CN103327223A - 摄像装置 - Google Patents
摄像装置 Download PDFInfo
- Publication number
- CN103327223A CN103327223A CN2013100896310A CN201310089631A CN103327223A CN 103327223 A CN103327223 A CN 103327223A CN 2013100896310 A CN2013100896310 A CN 2013100896310A CN 201310089631 A CN201310089631 A CN 201310089631A CN 103327223 A CN103327223 A CN 103327223A
- Authority
- CN
- China
- Prior art keywords
- main lens
- microlens array
- lenticule
- unit
- camera head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0075—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for altering, e.g. increasing, the depth of field or depth of focus
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/102—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens controlled by a microcomputer
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/62—Control of parameters via user interfaces
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/95—Computational photography systems, e.g. light-field imaging systems
- H04N23/957—Light-field or plenoptic cameras or camera modules
Abstract
本发明提供一种摄像装置(1),具备:摄像元件(41);将来自被拍摄体的光向摄像元件(41)的方向进行会聚的主透镜(21);以及由被配置在摄像元件(41)与主透镜(21)之间、且使透过主透镜(21)的光在摄像元件(41)上成像的多个微透镜构成的微透镜阵列(31)。微透镜阵列(31),由焦点距离不同的多种类的微透镜(31A)、(31B)及(31C)构成,多种类中的至少一种微透镜(31A)具有与其他种类的微透镜(31B)及(31C)不同的分布形态。
Description
技术领域
本发明涉及摄像装置。
背景技术
近年来,一种对与入射光线的方向分布(direction distribution)有关的信息进行取入的摄像装置即全光照相机(plenoptic camera)被提出(例如参照专利文献1:日本特表2009-532993号公报)。
该全光照相机在现有的摄像透镜即主透镜与摄像元件之间配置有通过将多个极小透镜(以下称作“微透镜”)配置成网格状而构成的微透镜阵列。
构成微透镜阵列的各个微透镜将通过主透镜所会聚的光根据其到来的角度而会聚到摄像元件内的多个像素。全光照相机通过对由各个微透镜会聚到摄像元件内的各个像素的像(以下称作“子图像”)进行合成,从而生成摄像图像(以下称作“光场图像(light field image)”)。
光场图像,按照上述那样通过不仅经由现有技术的主透镜还经由微透镜阵列而入射的光所生成。即,光场图像除了具有现有技术的摄像图像中所包含的二维空间信息之外,还具有现有技术的摄像图像中未含有的信息,即表示从摄像元件来看是从哪个方向到来的光线的二维方向信息。
全光照相机在利用这样的二维方向信息进行光场图像的拍摄之后,采用该光场图像的数据能够重构在拍摄时距离前方任意距离的面的像。即、全光照相机,即使在规定距离下未对焦便对光场图像进行拍摄了的情况下,在该拍摄之后,通过采用该光场图像的数据便能够随意地制作如同在该规定距离下进行对焦后拍摄出的图像(以下称作“重构图像”)的数据。
具体而言,全光照相机将位于任意距离的面的一个点设定为关注点,计算来自该关注点的光经由主透镜以及微透镜阵列被分配到摄像元件内的哪个像素。
在此,例如,假设摄像元件的各像素与构成光场图像的各像素对应,则全光照相机,计算构成光场图像的各像素中、被分配来自该关注点的光的一个以上的像素的像素值的加法平均。该所计算出的值成为重构图像中的与关注点对应的像素的像素值。按照这样,重构图像的与关注点对应的像素被重构。
全光照相机将与位于任意距离的面的各点对应的各像素(构成重构图像的各像素)分别依次设定为关注点,通过重复上述一系列的处理,从而生成重构图像的数据(重构图像的各像素的像素值的集合)。
另外,在现有技术的全光照相机中,如图16所示,由一种微透镜构成微透镜阵列,并由这一种微透镜对应整个焦点范围。因此,根据与被拍摄体之间的距离以及微透镜的焦点距离的值的不同,该微透镜的模糊(微透镜模糊(micro lens blurring))变大,会在根据被拍摄的光场图像生成高精细的重构图像时成为妨碍。
另外,全光照相机的用户存在主要拍摄远景的倾向强的用户、将人物或动植物等放置于视角中央来拍摄风景的倾向强的用户、拍摄近景的倾向强的用户等具有各种个性的用户。然而,现有技术的全光照相机由于用一种微透镜构成微透镜阵列,因此在上述倾向强的情况下,微透镜模糊变大,有可能无法得到高精细的重构图像。
现有技术文献
专利文献1:日本特表2009-532993号公报
发明内容
本发明的第一方案是一种摄像装置,其特征在于,具备:摄像元件;主透镜,其将来自被拍摄体的光向所述摄像元件的方向进行会聚;以及微透镜阵列,其由被配置在所述摄像元件和所述主透镜之间、且使透过所述主透镜的光在所述摄像元件上成像的多个微透镜构成,所述微透镜阵列由焦点距离不同的多种类的微透镜构成,所述多种类中的至少一种所述微透镜具有与其他种类的所述微透镜不同的分布形态。
本发明的第二方案是一种摄像装置,其特征在于,具备:摄像单元,其具备摄像元件;主透镜单元,其被构成为可装卸于所述摄像单元,具备将来自被拍摄体的光向所述摄像元件的方向进行会聚的主透镜;和微透镜阵列单元,其具备由多个微透镜构成的微透镜阵列,该微透镜阵列被构成为可装卸于所述摄像单元与所述主透镜单元之间,并使透过所述主透镜的光在所述摄像元件上成像,所述摄像装置具备透镜位置调整部,该透镜位置调整部在所述微透镜阵列单元被安装于所述摄像单元和所述主透镜单元之间的情况下,使所述主透镜或者所述微透镜阵列移动至微透镜模糊的大小为最小的位置来进行调整。
附图说明
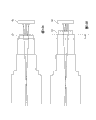
图1A及图1B是表示本实施方式所涉及的摄像装置的构成的图。
图2A及图2B是表示构成上述摄像装置的微透镜阵列的构成的图。
图3A及图3B是从光轴方向来对构成上述摄像装置的微透镜阵列单元进行了目识别的情况下的图。
图4A及图4B是表示上述摄像装置中的光学系统的构成的示意图。
图5是表示采用上述摄像装置中的微透镜阵列的情况下的子图像的示例的图。
图6是上述摄像装置中的控制方框图(其1)。
图7是说明在上述摄像装置中将来自关注点的光分配给摄像元件内的像素的样态的图。
图8是用于说明在上述摄像装置中所产生的微透镜模糊的大小的计算的图。
图9A及图9B是表示上述摄像装置中的主透镜的主平面的调整前后的状态的图。
图10A及图10B及图10C是表示在对上述摄像装置中的主透镜的光圈机构进行了调整的情况下,通过微透镜在摄像元件成像的子图像的图。
图11是用于说明上述摄像装置中的主透镜的最佳F值的计算的图。
图12是上述摄像装置中的控制方框图(其2)。
图13A及图13B是表示通过对上述摄像装置中的微透镜阵列的位置进行调整从而调整了模糊大小以及子图像大小的示例的图。
图14是说明上述摄像装置中的校准(calibration)的图。
图15是表示上述摄像装置中的重构处理的流程的流程图。
图16是表示构成现有技术的全光照相机的摄像部中的光学系统的构成例的示意图。
具体实施方式
以下,针对本发明的实施方式采用附图进行说明。
图1A及图1B是表示本实施方式涉及的摄像装置的构成的图。
图1A是表示在构成摄像装置的摄像单元未安装各透镜单元的状态的图。图1B是表示在构成摄像装置的摄像单元安装了各透镜单元的状态的图。
如图1A及图1B所示,摄像装置1由主透镜单元2、微透镜阵列单元3、以及摄像单元4构成。
主透镜单元2在内部具备包含主透镜21、和控制向主透镜21入射的光的量的光圈机构(省略图示)在内的光学系统。主透镜21由为了拍摄被拍摄体而对光进行会聚的透镜、例如对焦透镜、变焦透镜等构成。对焦透镜是用于使被拍摄体像在后述的摄像元件41的光接收面成像的透镜。变焦透镜是使焦点距离在一定的范围内随意改变的透镜。主透镜单元2具有可安装于微透镜阵列单元3及摄像单元4双方的装配件构造(mountingstructure)。
微透镜阵列单元3在安装了摄像单元4的一侧的端部具备微透镜阵列31。图2A及图2B是表示微透镜阵列31的构成的图。具体而言,图2A是微透镜阵列31的主视图,图2B是微透镜阵列31的剖面图。如图2A所示,微透镜阵列31由多种微透镜31A、31B、31C构成。这些多种微透镜31A、31B、31C各自焦点距离不同,使透射主透镜21的光在后述的摄像元件41上成像。
如图2A所示,这些多种类的微透镜31A、31B、31C按每个种类而设置个数不同。在图2A中,按微透镜31A、微透镜31B、微透镜31C的比例为2∶1∶1的方式被配置。即,微透镜阵列31具有:将微透镜31A与微透镜31B被交替配置的行、和微透镜31C与微透镜31A被交替配置的行,在列方向上反复配置而得到的矩阵构造。另外,在这些行中,微透镜31A被配置成在列方向上不相邻的配置(即交错状)。
另外,在本实施方式中,假设多种类的微透镜31A、31B、31C被均匀配置,但并不限于此。例如,针对多种类的微透镜,也可以使之在微透镜阵列31的各区域不均匀地配置。即,针对多种类的微透镜,也可以使之在微透镜阵列31的中心部和周边部按不同的分布进行配置。这种情况下,例如可举出如下示例:在微透镜阵列31的中心附近配置较多对应近距离的微透镜,在周边部配置较多对应远距离的微透镜。
另外,如图2A及图2B所示,在微透镜阵列31中使微透镜配置成同样地分布。在此,将相邻的微透镜中的各个微透镜的中心位置之间的距离称作微透镜间距LμLp。
返回图1A及图1B,在微透镜阵列单元3中,定义微透镜外部距离LμLo和微透镜内部距离LμLi。如图1B所示,微透镜外部距离LμLo是在摄像单元4安装了主透镜单元2及微透镜阵列单元3的情况下所露出的部分在光轴方向的距离。如图1B所示,微透镜内部距离LμLi是在摄像单元4安装了主透镜单元2及微透镜阵列单元3的情况下、微透镜阵列单元3与摄像单元4嵌合的部分在光轴方向的距离。
图3A及图3B是从光轴方向对微透镜阵列单元3进行目识别的情况下的图。具体而言,图3A是在图1A中的A面从主透镜单元2侧对微透镜阵列单元3进行目识别的情况下的图,图3B是在图1A中的B面从摄像单元4侧对微透镜阵列单元3进行目识别的情况下的图。
如图3A及图3B所示,在微透镜阵列单元3中在透镜镜筒32的下部设置电接点33。在摄像单元4安装了主透镜单元2及微透镜阵列单元3的情况下,该电接点33可与设置在主透镜单元2的电接点(省略图示)及设置在摄像单元4的电接点(省略图示)连接。这样,主透镜单元2、微透镜阵列单元3、以及摄像单元4便被电连接。
返回图1A及图1B,摄像单元4在与安装了主透镜单元2或者微透镜阵列单元3的开口部(装配件)对置的框体内的底部中央具备摄像元件41。摄像元件41由例如CMOS(Complementary Metal Oxide Semiconductor,互补金属氧化物半导体)型的光电转换元件等构成。从主透镜21或者各微透镜向光电转换元件入射被拍摄体像。因而,光电转换元件对被拍摄体像进行光电转换(拍摄)后在一定时间内对图像信号进行蓄积,并将所蓄积的图像信号作为模拟信号依次提供给AFE(省略图示)。
AFE对该模拟的图像信号执行A/D(Analog/Digital,模拟/数字)变换处理等各种信号处理。通过各种信号处理从而生成数字信号,并作为输出信号向后述的摄像控制部输出。
另外,将摄像单元4中与微透镜阵列单元3相连接的连接面和摄像元件41的表面之间的距离称作法兰后截距(flange back)LFB。
接着,针对使摄像单元4安装主透镜单元2及微透镜阵列单元3的情况和使摄像单元4直接安装主透镜单元2的情况之间的差异进行说明。
图4A及图4B是表示摄像装置1中的光学系统的构成的示意图。具体而言,图4A是表示仅将主透镜单元2安装于摄像单元4的情况下的光学系统的构成的示意图。图4B是表示将主透镜单元2及微透镜阵列单元3安装于摄像单元4的情况下的光学系统的构成的示意图。
如图4A及图4B所示,主透镜21对从被拍摄体照射出的向主透镜单元2的透镜镜筒入射的光进行会聚,使之在摄像元件41方向上成像。在仅将主透镜单元2安装于摄像单元4的情况下,通过主透镜21而会聚的光,如图4A所示在摄像元件41的表面成像为一个图像。
另一方面,在将主透镜单元2及微透镜阵列单元3安装于摄像单元4的情况下,通过主透镜21而会聚的光,如图4B所示,在微透镜阵列31的前方合焦,之后入射至微透镜阵列31。构成微透镜阵列31的多个微透镜31A、31B及31C对分别入射的光进行会聚,使之在摄像元件41上成像为子图像。由此,在摄像元件41中,生成由这些多个微透镜31A、31B及31C成像的子图像的集合体即光场图像。后述的摄像控制部46采用该光场图像生成重构图像。
在此,构成微透镜阵列31的多个微透镜31A、31B及31C各自的焦点距离不同。故而,在由某种微透镜会聚的光成像在摄像元件41的表面的情况下,其他种类的微透镜中被会聚的光将在摄像元件41的面的前方或者后方合焦。因而,由其他种类的微透镜在摄像元件41成像的子图像会产生模糊(微透镜模糊)。
图5是表示采用微透镜阵列31的情况下的子图像的示例的图。
图5表示按照与主透镜21从近到远的顺序依次配置透明的平面板P1、P2及P3的情况下的子图像I1、I2、I3及I4。
在此,在平面板P1、P2及P3分别以相同的颜色(例如黑色)显示字符“A”、“B”及“C”。
子图像I1及I3是由微透镜31A成像的图像。由于微透镜31A比微透镜31B焦点距离长,故而,在此,对焦在离主透镜21距离最远的平面板P3上显示的字符“C”。结果是子图像I1及I3中字符“C”比其他字符更鲜明地被显示。
子图像I2及I4是通过微透镜31B成像的图像。由于微透镜31B比微透镜31A焦点距离短,因此,在此,对焦在离主透镜21距离最近的平面板P1上显示的字符“A”。结果是子图像I2及I4中字符“A”比其他字符更鲜明地被显示。
另外,子图像I1~I4中各个字符被显示在不同的位置。这是因为各微透镜被配置在不同的位置,产生与对象物(在此为字符“A”、“B”、“C”)之间的视差。
接着,针对摄像装置1中的控制进行说明。图6是摄像装置1中的控制方框图。另外,图6中,针对图1A~图3B中已说明的各构成要素省略图示及说明。
主透镜单元2、微透镜阵列单元3、以及摄像单元4通过输入输出接口10而连接。输入输出接口10由上述的电接点33等构成,能够在主透镜单元2、微透镜阵列单元3及摄像单元4之间进行通信。
主透镜单元2具备:透镜存储部25、透镜控制部26、以及驱动部27。
透镜存储部25由ROM(Read Only Memory,只读存储器)、RAM(RandomAccess Memory,随机存取存储器)等构成,对用于控制主透镜单元2的各种程序、数据等进行存储。在透镜存储部25中预先存储主透镜21的焦点距离。
透镜控制部26由CPU(Central Processing Unit,中央处理器)等构成,依据在透镜存储部25中存储的程序、及从摄像单元4接收的各种命令来执行各种处理。具体而言,透镜控制部26经由输入输出接口10在从摄像单元4接收到控制信号的情况下,相应地将在透镜存储部25中存储的主透镜21的焦点距离发送给摄像单元4。另外,透镜控制部26在从摄像单元4接收到用于调整主透镜21的位置的信号的情况下,相应地控制驱动部27以调整主透镜21的位置。
驱动部27由对主透镜21的焦点、曝光、白平衡等设定参数进行调整的外围电路、光圈机构构成,根据透镜控制部26的控制进行主透镜21的位置调整、光圈机构的调整。
微透镜阵列单元3具备:阵列存储部35和阵列控制部36。
阵列存储部35由ROM、RAM等构成,对与微透镜阵列31、各微透镜有关的数据等进行存储。在阵列存储部35中预先存储微透镜外部距离LμLo、微透镜内部距离LμLi、每个种类的微透镜的焦点距离、以及微透镜间距LμLp。
阵列控制部36由CPU等构成,依据从摄像单元4接收的各种命令将在阵列存储部35中存储的各种数据发送给摄像单元4。具体而言,阵列控制部36经由输入输出接口10在从摄像单元4接收到控制信号的情况下,相应地将在阵列存储部35中存储的微透镜外部距离LμLo、微透镜内部距离LμLi、每个种类的微透镜的焦点距离、以及微透镜间距LμLp发送给摄像单元4。
摄像单元4具备:操作部44、摄像存储部45、摄像控制部46、以及显示部47。
操作部44由未图示的快门按钮等各种按钮构成,对与用户的指示操作相应的各种信息进行输入。
摄像存储部45由ROM、RAM等构成,对用于控制摄像单元4的各种程序、数据等进行存储。在摄像存储部45中预先存储法兰后截距LFB。另外,摄像存储部45对通过摄像装置1拍摄的光场图像、重构图像等各种图像的数据进行存储。
显示部47由监视器等构成,输出各种图像。
摄像控制部46由CPU等构成,对摄像装置1整体进行控制。摄像控制部46,根据在安装了微透镜阵列31的情况下拍摄的光场图像生成重构图像的数据。以下,将摄像控制部46所执行的生成重构图像的数据的处理称作重构处理。
具体而言,摄像控制部46,在操作部44中接受了指定主透镜21与重构对象的面(以下称作重构面。)之间的距离的操作的情况下,相应地将该重构面的一个像素设定为关注点。然后,摄像控制部46计算来自该关注点的光经由主透镜21及微透镜阵列31被分配给摄像元件41内的哪个像素。
图7是说明来自关注点的光被分配给摄像元件41内的像素的样态的图。
在图7中,将从透镜的中心位置沿光轴方向延伸的直线L与重构面Sr交叉的点作为中心位置,将位于从该中心位置向上方离开距离x的位置处的点作为关注点P。在此,针对从关注点P向构成微透镜31A的一个微透镜31As入射的光被分配给摄像元件41内的像素的样态进行说明。
对图7中的各距离进行以下定义:
a1:主透镜21与重构面Sr之间的距离
b1:主透镜成像距离(主透镜21与主透镜21的成像面Si之间的距离)
c1:主透镜21与微透镜阵列31之间的距离
a2:主透镜21的成像面Si与微透镜阵列31之间的距离
c2:微透镜阵列31与摄像元件41之间的距离
d:从直线L至微透镜31As的中心位置之间的距离
x’:主透镜21的焦点与直线L之间的距离
x”:在摄像元件41上被分配的光所到达的位置与直线L之间的距离
另外,将主透镜21的焦点距离作为LML-f。另外,在图7中画下划线的要素即距离x、a1、c1、c2、d是预先规定的要素。另外,上述各距离表示最短距离。
这种情况下,未预先规定的距离即b1、a2、x’、及x”采用透镜的公式由以下的式(1)~(4)表示。
b1=(a1-LML-f)/(a1×LML-f)…(1)
a2=c1-b1…(2)
x’=x×b1/a1…(3)
x”=(d-x’)×c2/a2+d…(4)
根据上述式(4),从关注点P向微透镜31As入射的光被分配给摄像元件41内的与距离x”对应的像素。
然后,摄像控制部46针对关注点P计算由各微透镜分配的像素的位置,通过计算这些位置的像素值的加法平均,从而决定关注点P的像素值。
然后,摄像控制部46通过将重构图像的各像素设定为关注点来执行上述运算,从而生成重构图像的数据。
另外,摄像控制部46在将主透镜单元2及微透镜阵列单元3安装于摄像单元4之后,在对主透镜21的主平面的位置进行调整的同时,针对从最短拍摄距离到无限远的被拍摄体距离计算各微透镜的微透镜模糊的大小,计算这些微透镜模糊的大小的平均值最小的主透镜21的主平面的位置(以下将该位置也称作最佳位置)。
另外,摄像控制部46也可以针对用户指定的任意的被拍摄体距离范围而计算主透镜21的最佳位置。以下,针对计算微透镜模糊的大小(以下也称作模糊大小。)的处理详细进行说明。
图8是用于说明微透镜模糊的大小的计算的图。
图8中,在每次计算微透镜模糊的大小时,对光学系统中的各距离进行以下定义。另外,在图8中,着眼于构成微透镜阵列31的各个微透镜中、特定的微透镜31s,来计算与该微透镜31s对应的微透镜模糊的大小。
LML-f:主透镜焦点距离
LML-O:主透镜被拍摄体距离(主透镜21与被拍摄体之间的距离)
LML+i:主透镜成像距离
LML-μL:主透镜21与微透镜31s之间的距离
LA:主透镜21的焦点位置与微透镜31s之间的距离
LμL-f:微透镜焦点距离
LμL-i:微透镜成像距离(微透镜31s与微透镜31s的焦点之间的距离)
LμL-IS:微透镜31s与摄像元件41之间的距离
LB:微透镜31s的焦点与摄像元件41之间的距离
LμL-B:微透镜31s的模糊大小
LμL-r:微透镜31s的有效直径
在此,LML-f、LμL-f、LμL-r是预先被规定的。另外,摄像控制部46在将微透镜阵列单元3安装于摄像单元4的时刻,采用法兰后截距LFB与微透镜内部距离LμLi根据式(5)计算微透镜31s与摄像元件41之间的距离LμL-IS,并将所计算出的值保存在摄像存储部45中。
LμL-IS=LFB-LμLi…(5)
然后,摄像控制部46在摄像时,在变更LML-O与LML-μL之间的距离的同时,计算微透镜31s的模糊大小LμL-B。
即,摄像控制部46采用LML-O和LML-f根据以下的式(6)计算主透镜成像距离LML-i。
LML-i=(LML-O-LML-f)/(LML-O×LML-f)…(6)
接着,摄像控制部46采用LML-i和LML-μL根据以下的式(7)计算主透镜21的焦点位置与微透镜31s之间的距离LA。
LA=LML-μL-LML-i…(7)
接着,摄像控制部46采用LμL-f和由式(7)求出的LA根据以下的式(8)计算微透镜成像距离LμL-i。
LμL-i=(LA-LμL-f)/LA×LμL-f…(8)
接着,摄像控制部46采用按照式(5)计算出的LμL-IS和按照式(8)计算出的LμLi,根据以下的式(9)计算微透镜31s的焦点与摄像元件41之间的距离LB。
LB=LμL-IS-LμL-i…(9)
接着,摄像控制部46采用预先规定的LμL-r、按照式(8)计算出的LμL -i、以及按照式(9)计算出的LB,根据以下的式(10)计算微透镜31s的模糊大小。
LμL-B=LμL-r×(LB/LμL-i)…(10)
摄像控制部46按照上述的运算对各LML-O下的所有微透镜的模糊大小Lμ L-B进行总计,并计算其加法平均。然后,对模糊大小的平均值最小的情况下的LML-O进行确定,将主透镜21调整到已确定的LML-O的位置。然后,摄像控制部46,使从主透镜21的对焦面为无限远时的主透镜21的主平面位置至所计算出的最佳位置为止的距离(主透镜调整距离)与用于识别微透镜阵列单元3的识别信息建立对应地存储在摄像存储部45中。这样一来,即使在微透镜阵列单元3从摄像单元4被拆下,之后再次被安装的情况下,也能够基于在摄像存储部45中存储的主透镜调整距离对主透镜21的位置进行调整。
图9A及图9B是表示主透镜21的主平面在调整前后的状态的图。具体而言,图9A是表示对摄像装置1的主透镜21的主平面进行调整前的状态的图,图9B是表示将摄像装置1的主透镜21的主平面调整规定距离LML-al之后的状态的图。另外,在图9A及图9B中,点线表示来自无限远的光线,虚线表示来自最短拍摄距离的光线。在此,着眼于微透镜31s的微透镜模糊进行说明。
图9A及图9B分别示出微透镜31s和摄像元件41的放大图。如这些放大图所示,能够确认调整后的模糊大小变得比调整前的模糊大小更小。通过进行该调整,从而例如从最短拍摄距离到无限远的被拍摄体距离都能良好地进行重构。
另外,摄像控制部46,基于在透镜存储部25中存储的主透镜21的焦点距离LML-f、在阵列存储部35中存储的微透镜外部距离LμLo、微透镜内部距离LμLi、各微透镜的焦点距离LμL-f及微透镜间距LμLp、在摄像存储部45中存储的法兰后截距LFB,计算主透镜21的最佳F值(FML),通过调整主透镜21的光圈机构从而将主透镜21的F值变更为最佳F值。在此,最佳F值是指通过各个微透镜在摄像元件41成像的子图像成为相互连接的大小的情况下的F值。
图10A~图10C是表示在对主透镜21的光圈机构进行了调整的情况下通过微透镜在摄像元件41上成像的子图像的图。如图10A所示,在通过主透镜21的光圈机构将光圈S打开的情况下,即,使F值变小的情况下,在摄像元件41上成像的子图像ISUB分别重叠在一起。另外,如图10C所示,在通过主透镜21的光圈机构将光圈S缩小的情况下,即,使F值变大的情况下,尽管在摄像元件41上成像的子图像ISUB各自不重叠,但子图像ISUB的面积变小。与此相对地,如图10B所示,在通过主透镜21的光圈机构将光圈S缩小为最佳的情况下,即,F值为最佳F值的情况下,在摄像元件41上成像的子图像ISUB成为相互连接的大小。
以下针对计算最佳F值的处理详细进行说明。
图11是用于说明最佳F值的计算的图。
另外,在图11中,将各要素与微透镜阵列31之间的距离,作为和上述的各要素与微透镜31s之间的距离同义来进行说明。
首先,摄像控制部46,采用法兰后截距LFB和微透镜内部距离LμLi,根据(11)式来计算微透镜阵列31与摄像元件41之间的距离LμL-IS。该值也可以采用在式(5)的计算中在摄像存储部45中存储的值。
LμL-IS=LFB-LμLi…(11)
接着,摄像控制部46,采用LML-f、LML-al、LμLo、和由式(11)计算出的LμL-IS,根据以下的式(12)计算主透镜21与微透镜阵列31之间的距离LML- μL。
LML-μL=LML-f+LML-al+LμLo-LμL-IS…(12)
另外,也可以预先使主透镜21与装配件之间的距离LML-m作为主透镜单元2的参数存储在透镜存储部25中,摄像控制部46采用LML-m根据以下的式(12)’计算主透镜21与微透镜阵列31之间的距离LML-μL。
LML-μL=LML-m+LμLo+LμLi…(12)’
接着,摄像控制部46,采用微透镜间距LμLp、由式(11)计算出的LμL -IS、以及由式(12)计算出的LML-μL,根据以下的式(13)计算主透镜21的有效直径LML-r。
LML-r=LμLp×LML-μL/LμL-IS…(13)
接着,摄像控制部46,采用LML-f和按式(13)计算出的LML-r,根据以下的式(14)计算主透镜21的最佳F值FML。
FML=LML-f/LML-r…(14)
接着,摄像控制部46,将根据式(14)计算出的最佳F值经由输入输出接口10发送至透镜控制部26。透镜控制部26基于所接收的最佳F值使驱动部27驱动光圈机构。
以上针对通过对主透镜21的主平面及F值进行调整,从而调整模糊大小及子图像大小的例子进行了说明,但摄像装置1也可以采用其他方法对模糊大小及子图像大小进行调整。
例如,如图12所示,在微透镜阵列单元3中设置用于使微透镜阵列31前后滑动的驱动部37,摄像控制部46经由输入输出接口10及阵列控制部36向驱动部37发送控制信号,从而使微透镜阵列31滑动以调整模糊大小及子图像大小。
图13A及图13B是表示通过对微透镜阵列31的位置进行调整从而对模糊大小及子图像大小进行调整的示例的图。即,图13A是表示对微透镜阵列31的位置进行调整之前的状态的图,图13B是表示对微透镜阵列31的位置进行调整之后的状态的图。在该例中,能够确认通过进行使微透镜阵列31的位置从调整前的状态向摄像元件41的方向移动的调整,从而由微透镜阵列31的各微透镜所会聚的光在摄像元件4的表面成像。
另外,在主透镜单元2安装有校准单元5的情况下,摄像控制部46进行校准。
图14是对摄像装置1中的校准进行说明的图。
图14所示的校准单元5是特定长度的筒状构件,在顶端设置有校准用的图片(image sheet)51和背景光(backlight)(未图示)。在该图片51的中心部显示点。在主透镜单元2的顶端安装了该校准单元5的状态下,摄像控制部46对图片51的光场图像与计算后的图像进行比较,测量其偏差量,进行校准。
即,摄像控制部46假定在图片51的点的位置存在点来进行计算,生成光场图像。接着,摄像控制部46,针对构成实际的光场图像的各子图像、和构成通过计算而生成的光场图像的各子图像,测量点的偏差量Δ。接着,摄像控制部46根据所测量的偏差量Δ来计算主透镜21的主平面位置的误差,使该误差的校正值存储在摄像单元4的摄像存储部45中。摄像控制部46,在针对使用进行该校准之后的主透镜21所拍摄的光场图像进行重构的情况下,基于在摄像存储部45中存储的校正值进行校正。
例如,根据上述式(5)至式(15)计算出的主透镜21与微透镜阵列31之间的距离等有可能包括计算误差、或者所使用的主透镜21所特有的光学式。因此,计算后的主透镜21的主平面的位置与实际的主透镜21的主平面的位置之间有可能产生误差。对此,摄像装置1通过采用摄像控制部46进行校准,从而通过对光场图像进行校正,由此能够使光场图像变得更高精细。
接着,针对摄像控制部46所执行的重构处理的流程进行说明。图15是表示重构处理的流程的流程图。
步骤S11中,摄像控制部46获取光场图像的数据。
步骤S12中,摄像控制部46,在通过操作部44接受了对主透镜21与重构面之间的距离进行指定的操作的情况下,相应地将位于主透镜21前方指定的距离的位置的面设定为重构面。
步骤S13中,摄像控制部46将构成重构面的一个像素设定为关注点P。另外,在将构成重构面的一个像素设定为关注点P的情况下,摄像控制部46将尚未被设定为关注点P的像素设定为关注点P。
步骤S14中,摄像控制部46计算从一个微透镜被分配了光的像素在摄像元件41上的位置。即,摄像控制部46,从构成微透镜阵列31的微透镜中选择一个微透镜,计算从在步骤S13中被设定的关注点P向被选择的微透镜入射的光被分配到摄像元件41的位置。然后,摄像控制部46将位于所计算出的位置的像素决定为被分配的像素。另外,在选择一个微透镜的情况下,摄像控制部46选择尚未被选择的微透镜。
在步骤S15中,摄像控制部46判定是否对被分配的像素全部进行了确定,即,判定是否针对所有微透镜进行了计算被分配的像素的位置的处理。摄像控制部46,在该判定为“是”的情况下,进入步骤S16的处理,在该判定为“否”的情况下,进入步骤S14的处理。
在步骤S16中,摄像控制部46针对被分配了来自关注点P的光的像素的像素值,计算加法平均。
在步骤S17中,摄像控制部46判定构成重构面的所有像素是否都设定成了关注点。摄像控制部46,在该判定为“是”的情况下,过渡至步骤S18的处理,在该判定为“否”的情况下,过渡至步骤S13的处理。
在步骤S18中,摄像控制部46对重构图像进行显示输出。
以上,针对本实施方式的摄像装置1的构成及处理进行了说明。
在本实施方式中,摄像装置1具备:摄像元件41;使来自被拍摄体的光向摄像元件41的方向进行会聚的主透镜21;以及由配置在摄像元件41与主透镜21之间、使透过主透镜21的光在摄像元件41上成像的多个微透镜构成的微透镜阵列31,微透镜阵列31由焦点距离不同的多种类的微透镜31A、31B及31C构成,多种类中的至少一种微透镜31A具有与其他种类的微透镜31B及31C不同的分布形态。
因此,在摄像装置1中,通过多种类的微透镜,从近距离至远距离都能够抑制微透镜模糊,在更广的距离范围内都能够得到高精细的重构图像。
另外,在本实施方式中,在微透镜阵列31中,将多种类的微透镜31A、31B及31C不均匀地配置。由此,例如,通过在微透镜阵列31的中心较多地配置与近距离对应的微透镜,在周边部较多地配置与远距离对应的微透镜,从而能够按照使中央部的被拍摄体醒目的方式进行拍摄。
另外,在本实施方式中,摄像装置1以可分离的方式构成具备主透镜21的主透镜单元2、具备微透镜阵列31的微透镜阵列单元3、以及具备摄像元件41的摄像单元4。
这样,通过对构成摄像装置1的每个部件进行单元化,使其相互可分离,从而能够提供一种更加符合用户目的的光场相机。即,通过将微透镜阵列单元3设置成可分离,从而用户能够根据该用户想要的图像的分辨率、进深的分辨率来选择微透镜的焦点距离、透镜间距。另外,摄像装置1的用户通过选择按每个微透镜来改变所通过的光量的微透镜阵列单元3,从而能够容易拍摄高动态范围(HDR:high dynamic range)图像。
这样,通过对构成摄像装置1的每个部件进行单元化,从而使主透镜单元2不是光场相机专用的透镜单元,而是可使用现有技术中的单反相机等中使用的透镜单元,从而用户容易导入摄像装置1。进而,通过将摄像单元4设计成摄像装置1与现有技术的相机并用,从而用户更容易导入摄像装置1。
另外,本发明并不限定于上述实施方式,在能够实现本发明的目的的范围内的变形、改良等都包含在本发明中。
例如,上述的实施方式中,虽然由三种微透镜31A、31B及31C构成微透镜阵列31,但并不特别限定于此。例如,构成微透镜阵列31的微透镜的种类也可以是两种或四种以上。
例如,在上述的实施方式中,在生成重构图像的数据时采用的光场图像的数据,采用由摄像装置1本身拍摄的图像数据,但并不特别限定于此。
即、摄像装置1也可以采用另外的摄像装置1或者现有技术的另外的全光照相机所拍摄的光场图像的数据来生成重构图像的数据。
换言之,本发明不仅适用于具有摄像功能的摄像装置1,还能够普遍适用于即使不具有摄像功能也具有常规的图像处理功能的电子设备。例如,本发明能够适用于个人电脑、打印机、电视接收机、录像机、导航装置、便携式电话、便携式游戏机等。
上述的一系列处理既能通过硬件来执行,也能通过软件来执行。
换言之,图6及图12的功能性构成只不过为例示,并不特别进行限定。即,只要在摄像装置1中具备能够将上述的一系列处理作为整体来执行的功能即可,为了实现该功能而使用什么样的功能模块并不特别限定于图6及图12的例子。
另外,一个功能模块既可以由单个硬件构成,也可以由单个软件构成,还可以由它们的组合构成。
在通过软件来执行一系列处理的情况下,构成该软件的程序从网络或记录介质安装到计算机等中。
计算机可以是组合到专用硬件中的计算机。此外,计算机可以是通过安装各种程序而能执行各种功能的计算机、例如通用的个人计算机。
含有这种程序的记录介质不仅可以由为了向用户提供程序而与装置主体单独地配置的图6及图12的摄像装置中设置的可移动介质(未图示)构成,也可由以预先组合到装置主体的状态而提供给用户的记录介质等构成。该可移动介质例如由磁盘(包括软盘)、光盘、或者光磁盘等构成。光盘例如由CD-ROM(Compact Disk-Read Only Memory,光盘只读存储器)、DVD(Digital Versatile Disk,数字通用光盘)等构成。光磁盘由MD(Mini-Disk,小型磁盘)等构成。此外,以预先组合到装置主体的状态而提供给用户的记录介质,例如由记录了程序的图6及图12的摄像存储部45中包含的硬盘等构成。
另外,在本说明书中,描述记录到记录介质中的程序的步骤当然包括沿着其顺序按时间序列被进行的处理,也包括未必一定按时间序列进行处理而并行或单独地执行的处理。
以上,对本发明的几个实施方式进行了说明,但是这些实施方式只不过是例示,并非限定本发明的技术范围。本发明可以采取其他的各种实施方式,而且在不脱离本发明的主旨的范围内能够进行省略或置换等各种变更。这些实施方式及其变形包含于本说明书等所记载的发明范围、主旨内,并且包含于权利要求书所记载的发明及其等同范围内。
Claims (7)
1.一种摄像装置,其特征在于,具备:
摄像元件;
主透镜,其将来自被拍摄体的光向所述摄像元件的方向进行会聚;以及
微透镜阵列,其由被配置在所述摄像元件和所述主透镜之间、且使透过所述主透镜的光在所述摄像元件上成像的多个微透镜构成,
所述微透镜阵列由焦点距离不同的多种类的微透镜构成,
所述多种类中的至少一种所述微透镜具有与其他种类的所述微透镜不同的分布形态。
2.根据权利要求1所述的摄像装置,其特征在于,
所述微透镜阵列中所述多种类的微透镜被不均匀地配置。
3.根据权利要求1所述的摄像装置,其特征在于,
以可分离的方式构成:具备所述主透镜的主透镜单元、具备所述微透镜阵列的微透镜阵列单元、和具备所述摄像元件的摄像单元。
4.根据权利要求1所述的摄像装置,其特征在于,
所述微透镜阵列中按每个所述种类的不同而微透镜的设置个数不同。
5.一种摄像装置,其特征在于,具备:
摄像单元,其具备摄像元件;
主透镜单元,其被构成为可装卸于所述摄像单元,具备将来自被拍摄体的光向所述摄像元件的方向进行会聚的主透镜;和
微透镜阵列单元,其具备由多个微透镜构成的微透镜阵列,该微透镜阵列被构成为可装卸于所述摄像单元与所述主透镜单元之间,并使透过所述主透镜的光在所述摄像元件上成像,
所述摄像装置具备透镜位置调整部,该透镜位置调整部在所述微透镜阵列单元被安装于所述摄像单元和所述主透镜单元之间的情况下,使所述主透镜或者所述微透镜阵列移动至微透镜模糊的大小为最小的位置来进行调整。
6.根据权利要求5所述的摄像装置,其特征在于,
所述透镜位置调整部,在用户指定的任意被拍摄体距离范围内,计算构成所述微透镜阵列的各微透镜的微透镜模糊的大小,使所述主透镜或者所述微透镜阵列移动至这些微透镜模糊的大小的平均值为最小的位置。
7.根据权利要求5所述的摄像装置,其特征在于,
所述主透镜单元具备光圈机构,
所述摄像装置还具备光圈机构调整部,该光圈机构调整部在所述微透镜阵列单元被安装在所述摄像单元与所述主透镜单元之间的情况下,对所述光圈机构进行调整,使得通过构成所述微透镜阵列的各个微透镜而在所述摄像元件上成像的子图像成为互相连接的程度的大小。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012064534A JP2013198016A (ja) | 2012-03-21 | 2012-03-21 | 撮像装置 |
| JP2012-064534 | 2012-03-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103327223A true CN103327223A (zh) | 2013-09-25 |
Family
ID=49195733
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2013100896310A Pending CN103327223A (zh) | 2012-03-21 | 2013-03-20 | 摄像装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20130250159A1 (zh) |
| JP (1) | JP2013198016A (zh) |
| CN (1) | CN103327223A (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104506762A (zh) * | 2014-12-25 | 2015-04-08 | 北京智谷睿拓技术服务有限公司 | 光场采集控制方法和装置、光场采集设备 |
| CN104980631A (zh) * | 2014-04-02 | 2015-10-14 | 佳能株式会社 | 生成焦点可改变的图像的摄像设备及其控制方法 |
| CN105472233A (zh) * | 2014-09-09 | 2016-04-06 | 北京智谷技术服务有限公司 | 光场采集控制方法和装置、光场采集设备 |
| CN106713707A (zh) * | 2016-11-18 | 2017-05-24 | 成都微晶景泰科技有限公司 | 透镜阵列成像方法及装置 |
| CN110024365A (zh) * | 2016-09-30 | 2019-07-16 | 株式会社尼康 | 摄像装置以及摄像系统 |
| US20210314509A1 (en) * | 2020-04-07 | 2021-10-07 | SK Hynix Inc. | Image sensing device |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104580877B (zh) * | 2013-10-29 | 2018-03-06 | 华为技术有限公司 | 图像获取的装置及方法 |
| JP6417809B2 (ja) * | 2014-03-05 | 2018-11-07 | ソニー株式会社 | 撮像装置 |
| CN105635530B (zh) * | 2014-11-03 | 2019-04-30 | 北京蚁视科技有限公司 | 光场成像系统 |
| US9800798B2 (en) * | 2015-02-13 | 2017-10-24 | Qualcomm Incorporated | Systems and methods for power optimization for imaging devices with dual cameras |
| JP2016177195A (ja) * | 2015-03-20 | 2016-10-06 | 株式会社リコー | マイクロレンズ基板及び撮像装置 |
| JP2017207720A (ja) * | 2016-05-20 | 2017-11-24 | 株式会社リコー | 撮像光学系及び撮像装置 |
| US20190137731A1 (en) * | 2017-11-03 | 2019-05-09 | Sony Corporation | Light field adapter for interchangeable lens cameras |
| US10573678B2 (en) * | 2018-05-09 | 2020-02-25 | Semiconductor Components Industries, Llc | Microlenses for high dynamic range imaging pixels |
| CN112689839A (zh) | 2018-09-17 | 2021-04-20 | 指纹卡有限公司 | 生物特征成像装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101065955A (zh) * | 2004-10-01 | 2007-10-31 | 利兰·斯坦福青年大学托管委员会 | 成像装置及其方法 |
| CN101500086A (zh) * | 2008-01-28 | 2009-08-05 | 索尼株式会社 | 图像拾取装置 |
| US20100141802A1 (en) * | 2008-12-08 | 2010-06-10 | Timothy Knight | Light Field Data Acquisition Devices, and Methods of Using and Manufacturing Same |
| CN101800854A (zh) * | 2009-02-05 | 2010-08-11 | 索尼公司 | 图像拾取装置 |
| WO2010121637A1 (en) * | 2009-04-22 | 2010-10-28 | Raytrix Gmbh | Digital imaging system, plenoptic optical device and image data processing method |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7880794B2 (en) * | 2005-03-24 | 2011-02-01 | Panasonic Corporation | Imaging device including a plurality of lens elements and a imaging sensor |
| US8243157B2 (en) * | 2006-02-07 | 2012-08-14 | The Board Of Trustees Of The Leland Stanford Junior University | Correction of optical aberrations |
| JP5040493B2 (ja) * | 2006-12-04 | 2012-10-03 | ソニー株式会社 | 撮像装置及び撮像方法 |
| JP4264569B2 (ja) * | 2007-01-09 | 2009-05-20 | ソニー株式会社 | 撮像装置 |
| JP2008312080A (ja) * | 2007-06-18 | 2008-12-25 | Sony Corp | 撮像装置及び撮像方法 |
| US8345144B1 (en) * | 2009-07-15 | 2013-01-01 | Adobe Systems Incorporated | Methods and apparatus for rich image capture with focused plenoptic cameras |
| US8400555B1 (en) * | 2009-12-01 | 2013-03-19 | Adobe Systems Incorporated | Focused plenoptic camera employing microlenses with different focal lengths |
| US8593564B2 (en) * | 2011-09-22 | 2013-11-26 | Apple Inc. | Digital camera including refocusable imaging mode adaptor |
-
2012
- 2012-03-21 JP JP2012064534A patent/JP2013198016A/ja active Pending
-
2013
- 2013-03-12 US US13/797,709 patent/US20130250159A1/en not_active Abandoned
- 2013-03-20 CN CN2013100896310A patent/CN103327223A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101065955A (zh) * | 2004-10-01 | 2007-10-31 | 利兰·斯坦福青年大学托管委员会 | 成像装置及其方法 |
| CN101500086A (zh) * | 2008-01-28 | 2009-08-05 | 索尼株式会社 | 图像拾取装置 |
| US20100141802A1 (en) * | 2008-12-08 | 2010-06-10 | Timothy Knight | Light Field Data Acquisition Devices, and Methods of Using and Manufacturing Same |
| CN101800854A (zh) * | 2009-02-05 | 2010-08-11 | 索尼公司 | 图像拾取装置 |
| WO2010121637A1 (en) * | 2009-04-22 | 2010-10-28 | Raytrix Gmbh | Digital imaging system, plenoptic optical device and image data processing method |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104980631A (zh) * | 2014-04-02 | 2015-10-14 | 佳能株式会社 | 生成焦点可改变的图像的摄像设备及其控制方法 |
| US10148861B2 (en) | 2014-04-02 | 2018-12-04 | Canon Kabushiki Kaisha | Image pickup apparatus generating focus changeable image, control method for image pickup apparatus, and storage medium |
| CN105472233A (zh) * | 2014-09-09 | 2016-04-06 | 北京智谷技术服务有限公司 | 光场采集控制方法和装置、光场采集设备 |
| CN105472233B (zh) * | 2014-09-09 | 2019-01-18 | 北京智谷技术服务有限公司 | 光场采集控制方法和装置、光场采集设备 |
| US10356349B2 (en) | 2014-09-09 | 2019-07-16 | Beijing Zhigu Tech Co., Ltd. | Light field capture control methods and apparatuses, light field capture devices |
| US10516877B2 (en) | 2014-12-25 | 2019-12-24 | Beijing Zhigu Rui Tuo Tech Co., Ltd. | Light field collection control methods and apparatuses, light field collection devices |
| CN104506762A (zh) * | 2014-12-25 | 2015-04-08 | 北京智谷睿拓技术服务有限公司 | 光场采集控制方法和装置、光场采集设备 |
| CN104506762B (zh) * | 2014-12-25 | 2018-09-04 | 北京智谷睿拓技术服务有限公司 | 光场采集控制方法和装置、光场采集设备 |
| CN110024365A (zh) * | 2016-09-30 | 2019-07-16 | 株式会社尼康 | 摄像装置以及摄像系统 |
| CN106713707A (zh) * | 2016-11-18 | 2017-05-24 | 成都微晶景泰科技有限公司 | 透镜阵列成像方法及装置 |
| CN106713707B (zh) * | 2016-11-18 | 2019-08-09 | 成都微晶景泰科技有限公司 | 透镜阵列成像方法及装置 |
| US20210314509A1 (en) * | 2020-04-07 | 2021-10-07 | SK Hynix Inc. | Image sensing device |
| US11678071B2 (en) * | 2020-04-07 | 2023-06-13 | SK Hynix Inc. | Image sensing device for acquiring a light field image |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013198016A (ja) | 2013-09-30 |
| US20130250159A1 (en) | 2013-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103327223A (zh) | 摄像装置 | |
| JP7001080B2 (ja) | 撮像装置 | |
| CN100504452C (zh) | 光学设备和光束分离器 | |
| JP4720508B2 (ja) | 撮像素子および撮像装置 | |
| CN102883093B (zh) | 摄像装置以及摄像元件 | |
| CN102547116B (zh) | 焦点检测设备及其控制方法 | |
| CN101854473B (zh) | 成像设备和焦点检测方法 | |
| CN101821657B (zh) | 摄像设备 | |
| US7863550B2 (en) | Focus detection device and focus detection method based upon center position of gravity information of a pair of light fluxes | |
| CN102487432B (zh) | 摄像设备 | |
| KR101131998B1 (ko) | 3차원 이미지 센서 및 그를 구비하는 입체영상 카메라 | |
| CN102713713B (zh) | 焦点调节设备和焦点调节方法 | |
| JP5361535B2 (ja) | 撮像装置 | |
| US20090135289A1 (en) | Image sensor and imaging apparatus | |
| CN101656835A (zh) | 图像拾取设备、显示器和图像处理设备 | |
| CN103782586A (zh) | 成像设备 | |
| CN106847092B (zh) | 一种显示面板、显示装置及其获取图像的方法 | |
| JP5966426B2 (ja) | 焦点検出装置 | |
| CN102833472A (zh) | 摄像设备及其控制方法 | |
| CN103685916A (zh) | 具有摄像装置的摄像设备及其控制方法 | |
| JP5625286B2 (ja) | 撮像装置 | |
| JP2013037296A (ja) | 撮像装置及び撮像素子 | |
| CN104508531A (zh) | 拍摄元件和拍摄装置 | |
| JP5866760B2 (ja) | 撮像装置 | |
| CN102986236B (zh) | 三维摄像装置、图像处理装置、图像处理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20130925 |