CN103562741A - 利用巡回接收器启用非gps、第二pn&t信号表征本地误差的差分校正系统增强 - Google Patents
利用巡回接收器启用非gps、第二pn&t信号表征本地误差的差分校正系统增强 Download PDFInfo
- Publication number
- CN103562741A CN103562741A CN201280025505.2A CN201280025505A CN103562741A CN 103562741 A CN103562741 A CN 103562741A CN 201280025505 A CN201280025505 A CN 201280025505A CN 103562741 A CN103562741 A CN 103562741A
- Authority
- CN
- China
- Prior art keywords
- rrd
- signal
- receiver
- emissive source
- gps
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/07—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing data for correcting measured positioning data, e.g. DGPS [differential GPS] or ionosphere corrections
- G01S19/073—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing data for correcting measured positioning data, e.g. DGPS [differential GPS] or ionosphere corrections involving a network of fixed stations
- G01S19/074—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing data for correcting measured positioning data, e.g. DGPS [differential GPS] or ionosphere corrections involving a network of fixed stations providing integrity data, e.g. WAAS
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/10—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing dedicated supplementary positioning signals
- G01S19/12—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing dedicated supplementary positioning signals wherein the cooperating elements are telecommunication base stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/40—Correcting position, velocity or attitude
- G01S19/41—Differential correction, e.g. DGPS [differential GPS]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/0072—Transmission between mobile stations, e.g. anti-collision systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/009—Transmission of differential positioning data to mobile
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/021—Calibration, monitoring or correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0236—Assistance data, e.g. base station almanac
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0257—Hybrid positioning
- G01S5/0263—Hybrid positioning by combining or switching between positions derived from two or more separate positioning systems
- G01S5/0264—Hybrid positioning by combining or switching between positions derived from two or more separate positioning systems at least one of the systems being a non-radio wave positioning system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Computer Security & Cryptography (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
本发明涉及用于自保持差分校正网络的系统、方法和装置,其采用巡回参考装置(RRD)作为改善其他启用的本地巡回和/或静态接收装置(RD)的定位、导航和定时(PN&T)方案的参考站。所公开的差分校正系统增强使RRD能够用于非全球定位系统(非GPS)、第二PN&T信号以表征本地误差。这些本地误差之后与信号结合并由本地RD使用,以便计算所述RD的改善的PN&T估算。
Description
技术领域
本公开涉及利用巡回接收器的差分校正系统增强。尤其是,本公开涉及利用巡回接收器启用非全球定位系统(非GPS)、第二定位导航和定时(PN&T)信号以表征本地误差的差分校正系统增强。
发明内容
本公开涉及利用巡回接收器启用非GPS、第二PN&T信号以表征本地误差的差分校正系统增强的方法、系统和装置。尤其是,本公开教导了涉及巡回参考装置(RRD)和接收装置(RD)的系统。对于这种实施例,RRD生成了差分校正信息。所述RRD知道其地理位置。此外,所述RRD包括用于从至少一个发射源接收信号的RRD接收器。而且,所述RRD知道所述发射源的位置。所述RRD进一步包括用于收集所述信号的第一测量值的RRD时钟。进一步地,所述RRD包括用于存储第一测量值的RRD存储器。而且,所述RRD包括RRD处理器,其用于处理第一测量值、所述RRD的位置以及所述发射源的位置,以便生成差分校正信息。此外,所述RRD包括RRD发射器,其发射包括差分校正信息的差分校正信息信号。
所述RD包括RD第一接收器,其接收来自所述发射源的信号。所述RD知道所述发射源的位置。所述RD进一步包括用于收集所述信号的第二测量值的RD时钟。进一步地,所述RD包括用于存储第二测量值的RD存储器。此外,所述RD包括用于从所述RRD接收差分校正信息信号的RD第二接收器。而且,所述RD包括RD处理器,其处理差分校正信息、第二测量值以及所述发射源的位置,以便生成所述RD的位置估算。
在一个或更多实施例中,所述RRD知道其位置,这是因为所述RRD进一步包括用于接收GPS信号的全球定位系统(GPS)接收器,以及用于处理GPS信号以便获得所述RRD的位置的GPS处理器。在至少一个实施例中,所述RRD知道其位置,这是因为所述RRD进一步包括接收来自基站的信号的蜂窝接收器,以及用于处理所述信号以便获得所述RRD的位置的蜂窝处理器。在某些实施例中,所述RRD利用惯性参考系统知道其位置。在一个或更多实施例中,所述RRD利用地图和/或地形数据知道其位置。
在至少一个实施例中,至少一个发射源是卫星,伪卫星,地面发射器,Wi-Fi发射器和/或基站发射器。在一个或更多实施例中,至少一个卫星是低地轨道(LEO)卫星,中地轨道(MEO)卫星和/或同步地球轨道(GEO)卫星。在某些实施例中,至少一个LEO卫星是铱卫星。
在一个或更多实施例中,所述RRD知道发射源的位置,这是因为所述RRD接收器接收来自发射源的指示所述发射源的位置的位置信号,并且所述RRD处理器处理所述位置信号,以便获得所述发射源的位置。在至少一个实施例中,所述RRD是可移动的和/或静止的。在某些实施例中,所述RRD发射器发射无线和/或有线连接的差分校正信息信号。
在某些实施例中,所述RD知道发射源的位置,这是因为所述RD第一接收器接收来自发射源的指示所述发射源的位置的位置信号,并且所述RD处理器处理所述位置信号,以便获得所述发射源的位置。在一个或更多实施例中,所述RRD发射器经由中间装置向RD第二接收器发射差分校正信息信号。
在一个或更多实施例中,用于提供定位的差分校正的系统包括RRD和RD。对于这些实施例,所述RD生成差分校正信息。所述RRD知道其地理位置。所述RRD包括用于从至少一个发射源接收信号的RRD接收器。进一步地,所述RRD包括用于收集所述信号的第一测量值的RRD时钟。而且,所述RRD包括用于发射RRD信号的RRD发射器,所述RRD信号包括第一测量值和所述RRD的位置。
所述RD包括RD第一接收器,其接收来自所述发射源的信号。所述RD知道所述发射源的位置。所述RD进一步包括用于收集所述信号的第二测量值的RD时钟。而且,所述RD包括用于从所述RRD接收RRD信号的RD第二接收器。此外,所述RD包括用于存储第二测量值、第一测量值以及所述RRD位置的RD存储器,此外,所述RD包括RD处理器,其处理所述第二测量值以及所述发射源的位置,以便生成所述RD的位置估算。而且,所述RD处理器被用于处理第一测量值、所述RRD的位置以及所述发射源的位置,以便生成差分校正信息。此外,所述RD处理器被用于处理所述差分校正信息和所述RD的位置估算,以便生成校正后的所述RD的位置估算。
对于这些实施例,所述RRD知道其位置,这是因为所述RRD进一步包括用于接收GPS信号的GPS接收器,以及用于处理GPS信号以便获得所述RRD的位置的GPS处理器。在至少一个实施例中,所述RRD知道其位置,这是因为所述RRD进一步包括接收来自基站的信号的蜂窝接收器,以及用于处理所述信号以便获得所述RRD的位置的蜂窝处理器。在某些实施例中,所述RRD利用惯性参考系统知道其位置。在至少一个实施例中,所述RRD利用地图和/或地形数据知道其位置。
在至少一个实施例中,所述RRD是可移动的和/或静止的。在一个或更多实施例中,所述RRD发射器无线和/或有线连接地发射RRD信号。在某些实施例中,至少一个发射源是卫星,伪卫星,地面发射器,Wi-Fi发射器和/或基站发射器,在一个或更多实施例中,至少一个卫星是LEO卫星,MEO卫星和/或GEO卫星。在一个或更多实施例中,至少一个LEO卫星是铱卫星。
在某些实施例中,所述RD知道发射源的位置,这是因为所述RD第一接收器接收来自发射源的指示所述发射源的位置的位置信号,并且所述RD处理器处理所述位置信号,以便获得所述发射源的位置。在某些实施例中,所述RRD发射器经由中间装置向RD第二接收器发射RRD信号。
在一个或更多实施例中,用于提供定位的差分校正的系统包括RRD、RD以及中间装置。对于这些实施例,所述中间装置生成差分校正信息。所述RRD知道其地理位置。所述RRD包括用于从至少一个发射源接收信号的RRD接收器。进一步地,所述RRD包括用于收集所述信号的第一测量值的RRD时钟。此外,所述RRD包括用于发射RRD信号的RRD发射器,所述RRD信号包括第一测量值和所述RRD的位置。
所述RD包括RD接收器,其用于接收来自所述发射源的信号。所述RD还包括用于收集所述信号的第二测量值的RD时钟。而且,所述RD包括用于发射RD信号的RD发射器,所述RD信号包括第二测量值。
所述中间装置知道所述发射源的位置。所述中间装置包括用于接收来自所述RRD的RRD信号的中间第一接收器,以及用于接收来自所述RD的RD信号的中间第二接收器。所述中间装置还包括中间处理器,其用于处理所述RRD信号的数据、所述RD信号的数据和所述发射源的位置,以便生成所述RD的位置估算并且生成差分校正信息。而且,所述中间处理器被用于处理所述差分校正信息和所述RD的位置估算,以便生成所述RD的校正的位置估算。
在至少一个实施例中,所述发射源是卫星,伪卫星,地面发射器,Wi-Fi发射器和/或基站发射器。在某些实施例中,至少一个卫星是LEO卫星,MEO卫星和GEO卫星。在一个或更多实施例中,至少一个LEO卫星是铱卫星。在某些实施例中,所述RD发射器无线和/或有线连接地发射RD信号。
所述特征、功能和优势可以在本发明的不同实施例中单独实现,或可以在与其他实施例中组合。
附图说明
通过下列说明、所附权利要求以及附图,本公开的这些和其他特征、方面和优势将被更好地理解,其中:
图1示出了所公开的差分校正系统增强的实施例,其利用巡回接收器,并采用LEO卫星作为发射源,其中所述巡回接收器装置(RRD)和接收装置(RD)被用在智能电话中。
图2示出了所公开的差分校正系统增强的实施例,其利用巡回接收器,并采用LEO卫星作为发射源,其中所述RRD处理差分校正信息。
图3示出了所公开的差分校正系统增强的实施例,其利用巡回接收器,并采用LEO卫星作为发射源,其中所述接收装置(RD)处理差分校正信息。
图4示出了所公开的差分校正系统增强的实施例,其利用巡回接收器,并采用LEO卫星作为发射源,其中所述中间装置处理差分校正信息。
图5示出了所公开的差分校正系统增强的实施例,其利用巡回接收器,并采用Wi-Fi节点作为发射源,其中所述RRD处理差分校正信息。
具体实施方式
本文公开的方法和设备提供了利用巡回接收器的差分校正系统增强的可操作系统。具体地,这个系统涉及差分校正系统增强,其利用巡回接收器启用非全球定位系统(非GPS)、第二定位导航和定时(PN&T)信号以表征本地误差。尤其是,本公开根据各个实施例教导了启用自支持差分校正网络的系统、方法和装置,所述自支持差分校正网络可以使用巡回和/或静态收发器作为参考站(例如,巡回参考装置(RRD)),以便改善其他启用的本地巡回接收器(例如,接收器装置(RD))的定位、导航和定时方案。这个公开的差分校正系统增强利用巡回接收器(即,RRD),该巡回接收器启用非GPS、第二PN&T信号以表征本地误差。这些本地误差则由本地接收装置(即,RD)结合信号使用,以便计算改善的PN&T估算。
由各种现有卫星导航系统提供的现有导航和定时信号常常不提供令人满意的系统性能。尤其是,这样的导航和定时信号的信号功率、带宽和几何构造通常不足以满足许多苛刻使用情况的需求。
在许多实例中,基于例如全球定位系统(GPS)信号的现有导航和定时方法通常不能用于导航用户。通常,GPS接收器必须接收至少四个同步测距源,以便允许三维定位和精确的时间传递。不过,GPS信号常常提供不足以容易地穿透城市峡谷或建筑物墙壁的低信号功率或几何形状。基于例如蜂窝电话或电视信号的其他导航方法通常缺乏垂直导航信息。
现有的系统已经尝试通过各种方法的使用,例如内部导航系统、专用信标和高灵敏度的GPS系统,来解决室内导航的缺陷。不过,惯性导航系统偏移并且是昂贵的。信标需要专用的固定资产,其通常是昂贵的并且非标准化的,并且因此仅具有专门的用途。由于GPS信号在室内环境中的衰弱,灵敏的GPS系统往往不按用户期望执行。
差分GPS(DGPS)校正技术增强了使用GPS接收器收集的位置数据的精确度和完整性。GPS接收器依赖定时卫星信号,以便测量卫星到用户的范围,不过,在大气层内,所述信号速度被降低,并且因此影响卫星位置的感知,使得卫星看似离得更远。所述接收器范围测量的误差轮廓线包括多个组分,该组分与在相同地理区域中操作的所有接收器相关(例如,轨道星历表,时钟误差以及大气延迟)。DGPS依赖彼此相对接近的两个GPS接收器的使用,以便它们应当具有类似的大气误差。
在基本DGPS架构内,在已知位置的GPS接收器往往被称为基站或参考站。这种参考站保持静止,并且基于本地导航卫星的传输而计算其自身的位置或卫星范围。所述参考站用其已知的真实位置与这个计算的位置或卫星距离相比较。这种差异可以作为误差校正而实时应用到其他本地巡回GPS接收器,并且由此常常明显改善性能。一般而言,由于巡回GPS接收器仍然需要能够跟踪GPS卫星以施加差分校正,因此DGPS不解决被定位在室内或城市峡谷的位置的GPS接收器的问题。
由于从铱卫星或其他低地轨道(LEO)卫星接收的相对高的信号强度,使用这些卫星进行定位的系统在室内运行良好。这些系统的精确度可以用精确的差分校正改善。
由于通过室内PN&T辅助信号的更高的可存取性可以改善广泛的国防和商业服务和产品,因此这样的系统架构具有以下益处(1)提供在室内和城市峡谷中跟踪导航信号的能力,以及(2)最小化或消除专用参考站的基础设施的需求,所述参考站可以被证明是进入某些方法或应用的障碍。
本公开主要涉及在衰减环境中受益于辅助(即,差分校正)信息的定位系统、导航系统以及定时系统。更为具体地,本公开利用现有的巡回收发器为具有启用的硬件的其他本地用户起参考站的作用。在至少一个实施例中,在大都市的许多智能电话用户可能能够同时接收到GPS信号和额外的非GPS、近地辅助信号。在非衰减环境中,例如在晴朗天空视野的户外的用户,可以为那些可能具有衰退/拥堵的室内信号的室内用户充当参考站。这允许这些室内用户在没有开发、建造、部署和保持所述系统的参考站构造元件的情况下具有他们自己的本地参考站的辅助设施。在至少一个实施例中,能够导航的装置可以被选择为这个架构的一部分或选择在这个架构之外。例如,在设定能够实现导航的新电话时,用户被图形用户界面(GUI)提示他们是否想参与这个辅助计划。一般来说,差分系统的精确度是到参考站的距离的函数,并且因此,使用这些巡回参考站的用户由于他们紧密相邻(即,参考站在1公里(km)内,而不是50公里远)将具有改善的校正。
本公开具有一些新颖之处。一个新颖之处特别地涉及差分校正网络架构,其是相对自保持的。通常,这些架构高度依赖于必须被保持为永久或半永久架构的一部分的参考站。这些参考站通常被勘测,以便高度精确地得知他们的位置,这使得该站能够最佳地估算将影响测距信号的本地误差,以便所述本地误差可以被校正。所公开的系统是自保持的,以代替半永久或永久参考站或基站。所述系统利用在本地区域内的其他用户来开展可以被用于改善和/或允许改善的PN&T方案的差分校正。在差分校正系统中的参考站产生会成为进入某些系统或应用的障碍的前期的沉没成本(sunk cost)。所公开的系统不需要这些,并且因此与此关联的成本(包括与这些加速器关联的长期维护和勘测成本)也趋于零。
本公开的另一个新颖之处是,被差分校正的示例信号是近地信号(例如LEO卫星信号,Wi-Fi信号,蜂窝电话信号以及伪卫星信号),其具有足够的发射功率,以便在使用适当的信号结构时,允许所述信号穿透室内环境。这允许所述差分校正辅助其信号可以穿透室内的基于非GPS信号的PN&T系统。地理定位方法可以被用于改善位置估算以代替勘测的位置,以便辅助所述差分校正的计算。
根据本公开的至少一个实施例,一种系统,其中具有执行精确定位和定时(例如利用GPS)的移动装置可以向不能够执行定位(例如,因为其处于衰减的环境中)的第二装置提供来自至少一个射频(RF)测距源的差分校正,从而改善其完整定位的能力(例如,因为所述差分校正是本地收集的)。
具有多个涉及在所述系统内(例如,在RD、RRD、中间实体或装置或其任意组合中)完成关键处理的实施例。例如,根据本公开的至少一个实施例,能够发射数据的巡回参考装置(RRD)向中间实体发射数据,以用于数据处理。这个中间实体或装置可以通过各种实施方式覆盖,包括但不限于,在有线或无线网络中的服务器、另一个接收装置以及通过基于网页的服务。所公开的系统和方法允许具有最小处理功率的“无声的”接收器,或允许未受训练的用户在不衰退其接收器的性能或不衰退所述装置接收的校正的情况下利用所述系统。
需要注意的是,在一个或更多实施例中,所述RD和RRD在能力方面是相同的。例如,他们均可被认为是“无声的接收器”或能够处理差分校正。在其他实施例中,所述RD和RRD在其能力方面是不相同的。在某些实施例中,RRD具有处理差分校正和将其直接发射到RD的能力。在至少一个实施例中,除了RD还具有允许其处理差分校正并校正其误差的附加功能之外,RD具有与RRD相同的能力。而且,所述RD和RRD可以是能够导航的蜂窝电话,其在不同的时间点经由差分校正彼此支持,并且因此,两个装置具有附加的差分校正和误差校正功能。
根据本公开的至少一个实施例,RRD包括能够执行定位并且能够从近地源(例如LEO信号或地面信号)接收交替或辅助信号的接收器:记录接收的数据的存储器;预处理和/或处理数据的可选的处理器;以及在有线或无线网络中发射信号(例如,RF信号)的发射器。在一个或更多实施例中,RD包括能够从近地源接收交替或辅助信号的第一接收器;记录接收的数据的存储器;预处理和/或处理数据的可选的处理器;以及用于在有线或无线网络中接收信号(例如,RF信号)的第二接收器。在某些实施例中,中间实体包括能够从RRD接收信号(例如,RF信号)并且还可以从RD接收信号(例如,RF信号)的接收器;记录接收的数据的存储器;预处理和/或处理差分校正的可选的处理器;以及在有线或无线网络中发射信号(例如,RF信号)以便向RD提供被处理的数据的发射器。
所公开的方法和装置提供用于自保持的差分校正网络的可操作系统。具体地,这个系统涉及利用至少一个巡回收发器为具有启用的接收装置的其他本地巡回用户充当参考站。与通用的差分校正系统一样,利用具有已知的近似位置的参考站获得校正。代替传统的静态永久或半永久的参考站,这个系统使用至少一个巡回参考收发器,从而利用所接收的GPS测距信号计算该系统的位置。此外,所述收发器能够测量交替的非GPS近地信号。由于这种非GPS近地信号包含与GPS位置估算不一致的误差源,因此这些估算的差异将表征与所述交替信号关联的本地误差。
由于所述信号在衰减或拥堵环境中不可用,因此至少一个本地巡回接收器可能不能使用其信号(GPS)导航。此外,这个接收器可能能够接收其第二的非GPS近地信号,允许其获得具有本地误差的位置估算。这个接收器可以从巡回参考接收器接收数据,以便其能够校正这些本地位置误差并且在其自身的本地GPS运转中断的时候,可以基于其第二信号实现导航。这些校正可以被应用于实时或后处理误差校正。重要的是要注意,虽然在实践中,这个过程可以重复/连续发生,但这个概念被解释为允许所述概念更加容易相互连贯的及时的简短描述。
在一个实施例中,至少一个巡回收发器R1从至少一个RF信号源S1获取至少一个位置测量,以及从至少一个RF信号源S2获取至少一个位置测量。在至少一个实施例中,这些信号中的至少一个可以从至少一个铱卫星发射。在一个或更多实施例中,主PN&T信号是GPS,而第二信号是辅助信号。
在一个或更多实施例中,巡回收发器R1使用来自S1的测距测量计算位置估算。作为本公开的一部分,假设与S1关联的误差已经被合理校正(例如,通过DGPS或通过基于卫星的扩增系统(SBAS))。此外,巡回收发器收集来自S2的测距测量,并将所述测量与所述位置估算比较,以便表征与S2关联的本地误差。
所表征的误差之后可以和R1位置估算一起发射(例如,经由广播)到本地接收器R2,其中由于某些原因,所述本地发射器R2不能可靠使用其主PN&T信号。本地接收器R2基于其第二PN&T信号使用所发射的误差信息来校正其位置估算。
在可替换的实施例中,原始数据,例如来自S1和S2的未处理的测量可以从R1被发射到中间实体,以便完成某些处理,接着经由某些装置,例如数据广播或其他更多直接传输而可由R2获得。
在本公开的另一个实施例中,原始数据,例如来自S1和S2的未处理的测量可以从R1和R2两者(两者均具有发射能力)被发射到中间实体(例如,服务器),其中R2的定位可以被计算并且之后可以由R2获得以便存取。在可替换的实施例中,所述系统可以使用其他信号或测距方法来开发可以包括来自下列中的至少一个的测量值和/或数据的方案:GPS;GLONASS;全球导航卫星系统(GNSS);近地;或从LEO、MEO或可替换的卫星和/或卫星星座的组合发射的其他非GPS信号;以及基于地面的系统,例如惯性测量值,大气压测量值,Wi-Fi信号,超宽带(UWB),Zigbee,RF标签或其他定位信标,例如启用的寻宝(geocache)。
本地接收器R2可以像R1或不像R1那样接收相同的RF信号,但是能够接受与那些信号关联的原始数据或可替换的数据格式。接收器R2可以位于衰减环境(即,室内)中,其中其用于PN&T的主RF信号被阻塞,并且因此该信号不能被获得或者其自身是不可靠的。接收器R2可以利用来自至少一个巡回接收器的PN&T信息来改善其PN&T方案。
与其他类似的架构相比,本公开的优选实施例是有优势的,这是因为其降低了在接收器上的处理需求;根据特定实施例,其中的一者或两者还可以具有发射能力。在这样的装置上的附加处理具有很多缺陷,并且因此,最小化这种需求对于相关的应用是重要的。增加处理需求直接涉及所述装置的成本和所述装置的功率需求,这两者都是这个系统的用户的关键要素。例如,携带移动电话的典型消费者期望所述电话是合理的便携的,并且其便携的能力受所述电话的电源(即,其电池)驱动。明显地,理想的情形是电池在充电之间能够无限地持续下去,但更理想的情形是电话的电池在充电之间的时间被保持在可接受的“不方便”的阈值内,所述阈值取决于用户和用户的给定情况。在这样的情形中,所述装置的初始成本和保持便携性/功率对于激励无线服务提供商的采用以及激励消费者使用在装置级别具有最小处理的架构是关键的。
在优选的实施例架构中,至少一个巡回参考装置R1辅助至少一个第二接收装置R2,所述R2由于某些原因而不能可靠接收其主GPS PN&T信号。在这个实施例中,所述两个装置必须全部能够接收和发射数据。R1不直接接收来自这个过程的好处,除了在将来的时间点从R2或可以为其充当巡回参考装置的其他装置接收可能的类似支持的交换。为了最小化对用户及其装置的负面影响,中间实体被认为是这个示例性实施例的一部分,以便最小化辅助和“接收辅助”收发器两者的功耗。不过,在实践中,中间实体会将系统的复杂性增加到某程度,以致不使用中间装置更受偏爱。
为了适当地表征主要基于大气层的误差,R1和R2需要处于彼此可接受的范围内,并且从而被认为相对于彼此是“本地的”。如果所述校正来自太远的地方,则由于信号穿过大气层的不同部分,因此其是不太准确的,并且因此,产生的校正会是偏斜的(即,空间去相关的测距误差)。R1可以位于未衰减的环境中,例如晴朗天空的户外,其中所述R1可以接收其不能够可靠穿透室内的主PN&T信号。在一个实施例中,所述PN&T信号是GPS信号,并且R1能够跟踪足够的GPS信号,以便得到GPS定位。虽然这个位置估算仍然包括误差,但它将用可接受的精确度代替典型的“勘测”位置。如果接收器能够使用例如广域扩增系统(WAAS)、基于卫星的扩增系统(SBAS)或其他的差分校正(其在某些蜂窝电话中也是可用的,并且如果服务器执行所有的计算,则其也是可用的),则接收器跟踪GPS通常能够计算其大约3米(大约10英尺)的位置。此外,R1可以接收能够穿透室内的第二测距信号,例如非GPS近地测距信号。R1可以接收来自这些信号中的每个的广播数据,并且接着向中间实体发射数据。这些测量可以包括原始测量和/或计算的值,例如来自空间源或地面源中的信号的测距测量值,惯性测量值,大气测量值以及估算的PN&T方案。
R2不能连续接收其主PN&T信号。其可以位于衰减的室内环境中或都市峡谷中,并且其主PN&T信号不能够可靠穿透室内环境,不过,R2在室内仍然可靠接收第二测距信号。R2接收来自这个信号的广播数据,并向R1提供数据的相同的中间实体发射数据。这些测量值可以包括原始测量值和/或计算的值,例如来自空间源或地面源中的信号的测距测量值,惯性测量值,大气压测量值以及估算的PN&T方案。
所述中间实体接受来自R1和R2的数据,并且可以进行预处理,包括用于处理或应用差分校正的原始数据的格式化。所述中间实体进行处理,该处理使用转换的原始数据以计算例如用于R2的差分校正、R1的位置和/或R2的位置。在一种情况下,R2基于从所述中间实体接收的校正而更新其方案,并且现在可以在之前其不能发挥作用的区域中发挥作用。在另一个示例中,R2从所述中间实体接收其预先计算的位置。
在下列描述中,众多的细节被阐述,以便提供所述系统的更彻底描述。不过,所公开的系统可以在没有这些具体细节的情况下被实践,这对于本领域的技术人员来说是显而易见的。在其他实例中,公知的特征并没有被详细描述,以免不必要地模糊本系统。
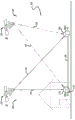
图1示出了所公开的差分校正系统增强105的实施例,其利用巡回接收器并采用LEO卫星作为发射源,其中所述巡回接收器装置(RRD)和接收装置(RD)被用在智能电话中。该附图示出了随时间从位置A到位置B向巡回参考装置(RRD)160以及接收装置(RD)170发射信号120、130、140、150的LEO卫星110。
RRD160和RD170中的每个均被用在智能电话中。智能电话的用户已经下载关联的定位或地理定位应用到他们的智能电话上。此外,智能电话的用户已经选择和同意参与从其他参与的智能电话接收定位信息(和/或差分校正信息),以及分享他们自身的具体定位信息,以便定位或地理定位应用的使用。智能电话中的处理器运行地理定位应用,以便生成差分校正信息。在这个附图中,RRD160被示出在室外,在此其可以很容易接收GPS信号,从而获得其自身的非常精确的位置。RRD160的精确的位置信息可以被用于生成差分校正信息,其可以被RD170以及其他附近参与的智能电话使用。还在这个附图中,RD170被示出位于建筑物115的内部。由于RD170位于室内环境中,因此其不能接收GPS信号。RD170使用RRD160的精确的位置信息(和/或差分校正信息),以便能够获得其自身的精确位置。需要注意的是,在一个或更多实施例中,RRD160和RD170可以被用在各种不同类型的个人装置中,包括但不限于,蜂窝电话、个人数字助理(PDA)以及便携式计算机。
对于本系统,RRD160和RD170处于彼此相对靠近的位置,以便他们具有类似的大气条件180。RRD160经由GPS信号精确地知道LEO卫星110的位置以及其自身的RRD160的位置。由于GPS精确度有助于校正RD170的位置,因此RRD160从GPS信号得到其位置。
在某些实施例中,RRD160自身不处理其所接收的GPS信号,以确定其自身的精确位置。在这些实施例中,RRD160向中间节点(例如,处理设施)发射其接收的GPS信号,以便所述中间节点处理GPS信号和计算RRD160的精确位置。在所述中间节点处理GPS信号和确定RRD160的精确位置后,所述中间节点向RRD160发射RRD160的精确的位置信息。
RRD160包括用于接收LEO卫星110信号130、150的接收器;用于对来自接收的信号130、150的数据时间戳记接收时间的精确的时钟;以及用于存储时间戳记的数据的存储器。RRD160还包括处理器,其处理时间戳记的数据、RRD160的位置以及LEO卫星110的位置,以便生成差分校正信息;以及用于发射190所述差分校正信息的发射器。
RD170知道LEO卫星110的位置。RD170包括用于接收LEO卫星110信号120、140的第一接收器;用于对来自接收的信号120、140的数据时间戳记接收时间的精确的时钟;以及用于存储时间戳记的数据的存储器。此外,RD170包括用于接收来自RRD160的差分校正信息的第二接收器。而且,RD170具有处理器,其处理在其存储器中的时间戳记的数据和LEO卫星110的位置,以便生成其自身的位置估算。所述处理器还被用于处理差分校正信息以及RD170的位置估算,以便生成RD170的校正的位置估算。
作为示例,在时间t1的初始卫星位置A,LEO卫星110发送由RRD160在时间t2a和由RD170在时间t3a所接收的主信号120、130。RRD160的处理器计算差分校正信号t2-t2a,其中t2表示如果没有由于大气层180和/或其他条件造成的延迟,RRD160接收在时间t1发送的主信号的时间。这个时间t2通过LEO卫星110与已知的RRD160的位置之间的已知距离而计算。接着,RRD160向RD170发射190差分校正信息。RD170利用所述不同的差分校正信息来校正其所接收的信号。RD170利用所校正的定时,t3=t3a+t2a-t2,更新该RD170的位置,以便得到校正后的从RD170到LEO卫星110的距离。所述过程为多个卫星位置(包括位置B)重复,以便获得RD170的精确位置。
需要注意的是,在某些实施例中,RRD160和RD170从一个或更多区域性地面发射源接收射频(RF)信号,例如幅度调制(AM)或频率调制(FM)无线电发射器、电视发射器或其他本地发射器。对于这些实施例,RRD160和RD170测量载波信号的相位和/或在载波上调制的信号相对于其各自的本地时钟的到达时间。可替换地,RRD160和/或RD170向外部处理器提供那些RF信号的样本或预处理的样本(例如,滤波的和下变频的样本),以供额外的处理。在某些实施例中,RRD160的已知位置和时钟偏移与RF信号的测量值在RRD160处结合,以便发现本地发射器的时钟偏移或来自本地发射器的信号的发射时间。在至少一个实施例中,利用从LEO卫星多普勒和/或基于距离的定位获得的大致位置,与所述发射源的载波相位关联的载波相位模糊/多值性被消除。在一个或更多实施例中,多个发射源以类似于消除全球卫星导航系统(GNSS)的差分载波相位的GPS周期模糊的方式用于消除周期模糊的过程中。
图2示出了所公开的差分校正系统增强100的实施例,其利用巡回接收器并采用LEO卫星作为发射源,其中巡回参考装置(RRD)处理差分校正信息。在这个附图中,LEO卫星110被示为随时间从位置A到位置B,向巡回参考装置(RRD)160和接收装置(RD)170发射信号120、130、140、150。RRD160和RD170处于彼此相对靠近的位置,以便他们具有类似的大气条件180。RRD160经由GPS信号精确地知道LEO卫星110的位置及其自身位置。不过,需要注意的是,RRD160可以从若干不同的源得到LEO卫星110位置数据,所述源包括但不限于星历表、从LEO卫星110直接下行的数据、从蜂窝电话接收的数据以及来自互联网的数据。RRD160包括用于接收LEO卫星110信号130、150的接收器;用于对来自所接收到的信号130、150的数据时间戳记接收时间的精确的时钟;以及用于存储时间戳记的数据的存储器。RRD160还包括处理器165,其处理时间戳记的数据,RRD160的位置,以及LEO卫星110的位置,以便生成差分校正信息;以及用于发射190所述差分校正信息的发射器。
RD170知道LEO卫星110的位置。RD170可以从若干不同的源得到LEO卫星110的位置的数据,所述不同的源包括但不限于:星历表、从LEO卫星110直接下行的数据、从蜂窝电话接收的数据以及来自互联网的数据。RD170包括用于接收LEO卫星110信号120、140的第一接收器;用于对来自接收到的信号120、140的数据时间戳记接收时间的精确时钟;以及用于存储时间戳记的数据的存储器。此外,RD170包括用于从RRD160接收差分校正信息的第二接收器。而且,RD170具有处理器,其处理在其存储器中的时间戳记的数据和LEO卫星110的位置,以便生成其自身的位置估算。所述处理器还被用于处理差分校正信息以及RD170的位置估算,以便生成RD170的校正的位置估算。
作为示例,在时间t1的初始卫星位置A,LEO卫星110发送由RRD160在时间t2a和由RD170在时间t3a接收的主信号120、130。RRD160的处理器计算差分校正信号t2-t2a,其中t2表示如果没有由于大气层180和/或其他条件造成的延迟,RRD160接收在时间t1发送的主信号的时间。这个时间t2根据LEO卫星110与已知的RRD160的位置之间的已知距离计算。接着,RRD160向RD170发射190差分校正信息。RD170利用所述差分校正信息校正其所接收的信号。RD170利用校正的定时t3=t3a+t2a-t2来更新其位置,以便得到从RD170到LEO卫星110的校正的距离。所述过程为多个卫星位置(包括位置B)重复,以便获得RD170的精确位置。
图3示出了所公开的差分校正系统增强200的实施例,其利用巡回接收器并采用LEO卫星作为发射源,其中所述接收装置(RD)处理差分校正信息。在这个附图中,LEO卫星110被示为随时间从位置A到位置B向巡回参考装置(RRD)160和向接收装置(RD)170发射信号120、130、140、150。RRD160和RD170处于彼此相对靠近的位置,以便他们具有类似的大气层条件180。此外,RRD160经由GPS信号精确地知道其自身的位置。RRD160包括用于接收LEO卫星110信号130、150的接收器;用于对来自接收到的信号130、150的数据时间戳记接收时间的精确的时钟;以及用于发射190包含时间戳记的数据和RRD的位置的RRD信号的发射器。
RD170知道LEO卫星110的位置。RD170包括用于接收LEO卫星110信号120、140的第一接收器;以及用于对来自接收到的信号120、140的数据时间戳记接收时间的精确的时钟。而且,RD170包括用于从所述RRD接收RRD信号的第二接收器。此外,RD170具有用于存储其时间戳记的数据、来自RRD信号的数据以及LEO卫星110的位置的存储器。而且,RD170具有处理器175,其处理所述RD的时间戳记的数据和LEO卫星110的位置,以便生成其自身的位置估算。此外,处理器175被用于处理RRD170的时间戳记的数据以及RRD170的位置,以便生成差分校正信息。此外,处理器175被用于处理所述差分校正信息和RD160的位置估算,以便生成RD160的校正的位置估算。
在时间t1的初始卫星位置A,LEO卫星发送由RRD160在时间t2a和由RD170在时间t3a接收的主信号120、130。RRD160向RD170发送其位置和时间t2a,以供处理。通过RRD160的位置信息和时间t2a,RD170计算差分校正信号t2-t2a,其中t2表示如果没有由于大气层180和/或其他条件造成的延迟,RRD160接收在时间t1发送的主信号的时间。这个时间t2根据卫星110与已知的RRD160位置之间的已知的距离计算。RD170利用这个差分校正来校正其在时间t3a接收的信号。利用校正的定时t3=t3a+t2a-t2,得到从RD170到卫星110的距离,RD170更新其位置。这个过程为多个卫星位置(包括位置B)重复,以便获得RD170的精确的位置。
图4示出了所公开的差分校正系统增强300的实施例,其利用巡回接收器并采用LEO卫星作为发射源,其中所述中间装置处理差分校正信息。在这个附图中,LEO卫星110被示为随时间从位置A到位置B,向巡回参考装置(RRD)160和向接收装置(RD)170发射信号120、130、140、150。RRD160和RD170处于彼此相对靠近的位置,以便它们具有类似的大气层条件180。此外,RRD160经由GPS信号精确地知道其自身的位置。RRD160包括用于接收LEO卫星110信号130、150的接收器;用于对来自接收的信号130、150的数据时间戳记接收时间的精确的时钟;以及用于发射190包含时间戳记的数据和RRD的位置的RRD信号的发射器。
RD170包括用于接收LEO卫星110信号120、140的接收器;用于对来自接收的信号120、140的数据时间戳记接收时间的精确的时钟;以及用于发射192包含所述RD的时间戳记的数据的RD信号的发射器。
所述中间装置195包括用于接收来自RRD160的RRD信号的第一接收器,以及用于接收来自RD170的RD信号的第二接收器。此外,中间装置195包括处理器197,其处理所述RRD信号的数据,所述RD信号的数据和LEO卫星110的位置,以便生成RD170的位置估算和生成差分校正信息。此外,处理器197被用于处理所述差分校正信息和RD170的位置估算,以便生成RD170的校正的位置估算。
在这个示例中,在时间t1的初始卫星位置A,LEO卫星110发送由RRD160在时间t2a和由RD170在时间t3a接收的主信号120、130。RRD160向中间装置195发送其位置和时间t2a。RD170向中间装置195发送时间t3a。通过RRD160的位置信息和时间t2a,中间装置195计算差分校正信号t2-t2a,其中t2表示如果没有由于大气层180和其他条件造成的延迟,RRD160接收在时间t1发送的主信号的时间。这个时间t2根据LEO卫星110与已知的RD170位置之间的已知距离计算。利用这个差分校正,中间装置195校正所述RD在时间t3a接收的信号。利用校正的定时t3=t3a+t2a-t2,得到从RD170到LEO卫星110的距离,中间装置195更新RD170的位置。在至少一个实施例中,这个RD170位置信息被发送给RD170。这个过程为多个卫星位置(包括位置B)重复,以便获得RD170的精确的位置。
图5示出了所公开的差分校正系统增强400的实施例,其利用巡回接收器并采用Wi-Fi节点作为发射源,其中所述RRD处理差分校正信息。在这个附图中,Wi-Fi节点410被示为分别向巡回参考装置(RRD)160和向接收装置(RD)170发射信号120、130。RRD160和RD170处于彼此相对靠近的位置,以便它们具有类似的大气条件。不过,需要注意的是,Wi-Fi节点140的时钟误差有可能大于大气层误差。
RRD160经由GPS信号精确地知道Wi-Fi节点410的位置以及其自身的位置。RRD160和RD170能够从各种源得到Wi-Fi节点410的位置信息,所述各种源包括但不限于:数据库、来自蜂窝电话连接的数据、来自互联网的数据,以及Wi-Fi节点410自身向RRD160和/或RD170发射的其自身的位置信息。RRD160包括用于接收Wi-Fi节点410信号130的接收器;用于对来自接收的信号130的数据时间戳记接收时间的精确的时钟;以及用于存储时间戳记的数据的存储器。RRD160还包括处理器165,其处理时间戳记的数据、RRD160的位置以及Wi-Fi节点410的位置,以便生成差分校正信息;以及用于发射190所述差分校正信息的发射器。
RD170知道Wi-Fi节点410的位置。RD170包括用于接收Wi-Fi节点410信号120的第一接收器;用于对来自接收的信号120的数据时间戳记接收时间的精确的时钟;以及用于存储时间戳记的数据的存储器。此外,RD170包括用于从RRD160接收差分校正信息的第二接收器。而且,RD170具有处理器,其处理在其存储器中的时间戳记的数据和Wi-Fi节点410的位置,以便生成其自身的位置估算。所述处理器还被用于处理差分校正信息以及RD170的位置估算,以便生成RD170的校正的位置估算。
需要注意的是,在这种情况下,用于接收所述差分校正信息的第二接收器是不需要的。代替上述示例的是,Wi-Fi通信信道自身可以被用于将所述差分校正信息从RRD160传送到RD170。
在这个示例中,在时间t1的静态Wi-Fi节点410位置,Wi-Fi节点410发送由RRD160在时间t2a和由RD在时间t3a接收的主信号120、130。RRD160计算差分校正信号t2-t2a,其中t2表示如果没有由于大气层和/或其他条件造成的延迟,RRD160接收在时间t1发送的主信号的时间。这个时间t2根据Wi-Fi节点410与已知的RRD160位置之间的已知距离计算。RRD160、RD170和Wi-Fi节点140全部具有精确的时钟。Wi-Fi节点140发射可以被用于定时(即,测距)的信号。需要注意的是,测距不需要高带宽信号,并且精确度是信号时间带宽乘积的函数。所述差分校正信号从RRD160被发送190到RD170。利用这个差分校正,RD170校正其信号t3a。利用所校正的定时t3=t3a+t2a-t2,RD170更新其位置,以便得到从RD170到Wi-Fi节点410的校正的距离。
虽然本文已经公开了特定的说明性实施例和方法,但是在没有偏离本公开的精神和范围的情况下,可以对前述公开的实施例和方法进行各种改进和改变,这对于本领域的技术人员来说是显而易见的。存在本公开的本领域的许多其他示例,其中的每个与其他示例的不同之处仅在于细节的不同。因此,本公开应当仅由所附权利要求和适用法律的规则和原则所限定。
Claims (32)
1.一种用于提供对定位的差分校正的系统,所述系统包括:
巡回参考装置即RRD,其知道其自身的地理位置,所述RRD包括:
用于接收来自至少一个发射源的信号的RRD接收器,其中所述RRD知道所述至少一个发射源的位置,
用于收集所述信号的第一测量值的RRD时钟,
用于存储所述第一测量值的RRD存储器,
RRD处理器,其用于处理所述第一测量值、所述RRD的位置以及所述至少一个发射源的位置,以便生成差分校正信息,
RRD发射器,其用于发射包括所述差分校正信息的差分校正信息信号;以及
接收装置(RD),其包括:
RD第一接收器,其用于接收来自所述至少一个发射源的信号,其中所述RD知道所述至少一个发射源的位置,
用于收集所述信号的第二测量值的RD时钟,
用于存储所述第二测量值的RD存储器,
用于接收来自所述RRD的差分校正信息信号的RD第二接收器,
RD处理器,其用于处理所述差分校正信息、所述第二测量值以及所述至少一个发射源的位置,以便生成所述RD的位置估算。
2.根据权利要求1所述的系统,其中所述RRD知道其自身的位置,这是因为所述RRD进一步包括用于接收GPS信号的全球定位系统即GPS接收器,以及GPS处理器,其用于处理GPS信号以便获得所述RRD的位置。
3.根据权利要求1所述的系统,其中所述RRD知道其自身的位置,这是因为所述RRD进一步包括接收来自基站的信号的蜂窝接收器,以及蜂窝处理器,其用于处理所述信号以便获得所述RRD的位置。
4.根据权利要求1所述的系统,其中所述RRD通过利用惯性参考系统而知道其自身的位置。
5.根据权利要求1所述的系统,其中所述RRD通过利用地图和地形数据中的至少一个而知道其自身的位置。
6.根据权利要求1所述的系统,其中所述至少一个发射源是卫星、伪卫星、地面发射器、Wi-Fi发射器以及基站发射器中的至少一个。
7.根据权利要求1所述的系统,其中所述RRD知道所述至少一个发射源的位置,这是因为所述RRD接收器从所述至少一个发射源接收指示所述至少一个发射源的位置的位置信号,以及
其中所述RRD处理器处理所述位置信号,以便获得所述至少一个发射源的位置。
8.根据权利要求1所述的系统,其中所述RRD是可移动和静态中的至少一个。
9.根据权利要求1所述的系统,其中所述RRD发射器利用无线或有线连接中的至少一个发射所述差分校正信息信号。
10.根据权利要求1所述的系统,其中所述RD知道所述至少一个发射源的位置,这是因为所述RD第一接收器从所述至少一个发射源接收指示所述至少一个发射源的位置的位置信号,以及
其中所述RD处理器处理所述位置信号,以便获得所述至少一个发射源的位置。
11.根据权利要求1所述的系统,其中所述RRD发射器经由中间装置向RD第二接收器发射所述差分校正信息信号。
12.一种用于提供对定位的差分校正的系统,所述系统包括:
巡回参考装置即RRD,其知道其自身的地理位置,所述RRD包括:
用于接收来自至少一个发射源的信号的RRD接收器,
用于收集所述信号的第一测量值的RRD时钟,
用于发射RRD信号的RRD发射器,所述RRD信号包括第一测量值和所述RRD的位置;以及
接收装置即RD,其包括:
RD第一接收器,其用于接收来自所述至少一个发射源的信号,其中所述RD知道所述至少一个发射源的位置,
用于收集所述信号的第二测量值的RD时钟,
用于接收来自所述RRD的RRD信号的RD第二接收器,
用于存储所述第一测量值、第二测量值以及所述RRD的位置的RD存储器,
RD处理器,其用于处理所述第二测量值以及所述至少一个发射源的位置,以便生成所述RD的位置估算,
所述RD处理器还用于处理所述第一测量值、所述RRD的位置以及所述至少一个发射源的位置,以便生成差分校正信息,以及
所述RD处理器还用于处理所述差分校正信息以及所述RD的位置估算,以便生成所述RD的校正的位置估算。
13.根据权利要求14所述的系统,其中所述RRD知道其自身的位置,这是因为所述RRD进一步包括用于接收GPS信号的全球定位系统即GPS接收器,以及GPS处理器,其用于处理GPS信号以便获得所述RRD的位置。
14.根据权利要求14所述的系统,其中所述RRD知道其自身的位置,这是因为所述RRD进一步包括接收来自基站的信号的蜂窝接收器,以及蜂窝处理器,其用于处理所述信号以便获得所述RRD的位置。
15.根据权利要求14所述的系统,其中所述RRD通过利用惯性参考系统而知道其自身的位置。
16.根据权利要求14所述的系统,其中所述RRD通过利用地图和地形数据中的至少一个而知道其自身的位置。
17.根据权利要求14所述的系统,其中所述RRD是可移动和静态中的至少一个。
18.根据权利要求14所述的系统,其中所述RRD发射器利用无线或有线连接中的至少一个发射所述RRD信号。
19.根据权利要求14所述的系统,其中所述至少一个发射源是卫星、伪卫星、地面发射器、Wi-Fi发射器和基站发射器中的至少一个。
20.根据权利要求14所述的系统,其中所述RD知道所述至少一个发射源的位置,这是因为所述RD第一接收器接收来自所述至少一个发射源的指示所述至少一个发射源的位置的位置信号,以及
其中所述RD处理器处理所述位置信号,以便获得所述至少一个发射源的位置。
21.根据权利要求14所述的系统,其中所述RRD发射器经由中间装置向所述RD第二接收器发射RRD信号。
22.一种用于提供对定位的差分校正的系统,所述系统包括:
巡回参考装置即RRD,其知道其自身的地理位置,所述RRD包括:
用于接收来自至少一个发射源的信号的RRD接收器,
用于收集所述信号的第一测量值的RRD时钟,
用于发射RRD信号的RRD发射器,所述RRD信号包括所述第一测量值和所述RRD的位置;
接收装置即RD,其包括:
用于接收来自所述至少一个发射源的信号的RD接收器,
用于收集所述信号的第二测量值的RD时钟,
用于发射RD信号的RD发射器,所述RD信号包括所述第二测量值;以及
知道所述至少一个发射源的位置的中间装置,所述中间装置包括:
用于接收来自所述RRD的RRD信号的中间第一接收器,
用于接收来自所述RD的RD信号的中间第二接收器,
中间处理器,其用于处理所述RRD信号的数据、所述RD信号的数据以及至少一个发射源的位置,以便生成所述RD的位置估算并生成差分校正信息,以及
所述中间处理器还用于处理所述差分校正信息以及所述RD的位置估算,以便生成所述RD的校正的位置估算。
23.根据权利要求22所述的系统,其中所述RRD知道其自身的位置,这是因为所述RRD进一步包括用于接收GPS信号的全球定位系统即GPS接收器,以及GPS处理器,其用于处理GPS信号以便获得所述RRD的位置。
24.根据权利要求22所述的系统,其中所述RRD知道其自身的位置,这是因为所述RRD进一步包括接收来自基站的信号的蜂窝接收器,以及蜂窝处理器,其用于处理所述信号以便获得所述RRD的位置。
25.根据权利要求22所述的系统,其中所述RRD通过利用惯性参考系统知道其自身的位置。
26.根据权利要求22所述的系统,其中所述RRD通过利用地图和地形数据中的至少一个而知道其自身的位置。
27.根据权利要求22所述的系统,其中所述RRD是可移动和静态中的至少一个。
28.根据权利要求22所述的系统,其中所述RRD发射器利用无线或有线连接中的至少一个发射所述RRD信号。
29.根据权利要求22所述的系统,其中所述至少一个发射源是卫星、伪卫星、地面发射器、Wi-Fi发射器和基站发射器中的至少一个。
30.根据权利要求29所述的系统,其中所述至少一个卫星是低地轨道即LEO卫星、中地轨道即MEO卫星和地球同步轨道即GEO卫星中的至少一个。
31.根据权利要求30所述的系统,其中所述至少一个LEO卫星是铱卫星。
32.根据权利要求22所述的系统,其中所述RD发射器利用无线或有线连接中的至少一个发射所述RD信号。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/114,027 | 2011-05-23 | ||
| US13/114,027 US8570216B2 (en) | 2008-05-30 | 2011-05-23 | Differential correction system enhancement leverages roving receivers enabled for a non-GPS, secondary PN and T signal to characterize local errors |
| PCT/US2012/035661 WO2012161923A1 (en) | 2011-05-23 | 2012-04-27 | Differential correction system enhancement leverages roving receivers enabled for a non-gps, secondary pn&t signal to characterize local errors |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103562741A true CN103562741A (zh) | 2014-02-05 |
Family
ID=46086057
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201280025505.2A Pending CN103562741A (zh) | 2011-05-23 | 2012-04-27 | 利用巡回接收器启用非gps、第二pn&t信号表征本地误差的差分校正系统增强 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8570216B2 (zh) |
| EP (1) | EP2715391A1 (zh) |
| JP (1) | JP6165721B2 (zh) |
| CN (1) | CN103562741A (zh) |
| CA (1) | CA2828323C (zh) |
| WO (1) | WO2012161923A1 (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105516251A (zh) * | 2015-11-26 | 2016-04-20 | 阿坝师范学院 | 一种定位校准方法及其位置服务推送系统 |
| CN107290764A (zh) * | 2016-04-13 | 2017-10-24 | 苏州宝时得电动工具有限公司 | 差分全球定位系统及其定位方法 |
| CN108283005A (zh) * | 2015-04-06 | 2018-07-13 | 世界卫星有限公司 | 用于用户终端位置的仰角估计系统和方法 |
| CN109471134A (zh) * | 2017-09-08 | 2019-03-15 | 网络搜索系统公司 | 地理定位分析系统和运营商网络装备参数的自动校准 |
| CN115202187A (zh) * | 2019-04-02 | 2022-10-18 | 卡西欧计算机株式会社 | 电子表、信息更新控制方法以及程序 |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8838481B2 (en) | 2011-07-26 | 2014-09-16 | Golba Llc | Method and system for location based hands-free payment |
| US8314736B2 (en) | 2008-03-31 | 2012-11-20 | Golba Llc | Determining the position of a mobile device using the characteristics of received signals and a reference database |
| US8344949B2 (en) | 2008-03-31 | 2013-01-01 | Golba Llc | Wireless positioning approach using time-delay of signals with a known transmission pattern |
| US8838477B2 (en) | 2011-06-09 | 2014-09-16 | Golba Llc | Method and system for communicating location of a mobile device for hands-free payment |
| US8193978B2 (en) | 2007-11-14 | 2012-06-05 | Golba Llc | Positioning system and method using GPS with wireless access points |
| US8892112B2 (en) | 2011-07-21 | 2014-11-18 | At&T Mobility Ii Llc | Selection of a radio access bearer resource based on radio access bearer resource historical information |
| US7800541B2 (en) | 2008-03-31 | 2010-09-21 | Golba Llc | Methods and systems for determining the location of an electronic device |
| US9829560B2 (en) | 2008-03-31 | 2017-11-28 | Golba Llc | Determining the position of a mobile device using the characteristics of received signals and a reference database |
| US8326319B2 (en) | 2009-01-23 | 2012-12-04 | At&T Mobility Ii Llc | Compensation of propagation delays of wireless signals |
| US9008684B2 (en) | 2010-02-25 | 2015-04-14 | At&T Mobility Ii Llc | Sharing timed fingerprint location information |
| US9196157B2 (en) | 2010-02-25 | 2015-11-24 | AT&T Mobolity II LLC | Transportation analytics employing timed fingerprint location information |
| US8254959B2 (en) | 2010-02-25 | 2012-08-28 | At&T Mobility Ii Llc | Timed fingerprint locating for idle-state user equipment in wireless networks |
| US8224349B2 (en) | 2010-02-25 | 2012-07-17 | At&T Mobility Ii Llc | Timed fingerprint locating in wireless networks |
| US9053513B2 (en) | 2010-02-25 | 2015-06-09 | At&T Mobility Ii Llc | Fraud analysis for a location aware transaction |
| US8447328B2 (en) | 2010-08-27 | 2013-05-21 | At&T Mobility Ii Llc | Location estimation of a mobile device in a UMTS network |
| US9009629B2 (en) | 2010-12-01 | 2015-04-14 | At&T Mobility Ii Llc | Motion-based user interface feature subsets |
| US8612410B2 (en) | 2011-06-30 | 2013-12-17 | At&T Mobility Ii Llc | Dynamic content selection through timed fingerprint location data |
| US9462497B2 (en) | 2011-07-01 | 2016-10-04 | At&T Mobility Ii Llc | Subscriber data analysis and graphical rendering |
| US8761799B2 (en) | 2011-07-21 | 2014-06-24 | At&T Mobility Ii Llc | Location analytics employing timed fingerprint location information |
| US8897802B2 (en) | 2011-07-21 | 2014-11-25 | At&T Mobility Ii Llc | Selection of a radio access technology resource based on radio access technology resource historical information |
| US9519043B2 (en) * | 2011-07-21 | 2016-12-13 | At&T Mobility Ii Llc | Estimating network based locating error in wireless networks |
| US8666390B2 (en) | 2011-08-29 | 2014-03-04 | At&T Mobility Ii Llc | Ticketing mobile call failures based on geolocated event data |
| US8923134B2 (en) | 2011-08-29 | 2014-12-30 | At&T Mobility Ii Llc | Prioritizing network failure tickets using mobile location data |
| US8762048B2 (en) | 2011-10-28 | 2014-06-24 | At&T Mobility Ii Llc | Automatic travel time and routing determinations in a wireless network |
| US8909247B2 (en) | 2011-11-08 | 2014-12-09 | At&T Mobility Ii Llc | Location based sharing of a network access credential |
| US9026133B2 (en) | 2011-11-28 | 2015-05-05 | At&T Mobility Ii Llc | Handset agent calibration for timing based locating systems |
| US8970432B2 (en) | 2011-11-28 | 2015-03-03 | At&T Mobility Ii Llc | Femtocell calibration for timing based locating systems |
| US8925104B2 (en) | 2012-04-13 | 2014-12-30 | At&T Mobility Ii Llc | Event driven permissive sharing of information |
| US8929827B2 (en) | 2012-06-04 | 2015-01-06 | At&T Mobility Ii Llc | Adaptive calibration of measurements for a wireless radio network |
| US9094929B2 (en) | 2012-06-12 | 2015-07-28 | At&T Mobility Ii Llc | Event tagging for mobile networks |
| US9046592B2 (en) | 2012-06-13 | 2015-06-02 | At&T Mobility Ii Llc | Timed fingerprint locating at user equipment |
| US9326263B2 (en) | 2012-06-13 | 2016-04-26 | At&T Mobility Ii Llc | Site location determination using crowd sourced propagation delay and location data |
| US8938258B2 (en) | 2012-06-14 | 2015-01-20 | At&T Mobility Ii Llc | Reference based location information for a wireless network |
| US8897805B2 (en) | 2012-06-15 | 2014-11-25 | At&T Intellectual Property I, L.P. | Geographic redundancy determination for time based location information in a wireless radio network |
| US9408174B2 (en) | 2012-06-19 | 2016-08-02 | At&T Mobility Ii Llc | Facilitation of timed fingerprint mobile device locating |
| US8892054B2 (en) | 2012-07-17 | 2014-11-18 | At&T Mobility Ii Llc | Facilitation of delay error correction in timing-based location systems |
| US9351223B2 (en) | 2012-07-25 | 2016-05-24 | At&T Mobility Ii Llc | Assignment of hierarchical cell structures employing geolocation techniques |
| US9671501B2 (en) * | 2012-09-26 | 2017-06-06 | Trimble Inc. | Global navigation satellite systems (GNSS) positioning using precise satellite data |
| US9645241B1 (en) * | 2013-03-14 | 2017-05-09 | Google Inc. | Using data from non-surveyed devices to generate geopositioning corrections for portable devices |
| DE102013205486A1 (de) * | 2013-03-27 | 2014-10-02 | Deere & Company | Anordnung und Verfahren zur Positionserfassung mit einem Handgerät |
| US9781378B2 (en) | 2014-09-09 | 2017-10-03 | The Boeing Company | Coordinating image sensing with motion |
| US9351111B1 (en) | 2015-03-06 | 2016-05-24 | At&T Mobility Ii Llc | Access to mobile location related information |
| CN105372688A (zh) * | 2015-12-08 | 2016-03-02 | 广州中海达卫星导航技术股份有限公司 | 一种小体积定位模块 |
| FR3046313B1 (fr) * | 2015-12-23 | 2019-05-31 | Thales | Solution a repartition spatiale massive pour constellation telecom |
| DE102016120235A1 (de) * | 2016-10-24 | 2018-04-26 | Geo++ GmbH | Verfahren und System zum Ermitteln einer Position einer mobilen Vorrichtung |
| EP3355079B8 (en) * | 2017-01-25 | 2023-06-21 | Airbus Defence and Space GmbH | Method for each of a plurality of satellites of a secondary global navigation satellite system in a low earth orbit |
| US10555131B2 (en) * | 2018-05-31 | 2020-02-04 | Qualcomm Incorporated | Carrier-phase positioning in cellular networks |
| US10516972B1 (en) | 2018-06-01 | 2019-12-24 | At&T Intellectual Property I, L.P. | Employing an alternate identifier for subscription access to mobile location information |
| US11638153B2 (en) * | 2020-04-01 | 2023-04-25 | Higher Ground Llc | Interferometry-based satellite location accuracy |
| GB2600907A (en) * | 2020-08-10 | 2022-05-18 | Veeride Geo Ltd | Proximity-based navigation method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6100842A (en) * | 1998-02-20 | 2000-08-08 | Trimble Navigation Limited | Chained location determination system |
| US20070159388A1 (en) * | 2004-01-28 | 2007-07-12 | Motorola, Inc. | Communication system, a communication terminal and a method of determining a location estimate therefor |
| CN101504454A (zh) * | 2009-03-13 | 2009-08-12 | 东南大学 | Gnss网络综合定位服务系统实现方法 |
| CN102047136A (zh) * | 2008-05-30 | 2011-05-04 | 波音公司 | 利用卫星系统的因特网热点定位 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5734348A (en) | 1995-08-31 | 1998-03-31 | Nikon Corporation | Surveying system using GPS |
| JPH0968428A (ja) * | 1995-08-31 | 1997-03-11 | Nikon Corp | 汎地球測位システムを用いた測量装置 |
| US6185427B1 (en) * | 1996-09-06 | 2001-02-06 | Snaptrack, Inc. | Distributed satellite position system processing and application network |
| US6529830B1 (en) | 1997-08-04 | 2003-03-04 | Trimble Navigation Ltd. | Method and system for providing wide area augmentation systems (WAAS) like corrections using a server and processor on the internet |
| JP2003215228A (ja) * | 2002-01-23 | 2003-07-30 | Hitachi Ltd | 位置表示機能付き移動端末装置及び位置表示方法 |
| US7042392B2 (en) | 2003-05-30 | 2006-05-09 | The Boeing Company | GPS access system and method |
| US7489926B2 (en) * | 2004-01-15 | 2009-02-10 | The Boeing Company | LEO-based positioning system for indoor and stand-alone navigation |
| US7904243B2 (en) | 2004-01-15 | 2011-03-08 | The Boeing Company | Real-time data aiding for enhanced GPS performance |
| JP2006038734A (ja) * | 2004-07-29 | 2006-02-09 | Seiko Epson Corp | 測位システム、端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2006112822A (ja) * | 2004-10-12 | 2006-04-27 | Mitsubishi Electric Corp | 移動局、dgps基準局、dgpsセンター局、及びdgps測位システム |
| US7372400B2 (en) | 2005-11-07 | 2008-05-13 | The Boeing Company | Methods and apparatus for a navigation system with reduced susceptibility to interference and jamming |
| US7619559B2 (en) | 2006-03-15 | 2009-11-17 | The Boeing Company | Method and system for all-in-view coherent GPS signal PRN codes acquisition and navigation solution determination |
| US7688261B2 (en) | 2006-03-15 | 2010-03-30 | The Boeing Company | Global position system (GPS) user receiver and geometric surface processing for all-in-view coherent GPS signal PRN codes acquisition and navigation solution |
| US7579986B2 (en) | 2006-03-15 | 2009-08-25 | The Boeing Company | Method and system for all-in-view coherent GPS signal PRN codes acquisition and navigation solution determination |
| DE102006016396A1 (de) * | 2006-04-07 | 2007-10-11 | Deere & Company, Moline | Mobile Referenzstation zur Erzeugung von Korrektursignalen für eine differentielle Positionsbestimmungseinrichtung |
| US7579987B2 (en) | 2006-05-18 | 2009-08-25 | The Boeing Company | Low earth orbit satellite providing navigation signals |
| US7583225B2 (en) | 2006-05-18 | 2009-09-01 | The Boeing Company | Low earth orbit satellite data uplink |
| US8296051B2 (en) | 2006-05-18 | 2012-10-23 | The Boeing Company | Generalized high performance navigation system |
| US7554481B2 (en) | 2006-05-18 | 2009-06-30 | The Boeing Company | Localized jamming of navigation signals |
| US7468697B2 (en) * | 2006-08-04 | 2008-12-23 | Novariant, Inc. | Self-surveying wideband ground transmitters |
| US7468696B2 (en) | 2006-12-14 | 2008-12-23 | The Boeing Company | Method and device for trilateration using LOS link prediction and pre-measurement LOS path filtering |
| US7783301B2 (en) | 2006-12-19 | 2010-08-24 | The Boeing Company | Method and device for determining a location of a communications device |
| US7701393B2 (en) | 2006-12-19 | 2010-04-20 | The Boeing Company | Radio frequency navigation using frequency response matching |
| US20090228210A1 (en) | 2007-06-28 | 2009-09-10 | The Boeing Company | Navigation system based on neutrino detection |
| US7969352B2 (en) | 2008-01-08 | 2011-06-28 | The Boeing Company | Global positioning system accuracy enhancement |
| US8035558B2 (en) | 2008-05-30 | 2011-10-11 | The Boeing Company | Precise absolute time transfer from a satellite system |
| KR100941142B1 (ko) | 2009-01-06 | 2010-02-09 | 주식회사 텔에이스 | 데이터 통신망을 이용한 위치 추적 시스템 및 그 방법 |
| US7859455B2 (en) | 2009-01-06 | 2010-12-28 | The Boeing Company | Local clock frequency calibration using low earth orbit (LEO) satellites |
-
2011
- 2011-05-23 US US13/114,027 patent/US8570216B2/en active Active
-
2012
- 2012-04-27 EP EP12721641.4A patent/EP2715391A1/en active Pending
- 2012-04-27 WO PCT/US2012/035661 patent/WO2012161923A1/en unknown
- 2012-04-27 JP JP2014512849A patent/JP6165721B2/ja active Active
- 2012-04-27 CA CA2828323A patent/CA2828323C/en active Active
- 2012-04-27 CN CN201280025505.2A patent/CN103562741A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6100842A (en) * | 1998-02-20 | 2000-08-08 | Trimble Navigation Limited | Chained location determination system |
| US20070159388A1 (en) * | 2004-01-28 | 2007-07-12 | Motorola, Inc. | Communication system, a communication terminal and a method of determining a location estimate therefor |
| CN102047136A (zh) * | 2008-05-30 | 2011-05-04 | 波音公司 | 利用卫星系统的因特网热点定位 |
| CN101504454A (zh) * | 2009-03-13 | 2009-08-12 | 东南大学 | Gnss网络综合定位服务系统实现方法 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108283005A (zh) * | 2015-04-06 | 2018-07-13 | 世界卫星有限公司 | 用于用户终端位置的仰角估计系统和方法 |
| CN108283005B (zh) * | 2015-04-06 | 2021-01-19 | 世界卫星有限公司 | 用于用户终端位置的仰角估计系统和方法 |
| CN105516251A (zh) * | 2015-11-26 | 2016-04-20 | 阿坝师范学院 | 一种定位校准方法及其位置服务推送系统 |
| CN105516251B (zh) * | 2015-11-26 | 2020-04-10 | 阿坝师范学院 | 一种定位校准方法及其位置服务推送系统 |
| CN107290764A (zh) * | 2016-04-13 | 2017-10-24 | 苏州宝时得电动工具有限公司 | 差分全球定位系统及其定位方法 |
| CN107290764B (zh) * | 2016-04-13 | 2021-01-05 | 苏州宝时得电动工具有限公司 | 差分全球定位系统及其定位方法 |
| CN109471134A (zh) * | 2017-09-08 | 2019-03-15 | 网络搜索系统公司 | 地理定位分析系统和运营商网络装备参数的自动校准 |
| CN109471134B (zh) * | 2017-09-08 | 2023-09-29 | 网络搜索系统公司 | 地理定位分析系统和运营商网络装备参数的自动校准 |
| CN115202187A (zh) * | 2019-04-02 | 2022-10-18 | 卡西欧计算机株式会社 | 电子表、信息更新控制方法以及程序 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012161923A1 (en) | 2012-11-29 |
| JP6165721B2 (ja) | 2017-07-19 |
| US20120139782A1 (en) | 2012-06-07 |
| CA2828323C (en) | 2016-06-21 |
| JP2014523519A (ja) | 2014-09-11 |
| CA2828323A1 (en) | 2012-11-29 |
| US8570216B2 (en) | 2013-10-29 |
| EP2715391A1 (en) | 2014-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103562741A (zh) | 利用巡回接收器启用非gps、第二pn&t信号表征本地误差的差分校正系统增强 | |
| US9013350B2 (en) | Systems and methods for using a satellite positioning system to detect moved WLAN access points | |
| US8063820B2 (en) | Methods and systems for determining location using a hybrid satellite and WLAN positioning system by selecting the best SPS measurements | |
| KR100581290B1 (ko) | 위치 측정을 위한 기지국 장치 및 단말기, 그 위치 측정방법 | |
| US20090303115A1 (en) | Methods and systems for stationary user detection in a hybrid positioning system | |
| CN100381835C (zh) | 基于数字广播电视信号的无线电组合定位方法 | |
| CN101738598B (zh) | 对卫星或飞行器轨道和位置实时精密测量方法 | |
| Oxley | Uncertainties in GPS Positioning: A mathematical discourse | |
| CN103329000A (zh) | 无线地理定位网络中的对等感测站的网络定位以及同步 | |
| Bill et al. | Indoor and outdoor positioning in mobile environments a review and some investigations on wlan positioning | |
| KR102268380B1 (ko) | 정밀 측위 기법을 활용한 이동국 간의 거리 측정 방법 및 이를 이용한 골퍼와 홀 컵 간의 거리 측정 시스템 및 방법 | |
| Manandhar et al. | Results of IMES (indoor messaging system) implementation for seamless indoor navigation and social infrastructure platform | |
| US20150084813A1 (en) | Gps positioning system | |
| KR101385598B1 (ko) | 실내외 연속 측위를 위한 gps신호 생성 장치 및 방법, 이를 포함하는 실내외 연속 측위 시스템 | |
| US20100094554A1 (en) | Systems and Methods for Accessing Data Over a Short-range Data Link to Enhance the Performance of a Navigational Unit | |
| Yu et al. | Multi-source fusion positioning algorithm based on pseudo-satellite for indoor narrow and long areas | |
| Facchi et al. | Emitter localisation from reception timestamps in asynchronous networks | |
| CN103149550B (zh) | 一种自适应的自组织、多模式定位方法 | |
| KR20190139084A (ko) | Lte 기반 이동 통신 기지국을 이용한 이동국의 위치 보정 방법 | |
| Stephenson et al. | Implementation of V2X with the integration of Network RTK: Challenges and solutions | |
| CN106154228A (zh) | 基于无电文导航信号的定位方法及其设备 | |
| Al Nabhan | Adaptive, reliable, and accurate positioning model for location-based services | |
| Shahid | Study of the Impact of Dual-Band GNSS in Urban Environment | |
| Kara et al. | Low Cost Differential GPS receivers (LCD-GPS): The differential correction function | |
| Zhao et al. | Comparison of time transfer of IF-PPP, GIM-PPP, and RIM-PPP |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20140205 |
|
| RJ01 | Rejection of invention patent application after publication |