WO2011039955A1 - 画像診断装置 - Google Patents
画像診断装置 Download PDFInfo
- Publication number
- WO2011039955A1 WO2011039955A1 PCT/JP2010/005604 JP2010005604W WO2011039955A1 WO 2011039955 A1 WO2011039955 A1 WO 2011039955A1 JP 2010005604 W JP2010005604 W JP 2010005604W WO 2011039955 A1 WO2011039955 A1 WO 2011039955A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- transmission
- rotary connector
- optical
- connector
- reception
- Prior art date
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/4461—Features of the scanning mechanism, e.g. for moving the transducer within the housing of the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00172—Optical arrangements with means for scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
- A61B5/0066—Optical coherence imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4416—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to combined acquisition of different diagnostic modalities, e.g. combination of ultrasound and X-ray acquisitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/56—Details of data transmission or power supply
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4405—Device being mounted on a trolley
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/445—Details of catheter construction
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R39/00—Rotary current collectors, distributors or interrupters
- H01R39/02—Details for dynamo electric machines
- H01R39/42—Devices for lifting brushes
Abstract
画像診断装置において金属接触式のロータリコネクタの摩耗を低減させる。本発明に係る画像診断装置は、電気信号の送受信を繰り返す第1の送受信部と光信号の送受信を繰り返す第2の送受信部とを備えるプローブが着脱可能に接続され、体腔内において該第1及び第2の送受信部を回転動作させることで、該第1または第2の送受信部より体腔内での反射信号を取得し、該取得した反射信号に基づいて該体腔内の断層像を生成可能であり、前記第1及び第2の送受信部を回転動作させた状態で、前記電気信号の伝達を行う電気ロータリコネクタ526と、前記光信号の伝達を行う光ロータリコネクタと、を備え、電気ロータリコネクタ526は、回転駆動部側に取り付けられた金属面522、523と、固定部側に取り付けられたブラシ524、525とを備え、該ブラシ524、525は、接触位置と非接触位置との間において、動作可能であることを特徴とする。
Description
本発明は、画像診断装置に関するものである。
従来より、動脈硬化の診断や、バルーンカテーテル、ステント等の高機能カテーテルによる血管内治療時の術前診断、あるいは術後の結果確認のために血管内超音波診断装置(IVUS:Intra Vascular Ultra Sound)が広く使用されている。また、最近では、光干渉性断層法を用いた、より解像度の高い血管内光干渉断層像診断装置(OCT、OFDI)の開発も進められている(例えば、特許第4037538号公報参照)。なお、以下では、これら血管内超音波診断装置(IVUS)及び血管内光干渉断層像診断装置(OCT、OFDI)を総称して、画像診断装置と称することとする。
当該画像診断装置のうち、IVUSは、超音波を使用するため、生体内での減衰が小さく、広い範囲にわたって断層像が得られるという利点がある。一方、OCTやOFDIは、レーザを使用するため、IVUSと比べて解像度の高い断層像が得られるという利点があるものの、生体内での減衰が大きいため、狭い範囲における断層像しか得ることができないという欠点がある。
このため、医療現場では、診断の目的に応じてIVUSとOCT(またはOFDI)との使い分けを行っており、一度に両方を使用する必要がある場合には、IVUS用の送受信部とOCT(またはOFDI)用の送受信部とを有するプローブ(以下、兼用プローブと称する)と、当該兼用プローブが着脱可能に接続されるスキャナ/プルバック部とを利用することとしている。
ここで、IVUSもOCT(またはOFDI)も、プローブを血管内に挿入した状態で、送受信部をラジアル走査させることで、血管内外の断層像を生成する点において共通している。
このため、兼用プローブ部が着脱されるスキャナ/プルバック部には、通常、2種類のロータリコネクタ(ジョイント)が配さる必要がある。具体的には、電気信号の伝達に用いられるIVUS用の金属接触式のロータリコネクタと、光信号の伝達に用いられるOCTまたはOFDI用の非接触式の光学的なロータリコネクタである。
つまり、兼用プローブが着脱可能に接続されるスキャナ/プルバック部には、金属接触式のロータリコネクタと、非接触式の光学的なロータリコネクタとが併存していることとなる。
ここで、IVUSの場合、血液に影響されずに断層像を生成することができるため、30フレーム/秒程度のフレームレートで断層像を生成する。一方、OCTやOFDIの場合、レーザが血液によって散乱・吸収されてしまうため、断層像を生成する間は生理食塩水などで血液を置換しておく必要があり、断層像を生成する間、血管内は虚血状態となる。このため、OCTやOFDIの場合、IVUSよりも高速なフレームレートで断層像を生成させることが必要である(つまり、送受信部を高速に回転させる必要がある)。
このため、上述のように、兼用プローブが接続されるスキャナ/プルバック部では、OCTやOFDIを使用している間、金属接触式のロータリコネクタが(IVUSを使用する場合と比べて)高速で回転することとなり、磨耗粉の発生等による故障や低寿命の原因となっている。
本発明は、上記課題に鑑みてなされたものであり、電気信号用の金属接触式のロータリコネクタと、光信号用の非接触式のロータリコネクタとを備える画像診断装置において、金属接触式のロータリコネクタの摩耗を低減させることを目的とする。
上記の目的を達成するために本発明に係る画像診断装置は以下のような構成を備える。即ち、
電気信号の送受信を繰り返す第1の送受信部と光信号の送受信を繰り返す第2の送受信部とを備えるプローブが着脱可能に接続され、体腔内において該第1及び第2の送受信部を回転動作させることで、該第1または第2の送受信部より体腔内での反射信号を取得し、該取得した反射信号に基づいて該体腔内の断層像を生成する画像診断装置であって、
前記第1及び第2の送受信部を回転動作させた状態で、該第1の送受信部との間で、前記電気信号の伝達を行う電気ロータリコネクタと、
前記第1及び第2の送受信部を回転動作させた状態で、該第2の送受信部との間で、前記光信号の伝達を行う光ロータリコネクタと、を備え、
前記電気ロータリコネクタは、回転駆動部側に取り付けられた金属面と、固定部側に取り付けられたブラシとを備え、該ブラシは、該金属面上を摺動する接触位置と、該金属面と非接触な非接触位置との間において、動作可能であることを特徴とする。
電気信号の送受信を繰り返す第1の送受信部と光信号の送受信を繰り返す第2の送受信部とを備えるプローブが着脱可能に接続され、体腔内において該第1及び第2の送受信部を回転動作させることで、該第1または第2の送受信部より体腔内での反射信号を取得し、該取得した反射信号に基づいて該体腔内の断層像を生成する画像診断装置であって、
前記第1及び第2の送受信部を回転動作させた状態で、該第1の送受信部との間で、前記電気信号の伝達を行う電気ロータリコネクタと、
前記第1及び第2の送受信部を回転動作させた状態で、該第2の送受信部との間で、前記光信号の伝達を行う光ロータリコネクタと、を備え、
前記電気ロータリコネクタは、回転駆動部側に取り付けられた金属面と、固定部側に取り付けられたブラシとを備え、該ブラシは、該金属面上を摺動する接触位置と、該金属面と非接触な非接触位置との間において、動作可能であることを特徴とする。
本発明によれば、電気信号用の金属接触式のロータリコネクタと、光信号用の非接触式のロータリコネクタとを備える画像診断装置において、金属接触式のロータリコネクタの摩耗を低減させることが可能となる。
本発明のその他の特徴及び利点は、添付図面を参照とした以下の説明により明らかになるであろう。なお、添付図面においては、同じ若しくは同様の構成には、同じ参照番号を付すものとする。
添付図面は明細書に含まれ、その一部を構成し、本発明の実施の形態を示し、その記述と共に本発明の原理を説明するために用いられる。
図1は、本発明の第1の実施形態にかかる画像診断装置の外観構成を示す図である。
図2は、プローブ部の構成を示す図である。
図3は、プローブ部内のイメージングコアの構成を示す図である。
図4は、プローブ部における駆動シャフトコネクタの基端側の内部構成を示す図である。
図5は、スキャナ部の光アダプタ及びロータリコネクタの構成を示す図である。
図6Aは、電気ロータリコネクタの構成を示す図である。
図6Bは、電気ロータリコネクタの構成を示す図である。
図7は、プローブ部とスキャナ部とが接続された様子を示す図である。
図8は、プローブ部における駆動シャフトコネクタの基端側の内部構成を示す図である。
図9Aは、電気ロータリコネクタの構成を示す図である。
図9Bは、電気ロータリコネクタの構成を示す図である。
図10は、スキャナ部の光アダプタ及びロータリコネクタの構成を示す図である。
図11は、プローブ部とスキャナ部とが接続された様子を示す図である。
図12は、スキャナ部の光アダプタ及びロータリコネクタの構成を示す図である。
図13Aは、電気ロータリコネクタの構成を示す図である。
図13Bは、電気ロータリコネクタの構成を示す図である。
図14は、ブラシ動作制御の機能ブロックを示す図である。
以下、必要に応じて添付図面を参照しながら本発明の各実施形態について詳細に説明する。
[第1の実施形態]
<1.画像診断装置の外観構成>
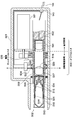
図1は本発明の第1の実施形態にかかる画像診断装置(血管内超音波診断装置(IVUS)、光干渉断層画像診断装置(OCT)または波長掃引利用の光干渉断層画像診断装置(OFDI))100の外観構成を示す図である。
<1.画像診断装置の外観構成>
図1は本発明の第1の実施形態にかかる画像診断装置(血管内超音波診断装置(IVUS)、光干渉断層画像診断装置(OCT)または波長掃引利用の光干渉断層画像診断装置(OFDI))100の外観構成を示す図である。
図1に示すように、画像診断装置100は、プローブ部101と、スキャナ/プルバック部102と、操作制御装置103とを備え、スキャナ/プルバック部102と操作制御装置103とは、信号線104により接続されている。
プローブ部101は、直接血管内に挿入され、IVUS用の送受信部とOCT(またはOFDI)用の送受信部とを有するイメージングコア(詳細は後述)を用いて血管内部での反射信号を取得することで血管内部の状態を測定する。
スキャナ/プルバック部102は、イメージングコアの回転動作を規定するスキャナ部とイメージングコアの直線動作を規定するプルバック部とが一体的に構成されたユニットであり、スキャナ部とプルバック部とが並行して動作することで、イメージングコアのラジアル、アキシアル動作を規定している。
このうち、スキャナ部は、プローブ部101を特別な工具を用いることなく着脱可能に接続することができ、内部には、電気信号用の金属接触式のロータリコネクタ(電気ロータリコネクタ)と、光信号用の非接触式のロータリコネクタ(光ロータリコネクタ)とを有している。
操作制御装置103は、血管内断層診断を行うにあたり、各種設定値を入力するための機能や、測定により得られたデータを処理し、断層像を生成し表示するための機能を備える。
操作制御装置103において、111は本体制御部であり、測定により得られたデータを処理したり、処理結果を出力したりする。111-1はプリンタ/DVDレコーダであり、本体制御部111における処理結果を印刷したり、データとして記憶したりする。
112は操作パネル(インタフェース)であり、ユーザは該操作パネル112を介して、各種設定値の入力を行う。113は表示装置としてのLCDモニタであり、本体制御部111における処理結果を表示する。
<2.プローブ部の全体構成>
次にプローブ部101の全体構成について図2を用いて説明する。図2に示すように、プローブ部101は、直接、血管等の体腔内に挿入される長尺のカテーテルシース201と、ユーザが操作するために体腔内に挿入されずユーザの手元側に配置されるコネクタ部202とにより構成される。カテーテルシース201の先端には、ガイドワイヤルーメン用チューブ203が形成されており、カテーテルシース201は、ガイドワイヤルーメン用チューブ203との接続部分からコネクタ部202との接続部分にかけて連続する管腔として形成されている。
次にプローブ部101の全体構成について図2を用いて説明する。図2に示すように、プローブ部101は、直接、血管等の体腔内に挿入される長尺のカテーテルシース201と、ユーザが操作するために体腔内に挿入されずユーザの手元側に配置されるコネクタ部202とにより構成される。カテーテルシース201の先端には、ガイドワイヤルーメン用チューブ203が形成されており、カテーテルシース201は、ガイドワイヤルーメン用チューブ203との接続部分からコネクタ部202との接続部分にかけて連続する管腔として形成されている。
カテーテルシース201の管腔内部には、超音波信号を送受信する送受信部と光信号を送受信する送受信部とが配された兼用送受信部221と、それを回転させるための駆動力を伝達するとともに、内部に超音波信号を伝送するための電気信号線と光信号を伝送するための光ファイバとが配された駆動シャフト222と、を備えるイメージングコア220がカテーテルシース201のほぼ全長にわたって挿通されている。
コネクタ部202は、カテーテルシース201の基端に一体化して構成されたシースコネクタ202aと駆動シャフト222の基端に一体化して構成された駆動シャフトコネクタ202bとからなる。
シースコネクタ202aとカテーテルシース201との境界部には、耐キンクプロテクタ211が設けられている。これにより所定の剛性が保たれ、急激な変化による折れ曲がり(キンク)を防止することができる。
駆動シャフトコネクタ202bの基端側(詳細は図4参照)は、後述するスキャナ/プルバック部102のスキャナ部(詳細は図5参照)と着脱可能に接続されるよう構成されている。
<3.イメージングコアの断面構成>
次に、イメージングコア220の全体構成について説明する。図3は、イメージングコア220の基端側の構成を示す図である。図3に示すように、イメージングコア220の基端側には、コネクタ装置300が取り付けられている。コネクタ装置300は、駆動シャフトコネクタ202bがスキャナ部の回転駆動部側に接続された際に、回転駆動部内のアダプタ(詳細は後述)との間で、光学的かつ電気的な接続を実現する。また、回転駆動部における回転駆動力を駆動シャフト222に伝達する役割も果たしている。
次に、イメージングコア220の全体構成について説明する。図3は、イメージングコア220の基端側の構成を示す図である。図3に示すように、イメージングコア220の基端側には、コネクタ装置300が取り付けられている。コネクタ装置300は、駆動シャフトコネクタ202bがスキャナ部の回転駆動部側に接続された際に、回転駆動部内のアダプタ(詳細は後述)との間で、光学的かつ電気的な接続を実現する。また、回転駆動部における回転駆動力を駆動シャフト222に伝達する役割も果たしている。
コネクタ装置300は、内部にAPC光コネクタ(図3において不図示)が配置され、かつ、周面に金属接点304が配置されたコネクタ固定部材303と、コネクタ固定部材303を駆動シャフトコネクタ202bの基端側内部において回転自在に支持するためのフランジ302とを備える。
なお、駆動シャフト222は、接続パイプ301を介してコネクタ装置300内に配置されたAPC光コネクタと接合されているものとする。
<4.駆動シャフトコネクタの構成>
次に、駆動シャフトコネクタ202bの断面構成について図4を用いて説明する。図4は駆動シャフトコネクタ202bの基端側の内部構成を示す図である。
次に、駆動シャフトコネクタ202bの断面構成について図4を用いて説明する。図4は駆動シャフトコネクタ202bの基端側の内部構成を示す図である。
図4に示すように、コネクタ装置300は駆動シャフトコネクタ202bの基端側の所定の位置に配されている。また、コネクタ装置300の基端側には、光ファイバ用のコネクタ(APC光コネクタ)402が配されており、中空の円筒形状をしたコネクタ固定部材303の内部において、フェルール404が設けられた光ファイバ401の基端側端部を保持している。これにより駆動シャフト222内の光ファイバ401はスキャナ部内に配された光アダプタと、APC光コネクタ402を介して光学的に接続されることとなる。
一方、コネクタ固定部材303の外表面には、駆動シャフト222内の電気信号線403と接続された金属接点304が配されている。これにより駆動シャフト222内の電気信号線403はスキャナ部内に配されたアダプタ固定部材の金属接点と電気的に接続されることとなる。
なお、コネクタ固定部材303は、先端側端部に円盤状のフランジ302を有しており、駆動シャフトコネクタ202bのハウジング411内部において、回転自在に保持されている。
なお、コネクタ固定部材303は、光アダプタとの結合に際してアダプタ固定部材と協働してAPC光コネクタ402の周方向の位置合わせを行うよう構成されているものとする。
<5.スキャナ部の内部構成>
次に、スキャナ/プルバック部102を構成するスキャナ部の内部構成について説明する。図5はスキャナ部の内部構成を示す図である。
次に、スキャナ/プルバック部102を構成するスキャナ部の内部構成について説明する。図5はスキャナ部の内部構成を示す図である。
図5において、501はスキャナ部のハウジングであり、駆動シャフトコネクタ202bのハウジング411が開口部502側から嵌合可能となるように構成されている。
511はAPC光コネクタ402と結合される光アダプタである。光アダプタ511には、APC光コネクタ402のフェルール404を受け入れるメス型構造の穴516が形成されている。
512はアダプタ固定部材であり、中空の円筒形状からなり、内部に光アダプタ511を相対回転不可能に固定する。なお、アダプタ固定部材512は、外表面を規定する保護管513と、保護管513の内面に固定され、アダプタ固定部材512の内表面を規定する本体514とから構成されており、APC光コネクタ402との結合に際してコネクタ固定部材303と協働してAPC光コネクタ402の周方向の位置合わせを行う。
アダプタ固定部材512の内表面には一対の爪515が形成されており、当該一対の爪515により、APC光コネクタ402が係合されることで、APC光コネクタ402は光アダプタ511と強固に一体化されることとなる。
更に、アダプタ固定部材512の内表面には、一対の金属接点521が配置されており、APC光コネクタ402が結合した際に、コネクタ固定部材303の外表面に配された金属接点304との間で電気的な接続を実現する。
517はレンズ固定スリーブ支持部であり、内部には、光学レンズ518が固定されている。
519は回動部材であり、アダプタ固定部材512及びレンズ固定スリーブ支持部517を支持するとともに、駆動モータ531の回転駆動力を回転ベルト532を介して受けることにより、アダプタ固定部材512及びレンズ固定スリーブ支持部517を一体的に回転させる。これにより、スキャナ部の回転駆動部側が形成される。
回動部材519の周面には、全周にわたって金属ベルト(金属面)522、523が巻き回されており、ブラシ524、525との間で、電気ロータリコネクタ(金属接触式のロータリコネクタ)526を形成している。なお、金属ベルト522、523はそれぞれ金属接点521と接続されており、これにより、駆動シャフト222内の電気信号線403と、ブラシ524、525との間で、電気信号の送受信が可能となる。なお、電気ロータリコネクタ526と信号線104とは、接続部543を介して接続されているものとする。
一方、スキャナ部の固定部側には、レンズ541が固定されている。これにより、APC光コネクタ402のフェルール404より放射された反射光は、光学レンズ518、レンズ541を介して、非接触で固定部側の光ファイバ542に入射されることとなる。また、光ファイバ542より放射された測定光は、レンズ541、光学レンズ518を介して、非接触で回転駆動部側のAPC光コネクタ402のフェルール404に入射されることとなる。つまり、これらは非接触式のロータリコネクタ(光ロータリコネクタ)を形成している。なお、光ファイバ542と信号線104とは、接続部543を介して接続されているものとする。
このように、スキャナ部は、回転駆動部と固定部との間で、電気信号の伝達を行うための金属接触式のロータリコネクタ(電気ロータリコネクタ)と、光信号の伝達を行うための非接触式のロータリコネクタ(光ロータリコネクタ)とを備えている。
<6.電気ロータリコネクタの構成>
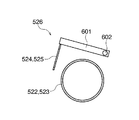
次に、電気ロータリコネクタ526の詳細構成について説明する。図6A及び図6Bは、図5のA-A断面のうち、電気ロータリコネクタ526の縦断面を示した図である。
次に、電気ロータリコネクタ526の詳細構成について説明する。図6A及び図6Bは、図5のA-A断面のうち、電気ロータリコネクタ526の縦断面を示した図である。
図6A及び図6Bに示すように、電気ロータリコネクタ526は、ブラシ524、525を支持する支持部601が、回転軸602周りに回動自在に取り付けられている。このため、スキャナ部に設けられた不図示の操作レバーを操作することにより、ブラシ524、525は金属ベルト522、523上を摺動する接触位置と、金属ベルト522、523に対して非接触な非接触位置との間を動作させることができる。つまり、ブラシ524、525が金属ベルト522、523に接触した状態(図6Aの状態)と、非接触の状態(図6Bの状態)とを切り替え可能な構成となっている。
このように、電気ロータリコネクタ526は、ブラシ524、525と金属ベルト522、523との間の接触状態と非接触状態とが切り替え可能に構成されているため、電気信号の伝達を行う場合(つまり、IVUSを使用する場合)には、接触状態に操作レバーを操作する一方、光信号の伝達を行う場合(つまり、OCTまたはOFDIを使用する場合)には、非接触状態に操作レバーを操作することが可能となる。
この結果、OCTまたはOFDIの使用に際して、回動部材519を高速に回転させた場合であっても、電気ロータリコネクタ526が摩耗することがなくなり、摩耗粉の発生等による故障や低寿命の原因を回避させることが可能となる。
<7.駆動シャフトコネクタとスキャナ部との接続例>
次に、駆動シャフトコネクタ202bとスキャナ部との接続例について説明する。図7は、駆動シャフトコネクタ202bとスキャナ部との接続例を示す図である。
次に、駆動シャフトコネクタ202bとスキャナ部との接続例について説明する。図7は、駆動シャフトコネクタ202bとスキャナ部との接続例を示す図である。
図7に示すように、駆動シャフトコネクタ202bのハウジング411が、スキャナ部の開口部502に沿って挿入されると、コネクタ装置300のコネクタ固定部材303が、アダプタ固定部材512の本体514内面を摺動しながら進み、爪515によって係合されることにより固定される。
APC光コネクタ402が爪515によって固定されることで、APC光コネクタ402と光アダプタ511とが光学的に結合されるとともに、金属接点304と金属接点521とが電気的に接続される。
これにより、駆動シャフト222内の光ファイバ401と、固定部側の光ファイバ542とが光学レンズ518、レンズ541を介して、非接触に接続され、回転駆動部側の光ファイバ401と固定部側の光ファイバ542との間で、光信号の伝達を行うことが可能となる。
また、駆動シャフト222内の電気信号線403と電気ロータリコネクタ526とが、金属接点304、521を介して接続され、回転駆動部側の電気信号線403と固定部側のブラシ524、525との間で、電気信号の伝達を行うことが可能となる。
以上の説明から明らかなように、本実施形態に係る画像診断装置では、電気信号用の金属接触式のロータリコネクタ(電気ロータリコネクタ)と、光信号用の非接触式のロータリコネクタ(光ロータリコネクタ)とが配されたスキャナ部において、電気信号用の金属接触式のロータリコネクタである電気ロータリコネクタを、接触状態と非接触状態とに切り替え可能な構成とした。
この結果、光信号の伝達を行う際に、電気ロータリコネクタを非接触状態に切り替えることが可能となり、電気ロータリコネクタの摩耗を低減させることが可能となった。
[第2の実施形態]
上記第1の実施形態では、電気ロータリコネクタをスキャナ部に配した場合について説明したが、本発明はこれに限定されず、電気ロータリコネクタは、駆動シャフトコネクタに配されていても良い。以下、金属接触式のロータリコネクタとしての電気ロータリコネクタが、駆動シャフトコネクタに配されている場合について説明する。
上記第1の実施形態では、電気ロータリコネクタをスキャナ部に配した場合について説明したが、本発明はこれに限定されず、電気ロータリコネクタは、駆動シャフトコネクタに配されていても良い。以下、金属接触式のロータリコネクタとしての電気ロータリコネクタが、駆動シャフトコネクタに配されている場合について説明する。
なお、画像診断装置の外観構成、プローブ部の全体構成及びイメージングコアの断面構成等は、上記第1の実施形態と同様であるため、以下では説明を省略する。
<1.駆動シャフトコネクタの構成>
はじめに、本実施形態に係る画像診断装置における駆動シャフトコネクタ202bの基端側の内部構成について説明する。図8は、本実施形態に係る画像診断装置における駆動シャフトコネクタ202bの基端側の内部構成を示す図である。
はじめに、本実施形態に係る画像診断装置における駆動シャフトコネクタ202bの基端側の内部構成について説明する。図8は、本実施形態に係る画像診断装置における駆動シャフトコネクタ202bの基端側の内部構成を示す図である。
図8に示すように、コネクタ装置300は駆動シャフトコネクタ202bの基端側の所定の位置に配されている。また、コネクタ装置300の基端側には、光ファイバ用のコネクタ(APC光コネクタ)402が配されており、中空の円筒形状をしたコネクタ固定部材303の内部において、フェルール404が設けられた光ファイバ401の基端側端部を保持している。これにより駆動シャフト222内の光ファイバ401はスキャナ部内に配された光アダプタと、APC光コネクタ402を介して光学的に接続されることとなる。
また、コネクタ固定部材303は、先端側端部に円盤状のフランジ302を有しており、駆動シャフトコネクタ202bのハウジング411内部において、回転自在に保持されている。
一方、接続パイプ301の周面には、全周にわたって金属ベルト801、802が巻き回されており、ブラシ803、804との間で、電気ロータリコネクタ(金属接触式のロータリコネクタ)805を形成している。なお、金属ベルト801、802はそれぞれ電気信号線403と接続されており、これにより、駆動シャフト222内の電気信号線403と、ブラシ803、804との間で、電気信号の伝達が可能となっている。
更に、駆動シャフトコネクタ202bのハウジング411の外表面には、金属接点806、807が配されており、金属接点806、807と電気ロータリコネクタ805とは電気的に接続されている。
このように、本実施形態に係る画像診断装置の場合、駆動シャフトコネクタ内に電気信号の伝達を行うための金属接触式のロータリコネクタ(電気ロータリコネクタ)が備えられている。
<2.電気ロータリコネクタの構成>
次に、電気ロータリコネクタ805の詳細構成について説明する。図9A及び図9Bは、図8のA-A断面のうち、電気ロータリコネクタ805の縦断面を示した図である。
次に、電気ロータリコネクタ805の詳細構成について説明する。図9A及び図9Bは、図8のA-A断面のうち、電気ロータリコネクタ805の縦断面を示した図である。
図9A及び図9Bに示すように、電気ロータリコネクタ805は、ブラシ803、804を支持する支持部901が、回転軸902周りに回動自在に取り付けられている。このため、駆動シャフトコネクタ202bに設けられた不図示の操作レバーを操作することにより、ブラシ803、804は金属ベルト801、802上を摺動する接触位置と、金属ベルト801、802に対して非接触な非接触位置との間を動作させることができる。つまり、ブラシ803、804が金属ベルト801、802に接触した状態(図9Aの状態)と、非接触の状態(図9Bの状態)とを切り替え可能な構成となっている。
このように、電気ロータリコネクタ805は、ブラシ803、804と金属ベルト801、802との間の接触状態と非接触状態とが切り替え可能に構成されているため、電気信号の伝達を行う場合(つまり、IVUSを使用する場合)には、接触状態に操作レバーを操作する一方、光信号の伝達を行う場合(つまり、OCTまたはOFDIを使用する場合)には、非接触状態に操作レバーを操作することが可能となる。
この結果、OCTまたはOFDIの使用に際して、回動部材519を高速に回転させた場合であっても、電気ロータリコネクタ805が摩耗することがなくなり、摩耗粉の発生等による故障や低寿命の原因を回避させることが可能となる。
<3.スキャナ部の内部構成>
次に、スキャナ/プルバック部102を構成するスキャナ部の内部構成について説明する。図10はスキャナ部の内部構成を示す図である。
次に、スキャナ/プルバック部102を構成するスキャナ部の内部構成について説明する。図10はスキャナ部の内部構成を示す図である。
図10において、501はスキャナ部のハウジングであり、駆動シャフトコネクタ202bのハウジング411が開口部502側から嵌合可能となるように構成されている。
ハウジング501の内面には、金属接点1001、1002が配されており、駆動シャフトコネクタ202bのハウジング411が嵌合した際に、ハウジング411の外表面に設けられた金属接点806、807と接続される。なお、金属接点1001、1002と信号線104とは、接続部543を介して接続されているものとする。
511はAPC光コネクタ402と結合される光アダプタである。光アダプタ511には、APC光コネクタ402のフェルール404を受け入れるメス型構造の穴516が形成されている。
512はアダプタ固定部材であり、中空の円筒形状からなり、内部に光アダプタ511を相対回転不可能に固定する。なお、アダプタ固定部材512は、外表面を規定する保護管513と、保護管513の内面に固定され、アダプタ固定部材512の内表面を規定する本体514とから構成されており、APC光コネクタ402との結合に際してコネクタ固定部材303と協働してAPC光コネクタ402の周方向の位置合わせを行う。
アダプタ固定部材512の内表面には一対の爪515が形成されており、当該一対の爪515により、APC光コネクタ402が係合されることで、APC光コネクタ402は光アダプタ511と強固に一体化されることとなる。
517はレンズ固定スリーブ支持部であり、内部には、光学レンズ518が固定されている。
519は回動部材であり、アダプタ固定部材512及びレンズ固定スリーブ支持部517を支持するとともに、駆動モータ531の回転駆動力を回転ベルト532を介して受けることにより、アダプタ固定部材512及びレンズ固定スリーブ支持部517を一体的に回転させる。これにより、スキャナ部の回転駆動部側が形成される。
一方、スキャナ部の固定部側には、レンズ541が固定されている。これにより、APC光コネクタ402のフェルール404より放射された反射光は、光学レンズ518、レンズ541を介して、非接触で固定部側の光ファイバ542に入射されることとなる。また、光ファイバ542より放射された測定光は、レンズ541、光学レンズ518を介して、非接触で回転駆動部側のAPC光コネクタ402のフェルール404に入射されることとなる。つまり、これらは非接触式のロータリコネクタ(光ロータリコネクタ)を形成している。なお、光ファイバ542と信号線104とは、接続部543を介して接続されているものとする。
このように、スキャナ部は、回転駆動部と固定部との間で、光信号の伝達を行うための非接触式のロータリコネクタ(光ロータリコネクタ)を備えている。
<4.駆動シャフトコネクタとスキャナ部との接続例>
次に、駆動シャフトコネクタ202bとスキャナ部との接続例について説明する。図11は、駆動シャフトコネクタ202bとスキャナ部との接続例を示した図である。
次に、駆動シャフトコネクタ202bとスキャナ部との接続例について説明する。図11は、駆動シャフトコネクタ202bとスキャナ部との接続例を示した図である。
図11に示すように、駆動シャフトコネクタ202bのハウジング411が、スキャナ部の開口部502に沿って挿入されると、ハウジング411の外表面が、スキャナ部の開口部502の内表面に沿って進み、所定の位置において固定される。
この状態で、ハウジング411の外表面に配された金属接点806、807とスキャナ部の内表面に配された金属接点1001、1002とが電気的に接続されることとなる。これにより、駆動シャフト222内の電気信号線403と金属接点1001、1002とは、電気ロータリコネクタ805、金属接点806、807を介して接続されることとなり、回転駆動部側の電気信号線403と固定部側の金属接点1001、1002との間で、電気信号の伝達を行うことが可能となる。
また、図11に示すように、駆動シャフトコネクタ202bのハウジング411が、スキャナ部の開口部502に沿って挿入されると、コネクタ装置300のコネクタ固定部材303が、アダプタ固定部材512の本体514内面を摺動しながら進み、爪515によって係合されることにより固定される。
APC光コネクタ402が爪515によって固定されることで、APC光コネクタ402と光アダプタ511とが結合されることとなる。これにより、駆動シャフト222内の光ファイバ401と、固定部側の光ファイバ542とが光学レンズ518、レンズ541を介して、非接触に接続され、回転駆動部側の光ファイバ401と固定部側の光ファイバ542との間で、光信号の伝達を行うことが可能となる。
以上の説明から明らかなように、本実施形態に係る画像診断装置では、電気信号用の金属接触式のロータリコネクタ(電気ロータリコネクタ)を駆動シャフトコネクタに配するとともに、駆動シャフトコネクタ上において、当該金属接触式のロータリコネクタ(電気ロータリコネクタ)の接触状態と非接触状態とが切り替え可能となるように構成した。
この結果、光信号の伝達を行う際に、電気ロータリコネクタを非接触状態に切り替えることが可能となり、電気ロータリコネクタの摩耗を低減させることが可能となった。
[第3の実施形態]
上記第1及び第2の実施形態では、不図示のレバー操作により、電気ロータリコネクタの接触状態と非接触状態とを切り替える構成としたが、本発明はこれに限定されず、ブラシ動作用モータを用いて、電動により、接触状態と非接触状態とを切り替えるように構成としてもよい。以下、図12、図13A及び図13Bを用いて、電動により、電気ロータリコネクタの接触状態と非接触状態とを切り替え可能なスキャナ部について説明する。なお、説明は、図5、図6A及び図6Bとの相違点を中心に行う。
上記第1及び第2の実施形態では、不図示のレバー操作により、電気ロータリコネクタの接触状態と非接触状態とを切り替える構成としたが、本発明はこれに限定されず、ブラシ動作用モータを用いて、電動により、接触状態と非接触状態とを切り替えるように構成としてもよい。以下、図12、図13A及び図13Bを用いて、電動により、電気ロータリコネクタの接触状態と非接触状態とを切り替え可能なスキャナ部について説明する。なお、説明は、図5、図6A及び図6Bとの相違点を中心に行う。
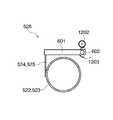
図12は、スキャナ部の内部構成を示す図である。図12において、1201はブラシ動作用モータである。ブラシ動作用モータ1201のシャフトには、ギア1202が取り付けられており、ブラシ524、525を支持する支持部601に取り付けられたギア1203と結合されている。
これにより、ブラシ動作用モータ1201の回転駆動力が支持部601に伝達され、支持部601が回動する。
図13A及び図13Bは、図12のA-A断面のうち、電気ロータリコネクタ526の縦断面を示した図である。
図13Aに示すように、ギア1203は支持部601の回転軸602に取り付けられており、ギア1202が紙面に向かって左回りに回動することにより、支持部601が回転軸602周りを紙面に向かって右回りに回動する。これにより、図13Bに示すように、ブラシ524、525を、金属ベルト522、523に対して非接触の状態にすることができる。
以上の説明から明らかなように、本実施形態に係る画像診断装置では、ブラシ動作用モータを配し、該ブラシ動作用モータの回動方向及び回動量を制御する構成とした。この結果、電気ロータリコネクタの接触状態と非接触状態とを電動により切り替えることが可能となった。
なお、本実施形態では、電気ロータリコネクタがスキャナ部に配された場合について説明したが、本発明はこれに限定されず、電気ロータリコネクタが駆動シャフトコネクタ202bに配された場合(上記第2の実施形態の場合)においても、同様に適用可能であることは言うまでもない。
[第4の実施形態]
上記第3の実施形態では、電気ロータリコネクタにおける接触状態と非接触状態との切り替えを、電動により行う構成についてのみ説明し、動作条件の詳細については特に言及しなかったが、電動の場合、種々の動作条件を設定することにより、様々な自動制御を行うことが可能となる。
上記第3の実施形態では、電気ロータリコネクタにおける接触状態と非接触状態との切り替えを、電動により行う構成についてのみ説明し、動作条件の詳細については特に言及しなかったが、電動の場合、種々の動作条件を設定することにより、様々な自動制御を行うことが可能となる。
以下、本実施形態では、電気ロータリコネクタにおける接触状態と非接触状態との切り替えを自動制御により行う場合の制御方法について説明する。
図14は、電気ロータリコネクタにおける接触状態と非接触状態との切り替えを自動制御により行うための、画像診断装置におけるブラシ動作制御機能のブロック図の一例である。図14に示すブラシ動作制御機能は、画像診断装置100の操作制御装置103において実現されるものとする。
図14において、1401はブラシ動作用モータ制御部であり、種々の動作指令に基づいて、ブラシ動作用モータ1201の回動動作を制御する。
1402は、接触指令/非接触指令を入力するための動作スイッチであり、操作パネル112上に配されているものとする。動作スイッチ1402を介して接触指令が入力されると、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が接触状態となるように、ブラシ動作用モータ1201の回動方向、及び回動量を制御する。同様に、動作スイッチ1402を介して非接触指令が入力されると、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が非接触状態となるように、ブラシ動作用モータ1201の回動方向、及び回動量を制御する。
1403は動作モード取得部であり、自装置がIVUSであるのか、OCT(またはOFDI)であるのか(画像診断装置の種別)を識別し、識別結果をブラシ動作用モータ制御部1401に入力する。
動作モード取得部1403より、自装置がIVUSである旨の識別結果が入力された場合、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が接触状態となるように、ブラシ動作用モータ1201の回動方向及び回動量を制御する。一方、自装置がOCT(またはOFDI)である旨の識別結果が入力された場合、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が非接触状態となるように、ブラシ動作用モータ1201の回動方向及び回動量を制御する。
1404はラジアル走査回転数取得部であり、駆動モータ531の回転数を検出する検出センサの出力を取得し、当該取得した出力に基づいて算出される回転数をブラシ動作用モータ制御部1401に入力する。
ラジアル走査回転数取得部1404より入力された回転数が所定の回転数を超えた場合、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が非接触状態となるように、ブラシ動作用モータ1201の回動方向及び回動量を制御する。一方、ラジアル走査回転数取得部1404より入力された回転数が所定の回転数以下であった場合、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が接触状態となるように、ブラシ動作用モータ1201の回動方向及び回動量を制御する。
1405は、ラジアル走査回転数設定値取得部であり、操作パネル112を介して入力されたラジアル走査回転数の設定値を取得し、ブラシ動作用モータ制御部1401に入力する。
ラジアル走査回転数設定値取得部1405より入力された回転数が所定の回転数を超えていた場合、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が非接触状態となるように、ブラシ動作用モータ1201の回動方向及び回動量を制御する。一方、ラジアル走査回転数設定値取得部1405より入力された回転数が所定の回転数以下であった場合、ブラシ動作用モータ制御部1401では、電気ロータリコネクタ526が接触状態となるように、ブラシ動作用モータ1201の回動方向及び回動量を制御する。
以上の説明から明らかなように、本実施形態に係る画像診断装置では、電気ロータリコネクタにおける接触状態と非接触状態との切り替えを、画像診断装置の動作条件に応じて、自動制御により行うことが可能となる。
[第5の実施形態]
上記第1乃至第4の実施形態では、IVUS用の送受信部とOCT(またはOFDI)用の送受信部とを有する兼用プローブがスキャナ部に接続されることを前提として説明した。しかしながら、本発明はこれに限定されず、IVUS用の送受信部を有するプローブ部、または、OCT(OFDI)用の送受信部を有するプローブが、それぞれ別々にスキャナ部に接続されてもよい。
上記第1乃至第4の実施形態では、IVUS用の送受信部とOCT(またはOFDI)用の送受信部とを有する兼用プローブがスキャナ部に接続されることを前提として説明した。しかしながら、本発明はこれに限定されず、IVUS用の送受信部を有するプローブ部、または、OCT(OFDI)用の送受信部を有するプローブが、それぞれ別々にスキャナ部に接続されてもよい。
本発明は上記実施の形態に制限されるものではなく、本発明の精神及び範囲から離脱することなく、様々な変更及び変形が可能である。従って、本発明の範囲を公にするために、以下の請求項を添付する。
本願は、2009年9月30日提出の日本国特許出願特願2009-227842を基礎として優先権を主張するものであり、その記載内容の全てを、ここに援用する。
Claims (12)
- 電気信号の送受信を繰り返す第1の送受信部と光信号の送受信を繰り返す第2の送受信部とを備えるプローブが着脱可能に接続され、体腔内において該第1及び第2の送受信部を回転動作させることで、該第1または第2の送受信部より体腔内での反射信号を取得し、該取得した反射信号に基づいて該体腔内の断層像を生成する画像診断装置であって、
前記第1及び第2の送受信部を回転動作させた状態で、該第1の送受信部との間で、前記電気信号の伝達を行う電気ロータリコネクタと、
前記第1及び第2の送受信部を回転動作させた状態で、該第2の送受信部との間で、前記光信号の伝達を行う光ロータリコネクタと、を備え、
前記電気ロータリコネクタは、回転駆動部側に取り付けられた金属面と、固定部側に取り付けられたブラシとを備え、該ブラシは、該金属面上を摺動する接触位置と、該金属面と非接触な非接触位置との間において、動作可能であることを特徴とする画像診断装置。 - 前記プローブが着脱可能に接続される接続部を更に備え、
前記電気ロータリコネクタと、前記光ロータリコネクタとは、前記接続部に配置されていることを特徴とする請求項1に記載の画像診断装置。 - 前記プローブが着脱可能に接続される接続部を更に備え、
前記電気ロータリコネクタは、前記プローブに配置され、前記光ロータリコネクタは、前記接続部に配置されていることを特徴とする請求項1に記載の画像診断装置。 - 前記ブラシを接触位置と非接触位置との間で動作させるための操作レバーを更に備えることを特徴とする請求項1乃至3のいずれか1項に記載の画像診断装置。
- 前記ブラシを接触位置と非接触位置との間で動作させるための駆動モータを更に備えることを特徴とする請求項1乃至3のいずれか1項に記載の画像診断装置。
- 前記駆動モータは、前記画像診断装置の種別、または、前記第1及び第2の送受信部を回転動作させた際の回転数、または、前記第1及び第2の送受信部を回転動作させるための設定値のいずれかに応じて、動作制御されることを特徴とする請求項5に記載の画像診断装置。
- 電気信号の送受信を繰り返す第1の送受信部を備える第1のプローブと、光信号の送受信を繰り返す第2の送受信部を備える第2のプローブとが、それぞれ着脱可能に接続され、体腔内において該第1または第2の送受信部を回転動作させることで、該第1または第2の送受信部より体腔内での反射信号を取得し、該取得した反射信号に基づいて該体腔内の断層像を生成する画像診断装置であって、
前記第1の送受信部を回転動作させた状態で、該第1の送受信部との間で、前記電気信号の伝達を行う電気ロータリコネクタと、
前記第2の送受信部を回転動作させた状態で、該第2の送受信部との間で、前記光信号の伝達を行う光ロータリコネクタと、を備え、
前記電気ロータリコネクタは、回転駆動部側に取り付けられた金属面と、固定部側に取り付けられたブラシとを備え、該ブラシは、該金属面上を摺動する接触位置と、該金属面と非接触な非接触位置との間において、動作可能であることを特徴とする画像診断装置。 - 前記第1及び第2のプローブがそれぞれ着脱可能に接続される接続部を更に備え、
前記電気ロータリコネクタと、前記光ロータリコネクタとは、前記接続部に配置されていることを特徴とする請求項7に記載の画像診断装置。 - 前記第1及び第2のプローブがそれぞれ着脱可能に接続される接続部を更に備え、
前記電気ロータリコネクタは、前記第1のプローブに配置され、前記光ロータリコネクタは、前記接続部に配置されていることを特徴とする請求項1に記載の画像診断装置。 - 前記ブラシを接触位置と非接触位置との間で動作させるための操作レバーを更に備えることを特徴とする請求項7乃至9のいずれか1項に記載の画像診断装置。
- 前記ブラシを接触位置と非接触位置との間で動作させるための駆動モータを更に備えることを特徴とする請求項7乃至9のいずれか1項に記載の画像診断装置。
- 前記駆動モータは、前記画像診断装置の種別、または、前記第1または第2の送受信部を回転動作させた際の回転数、または、前記第1または第2の送受信部を回転動作させるための設定値のいずれかに応じて、動作制御されることを特徴とする請求項11に記載の画像診断装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10820081.7A EP2484288B1 (en) | 2009-09-30 | 2010-09-14 | Image diagnosis device |
| EP14157167.9A EP2737859B1 (en) | 2009-09-30 | 2010-09-14 | Image diagnosis device |
| US13/499,589 US20120226151A1 (en) | 2009-09-30 | 2010-09-14 | Imaging apparatus for diagnosis |
| JP2011534049A JP5563582B2 (ja) | 2009-09-30 | 2010-09-14 | 画像診断装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-227842 | 2009-09-30 | ||
| JP2009227842 | 2009-09-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011039955A1 true WO2011039955A1 (ja) | 2011-04-07 |
Family
ID=43825808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/005604 WO2011039955A1 (ja) | 2009-09-30 | 2010-09-14 | 画像診断装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20120226151A1 (ja) |
| EP (2) | EP2484288B1 (ja) |
| JP (1) | JP5563582B2 (ja) |
| WO (1) | WO2011039955A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2013042231A1 (ja) * | 2011-09-21 | 2015-03-26 | 医療法人澄心会豊橋ハートセンター | 血管断面形状数値化装置及びそれを用いた血管断面形状数値化方法 |
| WO2015141136A1 (ja) * | 2014-03-19 | 2015-09-24 | テルモ株式会社 | 変換コネクタ、及び、カテーテルセット |
| JP2016501079A (ja) * | 2012-11-19 | 2016-01-18 | ライトラボ・イメージング・インコーポレーテッド | マルチモーダルプローブのためのインターフェイス装置、システム及び方法 |
| JP2018157938A (ja) * | 2017-03-22 | 2018-10-11 | テルモ株式会社 | 画像診断装置 |
| JP2021065725A (ja) * | 2021-01-21 | 2021-04-30 | テルモ株式会社 | 画像診断装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9289191B2 (en) | 2011-10-12 | 2016-03-22 | Seno Medical Instruments, Inc. | System and method for acquiring optoacoustic data and producing parametric maps thereof |
| US20130296684A1 (en) * | 2011-11-02 | 2013-11-07 | Seno Medical Instruments, Inc. | Probe holder |
| CA2866840C (en) | 2012-03-09 | 2022-03-29 | Seno Medical Instruments, Inc. | Statistical mapping in an optoacoustic imaging system |
| EP3181035B1 (en) * | 2014-08-14 | 2023-09-13 | Terumo Kabushiki Kaisha | Connection device and imaging device provided with said connection device |
| EP4035586A1 (en) | 2015-04-16 | 2022-08-03 | Gentuity LLC | Micro-optic probes for neurology |
| JP6981967B2 (ja) | 2015-08-31 | 2021-12-17 | ジェンテュイティ・リミテッド・ライアビリティ・カンパニーGentuity, LLC | 撮像プローブおよびデリバリデバイスを含む撮像システム |
| JP6809949B2 (ja) | 2017-03-21 | 2021-01-06 | テルモ株式会社 | 画像診断装置及びその作動方法及びプログラム |
| JP7160935B2 (ja) | 2017-11-28 | 2022-10-25 | ジェンテュイティ・リミテッド・ライアビリティ・カンパニー | 撮像システム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0437538B2 (ja) | 1980-07-18 | 1992-06-19 | Tokyo Shibaura Electric Co | |
| JPH11226017A (ja) * | 1998-02-19 | 1999-08-24 | Aloka Co Ltd | 超音波診断装置 |
| JP2006334169A (ja) * | 2005-06-02 | 2006-12-14 | Fujifilm Holdings Corp | 超音波内視鏡システムおよび電子内視鏡システム |
| JP2007267867A (ja) * | 2006-03-30 | 2007-10-18 | Terumo Corp | 画像診断装置およびその処理方法 |
| JP2009183416A (ja) * | 2008-02-05 | 2009-08-20 | Yamaguchi Univ | 診断用カテーテル |
| JP2009183417A (ja) * | 2008-02-05 | 2009-08-20 | Yamaguchi Univ | 診断システム |
| JP2009227842A (ja) | 2008-03-24 | 2009-10-08 | Sekisui Plastics Co Ltd | 高分子ゲル製造方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4544215A (en) * | 1983-08-09 | 1985-10-01 | Fritsch Joseph E | Self-contained slip ring assembly |
| DE9400080U1 (de) * | 1993-01-15 | 1994-03-03 | Siemens Ag | Trägereinrichtung für eine Bürste |
| US5734219A (en) * | 1996-06-17 | 1998-03-31 | Siemens Electric Limited | Sliding brush system with shape memory alloy element for two-speed direct current motor |
| JP4538916B2 (ja) * | 2000-07-31 | 2010-09-08 | パナソニック株式会社 | 超音波振動子駆動モータ装置とそれを使用した超音波診断装置 |
| US20070178767A1 (en) * | 2006-01-30 | 2007-08-02 | Harshman E S | Electrical connector |
| JP2007268133A (ja) * | 2006-03-31 | 2007-10-18 | Terumo Corp | カテーテル装置 |
| EP2628443B1 (en) * | 2006-11-08 | 2021-05-12 | Lightlab Imaging, Inc. | Opto-acoustic imaging device |
| JP2010516304A (ja) * | 2007-01-19 | 2010-05-20 | サニーブルック・ヘルス・サイエンシズ・センター | 超音波と光学を複合した画像手段を有する撮像プローブ |
| JP5291304B2 (ja) * | 2007-06-29 | 2013-09-18 | テルモ株式会社 | 光ケーブルおよびこれを使用した光干渉画像診断装置 |
| DE102007043639A1 (de) * | 2007-09-13 | 2009-04-09 | Siemens Ag | Anordnung zur elektrisch leitenden Verbindung |
| DE102008000489B3 (de) * | 2007-11-20 | 2009-02-05 | Schleifring Und Apparatebau Gmbh | Verfahren und Vorrichtung zur Reparatur eines Schleifringes im eingebauten Zustand |
| JP5112021B2 (ja) * | 2007-11-26 | 2013-01-09 | 株式会社東芝 | 血管内画像診断装置及び血管内画像診断システム |
-
2010
- 2010-09-14 WO PCT/JP2010/005604 patent/WO2011039955A1/ja active Application Filing
- 2010-09-14 EP EP10820081.7A patent/EP2484288B1/en active Active
- 2010-09-14 JP JP2011534049A patent/JP5563582B2/ja active Active
- 2010-09-14 EP EP14157167.9A patent/EP2737859B1/en active Active
- 2010-09-14 US US13/499,589 patent/US20120226151A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0437538B2 (ja) | 1980-07-18 | 1992-06-19 | Tokyo Shibaura Electric Co | |
| JPH11226017A (ja) * | 1998-02-19 | 1999-08-24 | Aloka Co Ltd | 超音波診断装置 |
| JP2006334169A (ja) * | 2005-06-02 | 2006-12-14 | Fujifilm Holdings Corp | 超音波内視鏡システムおよび電子内視鏡システム |
| JP2007267867A (ja) * | 2006-03-30 | 2007-10-18 | Terumo Corp | 画像診断装置およびその処理方法 |
| JP2009183416A (ja) * | 2008-02-05 | 2009-08-20 | Yamaguchi Univ | 診断用カテーテル |
| JP2009183417A (ja) * | 2008-02-05 | 2009-08-20 | Yamaguchi Univ | 診断システム |
| JP2009227842A (ja) | 2008-03-24 | 2009-10-08 | Sekisui Plastics Co Ltd | 高分子ゲル製造方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2484288A4 * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2013042231A1 (ja) * | 2011-09-21 | 2015-03-26 | 医療法人澄心会豊橋ハートセンター | 血管断面形状数値化装置及びそれを用いた血管断面形状数値化方法 |
| JP2016501079A (ja) * | 2012-11-19 | 2016-01-18 | ライトラボ・イメージング・インコーポレーテッド | マルチモーダルプローブのためのインターフェイス装置、システム及び方法 |
| WO2015141136A1 (ja) * | 2014-03-19 | 2015-09-24 | テルモ株式会社 | 変換コネクタ、及び、カテーテルセット |
| JPWO2015141136A1 (ja) * | 2014-03-19 | 2017-04-06 | テルモ株式会社 | 変換コネクタ、及び、カテーテルセット |
| JP2018157938A (ja) * | 2017-03-22 | 2018-10-11 | テルモ株式会社 | 画像診断装置 |
| JP2021065725A (ja) * | 2021-01-21 | 2021-04-30 | テルモ株式会社 | 画像診断装置 |
| JP7223042B2 (ja) | 2021-01-21 | 2023-02-15 | テルモ株式会社 | 画像診断装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2737859A1 (en) | 2014-06-04 |
| EP2737859B1 (en) | 2019-11-06 |
| EP2484288A1 (en) | 2012-08-08 |
| EP2484288A4 (en) | 2013-09-18 |
| JPWO2011039955A1 (ja) | 2013-02-21 |
| EP2484288B1 (en) | 2014-10-22 |
| JP5563582B2 (ja) | 2014-07-30 |
| US20120226151A1 (en) | 2012-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5563582B2 (ja) | 画像診断装置 | |
| EP2832301B1 (en) | Probe and diagnostic imaging device | |
| JP5981557B2 (ja) | 画像診断装置 | |
| JP6031089B2 (ja) | プローブ及び画像診断装置 | |
| WO2013145637A1 (ja) | プローブ | |
| WO2013145690A1 (ja) | 断層画像生成装置および制御方法 | |
| JP5718819B2 (ja) | 画像診断装置及びその制御方法 | |
| JP2017056142A (ja) | 画像診断用カテーテル | |
| JP5484971B2 (ja) | 画像診断装置及びその処理方法 | |
| JP5628895B2 (ja) | プローブ及び光画像診断装置 | |
| CN110809432A (zh) | 图像诊断用导管 | |
| JP5689721B2 (ja) | モータ駆動装置及び光画像診断装置 | |
| JP5913607B2 (ja) | 校正冶具、画像診断装置及び画像診断装置の校正方法 | |
| JP5296867B2 (ja) | 光伝送装置 | |
| JP6805009B2 (ja) | 画像診断用カテーテル | |
| WO2019189755A1 (ja) | 医療システム | |
| WO2014049641A1 (ja) | 画像診断装置及び情報処理装置並びにそれらの制御方法 | |
| JP4681977B2 (ja) | 超音波診断装置、超音波プローブ駆動装置及び超音波プローブ | |
| US20220133134A1 (en) | Imaging and pressure sensing apparatus and probes with a slidable sheath | |
| US20160270669A1 (en) | Diagnostic imaging probe | |
| JP2014087711A (ja) | 画像診断装置及びその処理方法 | |
| JP2011194064A (ja) | 取付装置及び光画像診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10820081 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011534049 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010820081 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13499589 Country of ref document: US |