CN102484736A - 用于三维(3d)投影的亮度校正的方法和系统 - Google Patents
用于三维(3d)投影的亮度校正的方法和系统 Download PDFInfo
- Publication number
- CN102484736A CN102484736A CN2010800396795A CN201080039679A CN102484736A CN 102484736 A CN102484736 A CN 102484736A CN 2010800396795 A CN2010800396795 A CN 2010800396795A CN 201080039679 A CN201080039679 A CN 201080039679A CN 102484736 A CN102484736 A CN 102484736A
- Authority
- CN
- China
- Prior art keywords
- brightness
- image
- projection
- difference
- stereo
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/363—Image reproducers using image projection screens
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B35/00—Stereoscopic photography
- G03B35/18—Stereoscopic photography by simultaneous viewing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/133—Equalising the characteristics of different image components, e.g. their average brightness or colour balance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/167—Synchronising or controlling image signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/327—Calibration thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N2013/40—Privacy aspects, i.e. devices showing different images to different viewers, the images not being viewpoints of the same scene
- H04N2013/405—Privacy aspects, i.e. devices showing different images to different viewers, the images not being viewpoints of the same scene the images being stereoscopic or three dimensional
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Stereoscopic And Panoramic Photography (AREA)
Abstract
公开了一种用于在基于胶片或数字图像的三维(3D)投影中使用的亮度校正的方法和系统。基于投影系统的亮度信息,可以提供亮度调整,该亮度调整能够用于校正3D投影的立体图像中的亮度差别。
Description
对相关申请的交叉引用
本申请要求于2009年7月7日提交的美国临时申请序列号61/223,596、“Method and System for Luminance Correction for 3D Projection”以及于2009年11月13日提交的美国临时申请序列号61/261,286、“Method and System forLuminance Correction for Three-Dimensional(3D)Projection”的优先权,通过整体引用而将二者合并于此。
技术领域
本发明涉及一种用于在三维(3D)投影中使用的辉度(luminance)校正的方法和系统。
背景技术
当前三维(3D)电影的浪潮正得以流行,并且因3D数字影院投影系统的易于使用而变得可能。然而,那些系统的部署(rollout)速度供不应求,这部分是由于所牵涉的比较高的成本。虽然早期的基于3D胶片的系统经受了各种技术困难,包括误配置、低亮度(brightness)和图片的变色,但它们与数字电影方法相比相当低廉。在二十世纪八十年代,在美国和别处出现3D电影的浪潮,其利用由Chris Condon(美国专利4,464,028)设计且拥有专利权的透镜和滤光器。提出了对Condon的其他改进,诸如在美国专利5,481,321中由Lipton提出的。通过整体引用而将这两份参考文献的主题合并于此。
一种透镜配置、即上下式(over-and-under)透镜或“双透镜”布置(例如,投影用于一只眼睛的图像的上透镜和投影用于另一只眼睛的图像的下透镜)投影具有差分(differential)亮度的相应左眼图像和相应右眼图像,该差分亮度在呈现屏幕的顶端部分和底端部分处尤其大。在该讨论中,术语“差分亮度”可以用于指示在立体对(立体图像对指关于特定帧或场景的左眼图像和右眼图像)的图像的亮度之间存在的差别或差异,并且取决于上下文,其也可以指亮度差的量值或指标。在使用量值的那些上下文中,差分亮度是一个图像的亮度相对于另一个图像的亮度的比率,通常(但不是必须)以更亮的图像的亮度作为分子。因为运动图片投影仪的照明亮度通常在光圈挡片的开口处的中央、靠近照明器的光轴和相关聚光器件更亮,所以出现该亮度差别。光通量(即通过胶片的区域的光量)随自光圈挡片的开口的该明亮中心起的远离而平滑下降。
在具有双透镜配置的立体投影仪中,在该明亮中心的上面和下面提供来自胶片或数字文件的左眼图像和右眼图像,其中光通量在一个图像的底端附近和另一个图像的顶端附近最高。对于左眼图像和右眼图像的照明的不同亮度轮廓可能导致有害效果,诸如难以感觉到所希望的3D效果、图像的某些区域中的闪烁感、或导致观众的眼睛疲劳。
因为在许多基于胶片的投影系统和一些数字投影系统中使用该双透镜配置,所以亮度差别的存在可能不利地影响许多3D胶片或数字呈现。通常,对于各个左眼图像和右眼图像具有不一致辉度和/或投影几何学的投影系统易于受此影响(例如,使用成像器的时域复用来投影来自具有相同几何学的同一物理成像器的左眼图像和右眼图像的数字投影系统不受到差分照度(illumination)问题)。
虽然亮度差别补偿可以有助于基于胶片的呈现和数字呈现,但是对于基于胶片的系统,还希望通过改进图像分离、色彩和亮度来改进3D呈现质量,以便与数字影院呈现相竞争。
发明内容
除其他以外,本原理的实施例提供一种用于减小关于三维(3D)投影的立体图像对中的亮度差别的方法和系统。
一个实施例提供一种用于在三维(3D)投影中使用的方法,包括:(a)获得用于减小立体图像对中的两个图像之间的亮度差别的亮度调整;以及(b)将亮度调整应用于所述两个图像中的至少一个图像的至少一个区域。
另一个实施例提供用于在三维(3D)投影系统中投影的多个图像,包括第一图像集合和第二图像集合,来自第一图像集合的每个图像与来自第二图像集合的相关联图像形成立体图像对;其中第一图像集合和第二图像集合中的至少一个并入亮度调整,用于至少部分补偿任意立体图像对的各个图像之间的亮度差别,并且所述亮度补偿与所述投影系统相关联。
另一实施例提供一种用于三维(3D)投影的系统,包括:投影仪;以及至少一个处理器,被配置为基于与所述投影仪相关联亮度差别信息来建立亮度调整,并将所述亮度调整应用于用于3D投影的一个或多个图像的至少一个区域。
另一实施例提供一种存储有指令的计算机可读介质,当由处理器运行时,所述指令将执行包括如下步骤的方法:(a)获得用于减小立体图像对中的两个图像之间的亮度差别的亮度调整;以及(b)将亮度调整应用于所述两个图像中的至少一个图像的至少一个区域。
附图说明
通过考虑参照附图的下面具体描述,可以容易地理解本发明的教导,其中:
图1图示双透镜立体胶片投影系统;
图2图示来自图1的立体胶片投影系统的投影后的左眼图像和右眼图像;
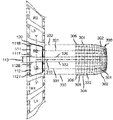
图3图示来自图1的系统的照明的轮廓;
图4图示投影到屏幕上的右眼图像和左眼图像的亮度外观;
图5是现有技术的上下式立体胶片的一部分;
图6是本发明的上下式立体胶片的一部分,其具有增加的浓度,用于校正立体图像之间的亮度差别;
图7图示用于产生图6的亮度校正胶片的一个实施例;
图8图示用于产生具有亮度校正的胶片或数字文件的另一实施例;
图9图示双透镜数字投影系统;以及
图10图示用于减小两个投影后的立体图像之间的亮度差别的另一实施例。
为了便于理解,在可能的地方,以使用相同的参考数字来指示图中公共的相同元素。附图没有依比例绘制,并且可能为了清楚而夸大或缩小一个或多个特征。
具体实施方式
现有的单投影仪3D胶片系统使用双透镜来同时投影在同一条胶片上被彼此上下布局的左眼图像和右眼图像。这些现有技术的“上下式”3D投影系统在左眼图像和右眼图像之间、特别是屏幕的顶端和底端展示出差分照度。这分散了观众的注意力,导致了眼睛疲劳,并降低了3D呈现。差分照度主要是由于左眼胶片图像和右眼胶片图像因它们在胶片门(film gate)上的相反位置而接收不同的照度外观(profile)而导致的。
