施方式中,致动元件被固定到第一部分或者被以相对于第一部分转动接合的方式保持,以此方式,当第一部分移动时致动元件被拖动因而能够与载荷输入部一起移动。在这种情况下,坐在或支撑在载荷输入部上的人总是能够在与载荷输入部的相对于脚部的当前位置相独立的相同位置找到致动部。
长度调节机构可以包括气动活塞/气缸单元或液压活塞/气缸单元、特别是可锁定的气动弹簧。
本发明的另一方面提供可移动单元,其具有以所述可移动单元能够沿着地面移动的方式支撑所述可移动单元在地面上滚动或滑动的至少一个接地部件,所述可移动单元具有根据前述任一类型的发明的操作控制器,所述操作控制器被设定用于制动所述可移动单元的相对于地面的运动。通过这种类型的可移动单元,实现了与控制可移动单元沿着地面运动有关的上述效果和优点。应当注意,制动在本公开中的含义既包括使运动减速又包括使可移动单元完全停下。
在本发明的优选实施方式中,所述可移动单元是用滚轮行进的椅子、特别是办公椅,所述椅子包括用于接收加载力的座部、设置有作为接地部件的至少一个滚轮的脚部、载荷触发机构以及优选地集成于所述椅子的中央柱的所述操作控制器的其它功能性元件,其中所述椅子的中央柱提供了所述座部和所述脚部之间的支承连接。以这种方式,能够以在视觉上不明显的方式将操作控制器安装于椅子,并且通过中央柱能够确保将加载力有效地引入载荷触发机构。
在本发明的另一优选实施方式中,椅子可以在作为椅子的第一构造和作为站立辅助的第二构造之间调节。站立辅助在被使用者使用时被斜向下地加载。这引起当使用者斜靠于站立辅助时导致站立辅助滚动或滑动风险的水平的载荷分量。因此,不安全的、换言之没有制动的这种类型的站立辅助会导致事故。根据本发明,能够以使得向下作用的载荷分量足够用于使制动体被载荷触发机构自动地从释放位置调节到制动位置的方式设定操作控制器。因此,一旦使用者斜靠于站立辅助,则该家具自动制动并固定以防滚动。
附图说明
下面,参照附图通过实施方式更详细地说明本发明,其中:
图1是作为根据本发明的第一实施方式的可移动单元的椅子的图,
图2是图1所示的椅子的中央椅柱在椅子的空载状态下的截面图,截面包含中央柱的中央轴线,
图3是根据第一实施方式的椅子的第一控制元件的立体图,
图4是根据第一实施方式的椅子的第二控制元件的立体图,
图5是根据第一实施方式的椅子的制动控制元件的立体图,
图6是对应于图2的、但是在椅子的制动状态下的图,
图7是对应于图2的、但是在从制动位置进入释放位置的运动期间的中间状态下的图,
图8是对应于图2的、但是在制动体被调节到释放位置之后的加载状态下的图,
图9是对应于图2的、但是在加载力被移除之后并且重新达到根据图2的初始状态之前的中间状态的图,
图10是作为根据本发明的第二实施方式的可移动单元的椅子的细节图,
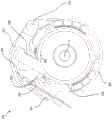
图11是沿着与图10中的控制轴线H正交地延伸的截面XI-XI的截面图,
图12给出了根据第二实施方式的第一控制元件和第二控制元件的立体图,
图13是对应于图11的、但是在非致动位置中的本发明的第三实施方式的截面图,以及
图14是对应于图13的、但是在致动位置中的图。
具体实施方式
作为根据本发明的实施方式的可移动单元的椅子在图1中作为整体地由10表示,并且椅子包括用于接收作为加载力K的使用者的重量的力的座部12、具有作为用于在地面U上滚动支撑椅子10的接地部件的多个滚轮16的脚部14、以及在座部12和脚部14之间竖直延伸的中央柱18。以已知的方式,座部12可以绕中央柱18的竖直主轴线H(中央柱18的中央轴线)相对于脚部14转动。此外,可以设置高度调节机构20,以设定座部12在地面U上方的高度。能够通过沿着主轴线H延伸并且以已知的方式通过第一致动杆24致动的已知的气动弹簧22进行高度调节。
根据本发明,椅子10还包括能够在制动位置和释放位置之间移动的制动体26,在制动位置中,制动体26接触地面U因而通过摩擦效应防止椅子10相对于地面U的运动、特别是防止椅子10滚动;在释放位置中,制动体26不接触地面U或者不有效地接触地面U,换言之,制动体26充分地退避到距地面U的预定距离处。
制动体26是操作控制器28的一部分,操作控制器28大部分集成于中央柱18中并且操作控制器28控制制动体26在制动位置和释放位置之间的调节。下面参照图2至图9说明操作控制器28的结构和操作。
操作控制器28的一部分是气动弹簧22,气动弹簧22包括能够相对于彼此轴向移位并且能够锁定在选择的移位位置中的第一部分30和第二部分32。第一部分30和第二部分32通过致动触发元件34以已知的方式被锁定和解锁,特别是用于打开和关闭气动弹簧22的气动阀。触发元件34优选地以已知的类似方式由被使用者移动的第一致动杆24致动,以设定椅子10的高度。
