CN100443351C - 小型六履带全地形移动机器人 - Google Patents
小型六履带全地形移动机器人 Download PDFInfo
- Publication number
- CN100443351C CN100443351C CNB2007101177390A CN200710117739A CN100443351C CN 100443351 C CN100443351 C CN 100443351C CN B2007101177390 A CNB2007101177390 A CN B2007101177390A CN 200710117739 A CN200710117739 A CN 200710117739A CN 100443351 C CN100443351 C CN 100443351C
- Authority
- CN
- China
- Prior art keywords
- swing arm
- sprocket wheel
- lateral
- wheel
- side board
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Manipulator (AREA)
Abstract
本发明小型六履带全地形移动机器人涉及一种能够在复杂路面机动行驶,具有较高越障能力的地面移动机器人;该机器人包括两套行走驱动装置、四套摆臂组件以及机身框架;机器人两条行走履带左右对称布置,覆盖了机器人机身框架的上、下、前、后表面,驱动电机、控制系统以及动力电源都包含在被行走履带覆盖的机身框架内;机器人前后端各安装了两个左右对称布置的摆臂,摆臂履带与行走履带的线速度相同,在翻越障碍时,四个摆臂可以起到支撑、攀附的作用;机器人行走履带在带宽方向采用了阶梯形状齿形,以适应不同路面;由于周身覆盖履带,以及四条摆臂可灵活摆动,该机器人具有极高的越野机动能力。
Description
技术领域
本发明属于地面移动机器人技术领域,具体涉及一种能够在崎岖路面或复杂地形条件下机动行驶,具有较高机动性和较强越障力的小型六履带全地形移动机器人。
背景技术
地面移动机器人已有数十年的发展历史,在当今社会生活的各个领域都有着广泛的应用,如军事侦察、排爆、危险品探测、灾害救援等等。该类机器人的基本驱动方式通常采用轮式、履带式或轮履复合式。按照传统的设计思路,现有移动机器人的机动灵活性和越障能力较差,在通过崎岖路面和翻越障碍时,经常会发生机器人底盘被碎石、突缘卡住的现象,部分机器人采用了摆臂来抬升躯体、翻越障碍,但是这种方法费时费力,降低了移动机器人的机动速度和消耗了其有限的能源。因此,要克服现有移动机器人机动能力上固有的缺陷,需要从移动机器人行走机理和驱动方式上寻求突破。
发明内容
本发明提供一种能够在崎岖路面或复杂地形条件下机动行驶,具有较高机动性和较强越障力的小型六履带全地形移动机器人,目的是在保证机器人尺寸限制的同时,克服传统履带式移动机器人底盘经常与障碍发生碰撞的缺点,提高机器人的机动能力,为小型履带式地面移动机器人结构布局提供新的设计方案和新的技术途径。
为解决上述技术问题本发明采用的技术方案是:一种小型六履带全地形移动机器人,包括两套行走驱动装置、四套摆臂组件以及机身框架。机器人左行走履带与右行走履带左右对称布置,覆盖了机器人机身框架的上、下、前、后表面,驱动电机、控制系统以及动力电源都包含在被左行走履带和右行走履带覆盖的机身框架内;左前摆臂驱动装置和右前摆臂驱动装置安装在机器人前端左右两侧,左后摆臂驱动装置和右后摆臂驱动装置安装在机器人后端左右两侧;左行走驱动装置和右行走驱动装置都位于左前摆臂驱动装置和右前摆臂驱动装置的内侧;左前摆臂履带、左后摆臂履带与左行走履带的线速度相同,右前摆臂履带、右后摆臂履带与右行走履带的线速度相同,在翻越障碍时,四个摆臂可以起到支撑、攀附的作用;机器人上部还装有承载平台,可用于安装各种设备附件。
所述左行走驱动装置包括左行走驱动电机、左行走链传动系、左小齿轮、左小轴、左大齿轮、左前主轴、左前内行走链轮、左前外行走链轮和左行走履带。左行走驱动电机固定在机身左侧板内侧,且其输出轴穿过左侧板;左行走链传动系将电机转动传递给固定在左小轴上的左小齿轮,左小齿轮再将转动传递给固定在左前主轴上左前内行走链轮、左前外行走链轮中间的左大齿轮,从而带动左前内行走链轮和左前外行走链轮转动;左前内行走链轮和左前外行走链轮与左行走履带内侧的链条啮合,带动履带转动,实现机器人的行走功能。所述右行走驱动装置包括右行走驱动电机、右行走链传动系、右小齿轮、右小轴、右大齿轮、右前主轴、右前内行走链轮、右前外行走链轮和右行走履带。右行走驱动电机固定在机身右侧板内侧,且其输出轴穿过右侧板;右行走链传动系将电机转动传递给固定在右小轴上的右小齿轮,右小齿轮再将转动传递给固定在右前主轴上右前内行走链轮、右前外行走链轮中间的右大齿轮,从而带动右前内行走链轮和右前外行走链轮转动;右前内行走链轮和右前外行走链轮与右行走履带内侧的链条啮合,带动履带转动,实现机器人的行走功能。
所述左前摆臂驱动装置包括左前摆臂电机、左前摆臂驱动链轮、左前内轴套、左前外轴套、左前摆臂杆、左前摆臂小轴、左前内摆臂小链轮、左前外摆臂小链轮、左前内摆臂大链轮和左前外摆臂大链轮;左前摆臂大链轮安装在左前摆臂杆前端的左前摆臂小轴上;左前内轴套、左前摆臂驱动链轮、左前外轴套和左前摆臂杆依次通过螺栓串接固连在一起,并通过轴承套接在左前主轴上,其中左前内轴套穿过机身左侧板,两者之间套有轴承,这样可以保证左前摆臂相对于左前主轴和机身左侧板自由转动;左前摆臂电机固定在机身左侧板内侧,且其输出轴穿过左侧板;左前摆臂电机通过链传动带动左前摆臂驱动链轮转动,从而带动左前摆臂杆转动,进而完成机器人左前摆臂的转动;左前内摆臂小链轮和左前外摆臂小链轮与左前内行走链轮外径相同,且通过键连接套接在左前主轴外端,与左前主轴同步转动,因此左前内摆臂小链轮和左前外摆臂小链轮可带动左前摆臂履带与左行走履带保持相同的线速度;左前摆臂驱动装置与左前摆臂履带组成左前摆臂组件。所述右前摆臂驱动装置包括右前摆臂电机、右前摆臂驱动链轮、右前内轴套、右前外轴套、右前摆臂杆、右前摆臂小轴、右前内摆臂小链轮、右前外摆臂小链轮、右前内摆臂大链轮和右前外摆臂大链轮;右前摆臂大链轮安装在右前摆臂杆前端的右前摆臂小轴上;右前内轴套、右前摆臂驱动链轮、右前外轴套和右前摆臂杆依次通过螺栓串接固连在一起,并通过轴承套接在右前主轴上,其中右前内轴套穿过机身右侧板,两者之间套有轴承,这样可以保证右前摆臂相对于右前主轴和机身右侧板自由转动;右前摆臂电机固定在机身右侧板内侧,且其输出轴穿过右侧板;右前摆臂电机通过链传动带动右前摆臂驱动链轮转动,从而带动右前摆臂杆转动,进而完成机器人右前摆臂的转动;右前内摆臂小链轮和右前外摆臂小链轮与右前行走链轮外径相同,且通过键连接套接在右前主轴外端,与右前主轴同步转动,因此右前内摆臂小链轮和右前外摆臂小链轮可带动右前摆臂履带与右行走履带保持相同的线速度;右前摆臂驱动装置与右前摆臂履带组成右前摆臂组件。
所述左后摆臂驱动装置包括左后摆臂电机、左后摆臂驱动链轮、左后内轴套、左后外轴套、左后摆臂杆、左后摆臂小轴、左后内摆臂小链轮、左后外摆臂小链轮、左后内摆臂大链轮和左后外摆臂大链轮;左后摆臂大链轮安装在左后摆臂杆后端的左后摆臂小轴上;左后内轴套、左后摆臂驱动链轮、左后外轴套和左后摆臂杆依次通过螺栓串接固连在一起,并通过轴承套接在左后主轴上,其中左后内轴套穿过机身左侧板,两者之间套有轴承,这样可以保证左后摆臂相对于左后主轴和机身左侧板自由转动;左后摆臂电机固定在机身左侧板内侧,且其输出轴穿过左侧板;左后摆臂电机通过链传动带动左后摆臂驱动链轮转动,从而带动左后摆臂杆转动,进而完成机器人左后摆臂的转动;左后内摆臂小链轮和左后外摆臂小链轮与左后内行走链轮外径相同,且通过键连接套接在左后主轴外端,与左后主轴同步转动,因此左后内摆臂小链轮和左后外摆臂小链轮可带动左后摆臂履带与左行走履带保持相同的线速度;左后摆臂驱动装置与左后摆臂履带组成左后摆臂组件。所述右后摆臂驱动装置包括右后摆臂电机、右后摆臂驱动链轮、右后内轴套、右后外轴套、右后摆臂杆、右后摆臂小轴、右后内摆臂小链轮、右后外摆臂小链轮、右后内摆臂大链轮和右后外摆臂大链轮;右后摆臂大链轮安装在右后摆臂杆后端的右后摆臂小轴上;右后内轴套、右后摆臂驱动链轮、右后外轴套和右后摆臂杆依次通过螺栓串接固连在一起,并通过轴承套接在右后主轴上,其中右后内轴套穿过机身右侧板,两者之间套有轴承,这样可以保证右后摆臂相对于右后主轴和机身右侧板自由转动;右后摆臂电机固定在机身右侧板内侧,且其输出轴穿过右侧板;右后摆臂电机通过链传动带动右后摆臂驱动链轮转动,从而带动右后摆臂杆转动,进而完成机器人右后摆臂的转动;右后内摆臂小链轮和右后外摆臂小链轮与右后内行走链轮外径相同,且通过键连接套接在右后主轴外端,与右后主轴同步转动,因此右后内摆臂小链轮和右后外摆臂小链轮可带动右后摆臂履带与右行走履带保持相同的线速度;右后摆臂驱动装置与右后摆臂履带组成右后摆臂组件。所述机身框架由侧板、基板、连接板以及履带滚轮、履带垫块组成。两块侧板平行布置在基板两侧,四块连接板两两一组,在上下两面将平行的侧板和基板连结成整体,组成机身框架;框架下表面的连接板上装有履带滚轮,上表面的连接板上装有履带垫块,通过调整履带滚轮和履带垫块相对于连接板的垂直位置,可以调节行走履带的张紧程度。
所述机身框架包括左侧板、右侧板、基板、上前连接板、上后连接板、下前连接板、下后连接板以及履带滚轮和履带垫块。左侧板和右侧板平行布置在基板两侧,四块连接板两两一组安装在框架的上下两面,将平行的左侧板、右侧板和基板连结成整体;机身框架下表面的下连接板上装有履带滚轮,上表面的上连接板上装有履带垫块,通过调整履带滚轮和履带垫块在连接板和上的垂直位置,可以调节左行走履带和右行走履带的张紧程度。
所述左行走驱动电机、右行走驱动电机和四个摆臂电机在基板两侧采用了非对称的交错布置方式,节省了机身框架内的空间。
所述左行走履带和右行走履带在带宽方向采用了阶梯形状的齿形,当机器人通过松软坎坷路面时,高、低齿面均可接触路面,提高了其通过能力,当机器人在硬质平坦路面行走时,只有高齿面与路面接触,减小了机器人着地面积、降低了摩擦阻力,从而实现了机器人的快速、高效行走。
本发明的有益效果:机器人的向地面都被履带覆盖,使得机器人在通过坎坷崎岖地面时行走自如,克服了传统履带式移动机器人由于底盘与地面磕碰而不能移动的缺点;机器人前后共装有四条可以自由独立摆动的摆臂,此举增强了机器人的灵活性和攀附障碍的能力;通过链传动以及电机左右交错布放的方式节省了有限的空间;行走履带采用阶梯状齿形,使得机器人可以在不同质地的路面上充分发挥其机动能力。
附图说明
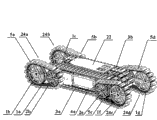
附图1是小型六履带全地形移动机器人整体结构示意图;
附图2是小型六履带全地形移动机器人左前或右前摆臂驱动装置及左、右行走驱动装置示意图;
附图3是小型六履带全地形移动机器人左后摆臂驱动装置,或右后摆臂驱动装置示意图;
附图4是小型六履带全地形移动机器人左前摆臂驱动装置,或右前摆臂驱动装置轴系剖视图;
附图5是小型六履带全地形移动机器人左后摆臂驱动装置,或右后摆臂驱动装置轴系剖视图;
附图6是小型六履带全地形移动机器人机身框架结构示意图;
附图7是小型六履带全地形移动机器人驱动电机交错布放示意图;
附图8是小型六履带全地形移动机器人阶梯状行走履带示意图。
附图中,1a-左前摆臂内大链轮,1b-左前摆臂外大链轮,1c-右前摆臂内大链轮,1d-右前摆臂外大链轮,1e-左后摆臂内大链轮,1f-左后摆臂外大链轮,1g-右后摆臂内大链轮,1h-右后摆臂外大链轮,2a-左前摆臂内小链轮,2b-左前摆臂外小链轮,2c-右前摆臂内小链轮,2d-右前摆臂外小链轮,2e-左后摆臂内小链轮,2f-左后摆臂外小链轮,2g-右后摆臂内小链轮,2h-右后摆臂外小链轮,3a-左行走履带,3b-右行走履带,4a-左侧板,4b-右侧板,5a-左前摆臂履带,5b-右前摆臂履带,5c-左后摆臂履带,5d-右后摆臂履带,6a-左前主轴,6b-右前主轴,6c-左后主轴,6d-右后主轴,7a-左大齿轮,7b-右大齿轮,8a-左前内行走链轮,8b-左前外行走链轮,8c-右前内行走链轮,8d-右前外行走链轮,8e-左后内行走链轮,8f-左后外行走链轮,8g-右后内行走链轮,8h-右后外行走链轮,9-基板,10a-左行走驱动电机,10b-右行走驱动电机,11a-左行走链传动系,11b-右行走链传动系,12a-左小齿轮,12b-右小齿轮,13a-左前摆臂杆,13b-右前摆臂杆,13c-左后摆臂杆,13d-右后摆臂杆,14a-左前内轴套,14b-右前内轴套,14c-左后内轴套,14d-右后内轴套,15a-左前摆臂电机,15b-右前摆臂电机,15c-左后摆臂电机,15d-右后摆臂电机,16a-左前摆臂驱动链轮,16b-右前摆臂驱动链轮,16c-左后摆臂驱动链轮,16d-右后摆臂驱动链轮,17a-左前外轴套,17b-右前外轴套,17c-左后外轴套,17d-右后外轴套,18a-左前摆臂小轴,18b-右前摆臂小轴,18c-左后摆臂小轴,18d-右后摆臂小轴,19a-上前连接板,19b-上后连接板,19c-下前连接板,19d-下后连接板,20-履带垫块,21-履带滚轮,22-承载平台,23a-左小轴,23b-右小轴,24a-左前摆臂驱动装置,24b-右前摆臂驱动装置,24c-左后摆臂驱动装置,24d-右后摆臂驱动装置,25a-左行走驱动装置,25b-右行走驱动装置,26-机身框架。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1所示,本发明是一种小型六履带全地形移动机器人,包括两套行走驱动装置、四套摆臂组件以及机身框架。机器人左行走履带3a与右行走履带3b左右对称布置,覆盖了机器人机身框架26的上、下、前、后表面,驱动电机、控制系统以及动力电源都包含在被左行走履带3a和右行走履带3b覆盖的机身框架26内;左前摆臂驱动装置24a和右前摆臂驱动装置24b安装在机器人前端左右两侧,左后摆臂驱动装置24c和右后摆臂驱动装置24d安装在机器人后端左右两侧;左行走驱动装置25a和右行走驱动装置25b都位于左前摆臂驱动装置24a和右前摆臂驱动装置24b的内侧;左前摆臂履带5a、左后摆臂履带5c与左行走履带3a的线速度相同,右前摆臂履带5b、右后摆臂履带5d与右行走履带3b的线速度相同,在翻越障碍时,四个摆臂可以起到支撑、攀附的作用;机器人上部还装有承载平台22,可用于安装各种设备附件。
如图2所示,所述左行走驱动装置25a包括左行走驱动电机10a、左行走链传动系11a、左小齿轮12a、左小轴23a、左大齿轮7a、左前主轴6a、左前内行走链轮8a、左前外行走链轮8b和左行走履带3a。左行走驱动电机10a固定在机身左侧板4a内侧,且其输出轴穿过左侧板4a;左行走链传动系11a将电机转动传递给固定在左小轴23a上的左小齿轮12a,左小齿轮12a再将转动传递给固定在左前主轴6a上左前内行走链轮8a、左前外行走链轮8b中间的左大齿轮7a,从而带动左前内行走链轮8a和左前外行走链轮8b转动;左前内行走链轮8a和左前外行走链轮8b与左行走履带3a内侧的链条啮合,带动履带转动,实现机器人的行走功能。所述右行走驱动装置25b包括右行走驱动电机10b、右行走链传动系11b、右小齿轮12b、右小轴23b、右大齿轮7b、右前主轴6b、右前内行走链轮8b、右前外行走链轮8b和右行走履带3b。右行走驱动电机10b固定在机身右侧板4b内侧,且其输出轴穿过右侧板4b;右行走链传动系11b将电机转动传递给固定在右小轴23b上的右小齿轮12b,右小齿轮12b再将转动传递给固定在右前主轴6b上右前内行走链轮8c、右前外行走链轮8d中间的右大齿轮7b,从而带动右前内行走链轮8c和右前外行走链轮8d转动;右前内行走链轮8c和右前外行走链轮8d与右行走履带3b内侧的链条啮合,带动履带转动,实现机器人的行走功能。
如图2、图4所示,所述左前摆臂驱动装置24a包括左前摆臂电机15a、左前摆臂驱动链轮16a、左前内轴套14a、左前外轴套17a、左前摆臂杆13a、左前摆臂小轴18a、左前内摆臂小链轮2a、左前外摆臂小链轮2b、左前内摆臂大链轮1a和左前外摆臂大链轮1b;左前摆臂大链轮1a安装在左前摆臂杆13a前端的左前摆臂小轴18a上;左前内轴套14a、左前摆臂驱动链轮16a、左前外轴套17a和左前摆臂杆13a依次通过螺栓串接固连在一起,并通过轴承套接在左前主轴6a上,其中左前内轴套14a穿过机身左侧板4a,两者之间套有轴承,这样可以保证左前摆臂相对于左前主轴6a和机身左侧板4a自由转动;左前摆臂电机15a固定在机身左侧板4a内侧,且其输出轴穿过左侧板4a;左前摆臂电机15a通过链传动带动左前摆臂驱动链轮16a转动,从而带动左前摆臂杆13a转动,进而完成机器人左前摆臂的转动;左前内摆臂小链轮2a和左前外摆臂小链轮2b与左前内行走链轮8a外径相同,且通过键连接套接在左前主轴6a外端,与左前主轴6a同步转动,因此左前内摆臂小链轮2a和左前外摆臂小链轮2b可带动左前摆臂履带5a与左行走履带3a保持相同的线速度;左前摆臂驱动装置24a与左前摆臂履带5a组成左前摆臂组件。所述右前摆臂驱动装置24b包括右前摆臂电机15b、右前摆臂驱动链轮16b、右前内轴套14b、右前外轴套17b、右前摆臂杆13b、右前摆臂小轴18b、右前内摆臂小链轮2c、右前外摆臂小链轮2d、右前内摆臂大链轮1c和右前外摆臂大链轮1d;右前摆臂大链轮1b安装在右前摆臂杆13b前端的右前摆臂小轴18b上;右前内轴套14b、右前摆臂驱动链轮16b、右前外轴套17b和右前摆臂杆13b依次通过螺栓串接固连在一起,并通过轴承套接在右前主轴6b上,其中右前内轴套14b穿过机身右侧板4b,两者之间套有轴承,这样可以保证右前摆臂相对于右前主轴6b和机身右侧板4b自由转动;右前摆臂电机15b固定在机身右侧板4b内侧,且其输出轴穿过右侧板4b;右前摆臂电机15b通过链传动带动右前摆臂驱动链轮16b转动,从而带动右前摆臂杆13b转动,进而完成机器人右前摆臂的转动;右前内摆臂小链轮2c和右前外摆臂小链轮2d与右前行走链轮8b外径相同,且通过键连接套接在右前主轴6b外端,与右前主轴6b同步转动,因此右前内摆臂小链轮2c和右前外摆臂小链轮2d可带动右前摆臂履带5b与右行走履带3b保持相同的线速度;右前摆臂驱动装置24b与右前摆臂履带5b组成右前摆臂组件。
如图3、图5所示,所述左后摆臂驱动装置24c包括左后摆臂电机15c、左后摆臂驱动链轮16c、左后内轴套14c、左后外轴套17c、左后摆臂杆13c、左后摆臂小轴18c、左后内摆臂小链轮2e、左后外摆臂小链轮2f、左后内摆臂大链轮1e和左后外摆臂大链轮1f;左后摆臂大链轮1e安装在左后摆臂杆13c后端的左后摆臂小轴18c上;左后内轴套14c、左后摆臂驱动链轮16c、左后外轴套17c和左后摆臂杆13c依次通过螺栓串接固连在一起,并通过轴承套接在左后主轴6c上,其中左后内轴套14c穿过机身左侧板4a,两者之间套有轴承,这样可以保证左后摆臂相对于左后主轴6c和机身左侧板4a自由转动;左后摆臂电机15c固定在机身左侧板4a内侧,且其输出轴穿过左侧板4a;左后摆臂电机15c通过链传动带动左后摆臂驱动链轮16c转动,从而带动左后摆臂杆13c转动,进而完成机器人左后摆臂的转动;左后内摆臂小链轮2e和左后外摆臂小链轮2f与左后内行走链轮8e外径相同,且通过键连接套接在左后主轴6c外端,与左后主轴6c同步转动,因此左后内摆臂小链轮2e和左后外摆臂小链轮2f可带动左后摆臂履带5c与左行走履带3a保持相同的线速度;左后摆臂驱动装置24c与左后摆臂履带5c组成左后摆臂组件。所述右后摆臂驱动装置24d包括右后摆臂电机15d、右后摆臂驱动链轮16d、右后内轴套14d、右后外轴套17d、右后摆臂杆13d、右后摆臂小轴18d、右后内摆臂小链轮2g、右后外摆臂小链轮2h、右后内摆臂大链轮1g和右后外摆臂大链轮1h;右后摆臂大链轮1d安装在右后摆臂杆13d后端的右后摆臂小轴18d上;右后内轴套14d、右后摆臂驱动链轮16d、右后外轴套17d和右后摆臂杆13d依次通过螺栓串接固连在一起,并通过轴承套接在右后主轴6d上,其中右后内轴套14d穿过机身右侧板4b,两者之间套有轴承,这样可以保证右后摆臂相对于右后主轴6d和机身右侧板4b自由转动;右后摆臂电机15d固定在机身右侧板4b内侧,且其输出轴穿过右侧板4b;右后摆臂电机15d通过链传动带动右后摆臂驱动链轮16d转动,从而带动右后摆臂杆13d转动,进而完成机器人右后摆臂的转动;右后内摆臂小链轮2g和右后外摆臂小链轮2h与右后内行走链轮8g外径相同,且通过键连接套接在右后主轴6d外端,与右后主轴6d同步转动,因此右后内摆臂小链轮2g和右后外摆臂小链轮2h可带动右后摆臂履带5d与右行走履带3b保持相同的线速度;右后摆臂驱动装置24d与右后摆臂履带5d组成右后摆臂组件。
又如图3、图5所示,所述左后内行走链轮8e和左后外行走链轮8f并排固定在左后主轴6c上,并与左行走履带3a内侧的链条啮合;右后内行走链轮8g和右后外行走链轮8h并排固定在右后主轴6d上,并与右行走履带3b内侧的链条啮合。
如图6所示,所述机身框架26包括左侧板4a、右侧板4b、基板9、上前连接板19a、上后连接板19b、下前连接板19c、下后连接板19d以及履带滚轮21和履带垫块20。左侧板4a和右侧板4b平行布置在基板9两侧,四块连接板两两一组安装在框架的上下两面,将平行的左侧板4a、右侧板4b和基板9连结成整体;机身框架26下表面的下连接板19b上装有履带滚轮21,上表面的上连接板19a上装有履带垫块20,通过调整履带滚轮21和履带垫块20在连接板19a和19b上的垂直位置,可以调节左行走履带3a和右行走履带3b的张紧程度。
如图7所示,所述左行走驱动电机10a、右行走驱动电机10b和四个摆臂电机15a、15b、15c以及15d在基板9两侧采用了非对称的交错布置方式,节省了机身框架26内的空间。
如图8所示,所述左行走履带3a和右行走履带3b在带宽方向采用了阶梯形状的齿形,当机器人通过松软坎坷路面时,高、低齿面均可接触路面,提高了其通过能力,当机器人在硬质平坦路面行走时,只有高齿面与路面接触,减小了机器人着地面积、降低了摩擦阻力,从而实现了机器人的快速、高效行走。
Claims (5)
1、一种小型六履带全地形移动机器人,其特征在于:该机器人包括两套行走驱动装置、四套摆臂组件以及机身框架;机器人左行走履带(3a)与右行走履带(3b)左右对称布置,覆盖了机器人机身框架(26)的上、下、前、后表面,驱动电机、控制系统以及动力电源都包含在被左行走履带(3a)和右行走履带(3b)覆盖的机身框架(26)内;左前摆臂驱动装置(24a)和右前摆臂驱动装置(24b)安装在机器人前端左右两侧,左后摆臂驱动装置(24c)和右后摆臂驱动装置(24d)安装在机器人后端左右两侧;左行走驱动装置(25a)和右行走驱动装置(25b)都位于左前摆臂驱动装置(24a)和右前摆臂驱动装置(24b)的内侧;左行走驱动电机(10a)、右行走驱动电机(10b)和左前摆臂电机(15a)、右前摆臂电机(15b)、左后摆臂电机(15c)以及右后摆臂电机(15d)在基板(9)两侧采用了非对称的交错布置方式;机器人上部还装有承载平台(22);机器人左行走履带(3a)和右行走履带(3b)在带宽方向采用了阶梯形状齿形。
2、根据权利要求1所述小型六履带全地形移动机器人,其特征在于所述左行走驱动装置(25a)包括左行走驱动电机(10a)、左行走链传动系(11a)、左小齿轮(12a)、左小轴(23a)、左大齿轮(7a)、左前主轴(6a)、左前内行走链轮(8a)、左前外行走链轮(8b)和左行走履带(3a);左行走驱动电机(10a)固定在左侧板(4a)内侧,且其输出轴穿过左侧板(4a);左行走链传动系(11a)将电机转动传递给固定在左小轴(23a)上的左小齿轮(12a),左小齿轮(12a)再将转动传递给固定在左前主轴(6a)上左前内行走链轮(8a)、左前外行走链轮(8b)中间的左大齿轮(7a),从而带动左前内行走链轮(8a)和左前外行走链轮(8b)转动;左前内行走链轮(8a)和左前外行走链轮(8b)与左行走履带(3a)内侧的链条啮合;所述右行走驱动装置(25b)包括右行走驱动电机(10b)、右行走链传动系(11b)、右小齿轮(12b)、右小轴(23b)、右大齿轮(7b)、右前主轴(6b)、右前内行走链轮(8c)、右前外行走链轮(8d)和右行走履带(3b);右行走驱动电机(10b)固定在右侧板(4b)内侧,且其输出轴穿过右侧板(4b);右行走链传动系(11b)将电机转动传递给固定在右小轴(23b)上的右小齿轮(12b),右小齿轮(12b)再将转动传递给固定在右前主轴(6b)上右前内行走链轮(8c)、右前外行走链轮(8d)中间的右大齿轮(7b),从而带动右前内行走链轮(8c)和右前外行走链轮(8d)转动;右前内行走链轮(8c)和右前外行走链轮(8d)与右行走履带(3b)内侧的链条啮合。
3、根据权利要求1所述小型六履带全地形移动机器人,其特征在于所述左前摆臂驱动装置(24a)包括左前摆臂电机(15a)、左前摆臂驱动链轮(16a)、左前内轴套(14a)、左前外轴套(17a)、左前摆臂杆(13a)、左前摆臂小轴(18a)、左前内摆臂小链轮(2a)、左前外摆臂小链轮(2b)、左前内摆臂大链轮(1a)和左前外摆臂大链轮(1b);左前内摆臂大链轮(1a)和左前外摆臂大链轮(1b)安装在左前摆臂杆(13a)前端的左前摆臂小轴(18a)上;左前内轴套(14a)、左前摆臂驱动链轮(16a)、左前外轴套(17a)和左前摆臂杆(13a)依次通过螺栓串接固连在一起,并通过轴承套接在左前主轴(6a)上,其中左前内轴套(14a)穿过左侧板(4a),两者之间套有轴承;左前摆臂电机(15a)固定在左侧板(4a)内侧,且其输出轴穿过左侧板(4a);左前摆臂电机(15a)通过链传动带动左前摆臂驱动链轮(16a)转动,从而带动左前摆臂杆(13a)转动;左前内摆臂小链轮(2a)和左前外摆臂小链轮(2b)与左前内行走链轮(8a)外径相同,且通过键连接套接在左前主轴(6a)外端,与左前主轴(6a)同步转动;左前摆臂驱动装置(24a)与左前摆臂履带(5a)组成左前摆臂组件;所述右前摆臂驱动装置(24b)包括右前摆臂电机(15b)、右前摆臂驱动链轮(16b)、右前内轴套(14b)、右前外轴套(17b)、右前摆臂杆(13b)、右前摆臂小轴(18b)、右前内摆臂小链轮(2c)、右前外摆臂小链轮(2d)、右前内摆臂大链轮(1c)和右前外摆臂大链轮(1d);右前内摆臂大链轮(1c)和右前外摆臂大链轮(1d)安装在右前摆臂杆(13b)前端的右前摆臂小轴(18b)上;右前内轴套(14b)、右前摆臂驱动链轮(16b)、右前外轴套(17b)和右前摆臂杆(13b)依次通过螺栓串接固连在一起,并通过轴承套接在右前主轴(6b)上,其中右前内轴套(14b)穿过右侧板(4b),两者之间套有轴承;右前摆臂电机(15b)固定在右侧板(4b)内侧,且其输出轴穿过右侧板(4b);右前摆臂电机(15b)通过链传动带动右前摆臂驱动链轮(16b)转动,从而带动右前摆臂杆(13b)转动;右前内摆臂小链轮(2c)和右前外摆臂小链轮(2d)与右前行走链轮(8b)外径相同,且通过键连接套接在右前主轴(6b)外端,与右前主轴(6b)同步转动;右前摆臂驱动装置(24b)与右前摆臂履带(5b)组成右前摆臂组件。
4、根据权利要求1所述小型六履带全地形移动机器人,其特征在于所述左后摆臂驱动装置(24c)包括左后摆臂电机(15c)、左后摆臂驱动链轮(16c)、左后内轴套(14c)、左后外轴套(17c)、左后摆臂杆(13c)、左后摆臂小轴(18c)、左后内摆臂小链轮(2e)、左后外摆臂小链轮(2f)、左后内摆臂大链轮(1e)和左后外摆臂大链轮(1f);左后内摆臂大链轮(1e)和左后外摆臂大链轮(1f)安装在左后摆臂杆(13c)后端的左后摆臂小轴(18c)上;左后内轴套(14c)、左后摆臂驱动链轮(16c)、左后外轴套(17c)和左后摆臂杆(13c)依次通过螺栓串接固连在一起,并通过轴承套接在左后主轴(6c)上,其中左后内轴套(14c)穿过左侧板(4a),两者之间套有轴承,这样可以保证左后摆臂相对于左后主轴(6c)和左侧板(4a)自由转动;左后摆臂电机(15c)固定在左侧板(4a)内侧,且其输出轴穿过左侧板(4a);左后摆臂电机(15c)通过链传动带动左后摆臂驱动链轮(16c)转动,从而带动左后摆臂杆(13c)转动,进而完成机器人左后摆臂的转动;左后内摆臂小链轮(2e)和左后外摆臂小链轮(2f)与左后内行走链轮(8e)外径相同,且通过键连接套接在左后主轴(6c)外端,与左后主轴(6c)同步转动;左后摆臂驱动装置(24c)与左后摆臂履带(5c)组成左后摆臂组件;所述右后摆臂驱动装置(24d)包括右后摆臂电机(15d)、右后摆臂驱动链轮(16d)、右后内轴套(14d)、右后外轴套(17d)、右后摆臂杆(13d)、右后摆臂小轴(18d)、右后内摆臂小链轮(2g)、右后外摆臂小链轮(2h)、右后内摆臂大链轮(1g)和右后外摆臂大链轮(1h);右后内摆臂大链轮(1g)和右后外摆臂大链轮(1h)安装在右后摆臂杆(13d)后端的右后摆臂小轴(18d)上;右后内轴套(14d)、右后摆臂驱动链轮(16d)、右后外轴套(17d)和右后摆臂杆(13d)依次通过螺栓串接固连在一起,并通过轴承套接在右后主轴(6d)上,其中右后内轴套(14d)穿过右侧板(4b),两者之间套有轴承,这样可以保证右后摆臂相对于右后主轴(6d)和右侧板(4b)自由转动;右后摆臂电机(15d)固定在右侧板(4b)内侧,且其输出轴穿过右侧板(4b);右后摆臂电机(15d)通过链传动带动右后摆臂驱动链轮(16d)转动,从而带动右后摆臂杆(13d)转动,进而完成机器人右后摆臂的转动;右后内摆臂小链轮(2g)和右后外摆臂小链轮(2h)与右后内行走链轮(8g)外径相同,且通过键连接套接在右后主轴(6d)外端,与右后主轴(6d)同步转动;右后摆臂驱动装置(24d)与右后摆臂履带(5d)组成右后摆臂组件。
5、根据权利要求1所述小型六履带全地形移动机器人,其特征在于所述机身框架(26)包括左侧板(4a)、右侧板(4b)、基板(9)、上前连接板(19a)、上后连接板(19b)、下前连接板(19c)、下后连接板(19d)以及履带滚轮(21)和履带垫块(20);左侧板(4a)和右侧板(4b)平行布置在基板(9)两侧,上前连接板(19a)与上后连接板(19b)、下前连接板(19c)与下后连接板(19d)两两一组安装在机身框架的上下两面,将平行的左侧板(4a)、右侧板(4b)和基板(9)连结成整体;机身框架(26)下表面的下前连接板(19c)和下后连接板(19d)上都装有履带滚轮(21),上表面的上前连接板(19a)与上后连接板(19b)上都装有履带垫块(20),通过调整履带滚轮(21)和履带垫块(20)在下前连接板(19c)、下后连接板(19d)、上前连接板(19a)及上后连接板(19b)上的垂直位置,可以调节左行走履带(3a)和右行走履带(3b)的张紧程度。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNB2007101177390A CN100443351C (zh) | 2007-06-22 | 2007-06-22 | 小型六履带全地形移动机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNB2007101177390A CN100443351C (zh) | 2007-06-22 | 2007-06-22 | 小型六履带全地形移动机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101077717A CN101077717A (zh) | 2007-11-28 |
| CN100443351C true CN100443351C (zh) | 2008-12-17 |
Family
ID=38905426
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2007101177390A Expired - Fee Related CN100443351C (zh) | 2007-06-22 | 2007-06-22 | 小型六履带全地形移动机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN100443351C (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI454398B (zh) * | 2010-04-06 | 2014-10-01 | Robotex Inc | 機器人系統及使用方法 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101428652B (zh) * | 2007-11-07 | 2010-06-02 | 中国科学院沈阳自动化研究所 | 冰雪面移动机器人 |
| CN101746423B (zh) * | 2008-11-28 | 2012-09-26 | 沈阳新松机器人自动化股份有限公司 | 一种井下用搜救机器人 |
| CN101612866B (zh) * | 2009-06-18 | 2014-06-25 | 田巍 | 轨道步行轮 |
| CN101774409B (zh) * | 2010-03-17 | 2012-05-23 | 北京科技大学 | 一种自适应海底复杂地形的复合轮式行走机构 |
| CN101850700A (zh) * | 2010-05-14 | 2010-10-06 | 郑州新大方重工科技有限公司 | 大吨位滩涂运输车 |
| CN102358361A (zh) * | 2011-09-26 | 2012-02-22 | 吉林大学 | 多路况自适应履臂复合驱动式仿生机器人 |
| HK1150721A2 (en) * | 2011-10-04 | 2011-12-30 | Lee Siu Lun | Electric wheelchair |
| CN102582706B (zh) * | 2012-02-27 | 2013-05-08 | 太原理工大学 | 煤矿井下搜救探测机器人运动装置 |
| CN102849132B (zh) * | 2012-03-30 | 2014-11-26 | 中国人民解放军国防科学技术大学 | 轮履复合变形履带机器人 |
| GB2500950B (en) * | 2012-04-06 | 2016-08-31 | Lun Lee Siu | Electric Wheelchair |
| CN102887181B (zh) * | 2012-06-21 | 2015-05-27 | 西安交通大学 | 一种履带机器人摆臂驱动装置 |
| CN104139810B (zh) * | 2013-05-11 | 2017-09-29 | 焦浩 | 一种机器人行走机构 |
| CN103318288A (zh) * | 2013-06-03 | 2013-09-25 | 上海大学 | 一种同步带传动式全履带机器人 |
| CN104276531B (zh) * | 2013-07-03 | 2016-07-13 | 中国科学院沈阳自动化研究所 | 一种具有移动功能的起缝器 |
| CN103625277B (zh) * | 2013-12-12 | 2015-12-16 | 中国嘉陵工业股份有限公司(集团) | 一种全地形车电动传动装置 |
| CN105667612B (zh) * | 2014-11-18 | 2018-01-09 | 中国人民解放军91872部队青岛研究室 | 一种用于狭窄空间的越障机器人 |
| CN107074307A (zh) * | 2016-06-07 | 2017-08-18 | 罗春晖 | 一种平衡运输工具 |
| CN108238120B (zh) * | 2018-02-13 | 2023-07-11 | 洛阳理工学院 | 一种能够实现单/多维度切换运动的六履带行走装置 |
| CN108275215B (zh) * | 2018-02-13 | 2023-04-14 | 洛阳理工学院 | 一种爬壁车及基于该爬壁车的检测机器人 |
| CN108394483A (zh) * | 2018-03-20 | 2018-08-14 | 南通大学 | 一种多功能货物装卸及运输装置 |
| CN109178124B (zh) * | 2018-09-21 | 2024-02-27 | 周斌 | 一种基于目标追踪的全自由度底盘及控制方法 |
| CN110406604A (zh) * | 2019-07-12 | 2019-11-05 | 北京信息科技大学 | 履带式行进平台及履带机器人 |
| CN113877095A (zh) * | 2021-10-09 | 2022-01-04 | 张现伟 | 一种高层建筑消防无人机 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5435405A (en) * | 1993-05-14 | 1995-07-25 | Carnegie Mellon University | Reconfigurable mobile vehicle with magnetic tracks |
| US6263989B1 (en) * | 1998-03-27 | 2001-07-24 | Irobot Corporation | Robotic platform |
| WO2004039612A2 (en) * | 2002-10-29 | 2004-05-13 | Benjamin Sharon | Intelligent terrain-traversing vehicle |
| US20040168837A1 (en) * | 2002-11-27 | 2004-09-02 | Universite De Sherbrooke | Modular robotic platform |
| US20040216932A1 (en) * | 2001-07-09 | 2004-11-04 | United Defense, Lp | Hybrid wheel and track vehicle drive system |
| EP1502843A2 (de) * | 2003-07-31 | 2005-02-02 | Rheinmetall Landsysteme GmbH | Unbemanntes Sonderfahrzeug mit Allradantrieb |
| CN1759992A (zh) * | 2005-09-12 | 2006-04-19 | 中国科学技术大学 | 具有复合移动机构的全自主高机动机器人 |
-
2007
- 2007-06-22 CN CNB2007101177390A patent/CN100443351C/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5435405A (en) * | 1993-05-14 | 1995-07-25 | Carnegie Mellon University | Reconfigurable mobile vehicle with magnetic tracks |
| US6263989B1 (en) * | 1998-03-27 | 2001-07-24 | Irobot Corporation | Robotic platform |
| US20040216932A1 (en) * | 2001-07-09 | 2004-11-04 | United Defense, Lp | Hybrid wheel and track vehicle drive system |
| WO2004039612A2 (en) * | 2002-10-29 | 2004-05-13 | Benjamin Sharon | Intelligent terrain-traversing vehicle |
| US20040168837A1 (en) * | 2002-11-27 | 2004-09-02 | Universite De Sherbrooke | Modular robotic platform |
| EP1502843A2 (de) * | 2003-07-31 | 2005-02-02 | Rheinmetall Landsysteme GmbH | Unbemanntes Sonderfahrzeug mit Allradantrieb |
| CN1759992A (zh) * | 2005-09-12 | 2006-04-19 | 中国科学技术大学 | 具有复合移动机构的全自主高机动机器人 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI454398B (zh) * | 2010-04-06 | 2014-10-01 | Robotex Inc | 機器人系統及使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101077717A (zh) | 2007-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100443351C (zh) | 小型六履带全地形移动机器人 | |
| CN105383586B (zh) | 轮履腿复合式移动机器人 | |
| KR100478371B1 (ko) | 계단, 경사로, 험로 주행장치 | |
| US10442479B2 (en) | Moving mechanism and electric vehicles and toys equipping the same | |
| CN201760877U (zh) | 一种可变形适应全地形的机器人行走机构 | |
| CN103318288A (zh) | 一种同步带传动式全履带机器人 | |
| CN105167927B (zh) | 一种轮履组合式爬楼梯轮椅 | |
| CN202657137U (zh) | 轮腿复合式运动平台 | |
| CN110217299A (zh) | 多功能通用型机器人底盘 | |
| CN102358361A (zh) | 多路况自适应履臂复合驱动式仿生机器人 | |
| CN202243746U (zh) | 多路况自适应履臂复合驱动式仿生机器人 | |
| CN102895077A (zh) | 一种新型轮-履复合式电动轮椅 | |
| CN102616297A (zh) | 轮腿复合式运动平台 | |
| CN111038612A (zh) | 一种多运动模式轮-履-腿复合式机器人 | |
| CN106892011A (zh) | 履带‑腿足复合式移动机器人 | |
| CN103373402A (zh) | 轮-履复合式模块化移动机器人行驶装置 | |
| CN103359195A (zh) | 一种全地形混合动力底盘 | |
| CN111605634A (zh) | 轮式-履带式变体轮机构 | |
| CN206900502U (zh) | 轮履复合式全地形机器人 | |
| CN203740002U (zh) | 摆臂式履带机器人 | |
| CN112373594A (zh) | 一种轮腿混合驱动式矿用变胞机器人 | |
| CN101428652A (zh) | 冰雪面移动机器人 | |
| CN104058014B (zh) | 一种半轮足式机器人 | |
| CN116443126A (zh) | 全向轮履复合自适应切换的移动机器人及工作方法 | |
| CN205073156U (zh) | 一种轮履组合式爬楼梯轮椅 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20081217 |