JP3965593B2 - 測量機の求心位置測定装置及び測量機 - Google Patents
測量機の求心位置測定装置及び測量機 Download PDFInfo
- Publication number
- JP3965593B2 JP3965593B2 JP20868998A JP20868998A JP3965593B2 JP 3965593 B2 JP3965593 B2 JP 3965593B2 JP 20868998 A JP20868998 A JP 20868998A JP 20868998 A JP20868998 A JP 20868998A JP 3965593 B2 JP3965593 B2 JP 3965593B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- light receiving
- surveying
- receiving means
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/02—Means for marking measuring points
- G01C15/06—Surveyors' staffs; Movable markers
- G01C15/08—Plumbing or registering staffs or markers over ground marks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C1/00—Measuring angles
- G01C1/02—Theodolites
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C5/00—Measuring height; Measuring distances transverse to line of sight; Levelling between separated points; Surveyors' levels
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【産業上の利用分野】
本発明は、測量機の求心位置測定装置等に係わり、特に、基準点に対するズレ量x、及びズレ量y、そして機械高さHを演算することのできる測量機の求心位置測定装置等に関するものである。
【0002】
【従来の技術】
一般に測量作業は、既知の基準点に基づいて行われる。測量機を基準点又は与点上に設置し、この基準点等に基づいて測量作業が実施される。例えば、経緯儀は、鉛直軸周り及び水平軸周りに回動自在に取り付けられた視準望遠鏡の視準方向を測定することにより測量を実施する。また水準儀は、視準位置の高低差を測量することができる。
【0003】
これらの測量機は、三脚に取り付けて使用するので、地上から視準望遠鏡までの高さ、高低計算に必要となる機械高さを測定する必要がある。
【0004】
図9は、三脚9000上に据え付けられた経緯儀9100と測標9200を表している。図9に示す様に測量機は正確な測量のため、基準点を通る鉛直線と測量機の鉛直回転軸が一致する様に据え付けられている。そして機械高さHを測定する基点は、望遠鏡の水平回転中心に一致する支架に設けられている。
【0005】
また図10に示す様に、測量機9100の鉛直回転軸と鉛直線を一致させるための鉛直回転軸の倒れを補正する整準機構9110と、水平位置を補正するための求心望遠鏡9120が設けられている。従って、測量機9100に設けられた求心望遠鏡9120は、反射プリズム9130で反射され、鉛直回転軸に一致する測量機下方を視準する様になっている。
【0006】
そして測量者は、基準点上に測量機9100を据え付け後、測量機9100の機械高さHを測定し、更に、測量機支架の基点から測標9200までを巻尺等で測定する。
【0007】
【発明が解決しようとする課題】
しかしながら、上記従来の測量機9100の機械高さHの測定は、巻尺により測量機下部から測標9200までの距離を測り、三脚据え付け部の厚み及び測量機の高さを加算することにより測定していた。従って測量機の高さは、整準によって変化するので、据え付け時に測定する必要があり、手間がかかる上、正確さを期待できないという問題点があった。
【0008】
そして、通常は基点から測標9200までを概略で直接計測するが、機械高さHを測定する基点が、基準点上に直接ない場合もあり、高精度が得られないという深刻な問題点があった。
【0009】
また、正確な測量及び機械高さHの測定のためには、測量機9100が、基準点鉛直上に据え付けられている必要がある。
【0010】
即ち、三脚3000上に据え付けられた測量機9100は、まず、整準機構9110により鉛直に設定される。次に、視準望遠鏡9120を視準しながら、測量機9100本体と三脚3000を固定する固定ネジ(図示せず)を少し緩め、測量機9100本体を基準点上に水平移動する。
【0011】
この作業は、極めて高い熟練を要し、細心の注意を払って作業を行わないと、測量機9100本体の整準が狂ったり、三脚3000が移動してしまうという問題点があった。
【0012】
近年では、測量機9100本体の測定精度が飛躍的に向上し、精度の高い測量が可能となっている。例えば、水平角及び高度角の測角精度が、5秒程度の測量機では、求心位置が5mmずれると、本体側では、100mで約10秒の誤差を生じてしまうこととなり、熟練者による高い精度の求心作業が要求されるという問題点があった。
【0013】
従って、熟練者でなくとも、高精度の機械高さHの測定が可能となる手段の出現が強く望まれている。
【0014】
【課題を解決するための手段】
