WO2024214161A1 - 技能評価装置及び技能評価方法 - Google Patents
技能評価装置及び技能評価方法 Download PDFInfo
- Publication number
- WO2024214161A1 WO2024214161A1 PCT/JP2023/014641 JP2023014641W WO2024214161A1 WO 2024214161 A1 WO2024214161 A1 WO 2024214161A1 JP 2023014641 W JP2023014641 W JP 2023014641W WO 2024214161 A1 WO2024214161 A1 WO 2024214161A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- important
- work
- data
- model
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




























Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
- G09B19/003—Repetitive work cycles; Sequence of movements
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B5/00—Electrically-operated educational appliances
- G09B5/02—Electrically-operated educational appliances with visual presentation of the material to be studied, e.g. using film strip
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
- G09B19/24—Use of tools
Definitions
- This disclosure relates to a skill assessment device and a skill assessment method.
- Patent Document 1 discloses a device including an acquisition unit and a level calculation unit.
- the acquisition unit acquires motion data indicating the motion of the work performed by the person to be evaluated from a sensor that detects the motion of the work performed by the person to be evaluated.
- the level calculation unit compares the motion data acquired by the acquisition unit with motion data indicating the motion of a model worker (hereinafter referred to as "model worker motion data"), and calculates the skill level of the worker based on the comparison result between the motion data acquired by the acquisition unit and the model worker motion data.
- Important evaluation items include, for example, evaluation items related to the person being evaluated's movements themselves and evaluation items related to the way the work is carried out. If there is a large difference between the person being evaluated's movements for the important evaluation items and the movements of the model worker for the important evaluation items, the skill level of the person being evaluated should be evaluated low. On the other hand, since there is a large degree of freedom in the way the hands or head are moved, the skill level of the person being evaluated should not be evaluated low simply because there is a large difference between the person being evaluated's movements and the movements of the model worker for movements other than the important evaluation items.
- the device disclosed in Patent Document 1 had a problem in that the level calculation unit compared the performance of the person being evaluated with the performance of an exemplary worker not only for the evaluation items but also for performance other than important evaluation items, which could result in a deterioration in the accuracy of calculating the skill level of the person being evaluated.
- the present disclosure has been made to solve the problems described above, and aims to provide a skills evaluation device that can suppress deterioration of skill evaluation results that accompanies the process of comparing the actions of the person being evaluated with the actions of a model worker for actions other than important evaluation items.
- the skill evaluation device includes a motion data acquisition unit that acquires motion data indicating the work motions from a sensor that detects the motions of the work being performed by the person whose work skills are to be evaluated, and an exemplary work analysis unit that identifies evaluation items that are important in evaluating the work of the person to be evaluated based on exemplary worker motion data that indicates the motions of an exemplary worker.
- the skill evaluation device also includes a skill evaluation unit that evaluates the skills of the person to be evaluated based on the motion data acquired by the motion data acquisition unit and the evaluation items identified by the exemplary work analysis unit.
- FIG. 1 is a configuration diagram showing a skill evaluation device 2 according to a first embodiment.
- 1 is a hardware configuration diagram showing hardware of a skill evaluation device 2 according to a first embodiment.
- FIG. FIG. 2 is a hardware configuration diagram of a computer in the case where the skill evaluation device 2 is realized by software, firmware, or the like.
- 4 is a flowchart showing a skill evaluation method which is a processing procedure of the skill evaluation device 2.
- 5A and 5B are explanatory diagrams each showing an example of task label data of a model worker.
- 1 is an explanatory diagram showing a difference Dn between the position coordinates of any part of the body in the nth frame and the position coordinates of any part of the body in the (n+1)th frame; FIG. FIG.
- FIG. 11 is an explanatory diagram showing an example of a score calculation system.
- 13 is an explanatory diagram showing the results of principal component analysis using the model worker motion data and the motion data of the person being evaluated in a two-dimensional feature space.
- FIG. 9A and 9B are explanatory diagrams showing an example of an exemplary way of proceeding with a task by an exemplary worker.
- FIG. 11 is an explanatory diagram showing an example of an exemplary work procedure performed by an exemplary worker.
- FIG. 13 is an explanatory diagram showing an example of work label data of an assessee. This is an explanatory diagram showing an example of how the person being evaluated proceeds with the work.
- FIG. 11 is an explanatory diagram showing an example of unnecessary element work.
- FIG. 11 is a configuration diagram showing a skill evaluation device 2 according to a second embodiment.
- FIG. 11 is a hardware configuration diagram showing hardware of a skill evaluation device 2 according to a second embodiment.
- 11 is an explanatory diagram showing an important section extraction process performed by an important section extraction unit 18;
- FIG. 13 is a flowchart showing a process of estimating the hand primarily performing the work.
- FIG. 11 is a configuration diagram showing a skill evaluation device 2 according to a third embodiment.
- FIG. 11 is a hardware configuration diagram showing hardware of a skill evaluation device 2 according to a third embodiment.
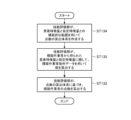
- 13 is a flowchart showing a process for identifying an evaluation item.
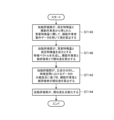
- 13 is a flowchart showing a process of extracting important feature amounts using model worker action data of a plurality of model workers.
- 13 is a flowchart showing the evaluation process regarding the behavior of the person being evaluated.
- 13 is a flowchart showing another evaluation process regarding the behavior of the person being evaluated.
- FIG. 13 is a configuration diagram showing a skill evaluation device 2 according to a fourth embodiment.
- FIG. 1 is a configuration diagram showing a skill evaluation device 2 according to the first embodiment.
- FIG. 2 is a hardware configuration diagram showing the hardware of the skill evaluation device 2 according to the first embodiment.
- a sensor 1 detects the motions of a task being performed by a model worker, and outputs model worker motion data indicating the motions of the model worker to a skill evaluation device 2 .
- the sensor 1 detects the work movements being performed by the person whose work skills are being evaluated, and outputs movement data indicating the movements of the person being evaluated to the skill evaluation device 2.
- the skill evaluation device 2 evaluates the skill of the person to be evaluated based on the motion data of the person to be evaluated output from the sensor 1 and the model worker motion data output from the sensor 1 .
- the motion data acquisition unit 11 acquires not only the motion data of the assessee but also the motion data of the model worker from the sensor 1. However, this is merely an example, and when the model worker motion data is stored in the data storage unit 13, the motion data acquisition unit 11 may acquire only the motion data of the assessee from the sensor 1 without acquiring the model worker motion data.
- the motion data of the assessee acquired by the motion data acquisition unit 11 indicates the motions of each of a plurality of tasks (hereinafter referred to as "elementary tasks") included in the maintenance work, which is the work performed by the assessee.
- the model worker motion data acquired by the motion data acquisition unit 11 indicates the motions of each of a plurality of elemental tasks included in the maintenance work, which is performed by the model worker.
- the motion data of the assessee acquired by the motion data acquisition unit 11 may indicate the motions of one elemental task.
- the model worker motion data acquired by the motion data acquisition unit 11 may indicate the motions of one elemental task.
- an example is described in which the skills of the assessee are evaluated for the maintenance work of adjusting a certain screw among a plurality of screws.
- the work for evaluating the skills of the assessee is not limited to the maintenance work of adjusting a screw, but may be the maintenance work of parts other than screws.
- the work for evaluating the skills of the assessee is not limited to maintenance work, but may be, for example, assembly work on a production line, inspection work, manual work such as traditional crafts, or daily work.
- the working label acquisition unit 12 is realized by, for example, a working label acquisition circuit 22 shown in FIG.
- the task label acquisition unit 12 acquires task label data for distinguishing between the actions of a plurality of element tasks, and outputs the task label data to the data storage unit 13 .
- the task label data includes data that distinguishes between the actions of a plurality of element tasks performed by a model worker and data that distinguishes between the actions of a plurality of element tasks performed by an assessee.
- the task label acquisition unit 12 acquires both types of task label data.
- the data storage unit 13 is realized by, for example, a data storage circuit 23 shown in FIG.
- the data storage unit 13 acquires the model worker motion data and the motion data of the person being evaluated from the motion data acquisition unit 11, and stores the model worker motion data and the motion data of the person being evaluated.
- the data storage unit 13 acquires the work label data of the model worker and the work label data of the person being evaluated from the work label acquisition unit 12, and stores each of the work label data. Furthermore, the data storage unit 13 stores the results of skill evaluation by the skill evaluation unit 16 .
- the important section extraction unit 14 is realized by, for example, an important section extraction circuit 24 shown in FIG.
- the important section extraction unit 14 acquires, from the data storage unit 13, the model worker action data, the assessee action data, the model worker task label data, and the assessee task label data.
- the important interval extraction unit 14 acquires the time interval during which each element task indicated by the model worker action data was performed, based on the task label data of the model worker. Then, the important section extraction unit 14 extracts model worker motion data of a section that is important in terms of work from the model worker motion data based on the change over time in the model worker motion data.
- the important section extraction unit 14 extracts model worker motion data of an important section for each element task from the model worker motion data indicating the motion of each element task based on the temporal change in the motion of each element task indicated by the model worker motion data. More specifically, the important section extraction unit 14 extracts model worker motion data of a section in which the change is equal to or smaller than a threshold as the model worker motion data of an important section for the element task. The important section extraction unit 14 outputs model worker action data for important sections in each element work to the model work analysis unit 15 .
- the important interval extraction unit 14 acquires the time interval during which each element task indicated by the motion data of the assessee was performed, based on the task label data of the assessee. Then, the important section extraction unit 14 extracts movement data of sections that are important for the work from the movement data of the person being evaluated based on the changes in the movement data over time. Specifically, the important section extraction unit 14 extracts movement data of sections important for each element task from the movement data showing the movements of each element task based on the temporal change in the movement of each element task shown in the movement data of the assessee. More specifically, the important section extraction unit 14 extracts movement data of sections where the change is equal to or less than a threshold as the movement data of sections important for the element task. The important section extraction unit 14 outputs the motion data of the important sections in each element work to the skill evaluation unit 16 .
- the important section extraction unit 14 extracts model worker motion data for sections where the change is equal to or less than a threshold as model worker motion data for sections that are important for elemental work, and extracts motion data for sections where the change is equal to or less than a threshold as motion data for the assessee for sections that are important for elemental work.
- model worker motion data for sections that are important for elemental work is not limited to model worker motion data for sections where the change is equal to or less than a threshold
- the assessee motion data for sections that are important for elemental work is not limited to motion data for sections where the change is equal to or less than a threshold.
- the model worker action data for a critical section of the task may be the model worker action data for a section where the change is above a threshold.
- the threshold value used to extract model worker action data, etc. in a section where the change is equal to or less than the threshold value is different from the threshold value used to extract model worker action data, etc. in a section where the change is equal to or more than the threshold value.
- the model work analysis unit 15 is realized by, for example, a model work analysis circuit 25 shown in FIG.
- the model task analysis unit 15 acquires model worker action data of an important task section from the important section extraction unit 14 .
- the model work analysis unit 15 identifies evaluation items that are important in evaluating the work of the person being evaluated, based on the model worker action data.
- the evaluation items that are important in evaluating the work of the person being evaluated include the meaning of important evaluation viewpoints in evaluating the work of the person being evaluated.
- the model work analysis unit 15 outputs the important evaluation aspects to the skill evaluation unit 16 .
- the model work analysis unit 15 identifies important evaluation items in evaluating the work of the person being evaluated based on the model worker action data for important sections of the work acquired from the important section extraction unit 14.
- the model work analysis unit 15 may also identify important evaluation items in evaluating the work of the person being evaluated based on the model worker action data acquired from the data storage unit 13.
- the skill evaluation unit 16 is realized by, for example, a skill evaluation circuit 26 shown in FIG.
- the skill evaluation unit 16 acquires the movement data of the person being evaluated from the important section extraction unit 14 and acquires important evaluation items from the model work analysis unit 15.
- the skill evaluation unit 16 evaluates the skills of the person to be evaluated based on the motion data and the evaluation items.
- the skill evaluation unit 16 outputs the skill evaluation results to both the evaluation result presentation unit 17 and the data storage unit 13 .
- the skill evaluation unit 16 evaluates the skills of the person being evaluated based on the movement data acquired from the important section extraction unit 14 and the evaluation items acquired from the model work analysis unit 15. However, this is merely one example, and the skill evaluation unit 16 may also evaluate the skills of the person being evaluated based on the movement data and evaluation items acquired from the data storage unit 13.
- the evaluation result presenting unit 17 is realized by, for example, an evaluation result presenting circuit 27 shown in FIG.
- the evaluation result presentation unit 17 acquires the skill evaluation result from the skill evaluation unit 16 .
- the evaluation result presentation unit 17 presents the result of the skill evaluation made by the skill evaluation unit 16 .
- the evaluation result presenting unit 17 displays the skill evaluation result by the skill evaluation unit 16 on, for example, an LCD (Liquid Crystal Display).
- each of the components of the skill evaluation device 2 is realized by dedicated hardware as shown in FIG. 2.
- the skill evaluation device 2 is realized by the action data acquisition circuit 21, the task label acquisition circuit 22, the data storage circuit 23, the important section extraction circuit 24, the model task analysis circuit 25, the skill evaluation circuit 26, and the evaluation result presentation circuit 27.
- the data storage circuit 23 may be, for example, a non-volatile or volatile semiconductor memory such as a RAM (Random Access Memory), a ROM (Read Only Memory), a flash memory, an EPROM (Erasable Programmable Read Only Memory), an EEPROM (Electrically Erasable Programmable Read Only Memory), a magnetic disk, a flexible disk, an optical disk, a compact disk, a mini disk, or a DVD (Digital Versatile Disc).
- a non-volatile or volatile semiconductor memory such as a RAM (Random Access Memory), a ROM (Read Only Memory), a flash memory, an EPROM (Erasable Programmable Read Only Memory), an EEPROM (Electrically Erasable Programmable Read Only Memory), a magnetic disk, a flexible disk, an optical disk, a compact disk, a mini disk, or a DVD (Digital Versatile Disc).
- each of the action data acquisition circuit 21, the task label acquisition circuit 22, the important section extraction circuit 24, the model task analysis circuit 25, the skill evaluation circuit 26 and the evaluation result presentation circuit 27 corresponds to, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field-Programmable Gate Array), or a combination of these.
- the components of the skill evaluation device 2 are not limited to those realized by dedicated hardware, and the skill evaluation device 2 may be realized by software, firmware, or a combination of software and firmware.
- the software or firmware is stored as a program in the memory of a computer.
- the computer means hardware that executes the program, and includes, for example, a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), a central processing unit, a processing unit, an arithmetic unit, a microprocessor, a microcomputer, a processor, or a DSP (Digital Signal Processor).
- FIG. 3 is a hardware configuration diagram of a computer in the case where the skill evaluation device 2 is realized by software, firmware, or the like.
- the data storage unit 13 is configured on a computer's memory 31.
- Programs for causing a computer to execute the respective processing procedures of the movement data acquisition unit 11, the activity label acquisition unit 12, the important section extraction unit 14, the model activity analysis unit 15, the skill evaluation unit 16, and the evaluation result presentation unit 17 are stored in the memory 31.
- a processor 32 of the computer executes the programs stored in the memory 31.
- FIG. 2 shows an example in which each of the components of the skill evaluation device 2 is realized by dedicated hardware
- FIG. 3 shows an example in which the skill evaluation device 2 is realized by software or firmware, etc.
- this is merely one example, and some of the components in the skill evaluation device 2 may be realized by dedicated hardware, and the remaining components may be realized by software or firmware, etc.
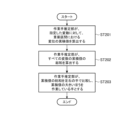
- FIG. 4 is a flowchart showing a skill evaluation method which is a processing procedure of the skill evaluation device 2.
- the following describes the maintenance work of adjusting screws as an example. There are multiple screws, and if the wrong screw is adjusted, the work will require rework.
- the motion data acquisition unit 11 acquires the model worker motion data of the model worker and the motion data of the assessee from the motion data DB.
- the motion data to be acquired is for one task or for multiple past tasks.
- the model worker motion data is data on the motion of the model worker, and is data obtained as time-series data of the position coordinates of each part of the model worker's body (each joint of the fingers, elbows, arms, legs, etc., head, etc.).
- the motion data is data on the motion of the person being evaluated, and is data obtained as time-series data of the position coordinates of each part of the person being evaluated.
- the motion data is acquired by a device that detects the motion of the model worker, etc., such as a camera, a speed sensor, a magnetic sensor, an infrared sensor, or a human presence sensor, and is stored in a motion data DB via a communication device.
- the data can be acquired from a sensor attached to the body, a sensor installed on the equipment to be worked on or the tool to be used, an image or video captured by a camera, etc.
- the movement data etc. may be obtained by directly communicating with a photographing device such as a sensor or a camera, or by a method in which a separate device such as a personal computer obtains data in real time and stores the obtained data in the movement data DB of the task evaluation device using a recording medium such as a DVD.
- the method of obtaining the movement data is not limited to the above and is arbitrary. In the first analysis, one model worker is selected, and model worker motion data of the model worker is obtained for multiple tasks.
- the working label acquisition unit 12 acquires working label data to be used for analysis.
- An example of work label data for one maintenance work is shown in FIG. 5A.
- the "label” distinguishes each element work. In the example of Fig. 5A, it is Japanese text, but numbers can be used as the work ID, or the alphabetical name of the element work, etc., and it is arbitrary.
- the "start frame” and “end frame” are the frame at the start time and the frame at the end time of each element task, respectively.
- the unit is the frame, but since the task label data is data that associates which element task was performed in which time period with the action data (time-series data), the unit may also be time. In this case, it would be the start time and end time.
- the unit of time is arbitrary. As shown in FIG. 5A, some types of element work are performed multiple times in one maintenance operation. For example, if the model worker gives some kind of signal when each elemental work is started and when each elemental work is completed, an external device (not shown) can generate work label data based on the signal from the model worker. Here, the external device generates the task label data based on a signal from the model worker. However, this is merely an example, and the external device, etc. may generate the task label data by, for example, analyzing the model action detected by the sensor 1. Specifically, the external device, etc.
- the external device, etc. may generate the task label data by estimating the correspondence between each section and the element task using deep learning.
- a clustering method such as a state transition probability model, a Bayesian model, a Markov model, a hidden Markov model, a multi-class discrimination model, a kernel function, or dynamic time warping.
- the external device, etc. may generate the task label data by estimating the correspondence between each section and the element task using deep learning.
- the important section extraction unit 14 receives model worker action data for multiple trials of a model worker from the action data acquisition unit 11, and receives corresponding action label data for multiple trials from the action label acquisition unit 12. The important section extraction unit 14 then extracts sections where posture is determined (important sections) from the time sections determined by the start and end frames of the action label data for each elemental task, excluding the time sections during which the body (hands, head, feet, etc.) is moving until the body is in a fixed position, as particularly important sections in terms of the task.
- posture important sections
- the processing flow of the important section extraction unit 14 is shown in Figure 18.
- the procedure in Figure 18 is the processing flow for each element work (corresponding to one row of the work label data in Figure 5A).
- the target element work is performed multiple times in one maintenance work, such as "Adjusting bolt B" in Figure 5A, the important section is extracted for each time using the procedure in Figure 18.
- a difference from the previous frame is calculated using any variable. Since the target work in the first embodiment is a maintenance work for adjusting screws, for example, the position coordinates of the palm of the hand are used from among the coordinates of each part of the model worker motion data, and the difference from the position coordinates of the model worker's hand in the previous frame is calculated.
- a window having a predetermined width is shifted from the first frame, and the position of the first consecutive frame whose result calculated in ST101 is less than the threshold for a predetermined number of frames is set as the start position of the important section. A specific example is shown in Fig. 6. Fig.
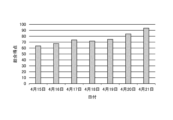
- FIG. 6 shows the result of calculating the displacement of the palm position coordinates in the previous frame in ST101 for the time section related to the label "Adjusting Bolt B" in the work label data shown in Fig. 5A.
- the threshold is 0.002 and the predetermined number of frames is 2 frames
- the window is shifted by one frame at a time with a window size of 2 frames from the start frame 188 of the work label data, and a position where all two frames in the window are below the threshold is searched for.
- a and b are each window sizes of 2 frames.
- the start position of the important section is determined to be 192 frames.
- the window is shifted one frame at a time from the last frame toward the first frame, and the result calculated in ST101 is determined to be a predetermined number of frames less than the threshold, and the last consecutive frame is set as the end position of the important section.
- This is processing in which the search direction is reversed compared to ST102, and the search method is the same as in ST101.
- the search direction is reversed compared to ST102, and the search method is the same as in ST101.
- the first window the window from frame 204 to frame 206
- all values within the window are less than the threshold, so the end position of the important section is determined to be frame 206.
- the model work analysis unit 15 receives model worker action data for multiple maintenance work tasks from the action data acquisition unit 11 via the data storage unit 13, receives work label data for multiple maintenance work tasks corresponding to the model worker action data from the work label acquisition unit 12 via the data storage unit 13, and receives important sections calculated for each time section from the important section extraction unit 14. The model work analysis unit 15 then analyzes the multiple maintenance work tasks of the model worker and extracts evaluation items that are important points in the work.
- the model work analysis unit 15 receives action data for multiple maintenance work tasks from the action data acquisition unit 11, and receives work label data for multiple corresponding maintenance work tasks from the work label acquisition unit 12.
- the model work analysis unit 15 extracts features with little variation over multiple trials, and extracts features related to important points in the work (hereinafter referred to as important features).
- a method of extraction from model worker action data and task label data of one model worker b.
- a method of extraction from model worker action data and task label data of multiple model workers The user inputs which of method a or b to use. This can be done by writing it in a configuration file or by inputting it from a keyboard, etc. The method is not limited to these.
- a process flow of the method of extracting important feature amounts using the model worker action data of one model worker in the above item a is shown in FIG.
- the model worker action data and task label data of the multiple maintenance tasks acquired are used to calculate feature values for important sections for each trial of the target element task (each row of task label data).
- feature value statistics (maximum, minimum, etc.) for position, speed, etc. are calculated using any variable, but the feature value is not limited to this and any feature value can be used.
- "Each trial of the target element task" corresponds to each row in the task label data of the target element task. For example, when using the task label data of Fig.
- the feature amount is calculated for each of the first adjustment (from frame 188 to frame 206) and the second adjustment (from frame 325 to frame 405) (each trial) for the important sections extracted by the important section extraction unit 14.
- the important section of the target trial is targeted, and the speed is calculated based on the difference from the previous frame using the palm position coordinates, and the maximum and minimum speed values in the important section are calculated as features.
- the standard deviation for each feature amount calculated in ST111 is calculated for multiple trials. For example, when using the task label data of Figure 5A, if the target element task is "Adjusting bolt B," features are obtained from a total of two trial data sets: features calculated from the important section of the first adjustment (from frames 188 to 206) and features calculated from the important section of the second adjustment (frames 325 to 405) (sets of features are obtained for two trials). Similarly, when the work label data of another maintenance work is as shown in Fig.
- the feature is calculated from a total of two trial data sets, that is, the feature calculated from the important section of the first adjustment (from frame 174 to frame 198) and the feature calculated from the important section of the second adjustment (frame 327 to 386).
- the work label data of two maintenance works Figs. 5A and 5B
- feature values for four trials are obtained for "adjustment of bolt B”.
- ST113 feature quantities with little variation are extracted from multiple trials and are regarded as important feature quantities that are important evaluation items for the work.
- feature quantities with standard deviations calculated in ST112 that are equal to or smaller than a threshold value are extracted.
- the threshold value is defined in a setting file or is input by a mouse, keyboard, etc. Other methods are also possible.
- ST114 it is determined whether there is an important feature.
- the standard deviation is used, if there is no feature whose standard deviation is equal to or smaller than the threshold, there is no important feature, and the result is that there is no important evaluation item in the work (ST116).
- an exemplary range of the important feature is extracted from the model worker motion data of the model worker. For example, if the important feature is the "maximum palm speed", the possible range of the "maximum palm speed" (minimum to maximum) is obtained from the model worker motion data of the model worker used in the analysis, and this range is set as the exemplary range of the important feature. Exemplary ranges are extracted based on each important feature, the number of times equal to the number of important features. In this manner, important performance evaluation items are obtained from the analysis of the exemplary worker.
- the method of determination is not limited to this method.
- the number of features whose standard deviation is below the threshold may be found, and if the number is small (below the threshold), it may be determined that there is no important feature. Also, a method that does not use the standard deviation may be used.
- each process motion data acquisition unit 11, activity label acquisition unit 12, important section extraction unit 14 preceding the model activity analysis unit 15 is carried out for a plurality of model workers.
- the content of the process is the same as that described above.
- the model workers used for analysis are defined in a settings file, or input by the user via a keyboard, mouse, etc. Other methods are also possible.
- ST162 and ST163 are the same operations as ST111 and ST112 in FIG.
- feature quantities with little variation are extracted from multiple trials. This is the same as the operation in ST113 in Fig. 19.
- feature quantities with standard deviations equal to or smaller than a threshold value are extracted as feature quantities with little variation from multiple trials.
- the extraction results are treated as important features in ST113 of FIG. 19, in the case of FIG. 20 where data of multiple model workers is used, the extraction results of features with little variance are not treated as important features in the processing stage of ST164, which is different.
- ST162 to ST164 are performed on a plurality of model workers, and among the feature amounts extracted in ST164, feature amounts common to the plurality of model workers are determined as important feature amounts.
- the processes and operations in ST166, ST167, and ST168 are similar to those in ST114, ST115, and ST116 in FIG.
- the results of extraction of important features and, when important features exist, the results of each feature and its exemplary range are stored in the data storage unit 13 and are also passed to the skill evaluation unit 16 .
- the model work analysis unit 15 uses the task label data of the model worker to analyze the overall work progress, and defines a work progress that does not leave any required elemental tasks unperformed and does not require rework as a model work progress.
- the process flow is shown in Figure 21.
- task label data of the analysis subject is acquired.
- task label data of the two maintenance tasks shown in Figures 5A and 5B is acquired.
- the type of label is extracted based on the value in the "label" column of the working label data.
- four types of tasks are extracted: "Check,”"Loosen the nuts,”"Adjust bolt B,” and "Tighten the nuts.”
- FIG. 9A an example in which an exemplary procedure is defined based on the order of appearance of the labels is shown in FIG. 9A. This means that the tasks should be carried out in the order listed from top to bottom, and [ ] group together elemental tasks that are carried out as a set.
- [Adjust bolt B, Check] means that checking is carried out after adjusting bolt B
- [Adjust bolt B, Check] *2 means that checking is carried out after adjusting bolt B twice.
- Fig. 9A shows the procedure for work on one type of bolt, bolt B, but in the case of two types of bolts, bolt A and bolt B, and the work is to adjust bolt A before adjusting bolt B, an exemplary procedure for work is defined in a similar manner by analyzing the work label data, as shown in Fig. 9B. This means that the set of "adjusting and checking the bolt” is repeated twice for both bolt A and bolt B.
- the definition of how to proceed with the work does not have to be in the format of Figures 9A and 9B. It may be defined in another format as long as it is clear what element tasks are required and their order of execution, and if element tasks are always performed in sets, the sets are clear, and if there are element tasks or sets that are performed repeatedly, the number of repetitions is clear.
- 9A and 9B show an example in which the number of repetitions of "adjusting and checking bolt A (or B)" is two, but if the number of repetitions has a range, such as N or more and M or less, it is defined as shown in FIG. 10.
- the generated definition of how to proceed with the work is stored in the data storage unit 13 and is also passed to the skill evaluation unit 16 .
- the skill evaluation unit 16 quantitatively evaluates the skills of the person being evaluated using the analysis results of the movements extracted by the model work analysis unit 15 and the model work progression methods extracted by the model work analysis unit 15. A plurality of maintenance operations may be evaluated collectively, or only one maintenance operation may be evaluated. The evaluation will be based on a comprehensive assessment of both the movement and the way the work is carried out.
- FIG. 22 shows a process for calculating the score using an exemplary range of important features for method a.
- a score calculation system is created using exemplary ranges of important features, an example of which is shown in FIG. 7 shows an example of calculating the score by roughly classifying the levels into three stages when one of the important features extracted by the model work analysis unit 15 is "important feature A" and the exemplary range extracted by the model work analysis unit 15 is between v1 and v2.
- the closer to the exemplary range of important feature A, the closer to the exemplary movement, and the scores are set to levels 1, 2, and 3 in descending order of the scores.
- level 1 is an exemplary range and is therefore assigned 100 points
- level 2 is close to the exemplary range and is therefore assigned 80 points
- a decay function is used to calculate the score so that the score decreases the further away from the exemplary range.
- the width ⁇ can be set to any value.
- the method of calculating the score is not limited to the above method. For example, if the range of the important feature is an exemplary range, it is passed (100 points), and if it is outside the range, it is failed (0 points). Alternatively, for a range other than the exemplary range of the important feature amount from v1 to v2, the score may be calculated so that the score decreases as the range moves away from the exemplary range. Also, the range other than the exemplary range of the important feature amount from v1 to v2 may be divided into four ranges, and a total of five-level evaluation may be performed. The method of calculating the score and the level division may be other than those described above.
