CN106164495B - 具有嵌入的电动机的多级涡轮机 - Google Patents
具有嵌入的电动机的多级涡轮机 Download PDFInfo
- Publication number
- CN106164495B CN106164495B CN201580007058.1A CN201580007058A CN106164495B CN 106164495 B CN106164495 B CN 106164495B CN 201580007058 A CN201580007058 A CN 201580007058A CN 106164495 B CN106164495 B CN 106164495B
- Authority
- CN
- China
- Prior art keywords
- motor
- impeller
- turbomachine
- impellers
- stages
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012530 fluid Substances 0.000 claims abstract description 74
- 239000007788 liquid Substances 0.000 claims description 45
- 238000000034 method Methods 0.000 claims description 19
- 230000005291 magnetic effect Effects 0.000 claims description 11
- 238000004891 communication Methods 0.000 claims description 9
- 238000011144 upstream manufacturing Methods 0.000 claims description 9
- 230000007423 decrease Effects 0.000 claims description 7
- 230000003247 decreasing effect Effects 0.000 claims 1
- 239000007789 gas Substances 0.000 description 60
- 238000013461 design Methods 0.000 description 15
- 230000005294 ferromagnetic effect Effects 0.000 description 11
- 238000001816 cooling Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 239000012071 phase Substances 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 238000005096 rolling process Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000004888 barrier function Effects 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 239000003302 ferromagnetic material Substances 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 229930195733 hydrocarbon Natural products 0.000 description 3
- 150000002430 hydrocarbons Chemical class 0.000 description 3
- 238000005461 lubrication Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000003134 recirculating effect Effects 0.000 description 3
- 230000004323 axial length Effects 0.000 description 2
- 239000002826 coolant Substances 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000003750 conditioning effect Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000000110 cooling liquid Substances 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000007791 liquid phase Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
Images




















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D31/00—Pumping liquids and elastic fluids at the same time
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/004—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids by varying driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D1/00—Radial-flow pumps, e.g. centrifugal pumps; Helico-centrifugal pumps
- F04D1/06—Multi-stage pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D13/00—Pumping installations or systems
- F04D13/02—Units comprising pumps and their driving means
- F04D13/06—Units comprising pumps and their driving means the pump being electrically driven
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D15/00—Control, e.g. regulation, of pumps, pumping installations or systems
- F04D15/0066—Control, e.g. regulation, of pumps, pumping installations or systems by changing the speed, e.g. of the driving engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D17/00—Radial-flow pumps, e.g. centrifugal pumps; Helico-centrifugal pumps
- F04D17/08—Centrifugal pumps
- F04D17/10—Centrifugal pumps for compressing or evacuating
- F04D17/12—Multi-stage pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D17/00—Radial-flow pumps, e.g. centrifugal pumps; Helico-centrifugal pumps
- F04D17/08—Centrifugal pumps
- F04D17/10—Centrifugal pumps for compressing or evacuating
- F04D17/12—Multi-stage pumps
- F04D17/122—Multi-stage pumps the individual rotor discs being, one for each stage, on a common shaft and axially spaced, e.g. conventional centrifugal multi- stage compressors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
- F04D19/024—Multi-stage pumps with contrarotating parts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
- F04D19/026—Multi-stage pumps with a plurality of shafts rotating at different speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/06—Units comprising pumps and their driving means the pump being electrically driven
- F04D25/0606—Units comprising pumps and their driving means the pump being electrically driven the electric motor being specially adapted for integration in the pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/06—Units comprising pumps and their driving means the pump being electrically driven
- F04D25/0606—Units comprising pumps and their driving means the pump being electrically driven the electric motor being specially adapted for integration in the pump
- F04D25/066—Linear Motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/02—Surge control
- F04D27/0261—Surge control by varying driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/056—Bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/06—Lubrication
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/18—Rotors
- F04D29/181—Axial flow rotors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/18—Rotors
- F04D29/22—Rotors specially for centrifugal pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/40—Casings; Connections of working fluid
- F04D29/42—Casings; Connections of working fluid for radial or helico-centrifugal pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/40—Casings; Connections of working fluid
- F04D29/52—Casings; Connections of working fluid for axial pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/58—Cooling; Heating; Diminishing heat transfer
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/70—Suction grids; Strainers; Dust separation; Cleaning
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D3/00—Axial-flow pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/02—Parts of sliding-contact bearings
- F16C33/04—Brasses; Bushes; Linings
- F16C33/043—Sliding surface consisting mainly of ceramics, cermets or hard carbon, e.g. diamond like carbon [DLC]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Ceramic Engineering (AREA)
- Physics & Mathematics (AREA)
- Thermal Sciences (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Motor Or Generator Cooling System (AREA)
Abstract
公开了一种多级涡轮机(1),包括具有流体入口(5)和流体出口(7)的壳体(3),以及布置在壳体(3)中的多个级(13A,13B)。流动路径通过顺次地布置的级(13A,13B)从流体入口(5)延伸到流体出口(7)。各个级由旋转的叶轮(17A,17B)和嵌入在壳体(3)中且布置成用于使叶轮(17A,17B)以受控的旋转速度旋转的电动机组成。各个电动机包括布置在叶轮(17A,17B)上且与其一体地旋转的电动机转子(31A,31B),以及固定地布置在壳体(3)中的电动机定子(33A,33B)。成对的顺次地布置的叶轮配置成在相反方向上旋转。
Description
技术领域
本文所公开的主题涉及涡轮机,且更具体地涉及特别适用于泵送混合相,即多相流体-诸如混合的气与油的泵或者压缩机。
背景技术
水下气和油压缩机与泵用于离岸设施来从水下油田提取烃。水下、井下和ESP(电可潜水泵)涡轮机由布置成与涡轮机级同轴的电动机驱动。
由涡轮机处理的流通常包含气态和液体烃的混合物,其具有可变的气体体积分数(GVF)或者液体体积分数(LVF)。典型地,湿气体(即含有一小部分液体的气体)由湿气体压缩机处理。高速离心湿气体压缩机通常不能忍受大于5%的液相体积百分比,即它们需要以GVF>95%来操作。因此,常常需要大尺寸的洗涤器-分离器来从被处理的流去除过量的液体内容。
在涡轮机中处理流体时,混合流的存在造成严重的复杂性。设计成用来以设计GVF值运行的涡轮机的效率在该机器(涡轮机)远离设计GVF而运行时迅速下降。假设40%的设计GVF,当以低于20%或者高于60%运行时,效率可降低10点。
为了解决处理混合的气体/液体流―且尤其是GVF>80%的湿气体―中的困难,已经提出(美国专利No.4,830,584)使用多级泵和压缩机,其具有布置在涡轮机壳体中且由布置在涡轮机壳体外部的两个电动机驱动的多个沿轴向对齐的级。两个同轴的轴交替地驱动多级涡轮机的相反地旋转的叶轮。可在这种涡轮机中所使用的级的数量受到减小该机器的轴向长度的需求的限制。这会限制通过涡轮机可实现的压力升高。然而,用于驱动逆向旋转的叶轮的同轴的轴的布置增大了涡轮机的复杂性。
涡轮机-电动机组件的受限的可允许轴向长度,对于海底应用而言典型地在7米内,也严重限制了可获得的总功率。事实上,4MW以上的电动机可比上述限制所允许的更长,除非使用非常高的旋转速度,而这对于涡轮机的寿命是有害的。
因此存在对于用于处理混合的气体/液体流的更高效的涡轮机的需求,其至少部分地减轻现有技术涡轮机的上述缺点中的一个或更多个。
发明内容
根据一方面,提供了一种多级涡轮机,包括:具有流体入口和流体出口的壳体;布置在壳体中的多个级;通过所述顺次地布置的级从流体入口延伸到流体出口的流动路径。各个级由旋转的叶轮和嵌入在壳体中且布置成用于使叶轮以受控的旋转速度旋转的电动机组成。各个电动机包括布置在叶轮上且与其一体地旋转的电动机转子,和固定地布置在壳体中的电动机定子。成对的顺次地布置的叶轮配置成用于在相反方向上旋转。在相反方向上旋转的成对的叶轮优选布置成直接彼此相邻。直接彼此相邻表示它们之间并没有布置任何固定叶片或者轮叶。离开上游叶轮的流体被直接传送到下游叶轮中。在一些实施例中,涡轮机在顺次地布置的、逆向旋转的叶轮之间完全没有任何固定叶片,从而减小了涡轮机的总体长度。
在一些实施例中,涡轮机的所有叶轮都是逆向旋转的,即各个叶轮相对于相邻的叶轮(一个或多个)沿相反的方向旋转。在其它实施例中,该机器可进一步还包括沿相同方向旋转的顺次地布置的叶轮,固定轮叶或者叶片布置在它们之间。
根据一些实施例,涡轮机包括控制装置,其配置成用于单独地控制各个电动机的运行状态。该控制装置可程序化为使各个嵌入的电动机旋转,且因此使各个叶轮以基于例如涡轮机所处理的流体的气体体积分数可在一叶轮上相比于其它叶轮有所不同的旋转速度旋转。控制装置可由一个或更多个控制单元组成。
应当理解,在特别有利的实施例中,涡轮机仅包括这样的叶轮,其各自设有其自身的独立地受控制的嵌入的电动机。然而,在其它实施例中,两个或者更多个辅助的或者额外的叶轮可由一个相同的电动机控制,或者另外由两个不同的电动机控制,但是以相同的旋转速度共同旋转。本公开因此还包括了这样的涡轮机:其中,独立地速度受控制的叶轮可与关于其旋转速度并不能够独立地控制的其它叶轮组合。
在一些实施例中,嵌入的电动机的控制可为转矩控制或者旋转速度控制。例如,控制单元可程序化为用于作为至少一个与可压缩性相关的参数的函数来控制电动机的速度,例如基于涡轮机所处理的流体的可压缩性,因为可压缩性基于气体体积分数而改变。
在一些实施例中,涡轮机可为无轴的,或者包括中心非旋转轴,其旋转地支承叶轮和嵌入的电动机的相关转子。可使用主动磁推轴承,滚动轴承,轴颈轴承,或者其组合。产品润滑的轴承可为特别有利的。
至少一些级的电动机定子可布置在安装在叶轮上的相应的电动机转子周围,使得电动机定子围绕电动机转子。各个级的电动机转子和叶轮可以由电动机定子而不是由中心轴旋转地支承。在一些实施例中,可提供颠倒的布置,其中定子居中地布置,且转子和相关叶轮围绕定子。
涡轮机可包括多个顺次地布置的轴向叶轮。在一些实施例中,所有的级包括轴向叶轮。在其它实施例中,涡轮机可包括一个或更多个径向或者轴向-径向叶轮,例如布置在设置在包括轴向叶轮的第一机器区段下游的机器区段中。
下文公开了特征和实施例,且在所附的权利要求中进一步阐述了它们,权利要求形成了当前描述的整体部分。以上简要描述阐述了本发明的多个实施例的特征,以便可以更好地理解接下来的详细描述,且以便可以更好地理解对现有技术做出的当前贡献。当然,存在本发明的其它特征,它们将在下文中描述,且其将在所附的权利要求中阐述。在这方面,在详细地阐述本发明的若干实施例之前,要理解的是,本发明的多个实施例在其应用方面并不局限于构造的细节,也并不局限于以下说明中所阐述或者附图中所示的构件的布置。本发明能够有其它实施例,且能够以多种方式来实践和实施。此外,要理解的是,本文中所采用的措词和术语用于描述的目的,且不应当被认为是限制性的。
因而,本领域技术人员将理解,本公开所基于的构思可容易地被用作用于设计用来执行本发明的若干目的的其它结构、方法和/或系统的基础。因此,重要的是,在这样的等效构造不偏离本发明的精神和范围的程度上,可将权利要求视为包括这样的等效构造。
附图说明
本发明的所公开的实施例的更完整的理解及其所伴随的优点中的许多将容易地获得,因为在结合附图考虑时,这些内容通过参照以下详细描述得到更好的理解,其中:
图1显示了根据本公开的一个实施例的涡轮机的轴向截面;
图2显示了图1的放大;
图3显示了根据本公开的另一个实施例的涡轮机的轴向截面;
图4显示了图3的放大;
图5显示了根据本公开的另一个实施例的涡轮机的轴向截面;
图6显示了图5的放大的细节;
图7显示了根据本公开的另一实施例的涡轮机的轴向截面;
图8显示了图7的细节的放大;
图9显示了根据本公开的另一实施例的涡轮机的轴向截面;
图10显示了图9的放大的细节;
图11显示了根据本公开的混合的轴向和径向涡轮机的示例性实施例的轴向截面;
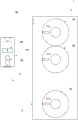
图12显示了本公开的在其下游设有液体/气体分离器的涡轮机的示意图;
图13显示了根据本公开的实施例的涡轮机的供电(electric powering)的示意图;
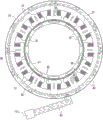
图14显示了根据本公开的实施例的电动机定子的局部正视图;
图15显示了根据本文所公开的主题的一些实施例的嵌入的永磁体电动机的示意性正视图;
图16显示了根据本公开的另外的实施例的嵌入的磁阻电动机的示意性正视图;
图17显示了根据本公开的另一实施例的涡轮机的纵向截面图,其中,用于嵌入的电动机的电子控制装置位于涡轮机的一端处;
图18显示了根据本公开的涡轮机的另一实施例的纵向截面图,其中,入口歧管和出口歧管轴向地对齐;
图19显示了本公开的涡轮机的实施例的放大的细节,其具有用于冷却嵌入的电动机的电动机定子的布置;
图20显示了前截面,其显示了包括支承叶轮的主动磁推轴承的一个实施例;
图21和22显示了针对不同的实施例中的、由涡轮机处理的流体的不同的气体体积分数百分比的顺次地布置的涡轮机级的旋转速度的示图。
具体实施方式
示例性实施例的以下详细描述参照附图。不同的图中的相同的参考标号表示相同的或者类似的元件。此外,图并不一定按比例绘制。此外,以下详细描述并不限制本发明。相反,本发明的范围由所附的权利要求限定。
在整个说明书中对"一个实施例"或者"实施例"或者“一些实施例”的引用表示结合实施例所描述的特定的特征、结构或者特性包括在所公开的主题的至少一个实施例中。因此,在整个说明书中在不同的地方出现短语"在一个实施例中"或者"在实施例中"或者"在一些实施例中"并不一定参照相同的实施例(一个或多个)。此外,特定的特征、结构或者特性可按照任何合适的方式在一个或更多个实施例中组合。
图1和2显示了根据本公开的涡轮机的实施例。涡轮机整体标号为1,并且包括设有入口歧管5和出口歧管7的外壳体3。
涡轮机可为竖直地分开的或者水平地分开的类型。在图1中所示的实施例中,涡轮机是竖直地分开的类型,其中壳体3由中心筒3A和两个端部部分3B,3C组成,它们密封地彼此连接以形成壳体3。
涡轮机1可为湿气体压缩机或者多相泵,且更一般地为适用于增大多相流体(例如包含一定百分比的可压缩气体的液体,或包含一定百分比的液体的气体)的压力的涡轮机。图1和2更具体地显示了多相泵,适用于处理包含一定百分比的气态介质的液体流。
在一些实施例中,如图1和2中所示,涡轮机1是大体轴向的机器。涡轮机1可由与入口歧管5流体连通的入口室9和与出口歧管7流体连通的出口室11组成。过程流体沿大体轴向方向从入口室9朝向出口室11经过多个级13A,13B而流过涡轮机。
在优选实施例中,涡轮机1包括成对地布置的偶数个级,各对都包括在流的方向上顺次地布置的第一级13A和第二级13B。如下文中将更详细地描述的,各个级包括由相应的嵌入的电动机驱动而旋转的旋转的叶轮。有利地,各对的两个顺次地布置的级的叶轮是逆向旋转的,即它们被配置为且受控制而在两个相反方向上旋转,一个沿着顺时针方向,而另一个沿着逆时针方向。在各对级中,第一,即最上游的叶轮在一个相同的方向上旋转,而第二,即最下游叶轮在另一个方向上旋转,使得在一个方向上旋转的各个叶轮后面总是跟着在相反方向上旋转的下一个叶轮。
如继续参照图1在图2中最佳地显示的,各个级13A,13B包括叶轮15A,15B。叶轮15A,15B设有相应的叶轮叶片17A,17B。各个叶轮叶片17A,17B可设有根部部分,翼型件部分和末梢部分。各个叶轮的环形地布置的叶片17A,17B的末梢部分形成外部环或者围带19A,19B。在一些实施例中,环或者围带19A,19B可由单件的构件形成。类似地,各个叶轮的叶片17A,17B的根部21A,21B可形成单件的环。
在一些实施例中,各个叶轮15A,15B借助于相应的轴承装置23A,25A和23B,25B支承在内部轴27上。轴27可固定地安装在壳体3中。如图2中示意性地显示的,轴承装置23A,25A和23B,25B可具有组合的径向承载和轴向承载能力,即它们可支承轴向负载和径向负载两者。根据一些实施例,轴承装置23A,25A,23B,25B可由涡轮机1处理的流体的液体部分来润滑和冷却。
各个叶轮15A,15B可独立于其它叶轮在轴27上旋转,使得顺次地布置的叶轮可在相反方向上且以不同的角速度旋转。
各个级13A,13B由相应的嵌入的电动机来驱动而旋转。根据本文所公开的技术的实施例,可使用永磁体电动机(简称为PM电动机)。也可使用开关或者同步磁阻电动机或者可变磁阻电动机。
各个电动机由与相应的叶轮15A,15B一体地旋转的电动机转子31A,31B和相对于涡轮机1的壳体3固定的电动机定子33A,33B组成。如图1和2所示,各个嵌入的电动机的电动机转子31A,31B和电动机定子33A,33B径向地布置,一个围绕另一个。在图1和2的实施例中,电动机定子布置在电动机转子外部,即电动机定子33A,33B围绕相应的电动机转子31A,31B。如稍后将描述的,也可预见颠倒的布置,其中电动机转子围绕相应的电动机定子。
在一些实施例中,电动机转子31A,31B可容纳在相应的叶轮15A,15B的围带19A,19B中,或者部分地由相应的叶轮15A,15B的围带19A,19B形成,且可由永磁体32A,32B组成。各个电动机定子33A,33B包括多个由相应的铁磁芯或者轭35A,35B以及缠绕在其周围的电气线圈37A,37B形成的电磁体。根据一些实施例,如在图14和15中最佳地看到的,电动机定子33A,33B的各个轭35A,35B可包括两个径向地延伸的臂36,在其周围缠绕了电气线圈37A,37B。在图1和2的实施例中,臂36径向向内地定向,且其可设有相应的扩张部36X(图14,15)的端部面向相应的电动机转子31A,31B。轭可由铁磁材料-例如堆叠的铁磁金属片制成。轭形成用于电动机定子的模块化结构。
有利地,电动机定子33A,33B可与壳体的内部容积隔离,叶轮15A,15B和电动机转子31A,31B布置在壳体的内部容积中。例如,单个不透液体的环形壳39可形成于外壳体3和内部护套41之间,电动机定子33A,33B容纳在该壳39中。在其它实施例中,各个级13A,13B的电动机定子33A,33B可不透液体地容纳在单独的壳中。在另外的其它实施例中,可提供多个不透液体的壳,其各自容纳顺次地布置的级13A,13B的两个或者更多个电动机定子33A,33B。
稍后将结合一些示例性实施例更详细地描述涡轮机和相关的嵌入的电动机的另外的更多的构件和元件。
图3显示了根据本公开的另外的示例性实施例的涡轮机1的、根据包含涡轮机叶轮的旋转轴线A-A的平面的截面。图4显示了根据图3的实施例的涡轮机1的一个级的放大。如图1和2所示的相同的或者对应的构件或者元件以相同的参考标号来标记。
根据图3和4,涡轮机1也包括由三个部件3A,3B和3C构成的壳体3。壳体3设有入口歧管5和出口歧管7,且设有入口室9和出口室11。多个级13A,13B从入口室9到出口室11顺次地布置在壳体3中。各个级13A,13B包括具有叶片17A,17B的相应的叶轮15A,15B。中心的固定轴27可位于壳体3中,且延伸穿过级13A,13B。各个级13A,13B包括嵌入的电动机,其由固定地布置在壳体3中的电动机定子33A,33B和与相应的叶轮15A,15B一体地旋转且由相应的叶轮15A,15B支承的电动机转子31A,31B组成。
根据图3和4,各个叶轮15A,15B可在其外周边处通过轴承装置51A,53A,51B,53B由相应的电动机定子33A,33B支承。轴承装置51A,53A,51B,53B可位于各个叶轮15A,15B的外围带19A,19B和电动机定子33A,33B的内部之间。为了为轴承提供座,各个电动机定子33A,33B可设有其自身的壳42,其可由护套或者包壳44封闭。用于轴承装置51A,53A;51B,53B的外部环或者座圈的座可形成于护套44的面向内部的表面中。在一些实施例中,轴承装置51A,53A,51B,53B可通过涡轮机1处理的相同的流体来冷却。
图5和6显示了根据本公开的涡轮机的另一实施例。如图1和2中,相同的参考标号指示相同的或对应的部件或者元件。图5和6与图1和2的不同之处在于用于支承各个叶轮15A,15B的轴承。如图6的放大中最佳地显示的,各个叶轮15A,15B由滚动轴承55A,56A,55B,56B支承。在图5和6中所示的示例性实施例中,使用两个相对的单排角接触球轴承来提供组合的轴向和径向承载能力。其它轴承装置是可行的,例如利用不同的数量的轴承和/或不同的类型或者数量的滚动部件来提供组合的轴向和径向承载能力。可提供机械密封装置57以限制或者防止过程流体朝向轴承泄漏。
图7和8显示了根据本公开的涡轮机的另一个示例性实施例。相同的参考标号用于指示对应于图1到6中所示的那些的构件、部件和元件。在图7和8的实施例中,各个级的电动机转子和电动机定子的布置是颠倒的,电动机定子位于电动机转子内部,且叶轮围绕电动机定子。
更具体而言,图7和8中所示的涡轮机1包括设有入口歧管5和出口歧管7的外壳体3,入口歧管5和出口歧管7可分别与入口室9和出口室11流体连通。在图7和8中所示的示例性实施例中,涡轮机1是竖直地分开的类型,且由一起形成壳体3的中心筒3A和两个端部部分3B,3C组成。在其它未显示的实施例中,涡轮机可为水平地分开的类型。
在图7和8中,涡轮机再次呈现为轴向涡轮机1。过程流体沿大体轴向方向从入口室9朝向出口室11、越过多个级13A,13B而流过涡轮机1。在优选实施例中,涡轮机1包括成对地布置的偶数个级,各对包括第一级13A和第二级13B,其串联地布置,且配置成和受控制来在相反方向上旋转。
在一些实施例中,涡轮机1可具有奇数个级,在这种情况下,第一级和最后一级将具有在相同的方向上旋转的叶轮。然而,优选地,涡轮机1包括偶数个叶轮。
如继续参照图7在图8中最佳地看出,各个级13A,13B包括叶轮15A,15B。叶轮15A,15B设有相应的叶轮叶片17A,17B。各个叶轮叶片17A,17B可由根部部分、在叶片的径向外端处以末梢结束的翼型件部分组成。各个叶轮15A,15B的环形地布置的叶片17A,17B的根部部分形成了内部环22A,22B。在一些实施例中,内部环22A,22B可由单件的构件形成。
各个级13A,13B由相应的嵌入的电动机驱动而旋转。各个电动机由电动机转子31A,31B和固定电动机定子33A,33B组成。电动机转子31A,31B形成于相应的叶轮15A,15B上,且与相应的叶轮15A,15B一体地旋转。不同于之前所述的实施例,在图7和8中所示的涡轮机中,各个嵌入的电动机位于环形叶片装置17A,17B内侧,电动机定子33A,33B位于电动机转子内侧。
在一些实施例中,电动机转子31A,31B可容纳在相应的叶轮15A,15B的内部环22A,22B中,或者部分地由相应的叶轮15A,15B的内部环22A,22B形成,且可由永磁体32A,32B组成。在使用可变磁阻电动机或者开关磁阻电动机而不是永磁体电动机的其它实施例中,各个叶轮的内部环22A,22B可由具有磁通量屏障的铁磁材料形成。
各个电动机定子33A,33B固定地布置在壳体3中、相应的电动机转子内部。电动机定子33A,33B可由中心的固定-即非旋转轴27固定地支承。各个电动机定子33A,33B包括由相应的铁磁芯或者轭35A,35B和缠绕在其周围的电气线圈37A,37B形成的多个电磁体。各个轭可设有一个或更多个沿径向向外延伸的臂,线圈37A,37B缠绕在其周围。
在一些实施例中,各个叶轮15A,15B通过相应的轴承装置24A,26A和24B,26B支承在相应的嵌入的电动机的电动机定子33A,33B上。如图8中示意性地显示的,轴承装置24A,26A和24B,26B可具有组合的径向承载和轴向承载能力,即它们可支承轴向和径向载荷两者。
就速度方向和/或模块而言,各个叶轮15A,15B可以不同于相邻的叶轮的速度的旋转速度绕着旋转轴线A-A旋转。
有利地,电动机定子33A,33B与叶轮15A,15B布置于其中的壳体3的内部间隔开。为了更好地安装轴承装置24A,26A,24B,26B,各个电动机定子33A,33B可围绕在单独的罩子或者护套中,在其外表面上,形成了用于轴承的座。在图8中,护套标记为44A,44B,且由此形成的并且容纳相应的电动机定子33A,33B的内部座标记为42A,42B。各个座优选地是不透液体的,以便防止过程流体泄漏到电动机定子33A,33B的座42A,42B中。
图9和10显示了根据本文所公开的技术的涡轮机的另一实施例。如在上文所述的图中,类似的或者等效的部件和构件以相同的参考标号标记。图9和10的涡轮机1是大体轴向机器,具有带有入口歧管5和出口歧管7的壳体3。涡轮机1可进一步由与入口歧管5流体连通的入口室9和与出口歧管7流体连通的出口室11组成。过程流体在大体轴向方向上从入口室9朝向出口室11、越过顺次地布置的多个级13A,13B流过涡轮机。
各个级13A,13B包括由相应的嵌入的电动机驱动而旋转的旋转的叶轮15A,15B,电动机由与相应的叶轮15A,15B一体地旋转的电动机转子31A,31B和固定地布置在壳体3中的电动机定子33A,33B组成。在图9和10的实施例中,各个级13A,13B的电动机定子33A,33B相对于叶轮15A,15B位于径向外部,且围绕相应的电动机转子31A,31B。
优选地,提供偶数个级13A,13B,且这些级成对,各对的两个顺次地布置的级的叶轮逆向旋转,即它们被配置成和受控制来在两个相反方向-分别为顺时针和逆时针-上旋转。如在之前所述的实施例中,嵌入的电动机以及因此级的速度可独立于彼此而受控制,使得各个级的旋转速度可根据稍后将更详细地描述的控制方法被最优化。
各个叶轮15A,15B设有布置成圆圈或者环形布置的相应的叶轮叶片17A,17B。各个叶轮叶片17A,17B可设有根部部分,翼型件部分和末梢部分。各个叶轮15A,15B的环形地布置的叶片17A,17B的末梢部分形成外部环或者围带19A,19B。在一些实施例中,环或者围带19A,19B可由单件的构件形成。各个级的电动机转子有利地形成于相应的叶轮15A,15B的外围带中,或者由相应的叶轮15A,15B的外围带支承。电动机转子31A,31B可包括永磁体32A,32B,其与形成电动机定子33A,33B的电磁体共同作用。例如,永磁体32A,32B可嵌入在相应的叶轮15A,15B的围带19A,19B的外部环形部分中。
各个叶轮15A,15B的各组叶片的根部部分可形成单件的中心芯体28A,28B。
类似于图3和4中所描绘的实施例,各个叶轮15A,15B可在其外周边处通过轴承装置51A,53A,51B,53B由相应的电动机定子33A,33B支承。轴承装置可具有轴向承载和径向承载能力。
轴承装置51A,53A,51B,53B可位于各个叶轮15A,15B的外围带19A,19B和电动机定子33A,33B的内部之间。各个电动机定子33A,33B可容纳在例如由护套44界定的相应的壳42中,护套44使电动机定子33A,33B与周围环境分开。用于轴承装置51A,53A;51B,53B的外部环或者座圈的座可形成于护套44的面向内部的表面中。在一些实施例中,轴承装置51A,53A,51B,53B可由涡轮机1所处理的相同的流体润滑和冷却。
之前所述的实施例涉及轴向涡轮机。本文所公开的技术的其它实施例可包括径向涡轮机或者混合的轴向和径向涡轮机布置。
图11显示了根据本公开的混合的轴向和径向涡轮机的示例性实施例。如图11中所示,总体地标记为1的混合的轴向和径向涡轮机可由顺次地布置在入口歧管与出口歧管(未显示)之间的第一机器区段1A和第二机器区段1B组成。
在图11中所示的实施例中,第一机器区段1A具有多个轴向级。各个级可结合图1到10中的任一个如上所述地设计。在图11的示例性实施例中,轴向级以与图1和2的涡轮机1的级相同的方式来设计。相同的参考标号用于指示相同的或对应的部件和元件,将不再对其进行描述。在其它实施例中,第一涡轮机区段1A可包括根据图3到10中所示的实施例设计的级。
第二机器区段1B可由多个径向或者混合的级组成。应当理解,在当前的描述和所附的权利要求的上下文中,当参照涡轮机时,术语轴向和径向参照穿过机器的流的方向。如上文结合图1至10所提到的,轴向机器中的级的嵌入的电动机的电动机转子和电动机定子布置是径向地布置的,即一个沿径向布置在另一个的径向内侧。这种情况也在图11的混合的涡轮机的区段1A中出现。相反地,在图11的混合的涡轮机的区段1B中-其中流是径向的,例如离心的-各个离心级的嵌入的电动机在如下意义上轴向地布置:电动机定子(一个或多个)和电动机转子沿着涡轮机的旋转轴线对齐。
在图11的局部视图中,仅显示了机器区段1A中的三个轴向级和机器区段1B中的两个径向级,但本领域技术人员将理解,可在两个机器区段1A和1B中的各个中提供不同数量的级。在两个区段之间,一种可行的实施例包括固定区段,以在进入接下来的级之前调节流方向。固定流调节区段的流变向部件可包括固定叶片,例如图11中的66处所示。
图11中所示的两个径向级标记为61A和61B。固定轴63可延伸通过涡轮机,且支承两个机器区段1A和1B的旋转级。在一些实施例中,机器区段1B的级61A,61B可为相同的或者类似的。各个级包括相应的叶轮65A,65B。根据优选实施例,级叶轮65A,65B在相同的方向上旋转。也可预见具有逆向旋转的叶轮的布置。根据一些实施例,各个级61A,61B的旋转速度可独立于其它级(一个或多个)而受控制,从而各个级可以其自身的速度旋转。
轴63可为单件的。在其它实施例中,轴63可由顺次地布置且基本彼此同轴的两个或者更多个轴部分形成。各个叶轮65A,65B旋转地安装在轴63上。
各个叶轮65A,65B包括限定了从叶轮入口延伸到叶轮出口的流动通道的一组叶片67A,67B。各个级61A,61B可进一步包括相应的返回通道69A,69B,它们从相应的叶轮的出口朝向随后的叶轮的入口延伸。返回通道69A,69B可形成于布置在涡轮机1的壳体3中的固定涡轮导流盘(diaphragm)71中。
各个叶轮65A,65B可以借助于具有轴向承载和径向承载能力的相应的轴承装置68A,70A和68B,70B旋转地支承在固定轴63上。轴承可利用流过涡轮机的过程流体的液体部分润滑和冷却。在其它实施例中,轴承可为设有密封装置的滚动轴承,该密封装置防止过程液体泄漏在轴承内部,如例如结合图5和6所述。
在一些实施例中,机器区段1B的各个级61A,61B可设有容纳在壳体3中的相应的嵌入的电动机。各个嵌入的电动机可为PM电动机或者可变磁阻电动机。在图11中所示的实施例中,嵌入的电动机是PM电动机。
在一些实施例中,各个电动机可包括由相应的叶轮65A,65B支承或者形成于相应的叶轮65A,65B中的电动机转子,其与电动机定子共同作用。在图11中所示的实施例中,各个电动机包括电动机转子,其由沿着相关叶轮61A,61B的两个环形区域布置的永磁体71A,73A和71B,73B组成。在其它实施例中,可提供单独的一组环形地布置的永磁体。优选地,永磁体布置在相关叶轮的出口附近,即叶轮叶片67A,67B的后缘处。
各个电动机定子可包括多个电磁体,其固定地安装在机器壳体中-例如由涡轮导流盘71支承或者集成在涡轮导流盘71中,且与永磁体71A,73A,71B,73B共同作用。电磁体布置成以便面对相应的组的环形地布置的永磁体71A,73A,71B,73B。在图11中所示的实施例中,各个电动机定子包括分别用于两个级61A,61B的两组环形地布置的电磁体,标记为75A,77A和75B,77B。各组电磁体与一组相应的永磁体71A,73A和71B,73B共同作用。
类似于如上所述的轴向级的电动机定子,电动机定子75A,77A,75B,77B的电磁体可包括一组铁磁轭和形成在其周围的相关的导体线圈。
如上文所述,涡轮机的轴承可借助于由涡轮机1所处理的相同的流体的液体部分来润滑和冷却。大体上,流体是多相流体,例如气态和液体烃的混合物。流体的气态部分可用于减小机器级的嵌入的电动机的电动机定子与电动机转子之间的间隙中的摩擦。
因为气体体积分数百分比(本文中也简短地表示为GVF%)可在机器的运行期间变化,可出现这样的情况:其中液体的百分比不足以确保支承嵌入的电动机的转子的轴承装置的合适的润滑和/或冷却。相反,存在这样的运行状态,其可使液体在电动机定子和转子之间的间隙中有非常高的粘性,从而增大摩擦损失。
根据一些实施例,为了优化气体和/或液体的量,以便有最优的电动机间隙中的摩擦减小或者轴承润滑和冷却,气体/液体分离器可布置在涡轮机1的出口处,以用于例如当所处理的流体的GVF%特别低时再循环多相流体的气态部分的一部分的目的,和/或用于当GVF%特别高时再循环液体部分的一部分。
继续参照图1至11,如图12中所示,在一些示例性实施例中,涡轮机1设有布置在涡轮机1的出口歧管7的下游的液体/气体分离器81。液体/气体分离器81配置成用于使气体部分的至少一部分和/或液体部分的一部分与由涡轮机1传送通过传送管道80的主流分开。主流通过主管道83离开分离器81。可在液体/气体分离器81与涡轮机1之间提供第一气体流再循环管道85,与涡轮机的嵌入的电动机流体连通。气体分配通路87可布置和配置成用于从气体流再循环管道85朝向涡轮机1的各个级13A,13B的电动机定子33A,33B与电动机转子31A,31B之间的间隙分配再循环的气体。
气体再循环阀89可沿着气体再循环管道85布置,用于控制从气体/液体分离器81朝向涡轮机1的气体再循环。串联的多个阀(未显示)可沿着机器以不同的压力水平分配流。
可沿着气体再循环管道85另外提供热交换器91,用于冷却再循环气体流。气体再循环阀89,或者任何其它控制装置可用于控制气体再循环,从而如果涡轮机1处理的流体流中的气体体积分数不足以用于电动机的间隙中的合适的摩擦控制,则间隙中的气体的量可通过气体再循环而被增大。
备选地或者组合地,可在气体/液体分离器81与液体分配装置95之间提供液体再循环管道93,以便当所处理的流体具有不足以实现合适的轴承润滑和冷却的液体体积分数(即液体含量)时,使来自气体/液体分离器81的液体的至少一部分朝向机器级13A,13B的轴承再循环。可提供控制阀97,以用于控制再循环液体流。串联地布置的多个阀可沿着机器以不同的压力水平分配流。在一些实施例中,还可沿着液体再循环管道93提供热交换器99,以便在液体被供给到轴承之前冷却该液体。
继续参照图1到12如图13中所示,在一些实施例中,涡轮机1可通过电功率传送装置101被供有动力,电功率传送装置101可在壳体3外部,且与涡轮机1的级13A,13B的嵌入的电动机电气连通。
在图13的示意性表示中,电功率传送装置101可连接到电功率分配网G,例如三相电功率分配网。电功率传送装置101可由示意性地在103处显示的变压器和示意性地在105处显示的整流器组成。电线107可进入涡轮机1的壳体3,且连接到不同的级13A,13B的各个嵌入的电动机。在图13的示意性表示中,对于n-级涡轮机1而言,嵌入的电动机仅仅示意性地表示且标记为M1到Mn。优选地,各个嵌入的电动机M1-Mn-如上文结合图1到11所述,其又包括电动机转子31A,31B和电动机定子33A,33B-可包括在图13的示意中以111.1到111.n示意性地显示的功率控制电路。各个功率控制电路111.1到111.n可为高频功率控制,能够根据合适的控制算法单独地控制各个嵌入的电动机M1–Mn的旋转速度。
图14显示了涡轮机级13A或者13B其中之一的电动机的示意性截面图。继续参照图1至13,如图14中所示,电动机包括电动机定子33-其可表示定子33A,33B中的任一个,和电动机转子31,其可为电动机转子31A,31B中的任一个。电动机转子包括多个永磁体32,其可为如上所述的永磁体32A,32B中的任一个。电动机定子33可由多个模块化轭35组成,它们各自可为轭35A,35B中的任一个,并且可由面向电动机转子31的铁磁臂或者扩张部36组成。各个臂36由对应于线圈37A,37B中的任一个的电气线圈37围绕。配线40布置在定子周围,以便为线圈37提供功率。第i个一般电动机的配线40可连接到图13中所示的相应的功率控制电路111.i。在图14中所示的实例中,配线40具有多个线,各自表示供电系统的相。线圈37电气连接到配线40的相,使得接着布置的线圈连接到不同的相,如本领域技术人员已知的,因此,顺次地为线圈供电,且导致电动机转子31跟随线圈所产生的磁场的旋转而旋转。
根据其它实施例,可为定子的各个轭提供分开的控制电路,而不是单个动力控制单元和多相配线40。图15显示了示例性实施例,其中,各个轭设有其自身的功率控制电路。在图15中,以截面图显示了级13A,13B的电动机其中之一的一部分。图13和14中的相同的参考标号用于指示相同的或对应的部件或者构件。在图15中,来自整流器105的电功率通过电线107被传送到电动机定子33的内部。为了简单,图15中已省略了电动机转子。电动机定子33可由多个模块化构件组成,多个模块化构件各自由具有径向地朝向电动机转子延伸且设有扩张部36X的电磁体臂36的轭35组成。线圈37围绕各个臂36而缠绕。可为线圈37A,37B中的任一个的各个线圈37由嵌入的功率控制电路111供电。各个嵌入的功率控制电路111连接到线107,并且受控制,使得线圈顺次地被供电,从而在电动机转子31上产生转矩。
在图14和15的两个实施例中,显示了冷却通道38,其中,通过冷却介质,优选地冷却液体可被循环,以便从各个嵌入的电动机的电动机定子去除热。
为了正确地同步各个电动机定子的沿周向布置的线圈37,从而在对应的电动机转子上产生转矩,必须知道相应的电动机转子的角位置。这可由传感器-诸如霍尔(Hall)传感器来探测。备选地,一个或更多个线圈37可用于感测转子的角位置。在这种情况下,可省去单独的传感器。关于可如何使用PM电动机中的电动机定子的线圈来提供关于电动机转子的角位置的信息、以便控制定子线圈的供电的另外的细节,例如在EP2369721和同一专利族的其它公布中公开,其内容通过引用结合在此处。上述公布还公开了电动机定子和电动机转子的模块化结构,其可有利地用于本公开的嵌入的电动机的设计中。
如上所述,嵌入的电动机可为可变磁阻电动机,或者开关或同步磁阻电动机而不是PM电动机。具有这种类型的可变磁阻电动机的涡轮机级的示意性表示在图16中以正视图示出。可变磁阻电动机例如在2013年11月22日以GE Avio s.r.l.的名义提交的意大利专利申请TO2013A000952中公开。在图16的示例性实施例中,电动机具有外部电动机定子和内部电动机转子。在其它实施例中,可使用颠倒的布置,其中电动机转子和叶片围绕电动机定子-即便这种布置可能较低效,且一定程度上更加复杂。
在图16中,涡轮机级整体标记为13,且可为涡轮机1的级13A或者13B中的任一个。电动机的转子标记为31。电动机的定子标记为33,且可与上文结合图1至15所述的电动机定子33A,33B基本相同。
电动机定子可由多个环形地布置的铁磁轭或者芯35组成。各个轭可由径向地朝向电动机的轴线A-A定向且面向电动机转子31的两个铁磁扩张部或者臂36组成。类似于之前所述的实例,轭可具有层叠结构,即它们可由多个堆叠的铁磁材料片形成,这些铁磁材料片彼此电绝缘,以便限制铁磁芯中的涡电流,如从现有技术中众所周知的。电气线圈37缠绕在轭的各个径向地定向的扩张部或者臂36上。
根据一些实施例,电动机转子31由多个环形地布置的模块化构件30形成,它们各自可由与电动机定子33的线圈和轭形成的电磁体共同作用的铁磁部分和使铁磁部分彼此分开的磁通量屏障组成。可变磁阻或者开关磁阻电动机中的铁磁部分和布置在其之间的磁通量屏障的布置在本领域中是已知的。这样的布置的实例例如在US7489062和WO2011/154045中公开,其内容通过引用而结合在此处。
可提供密封器件34,以便使电动机转子31的模块化构件与示意性地在15处所示的叶轮隔开。可在电动机定子33的轭中提供冷却通道38。
在图17中以轴向截面图显示了根据本公开的涡轮机的另一实施例。如上文所述的实施例中所示,相同的参考标号指示对应的部件或者元件。将不会再次描述这些部件或者元件。图17中所示的涡轮机1包括具有辅助的隔室3D的壳体3,该隔室3D可例如形成于壳体3的部件3C中。隔室3D可容纳整体以114指示的电子控制系统,以便控制涡轮机1的级13A,13B的嵌入的电动机以及为其供电。可提供一个或更多个线缆通路116,以便配线连接嵌入的电动机和控制系统114。涡轮机1的剩余结构,且尤其是电动机定子、电动机转子和叶轮叶片的布置,以及内部固定轴的和轴承的布置可为如上文结合图1至16中所示的其它实施例所述的。
图18在轴向截面图中显示了根据本公开的涡轮机另外又一个实施例。已经结合之前的实例描述的相同的或对应的构件、部件或者元件用相同的参考标号来指示,且将不会再次描述。在图18的实施例中,壳体3的入口歧管5和出口歧管7同轴,即它们沿着涡轮机叶轮15A,15B的旋转轴线A-A对齐。中心固定轴27的端部可安装在两个轴向地布置的端部支承件62中,端部支承件62可例如借助于径向挡板64而连接到壳体部件3B,3C,限定了用于由涡轮机处理的流体的入口和出口通路。
在一些实施例中,嵌入的电动机,且特别是电动机定子,必须被冷却,例如通过使冷却介质-诸如液体或者气体-循环通过合适地布置的冷却通道,诸如图14,15和16中的截面中所示的通道38。继续参照图2到18,图19在根据纵向轴线的截面―即包含涡轮机的旋转轴线A-A的平面―中显示了根据本公开的涡轮机的一部分,示出了根据一个示例性实施例的冷却通道38的纵向发展。通道38可由纵向地延伸的管38A形成。在一些实施例中,各个管可由多个单独的管区段形成,各个管区段在长度方向上延伸过涡轮机级13A,13B其中之一的相应的电动机定子33A,33B。管38A可延伸通过电动机定子33A,33B的轭35A,35B。在一些实施例中,如图19中所示,各个电动机定子33A,33B可包含在由护套或者包壳44围绕的壳42中。各个电动机定子的管区段延伸通过相关的壳42,且终止于护套或者包壳44的外表面处,使得通过邻接护套或者包壳44而获得了连续的纵向地延伸的冷却系统,如图19中所示。
在一些实施例中,如图20中所示,继续参照图1到19,代替滚动轴承或者轴颈轴承,或者与滚动轴承或者轴颈轴承相组合,涡轮机的叶轮可由主动磁推轴承支承。在显示了使用磁推轴承的示例性实施例的截面图的图20中,与之前的图中所使用的相同的参考标号用于相同的或者等效的构件,没有再对它们进行描述。在图中,显示了具有叶片17的一般的叶轮15,其可为叶轮15A,15B中的任一个。叶轮15与相应的电动机转子31为一体的,且由主动磁推轴承55M支承。主动磁推轴承55M可由轴27固定地支承的内部电磁体55E和与叶轮15一体地旋转的外部永磁体58M组成。
在以上所述的实施例中,轴向叶轮的旋转速度受控制,使得两个顺次地布置的叶轮在相反方向上旋转,且没有固定叶片或者轮叶布置在叶轮之间。这会减小涡轮机的总体轴向尺寸。因此大量的叶轮可布置在相对较小的壳体中,减小了机器的覆盖区域。然而,在一些实施例中,固定叶片的一个或更多个环形布置可提供于两个连续地布置的叶轮之间。在该情况下,两个叶轮布置成紧邻固定叶片,即固定叶片上游和下游的叶轮在相同的方向上旋转。例如如果需要轴27的径向支承,则可预见固定叶片的一个或更多个环形布置。用于轴的中间径向支承通过固定叶片连接到机器壳体,固定叶片形成用于流体的通路的固定导叶。例如在相对较长和/或相对较薄的轴的情况下,中间径向支承可为有用的。
具有嵌入的电动机的多级涡轮机的上述实施例容许独立控制各级叶轮的旋转速度,以便在处理多相流体流时,尤其是在涡轮机以可变的气体体积分数百分比(GVF%)或者液体体积分数百分比(LVF%)-即远离设计GVF%值或者LVF%值-运行时,涡轮机最优地运行。
根据一些实施例,宽泛地讲,顺次地布置的涡轮机级的旋转速度可受控制,使得级的旋转速度在GVF%大于零时从涡轮机的最上游到最下游级减小。这将如下内容考虑在内:随着流体压力增大,体积流率减小,这是由于包含在所处理的流体中的气态部分的压缩。顺次地布置的级的旋转速度的减小保持速度角基本恒定,从而最大化各个级的效率,且因此在其整体上最大化涡轮机的效率。
在涡轮机运行期间的GVF%变化的情况下,由于进入的流体流中的气体含量的变化,流体的总体可压缩性改变。更具体而言,进入的流的总体可压缩性随着GVF%增大而增大。因此,接着布置的级之间的速度差必须适应进入的流体流的变化了的可压缩性。
通常,进入的流体流的GVF%越高,第一涡轮机级与最后涡轮机级之间的速度差越大,因为进入的流体中的更大量的气体增大了流体可压缩性以及因此跨越级的体积流率的变化。使用独立的嵌入的电动机容许使机器运行适于可变的GVF%,且因此即便当涡轮机远离设计GVF%值运行时也最大化涡轮机效率。
图21显示了示意图,其示意了顺次地布置的级的旋转速度可如何在理论上遵从涡轮机入口处的气体体积分数百分比GVF%的变化而受控制。级数记录在水平轴上,相对于越过涡轮机的流方向,1是最上游级,而N是最下游级。旋转速度(以rpm(转每分)表达)记录在竖直轴上。图21中描绘的各个曲线Ci(i=0….n)表示越过顺次地布置的涡轮机级的速度变化。不同的曲线对应于涡轮机入口处的不同的GVF%。根据图21中的箭头fGVF,GVF%从一个曲线Ci到下一个曲线增大。
图21的示图具体地涉及设计成用于处理液体流,即具有入口处的GVF%=0,的涡轮机。因为液体基本是不可压缩的,越过整个涡轮机,体积流率保持恒定,且因此顺次地布置的级就流动截面积而言彼此类似或者相同。例如,图1到19中所示的示例性的涡轮机情况如此。在设计状态下,多个级以相同的旋转速度旋转。因此,在图21中,设计状态运行由曲线C0表示,其平行于水平轴(对于所有级而言相同的rpm)。
如果在入口流中包含气体,即如果机器入口处的GVF%从零增大到正值,则涡轮机将不再以设计状态运行。因为流体现在变成可压缩的了,且其可压缩性随着GVF%增大而增大,涡轮机的运行通过改变多个级的旋转速度而得以修改。宽泛地讲,随着GVF%不断增大,涡轮机的运行状态从曲线C0朝向曲线Cn移动。第一涡轮机级的旋转速度增大,以便将如下事实考虑在内:如果入口流中存在气体,则流体的平均密度不会保持恒定,而是相反,当从第一机器级朝向最后机器级移动时增大,压力不断增大。随着体积率因为密度增大的原因从一个级向下一个级移动而减小,沿着机器连续地顺次的级的速度逐渐减小,如图21中所示。
入口流中的气体部分的体积百分比越大,涡轮机中的第一级的旋转速度越高,如比较图21中的曲线C1-Cn可理解的。此外,流中的更高的气体量要求旋转速度从一级到下一级有更大的变化,即更陡的速度-级数曲线。
更概括地讲,涡轮机可设计成用于处理混合流,即包含不同于零的GVF%的流体流。在该情况下,当机器以具有设定的GVF%的设计状态运行时,各个级的旋转速度将相同。如果入口流中的气体体积量减小(即如果GVF%变得低于设计值),则第一级将被减慢,而中间级的速度将受控制而逐渐从第一级的最小旋转速度增大到最后级的速度。如果气体的量相对于设计值增大,即如果入口流的GVF%增大,则第一级的旋转速度将增大,且接下来的中间级的速度将因此而被修改,即将逐渐下降,直至达到最后级的旋转速度。
图22中概述了该一般情况。曲线C0再次表示当涡轮机在设计状态下运行时多个级的旋转速度的分配:各个级以相同的旋转速度旋转。C1和C2表示其中机器入口处的GVF%低于设计GVF%的状态。曲线C3,C4和C5表示入口流中的气体含量增大的运行状态,即GVF%高于设计GVF%,且从曲线C3增大到曲线C5。
根据一些实施例,可使涡轮机级的旋转速率适应机器入口处的GVF%,检测或者计算混合相入口流的GVF%。
嵌入的电动机的控制可基于针对各个级设定电动机转矩或者电动机速度的能力。根据一些实施例,速度控制通过针对各个级设定速度增益来执行。级增益可通过设定固定的增益并且用固定的增益乘以对各个级而言不同的变量来获得。不同的变量可基于涡轮机入口处的流体可压缩性测量结果来确定。
下文将描述级旋转速度控制算法的实例。
实例A
根据一些实施例,不同的机器级的旋转速度可从如下参数的测量结果开始受控制:吸入侧压力P1;传送侧压力P2,吸入侧温度T1,传送侧温度T2,总质量流率m,各个电动机Wi所吸收的功率,吸入侧处的液体和气体密度。
传递到流体的总功由
(等式1) 给出
给出
其中, 是由电动机传送的总功率,且
是由电动机传送的总功率,且 是效率,其可例如以表格形式存储在涡轮机的控制单元能够访问的存储器中,且能够基于测量的运行参数而获取。
是效率,其可例如以表格形式存储在涡轮机的控制单元能够访问的存储器中,且能够基于测量的运行参数而获取。
传递到流体的总功 还通过分别传递到液体部分的功和传递到流体的气体部分的功之和给出,其表示如下:
还通过分别传递到液体部分的功和传递到流体的气体部分的功之和给出,其表示如下:
(等式2)
其中:



使用吸入温度T1和传送温度T2,可写出如下额外的等式,其涉及多相流体的比热:
(等式3)
(等式4)
其中


解等式(1)到(4)的系统,可确定气体质量分数 ,以及多变(polytrophic)指数
,以及多变(polytrophic)指数 。基于
。基于 和P1,可设定P1与P2之间的各个级中的压力增大的最优分配,且以表格形式储存它。假设
和P1,可设定P1与P2之间的各个级中的压力增大的最优分配,且以表格形式储存它。假设 和
和 对所有级是恒定的,对单个级应用等式(2),各个级提供的功可计算如下:
对所有级是恒定的,对单个级应用等式(2),各个级提供的功可计算如下:

最后,等式(1)用于计算各个级的功率设定点

根据一些实施例,功率设定点可以不同的方式被用来控制涡轮机。根据一个实施例,可检测各个电动机所施加的转矩,例如基于电动机所吸收的电流的测量结果。基于测得的转矩和计算出的功率设定点( ,确定相应的第i个叶轮的设定点旋转速度(ωi)。在其它实施例中,如果检测到第i级的叶轮的旋转速度(ωi),则基于检测到的旋转速度和设定点处的计算出的功率(
,确定相应的第i个叶轮的设定点旋转速度(ωi)。在其它实施例中,如果检测到第i级的叶轮的旋转速度(ωi),则基于检测到的旋转速度和设定点处的计算出的功率( 来计算设定点转矩。
来计算设定点转矩。
为了去除或者减小从所采用的模型以及从计算中所涉及的参数的测量获得的误差,各个级的校正的旋转速度( 可以如下方式计算:从如上所述计算出的所述级的旋转速度出发,乘以由压力差(P2-P1)上的闭环控制获得的旋转速度
可以如下方式计算:从如上所述计算出的所述级的旋转速度出发,乘以由压力差(P2-P1)上的闭环控制获得的旋转速度 与如上所述获得的级的旋转速度的平均值之间的比率。那么第j级的校正的旋转速度将是:
与如上所述获得的级的旋转速度的平均值之间的比率。那么第j级的校正的旋转速度将是:

实例B
为了简化控制算法以及避免计算气体体积分数的需要,根据第二措施,代替单独地计算各个级的旋转速度,可引入系数ks,且其用于设定各个第i级的旋转速度 如下:
如下:

其中 是平均旋转速度。
是平均旋转速度。
参数ks是基于可测量的参数-诸如T2/T1;P2/P1;流率,平均rpm-根据经验计算出的。在该措施中,平均旋转速度的控制是闭环控制,而各个级的旋转速度的控制是开环控制。
实例C
根据第三示例性实施例,提供了第一控制环,其基于越过涡轮机的压力差控制各个级的旋转速度,以便在GVF变化时保持所述压力差处于设定点或者在设定点附近。可提供第二较慢的控制环,其追踪最小功率吸收。
更详细地,压力差的设定点为ΔPset,且涡轮机的传送和吸入侧之间的测得的压力差为ΔP,则平均旋转速度变化 计算如下:
计算如下:

设定点平均旋转速度则计算为





其中, 是校正因子。可改为计算更复杂的非线性旋转速度分配。
是校正因子。可改为计算更复杂的非线性旋转速度分配。
如果需要, 值可校正如下:
值可校正如下:

以便将执行控制算法的同时发生的GVF变化考虑在内。
用来计算各个级的各个嵌入的电动机的旋转速度的因子 可使用第二慢速控制环来控制,其计算最优
可使用第二慢速控制环来控制,其计算最优 值,该值会最小化嵌入的电动机所吸收的总功率(W)。优化控制环可包括扰动
值,该值会最小化嵌入的电动机所吸收的总功率(W)。优化控制环可包括扰动 以及观察扰动是导致电动机所吸收的总功率增大还是减小的步骤。该算法可如下:
以及观察扰动是导致电动机所吸收的总功率增大还是减小的步骤。该算法可如下:

如果 ,则前进至10
,则前进至10

如果 ,则前进至20
,则前进至20
其中 是嵌入的电动机在时间(t)时所吸收的瞬时总功率。因此
是嵌入的电动机在时间(t)时所吸收的瞬时总功率。因此 的值被修改,以便通过选择顺次地布置的级的旋转速度的最优分配保持总功率最小。
的值被修改,以便通过选择顺次地布置的级的旋转速度的最优分配保持总功率最小。
在上述实施例中,使用单个校正因子 ,且旋转速度分配是线性的。可预见到使用多于一个校正因子以及非线性旋转速度分配的更复杂的算法。
,且旋转速度分配是线性的。可预见到使用多于一个校正因子以及非线性旋转速度分配的更复杂的算法。
实例D
根据第四示例性实施例,控制算法基于通过以恒定负载因子运行多个级来最大化功率开发的构思。
涡轮机受控制,从而保持在传送与吸入之间的设定的压力差。压力差的设定点为 ,传送与吸入侧之间的测得的压力差为
,传送与吸入侧之间的测得的压力差为 ,提供第一控制环,其计算使涡轮机的运行状态再次朝向压力差的设定点移动所需的平均旋转速度
,提供第一控制环,其计算使涡轮机的运行状态再次朝向压力差的设定点移动所需的平均旋转速度 的变化
的变化 。平均旋转速度变化
。平均旋转速度变化 计算如下:
计算如下:

由此,旋转速度的平均设定点值计算如下:





其中, 是第i级的电动机所吸收的功率,即,使得转矩设定点
是第i级的电动机所吸收的功率,即,使得转矩设定点 等于平均转矩。各个第i级的旋转速度变化(
等于平均转矩。各个第i级的旋转速度变化( )则计算如下:
)则计算如下:

其中, 是第i级的转矩。各个第i级的转矩校正计算如下:
是第i级的转矩。各个第i级的转矩校正计算如下:

可例如基于以上示例性的算法的组合或者变化来开发其它控制算法。
大体上,使用具有能够独立于彼此来控制不同的电动机的速度的控制系统的嵌入的电动机,可使用这样的控制方法:其修改电动机的至少一个运行参数,以便将工作流体的可压缩性变化-例如由于GVF%或者LVF%的变化-考虑在内。概括地,涡轮机可受控制,使得嵌入的电动机的以下运行参数中的一个或更多个可被修改来补偿可压缩性变化:旋转速度;转矩;所吸收的功率,或者它们的组合。
虽然已经在附图中显示、且在上文中结合若干示例性实施例特别地且详细地充分描述了本文所描述的主题的公开的实施例,但本领域技术人员将显而易见的是,许多修改、改变和省略都是可行的,而不会在本质上偏离本文中所阐述的新颖的教导、原理以及构思,以及所附的权利要求中所记载的主题的优点。
例如,即便......。因此,所公开的创新的合适的范围应当仅仅通过所附的权利要求的最宽泛的解释来确定,以便包括所有这样的修改、改变以及省略。此外,任何过程或者方法步骤的顺序或者序列可根据备选的实施例改变或者重新排序。
Claims (24)
1.一种多级涡轮机,包括:具有流体入口和流体出口的壳体;和在所述壳体中的多个顺次地布置的级;其中:流动路径通过所述顺次地布置的级从所述流体入口延伸到所述流体出口;各个级由旋转的叶轮和嵌入在所述壳体中且布置成用于使所述叶轮以受控的旋转速度旋转的电动机组成;各个电动机包括布置在所述叶轮上且与其一体地旋转的电动机转子和固定地布置在所述壳体中的电动机定子;成对的顺次地布置的叶轮配置成用于在相反方向上旋转;提供了控制装置,其配置成和布置成使各个叶轮以一个叶轮可相对另一叶轮有所不同的旋转速度来旋转,其中所述级中的至少一些包括串联布置的轴向叶轮,并且所述级中的至少一些包括串联布置的径向叶轮。
2.根据权利要求1所述的涡轮机,其特征在于,在相反方向上旋转的叶轮布置成彼此直接相邻。
3.根据权利要求1或者2所述的涡轮机,其特征在于,所述控制装置配置成用于作为至少一个与可压缩性相关的参数的函数来控制所述电动机的至少一个参数。
4.根据权利要求3所述的涡轮机,其特征在于,所述电动机的所述至少一个参数选自由旋转速度、转矩、功率或者它们的组合组成的组。
5.根据权利要求3所述的涡轮机,其特征在于,所述至少一个与可压缩性相关的参数与所述流体的气体体积分数成比例。
6.根据权利要求1所述的涡轮机,其特征在于,还包括中心非旋转轴。
7.根据权利要求6所述的涡轮机,其特征在于,所述级中的至少一些的叶轮通过相应的轴承旋转地支承在所述中心非旋转轴上。
8.根据权利要求1所述的涡轮机,其特征在于,所述级中的至少一些的叶轮通过相应的轴承支承在相应的电动机定子上。
9.根据权利要求1所述的涡轮机,其特征在于,所述级中的至少一些的电动机定子布置在安装在所述叶轮上的相应的电动机转子周围,所述电动机定子围绕所述电动机转子。
10.根据权利要求9所述的涡轮机,其特征在于,所述电动机定子具有等于或小于相应的叶轮的轴向延伸的轴向延伸。
11.根据权利要求1所述的涡轮机,其特征在于,所述级中的至少一些包括连续地布置的轴向叶轮。
12.根据权利要求1所述的涡轮机,其特征在于,还包括通过由所述涡轮机处理的流体来润滑和冷却的支承轴承。
13.根据权利要求1所述的涡轮机,其特征在于,还包括布置在所述流体出口的下游的液体/气体分离器,且包括液体再循环管道和气体再循环管道至少其中之一;其中,所述液体再循环管道与所述叶轮中的至少一些的液体冷却的支承轴承流体连通,和/或所述气体再循环管道与所述叶轮中的至少一些的电动机定子和电动机转子之间的间隙流体连通。
14.根据权利要求1所述的涡轮机,其特征在于,所述级中的至少一些的电动机转子包括永磁体。
15.根据权利要求14所述的涡轮机,其特征在于,所述叶轮中的至少一些设有叶轮围带,且其中,其永磁体布置在相应的叶轮的围带处。
16.根据权利要求1所述的涡轮机,其特征在于,各个级包括布置在所述壳体中的功率控制电路,以用于控制相关的电动机。
17.根据权利要求1所述的涡轮机,其特征在于,级叶轮的旋转速度受控制,以便伴随越过级的流体密度的增大而从上游向下游减小。
18.根据权利要求1所述的涡轮机,其特征在于,嵌入的电动机包括具有模块化结构的电动机定子,模块化结构由围绕旋转轴线沿周向布置的多个轭组成,各个轭包括围绕相应的磁芯缠绕的至少一个电气线圈。
19.根据权利要求1所述的涡轮机,其特征在于,嵌入的电动机包括具有模块化结构的电动机转子。
20.一种用于增大可变可压缩性流体的压力的方法,所述方法包括如下步骤:
顺次地布置多个叶轮,以便在涡轮机的壳体中旋转,其中至少一些叶轮包括串联布置的轴向叶轮,并且至少一些叶轮包括串联布置的径向叶轮;
为各个叶轮提供电动机,所述电动机嵌入于所述壳体中;
通过所述嵌入的电动机在相反方向上旋转顺次地布置的叶轮;
使流体行进通过叶轮,使流体压力从吸入压力增大至传送压力;
控制嵌入的电动机的至少一个运行参数,使得叶轮以不同的旋转速度旋转。
21.根据权利要求20所述的方法,其特征在于,嵌入的电动机的所述至少一个运行参数作为与流体的可压缩性相关的参数的函数受控制。
22.根据权利要求20所述的方法,其特征在于,包括如下步骤:以从最上游叶轮到最下游叶轮减小的旋转速度旋转嵌入的电动机。
23.根据权利要求21所述的方法,其特征在于,包括如下步骤:以从最上游叶轮到最下游叶轮减小的旋转速度旋转嵌入的电动机,且其中,作为与所述流体的可压缩性相关的参数的函数设定最上游叶轮与最下游叶轮之间的速度差。
24.根据权利要求20-23中的任一项所述的方法,其特征在于,所述运行参数选自由旋转速度、转矩、功率,或者它们的组合组成的组。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITFI20140024 | 2014-02-03 | ||
| ITFI2014A000024 | 2014-02-03 | ||
| PCT/EP2015/052067 WO2015114136A1 (en) | 2014-02-03 | 2015-02-02 | Multistage turbomachine with embedded electric motors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106164495A CN106164495A (zh) | 2016-11-23 |
| CN106164495B true CN106164495B (zh) | 2020-03-13 |
Family
ID=50486967
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580007058.1A Active CN106164495B (zh) | 2014-02-03 | 2015-02-02 | 具有嵌入的电动机的多级涡轮机 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10294949B2 (zh) |
| EP (1) | EP3102833B1 (zh) |
| CN (1) | CN106164495B (zh) |
| BR (1) | BR112016016225B1 (zh) |
| RU (1) | RU2667532C1 (zh) |
| WO (1) | WO2015114136A1 (zh) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NO338067B1 (no) * | 2014-11-10 | 2016-07-25 | Vetco Gray Scandinavia As | Aktivt roterende separator for multifasefluider med elektrisk motor montert koaksialt med en separatortrommel |
| US10801502B2 (en) * | 2015-08-06 | 2020-10-13 | Onesubsea Ip Uk Limited | Fluid processing machines and fluid production systems |
| US10539147B2 (en) * | 2016-01-13 | 2020-01-21 | Wisconsin Alumni Research Foundation | Integrated rotor for an electrical machine and compressor |
| BR112018014883B1 (pt) * | 2016-01-22 | 2022-12-27 | Fmc Technologies, Inc. | Dispositivo modular integrado com bomba de motores/compressor de máximo estágio |
| US10680539B2 (en) * | 2016-02-26 | 2020-06-09 | Mitsubishi Heavy Industries Compressor Corporation | Variable-speed speed increaser |
| WO2018054722A1 (en) * | 2016-09-20 | 2018-03-29 | Vetco Gray Scandinavia As | Improved arrangement for pressurizing of fluid |
| NO347975B1 (en) * | 2016-09-20 | 2024-06-03 | Vetco Gray Scandinavia As | Improved arrangement for pressurizing of fluid |
| US20180087516A1 (en) * | 2016-09-27 | 2018-03-29 | General Electric Company | Turbomachine with active magnetic bearings |
| FR3058481B1 (fr) * | 2016-11-08 | 2020-10-30 | Air Liquide | Compresseur axial comportant des rotors juxtaposes tournant dans des directions inverses |
| CN106762694B (zh) * | 2016-12-12 | 2017-09-15 | 华中科技大学 | 一种微型水力悬浮机械泵 |
| RU2691706C2 (ru) * | 2017-05-22 | 2019-06-17 | Игорь Викторович Лентов | Способ работы многоступенчатых осевых машин |
| NO343873B1 (en) * | 2017-07-21 | 2019-06-24 | Vgs Tech As | Multi-phase fluid separator and use thereof |
| FR3072428B1 (fr) * | 2017-10-16 | 2019-10-11 | L'air Liquide Societe Anonyme Pour L'etude Et L'exploitation Des Procedes Georges Claude | Dispositif et procede de compression et machine de refrigeration |
| FR3072429B1 (fr) * | 2017-10-16 | 2020-06-19 | L'air Liquide Societe Anonyme Pour L'etude Et L'exploitation Des Procedes Georges Claude | Dispositif et procede de compression |
| US11719260B2 (en) | 2017-10-27 | 2023-08-08 | Fmc Technologies, Inc. | Multi-fluid management with inside out fluid systems |
| US10644630B2 (en) | 2017-11-28 | 2020-05-05 | General Electric Company | Turbomachine with an electric machine assembly and method for operation |
| WO2019199318A1 (en) * | 2018-04-13 | 2019-10-17 | Dresser-Rand Company | Centrifugal compressor having an integrated electric motor |
| WO2019199321A1 (en) * | 2018-04-13 | 2019-10-17 | Dresser-Rand Company | Centrifugal compressor with shaftless impeller |
| CN109340143A (zh) * | 2018-10-30 | 2019-02-15 | 江苏贝莱德风机制造有限公司 | 一种四级高压风机 |
| IT201900000637A1 (it) | 2019-01-15 | 2020-07-15 | Nuovo Pignone Tecnologie Srl | Una pompa con un sistema di lubrificazione dei cuscini |
| IT201900000635A1 (it) | 2019-01-15 | 2020-07-15 | Nuovo Pignone Tecnologie Srl | Un componente di cuscino smorzato, cuscino comprendente detto componente, e macchina ruotante comprendente detto cuscino |
| GB201902095D0 (en) | 2019-02-15 | 2019-04-03 | Rolls Royce Plc | Electric turbomachine |
| US20210270275A1 (en) * | 2019-05-10 | 2021-09-02 | Carrier Corporation | Compressor with thrust control |
| EP3686436A1 (en) | 2019-07-31 | 2020-07-29 | Sulzer Management AG | Multistage pump and subsea pumping arrangement |
| WO2021025851A1 (en) * | 2019-08-07 | 2021-02-11 | Carrier Corporation | Axial and downstream compressor assembly |
| CN110685918A (zh) * | 2019-10-17 | 2020-01-14 | 清华大学深圳国际研究生院 | 多相混输泵 |
| US11428171B2 (en) | 2019-12-06 | 2022-08-30 | General Electric Company | Electric machine assistance for multi-spool turbomachine operation and control |
| NO20200774A1 (en) * | 2020-07-02 | 2022-01-03 | Vetco Gray Scandinavia As | Modular Compact Pump |
| CN112081748B (zh) * | 2020-08-25 | 2025-05-27 | 冯军 | 一种磁悬浮多级差速无轴水泵 |
| US20230191289A1 (en) * | 2021-12-21 | 2023-06-22 | Baker Hughes Energy Technology UK Limited | Particulate restriction for fluid pumps |
| GB2617380B (en) * | 2022-04-07 | 2024-06-05 | Baker Hughes Energy Technology UK Ltd | Pump system |
| CN114962272B (zh) * | 2022-06-09 | 2023-04-07 | 烟台龙港泵业股份有限公司 | 一种海上浮动平台分流可调式高压注水泵 |
| US11939920B1 (en) | 2023-02-06 | 2024-03-26 | Rolls-Royce Corporation | Ultra high temperature speed sensor system in a gas turbine engine |
| IT202300004176A1 (it) * | 2023-03-07 | 2024-09-07 | Nuovo Pignone Tecnologie Srl | Una turbomacchina dotata di motori elettrici |
| AT527778A1 (de) * | 2023-11-08 | 2025-05-15 | Circe Biotechnologie Gmbh | Verfahren zum Transportieren eines Fluids, das eine Flüssigkeit und ein Gas enthält |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5017087A (en) * | 1984-07-13 | 1991-05-21 | Sneddon John L | Multi-functional rotary hydraulic machine systems |
| US5187938A (en) * | 1989-05-18 | 1993-02-23 | Spectrospin Ag | Method and a device for precooling the helium tank of a cryostat |
| US6244835B1 (en) * | 1996-06-26 | 2001-06-12 | James F. Antaki | Blood pump having a magnetically suspended rotor |
| CN101535658A (zh) * | 2006-11-08 | 2009-09-16 | 出洋电气株式会社 | 正反转轴流式风机 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CS184298B1 (en) | 1976-01-04 | 1978-08-31 | Gimm V Bufalov | Method of controlling the output of multistep axial compressor and axial compressor for carrying out the method |
| GB8507010D0 (en) | 1985-03-19 | 1985-04-24 | Framo Dev Ltd | Compressor unit |
| RU2235913C2 (ru) * | 2002-10-14 | 2004-09-10 | Открытое акционерное общество "Авиадвигатель" | Многоступенчатый компрессор газотурбинного двигателя |
| US7150600B1 (en) * | 2002-10-31 | 2006-12-19 | Wood Group Esp, Inc. | Downhole turbomachines for handling two-phase flow |
| US7972122B2 (en) * | 2005-04-29 | 2011-07-05 | Heartware, Inc. | Multiple rotor, wide blade, axial flow pump |
| US7489062B2 (en) | 2005-11-14 | 2009-02-10 | General Electric Company | Synchronous reluctance machine with a novel rotor topology |
| US20090067983A1 (en) * | 2007-09-10 | 2009-03-12 | Estlick William R | Centerline compression turbine engine |
| JP2009144569A (ja) * | 2007-12-12 | 2009-07-02 | Nippon Densan Corp | 多重反転軸流ファン |
| EP2081276A1 (en) | 2008-01-21 | 2009-07-22 | Marco Cipriani | Electro-magnetical device with reversible generator-motor operation |
| US8040007B2 (en) | 2008-07-28 | 2011-10-18 | Direct Drive Systems, Inc. | Rotor for electric machine having a sleeve with segmented layers |
| EP2427632B1 (en) * | 2009-05-06 | 2016-12-21 | Curtiss-Wright Electro-Mechanical Corporation | Gas tolerant subsea pump |
| WO2011154045A1 (en) | 2010-06-11 | 2011-12-15 | Abb Research Ltd | Rotor disc for a synchronous reluctance machine |
| EP2824330A1 (en) | 2013-07-12 | 2015-01-14 | Johnson Controls Denmark ApS | An axial compressor and use of an axial compressor |
| US9624920B2 (en) * | 2013-10-14 | 2017-04-18 | Elwha Llc | Peristaltic pump systems and methods |
| US20150104335A1 (en) * | 2013-10-15 | 2015-04-16 | Solar Turbines Incorporated | Internal-driven compressor having a powered compressor rotor |
| US10125584B2 (en) * | 2013-11-14 | 2018-11-13 | Statoil Pertroleum As | Well control system |
-
2015
- 2015-02-02 WO PCT/EP2015/052067 patent/WO2015114136A1/en active Application Filing
- 2015-02-02 US US15/115,722 patent/US10294949B2/en active Active
- 2015-02-02 EP EP15704243.3A patent/EP3102833B1/en active Active
- 2015-02-02 RU RU2016129385A patent/RU2667532C1/ru active
- 2015-02-02 CN CN201580007058.1A patent/CN106164495B/zh active Active
- 2015-02-02 BR BR112016016225-0A patent/BR112016016225B1/pt active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5017087A (en) * | 1984-07-13 | 1991-05-21 | Sneddon John L | Multi-functional rotary hydraulic machine systems |
| US5187938A (en) * | 1989-05-18 | 1993-02-23 | Spectrospin Ag | Method and a device for precooling the helium tank of a cryostat |
| US6244835B1 (en) * | 1996-06-26 | 2001-06-12 | James F. Antaki | Blood pump having a magnetically suspended rotor |
| CN101535658A (zh) * | 2006-11-08 | 2009-09-16 | 出洋电气株式会社 | 正反转轴流式风机 |
Also Published As
| Publication number | Publication date |
|---|---|
| BR112016016225B1 (pt) | 2022-10-11 |
| RU2667532C1 (ru) | 2018-09-21 |
| US10294949B2 (en) | 2019-05-21 |
| CN106164495A (zh) | 2016-11-23 |
| EP3102833A1 (en) | 2016-12-14 |
| BR112016016225A2 (zh) | 2017-08-08 |
| WO2015114136A1 (en) | 2015-08-06 |
| US20170159665A1 (en) | 2017-06-08 |
| BR112016016225A8 (pt) | 2022-07-05 |
| EP3102833B1 (en) | 2021-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106164495B (zh) | 具有嵌入的电动机的多级涡轮机 | |
| CN105684274B (zh) | 具有轴向推力补偿的风扇冷却的电机 | |
| AU2012264741B2 (en) | Subsea compressor directly driven by a permanent magnet motor with stator and rotor submerged in liquid | |
| EP1826887B1 (en) | Methods and apparatus for using an electrical machine to transport fluids through a pipeline | |
| US20150104335A1 (en) | Internal-driven compressor having a powered compressor rotor | |
| US9680351B2 (en) | Electrical machine having cooling features | |
| US20110203271A1 (en) | Electric motor assisted turbocharger | |
| CN102016323B (zh) | 具有电动机和泵的布局结构 | |
| US20070063594A1 (en) | Electric machine with centrifugal impeller | |
| JP6792086B2 (ja) | ターボコンプレッサ、及び、ターボコンプレッサの動作方法 | |
| US20190145428A1 (en) | Compact, modular, integral pump or turbine with coaxial fluid flow | |
| AU2015363802B2 (en) | Centrifugal pressure booster and method for modifying or constructing a centrifugal pressure booster | |
| CN107438704A (zh) | 涡轮膨胀器‑发电机单元以及用于产生电力的方法 | |
| EP3358146B1 (en) | Turbomachine and method of operating a turbomachine | |
| CN103080534A (zh) | 泵涡轮机设备 | |
| CN104520592A (zh) | 离心压缩机叶轮冷却 | |
| EP3911859B1 (en) | A pump with a bearing lubrication system | |
| RU2633609C2 (ru) | Изолированный магнитный узел, способ продувки зазора, роторная машина и установка по переработке нефти и газа | |
| US20230191289A1 (en) | Particulate restriction for fluid pumps | |
| Kashin et al. | Advanced Axial Pumps for Oil Industry | |
| WO2024183953A1 (en) | Turbomachine provided with a switched reluctance motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20220316 Address after: Italy, Florence Patentee after: NUOVO PIGNONE TECNOLOGIE S.R.L. Address before: Italy, Florence Patentee before: NUOVO PIGNONE S.R.L. |
|
| TR01 | Transfer of patent right |