气动弹簧22的第一部分30(在该示例中为气动弹簧22的缸体)在其上端处接收座部12,以此方式,由于使用者的重量的力而从上方作用于座部12的加载力K向下作用于第一部分30(同样参照示出了加载状态的图6)。
气动弹簧22被插入中央柱的圆筒状壳体38,第一部分30优选地能够绕主轴线H转动并且沿着主轴线H相对于壳体38移位。第二部分32在轴承40处以如下方式联接到第一控制元件42:第二部分32能够绕主轴线H相对于第一控制元件42转动但轴向不可移位地保持于第一控制元件42。第一控制元件42相应地被轴向不可移位地保持于壳体38中并且能够绕主轴线H转动。第一控制元件42可以作为套筒以如下方式被接收:当气动弹簧22收缩时,第一控制元件42还以可移位和可转动的方式接收气动弹簧22的第一部分30。
通过第一弹簧44,第一控制元件42能够被沿轴向向上施力。在这种情况下,能够看出当加载力K作用并且气动弹簧22被锁定时,第二部分32与第一弹簧44的力相反地向下移动并且第一控制元件42与第一弹簧44的力相反地向下移动。
为了将制动体26从释放位置调节到制动位置,第一控制元件42能够将运动力向下传递到制动控制元件46。制动体26固定到制动控制元件46或者形成于制动控制元件46。制动控制元件46优选地同样被可轴向移位地保持在中央柱18的壳体38中。优选地设置第二弹簧48,其对制动控制元件46沿轴向向上施力,因而将制动体26压到释放位置。
在示出的实施方式中,例如通过将气动弹簧22的第二部分32的下端引入制动控制元件46的中央开口50来实现制动控制元件46的轴向轴承。在制动控制元件46的内部,开口50被加宽以形成接收第二弹簧48的弹簧室52。在这种情况下,第二弹簧48一方面支承于弹簧室52的与开口50的边缘相邻的内壁,另一方面支承于轴向固定于第二部分32的端部的弹簧止动件、例如固定盘54。通过使制动控制元件46停止于相对于壳体固定的止动件56能够限制制动控制元件46的轴向向上的运动。
依据第一控制元件42绕主轴线H相对于制动控制元件46的转动位置,第一控制元件42能够向制动控制元件46传递朝向制动位置的运动力,或者力的传递被消除。参照图2、图3和图5说明该功能的可能的实施的示例。能够在第一控制元件42的面向制动控制元件46的下端观察到第一齿部58,能够在制动控制元件46的面向第一控制元件42的上端观察到第二齿部60。如果第一控制元件42被设定到使得第一齿部58的齿为第二齿部60的相对齿(opposite teeth)、换言之第一齿部58和第二齿部60不啮合的转动位置,则第一控制元件42能够通过齿部58、60的轴向端面之间的接触将加载力K向下传到制动控制元件46,因而将制动体26按压到地面U上。相比之下,如果第一控制元件42处于下使得第一齿部58的齿能够啮合在第二齿部60的齿隙中的转动位置,则第一控制元件42和制动控制元件46能够继续接近彼此。这意味着第一控制元件42能够独立于制动控制元件46的位置而在加载力K的作用下向下移动,直到第一控制元件42停止于相对于壳体固定的止动件(例如相对壳体固定的止动件56),因而加载力K被引入壳体并经由壳体被引入脚部14和滚轮16。另一方面,由于第一控制元件42和制动控制元件46之间的力传递消除,制动控制元件46能够通过第二弹簧48的力被向上移动,以此方式,制动体26上升离开地面U。随后,尽管持续施加加载力K,致动器仍处于释放位置(同样参照图8)。
因此,制动释放机构被实施为:第一控制元件42能够通过绕主轴线H转动而被调节到使得齿部58、60能够彼此啮合的位置,并且制动控制元件46向上移动以释放制动器。第一控制元件42的转动能够由使用者通过例如使用下面描述的致动机构致动第二致动杆62来触发。在该实施方式中,致动杆62的操作致动被转换成第二控制元件64的轴向位移,第二控制元件64以套筒的形式绕着主轴线H延伸并且配置于第一控制元件42的上方。因此,对致动杆62进行致动使第二控制元件64朝向第一控制元件42轴向移位。由于相对于壳体固定的纵向齿部(未示出)啮合在第二控制元件64的相应的纵向齿部66中,能够使用简单的部件实施能够轴向移位但不能转动的引导件。
第二控制元件64的轴向向下运动被转换成第一控制元件42的强制转动运动。该运动转换的发生是由于在第二控制元件64的下端的第一控制凸轮68与第一控制元件42的上端的第二控制凸轮70接合(参照图3和图4)。例如可以以大螺距螺纹(steep thread)的方式形成的控制凸轮68、70可以以如下方式形成:在第二控制元件64由于第二致动杆62的致动而轴向运动期间,使控制凸轮68、70通过齿部58和60的大约一半的齿分度(两个相邻齿之间的角距离)引起第一控制元件42的转动。
在第二致动杆62的致动结束并且第二致动杆62被释放之后,第二致动杆62返回到其初始位置。这能够通过第二致动杆62的重量的力或可选地在另一弹簧(未示出)的辅助下进行。第二致动杆62的返回伴随着第二控制元件64被竖直向上拉回。
最后,如果加载力K也被去除,则返回机构确保操作控制器28返回到根据图2的初始构造。因此,作为返回机构的一部分的第一弹簧44提升第一控制元件42回到第一控制元件的上位置。此外,返回机构使第一控制元件42绕主轴线H转动(反向转动)回到齿部58、60彼此不配合的初始位置,以此方式,如果新施加了加载力K,则该力从第一控制元件42传递到制动控制元件46。还能够想到第一控制元件42的该反向转动的不同变型。因此,如在具体的实施方式中所示的,可以设置扭转弹簧72,扭转弹簧72一方面作用于第一控制元件42,另一方面相对壳体38保持转动接合。可选地或另外地,如果第一弹簧44的一端保持转动接合于第一控制元件42并且第一弹簧44的另一端相对于壳体38保持转动接合,则也可以由第一弹簧44进行反向转动。在这种情况下,能够省略附加的扭转弹簧,并且第一弹簧44既作为压缩弹簧又作为扭转弹簧。在另一变型中,能够通过将控制凸轮68、70分别构造于第一控制元件42和第二控制元件64来确保反向转动,例如,控制凸轮以大螺距螺纹的形式形成并且通过彼此配合而啮合,以便均沿两个转动方向将力传递到另一方。
下面,参照图2和图6至图9更详细地说明根据实施方式的椅子10的操作模式。图2示出了在空载状态下的、换言之当没有加载力K作用于座部12时椅子10的操作控制器。在这种情况下,第一弹簧44将第一控制元件42保持在上位置,并且制动控制元件46同样被拉回到上位置,以此方式,制动体26不以有效制动的方式接触地面U。在该空载状态下,办公椅10例如能够自由地移位。如图6所示,一旦使用者坐在办公椅10上或者将其自身斜向下地支撑在办公椅10上,则加载力K经由座部12向下作用于气动弹簧22。通常保持在锁定状态(第一致动杆36未被致动;第一部分30和第二部分32被保持为相对于彼此不能移动)的气动弹簧22随后经由轴承40将加载力K传到第一控制元件42,以此方式,第一控制元件42向下移动。在该位置中,第一控制元件42的第一齿部58的齿与制动控制元件46的第二齿部60的齿相对地定位并形成力传递接触,以此方式,第一控制元件42向下按压制动控制元件46。因此,加载力K被传到制动体26并且使制动体26压靠地面U(图6)。加载力K越大,则经由制动体26的制动力越大。
如果使用者坐在椅子10上或向下斜靠在椅子10上,则会期望释放制动器以便使椅子10的滚动受到控制。为此,使用者简单地向上致动第二致动杆62,使第二控制元件64向下滑动。通过第一控制凸轮68和第二控制凸轮70之间的接合,该位移引起第一控制元件42绕主轴线H强制转动,直到第一控制元件42的第一齿部58的齿与制动控制元件46的第二齿部60中的齿隙精确地相对。图7示出了该运动的中间位置,其中第一控制元件42尚未完全转动。然而,一旦已经实现了齿配合,如图8所示,第一控制元件42和制动控制元件46之间的接触被消除,并且第一控制元件42能够进一步向下移动,直到或通过停止在相对于壳体固定的止动件56从而第一控制元件42的进一步向下运动被阻碍。随后,加载力K经由相对于壳体固定的止动件56被引入壳体38,并从所述壳体进入椅子10的脚部14和滚轮16中。同时,由于第二弹簧48的作用,上述齿配合使得制动控制元件46能够向上运动,因此还使得制动体26能够向上运动,直到与地面U的制动接触被消除。因此制动器被释放,并且椅子10能够通过滚轮16而沿着地面U移动(图8)。
如果使用者随后从椅子10站起和/或大部分地移除加载力K,则第一弹簧44将第一控制元件42轴向地设定到上位置。该向上运动的中间状态如图9所示。同时,在该向上运动的最后部分的任何情况中,返回机构(例如扭转弹簧72或第一弹簧44)使第一控制元件42转动回到其初始位置中,其中第一齿部58的齿为第二齿部60的相对齿,以此方式,再次设定了图2所示的构造。因此,椅子10再次处于初始位置并且准备制动,以此方式,如果新施加了装载力K,则制动体26立即被第一控制元件42再次设定到制动位置。
本发明不限于上述实施方式。因此,代替气动弹簧22,能够发生从座部12到第一控制元件42的刚性传动,或者可以使用任意其它的长度调节机构。第一控制元件42的用于建立或释放第一控制元件42和制动控制元件46之间的力传递的机构也通过示例的方式在以上列出,但还能够使用不同的机构来实现。还能够设想对第一控制元件42和制动控制元件46之间的联接以及椅子10的高度二者进行电子调节。
此外,制动体26不需要直接支承在地面U上,而是可以替代地制动一个或多个滚轮16。
