WO2024089812A1 - Système de robot - Google Patents
Système de robot Download PDFInfo
- Publication number
- WO2024089812A1 WO2024089812A1 PCT/JP2022/039969 JP2022039969W WO2024089812A1 WO 2024089812 A1 WO2024089812 A1 WO 2024089812A1 JP 2022039969 W JP2022039969 W JP 2022039969W WO 2024089812 A1 WO2024089812 A1 WO 2024089812A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- robot
- robot system
- operator
- mode
- arm
- Prior art date
Links
- 239000000523 sample Substances 0.000 claims abstract description 43
- 238000012423 maintenance Methods 0.000 claims description 13
- 238000012545 processing Methods 0.000 claims description 10
- 230000007704 transition Effects 0.000 claims description 10
- 230000008859 change Effects 0.000 claims description 8
- 230000006870 function Effects 0.000 description 56
- 238000012544 monitoring process Methods 0.000 description 37
- 230000036544 posture Effects 0.000 description 33
- 230000033001 locomotion Effects 0.000 description 31
- 238000002604 ultrasonography Methods 0.000 description 28
- 238000004891 communication Methods 0.000 description 21
- 210000002683 foot Anatomy 0.000 description 20
- 238000010586 diagram Methods 0.000 description 19
- 238000000034 method Methods 0.000 description 18
- 238000003825 pressing Methods 0.000 description 17
- 230000008569 process Effects 0.000 description 15
- 230000007246 mechanism Effects 0.000 description 13
- 238000001514 detection method Methods 0.000 description 12
- 238000012790 confirmation Methods 0.000 description 10
- 238000003860 storage Methods 0.000 description 8
- 210000004204 blood vessel Anatomy 0.000 description 7
- 210000003811 finger Anatomy 0.000 description 7
- 238000007689 inspection Methods 0.000 description 7
- 238000001356 surgical procedure Methods 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 4
- 230000008929 regeneration Effects 0.000 description 4
- 238000011069 regeneration method Methods 0.000 description 4
- 210000004247 hand Anatomy 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012217 deletion Methods 0.000 description 2
- 230000037430 deletion Effects 0.000 description 2
- 238000012905 input function Methods 0.000 description 2
- 210000004936 left thumb Anatomy 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 210000004935 right thumb Anatomy 0.000 description 2
- 238000004092 self-diagnosis Methods 0.000 description 2
- 208000031481 Pathologic Constriction Diseases 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000036262 stenosis Effects 0.000 description 1
- 208000037804 stenosis Diseases 0.000 description 1
- 210000003371 toe Anatomy 0.000 description 1
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
Definitions
- This specification discloses a robot system.
- a robot system of this type includes a robot arm that holds an ultrasound probe and moves the ultrasound probe along the body surface of a subject, a storage unit that stores instruction trajectory information for moving the ultrasound probe by the robot arm, and a robot arm control unit that controls the drive of the robot arm to move the ultrasound probe according to the stored instruction movement trajectory (see, for example, Patent Document 1).
- This robot system also includes a tactile input device that is connected to the robot arm control unit via a network such as the Internet, and that remotely detects living body contact pressure information of the ultrasound probe held by the robot arm and remotely controls the drive of the robot arm.
- the primary objective of this disclosure is to improve the convenience of users when using a robot for ultrasound echo guidance.
- the robot system of the present disclosure comprises: a robot having an arm capable of holding an ultrasonic probe; a wireless operation terminal that is wirelessly connected to the robot and is used by an operator when performing ultrasonic echo guidance using the robot;
- the gist of the project is to provide the following:
- the wireless operation terminal is wirelessly connected to the robot, which reduces restrictions on the location where the wireless operation terminal can be used when performing ultrasonic echo guidance. As a result, it is possible to improve the convenience for the user when using the robot for ultrasonic echo guidance.
- FIG. 1 is an external perspective view of a robot system according to an embodiment of the present invention.
- FIG. 1 is a schematic configuration diagram of a robot.
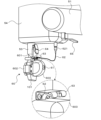
- FIG. 2 is a partial enlarged view of the robot including the hand portion.
- FIG. 2 is a partial enlarged view of the robot including the hand portion.
- FIG. 2 is a block diagram showing electrical connections of the robot system.
- FIG. 2 is an explanatory diagram showing the movement direction of an ultrasonic probe.
- FIG. 2 is an explanatory diagram for explaining a mode transition from power-on to power-off of the robot system.
- FIG. 4 is an explanatory diagram showing an example of an operation mode screen displayed on an operation panel.
- FIG. 11 is an explanatory diagram showing a 90-degree rotation operation of the ultrasonic probe.
- FIG. 4 is an explanatory diagram showing the correspondence between each operation button of the ESR controller and the movement direction of the ultrasonic probe.
- FIG. FIG. 2 is an explanatory diagram showing the correspondence between each switch of the foot switch and its function.
- 13 is a flowchart illustrating an example of a wireless connection confirmation process. 13 is a flowchart illustrating an example of a point sorting process.
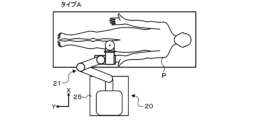
- FIG. 13 is an explanatory diagram showing the positional relationship between a type A human body and a robot.
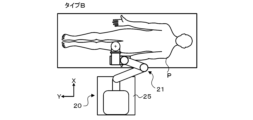
- FIG. 13 is an explanatory diagram showing the positional relationship between a type B human body and a robot.
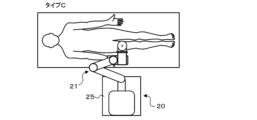
- FIG. 13 is an explanatory diagram showing the positional relationship between a type C human body and a robot.
- FIG. 13 is an explanatory diagram showing the positional relationship between a type D human body and a robot.
- FIG. 13 is an explanatory diagram showing the state of point sorting.
- FIG. 13 is an explanatory diagram showing the state of point sorting.
- FIG. 2 is an explanatory diagram for explaining a monitoring function.
- FIG. 1 is an external perspective view of the robot system 10 of this embodiment.
- FIG. 2 is a schematic diagram of the robot 20.
- FIGS. 3 and 4 are partial enlarged views of the robot 20 including the hand unit 60.
- FIG. 5 is a block diagram showing the electrical connections of the robot system 10.
- the front-to-back direction is the X-axis
- the left-to-right direction is the Y-axis
- the up-down direction is the Z-axis.
- the robot system 10 of this embodiment includes a robot 20 having a multi-joint robot arm 21, a foot switch 91, an ESR controller 92, a tablet terminal 93, and an emergency stop switch 94.
- the robot system 10 holds the ultrasonic probe 101 of the ultrasonic diagnostic device 100 at the tip of the robot arm 21, and controls the robot 20 to move while pressing the ultrasonic probe 101 against the surface of the human body, thereby making the ultrasonic diagnostic device 100 acquire ultrasonic echo images of the human body.
- the robot system 10 is used as an ultrasonic echo guide during surgery, such as catheter surgery.
- the operator (surgeon) who operates the catheter guide wire instructs the robot 20 to press the ultrasonic probe 101 against the surface of the human body (patient), and while recognizing the positional relationship between the tip of the guide wire and the blood vessel from the obtained ultrasonic echo image, advances the guide wire, thereby allowing the guide wire to accurately pass through the center of the occlusion or stenosis of the blood vessel.
- the operator manually operates the robot arm 21, and while checking the ultrasonic echo image acquired by placing the ultrasonic probe 101 held by the robot arm 21 against the patient, determines the points (images) to be reproduced during surgery and performs direct teaching to register them in the robot 20 (robot control device 80).
- the ultrasound diagnostic device 100 comprises an ultrasound probe 101 and an ultrasound diagnostic device main body 110 connected to the ultrasound probe 101 via a cable 102.
- the ultrasound diagnostic device main body 110 comprises an ultrasound diagnosis control unit 111 that controls the entire device, an image processing unit 112 that processes the received signal from the ultrasound probe 101 to generate an ultrasound echo image, an image display unit 113 that displays the ultrasound echo image, and various operation switches (not shown).
- the robot 20 includes a base 25, a robot arm 21 mounted on the base 25, a hand 60 attached to the tip of the robot arm 21, a height adjustment mechanism 45 that manually adjusts the height of the robot arm 21, a robot control device 80 that controls the robot arm 21, and an operation panel 90.
- casters 26 with stoppers are attached to the four corners of the back surface of the base 25.
- the robot 20 can be moved freely by the casters 26.
- locking parts 28 are provided at multiple points (e.g., three points) on the back surface of the base 25, which protrude vertically downward when a lever 27 is pressed down to lock (fix) the robot 20 so that it cannot move.
- the robot arm 21 is a seven-axis articulated arm, and as shown in Figures 1 and 2, has a first arm 22, a second arm 23, a base 24, a first arm driver 35, a second arm driver 36, a position holding device 37, a three-axis rotating mechanism 50, and a brake lever 65 (see Figure 4).
- the base end of the first arm 22 is connected to the base 24 via a first joint shaft 31 that extends in the vertical direction (Z-axis direction).
- the first arm driving device 35 includes a motor 35a, an encoder 35b, and an amplifier 35c.
- the rotation shaft of the motor 35a is connected to the first joint shaft 31 via a reduction gear (not shown).
- the first arm driving device 35 rotates (pivots) the first arm 22 along a horizontal plane (XY plane) around the first joint shaft 31 as a fulcrum by driving the first joint shaft 31 to rotate with the motor 35a.
- the encoder 35b is attached to the rotation shaft of the motor 35a and is configured as a rotary encoder that detects the amount of rotational displacement of the motor 35a.
- the amplifier 35c is a driving unit for driving the motor 35a by switching the switching element.
- the base end of the second arm 23 is connected to the tip end of the first arm 22 via a second joint shaft 32 extending in the vertical direction.
- the second arm driving device 36 includes a motor 36a, an encoder 36b, and an amplifier 36c.
- the rotating shaft of the motor 36a is connected to the second joint shaft 32 via a reduction gear (not shown).
- the second arm driving device 36 rotates (pivots) the second arm 23 along a horizontal plane around the second joint shaft 32 as a fulcrum by driving the second joint shaft 32 to rotate with the motor 36a.
- the encoder 36b is attached to the rotating shaft of the motor 36a and is configured as a rotary encoder that detects the amount of rotational displacement of the motor 36a.
- the amplifier 35c is a driving unit for driving the motor 35a by switching the switching element.
- the robot 20 has two arm postures: a right arm posture mode in which the robot arm 21 operates in a right arm posture, and a left arm posture mode in which the robot arm 21 operates in a left arm posture.
- the base 24 is provided so as to be movable up and down with respect to the base 25 by a lifting device 40 installed on the base 25.
- the lifting device 40 includes a first slider 41 fixed to the base 24, a first guide member 42 extending in the vertical direction to guide the movement of the first slider 41, a first ball screw shaft 43 (lifting shaft) extending in the vertical direction and screwed into a ball screw nut (not shown) fixed to the first slider 41, a motor 44a that rotates the first ball screw shaft 43, an encoder 44b (see FIG. 3), and an amplifier 44c that drives the motor 44a.
- the lifting device 40 moves the base 24 fixed to the first slider 41 up and down along the first guide member 42 by rotating the first ball screw shaft 43 with the motor 44a.
- the encoder 44b is configured as a linear encoder that detects the vertical position (lifted position) of the first slider 41 (base 24).
- the height adjustment mechanism 45 includes a second slider 46 fixed to the first guide member 42 of the lifting device 40, a second guide member 47 fixed to the base 25 and extending in the vertical direction to guide the movement of the second slider 46, a second ball screw shaft 48 (lifting shaft) extending in the vertical direction and screwed into a ball screw nut (not shown) fixed to the second slider 46, and a rotating handle 49 connected to the second ball screw shaft 48 via a power transmission mechanism (bevel gear).
- the height adjustment mechanism 45 moves the first guide member 42 of the lifting device 40 fixed to the second slider 46 up and down along the second guide member 47 by manually operating the rotating handle 49 to rotate the second ball screw shaft 48.
- the base end of the robot arm 21 is fixed to the base 24, which is supported by the first guide member 42. Therefore, the height of the robot arm 21 can be adjusted by moving the first guide member 42 up and down using the height adjustment mechanism 45. This allows the height of the robot arm 21 to be adjusted according to the height of a bed on which a patient for ultrasound diagnosis lies, for example.
- the three-axis rotating mechanism 50 is connected to the tip of the second arm 23 via the attitude-maintaining shaft 33 extending in the vertical direction.
- the three-axis rotating mechanism 50 includes a first rotation shaft 51, a second rotation shaft 52, and a third rotation shaft 53 that are perpendicular to one another, a first rotation device 55 that rotates the first rotation shaft 51, a second rotation device 56 that rotates the second rotation shaft 52, and a third rotation device 57 as a hand drive device that rotates the third rotation shaft 53 to which the hand portion 60 is connected.
- the first rotation shaft 51 is supported in an orthogonal position relative to the attitude-maintaining shaft 33.
- the second rotation shaft 52 is supported in an orthogonal position relative to the first rotation shaft 51.
- the third rotation shaft 53 is supported in an orthogonal position relative to the second rotation shaft 52.
- the first rotating device 55 has a motor 55a that rotates the first rotating shaft 51, an encoder 55b that is attached to the rotating shaft of the motor 55a and detects the amount of rotational displacement of the motor 55a, and an amplifier 55c that drives the motor 55a.
- the second rotating device 56 has a motor 56a that rotates the second rotating shaft 52, an encoder 56b that is attached to the rotating shaft of the motor 56a and detects the amount of rotational displacement of the motor 56a, and an amplifier 56c that drives the motor 56a.
- the third rotating device 57 has a motor 57a that rotates the third rotating shaft 53, an encoder 57b that is attached to the rotating shaft of the motor 57a and detects the amount of rotational displacement of the motor 57a, and an amplifier 57c that drives the motor 56a.
- the third rotation device 57 (hand drive device) includes a housing 54 to which the second rotation shaft 52 is connected and which rotatably supports the third rotation shaft 53 so that the third rotation shaft 53 extends in a direction perpendicular to the second rotation shaft 52, a motor 57c that rotates the third rotation shaft 53, a force sensor 68, etc.
- the housing 54 is a box-shaped member having a first surface 54b, a second surface 54t, a third surface 54r, and a fourth surface 54f that are connected in the circumferential direction.
- the second rotating shaft 52 is connected to the third surface 54r.
- the third rotating shaft 53 is rotatably supported on the housing 54 so as to extend outward from the first surface 54b perpendicular to the third surface 54r, and is driven to rotate by a motor 57a.
- the first surface 54b is the lower surface
- the second surface 54t is the upper surface
- the third surface 54r is the back surface
- the fourth surface 54f is the front surface.
- FIG. 1 the first surface 54b
- the second surface 54t is the upper surface
- the third surface 54r is the back surface
- the fourth surface 54f is the front surface.
- the second surface 54t (top surface) of the housing 54 is provided with an operating handle 66 that is held by the operator when the operator manually operates the ultrasound probe 101 held by the robot arm 21 during direct teaching, and a stop switch 67 that the operator can operate to temporarily stop the operation of the robot arm 21 when an unexpected operation occurs in the robot arm 21.
- the force sensor 68 is attached to the third rotation shaft 53 of the robot arm 21.
- the force sensor 68 transmits power from the motor 57a to the third rotation shaft 53 (hand end portion 60), and detects the force components acting in the axial directions of the X-axis, Y-axis, and Z-axis as external forces acting on the hand end portion 60 and the operating handle 66, as well as the torque components acting around the axes Ra, Rb, and Rc.
- the hand 60 is attached to the tip of the third rotating shaft 53.
- the hand 60 has a base 601, a holding part 602 that holds the ultrasonic probe 101 so as to be coaxial with the third rotating shaft 53, and a gripping part 603 that is a part that is held by the operator.
- the base 601 is a plate-shaped member and is detachably attached to the third rotating shaft 53 by a snap lock 64.
- the hand 60 (base 601) may be attached to the third rotating shaft 53 by other fixing devices (e.g., a ratchet-type fixing device, a screw, etc.).
- the holding part 602 has a holder provided on one surface of the base 601, and holds the ultrasonic probe 101 by the holder.
- the gripping part 603 is held by the operator when the operator moves the ultrasonic probe 101 held by the robot arm 21 by hand, for example, in direct teaching.
- the gripping portion 603 is provided on the surface of the base 601 opposite to the surface on which the holding portion 602 is provided, and is formed so as to protrude outward in a convex shape from the other surface.
- the gripping portion 603 is formed with a convex curved surface as shown in Figures 3 and 4, but it may be formed in any shape, such as a rod shape, a hemisphere shape, a rectangular parallelepiped shape, or a cube shape, as long as it is a shape that can be held by an operator.
- a direct teaching switch 61 is provided at the top of the convex portion (convex curved surface portion) of the gripping portion 603 to allow the operator to manually operate the robot arm 21 in direct teaching.
- the direct teaching switch 61 is configured as a three-position enable switch.
- One end of a cable 62 is connected to a terminal of the direct teaching switch 61.
- a cable guide 63 that guides one end of the cable 62 to the direct teaching switch 61 is fixed to the other surface of the base 601 of the hand 60, closer to the housing 54 than the grip 603.
- the other end of the cable 62 is connected to a wiring that runs from the housing 54 along the robot arm 21 to the robot control device 80.
- a connector 621 is provided at the other end of the cable 62, and is removably connected to a connector provided on the housing 54. Therefore, by unlocking the snap lock 64 and pulling out the connector 621, the hand 60 can be easily detached from the housing 54, improving maintainability.
- the robot 20 of this embodiment operates the robot arm 21 by a combination of translational motion in three directions, the X-axis direction, the Y-axis direction, and the Z-axis direction, by the first arm driving device 35, the second arm driving device 36, and the lifting device 40, and rotational motion in three directions, the X-axis direction Rb (pitching), the Y-axis direction (rolling) Ra, and the Z-axis direction (yawing) Rc, by the three-axis rotation mechanism 50.
- the robot 20 can move the ultrasonic probe 101 in each of the X-axis, Y-axis, and Z-axis directions (both forward and reverse directions) and rotate it around each of the Ra, Rb, and Rc axes (both forward and reverse rotation directions), as shown in FIG. 6.
- the attitude holding device 37 holds the attitude of the three-axis rotating mechanism 50 (the orientation of the first rotating shaft 51) in a constant orientation regardless of the orientation of the first arm 22 and the second arm 23.
- the attitude holding device 37 includes a motor 37a, an encoder 37b, and an amplifier 37c.
- the rotating shaft of the motor 37a is connected to the attitude holding shaft 33 via a reduction gear (not shown).
- the attitude holding device 37 sets a target rotation angle of the attitude holding shaft 33 based on the rotation angle of the first joint shaft 31 and the rotation angle of the second joint shaft 32 so that the axial direction of the first rotating shaft 51 is always in the left-right direction (X-axis direction), and drives and controls the motor 37a so that the attitude holding shaft 33 is at the target rotation angle. This makes it possible to control the translational motion in three directions and the rotational motion in three directions independently, making control easier.
- the brake lever 65 is a generally L-shaped member that extends downward (in the direction of extension of the attitude-maintaining shaft 33) from the three-axis rotating mechanism 50 and bends at an orthogonal direction at the end of the extension.
- Mechanical brakes e.g., disk brakes
- the mechanical brakes are attached to each axis of the robot arm 21 except for the horizontally rotating axis (first joint axis 31, second joint axis 32, and attitude-maintaining shaft 33), and the mechanical brakes are configured to be activated when the corresponding motor stops operating.
- the operator can release the mechanical brake by operating the brake lever 65 upward in the figure. This allows the operator to manually release the mechanical brake even if the power supply is cut off due to some abnormality in the robot 20, and to move the robot arm 21 to a safe position.
- the operation panel 90 is a touch panel display that displays various information related to the robot system 10 and allows various instructions to be input to the robot system 10.
- the operation panel 90 is installed on the top surface of the housing 29 that houses the lifting device 40 of the robot 20 and the robot control device 80.
- the foot switch 91 is a pedal switch that is turned on when the operator steps on it, and is connected to the robot control device 80 of the robot 20 via a cable.
- the foot switch 91 has four switches (a first switch 911, a second switch 912, a third switch 913, and a fourth switch 914) arranged horizontally.
- the ESR controller 92 is an operation controller that is operated by the operator while being held with both hands and pressed down, and is connected wirelessly to the robot control device 80 of the robot 20.
- the ESR controller 92 may also be connected to the robot control device 80 of the robot 20 by wire. In this embodiment, as shown in FIG.
- the ESR controller 92 has a directional key button 921 (up button, down button, left button, and right button) operated by the left thumb, four push buttons 922 (A button, B button, X button, and Y button) arranged in a diamond shape operated by the right thumb, L1 and L2 buttons 923 operated by the index finger and middle finger of the left hand, respectively, R1 and R2 buttons 924 operated by the index finger and middle finger of the right hand, respectively, and multiple push buttons 925 and 926 arranged between the directional key button 921 and the four push buttons 922.
- a directional key button 921 up button, down button, left button, and right button
- four push buttons 922 A button, B button, X button, and Y button
- L1 and L2 buttons 923 operated by the index finger and middle finger of the left hand, respectively
- R1 and R2 buttons 924 operated by the index finger and middle finger of the right hand, respectively
- multiple push buttons 925 and 926 arranged between the directional key button 921 and
- the tablet terminal 93 is equipped with a control device including a CPU, ROM, RAM, and storage (SSD), a touch panel display that displays various information and allows the operator to input operations, and a communication unit.
- the tablet terminal 93 is communicatively connected to the robot control device 80 of the robot 20 via wireless communication.
- the tablet terminal 93 has a remote desktop function that allows the operation panel 90 to be remotely operated from the tablet terminal 93 via wireless communication.
- the emergency stop switch 94 is a button that forcibly stops the robot 20 in the event of an emergency, and is connected to the robot control device 80 via a cable.
- the emergency stop switch 94 may also be provided on the robot arm 21.
- the robot control device 80 comprises a robot control unit 81, a monitoring unit 82, an IO unit 83, a communication unit 84, and a memory unit 85.
- the robot control unit 81 is configured as a processor including a CPU, ROM, RAM, peripheral circuits, etc.
- the monitoring unit 82 is configured as a one-chip microcomputer including a CPU, ROM, RAM, peripheral circuits, etc. The monitoring unit 82 may also be duplicated.
- the robot control unit 81 performs various processes related to the control of the robot arm 21 (motors 35a-37a, 44a, 55a-57a).
- the monitoring unit 82 monitors the status of each unit, such as the IO unit 83, communication unit 84, amplifiers 35c-37c, 44c, 55c-57c, encoders 35b-37b, 44b, 55b-57b, and a sensor unit including a direct teaching switch 61, etc.
- the IO unit 83 is an I/O port that inputs detection signals from the direct teaching switch 61, detection signals from the stop switch 67, operation signals from the operation panel 90, etc., and outputs display signals to the operation panel 90.
- the communication unit 84 communicates with the robot control device 80 and external devices (foot switch 91, ESR controller 92, tablet terminal 93, emergency stop switch 94, etc.) via wired or wireless means, and exchanges various signals and data.
- Each of the amplifiers 35c-37c, 44c, 55c-57c includes a motor control unit 71, a drive power supply unit 72, and an IO unit 73.
- the motor control unit 71 has switching elements, and controls the motors 35a-37a, 44a, 55a-57a by controlling the switching of the switching elements based on feedback signals from the encoders 35b-37b, 44b, 55b-57b, etc.
- the drive power supply unit 72 supplies the power required to drive the motors 35a-37a, 44a, 55a-57a.
- the IO unit 83 is an I/O port that inputs various signals such as position signals from the encoders 35b-37b, 44b, 55b-57b, current signals from current sensors that detect the current flowing through each of the motors 35a-37a, 44a, 55a-57a, and command signals (control signals) from the robot control unit 81 to each of the motors 35a-37a, 44a, 55a-57a.
- the robot 20 has three robot statuses: control off, control on, and robot on.
- Control off is a state in which the robot control unit 81 has stopped supplying power to the amplifiers 35c to 37c, 44c, and 55c to 57c, making the robot arm 21 (motor) uncontrollable.
- Control on is a state in which the robot control unit 81 is supplying power to the amplifiers 35c to 37c, 44c, and 55c to 57c, making the robot arm 21 controllable. In this state, it is possible to change the posture of the robot arm 21 by directly touching it.
- Robot on is a state in which the robot control unit 81, in the control on state, outputs a control signal to the amplifiers 35c to 37c, 44c, and 55c to 57c to control the robot arm 21.
- the robot status is changed based on the operator's instructions and based on the monitoring results of the monitoring unit 82.
- Figure 7 is an explanatory diagram explaining the modes through which the robot system 10 transitions from power-on to power-off.
- the robot control device 80 of the robot system 10 first executes a startup mode in which the system is prepared for use.
- pre-use inspection In the start-up mode, pre-use inspection, user selection/user setting, self-diagnosis, posture conversion, etc. are performed.
- images and explanations are used to present inspection points on the operation panel 90 to encourage the user to inspect the system before using it.
- the operation panel 90 accepts the selection of a user registered in advance and various settings for each user.
- the parameter setting function described later can be used to set the operating feel (assist force) when the user (operator) manually operates the robot arm 21 in direct teaching for each user.
- the posture change involves accepting a selection on the operation panel 90 between a right-arm posture mode in which the robot arm 21, including the horizontal joint arm (first arm 22, second arm 23), operates in a right-arm posture, or a left-arm posture mode in which the robot arm 21 operates in a left-arm posture, and automatically changing the posture of the robot arm 21 according to the selected posture mode.
- the robot control device 80 transitions to the operation mode.
- the modes available after the system has started up also include a maintenance mode and a setting mode. The mode transitions between the three modes occur when the operator operates the operation panel 90 or tablet terminal 93. Then, when an instruction to turn off the power is given, the robot control device 80 executes the shutdown mode, which performs a specified shutdown process, and then turns off the power.
- the operation panel 90 includes a "tablet connection start” button.
- the “tablet connection start” button When the operator touches the "tablet connection start” button on the operation panel 90, wireless connection between the tablet terminal 93 and the robot control device 80 is permitted. For this reason, when the operator wirelessly connects the tablet terminal 93 to the robot control device 80, it is necessary for the operator to approach close to the robot 20 and directly operate the operation panel 90.
- the tablet terminal 93 When the tablet terminal 93 is wirelessly connected to the robot control device 80, the same screen as that displayed on the operation panel 90 is displayed on the display of the tablet terminal 93 by the remote desktop function.
- the operator can remotely operate the operation panel 90 from a position away from the robot 20 by operating the tablet terminal 93.
- the screen displayed on the operation panel 90 or the remotely connected tablet terminal 93 includes an "operation” button, a "maintenance” button, and a “setting” button, as shown in FIG. 8, and the operator can transition to any of the operation mode, maintenance mode, and setting mode by touching (operating) any of the three buttons.
- maintenance mode can only be used by maintenance personnel, and a password is required to switch modes.
- the operation mode is the mode used during surgery.
- the various functions of the operation mode include direct teaching, point registration, point display, point sorting, point deletion, point playback, interpolation movement, 90 degree rotation, fine adjustment, movement to storage position, movement to origin position, etc. These functions are executed by the operator operating the operation panel 90, tablet terminal 93, foot switch 91, ESR controller 92, etc.
- Direct teaching is a function that allows the operator to directly operate the robot arm 21 by gripping the gripping portion 603 of the hand portion 60 or the operating handle 66 and applying force, and generates an assist force from the motors of each axis in the direction of the force applied so that the operator can operate the robot arm 21 with less force.
- Direct teaching is performed only while the direct teaching switch 61 is on. When the direct teaching switch 61 is turned off, the motor assistance is stopped, making it difficult for the operator to manually operate the robot arm 21. Note that point regeneration, which will be described later, is performed with the direct teaching switch 61 turned off.
- point registration the operator manually operates the robot arm 21 in direct teaching, and while checking the ultrasound echo image acquired by placing the ultrasound probe 101 held by the robot arm 21 on the patient, determines and registers points (images) to be reproduced during surgery.
- the registered points include the position and orientation of the ultrasound probe 101 (X, Y, Z coordinate values and the angle values of Rb, Rb, Rc), the position of each axis of the robot arm 21 (angle values and elevation coordinate values), etc.
- Point registration can be performed by touching (operating) the "point record" button on the operation panel 90 or the remotely connected tablet terminal 93.
- point registration can also be performed by stepping on the foot switch 91 (for example, the first switch 911). This makes it possible to reliably perform point registration operations even if the operator manually operates the robot arm 21 and the operator's hands are occupied.
- the point display is a function that displays the registered points on the operation panel 90 or a remotely connected tablet terminal 93.
- the point display is a function that displays the registered points on the operation panel 90 or a remotely connected tablet terminal 93.
- the operable range of the ultrasound probe 101 is also displayed on the operation panel 90 or the tablet terminal 93.
- Point sorting is a function that rearranges the registered points.
- the order in which the points are played back is from the base of the patient's feet to the soles. For this reason, the robot control device 80 automatically rearranges the recorded points based on the conditions received from the user when changing posture in the startup mode. Details of point sorting will be described later.
- Point deletion is a function for deleting registered points.
- the points to be deleted can be selected individually or deleted all at once.
- the former operation is performed by touching (operating) the "Delete selected” button on the operation panel 90 or on the remotely connected tablet terminal 93, and the latter operation is performed by touching (operating) the "Delete all" button.
- Point replay is a function that replays registered points.
- point replay By executing point replay during surgery, ultrasonic echo images for each point are automatically acquired, and the surgeon can operate the catheter while viewing the images.
- the surgeon can move the point from the current point to the next point or the previous point by touching (operating) the operation panel 90 or the remotely connected tablet terminal 93, or by stepping on the foot switch 91.
- the surgeon can move the point from the current point to the next point by stepping on the third switch 913 of the foot switch 91, and can move from the current point to the previous point by stepping on the second switch 912 of the foot switch 91.
- the replay mode of point replay also includes interpolation movement and continuous movement.
- the robot control device 80 When continuous movement is selected, the robot control device 80 continues to operate while the operator is touching the operation panel 90 or stepping on the foot switch 91, and stops the robot arm 21 at that position when the touch or stepping is released. This allows the operator to stop the robot arm 21 at any point.
- Interpolation movement is a function that sets an arbitrary movement distance and moves the robot arm 21 (ultrasound probe 101) to that position. When an arbitrary movement distance is set, the position is calculated by automatic interpolation from registered points. Note that movement methods for point playback movement and interpolation movement include linear interpolation, joint interpolation, and circular interpolation. The operator can select one of the movement methods by operating the operation panel 90 or a remotely connected tablet terminal 93.
- the 90-degree rotation is a function that rotates the ultrasonic probe 101 by 90 degrees while maintaining the current posture of the robot arm 21.
- ultrasonic echo guidance in catheter surgery is performed by applying the long axis direction of the ultrasonic probe 101 to the direction of blood vessel progression.
- the uniaxial direction of the ultrasonic probe 101 is applied to the direction of blood vessel progression so that an ultrasonic echo image of a cross section in the width direction of the blood vessel is obtained to check whether the position of the catheter in the blood vessel is not displaced from the center of the blood vessel.
- the 90-degree rotation reproduces this series of operations.
- the ultrasonic probe 101 is rotated while being applied to the patient, the patient may feel pain or discomfort.
- the 90-degree rotation is performed by temporarily moving the ultrasonic probe 101 away from the patient's body surface, rotating the ultrasonic probe 101 by 90 degrees, and then contacting the ultrasonic probe 101 with the body surface, as shown in FIG. 9.
- the 90-degree rotation is performed by touching (operating) the "90-degree rotation" button on the operation panel 90 or the remotely connected tablet terminal 93, or by pressing the push button 925 on the ESR controller 92.
- the 90-degree rotation may be slightly off-angle as long as it changes the direction from the long axis to the short axis.
- the fine adjustment function allows fine position adjustment from the playback position by point playback. This is because even if the robot arm 21 is moved to a point registered by point playback, it rarely matches perfectly with the ultrasonic echo image acquired by direct teaching.
- the fine adjustment function can be performed individually for each of the X-axis, Y-axis, and Z-axis directions, and for each of the Y-axis Ra, X-axis Rb, and Z-axis Rc.
- the fine adjustment method includes a step operation that operates a preset step amount, and a continue operation that continues while a button is operated.
- the fine adjustment function can be performed by touching the corresponding button on the operation panel 90 or the remotely connected tablet terminal 93, or by pressing the corresponding button on the ESR controller 92.
- the operator can adjust to the + side of the X-axis direction by pressing the up button of the directional key buttons 921 operated by the left thumb, adjust to the - side of the X-axis direction by pressing the down button, adjust to the + side of the Y-axis direction by pressing the left button, and adjust to the - side of the Y-axis direction by pressing the right button.
- the operator can adjust to the + side of the Z-axis direction by pressing the L1 button of the L1 button operated by the index finger of the left hand and adjust to the - side of the Z-axis direction by pressing the L2 button.
- the operator can adjust to the + side of the Y-axis Ra by pressing the A button of the four diamond-shaped push buttons 922 operated by the right thumb, adjust to the - side of the Y-axis Ra by pressing the B button, adjust to the + side of the X-axis Rb by pressing the X button, and adjust to the - side of the X-axis Rb by pressing the Y button.
- the operator can adjust Rc around the Z axis to the + side by pressing the R1 button, which is operated with the index finger of the right hand, and R2 button, which is operated with the middle finger of the right hand, and can adjust Rc around the Z axis to the - side by pressing the R2 button.
- the ESR controller 92 also has an inversion function that inverts the positive and negative directions associated with each button for each set, with the X-axis and Rb around the X-axis, the Y-axis and Ra around the Y-axis, and the Z-axis and Rc around the Z-axis. This is because the direction of movement of the robot 20 seen by the operator changes, for example, when the operator operates the ESR controller 92 alongside the robot 20 and when the operator operates the ESR controller 92 in a position facing the robot 20.
- the inversion function is executed by pressing the push button 926 on the ESR controller 92 or by operating the operation panel 90 or a remotely connected tablet terminal 93.
- one of the foot switches 91 (e.g., the fourth switch 914) connected by wire to the robot control device 80 is provided with an enable button for enabling operation of the ESR controller 92, and the robot control device 80 only accepts operation of the ESR controller 92 within the range in which the foot switch 91 can be depressed.
- the movement to the storage position is a function that moves the robot arm 21 to a predetermined storage position (for example, a position where the robot arm 21 is folded to make the robot 20 compact).
- the movement to the origin position is a function that moves the robot arm 21 to a predetermined origin position (for example, a position where the robot arm 21 extends forward from the storage position and the tip of the ultrasound probe 101 is oriented to point straight down).
- the movement to the storage position is performed by touching (operating) the "storage position" button on the operation panel 90 or the remotely connected tablet terminal 93, and the movement to the origin position is performed by touching (operating) the "origin position" button on the operation panel 90 or the remotely connected tablet terminal 93.
- the maintenance mode is a mode that can only be used by maintenance personnel.
- the various functions of the maintenance mode include jog operation, status acquisition, regular inspection, and version management.
- the jog operation is a function that executes the operation of each axis of the robot arm 21, the reference operation of the hand, and the reference operation of the tip of the ultrasonic probe 101 by specifying any amount.
- the status acquisition is a function that can acquire the current state of the robot 20 (the angle of each axis of the robot arm 21, the position of the hand, the value of the force sensor 68, etc.).
- the regular inspection is a function that notifies that the time for inspection is approaching and encourages regular inspection of the device.
- the version management is a function that upgrades the software to the robot control device 80 via USB (Universal Serial Bus) in order to improve the functions of the system and deal with malfunctions.
- the setting mode is a mode in which various settings can be changed.
- the various functions of the setting mode include IO allocation setting, parameter setting, and user setting.
- the parameter setting is a function that allows you to change any parameter in this system.
- the parameter items that can be changed differ depending on the user level.
- the IO allocation setting is a function that allows you to change the allocation of functions to the foot switch 91 and the stop switch 67.
- the first switch 911, the second switch 912, the third switch 913, and the fourth switch 914 are assigned the following functions as the default settings for the foot switch 91: point registration, previous point in point regeneration, next point in point regeneration, and activation of the ESR controller 92, respectively.
- the allocation of each function such as point registration, previous point in point regeneration, next point, and activation of the ESR controller 92, can be changed to any of the first to fourth switches 911 to 914.
- the user setting has been described above.
- FIG. 12 is a flowchart showing an example of wireless connection confirmation processing executed by the robot control device 80.
- the robot control device 80 first determines whether the connection in progress flag F is set to a value of 0 (S100).
- the connection in progress flag F is a flag that is initially set to a value of 0 and is set to a value of 1 when a communication connection between the tablet terminal 93 and the communication unit 84 of the robot control device 80 is established.
- the robot control device 80 determines whether a connection start operation has been performed on the operation panel 90 (S102). The determination of whether a connection start operation has been performed is performed by determining whether the operator has touched (operated) the "tablet connection start” button (see FIG. 8) on the operation panel 90. When the robot control device 80 determines that a connection start operation has not been performed, it ends the wireless connection confirmation processing as it is. On the other hand, when the robot control device 80 determines that the "tablet connection start” button has been touched, it establishes a communication connection between the tablet terminal 93 and the communication unit 84 (S104), and then sets the connection flag F to a value of 1 (S106).
- the robot control device 80 permits a remote connection from the tablet terminal 93 (S108), and ends the wireless connection confirmation process.
- the tablet terminal 93 displays the same screen as the screen of the operation panel 90, and the operator can remotely operate the operation panel 90 by operating the tablet terminal 93. Since the operator can use the tablet terminal 93 in a place where the robot 20 is not visible, which may compromise safety, in this embodiment, in order to wirelessly connect the tablet terminal 93 to the robot control device 80, it is necessary to approach the robot 20 and operate the operation panel 80.
- the robot control device 80 determines whether or not a disconnection operation has been performed (S110). Whether or not a disconnection operation has been performed is determined by determining whether or not a "disconnect tablet connection" button on the operation panel 90 or on the remotely connected tablet terminal 93 has been touched (operated). If the robot control device 80 determines that a disconnection operation has been performed, it disconnects the communication connection with the tablet terminal 93 (S112), sets the connection in progress flag F to a value of 0 (S114), and ends the wireless connection confirmation process. Then, for example, the process returns to operation on the operation panel 90.
- the robot control device 80 acquires the radio wave intensity between the robot control device 80 and the tablet terminal 93 and determines whether the acquired radio wave intensity is equal to or greater than a threshold value (S116). If the robot control device 80 determines that the radio wave intensity is less than the threshold value, it disconnects the communication connection with the tablet terminal 93 (S112), sets the connection flag F to a value of 0 (S114), and ends the wireless connection confirmation process. This makes it possible to prevent the robot arm 21 from performing unexpected movements due to signal exchange between the robot control device 80 and the tablet terminal 93 in an unstable communication situation.
- the robot control device 80 determines whether the radio wave intensity is equal to or greater than the threshold value, it determines whether the communication connection with the tablet terminal 93 has been interrupted (S118). If the robot control device 80 determines that the communication connection has not been interrupted, it ends the connection confirmation process while maintaining the wireless connection state. On the other hand, when the robot control device 80 determines that the communication connection has been cut off, it transitions to a safe state (e.g., control off) (S120), sets the connection flag F to a value of 0 (S122), and ends the wireless connection confirmation process.
- a safe state e.g., control off
- FIG. 13 is a flowchart showing an example of the point sorting process executed by the robot control device 80.
- the robot control device 80 first acquires the posture type of the robot arm 21 relative to the patient (S200).
- the posture types include types A to D.
- Type A is a posture type in which the robot 20 is placed on the left hand side of the patient P and the robot arm 21 is operated in a left arm posture, as shown in FIG. 14A.
- Type B is a posture type in which the robot 20 is placed on the left hand side of the patient P and the robot arm 21 is operated in a right arm posture, as shown in FIG. 14B.
- Type C is a posture type in which the robot 20 is placed on the right hand side of the patient P and the robot arm 21 is operated in a left arm posture, as shown in FIG. 14C.
- Type D is a posture type in which the robot 20 is placed on the right hand side of the patient P and the robot arm 21 is operated in a right arm posture, as shown in FIG. 14D.
- the posture type is acquired by acquiring the posture type selected by the operator during posture conversion in the start-up mode.
- the robot control device 80 judges whether the acquired posture type is type A or type B (S202).
- the robot control device 80 judges that the posture type is type A or type B, it sorts the registered points in ascending order in the Y-axis direction (from right to left in FIG. 15) based on the Y-coordinate value of each point (S204), and ends the point sorting process.
- the robot control device 80 judges that the acquired posture type is type C or type D, it sorts the registered points in descending order in the Y-axis direction (from left to right in FIG. 16) based on the Y-coordinate value of each point (S206), and ends the point sorting process.
- the monitoring function of the monitoring unit 82 of the robot control device 80 will be described.
- the functions of the monitoring unit 82 include a monitoring function, a fault detection function, and a safety IO function.
- the robot control device 80 determines that an abnormality has occurred in any of the functions, it transitions the state of the robot 20 to a safe state (e.g., control off).
- the monitoring functions include amplifier encoder monitoring, amplifier current sensor monitoring, amplifier output voltage monitoring, input voltage monitoring, microcomputer power supply monitoring, microcomputer temperature monitoring, microcomputer failure monitoring, emergency stop signal monitoring, safety IO input signal monitoring, safety IO output signal monitoring, communication monitoring, and direct teaching switch monitoring.
- Amplifier encoder monitoring is used to determine failures in the encoders 35b-37b, 44b, and 55b-57b.
- Amplifier current sensor monitoring is used to determine failures in the current sensor that detects the output current to the motors 35a-37a, 44a, and 55a-57a.
- Amplifier output voltage monitoring is used to determine failures in the motor control unit 71 (switching element).
- Input voltage monitoring is used to monitor the voltage supplied to the robot control device 80 (main board).
- Microcomputer power start is used to monitor the voltage supplied to the microcomputer (robot control unit 81, monitoring unit 82).
- Microcomputer temperature monitoring is used to monitor the ambient temperature of the microcomputer.
- Microcomputer failure monitoring is used to determine failures in the microcomputer.
- Emergency stop signal monitoring is used to determine failures in the emergency stop switch 94.
- Safety IO input signal monitoring monitors input signals other than emergency stop signals that are input to the robot controller 80.
- Safety IO output signal monitoring monitors output signals that are output from the robot controller 80.
- Communication monitoring monitors communications in the communication unit 84.
- Direct teaching switch monitoring monitors failures of the direct teaching switch 61.
- the obstacle detection function includes a torque obstacle detection function, a speed obstacle detection function, a position obstacle detection function, and an external force obstacle detection function.
- the torque obstacle detection function detects a state in which a torque exceeding a set torque is output to each axis or hand of the robot arm 21.
- the speed obstacle detection function detects a state in which each axis or hand of the robot arm 21 operates at a speed exceeding a set speed.
- the position obstacle detection function detects a state in which each axis or hand of the robot arm 21 is positioned outside a set range.
- the external force obstacle detection function detects a state in which each axis or hand of the robot arm 21 is subjected to an external force exceeding an allowable range.
- the safety IO function includes an emergency stop function, a safety IO input function, and a safety IO output function.
- the emergency stop function detects the pressing of the emergency stop switch 94.
- the safety IO input function inputs input signals other than the emergency stop signal to the robot control device 80.
- the safety IO output function transmits an output signal according to the state of the robot 20 from the robot control device 80 to the outside (for example, a laser curtain or another robot).
- the ultrasonic probe 101 of the present embodiment corresponds to the ultrasonic probe of the present disclosure
- the robot arm 21 corresponds to the arm section
- the robot 20 corresponds to the robot
- the tablet terminal 93 corresponds to the wireless operation terminal.
- the ESR controller 92 corresponds to the operation controller.
- the foot switch 91 (first to fourth switches 911 to 914) corresponds to the foot switch.
- the operation mode corresponds to the first mode
- the maintenance mode corresponds to the second mode
- the setting mode corresponds to the third mode.
- the robot control device 80 corresponds to the processing unit.
- the robot 20 is configured as a seven-axis articulated robot capable of translational movement in three directions and rotational movement in three directions.
- the number of axes can be any number.
- the robot 20 may also be configured as a so-called vertical articulated robot or horizontal articulated robot.
- the wireless operation terminal is wirelessly connected to the robot, which reduces restrictions on the location where the wireless operation terminal can be used when performing ultrasonic echo guidance. As a result, it is possible to improve the convenience for the user when using the robot for ultrasonic echo guidance.
- the robot system of the present disclosure includes an operation controller that is manually operated by an operator and can instruct the robot to perform a predetermined operation
- the predetermined operation may include a fine adjustment operation for finely adjusting a point recorded by direct teaching, or a rotation operation for rotating the ultrasonic probe around an axis to change the angle of the ultrasonic probe pressed against the human body.
- the operation controller may include a plurality of operation buttons used to instruct the fine adjustment operation, each of which is associated with a different operation direction in the coordinate system of the robot, and may be capable of reversing the operation directions associated with each of the plurality of operation buttons. This can allow the fine adjustment operation to be performed correctly using the operation controller even if the positional relationship between the operator and the robot changes.
- the robot system of the present disclosure may further include at least one footswitch that is operated by the operator's footswitch, and the footswitch may include a switch for enabling the operation of the operation controller. This can prevent the operation controller from being operated in a location where the operator cannot see the robot, further improving safety.
- the robot system of the present disclosure may also include at least one footswitch that is operated by the operator's footswitch, and the footswitch may include a switch for instructing playback of a point recorded in direct teaching. In this way, ultrasonic echo guidance can be performed appropriately even if the operator's hands are occupied.
- the robot may have a first mode that allows direct teaching and playback of points recorded by direct teaching, a second mode for maintenance, and a third mode that allows various settings, and transitions may be made between the first mode, the second mode, and the third mode.
- a first mode that allows direct teaching and playback of points recorded by direct teaching
- a second mode for maintenance a second mode for maintenance
- a third mode that allows various settings, and transitions may be made between the first mode, the second mode, and the third mode.
- the robot system disclosed herein may include a processing unit that, when multiple points are recorded by direct teaching, sorts the multiple recorded points so that the multiple points are played back in a predetermined direction in order, and the processing unit may obtain a positional relationship between the robot and the human body, and change the predetermined direction based on the obtained positional relationship. In this way, the recorded points can be automatically rearranged even if the order in which the points are recorded does not match the order in which the points are played back.
- This disclosure can be used in the manufacturing industry for robotic systems used in ultrasonic echo guidance.
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
Abstract
Système de robot comprenant : un robot comportant un bras pouvant maintenir une sonde ultrasonore ; et un terminal d'opération sans fil connecté sans fil au robot et utilisé par un opérateur lorsqu'un guidage d'écho ultrasonore est mis en oeuvre à l'aide du robot.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039969 WO2024089812A1 (fr) | 2022-10-26 | 2022-10-26 | Système de robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039969 WO2024089812A1 (fr) | 2022-10-26 | 2022-10-26 | Système de robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024089812A1 true WO2024089812A1 (fr) | 2024-05-02 |
Family
ID=90830392
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/039969 WO2024089812A1 (fr) | 2022-10-26 | 2022-10-26 | Système de robot |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024089812A1 (fr) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60160411A (ja) * | 1984-02-01 | 1985-08-22 | Nec Corp | ロボツト制御装置 |
| JPH02257312A (ja) * | 1989-03-30 | 1990-10-18 | Toyota Motor Corp | ロボットの教示用データ作成方法 |
| US6425865B1 (en) * | 1998-06-12 | 2002-07-30 | The University Of British Columbia | Robotically assisted medical ultrasound |
| JP2009276683A (ja) * | 2008-05-16 | 2009-11-26 | Nikon Corp | コントローラと、これを有する光学装置 |
| CN202397505U (zh) * | 2011-11-30 | 2012-08-29 | 王红卫 | 医疗超声机辅助设备 |
| WO2017126076A1 (fr) * | 2016-01-21 | 2017-07-27 | オリンパス株式会社 | Système de manipulateur médical |
| JP2019165840A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社デンソー | 治療装置 |
| JP2021035507A (ja) * | 2016-09-16 | 2021-03-04 | バーブ サージカル インコーポレイテッドVerb Surgical Inc. | ロボットアーム |
| WO2022153478A1 (fr) * | 2021-01-15 | 2022-07-21 | 株式会社Fuji | Capteur de force, robot collaboratif et robot |
-
2022
- 2022-10-26 WO PCT/JP2022/039969 patent/WO2024089812A1/fr unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60160411A (ja) * | 1984-02-01 | 1985-08-22 | Nec Corp | ロボツト制御装置 |
| JPH02257312A (ja) * | 1989-03-30 | 1990-10-18 | Toyota Motor Corp | ロボットの教示用データ作成方法 |
| US6425865B1 (en) * | 1998-06-12 | 2002-07-30 | The University Of British Columbia | Robotically assisted medical ultrasound |
| JP2009276683A (ja) * | 2008-05-16 | 2009-11-26 | Nikon Corp | コントローラと、これを有する光学装置 |
| CN202397505U (zh) * | 2011-11-30 | 2012-08-29 | 王红卫 | 医疗超声机辅助设备 |
| WO2017126076A1 (fr) * | 2016-01-21 | 2017-07-27 | オリンパス株式会社 | Système de manipulateur médical |
| JP2021035507A (ja) * | 2016-09-16 | 2021-03-04 | バーブ サージカル インコーポレイテッドVerb Surgical Inc. | ロボットアーム |
| JP2019165840A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社デンソー | 治療装置 |
| WO2022153478A1 (fr) * | 2021-01-15 | 2022-07-21 | 株式会社Fuji | Capteur de force, robot collaboratif et robot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10921842B2 (en) | Pedal with sliding and locking mechanisms for surgical robots | |
| US20190216411A1 (en) | Patient Positioner System | |
| US6120433A (en) | Surgical manipulator system | |
| CN110799144B (zh) | 用于远程控制系统中菜单项的选择的触觉反馈的系统和方法 | |
| US9763739B2 (en) | Robotic hand controller | |
| US20060261770A1 (en) | Master-slave manipulator system and this operation input devcies | |
| JPH0871072A (ja) | 手術用マニピュレータシステム | |
| US11511424B2 (en) | Surgical robot and method of manipulating positioner | |
| US20210161606A1 (en) | Controlling a surgical instrument | |
| JP7160904B2 (ja) | ロボット手術システム用高精度機器制御モード | |
| JP7516508B2 (ja) | 移動可能なディスプレイシステム | |
| US20240217115A1 (en) | Robotic surgical system and method for controlling robotic surgical system | |
| WO2024089812A1 (fr) | Système de robot | |
| JP7552991B2 (ja) | トラック上の移動可能なディスプレイユニット | |
| WO2024089815A1 (fr) | Robot | |
| WO2024089813A1 (fr) | Robot | |
| WO2023062737A1 (fr) | Système de diagnostic à ultrasons et procédé de surveillance associé | |
| CN115279292A (zh) | 遥操作终止期间的外科医生脱离检测 | |
| CN221654565U (zh) | 手术机器人主端控制设备和手术机器人系统 | |
| US20240008942A1 (en) | Steerable viewer mode activation and de-activation | |
| WO2024193696A1 (fr) | Robot chirurgical, son procédé de commande, système et support | |
| WO2023248327A1 (fr) | Dispositif de robot et procédé d'aide à l'enseignement direct | |
| EP4454593A1 (fr) | Système d'aide à la chirurgie et robot d'assistance à la chirurgie | |
| WO2023185699A1 (fr) | Robot chirurgical et procédé de commande | |
| JP2023010761A (ja) | カメラ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22963461 Country of ref document: EP Kind code of ref document: A1 |