BR112018010382B1 - Sistema de navegação, rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente - Google Patents
Sistema de navegação, rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente Download PDFInfo
- Publication number
- BR112018010382B1 BR112018010382B1 BR112018010382-9A BR112018010382A BR112018010382B1 BR 112018010382 B1 BR112018010382 B1 BR 112018010382B1 BR 112018010382 A BR112018010382 A BR 112018010382A BR 112018010382 B1 BR112018010382 B1 BR 112018010382B1
- Authority
- BR
- Brazil
- Prior art keywords
- patient
- viewer
- probe
- control unit
- optical guide
- Prior art date
Links
- 239000000523 sample Substances 0.000 claims abstract description 44
- 230000003287 optical effect Effects 0.000 claims abstract description 35
- 238000001514 detection method Methods 0.000 claims abstract description 23
- 230000004907 flux Effects 0.000 claims abstract description 11
- 239000006185 dispersion Substances 0.000 claims abstract description 5
- 238000012545 processing Methods 0.000 claims description 13
- 238000005259 measurement Methods 0.000 claims description 7
- 239000003550 marker Substances 0.000 claims description 6
- 238000006243 chemical reaction Methods 0.000 claims description 4
- 238000002604 ultrasonography Methods 0.000 claims description 4
- 230000001815 facial effect Effects 0.000 claims description 2
- 239000000835 fiber Substances 0.000 claims description 2
- 239000011521 glass Substances 0.000 claims description 2
- 230000000007 visual effect Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 21
- 230000003190 augmentative effect Effects 0.000 description 11
- 230000007170 pathology Effects 0.000 description 11
- 210000000056 organ Anatomy 0.000 description 9
- 238000002591 computed tomography Methods 0.000 description 8
- 230000011218 segmentation Effects 0.000 description 6
- 238000001356 surgical procedure Methods 0.000 description 6
- 238000002595 magnetic resonance imaging Methods 0.000 description 4
- 230000017074 necrotic cell death Effects 0.000 description 4
- 238000009877 rendering Methods 0.000 description 4
- 238000001574 biopsy Methods 0.000 description 3
- 239000011248 coating agent Substances 0.000 description 3
- 238000000576 coating method Methods 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 230000029058 respiratory gaseous exchange Effects 0.000 description 3
- 238000012800 visualization Methods 0.000 description 3
- 210000003484 anatomy Anatomy 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000001839 endoscopy Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000002324 minimally invasive surgery Methods 0.000 description 2
- 230000008685 targeting Effects 0.000 description 2
- 210000001835 viscera Anatomy 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 1
- 238000002679 ablation Methods 0.000 description 1
- 238000005299 abrasion Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 210000004185 liver Anatomy 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005459 micromachining Methods 0.000 description 1
- 230000000771 oncological effect Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000001575 pathological effect Effects 0.000 description 1
- 238000012831 peritoneal equilibrium test Methods 0.000 description 1
- 238000012636 positron electron tomography Methods 0.000 description 1
- 238000012877 positron emission topography Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000000241 respiratory effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000011477 surgical intervention Methods 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B27/0172—Head mounted characterised by optical features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2063—Acoustic tracking systems, e.g. using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/066—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring torque
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/367—Correlation of different images or relation of image positions in respect to the body creating a 3D dataset from 2D images using position information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/502—Headgear, e.g. helmet, spectacles
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0138—Head-up displays characterised by optical features comprising image capture systems, e.g. camera
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/014—Head-up displays characterised by optical features comprising information/image processing systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0141—Head-up displays characterised by optical features characterised by the informative content of the display
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B2027/0178—Eyeglass type
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0179—Display position adjusting means not related to the information to be displayed
- G02B2027/0187—Display position adjusting means not related to the information to be displayed slaved to motion of at least a part of the body of the user, e.g. head, eye
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Public Health (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Robotics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Radar Systems Or Details Thereof (AREA)
- Nuclear Medicine (AREA)
Abstract
Sistema de navegação, rastreamento e guia (1) para o posicionamento de instrumentos operacionais (5) dentro do corpo de um paciente (P) compreendendo uma unidade de controle (2), um mostrador (3) e um primeiro meio de detecção (4) para determinar a posição espacial do visualizador (3). O sistema (1) compreende ainda um sensor associado a um instrumento operacional (5) e inserível dentro da porção interna (Pi) do corpo do paciente (P). A sonda compreende pelo menos um guia óptico, tendo zonas de dispersão de um fluxo luminoso gerado dentro do guia óptico e meios de detecção para a detecção da dispersão do fluxo luminoso, para identificar a disposição espacial da sonda quando inserida dentro do paciente (P). A unidade de controle (2) é configurada para projetar no visualizador (3) uma imagem do estado interno de pelo menos uma porção interna (Pi) do corpo do paciente (P) e a imagem da sonda com base no arranjo espacial identificado.
Description
[0001] A presente invenção refere-se a um sistema de navegação, rastreamento e guia para a colocação de instrumentos operatórios dentro de um corpo de um paciente no qual a realidade aumentada é usada como a interface do operador.
[0002] O sistema da presente invenção é particularmente adequado para aplicações tais como radiologia diagnostica, radiologia cirúrgica oncológica, radiologia cirúrgica vascular, procedimentos realizados pela inserção de sondas e/ou agulhas (tais como biópsias e aspirações líquidas) e neurocirurgia.
[0003] Até o presente, no campo de cirurgia e navegação cirúrgica, o uso de sistemas que empregam imagens radiológicas e tem interface com os mesmos com o movimento da sonda de ultrassom é conhecido.
[0004] Por exemplo, durante estes tipos de navegação cirúrgica, sistemas equipados com dispositivos de tomografia computadorizada (CT) são usados, os quais proporcionam imagens radiológicas em tempo real e durante a operação (varreduras de CT intraoperatórios).
[0005] Existem também outros sistemas conhecidos que podem fornecer o rastreamento virtual de sondas de ablação mas sem fornecer qualquer informação concernente à deformação.
[0006] Por outro lado, o uso de óculos de sala de operação dotado de um visor para visualização de imagens é conhecido. Para este propósito, o documento EP2737868A1 descreve um sistema que inclui uma lente de aumento cirúrgica sem fio, que permite que um usuário que utilize a lente sem fio durante a execução de um procedimento transmita a informação adquirida a partir da lente sem fio, e para ver a informação de paciente em um visor. Deste modo, a informação transmitida pode ser usada para auxiliar o procedimento no ambiente operacional e melhorar as instruções e para ser registrada para uso posterior.
[0007] Além disso, o documento US 6.847.336 B1 descreve um sistema e um método para a exibição de dados em uma tela translúcida montada no campo normal de visão de um usuário. A tela pode ser montada na cabeça do usuário, ou montada em uma estrutura móvel e posicionada em frente ao usuário. Uma interface de usuário é exibida na tela, incluindo um cursor móvel e um menu de ícones de controle de computador. Um sistema de "rastreamento de olhos" é montado na vizinhança do usuário e é usado para controlar o movimento do cursor.
