WO2024095320A1 - Rotary electric machine - Google Patents
Rotary electric machine Download PDFInfo
- Publication number
- WO2024095320A1 WO2024095320A1 PCT/JP2022/040740 JP2022040740W WO2024095320A1 WO 2024095320 A1 WO2024095320 A1 WO 2024095320A1 JP 2022040740 W JP2022040740 W JP 2022040740W WO 2024095320 A1 WO2024095320 A1 WO 2024095320A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- electric machine
- rotor core
- rotating electric
- mass body
- guide
- Prior art date
Links
- 239000010687 lubricating oil Substances 0.000 claims description 14
- 230000004323 axial length Effects 0.000 claims description 5
- 230000033001 locomotion Effects 0.000 claims description 4
- 239000003921 oil Substances 0.000 claims description 3
- 239000013585 weight reducing agent Substances 0.000 abstract description 29
- 230000010355 oscillation Effects 0.000 abstract description 3
- 230000002093 peripheral effect Effects 0.000 abstract 1
- 230000004907 flux Effects 0.000 description 10
- 239000003638 chemical reducing agent Substances 0.000 description 9
- 230000000694 effects Effects 0.000 description 6
- 230000001360 synchronised effect Effects 0.000 description 6
- 230000037431 insertion Effects 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 239000000696 magnetic material Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 239000006096 absorbing agent Substances 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000001737 promoting effect Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/04—Balancing means
Definitions
- This disclosure relates to a rotating electric machine having end plates at both axial ends of a rotor core.
- Patent Document 1 shows a pendulum damper including a support member including two annular plates fixed to a rotor, and a plurality of pendulum balance weights arranged between the annular plates of the support member.
- the two annular plates have openings as guide tracks having an epicycloidal shape, and a guide roller is engaged with the pendulum balance weight. The end of the guide roller is guided by the openings of the two annular plates, so that the pendulum balance weight vibrates between the two annular plates that are the support members.
- Patent Document 1 also shows that in order to incorporate the pendulum damper into the rotor structure, a part of the assembly of sheet metal of the rotor is cut out to provide an accommodation space for the pendulum balance weight, and the annular plates of the support member are arranged on both axial sides of the accommodation space.
- Patent Document 1 multiple pendulum balance weights are provided in a portion of the axial area of the rotor, so in order to increase the weight of the pendulum balance weights to effectively reduce vibration and noise caused by torque ripple, it is necessary to increase the volume of the rotor, which poses a challenge in promoting the miniaturization of rotors and rotating electrical machines.
- This disclosure was made in consideration of the above, and aims to provide a rotating electric machine that can suppress vibrations and noise caused by torque ripple without increasing the volume of the rotor.
- the rotating electric machine of the present disclosure includes a rotor and a stator.
- the rotor includes a rotor core having a shaft hole, a plurality of permanent magnets provided on the outer periphery of the rotor core, a plurality of through holes provided between the shaft hole and the plurality of permanent magnets, a plurality of mass bodies having a first guide body which is one of a convex portion and a concave portion at both ends and inserted into the plurality of through holes, and a pair of end plates provided on both ends of the rotor core and having a plurality of second guide bodies which are the other of the convex portions and the concave portions.
- the oscillation of the mass bodies relative to the rotor core is guided by the sliding of the first guide body relative to the second guide body.
- the rotating electric machine disclosed herein has the advantage of being able to suppress vibrations and noise caused by torque ripple without increasing the volume of the rotor.
- FIG. 1 is a block diagram showing a configuration example of a drive train of an electric vehicle to which the rotating electric machine according to the first to fourth embodiments is applied;
- FIG. 1 is a plan view showing a configuration of a rotating electric machine according to first to fourth embodiments;
- FIG. 1 is an enlarged plan view showing a configuration in which a part of a rotating electric machine according to first to fourth embodiments is enlarged.
- FIG. 1 is a perspective view showing a configuration of a rotor of a rotating electric machine according to a first embodiment;
- FIG. 1 is an enlarged view showing a configuration in which a part of a rotor of a rotating electric machine according to a first embodiment is enlarged;
- FIG. 1 is a block diagram showing a configuration example of a drive train of an electric vehicle to which the rotating electric machine according to the first to fourth embodiments is applied;
- FIG. 1 is a plan view showing a configuration of a rotating electric machine according to first to fourth embodiments;
- FIG. 1 is an
- FIG. 1 is a plan view showing a configuration of a rotor core of a rotating electric machine according to a first embodiment
- FIG. 1 is a perspective view showing a configuration of a pendulum mass body of a rotating electric machine according to a first embodiment
- FIG. 1 is a plan view showing a positional relationship between a weight reduction hole and a mass body of a rotating electric machine according to a first embodiment
- FIG. 11 is a plan view showing a configuration of a rotor core of a rotating electric machine according to a second embodiment of the present invention
- FIG. 11 is a perspective view showing a configuration of an end plate of a rotating electric machine according to a second embodiment
- FIG. 11 is a perspective view showing a configuration of a pendulum mass body of a rotating electric machine according to a third embodiment
- FIG. 13 is a perspective view showing a configuration of an end plate of a rotating electric machine according to a third embodiment
- FIG. 13 is a perspective view showing a configuration of a rotor of a rotating electric machine according to a fourth embodiment.
- FIG. 13 is a perspective view showing a configuration of a back surface of one end plate of a rotating electric machine according to a fourth embodiment, the back surface facing a rotor core
- FIG. 13 is a perspective view showing the configuration of the front surface of the other end plate of the rotating electric machine according to the fourth embodiment
- FIG. 13 is a plan view showing a partial configuration of a rear surface of one end plate of a rotating electric machine according to a fourth embodiment;
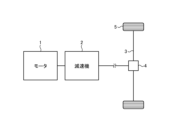
- FIG. 1 is a block diagram showing an example of the configuration of a drive train of an electric vehicle to which the rotating electric machine of embodiments 1 to 4 is applied.
- the electric vehicle shown in FIG. 1 has, as its main components, a motor 1 as a rotating electric machine, a reduction gear 2, a drive shaft 3, a differential gear 4, and driving wheels 5.
- the motor 1 has a rotor that functions as a pendulum damper.
- the motor 1 rotates by receiving power from an inverter (not shown) and generates motor torque.
- the motor 1 is a synchronous motor whose rotor rotates in a rotating magnetic field of three-phase AC.
- the motor 1 has a rotor with a permanent magnet embedded therein, a stator made of an electromagnet, and a motor case (not shown) that houses the stator and rotor.
- the reducer 2 arranged on the output side of the motor 1 transmits torque between the motor 1 and the drive wheels 5.
- the reducer 2 is provided between the motor 1 and the drive wheels 5 on the power transmission path.
- the reducer 2 is a mechanism that can appropriately change the gear ratio, which is the ratio of the rotation speed of the output shaft to the rotation speed of the input shaft.
- the differential gear 4 is a differential device that detects the difference in the rotation speed of the two drive wheels 5 and distributes and transmits the torque of the reducer 2 to each drive wheel 5.
- the differential gear 4 transmits the torque transmitted from the reducer 2 to the drive wheels 5.
- the drive wheels 5 are wheels to which the drive torque output by the drive power source is transmitted and which generate the drive force of the electric vehicle.
- FIG. 2 is a plan view showing the configuration of the rotating electric machine of the first to fourth embodiments.
- FIG. 3 is an enlarged plan view showing the configuration of a part of the rotating electric machine of the first to fourth embodiments.
- FIG. 2 and FIG. 3 show the components common to the first to fourth embodiments.
- the motor 1 has a rotor 6 and a stator 7.
- the rotor 6 is arranged inside the stator 7.
- the torque generated by the motor 1 is amplified and attenuated by the connected reducer 2 and transmitted to the drive wheels 5. Therefore, the torque ripple generated by the motor 1 is transmitted to the drive shaft 3, causing vibration and noise in the entire electric vehicle.
- the rotor 6 has a rotor core 8, a permanent magnet 9, an end plate, and a pendulum mass body.
- the end plate and the pendulum mass body will be described later.
- the rotor core 8 may be made of a laminate of electromagnetic steel sheets, or may be made of other materials such as a powder core made by pressure
- the motor 1 is an interior permanent magnet synchronous motor (IPMSM) with permanent magnets 9 embedded inside the rotor core 8.
- IPMSM interior permanent magnet synchronous motor
- the rotor core 8 has a plurality of magnet insertion holes 10 for embedding the plurality of permanent magnets 9 on its outer periphery.
- the rotor core 8 has a shaft hole 12 through which a shaft (not shown) that connects the motor 1 and the reducer 2 passes.
- the rotor core 8 also has a plurality of weight reduction holes 11, which are through holes for reducing the weight of the rotor core 8 and improving the magnetic flux density while maintaining the strength to withstand the centrifugal force generated in the rotor core 8 and the permanent magnets 9.
- the weight reduction holes 11 are provided between the plurality of permanent magnets 9 and the shaft hole 12.
- Each weight reduction hole 11 is a through hole.
- an interpole bridge 13 extending radially inward from the outer circumferential surface of the rotor core 8, and an interpole gap (flux barrier) 14, which is a gap for preventing magnetic flux short circuits.
- the interpole gap 14 is a gap formed in the magnet insertion hole 10, and the tip of the interpole gap 14 is rounded, for example, in a semi-elliptical shape 15.
- Fig. 4 is a perspective view showing the configuration of the rotor 6 of the rotating electric machine according to the first embodiment.
- Fig. 5 is an enlarged view showing the configuration of a part of the rotor 6 of the rotating electric machine according to the first embodiment.
- Fig. 5 shows an enlarged view of the V part of Fig. 4.
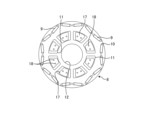
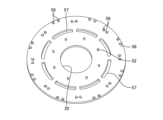
- Fig. 6 is a plan view showing the configuration of the rotor core 8 of the rotating electric machine according to the first embodiment.
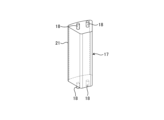
- Fig. 7 is a perspective view showing the configuration of the pendulum mass body 17 of the rotating electric machine according to the first embodiment.
- the rotor 6 has a rotor core 8 and a pair of end plates 16.
- the end plates 16 are disposed at both ends of the rotor core 8 to prevent misalignment of the rotor core 8 and the permanent magnets 9 and to ensure the rotational balance of the rotor core 8.
- the end plates 16 are provided with a shaft hole 20 for passing the shaft through, and the inner diameter of the shaft hole 20 matches the inner diameter of the shaft hole 12 of the rotor core 8. To prevent the shaft from being separated from the rotor core 8 and the end plates 16 due to rotation, these components are fixed by press fitting, but they may also be fixed with a key structure.
- the end plate 16 is made of a non-magnetic material to reduce the effect on the magnetic flux.
- the end plate 16 has a guide hole 19 as a second guide body for determining the swing trajectory of the pendulum mass body 17 (described later) provided in the rotor core 8.
- the guide hole 19 is a through hole.
- the guide hole 19 may also be a blind hole with a bottom. Through holes and blind holes are collectively referred to as a recess.
- a plurality of guide holes 19 are arranged along the circumferential direction of the end plate 16. Specifically, the guide holes 19 are arranged in multiple sets of two as shown in FIG. 5.
- a pendulum mass 17 is embedded in the weight reduction hole 11 of the rotor core 8.
- the pendulum mass 17 is also simply called the mass 17.
- the mass 17 includes a weight portion 21 and a protrusion 18.
- the weight portion 21 has a length that is, for example, the entire axial length of the weight reduction hole 11, which is a through hole. Both ends of the mass 17 inserted into the weight reduction hole 11 have protrusions 18 as first guide bodies for restraining the swing trajectory in the guide hole 19 of the end plate 16.
- the protrusion 18, which is a convex portion is fixed to the weight portion 21 and has, for example, a cylindrical shape.
- the protrusion 18 may have any other shape, such as a hexagonal column.
- the protrusion 18 may also have a fixed axis or a central axis that can rotate freely.
- two protrusions 18 are provided on each side of each mass body 17 to suppress rotational movement of the mass body 17 around its axis and promote sliding of the mass body 17.
- pairs of guide holes 19, which are paired with the mass body 17 having two protrusions 18 on one side, are arranged in the circumferential direction on the end plate 16 in the same number as the mass body 17.
- the pair of guide holes 19 are arranged so as to be mirror-symmetrical with respect to a radial line passing through the center of the pair of guide holes 19.
- one protrusion 18 may be arranged on each side of each mass body 17.
- the cross section of the protrusions 18 is not limited to a circular shape, and may be any curved or polygonal shape.
- FIG. 8 is a plan view showing the positional relationship between the weight reduction hole 11 and the mass body 17 of the rotating electric machine of the first embodiment.
- the cross-sectional shape of the weight portion 21 of the mass body 17 is similar to the cross-sectional shape of the weight reduction hole 11. This is to increase the inertia of the mass body 17.
- the cross-sectional shapes of the weight portion 21 and the weight reduction hole 11 are set so that a gap is generated between the mass body 17 and the inner wall of the weight reduction hole 11 of the rotor core 8 at all positions on the orbit, as shown in FIG. 8. If there is no gap between the mass body 17 and the inner wall of the weight reduction hole 11, not only will the desired vibration damping effect not be obtained due to nonlinear behavior caused by a collision, but abnormal noise may also be generated and the rotor core 8 may be deformed.
- the axial length L1 of the weight portion 21 of the mass body 17 is set shorter than the axial length Lr of the rotor core 8, and the overall length Lt of the pendulum mass body 17 including the protrusions 18 is desirably designed to be slightly smaller than Lr + 2Lp, which is the total length of the axial length Lr of the rotor core 8 and the thickness Lp of the end plates 16 connected to both ends of the rotor core 8. This prevents interference with the reducer 2, the motor case, etc.
- the mass body 17 is made of a non-magnetic material to reduce its effect on the magnetic flux.
- the mass body 17 may be a magnetic material (conductor), in which case, when the mass body 17 moves to a position of high magnetic flux density due to electromagnetic induction, a damping effect is generated, preventing excessive displacement of the weight portion 21 and reducing abnormal noise that occurs when the protrusion 18 comes into contact with the end of the guide hole 19.
- the orbit radius of the swing orbit of the mass body 17 is determined by the order of rotation that causes the cogging torque or torque ripple vibration according to the number of pole pairs of the motor 1.
- the swing orbit of the mass body 17 may be a circular orbit, or may be determined by a higher order function to prevent unstable behavior of the pendulum.
- the rotation radius L of the swing orbit of the mass body 17 and the distance R between the center of rotation of the swing orbit of the mass body 17 and the center of the rotor core 8 are set so that the effective rotation order that produces the effect as a vibration absorber in a rotating electric machine composed of a three-phase AC synchronous motor coincides with the frequency obtained by multiplying the number of pole pairs N of the permanent magnet 9 by the sixth order frequency component that is the main frequency component of the torque ripple of the three-phase AC synchronous motor.
- Cogging is a pulsating torque caused by the magnetic field generated between the rotor core 8 and permanent magnets 9 when the motor 1 is not energized, and its magnitude is constant regardless of the current when the motor 1 is energized. It is generally known that the lower the rotation speed of the motor 1, the greater the pulsating torque becomes, and that increasing the rotation speed increases the inertial force acting on the rotor core 8, resulting in a relatively smaller pulsating torque.
- Torque ripple corresponds to the fluctuation in electromagnetic torque generated by the field flux of the permanent magnets 9 and the current in the coil when the motor 1 is energized, and its magnitude is said to be proportional to the current.
- the center of the weight reduction hole 11 is located at a position that overlaps with the d-axis or q-axis, and is located at a position that does not interfere with the magnet insertion hole 10 into which the permanent magnet 9 is inserted. If the center of the weight reduction hole 11 is not located on the d-axis or q-axis, the distribution of the interlinkage magnetic flux becomes asymmetric with respect to the d-axis and q-axis, and the spatial harmonic components of the magnetic flux increase. This increases iron loss, radial electromagnetic force, and torque ripple. To prevent this, the center of the weight reduction hole 11 is located at a position that overlaps with the d-axis or q-axis.
- the rotor core 8 is provided with the weight-reducing holes 11, which are through holes, the mass body 17 is arranged so as to penetrate the rotor core 8, protrusions 18 are provided at both ends of the mass body 17 as first guide bodies, and the end plate 16 is provided with guide holes 19 as second guide bodies, and the sliding of the protrusions 18 relative to the guide holes 19 guides the oscillation of the mass body 17 relative to the rotor core 8. This makes it possible to suppress vibrations and noise due to torque ripple without increasing the volume of the rotor 6.
- Embodiment 2 is a plan view showing the configuration of rotor core 8 of a rotating electric machine according to embodiment 2.
- Fig. 10 is a perspective view showing the configuration of an end plate 32 of a rotating electric machine according to embodiment 2.
- mass body 17 of embodiment 1 is replaced with mass body 30, and end plate 16 of embodiment 1 is replaced with end plate 32.
- Other configurations in embodiment 2 are similar to those in embodiment 1, and repeated explanations will be omitted.
- guide grooves 31, which are recesses that define the swing trajectory, are provided at both ends of each mass body 30.
- the guide grooves 31 correspond to the first guide body.
- a plurality of protrusions 33, which are convex portions, are provided intermittently in the circumferential direction on each end plate 32.
- the protrusions 33 correspond to the second guide body.
- one protrusion 33 is provided corresponding to each guide groove 31, and each protrusion 33 slides within each guide groove 31.
- the mass body 30 slides and at the same time rotates around the axis of the protrusion 33.
- the axial center of the protrusion 33 is eccentric and offset from the center of gravity (center) of the mass body 30. If the guide groove 31 is provided radially outward from the center position of the mass body 30, there is a possibility that the mass body 30 will collide with the inner wall of the weight reduction hole 11 when it rotates around its axis. To prevent this, according to embodiment 2, the guide groove 31 is provided radially inward from the center position of the mass body 30.
- the guide grooves 31 are provided radially inward from the center position of the mass body 30, so that even if one protrusion 33 is provided corresponding to each guide groove 31, interference with the weight reduction hole 11 due to rotation of the mass body 30 can be prevented.
- Fig. 11 is a perspective view showing a configuration of a pendulum mass body 41 of a rotating electric machine according to the third embodiment.
- Fig. 12 is a perspective view showing a configuration of an end plate 46 of a rotating electric machine according to the third embodiment.
- the pendulum mass body 41 includes a first mass body 41a including a weight portion 43a having projections 42a as first projections at both ends, a second mass body 41b including a weight portion 43b having projections 42b as second projections at both ends, and a connecting member 45 connecting the projections 42a and 42b.
- the first mass body 41a is inserted into the weight reduction hole 11 as a first through hole
- the second mass body 41b is inserted into the weight reduction hole 11 as a second through hole.
- the end plate 46 is formed with two guide holes 47, which are through holes that guide the two protrusions 42a and 42b of the pendulum mass body 41, and a recess 48 that connects the two guide holes 47 and serves as a third recess that accommodates the connecting member 45 of the pendulum mass body 41.
- One of the two guide holes 47 corresponds to the first recess, and the other corresponds to the second recess.
- the end plate 46 is provided with four sets of configurations having two guide holes 47 and recesses 48 in order to support the four pendulum mass bodies 41.
- the other configurations in the third embodiment are the same as those in the first embodiment, and redundant explanations will be omitted.
- the lightening hole 11 in the third embodiment is not shown, it is preferable that the lightening hole 11 has a shape similar to the cross-sectional shape of the weights 43a and 43b, as in the lightening hole 11 in the first embodiment.
- the protrusion 42a of the first mass 41a and the protrusion 42b of the second mass 41b are connected by a connecting member 45 to form a single pendulum mass 41.
- the connecting member 45 connects the tips of the protrusions 42a and 42b of the first mass 41a and the second mass 41b.
- the connecting member 45 has the effect of preventing the mass 41 from rotating around the protrusions 42a and 42b. Furthermore, as shown in Figures 4 and 8, if two guide holes 19 can be arranged corresponding to one weight reduction hole 11, the mass 41 can be prevented from rotating. However, even if only one guide hole 19 can be arranged corresponding to one weight reduction hole 11, this configuration can prevent the mass 41 from rotating and promote the sliding of the mass 41.
- the recess 48 is provided in the end plate 46, so that the connecting member 45 can be prevented from being exposed.
- the pair of guide holes 47 are arranged in mirror symmetry with respect to a radial line that passes through the middle of the pair of guide holes 47. This allows the mass body 41 to perform pendulum motion with the positional relationship of the axes of the two protrusions 42a, 42b fixed.
- the pendulum mass 41 is formed by connecting the first mass 41a and the second mass 41b with the connecting member 45, which prevents the mass 41 from rotating and promotes the sliding of the mass 41.
- FIG. 13 is a perspective view showing the configuration of the rotor 6 of the rotating electric machine of the fourth embodiment.
- FIG. 14 is a perspective view showing the configuration of the back surface of one end plate 51 of the rotating electric machine of the fourth embodiment, which faces the rotor core 8.
- FIG. 15 is a perspective view showing the configuration of the front surface of the other end plate 56 of the rotating electric machine of the fourth embodiment.
- FIG. 16 is a plan view showing a partial configuration of the back surface of one end plate 51 of the rotating electric machine of the fourth embodiment.
- one end plate 32 of the rotating electric machine of the second embodiment is replaced with an end plate 51
- the other end plate 32 of the rotating electric machine of the second embodiment is replaced with an end plate 56.
- the other configurations in the fourth embodiment are the same as those in the second embodiment, and redundant explanations will be omitted. That is, in the rotating electric machine of FIGS. 13 to 16, a plurality of protrusions 52 are arranged in the circumferential direction on the end plates 51 and 56, and a plurality of mass bodies 30 having a plurality of weight-reducing holes 11 and guide grooves 31 shown in FIG. 9 are provided in the rotor core 8 shown in FIG. In this way, the protrusions 52 in the fourth embodiment correspond to the protrusions 33 in the second embodiment.
- an end plate 51 is disposed at one end of the rotor core 8, and an end plate 56 is disposed at the other end of the rotor core 8.
- the end plate 51 has a flow path 53 for supplying lubricating oil to the protrusions 52 and the guide grooves 31, and the end plate 56 has discharge holes 57, 58 for discharging the lubricating oil supplied from the end plate 51.
- the lubricating oil may contain a coolant in addition to the lubricant.
- a flow path 53 is formed on the back surface of the end plate 51 as an oil groove.
- the flow path 53 reduces the contact friction of the protrusions 52 engaging with the guide grooves 31, and allows the flow of lubricating oil that cools the rotor core 8 as a whole.
- the flow path 53 has a plurality of grooves 53a extending from the shaft hole 20 on the inner periphery side of the end plate 51 to the protrusions 52, and a plurality of grooves 53b branching from the protrusions 52 and extending to the outer periphery of the end plate 51.
- the ends of the plurality of grooves 53b are provided at positions corresponding to the inter-pole gaps 14 formed in the rotor core 8.
- the lubricating oil that flows in from the shaft hole 20 flows into the protrusions 52 and guide grooves 31 via the plurality of grooves 53a, as shown by the arrows in FIG. 16, and a portion of the lubricating oil flows into the inside of the weight reduction hole 11 of the rotor core 8 into which the mass body 30 is inserted.
- the remaining lubricating oil flows through groove 53b while branching, as shown by the arrows in Figure 16, and reaches tip 55 of groove 53b, and then flows into inter-pole gap 14 of rotor core 8.
- the end plate 56 has a plurality of discharge holes 57 provided at positions corresponding to the plurality of weight reduction holes 11 of the rotor core 8, and a plurality of discharge holes 58 provided at positions corresponding to the plurality of inter-pole gaps 14 of the rotor core 8.
- the lubricating oil that flows into the weight reduction holes 11 of the rotor core 8 from the end plate 51 on one side is discharged from the discharge holes 57 of the end plate 56.
- the lubricating oil that flows into the inter-pole gaps 14 of the rotor core 8 from the end plate 51 on one side is discharged from the discharge holes 58 of the end plate 56.
- the lubricating oil inside the weight reduction hole 11 is subjected to centrifugal force and flows out from the radially outer inner wall. Therefore, for efficient discharge, it is desirable to position the discharge hole 57 radially outward of the weight reduction hole 11.
- the lubricating oil is discharged radially outward of the rotor core 8, but the flow path configuration may also be such that the lubricating oil is recovered toward the shaft hole 20.
- an oil groove is provided to supply lubricating oil to the guide groove 31 and the protrusion 52 to dissipate frictional heat, thereby reducing frictional heat between the guide groove 31 and the protrusion 52 and promoting smooth rocking motion of the mass body 30.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
This rotary electric machine has a rotor that comprises: a rotor core (8) having a shaft hole (12); a plurality of permanent magnets provided in an outer peripheral portion of the rotor core (8); a plurality of weight reduction holes (11) provided between the shaft hole (12) and the plurality of permanent magnets; a plurality of mass bodies (17) that have projections (18) at both end sections and that are inserted in the plurality of weight reduction holes (11); and a pair of end plates that are provided at both ends of the rotor core (8) and that have guide holes (19). The sliding of the projections (18) relative to the guide holes (19) guides the oscillation of the mass bodies (17) relative to the rotor core.
Description
本開示は、ロータコアの軸方向の両端に端板を有する回転電機に関する。
This disclosure relates to a rotating electric machine having end plates at both axial ends of a rotor core.
回転電機にあっては、ロータの回転とともにロータとステータとの間の磁束の相互作用により脈動現象であるトルクリップルが生じる。その結果、回転電機の出力軸を介して回転電機を搭載する筐体に振動、騒音が発生する。EV(Electric Vehicle)に搭載されるモータを開発するにあたっては、トルクリップルによる振動騒音の低減は重要な課題である。このため、機械的に振動抑制可能な遠心振り子式動吸振器(CPA:Centrifugal Pendulum Absorber)を回転電機に取り付ける対策がある。
In rotating electric machines, torque ripple, a pulsating phenomenon, occurs due to the interaction of magnetic flux between the rotor and stator as the rotor rotates. As a result, vibration and noise are generated in the housing in which the rotating electric machine is mounted via the output shaft of the rotating electric machine. When developing motors to be mounted in EVs (Electric Vehicles), reducing vibration and noise caused by torque ripple is an important issue. For this reason, one measure is to attach a centrifugal pendulum absorber (CPA), which can mechanically suppress vibration, to the rotating electric machine.
特許文献1には、ロータに固定される2つの環状板を含む支持部材と、支持部材の環状板の間に配置された複数の振り子バランスウェイトと、を含む振り子ダンパが示されている。2つの環状板は、外サイクロイド形状を有する案内トラックとしての開口部を有し、振り子バランスウェイトには案内ローラが係合されている。案内ローラの端部が2つの環状板の開口部によって案内されることで、振り子バランスウェイトが支持部材である2つの環状板間で振動する。また、特許文献1には、振り子ダンパをロータの構造に組み込むために、ロータのシートメタルの集合体の一部を振り子バランスウェイトの収容空間間を設けるために切り取り、収容空間の軸方向の両側に支持部材の環状板を配置することが示されている。
Patent Document 1 shows a pendulum damper including a support member including two annular plates fixed to a rotor, and a plurality of pendulum balance weights arranged between the annular plates of the support member. The two annular plates have openings as guide tracks having an epicycloidal shape, and a guide roller is engaged with the pendulum balance weight. The end of the guide roller is guided by the openings of the two annular plates, so that the pendulum balance weight vibrates between the two annular plates that are the support members. Patent Document 1 also shows that in order to incorporate the pendulum damper into the rotor structure, a part of the assembly of sheet metal of the rotor is cut out to provide an accommodation space for the pendulum balance weight, and the annular plates of the support member are arranged on both axial sides of the accommodation space.
特許文献1では、複数の振り子バランスウェイトがロータ内の軸方向の一部領域に設けられる構造となっているので、トルクリップルによる振動、騒音の効果的な低減のために振り子バランスウェイトの重量を増すためには、ロータの容積を増やす必要があり、ロータおよび回転電機の小型化を推進する上で課題がある。
In Patent Document 1, multiple pendulum balance weights are provided in a portion of the axial area of the rotor, so in order to increase the weight of the pendulum balance weights to effectively reduce vibration and noise caused by torque ripple, it is necessary to increase the volume of the rotor, which poses a challenge in promoting the miniaturization of rotors and rotating electrical machines.
本開示は、上記に鑑みてなされたものであって、ロータの容積を増加させることなく、トルクリップルによる振動、騒音を抑制することが可能な回転電機を得ることを目的としている。
This disclosure was made in consideration of the above, and aims to provide a rotating electric machine that can suppress vibrations and noise caused by torque ripple without increasing the volume of the rotor.
上述した課題を解決し、目的を達成するために、本開示の回転電機は、ロータと、ステータと、を備える。ロータは、シャフト孔を有するロータコアと、ロータコアの外周部に設けられる複数の永久磁石と、シャフト孔と複数の永久磁石との間に設けられる複数の貫通孔と、両端部に凸部および凹部のうちの一方である第1ガイド体を有し、複数の貫通孔に挿入される複数の質量体と、ロータコアの両端に設けられ、凸部および凹部のうちの他方である複数の第2ガイド体を有する一対の端板と、を備える。第2ガイド体に対する第1ガイド体の摺動によってロータコアに対する質量体の揺動をガイドする。
In order to solve the above problems and achieve the object, the rotating electric machine of the present disclosure includes a rotor and a stator. The rotor includes a rotor core having a shaft hole, a plurality of permanent magnets provided on the outer periphery of the rotor core, a plurality of through holes provided between the shaft hole and the plurality of permanent magnets, a plurality of mass bodies having a first guide body which is one of a convex portion and a concave portion at both ends and inserted into the plurality of through holes, and a pair of end plates provided on both ends of the rotor core and having a plurality of second guide bodies which are the other of the convex portions and the concave portions. The oscillation of the mass bodies relative to the rotor core is guided by the sliding of the first guide body relative to the second guide body.
本開示の回転電機によれば、ロータの容積を増加させることなく、トルクリップルによる振動、騒音を抑制できる、という効果を奏する。
The rotating electric machine disclosed herein has the advantage of being able to suppress vibrations and noise caused by torque ripple without increasing the volume of the rotor.
以下、実施の形態にかかる回転電機を図面に基づいて詳細に説明する。
The rotating electric machine according to the embodiment will be described in detail below with reference to the drawings.
図1は、実施の形態1~4の回転電機を適用する電気自動車のドライブトレインの構成例を示すブロック図である。図1に示す電気自動車は、主要な構成要素として、回転電機としてのモータ1と、減速機2と、ドライブシャフト3と、ディファレンシャルギア4と、駆動輪5と、を備えている。モータ1は、振り子式ダンパの機能を有するロータを備える。
FIG. 1 is a block diagram showing an example of the configuration of a drive train of an electric vehicle to which the rotating electric machine of embodiments 1 to 4 is applied. The electric vehicle shown in FIG. 1 has, as its main components, a motor 1 as a rotating electric machine, a reduction gear 2, a drive shaft 3, a differential gear 4, and driving wheels 5. The motor 1 has a rotor that functions as a pendulum damper.
モータ1は、不図示のインバータから電力が供給されることによって回転し、モータトルクを発生する。モータ1は、三相交流の回転磁界でロータが回転する同期モータである。モータ1は、永久磁石が埋め込まれたロータと、電磁石で構成されたステータと、ステータおよびロータを収容する不図示のモータケースと、を有する。モータ1の出力側に配置された減速機2は、モータ1と駆動輪5との間でトルクを伝達する。減速機2は、動力伝達経路上で、モータ1と駆動輪5との間に設けられている。減速機2は、入力軸の回転数に対する出力軸の回転数の比率である変速比を適宜変更できる機構である。ディファレンシャルギア4は、2つの駆動輪5の回転数の差を検出し、減速機2のトルクを各駆動輪5に振り分けて伝える差動装置である。ディファレンシャルギア4は、減速機2から伝達されたトルクを駆動輪5に伝達する。駆動輪5は、駆動力源が出力する駆動トルクが伝達され、電気自動車の駆動力を発生する車輪である。
The motor 1 rotates by receiving power from an inverter (not shown) and generates motor torque. The motor 1 is a synchronous motor whose rotor rotates in a rotating magnetic field of three-phase AC. The motor 1 has a rotor with a permanent magnet embedded therein, a stator made of an electromagnet, and a motor case (not shown) that houses the stator and rotor. The reducer 2 arranged on the output side of the motor 1 transmits torque between the motor 1 and the drive wheels 5. The reducer 2 is provided between the motor 1 and the drive wheels 5 on the power transmission path. The reducer 2 is a mechanism that can appropriately change the gear ratio, which is the ratio of the rotation speed of the output shaft to the rotation speed of the input shaft. The differential gear 4 is a differential device that detects the difference in the rotation speed of the two drive wheels 5 and distributes and transmits the torque of the reducer 2 to each drive wheel 5. The differential gear 4 transmits the torque transmitted from the reducer 2 to the drive wheels 5. The drive wheels 5 are wheels to which the drive torque output by the drive power source is transmitted and which generate the drive force of the electric vehicle.
図2は、実施の形態1~4の回転電機の構成を示す平面図である。図3は、実施の形態1~4の回転電機の一部を拡大した構成を示す拡大平面図である。図2および図3は、実施の形態1~4に共通する構成部分を示している。モータ1は、ロータ6と、ステータ7と、を有する。ロータ6は、ステータ7の内部に配置される。モータ1から生じるトルクは、接続された減速機2で増幅および減衰し、駆動輪5に伝えられる。そのため、モータ1で生じるトルクリップルがドライブシャフト3に伝わり、電気自動車全体に振動および騒音が生じる。ロータ6は、ロータコア8、永久磁石9、端板、および振り子質量体を有する。端板および振り子質量体については、後述する。ロータコア8は、電磁鋼板の積層体で構成してもよいし、磁性粉体の加圧成型よりなる圧粉磁心など、他の材料を用いて構成してもよい。
FIG. 2 is a plan view showing the configuration of the rotating electric machine of the first to fourth embodiments. FIG. 3 is an enlarged plan view showing the configuration of a part of the rotating electric machine of the first to fourth embodiments. FIG. 2 and FIG. 3 show the components common to the first to fourth embodiments. The motor 1 has a rotor 6 and a stator 7. The rotor 6 is arranged inside the stator 7. The torque generated by the motor 1 is amplified and attenuated by the connected reducer 2 and transmitted to the drive wheels 5. Therefore, the torque ripple generated by the motor 1 is transmitted to the drive shaft 3, causing vibration and noise in the entire electric vehicle. The rotor 6 has a rotor core 8, a permanent magnet 9, an end plate, and a pendulum mass body. The end plate and the pendulum mass body will be described later. The rotor core 8 may be made of a laminate of electromagnetic steel sheets, or may be made of other materials such as a powder core made by pressure molding of magnetic powder.
モータ1は、ロータコア8の内部に永久磁石9を埋め込んだ埋め込み磁石同期モータ(IPMSM:Interior Permanent Magnet Synchronous Motor)である。そのため、ロータコア8の外周部には、複数の永久磁石9を埋め込むための複数の磁石挿入孔10が設けられている。ロータコア8には、モータ1と減速機2とを接続する不図示のシャフトを貫通させるシャフト孔12が設けられている。また、ロータコア8には、ロータコア8と永久磁石9に生じる遠心力に耐える強度を保ちながら、ロータコア8の軽量化と磁束密度の向上を図るための貫通孔である複数の軽量化孔11が設けられる。複数の軽量化孔11は、複数の永久磁石9とシャフト孔12との間に設けられている。各軽量化孔11は、貫通された孔である。ロータコア8の磁極間で周方向に隣接する2つの永久磁石9の間には、図3に示すように、ロータコア8の外周面から径方向内側へ延びる磁極間ブリッジ13と、磁束短絡防止用の空隙である磁極間空隙部(フラックスバリア)14と、を備える。磁極間空隙部14は、磁石挿入孔10に形成された空隙であり、磁極間空隙部14の先端部は、例えば半楕円形状15となって丸くなっている。
The motor 1 is an interior permanent magnet synchronous motor (IPMSM) with permanent magnets 9 embedded inside the rotor core 8. For this reason, the rotor core 8 has a plurality of magnet insertion holes 10 for embedding the plurality of permanent magnets 9 on its outer periphery. The rotor core 8 has a shaft hole 12 through which a shaft (not shown) that connects the motor 1 and the reducer 2 passes. The rotor core 8 also has a plurality of weight reduction holes 11, which are through holes for reducing the weight of the rotor core 8 and improving the magnetic flux density while maintaining the strength to withstand the centrifugal force generated in the rotor core 8 and the permanent magnets 9. The weight reduction holes 11 are provided between the plurality of permanent magnets 9 and the shaft hole 12. Each weight reduction hole 11 is a through hole. As shown in FIG. 3, between the two circumferentially adjacent permanent magnets 9 between the magnetic poles of the rotor core 8, there is an interpole bridge 13 extending radially inward from the outer circumferential surface of the rotor core 8, and an interpole gap (flux barrier) 14, which is a gap for preventing magnetic flux short circuits. The interpole gap 14 is a gap formed in the magnet insertion hole 10, and the tip of the interpole gap 14 is rounded, for example, in a semi-elliptical shape 15.
実施の形態1.
図4は、実施の形態1の回転電機のロータ6の構成を示す斜視図である。図5は、実施の形態1の回転電機のロータ6の一部を拡大した構成を示す拡大図である。図5は、図4のV部を拡大して示している。図6は、実施の形態1の回転電機のロータコア8の構成を示す平面図である。図7は、実施の形態1の回転電機の振り子質量体17の構成を示す斜視図である。Embodiment 1.
Fig. 4 is a perspective view showing the configuration of therotor 6 of the rotating electric machine according to the first embodiment. Fig. 5 is an enlarged view showing the configuration of a part of the rotor 6 of the rotating electric machine according to the first embodiment. Fig. 5 shows an enlarged view of the V part of Fig. 4. Fig. 6 is a plan view showing the configuration of the rotor core 8 of the rotating electric machine according to the first embodiment. Fig. 7 is a perspective view showing the configuration of the pendulum mass body 17 of the rotating electric machine according to the first embodiment.
図4は、実施の形態1の回転電機のロータ6の構成を示す斜視図である。図5は、実施の形態1の回転電機のロータ6の一部を拡大した構成を示す拡大図である。図5は、図4のV部を拡大して示している。図6は、実施の形態1の回転電機のロータコア8の構成を示す平面図である。図7は、実施の形態1の回転電機の振り子質量体17の構成を示す斜視図である。
Fig. 4 is a perspective view showing the configuration of the
図4に示すように、ロータ6は、ロータコア8と、一対の端板16と、を有する。ロータコア8および永久磁石9の位置ずれを防止し、かつロータコア8の回転バランスを確保するために、端板16がロータコア8の両端部に配置されている。端板16には、シャフトを貫通するためのシャフト孔20が設けられており、シャフト孔20の内径はロータコア8のシャフト孔12の内径と一致する。回転によってシャフトとロータコア8および端板16とが分離しないように、これらの構成要素に関しては圧入による固定がなされているが、キー構造で固定してもよい。
As shown in FIG. 4, the rotor 6 has a rotor core 8 and a pair of end plates 16. The end plates 16 are disposed at both ends of the rotor core 8 to prevent misalignment of the rotor core 8 and the permanent magnets 9 and to ensure the rotational balance of the rotor core 8. The end plates 16 are provided with a shaft hole 20 for passing the shaft through, and the inner diameter of the shaft hole 20 matches the inner diameter of the shaft hole 12 of the rotor core 8. To prevent the shaft from being separated from the rotor core 8 and the end plates 16 due to rotation, these components are fixed by press fitting, but they may also be fixed with a key structure.
端板16は、磁束への影響を抑えるために非磁性体で作製されている。端板16には、ロータコア8に設けられる振り子質量体17(後述する)の揺動軌道を定めるための第2ガイド体としてのガイド穴19を備える。図4の場合は、ガイド穴19は、貫通孔である。ガイド穴19は、貫通していない有底穴としてもよい。貫通孔および有底穴を含めて凹部と呼称する。ガイド穴19は、端板16の周方向に沿って複数個配置されている。具体的には、ガイド穴19は、図5に示す2個を1組として、複数組配置されている。
The end plate 16 is made of a non-magnetic material to reduce the effect on the magnetic flux. The end plate 16 has a guide hole 19 as a second guide body for determining the swing trajectory of the pendulum mass body 17 (described later) provided in the rotor core 8. In the case of FIG. 4, the guide hole 19 is a through hole. The guide hole 19 may also be a blind hole with a bottom. Through holes and blind holes are collectively referred to as a recess. A plurality of guide holes 19 are arranged along the circumferential direction of the end plate 16. Specifically, the guide holes 19 are arranged in multiple sets of two as shown in FIG. 5.
図6に示すように、ロータコア8の軽量化孔11には、振り子質量体17が埋め込まれている。振り子質量体17を単に質量体17とも呼ぶ。図7に示すように、質量体17は、錘部21および突起18を備える。錘部21は、例えば、貫通孔である軽量化孔11の軸方向の全長に亘る長さを有している。軽量化孔11に挿入される質量体17の両端部には、端板16のガイド穴19で揺動軌道を拘束するための、第1ガイド体としての突起18を有している。凸部である突起18は、錘部21に固定されており、例えば円筒形状を呈している。突起18としては、六角柱などの他の任意形状を呈してもよい。また、突起18は、固定軸としてもよいし、空転可能な中心軸を有するようにしてもよい。
As shown in FIG. 6, a pendulum mass 17 is embedded in the weight reduction hole 11 of the rotor core 8. The pendulum mass 17 is also simply called the mass 17. As shown in FIG. 7, the mass 17 includes a weight portion 21 and a protrusion 18. The weight portion 21 has a length that is, for example, the entire axial length of the weight reduction hole 11, which is a through hole. Both ends of the mass 17 inserted into the weight reduction hole 11 have protrusions 18 as first guide bodies for restraining the swing trajectory in the guide hole 19 of the end plate 16. The protrusion 18, which is a convex portion, is fixed to the weight portion 21 and has, for example, a cylindrical shape. The protrusion 18 may have any other shape, such as a hexagonal column. The protrusion 18 may also have a fixed axis or a central axis that can rotate freely.
図5~図7に示すように、質量体17が質量体17の軸中心に回転運動することを抑制し、質量体17の摺動を促すため、突起18が1つの質量体17あたりに片側2本ずつ備えられている。また、片側に2つの突起18を有する質量体17と対になる、2個1組のガイド穴19が端板16に質量体17と同数個、円周方向に配置される。また、2個1組のガイド穴19は、これら2個1組のガイド穴19の中心を通る径方向の直線に対し鏡面対称となるように配置される。なお、質量体17の軸を中心とした質量体17の回転を許容する場合においては、突起18が1つの質量体17あたりに片側1本ずつ配置されていてもよい。また、前述の回転を許容する場合においては、突起18の断面は円形状に限らず、任意の曲線または多角形でもよい。
As shown in Figs. 5 to 7, two protrusions 18 are provided on each side of each mass body 17 to suppress rotational movement of the mass body 17 around its axis and promote sliding of the mass body 17. Also, pairs of guide holes 19, which are paired with the mass body 17 having two protrusions 18 on one side, are arranged in the circumferential direction on the end plate 16 in the same number as the mass body 17. Also, the pair of guide holes 19 are arranged so as to be mirror-symmetrical with respect to a radial line passing through the center of the pair of guide holes 19. Note that, in the case where rotation of the mass body 17 around the axis of the mass body 17 is permitted, one protrusion 18 may be arranged on each side of each mass body 17. Also, in the case where the above-mentioned rotation is permitted, the cross section of the protrusions 18 is not limited to a circular shape, and may be any curved or polygonal shape.
図8は、実施の形態1の回転電機の軽量化孔11と質量体17との位置関係を示す平面図である。図7、図8に示すように、質量体17の錘部21の断面形状は、軽量化孔11の断面形状に対し相似な形状としている。これは、質量体17のイナーシャを大きくとるためである。質量体17をどのような形状にするにしても、図8に示すように、質量体17が軌道上のすべての位置で、ロータコア8の軽量化孔11の内壁との間に隙間gapが生じるように、錘部21および軽量化孔11の断面形状などを設定する。質量体17と軽量化孔11の内壁との間に隙間がない場合、衝突により生じる非線形挙動により、所望の制振効果が得られなくなるだけでなく、異音が生じて、ロータコア8が変形する場合がある。
FIG. 8 is a plan view showing the positional relationship between the weight reduction hole 11 and the mass body 17 of the rotating electric machine of the first embodiment. As shown in FIGS. 7 and 8, the cross-sectional shape of the weight portion 21 of the mass body 17 is similar to the cross-sectional shape of the weight reduction hole 11. This is to increase the inertia of the mass body 17. Whatever the shape of the mass body 17, the cross-sectional shapes of the weight portion 21 and the weight reduction hole 11 are set so that a gap is generated between the mass body 17 and the inner wall of the weight reduction hole 11 of the rotor core 8 at all positions on the orbit, as shown in FIG. 8. If there is no gap between the mass body 17 and the inner wall of the weight reduction hole 11, not only will the desired vibration damping effect not be obtained due to nonlinear behavior caused by a collision, but abnormal noise may also be generated and the rotor core 8 may be deformed.
質量体17の錘部21の軸長L1は、ロータコア8の軸長Lrより短く設定し、突起18を含む振り子質量体17の全長Ltは、ロータコア8の軸長Lrとその両端に接続された端板16の厚みLpとの合計長であるLr+2Lpと同等より若干小さく設計することが望ましい。このようにすることで、減速機2およびモータケースなどとの干渉を防止している。
The axial length L1 of the weight portion 21 of the mass body 17 is set shorter than the axial length Lr of the rotor core 8, and the overall length Lt of the pendulum mass body 17 including the protrusions 18 is desirably designed to be slightly smaller than Lr + 2Lp, which is the total length of the axial length Lr of the rotor core 8 and the thickness Lp of the end plates 16 connected to both ends of the rotor core 8. This prevents interference with the reducer 2, the motor case, etc.
質量体17は、磁束への影響を抑えるために非磁性体で作製されている。質量体17は磁性体(導体)であってもよく、その場合は電磁誘導の働きにより、磁束密度の高い位置に質量体17が移動したとき、減衰効果が働き、錘部21に過大な変位量が発生することを抑制し、突起18がガイド穴19の端部で接触する際に生じる異音を抑制する効果がある。
The mass body 17 is made of a non-magnetic material to reduce its effect on the magnetic flux. The mass body 17 may be a magnetic material (conductor), in which case, when the mass body 17 moves to a position of high magnetic flux density due to electromagnetic induction, a damping effect is generated, preventing excessive displacement of the weight portion 21 and reducing abnormal noise that occurs when the protrusion 18 comes into contact with the end of the guide hole 19.
質量体17の揺動軌道の軌道半径は、モータ1の極対数に応じたコギングトルク、またはトルクリップル振動を引き起こす回転次数によって定まる。質量体17の揺動軌道は、円軌道でもよいし、振り子の不安定挙動を防止するために高次関数で定められてもよい。質量体17の揺動軌道が円軌道である場合、三相交流同期モータで構成される回転電機において、振動吸振器としての効果を発する有効回転次数が、永久磁石9の極対数Nと三相交流同期モータの主要なトルクリップルの周波数成分である6次の周波数成分とを掛け合わせた周波数と一致するよう、質量体17の揺動軌道の回転半径Lおよび質量体17の揺動軌道の回転中心とロータコア8の中心との距離Rを設定する。すなわち、回転半径Lおよび距離Rを、ロータコア8の内部に埋め込まれた永久磁石9の極対数Nによって定まる等式R/L=(6N)2に従って定めることで、回転6次成分をもつとされる三相交流同期モータのトルクリップルによるねじり振動を抑制可能である。このように、振り子の固有振動数を駆動系のねじり振動の共振点と一致させること、つまり三相交流同期モータに生じるトルクリップルの周波数成分である6×(極対数N)における振動を抑制することで、ロータ6の回転数に依存する共振点を回避することが可能となる。
The orbit radius of the swing orbit of the mass body 17 is determined by the order of rotation that causes the cogging torque or torque ripple vibration according to the number of pole pairs of the motor 1. The swing orbit of the mass body 17 may be a circular orbit, or may be determined by a higher order function to prevent unstable behavior of the pendulum. When the swing orbit of the mass body 17 is a circular orbit, the rotation radius L of the swing orbit of the mass body 17 and the distance R between the center of rotation of the swing orbit of the mass body 17 and the center of the rotor core 8 are set so that the effective rotation order that produces the effect as a vibration absorber in a rotating electric machine composed of a three-phase AC synchronous motor coincides with the frequency obtained by multiplying the number of pole pairs N of the permanent magnet 9 by the sixth order frequency component that is the main frequency component of the torque ripple of the three-phase AC synchronous motor. In other words, by determining the rotation radius L and the distance R according to the equation R/L=(6N) 2 that is determined by the number of pole pairs N of the permanent magnet 9 embedded inside the rotor core 8, it is possible to suppress the torsional vibration caused by the torque ripple of the three-phase AC synchronous motor that is considered to have the sixth order rotation component. In this way, by matching the natural frequency of the pendulum with the resonance point of the torsional vibration of the drive system, in other words, by suppressing the vibration at 6 × (number of pole pairs N), which is the frequency component of the torque ripple generated in the three-phase AC synchronous motor, it is possible to avoid the resonance point that depends on the rotation speed of the rotor 6.
なお、コギングは、モータ1の非通電時にロータコア8と永久磁石9との間に生じる磁界に起因した脈動トルクであり、その大きさはモータ1の通電時の電流にかかわらず一定であり、一般にモータ1の回転数が低いほど大きくなり、回転数を高くするとロータコア8に働く慣性力が大きくなることで、相対的に脈動トルクが小さくなることが知られている。また、トルクリップルは、モータ1の通電時に永久磁石9の界磁磁束とコイルの電流によって生じる電磁トルクの変動分に相当し、その大きさは電流に比例するとされている。
Cogging is a pulsating torque caused by the magnetic field generated between the rotor core 8 and permanent magnets 9 when the motor 1 is not energized, and its magnitude is constant regardless of the current when the motor 1 is energized. It is generally known that the lower the rotation speed of the motor 1, the greater the pulsating torque becomes, and that increasing the rotation speed increases the inertial force acting on the rotor core 8, resulting in a relatively smaller pulsating torque. Torque ripple corresponds to the fluctuation in electromagnetic torque generated by the field flux of the permanent magnets 9 and the current in the coil when the motor 1 is energized, and its magnitude is said to be proportional to the current.
また、軽量化孔11の中心はd軸またはq軸上と重なる位置であり、かつ、永久磁石9が挿入される磁石挿入孔10に干渉しない位置に設けられる。軽量化孔11の中心がd軸またはq軸上に位置しない場合、鎖交磁束の分布がd軸およびq軸に対して非対称となるので、磁束の空間高調波成分が増加する。これにより、鉄損、径方向電磁力、トルクリップルが増加する。それらを防止するため、軽量化孔11の中心をd軸またはq軸上と重なる位置に配置している。
In addition, the center of the weight reduction hole 11 is located at a position that overlaps with the d-axis or q-axis, and is located at a position that does not interfere with the magnet insertion hole 10 into which the permanent magnet 9 is inserted. If the center of the weight reduction hole 11 is not located on the d-axis or q-axis, the distribution of the interlinkage magnetic flux becomes asymmetric with respect to the d-axis and q-axis, and the spatial harmonic components of the magnetic flux increase. This increases iron loss, radial electromagnetic force, and torque ripple. To prevent this, the center of the weight reduction hole 11 is located at a position that overlaps with the d-axis or q-axis.
このように、実施の形態1によれば、ロータコア8に貫通孔である軽量化孔11を設け、ロータコア8を貫通するように質量体17を配置し、質量体17の両端部に第1ガイド体としての突起18を設け、端板16に第2ガイド体としてのガイド穴19を設け、ガイド穴19に対する突起18の摺動によってロータコア8に対する質量体17の揺動をガイドするようにしたので、ロータ6の容積を増加させることなく、トルクリップルによる振動、騒音を抑制できる。
In this way, according to the first embodiment, the rotor core 8 is provided with the weight-reducing holes 11, which are through holes, the mass body 17 is arranged so as to penetrate the rotor core 8, protrusions 18 are provided at both ends of the mass body 17 as first guide bodies, and the end plate 16 is provided with guide holes 19 as second guide bodies, and the sliding of the protrusions 18 relative to the guide holes 19 guides the oscillation of the mass body 17 relative to the rotor core 8. This makes it possible to suppress vibrations and noise due to torque ripple without increasing the volume of the rotor 6.
実施の形態2.
図9は、実施の形態2の回転電機のロータコア8の構成を示す平面図である。図10は、実施の形態2の回転電機の端板32の構成を示す斜視図である。実施の形態2では、実施の形態1の質量体17を質量体30に置換し、実施の形態1の端板16を端板32に置換している。実施の形態2におけるそれ以外の構成は、実施の形態1と同様であり、重複する説明は省略する。Embodiment 2.
Fig. 9 is a plan view showing the configuration ofrotor core 8 of a rotating electric machine according to embodiment 2. Fig. 10 is a perspective view showing the configuration of an end plate 32 of a rotating electric machine according to embodiment 2. In embodiment 2, mass body 17 of embodiment 1 is replaced with mass body 30, and end plate 16 of embodiment 1 is replaced with end plate 32. Other configurations in embodiment 2 are similar to those in embodiment 1, and repeated explanations will be omitted.
図9は、実施の形態2の回転電機のロータコア8の構成を示す平面図である。図10は、実施の形態2の回転電機の端板32の構成を示す斜視図である。実施の形態2では、実施の形態1の質量体17を質量体30に置換し、実施の形態1の端板16を端板32に置換している。実施の形態2におけるそれ以外の構成は、実施の形態1と同様であり、重複する説明は省略する。
Fig. 9 is a plan view showing the configuration of
実施の形態2では、図9に示すように、各質量体30の両端部に揺動軌道を規定する凹部であるガイド溝31が設けられている。ガイド溝31が第1ガイド体に対応する。また、図10に示すように、各端板32に凸部である突起33が複数個、周方向に間欠的に設けられている。突起33が第2ガイド体に対応する。実施の形態2では、各ガイド溝31に対応して1個ずつの突起33が設けられ、各ガイド溝31内で各突起33が摺動する。
In embodiment 2, as shown in FIG. 9, guide grooves 31, which are recesses that define the swing trajectory, are provided at both ends of each mass body 30. The guide grooves 31 correspond to the first guide body. Also, as shown in FIG. 10, a plurality of protrusions 33, which are convex portions, are provided intermittently in the circumferential direction on each end plate 32. The protrusions 33 correspond to the second guide body. In embodiment 2, one protrusion 33 is provided corresponding to each guide groove 31, and each protrusion 33 slides within each guide groove 31.
本構成によると、質量体30は摺動すると同時に突起33の軸を中心に回転する。また、突起33の軸中心は、質量体30の重心(中心)からずれた位置にあり偏心している。ガイド溝31が、質量体30の中心位置より径方向の外側に設けられた場合、質量体30が軸中心に回転すると、質量体30が軽量化孔11の内壁に衝突する可能性がある。それを防止するため、実施の形態2によれば、ガイド溝31は、質量体30の中心位置より径方向の内側に設けている。
In this configuration, the mass body 30 slides and at the same time rotates around the axis of the protrusion 33. The axial center of the protrusion 33 is eccentric and offset from the center of gravity (center) of the mass body 30. If the guide groove 31 is provided radially outward from the center position of the mass body 30, there is a possibility that the mass body 30 will collide with the inner wall of the weight reduction hole 11 when it rotates around its axis. To prevent this, according to embodiment 2, the guide groove 31 is provided radially inward from the center position of the mass body 30.
実施の形態2によれば、ガイド溝31を質量体30の中心位置より径方向の内側に設けているので、各ガイド溝31に対応して1個ずつの突起33が設けられている場合でも、質量体30の回転による軽量化孔11への干渉を防止することができる。
According to the second embodiment, the guide grooves 31 are provided radially inward from the center position of the mass body 30, so that even if one protrusion 33 is provided corresponding to each guide groove 31, interference with the weight reduction hole 11 due to rotation of the mass body 30 can be prevented.
実施の形態3.
図11は、実施の形態3の回転電機の振り子質量体41の構成を示す斜視図である。図12は、実施の形態3の回転電機の端板46の構成を示す斜視図である。図11に示すように、振り子質量体41は、両端部に第1凸部としての突起42aを有する錘部43aを備える第1質量体41aと、両端部に第2凸部としての突起42bを有する錘部43bを備える第2質量体41bと、突起42aと突起42bとを連結する連結部材45と、を備える。第1質量体41aは、第1貫通孔としての軽量化孔11に挿入され、第2質量体41bは、第2貫通孔としての軽量化孔11に挿入される。 Embodiment 3.
Fig. 11 is a perspective view showing a configuration of apendulum mass body 41 of a rotating electric machine according to the third embodiment. Fig. 12 is a perspective view showing a configuration of an end plate 46 of a rotating electric machine according to the third embodiment. As shown in Fig. 11, the pendulum mass body 41 includes a first mass body 41a including a weight portion 43a having projections 42a as first projections at both ends, a second mass body 41b including a weight portion 43b having projections 42b as second projections at both ends, and a connecting member 45 connecting the projections 42a and 42b. The first mass body 41a is inserted into the weight reduction hole 11 as a first through hole, and the second mass body 41b is inserted into the weight reduction hole 11 as a second through hole.
図11は、実施の形態3の回転電機の振り子質量体41の構成を示す斜視図である。図12は、実施の形態3の回転電機の端板46の構成を示す斜視図である。図11に示すように、振り子質量体41は、両端部に第1凸部としての突起42aを有する錘部43aを備える第1質量体41aと、両端部に第2凸部としての突起42bを有する錘部43bを備える第2質量体41bと、突起42aと突起42bとを連結する連結部材45と、を備える。第1質量体41aは、第1貫通孔としての軽量化孔11に挿入され、第2質量体41bは、第2貫通孔としての軽量化孔11に挿入される。 Embodiment 3.
Fig. 11 is a perspective view showing a configuration of a
図12に示すように、端板46には、振り子質量体41の2つの突起42a,42bをガイドする貫通孔である2つのガイド穴47と、2つのガイド穴47を繋ぎ、振り子質量体41の連結部材45を収容する第3凹部としての凹部48とが形成されている。2つのガイド穴47の一方が第1凹部に対応し、他方が第2凹部に対応する。端板46には、4つの振り子質量体41を支持するために、2つのガイド穴47および凹部48を有する構成が4組設けられている。実施の形態3におけるそれ以外の構成は、実施の形態1と同様であり、重複する説明は省略する。なお、振り子質量体41においては、3つ以上の錘部を連結してもよい。実施の形態3における軽量化孔11については、図示を省略したが、実施の形態1の軽量化孔11と同様、錘部43a,43bの断面形状と相似な形状としたほうが望ましい。
As shown in FIG. 12, the end plate 46 is formed with two guide holes 47, which are through holes that guide the two protrusions 42a and 42b of the pendulum mass body 41, and a recess 48 that connects the two guide holes 47 and serves as a third recess that accommodates the connecting member 45 of the pendulum mass body 41. One of the two guide holes 47 corresponds to the first recess, and the other corresponds to the second recess. The end plate 46 is provided with four sets of configurations having two guide holes 47 and recesses 48 in order to support the four pendulum mass bodies 41. The other configurations in the third embodiment are the same as those in the first embodiment, and redundant explanations will be omitted. Note that three or more weights may be connected to the pendulum mass body 41. Although the lightening hole 11 in the third embodiment is not shown, it is preferable that the lightening hole 11 has a shape similar to the cross-sectional shape of the weights 43a and 43b, as in the lightening hole 11 in the first embodiment.
本構成では、第1質量体41aの突起42aと第2質量体41bの突起42bとが連結部材45により連結されることで、単体の振り子質量体41を構成する。連結部材45は、第1質量体41aおよび第2質量体41bの各突起42a,42bの先端部同士を連結している。連結部材45は、質量体41が突起42a,42bを軸にして回転することを妨げる作用がある。また、図4、図8に示すように、1つの軽量化孔11に対応して2つのガイド穴19を配置できる場合は、質量体41の回転を防止できるが、1つの軽量化孔11に対応して1つのガイド穴19しか配置できない場合でも、本構成によれば、質量体41の回転を防止でき、質量体41の摺動を促すことができる。
In this configuration, the protrusion 42a of the first mass 41a and the protrusion 42b of the second mass 41b are connected by a connecting member 45 to form a single pendulum mass 41. The connecting member 45 connects the tips of the protrusions 42a and 42b of the first mass 41a and the second mass 41b. The connecting member 45 has the effect of preventing the mass 41 from rotating around the protrusions 42a and 42b. Furthermore, as shown in Figures 4 and 8, if two guide holes 19 can be arranged corresponding to one weight reduction hole 11, the mass 41 can be prevented from rotating. However, even if only one guide hole 19 can be arranged corresponding to one weight reduction hole 11, this configuration can prevent the mass 41 from rotating and promote the sliding of the mass 41.
また、端板46に凹部48を設けているので、連結部材45が露出することを防止することができる。一対のガイド穴47は、一対のガイド穴47の中間を通る径方向の直線に対し鏡面対称に配置される。それにより、2つの突起42a,42bの軸の位置関係が固定された状態での質量体41の振り子運動が可能になる。
In addition, the recess 48 is provided in the end plate 46, so that the connecting member 45 can be prevented from being exposed. The pair of guide holes 47 are arranged in mirror symmetry with respect to a radial line that passes through the middle of the pair of guide holes 47. This allows the mass body 41 to perform pendulum motion with the positional relationship of the axes of the two protrusions 42a, 42b fixed.
実施の形態3によれば、連結部材45によって第1質量体41aおよび第2質量体41bを連結して、振り子質量体41を構成しているので、質量体41の回転を防止でき、質量体41の摺動を促進することができる。
According to the third embodiment, the pendulum mass 41 is formed by connecting the first mass 41a and the second mass 41b with the connecting member 45, which prevents the mass 41 from rotating and promotes the sliding of the mass 41.
実施の形態4.
図13は、実施の形態4の回転電機のロータ6の構成を示す斜視図である。図14は、実施の形態4の回転電機の一方の端板51のロータコア8に面する裏面の構成を示す斜視図である。図15は、実施の形態4の回転電機の他方の端板56のおもて面の構成を示す斜視図である。図16は、実施の形態4の回転電機の一方の端板51の裏面の一部構成を示す平面図である。実施の形態4においては、実施の形態2の回転電機の一方の端板32を端板51に置換し、実施の形態2の回転電機の他方の端板32を端板56に置換している。実施の形態4におけるそれ以外の構成は、実施の形態2と同様であり、重複する説明は省略する。すなわち、図13~図16の回転電機においては、端板51,56に、複数の突起52を周方向に配置し、図13に示すロータコア8に、図9に示した複数の軽量化孔11、ガイド溝31を有する複数の質量体30が設けられている。このように、実施の形態4の突起52は、実施の形態2の突起33に対応している。 Embodiment 4.
FIG. 13 is a perspective view showing the configuration of therotor 6 of the rotating electric machine of the fourth embodiment. FIG. 14 is a perspective view showing the configuration of the back surface of one end plate 51 of the rotating electric machine of the fourth embodiment, which faces the rotor core 8. FIG. 15 is a perspective view showing the configuration of the front surface of the other end plate 56 of the rotating electric machine of the fourth embodiment. FIG. 16 is a plan view showing a partial configuration of the back surface of one end plate 51 of the rotating electric machine of the fourth embodiment. In the fourth embodiment, one end plate 32 of the rotating electric machine of the second embodiment is replaced with an end plate 51, and the other end plate 32 of the rotating electric machine of the second embodiment is replaced with an end plate 56. The other configurations in the fourth embodiment are the same as those in the second embodiment, and redundant explanations will be omitted. That is, in the rotating electric machine of FIGS. 13 to 16, a plurality of protrusions 52 are arranged in the circumferential direction on the end plates 51 and 56, and a plurality of mass bodies 30 having a plurality of weight-reducing holes 11 and guide grooves 31 shown in FIG. 9 are provided in the rotor core 8 shown in FIG. In this way, the protrusions 52 in the fourth embodiment correspond to the protrusions 33 in the second embodiment.
図13は、実施の形態4の回転電機のロータ6の構成を示す斜視図である。図14は、実施の形態4の回転電機の一方の端板51のロータコア8に面する裏面の構成を示す斜視図である。図15は、実施の形態4の回転電機の他方の端板56のおもて面の構成を示す斜視図である。図16は、実施の形態4の回転電機の一方の端板51の裏面の一部構成を示す平面図である。実施の形態4においては、実施の形態2の回転電機の一方の端板32を端板51に置換し、実施の形態2の回転電機の他方の端板32を端板56に置換している。実施の形態4におけるそれ以外の構成は、実施の形態2と同様であり、重複する説明は省略する。すなわち、図13~図16の回転電機においては、端板51,56に、複数の突起52を周方向に配置し、図13に示すロータコア8に、図9に示した複数の軽量化孔11、ガイド溝31を有する複数の質量体30が設けられている。このように、実施の形態4の突起52は、実施の形態2の突起33に対応している。 Embodiment 4.
FIG. 13 is a perspective view showing the configuration of the
図13に示すように、ロータコア8の一方の端部には端板51が配置され、ロータコア8の他方の端部には端板56が配置されている。端板51は、潤滑油を突起52およびガイド溝31に供給するための流路53を有し、端板56は端板51から供給された潤滑油を排出する排出孔57,58を有する。潤滑油には、潤滑剤の他に冷却材が含まれてもよい。
As shown in FIG. 13, an end plate 51 is disposed at one end of the rotor core 8, and an end plate 56 is disposed at the other end of the rotor core 8. The end plate 51 has a flow path 53 for supplying lubricating oil to the protrusions 52 and the guide grooves 31, and the end plate 56 has discharge holes 57, 58 for discharging the lubricating oil supplied from the end plate 51. The lubricating oil may contain a coolant in addition to the lubricant.
図14に示すように、端板51の裏面に、油溝としての流路53が形成されている。流路53は、ガイド溝31と係合する突起52の接触摩擦を低減させ、ロータコア8を全体的に冷却する潤滑油を流す。流路53は、端板51の内周側のシャフト孔20から突起52まで延びる複数の溝53aと、突起52から分岐して端板51の外周部まで延びる複数の溝53bと、を有する。複数の溝53bの端部は、ロータコア8に形成された磁極間空隙部14に対応する位置に設けられている。シャフト孔20から流入した潤滑油は、図16の矢印で示すように、複数の溝53aを経由して、突起52およびガイド溝31に流れ込み、一部は質量体30が挿入されたロータコア8の軽量化孔11の内部に流れ込む。それ以外の潤滑油は、図16の矢印で示すように、分岐しながら溝53bを流れて溝53bの先端部55に到達し、その後ロータコア8の磁極間空隙部14に流れ込む。
As shown in FIG. 14, a flow path 53 is formed on the back surface of the end plate 51 as an oil groove. The flow path 53 reduces the contact friction of the protrusions 52 engaging with the guide grooves 31, and allows the flow of lubricating oil that cools the rotor core 8 as a whole. The flow path 53 has a plurality of grooves 53a extending from the shaft hole 20 on the inner periphery side of the end plate 51 to the protrusions 52, and a plurality of grooves 53b branching from the protrusions 52 and extending to the outer periphery of the end plate 51. The ends of the plurality of grooves 53b are provided at positions corresponding to the inter-pole gaps 14 formed in the rotor core 8. The lubricating oil that flows in from the shaft hole 20 flows into the protrusions 52 and guide grooves 31 via the plurality of grooves 53a, as shown by the arrows in FIG. 16, and a portion of the lubricating oil flows into the inside of the weight reduction hole 11 of the rotor core 8 into which the mass body 30 is inserted. The remaining lubricating oil flows through groove 53b while branching, as shown by the arrows in Figure 16, and reaches tip 55 of groove 53b, and then flows into inter-pole gap 14 of rotor core 8.
図13、図15に示すように、端板56は、ロータコア8の複数の軽量化孔11に対応する位置に設けられる複数の排出孔57と、ロータコア8の複数の磁極間空隙部14に対応する位置に設けられる複数の排出孔58と、を有する。片側の端板51からロータコア8の軽量化孔11に流れ込んだ潤滑油は、端板56の排出孔57から排出される。また、片側の端板51からロータコア8の磁極間空隙部14に流れ込んだ潤滑油は、端板56の排出孔58から排出される。
As shown in Figures 13 and 15, the end plate 56 has a plurality of discharge holes 57 provided at positions corresponding to the plurality of weight reduction holes 11 of the rotor core 8, and a plurality of discharge holes 58 provided at positions corresponding to the plurality of inter-pole gaps 14 of the rotor core 8. The lubricating oil that flows into the weight reduction holes 11 of the rotor core 8 from the end plate 51 on one side is discharged from the discharge holes 57 of the end plate 56. In addition, the lubricating oil that flows into the inter-pole gaps 14 of the rotor core 8 from the end plate 51 on one side is discharged from the discharge holes 58 of the end plate 56.
ロータコア8の回転にともない、軽量化孔11内部の潤滑油は遠心力を受け、径方向外側の内壁から流れ出る。そのため、効率的な排出のために排出孔57は軽量化孔11の径方向外側に配置されることが望ましい。上記構成では、潤滑油をロータコア8の径方向外側に排出したが、潤滑油をシャフト孔20側へ回収する流路構成としてもよい。
As the rotor core 8 rotates, the lubricating oil inside the weight reduction hole 11 is subjected to centrifugal force and flows out from the radially outer inner wall. Therefore, for efficient discharge, it is desirable to position the discharge hole 57 radially outward of the weight reduction hole 11. In the above configuration, the lubricating oil is discharged radially outward of the rotor core 8, but the flow path configuration may also be such that the lubricating oil is recovered toward the shaft hole 20.
実施の形態4によれば、ガイド溝31および突起52に摩擦熱を散逸させる潤滑油を供給する油溝を設けるようにしているので、ガイド溝31と突起52との摩擦熱が低減され、質量体30の円滑な揺動運動が促進される。
According to the fourth embodiment, an oil groove is provided to supply lubricating oil to the guide groove 31 and the protrusion 52 to dissipate frictional heat, thereby reducing frictional heat between the guide groove 31 and the protrusion 52 and promoting smooth rocking motion of the mass body 30.
以上の実施の形態に示した構成は、本開示の内容の一例を示すものであり、別の公知の技術と組み合わせることも可能であるし、本開示の要旨を逸脱しない範囲で、構成の一部を省略、変更することも可能である。
The configurations shown in the above embodiments are merely examples of the contents of this disclosure, and may be combined with other known technologies. Parts of the configurations may be omitted or modified without departing from the spirit of this disclosure.
1 モータ、2 減速機、3 ドライブシャフト、4 ディファレンシャルギア、5 駆動輪、6 ロータ、7 ステータ、8 ロータコア、9 永久磁石、10 磁石挿入孔、11 軽量化孔、12,20 シャフト孔、13 磁極間ブリッジ、14 磁極間空隙部、15 半楕円形状、16,32,46,51,56 端板、17,30,41 振り子質量体(質量体)、18,33,42a,42b,52 突起、19,47 ガイド穴、21,43a,43b 錘部、31 ガイド溝、41a 第1質量体、41b 第2質量体、45 連結部材、48 凹部、53 流路、53a,53b 溝、55 先端部、57,58 排出孔。
1 motor, 2 reducer, 3 drive shaft, 4 differential gear, 5 drive wheel, 6 rotor, 7 stator, 8 rotor core, 9 permanent magnet, 10 magnet insertion hole, 11 weight reduction hole, 12, 20 shaft hole, 13 interpole bridge, 14 interpole gap, 15 semi-elliptical shape, 16, 32, 46, 51, 56 end plate, 17, 30, 41 pendulum mass (mass), 18, 33, 42a, 42b, 52 protrusion, 19, 47 guide hole, 21, 43a, 43b weight part, 31 guide groove, 41a first mass, 41b second mass, 45 connecting member, 48 recess, 53 flow path, 53a, 53b groove, 55 tip, 57, 58 discharge hole.
Claims (9)
- ロータとステータとを備え、
前記ロータは、
シャフト孔を有するロータコアと、
前記ロータコアの外周部に設けられる複数の永久磁石と、
前記シャフト孔と複数の前記永久磁石との間に設けられる複数の貫通孔と、
両端部に凸部および凹部のうちの一方である第1ガイド体を有し、前記複数の貫通孔に挿入される複数の質量体と、
前記ロータコアの両端に設けられ、前記凸部および前記凹部のうちの他方である複数の第2ガイド体を有する一対の端板と、を備え、
前記第2ガイド体に対する前記第1ガイド体の摺動によって前記ロータコアに対する前記質量体の揺動をガイドする
ことを特徴とする回転電機。 A rotor and a stator are provided.
The rotor is
A rotor core having a shaft hole;
A plurality of permanent magnets provided on an outer periphery of the rotor core;
a plurality of through holes provided between the shaft hole and the plurality of permanent magnets;
a plurality of mass bodies each having a first guide body that is one of a convex portion and a concave portion at both ends and inserted into the plurality of through holes;
a pair of end plates provided at both ends of the rotor core, the end plates having a plurality of second guide bodies which are the other of the protrusions and the recesses;
a first guide body sliding relative to a second guide body to guide a swinging movement of the mass body relative to the rotor core, - 前記永久磁石の極対数をNとすると、下式に従って、前記質量体の揺動軌道の回転半径Lと、前記質量体の揺動軌道の回転中心とロータコアの中心との距離Rと、を設定する
R/L=(6N)2
ことを特徴とする請求項1に記載の回転電機。 If the number of pole pairs of the permanent magnet is N, the rotation radius L of the swing orbit of the mass body and the distance R between the rotation center of the swing orbit of the mass body and the center of the rotor core are set according to the following formula: R/L = (6N) 2
2. The rotating electric machine according to claim 1 . - 前記端板は、前記質量体の前記第1ガイド体および前記端板の前記第2ガイド体に潤滑油を流動させるための油溝を備える
ことを特徴とする請求項1または2に記載の回転電機。 3 . The rotating electric machine according to claim 1 , wherein the end plate is provided with an oil groove for allowing lubricating oil to flow in the first guide body of the mass body and the second guide body of the end plate. 4 . - 前記貫通孔の中心は、d軸またはq軸と重なる位置にある
ことを特徴とする請求項1から3の何れか一つに記載の回転電機。 The rotating electric machine according to claim 1 , wherein the center of the through hole is located at a position overlapping with a d-axis or a q-axis. - 前記質量体は、第1貫通孔に挿入され、両端部に第1凸部を有する第1質量体と、第2貫通孔に挿入され、両端部に第2凸部を有する第2質量体と、前記第1凸部と前記第2凸部とを連結する連結部材と、を備え、
前記一対の端板は、前記第1凸部が摺動する第1凹部と、前記第2凸部が摺動する第2凹部と、を夫々備え、
前記第1凹部および前記第2凹部は、前記第1凹部と前記第2凹部との中心を通る径方向の直線に対し鏡面対称に配置される
ことを特徴とする請求項1から4の何れか一つに記載の回転電機。 the mass body includes a first mass body that is inserted into the first through hole and has first convex portions at both ends, a second mass body that is inserted into the second through hole and has second convex portions at both ends, and a connecting member that connects the first convex portion and the second convex portion,
The pair of end plates each include a first recess in which the first protrusion slides and a second recess in which the second protrusion slides,
5. The rotating electric machine according to claim 1, wherein the first recess and the second recess are arranged in mirror symmetry with respect to a radial line passing through centers of the first recess and the second recess. - 前記一対の端板は、前記第1凹部と前記第2凹部とを繋ぎ、前記連結部材が収容される第3凹部を備える
ことを特徴とする請求項5に記載の回転電機。 The rotating electric machine according to claim 5 , wherein the pair of end plates each include a third recess that connects the first recess and the second recess and receives the connecting member. - 前記第1ガイド体の各々および前記第2ガイド体の各々は、1つの凸部または1つの凹部を有し、
前記第1ガイド体および前記第2ガイド体は、前記質量体の中心位置より径方向の内側に配置されることを特徴とする請求項1から4の何れか一つに記載の回転電機。 Each of the first guide bodies and each of the second guide bodies have one convex portion or one concave portion,
5. The rotating electric machine according to claim 1, wherein the first guide body and the second guide body are disposed radially inward from a center position of the mass body. - 前記第1ガイド体の各々および前記第2ガイド体の各々は、2つの凸部または2つの凹部を有し、
2つの前記凹部は、2つの前記凹部の中心を通る径方向の直線に対し鏡面対称に配置される
ことを特徴とする請求項1から4の何れか一つに記載の回転電機。 Each of the first guide bodies and each of the second guide bodies have two protrusions or two recesses,
The rotating electric machine according to claim 1 , wherein the two recesses are arranged in mirror symmetry with respect to a radial line passing through centers of the two recesses. - 前記質量体の全長は、前記ロータコアの軸長と前記一対の端板の厚みを合わせた長さ以下である
ことを特徴とする請求項1から8の何れか一つに記載の回転電機。 9. The rotating electric machine according to claim 1, wherein an overall length of the mass body is equal to or less than a combined length of an axial length of the rotor core and a thickness of the pair of end plates.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/040740 WO2024095320A1 (en) | 2022-10-31 | 2022-10-31 | Rotary electric machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/040740 WO2024095320A1 (en) | 2022-10-31 | 2022-10-31 | Rotary electric machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024095320A1 true WO2024095320A1 (en) | 2024-05-10 |
Family
ID=90929979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/040740 WO2024095320A1 (en) | 2022-10-31 | 2022-10-31 | Rotary electric machine |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024095320A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5018909U (en) * | 1973-06-15 | 1975-03-03 | ||
| JP2001186745A (en) * | 1999-12-24 | 2001-07-06 | Fujitsu Ltd | Reaction cancel device |
| JP2009050068A (en) * | 2007-08-17 | 2009-03-05 | Kura Gijutsu Kenkyusho:Kk | Magnetic flux shunt controlling dynamo-electric machine system |
-
2022
- 2022-10-31 WO PCT/JP2022/040740 patent/WO2024095320A1/en unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5018909U (en) * | 1973-06-15 | 1975-03-03 | ||
| JP2001186745A (en) * | 1999-12-24 | 2001-07-06 | Fujitsu Ltd | Reaction cancel device |
| JP2009050068A (en) * | 2007-08-17 | 2009-03-05 | Kura Gijutsu Kenkyusho:Kk | Magnetic flux shunt controlling dynamo-electric machine system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4449035B2 (en) | Permanent magnet rotating electric machine for electric vehicles | |
| JP4269953B2 (en) | Rotating electric machine | |
| EP2226924B1 (en) | Motor and rotor for dynamo-electric machine | |
| JP2007097387A (en) | Rotary electric machine | |
| JP2014121202A (en) | Rotor of embedded magnet type synchronous motor, embedded magnet type synchronous motor | |
| JP5323592B2 (en) | Permanent magnet rotating electric machine and electric vehicle using the same | |
| JP2020120444A (en) | Rotor of rotary electric machine and rotary electric machine | |
| WO2017090159A1 (en) | Rotary electric machine | |
| JP2013162613A (en) | Dynamo-electric machine and dynamo-electric system | |
| WO2017073275A1 (en) | Magnet type rotor, rotary electric machine provided with magnet type rotor, and electric automobile provided with rotary electric machine | |
| JP3550971B2 (en) | Electric motor | |
| WO2024095320A1 (en) | Rotary electric machine | |
| CN111384790A (en) | Stator for motor and motor | |
| JP4890056B2 (en) | Electric motor | |
| JP2021097434A (en) | Rotor for rotary electric machine, and rotary electric machine | |
| WO2019069547A1 (en) | Rotor, motor, and electric power steering device | |
| WO2021002381A1 (en) | Motor and motor unit | |
| WO2022091198A1 (en) | Rotary electric machine and electric power steering device | |
| JP4545702B2 (en) | Electric motor | |
| JP2012161243A (en) | Permanent magnet rotating electric machine | |
| JP2018152960A (en) | Stator of rotary electric machine | |
| WO2019202943A1 (en) | Motor | |
| WO2023199460A1 (en) | Rotation device | |
| JP2020014368A (en) | Brushless motor and manufacturing method thereof | |
| JP2012016112A (en) | End plate of rotation electrical machine for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22964343 Country of ref document: EP Kind code of ref document: A1 |