- values are calculated for the important feature amounts obtained from the model worker using the model worker's motion data.
- the motion data acquisition unit 11 acquires the model worker's motion data
- the activity label acquisition unit 12 acquires activity label data corresponding to the model worker's motion data
- the important interval extraction unit 14 extracts important intervals in the task.
- the specific operations and processing contents are the same as those described above.
- the value of each important feature amount in the important interval is calculated for each trial of the element task. For example, if there are two important features, the maximum value of palm velocity and the minimum value of palm velocity, the values of these two features in the important section are calculated using the model worker action data of the model worker.
- the score of the model worker is calculated based on the score calculation system created in ST131. For example, when the value of the important characteristic amount A calculated from the model worker action data of the model worker corresponds to level 1 in FIG. 7 (v1 or more and v2 or less), the score is 100 points.
- a principal component analysis is performed using the calculation results of the important feature amounts in the data of the model worker and the assessee, and the similarity between the model worker and the assessee is calculated based on the degree of separation of the data in the feature space.
- Fig. 8 shows an example in which the calculation results of the important features for the exemplary worker and the assessee are standardized and subjected to principal component analysis, and the first principal component is plotted on the x-axis and the second principal component on the y-axis.
- the circle markers are the results for the exemplary worker and the square markers are the results for the assessee. Each represents data from four trials.
- the calculation results of the important features are obtained from the exemplary work analysis unit 15.
- the assessee is obtained in ST141.
- the method of calculating the degree of separation of data in a feature space with the first principal component as the x-axis and the second principal component as the y-axis may be a method based on the distance between the center of gravity of the multiple data of the model worker and the center of gravity of the multiple data of the assessee, a method based on the point of minimum distance between the data of the model worker and the data of the assessee, a method based on the point of maximum distance between the data of the model worker and the data of the assessee, or a method combining two or more of these methods.
- the similarity between the model worker and the assessee is calculated based on the degree of separation of data in the feature space by a method in which the similarity is set to 1.0 when the distance is equal to or less than a threshold, and in other distances, the similarity is calculated to decrease as the distance increases, or a method in which no threshold is set and the similarity is calculated to decrease as the distance increases according to the distance.
- a score is calculated based on the similarity calculated in ST142 and ST143.
- the similarity in ST142 and ST143 can be calculated by calculating the average score, with the full score of the similarity based on ST142 being M points and the full score of the similarity based on ST143 being N points.
- Another method is to calculate the average of the similarity calculated in ST142 and the similarity calculated in ST143, and calculate the score based on the full score of a similarity of 1.0.
- the exemplary work procedure is shown in Fig. 9A and is defined from the work label data of the exemplary worker in Fig. 5A.
- the exemplary work procedure is to first check, then loosen the nut, perform the set of "adjust and check bolt B" twice, and then tighten the nut.
- FIG. 24 An example of the operation for evaluating an evaluatee who performed a task using the task label data progression shown in Fig. 11 will be described below.
- the processing flow is shown in Fig. 24.
- the work progress is extracted using the work label data of the person being evaluated.
- the work progress shown in Fig. 12 is obtained by the same process as that for defining the work progress of the model worker in the model work analysis unit 15 as described above.
- the work process of the model worker and the person being evaluated are compared.
- the presence or absence of unperformed work is checked, and if there is unperformed work, it is extracted.
- unperformed work if there is an elemental work defined in the work procedure of the model worker that is not defined in the work procedure of the assessee, the necessary elemental work is deemed to have been unperformed.
- a range of times is defined in the work procedure of the model worker, and the number of times is less than the range, it is also deemed to have unperformed work.
- the definition shown in Fig. 9A is obtained by acquiring the work progress of the model worker from the model work analysis unit 15. By comparing the work progress of the model worker (Fig. 9A) with the work progress of the assessee (Fig. 12), the first element work "check" is extracted as not being performed.
- the degree of rework is calculated based on the results of comparing the work methods of the model worker and the assessee.
- a method of extracting rework if an elemental work not defined in the model worker's work method is included, it is deemed that an unnecessary elemental work is being performed, and it is deemed a rework. Also, if a range of times is defined in the model worker's work method, and the assessee's work method involves performing the work more than that number of times, it is deemed a rework because the assessee is not performing the work efficiently.
- the work progress of the model worker (FIG. 9A) with the work progress of the assessee (FIG. 12)
- unnecessary elemental work related to bolt A is extracted as rework, as shown in FIG. 13.
- the number of times for the set of "adjusting and checking bolt B" is greater than that of the model worker, so it is considered to be rework.
- the score for the movement and the score for the work progress are combined to produce a score.
- the score for the movement calculated in ST144 of Fig. 23 (hereinafter, score A) is obtained, and a total score is calculated by adding the score for the work progress calculated in ST155 of Fig. 24 (hereinafter, score B).
- the total score can be calculated by any method, such as averaging score A and score B, or weighting score A and score B and adding them together.
- the results of the evaluation of the person being evaluated are stored in the data storage unit 13 and are also passed to the evaluation result presentation unit 17 .
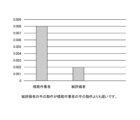
- the average value of the important feature can be visualized and output from the important feature extracted by the model work analysis unit 15, its exemplary range, and the range of the assessee's values.
- An example is shown in FIG. 17.
- the average value of the maximum palm speed over multiple trials is calculated and visualized.
- the difference in the graph is also output as text, but the presence or absence of text information is not important.
- the type of graph is not limited to the bar graph shown in FIG. 17.
- the skill evaluation device 2 is configured to include a motion data acquisition unit 11 that acquires motion data indicating the motions of the work from a sensor 1 that detects the motions of the work being performed by a person whose work skills are to be evaluated, and an exemplary work analysis unit 15 that identifies important evaluation items for evaluating the work of the person to be evaluated based on exemplary worker motion data indicating the motions of an exemplary worker.
- the skill evaluation device 2 also evaluates the skills of the person to be evaluated based on the motion data acquired by the motion data acquisition unit 11 and the evaluation items identified by the exemplary work analysis unit 15. Therefore, the skill evaluation device 2 can suppress deterioration of the skill evaluation results that accompanies the process of comparing the motions of the person to be evaluated with the motions of the exemplary worker for motions other than the important evaluation items.
- Embodiment 2 In the second embodiment, a skill evaluation device 2 is described in which the work is manual and the skill evaluation device 2 is equipped with a worker estimation unit 19 that estimates whether the hand used primarily by the person being evaluated is the left hand or the right hand.
- Fig. 25 is a configuration diagram showing a skill evaluation device 2 according to embodiment 2.
- the same reference numerals as in Fig. 1 indicate the same or corresponding parts, and detailed description thereof will be omitted.
- Fig. 26 is a hardware configuration diagram showing the hardware of the skill evaluation device 2 according to embodiment 2.
- the same reference numerals as in Fig. 2 denote the same or corresponding parts, and detailed description thereof will be omitted.
- FIG. 25 is a configuration diagram showing a skill evaluation device 2 according to embodiment 2.
- the same reference numerals as in Fig. 1 indicate the same or corresponding parts, and detailed description thereof will be omitted.
- Fig. 26 is a hardware configuration diagram showing the hardware of the skill evaluation device 2 according to embodiment 2.
- the same reference numerals as in Fig. 2 denote the same or corresponding parts, and detailed description thereof will be omitted.
- the sensor 3 detects the movements of the left and right hands of a model worker, and outputs model worker movement data indicative of the left hand movement (hereinafter referred to as “left hand model worker movement data”) and model worker movement data indicative of the right hand movement (hereinafter referred to as “right hand model worker movement data”) to the skill evaluation device 2.
- the sensor 3 detects the movements of the left and right hands of the person being evaluated, and outputs movement data indicating the left hand movement (hereinafter referred to as "left hand movement data”) and movement data indicating the right hand movement (hereinafter referred to as "right hand movement data”) to the skill evaluation device 2.
- the skill evaluation device 2 shown in Figure 25 includes an action data acquisition unit 11, an activity label acquisition unit 12, a data storage unit 13, an important section extraction unit 18, an operator estimation unit 19, a model activity analysis unit 15, a skill evaluation unit 16, and an evaluation result presentation unit 17.
- the movement data acquisition unit 11 acquires left hand model worker movement data and right hand model worker movement data from the sensor 3, and outputs the left hand model worker movement data and right hand model worker movement data to the data storage unit 13.
- the movement data acquisition unit 11 acquires left hand movement data and right hand movement data from the sensor 3 , and outputs the left hand movement data and right hand movement data to the data storage unit 13 .
- the movement data acquiring unit 11 acquires each of left hand model worker movement data and right hand model worker movement data from the sensor 3.
- the movement data acquiring unit 11 may acquire left hand model worker movement data from a sensor (not shown) that detects the movement of the left hand of the model worker, and may acquire right hand model worker movement data from a sensor (not shown) that detects the movement of the right hand of the model worker.
- the motion data acquisition unit 11 acquires each of the left hand motion data and the right hand motion data from the sensor 3.
- the motion data acquisition unit 11 may acquire left hand motion data from a sensor (not shown) that detects the motion of the left hand of the person being evaluated, and may acquire right hand motion data from a sensor (not shown) that detects the motion of the right hand of the person being evaluated.
- the important section extraction unit 18 is realized by, for example, an important section extraction circuit 28 shown in FIG.
- the important section extraction unit 18 acquires the task label data of the model worker and the task label data of the person being evaluated from the data storage unit 13 .
- the important section extraction unit 18 acquires the left hand model worker motion data and the right hand model worker motion data of the model worker from the data storage unit 13 .
- the important section extraction unit 18 acquires left hand movement data and right hand movement data of the person being evaluated from the data storage unit 13.
- the important section extraction unit 18 extracts left hand model worker important section movement data, which is left hand model worker movement data for sections that are important for each element work, from the left hand model worker movement data based on the temporal changes in the movements of each element work indicated by the left hand model worker movement data.
- the process of extracting left-hand model worker important section action data for an important section by the important section extraction unit 18 is similar to the process of extracting model worker action data for an important section by the important section extraction unit 14 shown in FIG.
- the important section extraction unit 18 extracts right hand model worker important section movement data, which is model worker movement data for sections that are important for each element work, from the right hand model worker movement data, based on the temporal change in the model movement of each element work indicated by the right hand model worker movement data.
- the important section extraction unit 18 outputs each of the left hand model worker important section motion data and the right hand model worker important section motion data to the worker estimation unit 19.
- the important interval extraction unit 18 extracts left hand important interval movement data, which is left hand movement data for intervals that are important for each element task, from the left hand movement data based on the temporal changes in the movement of each element task indicated by the left hand movement data.
- the important section extraction unit 18 extracts right hand important section movement data, which is right hand movement data for sections that are important for each element work, from the right hand movement data based on the temporal changes in the movement of each element work indicated by the right hand movement data.
- the important section extraction unit 18 outputs each of the left hand important section movement data and the right hand important section movement data to the working hand estimation unit 19.
- the worker estimation unit 19 estimates that the model worker's main working hand is the left hand, it outputs left-hand model worker important section action data to the model work analysis unit 15, and if it estimates that the model worker's main working hand is the right hand, it outputs right-hand model worker important section action data to the model work analysis unit 15. In addition, the worker estimation unit 19 estimates whether the hand used primarily by the person being evaluated is the left hand or the right hand, based on the left hand important section motion data and the right hand important section motion data.
- the worker estimation unit 19 estimates that the hand used primarily by the person being evaluated is the left hand, it outputs left hand important section movement data to the skill evaluation unit 16, and if it estimates that the hand used primarily by the person being evaluated is the right hand, it outputs right hand important section movement data to the skill evaluation unit 16.
- each of the components of the skill evaluation device 2 is realized by dedicated hardware as shown in FIG. 26. That is, it is assumed that the skill evaluation device 2 is realized by the action data acquisition circuit 21, the task label acquisition circuit 22, the data storage circuit 23, the important section extraction circuit 28, the worker estimation circuit 29, the model task analysis circuit 25, the skill evaluation circuit 26, and the evaluation result presentation circuit 27.
- Each of the motion data acquisition circuit 21, task label acquisition circuit 22, data storage circuit 23, important section extraction circuit 28, worker estimation circuit 29, model task analysis circuit 25, skill evaluation circuit 26, and evaluation result presentation circuit 27 may be, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination of these.
- the components of the skill evaluation device 2 are not limited to those realized by dedicated hardware, and the skill evaluation device 2 may be realized by software, firmware, or a combination of software and firmware.
- the data storage unit 13 is configured on a memory 31 shown in Fig. 3.
- Programs for causing a computer to execute the respective processing procedures of the motion data acquisition unit 11, the task label acquisition unit 12, the important section extraction unit 18, the worker estimation unit 19, the model task analysis unit 15, the skill evaluation unit 16, and the evaluation result presentation unit 17 are stored in the memory 31.
- a processor 32 shown in Fig. 3 executes the programs stored in the memory 31.
- FIG. 26 shows an example in which each of the components of the skill evaluation device 2 is realized by dedicated hardware
- FIG. 3 shows an example in which the skill evaluation device 2 is realized by software or firmware, etc.
- this is merely one example, and some of the components in the skill evaluation device 2 may be realized by dedicated hardware, and the remaining components may be realized by software or firmware, etc.
- the important section extraction unit 18 extracts model worker action data of important sections in each element work from the model worker action data of the model worker, similarly to the important section extraction unit 14 shown in FIG. However, unlike the important section extraction unit 14 shown in Figure 1, the important section extraction unit 18 extracts left hand important section movement data, which is model worker movement data for sections that are important for each element task, from the model worker movement data of the left hand of the model worker. Furthermore, the important section extraction unit 18 extracts right hand important section motion data, which is model worker motion data for an important section in each element task, from the model worker motion data of the right hand of the model worker. The important section extraction unit 18 outputs each of the left hand important section movement data and the right hand important section movement data to the working hand estimation unit 19.
- left hand important section movement data which is model worker movement data for sections that are important for each element task
- right hand important section motion data which is model worker motion data for an important section in each element task
- FIG. 27 shows a specific example in which the important section extraction section 18 extracts important left hand section movement data and important right hand section movement data.
- FIG. 27 shows the result of calculating the displacement of the position coordinates of the left and right palms in the previous frame in ST101 for the time interval related to the label "Adjusting Bolt B" in the work label data shown in FIG. 5A.
- the threshold is 0.002 and the predetermined number of frames is 2
- the window size of 2 frames is shifted one frame at a time from the start frame 188 of the work label data, and a position where all two frames in the window are less than the threshold is searched for.
- a and b are window sizes of 2 frames each.
- the window is shifted one frame at a time from the last frame to the first frame, and the frame for which the result calculated in ST101 is less than the threshold is determined as the end position of the important section for a predetermined number of frames, and the last consecutive frame is determined as the end position of the important section.
- the worker hand estimation unit 19 uses the sections extracted by the important section extraction unit 18 to calculate features for each of the left and right hands, and estimates whether the hand used for each elemental task is the right hand or the left hand (for each time, if the same elemental task is performed multiple times).
- the working hand is the hand that is primarily moving, for example, when tightening a nut, it is the hand tightening the nut. When both hands are moved equally, both hands are included.
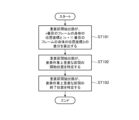
- FIG. 28 shows a process flow when the sum of accumulated values of displacement is used as the feature amount.
- the cumulative value of the displacement in the important section is calculated for the designated variable.
- the important section extracted by the important section extraction unit 18 is received, and for a specified variable, the absolute value of the difference between the position coordinates of the important section and the position coordinates of the previous frame is calculated, and then added over the entire important section to calculate a cumulative value.
- the variable may be one type, such as "palm,” or multiple variables, such as "palm” and "wrist.”
- the cumulative value of the palm displacement two types, right hand and left hand
- the cumulative value of the wrist displacement two types, right hand and left hand
- the sum of the accumulated values of all variables is calculated. If only one type of variable is used, the result will be the same as in ST201. If two variables, palm and wrist, are used in ST201, the accumulated value for the palm and the accumulated value for the wrist are added together to obtain the sum for the right hand. Similarly, the accumulated value for the palm and the accumulated value for the wrist are added together to obtain the sum for the left hand. In ST203, the sums of the accumulated values calculated in ST202 are compared between the left and right hands, and the hand with the larger accumulated value is regarded as the working hand. In the above example of operation, the sum of accumulated values is used as the feature amount. However, the feature amount is not limited to the sum of accumulated values, and any other feature amount can be used.
- the result of the worker estimation unit 19 is stored in the data storage unit 13 and is also passed to the model work analysis unit 15 .
- the model work analysis unit 15 acquires the model worker important section action data as model worker action data.
- the model work analysis unit 15 acquires each of the left hand model worker important section movement data and the right hand model worker important section movement data as model worker movement data.
- the model work analysis unit 15 identifies important evaluation items for evaluating the work of the person to be evaluated, based on the model worker motion data.
- model worker action data and task label data of the multiple maintenance tasks acquired are used to calculate features for important sections for each trial of the target task element (each row of task label data).
- features for important sections for each trial of the target task element each row of task label data.
- statistics maximum, minimum, etc.
- Each trial of the target element task corresponds to each row in the task label data of the target element task. For example, when using the task label data of Fig.
- the feature amount is calculated for each of the first adjustment (from frame 188 to frame 206) and the second adjustment (from frame 325 to frame 405) (each trial) for the important sections extracted by the important section extraction unit 14.
- the feature amount for example, when calculating the feature amount related to the palm speed, the speed is calculated based on the difference from the previous frame using the palm position coordinates for the important section of the target trial, and the maximum value, minimum value, etc. of the speed in the important section are calculated as the feature amount. Calculations are made for each of the left and right hands.
- the standard deviation for each feature amount calculated in ST111 is calculated for multiple trials. For example, when using the task label data of Figure 5A, if the target element task is "Adjusting bolt B," features are obtained from a total of two trial data sets: features calculated from the important section of the first adjustment (from frames 188 to 206) and features calculated from the important section of the second adjustment (frames 325 to 405) (sets of features are obtained for two trials). Similarly, when the work label data of another maintenance work is as shown in Fig.
- the feature is calculated from a total of two trial data sets, that is, the feature calculated from the important section of the first adjustment (from frame 174 to frame 198) and the feature calculated from the important section of the second adjustment (frame 327 to 386).
- the standard deviation for multiple trials is calculated using the results of the working hand estimated by the worker estimation unit 19, taking into consideration the working hand in each trial. For example, if the first adjustment in FIG. 5A and the first adjustment in FIG. 5B are estimated to be the right hand, and the second adjustment in FIG.
- the right hand data is used for the feature values obtained from the first adjustment in FIG. 5A and the first adjustment in FIG. 5B
- the left hand data is used for the feature values obtained from the second adjustment in FIG. 5A and the second adjustment in FIG. 5B, to calculate the standard deviation for four trials.
- the working hand is estimated to be the right hand by the worker estimation unit 19 for all trials (four times) in FIG. 5A and FIG. 5B
- the standard deviation is calculated using the feature values obtained from the right hand for all four trials. In this way, the working hand and the non-working hand are distinguished, and the standard deviation is calculated using the feature values related to the hand for each trial depending on which hand is to be analyzed.
- feature quantities with little variance are extracted from multiple trials and are considered to be important feature quantities that will be important evaluation items for the work.
- feature quantities with little variance feature quantities with standard deviations calculated in ST112 that are below a threshold value are extracted.
- the threshold value can be defined in a settings file or entered by input using a mouse, keyboard, etc. Other methods are also possible.
- ST114 it is determined whether there is an important feature.
- the standard deviation is used, if there is no feature whose standard deviation is equal to or smaller than the threshold, there is no important feature, and the result is that there is no important evaluation item in the work (ST116).
- an exemplary range of the important feature is extracted from the model worker motion data of the model worker. For example, if the important feature is the "maximum palm speed", the possible range of the "maximum palm speed" (minimum to maximum) is obtained from the model worker motion data of the model worker used in the analysis, and this range is set as the exemplary range of the important feature. Exemplary ranges are extracted based on each important feature, the number of which is equal to the number of important features.
- the above shows an example of how to extract important features from a working hand, but in a similar way, it is possible to extract features with little variation from a non-working hand by multiple trials, and extract important features. If there are important features, extract an exemplary range.
- the non-working hand even if it is not moving like the working hand, it may be holding down or supporting the object with the hand, and since this movement may have a work-related point, it is carried out in the same way.
- the method of determination is not limited to this method.
- the number of features whose standard deviation is below the threshold may be found, and if the number is small (below the threshold), it may be determined that there is no important feature. Also, a method that does not use the standard deviation may be used.
- the process of extracting important feature amounts using the model worker action data of a plurality of model workers in the model work analysis unit 15 is the same as that in the first embodiment. Moreover, in the model work analysis unit 15, the definition of the work progress is the same as in the first embodiment.
- the skill evaluation unit 16 acquires important evaluation items from the model work analysis unit 15 .
- the skill evaluation unit 16 acquires the important section movement data as movement data.
- the skill evaluation unit 16 acquires each of the left hand important zone movement data and the right hand important zone movement data as movement data.
- the skill evaluation unit 16 evaluates the skills of the person to be evaluated based on the model worker motion data for the evaluation item and the motion data for the evaluation item, as in the first embodiment.
- a score calculation system is created using the exemplary range of the important feature.
- the score is calculated by roughly dividing the levels into three stages. The closer to the exemplary range of important feature A, the closer to the exemplary movement, and the scores are set to level 1, level 2, and level 3 in descending order of scores.
- level 1 is an exemplary range and is therefore assigned a score of 100 points
- level 2 is close to the exemplary range and is therefore assigned a score of 80 points
- a decay function is used to calculate the score so that the score decreases as the range moves away from the exemplary range.
- the width ⁇ can be set to any value.
- the method of calculating the score is not limited to the above method. For example, if the range of the important feature is an exemplary range, it is passed (100 points), and if it is outside the range, it is failed (0 points). Alternatively, for a range other than the exemplary range of the important feature amount from v1 to v2, the score may be calculated so that the score decreases as the range moves away from the exemplary range. Also, the range other than the exemplary range of the important feature amount from v1 to v2 may be divided into four ranges, and a total of five-level evaluation may be performed. The method of calculating the score and the level division may be other than those described above.
- the score of the model worker is calculated based on the score calculation system created in ST131. For example, when the value of important feature A calculated from the model worker action data of the model worker corresponds to level 1 in Fig. 7 (v1 or more and v2 or less), the score is 100. The scores are calculated for the working hand and the non-working hand, and the average score is calculated.
- a principal component analysis is performed using the calculation results of the important feature amounts in the data of the model worker and the assessee, and the similarity between the model worker and the assessee is calculated based on the degree of separation of the data in the feature space.
- Fig. 8 shows an example in which the calculation results of the important features for the exemplary worker and the assessee are standardized and subjected to principal component analysis, and the first principal component is plotted on the x-axis and the second principal component on the y-axis.
- the circle markers are the results for the exemplary worker and the square markers are the results for the assessee. Each represents data from four trials.
- the calculation results of the important features are obtained from the exemplary work analysis unit 15.
- the similarity between the model worker and the assessee is calculated based on the degree of separation of data in the feature space by a method in which the similarity is set to 1.0 when the distance is equal to or less than a threshold, and in other distances, the similarity is calculated to decrease as the distance increases, or a method in which no threshold is set and the similarity is calculated to decrease as the distance increases according to the distance.
- a score is calculated based on the similarity calculated in ST142 and ST143.
- the similarity in ST142 and ST143 can be calculated by calculating the average score, with the full score of the similarity based on ST142 being M points and the full score of the similarity based on ST143 being N points.
- Another method is to calculate the average of the similarity calculated in ST142 and the similarity calculated in ST143, and calculate the score based on the full score of a similarity of 1.0.
- the exemplary work procedure is shown in Fig. 9A and is defined from the work label data of the exemplary worker in Fig. 5A.
- the exemplary work procedure is to first check, then loosen the nut, perform the set of "adjust and check bolt B" twice, and then tighten the nut.
- the work process of the model worker and the person being evaluated are compared.
- the presence or absence of unperformed work is checked, and if there is unperformed work, it is extracted.
- unperformed work if there is an elemental work defined in the work procedure of the model worker that is not defined in the work procedure of the assessee, the necessary elemental work is deemed to have been unperformed.
- a range of times is defined in the work procedure of the model worker, and the number of times is less than the range, it is also deemed to have unperformed work.
- the definition shown in Fig. 9A is obtained by acquiring the work progress of the model worker from the model work analysis unit 15. By comparing the work progress of the model worker (Fig. 9A) with the work progress of the assessee (Fig. 12), the first element work "check" is extracted as not being performed.
- the degree of rework is calculated based on the results of comparing the work methods of the model worker and the assessee.
- a method of extracting rework if an elemental work not defined in the model worker's work method is included, it is deemed that an unnecessary elemental work is being performed, and it is deemed a rework. Also, if a range of times is defined in the model worker's work method, and the assessee's work method involves performing the work more than that number of times, it is deemed a rework because the assessee is not performing the work efficiently.
- the work progress of the model worker (FIG. 9A) with the work progress of the assessee (FIG. 12)
- unnecessary elemental work related to bolt A is extracted as rework, as shown in FIG. 13.
- the number of times for the set of "adjusting and checking bolt B" is greater than that of the model worker, so it is considered to be rework.
- the way the assessee proceeds with the work is scored based on the results of ST153 and ST154.
- the allocation of scores for ST153 and ST154 can be changed as desired. Also, it is possible to assign scores based on the importance of specific element tasks.
- the scoring method is arbitrary and is not limited to this method.
- the score for the movement and the score for the work progress are combined to produce a score.
- the score for the movement calculated in ST144 of Fig. 23 (hereinafter, score A) is obtained, and a total score is calculated by adding the score for the work progress calculated in ST155 of Fig. 24 (hereinafter, score B).
- the total score can be calculated by any method, such as averaging score A and score B, or weighting score A and score B and adding them together.
- the results of the evaluation of the person being evaluated are stored in the data storage unit 13 and are also passed to the evaluation result presentation unit 17 .
- the work is manual, and the movement data acquisition unit 11 acquires movement data indicating the movement of the left hand of the person being evaluated and movement data indicating the movement of the right hand of the person being evaluated from the sensor 3. Then, the important section extraction unit 18 extracts left hand important section movement data, which is movement data for sections important to the work, from the movement data indicating the left hand movement based on temporal changes in the movement data indicating the left hand movement acquired by the movement data acquisition unit 11, and extracts right hand important section movement data, which is movement data for sections important to the work, from the movement data indicating the right hand movement based on temporal changes in the movement data indicating the right hand movement acquired by the movement data acquisition unit 11.
- an operator estimation unit 19 that estimates whether the hand used by the assessee is the left hand or the right hand based on the left hand important section motion data and the right hand important section motion data extracted by the important section extraction unit 18, and outputs the left hand important section motion data to the skill evaluation unit 16 if it estimates that the hand used by the assessee is the left hand, and outputs the right hand important section motion data to the skill evaluation unit 16 if it estimates that the hand used by the assessee is the right hand. Therefore, like the skill evaluation device 2 shown in FIG. 1, the skill evaluation device 2 shown in FIG.
- the 24 can suppress deterioration of the skill evaluation result associated with the comparison process between the assessee's motion and the model worker's motion for motions other than the important evaluation items, and can evaluate the skill of the assessee even if the handedness of the assessee is unknown.
- the skill of the assessee can be evaluated even if the assessee changes the hand used for the same type of element work or for a trial.
- the skills can be compared and evaluated.
- Embodiment 3 a skill evaluation device 2 including a designated feature amount acquisition unit 41 that acquires a designated feature amount, which is a feature amount to be analyzed, will be described.
- Fig. 29 is a configuration diagram showing a skill evaluation device 2 according to embodiment 3.
- Fig. 29 the same reference numerals as in Fig. 1 and Fig. 25 indicate the same or corresponding parts, and detailed description thereof will be omitted.
- Fig. 30 is a hardware configuration diagram showing the hardware of the skill evaluation device 2 according to embodiment 3.
- the same reference numerals as in Fig. 2 and Fig. 26 indicate the same or corresponding parts, and therefore detailed description thereof will be omitted.
- the skill evaluation device 2 shown in Figure 29 includes an action data acquisition unit 11, an activity label acquisition unit 12, a data memory unit 13, an important section extraction unit 14, a specified feature acquisition unit 41, a model activity analysis unit 42, a skill evaluation unit 43 and an evaluation result presentation unit 17.
- the designated feature amount acquiring section 41 is realized by, for example, a designated feature amount acquiring circuit 51 shown in FIG.
- the specified feature acquisition unit 41 receives the specified feature when the specified feature is provided as a feature to be analyzed from a man-machine interface (not shown) that is operable by a user.
- the man-machine interface is an interface such as a keyboard, a mouse, a touch panel, or a microphone.
- the designated feature amount acquisition unit 41 outputs the designated feature amount to each of the model work analysis unit 42 and the skill evaluation unit 43 . 29, the designated feature amount acquisition unit 41 acquires the designated feature amount from a man-machine interface.
- the model work analyzing unit 42 is realized by, for example, a model work analyzing circuit 52 shown in FIG.
- the model work analysis unit 42 acquires model worker action data for important sections in each element work from the important section extraction unit 14 . Furthermore, the model work analysis section 42 acquires the designated feature amount from the designated feature amount acquisition section 41 . Similar to the model work analysis unit 15 shown in FIG. 1 , the model work analysis unit 42 identifies important evaluation items for evaluating the work of the person being evaluated based on the model worker action data, and outputs the important evaluation items to the skill evaluation unit 43.
- the model work analysis unit 42 like the model work analysis unit 15 shown in FIG. 1, calculates, as important feature amounts, feature amounts related to the movements for the evaluation items indicated by the model worker movement data.
- the model work analysis unit 42 outputs the important characteristic amounts to the skill evaluation unit 43 .
- the skill evaluation unit 43 is realized by, for example, a skill evaluation circuit 53 shown in FIG.
- the skill evaluation unit 43 acquires the motion data from the important section extraction unit 14 . Furthermore, the skill evaluation unit 43 acquires the designated feature amount from the designated feature amount acquisition unit 41 , and acquires important evaluation items from the model work analysis unit 15 .
- the skill evaluation unit 43 calculates, as important feature amounts, feature amounts related to the action for the evaluation item indicated by the action data.
- the skill evaluation unit 43 evaluates the skill of the person to be evaluated based on the characteristic amounts calculated by the model work analysis unit 42, the characteristic amounts related to the movements indicated by the movement data, and the designated characteristic amounts.
- the skill evaluation unit 43 outputs the skill evaluation results to both the evaluation result presentation unit 17 and the data storage unit 13 .
- the skill evaluation device 2 shown in FIG. 29 is a device in which the specified feature acquisition unit 41, model work analysis unit 42, and skill evaluation unit 43 are applied to the skill evaluation device 2 shown in FIG. 1.
- this is merely an example, and the specified feature acquisition unit 41, model work analysis unit 42, and skill evaluation unit 43 may also be applied to the skill evaluation device 2 shown in FIG. 25.
- each of the components of the skill evaluation device 2 namely, the movement data acquisition unit 11, activity label acquisition unit 12, data storage unit 13, important section extraction unit 14, designated feature acquisition unit 41, model task analysis unit 42, skill evaluation unit 43 and evaluation result presentation unit 17, are realized by dedicated hardware such as that shown in Figure 30.
- the skill evaluation device 2 is realized by the movement data acquisition circuit 21, activity label acquisition circuit 22, data storage circuit 23, important section extraction circuit 24, designated feature acquisition circuit 51, model task analysis circuit 52, skill evaluation circuit 53 and evaluation result presentation circuit 27.
- Each of the action data acquisition circuit 21, the task label acquisition circuit 22, the data storage circuit 23, the important section extraction circuit 24, the specified feature acquisition circuit 51, the model task analysis circuit 52, the skill evaluation circuit 53 and the evaluation result presentation circuit 27 corresponds to, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination of these.
- the components of the skill evaluation device 2 are not limited to those realized by dedicated hardware, and the skill evaluation device 2 may be realized by software, firmware, or a combination of software and firmware.
- the data storage unit 13 is configured on a memory 31 shown in Fig. 3.
- Programs for causing a computer to execute the respective processing procedures of the motion data acquisition unit 11, the activity label acquisition unit 12, the important section extraction unit 14, the designated feature acquisition unit 41, the model activity analysis unit 42, the skill evaluation unit 43, and the evaluation result presentation unit 17 are stored in the memory 31 shown in Fig. 3.
- a processor 32 shown in Fig. 3 executes the programs stored in the memory 31.
- FIG. 30 shows an example in which each of the components of the skill evaluation device 2 is realized by dedicated hardware
- FIG. 3 shows an example in which the skill evaluation device 2 is realized by software or firmware, etc.
- this is merely one example, and some of the components in the skill evaluation device 2 may be realized by dedicated hardware, and the remaining components may be realized by software or firmware, etc.
- the processing contents and specific operations of the action data acquisition unit 11, the task label acquisition unit 12, and the important section extraction unit 14 are the same as those in the first embodiment.
- the specified feature acquisition unit 41 acquires the feature to be analyzed.
- the feature to be analyzed can be defined in advance by the user in a setting file, and can be acquired by reading this. For example, if the user wants to use the speed of the palm, the information palm, speed is defined.
- the feature amount may be inputted using a mouse, keyboard, voice, etc.
- the obtained feature amount is passed to the model work analysis unit 42 and the skill evaluation unit 43.
- the model work analysis unit 42 extracts feature amounts with little variation through multiple trials, and extracts feature amounts (important feature amounts) related to important evaluation items in the work. As described in the first embodiment, there are two types of methods for extracting important features: a. A method of extracting from model worker motion data and task label data of one model worker b. A method of extracting from model worker motion data and task label data of multiple model workers
- Fig. 31 The process flow of the method for extracting important features using data of one model worker described above in a is shown in Fig. 31.
- Fig. 19 of the model work analysis unit 15 of the first embodiment (when data of one model worker is used) are assigned the same numbers as in Fig. 19.
- ST117 an exemplary range is acquired using the data of the model worker for the designated feature amount acquired by the designated feature amount acquisition unit 41.
- the process ST117 of acquiring an exemplary range for the designated feature amount is executed.
- a process flow for the method of extracting important feature amounts using data of a plurality of model workers (b) above is shown in Fig. 32.
- Fig. 32 The same processes as those in Fig.
- model work analysis unit 15 of embodiment 1 when using data of a plurality of model workers
- ST169 has been added, and model ranges are obtained for the designated feature amounts acquired by the designated feature amount acquisition unit 41 for a plurality of model workers.
- the types of important feature amounts and designated feature amounts, and the results of obtaining the exemplary ranges thereof are passed to the skill evaluation unit 43 .
- the skill evaluation unit 43 quantitatively evaluates the skills of the person being evaluated based on an evaluation of the actions using the analysis results of the actions (important work-related evaluation items) extracted by the model work analysis unit 42, and an evaluation of the way the work is carried out using the analysis results of the way the work is carried out (model way the work is carried out) extracted by the model work analysis unit 42.
- processing is performed using specified features in addition to important features.
- a process flow of a method for calculating a score using exemplary ranges of important features and specified features is shown in Fig. 33. The same processes as those in the operation when only important features are used in the first embodiment (Fig. 22) are given the same numbers.
- a score calculation system is created using exemplary ranges of important feature quantities and designated feature quantities.
- important feature quantities are used, but the designated feature quantities are also used in combination, and other aspects are the same as in the first embodiment.
- values are calculated for the important feature values and the designated feature values obtained from the model worker using the motion data of the assessee.
- the first embodiment only the important feature values are used, but the designated feature values are also used in combination, and the rest is the same as in the first embodiment.
- a process flow of a method for vectorizing important feature quantities and designated feature quantities and evaluating them is shown in Fig. 34.
- the same processes as those in the process flow of the first embodiment (Fig. 23) are given the same numbers.
- values are calculated for the designated feature quantities and the important feature quantities obtained from the model worker using the motion data of the assessee. In the first embodiment, only the important feature quantities are used, but in the second embodiment, the designated feature quantities are also used.
- ST146 a feature vector is generated whose components are the important feature values and the designated feature values, and the similarity between the model worker and the person being evaluated is calculated. In the first embodiment, only the important feature values are used, but in the second embodiment, the designated feature values are also used.
- the results of the evaluation by the skill evaluation unit 43 are stored in the data storage unit 13 and are also passed to the evaluation result presentation unit 17 .
- the processing contents and specific operations of the evaluation result presenting unit 17 are similar to those in the first embodiment.
- Embodiment 4. 1 includes a skill evaluation unit 16.
- the skill evaluation unit 16 may be provided outside the skill evaluation device 2.
- Fig. 35 is a configuration diagram showing a skill evaluation device 2 according to embodiment 4.
- the skill evaluation device 2 shown in FIG. 35 does not include the skill evaluation unit 16 and the evaluation result presentation unit 17.
- Either the motion data acquisition unit 11 or the important section extraction unit 14 of the skill evaluation device 2 shown in FIG. 35 outputs the motion data to a skill evaluation unit 16 provided outside the skill evaluation device 2 .
- the model work analysis unit 15 of the skill evaluation device 2 shown in FIG. 35 outputs the evaluation items to a skill evaluation unit 16 provided outside the skill evaluation device 2 .
- the operations of the movement data acquisition unit 11, work label acquisition unit 12, data storage unit 13, important section extraction unit 14 and model work analysis unit 15 provided in the skill evaluation device 2 shown in Figure 35 are similar to the operations of the movement data acquisition unit 11, work label acquisition unit 12, data storage unit 13, important section extraction unit 14 and model work analysis unit 15 provided in the skill evaluation device 2 shown in Figure 1.
- the skill evaluation device 2 shown in FIG. 35 according to the fourth embodiment is the skill evaluation device 2 shown in FIG. 1 with the skill evaluation unit 16 and the evaluation result presentation unit 17 removed.
- the skill evaluation device 2 according to the fourth embodiment may be the skill evaluation device 2 shown in FIG. 25 with the skill evaluation unit 16 and the evaluation result presentation unit 17 removed, or the skill evaluation device 2 shown in FIG. 29 with the specified feature acquisition unit 41, the skill evaluation unit 43, and the evaluation result presentation unit 17 removed.
- the skill evaluation device 2 is configured to include a motion data acquisition unit 11 that acquires motion data indicating the motion of the work from a sensor 1 that detects the motion of the work being performed by the person whose work skills are being evaluated, and an exemplary work analysis unit 15 that identifies important evaluation items for evaluating the work of the person being evaluated based on exemplary worker motion data indicating the motion of the exemplary worker, and the exemplary work analysis unit 15 outputs the identified evaluation items to the skill evaluation unit 16. Therefore, similar to the skill evaluation device 2 shown in FIG. 1, the skill evaluation device 2 shown in FIG. 35 can suppress deterioration of the skill evaluation results that accompanies the process of comparing the motion of the person being evaluated with the motion of the exemplary worker for motions other than the important evaluation items.
- multiple pieces of data such as motion data and work label data are stored in a database, but they do not have to be stored in database format.
- the method of storing multiple motion data and work data is arbitrary.
- an example of the operation of the model work analysis unit 15 etc. is shown in which a feature with a standard deviation below a threshold is extracted as a feature with low variability, but the method of extracting a feature with low variability is not limited to using the standard deviation. Instead of the standard deviation, a value obtained by dividing the standard deviation by the average value can also be used. Any other method may also be used.
- the body parts to be analyzed are not limited to the hands.
- other body parts such as the head, feet, elbows, etc. can be evaluated.
- the configuration of the device when evaluating body parts other than the hands is the same as the device configuration in FIG. 25 except that the "operating hand estimation unit 19" is removed.
- the time period during which the hands or head are moving before reaching the fixed position is included between the start frame and end frame defined in the work label data, and the device is configured to exclude the time period until the fixed position is reached using the important section extraction unit 14, etc.
- the device when using work label data in which the start frame and end frame are defined excluding the time period during which the hands or head are moving before reaching the fixed position, the device is implemented with a configuration excluding the important section extraction unit 14, etc. In this case, the device configuration in FIG. 1, FIG. 25, FIG. 29, and FIG. 35 is configured without the important section extraction unit 14, etc.
- the model work analysis unit 15 and the like have shown examples of operation using the action data and work label data of multiple maintenance tasks performed by a model worker, but the present invention can also be applied to cases where there is only the action data and work label data of one maintenance task.
- the evaluation result presentation unit 17 can output the scores of the working hand and the non-working hand separately to a screen or file.
- the skill evaluation unit 16 etc. performs an evaluation by integrating the evaluation of the action and the evaluation of the progress of the work, but it is possible to present (or output as a file) only the evaluation of the action or only the evaluation of the progress of the action as the final evaluation result.
- the skill evaluation unit 16 etc. shows an example of an operation that presents information that makes it easy to understand the differences between the model worker and the person being evaluated, but it is also possible to output to a screen or file only the work points obtained from an analysis of the model worker's actions and the way the work is carried out, without including the evaluation results of the person being evaluated.
- the maintenance work of adjusting bolts has been described as an example, but the work to be evaluated is not limited to adjusting bolts, and is not limited to maintenance work. It can be applied to a variety of other tasks (work on production lines, maintenance work, inspection work, manual work such as traditional crafts, daily work, etc.).
- this disclosure allows for free combinations of each embodiment, modifications to any of the components of each embodiment, or the omission of any of the components of each embodiment.
- This disclosure is suitable for skill assessment devices and skill assessment methods.
- 1 sensor, 2 skill evaluation device, 3 sensor 11 motion data acquisition unit, 12 task label acquisition unit, 13 data storage unit, 14 important section extraction unit, 15 model task analysis unit, 16 skill evaluation unit, 17 evaluation result presentation unit, 18 important section extraction unit, 19 worker estimation unit, 21 motion data acquisition circuit, 22 task label acquisition circuit, 23 data storage circuit, 24 important section extraction circuit, 25 model task analysis circuit, 26 skill evaluation circuit, 27 evaluation result presentation circuit, 28 important section extraction circuit, 29 worker estimation circuit, 31 memory, 32 processor, 41 designated feature acquisition unit, 42 model task analysis unit, 43 skill evaluation unit, 51 designated feature acquisition circuit, 52 model task analysis circuit, 53 skill evaluation circuit.
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Entrepreneurship & Innovation (AREA)
- General Factory Administration (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023552289A JP7615341B1 (ja) | 2023-04-11 | 2023-04-11 | 技能評価装置、技能評価方法及びプログラム |
| CN202380096753.4A CN121039724A (zh) | 2023-04-11 | 2023-04-11 | 技能评价装置和技能评价方法 |
| PCT/JP2023/014641 WO2024214161A1 (ja) | 2023-04-11 | 2023-04-11 | 技能評価装置及び技能評価方法 |
| DE112023005765.6T DE112023005765T5 (de) | 2023-04-11 | 2023-04-11 | Kompetenzbewertungseinrichtung und kompetenzbewertungsverfahren |
| US19/308,489 US20250391282A1 (en) | 2023-04-11 | 2025-08-25 | Skill evaluation device, skill evaluation method, and medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/014641 WO2024214161A1 (ja) | 2023-04-11 | 2023-04-11 | 技能評価装置及び技能評価方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US19/308,489 Continuation US20250391282A1 (en) | 2023-04-11 | 2025-08-25 | Skill evaluation device, skill evaluation method, and medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024214161A1 true WO2024214161A1 (ja) | 2024-10-17 |
Family
ID=93059106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/014641 Ceased WO2024214161A1 (ja) | 2023-04-11 | 2023-04-11 | 技能評価装置及び技能評価方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250391282A1 (https=) |
| JP (1) | JP7615341B1 (https=) |
| CN (1) | CN121039724A (https=) |
| DE (1) | DE112023005765T5 (https=) |
| WO (1) | WO2024214161A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7745802B1 (ja) * | 2025-04-30 | 2025-09-29 | 株式会社エヌ・エフ・ラボラトリーズ | 評価装置、評価方法、およびコンピュータプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019144822A (ja) * | 2018-02-20 | 2019-08-29 | 株式会社日立製作所 | 形式知化システムおよびその方法 |
| JP2020003707A (ja) * | 2018-06-29 | 2020-01-09 | 株式会社日立システムズ | コンテンツ作成システム |
| JP2022006919A (ja) * | 2020-06-25 | 2022-01-13 | オムロン株式会社 | 動作認識システム、方法及びプログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4264368B2 (ja) * | 2004-02-24 | 2009-05-13 | 日本ナレッジ株式会社 | 実技分析システム及びプログラム |
| JP7103078B2 (ja) * | 2018-08-31 | 2022-07-20 | オムロン株式会社 | 作業支援装置、作業支援方法及び作業支援プログラム |
| JP7249444B1 (ja) * | 2022-02-14 | 2023-03-30 | 日鉄ソリューションズ株式会社 | 情報処理装置、情報処理方法、プログラム、及び情報処理システム |
-
2023
- 2023-04-11 CN CN202380096753.4A patent/CN121039724A/zh active Pending
- 2023-04-11 WO PCT/JP2023/014641 patent/WO2024214161A1/ja not_active Ceased
- 2023-04-11 DE DE112023005765.6T patent/DE112023005765T5/de active Pending
- 2023-04-11 JP JP2023552289A patent/JP7615341B1/ja active Active
-
2025
- 2025-08-25 US US19/308,489 patent/US20250391282A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019144822A (ja) * | 2018-02-20 | 2019-08-29 | 株式会社日立製作所 | 形式知化システムおよびその方法 |
| JP2020003707A (ja) * | 2018-06-29 | 2020-01-09 | 株式会社日立システムズ | コンテンツ作成システム |
| JP2022006919A (ja) * | 2020-06-25 | 2022-01-13 | オムロン株式会社 | 動作認識システム、方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7615341B1 (ja) | 2025-01-16 |
| US20250391282A1 (en) | 2025-12-25 |
| DE112023005765T5 (de) | 2025-12-18 |
| CN121039724A (zh) | 2025-11-28 |
| JPWO2024214161A1 (https=) | 2024-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7458623B2 (ja) | 作業分析装置及び作業分析方法 | |
| EP3686840A1 (en) | Abnormality detection device and abnormality detection method | |
| US11568290B2 (en) | Method for displaying, user interface unit, display device and inspection apparatus | |
| CN111402287B (zh) | 用于活动序列的标准化评估的系统和方法 | |
| JP7615341B1 (ja) | 技能評価装置、技能評価方法及びプログラム | |
| CN110826383B (zh) | 分析系统、分析方法、程序以及存储介质 | |
| US11353860B2 (en) | Data analysis device, system, method, and recording medium storing program | |
| JP6779413B2 (ja) | 作業分析装置 | |
| Chen et al. | Automatic repetitive action counting for construction worker ergonomic assessment | |
| US11966218B2 (en) | Diagnosis device, diagnosis method and program | |
| Du et al. | Joint angle data representation for data driven human motion synthesis | |
| Azadi et al. | Feasibility analysis of unsupervised industrial activity recognition based on a frequent micro action | |
| JP7433648B2 (ja) | 異常検出方法 | |
| JP2022003491A (ja) | 分析装置、分析システム、分析方法、プログラム、及び記憶媒体 | |
| Wu et al. | Hand tracking in a natural conversational environment by the interacting multiple model and probabilistic data association (IMM-PDA) algorithm | |
| US20240110850A1 (en) | Abnormality determination model generating device, abnormality determination device, abnormality determination model generating method, and abnormality determination method | |
| US20240013566A1 (en) | Image processing apparatus, image processing method, and non-transitory storage medium | |
| US20240078840A1 (en) | Device and method for classifying biometric authentication data | |
| JP7682825B2 (ja) | 分析装置、方法およびプログラム | |
| Jaber et al. | Proposing a three-stage model to quantify bradykinesia on a symptom severity level using deep learning | |
| Lins et al. | Unsupervised Temporal Segmentation of Skeletal Motion Data using Joint Distance Representation. | |
| JPWO2021199295A5 (ja) | 情報処理装置、情報処理方法、及び、プログラム | |
| EP4575983A1 (en) | Method for detecting surface defect and apparatus thereof | |
| US20230154234A1 (en) | Device and method for classifying biometric authentication data | |
| JP2025070261A (ja) | 把持期間判定プログラム,把持期間判定方法及び情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023552289 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23932941 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202517082126 Country of ref document: IN |
|
| WWP | Wipo information: published in national office |
Ref document number: 202517082126 Country of ref document: IN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112023005765 Country of ref document: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 112023005765 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 23932941 Country of ref document: EP Kind code of ref document: A1 |