WO2024053047A1 - 情報処理システム、情報処理方法及びプログラム - Google Patents
情報処理システム、情報処理方法及びプログラム Download PDFInfo
- Publication number
- WO2024053047A1 WO2024053047A1 PCT/JP2022/033716 JP2022033716W WO2024053047A1 WO 2024053047 A1 WO2024053047 A1 WO 2024053047A1 JP 2022033716 W JP2022033716 W JP 2022033716W WO 2024053047 A1 WO2024053047 A1 WO 2024053047A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- earth
- mission
- celestial body
- information processing
- water
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/16—Extraterrestrial cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G7/00—Simulating cosmonautic conditions, e.g. for conditioning crews
Definitions
- the present invention relates to an information processing system, an information processing method, and a program.
- the information processing system includes water resource data corresponding to each point on a celestial body other than the earth, environmental data corresponding to each point on the celestial body other than the earth, rover specifications and/or given information.
- water resource data corresponding to each point on a celestial body other than the earth
- environmental data corresponding to each point on the celestial body other than the earth
- rover specifications and/or given information By using at least one of the setting value, device specifications and/or given setting value, user input value, and given setting value, in response to the user's operation, by executing processing according to the operation. , comprising at least one processor that outputs information regarding the mission on the non-Earth celestial body.
- An information processing system is the information processing system according to the first aspect, wherein the outputted information regarding the mission includes the exploration route of the rover, the energy consumption, and the water splitting device. This information is related to at least one of the amount of water extracted by the fuel cell, the amount of power generated by the fuel cell, and the amount of hydrogen or oxygen produced.
- An information processing system is an information processing system according to the first or second aspect, in which water resource data including water reserves and/or predicted water content of regolith is
- the at least one processor further includes at least one storage device stored for each position on a celestial body, and the at least one processor performs remote sensing using a sensor provided on a satellite orbiting a celestial body other than the earth and/or Water resource data corresponding to each point on the celestial body other than the earth is updated according to the detection results from sensors installed on the surface or underground of the celestial body.
- An information processing system is the information processing system according to the third aspect, wherein the at least one processor uses the updated water resource data to The mission is simulated and information about the simulation results is output.
- An information processing system is the information processing system according to the first aspect, wherein the information regarding the mission is an acquisition cost of water resources at a point specified by the user, and the at least One processor outputs the acquisition cost of water resources at a point specified by the user using environmental data corresponding to each point on the celestial body other than the earth.
- An information processing system is the information processing system according to the first aspect, wherein the device is a water splitting apparatus, the information regarding the mission is information regarding water extraction,
- the at least one processor uses, in addition to the water resource data, specifications and/or given settings of the water splitting device, in response to an operation by the user, by executing a process corresponding to the operation. , output information about water extraction.
- An information processing system is the information processing system according to the sixth aspect, wherein the information regarding water extraction determines the amount of water produced per unit time and/or the target amount of water.
- the water resource data is a predicted water content of the regolith;
- the amount of water generated per unit time and/or the time required to obtain the target amount of water are output using the weight of the regolith that can be processed and the predicted water content of the regolith.
- An information processing system is the information processing system according to the first aspect, in which the at least one processor includes a starting point on the celestial body other than the earth, and at least one processor on the celestial body other than the earth.
- the at least one processor includes a starting point on the celestial body other than the earth, and at least one processor on the celestial body other than the earth.
- An information processing system is the information processing system according to the eighth aspect, in which the at least one processor is configured to operate a route different from the first candidate route and the first candidate route. A difference in maximum slope and/or a difference in distance between one or more second candidate routes is output.
- An information processing system is the information processing system according to the ninth aspect, wherein the at least one processor outputs recommended specifications of a rover corresponding to the second candidate route. .
- An information processing system is an information processing system according to any one of the eighth to tenth aspects, in which the ratio of horizontal traction force to vertical load and slip are determined for each speed of the rover.
- the at least one processor includes at least one storage device in which a relationship between the speed and the speed is stored, and when the set speed of the rover is received from a user, the at least one processor stores the horizontal traction force and the vertical load at each point of movement of the rover.
- a slip rate corresponding to the determined ratio is determined based on the relationship stored in the storage device, and a predicted time or required time to reach the target point is output using the slip rate.
- An information processing system is an information processing system according to any one of the eighth to eleventh aspects, wherein the ratio of horizontal traction force to vertical load is determined for at least the minimum set speed of the rover. and a slip rate, and the at least one processor is configured to store horizontal traction and vertical traction forces in the storage device using information acquired on the non-Earth celestial body. The relationship between the ratio of the load and the slip rate is updated, and the maximum inclination angle at which the rover can climb a slope is output with reference to the updated relationship.
- An information processing system is the information processing system according to the first aspect, wherein the device is one or more fuel cells, and the at least one processor is If the user enters a mission duration in addition to a target point on a celestial body, the amount of power generated by the rover's solar panel at the target point is calculated based on the mission duration, and The amount of hydrogen/oxygen produced by the fuel cell during the daytime during the mission period is output as the amount of electric power.
- the information processing system is the information processing system according to the thirteenth aspect, wherein the at least one processor is configured to store hydrogen generated by a fuel cell during the daytime on the celestial body other than the earth. Outputting the extended period of the mission or the total period of the mission by operating the rover in a low power mode at night on the celestial body other than the Earth using the hydrogen storage amount and the oxygen storage amount obtained from the amount of oxygen. .
- An information processing system is an information processing system according to any one of the first to fourteenth aspects, and includes a storage device in which latitude, longitude, and altitude of the lunar surface are stored in association with each other.
- the at least one processor receives latitude, longitude, and a search range centered on a point at the latitude and longitude from the user, the at least one processor searches the storage device to find a point whose slope falls within a predetermined range. is output as a candidate landing site.
- An information processing system is the information processing system according to any one of the first to fifteenth aspects, wherein the at least one processor is configured to inform the user of the point and period of the celestial body other than the earth. If it is received from , it outputs the mission continuable period in the divided period into which the period is divided.
- An information processing system is an information processing system according to any one of the first to sixteenth aspects, which includes a daytime period of the celestial body other than the earth and/or a daytime period of the celestial body other than the earth.
- the at least one processor includes a storage device in which information about the night period is stored in unit time increments, and the at least one processor refers to the storage device to determine information for each mission start date for each unit time after the mission start date. Obtain whether it is day or night, and if it is daytime, calculate the amount of electricity generated from the solar panel and the amount of oxygen and hydrogen produced by the fuel cell based on the amount of electricity generated, and if it is night, calculate the amount of oxygen and hydrogen produced by the fuel cell. By calculating how long the electricity will last after generating electricity, the system outputs the possible mission duration for each mission start date.
- An information processing system is an information processing system according to any one of the first to seventeenth aspects, in which the daytime period of the celestial body other than the earth and/or the daytime period of the celestial body other than the earth
- the at least one processor includes a storage device in which information about a night period is stored in unit time increments, and when the at least one processor receives latitude, longitude, and mission start date, it refers to the storage device and calculates the information specified by the user. For each point in a predetermined range centering on the latitude and longitude, we obtain whether it is day or night for each unit of time after the mission start date, and if it is day, we calculate the amount of power generated from the solar panel and the amount of power generated. The mission can be continued at each location by calculating the amount of oxygen and hydrogen produced by the fuel cell and calculating how long the electricity will last by generating electricity from the oxygen and hydrogen in the fuel cell at night. Output the period.
- An information processing system is an information processing system according to any one of the first to eighteenth aspects, wherein the latitude, longitude, and altitude of the celestial body other than the earth are stored in association with each other.
- the at least one processor receives the latitude and longitude of a landing candidate on a celestial body other than the earth, the at least one processor refers to the storage device and calculates the latitude and longitude specified by the user as a center. By calculating the landing success probability for each point in a predetermined range according to a predetermined calculation formula, the landing success probability for each point is output.
- An information processing method includes water resource data corresponding to each point on a celestial body other than the earth, environmental data corresponding to each point on the celestial body other than the earth, specifications of a rover and/or a given By using at least one of the setting value, device specifications and/or given setting value, user input value, and given setting value, in response to the user's operation, by executing processing according to the operation. , outputting information regarding a mission on a celestial body other than the earth.
- the program according to the twenty-first aspect of the present invention is configured to provide a computer with water resource data corresponding to each point on a celestial body other than the earth, environmental data corresponding to each point on the celestial body other than the earth, specifications and/or location of the rover.
- a process is executed in accordance with the operation.
- This is a program for executing the step of outputting information regarding a mission on a celestial body other than the earth.
- the user since the user can grasp information regarding the mission in advance, it is possible to make mission planning more efficient.
- FIG. 2 is a conceptual diagram according to the present embodiment.
- FIG. 2 is a conceptual diagram of a flow for realizing efficiency or optimization of mission planning. It is a table showing an example of feedback between the digital lunar virtual space, the earth, and the moon.
- FIG. 2 is a schematic diagram for explaining data collection.
- 1 is a schematic configuration diagram of an information processing system according to an embodiment.
- FIG. 1 is a schematic configuration diagram of a terminal according to the present embodiment.
- 1 is a schematic configuration diagram of a computer system according to this embodiment. This is an example of screen transitions related to water collection displayed on a terminal. This is an example of screen transitions regarding the rover's exploration route displayed on the terminal.
- FIG. 2 is a schematic diagram showing a dynamic model of a wheel.
- FIG. 2 is a schematic cross-sectional view showing an example of the configuration of a rover.
- FIG. 2 is a schematic diagram illustrating water splitting by a fuel cell.
- FIG. 2 is a schematic diagram illustrating electric power generated by a fuel cell. This is an example of screen transition regarding power generation by solar panels. It is a figure showing the angle of sunlight, the angle of a solar panel, and the angle of inclination.
- This is an example of a search screen for landing candidate sites.
- This is an example of a bar graph showing the possible continuation period of a mission for each mission start date and time.
- This is an example of a screen that displays the mission continuation period for each point on the moon in different colors.
- One aspect of the present embodiment has been made in view of the above problems, and one of the objectives is to provide an information processing system, an information processing method, and a program that make it possible to streamline mission planning. do.
- the inventor of the present application applied the conventional digital twin and used various data collected from celestial bodies other than the earth (e.g., the moon, Mars, etc.) to The idea was to create a digital virtual space by reproducing the situation.
- the inventor of the present application then came up with the idea of streamlining or optimizing mission planning by performing simulation, analysis, or optimization of rover exploration, water splitting, fuel cell power generation, etc. in this digital virtual space. did.
- Digital twin is a technology that reproduces various data collected from the real world on a computer.
- a celestial body other than the earth will be described as the moon
- an example of a digital virtual space will be described as a digital lunar surface virtual space.
- FIG. 1 is a conceptual diagram according to this embodiment. As shown in Figure 1, a digital lunar virtual space is created by reproducing the lunar situation on a computer using various data collected from the moon. In addition, the data we lack will be supplemented by data obtained from experiments on Earth.
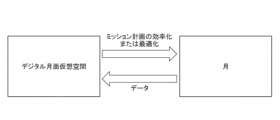
- FIG. 2 is a conceptual diagram of the flow for realizing efficiency or optimization of mission planning.
- Streamline or optimize mission planning by simulating, analyzing, or optimizing rover exploration, water splitting, fuel cell power generation, and more in a digital lunar virtual space on Earth. Meanwhile, data on exploration, water splitting, power generation, etc. from actual missions on the lunar surface will be collected, and the collected data will be reflected in the digital lunar virtual space. This can improve the accuracy of simulation, analysis, or optimization in the digital lunar virtual space, and can make mission planning more efficient or optimized. By repeating such a cycle, the efficiency or optimization of mission planning is improved.
- FIG. 3 is a table showing an example of feedback between the digital lunar virtual space, the earth, and the moon. Examples of feedback will be explained for each of water exploration using rovers, water splitting, and power generation using fuel cells.
- the digital lunar surface virtual space will also be referred to as digital space.
- remote sensing of a satellite orbiting a celestial body other than the Earth and/or detection results by sensors installed on the surface or underground of the celestial body other than the Earth (e.g. the Moon, Mars, etc.) and/or detection results of the celestial body other than the Earth ( For example, infrastructure operation management data for activities on the Moon, Mars, etc.) will be collected.
- a digital virtual space which is a virtual model
- phenomena occurring in the physical space of celestial bodies other than the Earth for example, the moon, Mars, etc.
- This data collection is performed, for example, in real time.
- FIG. 4 is a schematic diagram for explaining data collection.
- Infrastructure operation management data e.g., hydrogen value chain management data
- for activities on the moon is collected in real time, for example, and transmitted to the earth via satellites 101, 102, and 103 orbiting the moon, creating a digital lunar virtual space. It is stored as data.
- the hydrogen value chain management data includes, for example, the amount of hydrogen accumulated at each location on the moon.
- a tank that stores hydrogen (hereinafter also referred to as a hydrogen tank) may be provided with a sensor device.
- the sensor device may include, for example, a sensor that detects the amount of stored hydrogen, a GPS receiver, and a wireless communication module that communicates with the satellites 101, 102, 103.
- the sensor may be a water level gauge that measures the water level of the liquid.
- the satellites 101, 102, and 103 are, for example, GPS (Global Positioning System) satellites. Signals from the satellites 101, 102, and 103 include time data from an atomic clock mounted on the satellite, information on the satellite's ephemeris (orbit), and the like.
- the sensor device receives radio waves from satellites 101, 102, and 103, measures the transmission time, and calculates the distance from the satellite by multiplying the time difference between transmission and reception by the radio wave propagation speed (speed of light). Determine.
- the GPS receiver receives radio waves from three or more satellites 101, 102, and 103, and simultaneously determines accurate reception times and receiver coordinates (points in three-dimensional space) through positioning calculations.
- the principle of GPS positioning is that the speed of light c is constant in a local inertial frame. If both the GPS satellite and the GPS receiver have clocks that can be considered accurate, the distance can be obtained by multiplying the difference between the transmission time (measured value) T and the reception time t by the speed of light c. Letting the position of GPS satellite i be the coordinates (Xi, Yi, Zi) and the position of the GPS receiver be (x, y, z), the following relational expression holds.
- the navigation message signal superimposed on the received data is demodulated and combined with the transmission time.
- This reception time t is the value of the clock of the GPS receiver.
- the three variables (unknowns) x, y, and z, which are the position of the GPS receiver, are found by solving three simultaneous equations in which the coordinates of three different GPS satellites (satellites 101, 102, and 103 in this case) are substituted. It will be done.
- the wireless communication module transmits a combination of the determined position of the GPS receiver (i.e., the position of the hydrogen tank) and the detected amount of hydrogen to the satellites 101, 102, and 103, and the satellites 101, 102, and 103 transmit the pair to the earth. and stored as data in the digital lunar surface virtual space.
- the amount of hydrogen accumulated at each location on the moon can be managed on Earth without delay, for example.
- the reception time t must also be an unknown quantity, so these four unknowns can be found by receiving from four or more satellites.
- the amount of water resources stored on the moon is estimated by remote sensing using sensors installed on satellites 101 to 103 orbiting the moon.
- the satellites 101 to 103 may be provided with a processor, an irradiation mechanism (for example, synthetic aperture radar (SAR)) that irradiates electromagnetic waves, and a sensor, and the electromagnetic waves irradiated from the irradiation mechanism are caused by the lunar surface.
- Sensors mounted on the satellites 101 to 103 may estimate the amount of water resources by observing the reflected electromagnetic waves.
- the irradiation mechanism is SAR, microwave or millimeter waves may be irradiated.
- the irradiation mechanism may irradiate terahertz waves.
- the satellites 101 to 103 may be provided with visible light cameras or infrared cameras, for example.
- the lunar surface may be imaged with a visible light camera or an infrared camera, and the amount of water resources may be estimated from the captured image.
- the estimation of the amount of water resources may be performed by the processors of the satellites 101 to 103, or may be performed by the processor 26 of the computer system 2 on the earth.
- the set of the reflection position and the amount of water resources on the lunar surface is transferred to the earth by the satellites 101, 102, 103, and stored in a digital lunar surface virtual image in a storage device on the earth (for example, the storage device 23 of the computer system 2). Accumulated as part of spatial data.
- water resource data at each location on the moon can be managed on Earth without delay, for example.
- the amount of water resources may be detected by a sensor device installed on the surface or underground of the moon, in which case the sensor device includes a sensor for detecting the amount of water resources and 103 and a GPS receiver. Thereby, the amount of water resources detected by the sensor and the position determined by the GPS receiver may be transmitted to the satellites 101-103 by the wireless communication module.
- the amount of water resources detected by the sensor and the position determined by the GPS receiver are transferred to the earth via satellites 101, 102, 103, and stored in a storage device on earth (for example, a computer system 2).
- the data is stored in the storage device 23) as part of the data of the digital lunar surface virtual space.
- FIG. 5 is a schematic configuration diagram of the information processing system according to this embodiment.
- the information processing system S includes terminals 1-1, . . . , 1-N (N is a natural number) and a computer system 2.
- Each of the terminals 1-1, . . . , 1-N is communicatively connected to the computer system 2 via a communication network CN.
- the terminals 1-1, . . . , 1-N are, for example, smartphones, tablet terminals, notebook computers, or computers such as personal computers.
- the terminals 1-1, . . . , 1-N will also be collectively referred to as terminal 1.
- FIG. 6 is a schematic configuration diagram of the terminal of this embodiment.
- the terminal 1 includes an input interface 11, a communication module 12, a storage device 13, a memory 14, an output interface 15, and a processor 16.
- the terminal 1 is described here as having one processor 16 as one aspect, it may have a plurality of processors, that is, it is sufficient to have one or more processors.
- the terminal 1 is described here as having one storage device 13 as one aspect, it may have a plurality of storage devices, that is, it is sufficient to have one or more storage devices.
- the input interface 11 receives input from the user and outputs an input signal to the processor 16 according to the received input.
- the communication module 12 is connected to the communication network CN and communicates with the computer system 2. This communication may be wired or wireless.
- the storage device 13 is, for example, a storage, and stores programs for the processor 16 to read and execute.
- Memory 14 temporarily holds data and programs.
- the memory 14 is a volatile memory, such as RAM (Random Access Memory).
- the output interface 15 can be connected to, for example, a display 17 and can output, for example, a video signal to the display 17.
- the processor 16 loads a program from the storage device 13 into the memory 14 and executes a series of instructions included in the program, thereby executing various processes.
- the display 17 will be described as being externally attached to the terminal 1, it may be built into the terminal 1.
- FIG. 7 is a schematic configuration diagram of the computer system of this embodiment.
- the computer system 2 includes an input interface 21, a communication module 22, a storage device 23, a memory 24, an output interface 25, and a processor 26.
- the computer system 2 is described here as having one processor 26 as one aspect, it may have a plurality of processors, that is, it may include one or more processors.
- the computer system 2 will be described here as having one storage device 23 as one aspect, it may have a plurality of storage devices, that is, it may include one or more storage devices.
- the input interface 21 receives input from the administrator of the computer system 2 (for example, an employee of a management organization), and outputs an input signal to the processor 26 in accordance with the received input.
- the communication module 22 is connected to the communication network CN and communicates with each of the terminals 1-1, . . . , 1-N. This communication may be wired or wireless.
- the storage device 23 is, for example, a storage, and stores programs and various data for the processor 26 to read and execute.
- Memory 24 temporarily holds data and programs.
- the memory 24 is a volatile memory, such as RAM (Random Access Memory).
- the output interface 25 can be connected to an external device and can output a signal to the external device.
- the processor 26 loads a program from the storage device 23 into the memory 24 and executes a series of instructions included in the program, thereby executing various processes.
- processor 26 includes water resources data corresponding to each point on a celestial body other than Earth (e.g., the Moon), environmental data corresponding to each point on said celestial body other than Earth, rover specifications and/or given settings. a value, a specification of the device (e.g., water splitter, fuel cell, etc.) and/or a given setting value, a value input by the user, a given setting value, and in response to the operation by the user.
- information regarding the mission on the celestial body other than the earth is output.
- the information regarding the mission output here may be the acquisition cost of water resources at the point specified by the user.
- the processor 26 may output the acquisition cost of water resources at the point specified by the user using environmental data (eg, topography) corresponding to each point on the celestial body other than the earth. For example, the longer the distance from the start point to the target point, the greater the cost of acquiring water resources. In addition to or in place of this, for example, the steeper the slope of the terrain from the start point to the target point, the higher the cost of acquiring water resources.
- the storage device 23 stores water resource data including water reserves and/or predicted water content of regolith for each location on a celestial body other than the earth.
- the processor 26 responds to remote sensing by a sensor installed on a satellite orbiting a celestial body other than the earth (for example, the moon) and/or a detection result by a sensor installed on the surface or underground of the celestial body other than the earth. Then, the water resource data corresponding to each point on a celestial body other than the earth (for example, the moon) is updated.
- the processor 26 uses the updated water resource data to simulate a mission on a celestial body other than the earth (eg, the moon) and outputs information regarding the simulation results.
- FIG. 8 is an example of screen transition regarding water collection displayed on the terminal.
- the latitude and longitude of the target spot for water collection on the lunar surface the mission start time (e.g. start date), the end time (e.g. end date), the maximum efficiency of the water splitter, the processing The speed can be entered by the user. Thereby, the user using the terminal 1 can set these parameters by inputting them.
- a preset water reserve percentage is displayed as a numerical value (for example, 250 ppm). Further, as shown in screen G2, the output of this water splitting device (for example, 198.625 ppm) is displayed. The output of this water splitting device is the product of a preset water reserve percentage and the maximum efficiency of the water splitting device, and is calculated by the processor 26.
- the storage device 23 stores water resource data. Specifically, for example, the storage device 23 stores records of sets of water reserves and positions on the moon (for example, latitude and longitude).
- the processor 26 of the computer system 2 refers to the storage device 23, obtains the amount of water reserves at each point in a predetermined range based on the latitude and longitude of the target point input by the user, and calculates the amount of water in the three-dimensional map. Information visualizing the area where water is buried may be output.
- the processor 26 uses the specifications and/or given settings of the water splitting device in addition to the water resource data to perform processing in accordance with the user's operation. Information regarding water extraction may also be output.
- the information regarding the mission may be the amount of water generated per unit time and/or the time required to obtain the target amount of water.
- the processor 26 uses the efficiency of the water decomposition device that extracts water from the regolith, the weight of regolith that can be processed per unit time of the water decomposition device, and the predicted water content of the regolith included in the water resource data.
- the amount of water produced per hour and/or the time required to obtain the target amount of water may be output.
- FIG. 9 is an example of screen transitions regarding the rover's exploration route displayed on the terminal.
- the user can specify the starting point and target point of the rover on the three-dimensional map.
- the user can input the latitude and longitude of one or more points of interest (ie, relay points) desired by the user.
- a line of the first candidate route passing through the point of interest is displayed on a three-dimensional map, and the maximum slope angle and route length of the first candidate route are displayed as route specifications. be done.
- a "recommend" button is pressed on screen G3, the screen changes to screen G4.
- a second candidate route is displayed, for example, as a line in a different color.
- the maximum inclination angle and route length of the second candidate route are displayed on screen G4.
- the difference in maximum inclination angle of the second candidate route with respect to the first candidate route, and the difference in route length of the second candidate route with respect to the first candidate route are displayed.
- information on necessary changes is displayed on screen G4. Examples of necessary change information include the following: "The rover needs to be able to climb slopes of up to 15.3 degrees, which is +0.8 degrees above the current specification. If the new requirements are met, new shorter routes will be possible. "This will reduce travel time and allow more time for scientific observations.”
- the types of components for example, motors, gearboxes, etc.
- the types of components that affect movement on the second candidate route are displayed.
- recommended components for movement along the second candidate route are displayed for each component type (eg, motor, gearbox, etc.).
- An example of the process for displaying the first candidate route on screen G3 is as follows.
- the altitude at each point on the moon is stored in the storage device 23 of the computer system 2.
- the processor 26 of the computer system 2 allows the rover to ascend using preset default rover specifications. Search for a route from the rover's starting point to the target point, passing through all the relay points desired by the user, within the range of the maximum slope possible. Then, as a result of the search, the processor 26 outputs information for displaying the first candidate route that satisfies the conditions to the terminal 1.
- the terminal 1 thereby receives this information, and the processor 16 of the terminal 1 uses this information to control the display of the first candidate route.
- the first candidate route on the screen G3 is displayed on the terminal 1.
- An example of the process for displaying the second candidate route on screen G4 and the rover's recommended components for the second candidate route is as follows.
- the altitude at each point on the moon is stored in the storage device 23 of the computer system 2.
- the storage device 23 stores, for example, the specifications of a combination of components and the maximum slope that can be climbed with the combination of components in association with each other.
- the processor 26 of the computer system 2 determines the shortest route among the routes from the starting point of the rover to the target point within the range of the maximum slope that can be climbed according to the specifications of the combination of components recorded in the storage device 23. Explore. Then, as a result of the search, the processor 26 displays a second candidate route that satisfies the conditions and information (for example, model number, specifications, etc.) that specifies a combination of components that can climb the second candidate route.
- the information for this purpose is output to terminal 1.
- the terminal 1 receives this information, and the processor 16 of the terminal 1 uses this information to identify a second candidate route , information ( For example, display the model number, specifications, etc.).
- screen G4 is displayed on terminal 1.
- the processor 26 moves from the start point to the target point.
- At least one of the first candidate route to the point, the distance of the first candidate route, and the maximum slope in the first candidate route may be output.
- the processor 26 may also output a difference in maximum slope and/or a difference in distance between the first candidate route and one or more second candidate routes different from the first candidate route. . Furthermore, the processor 26 may output recommended specifications of the rover corresponding to the second candidate route.
- FIG. 10 is a schematic diagram showing a dynamic model of the wheel. If r is the wheel radius, b is the wheel width, ⁇ is the normal stress, ⁇ is the shear stress, ⁇ is the wheel angular velocity, W is the vertical load, DP is the net traction force, and ⁇ is the rotation angle of the wheel, then
- the driving torque T, the horizontal traction force Fx , and the vertical load Fz are expressed by the following equations, where ⁇ f is the angle at which contact is started, and ⁇ r is the angle at which the contact begins.
- FIG. 11 is a graph showing an example of the relationship between the ratio of horizontal traction force to vertical load and slip ratio.
- the ratio ⁇ of horizontal traction force to vertical load takes the maximum value when the speed of the rover is 1 km/h, and the value at that time is 0.281.
- the inclination angle ⁇ in this case is calculated as tan ⁇ 1 ⁇ and is approximately 15.7 degrees, so the maximum slope-climbing angle is 15.7 degrees.
- the processor 26 may update the relationship.
- the processor 26 may also update the maximum slope climbing angle. That is, the storage device 23 may store the relationship between the ratio of the horizontal traction force to the vertical load and the slip ratio for the lowest set speed of the rover (for example, 1 km/h). In this case, the processor 26 updates the relationship between the ratio of the horizontal traction force to the vertical load and the slip ratio in the storage device 23 using information acquired on a celestial body other than the earth (for example, the moon), and The maximum inclination angle at which the rover can climb a hill may be output by referring to the relationship.
- the storage device 23 may store the relationship between the ratio of the horizontal traction force to the vertical load and the slip ratio for each speed of the rover.
- the travel distance can be determined by multiplying the rover's travel speed, slip rate, and rover travel time. Since the distance to the target point is known, the time required to reach the target point can be estimated by dividing the distance to the target point by the product of the rover's travel speed and slip rate. Furthermore, by adding this required time to the current time, the predicted time of arrival at the target point can be estimated.
- FIG. 12 is a schematic cross-sectional view showing an example of the configuration of the rover 3.
- the rover 3 includes a housing 31, wheels 32-1, 32-2, and a solar panel 33 provided on the surface (here, the side surface as an example) of the housing 31.
- the rover 3 further includes at least one fuel cell 34, a water tank 35, a hydrogen tank 36, an oxygen tank 37, a processor 38, and a motor 39 for driving wheels 32-1 and 32-2, which are housed in the housing 31. has been done.
- the processor 38 controls at least the fuel cell 34 and the motor 39.
- FIG. 13A is a schematic diagram illustrating water splitting by a fuel cell.
- electric power generated by a solar panel 33 on the moon is supplied to a fuel cell 34, and the fuel cell 34 uses this electric power to decompose water into hydrogen and oxygen.
- Oxygen is stored in an oxygen tank 37.
- hydrogen may be stored in the hydrogen tank 36 under pressure
- oxygen may be stored in the oxygen tank 37 under pressure.
- hydrogen and oxygen may be in a gaseous state or in a liquid state.
- water splitting is carried out using electricity generated, for example, by solar panels on board the rover, and hydrogen and oxygen are stored.
- FIG. 13B is a schematic diagram illustrating electric power generated by a fuel cell. As shown in FIG. 13B, fuel cell 34 generates water and electricity from hydrogen and oxygen. This generated power is supplied to the processor 38 and motor 39.
- FIG. 14 is an example of screen transition regarding power generation by the solar panel.
- screen G5 of terminal 1 in FIG. The minimum required power generation amount per square meter), the power consumption when the rover is in low power mode, and the water volume of the water tank (for example, the water tank 35 of the rover 3) are displayed so as to be inputtable. In this way, the user of terminal 1 can set the above parameters.
- the "send" button on screen G5 of terminal 1 in FIG. 14 is pressed, the screen changes to screen G6.
- the amount of power generated per unit area (for example, the amount of power generated per square meter) by the solar panels at each point is displayed in a color map on a map around the target area on the lunar surface. . Further, a point selected by the processor 26 from among the minimum required power generation amount per square meter inputted on the screen G5 is displayed, for example, as a cross mark.
- the storage device 23 may store the amount of power generated per unit area and the altitude at each point on the lunar surface. Then, the processor 26 refers to the storage device 23 and selects a point that is as flat as possible and has no obstacles around it among the points that satisfy the minimum required power generation amount per square meter input on the screen G5. good.
- the maximum efficiency and power requirements (for example, the minimum required amount of power generation per square meter) as the power generation specifications of the solar panel, and the latitude and longitude of the target area on the lunar surface, entered on screen G5, are displayed. .
- a possible mission extension period is displayed by using the fuel cell power generation during the lunar night and the low power mode during the lunar night.
- the low power mode is a mode that consumes less power than the normal power mode, and for example, it is necessary to maintain the temperature of the rover's electronic equipment at the lowest tolerable temperature (for example, -40 degrees Celsius) during the night on the lunar surface. It is electricity.
- the mission period is 9 days, 10 hours and 30 minutes
- the mission period is 9 days, 10 hours and 30 minutes
- the low power mode is used. It has been shown that the mission period can be extended by three days by doing so.
- ⁇ How to calculate mission extension period> For example, on the moon, day and night change every 14 days. During the night, solar panels cannot generate electricity, so fuel cells will generate electricity to maintain the power supply.
- the power consumption per unit time in the normal mode is set in advance, and the power consumption per unit time in the low power mode is input by the user on screen G5.
- the water stored in the water tank 35 is electrolyzed using the electric power generated by the solar panel 33 to store hydrogen and oxygen.
- solar panels cannot generate electricity from sunlight.
- the temperature is very low, so if the rover's electronic equipment gets very cold, there is a risk that it will malfunction or malfunction. Therefore, it is necessary to maintain the temperature of the rover's electronic equipment above the minimum serviceable temperature (for example, -40°C), but the problem is how to procure power for that period. Therefore, during the lunar night period, it uses electricity generated when water is synthesized from stored hydrogen and oxygen.
- FIG. 15 is a diagram showing the angle of sunlight, the angle of the solar panel, and the angle of inclination.
- ⁇ sun is the angle of the sun's lunar surface with respect to the ground surface
- ⁇ slope is the angle of the slope on which the rover is located
- ⁇ panel is the installation angle of the solar panel.
- Q sun is the energy per unit area of sunlight
- A is the area of the solar panel
- F sun is the reduction coefficient of output due to the angle of the sun ⁇ sun
- F panel is the reduction coefficient of power due to the angle of the solar panel ⁇ panel
- F slope is the power reduction coefficient due to the slope angle ⁇ slope
- ⁇ is the coefficient (energy absorption rate) due to the surface finish of the solar panel.
- the energy Q received by the solar panel is expressed by the following formula.
- the conversion efficiency of the panel from solar power generation to electricity is ⁇
- the amount of power generated by the solar panel Q electric is expressed by the following formula.
- the processor 26 performs the above calculation to generate information indicating that seven or more fuel cells are installed as the rover configuration, or information necessary for the rover configuration. Information for presenting the number of fuel cells may be output.
- the rover 3 has seven fuel cells.
- the amount of hydrogen consumed per unit time x (ml/h) and the amount of oxygen per unit time y (ml/h) consumed during power generation by the fuel cell the amount of hydrogen stored in the hydrogen tank 36 be X, and the amount of oxygen in the oxygen tank 37.
- the operable period Z in the low power mode using the fuel cell as the power source is expressed by the following equation.
- the processor 26 may output the operable period Z in the low power mode as the mission extension period.
- the processor 26 can generate a target point by the rover's solar panel at the target point based on that date.
- the amount of electric power may be calculated, and the amount of hydrogen/oxygen generated by the fuel cell during the daytime during the mission period using the amount of electric power on a celestial body other than the earth (for example, the moon) may be output.
- the processor 26 uses the hydrogen storage amount and the oxygen storage amount obtained from the amount of hydrogen/oxygen generated by the fuel cell during the daytime of the celestial body other than the earth (for example, the moon) to The extended period of the mission or the total period of the mission when the rover is operated in low power mode at night may be output.
- FIG. 16 is an example of a search screen for landing candidate sites.
- the latitude and longitude, and the radius of a circle centered on a point at the latitude and longitude for specifying the search range are displayed so that the user can input them.
- the "Search" button is pressed, a search is executed.
- a list of candidate points that fit within a circle of the specified radius centered on the point of the specified latitude and longitude is displayed.
- the latitude, longitude, and altitude of the lunar surface may be stored in association with each other in the storage device 23.
- the processor 26 receives a latitude, a longitude, and a search range centered on a point at the latitude and longitude from the user, the processor 26 searches the storage device 23 to find a point whose slope falls within a predetermined range. It may also be output as a landing candidate site. As a result, flat points that meet the criteria are output. In this way, when the conditions desired by the user are accepted, a point on a celestial body other than the earth that satisfies the conditions is searched for, and the search results are output.
- ⁇ Mission continuation period> Next, the period during which the mission can be continued will be explained. Since day and night change every 14 days on the moon, the length of time a mission can continue varies depending on the start date and time of the mission. To facilitate understanding of the mission continuation period, the mission continuation period is displayed for each mission start date and time.
- FIG. 17 is an example of a bar graph showing the mission continuable period for each mission start date and time.
- latitude, longitude, start date and end date of a period, and altitude on the lunar surface are displayed so as to be inputtable.
- the "Send" button is pressed on screen G9 in FIG. 17, a bar graph is displayed on screen G9 in FIG.
- the vertical axis is the period during which the mission can be continued, and the horizontal axis is the date.
- the bar graph shows the possible continuation period of each mission if the mission starts on the 1st of each month in 2022. It is shown. In this way, the period during which a mission can be continued varies depending on the date on which the mission starts.
- the storage device 23 stores information about the daytime period on the moon and/or the nighttime period on the moon in units of time (for example, one hour).
- the processor 26 refers to the storage device 23 and obtains, for each mission start date, whether it is day or night for each unit of time (for example, 1 hour) after the mission start date, and if it is day, Calculate the amount of electricity generated from the solar panel and the amount of oxygen and hydrogen produced by the fuel cell based on the amount of electricity generated, and at night, calculate how long the electricity will last by generating electricity from oxygen and hydrogen with the fuel cell. Outputs the mission continuation period for each mission start date.
- FIG. 18 is an example of a screen that includes a graph displaying the mission continuation period for each point on the lunar surface in different colors.
- the horizontal and vertical axes of the graph on screen G11 in FIG. 18 represent distance.
- the graph on screen G11 in FIG. 18 shows in color the mission continuation period at each point of 500 km square centered on the latitude and longitude specified by the user.
- the mission continuation period is based on the mission start date specified by the user.
- the storage device 23 stores information about the daytime period on the moon and/or the nighttime period on the moon in units of time (for example, one hour).
- the processor 26 receives latitude, longitude, and mission start date, it refers to the storage device 23 and selects a predetermined range (for example, 500 km square) centered on the latitude and longitude specified by the user. For each point, acquire whether it is day or night for each unit of time (for example, 1 hour) after the mission start date, and if it is day, the amount of power generated from the solar panel and the amount of power generated by the fuel cell are generated.
- the processor 26 By calculating the amount of oxygen and hydrogen, and at night, generating electricity from oxygen and hydrogen using fuel cells and calculating how long the electricity will last, it outputs the possible duration of the mission for each location. Then, the processor 26 outputs, for example, information for displaying the mission continuation period at each point in a graph.
- FIG. 19 is an example of a screen including a graph displaying the landing success probability at each point on the lunar surface in different colors.
- the horizontal and vertical axes of the graph on screen G12 in FIG. 19 represent distance.
- the graph on screen G12 in FIG. 19 shows, in color, the landing success probability at each point within a predetermined range centered on the latitude and longitude specified by the user. Further, in the graph in screen G12 of FIG. 19, candidate landing sites are indicated by crosses.
- the latitude, longitude, and altitude of the moon are stored in association with each other in the storage device 23.
- the processor 26 receives the latitude and longitude of a landing candidate on the moon, it refers to the storage device 23 and selects each point in a predetermined range centered on the latitude and longitude specified by the user. By calculating the landing success probability for each point according to a predetermined calculation formula, the landing success probability is output for each point.
- the processor 26 may refer to the storage device 23 to identify the position and range of a crater.
- the processor 26 when the processor 26 receives the latitude and longitude of a landing candidate on the moon, the processor 26 refers to the storage device 23 and selects a location where the landing success probability exceeds a predetermined threshold and excludes the location of a crater. At least one landing candidate site may be selected and output from among the sites according to predetermined selection rules (for example, a site with the highest probability of success).
- the information processing system includes water resource data corresponding to each point on a celestial body other than the earth, environmental data corresponding to each point on the celestial body other than the earth, rover specifications and/or given settings.
- water resource data corresponding to each point on a celestial body other than the earth
- environmental data corresponding to each point on the celestial body other than the earth
- rover specifications and/or given settings By using at least one of a value, a device specification and/or a given setting value, a value input by the user, and a given setting value, the calculation according to the operation is performed according to the operation by the user.
- At least one processor outputting information regarding a mission on a celestial body other than Earth.
- the computer system 2 described in the above-described embodiment may be configured with hardware or software.
- a program for realizing at least part of the functions of the computer system 2 may be stored in a computer-readable recording medium, and the computer may read and execute the program.
- the recording medium is not limited to a removable one such as a magnetic disk or an optical disk, but may also be a fixed recording medium such as a hard disk device or memory.
- a program that implements at least some of the functions of the computer system 2 may be distributed via a communication line (including wireless communication) such as the Internet.
- the program may be distributed in an encrypted, modulated, or compressed state via a wired or wireless line such as the Internet, or stored in a recording medium.
- the computer system 2 may be operated by one or more information devices.
- one of them may be a computer, and the computer may execute a predetermined program to realize the function as at least one means of the computer system 2.
- all processes may be automatically controlled by a computer.
- each step may be performed by a computer, while progress control between steps may be performed manually.
- at least a portion of all the steps may be performed manually.
- the present invention is not limited to the above-mentioned embodiments as they are, and at the implementation stage, the constituent elements can be modified and embodied without departing from the spirit of the invention.
- various inventions can be formed by appropriately combining the plurality of components disclosed in the above embodiments. For example, some components may be deleted from all the components shown in the embodiments. Furthermore, components from different embodiments may be combined as appropriate.
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024545362A JPWO2024053047A1 (https=) | 2022-09-08 | 2022-09-08 | |
| PCT/JP2022/033716 WO2024053047A1 (ja) | 2022-09-08 | 2022-09-08 | 情報処理システム、情報処理方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/033716 WO2024053047A1 (ja) | 2022-09-08 | 2022-09-08 | 情報処理システム、情報処理方法及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024053047A1 true WO2024053047A1 (ja) | 2024-03-14 |
Family
ID=90192500
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/033716 Ceased WO2024053047A1 (ja) | 2022-09-08 | 2022-09-08 | 情報処理システム、情報処理方法及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2024053047A1 (https=) |
| WO (1) | WO2024053047A1 (https=) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0631657A (ja) * | 1992-07-16 | 1994-02-08 | Fujitsu Ltd | 移動ロボット制御方式 |
| US20170254657A1 (en) * | 2016-03-06 | 2017-09-07 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Traverse and trajectory optimization and multi-purpose tracking |
-
2022
- 2022-09-08 JP JP2024545362A patent/JPWO2024053047A1/ja active Pending
- 2022-09-08 WO PCT/JP2022/033716 patent/WO2024053047A1/ja not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0631657A (ja) * | 1992-07-16 | 1994-02-08 | Fujitsu Ltd | 移動ロボット制御方式 |
| US20170254657A1 (en) * | 2016-03-06 | 2017-09-07 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Traverse and trajectory optimization and multi-purpose tracking |
Non-Patent Citations (1)
| Title |
|---|
| SHIMADA JUN, KAZUYA SUZUKI, MASARU KOGA, TOSHIHIRO IDEHARA, JUN NAKAJIMA, KAZUKI KARIYA, NATSU FUJIOKA: "Environmental Condition Analysis and Data Acquisition Plan for Future Lunar Exploration Missions", PROCEEDINGS OF 65TH SPACE SCIENCES AND TECHNOLOGY CONFERENCE, 9 November 2021 (2021-11-09), pages JSASS - 2021, XP093146876 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024053047A1 (https=) | 2024-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Scherliess et al. | Utah State University global assimilation of ionospheric measurements Gauss‐Markov Kalman filter model of the ionosphere: Model description and validation | |
| Retterer | Physics‐based forecasts of equatorial radio scintillation for the Communication and Navigation Outage Forecasting System (C/NOFS) | |
| Jouvet et al. | High-endurance UAV for monitoring calving glaciers: Application to the Inglefield Bredning and Eqip Sermia, Greenland | |
| Dutta et al. | Postflight analysis of atmospheric properties from mars 2020 entry, descent, and landing | |
| Rodell | 11 Satellite Gravimetry Applied to Drought Monitoring | |
| Yue et al. | A feasibility study of the radio occultation electron density retrieval aided by a global ionospheric data assimilation model | |
| Sutton et al. | Toward accurate physics‐based specifications of neutral density using GNSS‐enabled small satellites | |
| Fong | Volatiles investigating polar exploration rover | |
| Koblinsky et al. | The future of spaceborne altimetry. Oceans and climate change: A long-term strategy | |
| JP2009220622A (ja) | 中高度人工衛星捕捉方法及び装置 | |
| Fong et al. | Robotic site survey at Haughton Crater | |
| Carr et al. | Geologic traverse planning for planetary EVA | |
| WO2024053047A1 (ja) | 情報処理システム、情報処理方法及びプログラム | |
| Hoffman et al. | A low-cost autonomous rover for polar science | |
| Johnson et al. | An integrated traverse planner and analysis tool for planetary exploration | |
| Lapucha | Precise GPS/INS positioning for a highway inventory system | |
| Cheung et al. | Improved observational coverage of the solar magnetic field | |
| Fong | Volatiles Investigating Polar Exploration Rover (presentation at MaGIC 2025) | |
| Fong | Volatiles Inspecting Polar Exploration Rover | |
| Stoker et al. | Two dogs, new tricks: A two‐rover mission simulation using K9 and FIDO at Black Rock Summit, Nevada | |
| Behar et al. | Polar traverse rover development for Mars, Europa and Earth | |
| CN115033553B (zh) | 一种基于cs架构的水下滑翔机海上试验数据库 | |
| Kim et al. | A Practical Approach for Real-Time DOV Compensation in an Embedded Computer of an INS Using Multi-Layer Perceptron | |
| Yao et al. | An Algorithm for Estimating Thermospheric Density Using LEO Dual-Frequency GNSS Receivers: Design, Uncertainty Analysis, and Validation | |
| Fong | NASA Ames Lunar Rover Technologies |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22958126 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024545362 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22958126 Country of ref document: EP Kind code of ref document: A1 |