WO2024236947A1 - 航行支援装置、航行支援方法、及びプログラム - Google Patents
航行支援装置、航行支援方法、及びプログラム Download PDFInfo
- Publication number
- WO2024236947A1 WO2024236947A1 PCT/JP2024/014456 JP2024014456W WO2024236947A1 WO 2024236947 A1 WO2024236947 A1 WO 2024236947A1 JP 2024014456 W JP2024014456 W JP 2024014456W WO 2024236947 A1 WO2024236947 A1 WO 2024236947A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- ship
- route
- vessel
- intrusion
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






















































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G3/00—Traffic control systems for marine craft
- G08G3/02—Anti-collision systems
Definitions
- the present invention relates to a navigation support device, a navigation support method, and a program.
- Patent Document 1 discloses a collision avoidance route search device that searches for a route when a predicted collision avoidance area is on a straight line connecting the destination and the ship itself.
- the above conventional technology only determines whether or not there is a predicted avoidance area on the straight line connecting the destination and the ship, but it would be useful to be able to evaluate not only whether or not there is a collision between the ship and another ship, but also the degree of approach.
- the present invention was made in consideration of the above problems, and its main objective is to provide a navigation support device, a navigation support method, and a program that are capable of evaluating the degree of approach.
- a navigation support device includes a first acquisition unit that acquires first ship data including the position and speed of a first ship, a second acquisition unit that acquires second ship data including the position and speed of a second ship, and an intrusion degree calculation unit that calculates an intrusion degree of the second ship when it is predicted to intrude into a bumper area based on the first ship data, the second ship data, and the risk coefficient, the bumper area having a risk coefficient determined according to a direction based on the first ship, the risk coefficient increasing the closer the second ship is to the first ship in each direction based on the first ship.
- the intrusion degree calculation unit may calculate, as the intrusion degree, the maximum value of the risk coefficient when the intrusion of the second vessel into the bumper area is predicted while the first vessel is sailing. This makes it possible to evaluate the degree of approach.
- the intrusion degree calculation unit may calculate, as the intrusion degree, the integral value of the risk coefficient when the intrusion of the second vessel into the bumper area is predicted while the first vessel is sailing. This makes it possible to evaluate the degree of approach.
- the second acquisition unit may acquire the second ship data of each of the second ships
- the intrusion degree calculation unit may calculate the intrusion degree when the intrusion of the second ships into the bumper area is predicted. This makes it possible to evaluate the degree of approach of the second ships.
- the intrusion degree calculation unit may calculate the intrusion degree as the maximum value or the total integral value of the risk coefficients when the intrusion of each of the second vessels into the bumper area while the first vessel is sailing. This makes it possible to evaluate the degree of approach.
- the intrusion degree calculation unit may calculate, as the intrusion degree, the maximum value of the maximum value or the integral value of the risk coefficient when the intrusion of each of the second vessels into the bumper area while the first vessel is sailing. This makes it possible to evaluate the degree of approach.
- the intrusion degree calculation unit may calculate the maximum value of the total value of the risk coefficients at each point in time when the intrusion of a plurality of the second vessels into the bumper area while the first vessel is sailing as the intrusion degree. This makes it possible to evaluate the degree of approach.
- a route acquisition unit may be further provided for acquiring a planned route of the first vessel, and the intrusion degree calculation unit may calculate the intrusion degree when the first vessel is navigating the planned route. This makes it possible to evaluate the degree of approach during the period when the first vessel is navigating the planned route.
- the route acquisition unit may acquire a plurality of the planned routes
- the intrusion degree calculation unit may calculate the intrusion degree when the first vessel navigates each of the planned routes, and may further include a route selection unit that selects a portion of the planned routes from among the plurality of planned routes based on the calculation result of the intrusion degree. This makes it possible to select a planned route according to the intrusion degree.
- the route selection unit may select, from among the multiple planned routes, a planned route whose intrusion degree is equal to or less than a predetermined value. This makes it possible to select a planned route according to the intrusion degree.
- a display unit may be further provided that displays the multiple planned routes in a display mode according to the degree of intrusion. This makes it possible to display the planned routes according to the degree of intrusion.
- a ship steering control unit may be further provided that controls the ship steering of the first vessel based on the selected planned route. This enables ship steering control to navigate the planned route selected according to the degree of intrusion.
- the intrusion degree calculation unit may correct the intrusion degree to be higher when the second vessel is simultaneously present in both the range of the bumper area toward the bow and port side of the first vessel and the range of the bumper area toward the bow and starboard side of the first vessel. This makes it possible to increase the intrusion degree when avoidance is difficult in either the left or right range.
- the intrusion degree calculation unit may correct the risk coefficient to be higher when the second vessel is simultaneously present in both the range of the bumper area toward the bow and port side of the first vessel and the range of the bumper area toward the bow and starboard side of the first vessel. This makes it possible to increase the risk coefficient when avoidance is difficult in both the left and right ranges.
- the bumper area may have a shape that is wider in the bow direction than in the stern direction of the first vessel. This makes it possible to improve the detection sensitivity in the bow direction.
- the bumper area may have a shape that is wider on the starboard side of the first vessel than on the port side. This makes it possible to improve detection sensitivity in the starboard direction.
- first ship data including the position and speed of a first ship is acquired
- second ship data including the position and speed of a second ship is acquired
- a bumper area has a risk coefficient determined according to a direction based on the first ship, and the risk coefficient increases the closer the second ship is to the first ship in each direction based on the first ship, and the degree of intrusion of the second ship is predicted based on the first ship data, the second ship data, and the risk coefficient.
- a program causes a computer to execute the following steps: acquire first ship data including the position and speed of a first ship; acquire second ship data including the position and speed of a second ship; and calculate, based on the first ship data, the second ship data, and the risk coefficient, a degree of intrusion when the second ship is predicted to intrude into a bumper area having a risk coefficient determined according to a direction based on the first ship, the risk coefficient increasing the closer the second ship is to the first ship in each direction based on the first ship. This makes it possible to evaluate the degree of approach by calculating the degree of intrusion.
- FIG. 1 illustrates an example of a shipboard system.
- 1 is a diagram illustrating an example of a navigation support device according to a first embodiment.
- FIG. 4 is a diagram showing an example of a other ship management database.
- FIG. 4 is a diagram for explaining a bumper region.
- FIG. 4 is a diagram for explaining a bumper region.
- FIG. 11 is a diagram for explaining calculation of an intrusion degree.
- FIG. 11 is a diagram for explaining calculation of an intrusion depth.
- FIG. 11 is a diagram for explaining calculation of an intrusion depth.
- FIG. 11 is a diagram for explaining calculation of an intrusion degree.
- FIG. 13 is a diagram showing an example of a display of a planned route.
- FIG. 2 is a diagram illustrating an example of a navigation support method according to the first embodiment.
- FIG. 11 is a diagram illustrating an example of a navigation support device according to a second embodiment.
- FIG. 13 is a diagram showing an example of identifying a risk section.
- FIG. 13 is a diagram illustrating an example of identifying a blocked area.
- FIG. 13 is a diagram illustrating an example of identifying a blocked area.
- FIG. 13 is a diagram illustrating an example of identifying a blocked area.
- FIG. 11 is a diagram illustrating an example of a navigation support method according to a second embodiment.
- FIG. 13 is a diagram illustrating an example of a navigation support device according to a third embodiment.
- FIG. 13 is a diagram for explaining short-distance avoidance.
- FIG. 13 is a diagram for explaining mid-distance avoidance.
- FIG. 13 is a diagram for explaining short-distance avoidance.
- FIG. 13 is a diagram for explaining a collision index weight.
- FIG. 13 is a diagram for explaining an avoidance index weight.
- FIG. 13 is a diagram for explaining a threshold value.
- FIG. 13 is a diagram for explaining calculation of an avoidance route.
- FIG. 13 is a diagram for explaining calculation of an avoidance route.
- FIG. 13 is a diagram for explaining route output weighting.
- FIG. 13 is a diagram illustrating an example of a navigation support method according to a third embodiment.
- FIG. 13 is a diagram illustrating an example of a navigation support device according to a fourth embodiment.
- FIG. 13 is a diagram for explaining route evaluation.
- FIG. 13 is a diagram for explaining a matchmaking relationship.
- FIG. 13 is a diagram for explaining a matchmaking relationship.
- FIG. 13 is a diagram for explaining a matchmaking relationship.
- FIG. 13 is a diagram for explaining a matchmaking relationship.
- FIG. 13 is a diagram for explaining holding/avoidance determination.
- FIG. 13 is a diagram for explaining holding/avoidance determination.
- FIG. 13 is a diagram for explaining holding/avoidance determination.
- FIG. 13 is a diagram for explaining holding/avoidance determination.
- FIG. 13 is a diagram for explaining route evaluation.
- FIG. 13 is a diagram for explaining route evaluation.
- FIG. 13 is a diagram for explaining route evaluation.
- FIG. 13 is a diagram for explaining route evaluation.
- FIG. 13 is a diagram for explaining route evaluation.
- FIG. 13 is a diagram illustrating an example of a navigation support method according to a fourth embodiment. This is a continuation of Figure 41.
- FIG. 13 is a diagram illustrating an example of a navigation support device according to a fifth embodiment.
- FIG. 13 is a diagram illustrating an example of a navigation support device according to a fifth embodiment.
- FIG. 13 is a diagram illustrating an example of a navigation support method according to the fifth embodiment.
- FIG. 13 is a diagram illustrating an example of a navigation support device according to a sixth embodiment.
- FIG. 13 is a diagram for explaining generation of candidate routes.
- FIG. 13 is a diagram for explaining grouping of candidate routes.
- FIG. 13 is a diagram for explaining grouping of candidate routes.
- FIG. 13 is a diagram for explaining grouping of candidate routes.
- FIG. 13 is a diagram for explaining the determination of a representative route.
- FIG. 13 is a diagram for explaining the display of a representative route.
- FIG. 13 is a diagram for explaining the display of a representative route.
- FIG. 13 is a diagram for explaining the display of a representative route.
- FIG. 13 is a diagram for explaining the display of a representative route.
- FIG. 13 is a diagram for explaining the display of a representative route.
- FIG. 23 is a diagram illustrating an example of a navigation support method according to a sixth
- FIG. 1 is a block diagram showing an example configuration of the shipboard system 100.
- the shipboard system 100 is a system installed on a ship.
- the ship on which the shipboard system 100 is installed is referred to as the "own ship” and other ships are referred to as "other ships.”
- the shipboard system 100 includes a navigation assistance device 1, a display unit 2, a radar 3, an AIS 4, a camera 5, a GNSS receiver 6, a gyrocompass 7, an ECDIS 8, a wireless communication unit 9, and a ship steering control unit 10. These devices are connected to a network N, such as a LAN, and are capable of network communication with each other.
- a network N such as a LAN
- the navigation support device 1 is equipped with a computer including a CPU, RAM, ROM, non-volatile memory, and an input/output interface.
- the CPU of the navigation support device 1 executes information processing according to a program loaded from the ROM or non-volatile memory to the RAM.
- the program may be supplied via an information storage medium such as an optical disk or a memory card, or via a communications network such as the Internet or a LAN.
- an information storage medium such as an optical disk or a memory card
- a communications network such as the Internet or a LAN.
- the display unit 2 displays the display image generated by the navigation support device 1.
- the display unit 2 also displays radar images, camera images, electronic nautical charts, etc.
- the display unit 2 is, for example, a display device with a touch sensor, a so-called touch panel.
- the touch sensor detects the position on the screen pointed to by the user's finger or the like.
- the pointed position may be input by a pointing device such as a trackball.
- the radar 3 emits radio waves around the ship, receives the reflected waves, and generates echo data based on the received signals.
- the radar 3 also identifies targets from the echo data and generates TT data (Target Tracking Data) that represents the target's position and speed.
- the AIS (Automatic Identification System) 4 receives AIS data from other ships around the ship or from land-based control. It is not limited to AIS, and VDES (VHF Data Exchange System) may also be used. AIS data includes the identification codes, names, positions, courses, speeds, types, lengths, and destinations of other ships.
- Camera 5 is a digital camera that captures images of the outside world from the ship and generates image data.
- Camera 5 is installed, for example, on the bridge of the ship, facing the bow direction.
- Camera 5 is, for example, a so-called PTZ camera that has pan/tilt and optical zoom functions.
- the camera 5 may include an image recognition unit that estimates the in-image position and type of a target, such as a ship, contained in a captured image using an object detection model.
- the image recognition unit is not limited to the camera 5, and may be realized in other devices, such as the navigation support device 1.
- the GNSS receiver 6 detects the ship's position based on radio waves received from the Global Navigation Satellite System (GNSS).
- the gyrocompass 7 detects the ship's bow direction.
- a GPS compass may be used instead of a gyrocompass.
- the ECDIS (Electronic Chart Display and Information System) 8 acquires the ship's position from the GNSS receiver 6 and displays the ship's position on an electronic chart.
- the ECDIS 8 also displays the ship's planned route on the electronic chart.
- a GNSS plotter may be used instead of an ECDIS.
- the wireless communication unit 9 includes wireless equipment that realizes satellite communication.
- the wireless communication unit 9 also includes wireless equipment that realizes wireless communication using, for example, ultra-high frequency waves, very high frequency waves, short waves, medium high frequency waves, or medium waves.
- the ship steering control unit 10 is a control device for realizing autonomous navigation, and controls the ship's steering gear.
- the ship steering control unit 10 may also control the ship's engine.
- the navigation support device 1 and the display unit 2 are independent devices, but this is not limited thereto, and the navigation support device 1 and the display unit 2 may be an integrated device.
- navigation support device 1 is an independent device, it is not limited to this and may be integrated with another device such as an ECDIS 8. In other words, some or all of the functions of the navigation support device 1 may be realized by another device.
- the display unit 2 is also an independent device, but is not limited to this.
- a display unit of another device such as an ECDIS 8, may be used as the display unit 2 that displays the display image generated by the navigation support device 1.
- the navigation assistance device 1 is mounted on a ship, but this is not limited thereto.
- it may be installed at a land-based control center and used to assist the navigation of ships under surveillance.
- the navigation support device 1 includes a control unit 20.
- the control unit 20 is a computer including a CPU, a RAM, a ROM, a non-volatile memory, an input/output interface, and the like.
- control unit 20 includes a ship data acquisition unit 11, a second ship data acquisition unit 12, a collision risk calculation unit 13, a route generation unit 14, a route selection unit 15, and an intrusion degree calculation unit 16. These functional units are realized by the CPU of the control unit 20 executing information processing according to a program.
- the own ship data acquisition unit 11 acquires own ship data including the position and speed of the own ship.
- the own ship data acquisition unit 11 is an example of a first acquisition unit
- the own ship is an example of a first ship
- the own ship data is an example of first ship data.
- the speed is a vector quantity represented by the ship speed and the course
- the ship speed is a scalar quantity.
- the ship data acquisition unit 11 sequentially acquires the ship's position detected by the GNSS receiver 6, and calculates the ship's speed from the change in the ship's position over time.
- the ship's speed may be acquired from a ship's speedometer (not shown), and the ship's course may be acquired from the gyrocompass 7.
- the other ship data acquisition unit 12 acquires other ship data including the position and speed of other ships.
- the other ship data acquisition unit 12 is an example of a second acquisition unit and detection unit, the other ship is an example of a second ship, and the other ship data is an example of second ship data.
- the other ship data is generated based on data detected by the radar 3, AIS 4, or camera 5 installed on the ship itself.
- the other ship data acquisition unit 12 sequentially acquires, as other ship data, the TT data generated by the radar 3, the AIS data received by the AIS 4, or the identification data identified from the images captured by the camera 5.
- the other ship data acquisition unit 12 registers the acquired other ship data in a other ship management database constructed in memory.
- the other ship management database includes fields such as "Ship ID,” “Source,” “Position,” “Speed,” and “Course.”
- “Ship ID” is an identifier given to other ships.
- “Source” indicates whether the other ship data was generated by radar 3, AIS 4, or camera 5.
- Position indicates the position of the other ship.
- the position of the other ship is expressed as latitude and longitude.
- the position of the other ship detected by the radar 3 or camera 5 is expressed as a relative position to the ship itself, so it is converted to an absolute position using the ship's own position detected by the GNSS receiver 6.
- Speed indicates the speed of the other ship.
- Corona indicates the course of the other ship. The speed and course of the other ship detected by radar 3 or camera 5 are estimated from the change over time in the position of the other ship in the image.
- the collision risk calculation unit 13 estimates the collision risk between the own ship and other ships based on the own ship data acquired by the own ship data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12.
- the collision risk calculation unit 13 calculates a collision risk area where the risk of collision between the ship and another ship is greater than or equal to a predetermined value.
- the collision risk area is, for example, OZT (Obstacle Zone by Target).
- PAD Predict Area of Danger
- DAC angerous Area of Collision
- the collision risk calculation unit 13 may also calculate collision risk values such as TCPA (Time to Closest Point of Approach) in a CPA collision warning.
- TCPA Time to Closest Point of Approach
- the route generation unit 14 calculates the planned route of the ship. Specifically, the route generation unit 14 calculates multiple planned routes that are candidates for navigation.
- the route generation unit 14 is an example of a route acquisition unit or a route calculation unit.
- the route generation unit 14 calculates an avoidance route to avoid a collision as a planned route based on the ship's own data and other ship data.
- the route generation unit 14 calculates the avoidance route using an avoidance maneuvering algorithm.
- the route generation unit 14 may obtain the planned route from another device such as the ECDIS 8.
- the planned route is a planned route to the destination based on the navigation plan.
- the route selection unit 15 selects a part of the planned routes from among the multiple planned routes calculated by the route generation unit 14. In this embodiment, the route selection unit 15 selects a part of the planned routes from among the multiple planned routes based on the result of the intrusion degree calculation by the intrusion degree calculation unit 16.
- the intrusion degree calculation unit 16 calculates the intrusion degree based on the own ship data acquired by the own ship data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12.
- the intrusion degree is an index that represents the degree to which other ships will in the future intrude into the bumper area that is set based on the own ship.
- Figures 4 and 5 are diagrams for explaining the bumper area BM that is set based on the ship SH.
- arrow F indicates the bow direction
- arrow A indicates the stern direction
- arrow S indicates the starboard direction
- arrow P indicates the port direction.
- Figure 4 shows the planar distribution of risk coefficients in the bumper area BM using contour lines.
- the dashed arrow RD indicates the relative movement direction of the other ship OP.
- Figure 5 (a) shows the distribution of risk coefficients RC on the bow line of own ship SH
- Figure 5 (b) shows the distribution of risk coefficients RC on the horizontal line of own ship SH.
- the bumper area BM has a risk coefficient RC that increases the closer it is to the ship SH in each direction relative to the ship SH.
- the bumper area BM has a risk coefficient RC that is determined according to the direction relative to the ship SH, i.e., it has a shape that is determined according to the direction relative to the ship SH.
- the bumper area BM has a shape that is wider in the bow direction F of the ship SH than in the stern direction A of the ship SH. This makes it possible to increase the sensitivity in the bow direction F, which is the traveling direction of the ship SH.
- the bumper area BM has a shape that is wider in the starboard direction S than in the port direction P of the ship SH. This makes it possible to increase the sensitivity in the starboard direction S, where the ship SH becomes an give-way ship when another ship OP is present.
- the shape or size of the bumper area BM does not need to be constant at all times, and may be adaptively set depending on, for example, the attributes of the sea area in which the ship SH is sailing, the turning performance of the ship SH, or the ship speed of the ship SH.
- the bumper area BM is a rectangle formed by connecting each point on the bow direction F, the stern direction A, the starboard direction S, and the port direction P with straight lines, but it is not limited to this and may be a shape formed by connecting each point with a convex curve in a direction away from the ship SH.
- the risk coefficient RC of the bumper area BM increases linearly as it approaches the own ship SH, but this is not limited to the above, and the risk coefficient RC may increase stepwise, exponentially, or logarithmically.
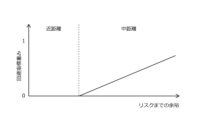
- Figure 6 shows the change in risk coefficient RC over time when the other ship OP in Figure 4 moves relatively in the direction of the dashed arrow RD and enters the bumper area BM.
- the horizontal axis represents time t
- the vertical axis represents the risk coefficient RC.
- the risk coefficient RC gradually increases as time t passes, and after a certain point, it gradually decreases as time t passes.
- the risk coefficient RC increases when the other ship OP approaches the ship SH, and decreases when the other ship OP moves away from the ship SH.
- the intrusion degree calculation unit 16 calculates the intrusion degree of the other ship OP based on the risk coefficient RC when the intrusion of the other ship OP into the bumper area BM is predicted while the ship SH is sailing.
- the intrusion degree calculation unit 16 calculates the risk coefficient RC for each time (see FIG. 6), and calculates the intrusion degree of the other ship OP based on the calculated risk coefficient RC for each time.
- the calculation of the risk coefficient RC for each time is performed under the assumption that the other ship OP will navigate from the detected position while maintaining the detected speed.
- the intrusion degree calculation unit 16 may calculate the maximum value of the risk coefficient RC when the intrusion of the other ship OP into the bumper area BM while the ship SH is sailing as the intrusion degree (i.e., the height of the peak of the risk coefficient RC shown in FIG. 6). This makes it possible to increase the intrusion degree as the other ship OP gets closer to the ship SH.
- the intrusion degree calculation unit 16 may also calculate the integrated value of the risk coefficient RC (i.e., the area of the peak of the risk coefficient RC shown in FIG. 6) when the intrusion of another ship OP into the bumper area BM while the ship SH is sailing as the intrusion degree. This makes it possible to increase the intrusion degree the closer the other ship OP is to the ship SH and the longer it stays in the bumper area BM.
- the integrated value of the risk coefficient RC i.e., the area of the peak of the risk coefficient RC shown in FIG. 6
- the intrusion degree calculation unit 16 calculates the intrusion degree when multiple other ships OP are predicted to invade the bumper area BM while the ship SH is sailing.
- the intrusion degree calculation unit 16 calculates the risk coefficient RC for each of the multiple other ships OP at each time (see FIG. 6), and calculates the intrusion degree based on the calculated risk coefficient RC. Without being limited to this, the intrusion degree calculation unit 16 may calculate the intrusion degree for each of the multiple other ships OP, and calculate an intrusion degree that combines the calculated risk coefficients.
- the intrusion degree calculation unit 16 may calculate the intrusion degree as the maximum value or the total integral value of the risk coefficient RC when the intrusion of each other ship OP into the bumper area BM while the ship SH is sailing. This makes it possible to increase the intrusion degree the more opportunities there are for the other ships OP to approach the ship SH.
- the intrusion degree calculation unit 16 may also calculate the maximum value of the maximum or integral value of the risk coefficient RC when the intrusion of each other ship OP into the bumper area BM while the ship SH is sailing as the intrusion degree. This makes it possible to increase the intrusion degree the closer any other ship OP approaches the ship SH.
- the intrusion degree calculation unit 16 may also calculate the maximum value of the total value of the risk coefficients RC at each point in time when multiple other ships OP are predicted to intrude into the bumper area BM while the ship SH is sailing as the intrusion degree. This makes it possible to increase the intrusion degree as the number of other ships OP that simultaneously intrude into the bumper area BM increases.
- Figures 7 and 8 are diagrams for explaining the calculation of the intrusion degree when multiple other ships OP simultaneously intrude into the bumper area BM.
- another ship OP1 is on the line with a risk coefficient RC of 0.1
- another ship OP2 is on the line with a risk coefficient RC of 0.3, so the total risk coefficient RC is 0.4.
- the total value of the risk coefficients RC is the intrusion degree
- the total value of the risk coefficients RC i.e., the intrusion degree
- the intrusion degree in the example of FIG. 8 is higher than the intrusion degree in the example of FIG. 7.
- FIG. 9 is a diagram for explaining the calculation of the intrusion degree when the ship SH is navigating the planned route SR.
- the intrusion degree calculation unit 16 calculates the intrusion degree during the period when the ship SH is navigating the planned route SR.
- the planned route SR includes multiple legs LG.
- Leg LG is a general term for the first leg LG1 to the third leg LG3, etc.
- the planned route SR includes the first leg LG1 from the current position of the ship SH to the first waypoint WP1, the second leg LG2 from the first waypoint WP1 to the second waypoint WP2, and the third leg LG3 from the second waypoint WP2 to the third waypoint (not shown), etc.
- the intrusion degree calculation unit 16 sets a virtual leg VLG corresponding to each leg LG, places a virtual own ship VS in the virtual leg VLG, and calculates the intrusion degree for each leg LG.
- the virtual leg VLG is a general term for the virtual first leg VLG1 to the virtual second leg VLG2, etc.
- the virtual own ship VS is a general term for the virtual first own ship VS1 to the virtual second own ship VS2.
- the intrusion degree calculation unit 16 sets a virtual first leg VLG1 extending from the first waypoint WP1 in the opposite direction to the second leg LG2, places the virtual first own ship VS1 on the virtual first leg VLG1, and calculates the intrusion degree during the period when the own ship SH navigates the second leg LG2.
- the virtual first leg VLG1 is aligned in a straight line with the second leg LG2 and has the same length d1 as the length d1 of the first leg LG1.
- the virtual first own ship VS1 is located at the opposite end of the virtual first leg VLG1 from the first waypoint WP1 and moves on the virtual first leg VLG1 at the same speed as the own ship SH.
- the intrusion degree calculation unit 16 also sets a virtual second leg VLG2 extending from the second waypoint WP1 in the opposite direction to the third leg LG3, places the virtual ship VS2 on the virtual second leg VLG2, and calculates the intrusion degree during the period when the ship SH is navigating the third leg LG3.
- the virtual second leg VLG2 is aligned in a straight line with the third leg LG3 and has a length d2 equal to the combined length d2 of the first leg LG1 and the second leg LG2.
- the virtual second own ship VS2 is located at the opposite end of the virtual second leg VLG2 from the second waypoint WP2 and moves on the virtual second leg VLG2 at the same speed as the own ship SH.
- the intrusion degree calculation unit 16 calculates the intrusion degree of the entire planned route SR by performing the above calculation for all legs LG included in the planned route SR.
- the intrusion degree calculation unit 16 calculates the intrusion degree when the ship navigates each of the multiple planned routes calculated by the route generation unit 14.
- the route selection unit 15 selects one of the multiple planned routes based on the intrusion degree calculation result and outputs it to the ship steering control unit 10.
- the ship steering control unit 10 performs ship steering control based on the selected planned route.
- the route selection unit 15 selects the planned route with the lowest degree of intrusion from among the multiple planned routes.
- the route selection unit 15 may extract all planned routes with a degree of intrusion equal to or less than a predetermined level from among the multiple planned routes, and may display the extracted multiple planned routes on the display unit 2 to prompt the user to select a planned route.
- the intrusion degree is used for risk assessment of the planned route, but it is not limited to this, and the intrusion degree may be used for collision detection, for example. That is, the intrusion degree may be used as the collision risk value calculated by the collision risk calculation unit 13. When the intrusion degree is used as the collision risk value, weighting may be performed so that the intrusion degree is higher the shorter the distance or time until the other ship intrudes into the bumper area.
- FIG. 10 is a diagram showing an example of an image MG displayed on the display unit 2.
- the image MG displays multiple planned routes CR from the current position of the ship SH to the destination DS. It is preferable that the multiple planned routes CR are displayed in a display mode according to the degree of intrusion.
- each leg included in the planned route may be displayed in a display mode according to the degree of intrusion for each leg.
- FIG. 11 is a diagram showing an example of the procedure of the navigation support method according to the first embodiment, which is implemented in the navigation support device 1.
- the control unit 20 of the navigation support device 1 executes the information processing shown in the diagram according to a program.
- control unit 20 acquires ship data indicating the ship's position and speed from the GNSS receiver 6 or the like (S11, processing as the ship data acquisition unit 11).
- control unit 20 acquires other ship data indicating the position and speed of other ships from the radar 3, AIS 4, or camera 5 (S12, processing as the other ship data acquisition unit 12).
- control unit 20 generates multiple planned routes (S13, processing as the route generation unit 14). For example, when the collision risk becomes equal to or greater than a predetermined level, the control unit 20 calculates multiple avoidance routes as planned routes.
- control unit 20 calculates the risk coefficient for each time for one of the multiple planned routes and one of the multiple other ships (S14, processing as the intrusion degree calculation unit 16). The control unit 20 calculates the risk coefficient for each time for all other ships (S15).
- control unit 20 calculates the intrusion degree of one of the multiple planned routes based on the calculation result of the risk coefficient (S16, processing as the intrusion degree calculation unit 16). The control unit 20 calculates the intrusion degree for all planned routes (S17).
- control unit 20 selects a planned route to be used for ship steering control from among the multiple planned routes based on the calculation result of the penetration degree (S18, processing as the route selection unit 15).
- the selected planned route is output to the ship steering control unit 10.
- [Second embodiment] 12 is a block diagram showing an example of the configuration of the navigation support device 1 according to the second embodiment.
- the control unit 20 includes an own ship data acquisition unit 11, an other ship data acquisition unit 12, a route generation unit 14, a route selection unit 15, a risk section identification unit 23, and a blockage area identification unit 26.
- the risk zone identification unit 23 identifies risk zones where there is a risk of collision between the own ship and other ships based on the own ship data acquired by the own ship data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12.
- the risk zones correspond to collision risk areas such as OZT.
- Figure 13 is a diagram showing an example of identifying risk sections.
- the risk section identification unit 23 identifies risk sections L1 and L2 on the predicted route R of the other ship OP where the risk of collision between the ship SH and the other ship OP is equal to or greater than a threshold, based on the predicted positions of the ship SH and the other ship OP at each point in time when the ship SH is assumed to change course in an arbitrary direction and cross the predicted route R of the other ship OP.
- the calculation of the ship SH's predicted position is performed under the assumption that the ship SH will maintain its speed and change course in any direction from its current position.
- the magnitude of the ship SH's speed vector is constant, while the direction of the ship SH's speed vector is assumed to change course in any direction at a reference time, and thereafter the ship SH is assumed to continue sailing in a constant direction from its own position at the reference time. Therefore, the predicted position of the ship SH at each time point exists on a concentric circle centered on the ship's position at the reference time. The radius of the circle is expressed as the product of the time elapsed from the reference time point and the magnitude of the ship SH's speed vector.
- the predicted position of the ship SH at each point in time is represented by multiple concentric circles calculated for each of multiple discrete points in time. Without being limited to this, the predicted position of the ship SH at each point in time may be represented by a circle equation that includes the elapsed time from a reference point in time.
- the predicted position of the ship SH is calculated under the assumption that the speed of the ship SH is constant, but this is not limited to the above, and the speed of the ship SH may be treated as a variable that changes with time. In other words, if the predicted position of the ship SH is determined according to the elapsed time from a reference point in time, the speed of the ship SH does not have to be constant. For example, the speed of the ship SH may gradually increase or decrease over time.
- the calculation of the predicted position of the other ship OP is performed under the assumption that the other ship OP will maintain its speed from its current position. In other words, the other ship OP is assumed to continue sailing from the other ship's position at the reference time with the magnitude and direction of the other ship's speed vector being constant. Therefore, the predicted position of the other ship OP at each time point exists on a straight line that is an extension of the other ship's speed vector and passes through the other ship's position at the reference time.
- the predicted position of the other ship OP at each time point is represented by multiple discrete points arranged on a straight line, calculated for each of multiple discrete time points. Without being limited to this, the predicted position of the other ship OP at each time point may be represented by a linear function passing through the other ship's position at the reference time point.
- the predicted position of the other ship OP is calculated under the assumption that the speed of the other ship OP is constant, but this is not limited thereto, and at least one of the speed and direction of the other ship OP may be treated as a variable that changes with time.
- the speed of the other ship OP does not have to be constant.
- the speed of the other ship OP may gradually increase or decrease over time.
- the other ship OP may change course in a specified direction, or turn at a specified ROT (Rate of Turn).
- the risk zone identification unit 23 calculates the distance between the predicted position of the ship SH and the predicted position of the other ship OP at each point in time, and calculates the risk of collision based on the distance and ship size. As described above, the predicted position of the ship SH at a certain point in time is represented by a circle, so the risk zone identification unit 23 extracts the position closest to the predicted position of the other ship OP at the same time from the circle representing the predicted position of the ship SH at a certain point in time, and calculates the distance.
- the risk zone identification unit 23 determines that the risk of collision is above a threshold when a warning zone P set in the area of the own ship SH or around the own ship SH overlaps with a point representing the predicted position of the other ship OP, and identifies multiple risk zones L1, L2 in which the risk of collision is above a threshold.
- the direction of travel of the other ship OP is also referred to as the forward direction, and the opposite direction as the aft direction.
- the aft end L1R of the first risk zone L1 is a position where the forward end of the warning area P of the own ship SH abuts the point representing the predicted position of the other ship OP.
- the forward end L1F of the first risk zone L1 is a position where the aft end of the warning area P of the own ship SH abuts the point representing the predicted position of the other ship OP.
- the aft end L2R of the second risk zone L2 is a position where the aft end of the warning area P of the own ship SH abuts the point representing the predicted position of the other ship OP.
- the forward end L2F of the second risk zone L2 is a position where the forward end of the warning area P of the own ship SH abuts the point representing the predicted position of the other ship OP.
- the range between the first risk zone L1 and the second risk zone L2 is the range in which the ship SH crosses ahead of the other ship OP.
- the range behind the first risk zone L1 and the range ahead of the second risk zone L2 are the range in which the ship SH crosses behind the other ship OP.
- the risk zone identification unit 23 may determine that the risk of collision is above a threshold value, for example, when a warning area P set in the area of the own ship SH or around the own ship SH overlaps with a warning area set in the area of the other ship OP or around the other ship OP.
- the risk zone identification unit 23 may also determine that the risk of collision is above a threshold value, for example, when the distance between a point representing the predicted position of the own ship SH and a point representing the predicted position of the other ship OP is below a threshold value.
- FIG. 14 is a diagram showing an example of the determination of blockage ranges C1 and C2 by the blockage range determination unit 26.
- the blockage range determination unit 26 determines blockage ranges C1 and C2 that represent the angular range in which the ship SH crosses the risk sections L1 and L2 when the ship SH changes course and navigates in any direction.
- the blocked area identification unit 26 identifies blocked areas C1, C2 within a predetermined angle range SA that is based on the ship SH and includes the bow direction F of the ship SH. In other words, the blocked area identification unit 26 identifies blocked areas C1, C2 that are blocked by risk sections L1, L2 within the predetermined angle range SA.
- the blockage range identification unit 26 also calculates the ratio of the blockage ranges C1 and C2 to the angle range SA as the blockage degree. In other words, the quotient of the total angle of the blockage ranges C1 and C2 divided by the angle of the angle range SA is the blockage degree.
- the blockage degree represents the extent to which the ship SH is surrounded by risk sections L1 and L2 (collision risk areas such as OZT).
- Angle range SA is a sector-shaped range centered on the bow direction F of ship SH, excluding the rear range of ship SH.