本発明は上記課題に鑑み案出されたもので、測量地点を特定するため、この測量地点に設置されたターゲットの像を形成するための光学手段と、このターゲット像を受光するための受光手段と、この受光手段からのターゲット像の受光信号に基づき、前記ターゲットまでの距離である機械高さを演算するための演算処理手段とからなり、前記ターゲットが同心円状に形成され、前記受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、前記演算処理手段が、前記交点の位置から、前記各円像の直径を算出し、この直径の値から対応する機械高さを演算する構成となっている。
【0015】
そして本発明は、測量地点を特定するため、この測量地点に設置されたターゲットの像を形成するための光学手段と、このターゲット像を受光するための受光手段と、この受光手段からのターゲット像の受光信号に基づき、前記測量地点からのズレ量を演算するための演算処理手段とからなり、前記ターゲットが、同心円状に形成され、前記受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、前記演算処理手段が、前記交点の位置から、X軸方向のズレ量又はY軸方向のズレ量を演算する構成となっている。
【0016】
また本発明の受光手段は、第1の受光手段と、この第1の受光手段と直交して受光可能に配置されている第2の受光手段とから構成することもできる。
【0017】
そして本発明は、測定値を、ターゲットをおいた測定点からの値に補正する構成にすることもできる。
【0024】
【発明の実施の形態】
以上の様に構成された本発明は、光学手段が、測量地点を特定するため、この測量地点に設置されたターゲットの像を形成し、受光手段が、ターゲット像を受光し、この受光手段からのターゲット像の受光信号に基づき、演算処理手段が、ターゲットまでの距離である機械高さを演算する様になっており、ターゲットを同心円状に形成し、受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、演算処理手段が、交点の位置から、各円像の直径を算出し、この直径の値から対応する機械高さを演算する構成となっている。
【0025】
そして本発明は、光学手段が、測量地点を特定するため、この測量地点に設置されたターゲットの像を形成し、受光手段が、ターゲット像を受光し、この受光手段からのターゲット像の受光信号に基づき、演算処理手段が、測量地点からのズレ量を演算する様になっており、ターゲットを同心円状に形成し、受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、演算処理手段が、交点の位置から、X軸方向のズレ量又はY軸方向のズレ量を演算する構成となっている。
【0026】
また本発明の受光手段は、第2の受光手段が、この第1の受光手段と直交して受光可能に配置することもできる。
【0027】
そして本発明は、測定値を、ターゲットをおいた測定点からの値に補正することもできる。
【0034】
【実施例】
【0035】
本発明の実施例を図面に基づいて説明する。
【0036】
図1は、測量機本体1000と測標2000とを説明する図であり、測量機本体1000には求心望遠鏡1100が取り付けられており、測標2000には機械高さ測定ターゲット2100が形成されている。
【0037】
なお図1の状態は、測量機本体1000の整準作業が完了しており、求心望遠鏡1100による求心作業の前の状態である。
【0038】
機械高さ測定ターゲット2100は、測標2000の中心に一致する様に形成されている。なお機械高さ測定ターゲット2100は、ターゲットに該当するものである。
【0039】
測量機本体1000の底部の回転中心には、視準光を通過させるための穴部1200が形成されており、測量機本体1000の鉛直回転中心の位置には、視準光を直角に偏向させるための反射プリズム1300が取り付けられている。
【0040】
また整準台3100には、三脚3000と固定するための固定ネジ3110が形成されている。
【0041】
基準点上に配置された機械高さ測定ターゲット2100からの視準光は、固定ネジ3110の中心を通って、測量機本体1000の穴部1200から視準される。
【0042】
そして、穴部1200を通過した視準光は、反射プリズム1300で反射され、求心望遠鏡1100に向かう様になっており、求心望遠鏡1100では、視準光と測定光とを分割する様に構成されている。
【0043】
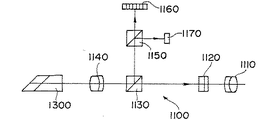
次に図2に基づいて、求心望遠鏡1100の光学的構成を説明する。
【0044】
求心望遠鏡1100は、接眼レンズ1110と、レクチル1120と、第1のビームスプリッタ1130と、対物レンズ1140と、第2のビームスプリッタ1150と、第1のCCD1160と、第2のCCD1170とを備えている。
【0045】
対物レンズ1140は、反射プリズム1300を介して、測標2000の機械高さ測定ターゲット2100の像(以下、ターゲット像と称する)を形成するためのものである。即ち対物レンズ1140は、十字線を備えたレクチル1120上にターゲット像を形成するものである。なお、対物レンズ1140とレクチル1120とは、光学手段に該当するものである。
【0046】
測量者は、接眼レンズ1110により、レクチル1120上に形成されたターゲット像を視準することができる。
【0047】
対物レンズ1140とレクチル1120との間には、第1のビームスプリッタ1130が挿入されており、第1のビームスプリッタ1130は、視準光を透過させてレクチル1120に向かわせると共に、一部の光を直角上方に反射させて測定光を形成させる様になっている。第1のビームスプリッタ1130で反射された測定光は、上方に配置された第2のビームスプリッタ1150により、第1測定光と第2測定光とに分離される。
【0048】