椅子10可以以如下方式构造:一方面能够用作为座,使得使用者坐在座部12上,另一方面能够用作为站立辅助,使得使用者在站立时能够斜靠于椅子10。为此,可以在椅子上安装能够在背部区域支撑站立的人的斜靠部(未示出)。斜靠部可以在坐姿构造和站姿构造之间调节,在坐姿构造中坐在座部12上的人能够将他的背部斜靠在斜靠部上,在站姿构造中斜靠部能够在背部区域支撑站在椅子10旁边的使用者。因此,在不调节椅子10的座高的情况下,椅子10就能够在坐姿构造和站姿构造之间调节。
图10示出了作为根据本发明的第二实施方式的可移动单元的椅子的控制元件128。第二实施方式与第一实施方式在许多方面相同,用增大了100的附图标记表示相似或对应的元件或特征。下面,仅说明与第一实施方式的不同点,其他元件和特征参照第一实施方式的说明。
在第二实施方式中,用于致动制动释放机构、特别是用于释放第一实施方式所述类型的制动元件而设置的致动杆162不被保持于相对脚部114固定的壳体,而是能够相对于脚部114转动。为此,致动杆162可枢转地保持于切换环(switching ring)180的杆轴163,该切换环180能够绕控制元件128的主轴线H转动地安装于致动壳体182。杆轴163和主轴线H间隔一定距离地相互平行地延伸。致动壳体182相应地可以以转动接合方式连接到气动弹簧122的第一部分130;特别地,致动杆壳体182的内表面184可以经由压配合固定到气动弹簧122的第一部分130的外表面186。
另外如图11所示,在致动杆162绕杆轴163的枢转运动期间,致动杆162将设置于致动杆162并且具有齿形爪188的爪体187移入与切换套筒189的外齿部的卡合或者从与切换套筒189的外齿部的卡合中移出。如果爪188和切换套筒189卡合,则致动杆162在图11中的逆时针方向的向前运动随后引起致动杆162、切换环180和切换套筒189绕主轴线H的共同转动运动。第一弹簧190能够根据致动杆绕杆轴163的枢转运动朝向释放爪188与切换套筒189之间的卡合地对致动杆施力,以此方式,使用者移除使致动杆162绕杆轴163枢转的致动力。
爪188可以刚性地配置于爪体187,或可选地如图11所示地经由过载部件联接到爪体187。过载部件被实施为:爪188以有限的游隙可移动地安装于爪体187并被第二弹簧191朝向切换套筒189施力。如果在图11中的致动杆162已经逆时针枢转并且爪188和切换套筒189之间的卡合已经建立的状态下,超过预定过载力的异常大的力作用于切换套筒189和致动杆162之间(例如,如果使用者使致动杆162撞到障碍物),则该游隙大到足够抵抗第二弹簧191的力以使爪188和切换套筒189的齿部脱开接合。以这种方式,能够防止损坏制动释放机构的齿部或其他部分。
切换套筒189的转动运动被转换为第一控制元件142的转动运动,第一控制元件142作为制动释放机构的一部分负责通过提升制动控制元件以与上述第一实施方式相对应的方式释放制动器。在第二实施方式中,设置了第二控制元件164,第二控制元件164配置为与第一控制元件142同轴,并且例如通过使第二控制元件164的轴向肋168接合在第一控制元件142的轴向纵长开口170中来使第二控制元件164以转动接合但轴向可移位的方式联接到第一控制元件142。第二控制元件164相应地与切换套筒189转动接合或与切换套筒189形成为一体。
控制元件128的操作模式与第一实施方式的操作模式基本上区别于致动杆162的上述配置和操作的方式,特别是处于初始位置(无致动的情况下)的致动杆162相对于座部(载荷输入部)保持静止,换言之,当座部转动时致动杆162被拖着转动,并且在调节座部的高度期间与座部一起竖直移动。特别地,这通过承载了致动杆162的致动壳体182与气动弹簧122的第一部分130转动接合来实现,气动弹簧122的第一部分130也供座部固定(虽然在图10中未示出座部,但在这一点参照例如图1和图2以及也能够与第二实施方式中类似地使用的座部12)。正如已知的,气动弹簧122的第一部分130以能够在引导套筒中纵向移位和转动的方式被引导,以便能够调节座高和座椅可能的转动。致动杆162转动并因而与座椅一起升高,并且使使用者能够总是在相同的位置处访问致动杆162。
图13和图14示出了构成第二实施方式的变型的本发明的第三实施方式。用分别增大了200或100的附图标记表示与第一实施方式或第二实施方式相同或对应的元件和特征。下面,仅说明与第一实施方式或第二实施方式的不同点,其他元件和特征参照第一实施方式或第二实施方式的说明。
在第三实施方式中,包括了在线缆引导件293中被引导的牵引线缆292的鲍登缆线配置(Bowden cable arrangement)取代了第二实施方式的致动杆162。线缆引导件293刚性地设置于致动壳体282,致动壳体282相应地能够以上述第二实施方式所述的方式形成并且固定到气动弹簧的第一部分,以此方式,致动壳体282能够与座部一起转动。牵引线缆292的端体294被钩在爪体287中,爪体287的其余的构造和操作对应于第二实施方式的爪体187,特别是爪体287能够绕设置于切换环280的杆轴263枢转。以第二实施方式所述的方式再次将切换环280能够绕控制轴线H转动地安装于致动壳体282。
安装到爪体287的、优选地经由第二实施方式所述类型的过载部件联接到爪体287的爪288与切换套筒289的卡合齿部(图13和图14中未示出)接合,以便最终将爪288拖入鲍登缆线的持续牵引运动中。在图14所示的致动位置中,牵引线缆292随后向前牵引爪体287并且引起爪体287、爪288、切换环280和切换套筒289的绕控制轴线H的共同转动运动,以释放制动器。在鲍登线缆配置被释放之后,复位弹簧295使切换环280和爪体再次转动回到其初始位置。
在第三实施方式中,可以开发鲍登缆线的长度和延伸路径的灵活性,以便将致动元件(未示出)定位于使用者能够轻松访问的椅子的适当位置处,其中鲍登缆线配置能够经由该致动元件致动。例如,致动元件可以配置于座椅部件。
除此以外,第三实施方式的控制装置的操作与第一实施方式或第二实施方式的操作相同。
Claims (21)
1.一种操作控制器,其包括:
制动体(26),其能够在制动位置和释放位置之间调节,在所述制动位置中所述制动体(26)与制动表面(U)摩擦接触,在所述释放位置中所述制动体(26)被从所述制动表面(U)拉回;
载荷输入部(22;122),其被设定成接收来自使用者的加载力(K);以及
载荷触发机构(42;142),其将作用于所述载荷输入部(22;122)的加载力(K)转换为所述制动体(26)的从所述释放位置到所述制动位置的调节运动,
其特征在于,所述操作控制器还包括制动释放机构,其被设定成在所述加载力(K)作用于所述载荷输入部(22;122)的状态下能够将所述制动体(26)从所述制动位置调节到所述释放位置,
所述载荷触发机构包括第一控制元件,所述第一控制元件能够通过所述加载力(K)的作用沿着控制轴线(H)移动,
所述制动释放机构还包括:用于由使用者手动致动的致动部、能够通过所述致动部而沿着所述控制轴线(H)移动的第二控制元件(64)、以及将所述第二控制元件的位移运动转换成所述第一控制元件的转动运动的控制部(68、70)。
2.根据权利要求1所述的操作控制器,其特征在于,所述操作控制器还包括退回机构(44、72),如果所述加载力(K)被移除,则所述退回机构(44、72)使所述载荷触发机构(42;142)回到初始状态,以此方式,所述载荷触发机构(42;142)随后将新作用于所述载荷输入部(22;122)的加载力(K)转换为所述制动体(26)的从所述释放位置到所述制动位置的调节运动。
3.根据权利要求1或2所述的操作控制器,其特征在于,所述制动体(26)当从所述释放位置移动到所述制动位置时向下移动。
4.根据权利要求1所述的操作控制器,其特征在于,所述第一控制元件被第一弹性部件(44)沿与所述加载力(K)相反的方向施力。
5.根据权利要求1所述的操作控制器,其特征在于,所述第一控制元件将所述加载力(K)传递到制动控制元件(46),所述制动体(26)形成于所述制动控制元件(46)或者所述制动体(26)由所述制动控制元件(46)移动。
6.根据权利要求5所述的操作控制器,其特征在于,所述制动释放机构被设定成以使得所述制动体(26)和所述第一控制元件之间的距离变小的方式调节所述制动控制元件(46)的从所述制动位置到所述释放位置的运动。
7.根据权利要求1所述的操作控制器,其特征在于,所述制动体(26)被第二弹性部件(48)朝向所述第一控制元件施力。
8.根据权利要求5所述的操作控制器,其特征在于,所述制动释放机构引起所述制动控制元件(46)和所述第一控制元件之间的相对转动。
9.根据权利要求1或2所述的操作控制器,其特征在于,所述操作控制器还包括脚部,所述载荷输入部相对于所述脚部安装为可转动的,并且所述制动释放机构包括用于由使用者手动致动的致动部,所述致动部(162)能够与所述载荷输入部一起相对于所述脚部转动。
10.根据权利要求9所述的操作控制器,其特征在于,所述致动部为杆,所述杆的杆枢转点能够与所述载荷输入部一起相对于所述脚部转动。
11.根据权利要求9所述的操作控制器,其特征在于,所述致动部具有线缆牵引机构,所述线缆牵引机构包括在线缆引导件中被引导的牵引线缆,在这种情况下,所述线缆引导件能够与所述载荷输入部一起相对于所述脚部转动。
12.根据权利要求9所述的操作控制器,其特征在于,所述载荷输入部能够绕控制轴线(H)相对于所述脚部转动,所述操作控制器具有能够绕该控制轴线(H)转动的控制元件(142),以便当使用者对致动元件进行致动时将所述制动体从所述制动位置调节到所述释放位置。
13.根据权利要求1或2所述的操作控制器,其特征在于,所述操作控制器还包括长度调节机构,所述长度调节机构具有为了调节长度的目的而能够选择性地相对于彼此移动或锁定的第一部分(30;130)和第二部分(32),所述第一部分(30;130)接收所述载荷输入部的加载力(K)或形成所述载荷输入部,并且所述第二部分(32)在被锁定时将所述加载力(K)向前传向所述制动体。
14.根据权利要求13所述的操作控制器,其特征在于,致动元件被固定到所述第一部分(30;130)或者所述致动元件相对于所述第一部分(30;130)被可转动接合地保持。
15.根据权利要求13所述的操作控制器,其特征在于,所述长度调节机构是气动活塞和气缸单元或液压活塞和气缸单元。
16.根据权利要求15所述的操作控制器,其特征在于,所述长度调节机构是可锁定的气动弹簧。
17.一种可移动单元(10),其具有支撑所述可移动单元(10)在地面(U)上滚动或滑动的至少一个接地部件(16),以此方式,所述可移动单元(10)能够沿着所述地面(U)移动,所述可移动单元(10)具有根据前述权利要求中任一项所述的操作控制器,所述操作控制器被设定用于制动所述可移动单元(10)的相对于所述地面(U)的运动。
18.根据权利要求17所述的可移动单元(10),其特征在于,所述可移动单元(10)是用滚轮(16)行进的椅子,所述椅子包括用于接收加载力(K)的座部(12)、设置有作为接地部件的至少一个滚轮(16)的脚部(14;114)和载荷触发机构(42;142)。
19.根据权利要求18所述的可移动单元(10),其特征在于,所述椅子是办公椅。
20.根据权利要求18所述的可移动单元(10),其特征在于,所述椅子还包括集成于所述椅子的中央柱(18)的所述操作控制器的制动体、制动控制元件、制动释放机构、载荷输入部、轴承、退回机构、止动件,其中所述椅子的中央柱(18)提供了所述座部(12)和所述脚部(14;114)之间的支承连接。
21.根据权利要求18至20中任一项所述的可移动单元(10),其特征在于,所述椅子能够在作为椅子的第一构造和作为站立辅助的第二构造之间调节。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016220881 | 2016-10-24 | ||
| DE102016220881.0 | 2016-10-24 | ||
| DE102017208151.1 | 2017-05-15 | ||
| DE102017208151.1A DE102017208151A1 (de) | 2016-10-24 | 2017-05-15 | Stellvorrichtung zur Betätigung einer Bremse und mobile Einheit, insbesondere Stuhl |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107975552A CN107975552A (zh) | 2018-05-01 |
| CN107975552B true CN107975552B (zh) | 2020-12-04 |
Family
ID=61866046
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201711003778.8A Expired - Fee Related CN107975552B (zh) | 2016-10-24 | 2017-10-24 | 用于致动制动器的操作控制器和特别是椅子的可移动单元 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10399383B2 (zh) |
| JP (1) | JP7264586B2 (zh) |
| CN (1) | CN107975552B (zh) |
| DE (1) | DE102017208151A1 (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202018100807U1 (de) | 2018-02-14 | 2018-04-03 | Kinema Gmbh | Sitz- und Stützmöbel |
| CN109663300A (zh) * | 2018-12-11 | 2019-04-23 | 刘风怡 | 一种体育用胸部锻炼仪器 |
| DE102019113240A1 (de) * | 2019-05-20 | 2020-11-26 | Bock 1 Gmbh & Co. Kg | Trägerbauteil für eine Sitzvorrichtung |
| US11833105B1 (en) * | 2021-01-24 | 2023-12-05 | Jeffrey C. Roach LLC | Omnidirectional safety walker |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2256336A1 (de) * | 1972-11-16 | 1974-05-22 | Siemens Ag | Fahrbarer arbeitsstuhl, insbesondere fuer zahnaerzte |
| US4434808A (en) * | 1982-06-18 | 1984-03-06 | Burak Mark G | Anti-skid device for a cane, crutch, or the like |
| JPS59150345U (ja) * | 1983-03-29 | 1984-10-08 | 朝比奈 冨士男 | 椅子 |
| US4977914A (en) * | 1989-07-20 | 1990-12-18 | Smerker Charles W | Slip resistent apparatus for canes, crutches and walkers |
| US5392800A (en) * | 1992-09-09 | 1995-02-28 | Sergi; Michael V. | Multi-purpose cane device |
| US5640985A (en) * | 1994-09-21 | 1997-06-24 | Profit Building Services, Inc. | Cane with grasping apparatus |
| JPH09276069A (ja) * | 1996-04-17 | 1997-10-28 | Nobuyuki Suzuki | スプリングを設けたキャスター付椅子 |
| JP3037464U (ja) * | 1996-11-05 | 1997-05-16 | タカラベルモント株式会社 | 術者椅子の固定装置 |
| US5740825A (en) * | 1997-02-12 | 1998-04-21 | Brunengo; P. J. | Articulated stair walker |
| DE19853981B4 (de) * | 1997-11-21 | 2017-01-05 | Johnson Controls Components Gmbh & Co. Kg | Kraftfahrzeugsitz |
| IT1320403B1 (it) * | 2000-06-06 | 2003-11-26 | Pro Cord Srl | Sedia con sedile e schienale oscillanti in modo sincronizzato. |
| US7234775B2 (en) * | 2002-06-18 | 2007-06-26 | Hector Serber | Dynamically balanced seat assembly having independently and arcuately movable seat and backrest and method |
| KR100510099B1 (ko) * | 2003-05-23 | 2005-08-23 | 주식회사 맨플러스 | 등받이가 자동으로 이동조절되는 의자 |
| KR100640779B1 (ko) * | 2005-06-28 | 2006-11-01 | 주식회사 한국가스스프링 | 이동 방지 기능을 갖는 의자용 가스실린더 |
| US7552970B2 (en) * | 2006-07-11 | 2009-06-30 | La-Z-Boy Incorporated | Furniture mechanism with tilt cam for multiple position tilt |
| CN201051917Y (zh) * | 2007-07-12 | 2008-04-30 | 大连北柳咨询服务有限公司 | 防滑拐杖 |
| IT1400224B1 (it) * | 2010-04-15 | 2013-05-24 | Brevi Srl | Sedia trasformabile in seggiolone per bambini |
| KR20140075536A (ko) * | 2012-12-11 | 2014-06-19 | 손하누리 | 실내외 겸용 목발 |
-
2017
- 2017-05-15 DE DE102017208151.1A patent/DE102017208151A1/de active Pending
- 2017-10-23 US US15/791,215 patent/US10399383B2/en not_active Expired - Fee Related
- 2017-10-23 JP JP2017204231A patent/JP7264586B2/ja active Active
- 2017-10-24 CN CN201711003778.8A patent/CN107975552B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP7264586B2 (ja) | 2023-04-25 |
| JP2018069058A (ja) | 2018-05-10 |
| DE102017208151A1 (de) | 2018-04-26 |
| CN107975552A (zh) | 2018-05-01 |
| US20180111417A1 (en) | 2018-04-26 |
| US10399383B2 (en) | 2019-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107975552B (zh) | 用于致动制动器的操作控制器和特别是椅子的可移动单元 | |
| US8025334B2 (en) | Piece of furniture | |
| US6631952B1 (en) | Automobile seat | |
| US8789662B2 (en) | Wheeled carriage with brake lock system | |
| US9913769B2 (en) | Item of seating furniture | |
| US5992815A (en) | Height-adjustable column with a transmitting mechanism | |
| US20020053824A1 (en) | Manual lever drive for adjusting devices on seats, in particular, motor vehicles seats | |
| JP7677788B2 (ja) | 座席シート、特に子供用ハイチェア | |
| US10266270B2 (en) | Locking system for articulating aircraft seat | |
| AU2019336344B2 (en) | A tilt lock mechanism for a tilting wheelchair seat | |
| US11937708B2 (en) | Seating and support furniture | |
| EP3311703A1 (de) | Stellvorrichtung zur betätigung einer bremse und mobile einheit, insbesondere stuhl | |
| KR20180125809A (ko) | 휠체어용 브레이크 유닛 | |
| WO2011004178A1 (en) | Braking system for transportation device | |
| WO2013018869A1 (ja) | 車両用シート | |
| US7419219B2 (en) | Adjustable arm assembly for a chair | |
| EP2893842A2 (de) | Sitz-/Liegemöbel | |
| GB2346082A (en) | Height-adjustable seat for a vehicle | |
| KR101982321B1 (ko) | 휠체어용 브레이크 유닛 착탈 키트 | |
| NL1037497C2 (nl) | Stoel. | |
| KR200426374Y1 (ko) | 휠체어의 의자 경사 각도 조절장치 | |
| NL1026111C1 (nl) | Trippelstoel onderstel met elektrische zithoogteverstelling en elektrische reminrichting. | |
| EP1980445B1 (fr) | Repose-pieds réglable en hauteur | |
| US20070095612A1 (en) | Child safety stool | |
| CN112587319A (zh) | 移位装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20201204 |