- the angle range SA corresponds to the area in which ship SH can change course.
- the rear range is, for example, a range exceeding 22 degrees 30 minutes behind beam.
- the blockage range identification unit 26 may determine the angle range SA according to the maneuvering performance of the ship SH. Specifically, in order to determine the angle range SA according to the maneuvering performance of the ship SH, the angle range SA may be determined according to the size or speed of the ship SH. For example, the larger the ship SH is or the faster the ship speed is, the narrower the angle range SA is, and the smaller the ship SH is or the slower the ship speed is, the wider the angle range SA is.
- the blocked area identification unit 26 may limit the identification of blocked areas C1, C2 to risk sections L1, L2 that are within a predetermined distance from the ship SH. In other words, the blocked area identification unit 26 may exclude risk sections that are farther than a predetermined distance from the ship SH from the identification of the blocked area.
- the risk section identification unit 23 may identify multiple risk sections La-Lc for multiple other ships, as shown in Figure 15.
- the blockage range identification unit 26 identifies the blockage range Cm based on the multiple risk sections La-Lc, as shown in Figure 16. This figure shows the angle range SA expanded linearly.
- the blockage area identification unit 26 generates an integrated risk section Lm by integrating multiple risk sections La-Lc in a direction based on the own ship SH, and identifies the blockage area Cm based on the integrated risk section Lm.
- the blockage area identification unit 26 generates the integrated risk section Lm by combining multiple risk sections La-Lc while eliminating overlaps.
- the blockage range identification unit 26 identifies the blockage range at each point in time when the ship SH is navigating the planned route and calculates the degree of blockage. In other words, the blockage range identification unit 26 calculates the degree of blockage over the entire planned route. In this embodiment, the route selection unit 15 selects a part of the planned routes from among the multiple planned routes based on the result of the blockage degree calculation by the blockage range identification unit 26.
- the risk section identification unit 23 identifies risk sections for each of the multiple legs included in the planned route of the ship SH using a method similar to that shown in FIG. 9 above.
- the blocked area identification unit 26 then identifies the blocked area at each point on the planned route and calculates the degree of blockage, thereby calculating the degree of blockage for the entire planned route.
- the risk section identification unit 23 may calculate the maximum blockage degree among the blockage degrees at each time point when the ship SH is navigating the planned route as the blockage degree of the entire planned route, or may calculate the sum or integral value of the blockage degrees at each time point as the blockage degree of the entire planned route.
- the blockage range identification unit 26 calculates the degree of blockage when the ship navigates each of the multiple planned routes calculated by the route generation unit 14.
- the route selection unit 15 selects one of the multiple planned routes based on the blockage degree calculation result and outputs it to the ship steering control unit 10.
- the ship steering control unit 10 controls the ship steering based on the selected planned route.
- the route selection unit 15 selects the planned route with the lowest degree of blockage from among the multiple planned routes.
- the route selection unit 15 may extract all planned routes with a degree of blockage equal to or lower than a predetermined level from among the multiple planned routes, and may display the extracted multiple planned routes on the display unit 2 to prompt the user to select a planned route.
- the multiple planned routes calculated by the route generation unit 14 or extracted by the route selection unit 15 may be displayed on the display unit 2 in a display mode according to the degree of blockage (see FIG. 10 above).
- the degree of blockage is used to assess the risk of the planned route, but this is not limiting, and the degree of blockage may be used, for example, to detect collisions. That is, the degree of blockage may be used as the collision risk value calculated by the collision risk calculation unit 13. When the degree of blockage is used as the collision risk value, weighting may be performed so that the shorter the distance or time to the risk section, the higher the degree of blockage.
- FIG. 17 is a diagram showing an example of the procedure of the navigation support method according to the second embodiment, which is implemented in the navigation support device 1.
- the control unit 20 of the navigation support device 1 executes the information processing shown in the diagram according to a program.
- control unit 20 acquires ship data indicating the ship's position and speed from the GNSS receiver 6 or the like (S11, processing as the ship data acquisition unit 11).
- control unit 20 acquires other ship data indicating the position and speed of other ships from the radar 3, AIS 4, or camera 5 (S12, processing as the other ship data acquisition unit 12).
- control unit 20 generates multiple planned routes (S13, processing as the route generation unit 14). For example, when the collision risk becomes equal to or greater than a predetermined level, the control unit 20 calculates multiple avoidance routes as planned routes.
- the control unit 20 then identifies a risk section for one of the multiple planned routes and one of the multiple other ships (S24, processing as the risk section identification unit 23). The control unit 20 calculates the risk sections for all other ships (S25).
- control unit 20 calculates the degree of blockage of the entire planned route for one of the multiple planned routes (S26, processing as the blockage range identification unit 26).
- the control unit 20 calculates the degree of blockage for all planned routes (S27).
- control unit 20 selects a planned route to be used for ship steering control from among the multiple planned routes based on the calculation result of the blockage degree (S28, processing as the route selection unit 15).
- the selected planned route is output to the ship steering control unit 10.
- [Third embodiment] 18 is a block diagram showing an example of the configuration of the navigation assistance device 1 according to the third embodiment.
- the control unit 20 includes an own ship data acquisition unit 11, an other ship data acquisition unit 12, a collision index calculation unit 33, an avoidance index calculation unit 36, an avoidance determination unit 37, a route calculation unit 38, and an adoption determination unit 39.
- the avoidance determination unit 37 includes a close distance avoidance determination unit 373 and a medium distance avoidance determination unit 376.
- the collision index calculation unit 33 calculates a collision index that indicates the risk of the ship colliding with another ship based on the ship's own data acquired by the ship's own data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12.
- the collision index is an index for determining whether there is an imminent collision that needs to be avoided.
- the collision index is, for example, a collision risk area such as OZT.
- the risk zone (see FIG. 13) identified by the risk zone identification unit 23 is calculated as the collision index.
- the collision index may be, for example, TCPA in a CPA collision warning.
- an avoidance index that indicates the degree to which the ship should avoid other ships is used to determine whether or not it is necessary to avoid risks in the middle distance, thereby realizing ample avoidance.
- the collision index is used to avoid risks that are relatively urgent and located in the near distance, while the avoidance index is used to avoid risks that are relatively less urgent and located in the mid-range, which is farther away than the near distance.
- the avoidance indicators are used to determine whether future risks (e.g., collisions, close encounters, congestion, etc.) should be avoided in advance if the ship navigates the planned route or stays on course.
- the short distance is the range for primarily monitoring relatively urgent risks based on collision indicators (the presence of an imminent collision that must be avoided).
- the medium distance is a range farther than the short distance, but closer than the long distance where future risks can be ignored.
- the avoidance index calculation unit 36 calculates an avoidance index that indicates the degree to which the own ship should avoid other ships, based on the own ship data acquired by the own ship data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12.
- the avoidance index is, for example, the degree of obstruction calculated by the obstruction range identification unit 26, or the degree of intrusion calculated by the intrusion degree calculation unit 16.
- the avoidance index may also be a composite index that combines the degree of obstruction and the degree of intrusion.
- the avoidance determination unit 37 determines whether the ship should avoid the other ship based on the collision index calculated by the collision index calculation unit 33 or the avoidance index calculated by the avoidance index calculation unit 36.
- the close-range avoidance determination unit 373 included in the avoidance determination unit 37 determines whether to avoid the other ship based on the collision index calculated by the collision index calculation unit 33 when there is a risk in the close range (i.e., when the distance or time until the ship reaches the predicted route of the other ship is less than a predetermined value).
- the close distance avoidance determination unit 373 assigns the maximum weight to the collision index for close distances (e.g., multiplies it by 1) and determines whether the weighted collision index is equal to or greater than a threshold value. Then, when the weighted collision index is equal to or greater than a threshold value, the close distance avoidance determination unit 373 determines that the other ship should be avoided.
- the short distance avoidance determination unit 373 assigns a weight to the collision index that gradually decreases as the margin of error (distance or time to reach the risk) increases.
- the threshold applied to the collision index may be gradually increased as the margin of error (distance or time to reach the risk) increases.
- the weight assigned to the collision index may be set to 0.
- avoidance decisions based on the collision index may not be made.
- the mid-distance avoidance determination unit 376 included in the avoidance determination unit 37 determines whether to avoid the other ship based on the avoidance index calculated by the avoidance index calculation unit 36 when there is a risk in the mid-distance (i.e., when the distance or time until the ship reaches the predicted route of the other ship is greater than a predetermined value).
- the mid-distance avoidance determination unit 376 assigns a weight to the avoidance index that gradually increases as the margin of error (distance or time to reach the risk) increases, and determines whether the weighted avoidance index is equal to or greater than a threshold. If the weighted avoidance index is equal to or greater than the threshold, the mid-distance avoidance determination unit 376 determines that other ships should be avoided.
- the medium-distance avoidance determination unit 376 may also calculate the time average of the avoidance index for medium distances, and determine that the other ship should be avoided if the time average of the avoidance index is equal to or greater than a threshold value. This makes it possible to filter out risks that occur only at that moment in the medium distance due to the other ship turning, etc. It is preferable to use the instantaneous value of the collision index for the short distance, and use the time average of the avoidance index for the medium distance.
- the mid-distance avoidance determination unit 376 assigns a weight of 0 to the avoidance index for short distances. This is not limiting, and avoidance determination based on the avoidance index may not be performed for short distances.
- the mid-distance avoidance determination unit 376 may gradually decrease the threshold value applied to the avoidance index for mid-distance as the margin of risk increases.
- the route calculation unit 38 calculates an avoidance route for the ship to avoid the other ship when the avoidance determination unit 37 determines that the other ship should be avoided (similar to the route generation unit 14 described above).
- the route calculation unit 38 calculates an avoidance route by searching for partial routes PR (legs) in sequence from the current position of the ship SH within a range excluding the collision risk area OZ, which is the predicted position of the other ship OP. For example, by using a method such as a binary search method, the route calculation unit 38 searches for an avoidance route to the destination WP by narrowing down the partial routes PR in sequence from the current position of the ship SH.
- the route calculation unit 38 calculates an avoidance route by determining a shorter overall route WP from the current position of the ship SH to the destination position WP that avoids the collision risk area OZ, which is the predicted position of the other ship OP. For example, using a method such as Dijkstra's algorithm, the shortest overall route WP from the current position of the ship SH to the destination WP is searched for, with the endpoints of the collision risk area OZ as nodes gWP.
- the adoption determination unit 39 determines whether or not to adopt the avoidance route generated by the route calculation unit 38 based on the difference between the ship's current planned route and the avoidance route calculated by the route calculation unit 38, and if it is determined that the avoidance route should be adopted, outputs the avoidance route to the ship steering control unit 10.
- the ship steering control unit 10 controls the ship steering based on the avoidance route.
- the adoption determination unit 39 adopts the avoidance route when the amount of change in route from the ship's planned route to the avoidance route is smaller than a threshold, and does not adopt the avoidance route when the amount of change in route is greater than the threshold.
- the route calculation unit 38 calculates the avoidance route and the adoption determination unit 39 determines whether to adopt it again.
- the adoption determination unit 39 may also compare avoidance indicators such as the degree of blockage or intrusion of the planned route and the avoidance route, or other risk values, and adopt the avoidance route when the amount of reduction in the risk value is greater than a threshold, and not adopt the avoidance route when it is less than the threshold. In particular, it is preferable to place importance on the amount of reduction in the risk value for short distances, and on the amount of change in the route for medium distances.
- the planned route of the ship includes cases where the ship simply maintains its course.
- the amount of change in route corresponds to the rudder angle ⁇ at the time of avoidance (see Figures 19 and 20).
- the adoption determination unit 39 sets the route output weight to be larger the smaller the amount of change in the route, and sets the route output weight to be smaller the larger the amount of change in the route, and adopts an avoidance route when the route output weight is equal to or greater than a threshold, and does not adopt an avoidance route when the route output weight is less than a predetermined threshold.
- This type of decision makes it possible to prevent major changes in route and to make it easier to take evasive action.
- FIG. 27 is a diagram showing an example of the procedure of a navigation support method according to the third embodiment, which is implemented in the navigation support device 1.
- the control unit 20 of the navigation support device 1 executes the information processing shown in the diagram according to a program.
- control unit 20 acquires ship data indicating the ship's position and speed from the GNSS receiver 6 or the like (S11, processing as the ship data acquisition unit 11).
- control unit 20 acquires other ship data indicating the position and speed of other ships from the radar 3, AIS 4, or camera 5 (S12, processing as the other ship data acquisition unit 12).
- the control unit 20 calculates a collision index that indicates the risk of the ship colliding with the other ship based on the ship data and the other ship data (S33, processing as the collision index calculation unit 33).
- the collision index is, for example, a collision risk area such as OZT.
- control unit 20 calculates an avoidance index that indicates the degree to which the ship should avoid other ships based on the ship data and the other ship data (S34, processing as the avoidance index calculation unit 36).
- the avoidance index is, for example, the degree of blockage or the degree of intrusion.
- the control unit 20 determines whether or not the ship should avoid the other ship based on the collision index or the avoidance index (S35, processing as the avoidance determination unit 37). Specifically, the control unit 20 determines whether or not the ship should avoid the other ship for short distances based on the collision index, and determines whether or not the ship should avoid the other ship for medium distances based on the avoidance index.
- control unit 20 updates the collision indicator and avoidance indicator and repeats the avoidance determination (S11-S35).
- control unit 20 calculates an avoidance route for the ship to avoid the other ship (S36, processing as the route calculation unit 38).
- control unit 20 determines whether or not to adopt the avoidance route (S37, processing as the adoption determination unit 39). Specifically, the control unit 20 determines whether or not to adopt the avoidance route depending on the amount of change in the route.
- control unit 20 recalculates the avoidance route, updates the collision indicator and avoidance indicator, and repeats the avoidance judgment and adoption judgment (S11-S37).
- the control unit 20 outputs the avoidance route to the ship maneuvering control unit 10 (S38).
- the avoidance route output to the ship maneuvering control unit 10 is used for ship maneuvering control.
- [Fourth embodiment] 28 is a block diagram showing an example of the configuration of the navigation support device 1 according to the fourth embodiment.
- the control unit 20 includes an own ship data acquisition unit 11, an other ship data acquisition unit 12, a route generation unit 14, a meeting relationship determination unit 43, a holding/avoidance determination unit 44, and a collision prevention route evaluation unit 46.
- the route generation unit 14 includes an avoidance route generation unit 451 and a held route generation unit 452.
- Evacuation routes created for the purpose of collision avoidance may be able to avoid collisions, but may not comply with the rules for collision prevention.
- Examples of collision prevention rules include the Convention on International Regulations for Preventing Collisions at Sea (COLREG Convention) or the Act on Preventing Collisions at Sea in Japan.
- a route Rf that crosses the bow of the other ship OP and a route Rr that crosses the stern of the other ship OP may be generated, but the rules for collision prevention prohibit route Rf that crosses the bow of the other ship OP.
- the system determines the meeting relationship between the ship and the other ship, and then determines whether the ship and the other ship are give-way ships or retained ships, and then evaluates whether the planned route complies with the rules for collision prevention.
- the match relationship determination unit 43 determines the match relationship between the own ship and the other ship based on the own ship data acquired by the own ship data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12. Specifically, the match relationship determination unit 43 calculates the course difference between the own ship and the other ship, and classifies the match relationship based on the position and course difference of the other ship relative to the own ship.
- Figure 30 explains the meeting relationship between your ship and another ship.
- Meeting relationships include a crossing relationship, a crossing relationship, and an overtaking relationship.
- a meeting relationship is when your ship and another ship meet directly or almost directly ahead of each other. For example, if the other ship is ahead of your ship and its course is opposite to your ship's course (course difference is approximately 180 degrees), it is determined that you are meeting each other.
- An overtaking relationship is when another ship overtakes your ship from a position aft of your ship.
- the position aft of your ship is, for example, a range that exceeds 22 degrees 30 minutes aft of your ship's beam.
- an overtaking relationship is determined when the other ship is a position aft of your ship and the course of the other ship is close to your ship's course.
- a crossing relationship is when one of your ship and another ship crosses the course of the other. For example, if the other ship is within port range of your ship and its course points to the starboard side of your ship, or if the other ship is on your starboard side and its course points to the port side of your ship, it is determined to be in a crossing relationship.
- the retention/avoidance determination unit 44 determines whether the own ship or the other ship is a retained ship, an avoidance ship, or neither, based on the own ship data acquired by the own ship data acquisition unit 11, the other ship data acquired by the other ship data acquisition unit 12, and the match relationship determined by the match relationship determination unit 43 (hereinafter referred to as retention/avoidance determination).
- a ship when a ship is selected as a vessel to be held or given way, the other ship is also selected as a vessel to be held or given way.
- Figure 31 is a diagram explaining the relationship between the holding vessel and the give-way vessel.
- Figure 32 is a diagram explaining the positive and negative course difference. When the course of another vessel deviates clockwise from the course of the vessel, it is considered “positive,” and when it deviates counterclockwise, it is considered “negative.”
- the hold/avoid judgment unit 44 judges that the own ship and the other ship are hold ships or avoidance ships.
- An indicator of the approach of another ship to the ship may be, for example, the time it takes for the other ship to cross the ship's bow line (BCT: Bow Crossing Time).
- BCT Bow Crossing Time
- TCPA Time to Closest Point of Approach
- an indicator of the approach of another ship to the ship may be, for example, the distance between the ship and the other ship.
- the judgment criteria are determined according to the course difference between the own ship and the other ship. In other words, judgment criteria are determined for each course difference between the own ship and the other ship, and the judgment criteria change as the course difference changes within at least a certain range.
- the holding/avoiding determination unit 44 determines that the ship and the other ship are holding ships or giving way ships when the BCT is equal to or less than the reference time T1 or when the ship-to-ship distance is equal to or less than the reference distance D1. On the other hand, the holding/avoiding determination unit 44 determines that the ship and the other ship are neither holding ships nor giving way ships when the BCT exceeds the reference time T1 or when the ship-to-ship distance exceeds the reference distance D1.
- the logical sum of the conditions related to the BCT and the conditions related to the distance between the ships is used to determine whether a ship is a holding ship or an giving way ship, but this is not limited to the above, and the determination may be made based on the logical product of the two conditions, or using only one of the two conditions.
- Figures 33 and 34 are graphs showing the relationship between the course difference (COGdiff: Course Over Ground Difference) between the own ship and other ships and the BCT reference times T1 and T2. Since the course difference roughly corresponds to the course difference, Figure 33 also shows the relationship between the course difference and the course difference.
- Figure 34 shows a virtual frame surrounding the own ship representing the reference time T1 to make the relationship between the course difference and the reference time T1 easier to understand.
- the reference time T1 increases as the heading difference increases. In ranges where the heading difference is smaller than this range, the reference time T1 is constant. As a result, as shown in Figure 34, the frame representing the reference time T1 extends forward of the ship, and the larger the heading difference, the earlier the timing at which the ship is determined to be a held ship or an give-way ship.
- the relationship between the heading difference and the reference time T1 is not limited to this example.
- the reference time T1 may increase as the heading difference increases over the entire range of the heading difference, or the reference time T1 may increase in a stepped manner as the heading difference increases, as in the reference distance D1 described below (see Figure 35).
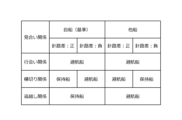
- the maintenance/avoidance determination unit 44 determines that the ship is an avoidance vessel when the meeting relationship changes to an avoidance relationship and the BCT is equal to or less than the reference time T1. At this time, the other ship is also determined to be an avoidance vessel.
- the holding/avoidance determination unit 44 determines that the ship is an avoidance ship when the ship is in a crossing relationship where the ship sees the other ship on its starboard side (i.e., a crossing relationship where the course difference is negative) and the BCT is equal to or less than the reference time T1. At this time, the other ship is determined to be a holding ship.
- the holding/avoidance determination unit 44 determines that the ship is a holding ship when the meeting relationship changes to an overtaking relationship and the BCT is equal to or less than the reference time T1. At this time, the other ship is determined to be an avoidance ship.
- the holding/avoidance determination unit 44 determines that the ship is a holding ship when the ship is in a crossing relationship where the ship sees the other ship on its port side (i.e., a crossing relationship where the course difference is positive) and the BCT is equal to or less than the reference time T1. At this time, the other ship is determined to be an avoidance ship.
- the holding/avoidance determination unit 44 may also determine that the ship is an give-way ship if, after the ship is determined to be a held ship, the BCT further drops to below a reference time T2 that is smaller than reference time T1. In other words, if the ship is a held ship and another ship is an give-way ship, but the other ship does not give way and instead approaches further, causing the BCT to drop further, the determination result is switched from a held ship to an give-way ship.
- the reference time T2 for switching from the held vessel to the give-way vessel is set only in cases of a crossing relationship in which the vessel is looking at the other vessel on its port side (i.e., a crossing relationship in which the course difference is positive), but this is not limiting and the reference time T2 may also be set in cases of an overtaking relationship.
- Figures 35 and 36 are graphs showing the relationship between the course difference (COGdiff) between one's own ship and another ship and the reference distances D1 and D2 for the distance between the ships. Since the heading relationship roughly corresponds to the heading difference, Figure 35 also shows the relationship between the heading difference and the heading relationship.
- Figure 36 shows a virtual frame representing the reference distance D1, surrounding one's own ship, to make the relationship between the heading difference and the reference distance D1 easier to understand.
- the reference distance D1 increases as the heading difference increases. In ranges where the heading difference is larger and smaller than that range, the reference distance D1 is constant. In other words, the reference distance D1 increases in steps as the heading difference increases. As a result, as shown in Figure 36, the frame representing the reference distance D1 is larger at the front than at the rear, and the larger the heading difference, the earlier the timing at which the ship is determined to be a holding ship or an give-way ship.
- the relationship between the heading difference and the reference distance D1 is not limited to this example.
- the reference distance D1 may increase as the heading difference increases in the entire range of the heading difference, or the reference distance D1 may increase exponentially in a range where the heading difference is large, such as the reference time T1 described above (see Figure 33).
- the maintenance/avoidance determination unit 44 determines that the ship is an avoidance vessel when the meeting relationship changes to an avoidance relationship and the distance between the ships is equal to or less than the reference distance D1. At this time, the other ship is also determined to be an avoidance vessel.
- the holding/avoidance determination unit 44 determines that the ship is an avoidance ship when the ship is in a crossing relationship where the ship sees the other ship on its starboard side (i.e., a crossing relationship where the course difference is negative) and the distance between the ships is less than or equal to the reference distance D1. At this time, the other ship is determined to be a holding ship.
- the keeping/avoiding determination unit 44 determines that the ship in question is a keeping ship when the meeting relationship changes to an overtaking relationship and the distance between the ships is equal to or less than the reference distance D1. At this time, the other ship is also determined to be an avoiding ship.
- the holding/avoidance determination unit 44 determines that the ship is a holding ship when the ship is in a crossing relationship where the ship sees the other ship on its port side (i.e., a crossing relationship where the course difference is positive) and the distance between the ships is less than or equal to the reference distance D1. At this time, the other ship is determined to be an avoidance ship.
- the holding/avoidance determination unit 44 may also determine that the own ship is an give-way ship if, after the own ship has been determined to be a held ship, the inter-ship distance becomes even shorter and is equal to or shorter than reference distance D2, which is smaller than reference distance D1. In other words, if the own ship is the held ship and the other ship is the give-way ship, but the other ship does not give way and instead approaches further, further reducing the inter-ship distance, the determination result is switched from the held ship to the give-way ship.
- the reference distance D2 for switching from the held vessel to the give-way vessel is set only in cases of a crossing relationship in which the vessel is looking at the other vessel on its port side (i.e., a crossing relationship in which the course difference is positive), but this is not limiting and the reference distance D2 may also be set in cases of an overtaking relationship.
- the holding/avoidance determination unit 44 may further add to its determination criteria whether another ship is approaching the ship. In other words, when the BCT is equal to or less than the reference time T1 or the distance between the ships is equal to or less than the reference distance D1, and when another ship is approaching the ship, the holding/avoidance determination unit 44 determines that the ship and the other ship are holding ships or avoidance ships.
- the holding/avoidance determination unit 44 determines that the ship and the other ship are neither a holding ship nor an avoidance ship.
- Whether or not another ship is approaching your ship can be determined, for example, by the positive or negative value of TCPA. If another ship is approaching your ship, TCPA will be a positive value, and if the other ship is moving away from your ship, TCPA will be a negative value.
- the meeting relationship determination unit 43 may determine the meeting relationship based only on the course difference between the ship and the other ship, without taking into account the positions of the ship and the other ship.
- the holding/avoiding determination unit 44 may determine that the ship or the other ship is neither a holding ship nor an avoiding ship.
- Whether your ship or another ship has taken evasive action can be determined by a change in the course difference (COGdiff) between your ship and the other ship, or a change in the BCT or line distance to the non-applicable side, etc.
- COGdiff course difference
- the meeting relationship determination unit 43 may determine the meeting relationship based only on the course difference between the ship and the other ship, without taking into account the positions of the ship and the other ship.
- the route generation unit 14 calculates a planned route when the holding/avoidance determination unit 44 determines that the ship in question is a held ship or an avoidance ship.
- the avoidance route generation unit 451 included in the route generation unit 14 calculates a planned route (hereinafter also referred to as an "avoidance route") for acting as an avoidance vessel when the retention/avoidance determination unit 44 determines that the vessel itself is an avoidance vessel.
- the avoidance route is generated so as to avoid other vessels.
- the retained route generation unit 452 included in the route generation unit 14 calculates a planned route for operating as a retained ship (hereinafter also referred to as a "retained route") when the retained/avoidance determination unit 44 determines that the ship is a retained ship.
- a retained route is a route that does not avoid other ships.
- the collision prevention route evaluation unit 46 evaluates the planned route generated by the route generation unit 14 according to the match relationship determined by the match relationship determination unit 43. Specifically, the collision prevention route evaluation unit 46 evaluates whether the planned route complies with the rules for collision prevention.
- the collision prevention route evaluation unit 46 If the evaluation result of the planned route meets the predetermined criteria, the collision prevention route evaluation unit 46 outputs the planned route to the ship steering control unit 10.
- the ship steering control unit 10 controls the ship's steering based on the planned route.
- the collision prevention route evaluation unit 46 has the route generation unit 14 calculate a new planned route and evaluates the planned route again.
- the collision prevention route evaluation unit 46 evaluates whether the give-way route is appropriate. In other words, it evaluates whether the give-way route is appropriate as a route for acting as an give-way ship.
- the collision prevention rules stipulate that an give-way ship "must take action as early and as drastic as possible.” Therefore, the collision prevention route evaluation unit 46 judges whether the give-way route meets this regulation.
- the collision prevention route evaluation unit 46 determines whether the time until avoidance begins on the collision avoidance route is equal to or less than a threshold value. In other words, it determines whether avoidance begins "as early as possible.” As shown in FIG. 37, when the distance from the current position of the ship SH on the collision avoidance route AR to the avoidance start waypoint WP1 is D and the ship speed of the ship SH is vo, it is determined whether the time until avoidance begins D/vo is equal to or less than a threshold value.
- the collision prevention route evaluation unit 46 also determines whether the steering angle at the time of avoidance on the avoidance route is equal to or greater than a threshold value. In other words, it determines whether a "significant movement" is being made. As shown in FIG. 37, it determines whether the steering angle ⁇ at the time of avoidance, which is represented by the angle difference between the line segment from the current position of the ship SH to the avoidance start waypoint WP1 and the line segment from the avoidance start waypoint WP1 to the next waypoint WP2, is equal to or greater than a threshold value.
- the collision prevention route evaluation unit 46 determines whether or not the ship and the other ship are in a specified positional relationship at a point on the avoidance route. Specifically, the collision prevention route evaluation unit 46 evaluates the relative positional relationship between the ship and the other ship at or near the closest point on the avoidance route where the ship and the other ship are closest to each other.
- the closest point of approach is found by calculating the TCPA for each leg included in the avoidance route. For example, the closest point of approach is found as the TCPA when the condition TCPA ⁇ leg end time is met.
- the collision prevention route evaluation unit 46 determines whether the ship SH and the other ship OP are in a port-to-port relationship at the closest point of approach on the avoidance route AR. In other words, it determines whether each ship will pass on the other ship's port side.
- the collision prevention route evaluation unit 46 determines whether the ship SH passes in the stern direction of the other ship OP at the closest point of approach on the avoidance route AR. For example, it determines whether the BCT as seen from the ship SH at the closest point of approach is negative.
- the collision prevention route evaluation unit 46 determines whether the distance between the ship SH and the other ship OP is equal to or greater than a predetermined value at the closest point on the avoidance route AR.
- the collision prevention route evaluation unit 46 evaluates whether the held route is appropriate. In other words, it evaluates whether the held route is appropriate as a route for operating as a held ship.
- the rules for collision prevention stipulate that a held ship "must maintain its course and speed.” Therefore, the collision prevention route evaluation unit 46 determines whether the course and total force are constant throughout the held route.
- the collision prevention route evaluation unit 46 may display that fact on the display unit 2. In addition, the collision prevention route evaluation unit 46 may display the planned route on the display unit 2, as well as the position or timing at which the planned route does not comply with the rules for collision prevention, and the reason for this.
- FIGS. 41 and 42 are diagrams showing an example of the procedure of the navigation support method according to the fourth embodiment, which is realized in the navigation support device 1.
- the control unit 20 of the navigation support device 1 executes the information processing shown in these diagrams according to a program.
- control unit 20 acquires ship data indicating the ship's position and speed from the GNSS receiver 6 or the like (S11, processing as the ship data acquisition unit 11).
- control unit 20 acquires other ship data indicating the position and speed of other ships from the radar 3, AIS 4, or camera 5 (S12, processing as the other ship data acquisition unit 12).
- control unit 20 determines the meeting relationship between the own ship and the other ship based on the own ship data and the other ship data (S43, processing as the meeting relationship determination unit 43).
- the meeting relationship between the own ship and the other ship is classified as a meeting relationship, a crossing relationship, or an overtaking relationship.
- control unit 20 calculates the time until the other ship crosses the bow line of the own ship (BCT) and the distance between the own ship and the other ship based on the own ship data and the other ship data (S44), and performs a holding/avoidance judgment (S45-S47, processing as the holding/avoidance judgment unit 44).
- control unit 20 determines whether the BCT is equal to or shorter than the reference time T1 or whether the ship-to-ship distance is equal to or shorter than the reference distance D1 (S45).
- the control unit 20 determines that the ship and the other ship are neither retained ships nor give-way ships (S47) and ends the process.
- the control unit 20 determines whether the ship and the other ship are each a retained ship or an avoidance ship (S46).
- both your ship and the other ship are determined to be "give way vessels", in a crossing relationship where the course difference is positive, your ship is determined to be the "holding vessel” and the other ship is determined to be the "give way vessel”, in a crossing relationship where the course difference is negative, your ship is determined to be the "give way vessel” and the other ship is determined to be the "holding vessel”, and in an overtaking relationship, your ship is determined to be the "holding vessel” and the other ship is determined to be the "give way vessel”.
- the control unit 20 then calculates a planned route (S51, processing as the route generation unit 14). Specifically, if the ship is an "avoidance ship", the control unit 20 calculates an avoidance route for acting as an avoidance ship (processing as the avoidance route generation unit 451), and if the ship is a "retained ship", the control unit 20 calculates a retained route for acting as a retained ship (processing as the retained route generation unit 452).
- the control unit 20 evaluates whether the time until the start of avoidance on the avoiding route is below a threshold and whether the rudder angle at the time of avoidance is above a threshold (S53, processing as the collision prevention route evaluation unit 46). Furthermore, the control unit 20 evaluates the relative relationship between the own ship and the other ship at the closest point on the avoiding route (S54, processing as the collision prevention route evaluation unit 46).
- the control unit 20 determines whether the course and speed are constant throughout the entire held route (S55, processing as the collision prevention route evaluation unit 46).
- the control unit 20 determines whether or not to adopt the planned route depending on the evaluation result of the planned route (S56). For example, it may determine to adopt the planned route if all conditions are met, such as the time until the start of avoidance is less than a threshold, the rudder angle at the time of avoidance is greater than or equal to a threshold, etc., or it may convert these conditions into points and determine to adopt the planned route if the total score is greater than or equal to a threshold.
- the control unit 20 If it is determined that the planned route is to be adopted (S56: YES), the control unit 20 outputs the planned route to the ship steering control unit 10 (S57). The planned route output to the ship steering control unit 10 is used for ship steering control. On the other hand, if it is determined that the planned route is not to be adopted (S56: NO), the control unit 20 executes again the series of processes S51-S56 for calculating and evaluating the planned route.
- [Fifth embodiment] 43 is a block diagram showing an example of the configuration of the navigation support device 1 according to the fifth embodiment.
- the control unit 20 includes an own ship data acquisition unit 11, an other ship data acquisition unit 12, a route generation unit 14, a route selection unit 15, and a risk value calculation unit 51.
- the risk value calculation unit 51 calculates multiple types of risk values that represent the risk of the ship approaching other ships using different indices when the ship navigates each of the multiple candidate routes generated by the route generation unit 14, based on the ship's own data acquired by the ship's own data 11 and the other ship data acquired by the other ship data acquisition unit 12.
- the risk value calculation unit 51 includes an intrusion degree calculation unit 16, a risk section identification unit 23, a blockage range identification unit 26, an avoidance index calculation unit 36, a mid-distance avoidance determination unit 376, a match relationship determination unit 43, and a collision prevention route evaluation unit 46.
- the intrusion degree calculation unit 16 calculates the intrusion degree when the ship is navigating the candidate route as one of several types of risk values (see Figures 4 to 9). That is, the intrusion degree calculation unit 16 has a risk coefficient that is determined according to the direction based on the ship SH, and calculates the intrusion degree when another ship OP is predicted to intrude into the bumper area BM, where the risk coefficient RC increases the closer the ship is to the ship SH in each direction based on the ship SH.
- the risk section identification unit 23 calculates the presence or absence of a collision risk area such as OZT on the candidate route as one of several types of risk values (see Figure 13). In other words, the risk section identification unit 23 identifies risk sections L1 and L2 on the predicted route R of the other ship OP where there is a risk of collision between the own ship SH and the other ship OP when it is assumed that the own ship SH changes course in an arbitrary direction and navigates across the predicted route R of the other ship OP.
- a collision risk area such as OZT
- the risk section identification unit 23 may calculate the presence or absence of a collision risk area on a candidate route as a risk value to be used when a collision risk area is in the vicinity (i.e., when the distance or time to reach the destination is less than a predetermined value).
- the blockage range identification unit 26 calculates the blockage range or degree of blockage when the ship SH navigates the candidate route as one of several types of risk values (see Figures 14 to 16). That is, the blockage range identification unit 26 identifies blockage ranges C1, C2 that represent the angular range in which the ship SH crosses the risk sections L1, L2 identified by the risk section identification unit 23 when the ship SH changes course and navigates in any direction, and calculates the ratio of the blockage ranges C1, C2 to the angular range SA as the degree of blockage.
- the avoidance index calculation unit 36 calculates the avoidance index when the ship navigates the candidate route as a risk value to be used when there is a risk related to the avoidance index in the mid-range (i.e., when the distance or time to reach is greater than a predetermined value).
- the mid-range avoidance determination unit 376 may determine whether the avoidance index, weighted so that it gradually increases as the margin of error to the risk increases, is equal to or greater than a threshold value, or may gradually decrease the threshold value applied to the avoidance index as the margin of error to the risk increases (see Figures 22 and 23).
- the collision prevention route evaluation unit 46 calculates an evaluation value of the candidate route according to the match relationship determined by the match relationship determination unit 43 as one of multiple types of risk values.
- the collision prevention route evaluation unit 46 evaluates whether the candidate route complies with the rules for collision prevention, i.e., whether the avoidance route is appropriate when the ship is an avoiding ship, and whether the retained route is appropriate when the ship is a retained ship (see Figures 37 to 40).
- the route selection unit 15 selects a part of the multiple planned routes based on the multiple types of risk values calculated for each of the multiple candidate routes. Specifically, the route selection unit 15 selects the candidate route that has the smallest sum of the multiple types of risk values from the multiple candidate routes, and outputs it to the ship steering control unit 10. The ship steering control unit 10 controls the ship's steering based on the selected planned route.
- the route selection unit 15 may also increase the weight of a specific risk value among multiple types of risk values (by multiplying it by a coefficient of 1 or more) to calculate a weighted sum and select a candidate route that minimizes the weighted sum.
- the weight of the risk values may be adjustable by the user. This allows for an evaluation that matches the user's sense of risk.
- the route selection unit 15 may extract all planned routes for which the sum of multiple types of risk values is equal to or less than a predetermined value, and may display the extracted multiple planned routes on the display unit 2 to prompt the user to select a planned route.
- the multiple planned routes calculated by the route generation unit 14 or extracted by the route selection unit 15 may be displayed on the display unit 2 in a display mode according to the multiple types of risk values (see FIG. 10 above).
- FIG. 44 is a diagram showing an example of the procedure of the navigation support method according to the fifth embodiment, which is realized in the navigation support device 1.
- the control unit 20 of the navigation support device 1 executes the information processing shown in the diagram according to a program.
- control unit 20 acquires ship data indicating the ship's position and speed from the GNSS receiver 6 or the like (S11, processing as the ship data acquisition unit 11).
- control unit 20 acquires other ship data indicating the position and speed of other ships from the radar 3, AIS 4, or camera 5 (S12, processing as the other ship data acquisition unit 12).
- control unit 20 generates multiple candidate routes (S13, processing as the route generation unit 14).
- the control unit 20 executes the processing of S61-S66 below for each of the multiple candidate routes.
- control unit 20 calculates the intrusion degree when the ship navigates the candidate route (S61, processing as the intrusion degree calculation unit 16).
- control unit 20 calculates whether there are any collision risk areas on the candidate route (S62, processing as the risk section identification unit 23).
- control unit 20 calculates the blockage range and blockage degree when the ship navigates the candidate route (S63, processing as the blockage range identification unit 26).
- control unit 20 calculates the avoidance index when the ship navigates the candidate route (S64, processing as the avoidance index calculation unit 36).
- control unit 20 calculates an evaluation value of the candidate route according to the match relationship (S65, processing as the collision prevention route evaluation unit 46).
- control unit 20 evaluates the candidate routes based on the calculation results from the above processes S61-S65 (S66). The control unit 20 executes the above processes S61-S66 for all the candidate routes (S67).
- control unit 20 selects a candidate route to be used for ship steering control from among the multiple candidate routes based on the evaluation results (S68, processing as the route selection unit 15).
- the selected candidate route is output to the ship steering control unit 10.
- Sixth Embodiment 45 is a block diagram showing an example of the configuration of the navigation support device 1 according to the sixth embodiment.
- the control unit 20 includes an own ship data acquisition unit 11, an other ship data acquisition unit 12, an index calculation unit 63, a route calculation unit 64, a route classification unit 65, an information calculation unit 66, a display control unit 67, and an operation reception unit 68.
- the index calculation unit 63 calculates a risk index representing the risk of the ship colliding with an obstacle such as another ship based on the ship's own data acquired by the ship's own data acquisition unit 11 and the other ship data acquired by the other ship data acquisition unit 12 (similar to the collision risk calculation unit 13 described above). For example, the index calculation unit 63 calculates a collision risk area such as OZT or TCPA of a CPA collision warning as a risk index.
- the route calculation unit 64 calculates multiple candidate routes for the ship (similar to the route generation unit 14 described above). For example, the route calculation unit 64 calculates multiple avoidance routes to avoid collision with obstacles such as other ships as multiple candidate routes based on the risk index calculated by the index calculation unit 63. As shown in FIG. 46, the route calculation unit 64 calculates multiple candidate routes CR from the ship SH toward the target point DS so as to avoid collision with another ship OP.
- the route calculation unit 64 may obtain multiple candidate routes from other devices such as ECDIS 8.
- each representative route is narrowed down, making it possible to present candidate routes to the user in an easy-to-understand manner.
- the route classification unit 65 divides the multiple candidate routes generated by the route calculation unit 64 into multiple groups based on similarity, and determines a representative route for each group. In other words, the route classification unit 65 integrates the multiple candidate routes into groups, and selects a representative route that represents each group. The number of groups is smaller than the number of candidate routes.
- the route classification unit 65 divides the multiple candidate routes into multiple groups by clustering.
- clustering known methods such as K-Means, DBSCAN, and Mean-shift can be used.
- the number of groups divided by clustering may be a predetermined number specified in advance by the user.
- each of the multiple candidate routes CR1-CR4 is made up of points (nodes) SD arranged in order from the start S to the goal G.
- the similarity of the candidate routes CR1-CR4 is evaluated, for example, based on the positional relationship of the points SD at each time.
- candidate route CR1 is in group Ga
- candidate routes CR2 and CR3 which are relatively close to point SD
- candidate route CR4 is in group Gc.
- grouping is performed within each group, and when a new group is generated, further grouping is performed within each group including the new group. This type of grouping is performed sequentially at each time from the start S to the goal G.
- the route classification unit 65 may group multiple candidate routes using methods other than clustering.
- the above describes an example of clustering based on the two-dimensional spatial position of the route (including the turning angle), but this is not limiting.
- clustering based on route evaluation values such as the distance to the goal, fuel consumption, and risks encountered may also be applied.
- the route classification unit 65 may divide the multiple candidate routes into multiple groups based on the positions of the point clouds that make up each of the multiple candidate routes. For example, if the distance between the points SD of the multiple candidate routes at each time is less than a predetermined value, or if the density of the points SD at each time is greater than or equal to a predetermined value, the candidate routes are grouped together.
- the route classification unit 65 may also divide the multiple candidate routes into multiple groups based on the course change angle of each of the multiple candidate routes. For example, if the course change angle range for multiple candidate routes is equal to or less than a predetermined value, those candidate routes are grouped together.
- the course change angles to be compared may be the course change angle at point SD at each time, or the course change angle for the entire candidate route.
- the route classification unit 65 determines a representative route for each group from among the candidate routes that have been grouped into multiple groups. This narrows down the number of representative routes RR to a smaller number than the candidate routes CR, as shown in FIG. 50.
- the route classification unit 65 determines the representative route based on the length of the candidate routes. For example, the shortest candidate route among the candidate routes included in the same group is determined as the representative route.
- the route classification unit 65 may also determine the representative route based on the number of wayfinding points of the candidate routes. For example, among the candidate routes included in the same group, the candidate route with the fewest wayfinding points is determined as the representative route.
- the route classification unit 65 may also determine the representative route based on a risk index when navigating the candidate route. For example, among the candidate routes included in the same group, the candidate route that has the least chance of encountering collision risk areas is determined as the representative route.
- the information calculation unit 66 calculates the route information for each representative route selected by the route classification unit 65.
- the route information represents the conditions predicted to occur when the ship navigates the representative route.
- the route information is useful for selecting a route, such as the travel distance of the representative route, fuel consumption, other ships encountered, or the degree of congestion.
- the display control unit 67 displays each representative route selected by the route classification unit 65 on the display unit 2.
- the display control unit 67 also displays the route information calculated by the information calculation unit 66 on the display unit 2 together with the representative routes.
- the operation reception unit 68 receives operation input from the user via the touch panel of the display unit 2. Specifically, the operation reception unit 68 receives the selection of the representative route displayed on the display unit 2. The operation reception unit 68 also receives adjustments to the similarity for grouping.
- the image MG displayed on the display unit 2 shows multiple representative routes RR from the current position of the ship SH to the destination DS.
- the selected representative route RR is displayed in an identifiable manner.
- the image MG also shows a collision risk area OZ that is predicted to occur when navigating the selected representative route RR.
- the image MG also displays a balloon JH showing route information for the selected representative route RR.
- the balloon JH displays route information such as the distance traveled when traveling the selected representative route RR, the predicted arrival time to the destination DS, and the number of ships encountered.
- the identification display of the representative route RR is, for example, a so-called highlight display in which the display mode, such as the thickness, brightness, or color, of the selected representative route RR is made different from that of the other representative routes RR. Also, the selected representative route RR may be left as it is, and the other representative routes RR may be displayed transparently.
- Figures 52 to 54 are diagrams for explaining in more detail the identification display of the representative route RR.
- the central representative route RR1 is selected, the selected representative route RR1 is identified and the other lines OP1-OP3 that will approach when sailing along the representative route RR1 and their associated collision risk areas OZ are identified and displayed.
- the selected representative route RR2 is displayed in an identifiable manner, and the other ship OP1 that will approach if the ship travels along the representative route RR2 and its associated collision risk area OZ are also displayed in an identifiable manner.
- the other ships OP2 and OP3 that will not approach if the ship travels along the representative route RR2 are displayed transparently.
- the route classification unit 65 uses the adjusted similarity to again group the candidate routes and determine the representative route for each group, and the display control unit 67 updates the display of the representative routes. This allows the user to adjust the similarity and change the number of representative routes while viewing the image MG displayed on the display unit 2.
- FIG. 55 is a diagram showing an example of the procedure of the navigation support method according to the sixth embodiment, which is realized in the navigation support device 1.
- the control unit 20 of the navigation support device 1 executes the information processing shown in the diagram according to a program.
- control unit 20 acquires ship data indicating the ship's position and speed from the GNSS receiver 6 or the like (S11, processing as the ship data acquisition unit 11).
- control unit 20 acquires other ship data indicating the position and speed of other ships from the radar 3, AIS 4, or camera 5 (S12, processing as the other ship data acquisition unit 12).
- control unit 20 generates multiple candidate routes (S13, processing as the route calculation unit 64).
- control unit 20 divides the candidate routes into groups based on the similarity and determines a representative route for each group (S71, S72, processing as the route classification unit 65).
- control unit 20 calculates route information for each representative route (S73, processing as the information calculation unit 66).
- control unit 20 displays each representative route on the display unit 2 (S74, processing as the display control unit 67, see Figures 51 to 54).
- the control unit 20 displays the selected representative route in an easily identifiable manner and also displays the route information of the selected representative route (S76, S77, processing as the display control unit 67, see Figures 51 to 54).
- the control unit 20 When the representative route is determined (S78: YES), the control unit 20 outputs the determined representative route to the ship steering control unit 10 (S79).
- the representative route output to the ship steering control unit 10 is used for ship steering control.
- FIG. 56 is a block diagram showing an example of the configuration of a navigation support device 1 according to a comprehensive embodiment that encompasses the first to sixth embodiments described above.