本发明通过提供一种印刷胶片或者与该印刷胶片对应的数字文件因此来表现这些差异和补偿的特征,所述印刷胶片在其中立体对的一个图像与其立体配对方相比否则将太亮的一个或多个区域具有亮度调整。
现有的投影系统包括:具有双透镜配置的单个、标准、2D胶片投影仪,以同时投影两个图像中的每个(一个用于左眼,另一个用于右眼);以及滤光器,其与双透镜的左眼和右眼半部分的每一个排列(inline)(通常分别为顶端和底端),该滤光器对立体对的相应左眼图像和右眼图像进行编码,以使得当被投影到屏幕上时,佩戴具有与双透镜系统的滤光器对应的滤光器且被正确定向的眼镜的观众将在他们的左眼中感知到左眼图像,而在他们的右眼中感知到右眼图像。这将在下面作为背景而讨论,以有助于本发明的描述。
参照图1,示出上/下透镜3D胶片投影系统100,其也被称为双透镜3D胶片投影系统。矩形左眼图像112和矩形右眼图像111(通过帧内间隙113而分开)——二者均在上/下3D胶片110上——在被光圈挡片120(为了简明起见,仅图示了其光圈的内边缘)成帧(frame)时同时由胶片后面的光源及聚光器件(未示出)照亮,使得胶片110上的所有其他图像是不可见的,因为它们被光圈挡片的不透明的部分所掩盖。
参照图3更具体地讨论由光源和聚光器件所提供的照度外观。
通过光圈挡片120可见的图像由上/下透镜系统130投影到屏幕140上,如结合图2示出并讨论的,它们通常被对准并叠加。具体而言,从透镜130至屏幕140的投射距离(throw distance)151和双透镜轴间距150需要会聚角152以确保右眼图像111和左眼图像112在屏幕140上被正确对准。
上/下透镜系统130(也称为双透镜系统)包括主体131、入口端132和出口端133。通过隔断138来分离透镜系统130的上半部分和下半部分,该隔断138防止杂散光(stray light)在两半部分之间穿过。通常与右眼图像(诸如111)相关联的上半部分具有入口透镜134和出口透镜135。通常与左眼图像(诸如112)相关联的下半部分具有入口透镜136和出口透镜137。同样是为了简明起见,没有示出在双透镜系统130的每半部分内的其他透镜元件和孔径光阑。当适合对投影系统100做适当调整时,也可以添加额外的透镜元件(也未示出),例如,在双透镜130的出口端后面的放大镜。
投影屏幕140具有观看区域中心点141,两个胶片图像111和112的投影图像应当在该观看区域中心点141集中。理想地,两个投影图像的顶端在屏幕观看区域142的顶端处对准,且投影图像的底端在屏幕观看区域142的底端处对准。
图1中示出右眼和左眼专用滤光器或快门161和162,它们通常被安装在双透镜系统130之上或靠近双透镜系统130、例如分别在出口透镜135和137之后,以对投影的右眼和左眼图像进行编码,从而使得由每位观众佩戴的一副适当镜片上的对应滤光器或快门确保左眼图像仅被观众的左眼观看到且右眼图像仅被观众的右眼观看到(至少只要是他们正佩戴眼镜时)。用于该目的的各种这样的滤光器都是熟知的,包括线性偏光器、互补色(anaglyphic)(红色和蓝色)、隔行扫描干涉梳状滤光器。有源快门眼镜也是可行的,例如使用LCD快门来与类似定时的快门操作同步地在阻挡左眼或右眼之间交替、以便取消(extinguish)对应胶片图像的投影。在由Huber等共有的于2009年12月15日提交的PCT专利申请(PCT/US09/006557)“Improved Over-UnderLens for Three-Dimensional Projection”中描述了并入用于投影3D呈现的立体图像的圆形偏光器的装置。
在一个示例中,滤光器161是具有垂直方向性的吸收式线性偏光器,且滤光器162是具有水平方向性的吸收式线性偏光器。屏幕140将是偏振保持投影屏幕,例如银屏。因而,通过双透镜130的上半部分投影的右眼图像111具有垂直偏振,且通过双透镜130的下半部分投影的左眼图像112具有水平偏振,被保持为投影图像的两个图像被屏幕140反射。佩戴了具有右眼线性偏光器和左眼线性偏光器的眼镜(未示出)的观众成员将在他们的右眼看到投影的右眼图像111并在他们的左眼看到左眼图像112,该右眼线性偏光器具有垂直偏振轴,且左眼线性偏光器具有水平偏振轴。
图2示出在具有中心点141的投影屏幕140的观看部分上的立体图像对的投影呈现200。投影呈现200具有基本在屏幕的中心点141彼此交叉的垂直中心线201和水平中心线202。
当被适当对准时,左眼投影图像和右眼投影图像利用ABCD限定的周界在垂直中心线201上水平集中且在水平中心线202上垂直集中。投影的左眼图像和右眼图像的顶端接近可视屏幕区域的顶端142,并且投影图像的底端接近可视屏幕区域的底端143。在这种情况下,分别由左眼图像边界212(以点线示出)和右眼投影图像边界211(以虚线示出)来表示结果投影的左眼图像和右眼图像112和111的边界。
由于透镜130的配置的优点,胶片110上的图像111和112在投影后变得颠倒。因而,在投影仪中提供具有颠倒的图像的胶片110,以使得投影图像将表现为是正立的。如图1中所示,右眼图像111的顶端111T和左眼图像112的底端112B的位置接近光圈挡片120中的开口的中心,而右眼图像111的底端111B和左眼图像112的顶端112T的位置接近光圈挡片开口的边缘。当投影时,各个图像的顶端111T和112T将表现为接近屏幕140的顶端边缘142,且图像的底端111B和112B将表现为接近屏幕140的底端边缘143。
如先前所提到的,来自光源和聚光器件(未示出)的照度通过光圈挡片120中的开口而一般是不均匀的。典型地,光圈挡片120中的开口的中心最亮,且照度以或多或少的辐射图案而下降,如图3中的例子所示,其示出通过光圈挡片120中的开口的照度外观300(或光通量)。最大照度310对应于光圈挡片120中的开口的中心,其也位于图像111和112的垂直中心线YY’上以及帧内间隙113的中央。因而,典型地,在如所示出的立体上下投影配置中,照明器的最亮区域、即最中心处不用于将图像的任何部分投影到屏幕上。
通过等高线(contour line)301-306示出该良好对准的示例系统的径向对称亮度分布外形,等高线301-306表示恒定亮度的线。对于某些光源,这些等高线301-306将形成椭圆形或其他平滑形状,而不是如图3中所示的圆形。
在一个例子中,等高线301标识光圈开口的中心处的最大亮度值310的95%的亮度值。沿中心线YY’并分别与右眼图像111的顶端和左眼图像112的底端对应的亮度值320和332二者都接近最大亮度310,并且在该例子中,这二者彼此近似相等。此外,等高线302、303、304、305和306表示最大亮度310的90%、85%、80%、75%和70%的各个亮度值。
根据亮度外形300,人们可以确定左眼图像112的顶端112T处的亮度值330近似为中心亮度值310的90%(根据其在等高线302附近),并且近似等于右眼图像111的底端111B处的亮度值322。
作为进一步的图示,亮度值331与沿左眼图像112的侧边缘的位置对应,并且如根据其在等高线306附近所理解到的将大约是中心亮度值310的70%。类似地,与沿右眼图像111的侧边缘的位置对应的亮度值321也大约是中心亮度值310的70%。
当具有照度外形300的投影光源用于通过双透镜系统130投影立体图像时,其在屏幕处得到能够由诸如在图4中示出的那些亮度外形的亮度外形来表示的亮度分布。图形400示出相对亮度外形431R和431L,相对亮度外形431R和431L在y轴上分别绘出作为底端边缘143的高度(沿x轴)的函数的、关于投影右眼图像和左眼图像沿屏幕上的垂直中心线201(见图2)的相对亮度。
注意,可以通过测量不同的亮度相关参数、例如辉度或照度来获得相对亮度外形(辉度是正从特定观看角度注视表面的人感知到多少光功率的量度,而照度是入射光的强度的量度,并且二者都被发光度函数波长加权以与人类亮度感知相关)。虽然以不同的单位来测量,即辉度以流明/立体弧度/平方米(lumens/steradian/m2)为单位且照度以流明/平方米(lumens/m2)为单位,但是它们二者包括单位“流明”,其提供了对人类视觉的加权。测量过程可以根据正测量哪个参数而变化。虽然也可以使用其他亮度相关参数、例如辐射能(radiance)或辐照度(irradiance)来获得亮度外形,但是因为用于测量辉度或照度的光测量仪是普遍可获得的,所以测量这些参数更加方便。
因为本发明旨在校正因用于投影右眼图像和左眼图像的照度外形的差异而导致的立体图像对的亮度差别,所以从图4的亮度外形中排除与在胶片110上呈现的图像内容相关联的亮度变化以及图像111和112之间的立体视差。换句话说,感兴趣的亮度差别仅仅是诸如照明器、光圈挡片开口、投影光学组件(例如透镜、滤光器)和屏幕的几何形状的系统配置的函数。
因而,虽然在该讨论中参照用于亮度测量的立体对的投影图像的相对亮度,但是可以理解这对于右眼图像和左眼图像假设基本相等和均匀的浓度(虽然在实践中这对于胶片中的实际图像是不需要的),并且可替代地,其可以指代操作投影仪“空门(open gate)”、即在投影仪中无胶片的配置。换句话说,图4中的相对亮度外形也可以表示通过图1的相应上透镜和下透镜的投影光的外形,可以适当具有或不具有胶片110。
在图4中,x轴从与投影屏幕140的可视部分的底端边缘143对应的最小高度坐标x1开始,增加到与水平中心线202对应的中间高度坐标x2,直到与屏幕的顶端边缘142对应的最大高度坐标x3。
在y轴上,100%的最大相对亮度值y1与投影图像的最亮部分对应。在该例子中,亮度外形431L和431R示出最亮部分分别与投影左眼图像112的底端112B(图3中的亮度级332)和投影右眼图像111的顶端111T(图3中的亮度级320)对应。
在该例子中,亮度曲线431L和431R关于高度x2而彼此对称。在替换的实施例中,由于通过光圈挡片120的照度的图案、投影系统100的几何形状、屏幕140的特性或观众的座椅位置(后两个因素仅与自辉度测量导出的亮度外形有关),曲线可以是不对称的。然而,为了简明的目的,本讨论涉及关于屏幕的水平中心线、即图形400中的高度x2而具有照度的对称下降的系统。
沿垂直中心线201,对于投影右眼图像的底端(高度坐标x1)和投影左眼图像的顶端(高度坐标x3)、在坐标y3处最小亮度是大约92%。投影右眼和左眼图像仅在坐标x2周围、即水平中心线202附近具有相等的亮度(大约97%)。
如在图4中显然的是,对于小于x2(即,水平中心线202以下)的任何高度坐标x,投影左眼图像比投影右眼图像更亮,而对于大于x2(即,水平中心线202以上)的任何高度坐标x,投影右眼图像比投影左眼图像更亮。
可以通过在各个图像的、其中一个图像的亮度曲线超过另一个图像的亮度曲线的区域中向胶片印片110添加额外浓度来减小或消除两个立体图像之间的亮度差别,如亮度曲线431L和431R的分叉所示的。要在区域中添加的浓度的量与曲线的高度比、即区域内的差分亮度有关。浓度是透射率的倒数的对数。在其中更亮图像与更暗图像的亮度比是“r”的区域中,额外浓度可以被计算为log10(r)。因而,在其中亮度比是2∶1(即2.0)的区域中,要向更亮图像添加的额外浓度是log10(2.0)=0.3。可替换地,如果以“光圈数(stop)”来表示,则在浓度计算中将使用log2,在这种情况下,添加的浓度将是log2(2)=1.0光圈数。
例如,如图形400所示,在垂直中心线201附近的、屏幕143的底端(即,高度坐标x1)处,投影左眼图像具有100%的相对亮度,这高于同一区域中的投影右眼图像的92%的亮度。因而,为了减小两个投影图像之间的亮度差别,应当利用log10(100/92)=0.036的额外浓度或log2(100/92)=0.12光圈数来印刷垂直中心线YY’附近的左眼图像112的底端112B(见图3),这将使得亮度曲线431L的那部分下降(以向下箭头示出),结果是亮度外形的部分432L中的减少的亮度。类似地,也可以向右眼图像111的顶端部分111T(见图3)添加额外浓度,以减小其相对于那个区域内左眼图像112的顶端的亮度,结果是亮度外形的部分432R中的减少的亮度。虽然未示出,但是可以添加额外浓度以使得减少亮度部分432L或432R与曲线431R或431L的相应的下部分一致,即左投影和右投影具有相等的亮度。
在图像的中心(高度坐标x2)附近,在该例子中,因为相对亮度基本相等,所以不需要额外浓度。
可替换地,如果希望投影左眼图像和投影右眼图像的一个或多个部分在亮度级上具有预定或给定差(例如,与曲线431L和432R中所示的不同,并且两个图像的亮度不必相等),则可以计算适当的额外浓度并将其添加到对应图像的适当部分(或多个部分)。
在另一个实施例中,在图像的中心附近,可以向一个或两个图像添加少量额外浓度,使得在左眼和右眼亮度外形431L和431R之间的交叉点处(高度坐标x2处及其周围)不存在“尖突(cusp)”。这样做的优点是,在投影左眼图像或投影右眼左眼的亮度改变率沿垂直方向不连续(例如,如果在校正后在外形431L和431R的斜坡上存在尖端)的情况下,避免在屏幕的中央感知到水平伪影。
可替代地,取代向第一立体图像(例如右眼图像)添加浓度以减小其相对于第二图像(例如左眼图像)的亮度,也可以减小第二图像相对于第一图像的浓度(以增加亮度)。因而,当对所涉及的特定图像合适时,浓度调整可被用来指代浓度增加或降低。
图5示出一条现有技术的立体运动图片胶片500。胶片502具有接缝孔504且能够承载可以为数字的光学音轨(soundtrack)506。左眼图像510、512和514分别与右眼图像511、513和515形成立体对。帧内间隙520是立体对、诸如左眼图像512和右眼图像513的帧之间的空隙。图像510-515通常承载被空间编码为印刷胶片500的感光乳剂的浓度调制的图片(未示出)。
图6示出根据本原理的一个实施例的一条立体运动图片胶片600,其中为了补偿差分亮度而在一些部分添加了浓度。具有接缝孔604和光学音轨606的胶片602包括图像610-615,图像610-615与原始或未补偿图像510-515对应且具有对应立体关系(例如,左眼图像612与右眼图像613形成立体对)。然而,因为在上面讨论的示范性系统(见图4)中,如果不对左眼图像的底端部分补偿亮度差异则左眼图像的底端部分将比对应右眼图像的底端部分更亮,所以在每个左眼图像610、612和614的底端部分中以利用额外浓度来印刷每个图像。对于左眼图像610、612和614,额外浓度从中心朝着左眼图像的底端边缘逐渐增加,这与外形431L和432L从高度坐标x2至x1的相对亮度值之间的差异一致,图示出额外浓度至少已部分地对左眼外形和右眼外形431L和431R之间的差分亮度进行了补偿。
类似地,已在每个右眼图像611、613和615的顶端部分中利用额外浓度印刷了每个图像(朝着这些图像的顶端逐渐增加浓度),以便朝着投影图像的顶端部分减小右眼图像和左眼图像之间的亮度差别。
在需要额外浓度(为了相较于第二眼图像减小第一眼图像的亮度)的第一眼图像的任意位置处,由第一眼图像的亮度与第二眼图像中对应区域的亮度之比的对数来给出对于印刷胶片600的所有第一眼图像(可以被称为第一图像集合)、要添加到那个位置的额外浓度的量。换句话说,如果I1>I2,其中I1和I2表示在某一对应位置处对于第一眼图像和第二眼图像测量或估计的相应亮度相关参数(例如辉度或照度),则由log[(I1)/(I2)]给出在那个位置处要添加到第一眼图像的浓度。然而,如果I1小于或等于I2,则不向第一眼图像添加额外浓度(虽然例如如果I1<I2则可能存在要添加到第二眼图像的对应位置的额外浓度)。
返回图6中的例子,左眼图像610的底端部分可以例如基于图像的底端边缘以上的高度而被划为各种区域。当被投影的屏幕上时,这些区域将与图4中通过x坐标限定的屏幕上的区域(例如,由x坐标的不同范围限定的水平区域)对应。在一个例子中,假设图4的亮度图形400适用于屏幕的整个宽度、即不仅仅是在中心垂直线201处。因而,可以向关于同一只眼睛的所有图像的同一水平区域内的所有位置添加恒定额外浓度(部分地通过连同图4描述的过程确定)。
在更一般的情况中,投影图像空间的其他部分(例如,屏幕的左垂直边缘AB或右垂直边缘附近)可能不具有与图形400相同的亮度分布,在那种情况下,在其他位置将需要额外亮度测量,以确定要应用于左眼图像和右眼图像的其他部分的适当额外浓度。因而,可以横跨投影屏幕140在多个位置做出差分亮度测量(例如,对立体图像对执行的亮度测量),以产生横跨屏幕140的宽度的不同位置处的亮度图形(例如,在图2中的左垂直边缘AD和右垂直边缘BC之间沿不同垂直线的亮度外形)。然后,这样的测量可以被内插或外插,以对于投影屏幕140上的任意位置估计投影右眼图像211和投影左眼图像212之间的不同的亮度值。在另一实施例中,测量可以用来确定对投影图像211和212之间的不同亮度进行建模的方程式的参数。
本领域技术人员将认识到,对于大多数投影屏幕来说,从屏幕反射后测量的辉度(其指示正从特定观看角度注视表面的人感知到多少光功率、即表明对那个人表现得多亮)将受到投影角度、观看角度和投影屏幕表面的色散(dispersion)(例如,朗伯(Lambertian)平面或具有增益的屏幕的色散方程)的影响。虽然这些额外因素可能使得横跨投影屏幕的表观亮度看起来非常复杂,但是本发明所产生的校正不受这些因素的影响,至少不受首要影响。原因在于,校正是基于其中额外因素以基本相等的方式影响两个图像的投影左眼图像和投影右眼图像之间的亮度差异而应用的。
在适当对准的系统中,出口透镜135相对于出口透镜137的垂直位置的轻微差异与从输出端133到屏幕140距离相比较小。因此,不同的投影角度对第一等级(the first order)的影响是可忽略地小。类似地,对于差分亮度测量,可以认为观看角度对于左眼和右眼亮度读数是相同的(忽略应当位移观看角度以将一般观众成员的瞳间间隔考虑在内)。因此,除了在罕见(甚至不切实际)的极端条件下,关于左眼和右眼的亮度读数的特定屏幕的漫射函数在屏幕上的一点处对于左眼亮度读数和右眼亮度读数二者将是基本相同的。因而,左眼亮度读数与右眼亮度读数之比将表示在获取读数的那一点处的差分亮度,且该比的对数将确定要添加的浓度,并且对于本发明的大多数实际使用来说将受到其他因素(例如投影和观看角度、屏幕的色散)的微不足道的影响。
图7图示根据本原理的一个实施例的、用于在上下式立体胶片呈现中校正两个立体图像之间的亮度差别的过程700。
在步骤701中,利用诸如照明器、光圈档片、双透镜、左眼和右眼投影透镜滤光器(例如偏光器)以及投影屏幕之类的组件来识别用于投影立体图像的代表性投影系统、例如系统100。对于过程700的一些实施例,不需要左眼和右眼透镜滤光器。此外,应当识别上下式格式(例如图像111和112的宽高比以及帧内间隙113的尺寸)。
在步骤702中,双透镜投影系统100被接通并例如利用投影到屏幕上的左眼测试图像和右眼测试图像而被允许变得稳定(即实现操作均衡)。虽然可以使用不同的图案来作为测试图像,但是左眼图像和右眼图像应当在对应区域具有基本相同的浓度,以使得不会从测试图像的图像内容中引起任何亮度差别(从而要测量的亮度差别将反映仅由于投影系统和组件引起的差异)。在该过程的一个实施例中,无任何呈现胶片地操作双透镜投影仪,即不投影任何测试图像(可替换地,可以认为测试图像是空图像)。在该配置中,可以如下所述执行过程700中的步骤,其中投影左眼测试图像和投影右眼测试图像表示来自第一投影透镜和第二投影透镜的“空”照明。
在步骤703中,例如通过掩盖第二图像(用于一只眼睛)的透镜或阻挡第二图像的投影来执行第一图像(即用于另一只眼睛)的亮度测量并对第二图像重复该过程,而对于立体图像对的每个图像分开测量屏幕上的一个或多个测试点或位置处的亮度。可以使用不同的途径来执行亮度测量,例如通过测量辉度或照度。
对于照度测量,光测量仪被定位在屏幕上或屏幕附近的每个(一个或多个)所选择的测量点或测量位置处,以便测量来自投影仪的入射光。在一个实施例中,在屏幕上或屏幕附近的每个测量点处测量来自每个透镜135和137的照度。可以通过对于一个立体图像阻挡来自一个或多个透镜的光来做出这些分开的测量,或者如果透镜滤光器(例如偏光器等)被安装在图1的系统中,则通过使用测量仪前方的适当滤光器来滤除来自对应透镜的光而做出这些分开的测量。然而,通常更简单的是在立体图像对的两次亮度测量的每个中掩盖出口透镜135和137中的不同的一个。
在步骤703的另一个实施例中,从公共有利点(vantage point)、例如从观众就坐区的中心附近的位置来测量屏幕上的每个测试位置的辉度(而不是照度)。典型地利用光斑亮度计来测量辉度,该光斑亮度计视场限定测试或测量位置的大小。再次,如果存在用于各个右眼图像和左眼图像的投影滤光器,则可以利用通过适当观看滤光器在测试位置观看的光度计或通过在两次亮度测量的每个中阻挡来自出口透镜135和137的不同一个的光来测量辉度。从实际的观点出发,辉度测量优于照度测量,因为与在屏幕的不同位置安装测光仪来测量入射光相比,更容易在观众区安置测光仪来测量从屏幕反射的光强度。
对于辉度测量,当选择与光度计一起使用的观看滤光器时必须多加小心。例如,如果在双透镜系统中使用圆形偏光器来用于编码立体图像,则用于在光度计之前滤除给定投影图像的滤光器(例如偏光器)对于辉度测量和照度测量将是不同的(相反的)。具体而言,用于测量辉度的滤光器的选择应当考虑圆形偏振投影光在从屏幕反射折回后将改变其圆形偏振方向的指向(sense)。
如果预期到差分亮度根据已知图案、特别是对称图案分布,则差分亮度的模型可以适合于单个差分亮度读数(即两个读数,来自预定点处投影左眼图像和投影右眼图像中的每一个)。然而,通常,在屏幕上的多个点或位置处需要差分亮度的测量,例如至少两个差分亮度测量,对于至少两个不同位置的每一个。
在可替换的实施例中,系统100可以利用具有标记以帮助测量的一条测试胶片来操作,例如通过周期性地在希望的测量点显示十字准线,而以足以进行亮度测量的时间间隔去除那些十字准线。
在步骤704中,来自测试点的亮度测量(例如相关参数的亮度测量)用于估计或计算关于投影左眼图像和投影右眼图像的每一个中的至少一个区域的亮度信息,诸如差分亮度。注意,这样的差分亮度估计不必必须对投影图像的整个范围(extent)都执行。在一个实施例中,可以通过测量值的内插和/或外插来进行这样的测量。在另一个实施例中,差分亮度的数学模型与测量数据拟合,然后被用于估计投影图像的至少一个区域内或投影图像的整个范围中的差分亮度。
在步骤705中,根据步骤704的亮度信息来确定用于左眼图像和右眼图像的至少一个中的至少一个区域的浓度调整、例如增加。浓度增加在减小投影左眼图像和投影右眼图像中的亮度差别或差分亮度方面是有效的。可以由第一眼图像的一区域中的亮度与第二(或相反)眼图像的对应区域中的亮度之比的对数来给出该浓度增加。因而,如果第一眼图像的一个区域比第二眼图像的对应区域更亮,则由log[(I1)/(I2)]给出要添加到第一眼图像的浓度,其中I1>I2,并且I1和I2是对于那些区域中的第一眼图像和第二眼图像测量或估计的相应的亮度相关参数(例如辉度或照度)。如果第一眼图像的区域的亮度等于或小于第二眼图像中对应区域的亮度,则不需要对第一眼图像的那个区域添加浓度。
可替换地,在其中例如通过使用查找表来根据亮度测量直接做出增加浓度确定的情况下,步骤704和705可以被组合为单个步骤。
在步骤706中,3维呈现或示出的左眼图像和右眼图像(即立体图像对)通过在立体图像的至少一个集合、即展示的所有左眼图像或所有右眼图像的集合的区域内并入来自步骤705的浓度调整而被记录在胶片介质上(或者,对于底片(film negative),使用相反的浓度调整)。对其并入浓度调整的呈现的图像的该区域应当与在步骤704中从其获得亮度信息的测试图像的同一区域对应。
该记录的底片具有当在步骤707中印刷时有效补偿或减小投影左眼图像和投影右眼图像中的亮度差别或差分亮度(即与投影系统相关联的亮度差别)的图像浓度。对于每个立体图像对,利用被选择来在对应胶片印片中产生适当额外浓度的曝光不足量,在与其中需要额外浓度——即在步骤705中确定的浓度增加——的胶片印片(从该底片制造的)的那些区域对应的至少一个图像的区域中,使底片曝光不足(即显影后浓度降低)。
可替换地,取代在底片上记录或除了在底片上记录之外,可以为了以后使用以数字形式记录浓度调整。例如,可以在文件中存储并在此后打印表示将否则用于记录校正底片(或正片(film positive))的浓度值的数字代码。
在胶片印刷步骤707中,进行印刷,其中与底片的曝光不足区域对应的额外浓度的区域已被正确显影。
可替换地,可以在步骤706中制作正片,其中直接记录额外浓度的区域(例如,通过各个立体图像的对应区域中的过度曝光),并且印刷步骤707(如果需要的话)将制作正片的中间正片(interpositive)副本。使用本领域中公知的技术来进行负片或正片以及胶片印片的处理。
在另一个实施例中,与胶片印片中增加浓度对应的区域可以被写为另外被准确曝光(flatlyexposed)的帧(即除了曝光不足或更清晰区域之外,当显影时被有效灰度化(优选地,光灰度化)的帧)中的底片的曝光不足区域。如此生产的底片仅包括额外浓度校正的反,并且当利用现有技术的底片(即对于差分亮度补偿不具有任何浓度调整的底片)双向封装以及在专用印刷通道印刷以制作具有补偿浓度的胶片印片时可以提供切趾函数(apodizationfunction)。在该实施例中,校正底片可以被制作一次并用于对要与类似于系统100的投影系统一起使用的所有胶片的印刷提供亮度校正。
过程700在步骤708终止。可以在投影系统100是其充分代表的影院中显示显影后的印刷胶片。
在另一实施例中,由于在图像内容本身中已经存在浓度,所以要添加到区域的浓度(在步骤705中所需要的)可能导致印刷胶片的饱和或底片的“曝光过度(blowing out)”,其中必要的曝光移动至胶片的感光(sensiometric)曲线的非线性区域。在这种情况下,可以修改步骤705中的过程,例如,通过减小更暗图像区域的浓度,和/或与向小于所需的原始浓度的更亮图像区域添加浓度量相组合。通过修改立体图像对中的两个图像的浓度,可以减小或消除亮度差别(更亮图像的增加浓度加上更暗(dimmer)图像的减小浓度的量值等于在更亮图像中原始需要添加的浓度),同时避免或较少了在最亮或最深(darkest)曝光处的潜在裁切(clipping)。在这样的实施例中,应当多加小心以避免除了图像内容自身所提供的以外的、亮度的斜坡中的不连续。此外,在一个场景内,应当避免或最小化亮度补偿的形状中的时域改变。
图8图示用于产生胶片或数字图像文件以减小立体图像对的投影左眼图像和投影右眼图像之间的亮度差别的另一方法800。在步骤802中,诸如用于利用两个不同的透镜组件来投影左眼图像和右眼图像的双透镜系统的投影仪被允许实现操作均衡条件。虽然该稳定步骤是可选的,但是如果将要执行亮度测量,则其帮助提供可重复的数据。因而,稳定步骤对于基于胶片的系统更有用,在基于胶片的系统中,弧光灯照明是依赖于灯泡温度的且对弧光位置敏感。如果使得方法800适合于与某些视频或数字投影系统一起使用,则因为光源——例如灯丝、阴极射线管(CRT)、发光二极管(LED)等——可以具有短得多的稳定时间,所以稳定并不很重要。
在步骤803中,对由投影仪照明的屏幕上的至少一个点或位置进行亮度测量,以获得与立体图像对的投影相关联的差分亮度信息。可以在投影立体测试图像上、或在“空门”配置——即来自用于投影左眼图像和右眼图像的投影透镜组件的空白照明——中做出这样的测量。
更具体而言,对屏幕(即投影图像空间)上的至少一个位置执行亮度测量。如果使用立体测试图像,则它们可以被提供在胶片或数字文件中并被投影以用于表现图像的差分亮度(或亮度差别)的特征。在数字文件的情况下,通常以编码后的压缩格式(例如,JPEG2000)存储图像,该编码后的压缩格式需要投影仪进行解码以便呈现(这样的编码文件和由图像处理器进行的解码未示出的,且是公知的)。可以通过测试两个立体测量图像的辉度或照度来执行亮度测量。可以使用针对步骤703描述的类似过程。
如果在没有任何胶片或测试图像(即类似于投影透明(clear)图像)的空门中执行亮度测量,则可以在通过第一投影透镜组件(例如,用于右眼图像的投影)照明的情况下测量屏幕的一个或多个位置处的辉度或照度,并且对通过第二投影透镜组件(例如,用于左眼图像的投影)的照明重复该测量。在数字投影仪系统中,投影仪通常具有可以从菜单中选择的“白场”模式(例如,内部测试图案)。在该情形下,不需要图像数据,并且成像器的每个元件被开启并保持“接通”以在所有像素处提供最大光亮。
换句话说,对立体图像对执行的亮度测量(用于获得差分亮度信息)与测量用于投影两个立体图像的投影系统(包括照明源、具有相关联器件和滤光器的透镜组件、显示屏幕以及这些器件的配置和对准)的各个光学组件的照度外形或特性相对应。
注意,存在其中可以省略实际测量的情形,即在一些实施例中步骤802和803是可选的。例如,如果存在关于与投影的立体图像的区域相关联的差分亮度的先前知识,则可能不必为了确定适当补偿而进行立体图像的差分亮度测量,或者至少先前知识对于差分亮度是有益的(其中不完全的补偿要好于根本不补偿)。可以根据经验、通过估计、或根据基于投影的照明器的一些参数的计算(例如,反射物几何形状、等离子弧大小、照明器对准以及其它或者如图3所示的投影仪的照度外形300)、并与图像111和112的几何性质以及帧内间隙113组合来得到这样的先前知识。然而,在缺乏这样的先前知识的情况下,通常将需要对两个立体图像的亮度测量。
虽然可以通过对两个立体图像执行测量来获得更好的精度,但是在一些情况下,仅对图像中的一个执行亮度测量并假设应用对称性(例如,照度外观300所展示的对称性)可能是足够且更有效的,从而允许对于立体对的一个图像在屏幕140上的点或位置处做的测量被应用于对中的另一个图像,但是屏幕上的位置关于水平中心线202或中心点141相反。类似地,可以采用同样的对称性来允许对垂直中心线201的一侧上的位置处的一个图像做出的测量也被假设应用于垂直中心线201的另一侧上的位置处的相同图像,仅仅测量位置相反。
在步骤804中,从步骤803的各个测量位置处的测量导出关于立体测试对的投影左眼图像和投影右眼图像的至少一个区域、或者关于由第一和第二透镜组件照明的屏幕的至少一个区域的亮度信息,例如差分亮度。为了简单,也可以将对其导出差分亮度信息的区域称为投影图像空间的区域(即,其可以与投影测试图像或空门照明对应)。
与先前对步骤704描述的类似地,可以通过内插和/或外插来导出差分亮度。在一个实施例中,每个投影图像的整个范围可以被划分为多个区域,并且可以从步骤803中得到的与立体图像对的每个区域最靠近的位置的测量来估计或导出关于那个区域的亮度信息。
在步骤805中,在投影测试图像或照明屏幕的差分亮度与预定阈值之间做出比较。如果差分亮度超过阈值,则确定浓度调整的量,例如增加或减少,需要该浓度调整以减小要利用投影仪投影的立体图像对(例如,用于3D呈现的胶片或数字图像文件的立体图像对)的对应区域中的亮度差别。再次地,可以根据先前描述的过程来做出这样的确定。
如果差分亮度低于阈值(并且因此被认为是可接受的),则在要与投影系统一起使用的3D胶片或数字文件的立体图像的那个区域内将不需要浓度校正。
在步骤806中,用于立体或3D呈现的图像被记录到胶片或数字文件的至少一个中。通过将根据步骤805确定的浓度调整并入立体图像集合的至少一个区域中、即浓度调整被应用于该呈现的所有右眼图像(或所有左眼图像)的集合的同一区域而做出记录,其中所记录的图像的那个区域与对其获得差分亮度的投影图像空间的区域对应。这些“经亮度校正的”图像可以被记录在底片或正片上,如先前连同图7一起描述的。可替换地,表示浓度值(即,具有调整的浓度的)数字代码可以被存储到数字文件中,以在此后用于制造胶片印片,或者浓度调整可以以数字格式存储以与数字投影仪一起使用。在可选步骤(图8中未示出)中,可以从底片或正片来制造一个或多个胶片印片。
除了双透镜单投影仪系统之外,本原理也可以应用于同步双胶片投影仪(未示出),其中一个投影仪投影左眼图像且另一个投影仪投影右眼图像,每个投影仪通过普通的投影透镜(即不是诸如双透镜130的双透镜)。在双投影仪实施例中,双透镜轴间距离150将实质上更大,并且先前可忽略的影响亮度的因素(例如,投影入射角)可能变得显著,因为每个投影仪的投影透镜将实质上被双透镜130离得更远。
如所提到的,用于亮度差别校正的上述方法可以应用于使用分离透镜或光学器件来投影立体图像对的右眼图像和左眼图像的某些数字3D投影系统。这样的系统可以包括单投影仪或双投影仪系统,例如:由美国加州塞普拉斯(Cypress)的Christie Digital System USA公司出售的Christie 3D2P双投影仪系统;或者由美国加州圣迭戈的Sony(索尼)Electronics出售的Sony SRX-R2204K单投影仪系统,其具有诸如LKRL-A002的双透镜3D适配器,该LKRL-A002也由Sony Electronics出售。在单投影仪系统中,公共成像器的不同物理部分被分离的投影透镜投影到屏幕上。
例如,数字投影仪可以并入其上的第一区域用于右眼图像且第二区域用于左眼图像的成像器。在这样的实施例中,因为用于各个立体图像的成像器的区域的照度不同,所以立体对的显示将遭受上面关于胶片描述的差分亮度的相同问题。
在这样的实施例中,可以对立体图像对应用类似的补偿。该补偿可以被应用(例如,通过一个或多个处理器或者诸如数字影院服务器的服务器)到相应的图像数据,无论是当图像数据是为播放器将播放到投影仪的分发而准备的时还是由播放器自身提前播放或实时(即,在其他补偿后图像正播放的同时,向未补偿文件或流媒体的一个或多个图像应用补偿),所述实时是通过当向投影仪发送图像时的实时计算、投影仪自身中的实时计算、成像电子器件中的实时计算、或其组合。可以使用上面关于基于胶片的系统描述的类似过程(例如,包括修改图7和/或图8中概述的一个或多个步骤)来执行服务器中或利用实时处理的补偿或校正的计算,以产生用于减小数字立体图像中的亮度差别的类似结果。
在图9中示意性地示出数字投影系统900的例子,其包括数字投影仪910和诸如在图1的胶片投影仪中使用的双透镜组件130。在该情形中,系统900是单成像器系统,并且仅示出成像器920(例如,省略的色轮和照明器)。其他系统可以具有三个成像器(每一个用于原色红色、绿色和蓝色),并且将具有将它们光学叠加的合成器,这可以被认为是具有单个三色成像器或三个分离的单色成像器。在该上下文环境中,术语“成像器”可以用作对变形镜显示器(DMD)、硅上液晶(LCOS)、发光二极管(LED)矩阵显示器、扫描激光光栅等的一般指代。换句话说,其指在其上为投影而通过电子器件形成图像的单元、元件、组件或子系统。在大多数情况下,光源或照明器与成像器分离或不同,但是在一些情况下,成像器可以是发射性的(包括光源),例如LED矩阵。流行的成像器技术包括微面镜阵列(诸如由德克萨斯州的达拉斯的Texas Instruments(德州仪器)生产的成像器)和液晶调制器(诸如由Sony Electronics生产的硅上液晶(LCOS)成像器)。
成像器920创建动态可变的右眼图像911和对应的左眼图像912。与图1的配置类似,右眼图像911通过透镜组件130的顶端部分投影,且左眼图像912通过透镜组件130的底端部分投影。将图像911与912分开的间隙913可以是成像器920的未使用部分。间隙913可以显著小于3D胶片中的对应间隙(例如,图1中的帧内间隙113),因为成像器920并不作为一个整体来移动或平移(translate)(与胶片印片的物理前进不同),而是相反地保持静止(除了DMD中用于镜面的不同方向的倾斜之外),图像911和912可以更稳定。
此外,因为透镜或透镜系统130不太可能从投影仪中移除(例如,与胶片投影仪相反,胶片将被装入或移除),所以可以存在更精确的对准,包括使用从透镜130朝向成像器920且与隔断138共面的风向标投影。
注意,这里仅示出了成像器920。一些彩色投影仪仅包括具有色轮或其他动态可切换滤色器(未示出)的单个成像器,该色轮或动态可切换滤色器在单个成像器前面旋转以允许单个成像器动态显示多于一个的色彩。当色轮的红色部分在成像器和透镜之间时,成像器调制白光以显示图像内容的红色分量。当色轮(或滤色器)进行到绿色时,由成像器显示图像内容的绿色分量,以及对图像中的RGB原色(红色、绿色、蓝色)中的每一个如此等等。
图9示出以透明模式——即当来自照明器(未示出)的光通过胶片时其穿过成像器——操作的成像器。然而,其他成像器以反射模式操作,即来自照明器的光刺射到成像器的前面并从成像器反射回来。在一些情况下(例如,许多微面镜阵列),该反射是离轴的,也就是说不是与成像器的平面垂直,并且在其他情况下(例如,大多数基于液晶的成像器),照明的轴与反射光与成像器的平面基本垂直。
在大多数非透明实施例中,需要额外折叠光学器件、中继透镜、分光器等(本领域技术人员公知,但为了简洁未在图9中示出)来允许成像器接收照明并用于透镜130能够将图像911和912投影到屏幕140上。数字影院投影仪更加复杂,并且使用三个成像器(未示出),每一个用于RGB原色。折叠光学器件和分光器等更加复杂,但是仍然是公知的。
为了补偿对于立体图像具有不同投影光学路径的数字投影系统中的立体图像之间的差分亮度,可以使用上述连同方法800和图8一起描述的过程。例如,为了补偿数字文件中的两个立体图像之间的亮度差别,可以在一个或两个图像的适当区域内调制像素的亮度。
图10图示用于校正或减小投影系统投影的两个立体图像之间的亮度差别的可替换方法1000。该方法可适配用于产生包括已对因投影系统而引起的亮度差别进行了补偿的立体图像的胶片或数字图像文件。
在步骤1002中,获得用于减小要由投影系统投影的立体图像对(例如左眼图像和右眼图像)的两个图像之间的亮度差别的亮度调整的量。亮度调整可以包括以下中的至少一个:对于胶片的浓度增加、或对于数字图像的降低的像素亮度。在像素亮度校正的上下文环境中,与以绝对术语表示相对地,亮度调整的量更适合于被表示为亮度改变或修改的百分比。
在步骤1004中,亮度调整的量被应用于立体对的两个图像中的至少一个图像的至少一个区域。当投影经亮度校正后的图像时,与未校正的图像相比,将减小观察到的亮度差别。
当投影系统是与图1或图9中的系统类似的双透镜系统时,在两个立体图像之间观察到的亮度差别与投影系统相关联,因为该差别是因用于投影图像对的各个图像的照度外形中的差异引起的。
可以从与投影两个图像相关联的亮度差别或差分亮度中导出步骤1002中的亮度调整。如先前所提到的,存在无需实际测量即可得到差分亮度信息的情形,例如,通过使用与投影系统相关联的不同参数进行计算,或者通过基于经验或先前知识进行估计。也可以通过投影立体测试图像并使用先前讨论的技术测量照度和辉度中的一个来测量亮度差别。
上述讨论的一个或多个特征可以用于产生补偿亮度差别的立体胶片或数字图像文件,通过对要由一只眼睛观看的至少第一图像集合——例如胶片或数字文件中的右眼图像集合或左眼图像集合——的适当区域应用亮度调整来补偿亮度差别。
例如,可以通过测量、估计和计算中的至少一个来得到关于屏幕上的几个位置的与立体投影系统相关联的亮度差别信息。然后,可以使用先前描述的一个或多个技术(包括内插、外插和模型的拟合)、基于来自屏幕上的几个位置的亮度差别信息、遍及整个图像而导出用于减小投影立体图像对之间的亮度差别的亮度调整。
亮度调整可以被应用于属于立体胶片或数字图像文件的至少第一图像集合的适当区域(或多个区域),其中第一图像集合中的每个图像与来自胶片或数字文件中的第二图像集合的对应图像形成立体对。可以通过记录依据必要亮度调整的所有图像来产生经亮度调整后的胶片或数字图像文件,例如对于胶片的增加的浓度或在数字文件中的降低的像素亮度。
因为视频投影系统(即数字投影系统)通常使用基于亮度的像素来用于图像投影,所以通过降低对应像素的亮度来进行减小具有更大照度(与其他立体图像相比)的图像区域的亮度所必需的调整。
注意,如果使用关于单个帧的投影立体测试图像来测量亮度差别信息,例如关于特定图像对的左眼图像和右眼图像,则从那个单个帧测量导出的亮度调整的量可被应用于所有帧(即,对单独的帧不需要单独的测量)。
虽然已经结合特定例子描述了本发明的各种特征,但是应当理解这些特征也可用于其他变型,如下面的附加例子中所图示的。
通常,对于展示出需要校正的亮度差别的屏幕上的任意给定位置(即,投影图像空间),为了进行亮度调整或校正可以使用几个方案。
例如,人们可以通过如下选择来调整亮度:通过仅使图像变深(或增加浓度),例如参照图4;通过朝着投影图像的底端部分使左眼图像变深,从而使得曲线431L下降到432L;以及通过朝着投影图像的顶端部分使右眼图像变深,从而使得曲线431R下降到432R。可替换地,人们也可以选择仅使得各个图像的适当部分处的图像变浅(增加亮度或降低浓度)。
在一个实施例中,可以通过仅使得立体对中一个或两个图像的不同区域或部分处的图像变深来进行亮度调整。该方案与其他方案相比所具有的优势是,仅对一个立体图像提供调整,例如通过使得那个立体图像的不同区域处变亮和变深(即,最小化对胶片的限度或非胶片投影仪的动态范围的侵犯)。
在另一个实施例中,可以对立体图像对的两个图像(例如,在投影到屏幕上的某个位置的左眼图像和右眼图像的相应区域处)进行亮度调整(变深和变亮二者)。因而,为了减小屏幕上一个位置处的亮度差别,可以在具有更高照度的第一图像的一个区域或部分(与那个屏幕位置相对应)处降低亮度,同时可以在另一图像的对应区域或位置处增加亮度。换句话说,可以通过使得相应左眼图像和右眼图像的适合减小亮度差别的不同部分处变深和变亮来减小立体图像之间的亮度差别。
如果使用变深和变亮二者,则可以通过立体对的两个图像中的一个图像的选定部分或位置处的适当调整、仅对那个图像调整亮度(也无需调整另一只眼睛的图像的亮度),例如,通过增加其中图像的照度太暗的区域中的亮度或如果那个图像的亮度太暗则降低亮度。然而,与其中修改立体对的两个图像的第一方案相比,该方案具有的副作用是,扭曲(stretch)了那一只眼睛的图像在高低两端的动态范围,以致一些区域更亮而另一些区域更深,而在第一方案中每个图像仅被使得更深、即仅在一个方向上扭曲动态范围。
此外,如参照图4所讨论的,使得左眼图像和右眼图像二者变暗也是有益处的(对于两个图像的亮度相等处的附近的有限区域),从而照度的二次导数表现得平滑、即避免了“尖突”(照度的二次导数中的不连续可能被人们感知为“边缘”)。如果没有该校正,则图像可能在水平中心线202处表现出“褶皱”。
除了提供用于3D投影的方法之外,本发明的另一实施例提供了一种具有至少一个处理器和相关联计算机可读介质(例如,除其他以外的硬驱、可移除存储器、只读存储器、随机存取存储器)的系统。在一个实施例中,从计算机可读介质中排除瞬时传播信号。在计算机可读介质中存储程序指令,以使得当由一个或多个处理器执行时,该程序指令将使得实现根据以上讨论的一个或多个实施例的方法。在一些实施例中,可以使用传统的未补偿文件和普通数字影院服务器或流媒体来实时实现差分亮度的补偿,例如,利用嵌入投影仪内的处理指令。本发明的亮度补偿可以通过一个或多个处理器被应用到相应的图像数据,无论是当图像数据是为播放器将播放到投影仪的分发而准备的时还是由播放器自身提前播放或实时,所述实时是通过当向投影仪发送图像时的实时计算、投影仪自身中的实时计算、成像电子器件中的实时计算、或其组合。
虽然前面旨在本发明的各种实施例,但是可以设计本发明的其他和进一步的实施例,而不会脱离本发明的基本范围。因此,根据下面的权利要求来确定本发明的适当范围
Claims (21)
1.一种用于在三维(3D)投影中使用的方法,包括:
(a)获得用于减小立体图像对中的两个图像之间的亮度差别的亮度调整;以及
(b)将所述亮度调整应用于所述两个图像中的至少一个图像的至少一个区域。
2.根据权利要求1所述的方法,其中,所述亮度差别是因用于投影所述两个图像的两个照度外形之间的差异而引起的。
3.根据权利要求1所述的方法,其中,步骤(a)中的所述亮度调整是从与所述两个图像的投影相关联的亮度差别信息中导出的。
4.根据权利要求3所述的方法,其中,通过以下中的至少一个来得到所述亮度差别信息:测量、估计和计算。
5.根据权利要求3所述的方法,进一步包括:
将所述立体图像对的两个图像投影到屏幕上;以及
对于所述屏幕上的至少一个位置,通过测量照度和辉度中的至少一个来得到所述亮度差别信息。
6.根据权利要求3所述的方法,其中,通过基于投影系统的参数的计算来得到所述亮度差别信息。
7.根据权利要求1所述的方法,其中,在胶片和数字图像文件中的一个内提供所述立体图像对。
8.根据权利要求1所述的方法,进一步包括:
产生具有经历步骤(b)的亮度调整的至少第一立体图像集合的胶片。
9.根据权利要求1所述的方法,进一步包括:
创建具有经历步骤(b)的亮度调整的至少第一立体图像集合的数字图像文件。
10.根据权利要求1所述的方法,进一步包括:当正播放一个或多个数字图像时,对所述一个或多个数字图像实时执行步骤(b)。
11.用于在三维(3D)投影系统中投影的多个图像,包括:
第一图像集合和第二图像集合,来自所述第一图像集合的每个图像与来自所述第二图像集合的相关联图像形成立体图像对;
其中,所述第一图像集合和第二图像集合中的至少一个并入亮度调整,用于至少部分地补偿任意立体图像对的相应图像之间的亮度差别,所述亮度差别与所述投影系统相关联。
12.根据权利要求11所述的图像,被提供为胶片和数字文件中的一个。
13.根据权利要求11所述的图像,其中,基于以下中的至少一个来得到所述亮度调整:测量、估计和计算。
14.一种用于三维(3D)投影的系统,包括:
投影仪;
至少一个处理器,被配置为基于与所述投影仪相关联的亮度差别信息来建立亮度调整,并且将所述亮度调整应用于3D投影的一个或多个图像的至少一个区域。
15.根据权利要求14所述的系统,其中,在胶片和数字图像文件中的一个中提供所述立体图像。
16.根据权利要求15所述的系统,其中,所述至少一个处理器进一步被配置为:向所述胶片中的第一立体图像集合的至少一个区域应用所述亮度调整。
17.根据权利要求15所述的系统,其中,所述至少一个处理器进一步被配置为:播放所述数字图像文件。
18.根据权利要求17所述的系统,其中,所述至少一个处理器进一步被配置为:在播放所述数字图像文件之前向所述第一立体图像集合的至少一个区域应用所述亮度调整,或当播放所述数字图像文件时实时地向所述第一立体图像集合的至少一个区域应用所述亮度调整。
19.根据权利要求14所述的系统,其中,基于以下中的至少一个来得到所述亮度信息:测量、估计和计算。
20.根据权利要求19所述的系统,其中,所述至少一个处理器进一步被配置为:执行与立体图像的投影相关联的亮度差别的至少一个测量。
21.一种存储有指令的计算机可读介质,当由处理器执行时,所述指令将执行包括下述步骤的方法:
(a)获得用于减小立体图像对中的两个图像之间的亮度差别的亮度调整;以及
(b)将所述亮度调整应用于所述两个图像中的至少一个图像的至少一个区域。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US22359609P | 2009-07-07 | 2009-07-07 | |
| US61/223,596 | 2009-07-07 | ||
| US26128609P | 2009-11-13 | 2009-11-13 | |
| US61/261,286 | 2009-11-13 | ||
| PCT/US2010/001916 WO2011005316A1 (en) | 2009-07-07 | 2010-07-07 | Method and system for brightness correction for three-dimensional (3d) projection |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102484736A true CN102484736A (zh) | 2012-05-30 |
Family
ID=42797403
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010800396795A Pending CN102484736A (zh) | 2009-07-07 | 2010-07-07 | 用于三维(3d)投影的亮度校正的方法和系统 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20110007132A1 (zh) |
| EP (1) | EP2452505A1 (zh) |
| JP (1) | JP5775074B2 (zh) |
| KR (1) | KR101690743B1 (zh) |
| CN (1) | CN102484736A (zh) |
| CA (1) | CA2767387C (zh) |
| WO (1) | WO2011005316A1 (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106595481A (zh) * | 2016-12-14 | 2017-04-26 | 海信集团有限公司 | 激光投影系统的光斑测量方法及装置 |
| CN108513121A (zh) * | 2017-02-27 | 2018-09-07 | 意法半导体有限公司 | 用于场景的景深图评估的方法和设备 |
| CN108924530A (zh) * | 2017-03-31 | 2018-11-30 | 深圳市易快来科技股份有限公司 | 一种3d拍摄异常图像校正的方法、装置及移动端 |
| CN111857625A (zh) * | 2020-07-06 | 2020-10-30 | 山东金东数字创意股份有限公司 | 一种异形曲面矫正及边缘融合的方法 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7604348B2 (en) | 2001-01-23 | 2009-10-20 | Kenneth Martin Jacobs | Continuous adjustable 3deeps filter spectacles for optimized 3deeps stereoscopic viewing and its control method and means |
| US10742965B2 (en) | 2001-01-23 | 2020-08-11 | Visual Effect Innovations, Llc | Faster state transitioning for continuous adjustable 3Deeps filter spectacles using multi-layered variable tint materials |
| US9781408B1 (en) | 2001-01-23 | 2017-10-03 | Visual Effect Innovations, Llc | Faster state transitioning for continuous adjustable 3Deeps filter spectacles using multi-layered variable tint materials |
| WO2011029064A1 (en) * | 2009-09-04 | 2011-03-10 | University Of Virginia Patent Foundation | Hand-held portable fundus camera for screening photography |
| JP5395273B2 (ja) | 2010-09-08 | 2014-01-22 | パナソニック株式会社 | 立体画像処理装置、立体撮像装置、立体撮像方法およびプログラム |
| KR101232086B1 (ko) * | 2010-10-08 | 2013-02-08 | 엘지디스플레이 주식회사 | 액정표시장치 및 그의 로컬디밍 제어방법 |
| JP5565258B2 (ja) * | 2010-10-12 | 2014-08-06 | ソニー株式会社 | 画像処理装置、画像処理方法及びプログラム |
| KR101803571B1 (ko) * | 2011-06-17 | 2017-11-30 | 엘지디스플레이 주식회사 | 입체영상표시장치와 이의 구동방법 |
| KR20120139410A (ko) * | 2011-06-17 | 2012-12-27 | 삼성디스플레이 주식회사 | 입체 영상 표시 장치 및 그 구동 방법 |
| WO2013052542A1 (en) | 2011-10-03 | 2013-04-11 | Thomson Licensing | Method for crosstalk correction for 3d projection |
| KR101392340B1 (ko) * | 2012-05-04 | 2014-05-07 | 엘지디스플레이 주식회사 | 입체영상 표시장치와 그 구동방법 |
| JP6004354B2 (ja) * | 2012-06-15 | 2016-10-05 | パナソニックIpマネジメント株式会社 | 画像データ処理装置及び画像データ処理方法 |
| KR101436572B1 (ko) | 2012-07-19 | 2014-09-11 | (주) 인텍플러스 | 광삼각법을 이용한 3차원형상 측정장치 |
| US20130182086A1 (en) * | 2013-03-11 | 2013-07-18 | Allan Thomas Evans | Apparatus for enhancing stereoscopic images |
| US20140253698A1 (en) * | 2013-03-11 | 2014-09-11 | Allan Thomas Evans | System, apparatus, and method for enhancing stereoscopic images |
| US10303242B2 (en) | 2014-01-06 | 2019-05-28 | Avegant Corp. | Media chair apparatus, system, and method |
| US10409079B2 (en) | 2014-01-06 | 2019-09-10 | Avegant Corp. | Apparatus, system, and method for displaying an image using a plate |
| US10341637B1 (en) * | 2015-03-11 | 2019-07-02 | Facebook Technologies, Llc | Full frame uniformity across panels |
| US9823474B2 (en) | 2015-04-02 | 2017-11-21 | Avegant Corp. | System, apparatus, and method for displaying an image with a wider field of view |
| US9995857B2 (en) | 2015-04-03 | 2018-06-12 | Avegant Corp. | System, apparatus, and method for displaying an image using focal modulation |
| CN108804975A (zh) * | 2017-04-27 | 2018-11-13 | 丽宝大数据股份有限公司 | 唇彩指引装置及方法 |
| JP7379884B2 (ja) * | 2019-06-27 | 2023-11-15 | 株式会社リコー | 撮像装置、画像処理システム、方法およびプログラム |
| US11227520B1 (en) * | 2020-08-20 | 2022-01-18 | Microsoft Technology Licensing, Llc | Derivative-based encoding for scanning mirror timing |
| CN113034382B (zh) * | 2021-02-23 | 2024-04-30 | 深圳市创想三维科技股份有限公司 | 亮度均匀度调节方法、装置、计算机设备和可读存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7162074B2 (en) * | 2001-11-20 | 2007-01-09 | Fuji Jukogyo Kabushiki Kaisha | Adjusting apparatus for stereoscopic camera |
| CN101180873A (zh) * | 2005-04-26 | 2008-05-14 | 图象公司 | 电子投影系统及其方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2231548A (en) * | 1939-09-20 | 1941-02-11 | Technicolor Motion Picture | Method of projecting pictures |
| US4472037A (en) * | 1981-08-24 | 1984-09-18 | Stereographics Corporation | Additive color means for the calibration of stereoscopic projection |
| US4464028A (en) * | 1981-11-17 | 1984-08-07 | Condon Chris J | Motion picture system for single strip 3-D filming |
| US5136390A (en) * | 1990-11-05 | 1992-08-04 | Metavision Corporation | Adjustable multiple image display smoothing method and apparatus |
| US5481321A (en) * | 1991-01-29 | 1996-01-02 | Stereographics Corp. | Stereoscopic motion picture projection system |
| US6370265B1 (en) * | 1999-11-24 | 2002-04-09 | Direct Radiography Corp. | Method for generating gray scale transfer functions for use in displaying a digital radiogram |
| JP2002223454A (ja) * | 2001-01-26 | 2002-08-09 | Canon Inc | 投射型画像表示装置 |
| EP1337117A1 (en) * | 2002-01-28 | 2003-08-20 | Thomson Licensing S.A. | Stereoscopic projection system |
| US7559653B2 (en) * | 2005-12-14 | 2009-07-14 | Eastman Kodak Company | Stereoscopic display apparatus using LCD panel |
| US8164594B2 (en) * | 2006-05-23 | 2012-04-24 | Panasonic Corporation | Image processing device, image processing method, program, storage medium and integrated circuit |
| JP4462288B2 (ja) * | 2007-05-16 | 2010-05-12 | 株式会社日立製作所 | 映像表示装置及びそれを適用した3次元映像表示装置 |
| JP2009080144A (ja) * | 2007-09-25 | 2009-04-16 | Toshiba Corp | 立体映像表示装置および立体映像表示方法 |
| JP5532588B2 (ja) * | 2008-11-18 | 2014-06-25 | ソニー株式会社 | 画像表示装置および画像表示方法 |
| US8237777B2 (en) * | 2009-06-25 | 2012-08-07 | Eastman Kodak Company | Stereoscopic image intensity balancing in light projector |
-
2010
- 2010-07-07 CN CN2010800396795A patent/CN102484736A/zh active Pending
- 2010-07-07 EP EP10737648A patent/EP2452505A1/en not_active Ceased
- 2010-07-07 CA CA2767387A patent/CA2767387C/en not_active Expired - Fee Related
- 2010-07-07 JP JP2012519540A patent/JP5775074B2/ja not_active Expired - Fee Related
- 2010-07-07 WO PCT/US2010/001916 patent/WO2011005316A1/en active Application Filing
- 2010-07-07 US US12/803,791 patent/US20110007132A1/en not_active Abandoned
- 2010-07-07 KR KR1020127003261A patent/KR101690743B1/ko active IP Right Grant
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7162074B2 (en) * | 2001-11-20 | 2007-01-09 | Fuji Jukogyo Kabushiki Kaisha | Adjusting apparatus for stereoscopic camera |
| CN101180873A (zh) * | 2005-04-26 | 2008-05-14 | 图象公司 | 电子投影系统及其方法 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106595481A (zh) * | 2016-12-14 | 2017-04-26 | 海信集团有限公司 | 激光投影系统的光斑测量方法及装置 |
| CN106595481B (zh) * | 2016-12-14 | 2019-05-07 | 海信集团有限公司 | 激光投影系统的光斑测量方法及装置 |
| CN108513121A (zh) * | 2017-02-27 | 2018-09-07 | 意法半导体有限公司 | 用于场景的景深图评估的方法和设备 |
| US11138749B2 (en) | 2017-02-27 | 2021-10-05 | Stmicroelectronics Sa | Method and apparatus for depth-map estimation of a scene |
| US11915438B2 (en) | 2017-02-27 | 2024-02-27 | Stmicroelectronics France | Method and apparatus for depth-map estimation of a scene |
| CN108924530A (zh) * | 2017-03-31 | 2018-11-30 | 深圳市易快来科技股份有限公司 | 一种3d拍摄异常图像校正的方法、装置及移动端 |
| CN111857625A (zh) * | 2020-07-06 | 2020-10-30 | 山东金东数字创意股份有限公司 | 一种异形曲面矫正及边缘融合的方法 |
| CN111857625B (zh) * | 2020-07-06 | 2023-08-29 | 山东金东数字创意股份有限公司 | 一种异形曲面矫正及边缘融合的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2767387C (en) | 2018-01-02 |
| KR20120052286A (ko) | 2012-05-23 |
| WO2011005316A1 (en) | 2011-01-13 |
| US20110007132A1 (en) | 2011-01-13 |
| JP2012533214A (ja) | 2012-12-20 |
| EP2452505A1 (en) | 2012-05-16 |
| KR101690743B1 (ko) | 2016-12-28 |
| CA2767387A1 (en) | 2011-01-13 |
| JP5775074B2 (ja) | 2015-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102484736A (zh) | 用于三维(3d)投影的亮度校正的方法和系统 | |
| CN102484732B (zh) | 用于三维放映的干扰修正方法 | |
| JP5860842B2 (ja) | 電子投影システムおよび方法 | |
| US6532008B1 (en) | Method and apparatus for eliminating steroscopic cross images | |
| US9247233B2 (en) | Anagylphic stereoscopic image capture device | |
| JP5426773B2 (ja) | 3次元(3d)投影のためのクロストークおよび歪み補正の方法およびシステム | |
| CN102474631B (zh) | 三维(3d)投影的差分失真校正方法和系统 | |
| CN100520563C (zh) | 立体投影系统 | |
| CN102498721B (zh) | 用于三维(3d)投影的光学对准的方法和系统 | |
| US9591293B2 (en) | Stereoscopic field sequential colour display control | |
| CN102549476B (zh) | 三维投影的色彩校正的方法和系统 | |
| CN203909462U (zh) | 基于激光光源的双投影机3d投影装置及3d投影系统 | |
| CN103890638A (zh) | 用于图像投影的失真补偿 | |
| US20140225995A1 (en) | Method for crosstalk correction for 3d projection | |
| CN107911681A (zh) | 基于激光光源的双投影机3d投影装置及3d投影系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20120530 |