[0008] Adicionalmente, o documento US7501995B2 descreve um sistema e um método para a apresentação de informações de suporte clínicas que empregam uma navegação baseada em ocular.
[0009] Além do mais, o documento WO200908191 A1 descreve um sistema de exibição seletiva que permite a detecção para exibir seletivamente dados e informação em um dispositivo de exibição montado em óculos.
[00010] Por outro lado, a reconstrução de imagens médicas através de uma exibição tridimensional 3D é igualmente conhecida, em que o rastreamento tridimensional do volume no paciente é fornecido, bem como, possivelmente, também o rastreamento da agulha nos vários campos de aplicação médicos e cirúrgicos.
[00011] Por exemplo, o documento US5526812A descreve um sistema de exibição que permite aumentar e melhorar a exibição de estruturas de corpo durante procedimentos médicos.
[00012] Outros exemplos de sistemas e métodos de navegação na realidade aumentada nos procedimentos relacionados com intervenções médicas são descritos em documentos US 7.774.044 B2, US 2002/0082498 A1 e US 2013/0267838 A1.
[00013] Embora todos os sistemas listados acima descrevam vários métodos de assistência ao operador durante a cirurgia, há ainda algumas limitações no caso de intervenções minimamente invasivas.
[00014] De fato, no caso de intervenções minimamente invasivas, a inserção de instrumentos cirúrgicos dentro do paciente, isto é, sondas, capazes de realizar operações sem abrir o corpo de um paciente. Tais intervenções são complicadas por causa das dificuldades em estimar com precisão a posição dos tecidos sobre os quais é necessário operar e dos instrumentos a serem inseridos. Para esta complexidade, os erros frequentemente ocorrem durante a conclusão da cirurgia.
[00015] Estes sistemas combinam o uso de ultrassom, caracterizados por uma baixa resolução espacial, a exibição de imagens radiológicas, caracterizada por alta resolução, através do rastreamento da sonda de ultrassom para intervenções minimamente invasivas com sensores eletromagnéticos ou sistemas ópticos, sem ou com baixa resolução espacial.
[00016] Neste contexto, a tarefa técnica subjacente à presente invenção é propor uma navegação, sistema/método de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo do paciente que supera uma ou mais desvantagens da técnica anterior mencionada acima.
[00017] Em particular, é um objetivo da presente invenção fornecer uma navegação, sistema/método de rastreamento e guia e um guia para o posicionamento de instrumentos operacionais em que a realidade aumentada é usada como a interface do operador, de modo a permitir que o operador opere no paciente de uma maneira precisa, confiável, segura e eficiente.
[00018] Vantajosamente, a invenção refere-se a um sistema e a um método que traz diversas tecnologias diferentes, todos juntos ou em combinações dos mesmos, o visualizador, em dispositivos de qualquer tipo, de imagens relacionadas com estruturas internas do corpo de um paciente (de tipo biomédico, fisiológico e patológico) e referindo-se aos instrumentos operacionais parcialmente inseridos no interior do corpo do paciente, ambos, portanto, não externamente visíveis ao operador a menos que o corpo do paciente seja aberto. Estas imagens, em 2, 3 ou 4 dimensões, são tornadas visíveis ao operador em posições correspondentes à posição real no espaço das estruturas que elas representam.
[00019] Vantajosamente, de acordo com a invenção, a tela também se refere ao uso, rastreamento e posicionamento de instrumentos cirúrgicos para um foco particular no "direcionamento" de patologias dentro do corpo humano.
[00020] Portanto, a presente invenção proporciona um sistema e um método de navegação, rastreamento e orientação para a colocação de instrumentos operacionais dentro de um paciente no qual a realidade aumentada é usada como uma interface de operador para ver em tempo real a área de operação interna do paciente na posição externa real exata de um paciente.
[00021] De acordo com um primeiro aspecto da invenção, a tarefa técnica mencionada e os objetivos especificados são alcançados substancialmente por uma navegação, sistema de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do paciente, compreendendo as características técnicas estabelecidas em uma ou mais das reivindicações anexas.
[00022] Em particular, a presente invenção proporciona uma navegação, sistema de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente, compreendendo:
[00023] - uma unidade de controle para receber uma pluralidade de informações relacionadas ao estado interno do corpo de um paciente,
[00024] - um visualizador configurado de tal maneira que um operador pode ver a figura pelo menos uma parte interna do corpo de um paciente através do visualizador, e
[00025] - primeiro meio de detecção de primeira posição para determinar a posição espacial do visualizador. A unidade de controle é configurada para projetar no visualizador uma imagem do estado interno da parte interna do corpo de um paciente, em que a imagem é obtida pelo processamento da pluralidade de informações com base na posição espacial do visualizador.
[00026] Vantajosamente, o sistema ainda compreende uma sonda associada a um instrumento operacional e inserível dentro da parte do corpo de um paciente, em que a sonda compreende pelo menos um guia óptico que tem zonas de dispersão de um fluxo luminoso gerado dentro do guia óptico e meio de detecção da dispersão do fluxo luminoso a fim de identificar a disposição espacial da sonda quando inserida no interior do paciente.
[00027] Vantajosamente, a unidade de controle é também configurada para projetar no visualizador a imagem da sonda, com base no arranjo espacial identificado.
[00028] As reivindicações dependentes, incluídas aqui para referência, correspondem a diferentes configurações da invenção.
[00029] Em um segundo aspecto da invenção, a tarefa técnica mencionada e os objetivos especificados são alcançados substancialmente por uma navegação, método de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do paciente, compreendendo as características técnicas estabelecidas em uma ou mais das reivindicações anexas.
[00030] De acordo com a invenção, o método compreende as etapas de:
[00031] -Fornecer um visualizador configurado de tal maneira que um operador pode ver pelo menos uma parte interna do corpo do paciente (P) através do dito visualizador;
[00032] - fornecer primeiros meios de detecção para determinar a posição espacial do visualizador;
[00033] Fornecimento de uma unidade de controle para realizar as etapas de:
[00034] - Recepção de uma pluralidade de informações relacionadas ao estado interno do corpo de um paciente,
[00035] - Processamento da pluralidade de informações com base na posição espacial do visualizador; e
[00036] - Projeção no visualizador de uma imagem do estado interno da pelo menos uma parte interna do corpo do paciente com base no processamento executado.
[00037] Vantajosamente, o método compreende as etapas de:
[00038] - Uma sonda associada a um instrumento opera e inserível dentro da parte do corpo de um paciente, a sonda compreendendo pelo menos um guia óptico tendo zonas de dispersão de um fluxo luminoso gerado dentro do dito guia óptico e meios de detecção da dispersão do fluxo luminoso de modo a identificar o arranjo espacial da sonda quando inserido no interior do corpo do paciente,
[00039] - Além disso, projetando-se no visualizador a imagem da sonda com base no arranjo espacial identificado, pela unidade de controle.
[00040] As reivindicações dependentes, incluídas aqui para referência, correspondem a diferentes configurações da invenção.
[00041] Em um terceiro aspecto da invenção, a tarefa técnica mencionada e os objetivos especificados são alcançados substancialmente por uma navegação, método de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do paciente, em que é realizado por um computador, de acordo com a descrição das reivindicações anexas.
[00042] Em um quarto aspecto da invenção, a tarefa técnica mencionada e os objetivos especificados são alcançados de forma substancial por ASTM programa de computador em que executa as etapas do método descrito, quando em execução em um computador.
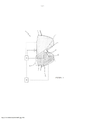
[00043] Características e vantagens adicionais da presente invenção tornar-se-ão mais evidentes a partir do indicador, e, portanto, uma descrição não limitante de uma modalidade preferida mas não exclusiva de uma navegação, sistema de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente, conforme ilustrado no desenho anexo, em que a Figura 1 é uma vista esquemática em perspectiva de uma navegação, sistema de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente de acordo com a presente invenção durante uma configuração de operação.
[00044] Com referência às figuras em anexo, as quais indicam de forma geral uma navegação, sistema de rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente, a partir de agora como indicado simplesmente como o sistema 1.
[00045] O sistema 1 compreende uma unidade de controle 2 configurada para receber uma pluralidade de informações relacionadas ao estado interno do corpo de um paciente P.
[00046] De preferência, a pluralidade de informações relativas ao estado interno do corpo de um paciente P ocorre pelo menos através de uma varredura, por exemplo, RX (Raio X), MRI (formação de imagem de ressonância magnética), CT (tomografia axial computadorizada), PET-CT (tomografia computadorizada de pósitron computadorizada).
[00047] A varredura pode ser realizada in situ ou pré-carregada na unidade de controle 2.
[00048] O sistema 1 compreende um visualizador 3 configurado de tal maneira que um operador não é mostrado, pode ver pelo menos uma parte interna Pi do corpo do paciente P através do visualizador 3
[00049] O sistema também compreende um primeiro meio de detecção 4 para determinar a posição espacial do visualizador 3.
[00050] A unidade de controle 2 é configurada para projetar no visualizador 3 uma imagem do estado interno da parte interna Pi do corpo de um paciente P; em particular, a imagem é obtida desenvolvendo a pluralidade de informações com base na posição espacial do visualizador 3.
[00051] Em outras palavras, a unidade de controle 2 pode projetar uma imagem de realidade aumentada do interior do corpo do sistema um paciente P no visualizador 3 que varia dependendo da disposição espacial do visualizador 3
[00052] De preferência, o visualizador 3 é disposto ao longo de uma parte do corpo do operador do eixo geométrico visual do paciente P de modo a assegurar as melhores condições ergonómicas para o operador e evitar quaisquer problemas de coordenação.
[00053] De preferência, de acordo com uma modalidade preferida da presente invenção ilustrada na Figura 1, o visualizador 3 é definido por um observador facial usável pelo operador (também chamado Visor Montado Na Cabeça, HMD), por exemplo, óculos com lentes pelo menos parcialmente transparentes.
[00054] De preferência, o visualizador 3 compreende um giroscópio, uma bússola e uma unidade de medição inercial; vantajosamente, estes elementos permitem uma identificação correta e precisa da posição espacial do visualizador 3.
[00055] De preferência, o visualizador 3 também compreende um sensor de profundidade adaptado para registrar um volume reconstruído do paciente, que vantajosamente permite ao operador explorar órgãos e patologias dentro do corpo do paciente P enquanto procurando o mesmo paciente P.
[00056] Vantajosamente, o sistema 1 de acordo com a presente invenção compreende ainda uma sonda, não ilustrada, associada (isto é, inserida internamente) para um instrumento operacional 5 e inserível dentro da Parte Pi do corpo do Paciente P.
[00057] A sonda compreende pelo menos um guia óptico, não mostrado, tendo zonas de dispersão de um fluxo luminoso gerado dentro do guia óptico e meios de detecção para a detecção da dispersão do fluxo luminoso, para identificar a disposição espacial da sonda quando inserida dentro do paciente P.
[00058] A unidade de controle 2 é de fato também configurada para projetar sobre a tela 3 a imagem da sonda, com base no arranjo espacial identificado.
[00059] Graças à presente invenção, o operador pode exibir no visualizador 3 o que não seria de outra forma visível ao olho nu. De fato, a unidade de controle 2 transmite no visualizador 3 uma imagem de realidade aumentada que, além de mostrar o estado interno do corpo do paciente P, também mostra o movimento da sonda (e, portanto, do instrumento operacional 5 associado a ele) dentro da parte interna Pi do corpo do mesmo paciente P.
[00060] A imagem real do paciente P visível através do visualizador 3 é, portanto, superposta a uma imagem virtual projetada em transparência, mostrando os órgãos e os tecidos internos do paciente P juntamente com a parte de sonda inserida dentro do paciente P que de outra forma não seria visível.
[00061] Graças à presente invenção, o operador pode operar em segurança e precisão absolutas sobre a área afetada sem a necessidade de utilização para abrir o corpo do paciente P para exibir a área operacional e a posição/movimento dos instrumentos operacionais 5.
[00062] Como mencionado acima, a fim de identificar a disposição espacial da sonda quando inserida dentro do paciente P, um guia óptico é provido, dentro do qual um fluxo luminoso flui; modulando e medindo as perdas de potência ópticas refletidas através das áreas de dispersão, é possível determinar, e portanto, visor no visualizador 3 por meio da unidade de controle 2, a posição da sonda dentro do paciente P.
[00063] Portanto, é possível checar e exibir em tempo real o manuseio correto de instrumentos cirúrgicos 5 que incorporam sondas do tipo de objeto da presente invenção a fim de operar precisamente e confiavelmente.
[00064] Em outras palavras, o guia óptico é microusinado ao longo de seu eixo geométrico central para introduzir perdas de energia óptica refletidas variando de acordo com a entidade e direção da curvatura à qual é submetida.
[00065] As zonas de dispersão são realizadas, de preferência, por meio de um procedimento de microusinagem da guia óptica, que consiste na abrasão mecânica direta do revestimento externo do guia (também chamado de "revestimento") de modo a reduzir localmente o grau de confinamento de luz no núcleo.
[00066] A parte do guia óptico submetido à remoção seletiva do revestimento permite a luz, não mais confinada dentro do núcleo, para escapar no sentido do exterior, resultando em uma perda de potência refletida.
[00067] A perda de potência óptica aumenta ou diminui em seguida à curvatura positiva ou negativa do guia óptico, assim, a perda de potência parece ser diretamente proporcional à curvatura da área sensível (também chamada “núcleo”) do guia óptico.
[00068] Assim, de acordo com o princípio de operação do presente sistema 1, a integração de medição da flexão da sonda é provida, com os dados de posição que se originam do primeiro meio de detecção 4 para determinar a posição espacial do visualizador 3.
[00069] De acordo com uma configuração possível da presente invenção, o sistema de referência espacial é realizado com um braço articulado com cinco graus de liberdade, que permite prover coordenadas Cartesianas X, Y, Z Da sonda, com relação ao sistema de referência de "campo de operação".
[00070] De preferência, as zonas de dispersão são definidas por uma série de primeiras zonas de dispersão dispostos em sequência ao longo de pelo menos uma parte do dito guia óptico.
[00071] De preferência, as zonas de dispersão são ainda definidas por uma série de segundas zonas de dispersão dispostas em sequência ao longo da linha pelo menos uma parte do dito guia óptico e disposta radialmente escalonada com relação a um eixo geométrico central do guia óptico.
[00072] Graças à configuração escalonada das duas séries de zonas de dispersão, e possível obter uma estimativa precisa do arranjo espacial da sonda.
[00073] Ainda mais preferivelmente, as segundas zonas de dispersão são dispostas a um ângulo de 90° com relação à série de primeiras zonas de dispersão, em que o ângulo é medido com relação a um eixo geométrico central do guia óptico.
[00074] De preferência, a sonda compreende duas guias ópticas paralelas, em que a série de primeiras zonas de dispersão e a série de segundas zonas de dispersão são definidas respectivamente em um dos dois guias ópticos.
[00075] De preferência, o guia óptico é conectado a uma fonte de luz, em particular uma fonte de laser, não mostrada, e tem uma parede de reflexão disposta em uma extremidade terminal livre, em que entre a fonte de laser e a parede refletiva um acoplador direcional é disposto, conectado a um osciloscópio.
[00076] Vantajosamente, o fechamento com material refletivo a extremidade livre da fibra óptica, e possível gerar um retorno da luz no sentido oposto.
[00077] De preferência, o sistema compreende um conjunto de conversão de vídeo, não mostrado, conectado à unidade de controle 2.
[00078] De preferência, o conjunto de conversão de vídeo compreende: pelo menos dois conversores VGA-HDMI, pelo menos um conversor BNC-HDMI, e pelo menos duas portas HDMI. Ainda mais preferivelmente, os conversores são dispostos em um único recipiente e os cinco sinais de vídeo definem a entrada de um "comutador" e "escalonador" com cinco entradas e uma única saída HDMI. Os sinais de vídeo são captados por um comutador e enviados em Padrão HDMI para o visualizador 3.
[00079] Os sinais de vídeo são enviados para o visualizador 3 por um dispositivo de espelhamento ou por um codificador; alternativamente, é possível usar um servidor local.
[00080] De acordo com uma configuração possível do presente sistema, espera-se que os sinais de vídeo possam ser selecionados pelo operador por meio de um dispositivo de pressão, por exemplo, um pedal.
[00081] O pedal é útil para a ergonomia durante a cirurgia na qual o médico/operador deve procurar monitores diferentes, ambos durante a operação e durante o diagnóstico, bem como durante o direcionamento no campo de biópsia.
[00082] De preferência, o sistema 1 compreende um segundo meio de detecção 6 da superfície externa do corpo do paciente P, não ilustrado, conectado com a unidade de controle 2 e compreendendo, por exemplo, uma câmera ou uma câmera estereoscópica, preferivelmente integral com o visualizador 3
[00083] Vantajosamente, o segundo meio de detecção 6 da superfície externa do corpo da figura o paciente P permite registrar a operação enquanto o operador realiza o mesmo; também, se instalado no visualizador 3, eles são especialmente úteis com relação a ambas as instruções, porque é possível obter diretamente o ponto de vista clínico, e aspectos legais, porque eles registram toda a operação.
[00084] De preferência, o visualizador 3 compreende uma unidade de transmissão e recepção de dados, não ilustrada, de preferência através de Wi-Fi, conectado com o primeiro meio de detecção para determinar a posição espacial do visualizador 3 e/ou conectado com o segundo meio de detecção 6 da superfície externa do corpo do paciente P.
[00085] Para permitir a exibição de uma imagem de realidade aumentada como fiel e consistente quanto possível com o estado interno real do paciente P, é necessário levar em conta os parâmetros vitais do paciente P (respiração, batimento cardíaco, etc.). De fato, as varreduras radiológicas só podem fornecer uma imagem estática do interior do paciente P.
[00086] Para este propósito, é necessário identificar a variação da configuração espacial da ferramenta superfície externa do corpo do paciente P que o operador olha através do visualizador 3 para obter uma sobreposição/projeção correta da imagem processada pela unidade de controle 2 na imagem real do paciente P.
[00087] A invenção provê para dispor segundos meios de detecção 6 da superfície externa do corpo do paciente P conectado com a unidade de controle 2.
[00088] Em particular, a invenção proporciona a disposição de pelo menos três primeiros marcadores físicos adequados para serem dispostos na respectiva superfície externa da parte de corpo Pi do paciente P e detectável pelo segundo meio de detecção 6; detectar o posicionamento dinâmico dos primeiros marcadores físicos para enviar uma pluralidade de informações para a unidade de controle 2; e pela unidade de controle 2, alinhar os primeiros marcadores virtuais da imagem do estado interno projetado no visualizador 3 com os primeiros marcadores físicos dispostos no corpo do paciente P.
[00089] Em outras palavras, o segundo meio de detecção 6 da superfície externa do corpo da figura o paciente P compreende pelo menos três primeiros marcadores físicos (preferivelmente eletromagnéticos ou ópticos), não ilustrado nas figuras em anexo, adequado para ser disposto na superfície externa da parte de corpo Pi do paciente P e detectável pelo segundo meio de detecção 6. O segundo meio de detecção 6 da superfície externa do corpo do paciente P detecta o posicionamento dinâmico dos primeiros marcadores físicos para enviar uma pluralidade de informações para a unidade de controle 2, que é vantajosamente configurado para alinhar os primeiros marcadores virtuais da imagem do estado interno projetado no visualizador 3 com os primeiros marcadores físicos dispostos no corpo do paciente P.
[00090] Isto torna possível a geração de uma imagem de realidade aumentada precisa e de boa qualidade que reflita instantaneamente o estado real do interior do paciente, as imagens paradas sendo "corrigidas" com os parâmetros vitais do paciente P.
[00091] A invenção provê um segundo marcador físico disposto sobre a sonda e adequado para ser disposto em uso fora do corpo do paciente P, e também para detectar a posição física do segundo marcador utilizando o segundo meio de detecção 6 da superfície externa do corpo do paciente P.
[00092] Em outras palavras, o sistema 1 compreende um segundo marcador físico disposto sobre a sonda e GAT adequado para ser colocado em uso fora do corpo do paciente P, em que o segundo meio de detecção 6 da superfície externa do corpo do paciente P é configurado para também detectar a posição física do segundo marcador.
[00093] Vantajosamente, deste modo, é possível identificar precisamente o posicionamento da sonda no interior da sonda corpo do paciente P e ver o mesmo na realidade aumentada projetada no visualizador 3.
[00094] É útil apontar aqui que a referência espacial pode ser provida de um braço antropomórfico empregado pelo operador, então, nesta configuração, a segunda marca física pode representar uma peça adicional de informação (substancialmente redundante) mas útil para aumentar a confiabilidade do sistema na posição do cabo da sonda.
[00095] De preferência, o segundo meio de detecção 6 da superfície externa do corpo de um paciente compreende pelo menos um de um transdutor ultrassônico, uma unidade de medição inercial e um codificador de medição, de modo a determinar em tempo real os parâmetros vitais do paciente.
[00096] Em particular, o codificador de medição é um sistema composto de pelo menos dois braços unidos por uma junta cujo movimento é detectado por um codificador.
[00097] As extremidades dos dois braços são fixadas ao peito do paciente e, consequentemente, se movem de acordo com o movimento de respiração do peito do paciente. Ao fazê-lo, elas revelam um padrão dinâmico do ciclo respiratório. Cada momento do padrão será combinado com a posição alvo detectada naquele momento, de modo a combinar cada fase do ciclo respiratório, determinada desta maneira, com uma posição do nódulo.
[00098] De preferência, o sistema 1 compreende um sensor de compacidade dos tecidos internos do paciente P, preferivelmente um sensor interferométrico de fibra ótica de modulação de perda.
[00099] Vantajosamente, graças à compacidade do sensor, e possível integrar na pluralidade de informações detectadas também uma medida da assim chamada "rigidez”, que permite a provisão de parâmetros de caracterização de tecidos cruzados pela sonda.
[000100] O presente sistema 1 pode ser usado vantajosamente durante, antes ou após a cirurgia. De fato, o sistema 1 torna possível para o operador mostrar uma sobreposição de órgãos internos e patologias em 3D, alinhada com as estruturas anatômicas reais.
[000101] Além do mais, o presente sistema 1 torna possível a apresentação de instrumentos operatórios dentro do corpo do paciente P e representam sua deformação através de diferentes estruturas anatômicas.
[000102] Pode ser utilizada tanto para procedimentos minimamente invasivos quanto para intervenções cirúrgicas padrão. A única diferença é que, em procedimentos minimamente invasivos, todo o volume reconstruído do interior do corpo do paciente P é alinhado com o corpo do paciente P; enquanto no segundo caso, o alinhamento é feito entre uma parte específica de um órgão e a mesma parte do órgão no volume reconstruído. Por exemplo, a Figura 1 mostra esquematicamente um segmento real do fígado e o volume reconstruído do mesmo.
[000103] O sistema desta invenção tem muitas vantagens.
[000104] A solução inventada permite visualizar subjetivamente com relação ao operador as imagens em 2, 3 ou 4 dimensões no local exato onde as estruturas são referidas são localizadas, com alta resolução espacial, e aumentar a resolução, precisão e reconhecimento do posicionamento correto dos instrumentos operacionais 5.
[000105] Além disso, a solução inventada permite detectar a posição e a flexão das sondas e dos instrumentos deformáveis.
[000106] O sistema, diferente das soluções usadas para resolver os mesmos problemas, permite maior precisão, mesmo sem sistemas eletromagnéticos, através de sistemas mecânicos e/ou visão por computador, junto ou separadamente.
[000107] O sistema da presente invenção pode ser usado para a preparação ou o desempenho de cirurgia, lapartomia, endoscopia ou intervenções minimamente invasivas, percutâneas ou transósseas, ou durante intervenções por lapartomia ou endoscopia. O sistema também é válido para a realização de procedimentos de diagnóstico percutâneos ou radiologicamente guiados, tal como, por meio de exemplo, biópsia ou aspiração de agulha.
[000108] Vantajosamente, a invenção provê que a etapa de processamento da pluralidade de informações com base na posição espacial do visualizador 3 compreende processamento através de segmentação de órgãos e doenças;
[000109] De preferência, a etapa de processamento inclui a produção de renderizações 3D de varreduras radiológicas.
[000110] A invenção também envolve a criação de uma representação 3D com a patologia segmentada e separada do resto do volume como função das segmentações realizadas.
[000111] A invenção compreende ainda uma etapa de se projetar no visualizador 3 uma imagem do estado interno da pelo menos uma parte interna Pi do corpo do paciente P como uma função do processamento executado, realizado pela projeção de uma visualização conjunta de órgãos e patologias.
[000112] Como alternativa, vantajosamente, a invenção provê que a etapa de processamento da pluralidade de informações sobre a posição espacial do visualizador 3 compreende processamento por meio de segmentação de órgãos e necrose pós-tratamento;
[000113] A invenção também envolve a criação de uma representação 3D com a patologia segmentada e separada do resto do volume como função das segmentações realizadas.
[000114] De preferência, a etapa de processamento inclui a produção de renderizações 3D de explorações radiológicas.
[000115] A invenção compreende ainda uma etapa de se projetar no visualizador 3 uma imagem do estado interno da pelo menos uma parte interna Pi do corpo do paciente P como uma função do processamento executado, realizado pela projeção de uma visualização conjunta da patologia e necrose.
[000116] Em outras palavras, em uma primeira das duas alternativas, a invenção provê o uso de um programa de computador capaz de produzir segmentos de órgãos e patologias (tal como, por exemplo, tumores, etc. 0) e uma renderização 3D de varreduras radiológicas. Além disso, o software também é capaz de comparar renderizações tridimensionais a partir de diferentes varreduras. Ele consiste de códigos de software que incluem algoritmos de segmentação.
[000117] O programa, em particular, uma aplicação da rede que pode tirar imagens a partir de diferentes varreduras radiológicas (MRI, CT, PET-CT) e transformar as mesmas em uma representação 3D com a patologia segmentada e separada do resto do volume (por exemplo, com uma cor diferente).
[000118] A segmentação é completamente automática, isto é, sem intervenção do usuário, e não precisa de qualquer correção.
[000119] Além disso, na segunda das duas alternativas, o programa também mede se o tratamento foi bem sucedido ou não. De fato, usando este software, os órgãos e as necrose pós-tratamento são segmentadas nas imagens (CT-PET, MRI e varreduras CT) e o volume é registrado antes do tratamento e após o tratamento, e uma visualização de juntas da patologia e a necrose é realizada.
[000120] O programa espera receber uma solicitação de processamento de imagem de uma parte interna Pi do corpo do paciente P e transmitir dados representativos da solicitação para a unidade de controle 2.
[000121] Em outras palavras, um cliente de rede solicita a execução de um script, o script é colocado em um programador que irá gerenciar a fila/a ordem do script a ser executado no servidor e, uma vez que o programador irá fornecer a passagem para a frente, o servidor processará os arquivos com o script requerido e escrever os arquivos no armazenamento compartilhado.
[000122] O programa espera receber a imagem de uma sonda como previamente definida e para exibir a imagem.
[000123] Em outras palavras, o cliente da rede encontrará os arquivos gerados ou as camadas solicitadas e irão ver os mesmos no visualizador 3, particularmente na HMD.
[000124] Uma outra configuração da invenção envolve o registro de um volume reconstruído de um paciente utilizando um sensor de profundidade. Este sensor vantajosamente permite ao operador explorar órgãos e patologias dentro do corpo do paciente P enquanto assistindo o mesmo paciente P.
[000125] Esta é a solução de um segundo programa de computador, com base no meio apropriado adaptado para implementar a assim chamada "visão de computador".
[000126] Esta segunda solução envolve o uso de sensores de profundidade e de uma câmera estereoscópica, em conjunto ou separadamente, de tal maneira que os dois volumes são alinhados. A dita câmera é usada tanto em reconhecimento AR quanto para a geração de um "mapa de disparidade" que permite ter mais informação sobre a profundidade da cena; por esta segunda razão, a câmera deve também ter a possibilidade de ajustar a distância interocular do mesmo, neste caso a fim de operar com diferentes faixas de profundidade (por exemplo, um ajuste para dois/três pré-conjuntos fixos, para uma faixa longa e uma faixa curta mais precisa).
[000127] Deve ser aqui especificado que o referido sensor de profundidade deve ser suficiente para definir o mapa de profundidade da cena, tornando desnecessário computar um mapa de disparidade utilizando uma câmera estereoscópica, mas dado que este tipo de sensores é frequentemente suscetível a fortes fontes de luz e de raios infravermelhos que podem interferir com a leitura, e possível e, em alguns casos, necessário para integrar ambas as tecnologias para obter um alinhamento mais preciso entre a realidade e a realidade aumentada.
[000128] Sistema/método de navegação, rastreamento e guia para o posicionamento de instrumentos operatórios dentro do corpo de um paciente em que a realidade aumentada é usada como uma interface de operador, de modo a permitir que o operador opere no paciente em um sentido preciso, foi descrita uma maneira confiável, segura e eficiente.
Claims (15)
1. Sistema de navegação, rastreamento e guia (1) para o posicionamento de instrumentos operacionais (5) dentro do corpo de um paciente (P) compreendendo: uma unidade de controle (2) configurada para receber uma pluralidade de informações relacionadas ao estado interno do corpo de um paciente (P), um visualizador (3) configurado de tal maneira que um operador pode ver pelo menos uma parte interna (Pi) do corpo do paciente (P) através do visualizador (3), um primeiro meio de detecção (4) para a determinação da posição espacial do visualizador (3); a unidade de controle (2) sendo configurada para controlar uma projeção sobre o visualizador (3) de uma imagem do estado interno de uma parte interna (Pi) do corpo do paciente (P), a imagem sendo obtida pelo processamento da pluralidade de informações com base na posição espacial do visualizador (3); em que o sistema também compreende uma sonda associada a um instrumento operacional (5) e inserível dentro da parte interna (Pi) do corpo do paciente (P), o sistema sendo caracterizado pelo fato de que a sonda compreende um guia óptico tendo zonas de dispersão de um fluxo luminoso gerado dentro do guia óptico e meios de detecção de dispersão do fluxo luminoso a fim de identificar a disposição espacial da sonda quando inserida dentro do corpo do paciente (P), a unidade de controle (2) sendo também configurada para controlar a projeção sobre o visualizador (3) de uma imagem da sonda baseada na disposição espacial identificada, em que as zonas de dispersão são definidas por uma série de primeiras zonas de dispersão dispostas em sequência ao longo de uma parte do guia óptico.
2. Sistema (1), de acordo com a reivindicação 1, caracterizado pelo fato de que as zonas de dispersão são também definidas por uma série de segundas zonas de dispersão dispostas em sequência ao longo de uma parte do guia óptico e dispostas radialmente escalonadas com relação a um eixo geométrico central de um guia óptico.
3. Sistema (1), de acordo com a reivindicação 2, caracterizado pelo fato de que a série de segundas zonas de dispersão é disposta em um ângulo de 90° com relação à série de primeiras zonas de dispersão, o ângulo sendo medido com relação a um eixo geométrico central do guia óptico.
4. Sistema (1), de acordo com a reivindicação 2 ou 3, caracterizado pelo fato de que a sonda compreende preferencialmente duas guias ópticas paralelas, a série de primeiras zonas de dispersão e a série de segundas zonas de dispersão sendo definidas respectivamente em um dos dois guias ópticos.
5. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que um guia óptico é conectado a uma fonte de luz, em particular uma fonte de laser, e tem uma parede de reflexão disposta em uma extremidade terminal livre, um acoplador direcional conectado a um osciloscópio sendo disposto entre a fonte de laser e a parede refletiva.
6. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de compreender um conjunto de conversão de vídeo conectado à unidade de controle (2), em que preferencialmente o conjunto de conversão de vídeo compreende: dois conversores VGA-HDMI, um conversor BNC-HDMI e duas portas HDMI.
7. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que a pluralidade de informações relacionadas ao estado interno do corpo de um paciente é obtida por meio de uma varredura, por exemplo, RX, MRI, CT, CT-PET.
8. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que o visualizador (3) é disposto ao longo de uma parte de operador do corpo do eixo geométrico visual do paciente (P).
9. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que o visualizador (3) é definido por um observador facial usável pelo operador, por exemplo, óculos.
10. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de compreender um segundo meio de detecção (6) da superfície externa do corpo do paciente (P) conectado com a unidade de controle (2), o segundo meio de detecção (6) compreendendo, por exemplo, uma câmera ou uma câmera estereoscópica, preferivelmente integral com o visualizador (3).
11. Sistema (1), de acordo com a reivindicação 10, caracterizado pelo fato de que o segundo meio de detecção (6) da superfície externa do corpo do paciente (P) compreende três primeiros marcadores físicos adequados para serem dispostos na superfície externa da parte interna (Pi) do corpo do paciente (P) e detectáveis, a unidade de controle (2) sendo configurada para alinhar o primeiro estado interno dos marcadores virtuais da imagem projetada no visualizador (3) com os primeiros marcadores físicos.
12. Sistema (1), de acordo com a reivindicação 10 ou 11, caracterizado pelo fato de que o segundo meio de detecção (6) da superfície externa do corpo do paciente (P) compreende um dentre: um transdutor de ultrassom, uma unidade de medição inercial e um codificador de medição, de modo a determinar os parâmetros vitais do paciente (P) em tempo real.
13. Sistema (1), de acordo com a reivindicação 10, caracterizado pelo fato de que compreende um segundo marcador físico disposto sobre a sonda e adequado para ser disposto em uso fora do corpo do paciente (P), em que o segundo meio de detecção (6) da superfície externa do corpo do paciente (P) é configurado para também detectar a posição física do segundo marcador.
14. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de compreender um braço robô antropomórfico com cinco graus de liberdade, capaz de fornecer as coordenadas cartesianas X, Y, Z da sonda com relação a um sistema de referência predeterminado pelo sistema (1).
15. Sistema (1), de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de compreender um sensor configurado para detectar uma compacidade dos tecidos internos do paciente, preferivelmente um sensor interferométrico de fibra ótica de modulação de perda.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102015000075480 | 2015-11-23 | ||
| ITUB2015A005830A ITUB20155830A1 (it) | 2015-11-23 | 2015-11-23 | "sistema di navigazione, tracciamento, e guida per il posizionamento di strumenti operatori" |
| PCT/IB2016/057001 WO2017089941A1 (en) | 2015-11-23 | 2016-11-21 | Navigation, tracking and guiding system for the positioning of operatory instruments within the body of a patient |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112018010382A2 BR112018010382A2 (pt) | 2018-12-04 |
| BR112018010382B1 true BR112018010382B1 (pt) | 2022-07-26 |
Family
ID=55538379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112018010382-9A BR112018010382B1 (pt) | 2015-11-23 | 2016-11-21 | Sistema de navegação, rastreamento e guia para o posicionamento de instrumentos operacionais dentro do corpo de um paciente |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US20180344408A1 (pt) |
| EP (1) | EP3380034B1 (pt) |
| JP (1) | JP6905535B2 (pt) |
| CN (1) | CN108601628B (pt) |
| AU (1) | AU2016358472A1 (pt) |
| BR (1) | BR112018010382B1 (pt) |
| CA (1) | CA3005705A1 (pt) |
| DK (1) | DK3380034T3 (pt) |
| ES (1) | ES2815800T3 (pt) |
| IT (1) | ITUB20155830A1 (pt) |
| RU (1) | RU2746458C2 (pt) |
| WO (1) | WO2017089941A1 (pt) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| ITUB20155830A1 (it) * | 2015-11-23 | 2017-05-23 | R A W Srl | "sistema di navigazione, tracciamento, e guida per il posizionamento di strumenti operatori" |
| DE102017108235A1 (de) * | 2017-04-18 | 2018-10-18 | Bredent Medical Gmbh & Co. Kg | Brille mit wenigstens einem teiltransparenten Bildschirm und Verfahren zum Betrieb einer Brille |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| WO2020181498A1 (zh) * | 2019-03-12 | 2020-09-17 | 上海复拓知达医疗科技有限公司 | 体内导航系统和方法 |
| US11464581B2 (en) | 2020-01-28 | 2022-10-11 | Globus Medical, Inc. | Pose measurement chaining for extended reality surgical navigation in visible and near infrared spectrums |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| US11607277B2 (en) | 2020-04-29 | 2023-03-21 | Globus Medical, Inc. | Registration of surgical tool with reference array tracked by cameras of an extended reality headset for assisted navigation during surgery |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| CN111544115A (zh) * | 2020-05-16 | 2020-08-18 | 中国人民解放军陆军军医大学第二附属医院 | 一种增强现实导航追踪显示器以及校准方法 |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5337758A (en) * | 1991-01-11 | 1994-08-16 | Orthopedic Systems, Inc. | Spine motion analyzer and method |
| US5526812A (en) * | 1993-06-21 | 1996-06-18 | General Electric Company | Display system for enhancing visualization of body structures during medical procedures |
| US5577502A (en) * | 1995-04-03 | 1996-11-26 | General Electric Company | Imaging of interventional devices during medical procedures |
| US6847336B1 (en) * | 1996-10-02 | 2005-01-25 | Jerome H. Lemelson | Selectively controllable heads-up display system |
| US6033415A (en) | 1998-09-14 | 2000-03-07 | Integrated Surgical Systems | System and method for performing image directed robotic orthopaedic procedures without a fiducial reference system |
| US7343195B2 (en) * | 1999-05-18 | 2008-03-11 | Mediguide Ltd. | Method and apparatus for real time quantitative three-dimensional image reconstruction of a moving organ and intra-body navigation |
| JP2004538538A (ja) | 2000-10-05 | 2004-12-24 | シーメンス コーポレイト リサーチ インコーポレイテツド | 強化現実可視化付きの、手術中にイメージガイドされる神経外科手術法及び手術用装置 |
| WO2002100284A1 (en) | 2001-06-13 | 2002-12-19 | Volume Interactions Pte Ltd | A guide system |
| US20040047044A1 (en) * | 2002-06-25 | 2004-03-11 | Dalton Michael Nicholas | Apparatus and method for combining three-dimensional spaces |
| US7001383B2 (en) | 2002-10-21 | 2006-02-21 | Biosense, Inc. | Real-time monitoring and mapping of ablation lesion formation in the heart |
| CA2524213A1 (en) * | 2003-04-30 | 2004-11-18 | D4D Technologies, L.P. | Intra-oral imaging system |
| US7283572B2 (en) * | 2004-01-15 | 2007-10-16 | Ben Gurion University Of The Negey | Measurement of wavelength transients in tunable lasers |
| US7774044B2 (en) * | 2004-02-17 | 2010-08-10 | Siemens Medical Solutions Usa, Inc. | System and method for augmented reality navigation in a medical intervention procedure |
| US20060089626A1 (en) | 2004-10-22 | 2006-04-27 | Vlegele James W | Surgical device guide for use with an imaging system |
| US7501995B2 (en) | 2004-11-24 | 2009-03-10 | General Electric Company | System and method for presentation of enterprise, clinical, and decision support information utilizing eye tracking navigation |
| US8954134B2 (en) * | 2005-09-13 | 2015-02-10 | Children's Medical Center Corporation | Light-guided transluminal catheter |
| CN101309725A (zh) * | 2005-11-16 | 2008-11-19 | 眼科医疗公司 | 使用激光间接检眼镜的多光点光学医疗处理 |
| EP2046224A2 (en) * | 2006-04-12 | 2009-04-15 | NAVAB, Nassir | Virtual penetrating mirror device for visualizing of virtual objects within an augmented reality environment |
| US9323055B2 (en) * | 2006-05-26 | 2016-04-26 | Exelis, Inc. | System and method to display maintenance and operational instructions of an apparatus using augmented reality |
| WO2008119187A1 (en) * | 2007-04-02 | 2008-10-09 | Esight Corp. | An apparatus and method for augmenting sight |
| US8131379B2 (en) | 2007-08-27 | 2012-03-06 | St. Jude Medical Atrial Fibrillation Division, Inc. | Cardiac tissue elasticity sensing |
| WO2009083191A1 (de) | 2007-12-21 | 2009-07-09 | Holger Essiger | System zur selektiven anzeige von informationen, enthaltend eine brillenartige vorrichtung, insbesondere brille |
| WO2009094646A2 (en) * | 2008-01-24 | 2009-07-30 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer readable media for image guided ablation |
| WO2010067267A1 (en) * | 2008-12-09 | 2010-06-17 | Philips Intellectual Property & Standards Gmbh | Head-mounted wireless camera and display unit |
| DE102009025077A1 (de) | 2009-06-10 | 2010-12-16 | Karl Storz Gmbh & Co. Kg | System zur Orientierungsunterstützung und Darstellung eines Instruments im Inneren eines Untersuchungsobjektes insbesondere im menschlichen Körper |
| IT1401669B1 (it) * | 2010-04-07 | 2013-08-02 | Sofar Spa | Sistema di chirurgia robotizzata con controllo perfezionato. |
| JP2013061521A (ja) * | 2011-09-14 | 2013-04-04 | Brother Ind Ltd | 画像表示装置および画像表示方法 |
| US20130267838A1 (en) | 2012-04-09 | 2013-10-10 | Board Of Regents, The University Of Texas System | Augmented Reality System for Use in Medical Procedures |
| US20140022283A1 (en) * | 2012-07-20 | 2014-01-23 | University Health Network | Augmented reality apparatus |
| US9729831B2 (en) | 2012-11-29 | 2017-08-08 | Sony Corporation | Wireless surgical loupe |
| WO2014134257A1 (en) * | 2013-02-28 | 2014-09-04 | Cook Medical Technologies Llc | Medical devices, systems, and methods for the visualization and treatment of bodily passages |
| US20150116316A1 (en) * | 2013-10-28 | 2015-04-30 | Brown University | Virtual reality methods and systems |
| WO2015127464A1 (en) | 2014-02-24 | 2015-08-27 | H. Lee Moffitt Cancer Center And Research Institute, Inc. | Methods and systems for performing segmentation and registration of images using neutrosophic similarity scores |
| JPWO2015133608A1 (ja) * | 2014-03-07 | 2017-04-06 | 国立大学法人京都大学 | 手術支援システムおよびこれに用いるカメラユニット |
| US9538962B1 (en) * | 2014-12-31 | 2017-01-10 | Verily Life Sciences Llc | Heads-up displays for augmented reality network in a medical environment |
| US20160324580A1 (en) * | 2015-03-23 | 2016-11-10 | Justin Esterberg | Systems and methods for assisted surgical navigation |
| GB2536650A (en) | 2015-03-24 | 2016-09-28 | Augmedics Ltd | Method and system for combining video-based and optic-based augmented reality in a near eye display |
| JP2018534011A (ja) * | 2015-10-14 | 2018-11-22 | サージカル シアター エルエルシー | 拡張現実感手術ナビゲーション |
| ITUB20155830A1 (it) * | 2015-11-23 | 2017-05-23 | R A W Srl | "sistema di navigazione, tracciamento, e guida per il posizionamento di strumenti operatori" |
-
2015
- 2015-11-23 IT ITUB2015A005830A patent/ITUB20155830A1/it unknown
-
2016
- 2016-11-21 CN CN201680068251.0A patent/CN108601628B/zh active Active
- 2016-11-21 RU RU2018117932A patent/RU2746458C2/ru active
- 2016-11-21 EP EP16825885.3A patent/EP3380034B1/en active Active
- 2016-11-21 US US15/775,772 patent/US20180344408A1/en not_active Abandoned
- 2016-11-21 CA CA3005705A patent/CA3005705A1/en active Pending
- 2016-11-21 AU AU2016358472A patent/AU2016358472A1/en not_active Abandoned
- 2016-11-21 DK DK16825885.3T patent/DK3380034T3/da active
- 2016-11-21 BR BR112018010382-9A patent/BR112018010382B1/pt active IP Right Grant
- 2016-11-21 WO PCT/IB2016/057001 patent/WO2017089941A1/en active Application Filing
- 2016-11-21 JP JP2018545714A patent/JP6905535B2/ja active Active
- 2016-11-21 ES ES16825885T patent/ES2815800T3/es active Active
-
2018
- 2018-12-14 US US16/220,809 patent/US11596480B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20180344408A1 (en) | 2018-12-06 |
| RU2018117932A3 (pt) | 2020-04-20 |
| ES2815800T3 (es) | 2021-03-30 |
| EP3380034A1 (en) | 2018-10-03 |
| EP3380034B1 (en) | 2020-06-03 |
| CN108601628A (zh) | 2018-09-28 |
| ITUB20155830A1 (it) | 2017-05-23 |
| WO2017089941A1 (en) | 2017-06-01 |
| JP2019503820A (ja) | 2019-02-14 |
| RU2018117932A (ru) | 2019-12-25 |
| RU2746458C2 (ru) | 2021-04-14 |
| JP6905535B2 (ja) | 2021-07-21 |
| DK3380034T3 (da) | 2020-08-24 |
| AU2016358472A1 (en) | 2018-06-14 |
| US11596480B2 (en) | 2023-03-07 |
| CA3005705A1 (en) | 2017-06-01 |
| BR112018010382A2 (pt) | 2018-12-04 |
| US20190183586A1 (en) | 2019-06-20 |
| CN108601628B (zh) | 2022-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11596480B2 (en) | Navigation, tracking and guiding system for the positioning of operatory instruments within the body of a patient | |
| JP6987893B2 (ja) | 診断試験をリアルタイムの治療に統合する汎用デバイスおよび方法 | |
| US20180116732A1 (en) | Real-time Three Dimensional Display of Flexible Needles Using Augmented Reality | |
| EP2744407B1 (en) | Curved multi-planar reconstruction using fiber optic shape data | |
| US20170296292A1 (en) | Systems and Methods for Surgical Imaging | |
| JP6116754B2 (ja) | 低侵襲手術において画像データを立体視表示するための装置およびその装置の作動方法 | |
| JP6706576B2 (ja) | 最小侵襲性のインターベンションのための形状センスされるロボット超音波 | |
| CN107072743B (zh) | 被布置为与光学形状感测使能的介入设备协作的处理系统 | |
| EP2785237B1 (en) | Surgical port localization | |
| FR2908628A1 (fr) | Procede et systeme de pilotage d'un instrument medical | |
| JP2017086917A (ja) | Ct画像に対して局所的に適用される透過法 | |
| WO2014050018A1 (ja) | 仮想内視鏡画像生成装置および方法並びにプログラム | |
| JP2017500935A5 (pt) | ||
| US10951837B2 (en) | Generating a stereoscopic representation | |
| NL2001680C2 (nl) | Beeldgevende werkwijze voor de medische diagnostiek en volgens deze werkwijze werkende inrichting. | |
| EP3944254A1 (en) | System for displaying an augmented reality and method for generating an augmented reality | |
| US11869154B2 (en) | Method and system for visualising a spatial surface curvature of a 3D-object, computer program product, and computer-readable storage medium | |
| US20200337534A1 (en) | Surgical port localization | |
| CN116758248A (zh) | 增强现实ToF深度传感器矫正的方法、装置、设备及介质 | |
| CA3192826A1 (fr) | Systeme de navigation en realite augmentee pour un robot medical |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 21/11/2016, OBSERVADAS AS CONDICOES LEGAIS |