- a first acquisition unit that acquires first vessel data including a position and a velocity of the first vessel
- a second acquisition unit that acquires second vessel data including a position and a velocity of the second vessel
- an intrusion degree calculation unit that calculates an intrusion degree when the second ship is predicted to intrude into a bumper area having a risk coefficient determined according to a direction based on the first ship, the risk coefficient becoming higher the closer the bumper area is to the first ship in each direction based on the first ship, based on the first ship data, the second ship data, and the risk coefficient
- a navigation aid device comprising:
- the intrusion degree calculation unit calculates, as the intrusion degree, a maximum value of the risk coefficient when the intrusion of the second vessel into the bumper area while the first vessel is sailing.
- a navigation support device as described in (1).
- the intrusion degree calculation unit calculates, as the intrusion degree, an integral value of the risk coefficient when the intrusion of the second vessel into the bumper area while the first vessel is sailing.
- a navigation support device as described in (1).
- the second acquisition unit acquires the second ship data of each of the second ships
- the intrusion degree calculation unit calculates the intrusion degree when intrusion of a plurality of the second vessels into the bumper area is predicted
- a navigation support device according to any one of (1) to (3).
- the intrusion degree calculation unit calculates, as the intrusion degree, a maximum value or a total value of an integral value of the risk coefficient when the intrusion of each of the second vessels into the bumper area while the first vessel is sailing.
- a navigation support device as described in (4).
- the intrusion degree calculation unit calculates, as the intrusion degree, a maximum value of a maximum value or an integral value of the risk coefficient when an intrusion of the second vessel into the bumper area while the first vessel is sailing.
- a navigation support device as described in (4).
- the intrusion degree calculation unit calculates, as the intrusion degree, a maximum value of sums of the risk coefficients at each time point when intrusions of a plurality of the second vessels into the bumper area while the first vessel is sailing.
- a navigation support device as described in (4).
- a route acquisition unit that acquires a planned route of the first vessel is further provided, the intrusion degree calculation unit calculates the intrusion degree when the first vessel navigates along the planned route, A navigation support device according to any one of (1) to (7).
- the route acquisition unit acquires a plurality of the planned routes, the intrusion degree calculation unit calculates the intrusion degree when the first vessel navigates each of the planned routes, a route selection unit that selects a part of the planned routes from among the plurality of planned routes based on a result of the calculation of the penetration degree;
- a navigation support device as described in (8).
- the route selection unit selects a planned route having a penetration degree equal to or less than a predetermined value from among the plurality of planned routes.
- a navigation support device as described in (9).
- a display unit that displays the plurality of planned routes in a display mode according to the penetration degree is further provided.
- a navigation support device as described in (9) or (10).
- the intrusion degree calculation unit corrects the intrusion degree to be high when the second vessel is present simultaneously in both a range in the bow direction and port direction of the first vessel and a range in the bow direction and starboard direction of the first vessel within the bumper area.
- a navigation support device according to any one of (4) to (7).
- the intrusion degree calculation unit corrects the risk coefficient to be higher when the second ship is present simultaneously in both a range in the bow direction and port direction of the first ship and a range in the bow direction and starboard direction of the first ship within the bumper area.
- a navigation support device according to any one of (4) to (7).
- the bumper region has a shape that is wider in a bow direction than in a stern direction of the first vessel.
- a navigation support device according to any one of (1) to (14).
- the bumper area has a shape that is wider on the starboard side of the first vessel than on the port side.
- a navigation support device according to any one of (1) to (15).
- first vessel data including a position and a velocity of the first vessel
- second vessel data including a position and a velocity of a second vessel
- a bumper area having a risk coefficient determined according to a direction based on the first ship, the risk coefficient increasing as the second ship approaches the first ship in each direction based on the first ship, and an intrusion degree when the second ship is predicted to intrude into the bumper area is calculated based on the first ship data, the second ship data, and the risk coefficient
- first vessel data including a position and a velocity of the first vessel
- second ship data including a position and a speed of a second ship
- risk coefficient an intrusion degree when the second ship is predicted to intrude into a bumper area having a risk coefficient determined according to a direction based on the first ship, the risk coefficient increasing as the second ship approaches the first ship in each direction based on the first ship
- All processes described herein may be embodied and fully automated by software code modules executed by a computing system including one or more computers or processors.
- the code modules may be stored in any type of non-transitory computer-readable medium or other computer storage device. Some or all of the methods may be embodied in dedicated computer hardware.
- the various exemplary logic blocks and modules described in connection with the embodiments disclosed herein may be implemented or executed by a machine such as a processor.
- the processor may be a microprocessor, but alternatively the processor may be a controller, a microcontroller, or a state machine, or a combination thereof.
- the processor may include electrical circuitry configured to process computer-executable instructions.
- the processor includes an application specific integrated circuit (ASIC), a field programmable gate array (FPGA), or other programmable device that performs logical operations without processing computer-executable instructions.
- ASIC application specific integrated circuit
- FPGA field programmable gate array
- the processor may also be implemented as a combination of computing devices, such as a combination of a digital signal processor and a microprocessor, multiple microprocessors, one or more microprocessors in combination with a DSP core, or any other such configuration. Although described herein primarily with respect to digital technology, the processor may also include primarily analog elements. For example, some or all of the signal processing algorithms described herein may be implemented by analog circuitry or mixed analog and digital circuitry.
- the computing environment can include any type of computer system, including, but not limited to, a computer system based on a microprocessor, a mainframe computer, a digital signal processor, a portable computing device, a device controller, or a computational engine within an appliance.
- conditional language such as “can,” “could,” “would,” or “potential” is understood within the context in which it is generally used to convey that certain embodiments include certain features, elements, and/or steps, while other embodiments do not. Thus, such conditional language does not generally imply that features, elements, and/or steps are required in any manner in one or more embodiments, or that one or more embodiments necessarily include logic for determining whether those features, elements, and/or steps are included in or performed in any particular embodiment.
- Disjunctive language such as "at least one of X, Y, Z" is understood in the context where it is generally used to indicate that an item, term, etc. may be either X, Y, Z, or any combination thereof (e.g., X, Y, Z), unless specifically stated otherwise. Thus, such disjunctive language does not generally imply that a particular embodiment requires that each of at least one of X, at least one of Y, or at least one of Z, respectively, be present.
- a processor configured to perform the following A, B, and C may include a first processor configured to perform A and a second processor configured to perform B and C.
- the term “horizontal” as used herein is defined as a plane parallel to the plane or surface of the floor of the area in which the described system is used or the plane in which the described method is performed, regardless of its orientation.
- the term “floor” may be interchanged with the terms “ground” or “water surface”.
- the term “vertical” refers to a direction perpendicular to a defined horizontal line. Terms such as “upper”, “lower”, “below”, “up”, “side”, “higher”, “lower”, “above”, “over”, “below” and the like are defined relative to the horizontal plane.
- connection includes a direct connection and/or a connection having an intermediate structure between the two components described.
- 1 Navigation support device 2 Display unit, 3 Radar, 4 AIS, 5 Camera, 6 GNSS receiver, 7 Gyrocompass, 8 ECDIS, 9 Wireless communication unit, 10 Ship maneuvering control unit, 20 Control unit, 11 Ship data acquisition unit (example of first acquisition unit), 12 Other ship data acquisition unit (example of second acquisition unit), 13 Collision risk calculation unit, 14 Route generation unit, 15 Route selection unit, 16 Intrusion degree calculation unit, 23 Risk section identification unit, 26 Blockage area identification unit Determination unit, 33 Collision index calculation unit, 36 Avoidance index calculation unit, 37 Avoidance judgment unit, 38 Route calculation unit, 39 Adoption judgment unit, 373 Close-range avoidance judgment unit, 376 Mid-range avoidance judgment unit, 43 Matching relationship judgment unit, 44 Holding/avoidance judgment unit, 46 Collision prevention route evaluation unit, 51 Risk value calculation unit, 63 Index calculation unit, 64 Route calculation unit, 65 Route classification unit, 66 Information calculation unit, 67 Display control unit, 68 Operation reception unit, 100 Shipboard system
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Ocean & Marine Engineering (AREA)
- Automation & Control Theory (AREA)
- Traffic Control Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025520440A JPWO2024236947A1 (https=) | 2023-05-12 | 2024-04-09 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023079450 | 2023-05-12 | ||
| JP2023-079450 | 2023-05-12 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024236947A1 true WO2024236947A1 (ja) | 2024-11-21 |
Family
ID=93519445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/014456 Ceased WO2024236947A1 (ja) | 2023-05-12 | 2024-04-09 | 航行支援装置、航行支援方法、及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2024236947A1 (https=) |
| WO (1) | WO2024236947A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62118281A (ja) * | 1985-11-18 | 1987-05-29 | Nippon Kokan Kk <Nkk> | 衝突危険回避支援装置 |
| JPH07234721A (ja) * | 1994-02-24 | 1995-09-05 | Hitachi Zosen Corp | 衝突回避方法 |
| JP2020027344A (ja) * | 2018-08-09 | 2020-02-20 | 株式会社日本海洋科学 | 避航支援装置 |
-
2024
- 2024-04-09 WO PCT/JP2024/014456 patent/WO2024236947A1/ja not_active Ceased
- 2024-04-09 JP JP2025520440A patent/JPWO2024236947A1/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62118281A (ja) * | 1985-11-18 | 1987-05-29 | Nippon Kokan Kk <Nkk> | 衝突危険回避支援装置 |
| JPH07234721A (ja) * | 1994-02-24 | 1995-09-05 | Hitachi Zosen Corp | 衝突回避方法 |
| JP2020027344A (ja) * | 2018-08-09 | 2020-02-20 | 株式会社日本海洋科学 | 避航支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024236947A1 (https=) | 2024-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11473914B2 (en) | Navigation device and method of creating route | |
| KR101719142B1 (ko) | 해양 내비게이션 장치 및 항로 제공 방법 | |
| KR20170117994A (ko) | 해양 내비게이션 장치 및 항로 제공 방법 | |
| US20210396525A1 (en) | Ship target object detection system, method of detecting ship target object and reliability estimating device | |
| US12542061B2 (en) | Ship monitoring device, ship monitoring method and a non-transitory computer-readable medium | |
| US20240270359A1 (en) | Ship monitoring device, ship monitoring method and non-transitory computer-readable recording medium | |
| KR101658133B1 (ko) | 선박의 충돌위험도 산출 시스템 | |
| US20260100132A1 (en) | Navigation assistance device, navigation assistance method, and non-transitory computer-readable recording medium | |
| WO2024236945A1 (ja) | 航行支援装置、航行支援方法、及びプログラム | |
| JP7724231B2 (ja) | 船舶監視システム、船舶監視方法、情報処理装置、及びプログラム | |
| JP7813780B2 (ja) | 船舶監視システム、船舶監視方法、情報処理装置、及びプログラム | |
| JP7781866B2 (ja) | 船舶監視システム、船舶監視方法、情報処理装置、及びプログラム | |
| JP7636957B2 (ja) | 操船支援システム、操船支援方法、情報処理装置、及びプログラム | |
| JP2024007541A (ja) | 航路計画システムおよび航路計画方法 | |
| US20250249989A1 (en) | Navigation assist system, navigation assist method, and program | |
| WO2024236947A1 (ja) | 航行支援装置、航行支援方法、及びプログラム | |
| WO2024236948A1 (ja) | 航行支援装置、航行支援方法、及びプログラム | |
| WO2024236950A1 (ja) | 航行支援装置、航行支援方法、及びプログラム | |
| WO2024236946A1 (ja) | 航行支援装置、航行支援方法、及びプログラム | |
| WO2024236949A1 (ja) | 航行支援装置、航行支援方法、及びプログラム | |
| JP6752253B2 (ja) | 避航支援装置 | |
| US20240109626A1 (en) | Ship monitoring system, ship monitoring method, and information processor | |
| JP7664079B2 (ja) | 船舶監視システム、船舶監視方法、情報処理装置、及びプログラム | |
| US12592152B2 (en) | Navigation planning system and navigation planning method | |
| US20250391276A1 (en) | Navigation assistance device, navigation assistance method, and recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24806901 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025520440 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025520440 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |