CN107645465B - 对无线电信号进行定时和定位的方法和系统 - Google Patents
对无线电信号进行定时和定位的方法和系统 Download PDFInfo
- Publication number
- CN107645465B CN107645465B CN201710590891.4A CN201710590891A CN107645465B CN 107645465 B CN107645465 B CN 107645465B CN 201710590891 A CN201710590891 A CN 201710590891A CN 107645465 B CN107645465 B CN 107645465B
- Authority
- CN
- China
- Prior art keywords
- radio signal
- frequency
- time
- projection
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/10—Frequency-modulated carrier systems, i.e. using frequency-shift keying
- H04L27/103—Chirp modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/06—Position of source determined by co-ordinating a plurality of position lines defined by path-difference measurements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/69—Spread spectrum techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/02—Systems for determining distance or velocity not using reflection or reradiation using radio waves
- G01S11/026—Systems for determining distance or velocity not using reflection or reradiation using radio waves using moving transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0221—Receivers
- G01S5/02213—Receivers arranged in a network for determining the position of a transmitter
- G01S5/02216—Timing or synchronisation of the receivers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/003—Arrangements for allocating sub-channels of the transmission path
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/69—Spread spectrum techniques
- H04B2001/6912—Spread spectrum techniques using chirp
Abstract
对无线电信号进行定时和定位的方法和系统。一种在接收机中对无线电信号进行定时的方法,所述无线电信号在发射机中生成并从发射机发射,所述无线电信号包括一系列频率啁啾,系统包括:接收来自发射机的无线电信号;合成包括一系列频率啁啾的投影矢量,所述一系列频率啁啾是那些包括在无线电信号中的啁啾的复共轭映像,投影矢量相对于彼此时移确定的时间的移位间隔;将接收的无线电信号与投影矢量相乘并累积结果;对累积结果进行插值以确定峰时移。
Description
技术领域
本发明在实施例中与如下系统和方法相关,所述系统和方法用于精确地确定无线电信号到接收机的到达时间(TOA)以及通过组合在不同地点(site)处的到达时间的精确确定的对无线电发射机的定位。
背景技术
归功于在微电子学和通信系统中的最近的改进,大量的设备和对象已经嵌有电子器件、软件传感器和连接性装置,这允许所述大量的设备和对象收集和交换信息。对象的该网络称为物联网,或者IoT。
IoT对象通常是具有适度的能量资源的简单设备,因为它们必须依赖本地蓄电池(accumulator)或能量收获(energy harvesting)。因此它们需要符合这些条件的无线连接性技术方案。
低吞吐量长距离无线网络特别适合于IoT中的应用,特别是寻求低功率、长电池自主性(long battery autonomy)和低成本的情况。除了其他之外,通过专利申请EP2767847和EP2449690已知的LoRa通信系统使用啁啾扩频调制(chirp spread-spectrummodulation)来实现这些目标。
定位是物联网的发展的关键使能者(enabler)之一。存在对于用于移动节点的低功率、低复杂性的定位方法和设备的需要。
自相当长的时间以来,卫星定位系统是已知的。GP、Glonass和Galileo允许基于从其轨道是精确已知的空间载体的星座接收的信号的精确定时的移动节点的精确自定位。
尽管这些系统在许多方面已经极其成功,但是它们并非很好地适合于IoT的低功率范围段。特别地,信号的初始获取需要相当大的计算功率,并且室内接收仍然是非常困难的。早于卫星系统,基于无线电信号的定时的陆地的或海上定位系统也是已知的并且如今仍然使用。
基于无线电的定位常常从将对象链接到其位置已知的一些参考的无线电信号的测量的到达时间导出对象的位置。如从EP2767848和EP2767847已知的那样,在LoRa系统中,可用如下方法来确定信号的到达时间,所述方法利用啁啾调制(chirp-modulation)中的时间和频率之间的对偶性(duality)。
设备侧定位和网络侧定位方法两者都是本领域中已知的。在设备侧定位中,所述设备侧定位是在例如GPS中使用的变型,设备本身从多个信标接收无线电信号,并且,通过对它们进行定时来确定到信标的距离(range)和设备自身的位置而无需进一步的外部协助,而在网络侧定位中,请求其位置的设备发送从属于网络基础设施的多个固定站接收的的一个或若干个信号。在网络基础设施中计算距离和位置。
两种方法都有优点和缺点。然而,网络侧定位将计算中的大部分转移到网络结构中,其允许端节点的硬件的简化。网络侧定位允许仅传输节点的定位并且比设备侧变型更难以拥堵,这是安全应用中的优点。
然而,定位的两种变型都依赖于准确地确定无线电信号的到达时间。多路径总是存在于实际的通信信道中并且其使得定时的准确性降级。因此,存在对用于对无线电信号进行定时的方法和系统的需要,所述方法和系统对多路径比现有技术的方法和系统更鲁棒。
对无线电信号进行定时常常涉及在绝对时间轴上确定无线电信号的位置,其通过例如GPS授时(GPS- disciplined)时钟或两个相似信号之间的到达时间差的准确的时钟来确定。在两种情况下,信号的带宽越大,则定位将越容易。虽然零带宽CW信号没有时间结构并且基本上不可能精确定时,但是雷达系统通过使用非常短的宽带宽无线电脉冲实现了优秀的定时。
LoRa是扩频调制。然而,与使用几十MHz直至若干GHz带宽的雷达系统相比,LoRa的带宽相对较小:在大多数情况下大约125 kHz。因此,源自雷达应用的技术对LoRa信号并不是真正有效。特别地,LoRa信号持续长得多,并且信号的结构不允许在时域中解决(resolve)多路径。
根据传播条件和所寻求的精度,有效的定位通常要求30到300 ns的到达时间准确性。对于125 kHz的带宽,奈奎斯特采样的数据具有8微秒的分辨率,为目标分辨率的大约250倍。
由于LoRa是基于啁啾的扩频调制,所以可以从传入的信号的频率估计到达时间,由于多路径,所述传入的信号将是若干复指数信号的叠加。从这样的叠加提取个体分量的算法是已知的,例如超分辨率(super-resolution)MUSIC算法。然而,这些方法是计算上非常密集的,特别是,在其中矢量可以是非常长的,并且多路径分量的数量事先是未知的的我们的情况中。
US2014064337和WO0002325描述了将啁啾用于同步的接收机。
发明内容
本发明提出了在接收机中对无线电信号进行定时以及定位设备的方法,所述方法是相应的独立权利要求的对象。
附图说明
图1示意性地图示了符合本发明的无线网络的节点的结构。
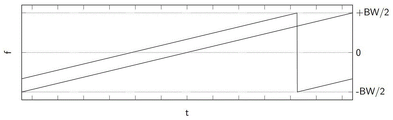
图2是根据本发明的一方面的基础啁啾(base chirp)和调制的啁啾的瞬时频率的绘图。相同信号的相位被绘制在图3中,而图4是在时域中的未调制的基础啁啾的实分量和复分量的绘图。
图5示意性地表示了根据本发明的方面的帧的结构;
图6示意性地呈现了本发明的定位系统。
图7图示了本发明的方面,即投影矢量的构造
图8和9图示了根据本发明的方面的接收频带到子频带的划分。
具体实施方式
LoRa调制的回顾
在欧洲专利申请EP2449690和EP2767848中描述了本发明中采用的啁啾调制技术的若干个方面,通过引用将欧洲专利申请EP2449690和EP2767848合并于此,并且将在这里概括地提到它们。
在图1中示意性地表示的无线电收发机是本发明的可能实施例的部分。其包括基带部分200和射频部分100。关注于发射机部分,基带调制器150基于在其输入处出现的数字数据152生成基带信号,所述基带信号的I和Q分量通过RF部分100被转换成期望的传输频率,由功率放大器120放大,并且通过天线传输。在不偏离本发明的框架的情况下,该架构允许若干个变型和修改,并且是非限制性示例。例如,收发机可以合成极分量幅度A和相位ϕ,而不是笛卡尔分量幅度I和Q。
在此示例中,通过在混合器110中将由放大器154提供的信号和由电路190生成的本地载波的同相和正交分量进行混合来完成信号从基带到预期频率的转换,并且该转换联系到参考时钟129。
一旦在无线电链路的另一端上接收到信号,就由图1的收发机的接收部分处理所述信号,图1的收发机的接收部分包括下变频级170之后的低噪声放大器160,下变频级170生成包括一系列啁啾的基带信号,然后所述基带信号由基带解调器180处理,基带解调器180的功能是调制器150的功能的反向,并提供重建的数字信号182。
如在EP2449690中讨论的那样,调制器150合成包括一系列啁啾的基带信号,一系列啁啾的频率沿着预定时间间隔从初始瞬时值 向最终瞬时频率
向最终瞬时频率 改变。为了简化描述,将假设所有的啁啾都具有相同的持续时间T,尽管这对本发明而言并不是绝对要求。可以通过啁啾的瞬时频率的时间轮廓(profile)
改变。为了简化描述,将假设所有的啁啾都具有相同的持续时间T,尽管这对本发明而言并不是绝对要求。可以通过啁啾的瞬时频率的时间轮廓(profile) 来描述或者也可以通过将信号的相位定义为时间的函数的函数
来描述或者也可以通过将信号的相位定义为时间的函数的函数 来描述所述啁啾。啁啾可以具有多个不同轮廓中的一个,每个对应于预定调制字母表(alphabet)中的符号。
来描述所述啁啾。啁啾可以具有多个不同轮廓中的一个,每个对应于预定调制字母表(alphabet)中的符号。
重要的是,包括在信号中的啁啾可以是具有具体的和预定义的频率轮廓(profile)的基础啁啾(还称为未调制的啁啾),或是可能的调制的啁啾的集合中的一个,可能的调制的啁啾通过对基础啁啾的频率轮廓进行循环时移获得。图2-3图示了基础啁啾和调制的啁啾的可能的频率和相位轮廓,而图4示出了在时域中的未调制的啁啾的实和虚分量I、Q。因此,由啁啾中的最高和最低频率之间的差确定调制的信号的带宽BW,并且调制的信号的带宽BW在调制的和未调制的啁啾中是相同的。图2表示其带宽在 和
和 之间延伸的基带信号,但是,当然,传输的信号将被转换到合适的频带。
之间延伸的基带信号,但是,当然,传输的信号将被转换到合适的频带。
在描绘的示例中,基础啁啾的频率从在 处的初始值
处的初始值 到在
到在 处的最终值
处的最终值 线性地增加,其中
线性地增加,其中 代表带宽扩展的量,但是下降的啁啾(descending chirps)或其他啁啾轮廓也是可能的。因此,信息以啁啾的形式进行编码,所述啁啾具有相对预定的基础啁啾的多个可能的循环移位中的一个,每个循环移位对应于可能的调制符号。
代表带宽扩展的量,但是下降的啁啾(descending chirps)或其他啁啾轮廓也是可能的。因此,信息以啁啾的形式进行编码,所述啁啾具有相对预定的基础啁啾的多个可能的循环移位中的一个,每个循环移位对应于可能的调制符号。
优选地,还将LoRa接收机和发射机布置成合成信号并在信号中插入共轭(conjugate)啁啾,所述共轭啁啾是基础未调制的啁啾的复共轭。可以将这些视为下啁啾(down-chirps),其中,频率从值 下降到
下降到 。优选地,由连续函数
。优选地,由连续函数 描述啁啾的相位,所述连续的函数
描述啁啾的相位,所述连续的函数 在啁啾的开始处和结尾处具有相同的值:
在啁啾的开始处和结尾处具有相同的值: 。由于这一点,信号的相位是跨符号边界连续的,即,在下文中将被称为符号间相位连续性的特征。在接收机中的解调器单元180可以将其时间参考与发射机的时间参考对准,并且确定施加到每个啁啾的循环移位的量。可以通过将接收的啁啾乘以本地生成的基础啁啾的复共轭并执行傅里叶变换来执行评估接收的啁啾相对于本地时间参考的时移的操作。傅里叶变换的最大值的位置指示移位和调制值。其他的解啁啾(dechirp)方法是可能的。将啁啾信号乘以基带符号的共轭的操作在下文中被称为“解啁啾”,并且以下的傅里叶变换被称为“解调”。
。由于这一点,信号的相位是跨符号边界连续的,即,在下文中将被称为符号间相位连续性的特征。在接收机中的解调器单元180可以将其时间参考与发射机的时间参考对准,并且确定施加到每个啁啾的循环移位的量。可以通过将接收的啁啾乘以本地生成的基础啁啾的复共轭并执行傅里叶变换来执行评估接收的啁啾相对于本地时间参考的时移的操作。傅里叶变换的最大值的位置指示移位和调制值。其他的解啁啾(dechirp)方法是可能的。将啁啾信号乘以基带符号的共轭的操作在下文中被称为“解啁啾”,并且以下的傅里叶变换被称为“解调”。
因此,在下文中可以使用“循环移位值”来指示在时域中的调制,并且“调制位置”或“峰位置”表示在频域中的调制。我们将用N表示符号的长度,或等价地,扩频因子,用 表示奈奎斯特采样频率以及用
表示奈奎斯特采样频率以及用 表示符号的长度。优选地,
表示符号的长度。优选地, 是二的幂。在可能的应用中,
是二的幂。在可能的应用中, 可能是125 KHz,并且
可能是125 KHz,并且 等于4096、2048、1024、512、256、128、64或32。载波频率可以在欧洲868MHz ISM频带中,或者在美国915MHz ISM频带中。
等于4096、2048、1024、512、256、128、64或32。载波频率可以在欧洲868MHz ISM频带中,或者在美国915MHz ISM频带中。
因此,调制的符号是基础符号的、在0和N-1之间的任何数的循环移位。调制值0相当于没有调制。由于N是二的幂,因此循环移位的值可以在 个比特上编码。
个比特上编码。
优选地,在帧中组织由本发明传输的和接收的信号,所述帧包括适当编码的前导和数据部分。前导和数据段包括一系列调制的和/或未调制的啁啾,其允许接收机将接收机的时间参考和发射机的时间参考进行时间对准、取回信息、执行动作等。帧的若干个结构是可能的。
图5 示意性地表示可以包括数据分组和/或测距(ranging)请求的帧的可能的结构。该结构具有前导,所述前导对于消息的解调并且对于若干个漂移源的补偿具有功能,如其将在后面被更好的解释的那样。帧的头部部分是包括帧目的的指示和具体接收方设备的标识地址的数据字段415。
图6表示根据本发明的定位系统的可能的架构。移动台510配备有LoRa发射机并且广播由多个LoRa接收机523接收的消息。接收机523中的每个具有对同步的时钟576的访问,所述同步的时钟576与所有其他接收机524的时钟是同步的,使得每个接收机可以基于公共的时间参考确定无线电信号的到达时间。可以通过任何合适的已知手段获得时钟同步。在可能的实现中,时钟576可以是GPS授时单元。
在接收到来自移动台510的LoRa信号时,接收机523中的每个以关于同步的时钟计算的其到达时间对LoRa信号盖“时间戳”,并且使时间戳对解算器(solver)560可用,所述解算器560基于关于时间戳编码的到达时间,以及基于接收机523的已知的位置,以已知的方式确定移动台510的位置。重要的是,一旦已经在接收机中对信号盖时间戳,就可以延迟和/或调节位置的实际计算。在图中,解算器560被表示为远程服务器,但是位置的确定可以在基础设施节点524中的任何基础设施节点、在移动节点中或在任何合适的计算单元中执行。
本发明的中心是在接收机中对信号进行定时或盖“时间戳”的方式,这些术语指示在接收机处基于合适的参考时钟确定和存储信号的精确的到达时间的动作。在本发明的框架中,这可以包括以下的操作中所有或一些操作:
粗同步
粗同步是以相应数字样本的电平同步由接收机521-524接收的信号和由发射机510合成的信号的操作。举个例子,在典型的LoRa信号中,将通过采样频率 对基带信号进行采样,并且每个符号,即每个啁啾,包括从128至4096个样本。每个样本具有
对基带信号进行采样,并且每个符号,即每个啁啾,包括从128至4096个样本。每个样本具有 的持续时间,其对应于2.4 km的信号的传播距离。
的持续时间,其对应于2.4 km的信号的传播距离。
可以通过若干种已知的方法执行粗同步,包括在前导中的检测符号411的处理(参见图5)。它是基础(即未调制的、或具有等于零的循环移位)符号的序列。在接收机中使用检测序列411来检测信号的开始,以及,优选地,执行其时间参考和在发射机中的时间参考的第一同步。通过对检测序列进行解啁啾,接收机确定移位量。
帧同步
帧同步是确定在帧中的样本和符号之间的对应关系的操作。如它可以是的情况,如果前导411包括16个未调制的啁啾,则帧同步相当于(amount to)在接收的采样的信号中定位帧边界,即样本的哪个间隔属于符号0、样本的哪个间隔属于符号1以及以此类推。
由一个或多个,优选地两个,帧同步符号412标记检测序列的结尾,所述帧同步符号412是以预定值调制的啁啾,例如具有调制值为4的第一啁啾、和具有相反的调制N-4的第二啁啾。优选地,在绝对移位中,帧同步符号的调制大于三个单位以将差错的可能性最小化。单个调制的符号作为帧同步标记的使用或相同的调制值用于若干个符号也是可能的,但不是最佳的。
频率同步
由于在啁啾中的时间频率对偶性,所以在接收机中和发射机中的时间基础的频率之间的任何漂移将导致到达时间的确定中的误差。时间和频率之间的关系涉及频率啁啾的斜率,以及,对于具有每个啁啾N=1024个样本和125 kHz的带宽的典型的LoRa信号而言,样本之间的频率步长是122 Hz。因此,122 Hz的频率漂移将转换为一个采样周期或8μs的时移,也就是在距离方面2.4 km。
虽然接收机的时钟576以优秀的精度和稳定性运动(sport),但是移动节点510倾向于是低成本设备并且配备有低劣的时钟,所述低劣的时钟的频率可以由于温度、老化、驱动电平以及许多其他干扰因素的改变而漂移。轻微的频率漂移不一定抑制LoRa信号的解调。然而,它们可以增加误差率(error rate),并且在测距和定位上具有非常负面的影响。由于这些原因,接收机521-524被优选地布置用于从接收的信号确定发射机的频率漂移并对所述频率漂移建模。
根据本发明的另一个方面,前导优选地包括频率同步符号413,所述频率同步符号413包括一个或多个,优选地两个啁啾,所述啁啾是基础未调制的啁啾的复共轭。可以由具有与基础啁啾不同的带宽或持续时间的啁啾替代共轭符号,因此表现出比基础啁啾的频率变化更快或更慢的频率变化。该变型将要求更加复杂的接收机,但是在另一方面,准许共轭啁啾自由地用于数据传输。由于啁啾的时间频率对偶性,所以调制的表观值(apparentvalue)将给出频率误差。为了使接收机在时间上对准,在符号413之后插入静音(silence)420。
然而,确定频率漂移的其他方法是可能的。
临时存储
在完成粗同步、帧同步和频率同步之后,本发明的接收机继续确定到达时间,如其将被详细说明的那样。本发明利用存在于啁啾信号中的时间和频率之间的直接关系并且从频率移位确定到达时间。
优选地,将接收的数字信号存储在合适的存储器区域中,并且对存储的信号执行精确定时。由于信号的采样是与精确时钟576同步的,所以GPS时钟的精度被传递到了样本,并且可以以要求的精度确定到达时间。在以下的示例中,在前导的检测部分411上完成定时,因为对未调制的数据工作更简单。然而,必须理解,该特征并不限制本发明。定时的方法事实上在其调制值已知的符号的任何序列上都将是可能的。可以在帧和频率同步之后完成存储,并且,优选地存储前导的全部长度。
精确定时
精确定时的目标是以足够用于定位目的的精度,即以大约4 ns的误差,确定信号的到达时间。这可以涉及若干个步骤。
改进定时的第一操作是精细的定时漂移补偿。如已经提到的那样,发射机的时间基础和接收机的时间基础的频率不完全相同,并且上面解释的频率同步允许估计误差的量。这可以针对改进的准确性来纠正。当通过解啁啾的方式提取信号的定时时,可以通过调整本地合成的共轭啁啾的斜率、初始频率和相位来补偿频率漂移。啁啾斜率调整与估计的频率误差成比例,并且针对所有符号可以是恒定的,或者,如果需要,可以针对每个符号适配。啁啾初始频率偏移与累积的定时误差成比例的量,所述累积的定时误差在每个符号处以与估计的频率误差成比例的步长渐进地增加。最后,可以调整相位,使得保留符号间相位连续性。由于LoRa前导信号相对长,(高达250 ms),所以定时漂移补偿允许整个前导或者前导的至少大部分的相干处理,并且帮助改进定时精度。
为了给出一些非限制性但是解释性的数字(figure),针对端点晶体误差(crystalerror)的典型规范是± 30ppm,并且针对基站的晶体误差的典型规范是± 1.5ppm。这意味着没有补偿的情况下并且在250ms之后,在端点和网关之间的最大定时误差可以是250ms× 31.5 10-6 = 8 μs。基站之间的最坏的误差可以是250 × 3 10-6= 0.75 μs,在光速时其仍然对应于225米。更重要的是,没有纠正定时漂移补偿的情况下,符号之间的相位相干性会丢失,因此精细的频率误差估计是不可能的,导致高达½× 125KHz的误差,其对应于1200米。
还可以通过对接收的信号进行插值获得定时漂移补偿,但是这在计算上是更昂贵的。
第二个有用的操作是精细的时间同步。初始时间同步对应于在前导的结尾处的时间同步,但是,由于频率漂移,所以在没有如下细化(refinement)的情况下不可能确切地同步整个前导,所述细化包括将定时漂移补偿应用于符号,然后通过解啁啾操作再次计算定时差。通常围绕0位置计算少量的谱系数(例如,3或5),因为预期残留(residual)的未对准是小的,并且通过插值确定傅里叶变换的峰。这是在前导的检测部分411上执行。
另一个有用的纠正是细化的频率同步。由于粗频率估计,所以我们有好的采样误差补偿。这允许前导的线性接收:可以使用在解啁啾和FFT——或在选择的仓(bin)上的DFT——之后的相位信息。在此步骤中,我们要么从最后步骤保存最高能量仓的相位,要么在定时补偿和细化的时间同步之后在每个符号上再次计算该DC仓。从这些值的相位估计残余频率误差。粗频率误差和残余频率误差的和是细化的频率误差估计。前导的检测部分可以高达10个符号,并且存在足够的处理增益来检测在第一和最后的符号之间的相位的5度变化,甚至在较低的灵敏度的边界处也有。
假设扩频因子SF12和125 KHz带宽,这转换为(5/360) / (10 × 4096) × 125⋅103 = 0.04 Hz的频率准确性。在扩频因子为SF7处,准确性将降到1.4Hz,仍然足以检测对应于每小时2 Km的速度的多普勒移位。因此,由于接收机的时间基础是通过GPS精确同步的,所以从在基站处确定的细化的频率同步估计移动源510的速度矢量是可能的。
为了确定频率移位,接收机合成用于对检测序列411进行解啁啾的第一投影矢量。优选地,在逐个符号的基础上适配投影矢量以便对于发射机的时钟的瞬时频率进行补偿,如在频率同步中确定的那样。这意味着第一投影矢量由一系列共轭啁啾(即如果基础啁啾是上啁啾,则下啁啾)组成,轻微对所述共轭啁啾的斜率进行适配以对应于发射机的瞬时频率。该适配的结果是,单个啁啾不是确切地相同,并且第一投影矢量的总体相位不是严格连续的:在符号边界处将存在小的不连续性。
图7绘制了第一投影矢量307的一部分的瞬时频率轮廓。个体符号纠正以该比例是不可感知的(appreciable)。优选地,接收机还合成是第一矢量的时移副本的提前的投影矢量305和延迟的投影矢量309。在图7中的时移被大大地夸大了,并且通常相当于一个样本( )或几个样本。按比例,移位可以是符号的宽度的1/128或1/4096。然而,本发明不限于三个投影矢量:可以合成更大的数量。
)或几个样本。按比例,移位可以是符号的宽度的1/128或1/4096。然而,本发明不限于三个投影矢量:可以合成更大的数量。
沿着投影矢量中的任何投影矢量的接收的信号的投影是对应样本的积的累积的和(内积)。与涉及将输入矢量乘以一个共轭啁啾并且然后执行傅里叶变换的标准的解啁啾过程相比,该投影仅产生变换的第一复系数。沿着提前的和延迟的矢量的投影提供附近的系数。以该方式获得关于傅里叶变换的恰好第一(very first)系数的信息。
如在普通的解啁啾中那样,由乘以共轭的信号的谱中的峰的位置给出时移。在初步的同步之后,期望时移小于一个采样周期。因此,三个最低频率谱分量的知识通常对于通过插值确定峰位置是足够的。
因此,通过若干个轻微移位的投影矢量乘以并累积接收的信号可以被认为是提取感兴趣的谱信息的方便的方式,而无需执行全傅里叶变换。然而,清楚的是,这不是执行本发明的相同的方式:存在其他数学上等价的算法并且包括于本发明中。
多路径
以上概述的方法允许在接收的信号和本地信号之间的几个Hz的级别的频率差的确定,其对精确同步是足够的。仍然,发明人已经频繁地观察到该确定在多路径的出现中较不可靠。原因在于接收的信号事实上是不同的指数的叠加,对于每个路径有一个指数。
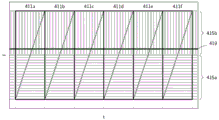
已经发现在多路径条件下仅使用可用带宽的一部分来计算时间戳是有利的。这个明显的矛盾的原因在于当多路径严重地使接收降级时,在竞争路径之间常常存在破坏性的干扰(destructive interference)。在该情况中,将存在信号几乎完全抵消(cancel)的带宽中的频率 (参见图8)。信道响应是平滑的并且表现低导数(derivative)绝对值,因为信号带宽低于信道相干带宽。因此,当信道响应幅度接近于零时,其相位基本上在此频率处切换符号。效果是减少和潜在地完全地抵消内积:在此频率以上的部分将与以下的部分相位相反。
(参见图8)。信道响应是平滑的并且表现低导数(derivative)绝对值,因为信号带宽低于信道相干带宽。因此,当信道响应幅度接近于零时,其相位基本上在此频率处切换符号。效果是减少和潜在地完全地抵消内积:在此频率以上的部分将与以下的部分相位相反。
图8图示了该情况。线419指示两个路径破坏性地干扰的频率。本发明通过将整个带宽划分为子频带415a、415b并在每个子频带中单独地执行定时过程来解决该情况。这可以通过在时间段中对输入缓冲器分片,或者通过选择性地置零(nulling)投影矢量的部分来完成。
每个子频带提供到达时间的独立的确定。非常经常地,这些部分措施(measure)优于可以在整个频带上获得的定时。原因在于破坏性干扰引入了在相位中的符号的改变,并且,当最大干扰的频率在频带的中心中时,在定时上的降级是最大的。由于信号带宽低于信道相干带宽,所以非常不太可能在符号中经历多于一个相位反转。
在图8的情况中,子频带415a比整个带宽产生更好的定时,因为排除了破坏性干扰的频率 ,但是子频带415b也比整个带宽更好,因为破坏性干扰的频率接近于边界并且远离子频带的中心。
,但是子频带415b也比整个带宽更好,因为破坏性干扰的频率接近于边界并且远离子频带的中心。
在本发明的框架中,还可能将带宽划分为多于两个子频带和/或拒绝其中多路径较重的子频带。这可以通过观察信号强度、或根据定时分散(dispersion)的统计分析、或通过任何其他合适的方式来决定。在图9的示例中,子频带415a和415c排除了频率 419。子频带415b是用于排除的候选者。
419。子频带415b是用于排除的候选者。
可以如下概述可能的多路径辨别过程:对于每个子频带415a-c执行定时过程,并且插值步骤为每个子频带提供相关峰的位置和幅度的估计。以相同的方式处理全频带并且还获取全频带相关峰的幅度和位置。由于子频带内积是完整内积的部分和,所以后者可以从子频带内积直接获得而无需在矢量因子上再次迭代。因此,可以以仅一次插值的额外成本计算全幅度和位置,这在复杂性方面是少得多的要求。为了在实际的示例上做比较,从3点的插值与抛物线拟合配合得很好(work well),其进行了数十次实值乘法。全频带的内积可以进行3个矢量×8个符号×4096个样本≈100000那样多的复值乘法和加法,即400000次实值复乘法加上200000次实值加法。因此,子频带分析的增加对计算负载的贡献可忽略不计。
当在频带中缺少相位反转时,子频带的绝对插值的幅度基本上总计为全频带的绝对插值的幅度。这是因为当不存在相位反转时,由于信道对频率在缓慢地移动,所以其相位导数几乎是恒定的。然后插值的延迟对应于与接收的信号对准的投影矢量。当存在相位反转时,绝对幅度不再合计(sum up),并且子频带的绝对幅度的和将高于全频带的绝对幅度。这同样适用于子频带的细分。这允许基于接收的信号的幅度在子频带中检测这种相位反转的发生。
本发明的子频带处理是高度可靠的,因为其受益于系统的处理增益。对于2个子频带,处理增益仅比全频带的处理增益低3dB。全频带的处理增益在15dB和36dB之间,这取决于扩频因子。已经证明该方法优于已知的盲信道均衡方法,特别是对于其中LoRa信号可以是在本底噪声(noise floor)以下若干个dB的长距离传输。
值得注意的是,鉴于LoRa信号的时间频率对偶性,该方法的子频带划分相当于时间划分。例如参照图8,清楚的是:子频带415a和415b将符号411a-f中的每个分割为相同大小的两个子符号。实际上,本发明的算法还可以按照子符号描述,其中接收的符号411a-411f中的每个被划分为子符号,并且在子符号中的每个中执行投影矢量与接收的矢量的乘法。
Claims (10)
1.一种在接收机中对无线电信号进行定时的方法,所述无线电信号在发射机中生成并从发射机传输,所述无线电信号包括一系列频率啁啾,系统包括:
-接收来自发射机的无线电信号;
-合成包括一系列频率啁啾的投影矢量,所述一系列频率啁啾是那些包括在无线电信号中的啁啾的复共轭映像,投影矢量相对于彼此时移确定的时间的移位间隔;
-通过将接收的无线电信号与投影矢量相乘并累积相应样本的积来计算接收的无线电信号的投影;
-对接收的无线电信号的投影进行插值以确定峰时移;
其中,投影矢量包括多个啁啾并且计算投影的步骤跨接收的无线电信号中的多个啁啾。
2.如权利要求1所述的方法,包括基于接收的无线电信号确定在包括于接收机中的本地时间参考和发射机的时间参考之间的时钟对应,并且基于时钟对应补偿在投影矢量中的啁啾的频率斜率和相位。
3.如权利要求1所述的方法,其中将接收的信号的带宽划分为子频带,在子频带中的每个中执行投影矢量与接收的矢量的乘法。
4.如权利要求3所述的方法,包括基于估计的多路径影响的在子频带结果和全频带结果之间的组合,其包括拒绝这些估计中的任何估计。
5.如权利要求4所述的方法,其中,在子频带中基于接收的信号的幅度估计多路径影响。
6.如权利要求1所述的方法,在存储的数字表示上继续进行将投影矢量与接收的无线电信号相乘的步骤。
7.如权利要求1所述的方法,其中,投影矢量包括与接收的无线电信号对准的一个第一投影矢量、相对于第一矢量提前的一个第二投影矢量、相对于第一投影矢量延迟的一个第三矢量。
8.如权利要求1所述的方法,包括在无线电信号中选择包括多个相同的频率啁啾的前导。
9.一种定位无线电的源的方法,其中无线电的源发出包括一系列频率啁啾的无线电信号,所述一系列频率啁啾的频率斜率和相位的参数被确定,包括:
-在多个间隔开的接收机中接收无线电信号,其中接收机具有对公共的时间参考或对多个同步的时间参考的访问,
-通过在前的权利要求中的任一项所述的方法在接收机中确定无线电信号的到达时间,
-基于到达时间定位无线电的源。
10.如权利要求9所述的方法,包括基于在接收机处确定的频率同步值来估计无线电的源的速度矢量。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16180271.5A EP3273607B1 (en) | 2016-07-20 | 2016-07-20 | Method and system of timing and localizing a radio signal |
| EP16180271.5 | 2016-07-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107645465A CN107645465A (zh) | 2018-01-30 |
| CN107645465B true CN107645465B (zh) | 2020-12-15 |
Family
ID=56571141
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710590891.4A Active CN107645465B (zh) | 2016-07-20 | 2017-07-19 | 对无线电信号进行定时和定位的方法和系统 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10746845B2 (zh) |
| EP (1) | EP3273607B1 (zh) |
| KR (1) | KR102132152B1 (zh) |
| CN (1) | CN107645465B (zh) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10079616B2 (en) | 2014-12-19 | 2018-09-18 | University Of Washington | Devices and methods for backscatter communication using one or more wireless communication protocols including bluetooth low energy examples |
| US10873363B2 (en) | 2015-08-12 | 2020-12-22 | University Of Washington | Backscatter devices and network systems incorporating backscatter devices |
| WO2017176772A1 (en) | 2016-04-04 | 2017-10-12 | University Of Washington | Backscatter devices and systems providing backscattered signals including ofdm packets |
| US10812130B2 (en) * | 2016-10-18 | 2020-10-20 | University Of Washington | Backscatter systems, devices, and techniques utilizing CSS modulation and/or higher order harmonic cancellation |
| WO2018187737A1 (en) | 2017-04-06 | 2018-10-11 | University Of Washington | Image and/or video transmission using backscatter devices |
| EP3685486A1 (en) | 2017-09-18 | 2020-07-29 | Semtech Corporation | System and method for wireless power transmission and communication |
| US11276938B2 (en) | 2018-01-11 | 2022-03-15 | Semtech Corporation | Single layer antenna |
| CN108594214B (zh) * | 2018-04-17 | 2022-03-22 | 西安电子科技大学 | 基于fpga的参数可调的线性调频信号产生装置及其产生方法 |
| CN108494885A (zh) * | 2018-05-15 | 2018-09-04 | 北京建工四建工程建设有限公司 | 一种基于LoRa的超高层建筑施工过程监测方法及系统 |
| US10327221B1 (en) | 2018-05-25 | 2019-06-18 | Apple Inc. | Super-resolution technique for time-of-arrival estimation |
| CN109121126B (zh) | 2018-08-10 | 2021-08-17 | Oppo广东移动通信有限公司 | 电子设备、消息推送方法及相关产品 |
| US10921436B2 (en) * | 2018-08-13 | 2021-02-16 | Nxp B.V. | MIMO radar coding for resolving velocity ambiguity |
| CN109166578B (zh) | 2018-08-14 | 2021-05-11 | Oppo广东移动通信有限公司 | 移动终端、语音控制方法及相关产品 |
| CN110430156B (zh) * | 2019-08-14 | 2021-06-01 | 北京智芯微电子科技有限公司 | 突发ofdm数据传输的帧同步方法及系统 |
| EP3836409A1 (en) * | 2019-12-11 | 2021-06-16 | Semtech Corporation | Low power long-range radio |
| WO2021134608A1 (zh) * | 2019-12-31 | 2021-07-08 | 华为技术有限公司 | 信号传输方法和装置 |
| FR3109681B1 (fr) * | 2020-04-23 | 2023-01-06 | Univ Bordeaux | Procédé d’estimation d’au moins une information de synchronisation d’un signal comprenant une pluralité de chirps, produit programme d’ordinateur et dispositif correspondants. |
| CN114355284B (zh) * | 2022-01-04 | 2023-05-05 | 电子科技大学 | 一种利用频谱主分量的时差估计方法 |
| CN114245455B (zh) * | 2022-01-06 | 2023-04-07 | 吉林大学 | 一种基于LoRa技术的无线定位时间同步方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000002325A1 (en) * | 1998-07-01 | 2000-01-13 | Zenith Electronics Corporation | Receiver synchronizer using chirps sequences |
| CN101657735A (zh) * | 2007-03-29 | 2010-02-24 | 国家宇宙研究中心 | 处理无线电导航信号的方法 |
| EP2767847A1 (en) * | 2013-02-14 | 2014-08-20 | Semtech Corporation | Ranging and positioning system |
| US9419785B1 (en) * | 2015-04-28 | 2016-08-16 | National Central University | Initial synchronization method and apparatus assisted by inherent diversity over time-varying frequency-selective fading channels |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5604765A (en) * | 1994-12-23 | 1997-02-18 | Stanford Telecommunications, Inc. | Position enhanced communication system including system for embedding CDMA navigation beacons under the communications signals of a wireless communication system |
| JPH09307526A (ja) * | 1996-05-17 | 1997-11-28 | Mitsubishi Electric Corp | デジタル放送受信機 |
| EP1720311B1 (en) * | 1997-11-05 | 2011-06-01 | Sony Deutschland Gmbh | Synchronisation of digital communication systems |
| US6133873A (en) * | 1998-06-03 | 2000-10-17 | Krasner; Norman F. | Method and apparatus for adaptively processing GPS signals in a GPS receiver |
| DE19961777A1 (de) * | 1999-12-21 | 2001-07-12 | Rudolf Bannasch | Verfahren und Vorrichtungen zur Informationsübertragung |
| US20030043947A1 (en) * | 2001-05-17 | 2003-03-06 | Ephi Zehavi | GFSK receiver |
| US7831004B2 (en) * | 2006-06-13 | 2010-11-09 | Panasonic Corporation | Synchronous detecting circuit |
| US7456785B2 (en) * | 2006-11-29 | 2008-11-25 | Transcore Link Logistics Corporation | Navigation signal differential acquisition method and systems therefor |
| US9088348B2 (en) * | 2007-06-18 | 2015-07-21 | Digi International Inc. | System and method for obtaining frequency and time synchronization in a wideband communication system |
| US8077820B2 (en) * | 2008-03-05 | 2011-12-13 | Agere Systems Inc. | Detection of frequency correction bursts and the like |
| EP2278724A1 (en) | 2009-07-02 | 2011-01-26 | Nanoscale Labs | Communications system |
| US8582698B2 (en) * | 2010-05-10 | 2013-11-12 | Telefonaktiebolaget Lm Ericsson (Publ) | Reduced complexity timing estimation for locating the position of a mobile terminal |
| US8976060B2 (en) * | 2011-05-23 | 2015-03-10 | Digi International Inc. | RF chirp signal propagation delay measurement |
| GB2494129B (en) * | 2011-08-30 | 2018-01-10 | Qualcomm Technologies Int Ltd | Chirp receiver |
| US8861568B2 (en) * | 2011-11-22 | 2014-10-14 | Novatel Inc. | Chirp receiver utilizing phase processed chirp signals |
| US8867588B2 (en) * | 2012-08-31 | 2014-10-21 | Cambridge Silicon Radio Limited | Chirp data channel synchronisation |
| US9083444B2 (en) * | 2013-03-12 | 2015-07-14 | Digi International Inc. | Chirp spread spectrum system and method |
| US9766321B2 (en) * | 2013-03-14 | 2017-09-19 | Digi International Inc. | Indoor positioning with radio frequency chirp signal propagation delay measurement |
| US9326295B1 (en) * | 2014-12-10 | 2016-04-26 | Sony Corporation | Method and apparatus for transmitting a-priori information in a communication system |
| EP3208946B1 (en) * | 2015-03-03 | 2021-05-05 | Semtech Corporation | Communication device and method in the cellular band |
| FR3052615B1 (fr) * | 2016-06-09 | 2019-11-01 | B-Com | Procede de demodulation d'un signal recu, produit programme d'ordinateur et dispositif correspondants |
-
2016
- 2016-07-20 EP EP16180271.5A patent/EP3273607B1/en active Active
-
2017
- 2017-06-16 US US15/625,560 patent/US10746845B2/en active Active
- 2017-07-14 KR KR1020170089421A patent/KR102132152B1/ko active IP Right Grant
- 2017-07-19 CN CN201710590891.4A patent/CN107645465B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000002325A1 (en) * | 1998-07-01 | 2000-01-13 | Zenith Electronics Corporation | Receiver synchronizer using chirps sequences |
| CN101657735A (zh) * | 2007-03-29 | 2010-02-24 | 国家宇宙研究中心 | 处理无线电导航信号的方法 |
| EP2767847A1 (en) * | 2013-02-14 | 2014-08-20 | Semtech Corporation | Ranging and positioning system |
| US9419785B1 (en) * | 2015-04-28 | 2016-08-16 | National Central University | Initial synchronization method and apparatus assisted by inherent diversity over time-varying frequency-selective fading channels |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3273607A1 (en) | 2018-01-24 |
| CN107645465A (zh) | 2018-01-30 |
| US10746845B2 (en) | 2020-08-18 |
| KR102132152B1 (ko) | 2020-07-09 |
| KR20180010141A (ko) | 2018-01-30 |
| US20180024224A1 (en) | 2018-01-25 |
| EP3273607B1 (en) | 2023-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107645465B (zh) | 对无线电信号进行定时和定位的方法和系统 | |
| US9295021B2 (en) | Measurement of time of arrival | |
| US9551786B2 (en) | Ranging and positioning system | |
| US9577702B2 (en) | Synchronization apparatus and method | |
| EP2549812B1 (en) | RF Fingerprinting for Location Estimate | |
| US9128182B2 (en) | Radar device | |
| US20100309051A1 (en) | Method and system for determining the position of a mobile device | |
| US11808835B2 (en) | Hybrid method for time-of-arrival-based ranging | |
| US7715499B2 (en) | Frequency compensated communications reception | |
| Ghany et al. | A robustness comparison of measured narrowband CSI vs RSSI for IoT localization | |
| CN112953593A (zh) | LoRa高级接收器 | |
| Wolf et al. | Improved multi-channel ranging precision bound for narrowband LPWAN in multipath scenarios | |
| US20220187443A1 (en) | Doppler ranging system | |
| US11026192B2 (en) | System and method to enhance ranging resolution for localization of a LoRa sensor or device | |
| Wolf et al. | Multi-Frequency Phase Difference of Arrival for precise localization in narrowband LPWA networks | |
| US11668785B2 (en) | Method for locating a connected object by phase differences of arrival in an LPWA network | |
| CN117761673A (zh) | 一种基于ofdm信号对微动目标位移测量的方法和系统 | |
| CN117639966A (zh) | 校准方法、信息传输方法、装置及通信设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |