WO2024047987A1 - 舵取機 - Google Patents
舵取機 Download PDFInfo
- Publication number
- WO2024047987A1 WO2024047987A1 PCT/JP2023/020766 JP2023020766W WO2024047987A1 WO 2024047987 A1 WO2024047987 A1 WO 2024047987A1 JP 2023020766 W JP2023020766 W JP 2023020766W WO 2024047987 A1 WO2024047987 A1 WO 2024047987A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- hydraulic
- steering gear
- cylinders
- ram
- attached
- Prior art date
Links
- 230000004044 response Effects 0.000 claims description 8
- 238000001514 detection method Methods 0.000 claims description 7
- 238000006073 displacement reaction Methods 0.000 claims description 7
- 239000000463 material Substances 0.000 claims description 6
- 230000008859 change Effects 0.000 claims description 2
- 241000380131 Ammophila arenaria Species 0.000 abstract 2
- 239000010720 hydraulic oil Substances 0.000 description 16
- 238000009429 electrical wiring Methods 0.000 description 7
- 238000000926 separation method Methods 0.000 description 7
- 238000009434 installation Methods 0.000 description 4
- 239000012530 fluid Substances 0.000 description 3
- 239000007858 starting material Substances 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/06—Steering by rudders
- B63H25/08—Steering gear
- B63H25/14—Steering gear power assisted; power driven, i.e. using steering engine
- B63H25/26—Steering engines
- B63H25/28—Steering engines of fluid type
- B63H25/30—Steering engines of fluid type hydraulic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/08—Servomotor systems without provision for follow-up action; Circuits therefor with only one servomotor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/17—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors using two or more pumps
Definitions
- the present disclosure relates to a steering gear.
- Patent Document 1 discloses a steering gear 100 as shown in FIG.
- the steering gear 100 includes a steering gear main body 110 and a control device 120.
- the steering gear main body 110 includes a rudder handle 111 fixed to the rudder shaft 200, a ram 112 that engages with the rudder handle 111, and two cylinders 113 into which both ends of the ram 112 are inserted.
- the steering gear main body 110 includes a hydraulic unit 114 that constitutes a hydraulic circuit together with a cylinder 113.
- the hydraulic unit 114 includes an electromagnetic switching valve as a hydraulic device that operates in response to an electric signal, and this electromagnetic switching valve is controlled by the control device 120.
- the control device 120 is connected to the operating device 130.
- the control device 120 is disposed at a distance from the steering gear body 110, so the electrical wiring between the steering gear body 110 and the control device 120 is relatively small. becomes longer.
- an object of the present disclosure is to provide a steering gear that can shorten the electrical wiring between the steering gear body and the control device.
- the present disclosure provides a Rapson slide-type steering gear body including at least one hydraulic device that operates in response to an electric signal, and the at least one hydraulic device attached to the steering gear body.
- a steering gear is provided, comprising at least one control device for controlling the steering gear.
- the present disclosure provides a Rapson slide-type steering gear body including at least one hydraulic device that operates in response to an electric signal;
- a steering gear is provided, including at least one control device that controls two hydraulic devices.
- a steering gear is provided in which the electrical wiring between the steering gear body and the control device can be shortened.
- FIG. 3 is a hydraulic circuit diagram of the steering gear.
- FIG. 2 is an enlarged view of the main part of FIG. 1.
- FIG. It is a front view of the said principal part.
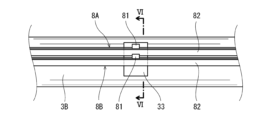
- 6 is a cross-sectional view taken along line VI-VI in FIG. 5.
- FIG. 3 is an enlarged view of the area around the electric motor in FIG. 2.
- FIG. It is a figure which shows another attachment method of a control device.
- 9A and 9B are a front view and a side view, respectively, of the electric motor and surroundings of a steering gear according to a modified example.
- FIG. 2 is a perspective view of a conventional steering gear.
- FIGS. 1 to 3 show a steering gear 1 according to an embodiment.
- the steering gear 1 includes a steering gear main body 11 of the Rapson slide type and at least one control device 9 attached to the steering gear main body 11.
- four control devices 9A to 9D are attached to the steering gear main body 11.
- the steering gear main body 11 includes a rudder handle 2 fixed to the rudder shaft 15 and two hydraulic actuators that swing the rudder handle 2.
- One hydraulic actuator includes a first ram 3A and two first cylinders 4A, 4B, and the other hydraulic actuator includes a second ram 3B and two second cylinders 4C, 4D.
- the steering gear main body 11 may include only one hydraulic actuator.
- the rudder handle 2 includes a cylindrical portion 21 into which the rudder shaft 15 is inserted, and a pair of arm portions 22 that protrude from the side surface of the cylindrical portion 21 in opposite directions.
- Each arm portion 22 includes a pair of opposing walls 23 that face each other in the vertical direction with the corresponding ram (first ram 3A or second ram 3B) in between, and an engagement groove 24 is formed at the tip of these opposing walls 23. It is formed.
- the first ram 3A and the second ram 3B are arranged parallel to each other so as to sandwich the rudder shaft 15 therebetween.
- Pins 31 that protrude upward and downward are provided at the centers of the first ram 3A and the second ram 3B, and these pins 31 engage with the engagement groove 24 of the rudder handle 2 via rollers 32. There is.
- Both ends of the first ram 3A are inserted into the first cylinders 4A and 4B, respectively, and both ends of the second ram 3B are inserted into the second cylinders 4C and 4D, respectively.
- the direction toward the ram of each cylinder will be referred to as the front, and the opposite direction will be referred to as the rear.
- the front parts of the first cylinder 4A and the second cylinder 4C that are adjacent to each other are connected by a connecting plate 13, and the front parts of the first cylinder 4B and the second cylinder 4D that are adjacent to each other are connected to each other by a connecting plate 12.
- the first cylinders 4A, 4B and the second cylinders 4C, 4D are placed on a cylinder installation base 10, which is a part of the hull, and are fixed to the cylinder installation base 10 with bolts and nuts.
- the steering gear main body 11 includes a plurality of hydraulic units 5 that constitute a hydraulic circuit together with the first cylinders 4A, 4B and the second cylinders 4C, 4D.
- the steering gear main body 11 includes four hydraulic units, a first hydraulic unit 5A, a second hydraulic unit 5B, a third hydraulic unit 5C, and a fourth hydraulic unit 5D, and is located above the first cylinders 4A and 4B.
- a first hydraulic unit 5A and a second hydraulic unit 5B are respectively disposed at
- a third hydraulic unit 5C and a fourth hydraulic unit 5D are disposed above the second cylinders 4C and 4D, respectively.
- Each of the first to fourth hydraulic units 5A to 5D includes a tank unit 51, a valve unit 52, and an electric motor 54.
- Tank unit 51 includes a tank that stores hydraulic oil and a hydraulic pump 61 disposed within the tank.
- the electric motor 54 drives a corresponding hydraulic pump 61.
- the tank unit 51 has a substantially rectangular parallelepiped shape.
- the tank unit 51 and the electric motor 54 are attached to corresponding cylinders (one of the first cylinders 4A, 4B or one of the second cylinders 4C, 4D) in a state where they are lined up in the axial direction of the cylinder.
- the tank unit 51 is located near the corresponding ram (first ram 3A or second ram 3B), and the electric motor 54 is located on the opposite side of the ram with the tank unit 51 in between.
- each hydraulic pump 61 is a variable displacement pump, and each of the first to fourth hydraulic units 5A to 5D includes a regulator 53 that changes the displacement of the corresponding hydraulic pump 61. Further, in this embodiment, each hydraulic pump 61 is a double tilting pump, and the discharge direction of the hydraulic pump 61 can be switched by the regulator 53 while the rotation direction remains in one direction. However, the discharge direction of each hydraulic pump 61 may be switched by switching the rotation direction.
- the regulator 53 is a hydraulic device that operates in response to an electrical signal. Incidentally, since the configuration of the regulator 53 is well known, its explanation will be omitted.
- a regulator 53 is attached to one side of the tank unit 51 (in this embodiment, the side facing inward of the steering gear main body 11), and a regulator 53 is attached to the other side of the tank unit 51.
- a valve unit 52 is attached to the side surface (in this embodiment, the side surface facing outside of the steering gear main body 11).
- the hydraulic pump 61 of the second hydraulic unit 5B is connected to the first cylinder 4A by a supply/discharge line 62 and to the first cylinder 4B by a supply/discharge line 63.
- the discharge direction of the hydraulic pump 61 is set to the supply/discharge line 62 side by the regulator 53, the hydraulic oil discharged from the hydraulic pump 61 is supplied to the first cylinder 4A through the supply/discharge line 62, and is also supplied to the first cylinder 4B.
- the hydraulic oil discharged from the hydraulic pump 61 is sucked into the hydraulic pump 61 through the supply/discharge line 63.
- the supply and discharge lines 62 and 63 cross the valve unit 52 of the second hydraulic unit 5B.
- the valve unit 52 includes valves such as relief valves and check valves provided in branch paths branching from the supply/discharge lines 62 and 63.
- the valve unit 52 of the second hydraulic unit 5B is connected to the first cylinder 4A by a hydraulic pipe 1a forming part of a supply/discharge line 62, and is connected to the first cylinder 4A by a hydraulic pipe 1b forming a part of a supply/discharge line 63. It is connected to the first cylinder 4B.
- the hydraulic pump 61 of the first hydraulic unit 5A is connected to the supply/discharge line 62 via a supply/discharge line 64 and to the supply/discharge line 63 via a supply/discharge line 65.
- the discharge direction of the hydraulic pump 61 is set to the supply/discharge line 64 side by the regulator 53, the hydraulic oil discharged from the hydraulic pump 61 is supplied to the first cylinder 4A through the supply/discharge lines 64, 62, and Hydraulic oil discharged from the cylinder 4B is sucked into the hydraulic pump 61 through supply and discharge lines 63 and 65.
- the supply and discharge lines 64 and 65 cross the valve unit 52 of the first hydraulic unit 5A.
- the valve unit 52 includes valves such as relief valves and check valves provided in branch paths branching from the supply/discharge lines 64 and 65.
- the valve unit 52 of the first hydraulic unit 5A is connected to the valve unit 52 of the second hydraulic unit 5B through a hydraulic pipe 1g forming part of the supply/discharge line 64 and a hydraulic pipe 1h forming part of the supply/discharge line 65. has been done.
- the hydraulic pump 61 of the fourth hydraulic unit 5D is connected to the second cylinder 4D by a supply/discharge line 66 and to the second cylinder 4C by a supply/discharge line 67.
- the discharge direction of the hydraulic pump 61 is set to the supply/discharge line 66 side by the regulator 53, the hydraulic oil discharged from the hydraulic pump 61 is supplied to the second cylinder 4D through the supply/discharge line 66, and also to the second cylinder 4C.
- the hydraulic oil discharged from the hydraulic pump 61 is sucked into the hydraulic pump 61 through the supply/discharge line 67.
- the hydraulic oil discharged from the hydraulic pump 61 is supplied to the second cylinder 4C through the supply/discharge line 67, and is also supplied to the second cylinder 4D.
- the hydraulic oil discharged from the hydraulic pump 61 is sucked into the hydraulic pump 61 through the supply/discharge line 66.
- the supply and discharge lines 66 and 67 cross the valve unit 52 of the fourth hydraulic unit 5D.
- the valve unit 52 includes valves such as relief valves and check valves provided in branch paths branching from the supply/discharge lines 66 and 67.
- the valve unit 52 of the fourth hydraulic unit 5D is connected to the second cylinder 4D by a hydraulic pipe 1d forming part of a supply/discharge line 66, and is connected to the second cylinder 4D by a hydraulic pipe 1c forming a part of a supply/discharge line 67. It is connected to the second cylinder 4C.
- the hydraulic pump 61 of the third hydraulic unit 5C is connected to the supply/discharge line 66 via a supply/discharge line 68 and to the supply/discharge line 67 via a supply/discharge line 69.
- the discharge direction of the hydraulic pump 61 is set to the supply/discharge line 68 side by the regulator 53, the hydraulic fluid discharged from the hydraulic pump 61 is supplied to the second cylinder 4D through the supply/discharge lines 68, 66, and Hydraulic oil discharged from the cylinder 4C is sucked into the hydraulic pump 61 through supply and discharge lines 67 and 69.
- the supply and discharge lines 68 and 69 cross the valve unit 52 of the third hydraulic unit 5C.
- the valve unit 52 includes valves such as relief valves and check valves provided in branch paths branching from the supply/discharge lines 68 and 69.
- the valve unit 52 of the third hydraulic unit 5C is connected to the valve unit 52 of the fourth hydraulic unit 5D through a hydraulic pipe 1i forming part of the supply/discharge line 68 and a hydraulic pipe 1j forming part of the supply/discharge line 69. has been done.
- the supply/discharge line 62 and the supply/discharge line 66 are connected by a connection line 72, and the supply/discharge line 63 and the supply/discharge line 67 are connected by a connection line 71.
- a separation valve 73 is provided near the supply/discharge lines 62, 63 of the connection lines 71, 72, and a separation valve 74 is provided near the supply/discharge lines 66, 67 of the connection lines 71, 72.
- the separation valves 73 and 74 are normally located at communication positions where the supply and discharge lines 62 and 66 are communicated with each other through the connection line 72, and the supply and discharge lines 63 and 67 are communicated with each other through the connection line 71.
- the separation valve 74 switches to the blocking position where it blocks the ends of the connection lines 71, 72 on the supply/discharge lines 66, 67 side. Cylinders 4A and 4B are disconnected from the hydraulic circuit.
- the separation valve 73 is switched to the blocking position where it blocks the ends of the connection lines 71, 72 on the supply/discharge lines 62, 63 side. Two cylinders 4C and 4D are disconnected from the hydraulic circuit.
- the separation valve 73 is included in the valve unit 52 of the second hydraulic unit 5B, and the separation valve 74 is included in the valve unit 52 of the fourth hydraulic unit 5D.
- the valve units 52 of the second hydraulic unit 5B and the fourth hydraulic unit 5D are connected to each other by a hydraulic pipe 1e that constitutes a part of the connection line 71 and a hydraulic pipe 1f that constitutes a part of the connection line 72.
- a control device 9A that controls the electric motor 54 and regulator 53 of the first hydraulic unit 5A is attached to the first cylinder 4A, and a control device 9A that controls the electric motor 54 and regulator 53 of the second hydraulic unit 5B is attached to the first cylinder 4A.
- Device 9B is attached.
- a control device 9C that controls the electric motor 54 and regulator 53 of the third hydraulic unit 5C is attached to the second cylinder 4C, and a control device 9C that controls the electric motor 54 and regulator 53 of the fourth hydraulic unit 5D is attached to the second cylinder 4D.
- Device 9D is attached.
- Each of the control devices 9A to 9D is connected to a corresponding electric motor 54 and regulator 53 by electrical wiring.
- a steering angle command is input from the operating device to the control devices 9A to 9D, and the control devices 9A to 9D control the electric motor 54 and the regulator 53 based on the steering angle command.
- controllers 9A-9D the functionality of the elements disclosed herein may include general purpose processors, special purpose processors, integrated circuits, ASICs (Application Specific Integrated Circuits), conventional processors configured or programmed to perform the disclosed functions. and/or combinations thereof.
- Processors are considered processing circuits or circuits because they include transistors and other circuits.
- a circuit, unit, or means is hardware that performs the recited functions or is hardware that is programmed to perform the recited functions.
- the hardware may be the hardware disclosed herein or other known hardware that is programmed or configured to perform the recited functions. If the hardware is a processor, which is considered a type of circuit, the circuit, means or unit is a combination of hardware and software, the software being used in the configuration of the hardware and/or the processor.
- each of the control devices 9A to 9D has the function of a starter for the electric motor 54.
- a starter for each electric motor 54 may be provided independently from the control device 9.
- the starter may be attached to the corresponding cylinder (one of the first cylinders 4A, 4B or one of the second cylinders 4C, 4D), or may be attached to the hull (for example, the cylinder installation base 10). Good too.
- the control device 9A attached to the first cylinder 4A is located on the opposite side of the first ram 3A with respect to the first hydraulic unit 5A. That is, the control device 9A is located behind the electric motor 54 of the first hydraulic unit 5A so as to face the electric motor 54 of the first hydraulic unit 5A along the axial direction of the first cylinder 4A.
- the control device 9B attached to the first cylinder 4B is located on the opposite side of the first ram 3A with respect to the second hydraulic unit 5B. That is, the control device 9B is located behind the electric motor 54 so as to face the electric motor 54 of the second hydraulic unit 5B along the axial direction of the first cylinder 4B.
- the control device 9C attached to the second cylinder 4C is located on the opposite side of the second ram 3B with respect to the third hydraulic unit 5C. That is, the control device 9C is located behind the electric motor 54 so as to face the electric motor 54 of the third hydraulic unit 5C along the axial direction of the second cylinder 4C.
- the control device 9D attached to the second cylinder 4D is located on the opposite side of the second ram 3B with respect to the fourth hydraulic unit 5D. That is, the control device 9D is located behind the electric motor 54 so as to face the electric motor 54 of the fourth hydraulic unit 5D along the axial direction of the second cylinder 4D.
- a control device receiver 41 forming a flat mounting surface is provided on the upper surface of the rear end portion of each of the first cylinders 4A, 4B and the second cylinders 4C, 4D.
- Each of the control devices 9A to 9D (control device 9) is attached to the control device receiver 41 via a bracket 91.
- a motor receiver 42 that forms a flat mounting surface is provided in front of the control device receiver 41.
- An electric motor 54 is attached to this electric motor receiver 42 via a stand 43.
- the stand 43 includes a base plate 44 and a plurality of blocks 45 provided on the base plate 44, as shown in FIG. 9B.
- the hydraulic pipes 1e and 1f connecting the valve units 52 of the second hydraulic unit 5B and the fourth hydraulic unit 5D described above surround the first cylinder 4B and the second cylinder 4D in a plan view. It is U-shaped. That is, among the control devices 9A to 9D, the control devices 9B and 9D are located near the hydraulic pipes 1e and 1f, and the control devices 9B and 9D are arranged inside the hydraulic pipes 1e and 1f. Further, as shown in FIG. 2, the hydraulic pipes 1e and 1f are laid below the control devices 9B and 9D so as to pass through a space facing the back surfaces of the first cylinder 4B and the second cylinder 4D.
- control devices 9B and 9D are arranged inside the hydraulic pipes 1e and 1f laid so as to pass through the space facing the back surfaces of the first cylinder 4B and the second cylinder 4D. , these control devices 9B and 9D occupy a smaller space behind the first cylinder 4B and second cylinder 4D. Therefore, it is possible to prevent the entire steering gear from becoming larger.
- the steering gear main body 11 includes a steering angle transmitter 8C that detects the steering angle, which is the angle of the steering plate fixed to the rudder shaft 15 with respect to the ship's ship direction, and two stroke transmitters that detect the stroke of the second ram 3B. Sensors 8A and 8B are attached.
- the rudder angle transmitter 8C outputs the detected rudder angle to a rudder angle meter provided on the bridge of the hull.
- the rudder angle transmitter 8C includes a rotation sensor 83, a column 85 erected on the cylindrical portion 21 of the rudder handle 2, and a link mechanism 84 that connects the rotation sensor 83 and the column 85 and whose bending angle can be changed.
- the rotation angle of the rotation sensor 83 is converted into a steering angle.
- the stroke sensors 8A and 8B are used as tracking transmitters for feedback control.
- the stroke sensor 8A is connected to the control device 9C through electric wiring
- the stroke sensor 8B is connected to the control device 9D through electric wiring.
- the control device 9C converts the stroke of the second ram 3B detected by the stroke sensor 8A into a steering angle
- the control device 9C converts the stroke of the second ram 3B detected by the stroke sensor 8A into a steering angle.
- only one stroke sensor may be provided and that stroke sensor may be connected to both the control devices 9C and 9D.
- the stroke sensors 8A and 8B are arranged in the vertical direction on the side of the second ram 3B (in the present embodiment, on the outside of the steering gear main body 11).
- a block 33 that protrudes in the opposite direction to the direction toward the rudder shaft 15 is provided at the center of the second ram 3B.
- Each of the stroke sensors 8A, 8B includes a detection element 81 attached to the second ram 3B via the block 33, and a linear detector 82 that emits a signal according to the position of the detection element 81.
- the linear detector 82 extends across the second cylinders 4C and 4D, and both ends of the linear detector 82 are connected to each other through the supports 40 provided in the second cylinders 4C and 4D. and is attached to the second cylinders 4C and 4D.
- each of the control devices 9A to 9D (control device 9) is located on the opposite side of the ram (first ram 3A or second ram 3B) with respect to the corresponding hydraulic unit 5, so that the hydraulic The space on the opposite side of the ram to the unit 5 can be used effectively.
- the hydraulic pipes 1e and 1f pass below the control devices 9B and 9D behind the first cylinder 4B and the second cylinder 4D, so that the hydraulic pipes 1e and 1f pass below the control devices 9B and 9D, so that the Good accessibility to the control devices 9B and 9D can be ensured.
- the stroke sensors 8A and 8B can be used as follow-up transmitters for feedback control. Moreover, since the stroke sensors 8A and 8B can be attached to the steering gear main body 11, there is no need to attach them to the hull like conventional tracking transmitters.
- a vibration isolating material 92 may be interposed between the two.
- the vibration isolating material 92 is, for example, a sheet having cushioning properties. According to this configuration, transmission of vibrations to the control device 9 can be suppressed. Note that the vibration isolating material 92 may be interposed between at least one of the control device receiver 41 and the bracket 91 and between the bracket 91 and the control device 9.
- each of the control devices 9A to 9D may be located on the side of the electric motor 54.
- the control device 9 connects the corresponding cylinder (one of the first cylinders 4A, 4B or the second cylinders 4C, 4D) via the bracket 93 having a horizontally T-shaped cross section, the base plate 44 of the stand 43, and the motor receiver 42, for example. ).
- a vibration isolator 92 may be interposed between at least one of the base plate 44 of the stand 43 and the bracket 93 and between the bracket 93 and the control device 9.
- control devices 9A to 9D do not necessarily need to be attached to the first cylinders 4A, 4B and the second cylinders C, 4D, but may be attached to the tank units 51 or valve units 52 of the first to fourth hydraulic units 5A to 5D. It's okay.
- control devices 9A to 9D may be attached to the hull (for example, the cylinder installation stand 10) near the steering gear main body 11.
- “near the steering gear body 11” refers to an area around the steering gear body 11 surrounded by a line 50 cm away from the outline of the steering gear body 11 in a plan view.
- control device 9 when each of the control devices 9A to 9D (control device 9) is attached to the hull via a bracket, the vibration isolating material 92 is provided between the hull and the bracket and at least one between the bracket and the control device 9. May intervene.
- the number of control devices 9 does not necessarily have to be four, and may be one, two, or three. However, it is desirable that the number of control devices 4 is plural from the viewpoint of fail-safe.
- a first control device in which the control devices 9A and 9B are integrated and a second control device in which the control devices 9C and 9D are integrated is adopted, and the first control device is connected to the first and second hydraulic units 5A,
- the second control device may control the motors 54 and regulators 53 of the third and fourth hydraulic units 5C and 5D.
- the first control device may be attached to one of the first cylinders 4A, 4B, and the second control device may be attached to one of the second cylinders 4C, 4D.
- the number of hydraulic units does not necessarily need to be four, and may be two or three.
- the third hydraulic unit 5C may be omitted in the embodiment.
- the hydraulic device that operates according to the electric signal included in the steering gear main body 11 does not necessarily have to be the regulator 53.
- the hydraulic equipment that operates according to the electric signal is the hydraulic pump included in the valve unit 52 of the first to fourth hydraulic units 5A to 5D. It may be an electromagnetic switching valve that switches the supply destination of the hydraulic oil discharged from 61.
- the hydraulic pump 61 is a fixed displacement pump, the discharge flow rate of the hydraulic pump 61 may be changed depending on the rotation speed of the hydraulic pump 61.
- the number of hydraulic devices that operate according to the electric signals included in the steering gear main body 11 may be one, three, or five or more. Good too.
- a Rapson slide type steering gear body including at least one hydraulic device that operates in response to an electric signal;
- a steering gear is provided, including at least one control device that controls at least one hydraulic device.
- the control device since the control device is attached to the steering gear main body, the electrical wiring between the steering gear main body and the control device can be shortened.
- the at least one hydraulic device includes a plurality of hydraulic devices
- the at least one control device includes a plurality of control devices
- the steering gear body is attached to a rudder shaft.
- a rudder handle to be fixed, at least one ram provided with a pin that engages with the rudder handle, at least two cylinders into which both ends of the at least one ram are inserted, together with the at least two cylinders;
- a plurality of hydraulic units each including a plurality of hydraulic devices, a plurality of hydraulic pumps, and a plurality of electric motors that drive the plurality of hydraulic pumps, which constitute a hydraulic circuit, and the plurality of hydraulic units include the at least one of the plurality of hydraulic units.
- the plurality of control devices may be disposed above the two cylinders, and the plurality of control devices may be attached to the at least two cylinders so as to be located on the opposite side of the ram with respect to the plurality of hydraulic units. According to this configuration, the space on the opposite side of the ram to the hydraulic unit can be effectively utilized.
- the at least one ram includes a first ram and a second ram that are arranged parallel to each other so as to sandwich the rudder shaft
- the at least two cylinders include the including two first cylinders into which both ends of a first ram are inserted, and two second cylinders into which both ends of a second ram are inserted, and below the plurality of control devices, the two Hydraulic piping may be laid so as to pass through a space facing the back surface of two adjacent cylinders of the two first cylinders and the two second cylinders. According to this configuration, good accessibility to the control device can be ensured.
- the plurality of hydraulic pumps include four hydraulic pumps
- the plurality of electric motors include four electric motors
- the plurality of hydraulic units include four hydraulic units.
- the four hydraulic units each include the four hydraulic pumps, the four electric motors, and four valve units
- the hydraulic piping connects two of the four valve units to each other. Good too.
- each of the four hydraulic pumps is a variable displacement pump
- the plurality of hydraulic devices are four regulators that respectively change the displacement of the four hydraulic pumps. May include.
- the plurality of control devices include four control devices that respectively control the four regulators, and the four control devices each control the two first cylinders and the second cylinder.
- Two of the four control devices, which are attached to each of the two second cylinders and located near the hydraulic piping, may be arranged inside the hydraulic piping. According to this configuration, for the control device placed inside the hydraulic piping laid so as to pass through the space facing the rear surfaces of two adjacent cylinders, the space occupied behind those cylinders becomes smaller. This can prevent the entire steering gear from becoming larger.
- the above-mentioned steering gear includes a detection element attached to the at least one ram, which detects a stroke of the at least one ram, and a detection element attached to the at least one ram, and further comprising at least one stroke sensor that extends across at least two cylinders and includes a linear detector that transmits a signal according to the position of the detection element, and at least two of the plurality of control devices
- a stroke of the at least one ram detected by one stroke sensor may be converted into a steering angle.
- the stroke sensor can be used as a tracking transmitter for feedback control.
- the stroke sensor can be attached to the main body of the steering gear, there is no need to attach it to the hull like a conventional follow-up transmitter.
- the present disclosure includes a Rapson slide type steering gear body including at least one hydraulic device that operates in response to an electric signal, and a steering gear body attached to the hull near the steering gear body. and at least one control device that controls the at least one hydraulic device.
- the control device since the control device is attached to the hull near the steering gear body, the electrical wiring between the steering gear body and the control device can be shortened.
- the at least one control device is attached to the steering gear main body or the hull via a bracket, and the at least one control device is attached to the steering gear main body or the hull.
- a vibration damping material may be interposed between at least one of the bracket and the bracket, and between the bracket and the at least one control device. According to this configuration, transmission of vibration to the control device can be suppressed.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Fluid-Pressure Circuits (AREA)
Abstract
舵取機(1)は、電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体(11)と、舵取機本体(11)に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置(9)を含む。例えば、舵取機本体(11)は、舵軸(15)に固定される舵柄(2)と、舵柄(2)と係合するラム(3A,3B)と、ラム(3A,3B)の両端部がそれぞれ挿入されたシリンダ(4A~4D)と、シリンダ(4A~4D)と共に油圧回路を構成する複数の油圧ユニット(5)を含み、シリンダ(4A~4D)に制御装置(9)がそれぞれ取り付けられる。
Description
本開示は、舵取機に関する。
従来から、ラプソンスライド型の舵取機本体を含む舵取機が知られている。例えば、特許文献1には、図10に示すような舵取機100が開示されている。
具体的に、舵取機100は、舵取機本体110および制御装置120を含む。舵取機本体110は、舵軸200に固定される舵柄111と、舵柄111と係合するラム112と、ラム112の両端部がそれぞれ挿入された2つのシリンダ113を含む。さらに、舵取機本体110は、シリンダ113と共に油圧回路を構成する油圧ユニット114を含む。油圧ユニット114は電気信号に応じて作動する油圧機器として電磁切換弁を含み、この電磁切換弁が制御装置120により制御される。制御装置120は操作装置130と接続されている。
しかしながら、図10に示す舵取機100では、制御装置120が舵取機本体110から離れた位置に配置されているので、舵取機本体110と制御装置120との間の電気配線が比較的に長くなる。
そこで、本開示は、舵取機本体と制御装置との間の電気配線を短くすることができる舵取機を提供することを目的とする。
本開示は、一つの側面から、電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、前記舵取機本体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、を備える、舵取機を提供する。
本開示は、別の側面から、電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、前記舵取機本体の近傍で船体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、を備える、舵取機を提供する。
本開示によれば、舵取機本体と制御装置との間の電気配線を短くすることができる舵取機が提供される。
図1~3に、一実施形態に係る舵取機1を示す。この舵取機1は、ラプソンスライド型の舵取機本体11と、舵取機本体11に取り付けられた少なくとも1つの制御装置9を含む。本実施形態では、舵取機本体11に4つの制御装置9A~9Dが取り付けられている。
本実施形態では、舵取機本体11が、舵軸15に固定される舵柄2と、舵柄2を揺動させる2つの油圧アクチュエータを含む。一方の油圧アクチュエータは第1ラム3Aおよび2つの第1シリンダ4A,4Bを含み、他方の油圧アクチュエータは第2ラム3Bおよび2つの第2シリンダ4C,4Dを含む。ただし、舵取機本体11は、油圧アクチュエータを1つだけ含んでもよい。
舵柄2は、内部に舵軸15が挿入される筒状部21と、筒状部21の側面から互いに反対向きに突出する一対のアーム部22を含む。各アーム部22は、対応するラム(第1ラム3Aまたは第2ラム3B)を挟んで上下方向で互いに対向する一対の対向壁23を含み、これらの対向壁23の先端に係合溝24が形成されている。
第1ラム3Aおよび第2ラム3Bは、舵軸15を挟み込むように互いに平行に配置されている。第1ラム3Aおよび第2ラム3Bの中央には上向きおよび下向きに突出するピン31が設けられており、これらのピン31がローラ32を介して舵柄2の係合溝24に係合している。
第1ラム3Aの両端部は第1シリンダ4A,4Bにそれぞれ挿入されており、第2ラム3Bの両端部は第2シリンダ4C,4Dにそれぞれ挿入されている。以下、説明の便宜上、各シリンダについてラムに向かう方向を前方、その反対方向を後方という。
互いに隣り合う第1シリンダ4Aと第2シリンダ4Cの前部同士は連結板13によって連結されており、互いに隣り合う第1シリンダ4Bと第2シリンダ4Dの前部同士は連結板12によって連結されている。第1シリンダ4A,4Bおよび第2シリンダ4C,4Dは、船体の一部であるシリンダ設置台10上に載置されて、シリンダ設置台10にボルトおよびナットにより固定される。
さらに、舵取機本体11は、第1シリンダ4A,4Bおよび第2シリンダ4C,4Dと共に油圧回路を構成する複数の油圧ユニット5を含む。本実施形態では、舵取機本体11が第1油圧ユニット5A、第2油圧ユニット5B、第3油圧ユニット5Cおよび第4油圧ユニット5Dの4つの油圧ユニットを含み、第1シリンダ4A,4Bの上方に第1油圧ユニット5Aおよび第2油圧ユニット5Bがそれぞれ配置され、第2シリンダ4C,4Dの上方に第3油圧ユニット5Cおよび第4油圧ユニット5Dがそれぞれ配置されている。
第1~第4油圧ユニット5A~5Dのそれぞれは、タンクユニット51、バルブユニット52および電動機54を含む。タンクユニット51は、作動油を貯留するタンクと、タンク内に配置された油圧ポンプ61を含む。電動機54は、対応する油圧ポンプ61を駆動する。
タンクユニット51は、略直方体状の形状を有する。タンクユニット51と電動機54は、対応するシリンダ(第1シリンダ4A,4Bの一方または第2シリンダ4C,4Dの一方)に、当該シリンダの軸方向に並んだ状態で取り付けられている。タンクユニット51は対応するラム(第1ラム3Aまたは第2ラム3B)の近くに位置しており、電動機54はタンクユニット51を挟んでラムと反対側に位置している。
本実施形態では、各油圧ポンプ61が可変容量型ポンプであり、第1~第4油圧ユニット5A~5Dのそれぞれが、対応する油圧ポンプ61の容量を変更するレギュレータ53を含む。また、本実施形態では、各油圧ポンプ61が両傾転ポンプであり、回転方向が一方向のままでレギュレータ53によって油圧ポンプ61の吐出方向の切り換えが可能である。ただし、各油圧ポンプ61は、回転方向が切り換えられることで吐出方向が切り換えられてもよい。
レギュレータ53は、電気信号に応じて作動する油圧機器である。なお、レギュレータ53の構成は公知であるのでその説明は省略する。第1~第4油圧ユニット5A~5Dのそれぞれにおいて、タンクユニット51の一方の側面(本実施形態では、舵取機本体11の内側を向く側面)にレギュレータ53が取り付けられ、タンクユニット51の他方の側面(本実施形態では、舵取機本体11の外側を向く側面)にバルブユニット52が取り付けられている。
図3に示すように、第2油圧ユニット5Bの油圧ポンプ61は、給排ライン62により第1シリンダ4Aと接続されているとともに、給排ライン63により第1シリンダ4Bと接続されている。レギュレータ53によって油圧ポンプ61の吐出方向が給排ライン62側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン62を通じて第1シリンダ4Aへ供給されるとともに、第1シリンダ4Bから排出された作動油が給排ライン63を通じて油圧ポンプ61に吸入される。逆に、油圧ポンプ61の吐出方向が給排ライン63側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン63を通じて第1シリンダ4Bへ供給されるとともに、第1シリンダ4Aから排出された作動油が給排ライン62を通じて油圧ポンプ61に吸入される。
給排ライン62,63は、第2油圧ユニット5Bのバルブユニット52を横断している。バルブユニット52は、給排ライン62,63から分岐する分岐路に設けられたリリーフ弁やチェック弁などのバルブを含む。第2油圧ユニット5Bのバルブユニット52は、給排ライン62の一部を構成する油圧配管1aにより第1シリンダ4Aと接続されているとともに、給排ライン63の一部を構成する油圧配管1bにより第1シリンダ4Bと接続されている。
第1油圧ユニット5Aの油圧ポンプ61は、給排ライン64により給排ライン62と接続されているとともに、給排ライン65により給排ライン63と接続されている。レギュレータ53によって油圧ポンプ61の吐出方向が給排ライン64側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン64,62を通じて第1シリンダ4Aへ供給されるとともに、第1シリンダ4Bから排出された作動油が給排ライン63,65を通じて油圧ポンプ61に吸入される。逆に、油圧ポンプ61の吐出方向が給排ライン65側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン65,63を通じて第1シリンダ4Bへ供給されるとともに、第1シリンダ4Aから排出された作動油が給排ライン62,64を通じて油圧ポンプ61に吸入される。
給排ライン64,65は、第1油圧ユニット5Aのバルブユニット52を横断している。バルブユニット52は、給排ライン64,65から分岐する分岐路に設けられたリリーフ弁やチェック弁などのバルブを含む。第1油圧ユニット5Aのバルブユニット52は、給排ライン64の一部を構成する油圧配管1gおよび給排ライン65の一部を構成する油圧配管1hにより第2油圧ユニット5Bのバルブユニット52と接続されている。
第4油圧ユニット5Dの油圧ポンプ61は、給排ライン66により第2シリンダ4Dと接続されているとともに、給排ライン67により第2シリンダ4Cと接続されている。レギュレータ53によって油圧ポンプ61の吐出方向が給排ライン66側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン66を通じて第2シリンダ4Dへ供給されるとともに、第2シリンダ4Cから排出された作動油が給排ライン67を通じて油圧ポンプ61に吸入される。逆に、油圧ポンプ61の吐出方向が給排ライン67側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン67を通じて第2シリンダ4Cへ供給されるとともに、第2シリンダ4Dから排出された作動油が給排ライン66を通じて油圧ポンプ61に吸入される。
給排ライン66,67は、第4油圧ユニット5Dのバルブユニット52を横断している。バルブユニット52は、給排ライン66,67から分岐する分岐路に設けられたリリーフ弁やチェック弁などのバルブを含む。第4油圧ユニット5Dのバルブユニット52は、給排ライン66の一部を構成する油圧配管1dにより第2シリンダ4Dと接続されているとともに、給排ライン67の一部を構成する油圧配管1cにより第2シリンダ4Cと接続されている。
第3油圧ユニット5Cの油圧ポンプ61は、給排ライン68により給排ライン66と接続されているとともに、給排ライン69により給排ライン67と接続されている。レギュレータ53によって油圧ポンプ61の吐出方向が給排ライン68側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン68,66を通じて第2シリンダ4Dへ供給されるとともに、第2シリンダ4Cから排出された作動油が給排ライン67,69を通じて油圧ポンプ61に吸入される。逆に、油圧ポンプ61の吐出方向が給排ライン69側に設定されると、油圧ポンプ61から吐出された作動油が給排ライン69,67を通じて第2シリンダ4Cへ供給されるとともに、第2シリンダ4Dから排出された作動油が給排ライン66,68を通じて油圧ポンプ61に吸入される。
給排ライン68,69は、第3油圧ユニット5Cのバルブユニット52を横断している。バルブユニット52は、給排ライン68,69から分岐する分岐路に設けられたリリーフ弁やチェック弁などのバルブを含む。第3油圧ユニット5Cのバルブユニット52は、給排ライン68の一部を構成する油圧配管1iおよび給排ライン69の一部を構成する油圧配管1jにより第4油圧ユニット5Dのバルブユニット52と接続されている。
さらに、本実施形態では、給排ライン62と給排ライン66とが連結ライン72によって接続されているとともに、給排ライン63と給排ライン67とが連結ライン71によって接続されている。連結ライン71,72の給排ライン62,63の近くには分離弁73が設けられており、連結ライン71,72の給排ライン66,67の近くには分離弁74が設けられている。
分離弁73,74は、通常時は、給排ライン62,66同士を連結ライン72を通じて連通させるとともに、給排ライン63,67同士を連結ライン71を通じて連通させる連通位置に位置する。一方、第1シリンダ4A,4Bの一方または双方に異常が発生したとき、分離弁74が連結ライン71,72における給排ライン66,67側の端部をブロックするブロック位置に切り換えらえて第1シリンダ4A,4Bが液圧回路から切り離される。逆に、第2シリンダ4C,4Dの一方または双方に異常が発生したとき、分離弁73が連結ライン71,72における給排ライン62,63側の端部をブロックするブロック位置に切り換えらえて第2シリンダ4C,4Dが液圧回路から切り離される。
分離弁73は第2油圧ユニット5Bのバルブユニット52に含まれ、分離弁74は第4油圧ユニット5Dのバルブユニット52に含まれる。第2油圧ユニット5Bと第4油圧ユニット5Dのバルブユニット52同士は、連結ライン71の一部を構成する油圧配管1eおよび連結ライン72の一部を構成する油圧配管1fによって接続されている。
第1シリンダ4Aには、第1油圧ユニット5Aの電動機54およびレギュレータ53を制御する制御装置9Aが取り付けられ、第1シリンダ4Bには、第2油圧ユニット5Bの電動機54およびレギュレータ53を制御する制御装置9Bが取り付けられている。第2シリンダ4Cには、第3油圧ユニット5Cの電動機54およびレギュレータ53を制御する制御装置9Cが取り付けられ、第2シリンダ4Dには、第4油圧ユニット5Dの電動機54およびレギュレータ53を制御する制御装置9Dが取り付けられている。制御装置9A~9Dのそれぞれは、電気配線により対応する電動機54およびレギュレータ53と接続されている。制御装置9A~9Dには操作装置から舵角指令が入力され、制御装置9A~9Dは舵角指令に基づいて電動機54およびレギュレータ53を制御する。
制御装置9A~9Dに関し、本明細書で開示する要素の機能は、開示された機能を実行するよう構成またはプログラムされた汎用プロセッサ、専用プロセッサ、集積回路、ASIC(Application Specific Integrated Circuits)、従来の回路、および/または、それらの組み合わせ、を含む回路または処理回路を使用して実行できる。プロセッサは、トランジスタやその他の回路を含むため、処理回路または回路と見なされる。本開示において、回路、ユニット、または手段は、列挙された機能を実行するハードウエアであるか、または、列挙された機能を実行するようにプログラムされたハードウエアである。ハードウエアは、本明細書に開示されているハードウエアであってもよいし、あるいは、列挙された機能を実行するようにプログラムまたは構成されているその他の既知のハードウエアであってもよい。ハードウエアが回路の一種と考えられるプロセッサである場合、回路、手段、またはユニットはハードウエアとソフトウエアの組み合わせであり、ソフトウエアはハードウエアおよび/またはプロセッサの構成に使用される。
本実施形態では、制御装置9A~9Dのそれぞれ(制御装置9)が、電動機54の始動器の機能を持つ。ただし、各電動機54の始動器が制御装置9とは別に独立して設けられもよい。この場合、始動器は、対応するシリンダ(第1シリンダ4A,4Bの一方または第2シリンダ4C,4Dの一方)に取り付けられてもよいし、船体(例えば、シリンダ設置台10)に取り付けられてもよい。
第1シリンダ4Aに取り付けられた制御装置9Aは、第1油圧ユニット5Aに対して第1ラム3Aと反対側に位置している。すなわち、制御装置9Aは、第1シリンダ4Aの軸方向に沿って第1油圧ユニット5Aの電動機54と対向するように、電動機54の後方に位置している。
第1シリンダ4Bに取り付けられた制御装置9Bは、第2油圧ユニット5Bに対して第1ラム3Aと反対側に位置している。すなわち、制御装置9Bは、第1シリンダ4Bの軸方向に沿って第2油圧ユニット5Bの電動機54と対向するように、電動機54の後方に位置している。
第2シリンダ4Cに取り付けられた制御装置9Cは、第3油圧ユニット5Cに対して第2ラム3Bと反対側に位置している。すなわち、制御装置9Cは、第2シリンダ4Cの軸方向に沿って第3油圧ユニット5Cの電動機54と対向するように、電動機54の後方に位置している。
第2シリンダ4Dに取り付けられた制御装置9Dは、第4油圧ユニット5Dに対して第2ラム3Bと反対側に位置している。すなわち、制御装置9Dは、第2シリンダ4Dの軸方向に沿って第4油圧ユニット5Dの電動機54と対向するように、電動機54の後方に位置している。
図7に示すように、第1シリンダ4A,4Bおよび第2シリンダ4C,4Dのそれぞれの後端部の上面には、フラットな載置面を形成する制御装置受け41が設けられている。制御装置9A~9Dのそれぞれ(制御装置9)は、ブラケット91を介して制御装置受け41に取り付けられている。
また、第1シリンダ4A,4Bおよび第2シリンダ4C,4Dのそれぞれの上面には、制御装置受け41よりも前方に、フラットな載置面を形成する電動機受け42が設けられている。この電動機受け42に電動機54が台43を介して取り付けられている。台43は、図9Bに示すように、ベースプレート44と、ベースプレート44上に設けられた複数のブロック45を含む。
図1に戻って、上述した第2油圧ユニット5Bと第4油圧ユニット5Dのバルブユニット52同士を接続する油圧配管1e,1fは、平面視で、第1シリンダ4Bおよび第2シリンダ4Dを取り囲むようなU字状である。つまり、制御装置9A~9Dのうち制御装置9B,9Dが油圧配管1e,1fの近くに位置し、制御装置9B,9Dは油圧配管1e,1fよりも内側に配置されている。また、油圧配管1e,1fは、図2に示すように、制御装置9B,9Dよりも下方で、第1シリンダ4Bと第2シリンダ4Dの背面に面する空間を通るように敷設されている。
このように、本実施形態では、制御装置9B,9Dが第1シリンダ4Bおよび第2シリンダ4Dの背面に面する空間を通るように敷設された油圧配管1e,1fの内側に配置されているので、それらの制御装置9B,9Dについては、第1シリンダ4Bおよび第2シリンダ4Dの後方の占有スペースが小さくなる。従って、舵取機全体の大型化を防ぐことができる。
さらに、舵取機本体11には、舵軸15に固定された舵板の船長方向に対する角度である舵角を検出する舵角発信器8Cと、第2ラム3Bのストロークを検出する2つのストロークセンサ8A,8Bが取り付けられている。舵角発信器8Cは、船体のブリッジに設けられる舵角計に、検出した舵角を出力する。舵角発信器8Cは、回転センサ83と、舵柄2の筒状部21に立設された支柱85と、回転センサ83と支柱85とを連結する、折れ角が変更可能なリンク機構84を含み、回転センサ83の回転角が舵角に換算される。
ストロークセンサ8A,8Bは、フィードバック制御用の追従発信器として使用される。本実施形態では、ストロークセンサ8Aが電気配線により制御装置9Cと接続され、ストロークセンサ8Bが電気配線により制御装置9Dと接続されている。制御装置9Cはストロークセンサ8Aで検出された第2ラム3Bのストロークを舵角に変換し、制御装置9Cはストロークセンサ8Aで検出された第2ラム3Bのストロークを舵角に変換する。ただし、ストロークセンサが1つだけ設けられ、そのストロークセンサが制御装置9C,9Dの双方に接続されてもよい。
本実施形態では、ストロークセンサ8A,8Bが、第2ラム3Bの側方(本実施形態では舵取機本体11の外側)で、上下方向に並んでいる。図4~6に示すように、第2ラム3Bの中央には舵軸15に向かう方向と反対方向に突出するブロック33が設けられている。ストロークセンサ8A,8Bのそれぞれは、そのブロック33を介して第2ラム3Bに取り付けられた検出素子81と、検出素子81の位置に応じた信号を発信するリニア検出器82を含む。図1,2に示すように、リニア検出器82は第2シリンダ4C,4Dに跨って延びており、リニア検出器82の両端部は、第2シリンダ4C,4Dに設けられたサポート40を介して第2シリンダ4C,4Dに取り付けられている。
以上説明したように、本実施形態の舵取機1では、制御装置9A~9Dが舵取機本体11に取り付けられているので、舵取機本体11と制御装置9A~9Dとの間の電気配線を短くすることができる。
しかも、本実施形態では、制御装置9A~9Dのそれぞれ(制御装置9)が、対応する油圧ユニット5に対してラム(第1ラム3Aまたは第2ラム3B)と反対側に位置するので、油圧ユニット5に対してラムと反対側のスペースを有効利用することができる。
また、本実施形態では、第1シリンダ4Bおよび第2シリンダ4Dの後方では、油圧配管1e,1fが制御装置9B,9Dの下方を通るため、第1シリンダ4Bおよび第2シリンダ4Dの後方からの制御装置9B,9Dへの良好なアクセス性を確保することができる。
さらに、本実施形態では、ストロークセンサ8A,8Bをフィードバック制御用の追従発信器として使用することができる。しかも、ストロークセンサ8A,8Bは舵取機本体11に取り付け可能であるので、従来の追従発信器のように船体に取り付ける必要がない。
(変形例)
本開示は上述した実施形態に限定されるものではなく、本開示の要旨を逸脱しない範囲で種々の変形が可能である。
本開示は上述した実施形態に限定されるものではなく、本開示の要旨を逸脱しない範囲で種々の変形が可能である。
例えば、図8に示すように、第1シリンダ4A,4Bおよび第2シリンダ4C,4Dのそれぞれに設けられた制御装置受け41とブラケット91との間、およびブラケット91と制御装置9(制御装置9A~9Dのそれぞれ)との間の双方に防振材92が介在してもよい。防振材92は、例えばクッション性を有するシートである。この構成によれば、制御装置9への振動の伝達を抑制することができる。なお、防振材92は、制御装置受け41とブラケット91との間と、ブラケット91と制御装置9との間の少なくとも一方に介在すればよい。
また、図9A,9Bに示すように、制御装置9A~9Dのそれぞれ(制御装置9)は、電動機54の側方に位置してもよい。この場合、制御装置9は、例えば、断面横向きT字状のブラケット93、台43のベースプレート44および電動機受け42を介して対応するシリンダ(第1シリンダ4A,4Bの一方または第2シリンダ4C,4Dの一方)に取り付けられてもよい。このようなブラケット93を用いる場合、台43のベースプレート44とブラケット93との間と、ブラケット93と制御装置9との間の少なくとも一方に防振材92が介在してもよい。
さらに、制御装置9A~9Dは必ずしも第1シリンダ4A,4Bおよび第2シリンダC,4Dに取り付けられる必要はなく、第1~第4油圧ユニット5A~5Dのタンクユニット51またはバルブユニット52に取り付けられてもよい。
あるいは、制御装置9A~9Dは、舵取機本体11の近傍で船体(例えば、シリンダ設置台10)に取り付けられてもよい。ここで、「舵取機本体11の近傍」とは、平面視において、舵取機本体11の周囲の、舵取機本体11の輪郭から50cm離れた線で囲まれる領域をいう。この構成でも、前記実施形態と同様に、舵取機本体11と制御装置9A~9Dとの間の電気配線を短くすることができる。
例えば、制御装置9A~9Dのそれぞれ(制御装置9)がブラケットを介して船体に取り付けられる場合、船体とブラケットとの間と、ブラケットと制御装置9との間の少なくとも一方に防振材92が介在してもよい。
また、制御装置9の数は、必ずしも4つである必要はなく、1つまたは2つまたは3つであってもよい。ただし、制御装置4の数はフェールセーフの観点から複数であることが望ましい。例えば、制御装置9A,9Bが一体となった第1制御装置と、制御装置9C,9Dが一体となった第2制御装置が採用され、第1制御装置が第1および第2油圧ユニット5A,5Bの電動機54およびレギュレータ53を制御し、第2制御装置が第3および第4油圧ユニット5C,5Dの電動機54およびレギュレータ53を制御してもよい。この場合、第1制御装置が第1シリンダ4A,4Bの一方に取り付けられ、第2制御装置が第2シリンダ4C,4Dの一方に取り付けられてもよい。
また、油圧ユニットの数は必ずしも4つである必要はなく、2つまたは3つであってもよい。例えば、前記実施形態において第3油圧ユニット5Cが省略されてもよい。
舵取機本体11に含まれる電気信号に応じて作動する油圧機器は、必ずしもレギュレータ53である必要はない。例えば、油圧ポンプ61が一方向に回転する固定容量型ポンプである場合、電気信号に応じて作動する油圧機器は、第1~第4油圧ユニット5A~5Dのバルブユニット52に含まれる、油圧ポンプ61から吐出される作動油の供給先を切り換える電磁切換弁であってもよい。油圧ポンプ61が固定容量型ポンプである場合、油圧ポンプ61の吐出流量は油圧ポンプ61の回転数によって変更されてもよい。
また、舵取機本体11の構成によっては、舵取機本体11に含まれる電気信号に応じて作動する油圧機器の数は1つであってもよいし、3つまたは5つ以上であってもよい。
(まとめ)
第1の態様として、本開示は、一つの側面から、電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、前記舵取機本体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、を備える、舵取機を提供する。
第1の態様として、本開示は、一つの側面から、電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、前記舵取機本体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、を備える、舵取機を提供する。
上記の構成によれば、制御装置が舵取機本体に取り付けられているので、舵取機本体と制御装置との間の電気配線を短くすることができる。
第2の態様として、第1の態様において、前記少なくとも1つの油圧機器は複数の油圧機器を含み、前記少なくとも1つの制御装置は複数の制御装置を含み、前記舵取機本体は、舵軸に固定される舵柄と、前記舵柄と係合するピンが設けられた少なくとも1つのラムと、前記少なくとも1つのラムの両端部がそれぞれ挿入された少なくとも2つのシリンダと、前記少なくとも2つのシリンダと共に油圧回路を構成する、前記複数の油圧機器、複数の油圧ポンプ、および前記複数の油圧ポンプを駆動する複数の電動機をそれぞれ有する複数の油圧ユニットと、を含み、前記複数の油圧ユニットは、前記少なくとも2つのシリンダの上方に配置されており、前記複数の制御装置は、前記複数の油圧ユニットに対して前記ラムと反対側に位置するように、前記少なくとも2つのシリンダに取り付けられてもよい。この構成によれば、油圧ユニットに対してラムと反対側のスペースを有効利用することができる。
第3の態様として、第2の態様において、前記少なくとも1つのラムは、前記舵軸を挟み込むように互いに平行に配置された第1ラムおよび第2ラムを含み、前記少なくとも2つのシリンダは、前記第1ラムの両端部がそれぞれ挿入された2つの第1シリンダと、前記第2ラムの両端部がそれぞれ挿入された2つの第2シリンダを含み、前記複数の制御装置よりも下方では、前記2つの第1シリンダと前記2つの第2シリンダのうちの互いに隣り合う2つのシリンダの背面に面する空間を通るように油圧配管が敷設されてもよい。この構成によれば、制御装置への良好なアクセス性を確保することができる。
第4の態様として、第3の態様において、例えば、前記複数の油圧ポンプは4つの油圧ポンプを含み、前記複数の電動機は4つの電動機を含み、前記複数の油圧ユニットは4つの油圧ユニットを含み、前記4つの油圧ユニットは、前記4つの油圧ポンプ、前記4つの電動機および4つのバルブユニットをそれぞれ有し、前記油圧配管は、前記4つのバルブユニットのうちの2つのバルブユニット同士を接続してもよい。
第5の態様として、第4の態様において、例えば、前記4つの油圧ポンプのそれぞれは可変容量型ポンプであり、前記複数の油圧機器は、前記4つの油圧ポンプの容量をそれぞれ変更する4つのレギュレータを含んでもよい。
第6の態様として、第5の態様において、前記複数の制御装置は、前記4つのレギュレータをそれぞれ制御する4つの制御装置を含み、前記4つの制御装置は、前記2つの第1シリンダおよび前記2つの第2シリンダにそれぞれ取り付けられ、前記4つの制御装置のうちの前記油圧配管の近くに位置する2つの制御装置は、前記油圧配管よりも内側に配置されてもよい。この構成によれば、隣り合う2つのシリンダの背面に面する空間を通るように敷設された油圧配管の内側に配置された制御装置については、それらのシリンダの後方の占有スペースが小さくなるため、舵取機全体の大型化を防ぐことができる。
第7の態様として、第2~第6の態様の何れかにおいて、上記の舵取機は、前記少なくとも1つのラムのストロークを検出する、前記少なくとも1つのラムに取り付けられた検出素子、および前記少なくとも2つのシリンダに跨って延びる、前記検出素子の位置に応じた信号を発信するリニア検出器を含む少なくとも1つのストロークセンサをさらに備え、前記複数の制御装置のうちの少なくとも2つは、前記少なくとも1つのストロークセンサで検出された前記少なくとも1つのラムのストロークを舵角に変換してもよい。この構成によれば、ストロークセンサをフィードバック制御用の追従発信器として使用することができる。しかも、ストロークセンサは舵取機本体に取り付け可能であるので、従来の追従発信器のように船体に取り付ける必要がない。
第8の態様として、本開示は、別の側面から、電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、前記舵取機本体の近傍で船体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、を備える、舵取機を提供する。
上記の構成によれば、制御装置が舵取機本体の近傍で船体に取り付けられているので、舵取機本体と制御装置との間の電気配線を短くすることができる。
第9の態様として、第1~第8の態様の何れかにおいて、前記少なくとも1つの制御装置は、ブラケットを介して前記舵取機本体または前記船体に取り付けられ、前記舵取機本体または前記船体と前記ブラケットとの間と、前記ブラケットと前記少なくとも1つの制御装置との間の少なくとも一方には、防振材が介在してもよい。この構成によれば、制御装置への振動の伝達を抑制することができる。
Claims (9)
- 電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、
前記舵取機本体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、
を備える、舵取機。 - 前記少なくとも1つの油圧機器は複数の油圧機器を含み、
前記少なくとも1つの制御装置は複数の制御装置を含み、
前記舵取機本体は、
舵軸に固定される舵柄と、
前記舵柄と係合するピンが設けられた少なくとも1つのラムと、
前記少なくとも1つのラムの両端部がそれぞれ挿入された少なくとも2つのシリンダと、
前記少なくとも2つのシリンダと共に油圧回路を構成する、前記複数の油圧機器、複数の油圧ポンプ、および前記複数の油圧ポンプを駆動する複数の電動機をそれぞれ有する複数の油圧ユニットと、を含み、
前記複数の油圧ユニットは、前記少なくとも2つのシリンダの上方に配置されており、
前記複数の制御装置は、前記複数の油圧ユニットに対して前記ラムと反対側に位置するように、前記少なくとも2つのシリンダに取り付けられている、請求項1に記載の舵取機。 - 前記少なくとも1つのラムは、前記舵軸を挟み込むように互いに平行に配置された第1ラムおよび第2ラムを含み、
前記少なくとも2つのシリンダは、前記第1ラムの両端部がそれぞれ挿入された2つの第1シリンダと、前記第2ラムの両端部がそれぞれ挿入された2つの第2シリンダを含み、
前記複数の制御装置よりも下方では、前記2つの第1シリンダと前記2つの第2シリンダのうちの互いに隣り合う2つのシリンダの背面に面する空間を通るように油圧配管が敷設されている、請求項2に記載の舵取機。 - 前記複数の油圧ポンプは4つの油圧ポンプを含み、
前記複数の電動機は4つの電動機を含み、
前記複数の油圧ユニットは4つの油圧ユニットを含み、
前記4つの油圧ユニットは、前記4つの油圧ポンプ、前記4つの電動機および4つのバルブユニットをそれぞれ有し、
前記油圧配管は、前記4つのバルブユニットのうちの2つのバルブユニット同士を接続する、請求項3に記載の舵取機。 - 前記4つの油圧ポンプのそれぞれは可変容量型ポンプであり、
前記複数の油圧機器は、前記4つの油圧ポンプの容量をそれぞれ変更する4つのレギュレータを含む、請求項4に記載の舵取機。 - 前記複数の制御装置は、前記4つのレギュレータをそれぞれ制御する4つの制御装置を含み、
前記4つの制御装置は、前記2つの第1シリンダおよび前記2つの第2シリンダにそれぞれ取り付けられ、
前記4つの制御装置のうちの前記油圧配管の近くに位置する2つの制御装置は、前記油圧配管よりも内側に配置されている、請求項5に記載の舵取機。 - 前記少なくとも1つのラムのストロークを検出する、前記少なくとも1つのラムに取り付けられた検出素子、および前記少なくとも2つのシリンダに跨って延びる、前記検出素子の位置に応じた信号を発信するリニア検出器を含む少なくとも1つのストロークセンサをさらに備え、
前記複数の制御装置のうちの少なくとも2つは、前記少なくとも1つのストロークセンサで検出された前記少なくとも1つのラムのストロークを舵角に変換する、請求項2~6の何れか一項に記載の舵取機。 - 電気信号に応じて作動する少なくとも1つの油圧機器を含むラプソンスライド型の舵取機本体と、
前記舵取機本体の近傍で船体に取り付けられた、前記少なくとも1つの油圧機器を制御する少なくとも1つの制御装置と、
を備える、舵取機。 - 前記少なくとも1つの制御装置は、ブラケットを介して前記舵取機本体または前記船体に取り付けられ、
前記舵取機本体または前記船体と前記ブラケットとの間と、前記ブラケットと前記少なくとも1つの制御装置との間の少なくとも一方には、防振材が介在する、請求項1または8に記載の舵取機。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-137481 | 2022-08-31 | ||
| JP2022137481A JP2024033716A (ja) | 2022-08-31 | 2022-08-31 | 舵取機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024047987A1 true WO2024047987A1 (ja) | 2024-03-07 |
Family
ID=90099310
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/020766 WO2024047987A1 (ja) | 2022-08-31 | 2023-06-05 | 舵取機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2024033716A (ja) |
| WO (1) | WO2024047987A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58161696A (ja) * | 1982-03-19 | 1983-09-26 | Hitachi Zosen Corp | 油圧式舵取り装置 |
| JPH0254903U (ja) * | 1988-10-14 | 1990-04-20 | ||
| JPH04231278A (ja) * | 1990-12-27 | 1992-08-20 | Yanmar Diesel Engine Co Ltd | 小型水上乗物 |
| JP2019039503A (ja) * | 2017-08-25 | 2019-03-14 | 川崎重工業株式会社 | 液圧駆動ユニット |
| CN214698618U (zh) * | 2020-12-31 | 2021-11-12 | 无锡市东舟船舶设备股份有限公司 | 一种集成式泵控闭式拨叉电动液压舵机 |
-
2022
- 2022-08-31 JP JP2022137481A patent/JP2024033716A/ja active Pending
-
2023
- 2023-06-05 WO PCT/JP2023/020766 patent/WO2024047987A1/ja unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58161696A (ja) * | 1982-03-19 | 1983-09-26 | Hitachi Zosen Corp | 油圧式舵取り装置 |
| JPH0254903U (ja) * | 1988-10-14 | 1990-04-20 | ||
| JPH04231278A (ja) * | 1990-12-27 | 1992-08-20 | Yanmar Diesel Engine Co Ltd | 小型水上乗物 |
| JP2019039503A (ja) * | 2017-08-25 | 2019-03-14 | 川崎重工業株式会社 | 液圧駆動ユニット |
| CN214698618U (zh) * | 2020-12-31 | 2021-11-12 | 无锡市东舟船舶设备股份有限公司 | 一种集成式泵控闭式拨叉电动液压舵机 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024033716A (ja) | 2024-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10669131B2 (en) | Construction machine equipped with boom | |
| GB2333272A (en) | Steering system | |
| US20060218909A1 (en) | Electro-hydraulic steering control system | |
| US8562307B2 (en) | Pump equipment | |
| WO2024047987A1 (ja) | 舵取機 | |
| CN101687464A (zh) | 液压驱动车辆 | |
| JP5778058B2 (ja) | 建設機械の制御装置及びその制御方法 | |
| JPH0719207A (ja) | 油圧機械の駆動制御装置 | |
| US7677035B2 (en) | Control system for a hydraulic servomotor | |
| KR101737633B1 (ko) | 건설기계의 비상 조향 장치 | |
| KR101429041B1 (ko) | 전동 액츄에이터의 제어 장치 | |
| WO2020162353A1 (ja) | 油圧駆動システム | |
| US11913195B2 (en) | Hydraulic machine | |
| US6131687A (en) | Process for actuating the steering cylinders of mobile plant and steering system therefor | |
| JP6940992B2 (ja) | 油圧駆動装置、及びそれを備える油圧駆動システム。 | |
| CN214698618U (zh) | 一种集成式泵控闭式拨叉电动液压舵机 | |
| US6684905B2 (en) | Construction machine | |
| US7959479B2 (en) | Boat propulsion system and boat including the same and boat control device and boat control method | |
| JP3475324B2 (ja) | 建設機械の操縦装置 | |
| KR101813385B1 (ko) | 유압을 이용한 차량 조향장치 | |
| JP2017036689A (ja) | 油圧駆動システム | |
| WO2019138921A1 (ja) | 作業車両 | |
| WO2020262700A1 (ja) | モジュールロボット | |
| US6070513A (en) | Load transfer device for tandem mounted actuators | |
| JP2950142B2 (ja) | 建設機械のポンプ制御装置の異常検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23859757 Country of ref document: EP Kind code of ref document: A1 |