CN1031212C - 牙轮钻机的控制方法和微机自动控制系统 - Google Patents
牙轮钻机的控制方法和微机自动控制系统 Download PDFInfo
- Publication number
- CN1031212C CN1031212C CN 92106897 CN92106897A CN1031212C CN 1031212 C CN1031212 C CN 1031212C CN 92106897 CN92106897 CN 92106897 CN 92106897 A CN92106897 A CN 92106897A CN 1031212 C CN1031212 C CN 1031212C
- Authority
- CN
- China
- Prior art keywords
- drilling tool
- drilling
- axial compression
- rig
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Earth Drilling (AREA)
Abstract
牙轮钻机的控制方法和微机自动控制系统,涉及牙轮钻机钻孔过程和调平操作的控制技术,以及钻孔岩性的自动记录。本发明提供一种牙轮钻机钻进过程的控制方法和微机自动控制系统,能使钻机根据被钻凿岩层的变化优化匹配钻具的转速和轴压,使钻机处于优良的钻进状态。本发明的基础为牙轮钻进岩石可钻性指数,由它来表征牙轮钻进过程中岩石对钻头破碎作用的阻抗程度。该系统利用一种独特的控制模型,使钻具的转速和轴压与被钻凿岩层的性质、回转扭矩和钻机振动的超限量有关。
Description
本发明是一种牙轮钻机的控制方法和微机自动控制系统,它涉及牙轮钻机钻孔过程和调平操作的控制技术以及钻孔岩性的自动记录。能使钻机根据被钻凿岩层的变化而实现钻具转速和钻具轴压的优化匹配,使钻机处于优良的钻进状态。
牙轮钻机是目前国内外大中型露天矿山广为使用的先进高效钻孔设备,担负着露天矿山矿岩开采总量80%以上的钻孔量,在矿山生产中占有极其重要的地位。为了穿凿高质量炮孔,钻机需有一套完整的操作程序和调节过程。首先要把钻机在凹凸不平的工作面上调平,然后才能钻孔,开孔时必须采取低的转速和低轴压钻进,一旦钻头触到坚硬的岩层时,就要增加钻具的回转速度和轴压力,以获得较高的钻进速度,但施加最大轴压力和回转速度并不一定是钻机的最佳钻进状态。根据岩石破碎机理,当牙轮钻头的轴压力使牙轮齿与岩石接触所产生的接触压力等于或大于岩石的极限强度时,岩石便产生有效的容积破碎,破碎的岩渣颗粒大,再配以合适的回转速度和较强的排渣能力,就能达到较高的钻孔速度。由此可见,在钻进过程中,有一个根据岩层的变化实现优化匹配钻具转速和钻具轴压的问题。牙轮钻机钻进参数有钻具转速n、钻具轴压P、钻进速度V、回转挪矩M、钻机振动λ、排渣风量Q和排渣风压PF等,其中钻具转速n、钻具轴压P和排渣风量Q是基本钻进参数。目前钻机的排渣风量Q不可调,因此,钻进过程的基本调整参数是钻具转速n和钻具轴压P。以往有代表性的调节钻具转速和钻具轴压的方法有两种:(1)对效益判别准则N=(V/n)/(M/P)=PV/nM求极值法。其中PV代表钻进功率,nM代表回转功率。准则N的物理含义为钻进功率与回转功率之比,这样按效益判别准则寻求轴压和转速的最优匹配变为寻求单位回转功率下的最大钻进功率来匹配钻具转速和钻具轴压。从牙轮钻头破碎岩石机理来看,这一判别准则在理论上有极大值,但实际试验表明,由于现有的牙轮钻机的最大轴压受机械结构的限制,其值远小于按准则N寻求的最佳轴压,因此找不到最优轴压。而实际上找到的是钻机最大轴压和与之对应的转速,因此,该方法没有多大使用价值,因为钻机的最大轴压和与其对应的转速无需寻求便可给出。(2)最大钻进速度法。在回转扭矩M<Mmax,钻机振动λ<λmax等约束条件下,按照V=φ(n,P)→Vmax来调节钻具转速n和钻具轴压P。但牙轮钻机钻进实际情况表明,一般来说,对钻具施加最大轴压和最高转速可以获得最大的钻进速度,但不能获得高的钻头寿命和低的钻孔成本。
本发明的目的是提出一种牙轮钻机的控制方法和微机自动控制系统,包括牙轮钻机钻进过程的控制方法和控制装置。即提出了在牙轮钻进过程中连续检测岩性的牙轮钻进岩石可钻性指数,由它来反映被钻凿岩层的变化,使钻机能根据岩层的变化,优化匹配钻具转速和钻具轴压,达到优良的钻进状态,实现在较高钻进速度下达到高的钻头使用寿命和低的钻孔成本的目标。
本发明利用一种独特的控制模型,使牙轮钻机在钻进过程中,钻具转速和钻具轴压与被钻凿岩层的性质、回转扭矩及钻机振动的超限量有关。本发明的基础为牙轮钻进岩石可钻性指数DI,由它来表征牙轮钻进过程中岩石对钻头破碎作用的阻抗程度,其定义为钻具每转一转的钻深与钻具轴压之比,即: 式中,V/n为钻具在轴压P的作用下每转一转的钻深,n为钻具转速,P为钻具轴压,V为钻进速度。
岩石可钻性指数与钻头的尺寸、结构和齿的形状有关,对使用某一规格型号的钻头来说,岩石可钻性指数可以反映岩石可钻的难易程度,其值越大,表明岩石越易钻;其值越小,表明岩石越难钻。因此,钻机在钻进过程中,通过连续检测现时的钻具转速n、钻具轴压P和钻进速度V,就可以算出牙轮钻进岩石可钻性指数DI=V/Pn,由它来匹配钻具转速和钻具轴压。牙轮钻进岩石破碎机理表明,钻具所需转速与DI成正比,而钻具所需轴压与DI成反比,由此可得出钻具转速和钻具轴压给定信号n′g和P′g的关系式:
n′g=n0+K1DI 式中,n0为与钻机最低工作转速有关的可调常数,P0为与钻机最低工作轴压有关的可调常数;K1为牙轮钻进岩石可钻性指数DI对钻具转速影响的可调系数,K3为牙轮钻进岩石可钻性指数DI对钻具轴压影响的可调系数。
此外,利用钻机振动λ(包括垂直振动和水平振动)和回转扭矩M分别校正钻具转速n和钻具轴压P,当钻机振动和回转扭矩不超过预定的下限整定值λd和Md时,这两项校正项不起作用,只有当钻机振动或回转扭矩超过预定的下限整定值λd或Md时,才根据超限量的大小成比例地降低钻具转速或钻具轴压的给定信号,由此可得出当钻机振动和回转扭矩超限时钻具转速和钻具轴压给定信号ng和Pg的关系式:
ng=n'g-K2Δλ=n0+K1DI-K2Δλ 式中,K2为钻机振动超限量大小对钻具转速给定信号影响的可调系数;K4为回转扭矩超限量大小对钻具轴压给定信号影响的可调系数;Δλ为钻机振动超限量,ΔM为回转扭矩超限量。
Δλ=λ-λd
ΔM=M-Md式中,λd为钻机振动的下限整定值,Md为回转扭矩的下限整定值。
只要按照钻机和钻头的不同规格型号,合理地选择可调常数n0和P0以及可调系数K1、K2、K3和K4,就可以实现优化匹配钻具转速和钻具轴压。
另外,本发明设计了一种专用的牙轮钻机微机自动控制系统及其控制应用软件,由它实现上述控制方法,而且只要通过简单地修改可调常数n0和P0以及可调系数K1、K2、K3和K4,就可以使其适用于不同规格和型号的牙轮钻机和钻头。
本发明提供的微机自动控制系统包括钻进过程优化控制装置,回转扭矩超限处理装置,钻机振动超限处理装置,排渣风压超限处理装置,钻进过程程序控制装置,钻机平斜度检测显示和指导调平装置,钻孔岩层信息记录装置。这些装置按其功能分别由不同的钻进参数信号检测装置、运算装置、微机数据采集、计算、处理装置、轴压调节器、转速调节器、提升执行机构、注水执行机构、报警器和盒式磁带记录装置组成。
图1是牙轮钻机微机自动控制系统方块图;
图2是运算装置原理方块图;
图3是牙轮钻机控制用微机系统内部组成图;
图4是钻具轴压调节器一个实例的方块图;
图5是数字触发器原理方块图;
图6是钻具轴压调节器另一个实例的方块图;
图7是钻具转速调节器方块图;
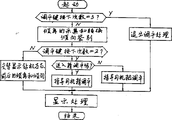
图8是钻进过程优化控制程序框图;
图9是牙轮钻机平斜度检测显示和指导调平的程序框图。
图1所示的牙轮钻机微机自动控制系统包括:钻进参数信号检测装置有钻具转速检测装置1、钻具轴压检测装置2、钻进速度检测装置3、回转扭矩检测装置5、钻机振动检测装置6、排渣风压检测装置7、钻机左右倾角检测装置4、钻机前后倾角检测装置9、钻机倾向检测装置10、钻进深度检测装置11;运算装置有根据钻具转速和钻具轴压信号产生钻具工作状态信号的运算装置4,根据钻具工作状态信号和钻进速度信号分别产生牙轮钻进岩石可钻性指数及其倒数的运算装置12和13;以及将检测装置5、6、8、9产生的回转扭矩,钻机综合振动、钻机左右倾角,钻机前后倾角的模拟量信号转换成数字量信号及将运算装置12、13分别产生的牙轮钻进岩石可钻性指数及其倒数的模拟量值转换成数字量值,并由此产生钻具转速和钻具轴压的给定信号的专用微机系统14;根据钻具轴压给定信号对钻具轴压进行比例积分调节的轴压调节器15;根据钻具转速给定信号对钻具转速进行调节控制的转速调节器16;提升执行机构17;注水执行机构18;报警器19及盒式磁带记录装置20。
牙轮钻机主要钻进参数的检测装置要求简单可靠,并适用于矿山恶劣的工作环境和条件。牙轮钻机的钻具由回转电机通过减速器带动旋转,因此,回转电机的转速就能反映钻具转速。对于YZ和KY两大系列牙轮钻机,回转电机都是它激直流电机,由于回转电机安装在回转小车上,且随时与回转小车一起沿着钻架上下移动,所以其转速难以用测速发电机同轴连接测量,为此,钻具转速通过检测回转电机的电枢电压进行近似测量。为了便于与强电主电路隔离,钻具转速检测装置1由改进后的直流电流互感器及其信号放大处理电路组成。
不同系列的钻机,其钻机轴压的施加方法各异,对于YZ系列的牙轮钻机,钻具轴压由液压加压马达通过主机构减速器、封闭链-齿条传动装置施加的,因此钻具轴压与液压马达两端油压成比例,所以,钻具轴压的检测可以变为对液压加压马达油压的检测。钻具轴压检测装置2由改进后的远传压力表及其放大电路组成,改进后的远传压力表接在液压加压马达的进油口管路上。对于KY系列牙轮钻机,钻具的轴压由电磁调速异步电动机通过主机构减速器、封闭链-齿条传动装置施加的,因此钻具的轴压与电磁调速异步电动机的扭矩成比例,所以,钻具轴压检测装置2变为检测加压电动机的电流有功分量的装置。
钻进速度就是钻具的推进速度,它与加压马达(或电机)及主机构相关轴的转速成比例。考虑到实际钻进时推进速度不连续,尤其是钻凿硬岩或矿石时更为突出,因此,从检测平均钻进速度的滤波要求来说,从加压马达(或电机)或高速轴上检测为好。考虑安装方便,采用脉冲型转速传感器并把它安装在加压轴上进行检测。当钻机钻进时,钻进速度传感器发出一系列频率与钻进速度成比例的脉冲,钻进速度检测装置3用以把这些脉冲信号变成电压信号,一方面供控制用,另一方面供钻进速度显示。
用于钻具转速和钻具轴压调节的牙轮钻进岩石可钻性指数DI及其倒数
是个很重要的参数,为了加快它的运算速度,提高控制系统的快速性,特采用硬件运算器4、12和13。首先,把钻具转速和钻具轴压检测装置实时测得的钻具转速n和钻具轴压P,通过运算器4的乘法运算求得钻具的工作状态信号SD=Pn,然后由钻具工作状态信号SD和钻进速度信号V分别通过运算器12和13的除法运算求得牙轮钻进岩石可钻性指数DI及其倒数
 即:
即: 运算器4、12和13都是多功能的乘除法器,它由对数运算放大器21、对数比运算放大器22、加法器23和反对数运算放大器24等部分组成,其原理方块图如图2所示,其输入-输出特性为: 当输入VY=n,VZ=P,VX=C1(常数,相应的一个固定电压),则V0=nP/C1=CnP,起着运算器4的乘法作用。当输入VY=V,VX=SD=Pn,而VZ=C2(常数,相应的一个固定电压),则V0=C2V/Pn,起着运算器12的除法作用。当输入VY=SD=Pn,VX=V,而VZ=C3(常数,相应的一个固定电压),则V0=C3Pn/V,起着运算器13的除法作用。
图3所示的牙轮钻机控制用的专用微机系统14由CPU板25、A/D转换器板26、并行接口和定时器板27、D/A转换及转速给定器板28、控制输入键盘29、4位光电数码管显示器30和盒式磁带记录器接口板31等组成。其中CPU板上的EPROM和RAM分别用来存放控制程序和反映钻孔岩性的牙轮钻进岩石可钻性指数;具有8路8位A/D输入的A/D转换器板26分别接收经各检测装置放大处理后的钻进参数信号,如回转扭矩M、钻机振动λ、牙轮钻进岩石可钻性指数V/Pn及其倒数Pn/V、钻机左右倾角α和钻机前后倾角β;并行接口和定时器板27分别和控制输入键盘29、显示器30、钻具轴压调节器15、提升执行机构17、注水执行机构18和报警器19连接;D/A转换及转速给定器板28用以把微机给出的钻具转速给定信号由数字量转换成模拟量,并通过转速给定器加到钻具转速调节器16的输入端;盒式磁带记录器接口板31用以把存储在CPU板RAM中的反映钻孔岩性的岩石可钻性指数转储到外部盒式磁带记录器20。另外,反映钻进深度H的钻进位移脉冲和提升位移脉冲分别加到CPU的两个外部中断申请端,排渣风压的超限信号和反映钻机平台倾斜方向的倾向信号都以开关量形式输入到CPU的输入口,微机系统14用于各钻进参数的采集、处理、计算和控制。
钻具轴压调节器15根据计算机给出的轴压给定信号对轴压进行比例积分调节,其方块图如图4所示。它由微机及其软件组成的数字调节器32、可控整流器33、电-液比例调压阀34和轴压中间反馈装置35等组成。钻具轴压调节器再通过液压加压系统36对钻具轴压进行调节。液压加压系统36由液压系统37、电-液方向阀38、液压加压马达39和加压机构40等组成。
数字调节器32包括比例积分调节器42、轴压数字给定器41和数字触发器43等三部分组成,轴压数字给定器41根据钻进岩层的变化给出优化的轴压给定信号Pg(t),与轴压中间反馈信号Pk(t)进行比较,得到差值信号E(t)=Pg(t)-Pk(t),然后由软件对其差值信号进行比例积分运算和调节。数字触发器43的方块图如图5所示,它由同步信号发生器44、定时移相器46、脉冲展宽器47、光电隔离器45和触发脉冲功率放大器48等环节组成。同步信号发生器44用来产生50Hz同步脉冲信号,其一作为计算机同步中断控制信号,由它同步整个微机控制系统的控制;其二作为轴压调节器功放级可控整流器的同步信号,以确保晶闸管阳极电压与触发脉冲同步。同步信号发生器44在50Hz交流过零处发出同步窄脉冲,该脉冲宽度要合适,否则会影响控制作用。同步窄脉冲经光电隔离器45隔离后加到CPU板的定时器T1的输入端申请中断,CPU在响应中断申请后,立即进入同步控制中断服务程序,把上个周期算得的移相定时值置入并行接口和定时器板27的定时移相器46内,并立即启动定时移相。接着对轴压中间反馈信号进行采样和对差值进行比例积分运算,最后算得的移相定时值存入内存,供下一个同步周期使用。当定时移相器定时到,由它输出一个脉冲,经单稳态脉冲展宽器47展宽后,通过光电隔离器45和功率放大器48,由脉冲变压器输出触发脉冲。可控整流器33是单相半控桥式整流电路,由它把轴压调节信号进行功率放大。为了保证线性度,把移相角控制在90°~180°之间,可控整流器的输出加到电-液比例调压阀的电磁铁线圈上。电-液比例调压阀34是一种能按输入信号对液压加压马达进油口压力进行比例调节的电-液元件。
对于KY系列牙轮钻机,由于其加压机构采用电磁调速异步电动机传动,所以,对上述轴压调节器要作一些改动,即把电-液比例调压阀34换成电磁转差离合器49,同时,把轴压中间反馈装置35换成电磁调速异步电动机的扭矩反馈装置50。另外,把液压加压系统36换成电磁调速异步电动机52的加压系统51。图6便是这种轴压调节器的方块图,其中换向装置53用以改变钻具的钻进方向,即变钻具钻进为提升。
图7是适用于YZ系列牙轮钻机的钻具转速调节器方块图,它包括微机转速给定器板28和钻机原回转调速装置54。钻具转速调节器根据计算机给出的优化转速信号对钻具转速进行调节。从图可见,三相交流电源经晶闸管三相全控桥式整流器55供给回转直流电机56,通过磁性移相触发电路57控制昌闸管的起通角,从而改变可控整流器55的输出电压,实现回转电机56的无级调速。为了提高回转机构特性的硬度,加有电枢电压负反馈58。为了限制钻具夹钻或其它原因引起的过电流,加有电流限制反馈59。计算机根据钻凿岩层变化给出的转速给定信号ng,通过D/A转换器60输出一个对应于ng的模拟电压,并经放大器61放大后去激励磁性移相触发电路57,进而使回转电机56给出一个与ng相应的转速。为了便于司机在非自动钻进时手动调节转速,保留原手动调速电位器62,特设一个手动/自动转换开关63进行切换。对于KY系列牙轮钻机,本发明的微机转速给定器板28只要加大放大器容量,提高其输出电流后照样与原钻机大功率磁放大器调速装置配套使用。
钻进过程优化控制装置由一组钻进参数检测传感器及其放大器,微机数据采集,处理和运算控制装置,轴压调节器和转速调节器等组成。具体来讲,包括钻具转速检测装置1,钻具轴压检测装置2,钻进速度检测装置3,回转扭矩检测装置5,钻机振动检测装置6,运算装置4、12和13,专用微机系统14,轴压调节器15和转速调节器16(参见图1)。在钻机钻进过程优化控制时,微机系统14对牙轮钻进岩石可钻性指数DI及其倒数
 、钻机振动λ和回转扭矩M进行分时采集、数字滤波,并算出优化的钻具转速和钻具轴压的给定信号。在控制周期中插入一个等待时间,作为调节后的参数稳定时间,其余为上述参数的连续采样时间。简要的钻进过程优化控制程序如图8所示。从图8中可见,当钻机振动λ大于预定的下限整定值λd时,在优化控制程序中引入一个振动校正项,与振动超限量Δλ成比例地降低钻具转速给定信号。对于由一般振动诱发的共振,只要通过降低钻具转速来破坏其共振条件就可以消除。若1s内不能达到限振动要求,则表明该区段是难钻的多振区段,计算机转入振动超限处理程序。同样,当回转扭矩M超过预定的下限整定值Md、且小于预定的中限整定值Mm时,则在优化控制程序中引入一个回转扭矩校正项,与回转扭矩超限量ΔM成比例地降低钻具轴压给定信号。当回转扭矩M超过Mm时,则计算机进入回转扭矩超限处理程序。计算机最终发出的转速和轴压的优化给定信号分别经钻具转速调节器和钻具轴压调节器去调节钻具的转速和轴压。
、钻机振动λ和回转扭矩M进行分时采集、数字滤波,并算出优化的钻具转速和钻具轴压的给定信号。在控制周期中插入一个等待时间,作为调节后的参数稳定时间,其余为上述参数的连续采样时间。简要的钻进过程优化控制程序如图8所示。从图8中可见,当钻机振动λ大于预定的下限整定值λd时,在优化控制程序中引入一个振动校正项,与振动超限量Δλ成比例地降低钻具转速给定信号。对于由一般振动诱发的共振,只要通过降低钻具转速来破坏其共振条件就可以消除。若1s内不能达到限振动要求,则表明该区段是难钻的多振区段,计算机转入振动超限处理程序。同样,当回转扭矩M超过预定的下限整定值Md、且小于预定的中限整定值Mm时,则在优化控制程序中引入一个回转扭矩校正项,与回转扭矩超限量ΔM成比例地降低钻具轴压给定信号。当回转扭矩M超过Mm时,则计算机进入回转扭矩超限处理程序。计算机最终发出的转速和轴压的优化给定信号分别经钻具转速调节器和钻具轴压调节器去调节钻具的转速和轴压。
钻具钻进速度过快,孔底排渣不赢,以及孔壁堆邦或蹩渣等原因都会造成回转扭矩过大,这往往表现为回转电机电流过载,有时甚至严重夹钻而使电机堵转。为了避免损坏回转电机,提高钻机和钻具的使用寿命,迂到上述回转扭矩超限情况时,必须通过除钻具轴压来减慢钻进速度进行限制处理,有时蹩渣严重,光靠降低轴压来减慢钻进速度无济于事,这时需要提钻处理,直到回转扭矩恢复正常为止。回转扭矩超限处理装置由回转扭矩检测装置5,专用微机系统14,轴压调节器15,提升执行机构17,注水执行机构18和报警器19组成(参见图1)。回转扭矩信号经检测装置5放大处理后,加到微机系统A/D转换器板26的输入端,CPU定时对回转扭矩巡检一次,一旦回转扭矩超过预定下限整定值Md而又小于预定的中限整定值Mm时,则计算机在优化控制程序中引入一个回转扭矩校正项,与回转扭矩的超限量ΔM成比例地降低钻具轴压。当回转扭矩超过Mm时,则计算机进入回转扭矩超限处理程序,通过轴压调节器15大幅度降低钻具轴压,同时,通过注水执行机构18关断除尘用的注水。一般情况下,通过采取上述限制措施后,回转扭矩会恢复到正常值。但有时蹩渣严重,当回转扭矩大于预定上限整定值Mu,且持续时间大于0.5s后,计算机立即发出提钻指令,通过提升执行机构17中的电-液方向阀38改变液压加压马达39的油流方向,使钻具以最大提升力提升,同时由报警器19发出报警信号。另外,计算机记录提升高度,直到回转扭矩恢复到正常值为止,然后快速落钻,落到原钻进深度后送原轴压,并开通注水,进入正常优化调节程序。
钻机在钻孔过程中,经常会遇到节理发达的岩层,由此引起钻机产生较大振动。有时这些振动频率恰好与钻机本身的固有频率相接近,从而诱发起共振,表现为钻杆的强烈跳动。有时遇到孔底局部岩层与周围岩层抗压强度差异很大或者有的区段岩层有裂隙,也会引起钻机的强烈振动。这些过大振动都会影响钻头、钻杆和回转机构以及其它零部件的使用寿命,因此,必须对钻机的过大振动进行及时的超限处理。钻机振动超限处理装置由钻机振动检测装置6,专用微机系统14和钻具转速调节器16组成(参见图1)。钻机的垂直振动和水平振动经钻机振动检测装置6检测得到一个钻机振动信号,然后加到微机系统的A/D转换器板26的输入端,计算机定时对钻机振动巡检一次,当振动信号大于预定的下限整定值λd时,计算机在优化控制程序中引入一个振动校正项,与振动超限量Δλ成比例地降低钻具转速。若1s内不能达到限振要求,则表明该区段是难钻的多振区段,计算机转入振动超限处理程序。在该程序中设置中限和上限两个振动强度超限级别,计算机根据振动超限级别将钻具转速降为相应的转速,当过大振动消除后,逐级恢复到原转速。
钻进速度过快致使排渣不赢,或者注水多过,都可能使空压机的排渣风压不同程度地升高,有时蹩渣严重致使排渣风压达到不允许的程度,因此,必须采取措施降低钻具轴压,关断注水,或者甚至提钻,将排渣风压限制在预定的允许范围内。排渣风压超限处理装置由风压检测装置7,专用微机系统14,钻具轴压调节器15,提升执行机构17,注水执行机构18和报警器19组成。其中排渣风压采用改进后的远传压力表进行检测,排渣风压的超限信号以开关量形式输入到CPU主板25的输入口。当风压超过预定限制值时,开关量输出为高电平,反之为低电平。计算机定时巡检一次,当CPU检测到风压信号为高电平时,立即进入排渣风压超限处理,通过轴压调节器15降低钻具轴压,进而减慢钻进速度,同时通过注水执行机构18关断注水。另外,起动内部定时器计时,若在5s内没能使风压恢复正常,则立即指令提升执行机构17提升钻具,同时由报警器19发出报警信号。另外,计算机记录提升高度,直到风压恢复正常为止。然后快速落钻,直到钻头达到原来的钻进深度时送原轴压,并开通注水,进入正常优化调节程序。
上述回转扭矩、钻机振动和排渣风压的超限处理是由各自的超限处理程序单独进行的,但偶尔也发生多超限情况,这时需要进入多超限处理程序。多超限处理时,回转扭矩的优先处理级别最高,而振动和风压为同级。
牙轮钻机在钻孔过程中,要准确地计量钻进深度,一方面保证钻孔深度达到预定的要求,既不超深,又不欠深;另一方面按钻进深度实现钻孔过程的程序控制,实现自动开孔,正常调节钻进,关断除尘用的注水和达到预定孔深时提钻报警等一系列顺序操作,无需钻机司机参与。钻进过程程序控制装置由钻进深度检测装置11,专用微机系统14,轴压调节器15,转速调节器16,提升执行机构17,注水执行机构18和报警器19组成。其中钻进深度检测装置包括钻头位移传感器和位移方向鉴别电路两个部分。钻头位移传感器的转轴通过万向联轴器和钻机提升轴相联,当钻机提升轴带动钻具向下钻进或向上提升时,钻头位移传感器的转轴跟着旋转,将角位移变为电脉冲,其输出的脉冲个数与钻头位移量成正比。由钻头位移方向鉴别电路输出的钻进位移脉冲或提升位移脉冲,分别加到CPU板的两个外部中断申请端,这样CPU每收到钻进位移脉冲就进入钻进累加中断服务程序,对钻进位移脉冲进行累加计数和深度换算处理。反之,每收到提升位移脉冲就进入提升累减中断服务程序,对提升位移脉冲进行累减计数和深度换算处理。
为了解决由钻机振动引起钻头位移传感器误发位移脉冲所造成的钻进深度测量不准,本发明在原钻头位移传感器上增设了一个每转一圈发一个脉冲信号的装置,计算机根据这一信号由软件进行位移方向鉴别和位移脉冲累计量的修正。
钻孔过程程序控制由微机根据钻进深度进行。开始钻孔时,微机通过钻具轴压调节器15和钻具转速调节器16,以及注水执行机构18,给出较低的开孔轴压和转速以及除尘用注水,以便在松散的表土或破碎的台阶面上开出一个直孔。一旦达到开孔深度,钻头触到坚硬岩石时,计算机就进入钻孔过程优化控制程序,自动增加钻具轴压和钻具转速,进行正常优化调节钻进。当钻进深度离总孔深还有0.5m时,计算机通过注水执行机构18关断除尘用的注水,继续干式钻进,因为这时钻孔内壁还是湿的,所以干式钻进时粉尘并不大,而钻完所剩的0.5m时钻孔将是干的,这样便于装药,有利于爆破。当钻孔达到预定深度时,计算机发出提钻指令,通过提升执行机构17提升钻具,同时报警器发出报警,告诉司机钻孔已经结束。开孔深度、关断注水深度和总孔深度事先由司机根据钻孔现场具体设定。
为了使钻机在露天矿山坎坷不平的台阶面上钻凿一个垂直炮孔,需将钻机在凹凸不平的工作面上调平,确保钻杆与水平面垂直,否则炮孔偏斜,孔底间距严重偏离孔口设计的孔网参数,进而影响爆破效果,出现大块和根底。钻机平斜度检测显示和指导调平装置由钻机左右倾角检测装置8,钻机前后倾角检测装置9,钻机倾向检测装置10,专用微机系统14和调平指示灯组成。反映钻机平台左右、前后轴线的倾角信号输入到A/D转换器板26,而倾向信号Dt以开关量形式输入到CPU板25的输入口。微机根据控制输入键盘中调平键来检测显示钻机平斜度和指导调平操作,其程序框图如图9所示。钻机平斜度检测显示和指导调平程序由调平键调用。当第一次按下调平键时,计算机交替检测和显示钻机左右、前后两轴线的倾角和倾向,使司机在调平操作前做到心中有数。第二次按下调平键后,计算机进入指导司机粗调平,经检测、比较和判断,首先对倾角较大的那个轴线进行显示和指导调平。在显示器下方设有4个与4个液压调平千斤顶相对应的指示灯,计算机经分析判断确定应该顶起哪对或哪个千斤顶时,就会点亮与此对应的指示灯,以指导司机调平。当在调的那个轴线的倾角小于1°时,计算机转入到另一轴线进行显示和指导调平,直到倾角小于1°时为止。然后程序进入指导司机精调平,交替显示钻机左右、前后两轴线的倾角和倾向,同时,计算机继续通过指示灯指导调平,直到左右、前后后两轴线的倾角小于0.2°时为止。最后指导司机检测4个调平千斤顶是否全部落地,待未落地的千斤顶落地后即完成调平操作,再次按下调平键就退出调平操作,显示器返回钻进深度显示。当4个指导调平指示灯换成4个电-液方向阀,并接在对应液压调平千斤顶的管路上就可以实现钻机自动调平。
钻机的钻孔过程实际上是对矿山矿岩状况进行生产勘探的过程,岩层的可钻性、可爆性和可挖性及其相关信息都可以通过钻孔过程直接获得,所以,钻机的钻孔过程是露天矿最重要的信息源之一。本发明提供了在钻进过程中按钻孔深度自动记录岩石可钻性指数的装置,即钻孔岩层信息记录装置,它由钻具转速检测装置1,钻具轴压检测装置2,钻进速度检测装置3,钻进深度检测装置11,运算器4及12,专用微机系统14和盒式磁带记录装置20组成。反映岩性的牙轮钻进岩石可钻性指数在实时测得的钻具转速n、钻具轴压P和钻进速度V的基础上,经过运算器4和12求得,计算机进行定时采集、数字滤波后,每隔钻进深度0.1m,将其平均,并作为该深度的平均岩石可钻性指数,存放在CPU板25的规定RAM区内,按钻孔编号及钻孔深度依次存放,当一个班钻孔结束后,钻机司机把盒式磁带记录装置插入接口板31的串行接口,通过控制输入键盘中岩性记录键将其转贮到盒式磁带上,同时,通过密码键将原信息清掉,为下个班从头开始存放岩层信息作好准备。装有每个钻孔不同深度下岩石可钻性指数的盒式磁带通过矿山管理计算机的专用软件进行转贮和分析处理。
本发明提供的控制方法和微机自动控制系统主要用于矿山牙轮钻机,对使用牙轮钻头钻进的石油钻机、天井钻机也都适用。该系统具有六大功能:(1)钻机在钻孔过程中能根据被钻凿岩层的变化优化匹配钻具的转速和轴压,使钻机处于优良的钻进状态;(2)回转扭矩过载,钻机振动过大和排渣风压过高的超限处理;(3)钻孔过程按钻进深度实现自动开孔、正常调节钻进、关断除尘注水和达到预定总孔深时提钻报警等程序控制;(4)钻孔过程中钻进深度和钻进速度的连续监测;(5)钻机平斜度的检测显示和指导司机调平,当钻机配备电-液调平执行装置时可实现自动调平;(6)把反映钻孔岩层性质的岩石可钻性指数按孔号和每个钻孔深度记录在盒式磁带记录装置内,以供输入矿山计算机系统作控制装药和分析管理用。这些功能完全满足牙轮钻机钻凿炮孔的工艺要求,利用该微机自动控制系统可提高钻头使用寿命30%以上,并能提高钻机的钻孔效率,该系统技术先进,功能齐全,自动化程度高。在钻进过程中能按钻孔深度自动记录岩层的可钻性指数,根据岩石可钻性和岩石可爆性之间的相关性,可用来控制炮孔的分段装药,提高爆破效果和降低爆破费用。可大大减轻钻机司机的劳动强度。
Claims (11)
1、一种使牙轮钻机在钻进过程中能根据被钻凿岩层的变化而实现钻具转速和钻具轴压优化匹配的控制方法,其方法的特征在于:
(a)提出在钻机钻进过程中用牙轮钻进岩石可钻性指数DI连续检测被钻凿岩层的岩性,DI表征牙轮钻进过程中岩石对钻具破岩作用的阻抗程度,其定义为钻具每转一转的钻深与钻具轴压之比,即: 这里,V为钻进速度,n为钻具转速,P为钻具轴压,V/n为钻具每转一转的钻深,利用牙轮钻进岩石可钻性指数DI控制钻具转速n和钻具轴压P;
(b)检测钻具加压机构的推进速度,加压油马达的油压及回转直流电机的电枢电压和电流,并产生相应的钻进速度V、钻具轴压P、钻具转速n和回转扭矩M的信号;
(c)检测钻机的垂直振动和水平振动,并产生钻机振动λ的信号;
(d)根据钻具转速n和钻具轴压P,产生钻具工作状态SD的信号;
(e)根据钻具工作状态SD信号和钻进速度V信号,产生牙轮钻进岩石可钻性指数DI及其倒数

(f)利用牙轮钻进岩石可钻性指数DI来优化匹配钻具转速和钻具轴压时,钻具所需的转速与DI成正比,而钻具所需的轴压与DI成反比,由此产生钻具转速和钻具轴压的给定信号,并将其分别加到钻具的转速调节器和轴压调节器;
(g)利用钻机振动λ和回转扭矩M分别校正钻具转速和钻具轴压,当钻机振动λ或回转扭矩M超过预定的限制值时,根据其超限量的大小成比例地降低钻具转速或钻具轴压的给定信号;
(h)根据牙轮钻进岩石可钻性指数DI和钻进深度H,按钻凿炮孔的深度存贮和记录炮孔的岩层信息。
2、根据权利要求1的控制方法,其特征在于,(b)和(c)进一步定义为:
(b1)产生钻进速度V、钻具轴压P、钻具转速n和回转扭矩M的模拟量信号;
(c1)产生钻机振动λ的模拟量信号。
3、根据权利要求1的控制方法,其特征在于,(d)进一步定义为:(d1)根据下列关系式,计算钻具工作状态SD信号:
SD=Pn这里,P为钻具轴压,n为钻具转速。
4、根据权利要求1的控制方法,其特征在于,(e)进一步定义为:(e1)根据下列关系式,分别计算牙轮钻进岩石可钻性指数DI及其倒数
这里,V为钻进速度,P为钻具轴压,n为钻具转速,SD为钻具工作状态。
5、根据权利要求2和4的控制方法,其特征在于,(b)、(c)和(e)进一步定义为:
(b2)将回转扭矩M的模拟量信号转换成数字量信号;
(c2)将钻机振动λ的模拟量信号转换成数字量信号;(e2)将模拟运算所得的DI和
 由模拟量转换成数字量。
由模拟量转换成数字量。
6、根据权利要求1的控制方法,其特征在于,(f)进一步定义为:
(f1)当钻机振动和回转扭矩不超过预定的限制值时,钻具转速和钻具轴压的给定信号n′g和P′g根据下列关系式计算:
n′g=n0+K1DI 这里,n0和P0分别为与钻机的最低工作转速和最低的工作轴压有关的可调常数,视钻机的规格型号不同可调,K1和K3分别为牙轮钻进岩石可钻性指数DI对钻具转速和钻具轴压影响的可调系数,视牙轮钻头的规格型号不同可调。
7、根据权利要求1的控制方法,其特征在于,(g)进一步定义为:
(g1)当钻机振动和回转扭矩超过预定的限制值时,钻具转速和钻具轴压的给定信号ng和Pg根据下列关系式计算:
ng=n′g-K2Δλ
Pg=P′g-K4ΔM这里,n′g和P′g分别为当钻机振动和回转矩不超过预定的限制值时的钻具转速和钻具轴压的给定信号;K2和K4分别为钻机振动和回转扭矩超限量大小对钻具转速和钻具轴压给定信号影响的可调系数;Δλ和ΔM分别为钻机振动和回转扭矩的超限量。
8、根据权利要求7的控制方法,其特征在于,(g)进一步定义为:
(g2)钻机振动和回转扭矩的超限量Δλ和ΔM,根据下列关系式计算:Δλ=λ-λdΔM=M-Md这里,λ和M分别为钻机振动和回转扭矩;λd和Md分别为钻机振动和回转扭矩的下限整定值。
9、一种包括钻进过程优化控制装置、回转扭矩超限处理装置、钻机振动超限处理装置、排渣风压超限处理装置、钻进过程程序控制装置、钻机平斜度检测显示和指导调平装置、钻孔岩层信息记录装置的牙轮钻机微机自动控制系统,其特征在于:
(a)钻进过程优化控制装置具有:一组钻进参数检测装置、三个运算装置、一个根据权利要求1的控制方法优化匹配钻具转速和轴压的专用微机系统、一个钻具轴压调节器和一个钻具转速调节器;
(b)回转扭矩超限处理装置由回转扭矩检测装置(5)、专用微机系统(14)、钻具轴压调节器(15)、控制钻具提升的提升执行机构(17)、控制钻机除尘的注水执行机构(18)、报警器(19)组成;
(c)钻机振动超限处理装置由钻机振动检测装置(6)、专用微机系统(14)、钻具转速调节器(16)组成;
(d)排渣风压超限处理装置由风压检测装置(7)、专用微机系统(14)、钻具轴压调节器(15)、控制钻具提升的提升执行机构(17)、控制钻机除尘的注水执行机构(18)、报警器(19)组成;
(e)钻进过程程序控制装置由钻进深度检测装置(11)、专用微机系统(14)、钻具轴压调节器(15)、钻具转速调节器(16)、控制钻具提升的提升执行机构(17)、控制钻机除尘的注水执行机构(18)、报警器(19)组成;
(f)钻机平斜度检测显示和指导调平装置由钻机左右倾角检测装置(8)、钻机前后倾角检测装置(9)、钻机倾向检测装置(10)、专用微机系统(14)、调平指示灯组成,其中倾角检测装置中的倾角传感器采用通用的线性旋转变压器。调平程序包括粗调平和精调平两部分;
(g)钻孔岩层信息记录装置由钻具转速检测装置(1)、钻具轴压检测装置(2)、钻进速度检测装置(3)、钻进深度检测装置(11)、运算装置(4)及(12)、专用微机系统(14)、盒式磁带记录装置(20)组成。
10、根据权利要求9所述的牙轮钻机微机自动控制系统,特征在于其中的(a)所述的钻进过程优化控制装置进一步包括:
(a1)一组钻进参数的检测装置有:钻具转速检测装置(1)、钻具轴压检测装置(2)、钻进速度检测装置(3)、回转扭矩检测装置(5)和钻机振动检测装置(6);
(a2)三个运算装置是:根据钻具转速和钻具轴压信号产生钻具工作状态信号的运算装置(4)、根据钻具工作状态信号和钻进速度信号,分别产生牙轮钻进岩石可钻性指数及其倒数的运算装置(12)和(13);
(a3)专用微机系统(14)由CPU板(25)、A/D转换器板(26)、并行接口和定时器板(27)、D/A转换及转速给定器板(28)、控制输入键盘(29)、4位光电数码管显示器(30)和盒式磁带记录器接口板(31)组成,它通过根据权利要求1的控制方法编制的控制软件,把由运算装置(12)和(13)分别产生的牙轮钻进岩石可钻性指数及其倒数的模拟量值、回转扭矩检测装置(5)产生的回转扭矩模拟量信号和钻机振动检测装置(6)产生的钻机振动的模拟量信号转换成数字量,进行数字滤波和数据处理,并由此产生优化匹配的钻具转速和钻具轴压的给定信号;
(a4)钻具轴压调节器(15)由数字调节器(32)、可控整流器(33)、电-液比例调压阀(34)、轴压中间反馈装置(35)组成。
11、根据权利要求9所述的牙轮钻机微机自动控制系统,特征在于其中的(e)所述的钻进过程程序控制装置为解决由于钻机振动引起钻头位移传感器误发位移脉冲所造成的钻进深度测量不准,而在原钻头位移传感器上增设一个每转一圈发一个脉冲信号的装置,由专用微机系统(14)根据这一脉冲信号进行位移脉冲量的修正。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 92106897 CN1031212C (zh) | 1992-04-23 | 1992-04-23 | 牙轮钻机的控制方法和微机自动控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 92106897 CN1031212C (zh) | 1992-04-23 | 1992-04-23 | 牙轮钻机的控制方法和微机自动控制系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1077774A CN1077774A (zh) | 1993-10-27 |
| CN1031212C true CN1031212C (zh) | 1996-03-06 |
Family
ID=4942525
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 92106897 Expired - Fee Related CN1031212C (zh) | 1992-04-23 | 1992-04-23 | 牙轮钻机的控制方法和微机自动控制系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN1031212C (zh) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1049038C (zh) * | 1994-08-01 | 2000-02-02 | 新疆维吾尔自治区地质矿产局第二区域地质调查大队 | 钻探智能监控仪 |
| CN101899969B (zh) * | 2010-03-24 | 2013-04-17 | 苏州锐石能源开发技术有限公司 | 实时实地钻井全参数优化方法 |
| CN103270243B (zh) * | 2010-12-22 | 2016-07-06 | 国际壳牌研究有限公司 | 控制钻井系统中的振动 |
| CN103850672A (zh) * | 2014-03-20 | 2014-06-11 | 湖州市千金宝云机械铸件有限公司 | 液压驱动钻机的控制系统 |
| CN103867126A (zh) * | 2014-03-20 | 2014-06-18 | 湖州市千金宝云机械铸件有限公司 | 电机驱动的水平定向钻机 |
| US10150166B2 (en) | 2014-05-26 | 2018-12-11 | Novator Ab | Method, system, computer programme and a computer programme product for working of a work piece |
| CN104141483B (zh) * | 2014-07-25 | 2017-05-03 | 北京北矿亿博科技有限责任公司 | 用于露天深孔爆破的数字化钻孔控制方法和系统 |
| CN104088620B (zh) * | 2014-07-29 | 2017-01-18 | 江苏中矿立兴能源科技有限公司 | 一种可识别围岩松动范围的智能气动支腿型振动锚杆钻机 |
| CN109458169B (zh) * | 2018-11-16 | 2023-11-14 | 天水电气传动研究所有限责任公司 | 一种分离式大功率制动系统控制装置 |
| CN111037556A (zh) * | 2019-12-19 | 2020-04-21 | 上海新时达机器人有限公司 | 一种打孔控制方法及打孔控制设备 |
| CN113338892B (zh) * | 2021-06-01 | 2023-06-02 | 北京市政建设集团有限责任公司 | 一种智能浅埋暗挖的性能监测方法及装置 |
| CN115875009B (zh) * | 2023-02-06 | 2023-06-20 | 中建隧道装备制造有限公司 | 硬岩钻进用超前钻机控制方法 |
-
1992
- 1992-04-23 CN CN 92106897 patent/CN1031212C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN1077774A (zh) | 1993-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1031212C (zh) | 牙轮钻机的控制方法和微机自动控制系统 | |
| US5321637A (en) | Method for measuring the weight of a suspended load | |
| CN109269902A (zh) | 一种加载刚度可调岩石力学试验系统及试验方法 | |
| CA2009742A1 (en) | Variable speed pump control | |
| CN107843711B (zh) | 一种基于冲击加速度的强夯施工效果检测方法 | |
| CN2494982Y (zh) | 数字化冲击试验机 | |
| CN107543734A (zh) | 一种液压凿岩机性能的测试系统及其测试方法 | |
| EP0632165B1 (de) | Verfahren zum Feststellen und Anzeigen der beim Arbeiten mit einem Bodenverdichtungsgerät erreichten Bodendichte | |
| CN103091082A (zh) | 全钻头破岩试验系统及其试验方法 | |
| CN109695471B (zh) | 可控频率振动法提高煤层瓦斯采收率的实验装置及方法 | |
| CN107843743B (zh) | 一种基于冲击加速度的强夯施工数据采集方法 | |
| CN108375521A (zh) | 一种模拟盾构机刀具磨损的试验装置和方法 | |
| CN110031399A (zh) | 由细颗粒土内粘聚力推求刀齿与土体之间粘附力的方法 | |
| CN103105289A (zh) | 全钻头破岩试验系统 | |
| CN106018753B (zh) | 覆岩隔离注浆充填粉煤灰浆体压缩实验系统及方法 | |
| CN102748340A (zh) | 装载机工作装置液压系统能量损失的分析方法 | |
| AU2020100919A4 (en) | An SRM-driven Mining-Based Direct Shear Apparatus And Its Implementation Method | |
| CN103091006A (zh) | 用于钻头齿圈破岩性能的测试方法 | |
| CN110565732B (zh) | 液压挖掘机铲斗与斗杆姿态关联系数评价方法 | |
| Karpuz et al. | A new method for determining the depth of cut using power shovel monitoring | |
| CN103486994B (zh) | 一种强夯机及其夯击深度检测装置和检测方法 | |
| CN103105291A (zh) | 钻头齿圈复合破岩试验方法 | |
| CN103104242A (zh) | 钻头齿圈复合破岩试验系统及其试验方法 | |
| CN110749741A (zh) | 车载移动式全自动采制样系统 | |
| CN102466565A (zh) | 一种石油钻头破岩性能的测试方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |