CN100504433C - 循环磁共振成像的系统和方法 - Google Patents
循环磁共振成像的系统和方法 Download PDFInfo
- Publication number
- CN100504433C CN100504433C CNB038221012A CN03822101A CN100504433C CN 100504433 C CN100504433 C CN 100504433C CN B038221012 A CNB038221012 A CN B038221012A CN 03822101 A CN03822101 A CN 03822101A CN 100504433 C CN100504433 C CN 100504433C
- Authority
- CN
- China
- Prior art keywords
- volumes
- sub
- magnetic resonance
- imaging
- predefined paths
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- High Energy & Nuclear Physics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
本发明提供一种方法和磁共振成像设备,在这里,在病人连续地通过由磁场提供的成像体积移动的同时进行循环的图像数据获取。将成像体积细分成子体积。对于各个子体积依次进行图像数据获取。通过真正的三维成像或者通过多切片成像方法实现对于指定子体积的数据获取,在这里的子体积包括一个叠层的两维切片。与病人一起移动实现图像数据获取的子体积,使其通过磁场。当已经完成这个子体积的图像数据获取时,对于随后的子体积开始下一个图像数据获取。
Description
技术领域
本发明涉及磁共振成像(MRI)领域,更加具体地说,本发明涉及当一个受检者连续移动通过磁场时的磁共振成像。
背景技术
在许多医学诊断过程中,期望产生或者甚至于必须产生一个相当大的受检者体积的图像表示。美国专利No.5423315表示出一个磁共振成像系统,它利用一个薄的圆环形的均匀场体积(uniform fieldvolume),通过连续地移动受检者使其通过圆环形均匀场体积能够产生细长的受检者部分的三维诊断图像。为此目的,要按照病人的通过均匀场体积的移动来改变射频频率。当病人沿均匀场体积移动时,线性地改变射频脉冲的频率,以使所选的切片位置相对于(移动中的)病人保持不变。
这种现有技术的方法从图像处理角度看是有缺点的。另一个缺点是,数据获取所需的时间相当地长。
因此,本发明的一个目的是提供用于磁共振成像的改进的方法、计数机程序产品、和设备。
发明内容
本发明提供一种磁共振成像的改进方法,所说的方法能在受检者连续地通过由磁场提供的成像体积的同时进行循环图像数据获取。该循环图像数据的获取覆盖通过成像体积移动的至少两个相继的子体积。对于一个子体积的数据获取是通过真正的三维成像或者通过多切片成像方法实现的,在多片成像方法中一个子体积包含一堆两维切片。
按照本发明,受检者沿着预定的路径通过成像体积移动。通常,预定路径是一个直线。在具有环形磁铁的磁共振系统中,通常采用的是这样一种直线。在另一个实施例中,所说预定路径可能是弯曲的。在例如具有C形磁铁的所谓的开路磁共振系统中,使用这样一种弯曲的预定路径。
进而,可以确定子体积的取向,以使预定路径(主要是直线的预定路径)基本上垂直于子体积。按照另一种方式,可以确定子体积的取向,以使它相对于预定路径是倾斜的。例如在磁共振心脏应用中,子体积最好是相对于预定路径倾斜的,以便将受检者的心脏相对于人体的主轴的取向考虑在内。
按照本发明的优选实施例,磁共振图像数据获取的分辨率形成确定受检者通过磁场移动的速度的基础。
按照本发明的另一个优选实施例,使用平行成像技术来增加图像数据获取的速度.这就能相应地增加受检者的移动速度.最好使用平行成像技术,平行成像技术基于通过多个接收通道实现同时接收。优选地,使用SENSE型平行成像技术(“SENSE”:对于快速磁共振成像的灵敏度编码,KlassP.Pruessmann等人,“在医学中的磁共振”42:952-962(1999))。
附图说明
下面参照附图更加详细地描述本发明的优选实施例,其中:
图1表示具有按照本发明的方法的一个实施例编程的控制单元的一个磁共振设备;
图2说明循环磁共振成像数据获取的方法;
图3说明的是三维成像;
图4-6说明子体积的三维图像数据获取;
图7-9说明随后的子体积的三维图像数据获取;
图10说明循环多切片成像。
具体实施方式
图1表示一个磁共振设备1,磁共振设备1包括:第一磁铁系统2,用于产生一个稳定磁场;以及,几个梯度线圈3,用于产生在X、Y、Z方向具有梯度的附加磁场。图中所示的坐标系的Z方向按照习惯作法对应于在磁铁系统2中的稳定磁场的方向。可以选择将要使用的测量坐标系x、y、z,使其独立于如图1所示的X、Y、Z系统。梯度线圈是通过电源单元4提供的。射频发射器线圈5用于产生射频磁场,并且连接到射频发射器和调制器6。
使用一个接收器线圈来接收磁共振信号,所说的磁共振信号是由要考察的对象7(如人或动物的身体)中的射频场产生的。这个接收器线圈可以是与射频发射器线圈5相同的线圈。此外,磁铁系统2封闭考察空间,考察空间要足够大以容纳要考察的人体7的一部分。射频线圈5安排在这个考察空间中要考察的人体7的一部分的周围或在它的上面。射频发射器线圈5经过一个发射/接收电路9连接到信号放大器和调制器单元10。
控制单元11控制射频发射器和调制器6以及电源单元4,以产生包含射频脉冲的特定脉冲序列和梯度。将从解调制单元10获得的相位和幅度加到处理单元12。处理单元12处理所提供的信号值,以形成通过变换得到的图像。例如借助于监视器13可以观察这个图像。
优选地,磁共振设备1具有多接收器线圈,用于通过多接收通道进行同时接收。这样一种安排可以实现某些平行成像技术(如SENSE)的应用。
用于平行成像技术的接收线圈由多个元件或通道组成,每个元件或通道的操作或多或少是独立进行的,并且对于视场(FOV)的不同分段是敏感的。这些线圈通常与分开的、较大的发射线圈结合起来进行操作,在整个视场上具有均匀的激励分布。多通道接收线圈的一个重要的优点是如下的事实:多通道接收线圈可提供大的信号噪声比,并且当与平行成像技术结合使用时,多通道接收线圈有利于使用单个短程磁共振成像技术,如利用类似漫射成像的EPI和BOLD功能成像。“一种用于脑部成像的SENSE优化的高灵敏度磁共振成像接收线圈的设计”(Jacco A.de Zwart等人,“在医学中的磁共振”47:1218-1227,(2002))表示出用于这样一种平行成像技术的多通道线圈的设计。
图2说明在连续移动的病人身上实现循环磁共振图像数据获取的流程图。在步骤200,在由磁场提供的成像体积内,选择第一子体积j,同时病人沿直线通过这个成像体积连续移动。这个子体积随病人一起移动通过这个成像体积,以使子体积和病人的相对位置保持不变。需要选择图像数据获取的参数,即,移动的速度、成像体积的大小、子体积的大小、和分辨率,以使成像体积内的子体积移动时间足以以期望的分辨率实现磁共振图像数据获取。
在步骤202,实现这个子体积的磁共振图像数据获取,同时这个子体积通过成像体积移动。为此目的,使用三维图像数据获取方法或者使用多切片成像方法来实现。下面将要分别参照图3-9、10对此进行更加详细的说明。
当已经完成子体积j的数据获取的时候,在步骤204下标(index)j加1,并且控制返回到步骤200。在步骤200,选择随后的一个子体积,即选择前一个子体积的相邻子体积。对于这个子体积j,在步骤202完成另一个数据获取步骤,并且在步骤204,j再一次加1,等等。
这个过程继续下去,一直到已经获得病人身体的感兴趣的部分的所有的图像数据为止。
本发明的一个特殊的优点是,病人通过磁场移动的速度相当高,并且磁场可以相当地小。这样就增加了在图像数据获取期间病人的舒服感,因为消除或者减小了心理学的“隧道效应”,隧道效应可能是由病人逗留在磁孔内引起的。
通过应用平行成像技术,如SENSE,可进一步提高图像获取的速度,因此可提高移动速度。
图3说明三维成像的情况。在由磁共振设备(参照图1的磁共振设备1)的磁芯提供的磁场内,形成均匀的成像体积。成像体积300在径向方向被认为是均匀的,并且沿病人支撑床302移动方向均匀地被截断。在环形磁铁中,这称之为z方向。
在这里考察的例子中,病人身体的一部分304将要成像。为了实现这种成像,确定覆盖部分304的子体积的一个序列或者所谓的“切片”j。在这里考虑的例中,切片的数目为9,j=1到j=9。
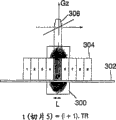
为了实现磁共振图像数据获取,选择刚刚进入成像体积300的的一个切片,即,在这里所考虑的例中,切片j=5。对于切片j=5,为了实现磁共振图像数据获取,施加一系列梯度脉冲306,同时切片j=5沿床的移动方向与沿直线移动的病人一起移动,所说的直线是由病人支撑302和z轴确定的。
换言之,有效的切片j=5沿一条直线通过成像体积300移动,移动的速度与病人相同,同时对于这个切片j=5执行三维数据获取。当对于切片j=5的数据获取已经完成的时候,选择随后的切片j=6,以便相对于这个随后的切片j=6实现磁共振图像数据获取。
因此,使用了一种三维方法实现了成像,其中,在对于切片进行数据获取的开始,从所说的部分304上并且在成像体积300的一侧选择了厚度为L的一个切片。要说明的是,成像体积300的大小需要至少是L的两倍,以便能够容纳两个随后的子体积以实现连续的(seemless)和无中断的数据获取。
优选地,三维扫描利用了两个相位编码轴和一个频率编码轴。按照这种方法优选的是,频率编码方向在LR(x)方向,相位编码方向在AP(y)和HF(z)方向,HF方向就是病人支撑的移动方向。
例如,假定在z方向要覆盖的总视场(FOV)是45cm。在9个切片上要进行数据获取,每个切片的厚度为L=5cm。如果沿z方向的最终的矩阵的大小为225个像素,则每个切片将覆盖25个像素,每个像素的分辨率为2mm。
本发明的循环的和连续的数据获取方法有一系列优点:
在第一切片和最后的切片,只有一个床的起动和停止周期,在切片获取之间没有任何附加的时间延迟。一旦开始移动,保持床以恒定的速率移动也很容易,因此可减小对于床位置的准确消息的要求。
床移动的同时,通过“跟踪”正在成像的切片,可以实现利用连续的床移动的数据获取。换言之,在所选的切片内的每个编码步骤都是在相对于均匀体积的逐渐增加的不同的台位置实现的,并且切片的选择也是严格地遵循所说的台位置进行的。因为所选的切片随所说的台一起移动,所以在每个kz编码步骤或者甚至于在每个TR,都要更新切片位置,以便总可以激发相对于不断延伸的目标的同一个所选的切片,而与相对于均匀体积的床和目标的位置无关。
当沿切片方向进行相位编码时,一个附加的要求是需要舍弃零级相位误差,所说的零级相位误差是由于下述的事实积累的:每个z相位编码步骤是切片在相对于梯度系统的不同位置发生的.通过在合成器中增加一个附加相位偏差可以对于零级相位积累进行校正,合成器在接收时可以消除积累的相位。从切片相对于相同中心(iso-center)的位置可以确定这个增加相位偏差的值,这个附加相位偏差与每个切片偏差需要的频率偏差类似。
床的速度是由获取整个切片(ky编码×kz编码)和切片厚度L所需的时间确定。假定,均匀体积在z方向至少是切片厚度L的两倍,因此切片可以横向穿过这个均匀区域以使它的最终位置移动了一个完整切片厚度。可以自由地选择在每个循环内编码步骤的顺序(例如直线的或同心的)。床的位置、以及切片的位置(与床一致)或者随kz的每个增加(假定kz是最外边的循环)而增加,或者随每个TR的增加而增加。当对于每个TR更新切片位置时,可以选择任何循环顺序(z中的y,反之亦然)。所以,对于厚度为L的切片,穿行距离L所需的时间是M(ky)×M(kz)×TR,在这里,M(ky)和M(kz)分别是每个切片的y和z编码步骤的数目。
在当前的切片最终移动了L的时候,对于这个切片就获得了所有的kz编码。然后,在相对于均匀体积的原始切片位置将再一次开始该获取。由于床的移动是连续的,所以在均匀体积内存在延伸的目标的一个不同的部分(下一个相继的切片).由于切片跟踪,数据获取连续进行,同时这个切片还横向穿过均匀体积,一直到它也移动了一个切片厚度L时为止。这个循环重复进行,一直到所有的切片已经通过均匀体积时为止。
在图4-9中针对两个相继的切片j=5和j=6详细描述这个循环过程。图4、5、6说明对于切片j=5在时间TR的增量为i时的数据获取过程,在这里i=m×n。
在图6所示的位置,对于切片j=5的数据获取已经完成,因而对于图7、8、9所示的随后的数据获取,选择随后的切片j=6。
下面对于切片厚度L=5cm,这里的N(kz)=25和M(ky)=256,描述一个应用实例。对于每个切片256×256×25的最终的矩阵大小,8ms的TR是可能的,其中包括运动补偿。每个切片的总的时间约为50秒,每个kz编码步骤的时间是每个步骤2秒(256个ky编码步骤的时间)。在这种情况下,跟踪的切片选择位置可能需要至少2秒更新一次。在50秒之内横向穿过5cm所需的床的速度是每秒0.1cm(1mm/秒)。这样,覆盖9个站(256×256×225矩阵)所需的总时间是450秒,即,7分30秒。这是一个相当长的时间。然而,如果想要成像整个45cm的总的视场,在采取正常的措施(如扫描)的条件下,也要花同样长的时间。
采用较少的ky编码步骤是可能的,因为人的身体在AP方向本来就是细长的。此外,使用合适的射频线圈,在AP方向还可能利用SENSE。与ky编码步骤的数目从256减小到192相对应的SENSE减小因子2可能导致只有256×96×25×9站的总获取矩阵,这个总获取矩阵将在总的获取时间2分50秒产生的图像矩阵大小为256×192×225。在这种情况下,床的速度可能增加到约为2.5mm/秒(在19秒中内5cm),并且跟踪的切片位置至少每768毫秒更新一次。
跟踪的切片位置作为ky×kz的总下标i的函数(例如i=m×n)是不断增加的。这个下标的范围从0到2400(如96×25)。换言之,切片的位置对于每个TR是连续变化的,因此可准确地跟踪床的位置。必须在2400个步骤中移动5cm的厚度为5cm的切片每个TR可能要移动21微米。
这个均匀区域沿z方向的大小对于这个方法的效率并不重要。获取时间纯粹只由TR和最终的矩阵大小来决定。这个方法的一个限制是,台的移动方向必须总是沿切片的选择轴以及编码方向的一个轴的方向。然而,这种方法从与标准的三维成像相同的信号噪声比优点中受益,并且与所有的三维获取方法兼容,其中包括FFE、B-FFB、TSE、GRASE、和EPI。
图10表示一个可替换的实施例,它采用的是多片数据获取技术。在此例中,细分每个切片使之成为一系列两维切片308来实现三维数据获取。这通过梯度脉冲序列310来反映。
在这种情况下,引入z相位编码,并且产生两维叠层的中心以跟踪台的位置。切片的一个两维叠层一旦横向穿过均匀体积,就可以利用下一个连续的叠层来获取数据,获取的方式与三维的情况十分相似。
多个叠层的两维方法是有益的,因为它准确地模拟了正常的情况,这里没有利用床的移动。当多个叠层连接(concatenated)时,各个切片之间的过渡也不太容易出错。由于引入了z相位编码,所以扫描时间很可能加快,当然,沿z方向的分辨率要受到在叠层内每个切片的厚度的限制。
要说明的是,本发明的特殊优点是,它可能在环形磁铁内利用沿z方向短达10cm的均匀体积成像至少45cm的从头到脚(HF)的视场(FOV)。借助于床的连续移动、三维数据获取、和连续的循环切片跟踪,有可能在相同的扫描时间内实现这种情况,所说的这个扫描时间是在想要利用整个视场的条件下可能需要的。借助于三维获取,信号噪声比(SNR)性能要比利用薄切片获取的其它的磁共振移动床方法好得多。
所示的这项技术还必须与多叠层两维获取技术兼容,在多叠层两维获取技术中每个三维体积只是简单地由两维切片的一个叠层来代替。
这种方法与所有的两维的和三维的磁共振获取方法都兼容,其中包括FFE、B-FFE、TSE、GRASE、BPI、和螺旋/径向导数.
要说明的是,虽然病人和子体积通过成像体积的移动是连续的,但在实现数据获取的同时这个移动的速度有可能改变.
编号列表
磁共振设备 1
磁铁系统 2
梯度线圈 3
电源单元 4
发射器线圈 5
调制器 6
对象 7
发射/接收电路 9
解调制器单元 10
控制单元 11
处理单元 12
监视器 13
成像体积 300
病人支撑 302
部分 304
梯度脉冲 306
切片 308
梯度脉冲序列 310
Claims (17)
1.一种磁共振成像方法,包括如下步骤:
在一个成像体积内提供磁场;
沿预定路径连续移动一个受检者;
确定成像体积中的子体积,所述子体积与受检者一起移动,对所述子体积这样进行选择,以使子体积在成像体积内的移动时间足以以预定的分辨率实现磁共振图像数据获取,其中所述子体积包括一组沿预定路径层叠的切片;
对于这个子体积的切片组执行磁共振多切片数据获取的步骤;
确定随后的子体积,随后的子体积在预定路径上与所述子体积相邻,该随后的子体积与受检者一起移动,对所述随后的子体积这样进行选择,以使所述随后的子体积在成像体积内的移动时间足以以预定的分辨率实现磁共振图像数据获取,其中所述随后的子体积包括进一步的一组沿预定路径层叠的切片,并且随后对于这个随后的子体积中的进一步的切片组执行磁共振多切片数据获取的进一步步骤。
2.根据权利要求1所述的方法,其中为了与所述受检者一起移动所述子体积,使用所述切片组的中心来跟踪台的位置。
3.根据权利要求2所述的方法,其中使用了三维成像方法用于所述对于这个子体积执行磁共振图像数据获取的步骤。
4.根据前述权利要求1、2、或3中任何一个所述的方法,子体积沿预定路径的延伸长度为5cm。
5.根据权利要求1所述的方法,移动速度在每秒1mm和2.5mm之间。
6.根据权利要求1所述的方法,其中,通过平行成像技术实现磁共振图像数据获取。
7.根据权利要求6所述的方法,其中,使用SENSE类型的平行成像技术。
8.根据权利要求1所述的方法,磁共振图像数据获取是循环重复进行的,其中对于每一个子体积进行一次重复。
9.根据权利要求1所述的方法,所述子体积沿预定路径具有第一延伸长度,成像体积沿预定路径具有第二延伸长度,第二延伸长度是第一延伸长度的至少两倍。
10.一种磁共振成像设备,包括:
在一个成像体积内提供磁场的装置;
沿预定路径连续移动一个受检者的装置;
控制单元,用于为成像体积的一个子体积中包含的切片组内的磁共振多切片数据获取产生控制信号,所述子体积与受检者一起沿预定路径移动,其中所述子体积包括一组沿预定路径层叠的切片,这样选择所述子体积以使所述子体积在成像体积内的移动时间足以以预定的分辨率实现磁共振图像数据获取,并且足以在一个随后的子体积内实现随后的磁共振图像数据获取,所述随后的子体积在预定路径上与所述子体积相邻,这样选择所述随后的子体积,以使所述随后的子体积在成像体积内的移动时间足以以预定的分辨率进行磁共振图像数据获取,其中所述随后的子体积包括进一步的一组沿预定路径层叠的切片。
11.根据权利要求10所述的磁共振成像设备,所述移动受检者的装置适合于以每秒1-2.5mm的移动速度移动受检者。
12.根据权利要求10或11所述的磁共振成像设备,进一步还包括:基于通过多接收通道的同时接收的用于平行成像技术的装置。
13.根据权利要求10所述的磁共振成像设备,控制单元适合于执行磁共振图像数据获取的循环重复。
14.根据权利要求10所述的磁共振成像设备,所述子体积沿预定路径具有第一延伸长度,成像体积沿预定路径具有第二延伸长度,第二延伸长度是第一延伸长度的至少两倍。
15.根据权利要求10所述的磁共振成像设备,所述预定路径是直线,所述提供磁场的装置包括环形磁铁。
16.根据权利要求10所述的磁共振成像设备,所述预定路径是弯曲的,所述提供磁场的装置包括开路的磁共振系统。
17.根据权利要求16所述的磁共振成像设备,所述开路的磁共振系统是C形磁铁。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP02078870.9 | 2002-09-18 | ||
| EP02078870 | 2002-09-18 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1682127A CN1682127A (zh) | 2005-10-12 |
| CN100504433C true CN100504433C (zh) | 2009-06-24 |
Family
ID=32010991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB038221012A Expired - Fee Related CN100504433C (zh) | 2002-09-18 | 2003-08-08 | 循环磁共振成像的系统和方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7496396B2 (zh) |
| EP (1) | EP1543340B1 (zh) |
| JP (1) | JP4490819B2 (zh) |
| CN (1) | CN100504433C (zh) |
| AT (1) | ATE448489T1 (zh) |
| AU (1) | AU2003253151A1 (zh) |
| DE (1) | DE60330027D1 (zh) |
| WO (1) | WO2004027443A1 (zh) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2156206A1 (en) * | 2007-05-31 | 2010-02-24 | Koninklijke Philips Electronics N.V. | Method of automatically acquiring magnetic resonance image data |
| WO2011106649A1 (en) * | 2010-02-25 | 2011-09-01 | Mcw Research Foundation, Inc. | Method for simultaneous multi-slice magnetic resonance imaging using single and multiple channel receiver coils |
| WO2012023559A1 (ja) * | 2010-08-16 | 2012-02-23 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| KR102001063B1 (ko) * | 2012-11-14 | 2019-07-17 | 삼성전자주식회사 | 자기공명영상 시스템 및 자기공명영상 방법 |
| EP4115791A1 (en) * | 2013-02-01 | 2023-01-11 | DEKA Products Limited Partnership | Endoscope with pannable camera |
| EP3699623B1 (en) * | 2019-02-25 | 2022-02-23 | Siemens Healthcare GmbH | Multi-slice magnetic resonance imaging |
| CN110865322B (zh) * | 2019-11-27 | 2021-08-24 | 上海东软医疗科技有限公司 | 用于磁共振成像的水脂分离方法、装置、存储介质及设备 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3124435A1 (de) | 1981-06-22 | 1983-01-20 | Siemens AG, 1000 Berlin und 8000 München | Geraet zur erzeugung von bildern eines untersuchungsobjektes |
| US4791371A (en) * | 1986-11-17 | 1988-12-13 | Memorial Hospital For Cancer And Allied Diseases | Apparatus useful in magnetic resonance imaging |
| DE3938370A1 (de) * | 1989-11-18 | 1991-05-23 | Philips Patentverwaltung | Kernspintomographieverfahren und kernspintomograph zur durchfuehrung des verfahrens |
| EP0507391B1 (en) * | 1991-04-02 | 1998-06-10 | Koninklijke Philips Electronics N.V. | Magnetic resonance imaging method and device for monitoring motion of a part of an object based on stimulated echoes. |
| DE4329922A1 (de) * | 1993-09-04 | 1995-03-09 | Philips Patentverwaltung | MR-Abbildungsverfahren und Anordnung zur Durchführung des Verfahrens |
| US5423315A (en) * | 1993-11-22 | 1995-06-13 | Picker International, Inc. | Magnetic resonance imaging system with thin cylindrical uniform field volume and moving subjects |
| US6311082B1 (en) * | 1997-11-12 | 2001-10-30 | Stereotaxis, Inc. | Digital magnetic system for magnetic surgery |
| JP3702106B2 (ja) * | 1998-09-29 | 2005-10-05 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| GB2345139A (en) * | 1998-12-24 | 2000-06-28 | Marconi Electronic Syst Ltd | MRI apparatus with continuous movement of patient |
| DE19903029B4 (de) * | 1999-01-26 | 2005-10-06 | Siemens Ag | Magnetresonanz-Bildgebungsverfahren |
| US6064290A (en) * | 1999-05-21 | 2000-05-16 | The Board Of Trustees Of The Leland Stanford Junior University | Short bore-length asymmetric electromagnets for magnetic resonance imaging |
| GB2355799B (en) * | 1999-10-26 | 2004-02-04 | Oxford Magnet Tech | Magnet with improved access |
| JP2001198100A (ja) * | 2000-01-20 | 2001-07-24 | Ge Medical Systems Global Technology Co Llc | Mrデータ収集方法、mr画像表示方法およびmri装置 |
| US6717406B2 (en) * | 2000-03-14 | 2004-04-06 | Beth Israel Deaconess Medical Center, Inc. | Parallel magnetic resonance imaging techniques using radiofrequency coil arrays |
| US6879852B1 (en) * | 2000-07-10 | 2005-04-12 | Otward M. Mueller | Low-cost magnetic resonance imaging (MRI) Cryo-system |
| JP4515616B2 (ja) * | 2000-09-25 | 2010-08-04 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| US6801034B2 (en) * | 2001-03-30 | 2004-10-05 | General Electric Company | Method and apparatus of acquiring large FOV images without slab-boundary artifacts |
| US6897655B2 (en) * | 2001-03-30 | 2005-05-24 | General Electric Company | Moving table MRI with frequency-encoding in the z-direction |
| US6912415B2 (en) * | 2001-04-09 | 2005-06-28 | Mayo Foundation For Medical Education And Research | Method for acquiring MRI data from a large field of view using continuous table motion |
| US6714010B2 (en) * | 2001-04-20 | 2004-03-30 | Brigham And Women's Hospital, Inc. | Combining unfold with parallel magnetic resonance imaging |
| US7054675B2 (en) * | 2002-01-30 | 2006-05-30 | Ge Medical Systems Global Technology Company, Llc | Customized spatial saturation pulse sequence for suppression of artifacts in MR images |
-
2003
- 2003-08-08 AT AT03797401T patent/ATE448489T1/de not_active IP Right Cessation
- 2003-08-08 US US10/528,397 patent/US7496396B2/en not_active Expired - Fee Related
- 2003-08-08 DE DE60330027T patent/DE60330027D1/de not_active Expired - Lifetime
- 2003-08-08 EP EP03797401A patent/EP1543340B1/en not_active Expired - Lifetime
- 2003-08-08 WO PCT/IB2003/003542 patent/WO2004027443A1/en active Application Filing
- 2003-08-08 CN CNB038221012A patent/CN100504433C/zh not_active Expired - Fee Related
- 2003-08-08 JP JP2004537362A patent/JP4490819B2/ja not_active Expired - Fee Related
- 2003-08-08 AU AU2003253151A patent/AU2003253151A1/en not_active Abandoned
Non-Patent Citations (2)
| Title |
|---|
| SENSE:Sensitivity Encoding for Fast MRI. Klaas P.Pruessmann,MarkusWeiger,MarkusB.Scheidegger,Peter Boesiger.Magnetic Resonance in Medicine,Vol.42 No.5. 1999 |
| SENSE:Sensitivity Encoding for Fast MRI. Klaas P.Pruessmann,MarkusWeiger,MarkusB.Scheidegger,Peter Boesiger.Magnetic Resonance in Medicine,Vol.42 No.5. 1999 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4490819B2 (ja) | 2010-06-30 |
| CN1682127A (zh) | 2005-10-12 |
| US7496396B2 (en) | 2009-02-24 |
| DE60330027D1 (de) | 2009-12-24 |
| ATE448489T1 (de) | 2009-11-15 |
| JP2005538795A (ja) | 2005-12-22 |
| US20050251022A1 (en) | 2005-11-10 |
| EP1543340A1 (en) | 2005-06-22 |
| EP1543340B1 (en) | 2009-11-11 |
| WO2004027443A1 (en) | 2004-04-01 |
| AU2003253151A1 (en) | 2004-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7009396B2 (en) | Method and system for extended volume imaging using MRI with parallel reception | |
| US7573269B2 (en) | Method and apparatus for acquiring magnetic resonance imaging data | |
| US6891374B2 (en) | Moving table MRI with frequency-encoding in the z-direction | |
| US8841911B2 (en) | RF coil assembly for MRI using differently shaped and/or sized coils | |
| US8334692B2 (en) | Simultaneous multinuclear magnetic resonance imaging | |
| US8076938B2 (en) | System and method of parallel imaging with calibration to a virtual coil | |
| CN102576061B (zh) | 使用多通道rf激励进行mr成像 | |
| US6584337B2 (en) | Method and system for extended volume imaging using MRI | |
| CN104781685A (zh) | 用于使用非相干采样和冗余haar子波的动态磁共振成像的图像重建 | |
| CN104833931A (zh) | 用于控制磁共振成像系统的方法和装置 | |
| US6801034B2 (en) | Method and apparatus of acquiring large FOV images without slab-boundary artifacts | |
| CN105103001A (zh) | 使用高snr同相图像和较低snr至少部分地异相图像的dixon型水/脂肪分离mri | |
| JP2015128585A (ja) | 磁気共鳴生データの再構成方法および装置 | |
| US10281542B2 (en) | Magnetic resonance imaging system and method | |
| KR101754597B1 (ko) | 코일들을 위한 자동 hf 심 구성 | |
| CN103782184A (zh) | Rf阵列线圈/天线阻抗的动态修改 | |
| KR101655126B1 (ko) | 자기 공명 제어 시퀀스의 결정 | |
| CN100504433C (zh) | 循环磁共振成像的系统和方法 | |
| US7821265B2 (en) | Method and apparatus for acquiring MRI data for pulse sequences with multiple phase encode directions and periodic signal modulation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090624 Termination date: 20150808 |
|
| EXPY | Termination of patent right or utility model |