即ち、第1のビームスプリッタ1130からの測定光は、第2のビームスプリッタ1150を透過されたものが第1測定光となり、第2のビームスプリッタ1150で反射されて90度偏向されたものが、第2測定光となる。
【0049】
第1測定光は、第1の受光手段である第1のCCD1160に入射され、第2測定光は、第2の受光手段である第2のCCD1170に入射される様に構成されている。
【0050】
なお、第1のCCD1160と第2のCCD1170とは、レクチル1120と共役の位置にある。
【0051】
次に、機械高さHの測定の原理を説明する。
【0052】
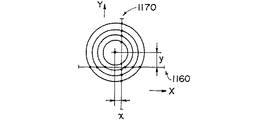
本実施例の機械高さ測定ターゲット2100は、図1に示す様に同心円状に形成されている。図3は、レクチル1120上に現れたターゲット像である。
【0053】
ここで、第1のCCD1160と第2のCCD1170とは、直交して受光する様に配置されているので、第1のCCD1160は、図3のX軸方向の位置を計測することができ、第2のCCD1170は、図3のY軸方向の位置を計測することができる。即ち図3は、レクチル1120上に現れたターゲット像と、第1のCCD1160と第2のCCD1170の位置とを、重ね合わせた状態を示すものである。
【0054】
そして、機械高さ測定ターゲット2100の中心である基準点からのX方向のズレ量をxとし、Y方向のズレ量をyとすれば、ズレ量xは、各円像(ターゲット像の同心円の内、それぞれの各円像)のX軸とのクロス点の内、1つだけ違った間隔をもつクロス点の中点の位置と、予め決められているX軸の0点との距離を演算すればよいことになる。なお、この演算は適宜の演算処理手段により実行される。
【0055】
同様にして、ズレ量yは、各円像(ターゲット像の同心円の内、それぞれの各円像)のY軸とのクロス点の内、1つだけ違った間隔をもつクロス点の中点の位置と、予め決められているY軸の0点との距離を演算すればよいことになる。更に、ズレ量x又はズレ量y、及びクロス点の1/2距離を3平方の定理に適用すれば、ターゲットの、特定の円像の半径を算出することができる。
【0056】
また、X軸又はY軸とクロスする交点の数及び、交点の間隔を検出することにより、各円像の円周は既知であることから、第1のCCD1160又は第2のCCD1170を横切る円周の直径を算出することができる。
【0057】
更に、2つのゼロクロス点の距離の1/2(1/2距離)も容易に計測できるので、特定の円像の半径と、(1/2距離)とを、3平方の定理に適用すれば、ズレ量x、及びズレ量yとを算出することができる。
【0058】
そしてターゲットの各円像の円周の直径は既知であるから、機械高さ測定ターゲット2100までの距離である機械高さHは、ターゲット像の光学的な倍率を用いて換算すれば、簡便に求めることができる。
【0059】
なお本実施例では、第1の受光手段と第2の受光手段の2つの受光手段を採用しているが、1方向測定後、測量機本体1000又は受光素子を90度回転させることにより、1つの受光手段でも実現可能である。
【0060】
以上の様に計測したズレ量x、及びズレ量y、そして機械高さHは、測量機本体1000に設けられた適宜の表示部1400に表示することができる。
【0061】
本実施例の機械高さ測定ターゲット2100は、同心円状に形成されているが、同心円状に限定されるものではなく、図4に示す様に、矩形にすることもできる。また図4は、第1の受光手段と第2の受光手段とが、矩形の中心線と直交する様に構成されているが、回転している場合にも同様に適用することができる。
【0062】
即ち、第1の受光手段と第2の受光手段の交点から、abとcdの長さを比較することにより、X方向のズレ量を算出することができる。また、第1の受光手段と第2の受光手段の交点の位置からY方向のズレ量を算出することができる。
【0063】
更に、回転し傾いている場合には、第1の受光手段と第2の受光手段の交点の位置から、回転量を算出し、そしてズレ量を演算することができる。また、測量機本体1000を回転してズレを補正してもよい。
【0064】
そして機械高さHは、ターゲットの矩形の大きさが既知であるので、第1の受光手段と第2の受光手段の受光位置からの比率により、機械高さ測定ターゲット2100までの距離である機械高さHを算出することができる。
【0065】
同様に、図5の様な機械高さ測定ターゲット2100を採用することもできる。
【0066】
図6は、受光手段が1つの場合であり、W状のターゲット像を横切る様に受光手段が配置されている。回転している場合には、交点ab、交点bc、交点cdの間隔は、それぞれ異なることになる。従って、X方向のズレ量は、交点ab、交点bcの間隔から算出することができ、Y方向のズレ量は、受光位置から同様に算出することができる。
【0067】
なお、現在最も多く使用される測量機であるトータルステーションは、電気的に水平角、高度角を測定すると共に、光波距離計を内蔵して距離の測定も可能となっている。この様なトータルステーションは、高速な演算手段が既に内蔵されており、求心位置のズレ量及び機械高さHを取り込み、測定値を瞬時に補正可能となっている。
【0068】
この様に構成されたトータルステーションは、本体を基準点上に概略設置すれば、自動的に、求心位置のズレ量及び機械高さHを取り込んで、補正された真の測定値を表示することができる。この様なトータルステーションは、角度検出手段には、光透過式エンコーダが用いられ、受光手段の受光信号を処理するための演算手段が内蔵されている。このため、ターゲット像の受光手段の受光信号を処理するための演算手段を追加する必要はない。
【0069】
ここで、具体的な使用方法を図7に基づいて説明する。
【0070】
まず、ステップ1(以下、S1と略する)で、測量機本体1000を据え付ける。次に、S2に進み、整準作業を完了させる。
【0071】
そしてS3では、基準点に機械高さ測定ターゲット2100を設置する。次にS4では、測量者が、測量機本体1000の概略の求心位置合わせを行う。更にS5では、上述の方法により、ズレ量x、及びズレ量y、そして機械高さHを測定する。
【0072】
S5で測定された測定値は、S6で、測量機本体1000の記憶手段に記憶させる。そしてS7では、S6で記憶された測定値を、測量機本体1000の適宜の表示部1400に表示する。
【0073】
更に、測量機本体1000がトータルステーションの場合は、S8で、測距、測角作業を実施し、S9では、S6で記憶された測定値(ズレ量x、ズレ量y、機械高さH)を利用して、S8で求めた距離、角度の補正値を演算する。そしてS10では、S9で求めた補正値を図8で示すトータルステーションの適宜の表示部1400に表示する。
【0074】
なお、S8の測距は、適宜の光波距離計を使用することができ、S8の測角は、例えば図8の高度角エンコーダ1510により高度角を測定し、水平角エンコーダ1520により水平角を測定する構成にすることもできる。
【0075】
また、求心位置をレーザー光で示すレーザー求心装置と組み合わせれば、概略の位置合わせを行えばよく、更に、作業能率が向上するという効果がある。
【0076】
【効果】
以上の様に構成された本発明は、測量地点を特定するため、この測量地点に設置されたターゲットの像を形成するための光学手段と、このターゲット像を受光するための受光手段と、この受光手段からのターゲット像の受光信号に基づき、前記ターゲットまでの距離である機械高さを演算するための演算処理手段とからなり、前記ターゲットが同心円状に形成され、前記受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、前記演算処理手段が、前記交点の位置から、前記各円像の直径を算出し、この直径の値から対応する機械高さを演算する様に構成されているので、熟練者でなくとも、高い精度で測量作業を行うことができるという卓越した効果がある。
【0077】
そして本発明は、測量地点を特定するため、この測量地点に設置されたターゲットの像を形成するための光学手段と、このターゲット像を受光するための受光手段と、この受光手段からのターゲット像の受光信号に基づき、前記測量地点からのズレ量を演算するための演算処理手段とからなり、前記ターゲットが、同心円状に形成され、前記受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、前記演算処理手段が、前記交点の位置から、X軸方向のズレ量又はY軸方向のズレ量を演算する様に構成されているので、作業能率が向上するのみならず、正確な測量を実現することができるという卓越した効果がある。
【図面の簡単な説明】
【図1】本発明の実施例である測量機本体1000と測標2000とを説明する図である。
【図2】求心望遠鏡1100の光学的構成を説明する図である。
【図3】本実施例の原理を説明する図である。
【図4】本実施例の原理を説明する図である。
【図5】本実施例の原理を説明する図である。
【図6】本実施例の原理を説明する図である。
【図7】本実施例の作用を説明する図である。
【図8】トータルステーションの表示部1400を説明する図である。
【図9】従来技術を説明する図である。
【図10】従来技術を説明する図である。
【符号の説明】
1000 測量機本体
1100 求心望遠鏡
1110 接眼レンズ
1120 レクチル
1130 第1のビームスプリッタ
1140 対物レンズ
1150 第2のビームスプリッタ
1160 第1のCCD
1170 第2のCCD
1200 穴部
1300 反射プリズム
1400 表示部
1510 高度角エンコーダ
1520 水平角エンコーダ
2000 測標
2100 機械高さ測定ターゲット
3000 三脚
3100 整準台
3110 固定ネジ
Claims (4)
- 測量地点を特定するため、この測量地点に設置されたターゲットの像を形成するための光学手段と、このターゲット像を受光するための受光手段と、この受光手段からのターゲット像の受光信号に基づき、前記ターゲットまでの距離である機械高さを演算するための演算処理手段とからなり、前記ターゲットが同心円状に形成され、前記受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、前記演算処理手段が、前記交点の位置から、前記各円像の直径を算出し、この直径の値から対応する機械高さを演算する測量機の求心位置測定装置。
- 測量地点を特定するため、この測量地点に設置されたターゲットの像を形成するための光学手段と、このターゲット像を受光するための受光手段と、この受光手段からのターゲット像の受光信号に基づき、前記測量地点からのズレ量を演算するための演算処理手段とからなり、前記ターゲットが、同心円状に形成され、前記受光手段が、同心円状のターゲットによる各円像のX軸又はY軸との交点を検出する受光信号を形成し、前記演算処理手段が、前記交点の位置から、X軸方向のズレ量又はY軸方向のズレ量を演算する測量機の求心位置測定装置。
- 受光手段が、第1の受光手段と、この第1の受光手段と直交して受光可能に配置されている第2の受光手段とから構成されている請求項1又は請求項2記載の測量機の求心位置測定装置。
- 測定値を、ターゲットをおいた測定点からの値に補正する請求項1又は請求項2記載の測量機の求心位置測定装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20868998A JP3965593B2 (ja) | 1998-07-08 | 1998-07-08 | 測量機の求心位置測定装置及び測量機 |
| DE69934940T DE69934940T2 (de) | 1998-07-08 | 1999-07-07 | Vermessungsinstrument mit Lot |
| EP99113565A EP0971207B1 (en) | 1998-07-08 | 1999-07-07 | Surveying instrument having a plumbing device |
| US09/348,211 US6453569B1 (en) | 1998-07-08 | 1999-07-08 | Surveying instrument and plumbing device for plumbing surveying instrument |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20868998A JP3965593B2 (ja) | 1998-07-08 | 1998-07-08 | 測量機の求心位置測定装置及び測量機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000028362A JP2000028362A (ja) | 2000-01-28 |
| JP3965593B2 true JP3965593B2 (ja) | 2007-08-29 |
Family
ID=16560452
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP20868998A Expired - Fee Related JP3965593B2 (ja) | 1998-07-08 | 1998-07-08 | 測量機の求心位置測定装置及び測量機 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6453569B1 (ja) |
| EP (1) | EP0971207B1 (ja) |
| JP (1) | JP3965593B2 (ja) |
| DE (1) | DE69934940T2 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2292249C (en) * | 1999-11-19 | 2007-05-22 | Darrell G. B. Cline | Hydrant monument |
| JP4317639B2 (ja) * | 2000-03-29 | 2009-08-19 | 株式会社トプコン | レーザ測量機 |
| JP4588240B2 (ja) * | 2001-04-04 | 2010-11-24 | 株式会社トプコン | 求心案内装置 |
| JP3840119B2 (ja) * | 2002-02-08 | 2006-11-01 | 株式会社ソキア | レーザ求心装置 |
| JP4424665B2 (ja) * | 2004-07-30 | 2010-03-03 | 株式会社 ソキア・トプコン | 測量機 |
| AU2007214177B2 (en) * | 2006-02-08 | 2012-09-27 | Leica Geosystems Ag | Angle measuring device |
| WO2008077432A1 (en) * | 2006-12-27 | 2008-07-03 | Trimble Ab | Geodetic instrument and related method |
| US7748126B2 (en) * | 2007-10-17 | 2010-07-06 | Jianhong Lu | Laser straight liner |
| EP2247921B1 (en) | 2008-02-12 | 2014-10-08 | Trimble AB | Determining coordinates of a target in relation to a survey instruments having a camera |
| WO2009100774A1 (en) * | 2008-02-12 | 2009-08-20 | Trimble Ab | Localizing a surveying instrument in relation to a ground mark |
| EP2247922B1 (en) | 2008-02-29 | 2015-03-25 | Trimble AB | Determining coordinates of a target in relation to a survey instrument having at least two cameras |
| US8897482B2 (en) | 2008-02-29 | 2014-11-25 | Trimble Ab | Stereo photogrammetry from a single station using a surveying instrument with an eccentric camera |
| CN102128636A (zh) * | 2010-12-22 | 2011-07-20 | 王四明 | 垂直度盘偏心校正方法 |
| DE102011002696A1 (de) * | 2011-01-14 | 2012-07-19 | Homag Holzbearbeitungssysteme Gmbh | Bearbeitungsvorrichtung |
| US8539685B2 (en) | 2011-01-20 | 2013-09-24 | Trimble Navigation Limited | Integrated surveying and leveling |
| CN105300345B (zh) * | 2015-11-10 | 2017-09-12 | 中国科学院长春光学精密机械与物理研究所 | 光电经纬仪多目标跟踪方法 |
| CN105973191B (zh) * | 2016-06-16 | 2018-05-29 | 中国科学院西安光学精密机械研究所 | 一种多负载通用式跟踪平台 |
| EP3264034B1 (de) | 2016-06-30 | 2020-02-26 | Leica Geosystems AG | Vermessungsgerät mit höhenmesssystem und verfahren zum messen einer höhe |
| CN106403916B (zh) * | 2016-12-02 | 2018-10-02 | 淮阴工学院 | 基于数码图像测定对中点的全站仪及其工作方法 |
| CN107727119B (zh) * | 2017-12-08 | 2023-09-29 | 江西省测绘成果质量监督检验测试中心 | 全站仪测距三轴重合度室内式检测调整装置 |
| JP6996961B2 (ja) * | 2017-12-19 | 2022-01-17 | 株式会社トプコン | 測量装置 |
| CN108507531B (zh) * | 2018-04-18 | 2019-12-20 | 湖南科技大学 | 全站仪仪器高激光测量系统与使用方法 |
| EP3660451B1 (de) * | 2018-11-28 | 2022-04-27 | Hexagon Technology Center GmbH | Intelligentes stationierungs-modul |
| CN109974673B (zh) * | 2019-03-11 | 2024-03-15 | 中国人民解放军63883部队 | 多功能快速精瞄对点器 |
| RU2730370C1 (ru) * | 2019-10-21 | 2020-08-21 | Федеральное государственное унитарное предприятие "Научно-производственный центр автоматики и приборостроения имени академика Н.А. Пилюгина" (ФГУП "НПЦАП") | Автоматизированный прибор привязки к обратным отвесам |
| JP7438881B2 (ja) * | 2020-07-29 | 2024-02-27 | 株式会社トプコン | 整準台及び測量装置及び測量システム |
| CN112483825B (zh) * | 2020-11-12 | 2021-10-29 | 武汉理工大学 | 一种自动校准调平的经纬仪 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4171907A (en) * | 1978-05-25 | 1979-10-23 | Cubic Western Data | Electro-optic distance measuring device |
| JPS6065870A (ja) * | 1983-09-19 | 1985-04-15 | 大成建設株式会社 | 柱建入垂直検出装置 |
| CH672024A5 (ja) * | 1987-03-02 | 1989-10-13 | Wild Leitz Ag Optik Feinmechan | |
| SE500856C2 (sv) * | 1989-04-06 | 1994-09-19 | Geotronics Ab | Arrangemang att användas vid inmätnings- och/eller utsättningsarbete |
| DE4007245C2 (de) * | 1990-03-08 | 1999-10-14 | Leica Geosystems Ag | Einrichtung zum Zentrieren eines geodätischen Instrumentes über einem definierten Bodenpunkt |
| US5218770A (en) * | 1990-11-27 | 1993-06-15 | Asahi Seimitsu Kabushiki Kaisha | Surveying machine for construction work |
| JP3226970B2 (ja) * | 1992-07-09 | 2001-11-12 | 株式会社トプコン | レーザ測量機 |
| US5392521A (en) * | 1993-06-10 | 1995-02-28 | Allen; Michael P. | Surveyor's prism target |
| JP3681198B2 (ja) * | 1995-05-25 | 2005-08-10 | 株式会社トプコン | レーザ測量機 |
| JP3670075B2 (ja) * | 1996-03-06 | 2005-07-13 | 株式会社トプコン | 適正高さ表示装置 |
| JPH09257481A (ja) * | 1996-03-26 | 1997-10-03 | Nikon Corp | 器械高測定アタッチメント付き測量機 |
| US5949548A (en) * | 1997-01-22 | 1999-09-07 | Asahi Kogaku Kogyo Kabushiki Kaisha | Height sensing measurement device |
| JP3731021B2 (ja) * | 1997-01-31 | 2006-01-05 | 株式会社トプコン | 位置検出測量機 |
| DE19716304C1 (de) * | 1997-04-18 | 1998-05-20 | Zeiss Carl Jena Gmbh | Geodätisches Gerät |
-
1998
- 1998-07-08 JP JP20868998A patent/JP3965593B2/ja not_active Expired - Fee Related
-
1999
- 1999-07-07 DE DE69934940T patent/DE69934940T2/de not_active Expired - Lifetime
- 1999-07-07 EP EP99113565A patent/EP0971207B1/en not_active Expired - Lifetime
- 1999-07-08 US US09/348,211 patent/US6453569B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE69934940T2 (de) | 2007-05-24 |
| US6453569B1 (en) | 2002-09-24 |
| EP0971207A1 (en) | 2000-01-12 |
| DE69934940D1 (de) | 2007-03-15 |
| JP2000028362A (ja) | 2000-01-28 |
| EP0971207B1 (en) | 2007-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3965593B2 (ja) | 測量機の求心位置測定装置及び測量機 | |
| CN100580374C (zh) | 激光测定方法及激光测定系统 | |
| US7200945B2 (en) | Surveying instrument | |
| CN1071898C (zh) | 测量球-反射器 | |
| US11566897B2 (en) | Surveying instrument and method of calibrating a survey instrument | |
| US6055046A (en) | System and method for aligning a laser transmitter | |
| GB2354321A (en) | Geodetic device with a laser arrangement | |
| RU2463561C1 (ru) | Устройство для определения погрешности измерений горизонтальных и вертикальных углов геодезических угломерных приборов | |
| JPH09280859A (ja) | 傾斜センサ及びこれを使用した測量機 | |
| JP2945467B2 (ja) | 機械高測定装置 | |
| US4738532A (en) | Method of calibrating an optical measuring system | |
| CN111707229A (zh) | 一种定位定向设备的直角棱镜俯仰和方位角测量调节方法 | |
| JP3718312B2 (ja) | 機械高測定装置 | |
| EP3249352B1 (en) | Optical device, focal plate incorporated in optical device, and measuring method using optical device | |
| JP3481324B2 (ja) | 測量機の機械高測定方法および測定器 | |
| JPH10293029A (ja) | 機械高測定機能付測量機 | |
| JPS6046410A (ja) | 測量装置 | |
| JPH01184411A (ja) | 測高測距計 | |
| RU1573985C (ru) | Хранитель направления | |
| JP2000074670A (ja) | 測量装置の機器高測定装置 | |
| JP3092302B2 (ja) | 光波測距システム | |
| RU1400226C (ru) | Способ определения кручения объекта | |
| JP2916977B2 (ja) | 偏心補正機能を備えた測量機 | |
| JP3000450B2 (ja) | 電子測板 | |
| SU849005A1 (ru) | Устройство дл измерени угла междуНАпРАВлЕНи Ми HA ВизиРНыЕ цЕли |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070213 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070412 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070516 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100608 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110608 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110608 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120608 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120608 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130608 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |