CN107005023B - 激光传感器模块 - Google Patents
激光传感器模块 Download PDFInfo
- Publication number
- CN107005023B CN107005023B CN201580069482.9A CN201580069482A CN107005023B CN 107005023 B CN107005023 B CN 107005023B CN 201580069482 A CN201580069482 A CN 201580069482A CN 107005023 B CN107005023 B CN 107005023B
- Authority
- CN
- China
- Prior art keywords
- laser
- pulse
- surface emitting
- cavity surface
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000036278 prepulse Effects 0.000 claims abstract description 44
- 238000001514 detection method Methods 0.000 claims abstract description 22
- 230000003287 optical effect Effects 0.000 claims abstract description 19
- 238000000034 method Methods 0.000 claims abstract description 14
- 238000005259 measurement Methods 0.000 claims description 15
- 239000000758 substrate Substances 0.000 description 16
- JBRZTFJDHDCESZ-UHFFFAOYSA-N AsGa Chemical compound [As]#[Ga] JBRZTFJDHDCESZ-UHFFFAOYSA-N 0.000 description 8
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 7
- 238000013461 design Methods 0.000 description 6
- 239000000463 material Substances 0.000 description 5
- 230000017525 heat dissipation Effects 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000002310 reflectometry Methods 0.000 description 4
- 230000001934 delay Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 238000010521 absorption reaction Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 229910000980 Aluminium gallium arsenide Inorganic materials 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000002800 charge carrier Substances 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000003750 conditioning effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000005468 ion implantation Methods 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000002207 thermal evaporation Methods 0.000 description 1
- 238000002366 time-of-flight method Methods 0.000 description 1
Images

Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18361—Structure of the reflectors, e.g. hybrid mirrors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/06—Arrangements for controlling the laser output parameters, e.g. by operating on the active medium
- H01S5/062—Arrangements for controlling the laser output parameters, e.g. by operating on the active medium by varying the potential of the electrodes
- H01S5/06209—Arrangements for controlling the laser output parameters, e.g. by operating on the active medium by varying the potential of the electrodes in single-section lasers
- H01S5/06216—Pulse modulation or generation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/02—Structural details or components not essential to laser action
- H01S5/024—Arrangements for thermal management
- H01S5/02469—Passive cooling, e.g. where heat is removed by the housing as a whole or by a heat pipe without any active cooling element like a TEC
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18305—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL] with emission through the substrate, i.e. bottom emission
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/40—Arrangement of two or more semiconductor lasers, not provided for in groups H01S5/02 - H01S5/30
- H01S5/42—Arrays of surface emitting lasers
- H01S5/423—Arrays of surface emitting lasers having a vertical cavity
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/04—Processes or apparatus for excitation, e.g. pumping, e.g. by electron beams
- H01S5/042—Electrical excitation ; Circuits therefor
- H01S5/0428—Electrical excitation ; Circuits therefor for applying pulses to the laser
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/14—External cavity lasers
- H01S5/141—External cavity lasers using a wavelength selective device, e.g. a grating or etalon
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18386—Details of the emission surface for influencing the near- or far-field, e.g. a grating on the surface
Abstract
本发明描述了一种激光传感器模块,包括至少一个垂直腔表面发射激光器(100)以及至少一个驱动电路(120)。该驱动电路(120)适于向垂直腔表面发射激光器(100)提供电能,使得垂直腔表面发射激光器(100)发射与连续激光发射相比具有小于100ns的脉冲长度(356)和小于5%的占空比的激光脉冲(345)。该驱动电路(120)进一步适于在至少所述激光脉冲(345)的部分之前至少100ns向垂直腔表面发射激光器(100)提供附加能量,使得所述激光脉冲(345)的部分在限定的光学条件下发射。本发明进一步描述了一种包括激光传感器模块的距离检测设备以及一种驱动激光传感器模块的方法。附加能量优选地借助于在优选地每个激光脉冲(345)之前应用到V(E)CSEL的电流预脉冲(335)而提供。电流预脉冲优选地被布置成使得没有激光借助于V(E)CSEL发射。在限定的光学条件下,允许V(E)CSEL发射激光脉冲(345),使得激光脉冲(345)的发射时间和脉冲形状是明确限定的。激光脉冲(345)的明确限定的发射时间和脉冲形状允许可靠地检测反射的激光(117),其与对应的激光脉冲(345)的发射相应。
Description
技术领域
本发明涉及一种激光传感器模块、一种包括激光传感器模块的距离检测设备以及一种驱动激光传感器模块的方法。
背景技术
飞行时间方法是一种测量3D空间中的距离的既定方式;特别是在较长的距离上,该技术经常称为LIDAR(等效于RADAR)。发出光的短脉冲(1-10ns)或者脉冲序列(脉冲串),并且测量直到反射的光返回的时间。重复率相对较低以便限制总功率,但是必须足够高以便考虑到对于安全相关功能而言足够的扫描/帧速率。与扫描镜相结合,可以实现非常良好的角度分辨率。使用脉冲串是为了通过将发射的脉冲串的样式与接收的脉冲串的样式相比较而简化检测的激光的识别。所需的亮度只能通过专用的固态或者边缘发射激光器实现。
发明内容
因此,本发明的一个目的是提供一种改进的激光传感器模块。
依照第一方面,提供了一种用于飞行时间测量的激光传感器模块,其包括至少一个垂直腔表面发射激光器(VCSEL)或者垂直扩展腔表面发射激光器(VECSEL)以及至少一个驱动电路。该驱动电路适于向垂直腔表面发射激光器或者垂直扩展腔表面发射激光器提供电能,使得垂直腔表面发射激光器或者垂直扩展腔表面发射激光器发射与连续激光发射相比具有小于100ns的脉冲长度和小于5%的占空比的激光脉冲。该驱动电路进一步适于在至少所述激光脉冲的部分之前至少100ns向垂直腔表面发射激光器或者垂直扩展腔表面发射激光器提供附加能量,使得所述激光脉冲的部分在限定的光学条件下发射。
可以利用所述激光传感器模块执行的飞行时间测量需要高的射束质量。激光必须在精确的时刻发射。驱动电路提供的电脉冲与对应的激光脉冲之间的长的或者甚至变化的延迟必须避免。像抖动等等那样的激光脉冲的变动应当最小化。激光脉冲期间的功率输出必须相对稳定。在激光脉冲期间,VCSEL或者VECSEL (V(E)CSEL)必须在稳定模式下、优选地在基本模式下操作。射束质量是需要的,以便允许可靠地检测特定激光脉冲的反射的光。由于射束质量以及稳定激光模式的重要性,V(E)CSEL应当优选地为具有相对较小的直径和单模式发射的顶部发射器或者底部发射V(E)CSEL,即具有在例如20 - 500µm的大范围直径上实施几乎基本模式的发射的扩展腔。激光脉冲可以是单个脉冲或者脉冲的序列(脉冲串),其可以用来借助于脉冲串的样式识别发射的激光。
在小于5%的低占空比或者低于5MHz的重复频率结合小于100ns的短脉冲长度下操作的VCSEL的实验结果表明,VCSEL不提供可靠飞行时间测量所需的射束质量。甚至VCSEL与像平面镜那样的外部反馈元件的组合以便提供垂直扩展腔表面发射激光器(VECSEL)也不提供所需的射束质量。已经澄清,与外部反馈组合的VCSEL不一定被允许在没有外部反馈的反馈的情况下发射激光。可以通过实验证明,在标称激光脉冲之前,特定电流形状所表征的、驱动电路对附加能量的施加可以允许所述激光脉冲的部分内发射的激光,从而改进了借助于所述激光脉冲的部分而允许的到物体的距离的飞行时间测量。尤其是在激光脉冲开始时,所述附加能量似乎允许VCSEL的基本上没有抖动的单模式操作。激光脉冲的功率斜升遵循驱动电路提供的电流的形状,使得电脉冲与激光脉冲之间的延迟被避免或者至少最小化至可接受的水平。所述附加能量可以借助于光能或者优选地借助于电能提供,因为在VCSEL的发射路径内,尤其是在VCSEL的激光腔附近提供光能的像镜等等那样的附加技术措施和损耗可能太高。所述附加能量可以在每个激光脉冲或者VCSEL发射的激光脉冲的部分之前提供。
驱动电路可以包括包含一个或多个处理器或者微处理器以及一个或多个存储设备的任何电路装置,其在集成式布置中与所述至少一个V(E)CSEL一起提供或者在分布式布置中提供,在该分布式布置中,借助于包括驱动电路的功能的另一个设备电驱动V(E)CSEL。
激光脉冲可以具有小于100ns的脉冲长度,优选地小于20ns以及更优选地小于10ns的脉冲长度。激光脉冲的重复率或者频率适应于脉冲长度(或者反之亦然),从而满足关于占空比小于5%的条件。重复频率优选地低于1MHz或者甚至低于100kHz。占空比优选地可以小于VCSEL的连续波(cw)操作的1%或者0.2%。
驱动电路适于将预电流提供给垂直腔表面发射激光器,其中在所述激光脉冲的部分之前,不发射激光。
经由VCSEL的电极提供的预电流将附加能量提供给VCSEL,以便允许在激光脉冲发射期间实现稳态操作。实验研究表明,特别是对于小于20ns的短激光脉冲而言,在电脉冲的开始与激光脉冲的开始之间存在大幅的延迟。利用ns或者几十ns范畴的各种不同亚阈值预电流或者电流斜升方案的实验没有解决这个问题。在用于生成激光脉冲的电脉冲之前至少100ns,优选地至少0.5µs,最优选地至少1µs开始的预电流表现出激光稳定性的改进和延迟的降低。预电流适于使得在激光脉冲开始之前不久不生成激光以便避免必须检测的激光脉冲的上升激光斜率的检测中的模糊性。
预电流的开始时间和预电流期间提供的能量的量影响后续激光脉冲的射束质量和延迟。因此,人们相信,在以良好适应的方式提供的情况下,预电流跨垂直腔表面发射激光器的激光孔径提供平滑的温度轮廓(profile)或者更精确地说平滑的径向温度梯度,从而在激光孔径处形成热透镜。
激光孔径通过其中电荷载流子被注入底部和顶部镜之间的VCSEL的有源区的区域限定。激光孔径可以借助于用于电流约束的氧化物孔径或者用于约束电流的其他措施(例如电极的形状和位置和/或离子注入或者异质结构)限定。预电流由于欧姆损耗和生成的光子的吸收的原因而提供电流流动的区域的加热。借助于预电流生成的热量在开始预电流之后消散。一些微秒之后的温度轮廓取决于一定时间上积分的相对损耗功率。温度轮廓强烈取决于VCSEL的层结构、激光孔径的尺寸、层的厚度、层的材料、衬底的厚度、电极配置以及像例如散热器那样的散热的措施。提供平滑的温度轮廓或者更精确地说平滑的径向温度梯度所需的能量可以取决于激光脉冲的重复频率、脉冲长度和脉冲高度,或者更一般地说,VCSEL的热历史。借助于生成激光脉冲的电脉冲造成的欧姆以及还有光学损耗而提供的热能越多,则必须由预电流提供的能量越少。在高重复率下,仅仅在激光脉冲之间的每两个或三个间隔中提供预电流可能甚至是足够的。
结合热仿真的实验表明,跨构建热透镜的激光孔径的平滑的温度轮廓或者更精确地说平滑的径向温度梯度可以通过在所述激光脉冲的部分的发射开始时激光孔径的中心与激光孔径的边沿之间的温度差异为至少2K、优选地至少5K、最优选地至少10K进行表征。孔径的中心和边沿可以通过借助于VCSEL的一个或多个层的氧化或者如上所述的其他措施提供的当前孔径限定。
预电流可以包括在两个激光脉冲之间提供的恒定偏移或偏置电流。该偏移电流必须低于激光阈值以便避免在后续激光脉冲之前的激光发射。贯穿本申请,激光阈值被限定为在V(E)CSEL在后续激光脉冲中借助于预电流而最佳地准备的情况下开始激光发射所需的电流。偏移电流优选地低于激光阈值电流的50%,更优选地低于激光阈值电流的30%,最优选地低于激光阈值电流的20%。恒定偏移电流可以容易地实现,但是可能需要更多的能量以便生成所需的温度轮廓。恒定偏移电流在1%与5%之间的相对较高的占空比下可能是有利的,其中可能需要较少的能量以便生成平滑的温度轮廓或者更精确地说平滑的径向温度梯度,并且其中后续激光脉冲之间的时间段更短。如果对于更多能量的需要以及相关的更高的热损耗例如在低于激光器的最佳操作范围的环境温度下不被认为是缺点,那么偏移电流也是有利的。在这种情况下,额外的能量帮助将激光器稳定在其优选的温度下。
在一种可替换的方法中,预电流可以包括两个后续激光脉冲之间的至少一个电流预脉冲。电流预脉冲借助于比两个后续激光脉冲之间的时段更短的脉冲长度表征。在所述两个后续激光脉冲的第一激光脉冲与电流预脉冲之间至少存在一定间隙,其中没有电流借助于驱动电路提供给VCSEL。电流预脉冲的脉冲形状可以具有可以适合在如上面所讨论的激光脉冲期间允许稳定激光发射的任何形状。预电流可以包括一个、两个、三个或者更多电流预脉冲(脉冲串)。电流预脉冲可以具有这样的优点:能量可以以非常受控的方式提供,使得允许稳定且可靠的激光脉冲所需的能量最小化。电流预脉冲的定时、数量,电流预脉冲的脉冲形状和长度可以适应于对应的VCSEL的物理边界条件,如VCSEL的层结构、激光孔径的尺寸、层的厚度、层的材料、衬底的厚度、电极配置以及像例如散热器等等那样的散热的措施。也可以可能将偏移电流和电流预脉冲相结合。
结合仿真的实验结果表明,电流预脉冲必须在后续激光脉冲之前至少0.1µs开始,以便允许跨当前孔径的平滑的温度轮廓或者更精确地说平滑的径向温度梯度。该相对较短的时间段可以适用于激光孔径小并且有源区或者区带靠近作为热沉(submount)的导热结构时的情形。有源区与热沉之间的距离在这种情况下可以处于5µs的范围内,使得局部温度升高将快速减少。此外,细节也取决于热损耗。如果例如损耗已经遵循高斯形状,那么可以很快确立平滑的温度轮廓或者更精确地说平滑的径向温度梯度以及因而确立热透镜。在其他情形下,可能有利的是在后续激光脉冲之前0.5µs、2µs或者甚至10µs开始电流预脉冲。
驱动电路可以进一步适于在电流预脉冲与电流预脉冲被提供给垂直腔表面发射激光器之后发射的激光脉冲之间提供至少10ns、更优选地至少50ns的时间间隙,其中峰值电流小于垂直腔表面发射激光器的激光阈值电流的50%。预脉冲提供的电能在该时间间隙期间减少。甚至可能优选的是不在所述时间间隙内借助于驱动电路将电流提供给VCSEL。该时间间隙可以甚至包括100ns以及更多的时段,其中没有电流提供给VCSEL。特别是在电流预脉冲造成的温度轮廓的大差异的情况下,该时间间隙可能是有利的,以便跨形成热透镜的激光孔径得到平滑的温度轮廓或者更精确地说平滑的径向温度梯度。
电流预脉冲可以包括低于垂直腔表面发射激光器的激光阈值电流的最大电流幅度。在这种情况下,没有激光独立于电流预脉冲的长度发射。
可替换地,如果热透镜已经以最佳的方式形成,那么电流预脉冲可以包括高于垂直腔表面发射激光器的激光阈值电流的最大电流幅度。实验结果表明,有可能在没有VCSEL的任何激光发射的情况下提供短且相对较高的电流脉冲。在特定的情况下,甚至有可能预脉冲类似于激光脉冲,但是由于缺少热调节而不允许任何激光操作。包括高于垂直腔表面发射激光器的激光阈值电流的最大电流幅度的电流预脉冲可以允许在短的时间段内提供大量的能量,并且可以帮助最小化在限定的光学条件下允许激光发射所需的能量。
垂直腔表面发射激光器可以包括至少一个热管理结构。该热管理结构可以适于支持在两个后续激光脉冲之间确立跨垂直腔表面发射激光器的激光孔径的平滑的温度或者更精确地说平滑的径向温度梯度。对于VCSEL、尤其是高功率VCSEL而言,理想的是选择DBR的组成和所有组件材料以及金属接触的几何结构以便最大化热导率。对于利用短脉冲和相对较低的占空比的操作而言,已经证明,可以牺牲对于理想除热的需求以便以必须借助于预电流提供的最小功率创建期望的温度轮廓。在设备设计中,这意味着可以使用三元AlGaAs化合物而不是二元物,更厚的层可能是有利的,并且可以朝着以最小的热量实现限定的温度轮廓以便构建热透镜的目标设计设备几何结构。衬底的厚度可能特别重要,因为在底部发射器的情况下,热透镜在该体积内构建,即一般规则“越薄越好”不成立并且必须基于吸收、脉冲长度和重复率以及激光腔的期望的属性,即热透镜的强度,选择理想的衬底厚度。
可能特别有利的是,不像通常做的那样将VCSEL加工成自由站立和暴露的台面的形状,而是允许从孔径的边沿更好地导热,因为温度轮廓通过激光孔径中心的热沉积以及激光孔径边缘或边沿周围的良好的除热确立。激光孔径边缘处的局部除热可以例如通过“孔蚀刻”或者通过台面侧翼到例如周围的金属层的良好的热接触而增大。尽管可能有利的是使得电接触直径小于孔径,但是它可能帮助具有尺寸与孔径相同或者甚至更大的热接触。这可以例如通过在GaAs表面上形成大的金属接触而实现,所述表面只有中心部分具有良好的电接触。在通常的VCSEL设计中,最后的GaAs层是高度掺杂的,以便允许这样的到金属的良好接触。一种仅在中心具有良好的电导率但是跨大的接触具有良好的热导率的实用措施可以是蚀刻掉(非常薄,即20-80nm的)高度掺杂的GaAs层的外面的部分。
垂直腔表面发射激光器可以是包括光学反馈元件的垂直扩展腔表面发射激光器。光学反馈元件可以例如是平坦的镜或者弯曲的镜。用于将激光聚焦到激光腔的弯曲镜可能具有以下缺点:可能需要关于激光腔的精确对准。
所述激光传感器模块可以包括垂直腔表面发射激光器阵列。驱动电路在这种情况下可以适于向至少所述阵列的垂直腔表面发射激光器的部分提供预电流,其中该预电流可以适应于向其提供预电流的垂直腔表面发射激光器在阵列内的相对位置,使得不同的预电流被提供给阵列的至少第一和第二垂直腔表面发射激光器。预电流可以是偏移电流或者电流预脉冲。如下文中所讨论的,关于置于阵列的边缘或边沿处的VCSEL以及置于阵列内的VCSEL,不同的预电流可能特别有帮助。
可替换地,激光传感器可以包括垂直腔表面发射激光器阵列,其中驱动电路适于向至少该阵列的垂直腔表面发射激光器的部分提供电流预脉冲,并且其中电流预脉冲适于使得受驱动电路控制以便同时发射激光脉冲的垂直腔表面发射激光器在预定义时间段内开始激光发射,该预定义时间段与被控制以便同时发射激光脉冲的相邻垂直腔表面发射激光器之间的热串扰有关。
阵列设计相对于发射激光的条件可能具有重要的影响。阵列中的最近相邻VCSEL或者VECSEL的紧密靠近降低了温度轮廓中的梯度的构建。在VCSEL或者VECSEL阵列作为用于三维环境中的飞行时间测量(LIDAR)的一个单一光源的应用中,可能特别关键的是一些VCSEL或者VECSEL开始比其他VCSEL或者VECSEL更早地发射激光,因为它们的热透镜受较大的温度轮廓(例如在阵列的边缘处)支持。可能有利的是,将具有一定持续时间的电流预脉冲调适为正好足够长以便确立跨孔径的平滑的温度轮廓或者更精确地说平滑的径向温度梯度,但是足够短(并且在时间上不分开太多)以便最小化尤其是邻近台面之间的热串扰。这种“裁剪”只能通过电流预脉冲实现,因为任何偏移电流或者来自历史的剩余热量将导致在阵列的边缘处有利于热透镜的长时间扩散平衡。
依照另一方面,提供了一种改进的距离检测设备。该距离检测设备包括如上所述的至少一个激光传感器模块以及至少一个光检测器。光检测器适于接收至少一个激光脉冲的反射的激光。距离检测设备进一步包括评估器。该评估器适于识别相应激光脉冲的反射的激光,并且该评估器进一步适于确定反射的激光的接收时间与相应激光脉冲的发射时间之间的飞行时间。
距离检测设备可以进一步包括适于将激光脉冲定向到预期目标区域的光学构件,如例如透镜、镜或者一个或多个扫描单元(例如MEMS镜阵列)等等。激光传感器模块可以包括单个VCSEL或者VECSEL、发射例如一扇激光脉冲的线性阵列或者二维阵列。
依照另一方面,提供了一种改进的驱动激光传感器模块的方法,该激光传感器模块用于飞行时间测量,包括至少一个垂直腔表面发射激光器。该方法包括步骤:
- 向垂直腔表面发射激光器提供电能,使得垂直腔表面发射激光器发射与连续激光发射相比具有小于100ns的脉冲长度和小于5%的重复率的激光脉冲;
- 借助于预电流向垂直腔表面发射激光器提供附加能量,使得至少激光脉冲的部分在限定的光学条件下发射;
- 调适预电流,使得平滑的温度轮廓跨垂直腔表面发射激光器的激光孔径确立,使得热透镜在激光孔径处形成,使得所述激光脉冲的部分内发射的激光通过由驱动电路提供的电流形状表征,从而借助于所述激光脉冲的部分允许到物体的距离的飞行时间测量。
该方法可以进一步包括附加步骤:
- 确定激光脉冲发射期间在垂直腔表面发射激光器中生成的第一热能;
- 确定要提供的附加能量;
- 基于确定的附加能量确定预电流的脉冲形状。
所述附加能量是在根据第一热能和重复率在预电流之后发射的激光脉冲的发射时间允许限定的光学条件所需的热能。该附加能量可以进一步基于周围条件确定,所述周围条件比如周围温度、适于冷却对应的VCSEL的散热器的散热器温度或者可能相关的附加参数,如例如VCSEL或者VECSEL在阵列中的位置。
附加能量以及因而预电流可以用来补偿大范围的散热器温度(即周围温度),这对于汽车中的应用尤其重要。在这种情况下,VCSEL或者VECSEL应当针对较高温度(例如80°C)区域中的操作以最佳的方式设计。用于检测一个或多个温度的手段可以是例如连接到驱动器的热电偶或者通过分析VCSEL或者VECSEL的电气串联电阻。如果周围温度低,那么预电流可以以一定方式调适以便除了允许实现如上所述的平滑的温度轮廓之外,增加VCSEL或者VECSEL组件的总体温度。出于这个目的,必须提供更多的热量且在更长的时间尺度上。更长的时间尺度必须足以允许跨整个VECSEL结构导热,即>>1-10µs。此外,预电流的脉冲形状可以更复杂。总的加热可以例如借助于具有相对较低的电流幅度的偏移电流提供。用于热透镜的热量可以借助于如上所述的相对较短的电流预脉冲提供。
应当理解的是,依照权利要求1-12的激光传感器模块以及权利要求14和15的方法具有具体地如从属权利要求中所限定的相似和/或相同的实施例。
依照另一方面,提供了一种计算机程序产品。该计算机程序产品包括可以保存在依照权利要求1-12中任何一项的激光传感器模块的驱动器电路的至少一个存储设备(RAM等等)上的代码构件,其中该代码构件被布置成使得依照权利要求14或15中任何一项的方法可以借助于驱动电路的像处理器或者微处理器那样的一个或多个处理设备执行。
应当理解的是,本发明的优选实施例也可以是从属权利要求与对应的独立权利要求的任意组合。
下文中限定了另外的有利实施例。
附图说明
本发明的这些和其他方面根据以下描述的实施例将是清楚明白的,并且将参照这些实施例进行阐述。
现在,将通过实例的方式基于参照附图的实施例描述本发明。
在附图中:
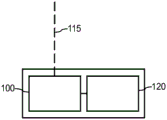
图1示出了激光传感器模块的第一实施例的主示意图,
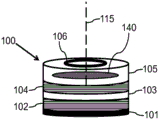
图2示出了VCSEL的层结构的主示意图,
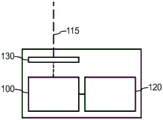
图3示出了激光传感器模块的第二实施例的主示意图,
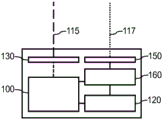
图4示出了距离检测设备的第一实施例的主示意图,
图5示出了脉冲方案的第一实施例的主示意图,
图6示出了脉冲方案的第二实施例的主示意图,
图7示出了脉冲方案的第三实施例的主示意图,
图8示出了距离检测设备的第二实施例的主示意图,
图9示出了驱动激光传感器模块的方法的一个实施例的主示意图。
在这些图中,相同附图标记始终表示相同的对象。这些图中的对象不一定按比例绘制。
具体实施方式
现在,借助于附图描述本发明的各种实施例。
图1示出了激光传感器模块的第一实施例的主示意图。该激光传感器模块包括VCSEL 100和用于电驱动VCSEL 100的驱动电路120。驱动电路120电连接到VCSEL 100以便以限定的方式向VCSEL 100提供电功率。驱动电路120包括用于存储操作驱动电路120的数据和指令的存储设备以及用于执行操作驱动电路120的数据和指令的处理单元。驱动电路120包括用于向外部设备提交和从外部设备接收数据的数据接口。外部设备可以是用于接收关于发射的激光115的信息或者用于驱动VCSEL的控制参数的评估单元。外部设备可以是像热电偶那样的传感器,其提供可以用来调适用于驱动VCSEL的控制参数的关于周围温度的信息。驱动电路120可以进一步适于通过执行例如电阻测量以便确定操作期间VCSEL的温度而确定VCSEL的状态。驱动电路120可以进一步适于测量、接收和分析可能相关的任何信息,以便确定与操作之前或者操作期间VCSEL的状态有关的用于操作VCSEL 100的驱动或脉冲方案。
图2示出了VCSEL 100的层结构的主示意图。发射的激光115经由衬底105发射,该衬底可以是砷化镓(GaAs)衬底。VCSEL 100因此是一种所谓的底部发射器。VCSEL包括第一电极101和与第一电极101机械耦合的第一分布式布拉格反射器(DBR)102。VCSEL进一步包括有源层103,该有源层是一种布置在第一DBR 102与第二DBR 104之间的半导体层布置。第一DBR 102、有源区103和第二DBR限定其中生成激光的VCSEL 100的激光腔。第二DBR 104机械耦合到VCSEL的衬底105。环状第二电极106机械耦合到衬底105的顶侧。也可能代替环状第二电极106提供其中提供了孔的电极层,激光通过该孔发射。在第一电极101与第一DBR102之间,在第一DBR 102与有源区103之间,在有源区103与第二DBR 104之间,在第二DBR104与衬底之间,以及在衬底105与第二电极106之间可能存在未示出的附加层。这样的层可以是一个或多个氧化物孔径,其优选地可以靠近有源区103提供以便约束电流。氧化物孔径可以为例如圆形的,使得氧化物孔径的直径限定VCSEL的激光孔径。从第一电极101到第二电极106的电流的欧姆损耗以及发射的光造成的光学损耗直接加热电流流经其并且激光通过其发射的体积。VCSEL的周围体积借助于散热间接地加热。损耗和散热造成的热量在一定时间之后导致跨激光孔径的平滑的温度轮廓或者更精确地说平滑的径向温度梯度,最大温度在激光孔径的中间或中心并且一定程度上较低的温度在激光孔径的边沿。该温度轮廓导致材料内的折射率的变动,使得热透镜140被构建。VCSEL和VECSEL以及设计选择,包括热透镜概念的背景的基本描述可以见诸通过引用合并于此的“Semiconductor Disk Lasers”(O.Ohkotnikov编,Wiley出版社,2010年)第7章。热透镜140的主要部分位于底部发射VCSEL或者VECSEL (V(E)CSEL)的衬底105中。在顶部发射V(E)CSEL的情况下,热透镜将位于第一DBR 102和中间层内,所述中间层将位于第一DBR 102与第一电极101之间。人们相信,热透镜140对于限定稳定的谐振器以及因而稳定激光模式的选择是必需的,以便允许精确的飞行时间测量。由于温度变化引起的透镜以及因而谐振器的变化使得识别发射的激光115更加困难,该激光由VCSEL发射。在VECSEL的情况下,情况甚至更加糟糕,其中热透镜140影响反馈元件130(参见图3)提供的光学反馈以及因而影响VECSEL开始激光发射的时间。
图3示出了激光传感器模块的第二实施例的主示意图。激光传感器模块包括VCSEL100、可以是具有大约95%的反射率的平面镜的反馈元件130以及用于电驱动VCSEL 100的驱动电路120。VCSEL 100和平面镜构建一种VECSEL,其中激光腔和平面镜构建扩展腔。第二DBR 104的反射率被设计成使得在没有平面镜提供的反馈的情况下不存在激光发射。激光发射所需的平面镜的反射率取决于第二DBR的反射率并且可以在广泛的范围内改变。VECSEL主要用于高功率应用。驱动电路120的功能与关于图1中所示的第一实施例所讨论的相同。
图4示出了距离检测设备的第一实施例的主示意图。距离检测设备包括与关于图3所讨论的第二实施例相似的激光传感器模块。距离检测设备进一步包括光检测器150和评估器160。光检测器150在这个案例中是光电二极管,但是优选地可以是可以用来检测VECSEL发射的激光的任何半导体设备。光检测器应当尽可能对于激光器发射的光子敏感,并且应当具有快速测量时间。一种优选的技术是例如雪崩光电二极管或者甚至更多的所谓的SPAD(单光子雪崩二极管)及其阵列。评估器160包括至少一个像存储芯片那样的存储设备以及至少一个像微处理器那样的处理设备。处理设备适于接收来自驱动电路120以及可选地来自VCSEL 100的数据,以便确定发射的激光115以具有5ns的脉冲长度356(参见例如图5)的激光脉冲345(参见例如图5)的形式离开扩展腔的时间t1。评估器160进一步基于该时间t1和借助于驱动电路120提供的重复率确定光电二极管检测的反射的激光117是否起源于时间t1处发射的激光脉冲。如果反射的激光117起源于所述激光脉冲,记录时间t2,并且借助于飞行时间∆t=t2-t1和激光脉冲的速度c计算到反射该激光脉冲的物体的距离。考虑到光的速度,t1和t2的确定必须非常精确,以便允许精确地计算到物体的距离。触发激光脉冲的电流脉冲之间的延迟、尤其是变化的延迟必须被避免,以便允许精确地确定t1,并且必须良好地限定激光脉冲,以便允许精确地确定t2。在另外的实施例中,可以使用脉冲串,即若干不同长度和或不同关断时间的激光脉冲。
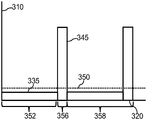
图5示出了脉冲方案的第一实施例的主示意图。该脉冲方案未按比例绘制。该脉冲方案包括具有脉冲长度352的预电流335,使得在两个激光脉冲345之间的整个时间,提供电流幅度低于向其提供预电流335的V(E)CSEL的激光阈值电流350的电流。激光阈值强烈取决于V(E)CSEL的设计。预电流335作为偏移或偏置电流在激光脉冲345之间提供,并且因此必须低于激光阈值以便避免激光发射。激光脉冲345具有20ns的脉冲长度356,并且被提供10µs的周期(100kHz重复频率)。应当提到的是,在图5的讨论中以及在图6和图7的讨论中,同义地使用触发激光脉冲345的电流脉冲以及激光脉冲345。事实上,两者之间存在轻微的差异,其中本发明的一个目的是最小化或者甚至避免这些差异。预电流335适于使得在每个激光脉冲345的开始处形成热透镜140。
预电流的效果可以近似地描述如下。作为空间和时间函数的温度分布遵循热传导微分方程的解。一维解可以写成

其实质上是 的空间高斯分布。常数
的空间高斯分布。常数 称为介质的温度传导率并且等于热导率λ除以比重和热容。对于GaAs,a = 2.4E-5 m²/s。
称为介质的温度传导率并且等于热导率λ除以比重和热容。对于GaAs,a = 2.4E-5 m²/s。
这意味着移动GaAs中的温度分布大约10µm花费1µs。在V(E)CSEL的半径为50µm -100µm并且GaAs衬底的厚度为类似值的情况下,可以推断
- 例如10ns – 100ns的脉冲长度与温度传导相比是短的,即,脉冲期间沉积的热量限定t=0处的温度分布。
- 确立跨激光孔径的直径的最大值在中心的平滑的温度分布需要大约10µs。(严格说来,10µs之后,σ仅仅大约20µm,但是这对于从t=0处的顶帽温度分布得到平滑的分布应当是可以的)。
- 在类似的时间尺度上,在衬底的较近部分中也确立了这样的温度分布。有效的热透镜140与沿着通过所有材料的激光束的积分有关。中心的较高温度相应于中心的较高折射率。
- 随着时间的推移,在衬底的较深处也确立了这样的平滑的温度分布和热透镜140(但是明显地,绝对温度差异或者透镜较弱)。较大的体积可以通过降低的温度差异更多地补偿,并且由于热传导是三维的,因而这些差异将快速地降低(在n维情况下,上面的方程中的平方根由指数n/2代替)。因此,预期热透镜140在1µs - 10µs之后最大并且后来达到平均。
- 由于V(E)CSEL的台面焊接至离有源区103的典型距离为5µm的热沉,热沉的到衬底的热损耗将在从脉冲之后1µs开始显著地降低所有温度(热沉中的热和温度传导率比GaAs中更高)。这再次强调了在数µs之后,热透镜效果通过其最大值。
- 在大约100µs之后,热透镜的效果预期为小。
细节也取决于热损耗以及因此T(x, t=0)。如果例如损耗已经遵循高斯形状,那么热透镜140可以更快地确立,并且最大值在大约1µs处达到。此外,激光孔径的直径50µm -100µm可以更小,使得热透镜可以甚至在100ns或者数百纳秒内确立。
回到关于图5所讨论的脉冲形状,这意味着借助于激光脉冲345提供的热能在后续激光脉冲中对于热透镜140的形成提供主要贡献。在两个连续脉冲之间的时间>1-10µs的情况下,该贡献是不够的,因为热能已经在大的体积上散布,从而需要附加的热能。该附加能量借助于预电流335的偏移电流在激光孔径内局部地提供。
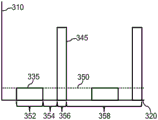
图6示出了脉冲方案的第二实施例的主示意图。该脉冲方案未按比例绘制。该脉冲方案包括作为具有脉冲长度352的电流预脉冲而提供的预电流335,所述脉冲长度比两个激光脉冲345之间的时间更短。在激光脉冲345之后存在一定时段并且在后续激光脉冲之前存在时间间隙354,其中没有电流被提供给V(E)CSEL。电流预脉冲具有向其提供预电流335的V(E)CSEL的激光阈值电流350的95%(在3伏特电压下,1安培电流)的电流幅度。激光脉冲345具有2ns的脉冲长度356,并且被提供20µs的周期(50kHz重复频率)。电流预脉冲的脉冲长度352为3µs并且时间间隙为50ns。借助于电流预脉冲提供的总热能为9µJ,这足以将直径为例如210µm的V(E)CSEL的孤立的台面以及大约150µm的激光孔径加热大约60开尔文。电流预脉冲的长度和定时适应于V(E)CSEL的物理结构以及激光脉冲345的长度和重复率。
激光脉冲的电流幅度的典型范围在1A与30A之间,优选地在3A与20A之间。预电流的电流幅度的典型范围在0.01A与5A之间,优选地在0.1A与2A之间。激光脉冲的电流幅度与预电流的电流幅度之间的比值应当大于2,优选地大于5。激光脉冲345的脉冲长度352在1ns与100ns之间,优选地在2ns与10ns之间。预电流335的脉冲长度356在10ns与10000ns之间,优选地在100ns与5000ns之间。时间间隙355在0ns与1000ns之间。激光脉冲之间的时间段优选地在1µs与20µs之间,更优选地在2µs与10µs之间。对于相对较大直径(>100µm)的VECSEL,创建热透镜所需的热能优选地>1µJ,更优选地>3µJ。
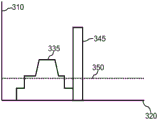
图7示出了提供给VECSEL的脉冲方案的第三实施例的主示意图。预电流335被提供为复杂的电流预脉冲,其中电流幅度很快就高于激光阈值。激光阈值之上的时间段如此短,以至于没有时间确立热透镜140。因此,在该时间段期间避免了VECSEL的激光发射。
图8示出了距离检测设备的第二实施例的主示意图。该距离检测设备的一般配置类似于如关于图4所讨论的距离检测设备的配置。该距离检测设备包括以如上所述的相似方式操作的评估器160和驱动电路120。驱动电路120和评估器160集成到安装结构200中,在该安装结构上布置了V(E)CSEL 100和光检测器150的二维阵列。V(E)CSEL经由镜210和扫描镜220提供发射的激光115。反射的激光经由扫描镜220和镜210借助于光检测器150被接收。扫描镜210为MEMS镜,使得不同V(E)CSEL的发射的激光115都可以发射到不同的区域,以便在可以安装于像汽车那样的交通工具上的距离检测设备的环境中提供关于到物体的距离的3D信息。驱动电路120向V(E)CSEL提供预电流335,其适应于单个V(E)CSEL的相对位置(例如阵列200的中心或边缘)。预电流335或者电流预脉冲进一步适于使得受驱动电路120控制以便同时发射激光345的阵列200的V(E)CSEL在预定义时间段内开始激光发射。该预定义时间段与被控制以便同时发射激光脉冲的相邻V(E)CSEL之间的热串扰有关。将电流预脉冲调适为具有这样的持续时间,其正好足够长以便确立跨激光孔径的平滑的温度梯度,但是足够短(并且在时间上不分开)以便最小化尤其是V(E)CSEL的邻近台面之间的热串扰。
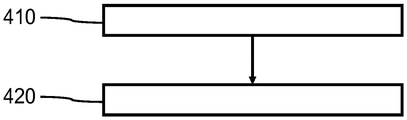
图9示出了驱动激光传感器模块的方法的一个实施例的主示意图。在步骤410中,向垂直腔表面发射激光器提供电能,使得垂直腔表面发射激光器发射与连续激光发射相比具有小于100ns的脉冲长度和小于5%的重复率的激光脉冲。在步骤420中,在至少所述激光脉冲的部分之前至少100ns向垂直腔表面发射激光器提供附加能量,使得所述激光脉冲的部分在限定的光学条件下发射。
本发明的一个目的是借助于V(E)CSEL 100或者V(E)CSEL阵列200允许可靠的飞行时间距离测量。借助于附加能量在激光孔径附近提供热透镜140。该附加能量优选地借助于在优选地每个激光脉冲345之前应用到V(E)CSEL的电流预脉冲335而提供。电流预脉冲优选地被布置成使得没有激光借助于V(E)CSEL发射。在限定的光学条件下,允许V(E)CSEL发射激光脉冲345,使得激光脉冲345的发射时间和脉冲形状是明确限定的。激光脉冲345的明确限定的发射时间和明确限定的脉冲形状允许可靠地检测反射的激光117,其与对应的激光脉冲345的发射相应。
尽管在所述附图和前面的描述中已经详细地图示和描述了本发明,但是这样的图示和描述应当被认为是说明性或示例性的,而不是限制性的。
通过阅读本公开,其他修改对于本领域技术人员将是清楚明白的。这样的修改可以涉及本领域中已知的并且可以代替或者附加于本文已经描述的特征使用的其他特征。
本领域技术人员根据对于所述附图、本公开内容以及所附权利要求书的研究,应当能够理解和实现所公开实施例的变型。在权利要求书中,措词“包括/包含”并没有排除其他的元件或步骤,并且不定冠词“一”并没有排除多个元件或步骤。在相互不同的从属权利要求中记载特定措施纯粹事实并不意味着这些措施的组合不可以加以利用。
权利要求书中的任何附图标记都不应当被视为对其范围的限制。
附图标记列表
100 VCSEL
101 第一电极
102 第一DBR
103 有源区
104 第二DBR
105 衬底
106 第二电极
115 发射的激光
117 反射的激光
120 驱动电路
130 反馈元件
140 热透镜
150 光检测器
160 评估器
200 阵列
210 镜
220 扫描镜
230 安装结构
310 强度
320 时间
335 预电流
345 激光脉冲
350 激光阈值电流
352 电流预脉冲的脉冲长度
354 时间间隙
356 激光脉冲的脉冲长度
358 两个激光脉冲之间的时间段
410 提供激光脉冲
420 提供电流预脉冲
Claims (17)
1.一种用于飞行时间测量的激光传感器模块,包括至少一个垂直腔表面发射激光器(100)以及至少一个驱动电路(120),该驱动电路(120)适于向垂直腔表面发射激光器(100)提供电能,使得垂直腔表面发射激光器(100)发射与连续激光发射相比具有小于100ns的脉冲长度(356)和小于5%的占空比的激光脉冲(345),其中该驱动电路(120)适于在至少所述激光脉冲(345)的部分之前至少100ns向垂直腔表面发射激光器(100)提供附加能量,使得所述激光脉冲(345)的部分在限定的光学条件下发射,其中驱动电路(120)适于向垂直腔表面发射激光器(100)提供预电流(335),其中在所述激光脉冲(345)的部分之前没有激光发射,其中预电流(335)适于使得平滑的温度轮廓跨垂直腔表面发射激光器(100)的激光孔径确立,使得热透镜(140)在激光孔径处形成。
2.依照权利要求1的激光传感器模块,其中垂直腔表面发射激光器(100)被布置成在飞行时间测量期间在稳定模式下操作。
3.依照权利要求2的激光传感器模块,其中垂直腔表面发射激光器(100)被布置成在飞行时间测量期间在基本模式下操作。
4.依照权利要求1的激光传感器模块,其中在所述激光脉冲(345)的部分的发射开始时激光孔径的中心与激光孔径的边沿之间的温度差异为至少2K。
5.依照权利要求1的激光传感器模块,其中在所述激光脉冲(345)的部分的发射开始时激光孔径的中心与激光孔径的边沿之间的温度差异为至少5K。
6.依照权利要求1的激光传感器模块,其中在所述激光脉冲(345)的部分的发射开始时激光孔径的中心与激光孔径的边沿之间的温度差异为至少10K。
7.依照权利要求1的激光传感器模块,其中预电流(335)包括在两个激光脉冲(345)之间提供的恒定偏移电流。
8.依照权利要求1的激光传感器模块,其中预电流(335)包括两个后续激光脉冲(345)之间的至少一个电流预脉冲。
9.依照权利要求8的激光传感器模块,其中驱动电路(120)适于在电流预脉冲与电流预脉冲被提供给垂直腔表面发射激光器(100)之后发射的激光脉冲(345)之间提供至少10ns的时间间隙(354),其中峰值电流小于垂直腔表面发射激光器(100)的激光阈值电流的50%。
10.依照权利要求8的激光传感器模块,其中电流预脉冲包括高于垂直腔表面发射激光器(100)的激光阈值电流的最大电流幅度。
11.依照权利要求4至10中任何一项的激光传感器模块,其中垂直腔表面发射激光器(100)包括至少一个热管理结构,该热管理结构适于在两个后续激光脉冲(345)之间确立跨垂直腔表面发射激光器(100)的激光孔径的平滑的温度轮廓,其中该热管理结构被布置成与激光孔径的中心相比,增大激光孔径的边沿处的除热。
12.依照权利要求1的激光传感器模块,其中垂直腔表面发射激光器(100)为包括光学反馈元件的垂直扩展腔表面发射激光器。
13.依照权利要求1的激光传感器模块,包括垂直腔表面发射激光器(100)的阵列,其中驱动电路(120)适于向至少所述阵列的垂直腔表面发射激光器(100)的部分提供预电流(335),并且其中该预电流(335)适应于向其提供预电流(335)的垂直腔表面发射激光器(100)在阵列内的相对位置,使得不同的预电流(335)被提供给阵列的至少第一和第二垂直腔表面发射激光器(100)。
14.依照权利要求8的激光传感器模块,包括垂直腔表面发射激光器(100)的阵列,其中驱动电路(120)适于向至少该阵列的垂直腔表面发射激光器(100)的部分提供电流预脉冲,并且其中电流预脉冲适于使得受驱动电路(120)控制以便同时发射激光脉冲(345)的垂直腔表面发射激光器(100)在预定义时间段内开始激光发射,该预定义时间段与被控制以便同时发射激光脉冲(345)的相邻垂直腔表面发射激光器(100)之间的热串扰有关。
15.一种距离检测设备,包括至少一个依照权利要求1至14中任何一项的激光传感器模块、至少一个适于接收至少一个激光脉冲(345)的反射的激光的光检测器(150),该距离检测设备进一步包括评估器(160),该评估器(160)适于识别相应激光脉冲(345)的反射的激光,并且该评估器(160)进一步适于确定反射的激光的接收时间与相应激光脉冲(345)的发射时间之间的飞行时间。
16.一种驱动用于飞行时间测量的激光传感器模块的方法,该激光传感器模块包括至少一个垂直腔表面发射激光器(100),该方法包括步骤:
- 向垂直腔表面发射激光器(100)提供电能,使得垂直腔表面发射激光器(100)发射与连续激光发射相比具有小于100ns的脉冲长度(356)和小于5%的重复率的激光脉冲(345);
- 在至少所述激光脉冲(345)的部分之前至少100ns借助于预电流(335)向垂直腔表面发射激光器(100)提供附加能量,其中在所述激光脉冲的部分之前没有激光发射,使得所述激光脉冲(345)的部分在限定的光学条件下发射;
- 调适预电流(335),使得平滑的温度轮廓跨垂直腔表面发射激光器(100)的激光孔径确立,使得热透镜(140)在激光孔径处形成。
17.依照权利要求16的方法,其中所述方法包括附加步骤:
- 确定在激光脉冲(345)的发射期间在垂直腔表面发射激光器(100)中生成的第一热能;
- 确定要提供的附加能量;
- 基于确定的附加能量确定预电流(335)的脉冲形状。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14199083.8 | 2014-12-19 | ||
| EP14199083 | 2014-12-19 | ||
| PCT/EP2015/079396 WO2016096647A1 (en) | 2014-12-19 | 2015-12-11 | Laser sensor module |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107005023A CN107005023A (zh) | 2017-08-01 |
| CN107005023B true CN107005023B (zh) | 2020-03-24 |
Family
ID=52144466
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580069482.9A Active CN107005023B (zh) | 2014-12-19 | 2015-12-11 | 激光传感器模块 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10680411B2 (zh) |
| EP (1) | EP3235078B1 (zh) |
| JP (1) | JP6849593B2 (zh) |
| CN (1) | CN107005023B (zh) |
| BR (1) | BR112017012605A2 (zh) |
| RU (1) | RU2696335C2 (zh) |
| WO (1) | WO2016096647A1 (zh) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3493339B1 (en) | 2017-12-04 | 2022-11-09 | ams AG | Semiconductor device and method for time-of-flight and proximity measurements |
| EP3517998B1 (en) * | 2018-01-24 | 2023-12-06 | Leica Geosystems AG | Airborne lidar pulse rate modulation |
| EP3540879A1 (en) * | 2018-03-15 | 2019-09-18 | Koninklijke Philips N.V. | Vertical cavity surface emitting laser device with integrated tunnel junction |
| WO2019227975A1 (zh) | 2018-05-30 | 2019-12-05 | Oppo广东移动通信有限公司 | 激光投射器的控制系统、终端和激光投射器的控制方法 |
| CN108963750B (zh) * | 2018-07-18 | 2023-08-29 | 度亘激光技术(苏州)有限公司 | 一种vcsel和apd集成芯片及其制备方法 |
| US20230047060A1 (en) * | 2020-02-07 | 2023-02-16 | Ams Sensors Asia Pte. Ltd. | Sensing method and sensor system |
| US11594852B2 (en) | 2020-05-08 | 2023-02-28 | Microsoft Technology Licensing, Llc | Pulse shaping to reduce pulse history effects in pulsed lasers |
| US11630188B1 (en) * | 2021-03-26 | 2023-04-18 | Aeye, Inc. | Hyper temporal lidar with dynamic laser control using safety models |
| US11822016B2 (en) | 2021-03-26 | 2023-11-21 | Aeye, Inc. | Hyper temporal lidar using multiple matched filters to orient a lidar system to a frame of reference |
| US11467263B1 (en) | 2021-03-26 | 2022-10-11 | Aeye, Inc. | Hyper temporal lidar with controllable variable laser seed energy |
| US11474212B1 (en) | 2021-03-26 | 2022-10-18 | Aeye, Inc. | Hyper temporal lidar with dynamic laser control and shot order simulation |
| US11635495B1 (en) | 2021-03-26 | 2023-04-25 | Aeye, Inc. | Hyper temporal lidar with controllable tilt amplitude for a variable amplitude scan mirror |
| US20230044929A1 (en) | 2021-03-26 | 2023-02-09 | Aeye, Inc. | Multi-Lens Lidar Receiver with Multiple Readout Channels |
| US11686845B2 (en) | 2021-03-26 | 2023-06-27 | Aeye, Inc. | Hyper temporal lidar with controllable detection intervals based on regions of interest |
| JP2023116281A (ja) * | 2022-02-09 | 2023-08-22 | 株式会社小糸製作所 | 投光器、及び測定装置 |
| DE102022103899A1 (de) | 2022-02-18 | 2023-08-24 | Schwind Eye-Tech-Solutions Gmbh | Behandlungsvorrichtung für eine Augenbehandlung, Verfahren, Computerprogramm und computerlesbares Medium |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102208907A (zh) * | 2010-03-31 | 2011-10-05 | 索尼公司 | 校正电路、驱动电路、发光器件和电流脉冲波形的校正方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6243407B1 (en) * | 1997-03-21 | 2001-06-05 | Novalux, Inc. | High power laser devices |
| US6751245B1 (en) * | 1999-06-02 | 2004-06-15 | Optical Communication Products, Inc. | Single mode vertical cavity surface emitting laser |
| JP2001315381A (ja) * | 2000-05-11 | 2001-11-13 | Fuji Photo Film Co Ltd | 感光感熱記録材料への画像記録方法、及び画像記録装置 |
| DE10038235A1 (de) * | 2000-08-04 | 2002-02-21 | Osram Opto Semiconductors Gmbh | Oberflächenemittierender Laser mit seitlicher Strominjektion |
| US6636539B2 (en) | 2001-05-25 | 2003-10-21 | Novalux, Inc. | Method and apparatus for controlling thermal variations in an optical device |
| US6834065B2 (en) | 2002-05-21 | 2004-12-21 | Carrier Access Corporation | Methods and apparatuses for direct digital drive of a laser in a passive optical network |
| EP1517415A1 (de) | 2003-09-18 | 2005-03-23 | Leica Geosystems AG | Geodätisches Gerät mit einer Laserquelle |
| JP4432459B2 (ja) | 2003-10-30 | 2010-03-17 | 日亜化学工業株式会社 | 半導体レーザダイオードの駆動方法及び発光装置 |
| JP2008535263A (ja) | 2005-03-30 | 2008-08-28 | ノバラックス,インコーポレイティド | 周波数安定化した垂直拡大キャビティ面発光レーザ |
| JP2007311616A (ja) | 2006-05-19 | 2007-11-29 | Seiko Epson Corp | 面発光レーザおよびその製造方法 |
| EP2074495B1 (en) | 2006-10-03 | 2015-08-05 | Koninklijke Philips N.V. | Laser controller |
| ES2366564T3 (es) | 2008-11-20 | 2011-10-21 | Sick Ag | Sensor optoelectrónico. |
| JP5257053B2 (ja) * | 2008-12-24 | 2013-08-07 | 株式会社豊田中央研究所 | 光走査装置及びレーザレーダ装置 |
| US8995485B2 (en) * | 2009-02-17 | 2015-03-31 | Trilumina Corp. | High brightness pulsed VCSEL sources |
| JP2011216843A (ja) | 2010-03-16 | 2011-10-27 | Ricoh Co Ltd | 半導体レーザ駆動装置、及びこれを含む画像形成装置 |
| JP2012209501A (ja) * | 2011-03-30 | 2012-10-25 | Sony Corp | 補正回路、駆動回路、発光装置、および電流パルス波形の補正方法 |
| US20150288145A1 (en) * | 2012-01-25 | 2015-10-08 | Hewlett-Packard Development Company, L.P. | Vertical-cavity surface-emitting lasers with non-periodic gratings |
| JP5949411B2 (ja) * | 2012-10-04 | 2016-07-06 | ソニー株式会社 | 補正回路、駆動回路、発光装置、および電流パルス波形の補正方法 |
| US9413137B2 (en) | 2013-03-15 | 2016-08-09 | Nlight, Inc. | Pulsed line beam device processing systems using laser diodes |
| US9069080B2 (en) | 2013-05-24 | 2015-06-30 | Advanced Scientific Concepts, Inc. | Automotive auxiliary ladar sensor |
-
2015
- 2015-12-11 US US15/536,905 patent/US10680411B2/en active Active
- 2015-12-11 WO PCT/EP2015/079396 patent/WO2016096647A1/en active Application Filing
- 2015-12-11 EP EP15808581.1A patent/EP3235078B1/en active Active
- 2015-12-11 RU RU2017125504A patent/RU2696335C2/ru not_active IP Right Cessation
- 2015-12-11 CN CN201580069482.9A patent/CN107005023B/zh active Active
- 2015-12-11 JP JP2017532026A patent/JP6849593B2/ja active Active
- 2015-12-11 BR BR112017012605-2A patent/BR112017012605A2/pt not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102208907A (zh) * | 2010-03-31 | 2011-10-05 | 索尼公司 | 校正电路、驱动电路、发光器件和电流脉冲波形的校正方法 |
Non-Patent Citations (2)
| Title |
|---|
| Spatial decoherence of pulsed broad-area vertical-cavity surface-emitting lasers;Michael Peeters et al;《Optics Express》;20051114;第13卷(第23期);第9337-9344页,图5 * |
| Thermally controlled onset of spatially incoherent emission in a broad-area vertical-cavity surface-emitting laser;Gordon Craggs, et al.;《IEEE Journal of Selected Optics in Quantum Electronics》;20090605;第15卷(第3期);第555-562页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| BR112017012605A2 (pt) | 2018-01-16 |
| JP6849593B2 (ja) | 2021-03-24 |
| US20190097393A1 (en) | 2019-03-28 |
| RU2017125504A3 (zh) | 2019-05-22 |
| EP3235078B1 (en) | 2022-02-02 |
| JP2018505548A (ja) | 2018-02-22 |
| EP3235078A1 (en) | 2017-10-25 |
| US10680411B2 (en) | 2020-06-09 |
| RU2017125504A (ru) | 2019-01-21 |
| CN107005023A (zh) | 2017-08-01 |
| RU2696335C2 (ru) | 2019-08-01 |
| WO2016096647A1 (en) | 2016-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107005023B (zh) | 激光传感器模块 | |
| EP3443383B1 (en) | Distance measuring device and method thereof | |
| CN110892596B (zh) | 具有改进的增益开关特性的垂直腔表面发射激光器(vcsel) | |
| JP6340852B2 (ja) | 距離測定装置、移動体及び距離測定方法 | |
| CN111742238A (zh) | 具有滤光器的激光器布置结构 | |
| EP3496216A1 (en) | Segmented vertical cavity surface emitting laser | |
| EP1173907A1 (en) | Semiconductor diode lasers with thermal sensor control of the active region temperature | |
| Slipchenko et al. | High-Power and Repetion Rate Nanosecond Pulse Generation in “Diode Laser—Thyristor” Stacks | |
| EP3176888A1 (en) | Sensor chip | |
| Ammouri et al. | Wavelength‐stabilized ns‐pulsed 2.2 kW diode laser bar with multiple active regions and tunnel junctions | |
| US20220115836A1 (en) | Light-emitting device, optical device, and information processing device | |
| JP2016014577A (ja) | 距離測定装置、移動体及び距離測定方法 | |
| US20210302540A1 (en) | Light-emitting device, optical device, measurement device, and information processing apparatus | |
| Crump et al. | Joule-class 940-nm diode laser bars for millisecond pulse applications | |
| Herper et al. | VECSEL for 3D LiDAR applications | |
| US20240136793A1 (en) | Surface-emitting laser, laser device, detection device, mobile object, and method for driving surface-emitting laser | |
| JP2016518031A (ja) | 垂直外部共振器面発光レーザーのための導光 | |
| US20240085534A1 (en) | Light emitting device, ranging device and movable object | |
| EP4358326A1 (en) | Surface-emitting laser, laser device, detection device, mobile object, and method for driving surface-emitting laser | |
| US10535976B1 (en) | Optical device and system having thermal buffers | |
| Grabherr et al. | New markets for VCSELS: pulsed operation of high-power devices | |
| Orifjonov | 3D sensing based on VCSELs and VCSEL arrays | |
| CN117795793A (zh) | 表面发射激光器,激光装置,检测装置,移动体,以及表面发射激光器驱动方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20200624 Address after: Ulm Patentee after: Tongkuai optoelectronic device Co.,Ltd. Address before: Eindhoven, Netherlands Patentee before: KONINKLIJKE PHILIPS N.V. |
|
| TR01 | Transfer of patent right |