WO2025094269A1 - 情報収集分析装置および情報収集分析システム - Google Patents
情報収集分析装置および情報収集分析システム Download PDFInfo
- Publication number
- WO2025094269A1 WO2025094269A1 PCT/JP2023/039271 JP2023039271W WO2025094269A1 WO 2025094269 A1 WO2025094269 A1 WO 2025094269A1 JP 2023039271 W JP2023039271 W JP 2023039271W WO 2025094269 A1 WO2025094269 A1 WO 2025094269A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- event
- individual
- vehicle
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
Definitions
- This disclosure relates to technology for collecting and analyzing information on unusual events that occur in a vehicle, including lane departures or LKAS operation.
- Patent Document 1 describes a system that collects information on uncontrollable locations where the LKAS (Lane Keeping Assist System) does not function, and, based on the information on the uncontrollable locations, determines locations where the LKAS frequently does not function as anomalous locations and presents them to the driver.
- LKAS Lane Keeping Assist System
- This disclosure has been made to solve the above problems, and aims to provide technology that can perform detailed analysis of the causes of unusual events occurring in vehicles.
- the information collection and analysis device disclosed herein includes an information collection unit that collects probe information linked to information on a peculiar event including lane departure or LKAS operation from a vehicle capable of automatic driving control by an automatic driving control device when the peculiar event occurs and information on a driving mode that indicates the degree of automatic driving control at the time of the occurrence of the peculiar event, and an analysis unit that identifies the cause of the peculiar event as a cause classification based on the driving mode and creates attention-requiring information that links the peculiar event with the cause classification, and the driving modes include a first driving mode in which the driver operates the steering wheel of the vehicle and the automatic driving control device does not perform steering, a second driving mode in which the driver normally operates the steering wheel and intervenes in steering and executes LKAS when the automatic driving control device detects a risk of lane departure, and a third driving mode in which the automatic driving control device always controls the steering wheel operation of the vehicle.
- FIG. 1 is a block diagram showing a configuration of an information collection and analysis system according to a first embodiment.
- 4 is a flowchart showing an operation of the probe information generating device.
- 13 is a flowchart showing an information collection process performed by the information collection and analysis device.
- FIG. 4 is a diagram showing probe information according to the first embodiment;
- 13 is a flowchart showing an environmental analysis process performed by the information collection and analysis device.
- FIG. 1 is a diagram showing the relationship between singular points and general singular points.
- FIG. 13 is a diagram showing the relationship between environmental cause events and environmental cause classifications.
- FIG. 13 is a diagram showing caution-required information stored in a cause storage unit.
- FIG. 11 is a block diagram showing a configuration of an information collection and analysis system according to a second embodiment.
- FIG. 13 is a flowchart showing an individual analysis process performed by the information collection and analysis device.
- FIG. 13 is a diagram showing the relationship between individual cause events and individual cause classifications.
- FIG. 13 is a block diagram showing a configuration of an information collection and analysis system according to a third embodiment.
- FIG. 13 is a block diagram showing a configuration of an information collection and analysis system according to a fourth embodiment.
- FIG. 13 is a diagram showing an example of cause information displayed in a vehicle.
- FIG. 2 is a diagram illustrating a hardware configuration of an information collection and analysis device or a probe information generation device.
- FIG. 2 is a diagram illustrating a hardware configuration of an information collection and analysis device or a probe information generation device.
- Fig. 1 is a block diagram showing the configuration of an information collection and analysis system 1001 according to embodiment 1.
- the information collection and analysis system 1001 is configured to include a plurality of vehicles 100, an information collection and analysis device 201, and a wide area communication network 301 that connects each vehicle 100 to the information collection and analysis device 201. Although only one vehicle 100 is shown in Fig. 1, the information collection and analysis system 1001 includes a plurality of vehicles 100.
- the vehicle 100 is configured with a probe information generating device 101, a positioning device 51, a surrounding detection device 52, and an automatic driving control device 53.
- a probe information generating device 101 creates probe information and transmits it to the information collection and analysis device 201.
- the positioning device 51 measures the position of the vehicle 100.
- the positioning device 51 may be configured with a GNSS receiver, or may have a mechanism for correcting the position measured by the GNSS receiver using a vehicle sensor or map matching, etc.
- the perimeter detection device 52 detects lane departure by image processing. However, the perimeter detection device 52 only needs to be able to detect lane departure, and the method is not limited to image processing.
- the automatic driving control device 53 controls the automatic driving of the vehicle.
- the automatic driving control device 53 has at least an LKAS function.
- the probe information generating device 101 is configured with a position information acquiring unit 11, a lane departure detecting unit 12, a control information acquiring unit 13, a probe information generating unit 14, and a probe information transmitting unit 15.
- the location information acquisition unit 11 acquires vehicle location information from the positioning device 51 and outputs it to the probe information generation unit 14.
- the lane departure detection unit 12 obtains information on whether lane departure has occurred from the surrounding detection device 52 and outputs it to the probe information generation unit 14.
- the control information acquisition unit 13 acquires control information indicating the content of the automatic driving control by the automatic driving control device 53, and driving mode information indicating the driving mode of the vehicle 100, from the automatic driving control device 53.
- the control information includes information on whether the LKAS has functioned.
- the control information acquisition unit 13 functions as an information acquisition unit that acquires the driving mode and the operating status of the LKAS.
- the driving mode indicates the degree of automatic driving control by the automatic driving control device 53, and there are the following three driving modes.
- the first driving mode is a mode in which the driver operates the steering wheel and the automatic driving control device 53 does not intervene in the steering operation.
- the second driving mode is a mode in which the driver operates the steering wheel and, if the automatic driving control device 53 determines that the vehicle 100 is at risk of leaving its lane, intervenes in the steering operation and executes the LKAS.
- the third driving mode is a mode in which the driver does not operate the steering wheel and the automatic driving control device 53 performs steering control to keep the vehicle within the lane. Note that at least automatic driving level 3 and above as defined by the Society of Automotive Engineers (SAE) belongs to the third driving mode.
- SAE Society of Automotive Engineers
- the probe information generating unit 14 recognizes that the vehicle 100 has departed from its lane based on information from the lane departure detecting unit 12.
- the probe information generating unit 14 also recognizes that the LKAS has been activated in the vehicle 100 based on control information acquired from the control information acquiring unit 13.
- the lane departure of the vehicle 100 or the activation of the LKAS in the vehicle 100 is referred to as an unusual event.
- the probe information generating unit 14 detects that an unusual event has occurred in the vehicle 100, it generates probe information including the position information of the unusual point where the unusual event occurred, and transmits the probe information to the information collecting and analyzing device 201.
- the information collection and analysis device 201 is configured from a server outside the vehicle 100.
- the information collection and analysis device 201 is configured with an information collection unit 21, a collected information storage unit 22, an analysis unit 23, and a cause storage unit 24.
- the information collection unit 21 collects probe information from multiple vehicles 100 and stores it in the collected information storage unit 22.
- the analysis unit 23 analyzes the probe information stored in the collected information storage unit 22 at any timing, and classifies the cause of the occurrence of a peculiar event based on the peculiar event and the operating mode at the time the peculiar event occurred.
- the causes of the occurrence of a peculiar event classified by the analysis unit 23 are called cause classifications.
- the analysis unit 23 links the peculiar event with its cause classification to create caution information.
- the analysis unit 23 classifies the cause of a driving environment causal event, which is a unique event caused by the driving environment, into an environmental cause classification.
- a driving environment causal event is not caused by a cause specific to the vehicle 100 or its driver, but is caused by the driving environment, such as the road shape, and can occur in other vehicles 100 in the same driving environment.
- the analysis unit 23 links the driving environment causal event with the environmental cause classification, and creates environmental caution information, which is caution-required information related to the driving environment causal event.
- the cause storage unit 24 includes an environmental cause storage unit 25.
- the environmental cause storage unit 25 stores the environmental caution information created by the analysis unit 23.
- Operation> 2 is a flowchart showing the operation of the probe information generating device 101. The operation of the probe information generating device 101 will be described below with reference to the flow of FIG.
- the probe information generating unit 14 acquires a vehicle ID from an in-vehicle LAN not shown in FIG. 1.
- the vehicle ID is an example of an individual ID for uniquely identifying the vehicle 100 or the driver of the vehicle 100.
- a personal ID unique to the driver may be used.
- step S102 the position information acquisition unit 11 acquires the position information of the vehicle 100 from the positioning device 51.
- step S103 the control information acquisition unit 13 acquires driving mode information indicating the driving mode currently being executed from the automatic driving control device 53.
- step S104 the probe information generation unit 14 determines whether or not a special event has occurred, including lane departure of the vehicle 100 or LKAS operation.
- the occurrence of lane departure is determined by the lane departure detection unit 12 based on information from the perimeter detection device 52, which performs white line recognition, for example.
- the LKAS operation state is determined by the control information acquisition unit 13 based on control information acquired from the automatic driving control device 53.
- the unique events that can occur in the vehicle 100 are divided into three unique events A, B, and C.
- Unique event A is an event in which the LKAS does not operate and lane departure occurs.
- the unique point where unique event A occurs is the lane departure position.
- Unique event A can occur in the first driving mode, the second driving mode, and the third driving mode.
- Unique event B is an event in which the LKAS operates but lane departure occurs.
- the unique point where unique event B occurs may be the lane departure position or the LKAS operation position.
- Unique event A can occur in the second driving mode and the third driving mode.
- Unique event C is an event in which the LKAS operates and lane departure does not occur.
- the unique point where unique event C occurs is the LKAS operation position.
- Unique event C can occur in the second driving mode.
- the third driving mode the vehicle 100 is steered and controlled by the automatic driving control device 53 to travel near the center of the lane, so the LKAS does not operate.
- step S104 the processing of the probe information generating device 101 proceeds to step S105.
- the probe information generating unit 14 generates probe information Prove (P, EV, V, M) by associating the position P of the singular point where the singular event occurred, the singular event EV, the vehicle ID V, and the driving mode M.
- the probe information transmitting unit 15 transmits the probe information to the information collection and analysis device 201.
- the probe information may include the time T at which the singular event occurred and additional information INFO.
- the additional information INFO includes information such as driving environment information, weather information, vehicle speed/steering, and brake/accelerator operation.
- step S105 the processing of the probe information generating unit 14 proceeds to step S106.
- step S106 the probe information generating unit 14 determines whether or not the vehicle 100 has finished traveling. If the vehicle 100 has not finished traveling in step S106, the processing of the probe information generating device 101 returns to step S102. If the vehicle 100 has finished traveling in step S106, the processing of the probe information generating device 101 ends.
- the probe information generating unit 14 transmits the probe information in step S105, but the transmission timing is not limited to this.
- the probe information generating unit 14 may transmit multiple pieces of probe information that have been created up to that point together when the vehicle 100 finishes traveling.
- the information collection and analysis device 201 executes the multitasking of information collection processing and cause analysis processing.
- the processing program for executing each function of the information collection and analysis device 201 may be configured as a single task, or may be configured as three or more tasks.
- the processing program may be configured in any way, such as multi-process or multi-thread.
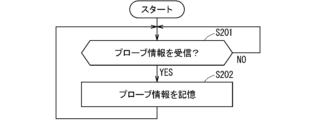
- FIG. 3 is a flowchart of the information collection process by the information collection and analysis device 201.
- the information collection process by the information collection and analysis device 201 will be described below with reference to FIG. 3.
- the information collection unit 21 determines whether or not it has received probe information from the vehicle 100, and repeats the process of step S201 until it receives probe information.
- the information collection unit 21 receives probe information from the vehicle 100 in step S201, it stores the probe information in the collection information storage unit 22 in step S202. Thereafter, the process of the information collection unit 21 returns to step S201.
- FIG. 4 illustrates an example of N pieces of probe information stored in the collected information storage unit 22.
- the probe information is assigned an information ID for identifying the probe information. For example, a number in the chronological order in which the probe information was collected is assigned to this information ID.
- the probe information Probe(n) includes the time T(n) and additional information INFO(n), which will be described later in a modified example.
- FIG. 5 is a flowchart of the environmental cause analysis process by the information collection and analysis device 201.
- the environmental cause analysis process by the information collection and analysis device 201 will be described below with reference to FIG. 5.
- the analysis unit 23 determines whether or not it is now the timing to analyze, and if it is, proceeds to the process of step S302, and if it is not the timing to analyze, repeats the process of step S301.
- the analysis timing may be a fixed cycle, such as once a day or once a week.
- the analysis timing may also be the timing when the information collection unit 21 obtains special probe information, such as information that lane departure has occurred without the LKAS being activated.
- the analysis timing may also be the point in time when an analysis instruction is obtained from a server administrator (not shown).
- the analysis unit 23 loads probe information such as that shown in FIG. 4 from the collected information storage unit 22, and extracts general peculiar points Q(m) from the probe information acquired from the multiple vehicles 100. Specifically, the analysis unit 23 defines a point where peculiar points frequently occur in multiple vehicles as a general peculiar point Q(m), and counts the number MD of general peculiar points Q(m).
- a "point where peculiar points frequently occur” is, for example, a point where a peculiar event occurs Mmin times (e.g., 4 times) or more within a certain period (e.g., one day) and the occurrence rate is 100 ppm or more.
- the occurrence rate of a peculiar event at point A is calculated by dividing the number of vehicles 100 where a peculiar event occurred at point A in a certain period TA by the number of vehicles 100 that traveled through point A in period TA.
- the analysis unit 23 can obtain the number of vehicles 100 that traveled through point A during period TA from VICS (Vehicle Information and Communication System, registered trademark) or the like.
- the analysis unit 23 regards multiple singular points located in close proximity as the same point. For example, the analysis unit 23 regards singular points P(m1), P(m2) ... P(mKm) that satisfy the conditions
- ⁇ THdis and km 2 or more and Km or less as the same point.
- THdis is, for example, 10 m. Note that, if the positioning accuracy of the positioning device 51 is high, THdis may be shorter, for example, 5 m.
- P(mKm) may be divided into sublinks of 10 m units, and if P(m1), P(m2) ... P(mKm) exist in the same sublink, P(m1), P(m2) ... P(mKm) may be determined to be the same point.
- step S303 the analysis unit 23 determines whether or not there is a general singular point Q(m). If there is no general singular point Q(m) in step S303, the processing of the analysis unit 23 returns to step S301, and if there is a general singular point Q(m), the processing of the analysis unit 23 proceeds to step S304.
- FIG. 6 shows a map depicting the singular point P(n) and the general singular point Q(m).
- the singular points P(3), P(5), P(7), P(10), and P(11) are determined to be the same point and correspond to the general singular point Q(1).
- the singular points P(4), P(6), P(8), and P(9) are determined to be the same point and correspond to the general singular point Q(2).
- the position of the general singular point Q is determined using the positions of multiple singular points P that correspond to the general singular point Q.
- the position of the general singular point Q may be the average value of the positions of the corresponding multiple singular points P.
- the position of the singular point P with the smallest ID among the corresponding multiple singular points P is the position of the general singular point.
- the position of the singular point P (3) is the position of the general singular point Q (1)
- the position of the singular point P (4) is the position of the general singular point Q (2).
- step S304 the analysis unit 23 sets the counter m of the general singular point Q(m) for which environmental cause classification is performed to 1.
- step S305 the analysis unit 23 performs an environmental cause classification of the general singular point Q(m) based on the singular event and operating mode of the singular point P(mk) corresponding to the general singular point Q(m).
- Figure 7 shows examples of criteria for environmental cause classification.
- a pattern in which unusual event A (lane departure occurs and LKAS does not operate) occurs in the first driving mode (fully manual driving) is pattern A1.
- a pattern in which unusual event A occurs in the second driving mode is pattern A2, and a pattern in which unusual event A occurs in the third driving mode is pattern A3.
- a pattern in which unusual event B (LKAS operates (semi-activated) but lane departure occurs) occurs in the second driving mode is pattern B2.
- a pattern in which unusual event B occurs in the third driving mode is pattern B3.
- a pattern in which unusual event C (LKAS operates to avoid lane departure) occurs in the second driving mode is pattern C2.
- the general singular point Q(m) if lane departure occurs in the first driving mode (fully manual driving) and the LKAS operates normally in the second driving mode, i.e., if pattern A1 and pattern C2 occur, the general singular point Q(m) is classified as environmental cause classification R1: a point where driving attention is reduced.
- the analysis unit 23 determines that the LKAS was unable to keep up with the driver's steering and caused the lane departure, and classifies the general singular point Q(m) as environmental cause classification R2: "road shape caution point" where lane departure is likely to occur.
- the LKAS being semi-activated refers to a case where the LKAS was activated but did not function, i.e., the vehicle was unable to stay in the lane.
- the analysis unit 23 classifies the general singular point Q(m) as environmental cause classification R3: "LKAS non-operating point, possible road surface deterioration.”
- the general singular point Q(m) classified as environmental cause classification R3 is a point where lane departure occurred despite the third driving mode being less likely to occur than the second driving mode because the steering wheel is operated by the vehicle, so a decrease in road surface ⁇ due to poor white lines or road surface deterioration is expected.
- the general singular point Q(m) is classified as environmental cause classification R4: "LKAS non-operating point.”
- environmental cause classification R4 there is a high possibility of a white line defect.
- the analysis unit 23 determines the cause CAUSE of the occurrence of the singular event at general singular point Q(2) to be environmental cause event R according to the table in FIG. 7, and further analyzes the classification CLASS of environmental cause event R to be environmental cause classification R1 (point of reduced driving attention).
- the analysis unit 23 determines the cause CAUSE of the occurrence of the singular event at general singular point Q(1) to be environmental cause event R according to the table in FIG. 7, and further determines the classification CLASS of environmental cause event R to be environmental cause classification R3 (LKAS non-operating point, possible road surface deterioration) or environmental cause classification R4 (LKAS non-operating point).
- the analysis unit 23 may adopt the environmental cause classification R3 or R4 that has the greater number of occurrences of the corresponding pattern, or may adopt both. Also, if the number of occurrences of the corresponding patterns is the same, the analysis unit 23 may preferentially adopt the environmental cause classification that requires more attention.
- the order of the environmental cause classifications that require attention is R4, R3, R2, and R1.
- step S306 the analysis unit 23 creates environmental warning information by linking the environmental cause event, the environmental cause classification, and the location information of the general singular point Q(m), and stores the environmental warning information in the environmental cause storage unit 25.
- step S307 the analysis unit 23 increments the counter m of the general singular point Q(m) for which environmental cause classification is performed by 1.
- step S308 the analysis unit 23 determines whether the counter m of the general singular points Q(m) for which environmental cause classification is to be performed is equal to or less than the number MD of general singular points Q. If m ⁇ MD, there are general singular points Q(m) for which environmental cause classification has not yet been performed, so the processing of the analysis unit 23 returns to step S305. If m>MD, environmental cause classification has been completed for all general singular points Q(m), so the processing of the analysis unit 23 returns to step S301.
- FIG. 8 shows the environmental caution information stored in the environmental cause storage unit 25.
- the ID of the general peculiar point QID(m), the position of the general peculiar point Q(m), the environmental cause event CAUSE(m), and the environmental cause classification CLASS(m) are linked together.
- the information collection and analysis system 1001 includes the probe information generating device 101 and the information collection and analysis device 201.
- the information collection and analysis device 201 includes an information collecting unit 21 that collects probe information linked to information on a peculiar event including lane departure or LKAS operation from a vehicle 100 capable of automatic driving control by an automatic driving control device 53 when the peculiar event information and information on a driving mode indicating the degree of automatic driving control at the time of the occurrence of the peculiar event are linked to each other, based on the driving mode, and an analysis unit 23 that identifies the cause of the peculiar event as a cause classification based on the driving mode, and creates attention-required information linking the peculiar event with the cause classification.
- the driving modes include a first driving mode in which the driver operates the steering wheel of the vehicle 100 and the automatic driving control device 53 does not perform any steering operation, a second driving mode in which the driver normally operates the steering wheel and the automatic driving control device 53 intervenes in the steering wheel operation and executes the LKAS if it detects a risk of lane departure, and a third driving mode in which the automatic driving control device 53 always controls the steering wheel operation of the vehicle 100.
- the information collection and analysis device 201 can identify the cause of the occurrence of a peculiar event as a detailed cause classification according to the operating mode.
- the probe information may include information on the vehicle type or vehicle class of the vehicle 100 as additional information shown in Fig. 4.
- the analysis unit 23 of the information collection and analysis device 201 that has collected the probe information can perform environmental cause classification by vehicle type or vehicle class. That is, the analysis unit 23 performs environmental cause classification judgment according to the table in Fig. 7 using probe information collected from vehicles 100 of the same model, vehicle type, or vehicle class.
- the vehicle type is a classification of the vehicle 100 according to the body type, such as a sedan or a minivan.
- the vehicle class is a rating of the vehicle 100 according to the body size or engine displacement, for example.
- the road is represented by two roads, one going up and one going down.
- the environmental cause classification is classified separately for the up and down roads.
- the probe information may include information on the lane in which the vehicle 100 is traveling as additional information shown in FIG. 4.
- the positioning device 51 or the surrounding detection device 52 has a high-precision map database having road shape data for each lane, and a high-precision positioning device (High Definition Locator: HDL) having sub-meter-level positioning accuracy or a function to detect the lane in which the vehicle 100 is traveling by image processing.
- the information collection and analysis device 201 that has collected the probe information can perform environmental cause classification for each lane in the analysis unit 23.
- the analysis unit 23 uses the probe information collected from the same lane to determine the environmental cause classification according to the table in FIG. 7.
- the probe information generating device 101 may create probe information for all unusual events that occur in the vehicle 100 and transmit all of the probe information to the information collecting and analyzing device 201.
- the probe information generating device 101 may not transmit probe information that meets a predetermined exclusion condition to the information collecting and analyzing device 201.
- the predetermined exclusion condition may be, for example, when the vehicle 100 changes lanes, or when the vehicle 100 deviates from its lane or approaches a lane boundary line to avoid approaching another vehicle. Whether or not these exclusion conditions are met is determined based on information about surrounding vehicles or surrounding photograph information detected by the surrounding detection device 52, or driving information about the vehicle 100, such as steering, blinkers, and braking, obtained from an in-vehicle LAN or the like.
- the information collection and analysis device 201 that collected the probe information can determine whether or not the probe information meets the exclusion conditions, and discard the probe information that meets the exclusion conditions.
- the analysis unit 23 may repeatedly classify the environmental causes of the general peculiar place information at regular intervals, such as once a month or once a year, and store the environmental caution information of the general peculiar place information in the environmental cause storage unit 25 as time-series information. The analysis unit 23 may then further subdivide the environmental cause classification of the general peculiar place information based on changes over time in the environmental cause classification of the general peculiar place information. The analysis unit 23 may also delete old environmental caution information from the environmental cause storage unit 25.
- the analysis unit 23 creates environmental caution information for general peculiar point information on a monthly cycle, and if a location that was previously a general peculiar point is no longer detected as a peculiar point multiple times, for example three times in a row, it may determine that the environmental cause has been improved and delete the environmental caution information for that general peculiar point from the environmental cause storage unit 25.
- the analysis unit 23 may determine that the environment is gradually deteriorating and add a sub-environmental cause classification such as "environmental deterioration in progress" to the environmental cause classification of the general singular point.
- the analysis unit 23 may add a sub-environmental cause classification such as "Caution for environmental deterioration” or "Sudden environmental deterioration” to the environmental cause classification of the general peculiar point. Then, the information collection and analysis device 201 may report to the road administrator that general peculiar points whose proportion of points probed as peculiar points exceeds a predetermined threshold are poor driving environments.
- the analysis unit 23 may classify the same singular point as a point where road conditions are deteriorating and LKAS operation is unstable.
- the vehicle 100 may be equipped with a DMS (Driver Monitoring System) that detects the driver's state, such as the driver's inattentive state, drowsy state, or absent-minded state.
- the probe information generating unit 14 may include the driver's state as additional information in the probe information. That is, the probe information may include the driver's state that indicates the driver's driving aptitude state related to the driver's inattentiveness or reduced alertness.
- the analysis unit 23 may add a sub-environmental cause classification that takes into account the driver's state to the environmental cause classification of the general singular point.
- the analysis unit 23 may add sub-environmental cause classifications such as "points where dozing occurs frequently,” “points where inattentiveness occurs frequently,” and “points where absent-mindedness occurs frequently” to the environmental cause classification R1 "points where driving attention is reduced” according to the driver's state.
- the analysis unit 23 may add a sub-environmental cause classification of "particular caution when driving" to the environmental cause classification of the general singular point.
- the general singular point is treated as a point where lane departure may occur even if the driver drives carefully.
- FIG. 9 is a block diagram showing a configuration of an information collection and analysis system 1002 according to embodiment 2.
- Information collection and analysis system 1002 differs from information collection and analysis system 1001 according to embodiment 1 in that information collection and analysis system 1002 includes information collection and analysis device 202 instead of information collection and analysis device 201.
- Information collection and analysis device 202 differs from information collection and analysis device 201 in that information collection and analysis device 202 includes individual cause storage unit 26 instead of environmental cause storage unit 25.
- the information collection and analysis device 201 analyzed the environmental causes of a singular event that occurred at a general singular point.
- the information collection and analysis device 202 according to the present embodiment analyzes individual causes that are specific to the vehicle 100 or the driver for a singular event that occurred at a singular point that is not a general singular point.
- Operation> 10 is a flowchart showing the individual cause analysis process performed by the information collection and analysis device 202. The individual cause analysis process will be described below with reference to the flow of FIG.
- steps S401 and S402 are similar to steps S301 and S302 in FIG. 5, so their explanation will be omitted.
- step S403 the analysis unit 23 sets the counter v of the vehicle ID for which the individual cause is to be analyzed to 1.
- the vehicle ID is included in the probe information as shown in FIG. 4, and the analysis unit 23 classifies the individual causes of the individual causal event by vehicle ID.
- the timing of the individual cause analysis process may be the same as or different from the timing of the environmental cause analysis process described in embodiment 1.
- An individual singular point is a singular point whose distance from a general singular point Q(m) is equal to or greater than a predetermined threshold.
- the analysis unit 23 extracts probe information Prove of DN(v) individual singular points whose distance from the general singular point Q(m)
- the predetermined rule for individual singular points is, for example, that the number of individual singular points DN(v) is equal to or greater than a predetermined threshold, for example, 3 or greater.
- a unique event that occurs at an individual unique point is called an individual cause event. Because an individual cause event occurs at a point where it does not generally occur in other vehicles 100, it is considered to be due to a cause specific to the vehicle 100 or the driver in which the individual cause event occurred.
- step S405 the analysis unit 23 classifies the cause of the individual causal event based on the individual causal event and the operating mode at the time the individual causal event occurred.
- the cause of the individual causal event classified here is referred to as an individual cause classification.
- the analysis unit 23 determines the individual cause classification of the individual causal event.
- FIG. 11 shows an example of criteria for individual cause classification.
- the notation of pattern A1 and the like is the same as in FIG. 7.
- step S407 the analysis unit 23 increments the counter v of the vehicle ID for which individual cause classification is to be performed by 1. Then, in step S408, the analysis unit 23 determines whether the counter v of the vehicle ID is equal to or less than VD. If the counter v of the vehicle ID is equal to or less than VD in step S408, the analysis unit 23 determines that there is a vehicle 100 for which the individual cause classification has not been determined, and returns to the processing of step S404. If the counter v of the vehicle ID is greater than VD in step S408, the analysis unit 23 determines that the individual cause classification has been determined for all vehicles 100, and returns to the processing of step S401.
- the analysis unit 23 determined the individual cause classification for each vehicle ID.
- the vehicle ID here is an example of an individual ID that identifies the vehicle 100 or the driver of the vehicle 100.
- the analysis unit 23 may determine the individual cause classification based on a personal ID that identifies the driver instead of the vehicle ID, or may determine the individual cause classification based on both the vehicle ID and the personal ID. This makes it possible to accurately determine the individual cause classification even when multiple drivers drive the same vehicle 100 or when the same driver drives multiple vehicles 100.
- the probe information includes location information of the specific point where the specific event occurred and an individual ID specific to the vehicle or the driver of the vehicle
- the analysis unit determines whether the specific event is an individual cause event caused by an individual cause specific to the vehicle or the driver based on the location information of the specific point and the individual ID, identifies the individual cause that caused the individual cause event as an individual cause classification based on the driving mode, and creates attention-required information that links the individual cause event, the individual cause classification, and the individual ID.
- the cause of the occurrence of the individual cause event can be accurately classified based on the driving mode.
- the analysis unit 23 when a singular event occurs for multiple individual IDs at the same singular point, the analysis unit 23 defines the same singular point as a general singular point, and when the ratio of the singular points at which a singular event occurs for a specific individual ID that differ from general singular points is equal to or exceeds a predetermined threshold, the analysis unit 23 determines that the singular event that occurred for a specific individual ID is an individual cause event. This allows the information collection and analysis device 202 to accurately classify, for a vehicle 100 where a singular event occurs at a point different from that of a general vehicle, the individual causes of the singular event that occurs in the vehicle 100 that are attributable to the vehicle 100 or the driver based on the driving mode.
- the timing of the individual cause classification process shown in Fig. 10 may be different from the timing of the environmental cause analysis process described in embodiment 1.
- the analysis unit 23 may perform individual cause classification process on the probe information. In this case, since there is a high possibility that an individual cause event specific to the vehicle 100 or the driver has occurred at the singular point other than the predefined general singular point Q(m), the analysis is performed in a timely manner.
- the analyzing unit 23 may perform individual cause classification processing on the probe information. In this case, it becomes possible to detect aggressive driving or driver abnormalities of the vehicle 100 at an early stage.
- the information collection and analysis device 202 may also perform individual cause classification processing in response to a request from a third party not shown in FIG. 9, for example, the manager of the vehicle 100.
- the request may include the vehicle ID for which individual cause classification is to be performed, and the information collection and analysis device 201 may perform individual cause classification processing for the vehicle with that vehicle ID.
- the probe information may also include additional information such as vehicle type, vehicle class, mileage, driving time, or use.
- the information collection and analysis device 202 that collects the probe information may perform individual cause classification processing at a timing according to this additional information.
- the analysis unit 23 may shorten the cycle of the individual cause classification processing for buses, trucks, or taxis, which are always on the road, and may lengthen the cycle of the individual cause classification processing for vehicles that are not used for commuting or business.
- the analysis unit 23 may also shorten the cycle of the individual cause classification processing for vehicles 100 with long mileage or driving times.
- the analysis unit 23 may repeatedly perform individual cause classification on a driving unit, a monthly unit, or a yearly unit, and store the attention-requiring information regarding the vehicle's individual cause classification as time-series information in the individual cause storage unit 26. The analysis unit 23 may then further subdivide the individual cause classification based on changes in the individual cause classification over time. The analysis unit 23 may also delete old attention-requiring information from the individual cause storage unit 26.
- the analysis unit 23 may add a sub-individual cause classification such as "significant decline in driving skills” to the individual cause classification U1: “poor driving skills” of that vehicle 100. This can be used as a basis for determining skill decline due to aging.
- the analysis unit 23 may classify the individual cause of the individual causal event that occurred for the specific individual ID as a decline in the driver's driving skills.
- the analysis unit 23 may add a sub-individual cause classification such as "emotional instability" to the individual cause classification U2: "reckless driving” of that vehicle 100.
- the analysis unit 23 may add a sub-individual cause classification such as "related to tailgating" to the individual cause classification of that vehicle 100.
- a sub-individual cause classification such as "related to tailgating”
- the vehicle 100 has previously been determined to be in individual cause classification U2: "aggressive driving”
- the vehicle 100 has not previously been determined to be in individual cause classification U2: "aggressive driving”
- the analysis unit 23 may delete from the individual cause storage unit 26 the attention-requiring information corresponding to the vehicle ID of the vehicle 100, the attention-requiring information related to cause classifications specific to the driver, such as individual cause classifications U1 and U2.
- the analysis unit 23 may transfer the caution information corresponding to the driver's personal ID as caution information corresponding to the vehicle ID of the new vehicle.
- the vehicle 100 may be equipped with a DMS that detects the driver's state, which indicates whether the driver is looking away, dozing, or daydreaming.
- the probe information generation unit 14 may then include the driver's state in the probe information as additional information.
- the analysis unit 23 may add a sub-individual cause classification that takes into account the driver's state to the individual cause classification of the vehicle. For example, the analysis unit 23 may add a sub-individual cause classification such as "frequent looking away" to the individual cause classification U1 "poor driving skills" depending on the driver's state.
- Configuration> 12 is a block diagram showing a configuration of an information collection and analysis system 1003 according to embodiment 3.
- Information collection and analysis system 1003 differs from information collection and analysis system 1003 according to embodiment 1 in that information collection and analysis system 1003 includes information collection and analysis device 203 instead of information collection and analysis device 201.
- Information collection and analysis device 203 differs from information collection and analysis device 201 in that cause storage unit 24 includes environmental cause storage unit 25 and individual cause storage unit 26.
- the information collection and analysis device 201 analyzed the environmental causes of a unique event that occurred at a general unique point (environmental cause analysis processing).
- the information collection and analysis device 202 according to the second embodiment analyzed individual causes that are causes specific to the vehicle 100 or the driver for a unique event that occurred at a unique point that is not a general unique point (individual cause analysis processing).
- the information collection and analysis device 203 determines whether the unique event is a driving environment cause event caused by the driving environment, or an individual cause event caused by a cause specific to the vehicle 100 or the driver, and performs environmental cause analysis processing for the driving environment cause event and individual cause analysis processing for the individual cause event.
- step S306 The environmental cause analysis process in the information collection and analysis device 203 is as described in FIG. 5 in the first embodiment.
- the caution information including the environmental cause classification is stored in the environmental cause storage unit 25.
- the individual cause analysis process in the information collection and analysis device 203 is generally similar to that described in FIG. 10 in the second embodiment. However, the individual cause analysis process in the information collection and analysis device 203 is performed on the assumption that the environmental cause analysis process has already been completed, that is, that the general anomalous point information has already been obtained. That is, in step S401 in FIG. 10, when the analysis unit 23 determines that it is time to analyze, it skips the process of step S402 and executes the processes from step S403 onwards. In step S406, the attention-requiring information including the individual cause classification is stored in the individual cause storage unit 26.
- the information collection and analysis device 203 if the points where the singular event occurred in a certain vehicle 100 include many points different from the general singular points, it is determined that the cause of the singular event is the vehicle 100 or the driver, and the cause is identified as an individual cause classification based on the driving mode of the vehicle 100 at the time of the singular event. In this way, according to the information collection and analysis device 203, in addition to the effects of the first and second embodiments, it is possible to determine whether the singular event that occurred in the vehicle 100 is an environmental cause event caused by the driving environment or an individual cause event caused by the vehicle 100 or the driver.
- Configuration> 13 is a block diagram showing a configuration of an information collection analysis system 1004 according to embodiment 4.
- the information collection analysis system 1004 includes a probe information generation device 104 instead of the probe information generation device 101, an information collection analysis device 204 instead of the information collection analysis device 203, and a presentation device 54 in the vehicle 100.
- the information collection and analysis device 204 includes a distribution unit 27 that distributes the attention-requiring information to the wide area communication network 301.
- the distribution unit 27 retrieves the attention-requiring information stored in the cause storage unit 24 as necessary and distributes it outside the information collection and analysis device 204.
- the distribution destination is, for example, the vehicle 100.
- the information collection and analysis system 1004 shown in FIG. 13 is configured to distribute both caution information including environmental cause classifications and caution information including individual cause classifications, and is the information collection and analysis system 1003 according to embodiment 3 to which a configuration related to distribution has been added.
- the information collection and analysis system 1004 may also be the information collection and analysis system 1001 according to embodiment 1 or the information collection and analysis system 1002 according to embodiment 2 to which a configuration related to distribution has been added.
- the probe information generating device 104 includes an information presenting unit 17 in addition to the components of the probe information generating device 101.
- the information presenting unit 17 causes the presentation device 54 mounted on the vehicle 100 to present the attention-requiring information received by the vehicle communication unit 16 from the information collection and analysis device 204 via the wide area communication network 301.
- the presentation is made in the form of at least one of a display or a sound.
- the presentation device 54 is, for example, a display device mounted on the vehicle 100.
- the information presentation unit 17 controls the display of the cautionary information on the presentation device 54.
- the distribution unit 27 distributes the caution information including the environmental cause classification of the general singular point at a predetermined timing, for example, when receiving a request from an outside source or when performing an environmental cause analysis.
- FIG. 14 shows an example in which caution information including the environmental cause classification of the general singular point distributed from the distribution unit 27 to the vehicle 100 is displayed on the presentation device 54.
- the current position of the vehicle 100 and a driving route 61 are displayed, and general singular points Q(1) and Q(2) are displayed on the driving route 61.
- the general singular point Q(1) is displayed with an environmental cause classification of "LKAS non-operating point”
- the general singular point Q(2) is displayed with an environmental cause classification of "point of reduced driving attention”.
- the location display of the general singular points Q(1) and Q(2) as shown in FIG. 14 may be performed when the vehicle 100 approaches within a certain distance, such as within 500 m, from the general singular point. Also, when the vehicle 100 approaches within a certain distance from a general singular point of environmental cause classification R4: "LKAS non-operating point" while traveling at the second driving level, a warning regarding the general singular point may be issued by the presentation device 54.
- FIG. 14 shows an example in which attention-required information including an environmental cause classification is delivered to the vehicle 100, but attention-required information including an environmental cause classification may also be delivered to the road administrator. This has the effect of providing the road administrator with an opportunity to encourage road repairs.
- the distribution unit 27 distributes the attention-required information including the individual cause classification at a predetermined timing, for example, when an external request is received or when an individual cause analysis is performed.
- the attention-required information including the individual cause classification is distributed to, for example, the vehicle 100 whose individual cause classification has been determined, the manager of the vehicle 100, a driving enforcement agency, or a driver's license issuing agency.
- the driver can recognize his/her own poor driving skills, his/her own reckless driving, or abnormalities in the tires or LKAS function of the vehicle 100. Furthermore, the vehicle manager or road enforcement agency to which the caution information including the individual cause classification is delivered can provide the relevant driver with an opportunity to implement the prescribed procedures or processes for safe driving or safe traveling. Furthermore, the driver's license issuing agency to which the caution information including the individual cause classification is delivered can provide advice to the license renewer, such as returning the license.
- the information collection and analysis device 204 includes a distribution unit 27 that distributes the attention-required information to the outside of the information collection and analysis device 204. Therefore, the attention-required information created by the information collection and analysis device 204 can be used for driving assistance of the vehicle 100 or road repairs, etc.
- the position information acquisition unit 11, the lane departure detection unit 12, the control information acquisition unit 13, the probe information generation unit 14, the probe information transmission unit 15, the vehicle communication unit 16, and the information presentation unit 17 in the above-mentioned probe information generation devices 101, 104 are realized by a processing circuit 81 shown in Fig. 15. That is, the processing circuit 81 includes the position information acquisition unit 11, the lane departure detection unit 12, the control information acquisition unit 13, the probe information generation unit 14, the probe information transmission unit 15, the vehicle communication unit 16, and the information presentation unit 17 (hereinafter referred to as "position information acquisition unit 11, etc.") in the probe information generation devices 101, 104.
- the information collection unit 21, collected information storage unit 22, analysis unit 23, cause storage unit 24, and distribution unit 27 in the information collection and analysis devices 201-204 are realized by a processing circuit 81 separate from the processing circuit 81 that realizes the probe information generation devices 101, 104.
- this separate processing circuit 81 includes the information collection unit 21, collected information storage unit 22, analysis unit 23, cause storage unit 24, and distribution unit 27 (hereinafter, "information collection unit 21", etc.) in the information collection and analysis devices 201-204.
- Each of these processing circuits 81 may be implemented with dedicated hardware, or may be implemented with a processor that executes a program stored in memory.
- processors include a central processing unit, a processing unit, an arithmetic unit, a microprocessor, a microcomputer, a DSP (Digital Signal Processor), etc.
- the processing circuit 81 corresponds to, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field-Programmable Gate Array), or a combination of these.
- ASIC Application Specific Integrated Circuit
- FPGA Field-Programmable Gate Array
- the processing circuit 81 When the processing circuit 81 is a processor, the functions of the location information acquisition unit 11, etc. or the information collection unit 21, etc. are realized by a combination of software, etc. (software, firmware, or software and firmware).
- the software, etc. is written as a program and stored in memory.
- the processor 82 applied to the processing circuit 81 realizes the functions of each unit by reading and executing a program stored in the memory 83. That is, the probe information generation devices 101, 104 are provided with a memory 83 for storing a program that, when executed by the processing circuit 81, results in the function of the location information acquisition unit 11, etc. being executed.
- the information collection and analysis devices 201-204 are also provided with a memory 83 for storing a program that, when executed by the processing circuit 81, results in the function of the information collection unit 21, etc. being executed.
- this program can be said to cause a computer to execute a procedure or method of the location information acquisition unit 11, etc. or the information collection unit 21, etc.
- memory 83 may be, for example, non-volatile or volatile semiconductor memory such as RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disk) and its drive device, or any storage medium to be used in the future.
- RAM Random Access Memory
- ROM Read Only Memory
- flash memory EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disk) and its drive device, or any storage medium to be used in the future.
- EPROM Erasable Programmable Read Only Memory
- EEPROM Electrically Erasable Programmable Read Only Memory
- HDD Hard Disk Drive
- magnetic disk
- the above describes a configuration in which the functions of the location information acquisition unit 11 etc. or the information collection unit 21 etc. are realized either by hardware or software etc. However, this is not limited to this, and a configuration in which part of the location information acquisition unit 11 etc. or the information collection unit 21 etc. is realized by dedicated hardware and another part is realized by software etc.
- the processing circuit can realize each of the above-mentioned functions by hardware, software, etc., or a combination of these.
- the collected information storage unit 22 and the cause storage unit 24 are composed of memory 83, but they may be composed of a single memory 83, or each may be composed of an individual memory.
- Probe information generation unit 15 Probe information transmission unit, 16 Vehicle communication unit, 17 Information presentation unit, 21 Information collection unit, 22 Collected information storage unit, 23 Analysis unit, 24 Cause storage unit, 25 Environmental cause storage unit, 26 Individual cause storage unit, 27 Distribution unit, 51 Positioning device, 52 Surrounding detection device, 53 Automatic driving control device, 54 Presentation device, 61 Driving route, 81 Processing circuit, 82 Processor, 83 Memory, 100 Vehicle, 101, 104 Probe information generation device, 201-204 Information collection and analysis device, 301 Wide area communication network, 1001-1004 Information collection and analysis system.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025554388A JP7814636B2 (ja) | 2023-10-31 | 2023-10-31 | 情報収集分析装置および情報収集分析システム |
| PCT/JP2023/039271 WO2025094269A1 (ja) | 2023-10-31 | 2023-10-31 | 情報収集分析装置および情報収集分析システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/039271 WO2025094269A1 (ja) | 2023-10-31 | 2023-10-31 | 情報収集分析装置および情報収集分析システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025094269A1 true WO2025094269A1 (ja) | 2025-05-08 |
Family
ID=95581676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/039271 Pending WO2025094269A1 (ja) | 2023-10-31 | 2023-10-31 | 情報収集分析装置および情報収集分析システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7814636B2 (https=) |
| WO (1) | WO2025094269A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015209140A (ja) * | 2014-04-28 | 2015-11-24 | 本田技研工業株式会社 | 走行支援装置及び車両 |
| JP2018180843A (ja) * | 2017-04-11 | 2018-11-15 | 株式会社デンソー | 車両のデータ記憶装置 |
| JP2019139291A (ja) * | 2018-02-06 | 2019-08-22 | 株式会社デンソーテン | 情報記録装置および情報記録方法 |
| WO2022144952A1 (ja) * | 2020-12-28 | 2022-07-07 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2022163745A (ja) * | 2021-04-15 | 2022-10-27 | 三菱電機株式会社 | 情報記録送信装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004126888A (ja) * | 2002-10-01 | 2004-04-22 | Nissan Motor Co Ltd | 車両用情報提示装置 |
-
2023
- 2023-10-31 JP JP2025554388A patent/JP7814636B2/ja active Active
- 2023-10-31 WO PCT/JP2023/039271 patent/WO2025094269A1/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015209140A (ja) * | 2014-04-28 | 2015-11-24 | 本田技研工業株式会社 | 走行支援装置及び車両 |
| JP2018180843A (ja) * | 2017-04-11 | 2018-11-15 | 株式会社デンソー | 車両のデータ記憶装置 |
| JP2019139291A (ja) * | 2018-02-06 | 2019-08-22 | 株式会社デンソーテン | 情報記録装置および情報記録方法 |
| WO2022144952A1 (ja) * | 2020-12-28 | 2022-07-07 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2022163745A (ja) * | 2021-04-15 | 2022-10-27 | 三菱電機株式会社 | 情報記録送信装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7814636B2 (ja) | 2026-02-16 |
| JPWO2025094269A1 (https=) | 2025-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11893835B2 (en) | In-vehicle monitoring and reporting apparatus for vehicles | |
| US10578442B2 (en) | Data mining to identify locations of potentially hazardous conditions for vehicle operation and use thereof | |
| US11685386B2 (en) | System and method for determining a change of a customary vehicle driver | |
| US10755566B2 (en) | Method and apparatus for determining location-based vehicle behavior | |
| US10460394B2 (en) | Autonomous or partially autonomous motor vehicles with automated risk-controlled systems and corresponding method thereof | |
| CN110428604B (zh) | 一种基于轨迹和地图数据的出租车违停监测与预警方法 | |
| WO2014207558A2 (en) | Onboard vehicle accident detection and damage estimation system and method of use | |
| US20080269985A1 (en) | Travel information collection apparatus | |
| CN111465972B (zh) | 用于计算交通工具传感器数据的错误概率的系统 | |
| US20210024058A1 (en) | Evaluating the safety performance of vehicles | |
| US12345538B2 (en) | System and method for monitoring a vehicle | |
| US20250085135A1 (en) | Method and system for measuring extrinsic crash risk | |
| LeBlanc et al. | Road departure crash warning system field operational test: methodology and results. volume 1: technical report | |
| US11807252B2 (en) | Method and apparatus for determining vehicle behavior | |
| JP7814636B2 (ja) | 情報収集分析装置および情報収集分析システム | |
| Beale et al. | Summarizing normative driving behavior from large-scale NDS datasets for vehicle system development | |
| LeBlanc et al. | Field study of the level 2 Super Cruise using telematics data | |
| JP2003160036A (ja) | 車両情報システムの情報表示方法 | |
| JP7814632B2 (ja) | 動作評価装置、動作評価方法、および、プログラム | |
| CN118397831B (zh) | 一种基于行为特征捕捉的高速公路交通状态预测方法 | |
| Green | Human factors and ergonomics in motor vehicle transportation | |
| EP4539010A1 (en) | Systems and methods for predicting collision probabilities associated with roadway intersections | |
| US20250173795A1 (en) | Method to measure insurability based on relative operator performance | |
| JP2026013040A (ja) | センタ装置、信号無視検知システムおよび信号無視検知方法 | |
| CN120833081A (zh) | 用于确定驾驶员得分的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23957598 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025554388 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025554388 Country of ref document: JP |