WO2023238957A1 - カートリッジ、画像形成装置 - Google Patents
カートリッジ、画像形成装置 Download PDFInfo
- Publication number
- WO2023238957A1 WO2023238957A1 PCT/JP2023/021639 JP2023021639W WO2023238957A1 WO 2023238957 A1 WO2023238957 A1 WO 2023238957A1 JP 2023021639 W JP2023021639 W JP 2023021639W WO 2023238957 A1 WO2023238957 A1 WO 2023238957A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- separation
- developing
- process cartridge
- moving member
- Prior art date
Links
- 238000000926 separation method Methods 0.000 claims description 1324
- 238000003825 pressing Methods 0.000 claims description 276
- 238000011161 development Methods 0.000 claims description 242
- 230000001105 regulatory effect Effects 0.000 claims description 237
- 230000033001 locomotion Effects 0.000 claims description 130
- 108091008695 photoreceptors Proteins 0.000 claims description 49
- 238000013459 approach Methods 0.000 claims description 17
- 230000005489 elastic deformation Effects 0.000 claims description 7
- 238000000034 method Methods 0.000 description 881
- 230000008569 process Effects 0.000 description 858
- 125000006850 spacer group Chemical group 0.000 description 705
- 230000007246 mechanism Effects 0.000 description 376
- 230000008878 coupling Effects 0.000 description 232
- 238000010168 coupling process Methods 0.000 description 232
- 238000005859 coupling reaction Methods 0.000 description 232
- 238000010586 diagram Methods 0.000 description 166
- 238000012546 transfer Methods 0.000 description 80
- 230000006835 compression Effects 0.000 description 76
- 238000007906 compression Methods 0.000 description 76
- 238000005192 partition Methods 0.000 description 59
- 238000003860 storage Methods 0.000 description 39
- 230000000694 effects Effects 0.000 description 38
- 239000002184 metal Substances 0.000 description 38
- 229910052751 metal Inorganic materials 0.000 description 38
- 230000033228 biological regulation Effects 0.000 description 37
- 230000002829 reductive effect Effects 0.000 description 33
- 230000006870 function Effects 0.000 description 32
- 230000005540 biological transmission Effects 0.000 description 31
- 230000036961 partial effect Effects 0.000 description 27
- 230000036544 posture Effects 0.000 description 26
- 238000011144 upstream manufacturing Methods 0.000 description 21
- 230000009471 action Effects 0.000 description 19
- 238000006243 chemical reaction Methods 0.000 description 18
- 230000007704 transition Effects 0.000 description 18
- 230000015572 biosynthetic process Effects 0.000 description 17
- 238000003780 insertion Methods 0.000 description 17
- 230000037431 insertion Effects 0.000 description 17
- 238000007639 printing Methods 0.000 description 15
- 230000002093 peripheral effect Effects 0.000 description 14
- 238000004140 cleaning Methods 0.000 description 13
- 238000003756 stirring Methods 0.000 description 13
- 210000000078 claw Anatomy 0.000 description 11
- 101100507312 Invertebrate iridescent virus 6 EF1 gene Proteins 0.000 description 10
- 239000000463 material Substances 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 238000009434 installation Methods 0.000 description 9
- 239000002699 waste material Substances 0.000 description 9
- 239000000853 adhesive Substances 0.000 description 8
- 230000001070 adhesive effect Effects 0.000 description 8
- 238000013019 agitation Methods 0.000 description 8
- 230000009467 reduction Effects 0.000 description 8
- 230000004044 response Effects 0.000 description 8
- 230000005484 gravity Effects 0.000 description 6
- 230000002265 prevention Effects 0.000 description 6
- 239000011347 resin Substances 0.000 description 6
- 229920005989 resin Polymers 0.000 description 6
- 238000003466 welding Methods 0.000 description 6
- 239000003086 colorant Substances 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000000605 extraction Methods 0.000 description 4
- 230000007935 neutral effect Effects 0.000 description 4
- 230000002441 reversible effect Effects 0.000 description 4
- 230000006399 behavior Effects 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 230000014759 maintenance of location Effects 0.000 description 3
- 239000007769 metal material Substances 0.000 description 3
- 230000000717 retained effect Effects 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 238000011112 process operation Methods 0.000 description 2
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000003472 neutralizing effect Effects 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000010977 unit operation Methods 0.000 description 1
Images





























































































































































































































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/06—Apparatus for electrographic processes using a charge pattern for developing
- G03G15/08—Apparatus for electrographic processes using a charge pattern for developing using a solid developer, e.g. powder developer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
Definitions
- the present disclosure relates to a cartridge that can be attached to or removed from an image forming apparatus such as a copying machine or a printer that employs an electrophotographic method, and an image forming apparatus equipped with the cartridge.
- an electrophotographic image forming apparatus forms an image on a sheet-like recording medium such as paper using an electrophotographic image forming method.
- image forming apparatuses include copying machines, facsimile machines, printers (laser beam printers, LED printers, etc.), and combinations thereof (multifunction printers).
- Image forming apparatuses that use an electrophotographic image forming method include image forming apparatuses that use a contact developing method to form images by performing a developing process with a developing member (developing roller) in contact with a photosensitive drum. be.
- the developing roller is urged toward the photosensitive drum with a predetermined pressure and is in contact with the surface of the photosensitive drum with a predetermined pressure during a period when the developing process is performed.
- the following may be considered, for example.
- the elastic layer is left in contact with the surface of the photosensitive drum and no image formation is performed (the developing roller is not rotating) for a long period of time, the elastic layer of the developing roller will be damaged by contact with the surface of the photosensitive drum. It may become deformed. As a result, image defects such as unintended unevenness in developer images may occur during the development process.
- the developing roller if the developing roller is in contact with the photosensitive drum during a period when the developing process is not performed, the developer carried on the developing roller will unnecessarily adhere to the photosensitive drum, and the developer will be transferred to the recording medium. Adhesion may stain the recording medium. This can occur regardless of the presence or absence of an elastic layer on the surface of the developing roller.
- the sliding friction between the photosensitive drum and the developing roller may cause the photosensitive drum to Deterioration of the developing roller or developer may be accelerated. This can occur regardless of the presence or absence of an elastic layer on the surface of the developing roller.
- the cartridge includes a first unit including a photoconductor, a first frame rotatably supporting the photoconductor, and a first unit that attaches toner to the photoconductor. and a second frame rotatably supporting the developing member, and by moving with respect to the first unit, it is possible to attach toner from the developing member to the photoreceptor.
- a second unit movable between a developing position and a separate position where at least a portion of the developing member is disposed away from the photoreceptor; and a second unit movably supported by the first unit or the second unit.
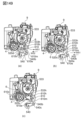
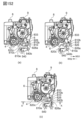
- FIG. 2 is a cross-sectional view of the image forming apparatus.
- FIG. 5 is a cross-sectional view of the image forming apparatus.
- FIG. 8 is a perspective view of a memory element pressing unit and a cartridge pressing unit.
- FIG. 9 is a perspective view of the image forming apparatus.
- FIG. 10 is a side view (partial sectional view) of the process cartridge.
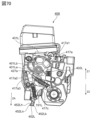
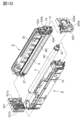
- FIG. 13 is an exploded perspective view of the process cartridge.
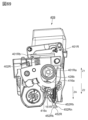
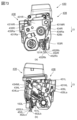
- FIG. 14 is a perspective view of the process cartridge.
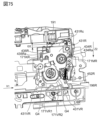
- FIG. 15 is an exploded perspective view of the process cartridge.
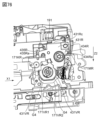
- FIG. 16 is an exploded perspective view of the process cartridge.
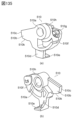
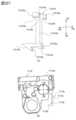
- FIG. 17 is a diagram showing a spacer.
- FIG. 18 is a diagram showing a moving member.
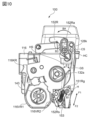
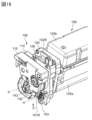
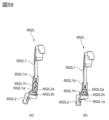
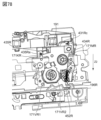
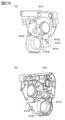
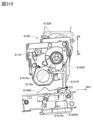
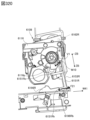
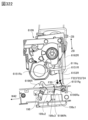
- FIG. 19 is a perspective view of the process cartridge.
- FIG. 20 is a partially enlarged side view of the process cartridge.
- FIG. 21 is a partially enlarged side view of the process cartridge.
- FIG. 22 is a bottom view of the drive side of the process cartridge.
- FIG. 23 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 24 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 25 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 26 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 27 is a side view of the process cartridge inside the image forming apparatus main body.
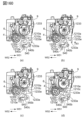
- FIG. 28 is a diagram showing a spacer.
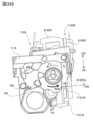
- FIG. 31 is a side view (partial sectional view) of the process cartridge.
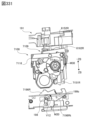
- FIG. 32 is a partially enlarged side view of the process cartridge.
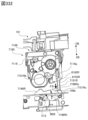
- FIG. 33 is a partially enlarged side view of the process cartridge.
- FIG. 35 is a side view (partial sectional view) of the process cartridge inside the image forming apparatus main body.
- FIG. 36 is a side view (partially sectional view) of the process cartridge inside the image forming apparatus main body.
- FIG. 37 is a side view (partially sectional view) of the process cartridge inside the image forming apparatus main body.
- FIG. 38 is a side view (partially sectional view) of the process cartridge inside the image forming apparatus main body.
- FIG. 39 is a side view (partially sectional view) of the process cartridge inside the image forming apparatus main body.
- FIG. 40 is a partially enlarged side view of the process cartridge.
- FIG. 41 is a partially enlarged side view of the process cartridge.
- FIG. 42 is a perspective view of the process cartridge and a schematic diagram showing the distance of the developing roller from the photosensitive drum.
- FIG. 43 is a perspective view of the process cartridge and a schematic diagram showing the distance of the developing roller from the photosensitive drum.
- FIG. 44 is a perspective view of the process cartridge and a schematic diagram showing the amount of separation of the developing roller from the photosensitive drum.
- FIG. 46 is a perspective view of the process cartridge and a schematic diagram showing the amount of separation of the developing roller from the photosensitive drum.
- FIG. 48 is a diagram showing the relationship between the moving member, the spacer, and the non-drive side bearing.
- FIG. 49 is a side view of the process cartridge inside the image forming apparatus main body and a diagram showing the relationship between the moving member and the spacer.
- FIG. 53 is a side view of the process cartridge inside the image forming apparatus main body and a diagram showing the relationship between the moving member and the spacer.
- FIG. 56 is a partially enlarged side view of the process cartridge.
- FIG. 58 is a diagram showing a moving member.
- FIG. 59 is a diagram showing a moving member.
- FIG. 60 is a diagram showing the operation of the moving member.
- FIG. 61 is a diagram showing the operation of the moving member.
- FIG. 63 is a diagram showing the operation of the moving member.
- FIG. 64 is a diagram showing the operation of the moving member.
- FIG. 68 is an exploded perspective view of the process cartridge.
- FIG. 69 is a side view of the process cartridge.
- FIG. 71 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 73 is a side view of the process cartridge.
- FIG. 74 is a diagram showing how the process cartridge is attached to the tray.
- FIG. 75 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 77 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 79 is a side view of the process cartridge.
- FIG. 80 is an exploded perspective view of the process cartridge.
- FIG. 82 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 83 is a side view of the process cartridge inside the image forming apparatus main body.
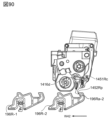
- FIG. 90 is a side view of the process cartridge inside the image forming apparatus main body.
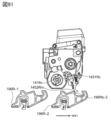
- FIG. 91 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 93 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 94 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 97 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 98 is a side view of the process cartridge inside the image forming apparatus main body.
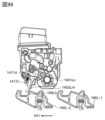
- FIG. 99 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 100 is a side view of the process cartridge inside the image forming apparatus main body.
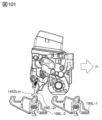
- FIG. 101 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 102 is an exploded perspective view of the process cartridge.
- FIG. 103 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 104 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 105 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 106 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 107 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 108 is an exploded perspective view of the development drive input gear unit.
- FIG. 109 is a cross-sectional view of the development drive input gear unit.
- FIG. 110 is a cross-sectional view of the development drive input gear unit.
- FIG. 111 is a cross-sectional view of the process cartridge.
- FIG. 114 is a side view of the process cartridge as seen along the lateral direction.
- FIG. 116 is an exploded perspective view of the process cartridge.
- FIG. 119 is a diagram showing the developing cover member and the separation and contact mechanism.
- FIG. 120 is a side view of the process cartridge inside the image forming apparatus main body and a side view viewed along the width direction.
- FIG. 121 is a side view of the process cartridge inside the image forming apparatus main body and a side view viewed along the width direction.
- FIG. 123 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 127 is a side view of the process cartridge inside the image forming apparatus main body as seen along the lateral direction.
- FIG. 128 is a side view of the process cartridge inside the image forming apparatus main body as seen along the lateral direction.
- FIG. 129 is a cross-sectional view of the process cartridge.
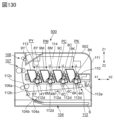
- FIG. 130 is a schematic cross-sectional view of the image forming apparatus.
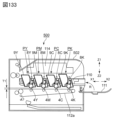
- FIG. 133 is a schematic cross-sectional view of the image forming apparatus.
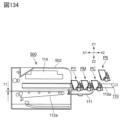
- FIG. 134 is a schematic cross-sectional view of the image forming apparatus.
- FIG. 135 is a diagram showing a spacer.
- FIG. 137 is a perspective view of the process cartridge.
- FIG. 138 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 140 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 141 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
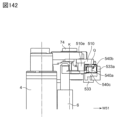
- FIG. 142 is a diagram showing the arrangement of the separation control members.
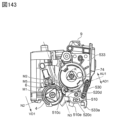
- FIG. 143 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
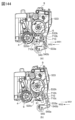
- FIG. 144 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
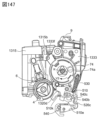
- FIG. 147 is a cross-sectional view of the process cartridge.
- FIG. 148 is a cross-sectional view of the process cartridge.
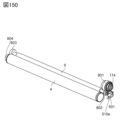
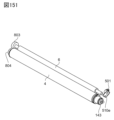
- FIG. 150 is a diagram showing the driving relationship between the photosensitive drum and the developing roller.
- FIG. 151 is a diagram showing the driving relationship between the photosensitive drum and the developing roller.
- FIG. 152 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
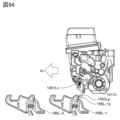
- FIG. 154 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 155 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 156 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
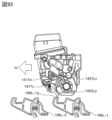
- FIG. 157 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 158 is a perspective view showing the drive-side cartridge cover member and spacer.
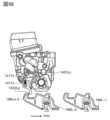
- FIG. 159 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 160 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 161 is a diagram showing the relationship between the moving member and the spacer.
- FIG. 162 is a cross-sectional view of the process cartridge.
- FIG. 163 is a diagram showing the relationship between the moving member and the spacer.
- FIG. 164 is a cross-sectional view of the process cartridge.
- FIG. 165 is a side view of the process cartridge.
- FIG. 167 is an exploded perspective view of the process cartridge.
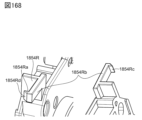
- FIG. 168 is a perspective view of the development side engaging portion.
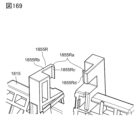
- FIG. 169 is a perspective view of the drum side engagement part.
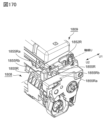
- FIG. 170 is a perspective view of the process cartridge.
- FIG. 171 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 172 is a partial top view of the process cartridge.
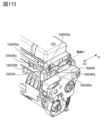
- FIG. 173 is a perspective view of the process cartridge.
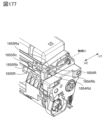
- FIG. 175 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 178 is a side view of the process cartridge inside the image forming apparatus main body.
- FIG. 179 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 180 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
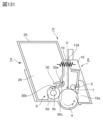
- FIG. 181 is a perspective view of the drive side cartridge cover.
- FIG. 182 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 183 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 184 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
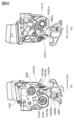
- FIG. 185 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
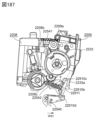
- FIG. 187 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 188 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
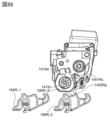
- FIG. 189 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 190 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 191 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 194 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 200 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
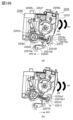
- FIG. 202 is a diagram showing the operation of the holding member.
- FIG. 203 is a diagram showing the operation of the holding member.
- FIG. 204 is a partial perspective view of the process cartridge and tray.
- FIG. 207 is a cross-sectional view of the process cartridge.
- FIG. 208 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
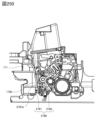
- FIG. 209 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 210 is a diagram showing the relationship between the force receiving portion of the process cartridge and the separation control member.
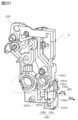
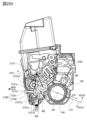
- FIG. 211 is a cross-sectional view of the process cartridge inside the image forming apparatus main body.
- FIG. 212 is a diagram showing the relationship between the force receiving portion of the process cartridge and the separation control member.
- FIG. 213 is a diagram showing the relationship between the force receiving part of the process cartridge and the separation control member.
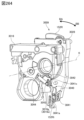
- FIG. 214 is a diagram showing the relationship between the force receiving part of the process cartridge and the separation control member.
- FIG. 216 is a perspective view of the tray.
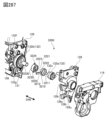
- FIG. 217 is an exploded perspective view of the process cartridge.
- FIG. 218 is an exploded perspective view of the process cartridge.
- FIG. 220 is a perspective view of the process cartridge.
- FIG. 224 is a perspective view of the tray with the developer cartridge installed.
- FIG. 225 is a side view of the tray and developer cartridge inside the image forming apparatus main body.
- FIG. 227 is a side view of the developer cartridge inside the image forming apparatus main body.
- FIG. 229 is a side view of the developer cartridge inside the image forming apparatus main body.
- FIG. 231 is a diagram showing the operation of mounting the drum cartridge and developer cartridge on the tray.
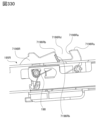
- FIG. 232 is a diagram showing the operation of mounting the drum cartridge and developer cartridge on the tray.
- FIG. 241 is a schematic cross-sectional view of the process cartridge.
- FIG. 242 is a side view of the developer cartridge inside the image forming apparatus main body.
- FIG. 244 is a side view of the developer cartridge inside the image forming apparatus main body.
- FIG. 247 is an exploded perspective view showing the non-driving side of the process cartridge.
- FIG. 250 is a sectional view showing the non-driving side of the process cartridge.
- FIG. 251 is a perspective view showing the pressure unit assembled to the non-drive side bearing.
- FIG. 252 is a sectional view showing the non-drive side bearing and the pressure unit.
- FIG. 265 is a perspective view showing the developing cover member and the moving member.
- FIG. 268 is a side view showing the developing cover member.
- FIG. 278 is a sectional view showing the link unit and cam unit just before the developing unit starts moving from the contact position to the separation position.
- FIG. 284 is an exploded perspective view showing the drive-side cartridge cover member, developer cover member, holding member, and separation spring.
- FIG. 292 is a perspective view showing the arrangement relationship between the lever, the drive-side cartridge cover member, and the developing cover member.
- FIG. 295 is a diagram showing the operation of the delay mechanism.
- FIG. 296 is a diagram showing the operation of the delay mechanism.
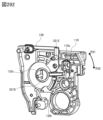
- FIG. 297 is a perspective view showing a process cartridge and a separation abutment mechanism according to the 32nd embodiment.
- FIG. 299 is a sectional view showing the separation and contact mechanism.
- FIG. 300 is a perspective view showing the developing cover member.
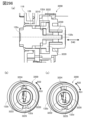
- FIG. 302 is a perspective view showing the drive side bearing and the pressed member.
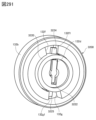
- FIG. 303 is a perspective view showing a stage gear.
- FIG. 304 is a diagram for explaining the method of assembling the separation and contact mechanism.
- FIG. 307 is a diagram for explaining the assembly method of the separation and contact mechanism.
- FIG. 308 is a diagram for explaining the method of assembling the separation and contact mechanism.
- FIG. 309 is a diagram for explaining the method of assembling the separation and contact mechanism.
- FIG. 310 is a side view and a sectional view showing the separation and contact mechanism.
- FIG. 311 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 312 is an exploded perspective view showing the process cartridge.
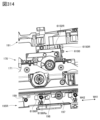
- FIG. 314 is a diagram showing the configuration of the main body of the image forming apparatus.
- FIG. 315 is a diagram showing the separation control member.
- FIG. 316 is a perspective view showing the cartridge pressing mechanism and separation abutment mechanism.
- FIG. 317 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 318 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 319 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 320 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 321 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 322 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 323 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 324 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 327 is a perspective view showing a holding member and a drive-side cartridge cover member according to Example 33.
- FIG. 328 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 329 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 331 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 332 is a diagram showing the operation of the separation and contact mechanism.
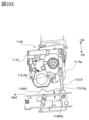
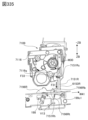
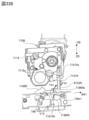
- FIG. 333 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 334 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 335 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 336 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 337 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 338 is a diagram showing the operation of the separation and contact mechanism.
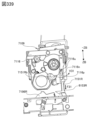
- FIG. 339 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 340 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 341 is a perspective view showing a drive-side cartridge cover member according to a modification of Embodiment 33.
- FIG. 342 is a diagram showing the operation of the separation and contact mechanism.
- FIG. 343 is a diagram showing the operation of the separation and contact mechanism.
- Embodiment 1 of the present disclosure will be described below with reference to the drawings.
- a laser beam printer in which four process cartridges (cartridges) are removable is exemplified as an image forming apparatus.
- the number of process cartridges installed in the image forming apparatus is not limited to this. You may set it appropriately as necessary. [Schematic configuration of image forming apparatus]
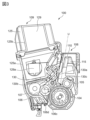
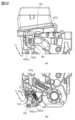
- FIG. 2 is a schematic cross-sectional view of the image forming apparatus M. Further, FIG. 3 is a sectional view of the process cartridge 100.
- This image forming apparatus M is a four-color full-color laser printer using an electrophotographic process, and forms a color image on a recording medium S.
- the image forming apparatus M is of a process cartridge type, and a color image is formed on a recording medium S by attaching a process cartridge removably to an image forming apparatus main body (apparatus main body) 170.
- the side on which the front door 11 is provided is referred to as the front (front), and the surface opposite to the front is referred to as the back (rear).
- the right side is called a drive side
- the left side is called a non-drive side.
- the upper side is the upper surface
- the lower side is the lower surface.
- FIG. 2 is a cross-sectional view of the image forming apparatus M seen from the non-driving side, where the front side of the paper is the non-driving side of the image forming apparatus M, the right side of the paper is the front of the image forming apparatus M, and the back side of the paper is the driving side of the image forming apparatus M. Be on the side.
- the drive side of the process cartridge 100 is the side where a drum coupling member (photoreceptor coupling member), which will be described later, is arranged with respect to the photoreceptor drum axial direction (the axial direction of the rotational axis of the photoreceptor drum).
- the drive side of the process cartridge 100 is the side on which a developing coupling portion 132a, which will be described later, is arranged with respect to the axial direction of the developing roller (developing member) (the axial direction of the rotational axis of the developing roller). Note that the axial direction of the photosensitive drum and the axial direction of the developing roller are parallel, and the longitudinal direction of the process cartridge 100 is also parallel to these.
- the image forming apparatus main body 170 includes four process cartridges 100 (100Y, 100M, 100C, 100K): a first process cartridge 100Y, a second process cartridge 100M, a third process cartridge 100C, and a fourth process cartridge 100K. It is arranged approximately horizontally.
- Each of the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K) has a similar electrophotographic process mechanism, and each uses a different color of developer (hereinafter referred to as toner). .
- Rotational driving force is transmitted to the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K) from a drive output section (details will be described later) of an image forming apparatus main body 170.
- bias voltages (charging bias, developing bias, etc.) are supplied from the image forming apparatus main body 170 to each of the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K).
- each of the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K) of this embodiment includes a photosensitive drum 104 and a charging device as a process device that acts on the photosensitive drum 104. It has a drum unit 108 equipped with. Here, the drum unit may have not only a charging means but also a cleaning means as a process means. Further, each of the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K) includes a developing unit 109 equipped with a developing means for developing an electrostatic latent image on the photosensitive drum 104.
- the layout of an electrophotographic image forming apparatus in which a plurality of photosensitive drums 104 are arranged substantially in a line in this manner is sometimes called an in-line layout or a tandem layout.
- each of the first to fourth process cartridges 100 the drum unit 108 and the developing unit 109 are coupled to each other. A more specific configuration of the process cartridge 100 will be described later.
- the first process cartridge 100Y stores yellow (Y) toner in the developer container 125, and forms a yellow toner image on the surface of the photosensitive drum 104.
- the second process cartridge 100M stores magenta (M) toner in the developer container 125, and forms a magenta toner image on the surface of the photosensitive drum 104.
- the third process cartridge 100C contains cyan (C) toner in the developer container 125, and forms a cyan toner image on the surface of the photosensitive drum 104.
- the fourth process cartridge 100K contains black (K) toner in the developer container 125, and forms a black toner image on the surface of the photosensitive drum 104.
- An intermediate transfer unit 12 as a transfer member is provided below the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K).
- This intermediate transfer unit 12 has a drive roller 12e, a turn roller 12c, and a tension roller 12b, and has a flexible transfer belt 12a wrapped around it.
- the lower surface of the photosensitive drum 104 of each of the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K) is in contact with the upper surface of the transfer belt 12a.
- the contact portion is the primary transfer portion.
- a primary transfer roller 12d is provided inside the transfer belt 12a, facing the photosensitive drum 104.
- a secondary transfer roller 6 is brought into contact with the turn roller 12c via a transfer belt 12a.
- the contact portion between the transfer belt 12a and the secondary transfer roller 6 is a secondary transfer portion.
- a feeding unit 4 is provided below the intermediate transfer unit 12.
- This feeding unit 4 includes a paper feeding tray 4a that accommodates a stack of recording media S, and a paper feeding roller 4b.
- a fixing device 7 and a paper ejecting device 8 are provided at the upper left inside the image forming apparatus main body 170 in FIG.
- the upper surface of the image forming apparatus main body 170 is a paper discharge tray 13.
- the recording medium S is heated and pressurized by a fixing means provided in the fixing device 7 to fix the toner image thereon, and is discharged to the paper discharge tray 13 .
- the operations to form a full color image are as follows.
- the photosensitive drums 104 of each of the first to fourth process cartridges 100 (100Y, 100M, 100C, 100K) are rotated at a predetermined speed (in the direction of arrow A in FIG. 3).
- the transfer belt 12a is also rotationally driven in the forward direction of the rotation of the photosensitive drum (in the direction of arrow C in FIG. 2) at a speed corresponding to the speed of the photosensitive drum 104.
- the laser scanner unit 14 is also driven. In synchronization with the driving of the laser scanner unit 14, a charging roller 105 uniformly charges the surface of the photosensitive drum 104 in each process cartridge to a predetermined polarity and potential.
- the laser scanner unit 14 scans and exposes the surface of each photosensitive drum 104 with laser light U according to the image signal of each color. As a result, an electrostatic latent image is formed on the surface of each photosensitive drum 104 in accordance with the image signal of the corresponding color.
- the formed electrostatic latent image is developed by a developing roller 106 that is rotated at a predetermined speed.
- a magenta toner image corresponding to the magenta component of the full-color image is formed on the photosensitive drum 104 of the second process cartridge 100M. Then, the toner image is primarily transferred onto the transfer belt 12a so as to be superimposed on the yellow toner image that has already been transferred. Similarly, a cyan toner image corresponding to the cyan component of the full-color image is formed on the photosensitive drum 104 of the third process cartridge 100C. Then, the toner image is primarily transferred onto the transfer belt 12a by being superimposed on the yellow and magenta toner images that have already been transferred. Similarly, a black toner image corresponding to the black component of the full-color image is formed on the photosensitive drum 104 of the fourth process cartridge 100K.
- the toner image is primarily transferred onto the transfer belt 12a by being superimposed on the yellow, magenta, and cyan toner images that have already been transferred.
- an unfixed toner image in four full colors of yellow, magenta, cyan, and black is formed on the transfer belt 12a.
- the recording medium S is separated and fed one by one at predetermined control timing.
- the recording medium S is introduced into a secondary transfer portion, which is a contact portion between the secondary transfer roller 6 and the transfer belt 12a, at a predetermined control timing.
- the four-color superimposed toner image on the transfer belt 12a is sequentially transferred to the surface of the recording medium S in a batch while the recording medium S is being conveyed to the secondary transfer section.
- the recording medium S is conveyed to the fixing device 7, the toner image is fixed on the recording medium S, and then the recording medium S is discharged to the paper discharge tray 13.
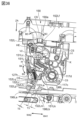
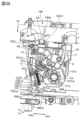
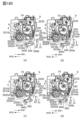
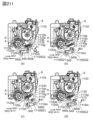
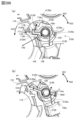
- FIG. 4 is a sectional view of the image forming apparatus M in which the front door 11 is open and the tray 171 is located inside the image forming apparatus main body 170.
- FIG. 5 is a sectional view of the image forming apparatus M in a state in which the front door 11 is open, the tray 171 is located outside the image forming apparatus main body 170, and the process cartridge 100 is housed inside the tray.
- FIG. 6 is a sectional view of the image forming apparatus M with the front door 11 open, the tray 171 located outside the image forming apparatus main body 170, and the process cartridge 100 removed from the tray.
- FIG. 4 is a sectional view of the image forming apparatus M in which the front door 11 is open and the tray 171 is located inside the image forming apparatus main body 170.
- FIG. 5 is a sectional view of the image forming apparatus M in a state in which the front door 11 is open, the tray 171 is located outside the image forming apparatus main body 170, and the process cartridge 100 is housed inside
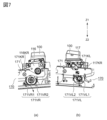
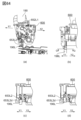
- FIG. 7(a) is a partially detailed view of the tray 171 in the state shown in FIG. 4 when viewed from the drive side.
- FIG. 7(b) is a partially detailed view of the tray 171 in the state shown in FIG. 4 when viewed from the non-driving side.
- the tray 171 is provided with positioning portions 171VR and 171VL for holding the cartridge 100, respectively.
- the positioning portion 171VR has linear portions 171VR1 and 171VR2, respectively.
- the center of the photosensitive drum is determined by the circular arc portions 116VR1 and 116VR2 of the cartridge cover member 116 shown in FIG. 7 coming into contact with the straight portions 171VR1 and 171VR2.
- the tray 171 shown in FIG. 7 has a rotation determining convex portion 171KR. When the rotation determining convex portion 171KR fits into the rotation determining recess 116KR of the cartridge cover member 116 shown in FIG. 7, the attitude of the process cartridge 100 is determined with respect to the apparatus main body 170.
- the process cartridge 100 integrated with the tray 171 is moved in the direction of arrow X1 and inserted to the position shown in FIG. 4. Then, by closing the front door 11 in the direction of arrow R, the process cartridge 100 is pressed by a cartridge pressing mechanism (not shown), which will be described later, and is fixed to the image forming apparatus main body 170 together with the tray 171. Furthermore, the transfer belt 12a comes into contact with the photoreceptor 4 in conjunction with the operation of the cartridge pressing mechanism. In this state, an image is formed (FIG. 2).
- the positioning part 171VR and the positioning part 171VL are made of metal sheet metal because they also serve as reinforcement to maintain rigidity during the pulling operation of the tray 171, but the present invention is not limited to this. . [Cartridge pressing mechanism]
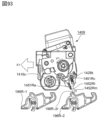
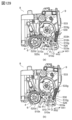
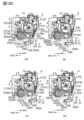
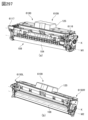
- FIG. 8A shows only the process cartridge 100, tray 171, cartridge pressing mechanisms 190 and 191, and intermediate transfer unit 12 in the state shown in FIG.
- FIG. 8B shows only the process cartridge 100, tray 171, cartridge pressing mechanisms 190, 191, and intermediate transfer unit 12 in the state shown in FIG.
- the memory element pressing unit 190 By closing the front door 11 shown in FIG. 4, the memory element pressing unit 190 and cartridge pressing unit 191 shown in FIG. 8 descend in the direction of arrow Z2.
- the memory element pressing unit 190 mainly has a main body side electrical contact (not shown) that comes into contact with an electrical contact of a memory element (not shown) provided in the process cartridge 100 .
- the storage element 140 and the electrical contacts on the main body side can be brought into contact with each other and made non-contact with each other. In other words, when the front door 11 is closed, the contacts come into contact with each other, and when the front door 11 is opened, the contacts are separated.
- This memory element pressing unit 190 also plays the role of pressing the process cartridge 100 against the above-mentioned positioning portion 171VR.
- the cartridge pressing unit 191 also moves down in the direction of arrow Z2 in conjunction with the operation of closing the front door 11, and plays the role of pressing the process cartridge 100 against the above-mentioned positioning portion 171VL.
- the cartridge pressing mechanisms (190, 191) also have the role of pressing down the moving members 152L, 152R of the process cartridge 100, which will be described later.
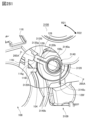
- FIG. 9A is a perspective view of the state shown in FIG. 4 or 5 with the process cartridge 100 and tray 171 omitted.
- FIG. 9B is a perspective view of the state shown in FIG. 1 with the process cartridge 100, front door 11, and tray 171 omitted.
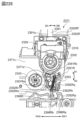
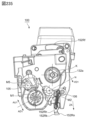
- FIG. 10 is a side view of the process cartridge 100 viewed from the drive side.
- the process cartridge in this embodiment includes a developer coupling section (rotational driving force receiving section) 132a and a drum coupling member (photoreceptor coupling member) 143.
- a developer coupling section rotational driving force receiving section
- a drum coupling member photoreceptor coupling member
- the drum drive coupling 180 described above engages with the drum coupling member 143.
- the main body side developer drive coupling 185 engages with the developer coupling portion 132a, and drive is transmitted to the process cartridge 100.
- the drive transmission to the process cartridge 100 is not limited to two locations as described above, and a mechanism may be provided that inputs the drive only to the drum coupling and transmits the drive to the developing roller.
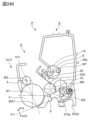
- the intermediate transfer unit 12 of the image forming apparatus main body in this embodiment will be explained using FIG. 9.
- the intermediate transfer unit 12 when the front door 11 is closed, the intermediate transfer unit 12 is raised in the direction of arrow R2 by a link mechanism (not shown), and is moved to a position during image formation (a position where the photosensitive drum 104 and the intermediate transfer belt 12a contact each other). ). Further, by opening the front door 11, the intermediate transfer unit 12 is lowered in the direction of arrow R1, and the photosensitive drum 2 and the intermediate transfer belt 12a are separated. That is, when the process cartridge 100 is set on the tray 171, the photosensitive drum 104 and the intermediate transfer belt 12a come into contact with each other and separate from each other in response to the opening/closing operation of the front door 11.
- the contact-separation operation is such that the intermediate transfer unit 12 moves up and down while drawing a rotation locus centered on the center point PV1 shown in FIG.
- the intermediate transfer belt 12a is driven by receiving force from a gear (not shown) arranged coaxially with the PVI. Therefore, by setting the above-mentioned position PV1 as the center of rotation, the intermediate transfer unit 12 can be raised and lowered without moving the center of the gear. By doing this, there is no need to move the center of the gear, and the position of the gear can be maintained with high precision.
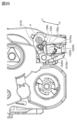
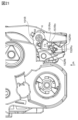
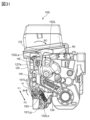
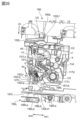
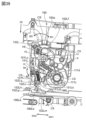
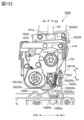
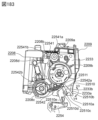
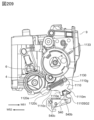
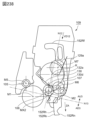
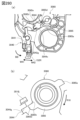
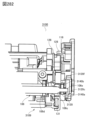
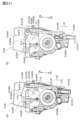
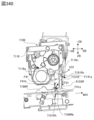
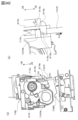
- FIG. 11 is a sectional view of the image forming apparatus M taken along the drive side end surface of the process cartridge 100.
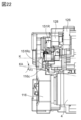
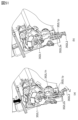
- FIG. 12 is a perspective view of the developer spacing control unit viewed diagonally from above.
- the developer separation control unit 195 controls the separation and contact operation of the development unit 109 with respect to the photosensitive drum 104 by engaging with a part of the development unit 109 .
- the developer spacing control unit 195 is located below the image forming apparatus main body 170, as shown in FIG.
- the developer spacing control unit 195 is arranged vertically lower than the developer coupling section 132a and the drum coupling member 143 (lower in the direction of arrow Z2).
- the development separation control unit 195 is arranged in the longitudinal direction of the photosensitive drum 104 of the intermediate transfer belt 12 (Y1, Y2 direction). That is, the developer spacing control unit 195 has a developer spacing control unit 195R on the driving side and a developer spacing control unit 195L on the non-driving side. By arranging the developer spacing control unit 195 in the dead space of the image forming apparatus main body 170 as described above, the main body can be downsized.
- the development separation control unit 195R has four separation control members (force applying members) 196R corresponding to the process cartridges 100 (100Y, 100M, 100C, 100K).
- the four separation control members have substantially the same shape.
- the developer spacing control unit 195R is always fixed to the main body of the image forming apparatus. However, by a control mechanism (not shown), the separation control member 196R is configured to be movable in the W41 and W42 directions.
- the directions W41 and W42 are substantially parallel to the arrangement direction of the process cartridges 100 installed in the image forming apparatus main body 170. The detailed configuration will be described later.
- the development separation control unit 195L has four separation control members (force applying members) 196L corresponding to the process cartridges 100 (100Y, 100M, 100C, 100K).
- the four separation control members have substantially the same shape.
- the developer spacing control unit 195L is always fixed to the main body of the image forming apparatus. However, by a control mechanism (not shown), the separation control member 196L is configured to be movable in the W41 and W42 directions. The detailed configuration will be described later.
- a part of the development control unit 196 and a part of the development unit 109 must be engaged with each other. They must overlap in the vertical direction (Z1 and Z2 directions). Therefore, after the process cartridge 100 is inserted in the X1 direction, in order to overlap in the vertical direction (Z1, Z2 direction) as described above, a part of the developing device unit (in the case of this embodiment, the moving member 152) is required. It is necessary to make it stand out (details will be explained later). Incidentally, when the developer spacing control unit 195 itself is raised in the same way as the intermediate transfer unit 12 described above in order to engage it, there are problems such as an increase in the operating force of the interlocking front door 11 and a complicated drive train.
- a method is adopted in which the developer spacing control unit 195 is fixed to the image forming apparatus main body 170 and a part of the developing unit 109 (moving member 152) protrudes downward (Z2) within the image forming apparatus main body 170.
- the mechanism for protruding the moving member 152 uses the mechanisms of the memory element pressing unit 190 and the cartridge pressing unit 191 described above as they are, there is no problem as described above, and an increase in the cost of the apparatus body can be suppressed.
- the entire development separation control unit 195 is fixed to the image forming apparatus main body 170. However, in order to engage with the movable member 152 and provide a motion so that the developing unit 109 is in a separated state (separated position, retracted position) and in a contact state (contact position) with respect to the photosensitive drum 104, a part of the developing separation control unit 195 is movable. Details will be described later. [Overall configuration of process cartridge]
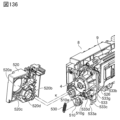
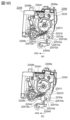
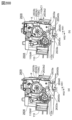
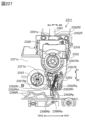
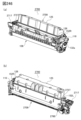
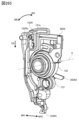
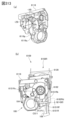
- FIG. 13 is an assembled perspective view of the process cartridge 100 viewed from the drive side, which is one end of the photosensitive drum 104 in the axial direction.
- FIG. 14 is a perspective view of the process cartridge 100 viewed from the drive side.
- the first to fourth process cartridges 100 may differ in the color of the toner contained therein, the amount of toner filled, and the control by the image forming apparatus main body 170.
- these four process cartridges may have differences in dimensions and the like, they have the same basic structure and the same functions, and can perform the same functions. Therefore, hereinafter, one process cartridge 100 will be explained as a representative.
- Each of the process cartridges 100 includes a photosensitive drum (photosensitive member) 104 and a process means that acts on the photosensitive drum 104.
- the process means includes a charging roller 105 as a charging means (charging member) that charges the photosensitive drum 104, and a developing means (developing member) that attaches toner to the photosensitive drum 104 and develops a latent image formed on the photosensitive drum 104.
- the developing roller 106 carries toner on its surface.
- the process cartridge 100 includes a cleaning blade, a brush, or the like that comes into contact with the photosensitive drum 104 as a cleaning means (cleaning member) for removing residual toner remaining on the surface of the photosensitive drum 104 as an additional process means.
- a light guide member such as a light guide or a lens, a light source, etc. for irradiating light onto the photosensitive drum 104 may be provided as a static eliminating means for neutralizing the surface of the photosensitive drum 104.
- the process cartridge 100 is divided into a drum unit (first unit) 108 (108Y, 108M, 108C, 108K) and a developing unit (second unit) 109 (109Y, 109M, 109C, 109K). [Drum unit configuration]
- the drum unit 108 includes a photosensitive drum 104, a charging roller 105, a first drum frame 115, and a second drum frame attached and fixed to the first drum frame 115. It has a drive side cartridge cover member 116 and a non-drive side cartridge cover member 117 as parts.
- the photosensitive drum 104 is rotatably supported about a rotation axis (rotation center) M1 by a driving side cartridge cover member 116 and a non-driving side cartridge cover member 117, which are arranged at both ends of the process cartridge 100 in the longitudinal direction.
- first drum frame body part 115, a driving side cartridge cover member 116 and a non-driving side cartridge cover member 117 as a second drum frame body part are connected to a drum frame body (first frame body) that rotatably supports the photosensitive drum 104. (or a photoreceptor frame).
- a coupling member 143 for transmitting driving force to the photosensitive drum 104 is provided at one end of the photosensitive drum 104 in the longitudinal direction.
- the coupling member 143 engages with the main body side drum drive coupling 180 (see FIG. 9) serving as a drum drive output section of the image forming apparatus main body 170.
- the driving force of a drive motor (not shown) of the image forming apparatus main body 170 is transmitted to the photosensitive drum 104, and the photosensitive drum 104 is rotated in the direction of arrow A.
- the photosensitive drum 104 has a drum flange 142 at the other end in the longitudinal direction.
- the charging roller 105 is supported by a drum frame 115 so as to be able to contact the photosensitive drum 104 and rotate as a result of the rotation.
- the rotation axis M1 is parallel to the longitudinal direction of the process cartridge 100 and the longitudinal direction of the drum unit 108.
- the developing unit 109 includes a developing roller 106, a toner transport roller (developer supply member) 107, a developing blade 130, a developing container 125, and the like.
- the developer container 125 includes a lower frame body 125a and a lid member 125b.
- the lower frame body 125a and the lid member 125b are coupled by ultrasonic welding or the like.
- the developer container 125 which is the second frame, has a toner storage portion 129 that stores toner to be supplied to the development roller 106.
- a driving side bearing 126 and a non-driving side bearing 127 are respectively attached and fixed to both ends of the developer container 125 in the longitudinal direction.
- the developing container 125 rotatably supports the developing roller 106, the toner conveying roller 107, and the stirring member 129a via a driving side bearing 126 and a non-driving side bearing 127, and holds the developing blade 130.
- the developer container 125, the driving side bearing 126, and the non-driving side bearing 127 constitute a developing frame (second frame) that rotatably supports the developing roller 106 around the rotation axis (rotation center) M2. are doing.
- the stirring member 129a stirs the toner in the toner storage section 129 by rotating.
- the toner transport roller (developer supply member) 107 contacts the developing roller 106 and supplies toner to the surface of the developing roller 106 while also stripping the toner from the surface of the developing roller 106.
- the developing blade 130 is constructed by attaching an elastic member 130b made of sheet metal with a thickness of about 0.1 mm to a support member 130a made of a metal material having an L-shaped cross section by welding or the like.
- the developing blade 130 regulates the toner layer thickness (toner layer thickness) on the peripheral surface of the developing roller 106, and forms a toner layer of a predetermined thickness between the elastic member 130b and the developing roller 106.
- the developing blade 130 is attached to the developing container 125 at two places, one end side and the other end side in the longitudinal direction, with fixing screws 130c.
- the developing roller 106 is composed of a metal core 106c and a rubber portion 106d.
- a developer coupling portion 132a for transmitting driving force to the developer unit 109 is provided at one end of the developer unit 109 in the longitudinal direction.
- the development coupling section 132a engages with a main body side development drive coupling 185 (see FIG. 9) serving as a development drive output section of the image forming apparatus main body 170, and rotates a drive motor (not shown) of the image forming apparatus main body 170. It is a member that rotates in response to driving force.
- the driving force received by the developer coupling portion 132a is transmitted by a drive train (not shown) provided in the developer unit 109, thereby making it possible to rotate the developer roller 106 in the direction of arrow D in FIG. be.
- a developer cover member 128 is provided at one end in the longitudinal direction of the developer unit 109 to support and cover the developer coupling portion 132a and a drive train (not shown).
- the outer diameter of the developing roller 106 is set smaller than the outer diameter of the photosensitive drum 104.
- the outer diameter of the photosensitive drum 104 is set within the range of ⁇ 18 to ⁇ 22
- the outer diameter of the developing roller 106 is set within the range of ⁇ 8 to ⁇ 14. By setting the outer diameter to this value, efficient arrangement becomes possible.
- the rotation axis M2 is parallel to the longitudinal direction of the process cartridge 100 and the developing unit 109. [Assembling the drum unit and developing unit]
- the assembly of the drum unit 108 and the developing unit 109 will be explained using FIG. 13.
- the drum unit 108 and the developing unit 109 are coupled by a driving side cartridge cover member 116 and a non-driving side cartridge cover member 117 provided at both ends of the process cartridge 100 in the longitudinal direction.
- the drive-side cartridge cover member 116 provided at one end in the longitudinal direction of the process cartridge 100 is provided with a developing unit support hole 116a for swingably (moveably) supporting the developing unit 109.
- a non-drive side cartridge cover member 117 provided at the other longitudinal end of the process cartridge 100 is provided with a developing unit support hole 117a for swingably supporting the developing unit 109.
- the drive side cartridge cover member 116 and the non-drive side cartridge cover member 117 are provided with drum support holes 116b and 117b for rotatably supporting the photosensitive drum 104.
- the outer diameter portion of the cylindrical portion 128b of the developer cover member 128 is fitted into the developer unit support hole 116a of the drive side cartridge cover member 116.
- the outer diameter portion of the cylindrical portion (not shown) of the non-drive side bearing 127 is fitted into the developing unit support hole 117a of the non-drive side cartridge cover member 117.
- both longitudinal ends of the photosensitive drum 104 are fitted into the drum support hole 116b of the drive side cartridge cover member 116 and the drum support hole 117b of the non-drive side cartridge cover member 117.
- the drive side cartridge cover member 116 and the non-drive side cartridge cover member 117 are fixed to the drum unit 108 using screws, adhesives, etc. (not shown).
- the developing unit 109 is rotatably supported by the driving side cartridge cover member 116 and the non-driving side cartridge cover member 117 with respect to the drum unit 108 (photosensitive drum 104).
- the developing roller 106 can be positioned at a position where it acts on the photosensitive drum 104 during image formation.
- FIG. 14 shows a state in which the drum unit 108 and the developing unit 109 are assembled through the above steps and integrated as a process cartridge 100.
- the axis connecting the center of the developing unit support hole 116a of the driving side cartridge cover member 116 and the center of the developing unit supporting hole 117a of the non-driving side cartridge cover member 117 is defined as a swing axis (rotation axis, rotation center) K. It is called.
- the cylindrical portion 128b of the developer cover member 128 on one end side is coaxial with the developer coupling portion 132a. That is, the rotational axis of the developer coupling portion 132a is coaxial with the swing axis K. That is, the swing axis K is also the rotation axis K of the developer coupling section 132a.
- the developing unit 109 is rotatably supported around a swing axis K.
- the rotational axis M1, the rotational axis M2, and the swing axis K are substantially parallel to each other. Further, in this state, the rotational axis M1, the rotational axis M2, and the swing axis K are each substantially parallel to the longitudinal direction of the process cartridge 100. [Configuration of separation and contact mechanism 150]
- the process cartridge has a separation contact mechanism 150R on the drive side and a separation contact mechanism 150L on the non-drive side.
- FIG. 15 shows an assembled perspective view of the drive side of the developing unit 109 including the separation and contact mechanism 150R.
- FIG. 16 shows an assembled perspective view of the non-drive side of the developing unit 109 including the separation and contact mechanism 150L.
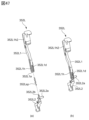
- the separation and contact mechanism 150R includes a spacer 151R that is a regulating member (holding member), a moving member 152R that is a pressing member (force applying member), and a tension spring 153.
- the separation and contact mechanism 150L includes a spacer 151L that is a regulating member, a moving member 152L that is a pressing member (force applying member), and a tension spring 153. [Detailed explanation of spacer 151R]
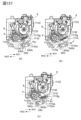
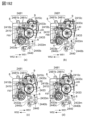
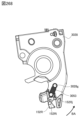
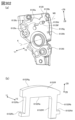
- FIG. 17A is a front view of the spacer 151R as viewed from the longitudinal direction of the drive side of the process cartridge 100.
- 17(b) and 17(c) are individual perspective views of the spacer 151R, and
- FIG. 17(d) shows the spacer 151R in the direction of arrow Z2 in FIG. 17(a) (vertically upward in the image forming state). This is the view.
- the spacer 151R has an annular supported portion 151Ra, and has a separation holding portion (holding portion) 151Rb that protrudes from the supported portion 151Ra in the radial direction of the supported portion 151Ra.
- the tip of the spacer 151Rb has an abutment surface (abutment surface) that has an arc shape centered on the swing axis H of the spacer 151R and is inclined at an angle ⁇ 1 with respect to a line HA substantially parallel to the swing axis H. part) has 151Rc. Note that the angle ⁇ 1 is set to satisfy equation (1). 0° ⁇ 1 ⁇ 45°...(1)
- the separation holding part (holding part) 151Rb is a part that connects the supported part 151Ra and the contact surface 151Rc, and has enough rigidity to maintain the separation position of the development unit 109 when it is sandwiched between the drum unit 108 and the development unit 109. are doing.
- the spacer 151R has a regulated surface (regulated portion) 151Rk adjacent to the contact surface 151Rc. Furthermore, the spacer 151R has a regulated surface (regulated portion) 151Rd that protrudes in the Z2 direction from the supported portion 151Ra, and has an arcuate shape that protrudes from the regulated surface 151Rd in the direction of the swing axis H of the supported portion 151Ra. It has a pressed surface (pressed part at the time of contact) 151Re.
- the spacer 151R has a main body part 151Rf that is connected to the supported part 151Ra, and the main body part 151Rf has a spring hook part 151Rg that projects in the direction of the swing axis H of the supported part 151Ra. Further, the main body portion 151Rf has a rotation prevention portion 151Rm protruding in the Z2 direction, and a rotation prevention surface 151Rn is provided in a direction facing the pressed surface 151Re. [Detailed explanation of moving member 152R]
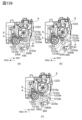
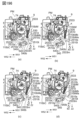
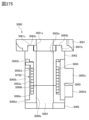
- FIG. 18(a) is a front view of the moving member 152R as viewed from the longitudinal direction of the process cartridge 100
- FIGS. 18(b) and 18(c) are perspective views of the moving member 152R.
- the moving member 152R has an oblong supported portion 152Ra having an oblong shape.
- the longitudinal direction of the oblong shape of the oblong supported portion 152Ra is indicated by an arrow LH
- the upper direction thereof is indicated by an arrow LH1
- the lower direction thereof is indicated by an arrow LH2.
- the direction in which the oblong supported portion 152Ra is formed is defined as HB.
- the moving member 152R has a protruding part (force receiving part) 152Rh formed on the downstream side of the oblong supported part 152Ra in the arrow LH2 direction.
- the movable member 152R has a pushed part 152Re that protrudes in the arrow LH1 direction and in a direction substantially perpendicular to the arrow LH1 direction, and has an arcuate pushed face (moving force receiving part, operating force receiving part) on the downstream side in the arrow LH1 direction. part) 152Rf, and has a push-in restriction surface 152Rg on the upstream side.
- the moving member 152R has a first regulated surface (first regulated portion) 152Rv extending from the main body portion 152Rb on the upstream side in the direction of arrow LH2 than the protruding portion 152Rh. Furthermore, the moving member 152R has a second regulated surface 152Rw that is adjacent to the first regulated surface 152Rv and substantially parallel to the developing frame pressing surface (developing frame pressing portion, second frame pressing portion) 152Rq.
- the protruding portion 152Rh has a first force receiving portion (retreat force receiving portion, separation force receiving portion) 152Rk and a second force receiving portion (receiving force receiving portion) 152Rk, which are disposed opposite to each other in a direction substantially orthogonal to the arrow LH2 direction and at a terminal end in the arrow LH2 direction.
- (contact force receiving part) 152Rn The first force receiving part 152Rk and the second force receiving part 152Rn are a first force receiving surface (retreat force receiving surface, separation force receiving surface) 152Rm and a second force receiving surface (contact force receiving surface) extending in the HB direction and having an arc shape.
- (receiving surface) has 152Rp.
- the protruding portion 152Rh has a spring hanging portion 152Rs that protrudes in the H direction and a locking portion 152Rt, and the locking portion 152Rt has a locking surface 152Ru that faces in the same direction as the second force receiving surface 152Rp.
- the moving member 152R is a part of the main body portion 152Rb, is disposed upstream in the arrow LH2 direction than the second force receiving portion 152Rn, and has a developing frame pressing surface 152Rq facing in the same direction as the second force receiving surface 152Rp. Furthermore, the moving member 152R has a spacer pressing surface (pressing portion) 152Rr that is orthogonal to the first regulated surface 152Rv and is arranged to face the developing frame pressing surface 152Rq.
- the LH1 direction is substantially the same direction as the Z1 direction
- the LH2 direction is substantially the same direction as the Z2 direction
- the HB direction is substantially the same as the longitudinal direction of the process cartridge 100.
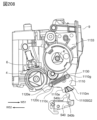
- FIG. 19 is a perspective view of the process cartridge 100 after the spacer 151R is assembled, viewed from the drive side.
- the outer diameter portion of the cylindrical portion 128b of the developing cover member 128 fits into the developing unit support hole 116a of the drive side cartridge cover member 116.
- the developing unit 109 is rotatably supported with respect to the photosensitive drum 104 about the swing axis K.
- the developing cover member 128 has a cylindrical first support portion 128c and a second support portion 128k that protrude in the direction of the swing axis K.
- the outer diameter of the first support portion 128c fits into the inner diameter of the supported portion 151Ra of the spacer 151R, and rotatably supports the spacer 151R.
- the swing axis H is the center of swing of the spacer 151R assembled to the developer cover member 128.
- the developing cover member 128 has a first retaining portion 128d that projects in the direction of the swing axis H. As shown in FIG. 15, movement of the spacer 151R assembled to the developer cover member 128 in the direction of the swing axis H is regulated by the first retaining portion 128d coming into contact with the spacer 151R.
- the outer diameter of the second support portion 128k fits into the inner wall of the oblong supported portion 152Ra of the moving member 152R, and supports the moving member 152R rotatably and movably in the oblong direction.
- the center of swing of the movable member 152R assembled to the developing cover member 128 is defined as the movable member swing axis HC.
- movement of the movable member 152R assembled to the developer cover member 128 in the direction of the movable member swing axis HC is regulated by the second retaining portion 128m coming into contact with the spacer 151R.
- FIG. 10 a part of the drive-side cartridge cover member 116 and a part of the developer cover member 128 are partially shown so that the fitting part between the oblong supported part 151Ra of the moving member 152R and the cylindrical part 128b of the developer cover member 128 can be seen. It is a cross-sectional view partially omitted along the cross-sectional line CS.
- the separation and abutment mechanism 150R includes a spacer part urging part (holding part urging part) that urges the spacer 151R to rotate in the direction of arrow B1 in the figure about the swing axis H, and moves the moving member 152R in the direction of the arrow B1.
- a tension spring 153 is provided as a biasing member (holding part biasing member) including a force receiving part biasing part (projection part biasing part) that biases in the B3 direction.
- the tension spring 153 is a coil spring and is an elastic member. Note that the arrow B3 direction is a direction substantially parallel to the oblong longitudinal direction LH2 direction (see FIG. 18) of the oblong supported portion 152Ra of the movable member 152R.
- the tension spring 153 is engaged with and connected to a spring hook 151Rg provided on the spacer 151R and a spring hook 152Rs provided on the moving member 152R, and is assembled between them.
- the tension spring 153 applies a force to the spring hanging portion 151Rg of the spacer 151R in the direction of the arrow F2 in FIG. 10, thereby applying a biasing force to rotate the spacer 151R in the direction of the arrow B1. Furthermore, the tension spring 153 exerts a biasing force to move the moving member 152R in the direction of arrow B3 (direction toward the storage position (reference position, standby position)) by applying force in the direction of arrow F1 to the spring hook 152Rs of the moving member 152R. is giving.
- a line GS connects the spring hook 151Rg of the spacer 151R and the spring hook 152Rs of the force holding member 152R
- a line HS connects the spring hook 152Rs of the moving member 152R and the moving member swing axis HC.
- the angle ⁇ 2 formed by the line GS and the line HS is set so as to satisfy the following equation (2), with the clockwise direction centered on the spring hanging portion 152Rs of the moving member 152R being positive.
- the moving member 152R is urged to rotate in the direction of arrow BA about the moving member swing axis HC. 0° ⁇ 2 ⁇ 90°...(2)
- the developer drive input gear (developer coupling member) 132 provided with the developer coupling portion 132a has the inner diameter of the cylindrical portion 128b of the developer cover member 128 and the outer periphery of the cylindrical portion 32b of the developer drive input gear 132.
- the surfaces fit together, and in addition, the support portion 126a of the drive-side bearing 126 and the cylindrical portion (not shown) of the development drive input gear 132 fit together.
- the developer drive input gear 132 is supported rotatably about the rotation axis K.
- a developing roller gear 131 is fixed to the driving side end of the developing roller 106, and a toner transporting roller gear 133 is fixed to the driving side end of the toner transporting roller (developer supply member) 107.
- the developing drive input gear (developing coupling member) 132 has a gear portion on the outer circumferential surface of the cylinder, and this gear portion meshes with the developing roller gear 131, the toner transport roller gear 133, and other gears, and the developing coupling portion 132a engages with these gears. Transmits the received rotational driving force.
- the spacer 151R and the moving member 152R in the direction of the swing axis K will be explained.
- the spacer 151R and the development drive input gear 132 are arranged on the side where the drive-side cartridge cover member 116 is arranged (outside in the longitudinal direction) with the development cover member 128 in between.
- a moving member 152R is arranged on the side (inner side in the longitudinal direction).
- the arrangement positions are not limited to this, and the arrangement positions of the spacer 151R and the moving member 152R may be exchanged, and the spacer 151R and the moving member 151R and the moving member may be moved to one side in the direction of the swing axis K with respect to the developing cover member 128. 152R may be arranged. Furthermore, the arrangement order of the spacer 151R and the moving member 152R may be reversed.
- the developer cover member 128 forms the developer unit 109 by being fixed to the developer container 125 via the drive-side bearing 126.
- the fixing method in this embodiment is to use a fixing screw 145 and an adhesive (not shown) as shown in FIG. 15, but the fixing method is not limited to this, and bonding such as welding by heating or pouring resin and hardening is also possible. It may be a method.
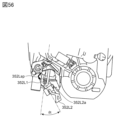
- FIG. 20 is an enlarged cross-sectional view of the area around the separation holding portion 151R in FIG. 10, with part of the tension spring 153 and the spacer 151R partially omitted along the partial cross-sectional line CS4.
- the first regulated surface 152Rv of the movable member 152R contacts the first regulated surface 128h of the developing cover member 128 due to the biasing force of the tension spring 153 in the F1 direction in the drawing.
- the second regulated surface 152Rw of the moving member 152R comes into contact with the second regulated surface 128q of the developing cover member 128 and is positioned.
- This position is referred to as the storage position of the moving member 152R and the protrusion 152Rh. Note that the storage position can also be referred to as a reference position or a standby position.
- the spacer 151R rotates in the B1 direction around the swing axis H by the biasing force of the tension spring 153 in the F2 direction, and the regulated surface 151Rd of the spacer 151R contacts the spacer pressing surface 152Rr of the moving member 152R, and the rotation is stopped.
- This position is referred to as the separation holding position (regulating position, first position) of the spacer 151R.
- FIG. 21 is an enlarged view of the area around the separation holding portion 151R in FIG. 10 for illustrative purposes, and the tension spring 153 is omitted.
- the process cartridge 100 having the separation and contact mechanism 150R described in this embodiment is dropped in the JA direction in FIG. 21 when being transported.
- the spacer 151R receives a force to rotate in the direction of arrow B2 due to its own weight about the separation holding swing axis H.
- the rotation prevention surface 151Rn of the spacer 151R comes into contact with the locking surface 152Ru of the moving member 152R, and the spacer 151R receives a force in the F3 direction in the figure to suppress the rotation in the B2 direction.
- rotation of the spacer 151R in the B2 direction during distribution can be suppressed, and the separation between the photosensitive drum 104 and the developing unit 109 can be prevented from being impaired.
- the tension spring 153 is used as a biasing means for biasing the spacer 151R to the separated holding position and the moving member 152R to the storage position, but the biasing means is not limited to this.
- a torsion coil spring, a leaf spring, or the like may be used as a biasing means to bias the moving member 152R to the storage position and the spacer 151R to the spaced-apart position.
- the material of the biasing means may be metal, mold, or the like, as long as it has elasticity and can bias the spacer 151R and the moving member 152R.
- the developing unit 109 equipped with the separating and contacting mechanism 150R is integrally connected to the drum unit 108 by the drive side cartridge cover member 116 as described above (state in FIG. 19).
- FIG. 22 shows a view seen from the direction of arrow J in FIG. 19.
- the drive side cartridge cover 116 of this embodiment has an abutted surface (abutted portion) 116c.
- the abutted surface 116c is formed with an inclination of an angle ⁇ 3 with respect to the swing axis K, as shown in FIG.
- the angle ⁇ 3 is preferably the same as the angle ⁇ 1 forming the contact surface 151Rc of the spacer 151R, but is not limited to this.
- the abutted surface 116c is the abutment surface of the spacer 151R located at the separated holding position when the drive side cartridge cover member 116 is assembled to the developing unit 109 and the drum unit 108. Opposed to 151Rc. Further, the abutted surface 116c comes into contact with the abutting surface 151Rc by the biasing force of a developing pressure spring 134, which will be described later.
- the developing unit 109 is positioned with a gap P1 between the developing roller 106 and the photosensitive drum 104 of the developing unit 109. configured.
- FIG. 1 is a side view of the process cartridge 100 installed inside the image forming apparatus main body 170 as seen from the drive side.
- FIG. 1A shows a state in which the developing unit 109 is separated from the photosensitive drum 104.
- FIG. 1B shows a state in which the developing unit 109 is in contact with the photosensitive drum 104.
- this state can be said to be a state in which the drive-side cartridge cover member 116 positions and stably holds the developing cover member 128 via (sandwiching) the separation holding portion 151Rb of the spacer 151R.
- the drum unit 108 positions and stably holds the developing unit 109 via the spacer 151R.
- the pushed portion 152Re of the moving member 152R is pushed in the ZA direction.
- the moving member 152R and the protrusion 152Rh move linearly from the standby position in the ZA direction (operation direction, predetermined direction) and reach the protrusion position.
- the ZA direction is a direction parallel to a direction perpendicular to the rotational axis M2 of the developing roller 106 or the rotational axis M1 of the photosensitive drum 108. Therefore, the protrusion 152Rh in the protrusion position is located downstream in the ZA direction than the protrusion 152Rh in the standby position.
- the protrusion 152Rh in the protrusion position is located further from the swing axis K than the protrusion 152Rh in the standby position.
- the protruding portion 152Rh in the protruding position protrudes in the ZA direction (disposed downstream in the ZA direction) than the drum frame and the developing frame.
- the drum frame includes the first drum frame 115, the drive side cartridge cover member 116, and the non-drive side cartridge cover member 117
- the developing frame includes the developer container 125, the drive side cartridge cover member 116, and the drive side cartridge cover member 117. They are a side bearing 126 and a non-drive side bearing 127.
- the ZA direction is a direction that intersects the arrangement direction of the four process cartridges 100, the W41 direction, and the W42 direction.
- the attitude shown in FIG. 1 is also an attitude in which the rotation axis M1 of the photosensitive drum 104 is horizontal and the photosensitive drum 104 is disposed at the lower part of the process cartridge 100, when the vertical direction in the figure is taken as the vertical direction. I can say it.
- the protrusion 152Rh can be said to protrude downward by protruding in the ZA direction.
- the ZA direction vector in this posture is a vector that includes at least a vertical component. Therefore, it can be said that the protruding portion 152Rh protrudes downward by protruding in the ZA direction also in this posture.
- the moving member 152R is movable in the ZA direction and the opposite direction while maintaining the spacer 151R at the separated holding position (first position). Therefore, even when the movable member 152R and the protrusion 152Rh are in the operating position, the spacer 151R is located in the separation holding position (first position). Further, at this time, the pressed surface 151Re of the spacer 151R is in contact with the spacer pressing surface 152Rr of the moving member 152R by the tension spring 153 as described above.
- the moving member 152R rotates in the direction of the arrow BB around the moving member swing axis HC, and the spacer pressing surface 152Rr presses the regulated portion 151Rd. , rotate the spacer 151R in the direction of arrow B2.
- the spacer 151R rotates in the direction of arrow B2
- the abutting surface 151Rc separates from the abutted surface 116c, and the developing unit 109 becomes rotatable in the direction of arrow V2 about the swing axis K from the separated position.
- the developing unit 109 rotates in the V2 direction from the separated position, and the developing roller 106 of the developing unit 109 comes into contact with the photosensitive drum 104.
- the developing roller 106 includes a metal shaft (core metal), a rubber layer covering the surrounding area, and a roller attached to the metal shaft at an axial end portion of the rubber layer, and the surfaces of the rubber layer and the roller are It contacts the photosensitive drum 104. Since the rubber layer deforms, by determining the distance between the rotational axis M2 of the developing roller 106 and the rotational axis M1 of the photosensitive drum 104 using rollers, the distance between the rotational axis M2 and the rotational axis M1 can be maintained with high accuracy.
- the position of the developing unit 109 where the developing roller 106 and the photosensitive drum 104 are in contact is referred to as a contact position (developing position) (the state shown in FIG. 1(b)).
- the contact position (development position) where the developing roller 106 contacts the photosensitive drum 104 is not only the position where the surface of the developing roller 106 contacts the surface of the photosensitive drum 104 but also the position where the developing roller 106 contacts the surface of the photosensitive drum 104 when the developing roller 106 rotates. It also includes a position where the toner carried on the surface of the photosensitive drum 104 can come into contact with the surface of the photosensitive drum 104 .
- the contact position can be said to be a development position where the toner carried on the surface of the development roller 106 can be transferred (attached) to the surface of the photosensitive drum 104 when the development roller 106 rotates.
- a separation release position permissible position, second position.
- the drive-side bearing 126 has a first pressed surface (pressed portion during separation) 126c that is a surface orthogonal to the swing axis K.
- the drive side bearing 126 is fixed to the developing unit 109. Therefore, when the first force receiving portion 152Rk of the movable member 152R is pressed in the direction of arrow 41 with the developing unit 109 in the contact position, the developing frame pressing surface 152Rq contacts the first pressed surface 126c. As a result, the developing unit 109 rotates about the swing axis K in the direction of the arrow V1 and moves to the separated position (retracted position) (the state shown in FIG. 1(a)).
- the direction in which the first force receiving surface 126c moves is indicated by an arrow W41 in FIGS. 1(a) and 1(b). Further, the direction opposite to the arrow W41 is an arrow W42, and the arrow W41 and the arrow W42 are substantially horizontal directions (X1, X2 directions). As described above, the second force receiving surface 152Rp of the moving member 152R assembled to the developing unit 109 is located upstream of the first force receiving surface 126c of the drive side bearing 126 in the direction of arrow W41.
- first force receiving surface 126c and the pressed surface 151Re of the spacer 151R are arranged at a position where at least a portion thereof overlaps in the W1 and W2 directions.
- the detailed operation of the separation and contact mechanism 150R within the image forming apparatus main body 170 will be described next. [Attachment of process cartridge 100 to image forming apparatus main body 170 (drive side)]
- FIG. 12, FIG. 23, and FIG. 24 when the process cartridge 100 is installed in the image forming apparatus main body 170, the separation abutment mechanism 150R of the process cartridge 100 and the development separation control unit of the image forming apparatus main body 170 are shown.
- the engagement operation of 195 will be explained. Note that these figures are cross-sectional views in which a part of the developing cover member 128 and a part of the drive-side cartridge cover member 116 are partially omitted along partial cross-sectional lines CS1 and CS2, respectively, for the purpose of explanation.
- FIG. 23 is a view of the process cartridge 100 seen from the driving side when the process cartridge 100 is mounted on a cartridge tray 171 (not shown) of the image forming apparatus M and the cartridge tray 171 is inserted into the first mounting position.
- components other than the process cartridge 100, cartridge pressing unit 191, and separation control member 196R are omitted.
- both image forming apparatus main bodies 170 of this embodiment have separation control members 196R corresponding to each process cartridge 100 as described above.
- the separation control member 196R is disposed closer to the lower surface of the image forming apparatus main body 170 than the spacer 151R when the process cartridge 100 is located at the first inner position and the second inner position.
- the separation control member 196R protrudes toward the process cartridge 100, and has a first force application surface (force application section, contact force application section) 196Ra and a second force application surface (retreat force application section, separation force application section) facing each other via a space 196Rd.
- Application part has 196Rb.
- the first force applying surface 196Ra and the second force applying surface 196Rb are connected to each other via a connecting portion 196Rc on the lower surface side of the image forming apparatus main body 170.
- the separation control member 196R is rotatably supported by a control sheet metal 197 about a rotation center 196Re.
- the spacing member 196R is always biased in the E1 direction by a biasing spring.
- the control sheet metal 197 is configured to be movable in the W41 and W42 directions by a control mechanism (not shown), so that the separation control member 196R is configured to be movable in the W41 and W42 directions.
- the cartridge pressing unit 191 descends in the direction of arrow ZA, and the first force applying portion 191a moves toward the moving member 152R. It comes into contact with the pushed surface 152Rf. Thereafter, when the cartridge pressing unit 191 descends to a predetermined position, which is the second mounting position, the protrusion 152Rh of the moving member 152R moves in the ZA direction (operating direction, predetermined direction), and the process cartridge 100 protrudes downward in the Z2 direction. (Status in Figure 24).
- the ZA direction is a direction that intersects (orthogonally in this embodiment) the rotational axis M2 of the developing roller 106, the rotational axis M1 of the photosensitive drum 108, and the swing axis HC.
- This position is referred to as the protruding position of the moving member 152R and the protruding portion 152Rh.
- the protruding position can also be referred to as a force receiving position or an operating position.
- a gap T4 is created between the first force applying surface 196Ra of the separation control member 196R and the second force receiving surface 152Rp of the moving member 152R, and a gap T4 is created between the second force applying surface 196Rb and the second force applying surface 196Rb.
- a gap T3 is formed between the first force receiving surface 152Rm and the first force receiving surface 152Rm. Then, it is located at a second mounting position where the separation control member 196R does not act on the moving member 152R. Note that this position of the separation control member 196R can be said to be the home position.
- the second force receiving surface 152Rp of the moving member 152R and the first force applying surface 196Ra of the separation control member 196R are arranged so as to partially overlap in the W41 and W42 directions.
- the first force receiving surface 152Rm of the moving member 152R and the second force applying surface 196Rb of the separation control member 196R are arranged so as to partially overlap in the W41 and W42 directions.
- FIGS. 24 to 26 a part of the developer cover member 128, a part of the drive-side cartridge cover member 116, and a part of the drive-side bearing 126 are partially shown along partial cross-sectional lines CS1, CS2, and CS3, respectively, for the purpose of explanation. It is an abbreviated sectional view.
- the developing coupling 32 receives a driving force from the image forming apparatus main body 170 in the direction of arrow V2 in FIG. 24, and the developing roller 106 rotates. That is, the developing unit 109 having the developing coupling 32 receives torque (driving torque) in the direction of arrow V2 about the swing axis K from the image forming apparatus main body 170.
- torque driving torque
- FIG. 24 A case will be described in which the developing unit 109 shown in FIG. 24 is in the separated position and the spacer 151R is in the separated holding position.
- the separation control member 196R of this embodiment is configured to be movable in the direction of arrow W42 in FIG. 24 from the home position.
- the second force applying surface 196Ra of the separation control member 196R and the second force receiving surface 152Rp of the second force receiving portion 152Rn of the moving member 152R come into contact, and the moving member 152R becomes the moving member.
- the first force applying surface 196Ra applies a contact force to the second force receiving surface 152Rp
- the moving direction of the protrusion 152Rh when the moving member 152R rotates in the BB direction is referred to as a first direction.
- the spacer 151R is rotated in the B2 direction while the spacer pressing surface 152Rr of the moving member 152R contacts the pressed surface 151Re of the spacer 151R.
- the spacer 151R is then rotated by the moving member 152R to a separation release position (second position) where the contact surface 151Rc and the contact surface 116c are separated.
- the position of the separation control member 196R shown in FIG. 25 that moves the spacer 151R to the separation release position (second position) is referred to as a first position.
- the development unit 109 receives the driving torque from the image forming apparatus main body 170 and the development pressure spring (biasing portion) 134 described later. rotates in the V2 direction.
- the developing unit 109 then moves to a contact position where the developing roller 106 and the photosensitive drum 104 contact each other (the state shown in FIG. 25).
- the spacer 151R urged in the direction of arrow B1 by the tension spring 153 is maintained at the separation release position (second position) by the regulated surface 151Rk coming into contact with the spacer regulating surface 116d of the drive side cartridge cover member 116. be done.
- the separation control member 196R moves in the W41 direction and returns to the home position.
- the movable member 152R is rotated in the BA direction by the tension spring 153, and shifts to a state where the developing frame pressing surface 152Rq of the movable member 152R and the first pressed surface 126c of the drive side bearing 126 are in contact (FIG. 26 condition).
- the moving member 152R and the protrusion 152Rh are in the operating position.
- the separation control member 196R moves from the home position to the first position, thereby applying a contact force to the moving member 152R, rotating the moving member 152R, and moving the spacer 151R to the separation holding position. (first position) to a separation release position (second position). This allows the developing unit 109 to move from the separated position to the abutting position where the developing roller 9 and the photosensitive drum 104 abut.
- the contact force applied from the separation control member 196R is transmitted to the spacer 151R via the moving member 152R to move the spacer 151R from the separation holding position (first position) to the separation release position (second position), As a result, the developing unit 109 is moved from the separated position (retreat position) to the contact position (developing position).
- the photosensitive drum 104 can be said to be a positioning section (second positioning section) that determines the position of the developing unit 109 at the developing position with respect to the drum unit 108. Furthermore, it can be said that the developing unit 109 is stably held by the drum unit 108 at this time. At this time, the spacer 151R at the separation release position is not directly involved in positioning the developing unit 109.
- the spacer 151R prevents the developing roller 106 from coming into contact with the photosensitive drum 104 and determining the position of the developing unit 109 relative to the drum unit 108 (permissible). are doing). In other words, it can be said that the spacer 151R in the separation release position (second position) creates a situation in which the drum unit 108 can stably hold the developing unit 109 at the contact position (developing position).
- the position of the developing unit 109 with respect to the drum unit 108 can be determined via the spacer 151R. It's okay.
- a surface of the spacer 151R that is different from the contact portion 151Rc is brought into contact with the driving side cartridge cover member 116, and the driving side cartridge cover member 116 holds the developing cover member 128 through (sandwiching) the spacer 151R.
- a configuration for positioning may also be used.
- FIGS. 26 and 27 are cross-sectional views in which a part of the developer cover member 128, a part of the drive-side cartridge cover member 116, and a part of the drive-side bearing 126 are partially omitted along the partial cross-section line CS, respectively, for the purpose of explanation. It is.
- the separation control member 196R in this embodiment is configured to be movable in the direction of arrow W41 in FIG. 26 from the home position.
- the separation control member 196R moves in the W41 direction
- the second force applying surface 196Rb and the first force receiving surface 152Rm of the first force receiving portion 152Rk of the moving member 152R come into contact with each other, and the moving member moves around the moving member swing axis HC. 152R rotates in the direction of arrow BA.
- the contact between the second force-applying surface 196Rb and the first force-receiving surface 152Rm does not necessarily have to be surface contact, and may be line contact or point contact.
- the second force applying surface 196Rb applies a separation force (retreating force) to the first force receiving surface 152Rm.
- the moving direction of the protrusion 152Rh when the moving member 152R rotates in the BA direction is referred to as a second direction.
- the developing frame pressing surface 152Rq of the movable member 152R contacts the first pressed surface 126c of the drive side bearing 126, so that the developing unit 109 rotates from the contact position in the direction of arrow V1 about the swing axis K.
- the pushed surface 152Rf of the moving member 152R has an arc shape, and the center of this arc is arranged to coincide with the swing axis K.
- the force that the pushed surface 152Rf of the moving member 152R receives from the cartridge cartridge pressing unit 191 is directed in the direction of the swing axis K. Therefore, it is possible to operate the developing unit 109 without hindering its rotation in the direction of the arrow V1.
- the spacer 151R In the spacer 151R, the regulated surface 151Rk of the spacer 151R and the spacer regulating surface 116d of the drive side cartridge cover member 116 are separated, and the spacer 151R is moved in the direction of arrow B1 (from the separation release position to the separation holding position) by the urging force of the tension spring 153. ). As a result, the spacer 151R rotates until the pressed surface 151Re contacts the spacer pressing surface 152Rr of the moving member 152R, and upon contact, moves to the separation holding position (first position).
- the spacer 151R is in contact with the contact surface 151Rc as shown in FIG. A gap T5 is formed between the surfaces 116c.
- the position shown in FIG. 27 where the developing unit 109 is rotated from the contact position toward the separation position and the spacer 151R can be moved to the separation holding position is referred to as the second position of the separation control member 196R.
- the separation control member 196R moves in the direction of arrow W42 and returns from the second position to the home position. Then, while the spacer 151R is maintained at the separated holding position, the developing unit 109 is rotated in the direction of arrow V2 by the driving torque received from the image forming apparatus main body 170 and the developing pressurizing spring 134, which will be described later, and is brought into contact with the abutting surface 151Rc. The contact surface 116c abuts. That is, the developing unit 109 is kept in a separated position by the spacer 151R, and the developing roller 106 and the photosensitive drum 104 are separated by the gap P1 (the state shown in FIGS. 24 and 1(a)).
- the spacer 151R prevents the developing unit 109 from moving to the contact position against the urging force in the direction of arrow V2 due to the driving torque received from the image forming apparatus main body 170 and the urging force of the developing pressure spring 134. , maintained in a spaced position. At this time, it can be said that the developing unit 109 is stably held at the separated position (retracted position) by the drum unit 108. Note that as a result, the above-described gaps T3 and T4 are formed again, and the separation control member 196R is located at a position where it does not act on the moving member 152R (the state shown in FIG. 24). Note that the transition from the state in FIG. 27 to the state in FIG. 24 is executed without any delay.
- the separation control member 196R moves from the home position to the second position, the spacer 151R moves from the separation release position to the separation holding position.
- the separation control member 196R returns from the second position to the home position, the developing unit 109 is maintained at the separation position by the spacer 151R.
- the separation force applied from the separation control member 196R is transmitted to the first pressed surface 126c of the drive-side bearing (a part of the developing frame) 126 via the moving member 152R, so that the developing unit 109 is moved from the contact position to the separation position (retreat position), and the spacer 151R is moved from the separation release position to the separation holding position.
- the position of the developing unit 109 relative to the drum unit 108 is biased in the V2 direction by the driving torque received from the image forming apparatus main body 170 and the developing pressure spring 134, as described above. It is determined that the supported portion 151Ra contacts the first support portion 128c and the contact portion 151Rc contacts the contact surface 116c. Therefore, the abutted surface 116c can be said to be a positioning portion (first positioning portion) that positions the developing unit 109 at the separated position (retracted position). At this time, it can be said that the developing unit 109 is stably held by the drum unit 108. Furthermore, it can be said that the spacer 151R in the separated holding position (first position) creates a situation in which the drum unit 108 can stably hold the developing unit 109 in the separated position (retracted position).
- FIG. 28(a) is a front view of the spacer 151L as viewed from the longitudinal direction of the drive side of the process cartridge 100
- FIGS. 28(b) and 28(c) are perspective views of the spacer 151L as a single item.
- the spacer 151L has an annular supported portion 151La, and has a separation holding portion (holding portion) 151Lb that protrudes from the supported portion 151La in the radial direction of the supported portion 151La.
- the distal end of the separation holding portion 151Lb has an arcuate contact surface (contact portion) 151Lc centered on the swing axis H of the spacer 151L.
- the swing axis H of the spacer 151L is the same as the swing axis H of the spacer 151R.
- the separation holding part (holding part) 151Lb is a part that connects the supported part 151La and the contact surface 151Lc, and has enough rigidity to maintain the separation position of the development unit 109 when it is sandwiched between the drum unit 108 and the development unit 109. are doing.
- the spacer 151L has a regulated surface (regulated portion) 151Lk adjacent to the contact surface 151Lc. Furthermore, the spacer 151L has a regulated part 151Ld that protrudes in the Z2 direction beyond the supported part 151La, and has an arc-shaped pressed part ( 151Le (part to be pressed upon contact).
- the spacer 151L has a main body portion 151Lf that is connected to the supported portion 151La, and the main body portion 151Lf has a spring hook portion 151Lg that projects in the direction of the swing axis H of the supported portion 151La. Further, the main body portion 151Lf has a rotation prevention portion 151m protruding in the Z2 direction, and a rotation prevention surface 151Ln is provided in a direction facing the pressed portion 151Le. [Detailed explanation of moving member L]
- FIG. 29(a) is a front view of the moving member 152L viewed from the longitudinal direction of the process cartridge 100
- FIGS. 29(b) and 29(c) are perspective views of the moving member 152L.
- the moving member 152L has an oblong supported portion 152La having an oblong shape.
- the longitudinal direction of the oblong shape of the oblong supported portion 152La is indicated by an arrow LH
- the upper direction thereof is indicated by an arrow LH1
- the lower direction thereof is indicated by an arrow LH2.
- the direction in which the oblong supported portion 152La is formed is defined as HD.
- the moving member 152L has a protruding portion (force receiving portion) 152Lh formed on the downstream side of the oblong supported portion 152La in the direction of arrow LH2. Note that the oblong supported portion 152La and the protruding portion 152Lh are connected by a main body portion 152Lb.
- the movable member 152L has a pushed part 152Le that protrudes in the arrow LH1 direction and in a direction substantially perpendicular to the arrow LH1 direction, and has an arcuate pushed face (moving force receiving part, operating force receiving part) on the downstream side in the arrow LH1 direction. part) 152Lf, and has a push-in restriction surface 152Lg on the upstream side. Furthermore, the moving member 152L has a first regulated surface (first regulated part) 152Lv, which is a part of the oblong supported part 152La and is located on the downstream side in the arrow LH2 direction.
- the protruding portion 152Lh has a first force receiving portion (retreat force receiving portion, separation force receiving portion) 152Lk and a second force receiving portion (receiving force receiving portion) 152Lk, which are disposed at the terminal end in the arrow LH2 direction and facing each other in a direction substantially orthogonal to the arrow LH2 direction.
- the first force receiving part 152Lk and the second force receiving part 152Ln are a first force receiving surface (retreat force receiving surface, separation force receiving surface) 152Lm and a second force receiving surface (contact force receiving surface) extending in the HD direction and having an arc shape.
- (receiving surface) has 152Lp.
- the protruding portion 152Lh has a spring hanging portion 152Ls that protrudes in the HB direction and a locking portion 152Lt, and the locking portion 152Lt has a locking surface 152Lu facing in the same direction as the second force receiving surface 152Lp.
- the moving member 152L is a part of the main body 152Lb, is disposed upstream of the second force receiving part 152Ln in the direction of arrow LH2, and faces the same direction as the second force receiving surface 152Lp (developing frame pressing surface). It has 152Lq (pressing part, pressing part during separation).
- the moving member 152L is a part of the main body 152Lb and is disposed upstream of the first force receiving part 152Lk in the direction of arrow LH2, and has a spacer pressing surface (spacer pressing part) facing in the same direction as the first force receiving surface 152Lm. , a pressing part at the time of contact) 152Lr.
- the LH1 direction is substantially the same direction as the Z1 direction
- the LH2 direction is substantially the same direction as the Z2 direction
- the HB direction is substantially the same as the longitudinal direction of the process cartridge 100.
- FIG. 30 is a perspective view of the process cartridge 100 after the spacer 151L is assembled, viewed from the drive side.
- the developing unit 109 rotates relative to the photosensitive drum 104 about the swing axis K by fitting the outer diameter portion of the cylindrical portion 127a into the developing unit support hole 117a. Possibly supported.
- the non-drive side bearing 127 has a cylindrical first support portion 127b and a second support portion 127e that protrude in the direction of the swing axis K.
- the outer diameter of the first support portion 127b fits into the inner diameter of the supported portion 151La of the spacer 151L, and rotatably supports the spacer 151L.
- the center of swing of the spacer 151L assembled to the non-drive side bearing 127 is the swing axis H.
- the non-drive side bearing 127 has a first retaining portion 127c that projects in the direction of the swing axis H. As shown in FIG. 16, movement of the spacer 151L assembled to the non-drive side bearing 127 in the direction of the swing axis H is restricted by the first retaining portion 127c coming into contact with the spacer 151L.
- the outer diameter of the second support portion 127e fits into the inner wall of the oblong supported portion 152La of the moving member 152L, and supports the moving member 152L rotatably and movably in the oblong direction.
- the center of swing of the movable member 152L assembled to the non-drive side bearing 127 is defined as the movable member swing axis HC.
- movement of the movable member 152L assembled to the non-drive side bearing 127 in the direction of the movable member swing axis HE is restricted by the second retaining portion 127f coming into contact with the spacer 151L.
- FIG. 31 is a view of the process cartridge 100 after the spacer 151L has been assembled, viewed from the direction of the development unit swing axis H.
- a part of the non-drive side cartridge cover member 117 is partially omitted along the partial cross-section line CS so that the fitting part between the oblong supported portion 151La of the moving member 152L and the cylindrical portion 127e of the non-drive side bearing 127 can be seen.
- FIG. 31 is a view of the process cartridge 100 after the spacer 151L has been assembled, viewed from the direction of the development unit swing axis H.
- a part of the non-drive side cartridge cover member 117 is partially omitted along the partial cross-section line CS so that the fitting part between the oblong supported portion 151La of the moving member 152L and the cylindrical portion 127e of the non-drive side bearing 127 can be seen.
- the separation and abutment mechanism 150L includes a spacer part urging part (holding part urging part) that urges the spacer 151L to rotate in the direction of arrow B1 about the swing axis H, and the moving member 152L is
- a tension spring 153 is provided as a biasing member (holding part biasing member) including a force receiving part biasing part (projection part biasing part) that biases in the B3 direction.
- the tension spring 153 is a coil spring and is an elastic member.
- the arrow B3 direction is a direction substantially parallel to the oblong longitudinal direction LH2 direction (see FIG. 29) of the oblong supported portion 152La of the movable member 152L.
- the tension spring 153 is engaged with and connected to a spring hook 151Lg provided on the spacer 151L and a spring hook 152Ls provided on the moving member 152L, and is assembled between them.
- the tension spring 153 applies a force to the spring hanging portion 151Lg of the spacer 151L in the direction of the arrow F2 in FIG. 31, thereby applying a biasing force to rotate the spacer 151L in the direction of the arrow B1.
- the tension spring 153 applies a force to the spring hook 152Ls of the moving member 152L in the direction of arrow F1, thereby providing a biasing force that moves the moving member 152L in the direction of arrow B3 (direction toward the storage position (reference position, standby position)). is giving.
- a line GS connects the spring hook 151Lg of the spacer 151L and a spring hook 152Ls of the force holding member 152L
- a line HS connects the spring hook 152Ls of the moving member 152L and the moving member swing axis HE.
- the angle ⁇ 3 formed by the line GS and the line HS is set so as to satisfy the following equation (3), with the counterclockwise direction around the spring hanging portion 152Ls of the moving member 152L being positive.
- the moving member 152L is urged to rotate in the direction BA in the figure with the moving member swing axis HE as the center of rotation. 0° ⁇ 3 ⁇ 90°...(3)
- the mounting positions of the spacer 151L and the moving member 152L are as shown in FIG. 151L and a moving member 152L are arranged. However, the positions are not limited to this, and they may be placed on the developing container 125 side (inside in the longitudinal direction) of the non-drive side bearing 127, or the spacer 151L and the moving member 152L are placed on both sides of the non-drive side bearing 127. You may also place Furthermore, the arrangement order of the spacer 151L and the moving member 152L may be reversed.
- the non-drive side bearing 127 forms the developing unit 109 by being fixed to the developing container 125.
- the fixing method in this embodiment is to use a fixing screw 145 and an adhesive (not shown) as shown in FIG. 16, but the fixing method is not limited to this, and bonding such as welding by heating or pouring resin and hardening is also possible. It may be a method.
- FIGS. 32A and 32B are enlarged cross-sectional views of the movable member swing axis HE of the movable member 152L and the vicinity of the separation holding portion 151L in FIG. 31, respectively, for explanation. Further, FIGS. 32A and 32B are cross-sectional views in which a portion of the non-drive side cartridge cover member 117, the tension spring 153, and the spacer 151L are partially omitted along the partial cross-section line CS.
- the first regulated surface 152Lv of the movable member 152L contacts the second support portion 127e of the non-drive side bearing 127 due to the biasing force of the above-mentioned tension spring 153 in the direction of arrow F1.
- the developing frame pressing surface 152Lq of the moving member 152L contacts the pressed surface 127h of the non-drive side bearing 127 and is positioned.
- This position is referred to as the storage position of the moving member 152L.
- the storage position can also be referred to as a reference position or a standby position.
- the spacer 151L is rotated in the direction of arrow B4 around the swing axis H by the urging force of the tension spring 153 in the direction of arrow F2, and is positioned by the contact surface 151Lp of the spacer 151L coming into contact with the spacer pressing surface 152Lr of the moving member 152L. Ru.
- This position is referred to as the separation holding position (regulating position) of the spacer 151L. Note that when the movable member 152L moves to the protruding position described later, the pressed portion 151Le of the spacer 151L comes into contact with the spacer pressing surface 152Lr of the movable member 152L, so that it can be located at the separation holding position.
- FIG. 33 is an enlarged view of the area around the spacing holding portion 151L in FIG. 31 for explanation, and the tension spring 153 is omitted.
- the process cartridge 100 having the separation and contact mechanism 150L is dropped in the direction of the arrow JA in FIG. 33 during transportation.
- the spacer 151L receives a force that causes it to rotate in the direction of arrow B2 around the separation holding swing axis H due to its own weight.
- the tension spring 153 is used as a biasing means for biasing the spacer 151L to the separated holding position and the moving member 152L to the storage position, but the biasing means is not limited to this.
- a torsion coil spring, a leaf spring, or the like may be used as a biasing means to bias the moving member 152L to the storage position and the spacer 151L to the spaced-apart position.
- the material of the biasing means may be metal, mold, or the like, as long as it has elasticity and can bias the spacer 151L and the moving member 152L.
- the developing unit 109 equipped with the separating and contacting mechanism 150L is integrally coupled to the drum unit 108 by the non-drive side cartridge cover member 117 as described above (state in FIG. 30).
- the non-drive side cartridge cover member 117 of this embodiment has an abutted surface (abutted portion) 117c.
- the abutted surface 117c is a surface substantially parallel to the swing axis K.
- the abutted surface 117c comes into contact with the spacer 151L located at the separation holding position when the non-drive side cartridge cover member 117 is assembled to the developing unit 109 and the drum unit 108. It faces the surface 151Lc.
- the process cartridge 100 includes a developing unit urging member (with a second unit) that urges the developing unit 109 from the separated position to the contact position and brings the developing roller 106 into contact with the photosensitive drum 104.
- a developing pressure spring 134 is provided as a biasing member.
- the development pressure spring 134 is a coil spring assembled between the spring hook 117e of the non-drive side cartridge cover member 117 and the spring hook 127k of the non-drive side bearing 127, and is an elastic member.
- the contact surface 151Lc of the spacer 151L and the contact surface 117c of the non-drive side cartridge cover member 117 are brought into contact by the biasing force of the developing pressure spring 134.
- the attitude of the developing unit 109 is determined such that a gap P1 is separated between the developing roller 106 and the photosensitive drum 104 of the developing unit 109. It is composed of The state in which the developing roller 106 is separated from the photosensitive drum 104 by the gap P1 by the spacer 151L is referred to as a separated position (retracted position) of the developing unit 109 (see FIG. 35(a)). [Separated state and contact state of process cartridge 100 (non-driving side)]
- FIG. 34 is a side view of the process cartridge 100 installed inside the image forming apparatus main body 170 when viewed from the non-driving side.
- FIG. 34A shows a state in which the developing unit 109 is separated from the photosensitive drum 104.
- FIG. 34(b) shows a state in which the developing unit 109 is in contact with the photosensitive drum 104.
- the spacer 151L is located at the separated holding position (first position) and the developing unit 109 is located at the separated position (retracted position)
- the supported part 151La which is one end of the separation holding part 151Lb
- the contact part 151Lc which is the other end
- the non-driving side cartridge cover member 117 It is in contact with the contact surface 117c.
- the first support portion 127b is pressed toward the supported portion 151La by the action of the development pressure spring 134, and the contact portion 151Lc is pressed toward the contact surface 117c.
- the non-drive side cartridge cover member 117 (forming part of the drum unit 108) is attached to the non-drive side bearing 127 (forming a part of the developing unit 109) via the spacer holding portion 151Lb of the spacer 151L. ) is positioned and stably held.
- the pushed portion 152Le of the moving member 152L is pushed in the direction of arrow ZA.
- the ZA direction is a direction that intersects (orthogonally in this embodiment) the rotational axis M2 of the developing roller 106, the rotational axis M1 of the photosensitive drum 108, and the swing axis HE. Therefore, the protrusion 152Lh in the protrusion position is located downstream in the ZA direction than the protrusion 152Lh in the standby position.
- the protrusion 152Lh in the protrusion position is located further from the swing axis K than the protrusion 152Lh in the standby position. Further, the protruding portion 152Lh in the protruding position protrudes in the ZA direction (disposed downstream in the ZA direction) than the drum frame and the developing frame.
- the drum frame includes a first drum frame 115, a driving side cartridge cover member 116, and a non-driving side cartridge cover member 117
- the developing frame includes a developer container 125, a driving side bearing 126, and a non-drive side bearing 127.
- the protruding position can also be referred to as a force receiving position or an operating position.
- the moving member 152L is movable in the ZA direction and the opposite direction while maintaining the spacer 151L at the separated holding position (first position). Therefore, even when the movable member 152L and the protrusion 152Lh are in the operating position, the spacer 151L is located in the separation holding position (first position). The pressed portion 151Le of the spacer 151L is brought into contact with the spacer pressing surface 152Lr of the moving member 152L by the tension spring 153 as described above.
- the moving member 152L rotates in the direction of arrow BD around the moving member swing axis HE, and the spacer pressing surface 152Lr is By pressing the pressing portion 151Le, the spacer 151L is rotated in the direction of arrow B5.
- the spacer 151L rotates in the direction of arrow B5
- the abutting surface 151Lc separates from the abutted surface 117c
- the developing unit 109 becomes rotatable in the direction of arrow V2 about the swing axis K from the separated position.
- the developing unit 109 rotates in the V2 direction from the separated position, and the developing roller 106 of the developing unit 109 comes into contact with the photosensitive drum 104.
- the position of the developing unit 109 where the developing roller 106 and the photosensitive drum 104 are in contact is referred to as a contact position (developing position) (the state shown in FIG. 34(b)).
- a separation release position permissible position, second position.
- the regulating surface 151Lk of the spacer 151L comes into contact with the spacer regulating surface (spacer portion regulating portion) 117d of the drive-side cartridge cover 116, so that the spacer 151L is maintained at the release position.
- the non-drive side bearing 127 of this embodiment has a pressed surface (pressed portion during separation) 127h that is a surface orthogonal to the swing axis K.
- the non-drive side bearing 127 is fixed to the developing unit 109. Therefore, when the first force receiving portion 152Lk (first force receiving surface 152Lm) of the moving member 152L is pressed in the direction of arrow 41 while the developing unit 109 is in the contact position, the developing frame pressing surface 152Lq becomes the pressed surface. It comes into contact with 127h. As a result, the developing unit 109 rotates about the swing axis K in the direction of the arrow V1 and moves to the separated position (the state shown in FIG. 34(a)).
- the direction in which the pressed surface 127h moves is indicated by an arrow W41 in FIGS. 34(a) and 34(b). Further, the direction opposite to the arrow W41 is an arrow W42, and the arrow W41 and the arrow W42 are substantially horizontal directions (X1, X2 directions). As described above, the second force receiving surface 152Lp of the movable member 152L assembled to the developing unit 109 is located upstream of the pressed surface 127h of the non-drive side bearing 127 in the direction of arrow W41.
- the pressed surface 127h and the pressed portion 151Le of the spacer 151L are arranged at a position where at least a portion thereof overlaps in the W1 and W2 directions.
- the operation of the separation and contact mechanism 150L within the image forming apparatus main body 170 will be described next. [Attachment of process cartridge 100 to image forming apparatus main body 170 (non-drive side)]
- FIGS. 35 and 36 the relationship between the separation and abutment mechanism 150L of the process cartridge 100 and the developing separation control unit 196L of the image forming apparatus main body 170 when the process cartridge 100 is installed in the image forming apparatus main body 170 will be explained.
- the combined action will be explained.
- FIGS. 35 and 36 are cross-sectional views in which a part of the developing cover member 128 and a part of the non-drive side cartridge cover member 117 are partially omitted along the partial cross-sectional line CS, respectively, for the purpose of explanation.
- FIG. 35 is a view of the process cartridge 100 seen from the driving side when the process cartridge 100 is mounted on a cartridge tray 171 (not shown) of the image forming apparatus M and the cartridge tray 171 is inserted into the first mounting position.
- components other than the process cartridge 100, cartridge pressing unit 190, and separation control member 196L are omitted.
- the image forming apparatus main body 170 of this embodiment includes the separation control member 196L corresponding to each process cartridge 100 as described above.
- the separation control member 196L is disposed closer to the lower surface of the image forming apparatus main body 170 than the spacer 151L when the process cartridge 100 is located at the first inner position and the second inner position.
- the separation control member 196L protrudes toward the process cartridge 100 and has a first force applying surface (force applying section) 196La and a second force applying surface (retreating force applying section) 196Lb that face each other via a space 196Rd.
- the first force applying surface 196Ra and the second force applying surface 196Rb are connected to each other via a connecting portion 196Rc on the lower surface side of the image forming apparatus main body 170.
- the separation control member 196R is rotatably supported by a control sheet metal 197 about a rotation center 196Re.
- the spacing member 196R is always biased in the E1 direction by a biasing spring.
- the control sheet metal 197 is configured to be movable in the W41 and W42 directions by a control mechanism (not shown), so that the separation control member 196R is configured to be movable in the W41 and W42 directions.
- the cartridge pressing unit 190 descends in the direction of arrow ZA, and the first force applying portion 190a moves toward the moving member 152L. It comes into contact with the pushed surface 152Lf. Thereafter, when the cartridge pressing unit 190 descends to a predetermined position, which is the second mounting position, the protruding portion 152Lh of the moving member 152L moves to the protruding position in which the process cartridge 100 protrudes downward in the Z2 direction (state in FIG. 36). When this operation is completed, as shown in FIG.
- a gap T4 is created between the first force applying surface 196La of the separation control member 196L and the second force receiving surface 152Lp of the moving member 152L, and a gap T4 is created between the second force applying surface 196Lb and the second force applying surface 196Lb.
- a gap T3 is formed between the force receiving surface 152Lm and the force receiving surface 152Lm.
- the second force receiving surface 152Lp of the moving member 152L and the first force applying surface 196La of the separation control member 196L are arranged so as to partially overlap in the W1 and W2 directions.
- the first force receiving surface 152Lm of the moving member 152L and the second force applying surface 196Lb of the separation control member 196L are arranged so as to partially overlap in the W1 and W2 directions.
- FIG. 36 a part of the developing cover member 128, a part of the non-drive side cartridge cover member 117, and a part of the non-drive side bearing 127 are partially omitted along the partial cross-sectional line CS.
- FIG. 36 a part of the developing cover member 128, a part of the non-drive side cartridge cover member 117, and a part of the non-drive side bearing 127 are partially omitted along the partial cross-sectional line CS.
- the developing coupling 32 receives a driving force from the image forming apparatus main body 170 in the direction of arrow V2 in FIG. 24, and the developing roller 106 rotates. That is, the developing unit 109 having the developing coupling 32 receives a driving torque in the direction of the arrow V2 about the swing axis K from the image forming apparatus main body 170. Furthermore, the developing unit 109 also receives a biasing force in the direction of arrow V2 due to the biasing force of the developer pressure spring 134 described above. As shown in FIG. 36, a state in which the developing unit 109 is in the separated position and the spacer 151L is in the separated holding position (first position) will be described.
- the separation control member 196L of this embodiment is configured to be movable in the direction of arrow W41 in FIG. 36 from the home position.
- the separation control member 196L moves in the W41 direction
- the first force applying surface 196La of the separation control member 196L and the second force receiving surface 152Lp of the second force receiving portion 152Ln of the moving member 152L come into contact, and the moving member 152L becomes the moving member. It rotates in the BD direction with the swing axis HD as the rotation center.
- the contact between the first force applying surface 196La and the second force receiving surface 152Lp does not necessarily have to be surface contact, and may be line contact or point contact.
- the first force applying surface 196La applies a contact force to the second force receiving surface 152Lp by moving in the W41 direction.
- the moving direction of the protrusion 152Lh when the moving member 152L rotates in the BD direction is referred to as a first direction.
- the spacer pressing surface 152Lr of the moving member 152L contacts the pressed portion 151Le of the spacer 151L, and the spacer 151L is rotated in the B5 direction.
- the spacer 151L is then rotated by the moving member 152L to a separation release position (second position) where the contact surface 151Lc and the contact surface 117c are separated.
- the position of the separation control member 196L shown in FIG. 37 that moves the spacer 151L to the separation release position (second position) is referred to as a first position.
- the spacer 151L When the spacer 151L is moved to the separation release position by the separation control member 196L in this manner, the development unit 109 is rotated in the V2 direction by the driving torque received from the image forming apparatus main body 170 and the biasing force of the development pressure spring 134. As a result, the developing unit 109 moves to the abutting position where the developing roller 106 and the photosensitive drum 104 abut (the state shown in FIG. 37). At this time, the spacer 151L, which is biased in the direction of arrow B4 by the tension spring 153, is brought into the separation release position (second position) by the regulated surface 151Lk coming into contact with the spacer regulating surface 117d of the non-drive side cartridge cover member 117. maintained.
- the separation control member 196L moves in the W42 direction and returns to the home position.
- the movable member 152L is rotated in the BC direction by the tension spring 153, and shifts to a state where the developing frame pressing surface 152Lq of the movable member 152L and the pressed surface 127h of the non-drive side bearing 127 are in contact (as shown in FIG. 38). situation).
- the moving member 152L and the protrusion 152Lh are in the operating position.
- the separation control member 196L is located at a position where it does not act on the moving member 152L. Note that the transition from the state shown in FIG. 37 to the state shown in FIG. 38 is performed immediately. Note that the position of the separation control member 196L in FIG. 38 is the same as in the state in FIG. 36.
- the second force receiving surface 152Lp receives the contact force from the first force applying surface 196La.
- the contact force is a force applied from the first force application surface 196La that moves in the W41 direction, and is a force applied in a direction (contact direction, proximity direction, This is the force applied to the process cartridge 100 to move it in the V2 direction). Therefore, it is sufficient that the developing unit 109 is configured to move from the retracted position toward the developing position upon receiving the contact force, and the process cartridge 100 is moved by the contact force until the developing unit 109 reaches the developing position. There is no need to continue receiving it. Further, as described above, when the developing unit 109 moves from the retracted position to the developing position in response to the contact force, the developing roller 106 and the photosensitive drum 104 do not necessarily need to be in contact with each other at the developing position.
- the separation control member 196L moves from the home position to the first position, thereby applying a contact force to the moving member 152L, rotating the moving member 152L, and moving the spacer 151L to the separation holding position. (first position) to a separation release position (second position).
- This allows the developing unit 109 to move from the separated position to the abutting position where the developing roller 9 and the photosensitive drum 104 abut.
- the contact force applied from the separation control member 196L is transmitted to the spacer 151L via the moving member 152L, thereby moving the developing unit 109 from the separation position (retracted position) to the contact position (development position). It can be said that it does.
- the photosensitive drum 104 can be said to be a positioning section (second positioning section) that positions the developing roller 6 of the developing unit 109 at the developing position. At this time, it can be said that the developing unit 109 is stably held by the drum unit 108. At this time, the spacer 151L at the separation release position is not directly involved in positioning the developing unit 109. However, by moving the spacer 151L from the separation holding position to the separation release position, it can be said that the spacer 151L creates a situation in which the drum unit 108 can stably hold the developing unit 109 at the contact position (development position).
- FIG. 39 is a cross-sectional view in which a part of the developing cover member 128, a part of the non-drive side cartridge cover member 117, and a part of the non-drive side bearing 127 are partially omitted along the partial cross-section line CS. It is a diagram.
- the separation control member 196L in this embodiment is configured to be movable in the direction of arrow W42 in FIG. 38 from the home position.
- the separation control member 196L moves in the W42 direction
- the second force applying surface 196Lb and the first force receiving surface 152Lm of the first force receiving portion 152Lk of the moving member 152L come into contact with each other, and the moving member moves around the moving member swing axis HD.
- 152L rotates in the direction of arrow BC.
- the contact between the second force-applying surface 196Lb and the first force-receiving surface 152Lm does not necessarily have to be surface contact, and may be line contact or point contact.
- the second force applying surface 196Lb applies a separation force (retreat force) to the first force receiving surface 152Lm.
- the moving direction of the protrusion 152Lh when the moving member 152L rotates in the BC direction is referred to as a second direction. Since the developing frame pressing surface 152Lq of the movable member 152L is in contact with the pressed surface 127h of the non-drive side bearing 127, the developing unit 109 rotates from the contact position in the direction of arrow V1 about the pivot axis K. (Situation in Figure 39). At this time, the pushed surface 152Lf of the moving member 152L has an arc shape, and the center of this arc is arranged to coincide with the swing axis K.
- the spacer 151L In the spacer 151L, the regulated surface 151Lk of the spacer 151L and the spacer regulating surface 117d of the non-drive side cartridge cover member 117 are separated, and the spacer 151L moves in the direction of arrow B4 (from the separation release position to the separation holding position) by the urging force of the tension spring 153. direction). As a result, the spacer 151L rotates until the pressed portion 151Le comes into contact with the spacer pressing surface 152LR of the moving member 152L, and upon contact, the spacer 151L moves to the separation holding position (first position).
- the developing unit 109 When the developing unit 109 is moved from the contact position to the separation position by the separation control member 196L and the spacer 151L is located at the separation holding position, there is a gap between the contact surface 151Lc and the abutted surface 117c as shown in FIG. A gap T5 is formed.
- the position where the developing unit 109 is rotated from the contact position toward the separation position and the spacer 151L can move to the separation holding position is referred to as the second position of the separation control member 196L.
- the separation control member 196L moves in the direction of arrow W41 and returns from the second position to the home position. Then, the developing unit 109 rotates in the direction of arrow V2 due to the driving torque received from the image forming apparatus main body 170 and the biasing force of the developing pressurizing spring 134, while the spacer 151L is maintained in the separated holding position, and the developing unit 109 rotates in the direction of arrow V2, and contacts the abutting surface 151Lc.
- the contact surface 117c makes contact. That is, the developing unit 109 is kept in a separated position by the spacer 151L, and the developing roller 106 and the photosensitive drum 104 are separated by the gap P1 (the state shown in FIGS. 36 and 34(a)).
- the first force receiving surface 152Lm receives a separation force (retreating force) from the second force applying surface 196Lb.
- the separation force is a force applied from the second force applying surface 196Lb that moves in the W42 direction, and is used to move the developing roller 106 in the direction away from the photosensitive drum 104 (separation direction, retreat direction, or V1 direction). This is the force applied to the process cartridge 100.
- the developing unit 109 is configured to move from the developing position to the retracted position upon receiving the separating force, and the process cartridge 100 is moved by the separating force until the developing unit 109 reaches the retracted position. There is no need to continue receiving it.
- the spacer 151L moves from the separation release position to the separation holding position.
- the separation control member 196L returns from the second position to the home position, the developing unit 109 is maintained at the separation position by the spacer 151L.
- the spacer 151L prevents the developing unit 109 from moving to the contact position against the urging force in the direction of arrow V2 due to the driving torque received from the image forming apparatus main body 170 and the urging force of the developing pressure spring 134. , maintained in a spaced position.
- the separation force applied from the separation control member 196L is transmitted to the pressed surface 127h of the non-drive side bearing (part of the developing frame) 127 via the moving member 152L, thereby controlling the developing unit 109.
- the spacer 151R is moved from the contact position to the separation position (retreat position), and the spacer 151R is moved from the separation release position to the separation holding position.
- the position of the developing unit 109 relative to the drum unit 108 is biased in the V2 direction by the driving torque received from the image forming apparatus main body 170 and the developing pressure spring 134, as described above. It is determined that the supported portion 151La contacts the first support portion 127b and the contact portion 151Lc contacts the contact surface 117c. Therefore, the contact surface 117c can be said to be a positioning part (first positioning part) for positioning the developing unit 109 in the separated position (retracted position) from the photosensitive drum 104. At this time, it can be said that the developing unit 109 is stably held by the drum unit 108. Furthermore, it can be said that the spacer 151L in the separated holding position (first position) creates a situation in which the drum unit 108 can stably hold the developing unit 109 in the separated position (retracted position).
- the first force applying portion 190a rises in the opposite direction of the arrow ZA direction.
- the movable member 152L is moved in the opposite direction of the arrow ZA direction by the action of the biasing member 153.
- the spacer 151L remains in its separated position, and the developing unit 109 also remains in its separated position.
- the timing at which the spacer 151R located on the driving side is located at the separation holding position and the timing at which the spacer 151L located at the non-driving side is located at the separation holding position are approximately the same. Further, the timing at which the spacer 151R is located at the separation release position and the timing at which the spacer 151L is located at the separation release position are substantially the same. Note that these timings may be different between the drive side and the non-drive side, but in order to shorten the time from when the user starts a print job until the printed matter is ejected, it is recommended that It is desirable that the positions be located at the same time.
- the swing axes H of the spacer 151R and the spacer 151L are coaxial, but the timing is not limited to this, as long as they are located at the separation release position at approximately the same time as described above.
- the movable member swing axis HC of the movable member 152R and the movable member swing axis HE of the movable member 152L are axes that do not coincide, but it is sufficient if the timings at which they are located at the separation release position are approximately the same as described above. , but is not limited to this.
- the width of the protrusion 152Rh of the moving member 152R or the distance between the first force receiving surface 152Rm and the first force receiving surface 152Rp in the W41 direction or the W42 direction is as follows. It is preferably 10 mm or less, more preferably 6 mm or less. With such a dimensional relationship, it becomes possible to perform appropriate abutting and separating operations. The same applies to the non-drive side moving member 152L.
- the driving side and the non-driving side have similar separating and contacting mechanisms 150R and 150L, which operate almost simultaneously. Therefore, even if the process cartridge 100 is twisted or deformed in the longitudinal direction, the amount of separation between the photosensitive drum 104 and the developing roller 9 can be controlled at both ends in the longitudinal direction. Therefore, variations in the amount of separation in the longitudinal direction can be suppressed.
- the developing roller 106 and the photosensitive The contact state and separation state of the drum 104 can be controlled. Therefore, the developing roller 106 can be brought into contact with the photosensitive drum 104 only when forming an image, and the developing roller 4 can be kept separated from the photosensitive drum 104 when not forming an image. Therefore, even if the image forming apparatus is left for a long period of time without image formation, the developing roller 106 and the photosensitive drum 104 will not be deformed, and stable image formation can be performed.
- the moving member 152R (152L) that acts on the spacer 151R (151L) to rotate it can be positioned at the storage position by the biasing force of the tension spring 153 or the like. Therefore, when the process cartridge 100 exists outside the image forming apparatus main body 170, it does not protrude from the outermost shape of the process cartridge 100, and the process cartridge 100 can be miniaturized as a single unit.
- the moving member 152R (152L) can be positioned at the storage position by the urging force of the tension spring 153 or the like. Therefore, when installing the process cartridge 100 into the image forming apparatus main body 170, the installation can be completed by moving the process cartridge 100 in only one direction. Therefore, it is not necessary to move the process cartridge 100 (tray 171) in the vertical direction. Therefore, no extra space is required in the image forming apparatus main body 170, and the main body can be made smaller.
- the separation control member 196R (196L) when the separation control member 196R (196L) is located at the home position, no load is applied to the separation control member 196R (196L) from the process cartridge 100. Therefore, the rigidity required for the separation control member 196R (196L) and the mechanism for operating the separation control member 196R (196L) can be reduced, and the size can be reduced. Furthermore, since the load on the sliding portion of the mechanism for operating the separation control member 196R (196L) is reduced, wear of the sliding portion and generation of abnormal noise can be suppressed.
- the developing unit 109 can be maintained at a separated position only by the spacer 151R (151L) included in the process cartridge 100. Therefore, by reducing the number of parts that cause variations in the amount of separation between the developing roller 106 and the photosensitive drum 104, component tolerances can be reduced and the amount of separation can be minimized. Since the amount of separation can be reduced, when the process cartridge 100 is placed in the image forming apparatus main body 170, the area in which the developing unit 109 exists when the developing unit 109 moves to the contact position and the separated position becomes smaller, thereby improving the image quality. It is possible to downsize the forming device. In addition, since the space of the developer accommodating portion 29 of the developing unit 109 that moves to the contact position and the separated position can be increased, it is possible to arrange a compact and large-capacity process cartridge 100 in the image forming apparatus main body 170. can.
- the moving member 152R (152L) is located at the storage position when the process cartridge 100 is installed, and the developing unit 109 can be maintained at the separated position by the spacer 151R (151L) included in the process cartridge 100. . Therefore, when installing the process cartridge 100 into the image forming apparatus main body 170, the installation can be completed by moving the process cartridge 100 in only one direction. Therefore, it is not necessary to move the process cartridge 100 (tray 171) in the vertical direction. Therefore, no extra space is required in the image forming apparatus main body 170, and the main body can be made smaller.
- the amount of separation can be reduced, when the process cartridge 100 is disposed within the image forming apparatus main body 170, the area where the developing unit 109 exists when the developing unit 109 moves to the contact position and the separated position becomes smaller. This makes it possible to downsize the image forming apparatus.
- the space of the developer accommodating portion 29 of the developing unit 109 that moves to the contact position and the separated position can be increased, it is possible to arrange a compact and large-capacity process cartridge 100 in the image forming apparatus main body 170. can.
- the developing unit 109 is moved in the direction of arrow V2 (direction of movement from the separation position to the developing position) by the driving torque of the developing coupling portion 132a received from the image forming apparatus main body 170 and the biasing force of the developing pressure spring 134.
- the configuration was such that it biased against
- the structure may be such that the gravity applied to the developing unit 109 generates a moment that rotates the developing unit 109 in the V2 direction.
- the biasing configuration using the developer pressure spring 134 may not be provided, or may be used in combination with the biasing configuration using the developer pressure spring 134.
- FIG. 40 is an enlarged view of the area around the spacer 151R when the process cartridge 100 is viewed from the drive side along the swing axis K of the developing unit 109 (photosensitive drum axis direction). Additionally, for the sake of explanation, it is a cross-sectional view in which a part of the developing cover member 128 and a part of the drive-side cartridge cover member 116 are partially omitted along a partial cross-sectional line CS.
- FIG. 40 is an enlarged view of the area around the spacer 151R when the process cartridge 100 is viewed from the drive side along the swing axis K of the developing unit 109 (photosensitive drum axis direction). Additionally, for the sake of explanation, it is a cross-sectional view in which a part of the developing cover member 128 and a part of the drive-side cartridge cover member 116 are partially omitted along a partial cross-sectional line CS.
- FIG. 41 is an enlarged view of the area around the spacer 151R when the process cartridge 100 is viewed from the non-driving side along the swing axis K (photosensitive drum axis direction) of the developing unit 109. Additionally, for the sake of explanation, it is a cross-sectional view in which a part of the developing cover member 128 and a part of the drive-side cartridge cover member 116 are partially omitted along a partial cross-sectional line CS.
- the driving side and the non-driving side there is no distinction between the driving side and the non-driving side, except for the parts explained in detail later, and since they are common to both, the explanation will be based on the driving side (Fig. 40). Although the description of the non-drive side (FIG. 41) will be omitted, the non-drive side also has a similar configuration.
- a line N is a straight line passing through the rotational axis M1 of the photosensitive drum 104 (point M1 in FIG. 40) and the rotational axis M2 of the developing roller 106 (point M2 in FIG. 40).
- the contact area between the contact surface 151Rc of the spacer 151R and the contact surface 116c of the drive side cartridge cover member 116 is M3, and the contact area between the pressed surface 151Re of the spacer 151R and the spacer pressing surface 152Rr of the moving member 152R.
- the distance between the swing axis K of the developing unit 109 and the point M2 is defined as a distance e1
- the distance between the swing axis K and the region M3 is defined as a distance e2
- the distance between the swing axis K and the point M4 is defined as a distance e3. do.
- the developing unit 109 when the developing unit 109 is in the separated position and the moving member 152R (152L) is in the protruding position, the developing unit 109 is viewed along the swing axis K (or the rotation axis M1 or the rotation axis M2). and have the following positional relationship.
- the swing axis K when viewed along the swing axis K as shown in FIG. It is arranged in the area AD1 on the opposite side to the area AU1 in which the . That is, the contact surface 151Rc of the spacer 151R is arranged such that the distance e2 is longer than the distance e1. Further, as shown in FIG.
- the attitude of the process cartridge 100 is the same as the attitude when it is attached to the image forming apparatus main body 170.
- This attitude can also be said to be an attitude in which the rotational axis M1 of the photosensitive drum 104 is horizontal and the photosensitive drum 104 is disposed at the lower part of the process cartridge 100.
- the area AD1 corresponds to the lower part of the process cartridge 100, and is also an area including the bottom of the process cartridge 100.
- the spacer 151R and the contact surface 151Rc in this manner, even when the position of the contact surface 151Rc varies due to component tolerances, it is possible to suppress variations in the posture of the developing unit 109 at the separated position. In other words, it is possible to minimize the influence of variations in the contact surface 151Rc on the separation amount (gap) P1 (see FIG. 1(a)) between the developing roller 106 and the photosensitive drum 104, and to accurately align the developing roller 106 with the photosensitive drum 104.
- the photosensitive drum 104 can be separated. Furthermore, there is no need to provide an extra space for the developing unit 109 to retreat when the developing unit 109 is separated, leading to a reduction in the size of the image forming apparatus main body 170.
- first force receiving portion 152Rk (152Lk) and the second force receiving portion 152Rn (152Ln), which are the force receiving portions of the moving member 152R (152L), are connected to the center of rotation (rotational axis) of the developing coupling portion 132a with the line N in between. ) is located on the opposite side from K. That is, at least a portion of each of the force receiving portions 152Rk (152Lk) and 152Rn (152Ln) is arranged in the area AD1 opposite to the area AU1 where the rotation center (rotation axis) K of the developing coupling 132a is arranged. ing.
- the protruding portion (force receiving portion) 152Rh (152Lh) is arranged at the longitudinal end. Furthermore, as shown in FIG. 15 (FIG. 16), a cylindrical portion 128b (127a), which is a support portion of the developing unit 109, is arranged at the longitudinal end portion. Therefore, the force receiving part 152Rh (152Lh) including the first force receiving part 152Rk (152Lk) and the second force receiving part 152Rn (152Ln) is the cylindrical part 128b (127a) of the developing unit 109 (that is, the swing axis K). By arranging it at a position opposite to the line N, the functional section can be efficiently arranged.
- the process cartridge 100 and the image forming apparatus M can be made smaller. More specifically, when viewed from the direction along the rotational axis M2 and dividing the boundary by the straight line N, the developing unit 109 such as the cylindrical portion 128b (127a) is located in the area AU1 where the swing axis K is arranged. A structure for movably supporting the drum unit 108 is arranged. For this reason, at least a portion of each of the force receiving portions 152Rk (152Lk) and 152Rn (152Ln) is arranged in an area AD1 where the developer coupling portion 132a is not arranged than in the area AU1 where the swing axis K is arranged. This allows for a more efficient layout that avoids interference between members. This leads to miniaturization of the process cartridge 100 and the image forming apparatus M.
- the force receiving portion 152Rh (152Lh) is arranged at the drive side end in the longitudinal direction.
- a development drive input gear 132 (or development coupling section 132a) that receives drive from the image forming apparatus main body 170 and drives the development roller 106 is provided at the longitudinal drive side end.
- the first force receiving portion 152Rk and the second force receiving portion 152Rn of the moving member are located at the center of rotation of the developer drive input gear 132 (developer coupling portion 132a), which is indicated by a broken line, across the extension of line N. It is located on the opposite side of K. This arrangement makes it possible to efficiently arrange the functional parts.
- the process cartridge 100 and the image forming apparatus M can be made smaller. More specifically, when viewed from the direction along the rotational axis M2 and dividing the boundary by the straight line N, there is no developing roller such as the developing drive input gear 132 in the area AU1 where the developing coupling portion 132a is arranged. A driving member such as 106 for driving members included in the developing unit 109 is arranged. Therefore, it is better to arrange at least a part of the force receiving part 152Rh in the area AD1 where the developer coupling part 132a is not arranged than in the area AU1 where the developer coupling part 132a is arranged to avoid interference between the members. This allows for an efficient layout. This leads to miniaturization of the process cartridge 100 and the image forming apparatus M.
- the area AU1 and the area AD1 are the area where the swing axis K or the developer coupling part 132a is arranged, when the boundary is divided by the straight line N when viewed from the direction along the rotational axis M2. defined as an area where there is no However, other definitions are also possible.
- Area AU1 and area AD1 are areas where charging roller 105 or its rotation axis (rotation center) M5 is arranged and areas where it is not arranged, when the boundaries are divided by straight line N when viewed from the direction along rotation axis M2. It may also be defined as
- FIG. 236 is a schematic cross-sectional view of the process cartridge 100 in a separated state as viewed in the direction along the rotation axis M2.
- the developing blade 130, the adjacent point 130d, the stirring The member 129a, the rotation axis M7 of the stirring member 129a, or the pushed surface 152Rf may be defined as a region where it is arranged and a region where it is not arranged.
- the proximity point 130d is the position of the developing blade 130 closest to the surface of the developing roller 106.
- the device main body 170 In a general electrophotographic cartridge, especially a cartridge used in an in-line layout image forming apparatus, other members of the cartridge are relatively difficult to arrange in the area AD1. Further, when at least a portion of each of the force receiving portions 152Rk (152Lk) and 152Rn (152Ln) is arranged in the region AD1, the device main body 170 also has the following advantages. In other words, the separation control member 196R (196L) of the apparatus main body 170 is placed below the cartridge and moved in a substantially horizontal direction (in this embodiment, in the W41 and W42 directions, which is the arrangement direction of the photosensitive drums 104 or the cartridges 100). to press the force receiving portion 152Rh (152Lh).
- the separation control member 196R (196L) and its drive mechanism can be made relatively simple or compact. This is particularly noticeable in image forming apparatuses with an inline layout. In this way, arranging at least a portion of each of the force receiving portions 152Rk (152Lk) and 152Rn (152Ln) in the region AD1 can be expected to contribute to downsizing and cost reduction of the device main body 170.
- the contact portion between the spacer 151R and the moving member 152R is arranged such that the distance e3 is longer than the distance e1.
- the spacer 151R and the drive-side cartridge cover member 116 can be brought into contact with each other with a lighter force. In other words, it is possible to stably separate the developing roller 106 and the photosensitive drum 104.
- FIG. 235 is a side view (partially sectional view) of the process cartridge 100 in the abutting state as seen in the direction along the rotational axis M2.
- the arrangement of each force receiving portion 152Rk (152Lk) and 152Rn (152Ln) is similar to that described above.
- the VD1 direction is perpendicular to the straight line N.
- the moving member 152R and each of the force receiving parts 152Rk and 152Rn move between the standby position and the operating position by moving in the ZA direction and the opposite direction with respect to the drum frame and the developing frame. It is the composition.
- the moving member 152R and each force receiving part 152Rk, 152Rn are displaced at least in the VD1 direction. That is, the moving member 152R and each of the force receiving parts 152Rk and 152Rn are displaced at least in the VD1 direction and move between the standby position and the operating position.
- the developing unit 109 when the moving member 152R is in the operating position, the developing unit 109 is moved between the developing position and the retracted position by receiving force from the separation control member 196R at each of the force receiving portions 152Rk and 152Rn. be able to.
- the movable member 152R When the movable member 152R is in the standby position, the movable member 152R and each force receiving portion 152Rk, 152Rn interfere with the separation control member 196R, making it impossible to insert or remove the process cartridge 100 from the apparatus main body 170. It can be avoided.
- the protruding portion 152Rh provided with each of the force receiving portions 152Rk and 152Rn is arranged at a position protruding from the developing unit 109 at least in the VD1 direction. Therefore, it is possible to arrange the protrusion 152Rh in the space 196Rd between the first force applying surface 196Ra and the second force applying surface 196Rb of the separation control member 196R. The same applies to the configuration on the non-drive side. [Details of arrangement of separation and contact mechanisms 150R and L - Part 2]
- FIG. 236 and 237 are schematic cross-sectional views of the process cartridge 100 viewed from the drive side along the rotational axis M1, rotational axis K, or rotational axis M2 of the developing unit 109, with FIG. 236 in the separated state and FIG. 237 in the Indicates connection status.
- the arrangement of the spacer 151 and the moving member 152 which will be explained later, there is no distinction between the driving side and the non-driving side, and they are common to both, and are almost the same in the contact state and the separated state, so the explanation will be as follows. Only the separated state on the drive side will be described using FIG. 236, and explanations on the non-drive side and the contact state will be omitted.
- the rotation axis of the toner transport roller (developer supply member) 107 is defined as the rotation axis (rotation center) M6.
- the process cartridge 100 includes an agitation member 108 that rotates and agitates the developer contained in the development unit 109, and its rotation axis is defined as a rotation axis (rotation center) M7.
- intersection MX1 A tangent to the surface of the photosensitive drum 104 passing through the intersection MX1 is a tangent (predetermined tangent) N11.
- the areas are divided along the tangent line N11, and include a rotational axis M1, a charging roller 105, a rotational axis M5, a developing roller 106, a rotational axis M2, a developer coupling section 132a, a rotational axis K, a developing blade 130, a proximity point 130d, and toner transport.
- the area where the roller 107, the rotational axis M6, the stirring member 129a, the rotational axis M7, or the pushed surface 152Rf are arranged is an area AU2, and the area where they are not arranged is an area (predetermined area) AD2. Further, the areas AU2 and AD2 may be defined in another way as follows.
- the VD10 direction is a direction parallel to and in the same direction as the direction from the rotational axis M5 to the rotational axis M1
- the most downstream part of the photosensitive drum 104 in the VD10 direction is the intersection MX1.
- an area upstream of the most downstream portion MX1 is an area AU2
- an area downstream is an area (predetermined area) AD2.
- the defined areas AU2 and AD2 are the same in either expression.
- each force receiving portion 152Rk, 152Rn is arranged in area AD2.
- arranging at least a portion of each of the force receiving portions 152Rk and 152Rn in the area AD2 can be expected to contribute to downsizing and cost reduction of the process cartridge 100 and the apparatus main body 170. This is for the same reason as when at least a portion of each of the force receiving portions 152Rk and 152Rn is arranged in the region AD1. The same applies to the configuration on the non-drive side.
- the moving member 152R and each force receiving portion 152Rk, 152Rn are displaced at least in the VD10 direction by movement in the ZA direction and the opposite direction. That is, the moving member 152R and each of the force receiving parts 152Rk and 152Rn are displaced at least in the VD10 direction and move between the standby position and the operating position. According to this configuration, when the moving member 152R is in the operating position, the developing unit 109 is moved between the developing position and the retracted position by receiving force from the separation control member 196R at each of the force receiving portions 152Rk and 152Rn. be able to.
- the protruding portion 152Rh provided with each of the force receiving portions 152Rk and 152Rn is arranged at a position protruding from the developing unit 109 at least in the VD10 direction. Therefore, it is possible to arrange the protrusion 152Rh in the space 196Rd between the first force applying surface 196Ra and the second force applying surface 196Rb of the separation control member 196R. The same applies to the configuration on the non-drive side. [Details of arrangement of separation and contact mechanisms 150R and L - Part 3]
- FIG. 238 is a schematic cross-sectional view of the process cartridge 100 in a separated state viewed from the drive side along the rotational axis M1, rotational axis K, or rotational axis M2 of the developing unit 109.
- the spacer 151 and the moving member 152 which will be described later, there is no distinction between the driving side and the non-driving side, and the arrangement is the same for both sides, and is also substantially the same for both the contact state and the separated state. The description will be made only regarding the separated state on the driving side using FIG. 238, and the description on the non-driving side and the contact state will be omitted.
- intersection MX2 A tangent to the surface of the developing roller 106 passing through the intersection MX2 is a tangent (predetermined tangent) N13.
- the areas are divided along the tangent line N13, and include a developing coupling portion 132a, a rotational axis K, a rotational axis M2, a charging roller 105, a rotational axis M5, a developing blade 130, a proximity point 130d, a toner transport roller 107, a rotational axis M6, and stirring.
- the area where the member 129a, the rotational axis M7, or the pushed surface 152Rf are arranged is defined as an area AU3, and the area where the member 129a, the rotation axis M7, or the pushed surface 152Rf is not arranged is defined as an area (predetermined area) AD3.
- the areas AU3 and AD3 may be defined in another way as follows. That is, assuming that the direction parallel to and in the same direction as the direction from the rotation axis K to the rotation axis M2 is the VD12 direction, the most downstream part of the developing roller 106 in the VD12 direction is the intersection point MX2. In the VD12 direction, an area upstream of the most downstream portion MX2 is an area AU3, and an area downstream is an area (predetermined area) AD3.
- the defined areas AU3 and AD3 are the same in either expression.
- each force receiving portion 152Rk, 152Rn is arranged in area AD3.
- arranging at least a portion of each of the force receiving portions 152Rk and 152Rn in the area AD3 can be expected to contribute to miniaturization and cost reduction of the process cartridge 100 and the apparatus main body 170. This is for the same reason as when at least a portion of each of the force receiving portions 152Rk and 152Rn is arranged in the region AD1. The same applies to the configuration on the non-drive side.
- the moving member 152R and each of the force receiving parts 152Rk and 152Rn are displaced at least in the VD12 direction by movement in the ZA direction and the opposite direction.
- the moving member 152R and each of the force receiving parts 152Rk and 152Rn are displaced at least in the VD12 direction and move between the standby position and the operating position. According to this configuration, when the moving member 152R is in the operating position, the developing unit 109 is moved between the developing position and the retracted position by receiving force from the separation control member 196R at each of the force receiving portions 152Rk and 152Rn. be able to.
- the protruding portion 152Rh provided with each of the force receiving portions 152Rk and 152Rn is arranged at a position protruding from the developing unit 109 at least in the VD12 direction. Therefore, it is possible to arrange the protrusion 152Rh in the space 196Rd between the first force applying surface 196Ra and the second force applying surface 196Rb of the separation control member 196R. The same applies to the configuration on the non-drive side. [Details of arrangement of separation and contact mechanisms 150R and L - Part 4]
- FIG. 239 is a schematic cross-sectional view of the process cartridge 100 in a separated state, viewed from the drive side along the rotational axis M1, rotational axis K, or rotational axis M2 of the developing unit 109.
- the spacer 151 and the moving member 152 which will be explained later, there is no distinction between the driving side and the non-driving side, and they are the same on both sides, and are also substantially the same in the contact state and the separated state, so The explanation will be made only regarding the separated state on the drive side using FIG. 239, and the explanation on the non-drive side and the contact state will be omitted.
- intersection MX2 A tangent to the surface of the developing roller 106 passing through the intersection MX2 is a tangent (predetermined tangent) N14.
- each force receiving portion 152Rk, 152Rn is arranged in area AD4.
- arranging at least a portion of each of the force receiving portions 152Rk and 152Rn in the area AD4 can be expected to contribute to miniaturization and cost reduction of the process cartridge 100 and the apparatus main body 170. This is for the same reason as when at least a portion of each of the force receiving portions 152Rk and 152Rn is arranged in the region AD1. The same applies to the configuration on the non-drive side.
- the moving member 152R and each force receiving part 152Rk, 152Rn are displaced at least in the VD14 direction perpendicular to the straight line N14 by movement in the ZA direction and the opposite direction. That is, the moving member 152R and each of the force receiving parts 152Rk and 152Rn are displaced at least in the VD14 direction and move between the standby position and the operating position. According to this configuration, when the moving member 152R is in the operating position, the developing unit 109 is moved between the developing position and the retracted position by receiving force from the separation control member 196R at each of the force receiving portions 152Rk and 152Rn. be able to.
- the protruding portion 152Rh provided with each of the force receiving portions 152Rk and 152Rn is arranged at a position protruding from the developing unit 109 at least in the VD14 direction. Therefore, it is possible to arrange the protrusion 152Rh in the space 196Rd between the first force applying surface 196Ra and the second force applying surface 196Rb of the separation control member 196R. The same applies to the configuration on the non-drive side.
- the structure for the drum unit 108 to stably hold the developing unit 109 in the retracted position and the developing position respectively includes the spacer 151R that can take the first position and the second position as a holding member.
- the spacer holding section 151Rb which is a part of the holding section 151Rb, is a holding section.
- the configuration of this embodiment can also be viewed as follows. That is, at least the spacer 151R, the first support portion 128c of the developer cover member 128, and the cover of the drive side cartridge cover member 116 serve as a holding mechanism in which the drum unit 108 stably holds the developer unit 109 at the retracted position and the development position.
- the holding mechanism when the spacer 151R is in the first position and the developing unit 109 is in the retracted position, the holding mechanism is in the first state, and when the spacer 151R is in the second position and the developing unit 109 is in the developing position, the holding mechanism is in the first state. can be said to be in the second state.
- Example 2 will be described using FIGS. 42 to 46.
- configurations and operations different from those of the previously described embodiments will be explained, and members having similar configurations and functions will be given the same reference numerals and explanations will be omitted.
- a separation abutment mechanism 150R and a separation abutment mechanism 150L were provided on the drive side and the non-drive side, respectively, as separation abutment mechanisms.
- a configuration in which a separation and contact mechanism is provided only on one side of the process cartridge will be described.
- FIGS. 42 to 46 are diagrams showing the state when the developing unit 109 is at the separated position and the moving member of the separating and abutting mechanism is at the protruding position.
- FIG. 42(a) is a perspective view of the process cartridge 100 of Example 1 viewed from below on the driving side.
- FIG. 42(b) is a schematic diagram showing the amount of separation of the developing roller 106 from the photosensitive drum 104 of the process cartridge 100 of the first embodiment.
- the separation amount P1 in Example 1 is set to be the same amount on the drive side and the non-drive side.
- the separation amount P1 can be changed by changing the distance n1 from the swing axis H of the spacer 151 to the contact surface 151Rc.
- the spacing amount is changed using a similar configuration.
- FIG. 43 the separation and contact mechanism 250-1 of the process cartridge 200-1 is arranged only on the drive side, and there is no separation and contact mechanism on the non-drive side.
- FIG. 43(a) is a perspective view of the process cartridge 200-1 viewed from below on the drive side.
- FIG. 43(b) is a schematic diagram showing the amount of separation of the developing roller 106 from the photosensitive drum 104 of the process cartridge 200-1.
- the separation on the drive side is smaller than the amount P2-1R.
- the separation amount P2-1R on the driving side is changed to the separation amount P2-1R on the driving side so that the separation amount P2-1L on the non-driving side does not become 0, that is, so that the developing roller 106 and the photosensitive drum 104 do not come into contact with each other on the non-driving side. It is set larger than P1 (see FIG. 42(b)).
- Example 1 the same effect as in Example 1 can be obtained. Furthermore, since there is no separation and contact mechanism on the non-drive side, the size and cost of the process cartridge and the main body of the image forming apparatus can be reduced.
- FIG. 44 shows another form 1 of this embodiment.
- the separation and contact mechanism 250-2 of the process cartridge 200-2 is arranged only on the drive side, and there is no separation and contact mechanism on the non-drive side.
- FIG. 44(a) is a perspective view of the process cartridge 200-2 viewed from below on the driving side.
- FIG. 44(b) is a schematic diagram showing the distance of the developing roller 106 from the photosensitive drum 104 of the process cartridge 200-2.
- the drive-side separation amount P2-2R is set to be equal to or smaller than the separation amount P1 of the first embodiment.
- the developing roller 106 and the photosensitive drum 104 come into contact on the non-drive side due to the biasing force of a developing pressure spring (not shown in FIG. 43, see 134 in FIG. 34).
- a developing pressure spring not shown in FIG. 43, see 134 in FIG. 34.
- the contact range m2 on the non-drive side is set within a range that does not enter the image forming area m4, the image will not be affected.
- the contact area m2 must not be limited to the image forming area. There is no need to set it within m4. That is, in such a case, the contact range m2 may be set to a range that falls within the image forming area m4.
- FIG. 45 shows another form 2 of this embodiment.
- the separation and contact mechanism 250-1 of the process cartridge 200-3 is arranged only on the non-drive side, and there is no separation and contact mechanism on the drive side.
- FIG. 45(a) is a perspective view of the process cartridge 200-3 viewed from below on the non-driving side.
- FIG. 45(b) is a schematic diagram showing the distance of the developing roller 106 from the photosensitive drum 104 of the process cartridge 200-3.
- the non-drive side The driving side separation amount P2-3R is smaller than the separation amount P2-3L.
- the separation amount P2-3L on the non-drive side is changed to the separation amount P1 of Example 1 so that the separation amount P2-3R on the driving side does not become 0, that is, so that the developing roller 106 and the photosensitive drum 104 do not come into contact with each other on the driving side. It is set larger.
- Example 2 the same effect as in Example 1 can be obtained. Furthermore, since there is no separation and abutment mechanism on the drive side, it is possible to downsize and reduce the cost of the process cartridge and the main body of the image forming apparatus.
- FIG. 46 shows three other forms of this embodiment.
- the separation and contact mechanism 250-4 of the process cartridge 200-4 is arranged only on the non-drive side, and there is no separation and contact mechanism on the drive side. Further, when the developing unit 109 is in the separated position, the driving side end of the developing roller 106 and the photosensitive drum 104 are connected.
- FIG. 46(a) is a perspective view of the process cartridge 200-4 viewed from below on the drive side.
- FIG. 46(b) is a schematic diagram showing the amount of separation of the developing roller 106 from the photosensitive drum 104 of the process cartridge 200-4.
- the spacing amount P2-4L on the non-drive side is set to a spacing amount that is equal to or smaller than the spacing amount P1 of the first embodiment.
- the developing roller 106 and the photosensitive drum 104 come into contact on the driving side due to the influence of the drive input gear (not shown in FIG. 46, see 132a in FIG. 1).
- the contact range m5 on the drive side is set within a range that does not enter the image forming area m4, the image will not be affected.
- the amount of separation between the driving side and the non-driving side can be set arbitrarily within a range that does not affect the image.
- the amount of separation between the driving side and the non-driving side can be set arbitrarily within a range that does not affect the image.
- Example 3 of the present invention will be described using FIGS. 47 to 55.
- FIG. 47 is a diagram illustrating the disassembly and assembly of the non-drive side moving member 352L.
- a movable member corresponding to the movable member 152L in the first embodiment is divided into two parts and connected.
- the moving member 352L is divided into two parts: an upper moving member 352L1 and a lower moving member 352L2.
- the lower moving member 352L2 is provided with a shaft 352L2a. Further, as shown in FIG.
- the lower moving member 352L2 includes a protruding portion 352Lh that can protrude from the developing unit in the ZA direction, and the protruding portion 352Lh has a first force receiving portion (retraction force receiving portion, separation force receiving portion). ) 352Lk and a second force receiving part (contact force receiving part) 352Ln are provided.
- the upper moving member 352L1 has an open portion 352L1d on the surface facing the lower moving member 352L2. Further, the upper moving member 352L1 has a separation pressing portion 352L1q that presses the non-drive side bearing 327.
- a pair of elongated round holes 352L1h are provided in the upper moving member 352L1 with an open portion 352L1d in between.
- the lower moving member 352L2 is provided with a spring holding portion 352L2b.
- One end of the compression spring 352Lsp is fitted into the spring holding part 352L2b, the other end is inserted through the open part 352L1d, supported by a holding part (not shown) in the back thereof, and then each shaft 352L2a is inserted into each oval hole 352L1h. Assemble so that they fit together.
- the tip 352L1a is expanded while being assembled, so 352L is preferably made of plastic material.
- the shafts 352L2a and 352L2 may be constructed separately.
- the shaft 352L2a may be press-fitted into the shaft 352L2 last.
- the upper moving member 352L1 and the lower moving member 352L2 are connected by the oblong hole 352L1h and the pair of shafts 352L2a, and the upper moving member 352L1 is urged away from the lower moving member 352L2 by the compression spring 352Lsp.
- the structure is as follows. Further, the lower moving member 352L2 is configured to be rotatable about the shaft 352L2a with respect to the upper moving member 352L1. Further, it is configured to be movable relative to the upper moving member 352L1 in a direction along the elongated circular hole 352L1h2. [Operation explanation of moving parts]
- FIGS. 48(a) to 48(d) the operation of the moving member 352L will be explained using FIGS. 48(a) to 48(d).
- the moving member 352L is pressed by the cartridge pressing unit 190 in conjunction with the operation of closing the front door 11. The operation of the moving member 352L at that time will be explained.
- FIGS. 48(a) and (b) show a state in which the moving member 352L is not pressed by the cartridge pressing mechanism 190 (free state), and FIGS. 48(c) and (d) show that the moving member 352L is not pressed by the cartridge pressing mechanism 190. This shows the state in which it is pressed (locked state).
- the lower moving member 352L2 has a groove formed between the arc-shaped guide ribs 327g1 and 327g2, which are provided on the non-drive side bearing 327 and are centered on the swing axis HE. 352L2a fits.
- the upper moving member 352L1 is movable in the longitudinal direction of the elongated hole and in the ZA direction by fitting the elongated round hole 352L1h2 into the axis HE of the bearing 327, and can swing about the axis HE. As described above, the lower moving member 352L2 is swingable about the shaft portion 352L2a with respect to the upper moving member 352L1. When the cartridge pressing mechanism 190 pushes the upper moving member 352L1, the upper moving member 352L1 can approach the lower moving member 352L2.
- the lower moving member 352L2 rotates about the shaft portion 352L2a as shown in FIG. 48(a). It can swing in the directions of arrows ⁇ u and ⁇ u' with a radius Rx. Therefore, the first force receiving part (retreat force receiving part, separation force receiving part) 352Lk and the second force receiving part (contact force receiving part) 352Ln of the lower moving member 352L2 receive the force and swing in the directions of the arrows ⁇ u and ⁇ u'. Even if the upper moving member 352L1 moves, no force is transmitted to the separation pressing portion 352L1q that presses the non-drive side bearing 327 of the upper moving member 352L1.
- the upper moving member 352L1 moves toward the lower moving member 352L2 against the biasing force of the spring 352Lsp, and as shown in FIGS.
- the engaging portion (square shaft portion) 352L1a fits into the engaged portion (square hole portion) 352L2h, and the upper moving member 352L1 and the lower moving member 352L2 become integral.
- the lower moving member 352L2 is restricted from swinging about the shaft portion 352L2a relative to the upper moving member 352L1.
- the integrated moving member 352L has the moving member swing axis HE as the center of rotation, as shown in FIG. While the shaft 352L2a moves through the formed groove, it can swing in the directions of arrows ⁇ w and ⁇ w' with a rotation radius Ry shown in FIG. 48(c).
- the movable member 352L can take the same movement as the movable member 152L in the first embodiment.
- the lower moving member 352L2 can swing with a rotation radius Rx (see FIG. 48(a)) smaller than the rotation radius Ry described above.
- the spacer (holding member) 351L has the same configuration as in the first embodiment, and is urged to rotate clockwise at the portion 351Lf by a biasing member 153 (not shown for simplicity in this embodiment). [Installing the process cartridge into the image forming apparatus main body]
- FIG. 49A shows a state in which the process cartridge 300 is being inserted into the image forming apparatus main body 170.
- FIG. 49(b) shows a state in which the process cartridge 300 is being taken out from the image forming apparatus main body 170.
- FIG. 49(c) shows the state immediately after the process cartridge 300 has been inserted into the image forming apparatus main body 170.
- the lower moving member 352L2 can swing around the shaft portion 352L2a as the center of rotation, as shown in FIG. 49(e).
- the lower moving member 352L2 is at the same position as the normally protruding position of the moving member 152 in the first embodiment (see FIG. 35). Therefore, similarly to the first embodiment, when the process cartridge 300 mounted on the cartridge tray 171 (not shown) is inserted into the image forming apparatus main body 170 in the direction of the arrow X1, the separation control member 196L and the lower moving member 352L2 interfere with each other. .
- the lower moving member 352L2 swings in the direction of the arrow ⁇ u' with the shaft portion 352L2a as the center of rotation, and the separation control member 196L and the lower moving member 352L2 interfere with each other. This makes it possible to avoid the possibility that the device cannot be inserted into the device main body 170 due to the inconvenience.
- the lower moving member 352L2 swings in the direction of arrow ⁇ u' to press the spacer 351L and move it from the separation holding position to the separation release position, and the developing unit 109 moves to the developing position (contact position).
- the separation control member 196L performs a reciprocating operation in the W42 direction and the W41 direction, so the developing unit 109 returns to the separation position (retracted position) again when image formation preparation is completed.
- FIG. 50(a) when the insertion of the cartridge tray 171 into the apparatus main body 170 is completed, the lower moving member 352L2 contacts the separation control member 196L, and is in the state shown in FIG. 50(b). In some cases, the vehicle may not reach this point and may stop somewhere in the middle. A method for reliably avoiding this situation will be explained using FIGS. 50 and 51.
- the upper moving member 352L1 is provided with a convex portion 352L1p that becomes a rotation assisting portion.
- the lower moving member 352L2 is provided with a slope 352L2s. This convex portion 352L1p contacts the slope 352L2s when the upper moving member 352L1 descends, and rotates the lower moving member 352L2 in the direction of the arrow ⁇ u.
- the lower moving member 352L2 rotates in the direction of the arrow ⁇ u, and rotates to the position shown in FIG. 50(b) while pushing down the separation control member 196L in the direction of the arrow ⁇ u.
- the moving member 352L1 since the moving member 352L1 is in a free state, when the lower moving member 352L2 receives a force from the first force receiving part (retreat force receiving part, separation force receiving part) 352Lk, the shaft It swings in the direction of arrow ⁇ u with the portion 352L2a as the center of rotation. However, the force received by the first force receiving part (retreat force receiving part, separation force receiving part) 352Lk is transmitted to the separation pressing part 352L1q which presses the non-drive side bearing 327 of the developing unit 109 of the upper moving member 352L1. Not done. In other words, the moving member 352L1 cannot move the developing unit 109.
- This state is a transmission release state in which the transmission of the pressing force is released. Therefore, it is possible to prevent the separation control member 196L and the lower moving member 352L2 from interfering with each other and becoming unable to be removed from the apparatus main body 170.
- a process cartridge used in a color image forming apparatus will be described. Therefore, there are four process cartridges and four separation control members. Therefore, depending on the station, the operation shown in FIG. 49 may be repeated up to four times.
- FIG. 53(a) is a diagram showing the moment of contact between the developing roller 106 and the photosensitive drum 104
- FIG. 53(b) is a diagram showing the separation operation of the developing unit 109
- FIG. It is a diagram showing details.
- the moving member 352L is in a locked state and is in a state where it can play substantially the same role as the moving member 152L shown in the first embodiment. Therefore, the moving member 352L receives force from the separation control member 196L and acts on the spacer 351L to release the separation.
- the member brought into contact with the spacer 351L may be either the upper moving member 352L1 or the lower moving member 352L2.
- the contact pressing portion that presses the spacer 351L during the contact operation may be provided on at least one of the upper moving member 352L1 and the lower moving member 352L2.
- a force is applied from the separation control member 196L, and the separation pressing portion 352L1q of the upper moving member 352L1 integrated with the lower moving member 352L2 comes into contact with the shaft portion 327a, so that the entire developing frame 325 is moved. oscillate.
- the force received by the first force receiving portion 352Lk is transmitted to the separation pressing portion 352L1q, and the non-drive side bearing 237 is moved so as to move the developing unit 109 from the developing position to the retracted position. is a possible transmission state.
- the spacer 351L moves by the same operation as in the first embodiment and maintains the spaced state.
- FIG. 54 is an external view showing the configuration of the drive side of the developing unit portion of the process cartridge 300.
- the driving side moving member 352R is a member corresponding to the moving member 152R in Example 1, and has a structure in which an upper moving member 352R1 and a lower moving member 352R2 are connected, like the non-driving side moving member 352L. [Separation abutment mechanism for drive side and non-drive side]
- FIG. 55 is a perspective view of the process cartridge 300 viewed from the developing device side.
- a moving member 352L is arranged on the non-driving side and a moving member 352R is arranged on the driving side.
- the moving member 352L may be provided only on the non-drive side.
- a configuration may be adopted in which the moving member 352R is provided only on the drive side.
- the lower moving member 352L2 including the first force receiving part (retreat force receiving part, separation force receiving part) 352Lk and the second force receiving part (contact force receiving part) 352Ln is replaced with the upper moving member 352L1 and It is made movable relative to other parts of the process cartridge 300.
- the first force receiving part 352Lk and the second force receiving part 352Ln are displaced in the ZA direction, thereby causing the direction VD1 (FIG. 40 etc.), direction VD10 (FIG. 236 etc.), direction VD12 (FIG. 238) and at least in the direction VD14 (FIG. 239).
- the movable member 352L2 can be switched between a movable state (free state) and a state fixed to the upper movable member 352L1 (locked state) depending on the position of the upper movable member 352L1.
- the lower moving member 352L2 and the apparatus main body 170, especially the separation control member 196L interfere with each other and the process cartridge 300 is inserted or removed. It is possible to avoid being unable to do so.
- Example 4 will be described using FIGS. 58 to 66.
- FIG. 58 is a diagram illustrating the disassembly and assembly of the non-drive side moving member 652L described in the sixth embodiment.
- the moving member corresponding to the moving member 152L in the first embodiment interacts with the separation control member 196L in the longitudinal direction (Y1, Y2 direction).
- the Y1 and Y2 directions are directions parallel to the rotational axis M1 of the photosensitive drum 104 and the rotational axis M2 of the developing roller 106 in the first embodiment. The insertion and removal of the moving member while avoiding the separation control member 196L will be described later.
- the specific configuration of the moving member 652L is a two-part structure including an upper moving member 652L1 and a lower moving member 652L2, as shown in FIG.
- FIG. 58(a) shows the state before the upper moving member 652L1 and the lower moving member 652L2 are assembled.
- FIGS. 58(b) and 58(c) show the upper moving member 652L1 and lower moving member 652L2 after being assembled.
- the upper moving member 652L1 has a pair of elongated round holes 652L1h facing each other in the X1 and X2 directions in a portion that overlaps the lower moving member 652L2 in the direction in which the process cartridge is inserted into and removed from the main body of the image forming apparatus (X1 and X2 directions, see FIG. 62). is provided.
- the lower moving member 652L2 is provided with a shaft 652L2a. Further, as shown in FIG. 48(a), the lower moving member 652L2 includes a protruding portion 652Lh that can protrude from the developing unit in the ZA direction, and the protruding portion 652Lh has a first force receiving portion (retraction force receiving portion, separation force receiving portion).
- a compression spring 652Lsp is provided between the upper moving member 652L1 and the lower moving member 652L2.
- the compression spring 652Lsp has one end supported by the upper holding part 652L1d of the upper moving member 652L1, and the other end is seated on the seating surface 652L2c of the lower holding part 652L2b, and then assembled so that the shaft 652L2a fits into the oblong hole 652L1h.
- the moving member 652L that is assembled in this manner is preferably made of plastic material because when it is assembled so that the shaft 652L2a fits into the oblong hole 652L1h, the distal end portion 652L1a of the upper moving member 652L1 is expanded.
- the shaft 652L2a and the lower moving member 652L2 may be constructed separately.
- the shaft 652L2a may be press-fitted and assembled into the lower moving member 652L2 last.
- FIG. 59 is a perspective view of a two-part structure including an upper moving member 652L1 and a lower moving member 652L2. (Compression spring 652Lsp is not shown)
- the upper moving member 652L1 and lower moving member 652L2 of the assembled moving member 652L can take the following two states.
- One is a state in which the shaft 652L2a of the lower moving member 652L2 is located away from the upper holding part 652L1d with respect to the center of the elongated round hole 652L1h of the upper holding part 652L1d, as shown in FIGS. 58(b) and 59(a).
- the other is a state in which the shaft 652L2a of the lower moving member 652L2 is located close to the upper holding part 652L1d with respect to the center of the elongated round hole 652L1h of the upper holding part 652L1d, as shown in FIGS. 58(c) and 59(b). be.
- the moving member 652L is pressed by the cartridge pressing unit 190 in conjunction with the operation of closing the front door 11.
- the operation of the moving member 652L at that time will be explained.
- 60(a), (b) and FIG. 61(a) are in the free state described in FIG. 58(b) and FIG. 59(a), and the moving member 652L is in the cartridge pressing mechanism 190 indicates an unpressed state.
- 60(c), (d) and FIG. 61(b) show the locked state shown in FIG. 58(c) and FIG. 59(b), with the moving member 652L pressing the cartridge inside the image forming apparatus main body.
- a state in which it is pressed by mechanism 190 is shown.
- the upper moving member 652L1 is movable in the longitudinal direction of the oblong hole and in the ZA direction by fitting the oblong hole 652L1h2 into the swing axis HE of the bearing 627, and is also able to swing around the axis HE. It is.
- the lower moving member 652L2 is in a state where it can swing about the shaft portion 652L2a relative to the upper moving member 652L1, as described above.
- the lower moving member 652L2 prevents engagement with the separation control member 196L that engages with the moving member described in Embodiment 1 when it is inserted into or removed from the image forming apparatus main body, which will be described later.
- FIG. 63 which is an enlarged view of the seating surface 652L2c shown in FIG. 60(b) and FIG. Avoid by maintaining the swinging state in the Y3 direction.
- the seating surface 652L2c of the lower moving member 652L2 is set as a surface that directly faces the lower moving member 652L2 in a state in which the lower moving member 652L2 swings in the Y3 direction with respect to the upper holding portion 652L1d of the upper moving member 652L1.
- the elastic force of the compression spring 652Lsp provided between the upper moving member 652L1 and the lower moving member 652L2 causes the seating surface 652L2c to be centered with respect to the lower moving member 652L2 with respect to the shaft portion 652L2a so as to directly face the upper holding portion 652L1d.
- the oscillating state is maintained by applying a moment in the Y3 direction.
- the upper moving member 652L1 moves toward the lower moving member 652L2 against the spring 652Lsp.
- the shaft 652L2a of the lower moving member 652L2 comes into contact with the arc-shaped guide rib 627g of the bearing 627, so that the lower moving member 652L2 is biased in the direction in which the cartridge pressing mechanism 190 is pushed down.
- the tip portion 652L1a of the upper moving member 652L1 that has moved toward the lower moving member 652L2 enters the square hole portion 652L2h, thereby lowering the lower moving member 652L1.
- the moving member 652L2 swings around the shaft 652L2a, and as described above, the upper moving member 652L1 and the lower moving member 652L2 are integrated.
- the integrated moving member 652L swings in the X4 direction and the X5 direction at a rotation radius Rx with the moving member swing axis HE as the center of rotation.
- the moving member 652L rotates in the The arcuate guide rib 627g, which is the pressing portion, is pressed. This allows the developing unit 109 to be moved from the developing position toward the retracted position.
- the movable member 652L rotates in the X5 direction, and the contact pressing part 652Lr pushes the spacer 651L into the contact pressed part 621Le. Press.
- the spacer 651L can be moved from the restriction position (first position) to the permissible position (second position).
- the moving member 652L is in the locked state, it means that the force received by the first force receiving part (retreat force receiving part, separation force receiving part) 652Lk and the second force receiving part (contact force receiving part) 652Ln is separated. It is in a state where it can be transmitted to the pressing part 652Lq and the pressing part 652Lr when in contact.
- the movable member 652L can take the same movement as the movable member 152L in the first embodiment.
- the spacer (holding member) 651L has the same configuration as in the first embodiment, and is biased to rotate clockwise at the portion 651Lf by a biasing member 153 (not shown for simplicity in this embodiment).
- FIG. 62(a) is a longitudinal view showing a state in which the process cartridge 600 is being inserted into and removed from the image forming apparatus main body 170.
- FIG. 62(b) is a diagram showing a state in which the process cartridge 600 is being inserted into and removed from the image forming apparatus main body 170 from the insertion direction.
- FIG. 62(c) is a longitudinal view showing a state in which the process cartridge 600 is inserted into the image forming apparatus main body 170 and the front door 11 is closed.
- FIG. 62(a) is a longitudinal view showing a state in which the process cartridge 600 is being inserted into and removed from the image forming apparatus main body 170.
- 62(d) is a diagram showing a state in which the process cartridge 600 is inserted into the image forming apparatus main body 170 and the front door 11 is closed, viewed from the insertion direction.
- the lower moving member 652L2 can swing around the shaft portion 652L2a as the center of rotation, as shown in FIG. 58(b).
- FIG. 64(a) is a longitudinal view showing a state in which the process cartridge 600 is being inserted into and removed from the image forming apparatus main body 170.
- FIG. 64(b) is a diagram showing a state in which the process cartridge 600 is being inserted into and removed from the image forming apparatus main body 170 from the insertion direction.
- FIG. 64(c) is a sectional view taken along the line QQ shown in FIG. 64(b).
- FIG. 64(d) is a Q-Q sectional view of the state in which the process cartridge 600 is further inserted in the X1 direction from the state shown in FIG. 64(c).
- the slope 653L2d of the lower moving member 653L2 collides with the separation control member 196L, and the force in the insertion/extraction direction (X1, X2 direction) causes the separation control member 196L and lower part to move as shown in FIG. 64(c).
- the tip side portion of the lower moving member 652L2 moves in the longitudinal direction (Y1 direction). ) may be configured. In this way, when the process cartridge 600 is inserted into or removed from the image forming apparatus main body 170, the moving member 652L is in a free state.
- FIG. 65 is an external view showing the configuration of the drive side of the developing unit portion of the process cartridge 600.
- FIG. 66 is a perspective view of the process cartridge 600.
- the driving side moving member 652R is a member corresponding to the moving member 152R in Example 1, and has a structure in which an upper moving member 652R1 and a lower moving member 652R2 are connected, like the non-driving side moving member 652L. [Separation abutment mechanism for drive side and non-drive side]
- a moving member 652L is arranged on the non-driving side, and a moving member 652R is arranged on the driving side.
- the moving member 652L may be provided only on the non-drive side.
- the moving member 652R may be provided only on the drive side.
- the lower moving member 652L2 including the first force receiving part (retreat force receiving part, separation force receiving part) 652Lk and the second force receiving part (contact force receiving part) 652Ln is replaced with the upper moving member 652L1 and It is made movable relative to other parts of the process cartridge 600.
- the first force receiving part 652Lk and the second force receiving part 652Ln are displaced at least in the Y1 direction (direction parallel to the rotational axis M1 and the rotational axis M2 in the first embodiment).
- the partial moving member 652L2 can be switched between a movable state (free state) and a state fixed to the upper moving member 652L1 (locked state) depending on the position of the upper moving member 652L1.
- a movable state free state
- a state fixed to the upper moving member 652L1 locked state
- the lower moving member 652L2 interferes with the apparatus main body 170, especially the separation control member 196L, due to the above-mentioned free state. You can avoid being unable to do so.
- Example 5 of the present invention will be described using FIGS. 67 to 72.
- the process cartridge 400 has a separation contact mechanism 450R on the drive side and a separation contact mechanism 450L on the non-drive side.
- the spacing and abutment mechanisms first, details of the drive side spacing and abutment mechanism 450R will be explained, and then the non-drive side spacing and abutment mechanism 450L will be explained. Further, since the spacing and contact mechanism has almost the same function on the driving side and the non-driving side, R is added to the end of the reference numeral of each member on the driving side. On the non-drive side, the symbols of each member are the same as those on the drive side, and L is added to the end.
- FIG. 67 shows an assembled perspective view of the drive side of the process cartridge 400 including the separation and contact mechanism 450R.
- the separation and contact mechanism 450R includes a spacer 151R that is a regulating member (holding member), a moving member 452R that is a pressing member, and a tension spring 153.
- the moving member 452R is provided with a support receiving portion 452Ra that is a round through hole. Further, as shown in FIG.
- the movable member 452R includes a protruding portion 452Rh that can protrude from the developing unit in the ZA direction, and the protruding portion 452Rh has a first force receiving portion (retraction force receiving portion, separation force receiving portion) 452Rk and a second force receiving portion 452Rk.
- a dual force receiving portion (contact force receiving portion) 452Rn is provided.
- the moving member 452R is swingably attached to the second retaining portion 428m of the developing cover member 428.
- the developer support member 401R is attached to the end surface of the developer cover member 428.
- the development support member 401R is provided with a support cylinder 410Ra, a support spring receiving portion 401b, and a positioning receiving portion 401Rc.
- the developer support member 401R is attached so that the inner surface of the support cylinder 401Ra fits into the cylindrical portion 428b of the developer cover member 428.
- the outer surface of the support cylinder 401Ra is supported movably in the ZA direction by a developing unit support hole 416a of a drive side cartridge cover member 416 that constitutes a part of the drum frame of the drum unit 408.
- the developer support member 401R is provided with a slide guide 401Re.
- the slide guide 401Re fits into a guide protrusion 416e provided on the drive side cartridge cover member 416, and its movement is restricted so that it can move in the direction of the groove, thereby being positioned in a correct posture.
- the slide guide 401Re is a groove parallel to the ZA direction in which a developing unit 409, which will be described later, moves up and down. The supporting method will be described further below.
- One end of the developer support spring 402 is attached to the drive side cartridge cover member 416.
- the other end side of this developer support spring 402 is arranged at a position in contact with the support spring receiving portion 401Rb of the assembled developer support member 401R.
- the developer support spring 402 applies a force to the drive side cartridge cover member 416 to lift the developer support member 401R in the direction opposite to the ZA direction.
- FIG. 68 shows an assembled perspective view of the non-drive side of the process cartridge 400 including the separation and contact mechanism 450L.
- the assembled state of the spacing abutment mechanism 450L will be explained.
- the non-driving side bearing member 427 is fixed to the developing frame 125 and rotatably supports the developing roller 106 and the toner transport roller 107.
- the non-drive side bearing member 427 has a support cylindrical portion 427a for supporting the developer support member 401L, a support portion 427b for supporting the spacer 151L, and a support portion 427f for supporting the moving member 452L.
- the moving member 452R includes a protruding portion 452Lh that can protrude from the developing unit in the ZA direction, and the protruding portion 452Rh has a first force receiving portion (retraction force receiving portion, separation force receiving portion) 452Lk and a second force receiving portion 452Lk.
- a dual force receiving portion (contact force receiving portion) 452Ln is provided.
- the developer support member 401L is supported by fitting the oblong hole 401Lb into the support cylindrical portion 427a of the non-drive side bearing member 427.
- This oblong hole is provided in the non-drive side support portion 401Lb in order to allow for misalignment due to manufacturing errors between the drive side and the non-drive side of the portion that supports the developing unit 409.
- the development support member 401L is provided with a cylindrical portion 401La so as to cover the oblong hole 401Lb.
- the cylindrical portion 401La is supported by the developing unit support hole 417a of the non-drive side cartridge cover member 417.
- the development support member 401L is provided with a guide protrusion 401Le.
- the guide protrusion 401Le fits into a groove-shaped slide guide 417e provided on the non-drive side cartridge cover member 417, and its movement is restricted so that it can move in the longitudinal direction of the groove (ZA direction), thereby maintaining the correct posture.
- the slide guide 417e is a groove parallel to the ZA direction in which a developing unit 409, which will be described later, moves up and down. The supporting method will be described further below.
- the developer support member 401L receives a force to lift the non-drive side cartridge cover member 417 upward in the direction of arrow Z1 by the developer support spring 402.
- FIG. 69 shows a side view of the process cartridge 400 as seen from the driving side
- FIG. 70 shows a side view as seen from the non-driving side.
- the supporting cylinder 401Ra of the developing supporting member 401R is supported by the developing unit supporting hole 416a of the drive side cartridge cover member 416.
- the developing unit support hole 416a is an elongated round hole in the direction of arrow ZA.
- the developer support member 401R is movable in the ZA direction and the opposite direction within the developer unit support hole 416a.
- the developer support spring 402 is shown in a perspective view with a broken line.
- the developer support spring 402 pushes up the support spring receiving portion 401b of the developer support member 401R in the direction opposite to the ZA direction. Since the developer supporting member 401R supporting the developing unit 409 is pushed up in the direction opposite to the ZA direction, the developing unit 409 is lifted up in the direction opposite to the ZA direction inside the drive side cartridge cover member 416.
- the process cartridge 400 is outside the apparatus main body 170, and the photosensitive drum and developing roller are separated.
- the spacer 151R contacts the contact surface 416c of the drive side cartridge cover member 416 to prevent the developing unit 109 from approaching the photosensitive drum.
- the non-drive side mechanism in the fully assembled state will be explained using FIG. 70.
- the support cylinder 401La of the developer support member 401L is supported by the developer unit support hole 417a of the non-drive side cartridge cover member 417.
- the developing unit support hole 417a movably supports the support cylinder 402La by two surfaces 417a1 and 417a2 parallel to the ZA direction, which is the same as the long hole direction of the drive side support hole 416a. Furthermore, the amount of movement of the developer support member 401L is regulated by the lower regulating surface 417a3.
- the non-drive side cartridge cover member 417 supports the developer support member 410L movably in the ZA direction and the opposite direction through the developer unit support hole 417a.
- the developer support spring 402L pushes up the support spring receiving portion 401Lb of the developer support member 401L in a direction opposite to the ZA direction. Since the developer supporting member 401L supporting the developing unit 409 is pushed up in the direction opposite to the ZA direction, the developing unit 409 is lifted in the direction opposite to the ZA direction within the non-drive side cartridge cover member 417. [Operation when installing the process cartridge into the device body]
- FIG. 71 is a side view of the process cartridge 400 and parts of the apparatus main body 170 that are involved in mounting, viewed from the drive side.
- FIG. 71(a) shows the process cartridge 400 being installed while moving in the direction of arrow X1 between the pressing mechanism 191 of the apparatus main body 170 located above and the developer spacing control unit 195 located below.
- the operating mechanism of the pressing mechanism 191 (a mechanism that moves in the Z1 and Z2 directions in conjunction with the opening and closing of the front door 11) is the same as in the first embodiment, so detailed explanation will be omitted.
- the moving member 452R is in a state in which it has advanced to the front of the separation control member 196R.
- the process cartridge 400 moves while being placed on the tray 171 shown in FIG. 5, but in order to simplify the drawing, the entire tray 171 is not shown, and only the portion that supports the drive-side cartridge cover member 416 is shown with broken lines. It was shown in
- FIG. 71(b) shows a state in which the process cartridge 400 moves in the X1 direction and the moving member 452R is above the separation control member 196.
- the moving member 452R is lifted together with the developing unit 409 in the direction of arrow Z1 and is in the storage position (standby position), so it does not collide with the separation control member 196R.
- FIG. 71(c) shows a state in which the process cartridge 400 has advanced to the mounting position with respect to the image forming apparatus main body 170 in the X1 direction.
- a state in which the pressing mechanism 191 has begun to press the pressed portion 401Rc of the developer support member 401 in the direction of arrow Z2 is shown.
- the entire developing unit 409 moves in the ZA direction (predetermined direction)
- the moving member 452R also moves in the ZA direction (predetermined direction), thereby performing separation control.
- the member 196 reaches the protruding position (operating position) where the member 196 enters the space 196Rd.
- the developer support spring 402 described with reference to FIG. 69 is compressed by the force from the pressing mechanism 191.
- the developer support member 401 moves in the ZA direction along the long round hole of the developer unit support hole 416a.
- the ZA direction is a direction perpendicular to the X1 direction.
- FIG. 71(d) shows the state after the pressing mechanism 191 has further moved in the direction of arrow Z2 from the state of FIG. 71(c).
- the pressing mechanism 191 presses the positioning receiving portion 410Rc of the developer support member 401 in the direction of arrow Z2 and pushes it down.
- the entire developing unit 409 is pushed down in the direction of arrow ZA, and the moving member 452R enters the space 196Rd of the separation control member 196.
- the installation of the process cartridge 400 into the apparatus main body 170 is completed.
- the spring force of the developer support spring 402 in the direction opposite to the ZA direction is set lower than the pressing force of the pressing mechanism 191. Further, it is desirable to arrange the developer support spring 402 so that it can expand and contract in the ZA direction, but if the spring force is set appropriately, the arrangement can also be selected so that it can expand and contract in other directions including the ZA direction component. can.
- FIG. 72 is a side view seen from the drive side, with the pressing mechanism 191 not shown in FIG. 71.
- FIG. 72(a) is a diagram illustrating an operation for bringing the developing unit 109 into contact with the photosensitive drum.
- the separation control member 196R moves in the direction of arrow W42
- the moving member 452R is pushed and moved.
- the moving member 452R swings in the direction of arrow BC around the support receiving part 452Ra, which is a round hole.
- the spacer 151R is pushed by the swinging moving member 452R and swings in the direction of arrow B2.
- the spacer 151R moves from the abutting surface 416c and enters the second regulating surface 416d, thereby removing the distance regulation between the photosensitive drum and the developing unit 109, and bringing the developing unit 409 into contact.
- FIG. 72(b) is a diagram in which the developing unit 109 is maintained in contact with the photosensitive drum.
- the separation control member 196R which has moved in the W42 direction in FIG. 72(a), has returned to the W41 direction again. Since the space 196Rd is set wide, the separation control member 196R and the moving member 452R do not come into contact with each other. The moving member 452R maintains the above-mentioned abutting state.
- FIG. 72(c) is a diagram illustrating the operation when separating the developing unit 109 again.
- the separation control member 196R further moves in the W41 direction from the state shown in FIG. 72(b)
- the separation control member 196R and the moving member 452R come into contact.
- the moving member 452R then swings in the direction of arrow BD and comes into contact with the developing cover member 428.
- the moving member 452R contacts the developing cover member 428 and is further rotated in the BD direction, the entire developing unit 109 swings and becomes separated.
- the moving member 452R and the spacer 151R are connected by a tension spring 153 and rotate in the direction of arrow B1.
- the rotated spacer 151R makes contact with the contact surface 416c, thereby regulating the developing unit 109 in a separated state. Thereafter, when the separation control member 196R moves in the W42 direction and returns to FIG. 71(d), the developing unit 109 maintains the separation state without being subjected to the force of the separation control member 196R.
- the movable member 425 including the first force receiving portions 452Rk, 452Lk and the second force receiving portions 452Rn, 452Ln is integrated with the developing unit 409 at the storage position (standby position) and the protruding position (operating position). It is configured to move between the two. Due to this movement, the first force receiving parts 452Rk and 452Lk are displaced at least in the direction VD1 (FIG. 40, etc.), the direction VD10 (FIG. 236, etc.), the direction VD12 (FIG. 238), and the direction VD14 (FIG. 239).
- the moving member that is the pressing member in the separation and contact mechanism of the process cartridge 430 operates without moving from the storage position (standby position) to the protrusion position (operating position) in the developing unit 109.
- the configuration will be explained using FIGS. 73 to 78.
- the configuration described here is such that when the process cartridge 430 is installed in the apparatus main body 170, the process cartridge 430 is retracted in a direction perpendicular to the installation direction and finally engages with the separation control member 196.
- FIG. 73(a) shows a side view of the process cartridge 430 in this configuration as viewed from the drive side.
- the supporting structure of the developing unit 439 is the same as that described in the first embodiment. That is, the cylindrical portion 428b of the developer cover member 428 is rotatably supported by the developer unit support hole 431Ra of the drive side cartridge cover member 431R.
- the developing unit support hole 431Ra has a cylindrical shape. Therefore, in this alternative embodiment, unlike the configuration of Embodiment 5, the developing unit 439 cannot move in the Z2 direction with respect to the drive side cartridge cover member (drum frame body) 431R and the drum unit 438, except for movement due to backlash. I can't.
- Compression coil springs are attached to the drive side cartridge cover member 431R at two locations.
- One is a first drive-side support spring 435R provided in the rotation determining recess 431KR of the drive-side cartridge cover member 431R.
- the spring 435R includes a tip portion 435Ra on its lower end side.
- the other is a second drive-side support spring 434R attached to the drive-side support spring attachment portion 431MR.
- the spring 434R includes a tip portion 434Ra on its lower end side.
- FIG. 73(b) shows a side view of the process cartridge 430 viewed from the non-driving side.
- the cartridge cover member 431L on the non-driving side rotatably supports the developing unit 409 as in FIG. 13 of the first embodiment.
- Compression coil springs (elastic members) are attached to the non-drive side cartridge cover member 431L at two locations.
- One is a first non-drive side support spring 435L provided in the rotation determining recess 431KL of the non-drive side cartridge cover member 431L.
- the spring 435L includes a tip portion 435La on its lower end side.
- the other is a second non-drive side support spring 434L attached to the non-drive side support spring attachment part 431ML.
- the spring 434L includes a tip portion 434La on its lower end side.
- tip portions 434Ra, 435Ra, 434La, and 435La are supported portions that contact and are supported by the tray 171.
- these tip portions 434Ra, 435Ra, 434La, and 435La allow the drive-side cartridge cover member 431R and the non-drive-side cartridge cover member 431L, which constitute a part of the drum frame (first frame), to be moved in the Z2 direction. It is also a supporting part.
- the developing unit 409 (or developing frame) (second frame) is supported by the drum frame. Therefore, it can be said that these tip portions 434Ra, 435Ra, 434La, and 435La support the developing unit 409 (or developing frame) movably in the Z2 direction via the drum frame.
- FIG. 74 the process cartridge 430 is being moved in the direction of arrow Z2 in order to be mounted on the tray 171. In this state, the process cartridge 430 is still movable in the Z2 direction and is not positioned on the tray 171.
- the first drive side support spring 435R provided on the drive side cartridge cover member 431R has a distal end portion 435Ra that is attached to the rotation determining convex portion (first spring support portion) 171KR of the tray 171. It is supported in contact with. Further, when the process cartridge 430 is advanced in the Z2 direction, the second driving side support spring 434R is supported by the tip portion 434Ra coming into contact with the spring receiving portion (second spring supporting portion) 471MR of the tray 171.
- the tip portion 435La of the first non-drive side support spring 435L is supported by contacting a not-illustrated rotation determining convex portion (third spring support portion) of the tray 17. Further, the tip end portion 434La of the second non-drive side support spring 434L is supported by coming into contact with a spring receiving portion (fourth spring support portion) (not shown) of the tray 17. [Operation when installing the process cartridge into the device body]
- FIGS. 75 to 78 show side views seen from the drive side.
- the non-drive side has the same configuration as the drive side and operates in the same way, so a description thereof will be omitted.
- FIG. 75 shows a state in which the process cartridge 430 placed on the tray 171 has moved along with the tray 171 in the direction of arrow X1.
- the tip portion 435Ra of the first drive side support spring 435R is in contact with the rotation determining convex portion 171KR of the tray 171.
- the tip portion 434Ra of the second drive side support spring 434R is in contact with the spring receiving portion 471MR of the tray 171.
- the first drive-side support spring 435R and the second drive-side support spring 434R support the drum frame and development frame portions of the process cartridge 430 against gravity by being supported by the tray 171.
- the circular arc 431VR which is the positioning portion provided on the drive-side cartridge cover member 431R of the process cartridge 430, does not contact the linear portions 171VR1 and 171VR2, which are the positioning portions of the tray 171, leaving a gap G4. That is, the process cartridge 430 is supported in the Z1 direction with respect to the positioning portion of the tray 171 by the first drive-side support spring 435R and the second drive-side support spring 434R.
- the moving member 452R can pass without colliding with the separation control member 196R. It can be said that the moving member 452R is in the storage position (standby position). At this time, the cartridge pressing mechanism 191 is in a standby state with a gap G5 between it and the top surface 431Rc of the drive side cartridge cover member 431R.
- FIG. 76 shows a state in which the cartridge pressing mechanism 191 moves in the direction of arrow Z2 in conjunction with closing the front door 11 and comes into contact with the top surface 431Rc of the drive side cartridge cover member 431R.
- the first drive-side support spring 435R and the second drive-side support spring 434R have not yet received any force from the cartridge pressing mechanism 191, and the process cartridge 430 has not moved.
- FIG. 77 shows a state in which the cartridge pressing mechanism 191 further moves in the Z2 direction and begins to press the top surface 431Rc of the drive side cartridge cover member 431R in the Z2 direction.
- the process cartridge 430 moves in the ZA direction, and the first drive-side support spring 435R and the second drive-side support spring 434R are compressed.
- the arc 431VR which is the positioning portion of the process cartridge 430 with the tray 171, approaches, but does not make contact with the straight portions 171VR1 and 171VR2 of the tray, leaving a gap G6.
- the moving member 452R enters the space 196Rd of the separation control member 196R due to the process cartridge 430 moving in the ZA direction.
- FIG. 78 shows a state in which the cartridge pressing mechanism 191 has further moved in the direction of arrow Z2 and the process cartridge 430 has been positioned on the tray 171.
- the process cartridge 430 moves in the ZA direction, and finally the arc 431VR contacts the straight portions 171VR1 and 171VR2 of the tray 171.
- the moving member 452R has entered the space 196Rd of the separation control member 196R to its final position due to the process cartridge 430 moving in the Z2 direction.
- the moving member 425R is in the protruding position (operating position). Therefore, by moving the separation control member 196R, the moving member 452R can be moved, and the contact state and the separation state of the process cartridge 430 can be switched.
- the ZA direction (the direction in which the moving member 425R moves from the standby position to the operating position) in which the process cartridge 430 moves by being pressed by the cartridge pressing mechanism 191 moving in the Z2 direction does not have to be parallel to the Z2 direction. That is, the ZA direction may include at least a component in a direction perpendicular to the X1 direction.
- the spring force (biasing force) of the first drive side support spring 435R and the second drive side support spring 434R is set to be smaller than the force of the cartridge pressing mechanism 191 in a state where the arc 431VR is in contact with the straight parts 171VR1 and 171VR2. There is. Therefore, the process cartridge 430 can be reliably positioned with respect to the tray 171.
- the movable member 425 including the first force receiving portions 452Rk, 452Lk and the second force receiving portions 452Rn, 452Ln is integrally placed in the storage position with the drum unit 438 and the developing unit 439 (drum frame body and developing frame body). (standby position) and a protruding position (operating position).
- the first force receiving parts 452Rk, 452Lk and the second force receiving parts 452Rn, 452Ln are moved in the direction VD1 (FIG. 40, etc.), the direction VD10 (FIG. 236, etc.), the direction VD12 (FIG. 238), and the direction VD14 (FIG. 239).
- VD1 FIG. 40, etc.
- the direction VD10 FIG. 236, etc.
- VD12 FIG. 238
- the direction VD14 FIG. 239).
- the process cartridge has a separation contact mechanism 1450R on the drive side and a separation contact mechanism 1450L on the non-drive side (FIG. 79).
- FIG. 80 shows an assembled perspective view of the drive side of the developing unit 1409 including the separation and contact mechanism 1450R.
- FIG. 81 shows an assembled perspective view of the non-drive side of the developing unit 1409 including the separation and contact mechanism 550L.
- the separation and contact mechanism 1450R includes a spacer 1451R that is a regulating member (holding member), a moving member 1452R that is a pressing member, and a tension spring 1453.
- the spacer 1451R includes an annular supported portion 1451Ra, a contact surface (contact portion) 1451Rc that contacts the abutted surface (contacted portion) 1416c of the cartridge cover 1416, and a spring hook portion 1451Rg that engages with the tension spring 1453. , has a second pressed surface 1451Re that engages with the moving member 1452R. Further, it is rotatably held by a first support portion 1428c of the developer cover member 1428.
- the other configurations are the same as those of the first embodiment described above.
- the movable member 1452R is rotatably held by a support receiving portion 1452Ra of the movable member 1452R engaged with a third support portion 1428m of the developing cover member 1428. Furthermore, the moving member 1452R has a first force receiving surface 1452Rm and a second force receiving surface 1452Rp that can be engaged with the separation control member 196R installed on the device main body 170, and a spring hook portion 1452Rs that engages with the tension spring 1453. , has a second pressing surface 1452Rr that engages with the spacer 1451R.
- first force receiving surface 1452Rm and the second force receiving surface 1452Rp are the first force receiving part (retreat force receiving part, separation force receiving part) and the second force receiving part (applying force receiving part), respectively, as in Example 1. (contact force applying section).
- the tension spring 1453 urges the spacer 1451R in the B1 direction with the first support portion 1428c of the developer cover member 1428 as the center of rotation. Furthermore, the moving member 1452R is urged in the CA direction with the third support portion 1428m of the developing cover member 1428 as the center of rotation.
- FIGS. 82 to 85 are cross-sectional views in which a part of the developing cover member 1428 is partially omitted for explanation.
- the development input coupling 132 receives a driving force from the image forming apparatus main body 170 in the direction of arrow V2 in FIG. 82, and the development roller 106 rotates. That is, the developing unit 1409 having the developing input coupling 132 receives torque in the direction of arrow V2 from the image forming apparatus main body 170.
- the developing unit 1409 receives this torque and the urging force by the developing pressure spring 134, which will be described later.
- the contact surface 1451Rc of the spacer 1451R contacts the contact surface 1416c of the drive-side cartridge cover member 1416, and the attitude of the developing unit 1409 is maintained at the separated position.
- the image forming apparatus main body 170 in this embodiment also includes a separation control member 196R corresponding to each process cartridge 1400 as described above.
- the separation control member 196R protrudes toward the process cartridge 1400 and has a first force-applying surface 196Ra and a second force-applying surface 196Rb that face each other with a space 196Rd in between.
- the first force applying surface 196Ra and the second force applying surface 196Rb are connected to each other via a connecting portion 196Rc on the lower surface side of the image forming apparatus main body 170.
- the separation control member 196R is rotatably supported by a control sheet metal (not shown) about a rotation center 196Re.
- the separation control member 196R is always urged in the E1 direction by an urging spring (not shown), and its rotational direction is regulated by a holder (not shown). Furthermore, the control sheet metal (not shown) is configured to be movable in the W41 and W42 directions from the home position by a control mechanism (not shown), so that the separation control member 196R is configured to be movable in the W41 and W42 directions.
- the separation control member 196R moves in the W42 direction
- the second force applying surface 196Ra of the separation control member 196R and the second force receiving surface 1452Rp of the moving member 1452R come into contact, and the moving member 1452R rotates around the support receiving part 1452Ra at CB. Rotate in the direction.
- the second pressing surface 1452Rr of the moving member 1452R contacts the second pressed surface 1451Re of the spacer 1451R, and rotates the spacer 1451R in the B2 direction.
- the spacer 1451R is rotated by the moving member 1452R to a separation release position (permissible position, second position) where the contact surface 1451Rc and the contact surface 1416c are separated, resulting in the state shown in FIG. 83.
- a separation release position transmisible position, second position
- the position of the separation control member 196R shown in FIG. 83 that moves the spacer 1451R to the separation release position is referred to as a first position.
- the spacer 1451R When the spacer 1451R is moved to the separation release position by the separation control member 196R in this manner, the development unit 1409 is rotated in the V2 direction by the torque received from the image forming apparatus main body 170 and the development pressure spring 134, and the development roller 106 and photosensitive drum 104 are rotated in the V2 direction. moves to the abutting position where it abuts (the state shown in FIG. 83). At this time, the spacer 1451R, which is biased in the direction of arrow B1 by the tension spring 1453, is maintained at the separation release position as the second restricted surface 1451Rk comes into contact with the second restricted surface 1416d of the drive side cartridge cover member 1416. .
- the separation control member 196R moves in the W41 direction and returns to the home position.
- the moving member 1452R is rotated in the CB direction by the tension spring 1453, and as shown in FIG. 84, the first pressing surface 1452Rq of the moving member 1452R and the first pressing surface 1428k of the developing cover member 1428 are in contact with each other. (See also Figure 80).
- the moving member 1452R can be rotated to move the spacer 1451R from the separation holding position to the separation release position. This allows the developing unit 1409 to move from the separated position to the abutting position where the developing roller 106 and the photosensitive drum 104 abut.
- the position of the separation control member 196R in FIG. 84 is the same as that in FIG. 82.
- FIGS. 84 and 85 are cross-sectional views in which a part of the developing cover member 1428 is partially omitted for explanation.
- the separation control member 196R in this embodiment is configured to be movable in the direction of arrow W41 in FIG. 84 from the home position.
- the separation control member 196R moves in the W41 direction
- the first force applying surface 196Rb and the first force receiving surface 1452Rm of the moving member 1452R come into contact with each other, and the moving member 1452R rotates in the CA direction about the support receiving part 1452Ra.
- the first pressing surface 1452Rq of the moving member 1452R comes into contact with the first pressing surface 1428k of the developing cover member 1428, so that the developing unit 1409 rotates from the contact position in the V1 direction (the state shown in FIG. 85).
- the spacer 1451R In the spacer 1451R, the second regulated surface 1451Rk of the spacer 1451R and the second regulated surface 1416d of the drive side cartridge cover member 1416 are separated, and the spacer 1451R rotates in the direction of arrow B1 by the urging force of the tension spring 1453. As a result, the spacer 1451R rotates until the second pressed surface 1451Re contacts the second pressing surface 1452Rr of the moving member 1452R, and upon contact, the spacer 1451R moves to the separation holding position.
- the developing unit 1409 When the developing unit 1409 is moved from the contact position to the separation position by the separation control member 196R and the spacer 1451R is located at the separation holding position, there is a gap between the contact surface 1451Rc and the contact surface 1416c as shown in FIG. A gap T5 is formed.
- the position shown in FIG. 85 where the developing unit 1409 is rotated from the contact position toward the separation position and the spacer 1451R can be moved to the separation holding position is referred to as the second position of the separation control member 196R.
- the spacer 1451R maintains the separation holding position and the developing unit 1409 responds to the torque received from the image forming apparatus main body 170. It is rotated in the direction of arrow V2 by the developing pressure spring 134, and the abutting surface 1451Rc and the abutted surface 1416c abut. That is, the developing unit 1409 is kept in a separated position by the spacer 1451R, and the developing roller 106 and the photosensitive drum 104 are separated (the state shown in FIGS. 82 and 79).
- gaps T3 and T4 are thereby formed, and the separation control member 196R is located at a position where it does not act on the moving member 1452R (state in FIG. 82). Note that the transition from the state shown in FIG. 85 to the state shown in FIG. 82 is executed immediately.
- the separation control member 196R moves from the home position to the second position, the spacer 1451R moves from the separation release position to the separation holding position.
- the separation control member 196R returns from the second position to the home position, the developing unit 1409 is maintained at the separation position by the spacer 1451R.
- FIGS. 86 to 101 the engagement between the separation abutment mechanism 1450R of the process cartridge 1400 and the development separation control unit 196R of the image forming apparatus main body 170 when the process cartridge 1400 is attached to and removed from the image forming apparatus main body 170 The operation will be explained. Note that these figures are cross-sectional views in which a part of the developing cover member 1428 is partially omitted for the purpose of explanation.
- 86 to 89 are views of the process cartridge 1400 seen from the drive side while the cartridge tray 171 is being inserted from the outside of the image forming apparatus main body 170 to the position where image formation is possible. Further, components other than the process cartridge 1400 and the separation control member 196R are omitted. 94 to 97 are views of the process cartridge 1400 viewed from the non-driving side at the same point in time as FIGS. 86 to 89.
- FIGS. 90 to 92 are diagrams after the tray 171 is inserted until the process cartridge 1400 is held apart by the initial operation of the image forming apparatus, which will be described later.
- FIG. 93 is a view from the drive side of the process cartridge 1400, with parts other than the process cartridge 1400 and the separation control member 196R being omitted while the cartridge tray 171 is being pulled out from the image forming position to the outside of the image forming apparatus main body 170.
- 98 to 101 are views of the process cartridge 1400 viewed from the non-driving side at the same point in time as FIGS. 90 to 92.
- the image forming apparatus main body 170 performs image formation by mounting a plurality of process cartridges 1400, there are separation control members 196R corresponding to the number of process cartridges 1400. Therefore, in this embodiment, for convenience, a number is added to the end of the separation control member 196R (196L) to distinguish between the plurality of separation control members 196R (196L).
- the force exerted by the tension spring 1453 is set to be weaker than the force exerted by an urging spring (not shown) that urges the separation control member 196R in the E1 direction, and when the moving member 1452R and the separation control member 196R come into contact, the moving member 1452R is configured to rotate and escape. Further, the moving member 1452R and the spacer 1451R are configured to rotate in the B2 direction (direction from the separation holding position to the separation release position) and in the CB direction more than in the state shown in FIG.
- the second force receiving surface 1452Rp of the moving member 1452R is placed on the upper surface 196R-1q of the separation control member 196R-1. Therefore, the moving member 1452R moves from the separation holding position to the separation release position, and the process cartridge 1400 shifts from the separation state to the contact state.
- the separation control member 196R-2 When the tray 171 (not shown) is further inserted from this state, it comes into contact with the separation control member 196R-2 next to the separation control member 196R-1 as shown in FIG. Like the separation control member 196R-1, the separation control member 196R-2 is inserted while contacting the upstream side surface 196R-1p and the upper surface 196R-2q in the insertion direction. At this time, the process cartridge 1400 remains in contact. Even after passing the separation control member 196R-1, the process cartridge 1400 remains in contact.
- the moving member 1452R and the spacer 1451R rotate more greatly in the B2 direction (direction from the separation holding position to the separation release position) and in the CB direction, compared to before contacting the upper surface 196R-2q. Pass through 196R-2q. Therefore, after passing the upper surface 196R-2q, the moving member 1452R and the spacer 1451R rotate slightly in the B1 direction and the CA direction while maintaining the contact state of the process cartridge 1400. The same applies when passing through the other two separation control members 196R-3 and 196R-4.
- FIG. 89 shows the tray 171 (not shown) inserted to the position where an image can be formed.
- the second force receiving surface 1452Rp of the moving member 1452R rests on the upper surface 196R-2s of the separation control member 196R.
- the process cartridge 1400 cannot be brought into contact or separated.
- the image forming apparatus main body 170 executes an initial operation after closing the front door and before forming an image (printing on a recording medium such as paper).
- the separation control member 196R performs the above-described contact operation and separation operation (operation in the W41 and W42 directions).
- the second force-receiving surface 1452Rp of the moving member 1452R and the first force-applying surface 196Ra of the separation control member 196R come into contact by entering the contact operation (movement in the W42 direction).
- the second force applying surface 196Rb of the separation control member 196R comes into contact with the first force receiving surface 1452Rm of the moving member 1452R, as shown in FIG. direction until the spacer 1451R contacts the moving member 1452R.
- the separation control member 196R returns to the home position in this state, it becomes possible to hold the process cartridge 1400 apart as shown in FIG. 82, and the same image processing operation as in the embodiment described above becomes possible.
- the developing unit 1409 is configured such that the developing roller 106 is farther away from the photosensitive drum 104 than in the state shown in FIG.
- the process cartridge 1400 is pulled out while the first force receiving surface 1452Rm of the moving member 1452R contacts the upper surface 196R-2r of the separation control member 196R.
- the process cartridge 1400 is pulled out from the image forming apparatus main body 170
- the developing unit 1409 is pulled out while being separated.
- the tray 171 (not shown) is pulled out to the outside of the image forming apparatus main body 170
- the process cartridge 1400 is in the same state as the separated process cartridge 1400 shown in FIG. In this way, even if the developing unit 1409 rotates in the V1 direction by contacting the separation control member 196R, the process cartridge 1400 remains separated.
- the second force receiving surface 1452Rp was made movable relative to the drum unit.
- the first force receiving surface 1452Rm and the second force receiving surface 1452Rp are moved in the direction VD1 (FIG. 40, etc.), the direction VD10 (FIG. 236, etc.), the direction VD12 (FIG. 238), and the direction VD14 (FIG. 239).
- the first force receiver is The surface 1452Rm and the second force receiving surface 1452Rp can be displaced in these directions. Further, when the tray 171 is extracted from the image forming apparatus main body 170 and the process cartridge 1400 is taken out, the first force receiving surface 1452Rm and the second force receiving surface 1452Rp are displaced in these directions while maintaining the separated state of the developing unit. be able to.
- the moving member 1452R especially the first force receiving surface 1452Rm and the second force receiving surface 1452Rp
- the apparatus main body 170 especially the separation control member 196L
- Example 7 of the present invention will be described using FIGS. 102 to 115.
- the process cartridge 1600 has a separation and contact mechanism 1650R on the drive side and a separation and contact mechanism 1650L on the non-drive side.
- the spacing and abutment mechanisms first the details of the drive side spacing and abutment mechanism 150R will be explained, and then the non-drive side spacing and abutment mechanism 150L will be explained. Furthermore, since the spacing and contact mechanism has almost the same function on the driving side and the non-driving side, R is attached to the reference numeral of each member on the driving side. On the non-drive side, each member is given the same reference numeral as the drive side, and is designated with L.
- FIG. 102 shows an assembled perspective view of the drive side of the developing unit 1609 including the separation and contact mechanism 1650R.
- the separation and contact mechanism 1650R includes a spacer 151R that is a regulating member, a moving member 1652R that is a pressing member, and a tension spring 153. Further, as shown in FIGS. 103 and 106, the moving member 1652R has a first force receiving part (retreat force receiving part, separation force receiving part) 1652Rk and a second force receiving part (applying force receiving part) 1652Rk, as in the first embodiment. Contact force receiving part) 1652Rn.
- the movable member 1652R has a rack portion 1652Rx, and is supported so as to be capable of linear movement and rotation by engaging the outer diameter of the second support portion 1628k of the developing cover member 1628 and the inner wall of the oblong support receiving portion 1652Ra (FIG. 103). reference).
- the rack portion 1652Rx is configured to engage with the gear portion 1632-15b of the moving member drive gear 1632-15 and to be movable in conjunction with the rotation of the moving member drive gear 1632-15.
- the moving member drive gear 1632-15 is configured as a part of the development drive input gear unit 1632-1.
- the inner diameter of the cylindrical portion 1628b of the developing cover member 1628 and the outer diameter of the cylindrical portion 1632-11b of the developing coupling gear 1632-11 fit together, and in addition, the driving side bearing 1626 is supported.
- the portion 1626a and a cylindrical portion (not shown) of the transmission gear 1632-16 it is configured to transmit driving force to various gears.
- the first support portion 1628c of the developing cover member 1628 engages with the inner diameter of the support receiving portion 151Ra of the spacer 151R, so that the spacer 151R is rotatably supported, and is connected to the moving member 1652R by the tension spring 153.
- the spacers 151R are urged to attract each other. Further, by fitting the outer diameter of the cylindrical portion 1628b of the developing cover member 1628 into the developing unit support hole 1616a of the drive-side cartridge cover member 1616, the developing unit 1609 can be rotated about the swing axis K. Supported.
- FIG. 103 shows the drive-side cartridge cover member 1616, the developer cover member 1628, and the developer drive when the process cartridge 1600 is installed in a cartridge tray (not shown) of the image forming apparatus main body 170 and the cartridge tray 1161 is inserted into the first installation position. It is a diagram seen from the non-driving side of the process cartridge 1600, with components other than the input gear unit 1632-1, the moving member 1652R, and the spacer 151R omitted. In this state, the moving member 1652R is in the standby position.
- the front door 11 of the image forming apparatus main body 170 shifts from the open state to the closed state, and the main body side developer drive coupling 185 moves to connect the developer coupling (rotation drive force receiving part) 1632-11.
- the developer coupling 1632-11 is rotated by the driving force of the main body and the developer drive input gear unit 1632-1 is rotated in the direction of arrow D1
- the movable member drive gear 1632-15 is rotated in the direction of arrow D1. Rotate in the direction.
- the rack portion 1652Rx of the moving member 1652R is engaged with the gear portion 1632-15b of the moving member driving gear 1632-15, so it protrudes downward in the direction of arrow Z2 (state in FIG. 104).
- the movable member 1652R is urged by the tension spring 153 substantially parallel to the arrow Z1 direction, so the terminal end 1652Ry of the rack portion 1652Rx and the gear portion 1632-15b of the movable member drive gear 1632-15 are intermittently in contact with each other.
- the rotation of the movable member drive gear 1632-15 is stopped by the internal mechanism of the development drive input gear unit 1632-1, which will be described later, and the movable member 1652R is stopped at the protruding position (operating position).
- the moving member 1652R moves to the protruding position (operating position) where the protrusion 1652Rh enters between the first force applying surface 196Ra and the second force applying surface 196Rb of the separation control member 196R, as shown in FIG.
- a gap exists between the protrusion 1652Rh and the first force applying surface 196Ra and the second force applying surface 196Rb.
- the moving member 1652R moves in the Z2 direction (predetermined direction) and moves from the standby position to the operating position when the developing coupling 1632-11 receives the driving force.
- the separation and contact mechanism 1650R is composed of a spacer 151R, a moving member 1652R, and a tension spring 153. As shown in FIG. 105, when the separation control member 196R moves from the home position to the first position, the moving member 1652R rotates in the direction of arrow BB around the second support portion 1628k of the developer cover member 1628.
- the spacer 151R also rotates in the direction of arrow B2, thereby moving the developing unit 1609 to the contact position.
- the separation control member 196R moves in the W41 direction and returns to the home position
- the movable member 1652R is rotated in the direction of the arrow BA by an unillustrated biasing member, and the separation control member 196R is controlled in the same manner as in the first embodiment. It moves from member 196R to a position where it is not acted upon.
- the tension spring 153 may be used as the biasing member (not shown) as in the first embodiment.
- the movable member 1652R further rotates in the direction of arrow BA from the state shown in FIG.
- the developing unit 109 rotates from the contact position to the separated position.
- the rack portion 1652Rx contacts and meshes with the gear portion 1632-15b of the moving member drive gear 1632-15 (the state shown in FIG. 107).
- the drive input gear unit 1632-1 includes a developer coupling gear 1632-11, a compression spring 1632-12, a clutch plate 1632-13, a torque limiter 1632-14, a moving member drive gear 1632-15, and a transmission gear. Consisting of 1632-16. Note that only the gear portion 1632-15b of the moving member driving gear 1632-15 is shown in detail, and the tooth shapes of the other gears are omitted.
- the development coupling gear 1632-11 includes a coupling portion (development coupling member) 1632-11a that engages with the main body side development drive coupling 185, and a development roller drive gear 1632-11c that engages with the development roller gear 131. It is arranged through the aforementioned cylindrical portion 1632-11b. Furthermore, the developing coupling gear 1632-11 is arranged on a side opposite to the side where the coupling portion 1632-11a is arranged so as to engage with the plurality of first protrusions 1632-13a of the clutch plate 1632-13 and transmit drive. It has a protruding portion 1632-11d that protrudes from.
- a drive shaft 1632-11e that transmits driving force to the transmission gear 1632-16 is disposed to extend in the same direction as the protruding portion 1632-11d, and is configured to drive the cylindrical portion 1632-11b and the developing roller.
- a storage space 1632-11f is formed inside the gear 1632-11c.
- the clutch plate 1632-13 has a second protrusion 1632-13c protruding through a flange 1632-13b on the opposite side to the side where the first protrusion 1632-11a is disposed, and a recess 1632-14a of the torque limiter. is arranged so that it can be engaged with.
- the torque limiter 1632-14 has a protrusion 1632-14b that protrudes on the side opposite to the side where the recess 1632-14a is disposed, and is arranged to be able to engage with the recess 1632-15a of the moving member drive gear 1632-15.
- Clutch plate 1632-13 and torque limiter 1632-14 are configured to always rotate together. In other words, these may be integrally molded.
- the transmission gear 1632-16 has a recess 1632-16a that engages with a drive shaft 1632-11e extending from the developer coupling gear 1632-11, and is configured to always rotate in conjunction with the developer coupling gear 1632-11. There is.
- a conveyance roller drive gear 1632-16b that engages with the toner conveyance roller gear 133 (see FIG. 102) and an agitation drive gear 1632-16c that engages with an agitation gear that drives a toner agitation unit (not shown) are arranged.
- the compression spring 1632-12 is disposed within the storage space 1632-11f of the developer coupling gear 1632-11 and between the clutch plate 1632-13, and moves the developer coupling gear 1632-11 in the arrow Y2 direction. 13 in the direction of arrow Y1.
- FIG. 109(a) is a schematic cross-sectional view of the drive input gear unit 1632-1 when the process cartridge 1600 is mounted on the cartridge tray 1161 and the cartridge tray 1161 is inserted into the first mounting position.
- the protrusion 1632-11d of the developer coupling gear 1632-11 and the first protrusion 1632-13a of the clutch plate 1632-13 are connected to the compression spring 1632-12. They do not mesh due to the biasing force, and the rotational driving force of the developing coupling gear 1632-11 is not transmitted to the clutch plate.
- the transmission gear 1632-16 is connected to the connecting shaft 1632-11e of the developer coupling gear 1632-11 through a recess 1632-16a, and the rotational driving force of the developer coupling gear 1632-11 is transmitted to the transmission gear 1632-16. becomes. Thereafter, in conjunction with the transition of the front door 11 of the image forming apparatus main body 170 from the open state to the closed state, the main body side developer drive coupling 185 moves in the direction of arrow Y1.
- the spring force of the compression spring 1632-12 to be smaller than the pressing force of the main body side developer drive coupling 185, the developer drive input gear 1632-11 moves in the direction of arrow Y1.
- the moving member 1652R When moving to a predetermined protruding position, the moving member 1652R receives a predetermined biasing force FT by the tension spring 153 (see FIG. 104).
- the set value of the torque at which the torque limiter 1632-14 idles without transmitting rotational driving force is determined by the drive input gear unit 1632-1 generated by the biasing force FT of the tension spring when the moving member 1652R is in the protruding position. Set it to be equal to the load torque generated at the center.
- the moving member drive gear 1632-15 is in an independent state where it does not rotate integrally with the other gears of the drive input gear unit 1632-1.
- the rack portion 1652Rx of the movable member 652R is engaged with the independent movable member drive gear 1632-15, so that it can be moved substantially parallel to the direction of arrow Z1 in FIG. 104 by the biasing force of the tension spring 153.
- the movable member 1652R does not protrude from the developing unit 1609 and is located at the stored position (standby position) (state in FIG. 103).
- FIG. 110 is a schematic cross-sectional view of a developing drive input gear 1632-2 in which various functional parts of the developing drive input gear unit 1632-1 are integrally molded.
- 1632-16c are respectively a coupling part 1632-2a, a cylindrical part 1632-2b, a developing roller drive gear 1632-2c, a moving member drive gear 1632-2d, a conveyance roller drive gear 1632-2e, and an agitation drive gear 1632-2f. It is integrated.
- backlash in the developer drive input gear 1632-2, the main body side developer coupling 185, and a plurality of gears (not shown) that drive the other main body side developer couplings 185 moves the movable member 1652R to the storage position. It may be configured to move. Note that even in the configuration using the torque limiter 1632-14 described above, a configuration may be adopted in which the torque limiter 1632-14 is moved to the storage position by backlash.
- a mechanism for moving the moving member 1652R between the protruding position and the storage position is provided on a drive shaft (same as the swing axis K) that transmits rotational driving force from the image forming apparatus main body 170 to the developing unit 1609.
- a moving member drive gear 1632-15 is provided to drive the moving member 1652R, the present invention is not limited to this.
- FIG. 111 An example is shown in FIG. 111.
- FIGS. 111(a) and 111(b) show the driving side cartridge cover member 1616, developer cover member 1628, developer coupling gear 1632-11, and moving member drive gear unit 1652R when the moving member 1632R-3 is located in the storage position.
- the moving member driving gear unit 1632-3 is configured such that a moving member driving gear 1632-33 is disposed via a first intermediate gear 1632-31 and a second intermediate gear 1632-32. Note that the moving member drive gear 1632-33 is arranged to engage with the rack portion 1652Rx-3 of the moving member 1652R-3.
- the member drive gear 1632-33 rotates and moves the moving member drive 1652R-3 to the protruding position (see FIG. 111(b)). Furthermore, the movement from the protruding position to the storage position is the same as described above. As explained above, the moving member drive gear that moves the moving member does not need to be arranged on the swing axis K.
- the developing roller drive gear 1632-11c (1632-2c) and the moving member drive gear 1632-15 (1632- 2d), a conveyance roller drive gear 1632-16b (1632-2e), and an agitation drive gear 1632-16c (1632-2f) are arranged, but the arrangement of various gears is not limited to this, and the number of gear teeth and The tooth profile shape is not limited to this either. Further, various gears may share a function, for example, the developing roller driving gear 1632-2c has the function of the moving member driving gear 1632-2d, and the rack portion 1652Rx of the moving member 1652R is provided with the developing roller driving gear 1632-2c. The moving member 1652R may be moved by engaging with the moving member 1652R.
- the separation and contact mechanism 1650L on the non-drive side of the process cartridge 1600 in this embodiment will be described with reference to FIGS. 112 and 113.
- the separation and contact mechanism 1650L includes a spacer 151L that is a regulating member, a moving member 1652L that is a pressing member, and a tension spring 153 (see FIG. 112).
- the moving member 1652L has a rack portion 1652Lx, and is supported by a non-drive side bearing 1627 so as to be capable of linear movement and rotation.
- the rack portion 1652Lx is configured to engage with the non-drive side moving member drive gear 1635 and to be movable in conjunction with the rotation of the non-drive side moving member drive gear 1635.
- the non-drive side moving member drive gear 1635 is connected to a through shaft 1636 (see FIG. 113), and the through shaft 1636 is connected to the development drive input gear unit 1632-1 via a through shaft gear (not shown).
- the through shaft 1636 rotates in conjunction with this, and the non-drive side moving member drive gear 1635 rotates.
- the moving member 1652L moves. Note that as long as the through shaft 1636 has a shaft that communicates between the drive side and the non-drive side of the process cartridge 1600, for example, the toner conveying roller 1016 or the developing roller 106 may be used. good.
- the separation and contact mechanism in this embodiment may be arranged only on one side of the process cartridge 1600, similar to the second embodiment.
- 114 and 115 are perspective views of the process cartridge 1600 in a state in which the moving member 1652 has protruded to the protruding position by receiving rotational driving force from the main body side developer coupling 185, but FIG. A contact mechanism 1650R is arranged, and FIG. 115 shows a configuration in which a separation contact mechanism 1650L is arranged only on the non-drive side.
- the moving member 1652R is moved by inputting a driving force to the coupling portion (coupling member) 1632-11a and rotating it.
- the first force receiving part (retreat force receiving part, separation force receiving part) 1652Rk and the second force receiving part (contact force receiving part) 1652Rn are moved between the storage position (standby position) and the protruding position. (operating position).
- Example 8 will be described using FIGS. 116 to 128.
- the process cartridge 1900 has a separation contact mechanism 1950R (see FIG. 116) on the drive side and a separation contact mechanism 1950L (see FIG. 126) on the non-drive side.
- a separation contact mechanism 1950R see FIG. 116
- a separation contact mechanism 1950L see FIG. 126
- the spacing and abutment mechanisms first, the details of the drive side spacing and abutment mechanism 1950R will be explained, and then the non-drive side spacing and abutment mechanism 1950L will be explained.
- R is added to the code of each member on the drive side, and the code of each member on the non-drive side is changed to drive. Add L to make it the same as the side.
- a moving member 1952R corresponding to the moving member 152R in Embodiment 1 moves in the longitudinal direction with respect to the separation control member 196R during the process of inserting and removing the process cartridge 1900 into and from the image forming apparatus main body 170, as shown in FIG. It is configured to avoid the collision in the direction of arrow Y2. Further, when the mounting is completed, the movable member 1952R is at the same longitudinal position as the separation control member 196R, and the contact and separation operations are possible as in the first embodiment. The insertion and removal of the moving member while avoiding the separation control member 196R will be described later. [Drive side process cartridge configuration]
- FIG. 116 shows an assembled perspective view of the drive side of the developing unit 1909 including the separation and contact mechanism 1950R.
- the separation and contact mechanism 1950R includes a spacer 1951R that is a regulating member (holding member), a moving member 1952R that is a pressing member, and a tension spring 1953.
- the moving member 1952R has a first oblong hole 1952Rx and a second oblong hole 1952Ry (see FIG. 117(c)), and has an outer diameter of the second support portion 1928k of the developing cover member 1928 and a first It engages with the inner walls of the elongated hole 1952Rx and the second elongated hole 1952Ry, and is supported so as to be swingable about two swing shafts to be described later.
- the inner diameter of the support receiving part 1951Ra of the spacer 1951R is engaged with the first support part 1928c of the developing cover member 1928, and the spacer 1951R is rotatably supported, and the moving member is supported by the tension spring 1953. 1952R and spacer 1951R are urged to attract each other. Further, by fitting the outer diameter of the cylindrical portion 1928b of the developing cover member 1928 into the developing unit support hole 1916a of the drive side cartridge cover member 1916, the developing unit 1909 can be rotated about the swing axis K. Supported. [Explanation of configuration and operation of moving member]
- FIG. 117(a) is a front view of the moving member 1952R as viewed from the longitudinal direction of the process cartridge 1900 (in the direction of arrow Y1 in FIG. 116), and FIGS. 117(b) and 117(c) are the moving member 1952R as a single item.
- FIG. The moving member 1952R has a first oblong hole 1952Rx and a second oblong hole 1952Ry each having an oblong hole shape.
- the longitudinal direction LH of the oblong hole shape of the first oblong hole 1952Rx and the second oblong hole 1952Ry is the same, and the upward direction (approximately Z1 direction) is indicated by arrow LH1, and the downward direction (approximately Z2 direction) is indicated by arrow LH2. shall be.
- an axis that is perpendicular to the LH direction and perpendicular to the depth direction (Y1 direction) of the oblong hole forming the first oblong hole 1952Rx is defined as an axis HXR.
- the moving member 1952R has a cylindrical surface 1952Rz centered on the axis HXR.
- the Y1 direction is parallel to the rotational axis M2 of the developing roller 106 and the rotational axis M1 of the photosensitive drum 104 described in the first embodiment.
- the first oblong hole 1952Rx and the second oblong hole 1952Ry are arranged with the same apex in the direction of arrow LH1.
- the first oblong hole 1952Rx and the second oblong hole 1952Ry communicate with each other, and the diameter of the first oblong hole 1952Rx is set larger than that of the second oblong hole 1952Ry.
- the length of the first oblong hole 1952Rx is set longer than the length of the second oblong hole 1952Ry.
- the moving member 1952R has a protrusion 1952Rh formed on the downstream side of the first oblong hole 1952Rx in the direction of arrow LH2.
- a first force receiving surface 1952Rm and a second force receiving surface 1952Rp each having an arc shape are arranged on the protrusion 1952Rh.
- the first force receiving surface 1952Rm and the second force receiving surface 1952Rp are the first force receiving part (retreat force receiving part, separation force receiving part) and the second force receiving part (applying force receiving part), respectively, as in Example 1. (contact force applying section).
- the moving member 1952R has an arc-shaped pushed surface 1952Rf on the downstream side in the direction of arrow LH1.
- the moving member 1952R has a spring hook 1952Rs to which the tension spring 1953 is attached, a first pressing surface 1952Rq, and a second pressing surface 1952Rr, as in the first embodiment.
- FIG. 118(a) is a perspective view showing only the developing cover member 1928
- FIG. 118(b) is a perspective view showing the developing cover member 1928 and the moving member 1952R.
- the second support portion 1928k of the developing cover member 1928 is formed of a first cylindrical portion 1928kb, a second swinging portion 1928ka having a spherical surface, and a second cylindrical portion 1928kc having a smaller diameter than the first cylindrical portion 1928kb.
- the axis passing through the centers of the first cylindrical portion 1923kb and the second cylindrical portion 1928kc is defined as HYR.
- the axis that is perpendicular to this HYR and passes through the center of the spherical surface of the second swinging portion 1928ka is the same as the above-mentioned HXR.
- the second swinging portion 1928ka has a spherical surface, but the moving member 1952R, which will be described later, swings in the directions of arrows YA and YB (see FIG. 119) and in the directions of arrows BA and BB (see FIG. 119). It is not limited to this, as long as it is a surface that is set within a range that does not interfere with the environment.
- first oblong hole 1952Rx and the second oblong hole 1952Ry of the moving member 1952R are similarly aligned in the arrow YA, YB direction and the arrow BA, BB direction with respect to the first cylindrical portion 1928kb and the second cylindrical portion 1928kc.
- the diameter of the oblong hole and the positional relationship in the LH direction are not limited to these, as long as they are set within a range that does not impede the swinging of the hole.
- FIG. 119 shows a state in which the separating and abutting mechanism 1950R is assembled to the developing cover member 1928.
- FIG. 119(a) is a view of the process cartridge 1900 viewed from the longitudinal direction (in the direction of arrow Y2 in FIG. 116).
- the longitudinal direction of the process cartridge 1900 is parallel to the rotational axes M1, M2, and K described in the previous embodiment.
- the movable member 1952R is supported by the second support portion 1928k of the developer cover member 1928 so as to be swingable around HYR in the directions of arrows BA and BB, similarly to the first embodiment.
- a cross section cut along a straight line passing through the center (HYR) of the second support portion 1928k and parallel to the LH direction described above is shown as a QQ cross section in FIG. 119(b).
- the moving member 1952R is subjected to a force in the F1 direction by the tension spring 1953 in a state where the second swinging portion 1928ka and the inner wall of the first oblong hole 1952Rx are in contact with each other.
- the spring hanging part 1952Rs of the moving member 1952R is located in the Y2 direction from the contact point between the second swinging part 1928ka and the first oblong hole 1952Rx, the spring force causes the spring hanging part 1952Rs to move in the arrow YA direction about the axis HXR.
- a moment is generated and it swings around axis HXR.
- the moving member 1952R that has swung in the direction of the arrow YA determines its posture by contacting the moving member regulating portion 1928s of the developing cover member 1928, and the protruding portion 1952Rh protrudes in the Y2 direction. This position is the standby position of the moving member 1952R.
- the pushing amount in the ZA direction is determined by the amount of movement in the ZA direction of the cartridge pressing unit 191 included in the image forming apparatus main body 170 (not shown).
- the cylindrical surface 1952Rz contacts a restriction surface 1926d (see FIG. 116) of the drive side bearing 1926 (not shown). It is arranged like this.
- the contact between the second cylindrical portion 1928kc and the second oblong hole 1952Ry has a similar rotation regulating effect.
- the moving member 1952R is supported so as to be swingable in two directions around the axis HYR and the axis HXR. [Installing the process cartridge into the image forming apparatus main body]
- FIG. 120 shows the process cartridge 1900, the cartridge pressing unit 191, and the separation control member when the process cartridge 1900 is mounted on the cartridge tray 171 (not shown) of the image forming apparatus main body 170 and the cartridge tray 171 is inserted into the first mounting position.
- 120(b) is a view of the image forming apparatus M as seen from the front door side (FIG. 120(a)) and a view of the process cartridge 1900 as seen from the drive side (FIG. 120(b)), with parts other than 196R omitted.
- the protruding portion 1952Rh of the moving member 1952R is located at the standby position where it is swung in the YA direction as described above when the cartridge tray 171 is inserted into the first mounting position.
- the moving member 1952R is arranged so that the protrusion 1952Rh fits into the space 196Rd of the separation control member 196R when viewed from the drive side of the process cartridge 1900, as shown in FIG. 120(b). .
- the cartridge pressing unit 191 descends in the direction of arrow ZA, and the first force applying portion 191a moves. It comes into contact with the pushed surface 1952Rf of the member 1952R. Thereafter, when the cartridge pressing unit 191 descends to a predetermined position, which is the second mounting position, the protrusion 1952Rh of the moving member 1952R swings in the YB direction by the swing mechanism described above, and reaches the operating position (the state shown in FIG. 121). ).
- the first force applying surface 196Ra of the separation control member 196R and the first force receiving surface 1952Rp of the moving member 1952R face each other, and the second force applying surface 196Rb and the second force receiving surface 1952Rm is opposite. That is, in the directions of arrows Y1 and Y2, the protrusion 1952Rh of the moving member 1952R and a part of the separation control member 196R are arranged to overlap.
- the contact/separation operation in this example is the same as in Example 1, as shown below.
- FIG. 122 shows a state in which the developing unit 1909 is located at the separated position.
- the separation control member 196R moves in the W42 direction from this state
- the second force applying surface 196Ra of the separation control member 196R and the second force receiving surface 1952Rp of the moving member 1952R come into contact with each other, and the moving member 1952R rotates at BB with HYR as the center of rotation. swing in the direction.
- the second pressing surface 1952Rr of the moving member 1952R contacts the second pressed surface 1951Re of the spacer 1951R, and rotates the spacer 1951R in the B2 direction.
- the spacer 1951R is rotated by the moving member 1952R to a separation release position (second position) where the abutting surface (abutting portion) 1951Rc (not shown) and the abutted surface (non-abutting portion) 116c are separated.
- the separation control member 196R moves in the W41 direction and returns to the home position (state in FIG. 124).
- the first force applying surface 196Rb and the first force receiving surface 1952Rm come into contact with each other, and the first pressing surface 1952Rq of the moving member 1952R contacts the first force applying surface 196Rb and the first force receiving surface 1952Rm.
- the developing unit 109 rotates from the contact position in the direction of arrow V1 about the swing axis K (the state shown in FIG. 125).
- FIG. 126 shows an assembled perspective view of the non-drive side of the developing unit 1909 including the separation and contact mechanism 1950L. Similar to the drive-side separation and contact mechanism 1950R described above, the separation and contact mechanism 1950L includes a spacer 1951L that is a regulating member, a moving member 1952L that is a pressing member, and a tension spring 1953.
- the moving member 1952L has a first oblong hole 1952Lx and a second oblong hole 1952Ly (not shown), and has an outer diameter of the second support portion 1927e of the non-drive side bearing 1927, a first oblong hole 1952Lx, and a second oblong hole 1952Ly. It fits with the inner wall of the double oblong hole 1952Ly. In addition, it is supported so as to be swingable about two swing axes, the shaft HXRL and the shaft HYRL.
- the inner diameter of the support receiving part 1951La of the spacer 1951L is engaged with the first support part 1927b of the non-drive side bearing 1927, and the spacer 1951L is rotatably supported and moved by the tension spring 1953.
- the member 1952R and the spacer 1951L are biased toward each other.
- the outer diameter of the cylindrical portion 1927a of the non-driving side bearing 1927 is fitted into the developing unit support hole 1917a of the non-driving side cartridge cover member 1917, so that the developing unit 1909 rotates about the swing axis K. Possibly supported.
- the operation of bringing the photosensitive drum 104 into contact with the developing roller 106 and the operation of separating the photosensitive drum 104 and the developing roller 106 by the separation and contact mechanism 1950L are similar to those of the drive-side separation and contact mechanism 1950R described above.
- FIG. 127 shows a configuration in which a separation contact mechanism 1950R is arranged only on the drive side
- FIG. 128 shows a configuration in which a separation contact mechanism 1950L is arranged only on the non-drive side.
- the amount of separation needs to be set appropriately within a range that does not affect the image.
- the protrusion 1952Rh having the surface 1952Rp is movable in the YA direction.
- the protrusion 1952Rh, the first force receiving surface 1952Rm, and the second force receiving surface 1952Rp are displaced at least in the Y2 direction (direction parallel to the rotational axis M1 and the rotational axis M2 in the first embodiment).
- the protrusion 1952Rh especially the first force receiving surface 1952Rm and the second force receiving surface 1952Rp, is connected to the apparatus main body 170, especially the separation control member 196R. This is to avoid interference that would prevent insertion or removal.
- the amount of movement of the protruding part 1952Rh in the pressing direction (ZA direction) of the pressing unit 191 is small. Therefore, the amount of movement of the pressing unit 191 required to move the protruding portion 1952Rh from the standby position to the operating position can be set to be small, and further miniaturization of the image forming apparatus main body 170 can be realized.
- Example 9 of the present disclosure will be described below with reference to the drawings.
- structures corresponding to those in the first embodiment described above are given the same reference numerals or the numbers in the first half are changed so that the numbers and letters in the second half are the same.
- an image forming apparatus is exemplified in which four cartridges (hereinafter referred to as process cartridges) are removably attachable to the image forming apparatus.
- process cartridges the number of process cartridges installed in the image forming apparatus is not limited to this. It is set appropriately as necessary.
- a laser beam printer is exemplified as one aspect of the image forming apparatus. [Schematic configuration of image forming apparatus]
- FIG. 130 is a schematic cross-sectional view of the image forming apparatus 500. Further, FIG. 131 is a sectional view of the process cartridge P. Further, FIG. 132 is an exploded perspective view of the process cartridge P viewed from the drive side, which is one end side in the direction of the rotational axis of the photosensitive drum 4 (hereinafter referred to as the longitudinal direction).
- This image forming apparatus 500 is a four-color full-color laser printer using an electrophotographic process, and forms a color image on a recording medium S.
- the image forming apparatus 500 is of a process cartridge type, and a process cartridge is removably attached to an image forming apparatus main body 502 to form a color image on a recording medium S.
- the side on which the front door 111 is provided is the front (front), and the surface opposite to the front is the back (rear). Further, when viewing the image forming apparatus 500 from the front, the right side is called a drive side, and the left side is called a non-drive side. Further, when the image forming apparatus 500 is viewed from the front, the upper side is the upper surface, and the lower side is the lower surface.
- 130 is a cross-sectional view of the image forming apparatus 500 viewed from the non-driving side, with the front side of the paper showing the non-driving side of the image forming apparatus 500, the right side of the paper showing the front of the image forming apparatus 500, and the back side of the paper showing the driving side of the image forming apparatus 500. Be on the side.
- the image forming apparatus main body (apparatus main body) 502 includes four process cartridges P (PY, PM, PC): a first process cartridge PY, a second process cartridge PM, a third process cartridge PC, and a fourth process cartridge PK. , PK) are arranged substantially horizontally.
- Each of the first to fourth process cartridges P has a similar electrophotographic process mechanism, and each uses a different color of developer (hereinafter referred to as toner). .
- Rotational driving force is transmitted to the first to fourth process cartridges P (PY, PM, PC, PK) from a drive output section (not shown) of the image forming apparatus main body 502.
- bias voltages (charging bias voltage, developing bias voltage, etc.) are supplied to each of the first to fourth process cartridges P (PY, PM, PC, PK) from the image forming apparatus main body 502.
- each of the first to fourth process cartridges P (PY, PM, PC, PK) of this embodiment has a drum unit (photoreceptor unit, first unit) 8.
- the drum unit 8 rotatably supports the photosensitive drum 4 and includes a charging member and a cleaning member as process means that act on the photosensitive drum 4 .
- the photosensitive drum 4 is a cylindrical photosensitive member having a photosensitive layer on its outer peripheral surface.
- each of the first to fourth process cartridges P has a developing unit (second unit) 9 equipped with a developing member that develops the electrostatic latent image on the photosensitive drum 4. .
- the drum unit 8 and the developing unit 9 are coupled to each other. A more specific configuration of the process cartridge P will be described later.
- the first process cartridge PY stores yellow (Y) toner in the developer container 25 and forms a yellow toner image on the surface of the photosensitive drum 4.
- the second process cartridge PM stores magenta (M) toner in the developer container 25 and forms a magenta toner image on the surface of the photosensitive drum 4.
- the third process cartridge PC stores cyan (C) toner in the developer container 25 and forms a cyan toner image on the surface of the photosensitive drum 4.
- the fourth process cartridge PK contains black (K) toner in the developer container 25 and forms a black toner image on the surface of the photosensitive drum 4.
- a laser scanner unit 114 as an exposure means is provided above the first to fourth process cartridges P (PY, PM, PC, PK).
- This laser scanner unit 114 outputs laser light U in accordance with image information.
- the laser light U passes through the exposure window 10 of the process cartridge P and scans and exposes the surface of the photosensitive drum 4.
- An intermediate transfer belt unit 112 as a transfer member is provided below the first to fourth process cartridges P (PY, PM, PC, PK).
- the intermediate transfer belt unit 112 includes a drive roller 112e, a turn roller 112c, and a tension roller 112b, and a flexible transfer belt 112a is wrapped around the intermediate transfer belt unit 112.
- the lower surface of the photosensitive drum 4 of each of the first to fourth process cartridges P (PY, PM, PC, PK) is in contact with the upper surface of the transfer belt 112a.
- the contact portion is the primary transfer portion.
- a primary transfer roller 112d is provided inside the transfer belt 112a, facing the photosensitive drum 4.
- a secondary transfer roller 106a is brought into contact with the turn roller 112c via a transfer belt 112a.
- the contact portion between the transfer belt 112a and the secondary transfer roller 106a is a secondary transfer portion.
- a feeding unit 104 is provided below the intermediate transfer belt unit 112.
- This feeding unit 104 includes a paper feeding tray 104a that stores and stores recording media S, and a paper feeding roller 104b.
- a fixing device 107 and a paper ejecting device 108 are provided in the upper left part of the image forming apparatus main body 502 in FIG. 130.
- the upper surface of the image forming apparatus main body 502 is a paper discharge tray 113.
- a toner image is fixed on the recording medium S by a fixing means provided in the fixing device 107, and the recording medium S is discharged to the paper discharge tray 113.
- the operations to form a full color image are as follows.
- the photosensitive drums 4 of each of the first to fourth process cartridges P (PY, PM, PC, PK) are rotated at a predetermined speed (in the direction of arrow A in FIG. 131).
- the transfer belt 112a is also rotationally driven in the forward direction of the rotation of the photosensitive drum (in the direction of arrow C in FIG. 130) at a speed corresponding to the speed of the photosensitive drum 4.
- the laser scanner unit 114 is also driven. In synchronization with the driving of the laser scanner unit 114, the charging roller 5 of each process cartridge uniformly charges the surface of the photosensitive drum 4 to a predetermined polarity and potential.
- the laser scanner unit 114 scans and exposes the surface of each photosensitive drum 4 with laser light U in accordance with the image signal of each color. As a result, an electrostatic latent image is formed on the surface of each photosensitive drum 4 in accordance with the image signal of the corresponding color.
- the formed electrostatic latent image is developed by the developing roller 6 which is rotated at a predetermined speed (in the direction of arrow D in FIG. 131).
- a yellow toner image corresponding to the yellow component of the full-color image is formed on the photosensitive drum 4 of the first process cartridge PY. Then, the toner image is primarily transferred onto the transfer belt 112a. Similarly, a magenta toner image corresponding to the magenta component of the full-color image is formed on the photosensitive drum 4 of the second process cartridge PM. Then, the toner image is primarily transferred onto the transfer belt 112a so as to be superimposed on the yellow toner image that has already been transferred. Similarly, a cyan toner image corresponding to the cyan component of the full-color image is formed on the photosensitive drum 4 of the third process cartridge PC.
- the toner image is primarily transferred onto the transfer belt 112a by being superimposed on the yellow and magenta toner images that have already been transferred.
- a black toner image corresponding to the black component of the full-color image is formed on the photosensitive drum 4 of the fourth process cartridge PK.
- the toner image is primarily transferred onto the transfer belt 112a by being superimposed on the yellow, magenta, and cyan toner images that have already been transferred. In this way, an unfixed toner image in four full colors of yellow, magenta, cyan, and black is formed on the transfer belt 112a.
- the recording medium S is separated and fed one by one at predetermined control timing.
- the recording medium S is introduced into a secondary transfer portion, which is a contact portion between the secondary transfer roller 106a and the transfer belt 112a, at a predetermined control timing.
- the four-color superimposed toner image on the transfer belt 112a is transferred to the surface of the recording medium S all at once while the recording medium S is being conveyed to the secondary transfer section.
- the first to fourth process cartridges P have the same structure, but contain different colors of toner.
- the process cartridge P includes a photosensitive drum 4 (4Y, 4M, 4C, 4K) and a process means that acts on the photosensitive drum 4.
- the process means includes a charging means for charging the photosensitive drum 4, a developing means for developing a latent image formed on the photosensitive drum 4 by attaching toner to the photosensitive drum 4, and a residual toner remaining on the surface of the photosensitive drum 4.
- the charging means (charging member) is the charging roller 5
- the developing means developer member
- the cleaning means cleaning member
- the process cartridge P is divided into a drum unit 8 (8Y, 8M, 8C, 8K) and a developing unit 9 (9Y, 9M, 9C, 9K).
- the developing roller 6 carries toner on its surface. [Drum unit configuration]
- the drum unit 8 includes a photosensitive drum 4, a charging roller 5, a cleaning blade 7, a waste toner container 15, a waste toner storage section 15a, a drive side cartridge cover member 520, and a non-drive side cartridge cover. It is composed of a member 521.
- the photosensitive drum 4 is rotatably supported about an axis (rotation shaft) M1 by a drive-side cartridge cover member 520 and a non-drive-side cartridge cover member 521 provided at both longitudinal ends of the process cartridge P. Further, as shown in FIG.
- a photoreceptor coupling member 43 to which a driving force for rotating the photoreceptor drum 4 is input is provided (fixed) at one end in the longitudinal direction of the photoreceptor drum 4. .
- the photoreceptor coupling member 43 engages with a coupling (not shown) as a drum drive output section of the image forming apparatus main body 502, and is coupled to the axis M1 by the driving force of a drive motor (not shown) of the image forming apparatus main body 502. It rotates on a coaxial rotating shaft and transmits driving force to the photosensitive drum 4.
- the charging roller 5 is supported by the waste toner container 15 so as to be able to contact the photosensitive drum 4 and rotate as a result of the rotation.
- the cleaning blade 7 is supported by the waste toner container 15 so as to come into contact with the circumferential surface of the photosensitive drum 4 with a predetermined pressure.
- the transfer residual toner removed from the circumferential surface of the photosensitive drum 4 by the cleaning blade 7 is stored in a waste toner storage section 15 a in the waste toner container 15 .
- the waste toner container 15, the driving side cartridge cover member 520, and the non-driving side cartridge cover member 521 constitute a drum frame (first frame).
- the developing unit 9 includes a developing roller (developing member) 6, a developing blade 30, a developing container 25, a developing cover member 533, an agitation member 29a (not shown), a toner transport roller 70 (not shown), and the like. has been done.
- the developing container 25 includes a toner storage section 29 therein for storing toner to be supplied to the developing roller 6, and supports a developing blade 30 that regulates the toner layer thickness (thickness of the toner layer) on the circumferential surface of the developing roller 6.
- the developing blade 30 is made of an elastic member 30b which is a sheet metal with a thickness of about 0.1 mm, and a metal material having an L-shaped cross section to which the elastic member 30b is attached by welding or the like, and is supported by the developing container 25.
- a member 30a is provided.
- the developing blade 30 forms a toner layer of a predetermined thickness between the elastic member 130b and the developing roller 106.
- the developing blade 30 is attached to the developing container 25 at two locations, one end side and the other end side in the longitudinal direction, with fixing screws 30c.
- the developing roller 6 is composed of a metal core 6c and a rubber portion 6d.
- the developing roller 6 is rotatably supported about an axis (rotating shaft) M2 by a driving side bearing 526 and a non-driving side bearing 27 attached to both ends of the developing container 25 in the longitudinal direction.
- the stirring member 29a stirs the toner in the toner storage portion 29 by rotating.
- the toner transport roller (developer supply member) 70 contacts the developing roller 6 and supplies toner to the surface of the developing roller 6 while also stripping the toner from the surface of the developing roller 6 .
- a developer coupling member 74 is provided at one end in the longitudinal direction of the developer unit 9 to which a driving force for rotating the developer roller 6 is input.
- the development coupling member 74 engages with a main body side coupling member (not shown) serving as a development drive output section of the image forming apparatus main body 502, and receives the rotational driving force of a drive motor (not shown) of the image forming apparatus main body 502. In response, it rotates about a rotation axis substantially parallel to the axis M2.
- the driving force input to the developer coupling member 74 is transmitted by a drive train (not shown) provided in the developer unit 9, thereby making it possible to rotate the developer roller 6 in the direction of arrow D in FIG. be.
- a developer cover member 533 that supports and covers the developer coupling member 74 and a gear train (not shown) is attached to one end of the developer container 25 in the longitudinal direction.
- the developing container 25, the driving side bearing 526, the non-driving side bearing 27, and the developing cover member 533 constitute a developing frame (second frame).
- the assembly of the drum unit 8 and the developing unit 9 will be explained using FIG. 132.
- the drum unit 8 and the developing unit 9 are coupled by a driving side cartridge cover member 520 and a non-driving side cartridge cover member 521 provided at both longitudinal ends of the process cartridge P.
- a drive side cartridge cover member 520 provided at one end in the longitudinal direction of the process cartridge P is provided with a support hole 520a for swingably (moveably) supporting the developing unit 9.
- the non-drive side cartridge cover member 521 provided at the other end in the longitudinal direction of the process cartridge P is provided with a cylindrical support portion 521a for swingably supporting the developing unit 9.
- the drive side cartridge cover member 520 and the non-drive side cartridge cover member 521 are provided with support holes 520b and 521b for rotatably supporting the photosensitive drum 4.
- the outer peripheral surface of the cylindrical portion 533b of the developing cover member 533 is fitted into the support hole 520a of the drive side cartridge cover member 520.
- the support portion 521a of the non-drive side cartridge cover member 521 is fitted into the hole of the non-drive side bearing 27.
- both longitudinal ends of the photosensitive drum 4 are fitted into the support hole 520b of the drive side cartridge cover member 520 and the support hole portion 521b of the non-drive side cartridge cover member 521.
- the drive-side cartridge cover member 520 and the non-drive-side cartridge cover member 521 are fixed to the waste toner container 15 by screws, adhesive, or the like (not shown). That is, the driving side cartridge cover member 520 and the non-driving side cartridge cover member 521 are integrated with the waste toner container 15 to form the drum unit 8.
- the developing unit 9 is movably (rotatably) supported with respect to the drum unit 8 (photosensitive drum 4) by the driving side cartridge cover member 520 and the non-driving side cartridge cover member 521.
- the axis is the axis that connects the support hole 520a of the drive side cartridge cover member 520 and the support part 521a of the non-drive side cartridge cover member 521, and the center of rotation of the developing unit 9 with respect to the drum unit 8 is the pivot axis (rotation axis). , axis of rotation) K.
- the center line of the cylindrical portion 533b of the developer cover member 533 is coaxial with the rotational axis of the developer coupling member 74, and the developer unit 9 is connected to the image forming apparatus main body 502 via the developer coupling member 74 at the swing axis K.
- the swing axis K, the axis M1, and the axis M2 are substantially parallel to each other.
- a developing unit biasing spring (second unit biasing member) 134 is provided between the developing unit 9 and the drum unit 8.
- This developing unit biasing spring 134 (see FIG. 131) rotates the developing unit 9 relative to the drum unit 8 in the direction of arrow V2 (see FIGS. 129(a) and (b)) about the swing axis K. energize.
- the developing unit biasing spring 134 biases the developing unit 9 in the direction of movement from the separated position toward the developing position.
- the developing unit biasing spring 134 is a coil spring and is an elastic member.
- FIG. 133 is a sectional view of the image forming apparatus 500 with the front door 111 open and the tray 110 located inside the image forming apparatus main body 502.
- FIG. 134 is a cross-sectional view of the image forming apparatus 500 with the front door 111 open and the tray 110 located outside the image forming apparatus main body 502.
- the tray 110 is movable relative to the image forming apparatus main body 502 in the direction of arrow X1 (pushing direction) and the direction of arrow X2 (pulling direction).
- the tray 110 is provided so that it can be pulled out and pushed into the image forming apparatus main body 502, and the tray 110 is configured to be movable in a substantially horizontal direction when the image forming apparatus main body 502 is installed on a horizontal surface.
- a state in which the tray 110 is located outside the image forming apparatus main body 502 (the state shown in FIG. 134) is referred to as an outside position.
- a state in which the tray 110 is located inside the image forming apparatus main body 502 with the front door open and the photosensitive drum 4 and the transfer belt 112a are separated by a gap T1 (the state shown in FIG. 133) is referred to as a first inside position. .
- the tray 110 has a mounting portion 110a in which a process cartridge P can be removably mounted at an outer position shown in FIG.
- Each process cartridge P mounted on the mounting portion 110a at an outer position of the tray 110 is supported by the tray 110 through contact between the drive side cartridge cover member 520 and the non-drive side cartridge cover member 521. Then, each process cartridge P moves inside the image forming apparatus main body 502 as the tray 110 moves from the outside position to the first inside position while being placed in the mounting portion 110a. At this time, as shown in FIG. 133, each process cartridge P moves while maintaining a gap T1 between the transfer belt 112a and the photosensitive drum 4.
- the tray 110 can move the process cartridge P inside the image forming apparatus main body 502 without the photosensitive drum 4 coming into contact with the transfer belt 112a.
- a gap T1 is maintained between the photosensitive drum 4 and the transfer belt 112a.
- the direction perpendicular to the arrow X direction (X1, X2) in FIG. 133 and perpendicular to the axis of the photosensitive drum 4 is referred to as the Z direction (arrows Z1, Z2 in FIG. 133).
- the tray 110 is movable from the first inner position in the direction of arrow Z2 in FIG. 133 to the second inner position (state in FIG. 130) where the photosensitive drum 4 and transfer belt 112a are in contact and image formation is possible.
- the tray 110 located at the first inside position moves in the direction of arrow Z2 in FIG. 133 in conjunction with the operation of closing the front door 111 in the direction of arrow R in FIG. 133 from the open state. , configured to move to a second inner position.
- the tray 110 allows a plurality of process cartridges P to be collectively installed at a position inside the image forming apparatus main body 502 where image formation is possible.
- Example 1 the spacers 51R and 51L were configured to move by receiving force through the moving members 52R and 52L, but in the configuration of this example, the spacers receive force without using the moving members. This is a configuration that can be accepted.
- the spacer (spacer portion) 510 is a spacing member for maintaining a predetermined distance between the photosensitive drum 4 and the developing roller 6, and is a regulating member for regulating the position of the developing unit 9 with respect to the drum unit 8.
- the spacer (holding member) 510 has an annular shape and has a supported hole (supported portion) 510a that is in contact with and supported by the support portion 533c of the developing frame.
- a protruding part (holding part) 510b that protrudes from the supported hole 510a in the radial direction of the supported hole 510a, there is a circular arc surface centered on the axis of the supported hole 510a, which corresponds to a part of the drum unit 8. It has an abutting surface 510c as an abutting part.
- the protruding part (holding part) 510b is a part that connects the supported part 510a and the contact surface 510c, and has enough rigidity to maintain the separated position of the developing unit 9 when it is sandwiched between the drum unit 8 and the developing unit 9. ing.
- the spacer 510 has a regulated surface (regulated portion) 510k adjacent to the contact surface 510c.
- the spacer 510 includes a protruding portion 510d that protrudes in the radial direction of the supported hole 510a, and a force receiving portion (a first force receiving portion, a contact force receiving portion) that protrudes from the protruding portion 510d along the axial direction of the supported hole 510a. (receiving part or pressed part) 510e.
- the spacer 510 has a main body part 510f that is connected to the supported hole 510a, and the main body part 510f has a spring hook part 510g that projects in the axial direction of the supported hole 510a, and a surface perpendicular to the axial direction of the supported hole 510a.
- a first restricted surface 510h is provided.
- FIG. 136 is a perspective view of the process cartridge P before the spacer 510 is assembled as seen from the drive side
- FIG. 137 is a perspective view of the process cartridge P after the spacer 510 is assembled as seen from the drive side
- FIG. 129 is a view of the process cartridge P after the spacer 510 has been assembled, viewed from the drive side along the swing axis K
- FIG. 129(a) shows the developing unit 9 and the developing frame in the retracted position (separated position).
- FIG. 129(b) shows a state in which the developing unit 9 and the developing frame are at the developing position.
- the developing unit 9 rotates the photosensitive drum around the swing axis K by fitting the outer diameter portion of the cylindrical portion 533b of the developing cover member 533 into the support hole 520a of the drive side cartridge cover member 520. It is rotatably supported with respect to 4. Further, the developing cover member 533 has a cylindrical support portion 533c that projects in the longitudinal direction along the swing axis K. The outer peripheral surface of the support portion 533c fits into the inner peripheral surface of the supported hole 510a of the spacer 510, and the support portion 533c rotatably supports the spacer 510.
- the swing axis (rotation shaft) of the spacer 510 assembled to the developer cover member 533 is referred to as a swing axis H. Note that the swing axis H is substantially parallel to the swing axis K.
- the developing cover member 533 has a retaining portion 533d that projects in the longitudinal direction along the swing axis H.
- the retaining portion 533d can be elastically deformed in a direction away from the supporting portion 533c when the spacer 510 is assembled to the developing cover member 533.
- movement of the spacer 510 assembled to the developer cover member 533 in the direction of the swing axis H is regulated by the stopper portion 533d coming into contact with the spacer 510.
- the retaining portion 533d comes into contact with the spacer 510 and restricts the movement of the spacer 510.
- the spacer 510 is supported by the developer cover member 533 of the developer unit 9 so as to be rotatable about the swing axis H.
- a biasing member including a spacer part biasing part (holding part biasing part) that biases the spacer 510 in the direction of arrow B1 in FIG.
- a tension spring 530 which is an elastic member.
- the tension spring is a coil spring.
- the tension spring 530 is attached to a spring hook 533g provided on the developer cover member 533 and protruding in the direction of the swing axis K, and to a spring hook 510g of the spacer 510 assembled to the developer cover member 533.
- the spring hanging portion 510g corresponds to the point of action of the tension spring 530, and the tension spring 530 applies a force in the direction of arrow F in FIG.
- the spacer 510 biased by the tension spring 530 has a first regulated surface 510h provided on the spacer 510 and a first regulated surface 533h provided on the developing cover member 533. engage.
- movement of the spacer 510 in the direction of arrow B1 in FIG. 129 is restricted. That is, the position of the spacer 510 relative to the developing cover member 533 in the rotational direction (direction of arrow B1) about the swing axis H is determined.
- the state in which the first regulated surface 510h and the first regulated surface 533h are engaged is referred to as the regulated position (first position) of the spacer 510.
- the tension spring 530 is used as an example of the biasing member that biases the spacer 510 to the regulation position (first position), but the present invention is not limited to this.
- a torsion coil spring, a leaf spring, or the like may be used as the biasing member to bias the spacer 510 to the restricted position.
- the material of the biasing means may be metal, mold, or the like, as long as it is elastic and can bias the spacer 510.
- the developing unit 9 including the spacer 510 and the tension spring 530 is coupled to the drum unit 8 by the drive-side cartridge cover 520 as described above.
- the force receiving portion 510e of the assembled spacer 510 is located on the same side as the side on which the developer coupling member 74 or the photoreceptor coupling member 43 is arranged with respect to the direction of the rotational axis M2 of the developer roller 6. Placed.
- the drive-side cartridge cover 520 has an abutted portion 520c.
- the abutted portion 520c is a ridgeline portion formed at a corner where two surfaces perpendicular to the axis of the support hole 520a intersect, and is a ridgeline portion extending substantially parallel to the axis of the support hole 520a.
- the ridgeline portion serving as the abutted portion 520c may be a portion formed by chamfering a corner portion where two surfaces perpendicular to the axis of the support hole 520a intersect with a flat surface, a curved surface, or the like.
- the abutted portion 520c is the abutment surface of the spacer 510 located at the regulation position when the drive side cartridge cover 520 is assembled to the developing unit 9 and the drum unit 8. 510c, and is arranged so as to be able to come into contact with the contact surface 510c. Furthermore, as described above, the developing unit 9 is rotatable about the swing axis K with respect to the drum unit 8, and receives a biasing force from a developing unit biasing spring (not shown). When the abutting surface 510c of the spacer 510 located at the regulation position abuts the abutted portion 520c, the position of the developing unit 9 relative to the drum unit 8 in the rotational direction about the swing axis K is determined.
- the developing roller 6 of the developing unit 9 and the photosensitive drum 4 are separated by a gap T2.
- the state in which the developing roller 6 is separated from the photosensitive drum 4 by the gap T2 by the spacer 510 is referred to as the retracted position (separated position) of the developing unit 9 (the state shown in FIG. 129(a)). Note that when the developing unit 9 is in the retracted position (separated position), it can be said that the developing frame body is also in the retracted position (separated position).
- the force that the abutting surface 510c of the spacer 510 receives from the abutted portion 520c and the force that the inner peripheral surface of the supported hole 510a receives from the supporting portion 533c are respectively This is a vector force passing through H (see FIG. 129(a)). Furthermore, since these forces are in opposite directions, these forces are balanced. Therefore, when the developing unit 9 is in the retracted position, the force that the contact surface 510c receives from the first non-contact portion 520c does not cause the spacer 510 to generate a moment about the swing axis H.
- the abutted portion 520c may be formed to have a circular arc surface centered on the axis of the support hole 520a when the developing unit 9 is in the retracted position. Even with this configuration, when the developing unit 9 is in the retracted position, the force that the contact surface 510c receives from the first non-contact portion 520c does not cause the spacer 510 to generate a moment about the swing axis H.
- the axis M2 of the developing unit 9 when the developing unit 9 is located at the retracted position, the axis M2 of the developing unit 9 is They may be in a non-parallel state. Specifically, for example, the developing roller 6 may only be partially separated from the photosensitive drum 4 in the direction of the axis M1 of the photosensitive drum 4.
- the position of the developing unit 9 where the developing roller 6 and the photosensitive drum 4 are in contact is referred to as a developing position (contact position) (the state shown in FIG. 129(b)). Note that when the developing unit 9 is at the developing position, it can be said that the developing frame is also at the developing position (contact position).
- the spacer 510 rotates from the regulation position in the direction of arrow B2 in FIG.
- the position that allows movement to the contact position) is called the permissible position (second position) (FIG. 129(b)).
- the developing cover member 533 has a retraction force receiving part (another force receiving part, a second force receiving part, a separating force receiving part) 533a that protrudes in the radial direction of the cylindrical part 533b. Similar to the force receiving part 510e, the retracting force receiving part 533a is also arranged on the same side as the side on which the developing coupling member 74 or the photoreceptor coupling member 43 is arranged with respect to the rotational axis direction of the developing roller 6. Since the developing cover member 533 is fixed to the developing unit 9, when a force is applied to the retracting force receiving portion 533a in the direction of arrow W51 in FIG. 129(b) while the developing unit 9 is in the developing position, the developing unit 9 swings.
- a retraction force receiving part another force receiving part, a second force receiving part, a separating force receiving part
- FIGS. 129(a) and 129(b) the direction in which the retracting force receiving portion 533a moves when the developing unit 9 moves from the developing position to the retracting position is indicated by an arrow W51, and the direction opposite to the arrow W51 is indicated by an arrow W51. It is indicated by W52.
- W51 direction and W52 direction are approximately horizontal directions, and are substantially the direction in which at least two of the first to fourth process cartridges PY, PM, PC, and PK installed in the image forming apparatus main body 502 are arranged. is parallel to Further, the W51 direction and the W52 direction are substantially parallel to the moving direction of the separation control member 540, which will be described later.
- the force receiving portion 510e of the spacer 510 assembled to the developing unit 9 is located upstream of the retracting force receiving portion 533a in the W51 direction in FIGS. 129(a) and 129(b). Further, as shown in FIGS. 129(a) and 129(b), when viewed from the drive side along the swing axis K, the force receiving portion 510e and the retracting force receiving portion 533a are substantially opposite to each other, and the force receiving portion 510e and the retracting force receiving portion 533a form a space Q surrounded by a two-dot chain line.
- the space Q is a space that is released in the direction of gravity when the process cartridge P is attached to the image forming apparatus main body 502.
- FIG. 138(a) is a diagram of a state in which the process cartridge P is located at the first inner position and the photosensitive drum 4 and the transfer belt 112a are separated, viewed from the drive side.
- FIG. 138(b) is a diagram of a state in which the process cartridge P is located at the second inner position and the photosensitive drum 4 is in contact with the transfer belt 112a, viewed from the drive side.
- 138A and 138B for the sake of explanation, parts other than the abutted portion 520c and the spacer regulating surface 520d of the drive-side cartridge cover 520 are omitted.
- the image forming apparatus main body 502 has a separation control member (force applying member) 540 corresponding to each process cartridge P (PY, PM, PC, PK).
- the separation control member 540 is arranged under the spacer 510 of the process cartridge P located at the first inner position and the second inner position (in the Z1 direction in FIG. 138).
- the separation control member 540 has a control section (projection section) 540a that projects toward the process cartridge P, and the control section 540a has a first force application surface (retreat force application section, separation force application section) 540b and a second force application surface. It has a surface (force applying part, contact force applying part) 540c.
- the control section 540a of the separation control member 540 is arranged below the lower surface of the space Q of the process cartridge P located at the first inner position (in the Z1 direction in FIG. 138). Further, the separation control member 540 is arranged so that a gap T5 is formed between the separation control member 540 and the spacer 510 when the process cartridge P is located at the first inner position (FIG. 138(a)).
- the spacer 510 of the process cartridge P inserted into the image forming apparatus main body 502 by the tray 110 moving from the outer position to the first inner position can be inserted into the image forming apparatus without contacting the separation control member 540. It is inserted into the main body 502.
- the control unit 540a enters the space Q as shown in FIG. 138(b).
- FIG. 142 shows a view of the process cartridge P installed in the image forming apparatus 502 as viewed from the direction of arrow J in FIG. 138(b).
- FIG. 142 shows the separation control member 540 with parts other than the control section 540a omitted. Also, some of the parts constituting the process cartridge P are omitted from the illustration.
- the retraction force receiving part 533a is arranged downstream of the force receiving part 510e, and a space Q is formed between the force receiving part 510e and the retraction force receiving part 533a in the W51 direction. There is. Note that the W51 direction will be detailed later.
- the force receiving portion 510e of the spacer 510 and the retracting force receiving portion 533a of the developing cover member 533 are arranged so as to partially overlap in the direction along the swing axis K of the developing unit 9.
- a space Q is formed.
- the control section 540a moves in the direction along the swing axis K to the force receiving section 510e. It is arranged so as to overlap with the retraction force receiving part 533a.
- FIG. 139 is a diagram of the process cartridge P located at the second inner position inside the image forming apparatus main body 502, viewed from the drive side.
- the drive-side cartridge cover 520 is shown with parts other than the abutted portion 520c and the spacer regulating surface 520d omitted.
- FIG. 139(a) shows a state in which the developing unit 9 is at the retracted position (separated position) and the separation control member 540 is at the home position.
- FIG. 139(b) shows a state in which the developing unit 9 is moving from the retracted position to the developing position.
- FIG. 139(c) shows a state in which the developing unit 9 is at the developing position and the separation control member 540 is located at the first position.
- FIG. 139(d) shows a state in which the developing unit 9 is at the developing position and the separation control member 540 is at the home position.
- T3 between the second force applying surface 540c and the force receiving part 510e of the process cartridge P mounted at the second inner position.
- the developing coupling member 74 receives a driving force from the image forming apparatus main body 502 in the direction of arrow V2 in FIG. 139(a), and the developing roller 6 rotates.
- the developing unit 9 having the developing coupling member 74 receives a moment from the image forming apparatus main body 502 in the direction of the arrow V2 about the swing axis K. Even if the developing unit 9 receives this moment when the developing unit 9 is in the retracted position (separated position) and the spacer 510 is in the regulating position (first position) shown in FIG.
- the developing unit 9 comes into contact with the contacted portion 520c, and the attitude of the developing unit 9 is regulated to the retracted position (separated position) (maintained at the retracted position).
- the separation control member 540 of this embodiment is configured to be movable from the home position in the direction of arrow W52 in FIG. 139(a). When the separation control member 540 moves in the W52 direction, the second force applying surface (contact force applying part) 540c of the control part 540a and the force receiving part (contact force receiving part) 510e of the spacer 510 come into contact with each other, and the spacer 510 is moved in the direction shown in FIG. (a) Rotate in the middle B2 direction.
- the spacer 510 rotating in this manner moves to a permissible position (second position) where the abutting surface 510c and the abutted portion 520c are separated.
- a permissible position second position
- the position of the separation control member 540 that moves the spacer 510 to the permissible position shown in FIG. 139(b) is referred to as a first position.
- the separation control member 540 When the spacer 510 is moved to the allowable position by the separation control member 540, the developing unit 9 is rotated in the V2 direction by the moment received from the image forming apparatus main body 502 and the biasing force of the developing unit biasing spring 134, and the developing roller 6 and photosensitive drum 4 are rotated in the V2 direction. 139(c)). Then, the separation control member 540 moves from the first position in the W51 direction and returns to the home position (FIG. 139(d)). The spacer 510 is biased by a tension spring 530 in the direction of arrow B1 in FIG.
- the regulated surface 510k of the spacer 510 comes into contact with the spacer regulating surface 520d of the drive-side cartridge cover 520, the movement of the spacer 510 toward the regulated position (first position) is regulated, and the movement of the spacer 510 toward the regulated position (first position) is regulated. will be maintained.
- a gap T3 is formed.
- a gap T4 is also formed between the retraction force receiving part (separating force receiving part) 533a and the first force applying surface (separating force applying part) 540b.
- the spacer 510 is moved from the regulation position to the allowable position, and the development roller 9 and the photosensitive drum 4 abut each other from the retracted position of the development unit 9. Move to the developing position.
- the force receiving portion 510e is a force for moving the spacer 510 from the regulation position (first position) to the permissible position (second position), and moves the developing unit 9 and the developing frame to the retracted position (separated position). It can be said that the separation control member 540 receives a force (contact force) for moving from to the developing position.
- the photosensitive drum 4 can be said to be a positioning section (second positioning section) that positions the developing roller 6 of the developing unit 9 at the developing position. At this time, it can be said that the developing unit 9 is stably held by the drum unit 8. At this time, the spacer 151R at the release position is not directly involved in positioning the developing unit 109.
- FIG. 140 is a diagram of the process cartridge P located at the second inner position inside the image forming apparatus main body 502, viewed from the drive side.
- the drive-side cartridge cover 520 is shown with parts other than the abutted portion 520c and the spacer regulating surface 520d omitted.
- FIG. 140(a) shows a state in which the developing unit 9 is at the developing position and the separation control member 540 is at the home position.
- FIG. 140(b) shows a state in which the developing unit 9 is moving from the developing position to the retracted position.
- FIG. 140(c) shows a state in which the developing unit 9 is in the retracted position.
- the separation control member 540 of this embodiment is configured to be movable from the home position in the direction of arrow W51 in FIG. 140(a).
- the separation control member 540 moves in the W51 direction
- the first force applying surface 540b and the retraction force receiving portion (separation force receiving portion) 533a of the developing cover member 533 come into contact, and the retraction force receiving portion 533a moves at least in the W51 direction. Therefore, the developing unit 9 rotates in the direction of arrow V1 in FIG. 140. That is, the developing unit 9 moves from the developing position toward the retracted position (separated position) against the biasing force of the developing unit biasing spring 134.
- the W51 direction is a direction in which the retraction force receiving portion 533a receives a force from the first force applying surface 540b and moves at least in order to move the developing unit 9 from the development position toward the retraction position, and is the retraction direction. (separation direction). Then, as the developing unit 9 rotates in the direction of the arrow V1 in FIG. 140(a), the regulated surface 510k of the spacer 510 and the spacer regulating surface 520d of the drive side cartridge cover 520 are separated. Therefore, the spacer 510 rotates in the direction of arrow B1 in FIG. 140(a) (direction from the permissible position to the restricted position) by the urging force of the tension spring 530.
- the spacer 510 rotates until the first regulated surface 510h comes into contact with the first regulated surface 533h of the developing cover member 533, and moves to the regulated position (first position).
- the contact surface 510c and the spacer 510 are moved as shown in FIG.
- a gap T5 is formed between the abutted parts 520c.
- the position of the separation control member 540 shown in FIG. 140(b) where the developing unit 9 is rotated from the developing position toward the retracted position and the spacer 510 can be moved to the regulation position is referred to as a second position.
- the separation control member 540 moves from the second position in the direction of arrow W52 in FIG. 140(b) and returns to the home position
- the developing unit 9 is moved in the direction of arrow V2 in FIG. 140 by the moment in the direction of arrow V2 in FIG.
- the abutting surface 510c and the abutted portion 520c abut.
- the spacer 510 remains in the restricted position due to the biasing force of the tension spring 530. Therefore, the retracted position of the developing unit 9 is regulated by the spacer 510, and the developing roller 6 and the photosensitive drum 4 are separated by the gap T2 (FIG. 140(c)).
- the moment in the V2 direction is generated by the biasing force of the developing unit biasing spring 134 and the driving force that the developer coupling member 74 receives from the image forming apparatus main body 502. That is, the developing unit 9 is moved to the contact position by the spacer 510 against the moment (biasing force) in the direction of arrow V2 due to the driving force received from the image forming apparatus main body 502 and the biasing force of the developing pressure spring 134. are regulated and maintained at a separate position.
- the retraction force receiving part (separation force receiving part) 533a is a force for moving the spacer 510 from the permissible position (second position) to the regulating position (first position), and It can be said that the separation control member 540 receives a force (retraction force, separation force) for moving the frame from the development position to the retraction position (separation position).
- a gap T3 is formed.
- a gap T4 is formed between the retraction force receiving part (separating force receiving part) 533a and the first force applying surface (separating force applying part) 540b.
- the spacer 510 moves from the permissible position to the restricted position.
- the developing unit 9 is maintained at the retracted position by the spacer 510.
- the spacer 510 is in the regulating position.
- the abutting surface 510c and the abutted portion 520c are in contact with each other. Therefore, it is possible to restrict the development unit 9 from moving to the development position and maintain it at the retracted position (separated position).
- the width between the force receiving part 510e and the retreating force receiving part 533a in the W51 direction or the W52 direction when the developing unit 9 is in the separated position is 3.5 mm or more. , is preferably 18.5 mm or less, more preferably 10 mm or less. With such a dimensional relationship, it becomes possible to perform appropriate abutting and separating operations.
- the position of the developing unit 9 relative to the drum unit 8 is biased in the V2 direction by the driving torque received from the image forming apparatus main body 502 and the developing unit biasing spring 134, as described above.
- the supported part 510a contacts the support part 533c
- the abutting part 510c contacts the abutting part 520c. Therefore, the contacted portion 520c can be said to be a positioning portion (first positioning portion) that positions the developing unit 9 from which the photosensitive drum 4 is located at the separated position (retracted position).
- the developing unit 9 is stably held by the drum unit 8.
- the spacer 510 in the regulation position (first position) creates a situation in which the drum unit 8 can stably hold the developing unit 9 in the separated position (retracted position).
- the developing roller 6 and the photosensitive drum 4 are brought into contact and separated.
- the developing roller 6 can be brought into contact with the photosensitive drum 4 only when forming an image, and the developing roller 6 can be kept separated from the photosensitive drum 4 when not forming an image. Therefore, even if the developing roller 6 and the photosensitive drum 4 are left for a long period of time without image formation, the developing roller 6 and the photosensitive drum 4 do not deform, and stable image formation can be performed.
- the retraction force receiving part (separation force receiving part) 533a and the force receiving part (contact force receiving part ) 510e were arranged so that they faced each other and a space was formed between them. That is, in the W51 direction (or W52 direction), the arrangement is such that a gap is formed between the retraction force receiving part (separation force receiving part) 533a and the force receiving part (contact force receiving part) 510e.
- the retracting force receiving portion (separated The force receiving portion) 533a is arranged closer to the rotation axis M1 of the photosensitive drum 4 than the force receiving portion (contact force receiving portion) 510e.
- the separation control member 540 the first force applying surface (separation force applying section) 540b and the second force applying surface (contact force applying section) 540c are formed into one protrusion that projects toward the process cartridge P.
- the control unit 540a can be provided at one location. Therefore, the rigidity required when the first force applying surface 540b and the second force applying surface 540c act on the process cartridge P can be provided in one place in the control part 540a, and the entire separation control member 540 or the control The portion 540a can be downsized. Thereby, the device main body 502 can be downsized. Further, by reducing the volume of the separation control member 540 itself, costs can be reduced.
- the separation control member 540 when the separation control member 540 is at the home position, no load is applied to the control unit 540a from the process cartridge P, so that the rigidity required for the separation control member 540 and the mechanism for operating the separation control member 540 can be reduced. , can be downsized. Furthermore, since the load on the sliding portion of the mechanism for operating the separation control member 540 is reduced, wear of the sliding portion and generation of abnormal noise can be suppressed.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electrophotography Configuration And Component (AREA)
- Dry Development In Electrophotography (AREA)
Abstract
[課題]従来技術を更に発展させる。 [解決手段]カートリッジは、第1ユニットと、第2ユニットと、保持部と、当接力受け部と、を有する。前記当接力受け部は、待機位置、第1稼働位置、及び、第2稼働位置、をとることが可能である。前記保持部は、前記第2ユニットが離間位置、前記保持部が第1位置、且つ前記当接力受け部が前記第1稼働位置にある状態から、前記当接力受け部が当接力を受けて前記第2稼働位置へ所定方向に移動することで、前記第1位置から第2位置へ移動する。
Description
本開示は、電子写真方式を採用する複写機やプリンタ等の画像形成装置に装着又は取り外し可能なカートリッジ及びこれを備える画像形成装置に関する。
ここで、電子写真画像形成装置(以降、「画像形成装置」ともいう)とは、電子写真画像形成方式を用いて紙などのシート状の記録媒体に画像を形成するものである。画像形成装置の例としては、複写機、ファクシミリ装置、プリンタ(レーザービームプリンタ、LEDプリンタ等)、及びこれらの複合機(マルチファンクションプリンタ)などが含まれる。
カートリッジとは、上述した画像形成装置に着脱可能なユニットであり、感光体、及び又は、感光体に作用するプロセス手段(例えば、帯電部材、現像部材、清掃部材等)を有するユニットである。
電子写真画像形成方式を用いる画像形成装置には、現像部材(現像ローラ)が感光ドラムに当接した状態で現像プロセスを行うことで画像形成を行う接触現像方式で画像形成を行う画像形成装置がある。このような画像形成装置では、現像プロセスを行っている期間は、現像ローラは所定の圧で感光ドラムに向かって付勢され、感光ドラム表面に所定の圧で当接した状態となっている。
表面に弾性層を有する現像ローラを使用する場合、例えば以下のことが考えられる。即ち、弾性層を感光ドラム表面に当接させたまま画像形成を行わない(現像ローラが回転していない)期間が長期間になると、感光ドラムの表面との当接によって現像ローラの弾性層が変形してしまう場合がある。これによって、現像プロセスを行った際に意図しない現像剤像のムラ等の画像不良が発生する場合がある。
また、他の例として、現像プロセスを行わない期間に現像ローラが感光ドラムに当接していると、現像ローラに担持された現像剤が不要に感光ドラムへ付着し、その現像剤が記録媒体に付着することで記録媒体を汚してしまう場合がある。このことは現像ローラの表面の弾性層の有無に関わらず、発生する可能性がある。
また、他の例として、感光ドラムと現像ローラとが、現像プロセスを行う期間以外の期間で当接して回転している期間が長いと、感光ドラムと現像ローラとの摺擦により、感光ドラム、現像ローラ、又は現像剤の劣化が促進される場合がある。このことは現像ローラの表面の弾性層の有無に関わらず、発生する可能性がある。
上述した場合などに対応できるよう、特開2007−213024号公報、特開2014−67005号公報には、現像プロセスが行われない期間等に、感光ドラムの表面から現像ローラを離間させるための構造を画像形成装置及びカートリッジに設けた構成が開示されている。
しかしながら、特開2007−213024号公報、特開2014−67005号公報に記載された従来の技術には更なる改良の余地が残されている。そこで、本開示は、従来の技術を更に発展させることを目的とする。
本発明の第1の態様によると、カートリッジであって、感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、前記第1枠体又は前記第2枠体に移動可能に支持された当接力受け部であって、前記第2ユニットが前記離間位置にある時に、前記第2ユニットを前記現像位置へ移動させるために、前記保持部を前記第1位置から前記第2位置へ向かって移動させるための当接力を受けることが可能な当接力受け部と、を有し、前記当接力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、前記保持部は、前記第2ユニットが前記離間位置、前記保持部が前記第1位置、且つ前記当接力受け部が前記第1稼働位置にある状態から、前記当接力受け部が当接力を受けて前記第2稼働位置へ前記所定方向に移動することで、前記第1位置から前記第2位置へ移動する、カートリッジである。
また、本発明の第2の態様によると、カートリッジであって、感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、前記第1枠体又は前記第2枠体に移動可能に支持された離間力受け部であって、前記第2ユニットが前記現像位置にある時に、前記第2ユニットを前記離間位置へ移動させるために、前記保持部を前記第2位置から前記第1位置へ向かって移動させるための離間力を受けることが可能な離間力受け部と、を有し、前記離間力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、前記保持部は、前記第2ユニットが前記現像位置、前記保持部が前記第2位置、且つ前記離間力受け部が前記第2稼働位置にある状態から、前記離間力受け部が離間力を受けて前記第1稼働位置へ前記所定方向に移動することで、前記第2位置から前記第1位置へ移動する、カートリッジである。
本開示によれば、従来技術を更に発展させることができる。
図1はプロセスカートリッジの側面図。
図2は画像形成装置の断面図。
図3はプロセスカートリッジの断面図。
図4は画像形成装置の断面図。
図5は画像形成装置の断面図。
図6は画像形成装置の断面図。
図7はトレイの部分拡大図。
図8は記憶素子押圧ユニットおよびカートリッジ押圧ユニットの斜視図。
図9は画像形成装置の斜視図。
図10はプロセスカートリッジの側面図(一部断面図)。
図11は画像形成装置の断面図。
図12は現像離間制御ユニットの斜視図。
図13はプロセスカートリッジの分解斜視図。
図14はプロセスカートリッジの斜視図。
図15はプロセスカートリッジの分解斜視図。
図16はプロセスカートリッジの分解斜視図。
図17はスペーサを示す図。
図18は移動部材を示す図。
図19はプロセスカートリッジの斜視図。
図20はプロセスカートリッジの側面の部分拡大図。
図21はプロセスカートリッジの側面の部分拡大図。
図22はプロセスカートリッジの駆動側の下面図。
図23は画像形成装置本体内のプロセスカートリッジの側面図。
図24は画像形成装置本体内のプロセスカートリッジの側面図。
図25は画像形成装置本体内のプロセスカートリッジの側面図。
図26は画像形成装置本体内のプロセスカートリッジの側面図。
図27は画像形成装置本体内のプロセスカートリッジの側面図。
図28はスペーサを示す図。
図29は移動部材を示す図。
図30はプロセスカートリッジの斜視図。
図31はプロセスカートリッジの側面図(一部断面図)。
図32はプロセスカートリッジの側面の部分拡大図。
図33はプロセスカートリッジの側面の部分拡大図。
図34はプロセスカートリッジの側面図(一部断面図)。
図35は画像形成装置本体内のプロセスカートリッジの側面図(一部断面図)。
図36は画像形成装置本体内のプロセスカートリッジの側面図(一部断面図)。
図37は画像形成装置本体内のプロセスカートリッジの側面図(一部断面図)。
図38は画像形成装置本体内のプロセスカートリッジの側面図(一部断面図)。
図39は画像形成装置本体内のプロセスカートリッジの側面図(一部断面図)。
図40はプロセスカートリッジの側面の部分拡大図。
図41はプロセスカートリッジの側面の部分拡大図。
図42はプロセスカートリッジの斜視図と感光ドラムに対する現像ローラの離間量を示す模式図。
図43はプロセスカートリッジの斜視図と感光ドラムに対する現像ローラの離間量を示す模式図。
図44はプロセスカートリッジの斜視図と感光ドラムに対する現像ローラの離間量を示す模式図。
図45はプロセスカートリッジの斜視図と感光ドラムに対する現像ローラの離間量を示す模式図。
図46はプロセスカートリッジの斜視図と感光ドラムに対する現像ローラの離間量を示す模式図。
図47は移動部材を示す図。
図48は移動部材とスペーサと非駆動側軸受の関係を示す図。
図49は画像形成装置本体内のプロセスカートリッジの側面図と移動部材とスペーサの関係を示す図。
図50は画像形成装置本体内のプロセスカートリッジの側面図。
図51は画像形成装置本体内のプロセスカートリッジの部分斜視図。
図52は画像形成装置本体内のプロセスカートリッジの側面図。
図53は画像形成装置本体内のプロセスカートリッジの側面図と移動部材とスペーサの関係を示す図。
図54は現像ユニットの斜視図。
図55はプロセスカートリッジの斜視図。
図56はプロセスカートリッジの側面の部分拡大図。
図57は移動部材と非駆動側軸受の関係を示す図。
図58は移動部材を示す図。
図59は移動部材を示す図。
図60は移動部材の動作を示す図。
図61は移動部材の動作を示す図。
図62は移動部材の動作を示す図。
図63は移動部材の動作を示す図。
図64は移動部材の動作を示す図。
図65はプロセスカートリッジの現像ユニット部分の斜視図。
図66はプロセスカートリッジの斜視図。
図67はプロセスカートリッジの分解斜視図。
図68はプロセスカートリッジの分解斜視図。
図69はプロセスカートリッジの側面図。
図70はプロセスカートリッジの側面図。
図71は画像形成装置本体内のプロセスカートリッジの側面図。
図72は画像形成装置本体内のプロセスカートリッジの側面図。
図73はプロセスカートリッジの側面図。
図74はトレイへのプロセスカートリッジ装着を表す図。
図75は画像形成装置本体内のプロセスカートリッジの側面図。
図76は画像形成装置本体内のプロセスカートリッジの側面図。
図77は画像形成装置本体内のプロセスカートリッジの側面図。
図78は画像形成装置本体内のプロセスカートリッジの側面図。
図79はプロセスカートリッジの側面図。
図80はプロセスカートリッジの分解斜視図。
図81はプロセスカートリッジの分解斜視図。
図82は画像形成装置本体内のプロセスカートリッジの側面図。
図83は画像形成装置本体内のプロセスカートリッジの側面図。
図84は画像形成装置本体内のプロセスカートリッジの側面図。
図85は画像形成装置本体内のプロセスカートリッジの側面図。
図86は画像形成装置本体内のプロセスカートリッジの側面図。
図87は画像形成装置本体内のプロセスカートリッジの側面図。
図88は画像形成装置本体内のプロセスカートリッジの側面図。
図89は画像形成装置本体内のプロセスカートリッジの側面図。
図90は画像形成装置本体内のプロセスカートリッジの側面図。
図91は画像形成装置本体内のプロセスカートリッジの側面図。
図92は画像形成装置本体内のプロセスカートリッジの側面図。
図93は画像形成装置本体内のプロセスカートリッジの側面図。
図94は画像形成装置本体内のプロセスカートリッジの側面図。
図95は画像形成装置本体内のプロセスカートリッジの側面図。
図96は画像形成装置本体内のプロセスカートリッジの側面図。
図97は画像形成装置本体内のプロセスカートリッジの側面図。
図98は画像形成装置本体内のプロセスカートリッジの側面図。
図99は画像形成装置本体内のプロセスカートリッジの側面図。
図100は画像形成装置本体内のプロセスカートリッジの側面図。
図101は画像形成装置本体内のプロセスカートリッジの側面図。
図102はプロセスカートリッジの分解斜視図。
図103は画像形成装置本体内のプロセスカートリッジの断面図。
図104は画像形成装置本体内のプロセスカートリッジの断面図。
図105は画像形成装置本体内のプロセスカートリッジの断面図。
図106は画像形成装置本体内のプロセスカートリッジの断面図。
図107は画像形成装置本体内のプロセスカートリッジの断面図。
図108は現像駆動入力ギアユニットの分解斜視図。
図109は現像駆動入力ギアユニットの断面図。
図110は現像駆動入力ギアユニットの断面図。
図111はプロセスカートリッジの断面図。
図112はプロセスカートリッジの斜視図。
図113はプロセスカートリッジの断面図。
図114はプロセスカートリッジの短手方向に沿って見た側面図。
図115はプロセスカートリッジの短手方向に沿って見た側面図。
図116はプロセスカートリッジの分解斜視図。
図117は移動部材を示す図。
図118は現像カバー部材と移動部材の斜視図。
図119は現像カバー部材と離間当接機構を示す図。
図120は画像形成装置本体内のプロセスカートリッジの側面図と短手方向に沿って見た側面図。
図121は画像形成装置本体内のプロセスカートリッジの側面図と短手方向に沿って見た側面図。
図122は画像形成装置本体内のプロセスカートリッジの側面図。
図123は画像形成装置本体内のプロセスカートリッジの側面図。
図124は画像形成装置本体内のプロセスカートリッジの側面図。
図125は画像形成装置本体内のプロセスカートリッジの側面図。
図126はプロセスカートリッジの分解斜視図。
図127は画像形成装置本体内のプロセスカートリッジの短手方向に沿って見た側面図。
図128は画像形成装置本体内のプロセスカートリッジの短手方向に沿って見た側面図。
図129はプロセスカートリッジの断面図。
図130は画像形成装置の概略断面図。
図131はプロセスカートリッジの概略断面図。
図132はプロセスカートリッジの分解斜視図。
図133は画像形成装置の概略断面図。
図134は画像形成装置の概略断面図。
図135はスペーサを示す図。
図136はプロセスカートリッジの分解斜視図。
図137はプロセスカートリッジの斜視図。
図138は画像形成装置本体内のプロセスカートリッジの断面図。
図139は画像形成装置本体内のプロセスカートリッジの断面図。
図140は画像形成装置本体内のプロセスカートリッジの断面図。
図141は画像形成装置本体内のプロセスカートリッジの断面図。
図142は離間制御部材の配置を表す図。
図143は画像形成装置本体内のプロセスカートリッジの断面図。
図144は画像形成装置本体内のプロセスカートリッジの断面図。
図145は駆動側カートリッジカバー部材とスペーサを示す図。
図146は感光ドラムと現像ローラの位置関係を示す図。
図147はプロセスカートリッジの断面図。
図148はプロセスカートリッジの断面図。
図149は画像形成装置本体内のプロセスカートリッジの断面図。
図150は感光ドラムと現像ローラの駆動関係を示す図。
図151は感光ドラムと現像ローラの駆動関係を示す図。
図152は画像形成装置本体内のプロセスカートリッジの断面図。
図153は画像形成装置本体内のプロセスカートリッジの断面図(X−X断面)。
図154は画像形成装置本体内のプロセスカートリッジの断面図。
図155は画像形成装置本体内のプロセスカートリッジの断面図。
図156は画像形成装置本体内のプロセスカートリッジの断面図。
図157は画像形成装置本体内のプロセスカートリッジの断面図。
図158は駆動側カートリッジカバー部材とスペーサを示す斜視図。
図159は画像形成装置本体内のプロセスカートリッジの断面図。
図160は画像形成装置本体内のプロセスカートリッジの断面図。
図161は移動部材とスペーサの関係を示す図。
図162はプロセスカートリッジの断面図。
図163は移動部材とスペーサの関係を示す図。
図164はプロセスカートリッジの断面図。
図165はプロセスカートリッジの側面図。
図166はプロセスカートリッジの分解斜視図。
図167はプロセスカートリッジの分解斜視図。
図168は現像側係合部の斜視図。
図169はドラム側係合部の斜視図。
図170はプロセスカートリッジの斜視図。
図171は画像形成装置本体内のプロセスカートリッジの側面図。
図172はプロセスカートリッジの部分上視図。
図173はロセスカートリッジの斜視図。
図174は画像形成装置本体内のプロセスカートリッジの側面図。
図175は画像形成装置本体内のプロセスカートリッジの側面図。
図176はプロセスカートリッジの部分上視図。
図177はロセスカートリッジの斜視図。
図178は画像形成装置本体内のプロセスカートリッジの側面図。
図179は画像形成装置本体内のプロセスカートリッジの断面図。
図180は画像形成装置本体内のプロセスカートリッジの断面図。
図181は駆動側カートリッジカバーの斜視図。
図182は画像形成装置本体内のプロセスカートリッジの断面図。
図183は画像形成装置本体内のプロセスカートリッジの断面図。
図184は画像形成装置本体内のプロセスカートリッジの断面図。
図185は画像形成装置本体内のプロセスカートリッジの断面図。
図186は画像形成装置本体内のプロセスカートリッジの断面図。
図187は画像形成装置本体内のプロセスカートリッジの断面図。
図188は画像形成装置本体内のプロセスカートリッジの断面図。
図189は画像形成装置本体内のプロセスカートリッジの断面図。
図190は画像形成装置本体内のプロセスカートリッジの断面図。
図191は画像形成装置本体内のプロセスカートリッジの断面図。
図192は画像形成装置本体内のプロセスカートリッジの断面図。
図193は付勢部材の動作を示す図。
図194は画像形成装置本体内のプロセスカートリッジの断面図。
図195は画像形成装置本体内のプロセスカートリッジの断面図。
図196は画像形成装置本体内のプロセスカートリッジの断面図。
図197は画像形成装置本体内のプロセスカートリッジの断面図。
図198は画像形成装置本体内のプロセスカートリッジの断面図。
図199は画像形成装置本体内のプロセスカートリッジの断面図。
図200は画像形成装置本体内のプロセスカートリッジの断面図。
図201は保持部材の動作を示す図。
図202は保持部材の動作を示す図。
図203は保持部材の動作を示す図。
図204はプロセスカートリッジとトレイの部分斜視図。
図205はプロセスカートリッジとトレイの部分斜視図。
図206はトレイの斜視図。
図207はプロセスカートリッジの断面図。
図208は画像形成装置本体内のプロセスカートリッジの断面図。
図209は画像形成装置本体内のプロセスカートリッジの断面図。
図210はプロセスカートリッジの力受け部と離間制御部材との関係を示す図。
図211は画像形成装置本体内のプロセスカートリッジの断面図。
図212はプロセスカートリッジの力受け部と離間制御部材との関係を示す図。
図213はプロセスカートリッジの力受け部と離間制御部材との関係を示す図。
図214はプロセスカートリッジの力受け部と離間制御部材との関係を示す図。
図215はトレイの斜視図。
図216はトレイの斜視図。
図217はプロセスカートリッジの分解斜視図。
図218はプロセスカートリッジの分解斜視図。
図219はプロセスカートリッジの斜視図。
図220はプロセスカートリッジの斜視図。
図221はトレイに現像カートリッジを装着する動作を示す図。
図222はトレイに現像カートリッジを装着する動作を示す図。
図223は現像カートリッジを装着したトレイの斜視図。
図224は現像カートリッジを装着したトレイの斜視図。
図225は画像形成装置本体内におけるトレイと現像カートリッジの側面。
図226は画像形成装置本体内における現像カートリッジの側面図。
図227は画像形成装置本体内における現像カートリッジの側面図。
図228は画像形成装置本体内における現像カートリッジの側面図。
図229は画像形成装置本体内における現像カートリッジの側面図。
図230はトレイにドラムカートリッジと現像カートリッジを装着する動作を示す図。
図231はトレイにドラムカートリッジと現像カートリッジを装着する動作を示す図。
図232はトレイにドラムカートリッジと現像カートリッジを装着する動作を示す図。
図233はドラムカートリッジと現像カートリッジを装着したトレイの側面図。
図234はドラムカートリッジと現像カートリッジを装着したトレイの側面図。
図235はプロセスカートリッジの側面図(一部断面図)。
図236はプロセスカートリッジの概略断面図。
図237はプロセスカートリッジの概略断面図。
図238はプロセスカートリッジの概略断面図。
図239はプロセスカートリッジの概略断面図。
図240はプロセスカートリッジの概略断面図。
図241はプロセスカートリッジの概略断面図。
図242は画像形成装置本体内における現像カートリッジの側面図。
図243は画像形成装置本体内における現像カートリッジの側面図。
図244は画像形成装置本体内における現像カートリッジの側面図。
図245は画像形成装置本体内における現像カートリッジの側面図。
図246は実施例27に係るプロセスカートリッジを示す斜視図。
図247はプロセスカートリッジの非駆動側を示す分解斜視図。
図248はプロセスカートリッジの非駆動側を示す斜視図。
図249はプロセスカートリッジの非駆動側を示す正面図。
図250はプロセスカートリッジの非駆動側を示す断面図。
図251は非駆動側軸受に組付けられた加圧ユニットを示す斜視図。
図252は非駆動側軸受及び加圧ユニットを示す断面図。
図253はプロセスカートリッジがトレイに装着された様子を示す断面図。
図254は加圧ユニットを示す拡大断面図。
図255は実施例28に係るプロセスカートリッジ及びカートリッジ押圧ニットを示す斜視図。
図256はプロセスカートリッジを示す断面図。
図257はプロセスカートリッジ及びカートリッジ押圧ユニットを示す斜視図。
図258はプロセスカートリッジを示す断面図。
図259は実施例29に係るプロセスカートリッジ及びカートリッジ押圧ユニットを示す斜視図。
図260はプロセスカートリッジを示す断面図。
図261はプロセスカートリッジ及びカートリッジ押圧ユニットを示す斜視図。
図262は実施例29に係るプロセスカートリッジ及びカートリッジ押圧ユニットを示す斜視図。
図263は実施例30に係る現像ユニットの駆動側を示す図。
図264は駆動側カートリッジカバー部材、現像カバー部材、移動部材及びリンユニットを示す斜視図。
図265は現像カバー部材及び移動部材を示す斜視図。
図266は現像カバー部材を示す斜視図。
図267は移動部材を示す斜視図。
図268は現像カバー部材を示す側面図。
図269は駆動側カートリッジカバー部材、リンクユニット及びカムユニットを示す斜視図。
図270は駆動側カートリッジカバー部材を示す斜視図。
図271は図270(b)の破線部分を示す拡大斜視図。
図272はリンクカム及びストッパを示す図。
図273はカムユニットを示す分解斜視図。
図274はカムユニットを示す分解斜視図。
図275はカムユニットを示す断面図。
図276はカムユニットを示す斜視図。
図277は現像ユニットが当接位置に位置する際のリンクユニット及びカムユニットを示す断面図。
図278は現像ユニットが当接位置から離間位置へ移動開始する直前のリンクユニット及びカムユニットを示す断面図。
図279は現像ユニットが離間位置に位置する際のリンクユニット及びカムユニットを示す断面図。
図280は現像ユニットが離間位置から当接位置へ移動開始する直前のリンクユニット及びカムユニットを示す断面図。
図281は実施例31に係るプロセスカートリッジの保持部材及び離間ばねを示す斜視図。
図282は図281の265A−265A断面図。
図283は駆動側カートリッジカバー部材、現像カバー部材、保持部材及び離間ばねを示す分解斜視図。
図284は駆動側カートリッジカバー部材、現像カバー部材、保持部材及び離間ばねを示す分解斜視図。
図285は保持部材に作用する力を説明するための側面図。
図286は保持部材に作用する力を説明するための側面図。
図287は遅延機構を示す分解斜視図。
図288は遅延機構を示す分解斜視図。
図289は遅延機構を示す断面図。
図290は現像カップリング部に駆動が入力されていない状態の遅延機構を示す斜視図。
図291は駆動伝達状態の遅延機構を示す斜視図。
図292はレバーと駆動側カートリッジカバー部材及び現像カバー部材との配置関係を示す斜視図。
図293はレバーの位置を示す斜視図。
図294は遅延機構の動作を示す図。
図295は遅延機構の動作を示す図。
図296は遅延機構の動作を示す図。
図297は実施例32に係るプロセスカートリッジと離間当接機構を示す斜視図。
図298は離間当接機構を示す分解斜視図。
図299は離間当接機構を示す断面図。
図300は現像カバー部材を示す斜視図。
図301は保持部材を示す斜視図
図302は駆動側軸受及び被押圧部材を示す斜視図。
図303は段ギアを示す斜視図。
図304は離間当接機構の組立方法を説明するための図。
図305は移離間当接機構の組立方法を説明するための図。
図306は離間当接機構の組立方法を説明するための図。
図307は離間当接機構の組立方法を説明するための図。
図308は離間当接機構の組立方法を説明するための図。
図309は離間当接機構の組立方法を説明するための図。
図310は離間当接機構を示す側面図と断面図。
図311は離間当接機構の動作を示す図。
図312はプロセスカートリッジを示す分解斜視図。
図313は駆動側カートリッジカバー部材を示す図。
図314は画像形成装置本体側の構成を示す図。
図315は離間制御部材を示す図。
図316はカートリッジ押圧機構と離間当接機構を示す斜視図。
図317は離間当接機構の動作を示す図。
図318は離間当接機構の動作を示す図。
図319は離間当接機構の動作を示す図。
図320は離間当接機構の動作を示す図。
図321は離間当接機構の動作を示す図。
図322は離間当接機構の動作を示す図。
図323は離間当接機構の動作を示す図。
図324は離間当接機構の動作を示す図。
図325は離間当接機構の動作を示す図。
図326は離間当接機構の動作を示す図。
図327は実施例33に係る保持部材及び駆動側カートリッジカバー部材を示す斜視図。
図328は離間当接機構の動作を示す図。
図329は離間当接機構の動作を示す図。
図330は離間制御部材を示す図。
図331は離間当接機構の動作を示す図。
図332は離間当接機構の動作を示す図。
図333は離間当接機構の動作を示す図。
図334は離間当接機構の動作を示す図。
図335は離間当接機構の動作を示す図。
図336は離間当接機構の動作を示す図。
図337は離間当接機構の動作を示す図。
図338は離間当接機構の動作を示す図。
図339は離間当接機構の動作を示す図。
図340は離間当接機構の動作を示す図。
図341は実施例33の変形例に係る駆動側カートリッジカバー部材を示す斜視図。
図342は離間当接機構の動作を示す図。
図343は離間当接機構の動作を示す図。
以下の実施例において、本開示における実施形態を、例示的に説明する。ただし、以下の実施例に開示された構成、例えば、部品の機能、材質、形状、その相対配置は、特許請求の範囲と関連する形態の一例を示すものであり、特許請求の範囲をこれら実施例に開示された構成に限定する趣旨のものではない。また、以下の実施例に開示された構成が解決する課題もしくは開示された構成から得られる作用又は効果は、特許請求の範囲を限定する趣旨のものではない。
以下、本開示の実施例1について図を用いて説明する。なお、以下の実施形態では画像形成装置として、4個のプロセスカートリッジ(カートリッジ)が着脱可能なレーザービームプリンタを例示している。また、画像形成装置に装着するプロセスカートリッジの個数はこれに限定されるものではない。必要に応じて適宜設定してよい。
[画像形成装置の概略構成]
[画像形成装置の概略構成]
図2は画像形成装置Mの断面概略図である。また、図3はプロセスカートリッジ100の断面図である。この画像形成装置Mは、電子写真プロセスを用いた4色フルカラーレーザプリンタであり、記録媒体Sにカラー画像形成を行う。画像形成装置Mはプロセスカートリッジ方式であり、プロセスカートリッジを画像形成装置本体(装置本体)170に取り外し可能に装着して、記録媒体Sにカラー画像を形成するものである。
ここで、画像形成装置Mに関して、前ドア11を設けた側を正面(前面)、正面と反対側の面を背面(後面)とする。また、画像形成装置Mを正面から見て右側を駆動側、左側を非駆動側と称す。また、画像形成装置Mを正面から見て上側を上面、下側を下面とする。図2は画像形成装置Mを非駆動側から見た断面図であり、紙面手前が画像形成装置Mの非駆動側、紙面右側が画像形成装置Mの正面、紙面奥側が画像形成装置Mの駆動側となる。
また、プロセスカートリッジ100の駆動側とは、感光ドラム軸線方向(感光ドラムの回転軸線の軸線方向)に関して、後述するドラムカップリング部材(感光体カップリング部材)が配置された側である。また、プロセスカートリッジ100の駆動側とは、現像ローラ(現像部材)軸線方向(現像ローラの回転軸線の軸線方向)に関して、後述する現像カップリング部132aが配置された側である。なお、感光ドラム軸線方向と現像ローラ軸線方向は平行であり、プロセスカートリッジ100の長手方向もこれらに平行である。
画像形成装置本体170には第1のプロセスカートリッジ100Y、第2のプロセスカートリッジ100M、第3のプロセスカートリッジ100C、第4のプロセスカートリッジ100Kの4つのプロセスカートリッジ100(100Y、100M、100C、100K)が略水平方向に配置されている。
第1~第4の各プロセスカートリッジ100(100Y、100M、100C、100K)は、それぞれ同様の電子写真プロセス機構を有しており、現像剤(以下トナーと称す)の色が各々異なるものである。第1~第4のプロセスカートリッジ100(100Y、100M、100C、100K)には画像形成装置本体170の駆動出力部(詳細は後述する)から回転駆動力が伝達される。また、第1~第4の各プロセスカートリッジ100(100Y、100M、100C、100K)には画像形成装置本体170からバイアス電圧(帯電バイアス、現像バイアス等)が供給される。
図3に示すように、本実施例の第1~第4の各プロセスカートリッジ100(100Y、100M、100C、100K)は、感光ドラム104と、この感光ドラム104に作用するプロセス手段としての帯電手段を備えたドラムユニット108を有する。ここで、ドラムユニットはプロセス手段として帯電手段のみならずクリーニング手段を有する場合もある。また、第1~第4の各プロセスカートリッジ100(100Y、100M、100C、100K)は、感光ドラム104上の静電潜像を現像する現像手段を備えた現像ユニット109を有する。このように複数の感光ドラム104がほぼ一列に並んだ電子写真画像形成装置のレイアウトは、インラインレイアウトやタンデムレイアウトと呼ばれることがある。
第1~第4の各プロセスカートリッジ100のそれぞれにおいて、ドラムユニット108と現像ユニット109は互いに結合されている。プロセスカートリッジ100のより具体的な構成については後述する。
第1のプロセスカートリッジ100Yは、現像容器125内にイエロー(Y)のトナーを収容しており、感光ドラム104の表面にイエロー色のトナー像を形成する。第2のプロセスカートリッジ100Mは、現像容器125内にマゼンタ(M)のトナーを収容しており、感光ドラム104の表面にマゼンタ色のトナー像を形成する。第3のプロセスカートリッジ100Cは、現像容器125内にシアン(C)のトナーを収容しており、感光ドラム104の表面にシアン色のトナー像を形成する。第4のプロセスカートリッジ100Kは、現像容器125内にブラック(K)のトナーを収容しており、感光ドラム104の表面にブラック色のトナー像を形成する。
図1で示すように、第1~第4のプロセスカートリッジ100(100Y、100M、100C、100K)の上方には、露光手段としてのレーザスキャナユニット14が設けられている。このレーザスキャナユニット14は、画像情報に対応してレーザ光Uを出力する。そして、レーザ光Uは、プロセスカートリッジ100の露光窓110を通過して感光ドラム104の表面を走査露光する。
第1~第4のプロセスカートリッジ100(100Y、100M、100C、100K)の下方には、転写部材としての中間転写ユニット12を設けている。この中間転写ユニット12は、駆動ローラ12e、ターンローラ12c、テンションローラ12bを有し、可撓性を有する転写ベルト12aを掛け渡している。第1~第4の各プロセスカートリッジ100(100Y、100M、100C、100K)の感光ドラム104は、その下面が転写ベルト12aの上面に接している。その接触部が一次転写部である。転写ベルト12aの内側には、感光ドラム104に対向させて一次転写ローラ12dを設けている。ターンローラ12cには転写ベルト12aを介して二次転写ローラ6を当接させている。転写ベルト12aと二次転写ローラ6の接触部が二次転写部である。
中間転写ユニット12の下方には、給送ユニット4を設けている。この給送ユニット4は、記録媒体Sを積載して収容した給紙トレイ4a、給紙ローラ4bを有する。
図2における画像形成装置本体170内の左上方には、定着装置7と、排紙装置8を設けている。画像形成装置本体170の上面は排紙トレイ13としている。記録媒体Sは定着装置7に設けられた定着手段により加熱及び加圧されてトナー像が定着され、排紙トレイ13へ排出される。
[画像形成動作]
[画像形成動作]
フルカラー画像を形成するための動作は次のとおりである。第1~第4の各プロセスカートリッジ100(100Y、100M、100C、100K)の感光ドラム104が所定の速度で回転駆動される(図3矢印A方向)。転写ベルト12aも感光ドラムの回転に順方向(図2矢印C方向)に感光ドラム104の速度に対応した速度で回転駆動される。
レーザスキャナユニット14も駆動される。レーザスキャナユニット14の駆動に同期して、各プロセスカートリッジにおいて帯電ローラ105が感光ドラム104の表面を所定の極性、電位に一様に帯電する。レーザスキャナユニット14は各感光ドラム104の表面を各色の画像信号に応じてレーザ光Uで走査露光する。これにより、各感光ドラム104の表面に対応色の画像信号に応じた静電潜像が形成される。形成された静電潜像は、所定の速度で回転駆動される現像ローラ106により現像される。前記のような電子写真画像形成プロセス動作により、第1のプロセスカートリッジ100Yの感光ドラム104にはフルカラー画像のイエロー成分に対応するイエロー色のトナー像が形成される。そして、そのトナー像が転写ベルト12a上に一次転写される。
同様に第2のプロセスカートリッジ100Mの感光ドラム104にはフルカラー画像のマゼンタ成分に対応するマゼンタ色トナー像が形成される。そして、そのトナー像が、転写ベルト12a上にすでに転写されているイエロー色のトナー像に重畳されて一次転写される。同様に第3のプロセスカートリッジ100Cの感光ドラム104にはフルカラー画像のシアン成分に対応するシアン色トナー像が形成される。そして、そのトナー像が、転写ベルト12a上にすでに転写されているイエロー色、マゼンタ色のトナー像に重畳されて一次転写される。同様に第4のプロセスカートリッジ100Kの感光ドラム104にはフルカラー画像のブラック成分に対応するブラック色トナー像が形成される。そして、そのトナー像が、転写ベルト12a上にすでに転写されているイエロー色、マゼンタ色、シアン色のトナー像に重畳されて1次転写される。このようにして、転写ベルト12a上にイエロー色、マゼンタ色、シアン色、ブラック色の4色フルカラーの未定着トナー像が形成される。
一方、所定の制御タイミングで記録媒体Sが1枚ずつ分離されて給送される。その記録媒体Sは、所定の制御タイミングで二次転写ローラ6と転写ベルト12aとの当接部である二次転写部に導入される。これにより、記録媒体Sが前記二次転写部へ搬送されていく過程で、転写ベルト12a上の4色重畳のトナー像が記録媒体Sの面に順次に一括転写される。その後、記録媒体Sは、定着装置7に搬送されて記録媒体Sにトナー像を定着され、更にその後、排紙トレイ13へ排出される。
[プロセスカートリッジ着脱構成概略]
[プロセスカートリッジ着脱構成概略]
プロセスカートリッジを支持するトレイ(以下トレイと称する)171について、図1、図4~図7を用いて更に詳細に説明する。図4は前ドア11が開いた状態でトレイ171が画像形成装置本体170の内側に位置する画像形成装置Mの断面図である。図5は前ドア11が開いた状態でトレイ171が画像形成装置本体170の外側に位置し、トレイ内部にプロセスカートリッジ100が収納された状態の画像形成装置Mの断面図である。図6は前ドア11が開いた状態でトレイ171が画像形成装置本体170の外側に位置し、トレイからプロセスカートリッジ100が取り外された状態の画像形成装置Mの断面図である。図7(a)は図4の状態でトレイ171を駆動側から見た部分詳細図である。図7(b)は図4の状態でトレイ171を非駆動側から見た部分詳細図である。
図4および図5に示すように、トレイ171は、画像形成装置本体170に対して、矢印X1方向(押し込み方向)および矢印X2方向(引き出し方向)に移動可能である。すなわち、トレイ171は画像形成装置本体170に対して引き出しおよび押し込み可能に設けられ、画像形成装置本体170が水平面上に設置された状態において、トレイ171は略水平方向に移動可能に構成されている。ここで、トレイ171が画像形成装置本体170の外側に位置する状態(図5の状態)を外側位置と称す。また、前ドア11が開いた状態でトレイ171が画像形成装置本体170の内側に位置し、感光ドラム104と転写ベルト12aが離れた状態(図4の状態)を内側位置と称す。
また、トレイ171は、外側位置で、図6で示すようにプロセスカートリッジ100を取り外し可能に装着可能な装着部171aを有する。そして、トレイ171の外側位置で装着部171aに装着された各プロセスカートリッジ100は、図7で示すように駆動側カートリッジカバー部材116と、非駆動側カートリッジカバー部材117によってトレイ171に支持される。そして、プロセスカートリッジ100は、装着部171aに配置された状態で、トレイ171の移動とともに画像形成装置本体170の内側に移動する。このとき、転写ベルト12aと感光ドラム104との間に隙間を空けた状態で移動する。このため、感光ドラム104が転写ベルト12aと接触することなく、トレイ171はプロセスカートリッジ100を画像形成装置本体170の内側に移動させることができる(詳細は後述する)。
以上のように、トレイ171によって、複数のプロセスカートリッジ100をまとめて画像形成装置本体170の内側で画像形成が可能な位置に移動させることができ、また、まとめて画像形成装置本体170の外側に引き出すことができる。
[プロセスカートリッジの位置決め]
[プロセスカートリッジの位置決め]
更に詳細に、プロセスカートリッジ100の画像形成装置本体170への位置決めについて図7を用いて説明する。図7に示すように、トレイ171にはカートリッジ100を保持するための位置決め部171VR、171VLが夫々設けられている。位置決め部171VRは、それぞれ直線部171VR1、171VR2を有している。図7に示すカートリッジカバー部材116の円弧部116VR1、116VR2が前述直線部171VR1、171VR2に接触することにより、感光ドラム中心が決まる構成となっている。また、図7に示すトレイ171は回転決め凸部171KRを有している。回転決め凸部171KRが図7に示すカートリッジカバー部材116の回転決め凹部116KRと嵌合することにより、プロセスカートリッジ100の姿勢が装置本体170に対して決まる。
なお、位置決め部171VRとプロセスカートリッジ100の長手方向において中間転写ベルト12aを挟んで対向する位置(非駆動側)に、位置決め部171VL、回転決め凸部171KLが配置されている。つまり、非駆動側についてもカートリッジカバー部材117の円弧部117VL1、117VL2が位置決め部171VLに、回転決め凹部117KLが回転決め凸部171KLと係合することにより、プロセスカートリッジ100の位置が決まる。こうすることで、トレイ171に対してプロセスカートリッジ100の位置を正しく決めている。
そして、図5で示すようにトレイ171と一体になったプロセスカートリッジ100を矢印X1の方向に移動し、図4の位置まで挿入する。そして、前ドア11を矢印Rの方向に閉じる事で後述する不図示のカートリッジ押圧機構によって、プロセスカートリッジ100は押圧され、トレイ171と共に画像形成装置本体170に固定される。また、カートリッジ押圧機構の動作と連動して、転写ベルト12aが感光体4に接触する。この状態になることにより画像が形成される状態となる(図2)。
なお、本実施例においては、位置決め部171VR、及び位置決め部171VLはトレイ171の引出動作における剛性を保つ補強の役割も兼ねているため、金属板金を用いているが、これに限定するものではない。
[カートリッジ押圧機構]
[カートリッジ押圧機構]
次にカートリッジ押圧機構の詳細について図8を用いて説明する。図8(a)は図4の状態でプロセスカートリッジ100、トレイ171、カートリッジ押圧機構190、191、中間転写ユニット12のみを示している。図8(b)は図2の状態でプロセスカートリッジ100、トレイ171、カートリッジ押圧機構190、191、中間転写ユニット12のみを示している。
ここで、プロセスカートリッジ100は画像形成中に駆動力を受けつつ、更に一次転写ローラ12d(図2)からは反力を矢印Z1方向にも受けている。そのため、画像形成動作中にプロセスカートリッジが位置決め部171VR、171VLから浮くことなく安定した姿勢を保つために、プロセスカートリッジをZ2方向に押し付ける必要がある。
これらを達成させる為に、本実施例においては、画像形成装置本体170にカートリッジ押圧機構(190、191)を設けている。カートリッジ押圧機構(190、191)は非駆動側を記憶素子押圧ユニット190、駆動側をカートリッジ押圧ユニット191が担っている。以下更に詳細に説明する。
図4で示す前ドア11を閉じる事で、図8で示す記憶素子押圧ユニット190、及びカートリッジ押圧ユニット191は矢印Z2方向に降下する。記憶素子押圧ユニット190は主にプロセスカートリッジ100に設けられた記憶素子(不図示)の電気接点と接触する本体側電気接点(不図示)を有している。前ドア11と不図示のリンク機構で連動させることにより、記憶素子140と本体側電気接点の当接、非接触が可能な構成となっている。つまり、前ドア11を閉じる事で前記接点は当接し、前ドア11を開くことで前記接点は離間する構成となっている。
こうすることで、プロセスカートリッジ100がトレイ171と共に画像形成装置本体内部を移動する際に、電気接点を摺擦せず、かつプロセスカートリッジ100の挿抜軌跡から接点を退避させることで、トレイ171の挿抜を阻害しない構成となっている。この記憶素子押圧ユニット190はプロセスカートリッジ100を前述の位置決め部171VRに押し付ける役割も担っている。また、記憶素子押圧ユニット190と同様に、カートリッジ押圧ユニット191も前ドア11を閉じる動作と連動して矢印Z2方向に降下し、プロセスカートリッジ100を前述の位置決め部171VLに押し付ける役割を担っている。更に、詳細は後述するが、カートリッジ押圧機構(190、191)は後述するプロセスカートリッジ100の移動部材152L、152Rを押し下げる役割も同時に担っている。
[駆動伝達機構]
[駆動伝達機構]
次に、本実施例における本体の駆動伝達機構について、図9、図10、(便宜上、トレイ171を省略した図)を用いて説明する。図9(a)は図4もしくは図5の状態でプロセスカートリッジ100、及びトレイ171を省略した斜視図である。図9(b)は図1の状態でプロセスカートリッジ100、前ドア11及びトレイ171を省略した斜視図である。図10はプロセスカートリッジ100を駆動側から見た側面図である。
本実施例におけるプロセスカートリッジには、図10で示すように、現像カップリング部(回転駆動力受け部)132a、ドラムカップリング部材(感光体カップリング部材)143を有している。前ドア11を閉じること(図9(b)の状態)で、プロセスカートリッジ100に駆動伝達する本体側ドラム駆動カップリング180、及び本体側現像駆動カップリング185が不図示のリンク機構により矢印Y1方向に突出する構成となっている。また、前ドア11を開く(図9(a)の状態)ことで、ドラム駆動カップリング180、現像駆動カップリング185が矢印Y2方向に退避する構成となっている。プロセスカートリッジの挿抜軌跡(X1方向、X2方向)から夫々のカップリングを退避させることでトレイ171の挿抜を阻害しない構成となっている。
なお、前ドア11を閉め、画像形成装置本体170の駆動が開始される事により、前述のドラム駆動カップリング180はドラムカップリング部材143と係合する。更に本体側現像駆動カップリング185は現像カップリング部132aと係合し、プロセスカートリッジ100に駆動が伝達される。尚、プロセスカートリッジ100への駆動伝達は上述のように2か所に限らず、ドラムカップリングにのみ駆動を入力し、現像ローラに駆動を伝達する機構を備えてもよい。
[中間転写ユニット構成]
[中間転写ユニット構成]
次に、本実施形態における画像形成装置本体の中間転写ユニット12について図9を用いて説明する。本実施形態において、中間転写ユニット12は、前ドア11を閉じることで不図示のリンク機構によって、矢印R2方向に上昇し、画像形成時の位置(感光ドラム104と中間転写ベルト12aが接触する位置)まで移動する構成となっている。また、前ドア11を開くことで、中間転写ユニット12は矢印R1方向に下降し、感光ドラム2と中間転写ベルト12aは離間する。つまり、トレイ171にプロセスカートリッジ100がセットされた状態において、感光ドラム104と中間転写ベルト12aは、前ドア11の開閉動作に応じて当接、離間する。
なお、当接離間動作は、図4で示す中心点PV1を中心とした回動軌跡を描き中間転写ユニット12が上昇、下降する構成となっている。これは、PVIと同軸に配置されたギア(不図示)から力を受け中間転写ベルト12aは駆動される。そのため、前述の位置PV1を回動中心にすることでギア中心を動かさずに中間転写ユニット12を上昇、下降できる。こうする事でギアの中心を移動する必要が無くなりギアの位置を高精度に保つ事が可能となる。
以上の構成によって、プロセスカートリッジ100がトレイ171にセットされた状態で、トレイ11の挿抜の際に、感光ドラム104と中間転写ベルト12aは摺動せず、感光ドラム104の傷付きや帯電メモリによる画像劣化を防止している。
[現像離間制御ユニット]
[現像離間制御ユニット]
次に、本実施形態における画像形成装置本体の離間機構について、図8、図11、図12を用いて説明する。図11は画像形成装置Mをプロセスカートリッジ100の駆動側端面で切った断面図である。図12は現像離間制御ユニットを上方斜めから見た斜視図である。本実施形態において、現像離間制御ユニット195は現像ユニット109の一部と係合することにより、現像ユニット109の感光ドラム104に対する離間当接動作を制御している。現像離間制御ユニット195は図8で示すように画像形成装置本体170の下方に位置している。
具体的には、現像離間制御ユニット195は、現像カップリング部132a、及びドラムカップリング部材143よりも鉛直方向下方(矢印Z2方向下方)に配置されている。
また、現像離間制御ユニット195は中間転写ベルト12の感光ドラム104長手方向(Y1、Y2方向)に配置される。つまり、現像離間制御ユニット195は駆動側に現像離間制御ユニット195R、非駆動側に現像離間制御ユニット195Lを配置している。以上のように現像離間制御ユニット195を画像形成装置本体170のデットスペースに配置することで、本体の小型化を行うことができる。
現像離間制御ユニット195Rはプロセスカートリッジ100(100Y、100M、100C、100K)に対応する4つの離間制御部材(力付与部材)196Rを有している。4つの離間制御部材は略同一形状である。現像離間制御ユニット195Rは、画像形成装置本体に対して常に固定されている。しかし、不図示の制御機構により、離間制御部材196RはW41、W42方向に移動可能に構成されている。W41、W42方向は、画像形成装置本体170に装着されたプロセスカートリッジ100の配列方向と実質的に平行である。詳細な構成については後述する。
現像離間制御ユニット195Lはプロセスカートリッジ100(100Y、100M、100C、100K)に対応する4つの離間制御部材(力付与部材)196Lを有している。4つの離間制御部材は略同一形状である。現像離間制御ユニット195Lは、画像形成装置本体に対して常に固定されている。しかし、不図示の制御機構により、離間制御部材196LはW41、W42方向に移動可能に構成されている。詳細な構成については後述する。
また、現像離間制御ユニット195が現像ユニット109の一部と係合して、現像ユニット109の離間当接動作を制御するためには、現像制御ユニット196の一部と現像ユニット109の一部が鉛直方向(Z1、Z2方向)でオーバラップしている必要がある。従って、プロセスカートリッジ100がX1方向に挿入された後、上述のように鉛直方向(Z1、Z2方向)でオーバラップするためには現像器ユニットの一部(本実施例の場合は移動部材152)を突出させる必要がある(詳細は後述する)。尚、係合させる為に、前述の中間転写ユニット12と同様に現像離間制御ユニット195自身を上昇させた場合、連動する前ドア11の操作力増大や駆動列の複雑化等の課題がある。
本実施例において現像離間制御ユニット195を画像形成装置本体170に固定し、現像ユニット109の一部(移動部材152)を画像形成装置本体170の中で下方(Z2)に突出させる方式を採用する理由の一つとして、この課題に対応する為でもある。また、移動部材152を突出させる機構は、前述した記憶素子押圧ユニット190及びカートリッジ押圧ユニット191の機構をそのまま利用する為、前述のような課題が無く装置本体コストの上昇も抑えられる。
尚、現像離間制御ユニット195のユニット全体は画像形成装置本体170に固定である。しかし、移動部材152と係合して、現像ユニット109が感光ドラム104に対して離間状態(離間位置、退避位置)、当接状態(当接位置)となるように、動作を付与するために、現像離間制御ユニット195の一部は可動可能な構成である。詳細は後述する。
[プロセスカートリッジの全体構成]
[プロセスカートリッジの全体構成]
プロセスカートリッジの構成について図3、13、14を用いて説明する。図13はプロセスカートリッジ100を感光ドラム104の軸方向の一端側である駆動側からみた組立斜視図である。図14はプロセスカートリッジ100を駆動側から見た斜視図である。
本実施例において、第1から第4のプロセスカートリッジ100(100Y、100M、100C、100K)は、収容されているトナーの色やトナーの充填量や画像形成装置本体170による制御が異なる場合がある。しかし、これら4つのプロセスカートリッジは、寸法等の差異がある場合があるものの基本的な構造や果たす機能は同様で、同様の機能を発揮可能である。このため、以降では1つのプロセスカートリッジ100を代表として説明する。
プロセスカートリッジ100は、それぞれ感光ドラム(感光体)104と、感光ドラム104に作用するプロセス手段を備えている。ここで、プロセス手段は感光ドラム104を帯電させる帯電手段(帯電部材)としての帯電ローラ105、感光ドラム104にトナーを付着させて感光ドラム104に形成された潜像を現像する現像手段(現像部材)としての現像ローラ106である。現像ローラ106はその表面にトナーを担持する。なお、プロセスカートリッジ100は、更なるプロセス手段として、感光ドラム104の表面に残留する残留トナーを除去するためのクリーニング手段(クリーニング部材)としての感光ドラム104に当接するクリーニングブレードやブラシ等を備えていても良い。また更なるプロセス手段として、感光ドラム104の表面を除電する除電手段として感光ドラム104に光を照射するためのライトガイドやレンズ等の導光部材や光源等を備えていても良い。そして、プロセスカートリッジ100は、ドラムユニット(第1ユニット)108(108Y、108M、108C、108K)と現像ユニット(第2ユニット)109(109Y、109M、109C、109K)とに分かれている。
[ドラムユニットの構成]
[ドラムユニットの構成]
図3、図13に示すように、ドラムユニット108は、感光ドラム104、帯電ローラ105、第1ドラム枠体部115、及び、第1ドラム枠体部115に取り付けられ固定された第2ドラム枠体部としての駆動側カートリッジカバー部材116及び非駆動側カートリッジカバー部材117を有する。感光ドラム104は、プロセスカートリッジ100の長手方向で両端に配置された駆動側カートリッジカバー部材116、非駆動側カートリッジカバー部材117により回転軸線(回転中心)M1を中心に回転自在に支持されている。これら第1ドラム枠体部115と、第2ドラム枠体部としての駆動側カートリッジカバー部材116及び非駆動側カートリッジカバー部材117が、感光ドラム104を回転可能に支持するドラム枠体(第1枠体、又は、感光体枠体)を構成している。
駆動側カートリッジカバー部材116と非駆動側カートリッジカバー部材117については後述する。また、図13、14に示すように、感光ドラム104の長手方向の一端側には、感光ドラム104に駆動力を伝達するためのカップリング部材143が設けられている。先に説明したように、カップリング部材143は、画像形成装置本体170のドラム駆動出力部としての本体側ドラム駆動カップリング180(図9参照)と係合する。そして、画像形成装置本体170の駆動モータ(不図示)の駆動力が感光ドラム104に伝達され矢印A方向に回転される。また、感光ドラム104は長手方向他端側にドラムフランジ142を有する。帯電ローラ105は、感光ドラム104に対し接触して従動回転できるように、ドラム枠体115に支持されている。なお、回転軸線M1はプロセスカートリッジ100の長手方向及びドラムユニット108の長手方向と並行である。
[現像ユニットの構成]
[現像ユニットの構成]
現像ユニット109は、図3、13に示すように、現像ローラ106、トナー搬送ローラ(現像剤供給部材)107、現像ブレード130、現像容器125などで構成されている。現像容器125は下枠体125aと蓋部材125bにより構成される。下枠体125aと蓋部材125bは超音波溶着等で結合されている。第2の枠体である現像容器125は、現像ローラ106に供給するトナーを収納するトナー収納部129を有する。現像容器125の長手方向で両端には、駆動側軸受126、非駆動側軸受127がそれぞれ取り付けられ固定されている。そして、現像容器125は駆動側軸受126、非駆動側軸受127を介して、現像ローラ106、トナー搬送ローラ107、攪拌部材129aを回転自在に支持し、現像ブレード130を保持する。このように現像容器125、駆動側軸受126、非駆動側軸受127は、現像ローラ106を、回転軸線(回転中心)M2を中心に回転可能に支持する現像枠体(第2枠体)を構成している。
攪拌部材129aは回転することにより、トナー収納部129の中にあるトナーを攪拌する。トナー搬送ローラ(現像剤供給部材)107は、現像ローラ106と接触し、現像ローラ106の表面へトナーを供給しつつ、現像ローラ106の表面からトナーを剥ぎ取りも行う。現像ブレード130は厚さ0.1mm程度のシート状金属である弾性部材130bを、L字断面を有する金属材料である支持部材130aに溶接等で取り付けたものである。現像ブレード130は現像ローラ106周面のトナーの層厚(トナー層の厚み)を規制し、弾性部材130bと現像ローラ106との間に所定の厚みのトナー層を形成する。現像ブレード130は長手方向一端側と他端側の二箇所を、固定ビス130cにて現像容器125に取り付けられる。現像ローラ106は金属材料の芯金106cとゴム部106dから構成されている。
また、図13、14に示すように、現像ユニット109の長手方向の一端側には、現像ユニット109に駆動力を伝達するための現像カップリング部132aが設けられている。現像カップリング部132aは、画像形成装置本体170の現像駆動出力部としての本体側現像駆動カップリング185(図9参照)と係合し、画像形成装置本体170の駆動モータ(不図示)の回転駆動力を受けて回転する部材である。現像カップリング部132aが受けた駆動力は、現像ユニット109内に設けられた不図示の駆動列によって、伝達されることで、現像ローラ106を図3の矢印D方向に回転させることが可能である。現像ユニット109の長手方向一端側には、現像カップリング部132aや不図示の駆動列を支持およびカバーする現像カバー部材128が設けられている。尚、現像ローラ106の外径は感光ドラム104の外径より小さく設定されている。本実施例の感光ドラム104の外径はΦ18~Φ22の範囲で設定されており、現像ローラ106の外径はΦ8~Φ14の範囲で設定されている。この外径に設定することにより効率的な配置が可能となる。なお、回転軸線M2はプロセスカートリッジ100の長手方向及び現像ユニット109の長手方向と並行である。
[ドラムユニットと現像ユニットの組立]
[ドラムユニットと現像ユニットの組立]
図13を用いて、ドラムユニット108と現像ユニット109の組み付けについて説明する。ドラムユニット108と現像ユニット109は、プロセスカートリッジ100の長手方向両端に設けられた駆動側カートリッジカバー部材116と非駆動側カートリッジカバー部材117によって結合される。プロセスカートリッジ100の長手方向一端側に設けられた駆動側カートリッジカバー部材116には、現像ユニット109を揺動(移動)可能に支持するための、現像ユニット支持穴116aが設けられている。同様に、プロセスカートリッジ100の長手方向他端側に設けられた非駆動側カートリッジカバー部材117には、現像ユニット109を揺動可能に支持するための、現像ユニット支持穴117aが設けられている。さらに、駆動側カートリッジカバー部材116と非駆動側カートリッジカバー部材117には、感光ドラム104を回転可能に支持するためのドラム支持穴116b、117bが設けられている。ここで、一端側では駆動側カートリッジカバー部材116の現像ユニット支持穴116aに現像カバー部材128の円筒部128bの外径部を嵌合させる。他端側では非駆動側カートリッジカバー部材117の現像ユニット支持穴117aに、非駆動側軸受127の円筒部(不図示)の外径部を嵌合させる。さらに、感光ドラム104の長手方向両端を駆動側カートリッジカバー部材116のドラム支持穴116bと非駆動側カートリッジカバー部材117のドラム支持穴117bに嵌合させる。そして、駆動側カートリッジカバー部材116と非駆動側カートリッジカバー部材117は、不図示のビスや接着剤等により、ドラムユニット108に固定する。これにより、現像ユニット109は、ドラムユニット108(感光ドラム104)に対して、駆動側カートリッジカバー部材116と非駆動側カートリッジカバー部材117によって回転可能に支持される。このような構成において、現像ローラ106は、画像形成時に感光ドラム104に作用する位置に位置決め可能となっている。
以上の工程によってドラムユニット108と現像ユニット109が組立てられ、プロセスカートリッジ100として一体化された状態を図14に示す。
なお、駆動側カートリッジカバー部材116の現像ユニット支持穴116aの中心と、非駆動側カートリッジカバー部材117の現像ユニット支持穴117aの中心とを結んだ軸線を揺動軸(回転軸線、回転中心)Kと称する。ここで、一端側の現像カバー部材128の円筒部128bは現像カップリング部132aと同軸である。すなわち、現像カップリング部132aの回転軸線は揺動軸Kと同軸である。即ち、揺動軸Kは現像カップリング部132aの回転軸線Kでもある。また、揺動軸Kを中心として、現像ユニット109は回動自在に支持されている。ドラムユニット108と現像ユニット109が組立てられ、プロセスカートリッジ100として一体化された状態において、回転軸線M1、回転軸線M2、揺動軸Kは、互いに実質的に平行である。また、この状態において、回転軸線M1、回転軸線M2、揺動軸Kは、それぞれプロセスカートリッジ100の長手方向とも実質的に平行である。
[離間当接機構150の構成]
[離間当接機構150の構成]
本実施例におけるプロセスカートリッジ100の感光ドラム104と、現像ユニット109が有する現像ローラ106とが、離間および当接を行う構成について詳細に説明する。プロセスカートリッジは駆動側に離間当接機構150R、非駆動側に離間当接機構150Lを有する。図15は離間当接機構150Rを含む現像ユニット109の駆動側の組立斜視図を示す。図16は離間当接機構150Lを含む現像ユニット109の非駆動側の組立斜視図を示す。なお離間当接機構について、まず駆動側の離間当接機構150Rの詳細を説明した後、非駆動側の離間当接機構150Lの説明を行う。尚、離間当接機構については駆動側、非駆動側ほぼ同一機能を有しているため、駆動側については各部材の符号にRを付す。非駆動側については各部材の符号を駆動側と同一にして、Lを付す。
離間当接機構150Rは規制部材(保持部材)であるスペーサ151R、押圧部材(力付与部材)である移動部材152R、引っ張りバネ153を有する。離間当接機構150Lは規制部材であるスペーサ151L、押圧部材(力付与部材)である移動部材152L、引っ張りバネ153を有する。
[スペーサ151Rの詳細説明]
[スペーサ151Rの詳細説明]
ここではスペーサ(保持部材)151Rについて図17を用いて詳細に説明する。図17(a)はスペーサ151Rのプロセスカートリッジ100の駆動側長手方向から見た単品正面図である。図17(b)、図17(c)はスペーサ151Rの単品斜視図であり、図17(d)はスペーサ151Rを図17(a)中の矢印Z2方向(画像形成状態で鉛直上方向)へ見た図である。スペーサ151Rは、円環状の被支持部151Raを有し、被支持部151Raから被支持部151Raの半径方向に突出する離間保持部(保持部)151Rbを有する。離間保持部151Rbの先端は、スペーサ151Rの揺動軸Hを中心とした円弧状かつ、揺動軸Hと実質的に平行な線HAに対して角度θ1の傾斜を持つ当接面(当接部)151Rcを有する。なお角度θ1は式(1)を満足するよう設定される。
0°≦θ1≦45°・・・(1)
0°≦θ1≦45°・・・(1)
離間保持部(保持部)151Rbは、被支持部151Raと当接面151Rcとを繋ぐ部分であり、ドラムユニット108と現像ユニット109の間に挟まって現像ユニット109が離間位置を維持できるだけの剛性を有している。
また、スペーサ151Rは当接面151Rcと隣り合う被規制面(被規制部)151Rkを有する。さらに、スペーサ151Rは、被支持部151RaよりもZ2方向に突出する被規制面(被規制部)151Rdを有し、被規制面151Rdから被支持部151Raの揺動軸H方向に突出する円弧形状の被押圧面(当接時被押圧部)151Reを有する。
さらに、スペーサ151Rは、被支持部151Raと繋がる本体部151Rfを有し、本体部151Rfには被支持部151Raの揺動軸H方向に突出するばね掛け部151Rgを有する。さらに、本体部151RfにはZ2方向へ突出する自転防止部151Rmを有し、被押圧面151Reと対向する向きに自転防止面151Rnが設けられる。
[移動部材152Rの詳細説明]
[移動部材152Rの詳細説明]
ここでは移動部材152Rについて図18を用いて詳細に説明する。図18(a)は移動部材152Rをプロセスカートリッジ100の長手方向から見た単品正面図であり、図18(b)、図18(c)は移動部材152Rの単品斜視図である。
移動部材152Rは、長丸形状の長丸被支持部152Raを有する。ここで長丸被支持部152Raの長丸形状の長手方向を矢印LHとし、上方を矢印LH1、下方を矢印LH2とする。さらに長丸被支持部152Raを形成する方向をHBとする。移動部材152Rは長丸被支持部152Raの矢印LH2方向下流側に突出部(力受け部)152Rhが形成されている。なお長丸被支持部152Raと突出部152Rhは本体部152Rbによって接続されている。一方、移動部材152Rは矢印LH1方向かつ矢印LH1方向と略垂直方向に突出する被押込み部152Reを有し、その矢印LH1方向下流側に円弧形状の被押込み面(移動力受け部、稼働力受け部)152Rfを有し、上流側に押込み規制面152Rgを有する。さらに移動部材152Rは、突出部152Rhよりも矢印LH2方向上流側に本体部152Rbから延びる第一被規制面(第1被規制部)152Rvを有する。また、移動部材152Rは、第一被規制面152Rvと隣接し現像枠体押圧面(現像枠体押圧部、第2枠体押圧部)152Rqと略平行な第二被規制面152Rwを有する。
突出部152Rhは、矢印LH2方向の終端部かつ矢印LH2方向と略直交する方向に対向配置される第一力受け部(退避力受け部、離間力受け部)152Rkと第二力受け部(当接力受け部)152Rnを有する。第一力受け部152Rkおよび第二力受け部152Rnは、それぞれHB方向へ延び円弧形状を有する第一力受け面(退避力受け面、離間力受け面)152Rmおよび第二力受け面(当接力受け面)152Rpを有する。また、突出部152RhはH方向へ突出するばね掛け部152Rsと係止部152Rtを有し、係止部152Rtは第二力受け面152Rpと同一方向を向く係止面152Ruを有する。
さらに移動部材152Rは本体部152Rbの一部であり第二力受け部152Rnよりも矢印LH2方向上流側に配置され、第二力受け面152Rpと同一方向を向く現像枠体押圧面152Rqを有する。また、移動部材152Rは第一被規制面152Rvと直交し、現像枠体押圧面152Rqと対向配置されるスペーサ押圧面(押圧部)152Rrを有する。
尚、プロセスカートリッジ100が画像形成装置本体170に装着された状態では、LH1方向はZ1方向と略同一方向であり、LH2方向はZ2方向と略同一方向である。また、HB方向はプロセスカートリッジ100の長手方向と略同一である。
[離間当接機構150Rの組立]
[離間当接機構150Rの組立]
次に離間当接機構150Rの組み立てについて、図10、図15から図19を用いて説明する。図19はスペーサ151Rの組み付け後のプロセスカートリッジ100を駆動側から見た斜視図である。
前述したが図15に示すように、現像ユニット109は、駆動側カートリッジカバー部材116の現像ユニット支持穴部116aに現像カバー部材128の円筒部128bの外径部が嵌合する。これにより、現像ユニット109は、揺動軸Kを中心に感光ドラム104に対して回転可能に支持される。また、現像カバー部材128は、揺動軸Kの方向に突出する円筒状の第一支持部128cと第二支持部128kを有する。
第一支持部128cの外径はスペーサ151Rの被支持部151Raの内径と嵌合し、スペーサ151Rを回転可能に支持する。ここで、現像カバー部材128に組付けられたスペーサ151Rの揺動中心を揺動軸Hとする。現像カバー部材128は、揺動軸Hの方向に突出する第一抜け止め部128dを有する。図15に示すように、現像カバー部材128に組付けられたスペーサ151Rの揺動軸H方向の移動は、第一抜け止め部128dがスペーサ151Rと接触することで規制される。
また、第二支持部128kの外径は移動部材152Rの長丸被支持部152Raの内壁と嵌合し、移動部材152Rを回転可能かつ長丸方向に移動可能に支持する。ここで現像カバー部材128に組付けられた移動部材152Rの揺動中心を、移動部材揺動軸HCとする。図15に示すように、現像カバー部材128に組付けられた移動部材152Rの移動部材揺動軸HC方向の移動は、第二抜け止め部128mがスペーサ151Rと接触することで規制される。
図10は移動部材152Rの長丸被支持部151Raと現像カバー部材128の円筒部128bの嵌合部が見えるように、駆動側カートリッジカバー部材116の一部と現像カバー部材128の一部を部分断面線CSにて部分的に省略した断面図である。離間当接機構150Rはスペーサ151Rを、揺動軸Hを中心に図中矢印B1方向に回転するよう付勢するスペーサ部付勢部(保持部付勢部)を備え、かつ移動部材152Rを矢印B3方向に付勢する力受け部付勢部(突出部付勢部)を備える付勢部材(保持部付勢部材)としての引張りばね153を備えている。引張りばね153はコイルばねであり弾性部材である。なお矢印B3方向は、移動部材152Rの長丸被支持部152Raの長丸長手方向LH2方向(図18参照)と略平行な方向である。引張りばね153はスペーサ151Rに設けられたばね掛け部151Rgと、移動部材152Rに設けられたばね掛け部152Rsに係合・接続され、これらの間に組付けられる。引張りばね153は、スペーサ151Rのばね掛け部151Rgに図10の矢印F2方向へ力を加えることで、スペーサ151Rを矢印B1方向に回転する付勢力を与えている。さらに引張りばね153は移動部材152Rのばね掛け部152Rsに矢印F1方向へ力を加えることで、移動部材152Rを矢印B3方向(収納位置(基準位置、待機位置)へ向かう方向)に移動する付勢力を与えている。
なお、スペーサ151Rのばね掛け部151Rgと力保持部材152Rのバネ掛け部152Rsとを結ぶ線GS、移動部材152Rのばね掛け部152Rsと移動部材揺動軸HCとを結ぶ線HSとする。そして、線GSと線HSとの成す角θ2は、移動部材152Rのばね掛け部152Rsを中心に時計回りの方向を正として、以下の式(2)を満足するよう設定される。これによって移動部材152Rは、移動部材揺動軸HCを回転中心として矢印BA方向に回転するよう付勢される。
0°≦θ2≦90°・・・(2)
0°≦θ2≦90°・・・(2)
図15に示すように現像カップリング部132aが設けられた現像駆動入力ギア(現像カップリング部材)132は、現像カバー部材128の円筒部128bの内径と現像駆動入力ギア132の円筒部32bの外周面が嵌合し、加えて駆動側軸受126の支持部126aと現像駆動入力ギア132の図示しない円筒部が嵌合する。これにより、現像駆動入力ギア132は回転軸線Kを中心に回転可能に支持される。現像ローラ106の駆動側の端部には現像ローラギア131が固定され、トナー搬送ローラ(現像剤供給部材)107の駆動側の端部にはトナー搬送ローラギア133が固定されている。現像駆動入力ギア(現像カップリング部材)132は円筒外周面にギア部を備え、このギア部が現像ローラギア131やトナー搬送ローラギア133やその他のギアと噛み合い、これらに対して現像カップリング部132aで受けた回転駆動力を伝える。
本実施例ではスペーサ151Rと移動部材152Rの揺動軸Kの方向の配置について説明する。図15に示すように揺動軸Kの方向において、現像カバー部材128を挟んで駆動側カートリッジカバー部材116が配置される側(長手方向外側)にスペーサ151R、現像駆動入力ギア132が配置される側(長手方向内側)に移動部材152Rが配置される。しかし配置する位置はこれに限るものでは無く、スペーサ151Rと移動部材152Rの配置位置が入れ替わってもよく、また現像カバー部材128を基準に揺動軸K方向の一方の側へスペーサ151Rと移動部材152Rとを配置してもよい。さらにスペーサ151Rと移動部材152Rの配置順序が入れ替わってもよい。
そして現像カバー部材128は駆動側軸受126を介して、現像容器125に固定されることで現像ユニット109を形成する。なお本実施例における固定方法は、図15に示すように固定ビス145と図示しない接着剤によって固定されるが、固定方法はこれに限るものでは無く、加熱による溶着や樹脂を流し込み固める等の接合方式でもよい。
ここで図20は説明のため、図10における離間保持部151R周辺を拡大し、引張りばね153とスペーサ151Rの一部を部分断面線CS4にて部分的に省略した断面図である。移動部材152Rは前述の引張りばね153の図中F1方向の付勢力によって、移動部材152Rの第一被規制面152Rvが現像カバー部材128の第一規制面128hに接触する。また移動部材152Rの第二被規制面152Rwが現像カバー部材128の第二規制面128qに接触し位置決めされる。この位置を移動部材152R及び突出部152Rhの収納位置と称する。なお収納位置は基準位置または待機位置と称することも可能である。さらにスペーサ151Rは引張りばね153のF2方向の付勢力によって揺動軸H回りのB1方向へ回転し、スペーサ151Rの被規制面151Rdが移動部材152Rのスペーサ押圧面152Rrに接触し回転が止められる。この位置をスペーサ151Rの離間保持位置(規制位置、第1位置)と称する。
さらに、図21は説明のため図10における離間保持部151R周辺を拡大し、引張りばね153を省略した図である。本実施例に記載の離間当接機構150Rを有するプロセスカートリッジ100が物流される際において、図21のJA方向に落下された場合をここでは考える。この時、スペーサ151Rは離間保持揺動軸Hを中心に自身の重量によって矢印B2方向へ回転する力を受ける。上記理由によってB2方向へ回転し始めるとスペーサ151Rの自転防止面151Rnが移動部材152Rの係止面152Ruに当接し、B2方向の回転を抑制するようスペーサ151Rが図中F3方向へ力を受ける。これによって物流時にスペーサ151RがB2方向へ回転することを抑制することができ、感光ドラム104と現像ユニット109の離間状態が損なわれることを防止できる。
なお本実施例では、スペーサ151Rを離間保持位置に付勢し、かつ移動部材152Rを収納位置に付勢する付勢手段として引張りばね153を挙げたが、付勢手段はこれに限るものではない。例えば、ねじりコイルばね、板ばねなどを付勢手段として用いて、移動部材152Rを収納位置に、スペーサ151Rを離間保持位置に付勢してもよい。また、付勢手段の材質は金属やモールドなど、弾性を有しスペーサ151Rおよび移動部材152Rを付勢することができればよい。
以上のように、離間当接機構150Rを備えた現像ユニット109は、前述のように駆動側カートリッジカバー部材116によってドラムユニット108と一体的に結合される(図19状態)。
図19の矢印J方向から見た図を図22に示す。図15に示すように、本実施例の駆動側カートリッジカバー116は、被当接面(被当接部)116cを有する。被当接面116cは、図22に示すように揺動軸Kに対して角度θ3の傾斜を持って形成される。なお角度θ3は前述のスペーサ151Rの当接面151Rcを形成する角度θ1と同一角度であることが望ましいがこれに限るものでは無い。さらに被当接面116cは、図15、図19に示すように、駆動側カートリッジカバー部材116が現像ユニット109とドラムユニット108に組付けられる際に、離間保持位置に位置するスペーサ151Rの当接面151Rcと対向する。また被当接面116cは、後述する現像加圧ばね134による付勢力によって当接面151Rcと接触する。そして、係合面116Rcと当接面151Rcが当接すると、現像ユニット109の有する現像ローラ106と感光ドラム104との間に隙間P1だけ離間した状態で現像ユニット109の姿勢が位置決めされるように構成される。このように、スペーサ151Rによって現像ローラ106(現像部材)が感光ドラム104から隙間P1だけ離間した状態を現像ユニット109の離間位置(退避位置)と称する(図1(a)参照)。
[プロセスカートリッジ100の離間状態と当接状態(駆動側)]
[プロセスカートリッジ100の離間状態と当接状態(駆動側)]
ここでプロセスカートリッジ100の離間状態と当接状態について図1を用いて詳しく説明する。図1はプロセスカートリッジ100が画像形成装置本体170内部に装着された状態で駆動側から見た側面図である。図1(a)は現像ユニット109が感光ドラム104に対して離間した状態を表す。図1(b)は現像ユニット109が感光ドラム104に対して当接した状態を表す。
まず、スペーサ151Rが離間保持位置(第1位置)に位置して、現像ユニット109が離間位置(退避位置)に位置する状態について説明する。この状態において、離間保持部151Rbの一端である被支持部151Raが現像カバー部材128の第一支持部128cと接触し、他端である当接部151Rcが駆動側カートリッジカバー部材116の被当接面116cと接触している。また、現像加圧ばね134の作用によって第一支持部128cが被支持部151Raに向けて押圧され、当接部151Rcが被当接面116cに向けて押圧された状態となっている。このため、この状態は、駆動側カートリッジカバー部材116が、スペーサ151Rの離間保持部151Rbを介して(挟んで)、現像カバー部材128を位置決めし、安定的に保持した状態と言える。つまり、ドラムユニット108が、スペーサ151Rを介して現像ユニット109の位置決めし、安定的に保持した状態と言える。
この状態から、移動部材152Rの被押込み部152ReをZA方向へ押込む。これにより、移動部材152R及び突出部152Rhは待機位置からZA方向(稼働方向、所定方向)に直線的に移動し突出位置へ到達する。ZA方向は現像ローラ106の回転軸線M2又は感光ドラム108の回転軸線M1に直交する方向に平行な方向である。従って、突出位置にある時の突出部152Rhは、待機位置にある時の突出部152RhよりもZA方向で下流に配置されている。このため、突出位置にある時の突出部152Rhは、待機位置にある時の突出部152Rhよりも揺動軸Kから遠い位置にある。また、突出位置にある突出部152Rhは、ドラム枠体、現像枠体よりも、ZA方向に突出する(ZA方向で下流に配置される)。本実施例では、上述のように、ドラム枠体は第1ドラム枠体部115、駆動側カートリッジカバー部材116、及び非駆動側カートリッジカバー部材117であり、現像枠体は、現像容器125、駆動側軸受126、及び、非駆動側軸受127である。なお、ZA方向とは4つのプロセスカートリッジ100の配列方向、W41方向、及とW42方向と交差する方向である。
図1に示した姿勢は、図中上下方向を鉛直方向とした場合、感光ドラム104の回転軸線M1が水平で且つ感光ドラム104がプロセスカートリッジ100の中で下部に配置される状態での姿勢とも言える。この姿勢においては、突出部152Rhは、ZA方向に突出することにより、下方に突出すると言える。
また、図26、図38には画像形成装置本体170に装着された状態のプロセスカートリッジ100の姿勢を示しており、図中上下方向が画像形成装置本体170を水平面上に設置した際の鉛直方向(Z1方向、Z2方向)である。この姿勢におけるZA方向ベクトルは、鉛直方向成分を少なくとも含むベクトルである、従って、この姿勢においても突出部152Rhは、ZA方向に突出することにより、下方に突出すると言える。
移動部材152Rは、スペーサ151Rが離間保持位置(第1位置)にある状態を維持したまま、ZA方向及びその逆方向に移動可能である。このため、移動部材152R及び突出部152Rhが稼働位置にある時も、スペーサ151Rは離間保持位置(第1位置)に位置している。また、この時、スペーサ151Rの被押圧面151Reは前述のように引張りばね153によって移動部材152Rのスペーサ押圧面152Rrと当接している。そのため、第二力受け部152Rnを矢印W42方向へ押圧すると、移動部材152Rは移動部材揺動軸HCを中心に矢印BB方向へ回転し、スペーサ押圧面152Rrが被規制部151Rdを押圧することで、スペーサ151Rを矢印B2方向へ回転させる。スペーサ151Rが矢印B2方向に回転すると、当接面151Rcが被当接面116cから離れ、現像ユニット109が離間位置から揺動軸Kを中心に矢印V2方向に回転可能になる。つまり、離間位置からV2方向に現像ユニット109が回転し、現像ユニット109が有する現像ローラ106が感光ドラム104と当接する。より詳細には、現像ローラ106は金属軸(芯金)とその周りを被覆するゴム層とゴム層よりも軸線方向端部で金属軸に取り付けられたコロを備え、ゴム層及びコロの表面が感光ドラム104に接触する。ゴム層は変形するため、コロによって現像ローラ106の回転軸線M2と感光ドラム104の回転軸線M1との距離を決めることで、回転軸線M2と回転軸線M1の距離を精度良く保つことができる。
ここで、現像ローラ106と感光ドラム104が当接する現像ユニット109の位置を当接位置(現像位置)と称する(図1(b)の状態)。現像ローラ106が感光ドラム104と当接する当接位置(現像位置)とは、現像ローラ106の表面と感光ドラム104の表面と接触した位置だけでなく、現像ローラ106が回転した際に現像ローラ106の表面に担持されたトナーが感光ドラム104の表面に接触可能な位置も含む。即ち、当接位置とは、現像ローラ106が回転した際に現像ローラ106の表面に担持したトナーを感光ドラム104の表面へ転移(付着)させることが可能な現像位置であると言える。なお、このスペーサ151Rの当接面151Rcが被当接面116cと離れる位置を、離間解除位置(許容位置、第2位置)と称する。現像ユニット109が当接位置に位置するとき、スペーサ151Rの規制面151Rkが駆動側カートリッジカバー116のスペーサ規制面(スペーサ部規制部)116dと当接する。これにより、スペーサ151Rは、離間保持位置へ移動することが規制され、離間解除位置に維持される。
また、駆動側軸受126は、揺動軸Kと直交する面である第一被押圧面(離間時被押圧部)126cを有している。駆動側軸受126は現像ユニット109に固定されている。このため、現像ユニット109が当接位置の状態で移動部材152Rの第一力受け部152Rkを矢印41方向へ押圧すると、現像枠体押圧面152Rqが第一被押圧面126cと当接する。これにより、現像ユニット109が揺動軸Kを中心に矢印V1方向に回転し、離間位置(退避位置)に移動する(図1(a)の状態)。ここで、現像ユニット109が当接位置から離間位置に移動するとき、第一力受け面126cが移動する方向を図1(a)、(b)に矢印W41で示す。また、矢印W41の反対方向が矢印W42であり、矢印W41と矢印W42は略水平方向(X1、X2方向)である。上述したように現像ユニット109に組付けられた移動部材152Rが有する第二力受け面152Rpは、この矢印W41方向において、駆動側軸受126の第一力受け面126cの上流側に位置する。さらに、第一力受け面126cとスペーサ151Rの被押圧面151ReはW1、W2方向において少なくとも一部が重なる位置に配置される。離間当接機構150Rの画像形成装置本体170内での詳細な動作については次に説明する。
[プロセスカートリッジ100の画像形成装置本体170への装着(駆動側)]
[プロセスカートリッジ100の画像形成装置本体170への装着(駆動側)]
次に図12、図23、図24を用いて、プロセスカートリッジ100が画像形成装置本体170に装着される際の、プロセスカートリッジ100の離間当接機構150Rと画像形成装置本体170の現像離間制御ユニット195の係合動作について説明する。なおこれらの図は説明のため、現像カバー部材128の一部と駆動側カートリッジカバー部材116の一部を、それぞれ部分断面線CS1、CS2にて部分的に省略した断面図である。
図23は、画像形成装置Mの図示しないカートリッジトレイ171にプロセスカートリッジ100が装着され、カートリッジトレイ171が第一装着位置に挿入された際の、プロセスカートリッジ100の駆動側から見た図である。この図では、プロセスカートリッジ100とカートリッジ押圧ユニット191と離間制御部材196R以外を省略している。
先に説明したように、本実施例の両像形成装置本体170は、前述のように各プロセスカートリッジ100に対応して、離間制御部材196Rを有している。離間制御部材196Rは、プロセスカートリッジ100が第一内側位置および第二内側位置に位置する際に、スペーサ151Rよりも画像形成装置本体170の下面側に配置される。離間制御部材196Rはプロセスカートリッジ100に向かって突出し、空間196Rdを介して互いに向かい合う第一力付与面(力付与部、当接力付与部)196Raと第二力付与面(退避力付与部、離間力付与部)196Rbを有する。第一力付与面196Raと第二力付与面196Rbは画像形成装置本体170下面側にて連結部196Rcを介して連結している。また離間制御部材196Rは回動中心196Reを中心として、制御板金197に回転自在に支持されている。離間部材196Rは付勢バネにより常にE1方向に付勢されている。また、制御板金197が不図示の制御機構によりW41、W42方向に移動可能に構成されることにより、離間制御部材196RはW41、W42方向に移動可能に構成される。
前述のように画像形成装置本体170の前ドア11が開状態から閉状態に移行するのと連動して、カートリッジ押圧ユニット191が矢印ZA方向へ降下し、第一力付与部191aが移動部材152Rの被押込み面152Rfと当接する。その後、第二装着位置である所定位置までカートリッジ押圧ユニット191が降下すると、移動部材152Rの突出部152RhがZA方向(稼働方向、所定方向)へ移動し、プロセスカートリッジ100のZ2方向下方へ突出する(図24の状態)。ZA方向は現像ローラ106の回転軸線M2、感光ドラム108の回転軸線M1、及び揺動軸HCに対して交差(本実施例では直交)する方向である。この位置を移動部材152R及び突出部152Rhの突出位置と称する。なお突出位置は力受け位置または稼働位置と称することも可能である。突出部152Rhは、突出位置にある時、待機位置にある時よりも現像枠体から突出している。この動作が完了すると、図24に示すように離間制御部材196Rの第一力付与面196Raと移動部材152Rの第二力受け面152Rpとの間に隙間T4が、第二力付与面196Rbと第一力受け面152Rmとの間に隙間T3が形成される。そして、移動部材152Rに対して離間制御部材196Rが作用しない第二装着位置に位置する。なお離間制御部材196Rのこの位置をホーム位置にあると言える。この時、移動部材152Rの第二力受け面152Rpと離間制御部材196Rの第一力付与面196Raは、W41、W42方向において、一部が重なるように配置されている。同じく、移動部材152Rの第一力受け面152Rmと離間制御部材196Rの第二力付与面196Rbは、W41、W42方向において、一部が重なるように配置されている。
[現像ユニットの当接動作(駆動側)]
[現像ユニットの当接動作(駆動側)]
次に、離間当接機構150Rによる、感光ドラム104と現像ローラ106が当接する動作について図24~図26を用いて詳細に説明する。なおこれらの図は説明のため、現像カバー部材128の一部と駆動側カートリッジカバー部材116の一部と駆動側軸受126の一部を、それぞれ部分断面線CS1、CS2、CS3にて部分的に省略した断面図である。
本実施例構成では、現像カップリング32は画像形成装置本体170から図24の矢印V2方向に駆動力を受け、現像ローラ106が回転する。つまり、現像カップリング32を有する現像ユニット109は、画像形成装置本体170から揺動軸Kを中心に矢印V2方向のトルク(駆動トルク)を受ける。図24に示す現像ユニット109が離間位置で、スペーサ151Rが離間保持位置にある時について説明する。この時、現像ユニット109がこの駆動トルクおよび後述する現像加圧ばね134による付勢力を受けても、スペーサ151Rの当接面151Rcが駆動側カートリッジカバー部材116の被当接面116cに当接し、現像ユニット109の姿勢は離間位置に維持される。
本実施例の離間制御部材196Rはホーム位置から、図24の矢印W42方向に移動可能に構成されている。離間制御部材196RがW42方向に移動すると、離間制御部材196Rの第二力付与面196Raと移動部材152Rの第二力受け部152Rnの第二力受け面152Rpが当接し、移動部材152Rが移動部材揺動軸HCを回転中心としてBB方向へ回転する。なお、第一力付与面196Raと第二力受け面152Rpとの接触は必ずしも面接触である必要は無く、線接触や点接触でもよい。このように第一力付与面196Raは第二力受け面152Rpへ当接力を付与する、この移動部材152RのBB方向への回転時の突出部152Rhの移動方向を第1方向と称す。さらに移動部材152RのBB方向の回転に伴って、移動部材152Rのスペーサ押圧面152Rrがスペーサ151Rの被押圧面151Reと当接しながら、スペーサ151RをB2方向へ回転させる。そしてスペーサ151Rは、当接面151Rcと被当接面116cとが離れる離間解除位置(第2位置)まで移動部材152Rによって回転される。ここで図25に示す、スペーサ151Rを離間解除位置(第2位置)に移動させる離間制御部材196Rの位置を第一位置と称する。
このように、離間制御部材196Rによってスペーサ151Rが離間解除位置(第2位置)に移動すると、現像ユニット109は画像形成装置本体170から受ける駆動トルクと後述する現像加圧ばね(付勢部)134によってV2方向に回転する。そして、現像ユニット109は、現像ローラ106と感光ドラム104が当接する当接位置まで移動する(図25の状態)。この時、引張りばね153によって矢印B1方向に付勢されるスペーサ151Rは、被規制面151Rkが駆動側カートリッジカバー部材116のスペーサ規制面116dに当接することで離間解除位置(第2位置)に維持される。その後、離間制御部材196RはW41方向へ移動しホーム位置へ戻る。この時、移動部材152Rは引張りばね153によってBA方向へ回転し、移動部材152Rの現像枠体押圧面152Rqと駆動側軸受126の第一被押圧面126cが当接した状態へ移行する(図26の状態)。この時、移動部材152R及び突出部152Rhは稼働位置にあると言える。
これによって前述の隙間T3とT4が再度形成され、移動部材152Rに対して離間制御部材196Rが作用しない位置に位置する。尚、図25の状態から図26の状態へ遷移は時間を置かずに行われる。
以上のように本実施例構成では、離間制御部材196Rがホーム位置から第一位置に移動することで、移動部材152Rへ当接力を付与し、移動部材152Rを回転させ、スペーサ151Rを離間保持位置(第1位置)から離間解除位置(第2位置)に移動させることができる。これによって現像ユニット109が離間位置から現像ローラ9と感光ドラム104が当接する当接位置まで移動することが可能となる。つまり、離間制御部材196Rから付与された当接力は、移動部材152Rを介してスペーサ151Rへ伝達されてスペーサ151Rを離間保持位置(第1位置)から離間解除位置(第2位置)に移動させ、これにより現像ユニット109を離間位置(退避位置)から当接位置(現像位置)へと移動させる。
現像ユニット109は、当接位置(現像位置)にある状態では、画像形成装置本体170から受ける駆動トルクと現像加圧ばね134によってV2方向に付勢され、現像ユニット109のドラムユニット108に対する位置は現像ローラ106が感光ドラム104に当接することで決まっている。このため、感光ドラム104は現像位置にある現像ユニット109のドラムユニット108に対する位置を決める位置決め部(第2位置決め部)と言える。また、この時現像ユニット109はドラムユニット108によって安定的に保持されていると言える。この時、離間解除位置にあるスペーサ151Rは現像ユニット109の位置決めに直接関与はしていない。しかし、スペーサ151Rは、離間保持位置から離間解除位置へ移動することにより、現像ローラ106が感光ドラム104に当接してドラムユニット108に対する現像ユニット109の位置を決めることを妨げないようにしている(許容している)。つまり、離間解除位置(第2位置)にあるスペーサ151Rは、ドラムユニット108が現像ユニット109を当接位置(現像位置)で安定的に保持できる状況を作り出していると言える。
なお、スペーサ151Rが離間解除位置(第2位置)にある時に、現像ローラ106が感光ドラム104に当接してさえいれば、ドラムユニット108に対する現像ユニット109の位置を、スペーサ151Rを介して決める構成であっても良い。この場合、例えば、駆動側カートリッジカバー部材116にスペーサ151Rの当接部151Rcとは異なる面が当接させ、駆動側カートリッジカバー部材116がスペーサ151Rを介して(挟んで)、現像カバー部材128を位置決めする構成としても良い。
尚、図26の離間制御部材196Rの位置は図24の状態と同じである。
また、この状態で画像形成装置本体170の前ドア11が閉状態から開状態に移行した場合、第一力付与部191aが矢印ZA方向の逆方向に上昇する。これに伴って、付勢部材153の作用によって移動部材152Rは矢印ZA方向の逆方向に移動する。しかし、スペーサ151Rは離間解除位置を維持したままであり、現像ユニット109も現像位置を維持したままである。
[現像ユニットの離間動作(駆動側)]
[現像ユニットの離間動作(駆動側)]
次に、離間当接機構150Rによる、現像ユニット109の当接位置から離間位置へ移動する動作について、図26、27を用いて詳細に説明する。なおこれらの図は説明のため、現像カバー部材128の一部と駆動側カートリッジカバー部材116の一部と駆動側軸受126の一部を、それぞれ部分断面線CSにて部分的に省略した断面図である。
先述したように、図26に示す状態において、移動部材152R及び突出部152Rhは稼働位置にあると言える。本実施例における離間制御部材196Rはホーム位置から図26の矢印W41方向に移動可能に構成されている。離間制御部材196RがW41方向に移動すると、第二力付与面196Rbと移動部材152Rの第一力受け部152Rkの第一力受け面152Rmが当接し、移動部材揺動軸HCを中心に移動部材152Rが矢印BA方向へ回転する。なお、第二力付与面196Rbと第一力受け面152Rmとの接触は必ずしも面接触である必要は無く、線接触や点接触でもよい。このように第二力付与面196Rbは第一力受け面152Rmへ離間力(退避力)を付与する。この移動部材152RのBA方向への回転時の突出部152Rhの移動方向を第2方向と称す。そして移動部材152Rの現像枠体押圧面152Rqが駆動側軸受126の第一被押圧面126cと当接することで、現像ユニット109は当接位置から揺動軸Kを中心に矢印V1方向へ回転する(図27の状態)。なおこの時、移動部材152Rの被押込み面152Rfは円弧形状を成しているが、この円弧の中心は揺動軸Kと一致するよう配置される。これによって現像ユニット109が当接位置から離間位置へと移動する際に、移動部材152Rの被押込み面152Rfがカートリッジカートリッジ押圧ユニット191から受ける力は揺動軸K方向を向く。このため、現像ユニット109の矢印V1方向への回転を妨げないよう動作させることができる。スペーサ151Rは、スペーサ151Rの被規制面151Rkと駆動側カートリッジカバー部材116のスペーサ規制面116dが離れ、スペーサ151Rは引張りばね153の付勢力によって矢印B1方向(離間解除位置から離間保持位置に向かう方向)に回転する。これによってスペーサ151Rは、被押圧面151Reが移動部材152Rのスペーサ押圧面152Rrと当接するまで回転し、当接することで離間保持位置(第1位置)に移行する。現像ユニット109が離間制御部材196Rによって当接位置から離間位置方向に移動し、スペーサ151Rが離間保持位置(第1位置)に位置するとき、図27に示すように当接面151Rcと被当接面116cの間には隙間T5が形成される。ここで、図27に示す、現像ユニット109を当接位置から離間位置方向に回転させ、スペーサ151Rが離間保持位置に移動可能となる位置を、離間制御部材196Rの第二位置と称する。
そしてその後、離間制御部材196Rが矢印W42方向に移動して、第二位置からホーム位置に戻る。すると、スペーサ151Rは離間保持位置を維持されたまま、現像ユニット109は画像形成装置本体170から受ける駆動トルクと後述する現像加圧ばね134によって矢印V2方向に回転し、当接面151Rcと被当接面116cが当接する。つまり、現像ユニット109はスペーサ151Rによって離間位置を維持した状態になり、現像ローラ106と感光ドラム104が隙間P1だけ離れた状態になる(図24および図1(a)の状態)。つまり、現像ユニット109は、スペーサ151Rによって、画像形成装置本体170から受ける駆動トルクと現像加圧ばね134の付勢による矢印V2方向の付勢力に抗して当接位置へ移動することが規制され、離間位置に維持される。この時、現像ユニット109はドラムユニット108によって安定的に離間位置(退避位置)で保持された状態であると言える。なおこれによって前述の隙間T3とT4が再度形成され、移動部材152Rに対して離間制御部材196Rが作用しない位置に位置する(図24の状態)。尚、図27の状態から図24の状態への遷移は時間を置かずに実行される。
以上のように本実施構成では、離間制御部材196Rがホーム位置から第二位置に移動することで、スペーサ151Rが離間解除位置から離間保持位置に移動する。そして、離間制御部材196Rが第二位置からホーム位置に戻ることで、現像ユニット109がスペーサ151Rによって離間位置を維持する状態になる。このように、離間制御部材196Rから付与された離間力は移動部材152Rを介して駆動側軸受(現像枠体の一部)126の第一被押圧面126cへ伝達されることで、現像ユニット109を当接位置から離間位置(退避位置)へと移動させ、スペーサ151Rを離間解除位置から離間保持位置へ移動させる。
現像ユニット109が離間位置(退避位置)にある状態で、現像ユニット109のドラムユニット108に対する位置は、画像形成装置本体170から受ける駆動トルクと現像加圧ばね134によってV2方向に付勢され、上述したように被支持部151Raが第一支持部128cと接触し、当接部151Rcが被当接面116cと接触することで決まっている。このため、被当接面116cは離間位置(退避位置)にある現像ユニット109を位置決めする位置決め部(第1位置決め部)と言える。そしてこの時、現像ユニット109はドラムユニット108によって安定的に保持されていると言える。また、離間保持位置(第1位置)にあるスペーサ151Rは、ドラムユニット108が現像ユニット109を離間位置(退避位置)で安定的に保持できるような状況を作り出していると言える。
また、この状態で画像形成装置本体170の前ドア11が閉状態から開状態に移行した場合、第一力付与部191aが矢印ZA方向の逆方向に上昇する。これに伴って、付勢部材153の作用によって移動部材152Rは矢印ZA方向の逆方向に移動する。しかし、スペーサ151Rは離間保持位置を維持したままであり、現像ユニット109も離間位置を維持したままである。
[スペーサLの詳細説明]
[スペーサLの詳細説明]
こ こではスペーサ151Lについて図28を用いて詳細に説明する。図28(a)はスペーサ151Lのプロセスカートリッジ100の駆動側長手方向から見た単品正面図であり、図28(b)、図28(c)はスペーサ151Lの単品斜視図である。スペーサ151Lは、円環状の被支持部151Laを有し、被支持部151Laから被支持部151Laの半径方向に突出する離間保持部(保持部)151Lbを有する。離間保持部151Lbの先端は、スペーサ151Lの揺動軸Hを中心とした円弧状の当接面(当接部)151Lcを有する。なおスペーサ151Lの揺動軸Hはスペーサ151Rの揺動軸Hと同じである。
離間保持部(保持部)151Lbは、被支持部151Laと当接面151Lcとを繋ぐ部分であり、ドラムユニット108と現像ユニット109の間に挟まって現像ユニット109が離間位置を維持できるだけの剛性を有している。
また、スペーサ151Lは当接面151Lcと隣り合う被規制面(被規制部)151Lkを有する。さらに、スペーサ151Lは、被支持部151LaよりもZ2方向に突出する被規制部151Ldを有し、被規制部151Ldから被支持部151Laの揺動軸H方向に突出する円弧形状の被押圧部(当接時被押圧部)151Leを有する。
さらに、スペーサ151Lは、被支持部151Laと繋がる本体部151Lfを有し、本体部151Lfには被支持部151Laの揺動軸H方向に突出するばね掛け部151Lgを有する。また、本体部151LfにはZ2方向へ突出する自転防止部151mを有し、被押圧部151Leと対向する向きに自転防止面151Lnが設けられる。
[移動部材Lの詳細説明]
[移動部材Lの詳細説明]
ここでは移動部材152Lについて図29を用いて詳細に説明する。図29(a)は移動部材152Lをプロセスカートリッジ100の長手方向から見た単品正面図であり、図29(b)、図29(c)は移動部材152Lの単品斜視図である。
移動部材152Lは、長丸形状の長丸被支持部152Laを有する。ここで長丸被支持部152Laの長丸形状の長手方向を矢印LHとし、上方を矢印LH1、下方を矢印LH2とする。さらに長丸被支持部152Laを形成する方向をHDとする。移動部材152Lは長丸被支持部152Laの矢印LH2方向下流側に突出部(力受け部)152Lhが形成されている。なお長丸被支持部152Laと突出部152Lhは本体部152Lbによって接続されている。一方、移動部材152Lは矢印LH1方向かつ矢印LH1方向と略垂直方向に突出する被押込み部152Leを有し、その矢印LH1方向下流側に円弧形状の被押込み面(移動力受け部、稼働力受け部)152Lfを有し、上流側に押込み規制面152Lgを有する。さらに移動部材152Lは、長丸被支持部152Laの一部であり矢印LH2方向下流側に位置する第一被規制面(第一被規制部)152Lvを有する。
突出部152Lhは、矢印LH2方向の終端部かつ矢印LH2方向と略直交する方向に対向配置される第一力受け部(退避力受け部、離間力受け部)152Lkと第二力受け部(当接力受け部)152Lnを有する。第一力受け部152Lkおよび第二力受け部152Lnは、それぞれHD方向へ延び円弧形状を有する第一力受け面(退避力受け面、離間力受け面)152Lmおよび第二力受け面(当接力受け面)152Lpを有する。また、突出部152LhはHB方向へ突出するばね掛け部152Lsと係止部152Ltを有し、係止部152Ltは第二力受け面152Lpと同一方向を向く係止面152Luを有する。
さらに移動部材152Lは本体部152Lbの一部であり第二力受け部152Lnよりも矢印LH2方向上流側に配置され、第二力受け面152Lpと同一方向を向く現像枠体押圧面(現像枠体押圧部、離間時押圧部)152Lqを有する。また、移動部材152Lは本体部152Lbの一部であり第一力受け部152Lkよりも矢印LH2方向上流側に配置され、第一力受け面152Lmと同一方向を向くスペーサ押圧面(スペーサ部押圧部、当接時押圧部)152Lrを有する。
尚、プロセスカートリッジ100か画像形成装置本体170に装着された状態では、LH1方向はZ1方向と略同一方向であり、LH2方向はZ2方向と略同一方向である。また、HB方向はプロセスカートリッジ100の長手方向と略同一である。
[離間当接機構150Lの組立]
[離間当接機構150Lの組立]
次に離間機構の組み付けについて、図16、及び29から図35を用いて説明する。図30はスペーサ151Lの組み付け後のプロセスカートリッジ100を駆動側から見た斜視図である。前述したが図16に示すように、現像ユニット109は、現像ユニット支持穴部117aに円筒部127aの外径部を嵌合させることで、揺動軸Kを中心に感光ドラム104に対して回転可能に支持される。また、非駆動側軸受127は、揺動軸Kの方向に突出する円筒状の第一支持部127bと第二支持部127eを有する。
第一支持部127bの外径はスペーサ151Lの被支持部151Laの内径と嵌合し、スペーサ151Lを回転可能に支持する。ここで、非駆動側軸受127に組付けられたスペーサ151Lの揺動中心は揺動軸Hである。非駆動側軸受127は、揺動軸Hの方向に突出する第一抜け止め部127cを有する。図16に示すように、非駆動側軸受127に組付けられたスペーサ151Lの揺動軸H方向の移動は、第一抜け止め部127cがスペーサ151Lと接触することで規制される。
また、第二支持部127eの外径は移動部材152Lの長丸被支持部152Laの内壁と嵌合し、移動部材152Lを回転可能かつ長丸方向に移動可能に支持する。ここで非駆動側軸受127に組付けられた移動部材152Lの揺動中心を、移動部材揺動軸HCとする。図16に示すように、非駆動側軸受127に組付けられた移動部材152Lの移動部材揺動軸HE方向の移動は、第二抜け止め部127fがスペーサ151Lと接触することで規制される。
図31はスペーサ151Lの組み付け後のプロセスカートリッジ100を現像ユニット揺動軸H方向から見た図である。移動部材152Lの長丸被支持部151Laと非駆動側軸受127の円筒部127eの嵌合部が見えるように、非駆動側カートリッジカバー部材117の一部を部分断面線CSにて部分的に省略した断面図である。ここで離間当接機構150Lはスペーサ151Lを、揺動軸Hを中心に矢印B1方向に回転するよう付勢するスペーサ部付勢部(保持部付勢部)を備え、かつ移動部材152Lを矢印B3方向に付勢する力受け部付勢部(突出部付勢部)を備える付勢部材(保持部付勢部材)としての引張りばね153を備えている。引張りばね153はコイルバネであり弾性部材である。なお矢印B3方向は、移動部材152Lの長丸被支持部152Laの長丸長手方向LH2方向(図29参照)と略平行な方向である。引張りばね153は、スペーサ151Lに設けられたばね掛け部151Lgと、移動部材152Lに設けられたばね掛け部152Lsに係合・接続され、これらの間に組付けられる。引張りばね153は、スペーサ151Lのばね掛け部151Lgに図31の矢印F2方向へ力を加えることで、スペーサ151Lを矢印B1方向に回転する付勢力を与えている。さらに引張りばね153は移動部材152Lのばね掛け部152Lsに矢印F1方向へ力を加えることで、移動部材152Lを矢印B3方向(収納位置(基準位置、待機位置)へ向かう方向)に移動する付勢力を与えている。
スペーサ151Lのばね掛け部151Lgと力保持部材152Lのばね掛け部152Lsとを結ぶ線GSとし、移動部材152Lのばね掛け部152Lsと移動部材揺動軸HEとを結ぶ線HSとする。すると、線GSと線HSとの成す角θ3は、移動部材152Lのばね掛け部152Lsを中心に反時計回りの方向を正として、以下の式(3)を満足するよう設定される。これによって移動部材152Lは、移動部材揺動軸HEを回転中心として図中BA方向に回転するよう付勢される。
0°≦θ3≦90°・・・(3)
0°≦θ3≦90°・・・(3)
スペーサ151Lと移動部材152Lの取付け位置は、図29に示すように揺動軸Kの方向において、非駆動側軸受127の非駆動側カートリッジカバー部材117が配置される側(長手方向外側)にスペーサ151Lと移動部材152Lが配置される。しかし配置する位置はこれに限るものでは無く、非駆動側軸受127の現像容器125側(長手方向内側)にそれぞれ配置してもよく、また非駆動側軸受127を挟んでスペーサ151Lと移動部材152Lとを配置してもよい。さらにスペーサ151Lと移動部材152Lの配置順序が入れ替わってもよい。
そして非駆動側軸受127は、現像容器125に固定されることで現像ユニット109を形成する。なお本実施例における固定方法は、図16に示すように固定ビス145と図示しない接着剤によって固定されるが、固定方法はこれに限るものでは無く、加熱による溶着や樹脂を流し込み固める等の接合方式でもよい。
ここで図32(a)、(b)は説明のため、図31における移動部材152Lの移動部材揺動軸HEと離間保持部151L周辺をそれぞれ拡大した断面図である。更に、図32(a)、(b)では、非駆動側カートリッジカバー部材117と引張りばね153とスペーサ151Lの一部を部分断面線CSにて部分的に省略した断面図である。移動部材152Lは、前述の引張りばね153の矢印F1方向の付勢力によって、移動部材152Lの第一被規制面152Lvが非駆動側軸受127の第二支持部127eに接触する。また図32(b)に示すように移動部材152Lの現像枠体押圧面152Lqが非駆動側軸受127の被押圧面127hに接触し位置決めされる。この位置を移動部材152Lの収納位置と称する。なお収納位置は基準位置または待機位置と称することも可能である。さらにスペーサ151Lは引張りばね153の矢印F2方向の付勢力によって揺動軸H回りの矢印B4方向へ回転し、スペーサ151Lの接触面151Lpが移動部材152Lのスペーサ押圧面152Lrに接触することで位置決めされる。この位置をスペーサ151Lの離間保持位置(規制位置)と称する。なお、移動部材152Lが後述する突出位置に移動した際には、スペーサ151Lの被押圧部151Leが移動部材152Lのスペーサ押圧面152Lrに接触することで離間保持位置に位置することができる。
さらに、図33は説明のため図31における離間保持部151L周辺を拡大し、引張りばね153を省略した図である。離間当接機構150Lを有するプロセスカートリッジ100が物流される際において、図33の矢印JA方向に落下された場合をここでは考える。この時、スペーサ151Lは離間保持揺動軸Hを中心に自身の重量によって矢印B2方向へ回転する力を受ける。上記理由によって矢印B2方向へ回転し始めるとスペーサ151Lの自転防止面151Lnが移動部材152Lの係止面152Luに当接し、矢印B2方向の回転を抑制するようスペーサ151Lが矢印F4方向へ力を受ける。これによって物流時にスペーサ151Lが矢印B2方向へ回転することを抑制することができ、感光ドラム104と現像ユニット109の離間状態が損なわれることを防止できる。
なお本実施例では、スペーサ151Lを離間保持位置に付勢し、かつ移動部材152Lを収納位置に付勢する付勢手段として引張りばね153を挙げたが、付勢手段はこれに限るものではない。例えば、ねじりコイルばね、板ばねなどを付勢手段として用いて、移動部材152Lを収納位置に、スペーサ151Lを離間保持位置に付勢してもよい。また、付勢手段の材質は金属やモールドなど、弾性を有しスペーサ151Lおよび移動部材152Lを付勢することができればよい。
以上のように、離間当接機構150Lを備えた現像ユニット109は、前述のように非駆動側カートリッジカバー部材117によってドラムユニット108と一体的に結合される(図30状態)。図16に示すように、本実施例の非駆動側カートリッジカバー部材117は、被当接面(被当接部)117cを有する。被当接面117cは揺動軸Kに実質的に平行な面である。さらに被当接面117cは、図16、図30に示すように、非駆動側カートリッジカバー部材117が現像ユニット109とドラムユニット108に組付けられる際に、離間保持位置に位置するスペーサ151Lの当接面151Lcと対向する。ここでプロセスカートリッジ100は、現像ユニット109を離間位置から当接位置へ向かって付勢して、感光ドラム104に対して現像ローラ106を当接させるための現像ユニット付勢部材(第2ユニット付勢部材)として現像加圧バネ134を有する。現像加圧バネ134は、非駆動側カートリッジカバー部材117のばね掛け部117eと、非駆動側軸受127のばね掛け部127kとの間に組付けられたコイルバネであり、弾性部材である。現像加圧バネ134の付勢力によってスペーサ151Lの当接面151Lcと非駆動側カートリッジカバー部材117の被当接面117cと接触する。そして、被当接面117ccと当接面151Lcが当接すると、現像ユニット109の有する現像ローラ106と感光ドラム104との間に隙間P1だけ離間した状態で現像ユニット109の姿勢が位置決めされるように構成される。このように、スペーサ151Lによって現像ローラ106が感光ドラム104から隙間P1だけ離間した状態を現像ユニット109の離間位置(退避位置)と称する(図35(a)参照)。
[プロセスカートリッジ100の離間状態と当接状態(非駆動側)]
[プロセスカートリッジ100の離間状態と当接状態(非駆動側)]
ここでプロセスカートリッジ100の離間状態と当接状態について図34を用いて詳しく説明する。図34はプロセスカートリッジ100が画像形成装置本体170内部に装着された状態で非駆動側から見た側面図である。図34(a)は現像ユニット109が感光ドラム104に対して離間した状態を表す。図34(b)は現像ユニット109が感光ドラム104に対して当接した状態を表す。
まず、スペーサ151Lが離間保持位置(第1位置)に位置して、現像ユニット109が離間位置(退避位置)に位置する状態について説明する。この状態において、離間保持部151Lbの一端である被支持部151Laが非駆動側軸受127の第一支持部127bと接触し、他端である当接部151Lcが非駆動側カートリッジカバー部材117の被当接面117cと接触している。また、現像加圧ばね134の作用によって第一支持部127bが被支持部151Laに向けて押圧され、当接部151Lcが被当接面117cに向けて押圧された状態となっている。このため、この状態は、非駆動側カートリッジカバー部材117(ドラムユニット108の一部を構成)が、スペーサ151Lの離間保持部151Lbを介して、非駆動側軸受127(現像ユニット109の一部を構成)を位置決めし、安定的に保持した状態と言える。
この状態から、移動部材152Lの被押込み部152Leを矢印ZA方向へ押込む。これにより、移動部材152L及び突出部152Lhは待機位置からZA方向(稼働方向)に直線的に移動し突出位置へ到達する。ZA方向は現像ローラ106の回転軸線M2、感光ドラム108の回転軸線M1、及び、揺動軸HEに対して交差(本実施例では直交)する方向である。従って、突出位置にある時の突出部152Lhは、待機位置にある時の突出部152LhよりもZA方向で下流に配置されている。このため、突出位置にある時の突出部152Lhは、待機位置にある時の突出部152Lhよりも揺動軸Kから遠い位置にある。また、突出位置にある突出部152Lhは、ドラム枠体、現像枠体よりも、ZA方向に突出する(ZA方向で下流に配置される)。本実施例では、ドラム枠体は、第1ドラム枠体部115、駆動側カートリッジカバー部材116、及び非駆動側カートリッジカバー部材117であり、現像枠体は、現像容器125、駆動側軸受126、及び、非駆動側軸受127である。なお突出位置は力受け位置または稼働位置と称することも可能である。
移動部材152Lは、スペーサ151Lが離間保持位置(第1位置)にある状態を維持したまま、ZA方向及びその逆方向に移動可能である。このため、移動部材152L及び突出部152Lhが稼働位置にある時も、スペーサ151Lは離間保持位置(第1位置)に位置している。スペーサ151Lの被押圧部151Leは前述のように引張りばね153によって移動部材152Lのスペーサ押圧面152Lrと当接している。そのため、第二力受け部152Ln(第二力受け面152Lp)を矢印W42方向へ押圧すると、移動部材152Lは移動部材揺動軸HEを中心に矢印BD方向へ回転し、スペーサ押圧面152Lrが被押圧部151Leを押圧することで、スペーサ151Lを矢印B5方向へ回転させる。スペーサ151Lが矢印B5方向に回転すると、当接面151Lcが被当接面117cから離れ、現像ユニット109が離間位置から揺動軸Kを中心に矢印V2方向に回転可能になる。つまり、離間位置からV2方向に現像ユニット109が回転し、現像ユニット109が有する現像ローラ106が感光ドラム104と当接する。ここで、現像ローラ106と感光ドラム104が当接する現像ユニット109の位置を当接位置(現像位置)と称する(図34(b)の状態)。なお、このスペーサ151Lの当接面151Lcが被当接面117cと離れる位置を、離間解除位置(許容位置、第2位置)と称する。現像ユニット109が当接位置に位置するとき、スペーサ151Lの規制面151Lkが駆動側カートリッジカバー116のスペーサ規制面(スペーサ部規制部)117dと当接することで、スペーサ151Lは離間解除位置に維持される。
また、本実施例の非駆動側軸受127は、揺動軸Kと直交する面である被押圧面(離間時被押圧部)127hを有している。非駆動側軸受127は現像ユニット109に固定されている。このため、現像ユニット109が当接位置にある状態で移動部材152Lの第一力受け部152Lk(第一力受け面152Lm)を矢印41方向へ押圧すると、現像枠体押圧面152Lqが被押圧面127hと当接する。これにより、現像ユニット109が揺動軸Kを中心に矢印V1方向に回転し、離間位置に移動する(図34(a)の状態)。ここで、現像ユニット109が当接位置から離間位置に移動するとき、被押圧面127hが移動する方向を図34(a)、(b)中に矢印W41で示す。また、矢印W41の反対方向が矢印W42であり、矢印W41と矢印W42は略水平方向(X1、X2方向)である。上述したように現像ユニット109に組付けられた移動部材152Lが有する第二力受け面152Lpは、この矢印W41方向において、非駆動側軸受127の被押圧面127hの上流側に位置する。さらに、被押圧面127hとスペーサ151Lの被押圧部151LeはW1、W2方向において少なくとも一部が重なる位置に配置される。離間当接機構150Lの画像形成装置本体170内での動作については次に説明する。
[プロセスカートリッジ100の画像形成装置本体170への装着(非駆動側)]
[プロセスカートリッジ100の画像形成装置本体170への装着(非駆動側)]
次に図35と図36を用いて、プロセスカートリッジ100が画像形成装置本体170に装着される際の、プロセスカートリッジ100の離間当接機構150Lと画像形成装置本体170の現像離間制御ユニット196Lの係合動作について説明する。なおこれらの図は説明のため、現像カバー部材128の一部と非駆動側カートリッジカバー部材117の一部を、それぞれ部分断面線CSにて部分的に省略した断面図である。図35は、画像形成装置Mの図示しないカートリッジトレイ171にプロセスカートリッジ100が装着され、カートリッジトレイ171が第一装着位置に挿入された際の、プロセスカートリッジ100の駆動側から見た図である。図35では、プロセスカートリッジ100とカートリッジ押圧ユニット190と離間制御部材196L以外を省略している。
先に説明したように、本実施例の画像形成装置本体170は、前述のように各プロセスカートリッジ100に対応して、離間制御部材196Lを有している。離間制御部材196Lは、プロセスカートリッジ100が第一内側位置および第二内側位置に位置する際に、スペーサ151Lよりも画像形成装置本体170の下面側に配置される。離間制御部材196Lはプロセスカートリッジ100に向かって突出し、空間196Rdを介して互いに向かい合う第一力付与面(力付与部)196Laと第二力付与面(退避力付与部)196Lbを有する。第一力付与面196Raと第二力付与面196Rbは画像形成装置本体170下面側にて連結部196Rcを介して連結している。また離間制御部材196Rは回動中心196Reを中心として、制御板金197に回転自在に支持されている。離間部材196Rは付勢バネにより常にE1方向に付勢されている。また、制御板金197が不図示の制御機構によりW41、W42方向に移動可能に構成されることにより、離間制御部材196RはW41、W42方向に移動可能に構成される。
前述のように画像形成装置本体170の前ドア11が開状態から閉状態に移行するのと連動して、カートリッジ押圧ユニット190が矢印ZA方向へ降下し、第一力付与部190aが移動部材152Lの被押込み面152Lfと当接する。その後第二装着位置である所定位置までカートリッジ押圧ユニット190が降下すると、移動部材152Lの突出部152Lhがプロセスカートリッジ100のZ2方向下方へ突出する突出位置へ移動する(図36の状態)。この動作が完了すると、図36に示すように離間制御部材196Lの第一力付与面196Laと移動部材152Lの第二力受け面152Lpとの間に隙間T4が、第二力付与面196Lbと第一力受け面152Lmとの間に隙間T3が形成される。そして、移動部材152Lに対して離間制御部材196Lが作用しない第二装着位置に位置する。なお離間制御部材196Lのこの位置をホーム位置と称する。この時、移動部材152Lの第二力受け面152Lpと離間制御部材196Lの第一力付与面196Laは、W1、W2方向において、一部が重なるように配置されている。同じく、移動部材152Lの第一力受け面152Lmと離間制御部材196Lの第二力付与面196Lbは、W1、W2方向において、一部が重なるように配置されている。
[現像ユニットの当接動作(非駆動側)]
[現像ユニットの当接動作(非駆動側)]
次に、離間当接機構150Lによる感光ドラム104と現像ローラ106が当接する動作について図36~図38を用いて詳細に説明する。なおこれらの図は説明のため、現像カバー部材128の一部と非駆動側カートリッジカバー部材117の一部と非駆動側軸受127の一部を、それぞれ部分断面線CSにて部分的に省略した断面図である。
先に説明したように、現像カップリング32は画像形成装置本体170から図24矢印V2方向に駆動力を受け、現像ローラ106が回転する。つまり、現像カップリング32を有する現像ユニット109は、画像形成装置本体170から揺動軸Kを中心に矢印V2方向の駆動トルクを受ける。さらに現像ユニット109は、前述の現像加圧バネ134による付勢力によって矢印V2方向へ付勢力も受けている。図36に示すように現像ユニット109が離間位置で、スペーサ151Lが離間保持位置(第1位置)にある状態について説明する。この状態では、現像ユニット109がこの駆動トルクおよび現像加圧バネ134による付勢力を受けても、スペーサ151Lの当接面151Lcが非駆動側カートリッジカバー部材117の被当接面117cに当接する。このため、現像ユニット109の姿勢は離間位置に維持される。
本実施例の離間制御部材196Lはホーム位置から、図36の矢印W41方向に移動可能に構成されている。離間制御部材196LがW41方向に移動すると、離間制御部材196Lの第一力付与面196Laと移動部材152Lの第二力受け部152Lnの第二力受け面152Lpが当接し、移動部材152Lが移動部材揺動軸HDを回転中心としてBD方向へ回転する。なお、第一力付与面196Laと第二力受け面152Lpとの当接は必ずしも面接触である必要はなく、線接触や点接触でも良い。このように第一力付与面196Laは、W41方向への移動によって、第二力受け面152Lpへ当接力を付与する。この移動部材152LのBD方向への回転時の突出部152Lhの移動方向を第1方向と称す。さらに移動部材152Lの回転に伴って、移動部材152Lのスペーサ押圧面152Lrがスペーサ151Lの被押圧部151Leと当接しながら、スペーサ151LをB5方向へ回転させる。そしてスペーサ151Lは、当接面151Lcと被当接面117cとが離れる離間解除位置(第2位置)まで移動部材152Lによって回転される。ここで図37に示す、スペーサ151Lを離間解除位置(第2位置)まで移動させる離間制御部材196Lの位置を第一位置と称する。
このように離間制御部材196Lによってスペーサ151Lが離間解除位置に移動すると、現像ユニット109は画像形成装置本体170から受ける駆動トルクと現像加圧バネ134の付勢力によってV2方向に回転する。これにより、現像ユニット109は現像ローラ106と感光ドラム104が当接する当接位置まで移動する(図37の状態)。この時、引張りばね153によって矢印B4方向に付勢されるスペーサ151Lは、被規制面151Lkが非駆動側カートリッジカバー部材117のスペーサ規制面117dに当接することで離間解除位置(第2位置)に維持される。その後離間制御部材196LはW42方向へ移動しホーム位置へ戻る。この時、移動部材152Lは引張りばね153によってBC方向へ回転し、移動部材152Lの現像枠体押圧面152Lqと非駆動側軸受127の被押圧面127hが当接した状態へ移行する(図38の状態)。この時、移動部材152L及び突出部152Lhは稼働位置にあると言える。
これによって前述の隙間T3とT4が再度形成され、移動部材152Lに対して離間制御部材196Lが作用しない位置に位置する。尚、図37の状態から図38の状態へ遷移は時間を置かずに行われる。尚、図38の離間制御部材196Lの位置は図36の状態と同じである。
また、上記では、第二力受け面152Lpが第一力付与面196Laから当接力を付与されるとした。これに関して、当接力はW41方向へ移動する第一力付与面196Laから付与される力であり、現像ローラ106を感光ドラム104に近づけて当接させるような方向(当接方向、近接方向、又はV2方向)へ移動させるためにプロセスカートリッジ100へ付与される力である。このため、当接力を受けることをきっかけとして、現像ユニット109が退避位置から現像位置へ向かって移動する構成となっていれば良く、現像ユニット109が現像位置へ到達するまでプロセスカートリッジ100が当接力を受け続ける必要は無い。また、上述したとおり、当接力を受けて現像ユニット109が退避位置から現像位置に移行した際、現像位置において現像ローラ106と感光ドラム104とが必ずしも接触している必要も無い。
以上のように本実施例の構成では、離間制御部材196Lがホーム位置から第一位置に移動することで、移動部材152Lへ当接力を付与し、移動部材152Lを回転させスペーサ151Lを離間保持位置(第1位置)から離間解除位置(第2位置)に移動させることができる。これによって現像ユニット109が離間位置から現像ローラ9と感光ドラム104が当接する当接位置まで移動することが可能となる。つまり、離間制御部材196Lから付与された当接力は、移動部材152Lを介してスペーサ151Lへ伝達されることで、現像ユニット109を離間位置(退避位置)から当接位置(現像位置)へと移動させると言える。
現像ユニット109が当接位置(現像位置)にある状態で、現像ユニット109のドラムユニット108に対する位置は、画像形成装置本体170から受ける駆動トルクと現像加圧ばね134によってV2方向に付勢され、現像ローラ106が感光ドラム104に当接することで決まっている。このため、感光ドラム104は現像位置にある現像ユニット109の現像ローラ6を位置決めする位置決め部(第2位置決め部)と言える。そしてこの時、現像ユニット109はドラムユニット108によって安定的に保持されていると言える。この時、離間解除位置にあるスペーサ151Lは現像ユニット109の位置決めに直接関与はしていない。しかし、スペーサ151Lは、離間保持位置から離間解除位置へ移動することによって、ドラムユニット108が現像ユニット109を当接位置(現像位置)で安定的に保持できるような状況を作り出していると言える。
また、この状態で画像形成装置本体170の前ドア11が閉状態から開状態に移行した場合、第一力付与部190aが矢印ZA方向の逆方向に上昇する。これに伴って、付勢部材153の作用によって移動部材152Rは矢印ZA方向の逆方向に移動する。しかし、スペーサ151Rは離間解除位置を維持したままであり、現像ユニット109も現像位置を維持したままである。
[現像ユニットの離間動作(非駆動側)]
[現像ユニットの離間動作(非駆動側)]
次に、現像ユニット109の当接位置から離間位置へ移動する動作について、図38と図39を用いて詳細に説明する。なお図39は説明のため、現像カバー部材128の一部と非駆動側カートリッジカバー部材117の一部と非駆動側軸受127の一部を、それぞれ部分断面線CSにて部分的に省略した断面図である。
先述したように、図38に示す状態において、移動部材152L及び突出部152Lhは稼働位置にあると言える。本実施例における離間制御部材196Lはホーム位置から図38の矢印W42方向に移動可能に構成されている。離間制御部材196LがW42方向に移動すると、第二力付与面196Lbと移動部材152Lの第一力受け部152Lkの第一力受け面152Lmが当接し、移動部材揺動軸HDを中心に移動部材152Lが矢印BC方向へ回転する。なお、第二力付与面196Lbと第一力受け面152Lmとの接触は必ずしも面接触である必要は無く、線接触や点接触でも良い。このように第二力付与面196Lbは第一力受け面152Lmへ離間力(退避力)を付与する。この移動部材152LのBC方向への回転時の突出部152Lhの移動方向を第2方向と称す。そして移動部材152Lの現像枠体押圧面152Lqが非駆動側軸受127の被押圧面127hと当接しているため、現像ユニット109は当接位置から揺動軸Kを中心に矢印V1方向へ回転する(図39の状態)。なおこの時、移動部材152Lの被押込み面152Lfは円弧形状を成しているが、この円弧の中心は揺動軸Kと一致するよう配置される。
これによって現像ユニット109が当接位置から離間位置へと移動する際に、移動部材152Lの被押込み面152Lfがカートリッジ押圧ユニット190から受ける力は揺動軸K方向を向く。このため、現像ユニット109の矢印V1方向への回転を妨げないよう動作させることができる。スペーサ151Lは、スペーサ151Lの被規制面151Lkと非駆動側カートリッジカバー部材117のスペーサ規制面117dが離れ、スペーサ151Lは引張りばね153の付勢力によって矢印B4方向(離間解除位置から離間保持位置に向かう方向)に回転する。これによってスペーサ151Lは、被押圧部151Leが移動部材152Lのスペーサ押圧面152LRと当接するまで回転し、当接することで離間保持位置(第1位置)に移行する。
現像ユニット109が離間制御部材196Lによって当接位置から離間位置方向に移動し、スペーサ151Lが離間保持位置に位置するとき、図39に示すように当接面151Lcと被当接面117cの間には隙間T5が形成される。ここで、現像ユニット109を当接位置から離間位置方向に回転させ、スペーサ151Lが離間保持位置に移動可能となる位置を、離間制御部材196Lの第二位置と称する。
そしてその後、離間制御部材196Lが矢印W41方向に移動して、第二位置からホーム位置に戻る。すると、スペーサ151Lは離間保持位置を維持されたまま、現像ユニット109は画像形成装置本体170から受ける駆動トルクと現像加圧バネ134の付勢力によって矢印V2方向に回転し、当接面151Lcと被当接面117cが当接する。つまり、現像ユニット109はスペーサ151Lによって離間位置を維持した状態になり、現像ローラ106と感光ドラム104が隙間P1だけ離れた状態になる(図36および図34(a)の状態)。なおこれによって前述の隙間T3とT4が再度形成され、移動部材152Lに対して離間制御部材196Lが作用しない位置に位置する(図36の状態)。尚、図39の状態から図36の状態への遷移は時間を置かずに実行される。
また、上記では、第一力受け面152Lmが第二力付与面196Lbから離間力(退避力)を付与されるとした。これに関して、離間力はW42方向へ移動する第二力付与面196Lbから付与される力であり、現像ローラ106を感光ドラム104から離れる方向(離間方向、退避方向、又はV1方向)へ移動させるためにプロセスカートリッジ100へ付与される力である。このため、離間力を受けることをきっかけとして、現像ユニット109が現像位置から退避位置へ向かって移動する構成となっていれば良く、現像ユニット109が退避位置へ到達するまでプロセスカートリッジ100が離間力を受け続ける必要は無い。
以上のように本実施例構成では、離間制御部材196Lがホーム位置から第二位置に移動することで、スペーサ151Lが離間解除位置から離間保持位置に移動する。そして、離間制御部材196Lが第二位置からホーム位置に戻ることで、現像ユニット109がスペーサ151Lによって離間位置を維持する状態になる。つまり、現像ユニット109は、スペーサ151Lによって、画像形成装置本体170から受ける駆動トルクと現像加圧ばね134の付勢による矢印V2方向の付勢力に抗して当接位置へ移動することが規制され、離間位置に維持される。
このように、離間制御部材196Lから付与された離間力は移動部材152Lを介して非駆動側軸受(現像枠体の一部)127の被押圧面127hへ伝達されることで、現像ユニット109を当接位置から離間位置(退避位置)へと移動させ、スペーサ151Rを離間解除位置から離間保持位置へ移動させる。
現像ユニット109が離間位置(退避位置)にある状態で、現像ユニット109のドラムユニット108に対する位置は、画像形成装置本体170から受ける駆動トルクと現像加圧ばね134によってV2方向に付勢され、上述したように被支持部151Laが第一支持部127bと接触し、当接部151Lcが被当接面117cと接触することで決まっている。このため、被当接面117cは感光ドラム104は離間位置(退避位置)にある現像ユニット109を位置決めする位置決め部(第1位置決め部)と言える。そしてこの時、現像ユニット109はドラムユニット108によって安定的に保持されていると言える。また、離間保持位置(第1位置)にあるスペーサ151Lは、ドラムユニット108が現像ユニット109を離間位置(退避位置)で安定的に保持できるような状況を作り出していると言える。
また、この状態で画像形成装置本体170の前ドア11が閉状態から開状態に移行した場合、第一力付与部190aが矢印ZA方向の逆方向に上昇する。これに伴って、付勢部材153の作用によって移動部材152Lは矢印ZA方向の逆方向に移動する。しかし、スペーサ151Lは離間保持位置を維持したままであり、現像ユニット109も離間位置を維持したままである。
これまで、プロセスカートリッジ100の駆動側に位置する離間機構の動作と、非駆動側に位置する離間機構の動作とを別々に説明したが、本実施例ではこれらは連動して動作する。つまり、スペーサ151Rによって現像ユニット109が離間位置に位置する際には、スペーサ151Lによって現像ユニット109が離間位置に位置することと略同時に生じており、また当接位置においても同様である。具体的には、図23から図27と、図35から図39で説明した離間制御部材196Rおよび離間制御部材196Lの移動は、図示しない連結機構によって一体的に移動する。これによって、駆動側に位置するスペーサ151Rが離間保持位置に位置するタイミングと非駆動側に位置するスペーサ151Lが離間保持位置に位置するタイミングは略同時である。また、スペーサ151Rが離間解除位置に位置するタイミングとスペーサ151Lが離間解除位置に位置するタイミングはそれぞれ略同時である。なおこれらのタイミングは、駆動側と非駆動側とでずれていてもよいが、ユーザーが印刷ジョブを開始してから印刷物が排出されるまでの時間を短くするためには、少なくとも離間解除位置に位置するタイミングは同時であることが望ましい。なお本実施例ではスペーサ151Rとスペーサ151Lの揺動軸Hは同軸であるとしたが、上述のように離間解除位置に位置するタイミングが略同時となれば良く、これに限るものでは無い。同様に移動部材152Rの移動部材揺動軸HCと、移動部材152Lの移動部材揺動軸HEは一致しない軸であるが、上述のように離間解除位置に位置するタイミングが略同時となれば良く、これに限るものでは無い。
上述した当接動作及び離間動作を行うために、W41方向又はW42方向に関する、移動部材152Rの突出部152Rhの幅、又は第一力受け面152Rmと第一力受け面152Rpの間の距離は、10mm以下であることが望ましく、より望ましくは6mm以下である。このような寸法関係にすることで適切な当接動作及び離間動作を行うことが可能となる。非駆動側の移動部材152Lについても同様である。
以上のように、本実施例では、駆動側と非駆動側とに同様の離間当接機構150R、150Lを有し、それらが略同時に動作する。これによって、プロセスカートリッジ100が長手方向においてねじれたり変形したりした場合でも、感光ドラム104と現像ローラ9との離間量を長手方向の両端部で制御することができる。従って、長手方向において離間量のばらつきを抑えることができる。
また、本実施例によれば、離間制御部材196R(196L)をホーム位置、第一位置、第二位置の間を一方向(矢印W41、W42方向)に移動させることで、現像ローラ106と感光ドラム104の当接状態と離間状態を制御することができる。よって、画像形成を行うときのみ現像ローラ106を感光ドラム104に当接させ、画像形成を行わないときは現像ローラ4を感光ドラム104から離間させた状態を維持できる。従って、画像形成を行わない状態で長期間放置されても、現像ローラ106と感光ドラム104が変形することがなく、安定した画像形成を行うことができる。
また、本実施例によれば、スペーサ151R(151L)に作用して回転移動をさせる移動部材152R(152L)は、引張りばね153等の付勢力によって収納位置に位置することができる。そのため、画像形成装置本体170の外にプロセスカートリッジ100が存在する際に、プロセスカートリッジ100の最外形から突出することなく、プロセスカートリッジ100単体として小型化を実現することができる。
また、同じく移動部材152R(152L)は、引張りばね153等の付勢力によって収納位置に位置することができる。このため、プロセスカートリッジ100を画像形成装置本体170に装着する際、プロセスカートリッジ100を一方向のみの移動で装着完了することができる。そのため、プロセスカートリッジ100(トレイ171)を上下方向に移動しなくてよい。従って、画像形成装置本体170に余分なスペースが必要なく本体の小型化を実現することができる。
また、本実施例によれば、離間制御部材196R(196L)がホーム位置に位置する際、離間制御部材196R(196L)にはプロセスカートリッジ100から負荷がかからない。そのため、離間制御部材196R(196L)や離間制御部材196R(196L)を動作させる機構に必要な剛性を小さくすることができ、小型化することができる。また、離間制御部材196R(196L)を動作させる機構の摺動部への負荷も小さくなるため、摺動部の摩耗や異音の発生を抑制することできる。
さらに、本実施例によれば、現像ユニット109はプロセスカートリッジ100が有するスペーサ151R(151L)のみで離間位置を維持できる。そのため、現像ローラ106と感光ドラム104の離間量にばらつきをもたらす部品点数を少なくすることで部品公差を小さくでき、離間量を最小限にすることができる。離間量が少なくできるため、画像形成装置本体170内にプロセスカートリッジ100を配置した際に、現像ユニット109が当接位置および離間位置に移動する際の現像ユニット109の存在領域が小さくなることで画像形成装置の小型化が実現できる。加えて当接位置および離間位置に移動する現像ユニット109の現像剤収容部29のスペースを大きくすることができるため、小型化かつ大容量のプロセスカートリッジ100を画像形成装置本体170に配置することができる。
更に本実施例によれば、移動部材152R(152L)は、プロセスカートリッジ100の装着時に収納位置に位置し、かつ、現像ユニット109はプロセスカートリッジ100が有するスペーサ151R(151L)によって離間位置を維持できる。そのため、プロセスカートリッジ100を画像形成装置本体170に装着する際、プロセスカートリッジ100を一方向のみの移動で装着完了することができる。そのため、プロセスカートリッジ100(トレイ171)を上下方向に移動しなくてよい。従って、画像形成装置本体170に余分なスペースが必要なく本体の小型化を実現することができる。また、離間量が少なくできるため、画像形成装置本体170内にプロセスカートリッジ100を配置した際に、現像ユニット109が当接位置および離間位置に移動する際の現像ユニット109の存在領域が小さくなることで画像形成装置の小型化が実現できる。加えて当接位置および離間位置に移動する現像ユニット109の現像剤収容部29のスペースを大きくすることができるため、小型化かつ大容量のプロセスカートリッジ100を画像形成装置本体170に配置することができる。
なお、本実施例では、画像形成装置本体170から受ける現像カップリング部132aの駆動トルクと現像加圧ばね134の付勢力によって現像ユニット109を矢印V2方向(離間位置から現像位置へ移動する方向)に付勢する構成であった。しかしながら、現像ユニット109をV2方向に付勢するための構成としては、現像ユニット109にかかる重力を利用することも可能である。即ち、現像ユニット109にかかる重力が現像ユニット109をV2方向に回転するようなモーメントを発生するように構成すれば良い。このような自重によるV2方向の付勢構成を採用する場合、現像加圧ばね134による付勢構成を設けないようにしてもよいし、現像加圧ばね134による付勢構成と併用してもよい。
[離間当接機構150R、Lの配置詳細]
[離間当接機構150R、Lの配置詳細]
続いて、本実施例における離間当接機構150R、150Lの配置についての図40、図41を用いて詳細に説明する。図40は、プロセスカートリッジ100を現像ユニット109の揺動軸K(感光ドラム軸線方向)に沿って駆動側から見たスペーサ151R周辺の拡大図である。加えて、説明のため現像カバー部材128の一部と駆動側カートリッジカバー部材116の一部を部分断面線CSにて部分的に省略した断面図である。図41は、プロセスカートリッジ100を現像ユニット109の揺動軸K(感光ドラム軸線方向)に沿って非駆動側から見たスペーサ151R周辺の拡大図である。加えて、説明のため現像カバー部材128の一部と駆動側カートリッジカバー部材116の一部を部分断面線CSにて部分的に省略した断面図である。尚、以降に説明するスペーサおよび移動部材の配置に関しては、後に詳細を説明する部分を除いて、駆動側と非駆動側の区別は無くどちらも共通しているため説明は駆動側(図40)のみとし、非駆動側(図41)の説明は省略するが、非駆動側も同様の構成となっている。
図40に示すように、感光ドラム104の回転軸線M1(図40の点M1)と現像ローラ106の回転軸線M2(図40の点M2)を通る直線を線Nとする。また、スペーサ151Rの当接面151Rcと駆動側カートリッジカバー部材116の被当接面116cとの接触領域をM3とし、スペーサ151Rの被押圧面151Reと移動部材152Rのスペーサ押圧面152Rrとの接触領域をM4とする。さらに、現像ユニット109の揺動軸Kと点M2との距離を距離e1とし、揺動軸Kと領域M3との距離を距離e2とし、揺動軸Kと点M4との距離を距離e3とする。
本実施例構成では、現像ユニット109が離間位置、かつ、移動部材152R(152L)が突出位置にある時、現像ユニット109を揺動軸K(又は回転軸線M1又は回転軸線M2)に沿って見ると、以下の位置関係にある。つまり、図40に示すように揺動軸Kに沿って見ると、接触領域M3の少なくとも一部は、線Nを境に領域を分けた時、現像カップリング部132a中心(揺動軸K)が配置された領域AU1と反対側の領域AD1に配置されている。つまり、スペーサ151Rの当接面151Rcは、距離e2が距離e1よりも長くなるように配置されている。また、図40に示すように、揺動軸Kに沿って見たとき、突出部152Rhの少なくとも一部は、線Nを境に領域を分けた時、現像カップリング部132aの中心(揺動軸K)が配置された領域AU1と反対側の領域AD1に配置されている。図40(図41)では、図中上下方向を鉛直方向とすると、プロセスカートリッジ100の姿勢は、画像形成装置本体170に装着された状態の姿勢と同じである。この姿勢は、感光ドラム104の回転軸線M1が水平で且つ感光ドラム104がプロセスカートリッジ100の中で下部に配置される状態での姿勢とも言える。このような姿勢において、領域AD1とはプロセスカートリッジ100の下部に相当し、プロセスカートリッジ100の底部を含む領域でもある。
このようにスペーサ151Rと当接面151Rcを配置することで、当接面151Rcの位置が部品公差等によってばらついたときに、現像ユニット109の離間位置の姿勢のばらつきを小さく抑えることができる。つまり、現像ローラ106と感光ドラム104の離間量(隙間)P1(図1(a)参照)に対して、当接面151Rcのばらつきの影響を極力小さくすることができ、精度よく現像ローラ106と感光ドラム104を離間することができる。また、現像ユニット109の離間時に退避するスペースを余分に持つ必要がなく、画像形成装置本体170の小型化に繋がる。
また、移動部材152R(152L)の力受け部である第一力受け部152Rk(152Lk)と第二力受け部152Rn(152Ln)は線Nを挟んで現像カップリング部132aの回転中心(回転軸線)Kと反対側に配置されている。つまり、各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部は、現像カップリング132aの回転中心(回転軸線)Kが配置された領域AU1と反対側の領域AD1に配置されている。
これまで説明したように、突出部(力受け部)152Rh(152Lh)は長手方向端部に配置されている。また、長手方向端部には、図15(図16)に示すように、現像ユニット109の支持部である円筒部128b(127a)が配置されている。従って、第一力受け部152Rk(152Lk)、第二力受け部152Rn(152Ln)を含む力受け部152Rh(152Lh)を現像ユニット109の円筒部128b(127a)(つまり、揺動軸K)と線Nと反対側の位置に配置することにより、効率的に機能部を配置することができる。つまり、プロセスカートリッジ100、画像形成装置Mの小型化に繋がる。より詳細には、回転軸線M2に沿った方向から見て、直線Nで境界を分けた時に、揺動軸Kが配置された領域AU1には、円筒部128b(127a)等の現像ユニット109をドラムユニット108に対して移動可能に支持するための構造物が配置されている。このため、この揺動軸Kが配置された領域AU1よりも現像カップリング部132aが配置されていない領域AD1に各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部を配置する方が、部材同士の干渉を避けた効率的なレイアウトとすることができる。これによってプロセスカートリッジ100、画像形成装置Mの小型化に繋がる。
加えて、力受け部152Rh(152Lh)は長手方向駆動側端部に配置されている。また、長手方向駆動側端部には、図15に示すように、画像形成装置本体170から駆動を受け、現像ローラ106を駆動する現像駆動入力ギア132(又は現像カップリング部132a)が設けられている。図40に示すように移動部材の第一力受け部152Rk、第二力受け部152Rnは線Nの延長線を挟んで、破線で示す現像駆動入力ギア132(現像カップリング部132a)の回転中心Kと反対側に配置されている。この配置により、効率的に機能部を配置することができる。つまり、プロセスカートリッジ100、画像形成装置Mの小型化に繋がる。より詳細には、回転軸線M2に沿う方向から見て、直線Nで境界を分けた時に、現像カップリング部132aが配置された領域AU1には、このような現像駆動入力ギア132等の現像ローラ106等の現像ユニット109が備える部材を駆動するための駆動部材が配置されている。このため、この現像カップリング部132aが配置された領域AU1よりも現像カップリング部132aが配置されていない領域AD1に力受け部152Rhの少なくとも一部を配置する方が、部材同士の干渉を避けた効率的なレイアウトとすることができる。これによってプロセスカートリッジ100、画像形成装置Mの小型化に繋がる。
なお、上記説明において領域AU1、領域AD1は、回転軸線M2に沿う方向から見て、直線Nで境界を分けた時に、揺動軸K又は現像カップリング部132aが配置された領域、配置されていない領域として定義した。しかし、別の定義をすることも可能である。領域AU1、領域AD1は、回転軸線M2に沿う方向から見て、直線Nで境界を分けた時に、帯電ローラ105又はその回転軸線(回転中心)M5が、配置された領域と配置されていない領域として定義しても良い。
また、図236は離間状態のプロセスカートリッジ100を回転軸線M2に沿う方向で見た概略断面図である。図3や図236を参酌すると、更に別の定義として、領域AU1、領域AD1は、回転軸線M2に沿う方向から見て、直線Nで境界を分けた時に、現像ブレード130や近接点130d、攪拌部材129a、攪拌部材129aの回転軸線M7、又は、被押込み面152Rfが、配置された領域と配置されていない領域として定義しても良い。近接点130dは現像ブレード130の現像ローラ106の表面に最も近接した位置とする。
一般的な電子写真用カートリッジ、特にインラインレイアウトの画像形成装置に用いられるカートリッジにおいては、領域AD1にはカートリッジの他の部材が比較的配置されにくい。また、領域AD1に各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部を配置すると装置本体170においても次に示すようなメリットがある。つまり、装置本体170の離間制御部材196R(196L)を、カートリッジの下側に配置し、略水平方向(本実施例ではW41、W42方向であり、感光ドラム104又はカートリッジ100の配列方向)に移動させて力受け部152Rh(152Lh)を押圧する。このような構成により、離間制御部材196R(196L)及びその駆動機構を比較的簡易な構成又は小型な構成にすることができる。これは特にインラインレイアウトの画像形成装置では顕著である。このように、領域AD1に各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部を配置することが、装置本体170の小型化やコストダウン等へ寄与することも期待できる。
さらに、スペーサ151Rと移動部材152Rとの接触部は、距離e3が距離e1よりも長くなるように配置されている。これにより、より軽い力でスペーサ151Rと駆動側カートリッジカバー部材116を接触させることができる。つまり、現像ローラ106と感光ドラム104の離間を安定的に行うことが可能となる。
以上の離間当接機構150R、Lの配置については、離間状態のプロセスカートリッジ100を示す図40、図41を用いて説明したが、当接状態のプロセスカートリッジ100においても同様の関係となっていることは他の図からも明らかである。図235は当接状態のプロセスカートリッジ100を回転軸線M2に沿う方向で見た側面図(一部断面図)である。各力受け部152Rk(152Lk)、152Rn(152Ln)の配置は上述のものと同様である。
また、直線Nに直交するVD1方向とする。駆動側において、移動部材152R及び各力受け部152Rk、152Rnは、ドラム枠体及び現像枠体に対してZA方向及びその逆方向に移動することで、待機位置と稼働位置との間を移動する構成である。そして、このZA方向及びその逆方向の移動によって、移動部材152R及び各力受け部152Rk、152Rnが少なくともVD1方向に関して変位する。つまり、移動部材152R及び各力受け部152Rk、152Rnは、少なくともVD1方向に変位して待機位置と稼働位置との間を移動する。この構成によれば、移動部材152Rが稼働位置にある時は、各力受け部152Rk、152Rnで離間制御部材196Rから力を受けることによって現像ユニット109を現像位置と退避位置との間で移動させることができる。そして、移動部材152Rが待機位置にある時は、移動部材152R及び各力受け部152Rk、152Rnが離間制御部材196Rと干渉してプロセスカートリッジ100を装置本体170に対して挿入又は取り外しできなくなることを回避可能となる。非駆動側の構成についても同様である。
また、移動部材152Rが稼働位置にある時、各力受け部152Rk、152Rnが設けられた突出部152Rhは、現像ユニット109から少なくともVD1方向に突出した位置に配置される。このため、離間制御部材196Rの第一力付与面196Raと第二力付与面196Rbの間の空間196Rdの中に突出部152Rhを配置させることが可能である。非駆動側の構成についても同様である。
[離間当接機構150R、Lの配置詳細−その2]
[離間当接機構150R、Lの配置詳細−その2]
上述したような、各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部を領域AD1へ配置するという概念に類似の概念について、図236、図237を用いて説明する。
図236、図237は、プロセスカートリッジ100を現像ユニット109の回転軸線M1、回転軸線K又は回転軸線M2に沿って駆動側から見た概略断面図であり、図236は離間状態、図237は当接状態を示す。尚、以降に説明するスペーサ151および移動部材152の配置に関しては、駆動側と非駆動側の区別は無くどちらも共通しており、また当接状態と離間状態でもほぼ同じであるので、説明は図236を用いて駆動側の離間状態についてのみ説明し、非駆動側での説明及び当接状態における説明は省略する。
トナー搬送ローラ(現像剤供給部材)107の回転軸線を回転軸線(回転中心)M6とする。また、プロセスカートリッジ100は、現像ユニット109に収容する現像剤を回転して攪拌する攪拌部材108を有し、その回転軸線を回転軸線(回転中心)M7とする。
図236において、回転軸線M1と回転軸線M5を結ぶ直線N10と感光ドラム104の表面との交点のうち回転軸線M5から遠い方の交点を交点MX1とする。交点MX1を通る感光ドラム104の表面への接線を接線(所定接線)N11とする。接線N11を境に領域を分けて、回転軸線M1、帯電ローラ105、回転軸線M5、現像ローラ106、回転軸線M2、現像カップリング部132a、回転軸線K、現像ブレード130、近接点130d、トナー搬送ローラ107、回転軸線M6、攪拌部材129a、回転軸線M7、又は、被押込み面152Rfが、配置された領域を領域AU2、配置されていない領域を領域(所定領域)AD2とする。また、領域AU2、AD2は次のような別の言い方で定義しても良い。即ち、回転軸線M5から回転軸線M1に向かう方向と平行で且つ同じ向きを向く方向をVD10方向とすると、VD10方向に関して感光ドラム104の最下流部が交点MX1である。そして、方向VD10に関して、最下流部MX1よりも上流側の領域を領域AU2、下流側の領域を領域(所定領域)AD2とする。いずれの表現であっても定義される領域AU2、AD2は同じである。
そして、各力受け部152Rk、152Rnの少なくとも一部は領域AD2に配置されている。このように、領域AD2に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置することは、プロセスカートリッジ100や装置本体170の小型化やコストダウン等へ寄与することも期待できる。これは、領域AD1に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置する場合と同様の理由からである。非駆動側の構成についても同様である。
また、移動部材152R及び各力受け部152Rk、152Rnは、ZA方向及びその逆方向の移動によって、少なくともVD10方向に関して変位する。つまり、移動部材152R及び各力受け部152Rk、152Rnは、少なくともVD10方向に変位して待機位置と稼働位置との間を移動する。この構成によれば、移動部材152Rが稼働位置にある時は、各力受け部152Rk、152Rnで離間制御部材196Rから力を受けることによって現像ユニット109を現像位置と退避位置との間で移動させることができる。そして、移動部材152Rが待機位置にある時は、移動部材152R及び各力受け部152Rk、152Rnが離間制御部材196Rと干渉してプロセスカートリッジ100を装置本体170に対して挿入又は取り外しできなくなることを回避可能となる。非駆動側の構成についても同様である。
また、移動部材152Rが稼働位置にある時、各力受け部152Rk、152Rnが設けられた突出部152Rhは、現像ユニット109から少なくともVD10方向に突出した位置に配置される。このため、離間制御部材196Rの第一力付与面196Raと第二力付与面196Rbの間の空間196Rdの中に突出部152Rhを配置させることが可能である。非駆動側の構成についても同様である。
[離間当接機構150R、Lの配置詳細−その3]
[離間当接機構150R、Lの配置詳細−その3]
上述したような、各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部を領域AD1へ配置するという概念に類似の概念について、図238を用いて説明する。
図238は、離間状態のプロセスカートリッジ100を現像ユニット109の回転軸線M1、回転軸線K又は回転軸線M2に沿って駆動側から見た概略断面図である。尚、以降に説明するスペーサ151および移動部材152の配置に関しては、駆動側と非駆動側の区別は無くどちらも共通しており、また当接状態と離間状態でも実質的に共通であるので、説明は図238を用いて駆動側の離間状態についてのみ説明し、非駆動側での説明及び当接状態における説明は省略する。
図238において、回転軸線Kと回転軸線M2を結ぶ直線N12と現像ローラ106の表面との交点のうち回転軸線Kから遠い方の交点を交点MX2とする。交点MX2を通る現像ローラ106の表面への接線を接線(所定接線)N13とする。接線N13を境に領域を分けて、現像カップリング部132a、回転軸線K、回転軸線M2、帯電ローラ105、回転軸線M5、現像ブレード130、近接点130d、トナー搬送ローラ107、回転軸線M6、攪拌部材129a、回転軸線M7、又は、被押込み面152Rfが、配置された領域を領域AU3、配置されていない領域を領域(所定領域)AD3とする。また、領域AU3、AD3は次のような別の言い方で定義しても良い。即ち、回転軸線Kから回転軸線M2に向かう方向と平行で且つ同じ向きを向く方向をVD12方向とすると、VD12方向に現像ローラ106の最下流部が交点MX2である。そして、VD12方向に関して、最下流部MX2よりも上流側の領域を領域AU3、下流側の領域を領域(所定領域)AD3とする。いずれの表現であっても定義される領域AU3、AD3は同じである。
そして、各力受け部152Rk、152Rnの少なくとも一部は領域AD3に配置されている。このように、領域AD3に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置することは、プロセスカートリッジ100や装置本体170の小型化やコストダウン等へ寄与することも期待できる。これは、領域AD1に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置する場合と同様の理由からである。非駆動側の構成についても同様である。
また、移動部材152R及び各力受け部152Rk、152Rnは、ZA方向及びその逆方向の移動によって、少なくともVD12方向に関して変位する。つまり、移動部材152R及び各力受け部152Rk、152Rnは、少なくともVD12方向に変位して待機位置と稼働位置との間を移動する。この構成によれば、移動部材152Rが稼働位置にある時は、各力受け部152Rk、152Rnで離間制御部材196Rから力を受けることによって現像ユニット109を現像位置と退避位置との間で移動させることができる。そして、移動部材152Rが待機位置にある時は、移動部材152R及び各力受け部152Rk、152Rnが離間制御部材196Rと干渉してプロセスカートリッジ100を装置本体170に対して挿入又は取り外しできなくなることを回避可能となる。非駆動側の構成についても同様である。
また、移動部材152Rが稼働位置にある時、各力受け部152Rk、152Rnが設けられた突出部152Rhは、現像ユニット109から少なくともVD12方向に突出した位置に配置される。このため、離間制御部材196Rの第一力付与面196Raと第二力付与面196Rbの間の空間196Rdの中に突出部152Rhを配置させることが可能である。非駆動側の構成についても同様である。
[離間当接機構150R、Lの配置詳細−その4]
[離間当接機構150R、Lの配置詳細−その4]
上述したような、各力受け部152Rk(152Lk)、152Rn(152Ln)のそれぞれの少なくとも一部を領域AD1へ配置するという概念に類似の概念について、図239を用いて説明する。
図239は、離間状態のプロセスカートリッジ100を現像ユニット109の回転軸線M1、回転軸線K又は回転軸線M2に沿って駆動側から見た概略断面図である。尚、以降に説明するスペーサ151および移動部材152の配置に関しては、駆動側と非駆動側の区別は無くどちらも共通しており、また当接状態と離間状態でも実質的に共通であるので、説明は図239を用いて駆動側の離間状態についてのみ説明し、非駆動側での説明及び当接状態における説明は省略する。
図239において、回転軸線M2と回転軸線M6を結ぶ直線N14と現像ローラ106の表面との交点のうち回転軸線Kから遠い方の交点を交点MX2とする。交点MX2を通る現像ローラ106の表面への接線を接線(所定接線)N14とする。接線N14を境に領域を分けた時、現像カップリング部132a、回転軸線K、帯電ローラ105、回転軸線M5、現像ブレード130、近接点130d、攪拌部材129a、回転軸線M7、又は、被押込み面152Rfが、配置された領域を領域AU4、配置されていない領域を領域(所定領域)AD4とする。
そして、各力受け部152Rk、152Rnの少なくとも一部は領域AD4に配置されている。このように、領域AD4に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置することは、プロセスカートリッジ100や装置本体170の小型化やコストダウン等へ寄与することも期待できる。これは、領域AD1に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置する場合と同様の理由からである。非駆動側の構成についても同様である。
また、移動部材152R及び各力受け部152Rk、152Rnは、ZA方向及びその逆方向の移動によって、少なくとも直線N14と直交するVD14方向に関して変位する。つまり、移動部材152R及び各力受け部152Rk、152Rnは、少なくともVD14方向に変位して待機位置と稼働位置との間を移動する。この構成によれば、移動部材152Rが稼働位置にある時は、各力受け部152Rk、152Rnで離間制御部材196Rから力を受けることによって現像ユニット109を現像位置と退避位置との間で移動させることができる。そして、移動部材152Rが待機位置にある時は、移動部材152R及び各力受け部152Rk、152Rnが離間制御部材196Rと干渉してプロセスカートリッジ100を装置本体170に対して挿入又は取り外しできなくなることを回避可能となる。非駆動側の構成についても同様である。
また、移動部材152Rが稼働位置にある時、各力受け部152Rk、152Rnが設けられた突出部152Rhは、現像ユニット109から少なくともVD14方向に突出した位置に配置される。このため、離間制御部材196Rの第一力付与面196Raと第二力付与面196Rbの間の空間196Rdの中に突出部152Rhを配置させることが可能である。非駆動側の構成についても同様である。
以上で説明した各力受け部の配置関係は、以降で説明する全ての実施例においても同様の関係となっている。
[保持機構]
[保持機構]
上述した実施例においては、ドラムユニット108が現像ユニット109を退避位置と現像位置とでそれぞれ安定的に保持するための構成が、第1位置と第2位置をとることが可能なスペーサ151Rを保持部材やその一部分である離間保持部151Rbを保持部であるとして説明した。しかしながら、本実施例の構成を次のように見ることも可能である。即ち、ドラムユニット108が現像ユニット109を退避位置と現像位置とでそれぞれ安定的に保持する保持機構として、少なくとも、スペーサ151R、現像カバー部材128の第一支持部128c、駆動側カートリッジカバー部材116の被当接面116c、現像加圧ばね134を挙げることも可能である。この場合、スペーサ151Rが第1位置をとり現像ユニット109が退避位置にある時は保持機構が第1状態にあり、スペーサ151Rが第2位置をとり現像ユニット109が現像位置にある時は保持機構が第2状態にあると言える。
次に、図42~図46を用いて、実施例2について説明する。本実施例では、前述した実施例と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。実施例1では、駆動側と非駆動側にそれぞれ離間当接機構として離間当接機構150R、離間当接機構150Lが設けられていた。これに対し実施例では、プロセスカートリッジの片側のみに離間当接機構設けた構成を説明する。
図42~図46は、現像ユニット109が離間位置、かつ、離間当接機構の移動部材が突出位置にある時の状態を示した図である。図42(a)は実施例1のプロセスカートリッジ100を駆動側下方からみた斜視図である。図42(b)は実施例1のプロセスカートリッジ100の感光ドラム104に対する現像ローラ106の離間量を示す模式図である。
図42に示すように、実施例1の離間量P1は駆動側と非駆動側とで同じ量となるよう設定されている。離間量P1はスペーサ151の揺動軸Hから当接面151Rcまでの距離n1を変更することにより変更できる。以下に示す本実施例でも同様な構成で離間量を変更する。
本実施例の図43に示す形態は、プロセスカートリッジ200−1の離間当接機構250−1が駆動側のみに配置され、非駆動側に離間当接機構は存在しない。図43(a)はプロセスカートリッジ200−1を駆動側下方からみた斜視図である。図43(b)はプロセスカートリッジ200−1の感光ドラム104に対する現像ローラ106の離間量を示す模式図である。
図43に示すように、駆動側のみに離間当接機構250−1が配置されているため、現像加圧バネ(図43では不図示、図34の134参照)の影響により、駆動側の離間量P2−1Rに対して非駆動側の離間量P2−1Lは小さくなる。ここでは、非駆動側の離間量P2−1Lが0とならないよう、つまり、現像ローラ106と感光ドラム104が非駆動側で接触しないよう駆動側の離間量P2−1Rを実施例1の離間量P1(図42(b)参照)より大きく設定している。
これにより、実施例1と同等の効果を得られる。また、非駆動側の離間当接機構が無い分、プロセスカートリッジや画像形成装置本体の小型化やコストダウンが図れる。
図44は本実施例の別の形態1を示す。この形態はプロセスカートリッジ200−2の離間当接機構250−2を駆動側のみに配置され、非駆動側に離間当接機構は存在しない。本形態では、現像ユニット109が離間位置にある時に、現像ローラ106の非駆動側の端部と感光ドラム104が接触した状態となる。図44(a)はプロセスカートリッジ200−2を駆動側下方からみた斜視図である。図44(b)はプロセスカートリッジ200−2の感光ドラム104に対する現像ローラ106の離間量を示す模式図である。
図43の形態とは異なり図44の形態では、駆動側の離間量P2−2Rは、実施例1の離間量P1に対して、同等かそれよりも小さい離間量で設定されている。この場合、現像加圧バネ(図43では不図示、図34の134参照)の付勢力により、非駆動側では現像ローラ106と感光ドラム104が接触する。しかし、非駆動側の接触範囲m2を画像形成領域m4に入らない範囲で設定すれば画像に影響しない。ただし、画像への影響が無視できる程度に小さいような場合は、もしくは、画像への影響があってもそれを無視できるような用途を想定している場合は、必ずしも接触範囲m2を画像形成領域m4に入らない範囲で設定する必要はない。即ち、このような場合においては、接触範囲m2を画像形成領域m4に入る範囲に設定しても良い。
以上説明したように、本形態では、図43に示す形態に対して離間量を小さくすることにより、実施例1で述べたような画像形成装置の小型化につなげることができる。また、非駆動側の離間当接機構が無い分、プロセスカートリッジや画像形成装置本体の小型化やコストダウンも図れる。
図45は本実施例の別の形態2を示す。この形態は、プロセスカートリッジ200−3の離間当接機構250−1は非駆動側のみに配置され、駆動側に離間当接機構は存在しない。図45(a)はプロセスカートリッジ200−3を非駆動側下方からみた斜視図である。図45(b)はプロセスカートリッジ200−3の感光ドラム104に対する現像ローラ106の離間量を示す模式図である。
図45に示すように、非駆動側のみに離間当接機構250−3が配置されているため、駆動入力ギア(図45では不図示、図1の132a参照)の影響により、非駆動側の離間量P2−3Lに対して、駆動側の離間量P2−3Rは小さくなる。ここでは、駆動側の離間量P2−3Rが0とならないよう、つまり、現像ローラ106と感光ドラム104が駆動側で接触しないよう非駆動側の離間量P2−3Lを実施例1の離間量P1より大きく設定している。
これにより、実施例1と同等の効果を得られる。また、駆動側の離間当接機構が無い分、プロセスカートリッジや画像形成装置本体の小型化やコストダウンが図れる。
図46は本実施例の別の形態を3示す。この形態は、プロセスカートリッジ200−4の離間当接機構250−4を非駆動側のみに配置され駆動側に離間当接機構は存在しない。また現像ユニット109が離間位置にある時に、現像ローラ106の駆動側の端部と感光ドラム104となる。図46(a)はプロセスカートリッジ200−4を駆動側下方からみた斜視図である。図46(b)はプロセスカートリッジ200−4の感光ドラム104に対する現像ローラ106の離間量を示す模式図である。
図45の形態とは異なり図46の形態では、非駆動側の離間量P2−4Lを実施例1の離間量P1に対して、同等かそれよりも小さい離間量に設定している。この場合、駆動入力ギア(図46では不図示、図1の132a参照)の影響により、駆動側では現像ローラ106と感光ドラム104が接触する。しかし、駆動側の接触範囲m5を画像形成領域m4に入らない範囲で設定すれば画像に影響しない。なお、駆動側、非駆動側の離間量は画像に影響しない範囲で任意に設定可能である。
以上説明したように、図45の形態に対して離間量を小さくすることにより、実施例1で述べたような画像形成装置の小型化につなげることができ、かつ、プロセスカートリッジのコストダウンも図れる。
以上、本実施例では4つの形態を説明したが、これらの形態において、駆動側、非駆動側の離間量は画像に影響無い範囲で任意に設定可能である。
次に、図47~図55を用いて本発明の実施例3について説明する。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例は主に移動部材の構成及び動作が実施例1と異なる。なおスペーサ351Lはスペーサ151Lと同様の構成となっている。
[移動部材の構成]
[移動部材の構成]
まず初めに、非駆動側を例に移動部材の構成について説明する。図47は非駆動側の移動部材352Lの分解組付けを説明する図である。本実施例3では、実施例1における移動部材152Lに相当する移動部材を2分割し、連結した構成としている。具体的には、図47で示すように移動部材352Lを上部移動部材352L1と下部移動部材352L2の2分割構成としている。下部移動部材352L2には軸352L2aが設けられている。また図48(a)に示すように下部移動部材352L2は現像ユニットからZA方向に突出可能な突出部352Lhを備え、突出部352Lhには第一力受け部(退避力受け部、離間力受け部)352Lkと第二力受け部(当接力受け部)352Lnが設けられている。上部移動部材352L1には下部移動部材352L2との対向面に開放部352L1dを有している。また、上部移動部材352L1は非駆動側軸受327を押圧する離間時押圧部352L1qを有する。
また、上部移動部材352L1には開放部352L1dを挟んで、一対の長丸穴352L1hが設けられている。下部移動部材352L2には、ばね保持部352L2bが設けられている。ばね保持部352L2bに圧縮ばね352Lspの一端を嵌合させ、他端を開放部352L1dより挿入し、その奥の保持部(不図示)に支持し、その後各々の長丸穴352L1hに各々の軸352L2aが嵌合するように組付ける。その際に先端部352L1aを広げながら組付ける為352Lはプラスチック材料が良い。尚、352Lを硬い材質にする場合には軸352L2aと352L2を別体で構成しても良い。例えば軸352L2aを最後に352L2に圧入して組付けても良い。
こうする事で、上部移動部材352L1と下部移動部材352L2は長丸穴352L1hと一対の軸352L2aによって連結され、かつ圧縮ばね352Lspによって上部移動部材352L1は下部移動部材352L2から離れる方向に付勢される構成となっている。さらに上部移動部材352L1に対して下部移動部材352L2は軸352L2aを中心に回転自在に構成されている。また、上部移動部材352L1に対して長丸穴352L1h2に沿う方向に相対的に移動可能に構成されている。
[移動部材の動作説明]
[移動部材の動作説明]
次に、移動部材352Lの動作について図48(a)~(d)を用いて説明する。第1実施例で説明したように、プロセスカートリッジ300を画像形成装置本体170に挿入完了した後、前ドア11を閉じる動作と連動し、カートリッジ押圧ユニット190により移動部材352Lが押圧される。その時の移動部材352Lの動作について説明する。
図48(a)、(b)は移動部材352Lがカートリッジ押圧機構190によって押されていない状態(フリーの状態)を示し、図48(c)、(d)は移動部材352Lがカートリッジ押圧機構190によって押されている状態(ロック状態)を示している。
まず、図48(a)、(b)を用いて、移動部材352Lがカートリッジ押圧機構190によって押されていない状態(フリーの状態)を説明する。図48(b)で示すように、下部移動部材352L2は非駆動側軸受327に設けられた、揺動軸HEを中心とする円弧状ガイドリブ327g1、327g2の間に溝が形成され、溝に軸352L2aが嵌合する。
上部移動部材352L1は軸受327の軸HEに長丸穴352L1h2が嵌合することにより、長丸穴の長手方向及びZA方向に移動可能かつ、軸HEを中心に揺動可能である。下部移動部材352L2は先に説明したように上部移動部材352L1に対して軸部352L2a中心に揺動可能である。カートリッジ押圧機構190が上部移動部材352L1を押すことにより、下部移動部材352L2に対して上部移動部材352L1が近づく事が出来る。
以上の構成により、移動部材352Lがカートリッジ押圧機構190によって押されていない状態(フリーの状態)においては図48(a)で示すように、下部移動部材352L2は軸部352L2aを回転中心とした回転半径Rxで矢印θu、θu‘方向に揺動可能である。従って、下部移動部材352L2の第一力受け部(退避力受け部、離間力受け部)352Lkと第二力受け部(当接力受け部)352Lnが力を受けて矢印θu、θu‘方向に揺動しても上部移動部材352L1の非駆動側軸受327を押圧する離間時押圧部352L1qへ力は伝達されない。
次に図48(c)、(d)を用いて、移動部材352Lがカートリッジ押圧機構190によって押されている状態(ロック状態)の動作について説明する。上部移動部材352L1はカートリッジ押圧機構190で押し下げることにより、上部移動部材352L1は、ばね352Lspの付勢力に抗して下部移動部材352L2に向かって移動し、図48(c)、(d)及び図57で示すように係合部(角軸部)352L1aが被係合部(角穴部)352L2hに嵌合し、上部移動部材352L1と下部移動部材352L2は一体となる。つまり、上部移動部材352L1に対して下部移動部材352L2は軸部352L2aを中心とした揺動が規制された状態となる。この状態で、一体となった移動部材352Lは図48(c)で示すように、移動部材揺動軸HEを回転中心とし、かつ図48(d)で示す円弧状ガイドリブ327g1、327g2の間に形成された溝を軸352L2aが移動しながら図48(c)で示される回転半径Ryで矢印θw、θw´方向に揺動可能となる。詳細については後述するが、カートリッジ押圧機構190に押された状態においては、移動部材352Lは実施例1における移動部材152Lと同一の動きをとる事が可能になる。
また、押圧機構190に押されていない状態においては、前述の回転半径Ryよりも小さい回転半径Rx(図48(a)参照)で下部移動部材352L2が揺動することが可能である。
尚、スペーサ(保持部材)351Lは実施例1と同様の構成によって351Lf部に付勢部材153(本実施例では簡単のため不図示)で時計方向に回転するよう付勢してされている。
[プロセスカートリッジの画像形成装置本体への装着]
[プロセスカートリッジの画像形成装置本体への装着]
次に、実施例3におけるプロセスカートリッジ挿入時の移動部材352Lの動作について図49(a)~(d)を用いて説明する。図49(a)はプロセスカートリッジ300を画像形成装置本体170に挿入する途中の状態を表している。図49(b)はプロセスカートリッジ300を画像形成装置本体170から取出す途中の状態を表している。図49(c)はプロセスカートリッジ300を画像形成装置本体170に挿入完了直後の状態を表している。
さて、前述のように上部移動部材352L1が押されていない状態(フリーの状態)においては図49(e)で示すように下部移動部材352L2は軸部352L2aを回転中心として揺動可能である。本実施例において、下部移動部材352L2は実施例1における移動部材152の常時突出位置(図35参照)と同じ位置にある。従って、実施例1と同様に不図示のカートリッジトレイ171に装着されたプロセスカートリッジ300を画像形成装置本体170内に矢印X1方向に挿入する際に、離間制御部材196Lと下部移動部材352L2は干渉する。
しかし、前述の構成により、図49(a)で示すように、下部移動部材352L2は軸部352L2aを回転中心として矢印θu´方向に揺動し、離間制御部材196Lと下部移動部材352L2が干渉して装置本体内170に挿入できなくなることを回避することができる。
尚、この時、下部移動部材352L2は、矢印θu´方向に揺動によってスペーサ351Lを押圧し、離間保持位置から離間解除位置へ移動させ、現像ユニット109は現像位置(当接位置)へ移動する。しかし、その後、画像形成装置本体170の電源投入により離間制御部材196LはW42方向とW41方向の往復動作を行うため、画像形成準備完了時には再度、現像ユニット109は離間位置(退避位置)へ復帰する。
また、図50(a)で示すように、カートリッジトレイ171を装置本体170内への挿入が完了した状態で、下部移動部材352L2は離間制御部材196Lに接触し、図50(b)の状態にまで到達せず、途中の位置で停止する場合もある。この状態を確実に回避させる方法について図50及び図51を用いて説明する。
まず、図51(a)で示すように、上部移動部材352L1に回転アシスト部となる凸部352L1pを設ける。また、下部移動部材352L2には斜面352L2sを設ける。この凸部352L1pは上部移動部材352L1が降下する際に、斜面352L2sに接触し、下部移動部材352L2を矢印θu方向に回転させる。こうする事で図50(a)に示すように、下部移動部材352L2が矢印θu方向に回転し、離間制御部材196Lを矢印θu方向に押し下げながら図50(b)の位置まで回転する。
次に画像形成装置本体170内にプロセスカートリッジ300が挿入され前ドア11が閉められると、前述の如く移動部材352Lはカートリッジ押圧機構190(図37等参照)によって図52(a)で示される矢印ZAに方向押し下げられる。そして、図52(b)で示されるように係合部(角軸部)352L1aが被係合部(角穴部)352L2hに嵌合する。つまり上部移動部材352L1と下部移動部材352L2は一体となり、実施例1の移動部材152Lと実質的に同一の役割を担うことになる。
[プロセスカートリッジの画像形成装置本体からの取り外し]
[プロセスカートリッジの画像形成装置本体からの取り外し]
また、これとは逆に、図49(b)に示すように、プロセスカートリッジ300を画像形成装置本体外矢印X2方向に取り出す際にも、離間制御部材196Lと下部移動部材352L2は干渉する。
しかし、前述のように移動部材352L1はフリーの状態であるので、下部移動部材352L2は、第一力受け部(退避力受け部、離間力受け部)352Lkとで力を受けた際は、軸部352L2aを回転中心として矢印θu方向に揺動する。しかし、第一力受け部(退避力受け部、離間力受け部)352Lkが受けた力は上部移動部材352L1の現像ユニット109の非駆動側軸受327を押圧する離間時押圧部352L1qへ力は伝達されない。つまり、移動部材352L1は現像ユニット109を移動させることができない。この状態は押圧力の伝達が解除された伝達解除状態である。このため、離間制御部材196Lと下部移動部材352L2が干渉して装置本体内170から取り外しできなくなることを回避することができる。尚、本実施例では、カラー画像形成装置に使用するプロセスカートリッジについての説明である。したがって4個のプロセスカートリッジ及び4個の離間制御部材が存在する。その為ステーションによっては図49で示される動作が最大4回繰り返されることになる。
尚、下部移動部材352L2は圧縮ばね352Lspの復元力により、例えば図49(c)の位置から図49(d)で示す中立位置(図56で示す上部移動部材352L1と下部移動部材352L2とのなす角度θt=0°となる位置)に戻るように構成されている。
[現像ユニットの当接離間動作]
[現像ユニットの当接離間動作]
図53(a)は現像ローラ106と感光ドラム104の当接の瞬間を示した図、図53(b)は現像ユニット109の離間動作を示した図、図53(c)は移動部材352の詳細を示した図である。移動部材352Lは、ロック状態となっていて、実施例1で示す移動部材152Lと実質的に同一の役割を担うことができる状態となっている。このため移動部材352Lは、離間制御部材196Lから力を受けスペーサ351Lに作用し離間を解除する。尚、スペーサ351Lに当接させる部材は上部移動部材352L1と下部移動部材352L2のどちらでも良い。つまり、当接動作の際にスペーサ351Lを押圧する当接時押圧部は、上部移動部材352L1と下部移動部材352L2の少なくともいずれか一方に設けられていれば良い。また、離間する際には離間制御部材196Lから力を受け、軸部327aに下部移動部材352L2と一体となった上部移動部材352L1の離間時押圧部352L1qが当接することにより現像枠体325全体が揺動する。この状態は、第一力受け部352Lkで受けた力を離間時押圧部352L1qへ伝達し、現像ユニット109を現像位置から退避位置へ向かう方向に移動するよう非駆動側軸受237を移動させることが可能な伝達状態である。そして、実施例1と同様の動作によってスペーサ351Lが移動し離間状態を維持する。
[駆動側離間当接機構の構成]
[駆動側離間当接機構の構成]
図54はプロセスカートリッジ300の現像ユニット部分の駆動側の構成を示した外観図である。本実施例においては、非駆動側の離間当接機構を用いて構成を説明したが、駆動側の構成についても同様の構成であるので、詳細な説明は割愛する。駆動側の移動部材352Rは、実施例1における移動部材152Rに相当する部材であり、非駆動側の移動部材352Lと同様に、上部移動部材352R1と下部移動部材352R2を連結した構成である。
[駆動側、非駆動側の離間当接機構]
[駆動側、非駆動側の離間当接機構]
図55はプロセスカートリッジ300を現像器側から見た斜視図である。本実施例においては、図55(a)で示すように、非駆動側に移動部材352L、駆動側に移動部材352Rを配置している。他の形態として図55(b)で示すように非駆動側のみ移動部材352L設ける構成でも良い。また、図55(c)で示すように駆動側のみ移動部材352Rを設ける構成でも良い。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。
また、本実施例では、第一力受け部(退避力受け部、離間力受け部)352Lkと第二力受け部(当接力受け部)352Lnを備える下部移動部材352L2を、上部移動部材352L1及びプロセスカートリッジ300の他の部分に対して移動可能とした。本実施例においてはその移動によって、第一力受け部352Lkと第二力受け部352Lnは、ZA方向に変位し、これによって方向VD1(図40等)、方向VD10(図236等)、方向VD12(図238)、方向VD14(図239)に少なくとも変位する。そして、移動部材352L2が、移動可能な状態(フリーの状態)と、上部移動部材352L1に対して固定された状態(ロック状態)を上部移動部材352L1の位置によって切り替え可能とした。これにより、プロセスカートリッジ300を装置本体170内への挿入又は抜き出す際に、上記フリーの状態をとることで、下部移動部材352L2と装置本体170、特に離間制御部材196Lとが干渉して挿入又は抜き出しができなくなることを回避することができる。
次に、図58~図66を用いて実施例4について説明する。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。なおスペーサ651Lはスペーサ151Lと同様の構成となっている。
[移動部材の構成]
[移動部材の構成]
まず初めに、非駆動側を例に移動部材の構成について説明する。図58は実施例6で説明する非駆動側の移動部材652Lの分解組付けを説明する図である。本実施例6では、実施例1における移動部材152Lに相当する移動部材が図62に示すようにプロセスカートリッジ600を画像形成装置本体170に挿抜する過程で離間制御部材196Lと長手方向(Y1、Y2方向)で回避する構成となっている。Y1、Y2方向は実施例1の感光ドラム104の回転軸線M1及び現像ローラ106の回転軸線M2に平行な方向である。移動部材が離間制御部材196Lを回避しながらの挿抜に関しては後述する。
具体的な移動部材652Lの構成は、図58で示すように上部移動部材652L1と下部移動部材652L2の2分割構成である。図58(a)は上部移動部材652L1と下部移動部材652L2の組付け前の状態を示す。図58(b)、(c)は上部移動部材652L1と下部移動部材652L2は組付け後の状態を示す。上部移動部材652L1には下部移動部材652L2とプロセスカートリッジを画像形成装置本体に挿抜する方向(X1、X2方向 図62参照)で重なる部分に、X1、X2方向で向かい合うように一対の長丸穴652L1hが設けられている。下部移動部材652L2には軸652L2aが設けられている。また図48(a)に示すように下部移動部材652L2は現像ユニットからZA方向に突出可能な突出部652Lhを備え、突出部652Lhには第一力受け部(退避力受け部、離間力受け部)652Lkと第二力受け部(当接力受け部)652Lnが設けられている。上部移動部材652L1と下部移動部材652L2の間には圧縮ばね652Lspが設けられている。圧縮ばね652Lspは一端を上部移動部材652L1の上保持部652L1dに支持され、他端を下保持部652L2bの着座面652L2cに着座させ、その後長丸穴652L1hに軸652L2aが勘合するように組付ける。
このように組付けを行う移動部材652Lは長丸穴652L1hに軸652L2aが勘合するように組付ける際、上部移動部材652L1の先端部652L1aを広げながら組付ける為、プラスチック材料が良い。尚、移動部材652Lを硬い材質にする場合には軸652L2aと下部移動部材652L2を別体で構成しても良い。例えば軸652L2aを最後に下部移動部材652L2に圧入して組付けても良い。
図59は上部移動部材652L1と下部移動部材652L2の2分割構成の斜視図である。(圧縮ばね652Lspは不図示)
組付けられた移動部材652Lの上部移動部材652L1と下部移動部材652L2は次の2つの状態をとれる。1つは図58(b)図59(a)に示す、下部移動部材652L2の軸652L2aが上保持部652L1dの長丸穴652L1hの中心に対して上保持部652L1dから離れた位置にある状態。もう1つは図58(c)図59(b)に示す、下部移動部材652L2の軸652L2aが上保持部652L1dの長丸穴652L1hの中心に対して上保持部652L1dに近い位置にある状態である。
組付けられた移動部材652Lの上部移動部材652L1と下部移動部材652L2は次の2つの状態をとれる。1つは図58(b)図59(a)に示す、下部移動部材652L2の軸652L2aが上保持部652L1dの長丸穴652L1hの中心に対して上保持部652L1dから離れた位置にある状態。もう1つは図58(c)図59(b)に示す、下部移動部材652L2の軸652L2aが上保持部652L1dの長丸穴652L1hの中心に対して上保持部652L1dに近い位置にある状態である。
図58(b)図59(a)に示す軸652L2aが長丸穴652L1hの中心に対して上保持部652L1dから離れた位置にある状態では、上部移動部材652L1に対して下部移動部材652L2は軸652L2aのみを支持し、軸652L2aを中心に矢印Y3、Y4方向に揺動可能である(フリーの状態)。このフリーの状態は、例えば前述の上部移動部材652L1の上保持部652L1dと下保持部652L2bの着座面652L2cの間に設けられた圧縮ばね652Lspの力により上部移動部材652L1に対して下部移動部材652L2は軸652L2aのみを支持し揺動可能に保たれる。
図58(c)図59(b)に示す軸652L2aが長丸穴652L1hの中心に対して上保持部652L1dに近い位置にある状態では、上部移動部材652L1の先端部652L1aが、角穴部652L2hに入り、下部移動部材652L2は軸652L2aを中心とした揺動が規制される(ロックの状態)。このロックの状態は、後述する上部移動部材652L1が画像形成装置本体から押圧された時の構成であり、上部移動部材652L1が下部移動部材652L2は一体となる。
[移動部材の動作説明]
[移動部材の動作説明]
次に、移動部材652Lの動作について図60(a)~(d)を用いて説明する。実施例1で説明したように、プロセスカートリッジ600を画像形成装置本体170に挿入完了した後、前ドア11を閉じる動作と連動し、カートリッジ押圧ユニット190により移動部材652Lが押圧される。その時の移動部材652Lの動作について説明する。図60(a)、(b)図61(a)は、前記図58(b)、図59(a)で説明したフリーの状態で、画像形成装置本体内においては移動部材652Lがカートリッジ押圧機構190によって押されていない状態を示す。図60(c)、(d)及び図61(b)は、前記図58(c)、図59(b)で示したロックの状態で、画像形成装置本体内においては移動部材652Lがカートリッジ押圧機構190によって押されている状態を示している。
まず、図60(a)、(b)を用いて、付与部材652Lがカートリッジ押圧機構190によって押されていない状態(フリーの状態)を説明する。プロセスカートリッジ600において上部移動部材652L1は軸受627の揺動軸HEに長丸穴652L1h2が嵌合することにより、長丸穴の長手方向及びZA方向に移動可能かつ、軸HEを中心に揺動可能である。この時、下部移動部材652L2は前述のように上部移動部材652L1に対して軸部652L2aを中心に揺動可能な状態である。
この揺動可能な状態(フリーの状態)において下部移動部材652L2は、後述する画像形成装置本体へ挿抜する際、実施例1で説明した移動部材に係合する離間制御部材196Lとの係合を回避する。例えば、図60(b)と図60(b)に示す着座面652L2c部を拡大した図63に示すように下部移動部材652L2が圧縮ばね652Lspの付勢力を受けることで上部移動部材652L1に対してY3方向に揺動した状態を保持して回避する。そのために、上部移動部材652L1の上保持部652L1dに対して下部移動部材652L2がY3方向に揺動した状態で下部移動部材652L2の着座面652L2cが正対する面とする。これにより、上部移動部材652L1と下部移動部材652L2の間に設けられた圧縮ばね652Lspの弾性力によって着座面652L2cが上保持部652L1dに正対するように下部移動部材652L2に対して軸部652L2aを中心にしてY3方向にモーメントが働くことで揺動した状態を維持する。
次に図60(c)、(d)を用いて、移動部材652Lがカートリッジ押圧機構190によって押されている状態(ロックの状態)の動作について説明する。
上部移動部材652L1はカートリッジ押圧機構190を押し下げることにより、ばね652Lspに抗して下部移動部材652L2に向かって移動する。下部移動部材652L2は軸652L2aが軸受627の円弧状ガイドリブ627gに当接することでカートリッジ押圧機構190が押し下げる方向に対して付勢される。そして、図60(c)(d)及び図61(b)で示すように下部移動部材652L2に向かって移動した上部移動部材652L1の先端部652L1aが、角穴部652L2hに入っていくことで下部移動部材652L2は軸652L2aを中心に揺動し、前述のように上部移動部材652L1と下部移動部材652L2は一体となる。この状態で、一体となった移動部材652Lは図60(c)で示すように、移動部材揺動軸HEを回転中心とし、回転半径RxでX4方向、X5方向に揺動する。この状態で、第一力受け部(退避力受け部、離間力受け部)652Lkで力を受けた場合、移動部材652LはX4方向に回転して離間時押圧部652Lqが軸受627の離間時被押圧部である円弧状ガイドリブ627gを押圧する。これによって現像ユニット109を現像位置から退避位置に向かう方向に移動させることができる。この状態で、第二力受け部(当接力受け部)652Lnで力を受けた場合、移動部材652LはX5方向に回転して当接時押圧部652Lrがスペーサ651Lの当接時被押圧部621Leを押圧する。これによってスペーサ651Lを規制位置(第1位置)から許容位置(第2位置)へ移動させることができる。このように移動部材652Lがロック状態にあるとは、第一力受け部(退避力受け部、離間力受け部)652Lk、第二力受け部(当接力受け部)652Lnが受けた力を離間時押圧部652Lq、当接時押圧部652Lrへ伝達可能な伝達可能状態である。
詳細については後述するが、カートリッジ押圧機構190に押された状態においては、移動部材652Lは実施例1における移動部材152Lと同一の動きをとる事が可能になる。尚、スペーサ(保持部材)651Lは実施例1と同様の構成によって651Lf部に付勢部材153(本実施例では簡単のため不図示)で時計方向に回転するよう付勢してされている。
[プロセスカートリッジの画像形成装置本体への装着]
[プロセスカートリッジの画像形成装置本体への装着]
次に、第6の実施形態におけるプロセスカートリッジ挿入時の移動部材652Lの動作について図62(a)~(d)を用いて説明する。図62(a)はプロセスカートリッジ600を画像形成装置本体170に挿抜する途中の状態を長手方向から示した図である。図62(b)はプロセスカートリッジ600を画像形成装置本体170に挿抜する途中の状態を挿入方向から示した図である。図62(c)はプロセスカートリッジ600を画像形成装置本体170に挿入され前ドア11が閉められた状態を長手方向から示した図である。図62(d)はプロセスカートリッジ600を画像形成装置本体170に挿入され前ドア11が閉められた状態を挿入方向から示した図である。前述のように上部移動部材652L1が押されていない状態(フリーの状態)においては図58(b)で示すように下部移動部材652L2は軸部652L2aを回転中心として揺動可能である。
図62(a)、(b)に示すように、プロセスカートリッジ600を装着した不図示のカートリッジトレイ171を画像形成装置本体170内に矢印X1方向に挿入、あるいは矢印X2方向に抜き出す際に、離間制御部材196Lに対して下部移動部材652L2の先端側の部分は長手方向(Y1方向)に退避した状態で挿抜される。これは、圧縮ばね652Lspの作用によって下部移動部材652L2は図58(b)、図59(a)に示す状態で保持されているからである。
しかしながら、必ずしも下部移動部材652L2の先端側の部分が長手方向(Y1方向)に退避した状態で保持されるような構成である必要は無い。別の構成を図64に示す。図64(a)はプロセスカートリッジ600を画像形成装置本体170に挿抜する途中の状態を長手方向から示した図である。図64(b)はプロセスカートリッジ600を画像形成装置本体170に挿抜する途中の状態を挿入方向から示した図である。図64(c)は図64(b)に示すQ−Q断面図である。図64(d)は図64(c)の状態からさらにプロセスカートリッジ600をX1方向に挿入した状態のQ−Q断面図である。
図64に示す構成では離間制御部材196Lに対して下部移動部材653L2の斜面653L2dを衝突させて、挿抜方向(X1、X2方向)の力で図64(c)に示す離間制御部材196Lと下部移動部材653L2がY1、Y2方向で重なった状態から、図64(d)に示す離間制御部材196Lに下部移動部材653L2が接触することで、下部移動部材652L2の先端側の部分が長手方向(Y1方向)に退避するように構成しても構わない。このように、プロセスカートリッジ600を画像形成装置本体170に挿抜する際は、移動部材652Lはフリーの状態である。
尚、本実施例では、カラー画像形成装置に使用するプロセスカートリッジについての説明である。したがって4個のプロセスカートリッジ及び4個の離間制御部材が存在する。その為ステーションによっては図62で示される動作が最大4回繰り返されることになる。
次に図62(c)、(d)に示すように、画像形成装置本体170内にプロセスカートリッジ600が挿入され前ドア11が閉められると、前述のように移動部材652Lはカートリッジ押圧機構190によって矢印Z2方向押し下げられる。これにより、揺動可能であった下部移動部材652L2は上部移動部材652L1に対して揺動不能となり、これらが一体化した状態(ロックの状態)となる。この状態の移動部材は、実施例1で示した移動部材152と実質的に同一の役割を担うことになる。
[駆動側離間当接機構の構成]
[駆動側離間当接機構の構成]
図65はプロセスカートリッジ600の現像ユニット部分の駆動側の構成を示した外観図である。図66はプロセスカートリッジ600の斜視図である。本実施例においては、非駆動側の離間当接機構を用いて構成を説明したが、駆動側の構成についても同様の構成であるので、詳細な説明は割愛する。駆動側の移動部材652Rは、実施例1における移動部材152Rに相当する部材であり、非駆動側の移動部材652Lと同様に、上部移動部材652R1と下部移動部材652R2を連結した構成である。
[駆動側、非駆動側の離間当接機構]
[駆動側、非駆動側の離間当接機構]
本実施例においては、非駆動側に移動部材652L、駆動側に移動部材652Rを配置している。他の形態として非駆動側のみ移動部材652L設ける構成でも良い。また、駆動側のみ移動部材652Rを設ける構成でも良い。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。
また、本実施例では、第一力受け部(退避力受け部、離間力受け部)652Lkと第二力受け部(当接力受け部)652Lnを備える下部移動部材652L2を、上部移動部材652L1及びプロセスカートリッジ600の他の部分に対して移動可能とした。本実施例においてはその移動によって、第一力受け部652Lkと第二力受け部652LnはY1方向(実施例1の回転軸線M1及び回転軸線M2に平行な方向)に少なくとも変位する。そして、部移動部材652L2が、移動可能な状態(フリーの状態)と、上部移動部材652L1に対して固定された状態(ロック状態)を上部移動部材652L1の位置によって切り替え可能とした。これにより、プロセスカートリッジ600を装置本体170内への挿入又は抜き出す際に、上記フリーの状態をとることで、下部移動部材652L2と装置本体170、特に離間制御部材196Lとが干渉して挿入又は抜き出しできなくなることを回避することができる。
次に、図67~図72を用いて、本発明の実施例5について説明する。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
本実施例では、プロセスカートリッジ400の離間当接機構の移動部材452が、現像ユニット109の中で収納位置から突出位置へ移動することなく動作する構成について説明する。移動部材は収納位置から突出位置へ移動しないが、現像ユニット109またはプロセスカートリッジ400の上下移動によって同様の作用を行う。なお、画像形成装置本体170を水平面上に設置した際の鉛直方向はZ1方向、Z2方向である。
[プロセスカートリッジ400の構成]
[プロセスカートリッジ400の構成]
プロセスカートリッジ400は駆動側に離間当接機構450R、非駆動側に離間当接機構450Lを有する。なお離間当接機構について、まず駆動側の離間当接機構450Rの詳細を説明した後、非駆動側の離間当接機構450Lの説明を行う。また、離間当接機構については駆動側、非駆動側でほぼ同一機能を有しているため、駆動側については各部材の符号末尾にRを付する。非駆動側については各部材の符号を駆動側と同一にして、末尾にLを付する。
図67は離間当接機構450Rを含むプロセスカートリッジ400の駆動側の組立斜視図を示す。離間当接機構450Rは、規制部材(保持部材)であるスペーサ151R、押圧部材である移動部材452R、引っ張りバネ153を有する。移動部材452Rは、丸い貫通穴である支持受け部452Raが設けられている。また図69に示すように移動部材452Rは現像ユニットからZA方向に突出可能な突出部452Rhを備え、突出部452Rhには第一力受け部(退避力受け部、離間力受け部)452Rkと第二力受け部(当接力受け部)452Rnが設けられている。移動部材452Rは、現像カバー部材428の第二抜け止部428mに揺動可能に取り付けられる。
現像支持部材401Rは、現像カバー部材428の端面に取り付けられる。現像支持部材401Rには、支持円筒410Raと支持バネ受け部401b、位置決め受け部401Rcが設けられている。現像支持部材401Rは支持円筒401Raの内面が現像カバー部材428の円筒部428bと嵌合して取り付けられている。また、支持円筒401Raの外面はドラムユニット408のドラム枠体の一部を構成する駆動側カートリッジカバー部材416の現像ユニット支持穴416aにZA方向に移動可能に支持されている。また、現像支持部材401Rには、スライドガイド401Reが設けられている。スライドガイド401Reは、駆動側カートリッジカバー部材416に設けられたガイド突起416eと嵌合して、溝方向へ移動可能に動きを規制されることで正しい姿勢に位置決めされる。スライドガイド401Reは、後述する現像ユニット409が上下動するZA方向と平行の溝になっている。支持方法については更に後述する。
現像支持バネ402は、一端が駆動側カートリッジカバー部材416に取り付けられている。この現像支持バネ402の他端側は、組み付けられた現像支持部材401Rの支持バネ受け部401Rbと接する位置に配置されている。これによって、現像支持バネ402は駆動側カートリッジカバー部材416に対して現像支持部材401RをZA方向の逆方向へ持ち上げる力を与えている。
図68は離間当接機構450Lを含むプロセスカートリッジ400の非駆動側の組立斜視図を示す。離間当接機構450Lの組付け状態については説明する。
非駆動側軸受け部材427は、現像枠体125に固定されて現像ローラ106およびトナー搬送ローラ107を回転可能に支持している。非駆動側軸受け部材427は、現像支持部材401Lを支持するための支持円筒部427a、スペーサ151Lを支持するための支持部427b、および移動部材452Lを支持するための支持部427fを持っている。また図70に示すように移動部材452Rは現像ユニットからZA方向に突出可能な突出部452Lhを備え、突出部452Rhには第一力受け部(退避力受け部、離間力受け部)452Lkと第二力受け部(当接力受け部)452Lnが設けられている。
現像支持部材401Lは、長丸穴401Lbを非駆動側軸受け部材427の支持円筒部427aに嵌合させることで支持されている。この長丸穴は、現像ユニット409を支持する箇所の駆動側と非駆動側の製造誤差によるズレを許容するために非駆動側の支持部401Lbに設けられている。
現像支持部材401Lは、長丸穴401Lbを覆うように円筒部401Laが設けられている。円筒部401Laは、非駆動側カートリッジカバー部材417の現像ユニット支持穴417aに支持されている。
また、現像支持部材401Lには、ガイド突起401Leが設けられている。ガイド突起401Leは、非駆動側カートリッジカバー部材417に設けられた溝状のスライドガイド417eと嵌合して、溝の長手方向(ZA方向)へ移動可能に動きを規制されることで正しい姿勢に位置決めされる。スライドガイド417eは、後述する現像ユニット409が上下動するZA方向と平行の溝になっている。支持方法については更に後述する。
現像支持部材401Lが、現像支持バネ402によって非駆動側カートリッジカバー部材417に対して上向きである矢印Z1方向へ持ち上げる力を得ている。
図69は、プロセスカートリッジ400を駆動側から見た側面図を、図70は非駆動側から見た側面図を示している。
図69を用いて組立完成状態の駆動側の機構について説明する。
現像ユニット409は、現像支持部材401Rの支持円筒401Raが、駆動側カートリッジカバー部材416の現像ユニット支持穴416aに支持されている。現像ユニット支持穴416aは、矢印ZA方向に長丸穴になっている。これにより、現像支持部材401Rは現像ユニット支持穴416aの中をZA方向およびその反対方向に移動可能である。現像支持バネ402を透視図として破線で示した。現像支持バネ402は、現像支持部材401Rの支持バネ受け部401bをZA方向の逆方向へ押し上げている。現像ユニット409を支持している現像支持部材401RがZA方向の逆方向へ押し上げられているので、現像ユニット409は駆動側カートリッジカバー部材416の中でZA方向の逆方向に持ち上げられている。
この図はプロセスカートリッジ400が装置本体170の外にある状態で、感光ドラムと現像ローラは離間している。他の実施例と同様に、スペーサ151Rは駆動側カートリッジカバー部材416の当接面416cと当接して現像ユニット109が感光ドラムに近づかないように規制している。
図70を用いて組立完成状態の非駆動側の機構について説明する。現像支持部材401Lの支持円筒401Laは、非駆動側カートリッジカバー部材417の現像ユニット支持穴417aに支持されている。現像ユニット支持穴417aは、駆動側の支持穴416aの長穴方向と同じZA方向に平行な二つの面417a1および417a2によって支持円筒402Laを移動可能に支持している。また、下側規制面417a3によって現像支持部材401Lの移動量を規制している。非駆動側カートリッジカバー部材417は、現像ユニット支持穴417aによって現像支持部材410LをZA方向およびその反対方向に移動可能に支持している。
現像支持バネ402Lは、現像支持部材401Lの支持バネ受け部401LbZA方向の反対方向へ押し上げている。現像ユニット409を支持している現像支持部材401LがZA方向の反対方向へ押し上げられているので、現像ユニット409は非駆動側カートリッジカバー部材417の中でZA方向の反対方向に持ち上げられている。
[プロセスカートリッジを装置本体に装着するときの動作]
[プロセスカートリッジを装置本体に装着するときの動作]
次に、図71を用いてプロセスカートリッジ400を装置本体170に装着するときの動作について説明する。図71は、プロセスカートリッジ400と、装着に関わる装置本体170の部品とを駆動側から見た側面図である。図71(a)は、プロセスカートリッジ400が、上方にある装置本体170の押圧機構191と、下方にある現像離間制御ユニット195の間を矢印X1方向に移動しながら装着される途中を示している。なお、押圧機構191の動作機構(前ドア11の開閉に連動してZ1、Z2方向へ移動する機構)は実施例1と同じであるため詳細な説明は省略する。移動部材452Rが、離間制御部材196Rの手前まで進行している状態である。プロセスカートリッジ400は、図5で示したトレイ171に乗せられた状態で移動するが、図を簡略化するため、トレイ171の全体は記載せず、駆動側カートリッジカバー部材416を支持する部分のみ破線で示した。
図71(b)は、プロセスカートリッジ400がX1方向へ進行し、移動部材452Rが、離間制御部材196の上方にある状態を示している。図71(a)から図71(b)の行程で、移動部材452Rは現像ユニット409とともに矢印Z1方向に持ち上げられ収納位置(待機位置)あるので、離間制御部材196Rと衝突しない。
図71(c)は、プロセスカートリッジ400がX1方向において画像形成装置本体170に対する装着位置まで進行した状態を示している。そして、押圧機構191が、現像支持部材401の被押圧部401Rcを矢印Z2方向に押し始めている状態を示している。現像支持部材401が押圧機構191によって少なくともZ2方向へ押されることで、現像ユニット409全体がZA方向(所定方向)へ移動し、移動部材452RもZA方向(所定方向)に移動して、離間制御部材196の空間196Rdの中に進入した突出位置(稼働位置)へ到達する。この時、図69で説明した現像支持バネ402は、押圧機構191からの力によって圧縮される。そして、現像支持部材401は現像ユニット支持穴416aの長丸穴に沿ってZA方向へ移動する。ZA方向はX1方向と直交する方向である。
図71(d)は、押圧機構191が図71(c)の状態から矢印Z2方向へさらに移動した後の状態を示している。押圧機構191は、現像支持部材401の位置決め受け部410Rcを矢印Z2方向に押圧し、押し下げる。これにより現像ユニット409全体が矢印ZA方向に押し下げられ、移動部材452Rが離間制御部材196の空間196Rdに入り込む。この状態でプロセスカートリッジ400の装置本体170への装着が完了する。
この時、現像支持バネ402のZA方向の反対方向へのばね力は押圧機構191の押圧力より低く設定しておく。また、現像支持バネ402はZA方向に伸縮するようにバネを配置するのが望ましいが、適切にバネ力を設定すればZA方向成分を含む他の方向に伸縮するように配置も選択することができる。
プロセスカートリッジ400を装置本体170から取り外す時の動作は、上述した装着時の動作を逆に行うものであるので、説明は省略する。
[現像ユニットの当接動作及び離間動作]
[現像ユニットの当接動作及び離間動作]
装着されたプロセスカートリッジ400の現像ユニット109が感光ドラムに当接および離間する動作を図72を用いて説明する。
図72は駆動側からみた側面図であり、図71から押圧機構191を不図示にしたものである。
図72(a)は、現像ユニット109を感光ドラムに当接させるための動作を説明する図である。離間制御部材196Rが矢印W42方向へ移動すると、移動部材452Rが押されて動く。このとき、移動部材452Rは、丸穴である支持受け部452Raを中心に矢印BC方向に揺動する。スペーサ151Rは、揺動した移動部材452Rに押されて矢印B2方向へ揺動する。スペーサ151Rは当接面416cから移動して第二規制面416dに入り込んで感光ドラムと現像ユニット109との距離規制をなくして現像ユニット409を当接状態にする。
図72(b)は、現像ユニット109が感光ドラムに当接している状態を維持している図である。図72(a)でW42方向へ移動した離間制御部材196Rは再びW41方向に戻っている。空間196Rdが広く設定してあるので、離間制御部材196Rと移動部材452Rは接触しない。移動部材452Rは前述の当接状態を維持している。
図72(c)は、現像ユニット109を再び離間させるときの動作を説明する図である。図72(b)の状態から離間制御部材196Rが更にW41方向へ移動すると、離間制御部材196Rと移動部材452Rが接触する。そして移動部材452Rは矢印BD方向へ揺動し、現像カバー部材428と接触する。移動部材452Rが現像カバー部材428と接触してから更にBD方向へ回転させられると、現像ユニット109ごと揺動して離間状態になる。この時、移動部材452Rとスペーサ151Rは引っ張りバネ153で連結されており、矢印B1方向に回転する。回転したスペーサ151Rは、当接面416cに当接することで現像ユニット109を離間状態に規制する。この後、離間制御部材196RがW42方向へ移動し、図71(d)まで戻ると、現像ユニット109は離間制御部材196Rの力を受けることなく離間状態を維持する。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。
また、本実施例では第一力受け部452Rk、452Lkと第2力受け部452Rn、452Lnを備える移動部材425が現像ユニット409と一体的に収納位置(待機位置)と突出位置(稼働位置)との間を移動する構成とした。この移動によって、第一力受け部452Rk、452Lkは方向VD1(図40等)、方向VD10(図236等)、方向VD12(図238)、方向VD14(図239)に少なくとも変位する。このような構成によっても、プロセスカートリッジ400を装置本体170内への挿入又は抜き出す際に移動部材42が装置本体170、特に離間制御部材196Lと干渉することを回避することができる。
<実施例5の別形態>
<実施例5の別形態>
更に別の構成を用いてプロセスカートリッジ430の離間当接機構において押圧部材である移動部材が、現像ユニット109の中で収納位置(待機位置)から突出位置(稼働位置)へ移動することなく動作する構成について図73から図78を用いて説明する。
ここで説明する構成は、装置本体170へのプロセスカートリッジ430の装着の際に、プロセスカートリッジ430が装着方向と直交する方向で退避して最終的に離間制御部材196と係合する構成である。
図73を用いて特徴的な構成を説明する。図73(a)には、この構成におけるプロセスカートリッジ430の駆動側からみた側面図を示した。現像ユニット439の支持構成は、実施例1で説明した構成と同じである。すなわち、現像カバー部材428の円筒部428bが、駆動側カートリッジカバー部材431Rの現像ユニット支持穴431Raによって回動可能に支持されている。ここで、現像ユニット支持穴431Raは円筒形状である。従って、本別形態においては、実施例5の構成と異なり、現像ユニット439は、ガタによる移動を除いて、駆動側カートリッジカバー部材(ドラム枠体)431R及びドラムユニット438に対してZ2方向に動くことはできない。
駆動側カートリッジカバー部材431Rには、二箇所に圧縮コイルバネ(弾性部材)を取り付けてある。一つは駆動側カートリッジカバー部材431Rの回転決め凹部431KRの中に設けた第一の駆動側支持バネ435Rである。バネ435Rはその下端側に先端部435Raを備える。もう一つは、駆動側支持バネ取り付け部431MRに取り付けた第二の駆動側支持バネ434Rである。バネ434Rはその下端側に先端部434Raを備える。
図73(b)には、プロセスカートリッジ430の非駆動側からみた側面図を示した。非駆動側のカートリッジカバー部材431Lは、実施例1の図13と同様に現像ユニット409を回転可能に支持している。非駆動側カートリッジカバー部材431Lには、二箇所に圧縮コイルバネ(弾性部材)を取り付けてある。一つは非駆動側カートリッジカバー部材431Lの回転決め凹部431KLの中に設けた第一の非駆動側支持バネ435Lである。バネ435Lはその下端側に先端部435Laを備える。もう一つは、非駆動側支持バネ取り付け部431MLに取り付けた第二の非駆動側支持バネ434Lである。バネ434Lはその下端側に先端部434Laを備える。
これら先端部434Ra、435Ra、434La、435Laはトレイ171に接触して支持される被支持部である。また、これら先端部434Ra、435Ra、434La、435Laはドラム枠体(第1枠体)の一部を構成する駆動側カートリッジカバー部材431R、非駆動側のカートリッジカバー部材431LをZ2方向に移動可能に支持する支持部でもある。ここで現像ユニット409(又は現像枠体)(第2枠体)はドラム枠体に支持されている。このため、これら先端部434Ra、435Ra、434La、435Laは、ドラム枠体を介して現像ユニット409(又は現像枠体)をZ2方向に移動可能に支持していると言える。
次に、図74を用いてプロセスカートリッジ430がトレイ171に装着されるときの、第一の駆動側支持バネ435Rと、第二の駆動側支持バネ434Rおよびトレイ171の相対位置を説明する。図74は、プロセスカートリッジ430をトレイ171に装着するために矢印Z2方向に移動させる途中である。この状態は、プロセスカートリッジ430はまだZ2方向に移動可能な状態であり、トレイ171に位置決めされていない。
駆動側カートリッジカバー部材431Rに設けられた第一の駆動側支持バネ435Rは、プロセスカートリッジ430を更にZ2方向に進めると、先端部435Raがトレイ171の回転決め凸部(第1バネ支持部)171KRに当接して支持される。また、第二の駆動側支持バネ434Rは、プロセスカートリッジ430をZ2方向に進めると、先端部434Raがトレイ171のバネ受け部(第2バネ支持部)471MRに当接して支持される。
一方、非駆動側においても、第一の非駆動側支持バネ435Lの先端部435Laが、トレイ17の不図示の回転決め凸部(第3バネ支持部)に当接して支持される。また、第二の非駆動側支持バネ434Lの先端部434Laが、トレイ17の不図示のバネ受け部(第4バネ支持部)に当接して支持される。
[プロセスカートリッジを装置本体に装着するときの動作]
[プロセスカートリッジを装置本体に装着するときの動作]
次に図75から図78を用いて、プロセスカートリッジ430がトレイ171の上に置かれた状態から、画像形成装置本体170の中で画像形成を行う位置に位置決めされるまでの工程を説明する。図75から図78は、駆動側から見た側面図を示している。これらの図において、簡単のため、状態を説明するために関連する構成以外を不図示にしている。非駆動側は駆動側と同様の構成であり、同様の動作をするため、説明は省略する。
図75には、トレイ171の上に置かれたプロセスカートリッジ430がトレイ171と共に矢印X1方向に進行した状態を示した。図74で説明したように、第一の駆動側支持バネ435Rの先端部435Raは、トレイ171の回転決め凸部171KRに当接している。また、第二の駆動側支持バネ434Rの先端部434Raは、トレイ171のバネ受け部471MRに当接している。
第一の駆動側支持バネ435Rと第二の駆動側支持バネ434Rは、トレイ171に支えられることでプロセスカートリッジ430のドラム枠体及び現像枠体部分を重力に抗して支持している。これにより、プロセスカートリッジ430の駆動側カートリッジカバー部材431Rに設けられた被位置決め部である円弧431VRは、トレイ171の位置決め部である直線部171VR1および171VR2とギャップG4を残して接触してない。つまり、プロセスカートリッジ430は、第一の駆動側支持バネ435Rと第二の駆動側支持バネ434Rによってトレイ171の位置決め部に対してZ1方向に支持されている。このため、トレイ171を装置本体170に挿入する際にプロセスカートリッジ430が矢印X1に移動する際、移動部材452Rが離間制御部材196Rと衝突しないで通過することが出来る。移動部材452Rは収納位置(待機位置)にある状態であると言える。この際、カートリッジ押圧機構191は、駆動側カートリッジカバー部材431Rの天面431Rcと隙間G5をもって待機している状態である。
図76は、前ドア11を閉じることに連動して、カートリッジ押圧機構191が矢印Z2方向に移動し、駆動側カートリッジカバー部材431Rの天面431Rcと接触した状態を示している。第一の駆動側支持バネ435Rと第二の駆動側支持バネ434Rは、まだカートリッジ押圧機構191から力を受けず、プロセスカートリッジ430は移動していない。図77は、さらにカートリッジ押圧機構191が矢印Z2方向に移動して駆動側カートリッジカバー部材431Rの天面431RcをZ2方向に押し始めている状態を示している。プロセスカートリッジ430はZA方向に移動し、第一の駆動側支持バネ435Rと第二の駆動側支持バネ434Rは圧縮される。プロセスカートリッジ430のトレイ171との位置決め部である円弧431VRは接近するが、トレイの直線部171VR1および171VR2とギャップG6を残して接触していない。移動部材452Rは、プロセスカートリッジ430がZA方向に移動したことで離間制御部材196Rの空間196Rdに入っている。
図78は、さらにカートリッジ押圧機構191が矢印Z2方向に移動してプロセスカートリッジ430がトレイ171に位置決めされた状態を示している。
カートリッジ押圧機構191のZ2方向への移動によって、プロセスカートリッジ430はZA方向に移動して、最終的に円弧431VRがトレイ171の直線部171VR1および171VR2に接触する。これによって、プロセスカートリッジ430のトレイ171に対するZ2方向に関する位置が決まる。移動部材452Rは、プロセスカートリッジ430がZ2方向に移動したことで離間制御部材196Rの空間196Rdに最終的な位置まで入っている。この時、移動部材425Rは突出位置(稼働位置)にある状態であると言える。このため、離間制御部材196Rが移動することによって、移動部材452Rを移動させ、プロセスカートリッジ430の当接状態、離間状態を切り替えることができる。
矢印Z2方向に移動するカートリッジ押圧機構191に押圧されてプロセスカートリッジ430が移動するZA方向(移動部材425Rが待機位置から稼働位置へ移動する方向)は矢印Z2方向と平行でなくても良い。即ち、ZA方向は、少なくともX1方向に直交する方向の成分を含めば良い。
円弧431VRが直線部171VR1および171VR2に接触した状態における、第一の駆動側支持バネ435Rと第二の駆動側支持バネ434Rのバネ力(付勢力)をカートリッジ押圧機構191の力よりも小さく設定してある。このため、確実にプロセスカートリッジ430をトレイ171に対して位置決めすることが出来る。
装着完了後は図72で説明した動作と同じであるので説明は省略する。
プロセスカートリッジ430を装置本体170から取り外す時の動作は、上述した装着時の動作を逆に行うものであるので、説明は省略する。
以上説明した本別形態の構成によれば、実施例1と同様の効果を得ることができる。
また、本別形態では第一力受け部452Rk、452Lkと第2力受け部452Rn、452Lnを備える移動部材425がドラムユニット438及び現像ユニット439(ドラム枠体及び現像枠体)と一体的に収納位置(待機位置)と突出位置(稼働位置)との間を移動する構成とした。この移動によって、第一力受け部452Rk、452Lkと第2力受け部452Rn、452Lnは方向VD1(図40等)、方向VD10(図236等)、方向VD12(図238)、方向VD14(図239)に少なくとも変位する。このような構成によっても、プロセスカートリッジ430を装置本体170内への挿入又は抜き出す際に移動部材42が装置本体170、特に離間制御部材196Lと干渉することを回避することができる。
本実施例では、本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例ではプロセスカートリッジの離間当接機構において、本体側の部品に押圧されない構成により、移動部材がスペーサに力を付与する構成について説明する。
本実施例の[離間当接機構の構成]、[現像ユニットの当接動作]、[現像ユニットの離間動作]、[プロセスカートリッジの画像形成装置本体への着脱]に関して具体的に説明する。その他のプロセスカートリッジの構成については前述した実施例と同様のためここでは省略する。
[離間当接機構の構成]
[離間当接機構の構成]
本実施例におけるプロセスカートリッジ1400の感光ドラム104と、現像ユニット1409が有する現像ローラ106とが、離間および当接を行う構成について詳細に説明する。プロセスカートリッジは駆動側に離間当接機構1450R、非駆動側に離間当接機構1450Lを有する(図79)。図80は離間当接機構1450Rを含む現像ユニット1409の駆動側の組立斜視図を示す。図81は離間当接機構550Lを含む現像ユニット1409の非駆動側の組立斜視図を示す。ここでは駆動側の離間当接機構1450Rの詳細を説明する。尚、離間当接機構については駆動側、非駆動側ほぼ同一機能を有しているため、駆動側については各部材の符号にRを記載する。非駆動側については各部材の符号を駆動側と同一にして、Rの代わりにLを記載する。そして駆動側の構成及び動作を代表として説明し非駆動側の構成及び動作についての説明は省略する。
離間当接機構1450Rは規制部材(保持部材)であるスペーサ1451R、押圧部材である移動部材1452R、引っ張りバネ1453を有する。
スペーサ1451Rは円環状の被支持部1451Ra、カートリッジカバー1416の被当接面(被当接部)1416cと接触する当接面(当接部)1451Rc、引っ張りバネ1453と係合するばね掛け部1451Rg、移動部材1452Rと係合する第二被押圧面1451Reを有する。また、現像カバー部材1428の第一支持部1428cに回動可能に保持されている。その他の構成は前述した実施例1と同様の構成である。
移動部材1452Rは現像カバー部材1428の第三支持部1428mに移動部材1452Rの支持受け部1452Raが係合し、回動可能に保持されている。また、移動部材1452Rは装置本体170に設置された離間制御部材196Rと係合可能な第一力受け面1452Rm、第二力受け面1452Rpを有し、引っ張りバネ1453と係合するばね掛け部1452Rs、スペーサ1451Rと係合する第二押圧面1452Rrを有する。なお、第一力受け面1452Rm、第二力受け面1452Rpは、それぞれ、実施例1と同様に、第一力受け部(退避力受け部、離間力受け部)、第二力受け部(当接力付与部)を構成している。
また、図82に示すように前述した実施例1と同様に引っ張りバネ1453はスペーサ1451Rを現像カバー部材1428の第一支持部1428cを回転中心としてB1方向に付勢する。また、移動部材1452Rを現像カバー部材1428の第三支持部1428mを回転中心としてCA方向に付勢する。
[現像ユニットの当接動作]
[現像ユニットの当接動作]
次に、離間当接機構1450Rによる、感光ドラム104と現像ローラ106が当接する動作について図82~図85を用いて詳細に説明する。なおこれらの図は説明のため、現像カバー部材1428の一部を部分的に省略した断面図である。
本実施例構成では、現像入力カップリング132は画像形成装置本体170から図82の矢印V2方向に駆動力を受け、現像ローラ106が回転する。つまり、現像入力カップリング132を有する現像ユニット1409は、画像形成装置本体170から矢印V2方向のトルクを受ける。図82に示すように現像ユニット1409が離間位置で、スペーサ1451Rが離間保持位置(規制位置、第1位置)において、現像ユニット1409がこのトルクおよび後述する現像加圧ばね134による付勢力を受けても、スペーサ1451Rの当接面1451Rcが駆動側カートリッジカバー部材1416の被当接面1416cに当接し、現像ユニット1409の姿勢は離間位置に維持される。
前述した実施例1と同様に本実施例においても画像形成装置本体170は、前述のように各プロセスカートリッジ1400に対応して、離間制御部材196Rを有している。離間制御部材196Rは、プロセスカートリッジ1400に向かって突出し、空間196Rdを介して互いに向かい合う第一力付与面196Raと第二力付与面196Rbを有する。第一力付与面196Raと第二力付与面196Rbは画像形成装置本体170下面側にて連結部196Rcを介して連結している。また離間制御部材196Rは回動中心196Reを中心として、制御板金(不図示)に回転自在に支持されている。離間制御部材196Rは付勢バネ(不図示)により常にE1方向に付勢され、不図示のホルダーによって回転方向を規制されている。また、制御板金(不図示)が不図示の制御機構によりホーム位置からW41及びW42方向に移動可能に構成されることにより、離間制御部材196RはW41、W42方向に移動可能に構成される。
離間制御部材196RがW42方向に移動すると、離間制御部材196Rの第二力付与面196Raと移動部材1452Rの第二力受け面1452Rpが当接し、移動部材1452Rが支持受け部1452Raを回転中心としてCB方向へ回転する。さらに移動部材1452Rの回転に伴って、移動部材1452Rの第二押圧面1452Rrがスペーサ1451Rの第二被押圧面1451Reと当接しながら、スペーサ1451RをB2方向へ回転させる。そしてスペーサ1451Rは、当接面1451Rcと被当接面1416cとが離れる離間解除位置(許容位置、第2位置)まで移動部材1452Rによって回転され、図83に示す状態となる。ここで図83に示す、スペーサ1451Rを離間解除位置に移動させる離間制御部材196Rの位置を第一位置と称する。
このように離間制御部材196Rによってスペーサ1451Rが離間解除位置に移動すると、現像ユニット1409は画像形成装置本体170から受けるトルクと現像加圧ばね134によってV2方向に回転し、現像ローラ106と感光ドラム104が当接する当接位置まで移動する(図83の状態)。この時、引張りばね1453によって矢印B1方向に付勢されるスペーサ1451Rは、第二被規制面1451Rkが駆動側カートリッジカバー部材1416の第二規制面1416dに当接することで離間解除位置に維持される。その後離間制御部材196RはW41方向へ移動しホーム位置へ戻る。この時、移動部材1452Rは引張りばね1453によってCB方向へ回転し、図84に示すように移動部材1452Rの第一押圧面1452Rqと現像カバー部材1428の第一押圧面1428kが当接した状態へ移行する(図80も参照)。
これによって隙間T3とT4が形成され、移動部材1452Rに対して離間制御部材196Rが作用しない位置に位置する。尚、図83の状態から図84の状態へ遷移は時間を置かずに行われる。
以上のように本実施例構成では、離間制御部材196Rがホーム位置から第一位置に移動することで、移動部材1452Rを回転させスペーサ1451Rを離間保持位置から離間解除位置に移動させることができる。これによって現像ユニット1409が離間位置から現像ローラ106と感光ドラム104が当接する当接位置まで移動することが可能となる。尚、図84の離間制御部材196Rの位置は図82の状態と同じである。
[現像ユニットの離間動作]
[現像ユニットの離間動作]
次に、離間当接機構1450Rによる、現像ユニット1409の当接位置から離間位置へ移動する動作について、図84、図85を用いて詳細に説明する。なおこれらの図は説明のため、現像カバー部材1428の一部を部分的に省略した断面図である。
本実施例における離間制御部材196Rはホーム位置から図84の矢印W41方向に移動可能に構成されている。離間制御部材196RがW41方向に移動すると、第一力付与面196Rbと移動部材1452Rの第一力受け面1452Rmが当接し、移動部材1452Rが支持受け部1452Raを回転中心としてCA方向へ回転する。そして移動部材1452Rの第一押圧面1452Rqが現像カバー部材1428の第一押圧面1428kと当接することで、現像ユニット1409は当接位置からV1方向へ回転する(図85の状態)。
スペーサ1451Rは、スペーサ1451Rの第二被規制面1451Rkと駆動側カートリッジカバー部材1416の第二規制面1416dが離れ、スペーサ1451Rは引張りばね1453の付勢力によって矢印B1方向に回転する。これによってスペーサ1451Rは、第二被押圧面1451Reが移動部材1452Rの第二押圧面1452Rrと当接するまで回転し、当接することで離間保持位置に移行する。現像ユニット1409が離間制御部材196Rによって当接位置から離間位置方向に移動し、スペーサ1451Rが離間保持位置に位置するとき、図85に示すように当接面1451Rcと被当接面1416cの間には隙間T5が形成される。ここで、図85に示す、現像ユニット1409を当接位置から離間位置方向に回転させ、スペーサ1451Rが離間保持位置に移動可能となる位置を、離間制御部材196Rの第二位置と称する。
そしてその後、離間制御部材196Rが矢印W42方向に移動して、第二位置からホーム位置に戻ると、スペーサ1451Rは離間保持位置を維持したまま、現像ユニット1409は画像形成装置本体170から受けるトルクと現像加圧ばね134によって矢印V2方向に回転し、当接面1451Rcと被当接面1416cが当接する。つまり、現像ユニット1409はスペーサ1451Rによって離間位置を維持した状態になり、現像ローラ106と感光ドラム104が離れた状態になる(図82および図79の状態)。なおこれによって隙間T3とT4が形成され、移動部材1452Rに対して離間制御部材196Rが作用しない位置に位置する(図82の状態)。尚、図85の状態から図82の状態への遷移は時間を置かずに実行される。
以上のように本実施構成では、離間制御部材196Rがホーム位置から第二位置に移動することで、スペーサ1451Rが離間解除位置から離間保持位置に移動する。そして、離間制御部材196Rが第二位置からホーム位置に戻ることで、現像ユニット1409がスペーサ1451Rによって離間位置を維持する状態になる。
[プロセスカートリッジの画像形成装置本体への着脱]
[プロセスカートリッジの画像形成装置本体への着脱]
次に図86~図101を用いて、プロセスカートリッジ1400が画像形成装置本体170に着脱される際のプロセスカートリッジ1400の離間当接機構1450Rと画像形成装置本体170の現像離間制御ユニット196Rの係合動作について説明する。なおこれらの図は説明のため、現像カバー部材1428の一部を部分的に省略した断面図である。
図86~図89は、カートリッジトレイ171が画像形成装置本体170の外側から画像形成可能位置まで挿入される途中のプロセスカートリッジ1400を駆動側から見た図である。また、プロセスカートリッジ1400と離間制御部材196R以外は省略している。図86~図89と同じ時点における、プロセスカートリッジ1400を非駆動側から見た図は図94~図97である。
図90~図92は、トレイ171挿入後に後述する画像形成装置のイニシャル動作によってプロセスカートリッジ1400が離間保持されるまでの図である。図93はカートリッジトレイ171を画像形成可能位置から画像形成装置本体170の外側まで引き出す途中のプロセスカートリッジ1400と離間制御部材196R以外を省略し、プロセスカートリッジ1400の駆動側から見た図である。図90~図92と同じ時点における、プロセスカートリッジ1400を非駆動側から見た図は図98~図101である。
なお、画像形成装置本体170は複数のプロセスカートリッジ1400を装着し画像形成を行うため、プロセスカートリッジ1400の数に対応して離間制御部材196Rが存在する。このため、本実施例においては、便宜上、離間制御部材196R(196L)の末尾に数字を付与することで複数の離間制御部材196R(196L)を区別して示す。
図86のようにトレイ171(不図示)に載った状態のプロセスカートリッジ1400を画像形成装置本体170の内部の方向であるX2の方向に挿入する際に移動部材1452Rの第二力受け面1452Rpが離間制御部材196R−1の挿入方向上流側面196R−1pに接触する。さらに挿入すると図87に示すように、移動部材1452Rの第二力受け面1452Rpは離間制御部材の挿入方向上流側面196R−1qに接触しながらカートリッジの挿入動作が行われる。このとき、引張りばね1453による力は、離間制御部材196RをE1方向に付勢する付勢バネ(不図示)による力より弱く設定されており、移動部材1452Rと離間制御部材196Rが接触すると移動部材1452Rが回動して逃げる構成になっている。また、移動部材1452R及びスペーサ1451Rは図83の状態より大きくB2方向(離間保持位置から離間解除位置へ向かう方向)、CB方向へ回動するように構成されている。
このため、移動部材1452Rの第二力受け面1452Rpが離間制御部材196R−1の上面196R−1qに乗った状態となる。このため移動部材1452Rは離間保持位置から離間解除位置へ移動し、プロセスカートリッジ1400は離間状態から当接状態へと移行する。
この状態から更にトレイ171(不図示)を挿入すると図88のように離間制御部材196R−1の隣の離間制御部材196R−2に接触する。離間制御部材196R−1と同様に離間制御部材196R−2の挿入方向上流側面196R−1p、上面196R−2qに接触しながら挿入される。この時もプロセスカートリッジ1400は当接状態が維持されたままである。離間制御部材196R−1を通過した後もプロセスカートリッジ1400は当接状態が維持される。上面196R−2qに接触すると、これに接触する前と比べ、移動部材1452R及びスペーサ1451Rは、より大きくB2方向(離間保持位置から離間解除位置へ向かう方向)、CB方向へ回動することで上面196R−2qを通過する。このため、上面196R−2qを通過した後は、プロセスカートリッジ1400の当接状態は維持したまま、移動部材1452R及びスペーサ1451Rは、B1方向、CA方向へわずかに回動する。他の2つの離間制御部材196R−3、196R−4を通過する際も同様である。
そしてトレイ171(不図示)が画像形成可能な位置まで挿入した図が図89である。この状態では移動部材1452Rの第二力受け面1452Rpが離間制御部材196Rの上面196R−2sに乗った状態である。
このままではプロセスカートリッジ1400の当接動作及び離間動作ができない。しかし、画像形成装置本体170は前ドアを閉めた後、画像形成(紙等の記録媒体へのプリント)を行う前にイニシャル動作を実行する。このイニシャル動作において、離間制御部材196Rは前述した当接動作そして離間動作を行う(W41、W42方向の動作)。その際図90のように当接動作(W42方向の動作)に入ることで移動部材1452Rの第二力受け面1452Rpと離間制御部材196Rの第一力付与面196Raが接触する。次に離間動作(W41方向の動作)を行うことで図91のように離間制御部材196Rの第二力付与面196Rbが移動部材1452Rの第一力受け面1452Rmに接触し、プロセスカートリッジ1400をV1方向に回動させ、スペーサ1451Rが移動部材1452Rに接触するまで回動する。その状態で離間制御部材196Rがホーム位置まで戻ると図82のようにプロセスカートリッジ1400を離間保持させることが可能となり、前述した実施例と同様な画像プロセス動作が可能となる。
次にトレイ171(不図示)を画像形成可能位置から画像形成装置本体170の外側まで引き出す際のプロセスカートリッジ1400の挙動について説明する。図93のようにプロセスカートリッジ1400を画像形成装置本体170の外側の方向であるX1に引き出すと移動部材1452Rの第一力受け面1452Rmが離間制御部材196Rに接触し、移動部材1452Rは第一押圧面1452Rqが現像カバー部材1428の第一押圧面1428kと当接しており、現像ユニット1409はV1方向へ回転する。トレイ171を引き出す際には、図85の離間状態より更にV1方向へ回転し、図93のような状態になる。つまり、現像ユニット1409は、現像ローラ106が感光ドラム104に対して、図85の状態よりも遠くに離れるように構成されている。このとき移動部材1452Rの第一力受け面1452Rmは離間制御部材196Rの上面196R−2rに接触しながら、プロセスカートリッジ1400が引き出される。このように、プロセスカートリッジ1400を画像形成装置本体170から引き出す際には現像ユニット1409が離間しながら引き出される。トレイ171(不図示)が画像形成装置本体170の外側まで引き出された状態において、プロセスカートリッジ1400は図82に示した離間状態のプロセスカートリッジ1400と同じ状態となる。このように、離間制御部材196Rに接触することで現像ユニット1409がV1方向へ回動しても、プロセスカートリッジ1400は離間状態を維持したままである。
本実施例の説明では駆動側のみを説明した。非駆動側も駆動側と同様の構成・動作のため本実施例では説明を省略する。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。
また本実施例では、移動部材1452R及び第一力受け部(退避力受け部、離間力受け部)を構成する第一力受け面1452Rmと第二力受け部(当接力受け部)を構成する第二力受け面1452Rpをドラムユニットに対して移動可能とした。本実施例においてはこの移動によって、第一力受け面1452Rm及び第二力受け面1452Rpが方向VD1(図40等)、方向VD10(図236等)、方向VD12(図238)、方向VD14(図239)に少なくとも変位する。特に画像形成装置本体170へトレイ171を挿入してプロセスカートリッジ1400を挿入し、離間制御部材196Rの上面196R−qを通過する際は、現像ユニットの当接状態を維持したまま、第一力受け面1452Rm及び第二力受け面1452Rpがこれらの方向へ変位することができる。また画像形成装置本体170からトレイ171を抜き出してプロセスカートリッジ1400を取り出す際は、現像ユニットの離間状態を維持したまま、第一力受け面1452Rm及び第二力受け面1452Rpがこれらの方向へ変位することができる。
これにより、プロセスカートリッジ1400を装置本体170内への挿入又は抜き出す際に、移動部材1452R(特に第一力受け面1452Rm及び第二力受け面1452Rp)と装置本体170、特に離間制御部材196Lとが干渉して挿入又は抜き出しができなくなることを回避するようにした。
次に、図102~図115を用いて、本発明の実施例7について説明する。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。そして、本実施例では、プロセスカートリッジ1600の離間当接機構において押圧部材である移動部材が、画像形成装置本体170の駆動伝達機構によって伝達される駆動力によって収納位置(待機位置)から突出位置(稼働位置)へ移動する構成について主に説明する。
プロセスカートリッジ1600は駆動側に離間当接機構1650R、非駆動側に離間当接機構1650Lを有する。なお離間当接機構について、まず駆動側の離間当接機構150Rの詳細を説明した後、非駆動側の離間当接機構150Lの説明を行う。また、離間当接機構については駆動側、非駆動側でほぼ同一機能を有しているため、駆動側については各部材の符号にRを付する。非駆動側については各部材の符号を駆動側と同一にしてLを付する。
図102は離間当接機構1650Rを含む現像ユニット1609の駆動側の組立斜視図を示す。離間当接機構1650Rは、規制部材であるスペーサ151R、押圧部材である移動部材1652R、引っ張りバネ153を有する。また、図103及び図106に示したように、移動部材1652Rは、実施例1と同様に、第一力受け部(退避力受け部、離間力受け部)1652Rkと第二力受け部(当接力受け部)1652Rnを有する。
移動部材1652Rはラック部1652Rxを有し、現像カバー部材1628の第二支持部1628kの外径と長丸支持受け部1652Raの内壁と篏合し直線移動および回転が可能に支持される(図103参照)。ラック部1652Rxは移動部材駆動ギア1632−15のギア部1632−15bと係合し、移動部材駆動ギア1632−15の回転に連動して移動可能に構成されている。なお、移動部材駆動ギア1632−15は現像駆動入力ギアユニット1632−1の一部として構成されている。現像駆動入力ギアユニット1632−1は、現像カバー部材1628の円筒部1628bの内径と現像カップリングギア1632−11の円筒部1632−11bの外径が嵌合し、加えて駆動側軸受1626の支持部1626aと伝達ギア1632−16の図示しない円筒部が嵌合することで、各種ギアに対して駆動力を伝えるよう構成される。さらに実施例1と同様に、現像カバー部材1628の第一支持部1628cにスペーサ151Rの支持受け部151Raの内径と篏合し、スペーサ151Rを回転可能に支持され、引っ張りバネ153によって移動部材1652Rとスペーサ151Rは互いに引き合うように付勢される。また、駆動側カートリッジカバー部材1616の現像ユニット支持穴1616aに、現像カバー部材1628の円筒部1628bの外径が篏合されることで、揺動軸Kを中心として現像ユニット1609は回動可能に支持されている。
次に図103から図107を用いて本実施例における駆動側の離間当接機構の当接と離間の動作について詳細に説明する。
図103は画像形成装置本体170の図示しないカートリッジトレイにプロセスカートリッジ1600が装着され、カートリッジトレイ1161が第一装着位置に挿入された際の、駆動側カートリッジカバー部材1616と現像カバー部材1628と現像駆動入力ギアユニット1632−1と移動部材1652Rとスペーサ151R以外を省略し、プロセスカートリッジ1600の非駆動側から見た図である。この状態で移動部材1652Rは待機位置にある。この状態から実施例1と同様に画像形成装置本体170の前ドア11が開状態から閉状態に移行するのと連動して、本体側現像駆動カップリング185が移動して現像カップリング(回転駆動力受け部)1632−11と噛み合う。その後、本体の駆動力によって現像カップリング1632−11が回転し、現像駆動入力ギアユニット1632−1が矢印D1方向へ回転させられると、これと連動して移動部材駆動ギア1632−15は矢印D1方向へ回転する。この時、移動部材1652Rのラック部1652Rxは移動部材駆動ギア1632−15のギア部1632−15bと噛み合っているため矢印Z2方向下方へ突出する(図104の状態)。このとき移動部材1652Rは引っ張りバネ153によって矢印Z1方向と略平行に付勢されているためラック部1652Rxの終端部1652Ryと移動部材駆動ギア1632−15のギア部1632−15bは断続的に接触を繰り返すことになるが、後述する現像駆動入力ギアユニット1632−1の内部機構によって、移動部材駆動ギア1632−15は回転が停止し移動部材1652Rは突出位置(稼働位置)で停止する。この動作が完了すると移動部材1652Rは、図104に示すように離間制御部材196Rの第一力付与面196Raと第二力付与面196Rbとの間に突出部1652Rhが進入した突出位置(稼働位置)に位置する。この時、実施例1と同様に、突出部1652Rhと、第一力付与面196Ra及び第二力付与面196Rbとの間には隙間が存在する。このように、本実施例では、現像カップリング1632−11が駆動力を受けることによって、移動部材1652RがZ2方向(所定方向)に移動して待機位置から稼働位置へ移動する。
次に、離間当接機構1650Rによる、感光ドラム104と現像ローラ106が当接する動作および離間する動作について図104~図107を用いて説明する。ただし以降の動作は実施例1に記載の内容と同様であるため、本実施例において生じる実施例1とは異なる動作について説明する。離間当接機構1650Rは、スペーサ151Rと移動部材1652Rと引っ張りばね153によって構成されている。図105に示すように、離間制御部材196Rがホーム位置から第一位置へ移動することで、移動部材1652Rが現像カバー部材1628の第二支持部1628kを中心に矢印BB方向へ回転する。この時、スペーサ151Rも連動して矢印B2方向へ回転することで、現像ユニット1609は当接位置まで移動する。その後、図106に示すように離間制御部材196RがW41方向へ移動しホーム位置へ戻ると、不図示の付勢部材によって移動部材1652Rは矢印BA方向へ回転し、実施例1と同様に離間制御部材196Rから作用されない位置へ移動する。なおこの不図示の付勢部材は、実施例1と同様に引っ張りバネ153を用いても良い。
次に、離間動作のため離間制御部材196RがW41方向へ移動すると、移動部材1652Rは図106の状態からさらに矢印BA方向へ回転し、移動部材1652Rの第一押圧面1652Rqが駆動側軸受1626の第一被押圧面1626cと当接することで、現像ユニット109は当接位置から離間位置へ回転する。この時ラック部1652Rxが移動部材駆動ギア1632−15のギア部1632−15bと接触し噛み合う(図107の状態)。そしてその後、離間制御部材196Rが矢印W42方向に移動して、第二位置からホーム位置に戻ると、スペーサ151Rの離間保持面151Rcと当接面1616cが当接し、現像ローラ106と感光ドラム104が離れた離間状態となる(図104の状態)。
次に図108(a)、図108(b)を用いて、駆動入力ギアユニット1632−1の内部の機構について説明する。駆動入力ギアユニット1632−1は、現像カップリングギア1632−11と、圧縮バネ1632−12と、クラッチ板1632−13と、トルクリミッタ1632−14と、移動部材駆動ギア1632−15と、伝達ギア1632−16から構成される。なお、移動部材駆動ギア1632−15のみ詳細な図としてギアのギア部1632−15bを図示し、それ以外のギアについては歯形状を省略して図示している。現像カップリングギア1632−11は、本体側現像駆動カップリング185と係合するカップリング部(現像カップリング部材)1632−11aと、現像ローラギア131と係合する現像ローラ駆動ギア1632−11cとが前述の円筒部1632−11bを介して配置されている。さらに現像カップリングギア1632−11は、クラッチ板1632−13の複数の第一突出部1632−13aと係合し駆動を伝達するように、カップリング部1632−11aが配置される側と反対側に突出する突出部1632−11dを有する。加えて、伝達ギア1632−16へ駆動力を伝達する駆動軸1632−11eが、突出部1632−11dが突出する方向と同一方向に延出するよう配置され、円筒部1632−11bおよび現像ローラ駆動ギア1632−11cの内部に収納空間1632−11fが形成されている。クラッチ板1632−13は第一突出部1632−11aが配置される側と反対側にフランジ部1632−13bを介して突出する第二突出部1632−13cを有し、トルクリミッタの凹部1632−14aに係合可能に配置されている。トルクリミッタ1632−14は凹部1632−14aが配置される側と反対側に突出する突出部1632−14bが配置され、移動部材駆動ギア1632−15の凹部1632−15aに係合可能に配置されている。クラッチ板1632−13とトルクリミッタ1632−14は常に一体的に回転するよう構成されている。つまりこれらを一体に成形してもよい。伝達ギア1632−16は現像カップリングギア1632−11から延びる駆動軸1632−11eと係合する凹部1632−16aを有し、現像カップリングギア1632−11と常に連動して回転するよう構成されている。さらに、トナー搬送ローラギア133(図102参照)と係合する搬送ローラ駆動ギア1632−16bと、不図示のトナー撹拌ユニットを駆動する撹拌ギアと係合する撹拌駆動ギア1632−16cが配置されている。圧縮バネ1632−12は現像カップリングギア1632−11の収納空間1632−11f内かつクラッチ板1632−13との間に配置され、現像カップリングギア1632−11を矢印Y2方向へ、クラッチ板1632−13を矢印Y1方向へ付勢している。
さらに、前述の移動部材1652Rが突出位置へ移動した際に、突出位置で停止する機構について図109を用いて説明する。図109(a)はカートリッジトレイ1161にプロセスカートリッジ1600が装着され、カートリッジトレイ1161が第一装着位置に挿入された際の駆動入力ギアユニット1632−1の概略断面図である。プロセスカートリッジ1600が第一装着位置に位置する際には、現像カップリングギア1632−11の突出部1632−11dとクラッチ板1632−13の第一突出部1632−13aは、圧縮バネ1632−12の付勢力によって噛合わず、現像カップリングギア1632−11の回転駆動力がクラッチ板へ伝わらない状態となる。一方、伝達ギア1632−16は現像カップリンギア1632−11の連結軸1632−11eと凹部1632−16aで連結し、現像カップリングギア1632−11の回転駆動力が伝達ギア1632−16へ伝わる状態となる。その後、画像形成装置本体170の前ドア11が開状態から閉状態に移行するのと連動して、本体側現像駆動カップリング185が矢印Y1へ移動する。ここで、圧縮バネ1632−12のバネ力を本体側現像駆動カップリング185の押圧力よりも小さく設定しておくことで、現像駆動入力ギア1632−11が矢印Y1方向へ移動する。現像駆動入力ギア1632−11が矢印Y1方向へ移動することで、突出部1632−11dとクラッチ板1632−13の第一突出部1632−13aが噛合い、現像カップリングギア1632−11の回転駆動力がクラッチ板1632−13へ伝わる(図109(b)参照)。クラッチ板1632−13が回転することで、連結されているトルクリミッタ1632−14も回転し、さらにトルクリミッタ1632−14に連結される移動部材駆動ギア1632−15も回転する。前述のように移動部材駆動ギアが回転することで移動部材駆動1652Rが突出位置へ移動する。所定の突出位置に移動すると、移動部材1652Rは引っ張りバネ153によって所定の付勢力FTを受けることになる(図104参照)。ここで、トルクリミッタ1632−14が回転駆動力を伝えずに空転するトルクの設定値を、移動部材1652Rが突出位置にある際に引っ張りバネの付勢力FTによって生じる、駆動入力ギアユニット1632−1中心に発生する負荷トルクと同等に設定する。これによって、移動部材1652Rが移動部材駆動ギア1632−15から駆動力を受け収納位置(待機位置)から突出位置(稼働位置)へ移動すると、トルクリミッタ1632−14が空転することによって、それ以上の駆動力を受けることが無くなり、移動部材1652Rは突出位置で停止することになる。
以上の構成によって、移動部材1652Rのラック部1652Rx終端と移動部材駆動ギア1632−15のギア部1632−15bが断続的に接触することで発生し得る移動部材1652Rの上下運動を抑制することで、移動部材1652Rの突出位置を安定化し加えて騒音も抑制することができる。
次に、移動部材1652Rが突出位置から収納位置へと移動する動作について説明する。図104に示すように、移動部材1652Rが突出位置に位置する状態において、前述の画像形成装置本体170の前ドア11が閉状態から開状態に移行するのと連動して、本体側現像駆動カップリング185が図109の矢印Y2方向へ移動する。これに伴い現像カップリングギア1632−11が、圧縮バネ1632−12の付勢力によって矢印Y2方向へ移動することで、クラッチ板1632−13との噛合いが外れる(図109(a)の状態)。つまり移動部材駆動ギア1632−15は、駆動入力ギアユニット1632−1のその他のギアと一体的に回転しない独立した状態となる。これによって移動部材652Rのラック部1652Rxは、独立した移動部材駆動ギア1632−15と噛み合っているため、引っ張りバネ153の付勢力によって図104矢印Z1方向と略平行に移動可能となる。この動作が完了すると、移動部材1652Rは現像ユニット1609から突出せず、収納された収納位置(待機位置)に位置する(図103の状態)。
なお、本実施例では移動部材1652Rを移動する機構として、現像駆動入力ギアユニット1632−1の内部にトルクリミッタ1632−14を用いる構成としたが、前述の移動部材の上下運動を許容することでコストダウンを図っても良い(図110参照)。図110は現像駆動入力ギアユニット1632−1の各種機能部品を一体的に成型した現像駆動入力ギア1632−2の概略断面図である。前述の図108、図109で説明したカップリング部1632−11a、円筒部1632−11b、現像ローラ駆動ギア1632−11c、移動部材駆動ギア1632−15、搬送ローラ駆動ギア1632−16b、撹拌駆動ギア1632−16cはそれぞれ、カップリング部1632−2a、円筒部1632−2b、現像ローラ駆動ギア1632−2c、移動部材駆動ギア1632−2d、搬送ローラ駆動ギア1632−2e、撹拌駆動ギア1632−2fとして一体化されている。このように構成した場合、現像駆動入力ギア1632−2、本体側現像カップリング185、その他本体側現像カップリング185を駆動する不図示の複数のギアそれぞれにおけるバックラッシによって、移動部材1652Rを収納位置へ移動させるよう構成しても良い。なお前述のトルクリミッタ1632−14を用いた構成においても、バックラッシによって収納位置へ移動させる構成としても良い。
また、本実施例では移動部材1652Rを突出位置と収納位置との間で移動させる機構として、画像形成装置本体170から現像ユニット1609に回転駆動力を伝える駆動軸上(揺動軸Kと同じ)に移動部材1652Rを駆動させる移動部材駆動ギア1632−15を設けたが、これに限るものでは無い。その一例を図111に示す。図111(a)、(b)は移動部材1632R−3が収納位置に位置する際の、駆動側カートリッジカバー部材1616と現像カバー部材1628と現像カップリングギア1632−11と移動部材駆動ギアユニット1652R−3と移動部材1652R−3とスペーサ151R以外を省略し、プロセスカートリッジ1600の非駆動側から見た図である。移動部材駆動ギアユニット1632−3は、第一中間ギア1632−31と第二中間ギア1632−32を介して移動部材駆動ギア1632−33が配置されるよう構成される。なお移動部材駆動ギア1632−33は、移動部材1652R−3のラック部1652Rx−3と係合するよう配置される。以上の構成によって、前述に記載の内容と同様に、現像カップリングギア1632−11が矢印D1方向に回転するのと連動して第一中間ギア1632−31、第二中間ギア1632−32、移動部材駆動ギア1632−33が回転し、移動部材駆動1652R−3を突出位置へと移動させる(図111(b)参照)。また、突出位置から収納位置への移動も前述と同様である。以上説明したように、移動部材を移動させる移動部材駆動ギアは揺動軸K上に配置されていなくても良い。
加えて本実施例では、プロセスカートリッジ1600の駆動側端部から矢印Y1上流方向から下流方向に向かって順に現像ローラ駆動ギア1632−11c(1632−2c)、移動部材駆動ギア1632−15(1632−2d)、搬送ローラ駆動ギア1632−16b(1632−2e)、撹拌駆動ギア1632−16c(1632−2f)を配置したが、各種ギアの配置はこれに限るものではなく、さらにギアの歯数や歯形形状もこれに限るものではない。また、各種ギアは機能を共有してもよく、例えば現像ローラ駆動ギア1632−2cに移動部材駆動ギア1632−2dの機能を有させ、移動部材1652Rのラック部1652Rxを現像ローラ駆動ギア1632−2cと係合させることで、移動部材1652Rを移動させる構成としても良い。
次に、本実施例におけるプロセスカートリッジ1600の非駆動側の離間当接機構1650Lについて図112から図113を用いて説明する。前述の駆動側の離間当接機構1650Rと同様に、離間当接機構1650Lは規制部材であるスペーサ151L、押圧部材である移動部材1652L、引っ張りバネ153を有する(図112参照)。移動部材1652Lはラック部1652Lxを有し、非駆動側軸受1627に直線移動および回転が可能に支持されている。ラック部1652Lxは非駆動側移動部材駆動ギア1635と係合し、非駆動側移動部材駆動ギア1635の回転に連動して移動可能に構成されている。非駆動側移動部材駆動ギア1635は貫通軸1636に連結され(図113参照)、貫通軸1636は不図示の貫通軸ギアを介して現像駆動入力ギアユニット1632−1に連結されている。これによって現像駆動入力ギアユニット1632−1が本体側現像カップリング185から駆動力を受け回転すると、これと連動して貫通軸1636が回転し、非駆動側移動部材駆動ギア1635が回転することで移動部材1652Lが移動する。なお貫通軸1636は、プロセスカートリッジ1600の駆動側と非駆動側との間を連通する軸を有するものであれば、例えばトナー搬送ローラ1016や現像ローラ106を用いてもよく、さらに追加してもよい。
なお、離間当接機構1650Lによる、感光ドラム104と現像ローラ106が当接する動作および離間する動作については、前述の駆動側の離間当接機構1650Rと同様である。
なお本実施例における離間当接機構は、実施例2と同様にプロセスカートリッジ1600の離間当接機構を片側にのみ配置してもよい。図114と図115は、本体側現像カップリング185から回転駆動力を受け、移動部材1652が突出位置へ突出した状態のプロセスカートリッジ1600の斜視図であるが、図114は駆動側のみに離間当接機構1650Rが配置され、図115は非駆動側のみに離間当接機構1650Lが配置されている構成を示している。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。
また、本実施例ではカップリング部(カップリング部材)1632−11aが駆動力を入力されて回転することにより、移動部材1652Rが移動するようにした。そして、この移動部材1652Rの移動によって、第一力受け部(退避力受け部、離間力受け部)1652Rkと第二力受け部(当接力受け部)1652Rnが収納位置(待機位置)と突出位置(稼働位置)との間を移動するようにした。このような構成によって、カップリング部(カップリング部材)1632−11aへの駆動力の入力の有無によって移動部材1652Rの移動を制御することが可能となる。
次に、図116~図128を用いて、実施例8について説明する。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
プロセスカートリッジ1900は駆動側に離間当接機構1950R(図116参照)、非駆動側に離間当接機構1950L(図126参照)を有する。なお離間当接機構について、まず駆動側の離間当接機構1950Rの詳細を説明した後、非駆動側の離間当接機構1950Lの説明を行う。また、離間当接機構については駆動側、非駆動側でほぼ同一機能を有しているため、駆動側については各部材の符号にRを付し、非駆動側については各部材の符号を駆動側と同一にしてLを付する。
なお本実施例は、実施例1における移動部材152Rに相当する移動部材1952Rが、図120に示すようにプロセスカートリッジ1900を画像形成装置本体170に挿抜する過程で離間制御部材196Rに対して長手方向(矢印Y2方向)に回避する構成である。さらに、装着完了時には移動部材1952Rは離間制御部材196Rと同一長手位置にあって、実施例1と同様に当接離間動作が可能となる。移動部材が離間制御部材196Rを回避しながらの挿抜に関しては後述する。
[駆動側プロセスカートリッジ構成]
[駆動側プロセスカートリッジ構成]
図116は、離間当接機構1950Rを含む現像ユニット1909の駆動側の組立斜視図を示す。離間当接機構1950Rは、規制部材(保持部材)であるスペーサ1951R、押圧部材である移動部材1952R、引っ張りバネ1953を有する。本実施例では移動部材1952Rは、第一長丸穴1952Rxと第二長丸穴1952Ry(図117(c)参照)を有し、現像カバー部材1928の第二支持部1928kの外径と第一長丸穴1952Rxおよび第二長丸穴1952Ryの内壁と篏合し、後述する二つの揺動軸に対して揺動可能に支持される。
さらに実施例1と同様に、現像カバー部材1928の第一支持部1928cにスペーサ1951Rの支持受け部1951Raの内径が篏合し、スペーサ1951Rが回動可能に支持され、また引っ張りバネ1953によって移動部材1952Rとスペーサ1951Rは互いに引き合うように付勢される。また、駆動側カートリッジカバー部材1916の現像ユニット支持穴1916aに、現像カバー部材1928の円柱部1928bの外径が篏合されることで、揺動軸Kを中心として現像ユニット1909は回動可能に支持されている。
[移動部材の構成及び動作説明]
[移動部材の構成及び動作説明]
次に、図117から図119を用いて本実施例における駆動側の移動部材1952Rの構成について詳細に説明する。
図117(a)は移動部材1952Rをプロセスカートリッジ1900の長手方向(図116矢印Y1方向へ)から見た単品正面図であり、図117(b)、図117(c)は移動部材1952Rの単品斜視図である。移動部材1952Rは、長丸穴形状の第一長丸穴1952Rx及び第二長丸穴1952Ryを有する。ここで第一長丸穴1952Rx及び第二長丸穴1952Ryの長丸穴形状の長手方向LHは同一であり、上方向(略Z1方向)を矢印LH1、下方向(略Z2方向)を矢印LH2とする。また、LH方向と直交し、かつ第一長丸穴1952Rxを形成する長丸穴の深さ方向(Y1方向)と直交する軸を軸HXRとする。移動部材1952Rは軸HXRを軸とする円柱面1952Rzを有する。なおY1方向は実施例1で説明した現像ローラ106の回転軸線M2や感光ドラム104の回転軸線M1と平行である。なお本実施例では、第一長丸穴1952Rxと第二長丸穴1952Ryは、矢印LH1方向において頂点を同一として配置されている。さらに第一長丸穴1952Rxと第二長丸穴1952Ryは連通しており、第一長丸穴1952Rxの径が第二長丸穴1952Ryに対して大きく設定されている。加えて、第一長丸穴1952Rxの長さは第二長丸穴1952Ryの長さに対して長く設定されている。
さらに移動部材1952Rは実施例1と同様に、第一長丸穴1952Rxの矢印LH2方向下流側に突出部1952Rhが形成されている。突出部1952Rhには、円弧形状を有する第一力受け面1952Rmおよび第二力受け面1952Rpが配置されている。なお、第一力受け面1952Rm、第二力受け面1952Rpは、それぞれ、実施例1と同様に、第一力受け部(退避力受け部、離間力受け部)、第二力受け部(当接力付与部)を構成している。一方、移動部材1952Rは矢印LH1方向下流側に円弧形状の被押込み面1952Rfを有する。また移動部材1952Rは、引っ張りバネ1953を取り付けるばね掛け部1952Rs、第一押圧面1952Rq、第二押圧面1952Rrを実施例1と同様に有する。
図118(a)は現像カバー部材1928のみを、図118(b)は現像カバー部材1928と移動部材1952Rを示した斜視図である。現像カバー部材1928の第二支持部1928kは、第一円柱部1928kbと、球面からなる第二揺動部1928kaと、第一円柱部1928kbよりも径の小さい第二円柱部1928kcとで形成される。ここで第一円柱部1923kb及び第二円柱部1928kcの中心を通る軸をHYRとする。このHYRと直交し第二揺動部1928kaの球面中心を通る軸が前述のHXRと同一である。本実施例では第二揺動部1928kaを球面としたが、後述する移動部材1952Rの矢印YA、YB方向(図119参照)の揺動と、矢印BA、BB方向(図119参照)の揺動を妨げない範囲で設定される面であれば良くこれに限るものではない。加えて、移動部材1952Rの第一長丸穴1952Rxと第二長丸穴1952Ryは、第一円柱部1928kbと第二円柱部1928kcに対して、同様に矢印YA、YB方向と矢印BA、BB方向の揺動を妨げない範囲で設定されれば良く、長丸穴の径やLH方向の位置関係はこれに限るものではない。
図119は現像カバー部材1928に対して、離間当接機構1950Rを組付けた状態を示す。図119(a)はプロセスカートリッジ1900の長手方向(図116矢印Y2方向へ)から見た図である。プロセスカートリッジ1900の長手方向は前実施例で説明した回転軸線M1、M2、Kと平行な方向である。移動部材1952Rは、現像カバー部材1928の第二支持部1928kに支持されることで、実施例1と同様にHYR回りに矢印BA及びBB方向へ揺動可能に支持される。
第二支持部1928kの中心(HYR)を通り前述のLH方向と平行な直線で切り取った断面を、QQ断面として図119(b)に示す。移動部材1952Rは、第二揺動部1928kaと第一長丸穴1952Rxの内壁とが接触した状態で、引っ張りバネ1953によってF1方向に力を受けている。ここで移動部材1952Rのバネ掛け部1952Rsは、第二揺動部1928kaと第一長丸穴1952Rxの接触点よりもY2方向に位置するため、バネ力によって軸HXRを中心とした矢印YA方向のモーメントが発生し軸HXR回りに揺動する。矢印YA方向へ揺動した移動部材1952Rは、現像カバー部材1928の移動部材規制部1928sと接触することで姿勢が決まり、突出部1952RhがY2方向へ突出する。この位置を移動部材1952Rの待機位置とする。
次に図119(b)の状態から被押込み面1952Rfを矢印ZA方向へ押込むと、第二揺動部1928kaと第一長丸穴1952Rxの接触点よりもY2方向に位置するため、軸HXRを中心とした矢印YB方向のモーメントが発生し軸HXR回りに揺動する。図119(c)に示す姿勢まで移動部材1952Rの突出部1952RhはY1方向へ移動する。この位置を移動部材1952Rの稼働位置とする。なお、このZA方向への押込み量は不図示の画像形成装置本体170が有するカートリッジ押圧ユニット191のZA方向の移動量で決まる。
なお、移動部材1952Rが軸HYR及び軸HXRに直交する軸HZR回りに回転することを規制するために、円柱面1952Rzは不図示の駆動側軸受け1926の規制面1926d(図116参照)と接触するよう配置されている。加えて、第二円柱部1928kcと第二長丸穴1952Ryが接触していることも同様の回転規制効果を有する。
以上の構成により、移動部材1952Rは軸HYR及び軸HXR回りの2方向に揺動可能に支持される。
[プロセスカートリッジの画像形成装置本体への装着]
[プロセスカートリッジの画像形成装置本体への装着]
次に図120、図121を用いて、プロセスカートリッジ1900が不図示の画像形成装置本体170に装着される際の、プロセスカートリッジ1900の離間当接機構1950Rと画像形成装置本体170の現像離間制御ユニット195の係合動作について説明する。
図120は、画像形成装置本体170の不図示のカートリッジトレイ171にプロセスカートリッジ1900を装着し、カートリッジトレイ171を第一装着位置へ挿入する際の、プロセスカートリッジ1900とカートリッジ押圧ユニット191と離間制御部材196R以外を省略し、画像形成装置Mの前ドア側から見た図(図120(a))とプロセスカートリッジ1900の駆動側から見た図(図120(b))である。移動部材1952Rの突出部1952Rhは、カートリッジトレイ171を第一装着位置へ挿入する際に、前述の通りYA方向へ揺動した待機位置に位置する。このため離間制御部材196Rに対して矢印Y2方向へ回避した姿勢となることで実施例1と同様に第一装着位置へ挿入することができる。また第一装着位置において移動部材1952Rは、図120(b)に示すようにプロセスカートリッジ1900の駆動側から見た方向で、突出部1952Rhが離間制御部材196Rの空間196Rdに収まるよう配置されている。
実施例1と同様に画像形成装置本体170の前ドア11が開状態から閉状態に移行するのと連動して、カートリッジ押圧ユニット191が矢印ZA方向へ降下し、第一力付与部191aが移動部材1952Rの被押込み面1952Rfと当接する。その後、第二装着位置である所定位置までカートリッジ押圧ユニット191が降下すると、移動部材1952Rの突出部1952Rhが前述の揺動機構によりYB方向に揺動し、稼働位置へ到達する(図121の状態)。この動作が完了すると、実施例1と同様に離間制御部材196Rの第一力付与面196Raと移動部材1952Rの第一力受け面1952Rpが対向し、第二力付与面196Rbと第二力受け面1952Rmが対向する。つまり矢印Y1、Y2方向において、移動部材1952Rの突出部1952Rhと離間制御部材196Rの一部が重なるように配置されている。
なお、プロセスカートリッジ1900を画像形成装置本体170から取り外す際は、上述した装着時の動作と逆の動作となり、移動部材1952Rの突出部1952Rhは稼働位置から待機位置へ移動する。
[現像ユニットの当接離間動作]
[現像ユニットの当接離間動作]
本実施例における当接離間動作は、以下に示すように実施例1と同様である。
図122は現像ユニット1909が離間位置に位置した状態を示す。この状態から離間制御部材196RがW42方向に移動すると、離間制御部材196Rの第二力付与面196Raと移動部材1952Rの第二力受け面1952Rpが当接し、移動部材1952RがHYRを回転中心としてBB方向へ揺動する。さらに移動部材1952Rの回転に伴って、移動部材1952Rの第二押圧面1952Rrがスペーサ1951Rの第二被押圧面1951Reと当接しながら、スペーサ1951RをB2方向へ回転させる。そしてスペーサ1951Rは、不図示の当接面(当接部)1951Rcと被当接面(非当接部)116cとが離れる離間解除位置(第2位置)まで移動部材1952Rによって回転させる。これによって現像ユニット1909が離間位置から現像ローラ9と感光ドラム104が当接する当接位置まで移動することが可能となる(図123の状態)。
その後、離間制御部材196RがW41方向へ移動しホーム位置へ戻る(図124の状態)。
画像形成動作が終了し離間制御部材196RがW41方向へ移動すると、第一力付与面196Rbと第一力受け面1952Rmが当接し、移動部材1952Rの第一押圧面1952Rqが駆動側軸受1926の第一被押圧面1926cと当接することで、現像ユニット109は当接位置から揺動軸Kを中心に矢印V1方向へ回転する(図125の状態)。
その後、離間制御部材196RがW42方向へ移動しホーム位置へ戻ることで、スペーサ1951Rは、離間保持位置(第1位置)に移行する(図122の状態)。
[非駆動側プロセスカートリッジ構成]
[非駆動側プロセスカートリッジ構成]
次に、本実施例におけるプロセスカートリッジ1900の非駆動側の離間当接機構1950Lについて図126を用いて説明する。図126は、離間当接機構1950Lを含む現像ユニット1909の非駆動側の組立斜視図を示す。前述の駆動側の離間当接機構1950Rと同様に、離間当接機構1950Lは規制部材であるスペーサ1951L、押圧部材である移動部材1952L、引っ張りバネ1953を有する。さらに移動部材1952Lは、不図示の第一長丸穴1952Lxと第二長丸穴1952Lyを有し、非駆動側軸受け1927の第二支持部1927eの外径と、第一長丸穴1952Lxおよび第二長丸穴1952Lyの内壁と篏合する。加えて、軸HXRLと軸HYRLの二つの揺動軸に対して揺動可能に支持される。
さらに実施例1と同様に、非駆動側軸受け1927の第一支持部1927bにスペーサ1951Lの支持受け部1951Laの内径が篏合し、スペーサ1951Lが回動可能に支持され、また引っ張りバネ1953によって移動部材1952Rとスペーサ1951Lは互いに引き合うように付勢される。また、非駆動側カートリッジカバー部材1917の現像ユニット支持穴1917aに、非駆動側軸受け1927の円柱部1927aの外径が篏合されることで、揺動軸Kを中心として現像ユニット1909は回動可能に支持されている。
[現像ユニットの当接離間動作]
[現像ユニットの当接離間動作]
離間当接機構1950Lによる、感光ドラム104と現像ローラ106が当接する動作および離間する動作については、前述の駆動側の離間当接機構1950Rと同様である。
なお本実施例における離間当接機構は、実施例2と同様にプロセスカートリッジ1900の離間当接機構を片側にのみ配置してもよい。図127は駆動側のみに離間当接機構1950Rが配置され、図128は非駆動側のみに離間当接機構1950Lが配置される構成を示している。但し、離間量は画像に影響のない範囲で適宜設定する必要がある。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。
また本実施例では、第一力受け部(退避力受け部、離間力受け部)を構成する第一力受け面1952Rmと第二力受け部(当接力受け部)を構成する第二力受け面1952Rpを有する突出部1952RhをYA方向に移動可能とした。本実施例においてはその移動によって、突出部1952Rh及び第一力受け面1952Rmと第二力受け面1952RpはY2方向(実施例1の回転軸線M1及び回転軸線M2に平行な方向)に少なくとも変位する。これにより、プロセスカートリッジ600を装置本体170内への挿入又は抜き出す際に、突出部1952Rh特に第一力受け面1952Rmと第二力受け面1952Rpとが、装置本体170、特に離間制御部材196Rとが干渉して挿入又は抜き出しできなくなることを回避するようにした。
また、本実施例では突出部1952Rhが待機位置から稼働位置へ移動する際に、突出部1952Rhが押圧ユニット191の押圧方向(ZA方向)へ移動する移動量が小さい。このため、突出部1952Rhが待機位置から稼働位置へ移動させるのに必要な押圧ユニット191の移動量を少なく設定することが可能であり、更なる画像形成装置本体170の小型化が実現できる。
以下、本開示の実施例9について図を用いて説明する。本実施例では、前述した実施例1と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
なお、以下の実施形態では画像形成装置に、4個のカートリッジ(以下プロセスカートリッジと称す)が着脱可能な画像形成装置を例示している。なお、画像形成装置に装着するプロセスカートリッジの個数はこれに限定されるものではない。必要に応じて適宜設定されるものである。また、以下説明する実施形態では、画像形成装置の一態様としてレーザービームプリンタを例示している。
[画像形成装置の概略構成]
[画像形成装置の概略構成]
図130は画像形成装置500の断面概略図である。また、図131はプロセスカートリッジPの断面図である。また、図132はプロセスカートリッジPを感光ドラム4の回転軸線の方向(以下長手方向と呼ぶ)の一端側である駆動側からみた分解斜視図である。
この画像形成装置500は、電子写真プロセスを用いた4色フルカラーレーザプリンタであり、記録媒体Sにカラー画像形成を行う。画像形成装置500はプロセスカートリッジ方式であり、プロセスカートリッジを画像形成装置本体502に取り外し可能に装着して、記録媒体Sにカラー画像を形成するものである。
ここで、画像形成装置500に関して、前ドア111を設けた側を正面(前面)、正面と反対側の面を背面(後面)とする。また、画像形成装置500を正面から見て右側を駆動側、左側を非駆動側と称す。また、画像形成装置500を正面から見て上側を上面、下側を下面とする。図130は画像形成装置500を非駆動側から見た断面図であり、紙面手前が画像形成装置500の非駆動側、紙面右側が画像形成装置500の正面、紙面奥側が画像形成装置500の駆動側となる。
画像形成装置本体(装置本体)502には第1のプロセスカートリッジPY、第2のプロセスカートリッジPM、第3のプロセスカートリッジPC、第4のプロセスカートリッジPKの4つのプロセスカートリッジP(PY、PM、PC、PK)が略水平方向に配置されている。
第1~第4の各プロセスカートリッジP(PY、PM、PC、PK)は、それぞれ同様の電子写真プロセス機構を有しており、現像剤(以下トナーと称す)の色が各々異なるものである。第1~第4のプロセスカートリッジP(PY、PM、PC、PK)には画像形成装置本体502の駆動出力部(不図示)から回転駆動力が伝達される。
また、第1~第4の各プロセスカートリッジP(PY、PM、PC、PK)には画像形成装置本体502からバイアス電圧(帯電バイアス電圧、現像バイアス電圧等)が供給される。
図131に示すように、本実施例の第1~第4の各プロセスカートリッジP(PY、PM、PC、PK)は、ドラムユニット(感光体ユニット、第1ユニット)8を有する。ドラムユニット8は、感光ドラム4を回転可能に支持し、この感光ドラム4に作用するプロセス手段としての帯電部材及びクリーニング部材を備える。感光ドラム4は外周面に感光層を備える筒状の感光体である。
また、第1~第4の各プロセスカートリッジP(PY、PM、PC、PK)は、感光ドラム4上の静電潜像を現像する現像部材を備えた現像ユニット(第2ユニット)9を有する。ドラムユニット8と現像ユニット9は互いに結合されている。プロセスカートリッジPのより具体的な構成については後述する。
第1のプロセスカートリッジPYは、現像容器25内にイエロー(Y)のトナーを収容しており、感光ドラム4の表面にイエロー色のトナー像を形成する。第2のプロセスカートリッジPMは、現像容器25内にマゼンタ(M)のトナーを収容しており、感光ドラム4の表面にマゼンタ色のトナー像を形成する。第3のプロセスカートリッジPCは、現像容器25内にシアン(C)のトナーを収容しており、感光ドラム4の表面にシアン色のトナー像を形成する。第4のプロセスカートリッジPKは、現像容器25内にブラック(K)のトナーを収容しており、感光ドラム4の表面にブラック色のトナー像を形成する。
第1~第4のプロセスカートリッジP(PY、PM、PC、PK)の上方には、露光手段としてのレーザスキャナユニット114が設けられている。このレーザスキャナユニット114は、画像情報に対応してレーザ光Uを出力する。そして、レーザ光Uは、プロセスカートリッジPの露光窓10を通過して感光ドラム4の表面を走査露光する。
第1~第4のプロセスカートリッジP(PY、PM、PC、PK)の下方には、転写部材としての中間転写ベルトユニット112を設けている。この中間転写ベルトユニット112は、駆動ローラ112e、ターンローラ112c、テンションローラ112bを有し、可撓性を有する転写ベルト112aを掛け渡している。
第1~第4の各プロセスカートリッジP(PY、PM、PC、PK)の感光ドラム4は、その下面が転写ベルト112aの上面に接している。その接触部が一次転写部である。転写ベルト112aの内側には、感光ドラム4に対向させて一次転写ローラ112dを設けている。ターンローラ112cには転写ベルト112aを介して二次転写ローラ106aを当接させている。転写ベルト112aと二次転写ローラ106aの接触部が二次転写部である。
中間転写ベルトユニット112の下方には、給送ユニット104を設けている。この給送ユニット104は、記録媒体Sを積載して収容した給紙トレイ104a、給紙ローラ104bを有する。
図130における画像形成装置本体502内の左上方には、定着装置107と、排紙装置108を設けている。画像形成装置本体502の上面は排紙トレイ113としている。
記録媒体Sは前記定着装置107に設けられた定着手段によりトナー像が定着され、前記排紙トレイ113へ排出される。
[画像形成動作]
[画像形成動作]
フルカラー画像を形成するための動作は次のとおりである。第1~第4の各プロセスカートリッジP(PY、PM、PC、PK)の感光ドラム4が所定の速度で回転駆動される(図131矢印A方向)。転写ベルト112aも感光ドラムの回転に順方向(図130矢印C方向)に感光ドラム4の速度に対応した速度で回転駆動される。
レーザスキャナユニット114も駆動される。レーザスキャナユニット114の駆動に同期して、各プロセスカートリッジにおいて帯電ローラ5が感光ドラム4の表面を所定の極性、電位に一様に帯電する。レーザスキャナユニット114は各感光ドラム4の表面を各色の画像信号に応じてレーザ光Uで走査露光する。これにより、各感光ドラム4の表面に対応色の画像信号に応じた静電潜像が形成される。形成された静電潜像は、所定の速度で回転駆動(図131矢印D方向)される現像ローラ6により現像される。
前記のような電子写真画像形成プロセス動作により、第1のプロセスカートリッジPYの感光ドラム4にはフルカラー画像のイエロー成分に対応するイエロー色のトナー像が形成される。そして、そのトナー像が転写ベルト112a上に一次転写される。同様に第2のプロセスカートリッジPMの感光ドラム4にはフルカラー画像のマゼンタ成分に対応するマゼンタ色トナー像が形成される。そして、そのトナー像が、転写ベルト112a上にすでに転写されているイエロー色のトナー像に重畳されて一次転写される。同様に第3のプロセスカートリッジPCの感光ドラム4にはフルカラー画像のシアン成分に対応するシアン色トナー像が形成される。そして、そのトナー像が、転写ベルト112a上にすでに転写されているイエロー色、マゼンタ色のトナー像に重畳されて一次転写される。同様に第4のプロセスカートリッジPKの感光ドラム4にはフルカラー画像のブラック成分に対応するブラック色トナー像が形成される。そして、そのトナー像が、転写ベルト112a上にすでに転写されているイエロー色、マゼンタ色、シアン色のトナー像に重畳されて1次転写される。このようにして、転写ベルト112a上にイエロー色、マゼンタ色、シアン色、ブラック色の4色フルカラーの未定着トナー像が形成される。
一方、所定の制御タイミングで記録媒体Sが1枚ずつ分離されて給送される。その記録媒体Sは、所定の制御タイミングで二次転写ローラ106aと転写ベルト112aとの当接部である二次転写部に導入される。これにより、記録媒体Sが前記二次転写部へ搬送されていく過程で、転写ベルト112a上の4色重畳のトナー像が記録媒体Sの面に一括転写される。
[プロセスカートリッジの全体構成]
[プロセスカートリッジの全体構成]
本実施例において、第1から第4のプロセスカートリッジP(PY、PM、PC、PK)は、同等の構造であるが、収容されているトナーの色が異なる。プロセスカートリッジPは、感光ドラム4(4Y、4M、4C、4K)と、感光ドラム4に作用するプロセス手段を備えている。ここで、プロセス手段は感光ドラム4を帯電させる帯電手段、感光ドラム4にトナーを付着させることで感光ドラム4に形成された潜像を現像する現像手段、感光ドラム4の表面に残留する残留トナーを除去するためのクリーニング手段等がある。本実施例において、帯電手段(帯電部材)は帯電ローラ5、現像手段(現像部材)は現像ローラ6、クリーニング手段(清掃部材)はクリーニングブレード7である。そして、プロセスカートリッジPは、ドラムユニット8(8Y、8M、8C、8K)と現像ユニット9(9Y、9M、9C、9K)とに分かれている。現像ローラ6はその表面にトナーを担持する。
[ドラムユニットの構成]
[ドラムユニットの構成]
図131、図132、に示すように、ドラムユニット8は、感光ドラム4、帯電ローラ5、クリーニングブレード7、廃トナー容器15、廃トナー収納部15a、駆動側カートリッジカバー部材520、非駆動側カートリッジカバー部材521で構成される。感光ドラム4は、プロセスカートリッジPの長手方向両端に設けられた駆動側カートリッジカバー部材520、非駆動側カートリッジカバー部材521により軸線(回転軸)M1を中心に回転可能に支持される。また、図132に示すように、感光ドラム4の長手方向の一端側には、感光ドラム4を回転する駆動力が入力される感光体カップリング部材43が設けられている(固定されている)。感光体カップリング部材43は、画像形成装置本体502のドラム駆動出力部としてのカップリング(不図示)と係合し、画像形成装置本体502の駆動モータ(不図示)の駆動力により軸線M1と同軸の回転軸で回転し、駆動力を感光ドラム4に伝達する。帯電ローラ5は、感光ドラム4に対し接触して従動回転できるように、廃トナー容器15に支持されている。また、クリーニングブレード7は、感光ドラム4の周表面に所定の圧力で当接するように、廃トナー容器15に支持されている。クリーニングブレード7により感光ドラム4の周面から除去された転写残トナーは、廃トナー容器15内の廃トナー収納部15aに収納される。ドラムユニット(第1ユニット)8のうち、廃トナー容器15、駆動側カートリッジカバー部材520、非駆動側カートリッジカバー部材521は、ドラム枠体(第1枠体)を構成する。
[現像ユニットの構成]
[現像ユニットの構成]
現像ユニット9は、図131に示すように、現像ローラ(現像部材)6、現像ブレード30、現像容器25、現像カバー部材533、不図示の攪拌部材29a、不図示のトナー搬送ローラ70などで構成されている。現像容器25は、現像ローラ6に供給するトナーを収納するトナー収納部29を内部に備え、現像ローラ6周面のトナーの層厚(トナー層の厚み)を規制する現像ブレード30を支持する。現像ブレード30は厚さ0.1mm程度のシート状金属である弾性部材30bと、弾性部材30bが溶接等で取り付けられたL字断面を有する金属材料であって、現像容器25に支持された支持部材30aを備える。現像ブレード30は、弾性部材130bと現像ローラ106との間に所定の厚みのトナー層を形成する。現像ブレード30は長手方向一端側と他端側の二箇所を、固定ビス30cにて現像容器25に取り付けられる。現像ローラ6は金属材料の芯金6cとゴム部6dから構成されている。現像ローラ6は現像容器25の長手方向両端に取り付けられた駆動側軸受526と非駆動側軸受27によって、軸線(回転軸)M2を中心に回転可能に支持されている。攪拌部材29aは回転することにより、トナー収納部29の中にあるトナーを攪拌する。トナー搬送ローラ(現像剤供給部材)70は、現像ローラ6と接触し、現像ローラ6の表面へトナーを供給しつつ、現像ローラ6の表面からトナーを剥ぎ取りも行う。
また、図132に示すように、現像ユニット9の長手方向の一端側には、現像ローラ6を回転する駆動力が入力される現像カップリング部材74が設けられている。現像カップリング部材74は、画像形成装置本体502の現像駆動出力部としての本体側カップリング部材(不図示)と係合し、画像形成装置本体502の駆動モータ(不図示)の回転駆動力を受けて、軸線M2と実質的に平行な回転軸で回転する。現像カップリング部材74に入力された駆動力は、現像ユニット9内に設けられた不図示の駆動列によって伝達されることで、現像ローラ6を図131の矢印D方向に回転させることが可能である。現像容器25の長手方向一端側には、現像カップリング部材74や不図示のギア列を支持し及び、カバーする現像カバー部材533が取り付けられている。現像ユニット(第2ユニット)9のうち、現像容器25、駆動側軸受526、非駆動側軸受27、及び現像カバー部材533は、現像枠体(第2枠体)を構成する。
[ドラムユニットと現像ユニットの組立]
[ドラムユニットと現像ユニットの組立]
図132を用いて、ドラムユニット8と現像ユニット9の組み付けについて説明する。ドラムユニット8と現像ユニット9は、プロセスカートリッジPの長手方向両端に設けられた駆動側カートリッジカバー部材520と非駆動側カートリッジカバー部材521によって結合される。プロセスカートリッジPの長手方向一端側に設けられた駆動側カートリッジカバー部材520には、現像ユニット9を揺動(移動)可能に支持するための、支持穴520aが設けられている。また、プロセスカートリッジPの長手方向他端側に設けられた非駆動側カートリッジカバー部材521には、現像ユニット9を揺動可能に支持するための、円筒状の支持部521aが設けられている。さらに、駆動側カートリッジカバー部材520と非駆動側カートリッジカバー部材521には、感光ドラム4を回転可能に支持するための支持穴部520b、521bが設けられている。
ここで、一端側では駆動側カートリッジカバー部材520の支持穴520aに現像カバー部材533の円筒部533bの外周面を嵌合させる。他端側では非駆動側カートリッジカバー部材521の支持部521aを、非駆動側軸受27の穴に嵌合させる。さらに、感光ドラム4の長手方向両端を駆動側カートリッジカバー部材520の支持穴520bと非駆動側カートリッジカバー部材521の支持穴部521bに嵌合させる。そして、駆動側カートリッジカバー部材520と非駆動側カートリッジカバー部材521は不図示のビスや接着等により、廃トナー容器15に固定する。つまり、駆動側カートリッジカバー部材520と、非駆動側カートリッジカバー部材521は廃トナー容器15と一体となりドラムユニット8を構成する。
これにより、現像ユニット9は、ドラムユニット8(感光ドラム4)に対して、駆動側カートリッジカバー部材520と非駆動側カートリッジカバー部材521によって移動可能(回転可能)に支持される。ここで、駆動側カートリッジカバー部材520の支持穴520aと非駆動側カートリッジカバー部材521の支持部521aとを結んだ軸線であり、現像ユニット9のドラムユニット8に対する回転中心を、揺動軸(回転軸、回転軸線)Kと称す。また、現像カバー部材533の円筒部533bの中心線は現像カップリング部材74の回転軸線と同軸で、現像ユニット9は揺動軸Kにおいて、現像カップリング部材74を介して画像形成装置本体502から駆動力が入力される構成である。即ち、現像カップリング部材74の回転軸線は回転軸線K(揺動軸K)でもある。プロセスカートリッジPの組み立てが完了した状態で、揺動軸K、軸線M1、軸線M2はそれぞれ互いに実質的に平行な関係となっている。
また、現像ユニット9とドラムユニット8との間には現像ユニット付勢ばね(第2ユニット付勢部材)134が設けられている。この現像ユニット付勢ばね134(図131参照)は、現像ユニット9をドラムユニット8に対して揺動軸Kを中心に矢印V2方向(図129(a)、(b)参照)に回転するように付勢する。現像ユニット付勢ばね134は現像ユニット9を離間位置から現像位置へ向かって移動する方向に付勢している。なお、現像ユニット付勢ばね134はコイルバネであり、弾性部材である。
[プロセスカートリッジ着脱構成]
[プロセスカートリッジ着脱構成]
プロセスカートリッジを支持するカートリッジトレイ(以下トレイと称する)110について、図130、図133および図134を用いて更に詳細に説明する。図133は前ドア111が開いた状態でトレイ110が画像形成装置本体502の内側に位置する画像形成装置500の断面図である。図134は前ドア111が開いた状態でトレイ110が画像形成装置本体502の外側に位置する画像形成装置500の断面図である。図133および図134に示すように、トレイ110は、画像形成装置本体502に対して、矢印X1方向(押し込み方向)および矢印X2方向(引き出し方向)に移動可能である。すなわち、トレイ110は画像形成装置本体502に対して引き出しおよび押し込み可能に設けられ、画像形成装置本体502が水平面上に設置された状態において、トレイ110は略水平方向に移動可能に構成されている。ここで、トレイ110が画像形成装置本体502の外側に位置する状態(図134の状態)を外側位置と称す。また、前ドアが開いた状態でトレイ110が画像形成装置本体502の内側に位置し、感光ドラム4と転写ベルト112aが隙間T1だけ離れた状態(図133の状態)を第一内側位置と称す。
トレイ110は、図134に示す外側位置でプロセスカートリッジPを取り外し可能に装着可能な装着部110aを有する。そして、トレイ110の外側位置で装着部110aに装着された各プロセスカートリッジPは、駆動側カートリッジカバー部材520と、非駆動側カートリッジカバー部材521が接触することでトレイ110に支持される。そして、各プロセスカートリッジPは、装着部110aに配置された状態で、トレイ110が外側位置から第一内側位置への移動とともに画像形成装置本体502の内側に移動する。このとき、図133に示すように、転写ベルト112aと感光ドラム4との間に隙間T1を保った状態で各プロセスカートリッジPは移動する。よって、感光ドラム4が転写ベルト112aと接触することなく、トレイ110はプロセスカートリッジPを画像形成装置本体502の内側に移動させることができる。トレイ110が第一内側位置に位置する状態では、感光ドラム4と転写ベルト112aは隙間T1を保っている。
ここで、図133中矢印X方向(X1、X2)に垂直かつ感光ドラム4の軸線と垂直な方向をZ方向と称す(図133中矢印Z1、Z2)。トレイ110は、第一内側位置から図133中矢印Z2方向に移動して、感光ドラム4と転写ベルト112aが接触し画像形成が可能な第二内側位置(図130の状態)に移動可能である。本実施例は前ドア111が開いた状態から前ドア111を図133中矢印R方向に閉める動作に連動して、第一内側位置に位置するトレイ110が図133中矢印Z2方向に移動して、第ニ内側位置に移動するように構成されている。
以上のように、トレイ110によって、複数のプロセスカートリッジPをまとめて画像形成装置本体502の内側で画像形成が可能な位置に設置させることができる。
[スペーサ]
[スペーサ]
続いて、感光ドラム4と現像ユニット9が有する現像ローラ6の当接と離間を行う構成について図135を用いて詳細を説明する。実施例1においては、スペーサ51R、51Lは、移動部材52R、52Lを介して力を受けることで移動する構成であったが、本実施例の構成は、スペーサが移動部材を介さずに力を受けることが可能な構成である。
図135(a)、図135(b)はスペーサ510の単品斜視図である。スペーサ(スペーサ部)510は感光ドラム4と現像ローラ6との間隔を所定の間隔で保持するための間隔保持部材であり、現像ユニット9のドラムユニット8に対する位置を規制する規制部材である。
スペーサ(保持部材)510は、円環状で現像枠体の支持部533cに当接し、支持される被支持穴(被支持部)510aを有する。そして、被支持穴510aから被支持穴510aの半径方向に突出する突出部(保持部)510bの先端に、被支持穴510aの軸線を中心とする円弧面であり、ドラムユニット8の一部に当接する当接部としての当接面510cを有する。
突出部(保持部)510bは、被支持部510aと当接面510cとを繋ぐ部分であり、ドラムユニット8と現像ユニット9の間に挟まって現像ユニット9が離間位置を維持できるだけの剛性を有している。
さらに、当接面510cと隣り合う被規制面(被規制部)510kを有する。さらに、スペーサ510は、被支持穴510aの半径方向に突出する突出部510dと、突出部510dから被支持穴510aの軸線方向に沿って突出する力受け部(第1の力受け部、当接力受け部、又は被押圧部)510eを有する。さらにスペーサ510は、被支持穴510aと繋がる本体部510fを有し、本体部510fには被支持穴510aの軸線方向に突出するばね掛け部510gと、被支持穴510aの軸線方向と垂直な面である第一被規制面510hが設けられる。
[スペーサ組立]
[スペーサ組立]
次にスペーサ510の組み付けについて図136、図137、図129を用いて説明する。図136は、スペーサ510の組み付け前のプロセスカートリッジPを駆動側から見た斜視図、図137はスペーサ510の組み付け後のプロセスカートリッジPを駆動側から見た斜視図である。図129は、スペーサ510の組み付け後のプロセスカートリッジPを駆動側から揺動軸Kに沿って見た図で、図129(a)は現像ユニット9及び現像枠体が退避位置(離間位置)にある状態を示し、図129(b)は現像ユニット9及び現像枠体が現像位置にある状態を示す。退避位置(離間位置)、現像位置についての詳細な説明は後述する。また、図137、図129は説明のため、駆動側カートリッジカバー部材520の被当接部520cとスペーサ規制面(スペーサ規制部)520d以外を省略して示す。
上述したように、現像ユニット9は、駆動側カートリッジカバー部材520の支持穴部520aに現像カバー部材533の円筒部533bの外径部を嵌合させることで、揺動軸Kを中心に感光ドラム4に対して回転可能に支持される。また、現像カバー部材533は、揺動軸Kに沿って長手方向に突出する円筒状の支持部533cを有する。そして、支持部533cの外周面はスペーサ510の被支持穴510aの内周面と嵌合し、支持部533cはスペーサ510を回転可能に支持する。ここで、現像カバー部材533に組付けられたスペーサ510の揺動軸(回転軸)を揺動軸Hと称す。なお、揺動軸Hは揺動軸Kと実質的に平行である。
さらに、現像カバー部材533は、揺動軸Hに沿って長手方向に突出する抜け止め部533dを有する。抜け止め部533dは、スペーサ510を現像カバー部材533に組付ける際に、支持部533cから離れる方向に弾性変形が可能である。図137に示すように、現像カバー部材533に組付けられたスペーサ510の揺動軸H方向の移動は、抜け止め部533dがスペーサ510と当接することで規制される。また、現像カバー部材533に組付けられたスペーサ510が回転し姿勢を変えても、抜け止め部533dはスペーサ510と当接し、スペーサ510の移動を規制する。
以上のように、スペーサ510は現像ユニット9が有する現像カバー部材533に揺動軸Hを中心に回転可能に支持される。
また、本実施例では、スペーサ510の揺動軸Hを中心に図129中矢印B1方向へ付勢するスペーサ部付勢部(保持部付勢部)を備える付勢部材(保持部付勢部材)として弾性部材である引張りばね530を備えている。引張りばねはコイルバネである。引張りばね530は現像カバー部材533に設けられ揺動軸K方向に突出するばね掛け部533gと、現像カバー部材533に組付けられたスペーサ510のばね掛け部510gに組付けられる。ばね掛け部510gは引張りばね530の作用点に相当し、引張りばね530はばね掛け部510gに図129中矢印F方向の力を加えることで、スペーサ(離間保持部材、保持部材)510を図129中矢印B1方向に付勢する。ここで、図129中矢印F方向は、ばね掛け部533gとばね掛け部510gを結んだ線と略平行方向である。そして、引張りばね530に付勢されるスペーサ510は、図129(a)に示すよう、スペーサ510に設けられた第一被規制面510hが現像カバー部材533に設けられた第一規制面533hと係合する。これにより、スペーサ510の図129中矢印B1方向の移動が規制される。つまり、スペーサ510の現像カバー部材533に対する揺動軸Hを中心とする回転方向(矢印B1方向)の位置が決まる。ここで、第一被規制面510hと第一規制面533hが係合した状態を、スペーサ510の規制位置(第1位置)と称す。
本実施例では、スペーサ510を規制位置(第1位置)に付勢する付勢部材の一例として引張りばね530を上げたが、これに限られるものではない。例えば、ねじりコイルばね、板ばねなどを付勢部材として用いて、スペーサ510を規制位置に付勢してもよい。また、付勢手段の材質は金属やモールドなど、弾性がありスペーサ510を付勢することができればよい。
このように、スペーサ510と引張りばね530を備えた現像ユニット9はドラムユニット8と、上述したように駆動側カートリッジカバー520によって結合される。
図137に示すように、組み付けられたスペーサ510の力受け部510eは現像ローラ6の回転軸線M2の方向に関して、現像カップリング部材74もしくは感光体カップリング部材43の配置された側と同じ側に配置される。
また、図136に示すように、駆動側カートリッジカバー520は被当接部520cを有する。被当接部520cは、支持穴520aの軸線に垂直な2つの面が交わった角部に形成された稜線部であり、支持穴520aの軸線と実質的に平行に延びた稜線部である。被当接部520cとしての稜線部は、支持穴520aの軸線に垂直な2つの面が交わる角部を平面または曲面等で面取りして形成された部分であってもよい。さらに、被当接部520cは、図137、図129に示すように、駆動側カートリッジカバー520が現像ユニット9とドラムユニット8に組付けられた際に、規制位置に位置するスペーサ510の当接面510cと対向し、当接面510cと当接可能に配置される。また、上述したように、現像ユニット9は、ドラムユニット8に対して揺動軸Kを中心に回転可能であり、且つ不図示の現像ユニット付勢ばねによる付勢力を受けている。そして、規制位置に位置するスペーサ510の当接面510cと被当接部520cとが当接すると、現像ユニット9のドラムユニット8に対する揺動軸Kを中心とした回転方向での位置が決まる。そして、このように位置が決まった時、現像ユニット9が有する現像ローラ6と感光ドラム4とは隙間T2だけ離間した状態となる。ここで、このように、スペーサ510によって現像ローラ6が感光ドラム4から隙間T2だけ離間した状態を現像ユニット9の退避位置(離間位置)と称す(図129(a)の状態)。なお、現像ユニット9が退避位置(離間位置)にある時、現像枠体も退避位置(離間位置)にあると言える。
また、現像ユニット9が退避位置にある時、スペーサ510の当接面510cが被当接部520cから受ける力と被支持穴510aの内周面が支持部533cから受ける力は、それぞれ揺動軸H(図129(a)参照)を通るベクトルの力である。更に、これらの力は、互いに逆方向の力であるので、これらの力が釣り合う。このため、現像ユニット9が退避位置にある時、当接面510cが第一非当接部520cから受ける力は、スペーサ510を揺動軸H回りのモーメントを発生させない。なお、被当接部520cは、現像ユニット9が退避位置にある状態において支持穴520aの軸線を中心とする円弧面となるように形成しても良い。このような構成でも、現像ユニット9が退避位置にある時、当接面510cが第一非当接部520cから受ける力は、スペーサ510を揺動軸H回りのモーメントを発生させない。
また、図146の感光ドラム4と現像ローラ6の位置関係を示す図に示すように、現像ユニット9が退避位置に位置する時に、感光ドラム4の軸線M1に対して現像ユニット9の軸線M2が平行でない状態となっても良い。具体的には、例えば、感光ドラム4の軸線M1方向において、現像ローラ6が感光ドラム4から一部が離れるだけでもよい。
以上のように、スペーサ510が規制位置に位置して、現像ユニット9が退避位置に位置する状態において、スペーサ510の力受け部510eに図129(a)中矢印B2方向に力を加えると、スペーサ510は規制位置から図129(a)中矢印B2方向に回転する。スペーサ510が矢印B2方向に回転すると、当接面510cが被当接部520cと離れと、現像ユニット9は退避位置から図129(a)中矢印V2方向に回転可能になる。つまり、退避位置からV2方向に現像ユニット9が回転し、現像ユニット9が有する現像ローラ6が感光ドラム4と当接可能になる。ここで、現像ローラ6と感光ドラム4が当接する現像ユニット9の位置を現像位置(当接位置)と称す(図129(b)の状態)。なお現像ユニット9が現像位置にある時、現像枠体も現像位置(当接位置)にあると言える。
また、スペーサ510が、規制位置から図129(a)中矢印B2方向に回転して当接面510cが被当接部520cと離れ、現像ユニット9が退避位置(離間位置)から現像位置(当接位置)へ移動することを許容する位置を許容位置(第2位置)と称す(図129(b))。現像ユニット9が現像位置に位置するとき、スペーサ510の被規制面510kが駆動側カートリッジカバー520のスペーサ規制面(スペーサ規制部)520dと当接することで、スペーサ510は許容位置(第2位置)に維持される。
また、現像カバー部材533は、円筒部533bの半径方向に突出する退避力受け部(別の力受け部、第2の力受け部、離間力受け部)533aを有する。力受け部510eと同様に、退避用力受け部533aも現像ローラ6の回転軸線方向に関して、現像カップリング部材74もしくは感光体カップリング部材43の配置された側と同じ側に配置される。現像カバー部材533は現像ユニット9に固定されているので、現像ユニット9が現像位置の状態で退避力受け部533aに図129(b)中矢印W51方向に力を加えると、現像ユニット9は揺動軸Kを中心に図129(b)中矢印V1方向に回転し、退避位置に移動する。ここで、図129(a)、(b)中に現像ユニット9が現像位置から退避位置に移動する際に退避力受け部533aが移動する方向を矢印W51で示し、矢印W51の反対方向を矢印W52で示す。これらW51方向、W52方向は略水平方向であり、画像形成装置本体502に装着された第1~第4のプロセスカートリッジPY、PM、PC、PKのうちの少なくとも2つが配列された方向と実質的に平行である。また、W51方向、W52方向は後述する離間制御部材540の移動方向と実質的に平行である。
現像ユニット9に組付けられたスペーサ510が有する力受け部510eは、図129(a)、(b)中のW51方向において、退避力受け部533aの上流側に位置する。さらに、図129(a)、(b)に示すように、駆動側から揺動軸Kに沿って見たときに、力受け部510eと退避力受け部533aは略向かい合っていて、力受け部510eと退避力受け部533aは二点鎖線で囲われた空間Qを形成する。空間QはプロセスカートリッジPが画像形成装置本体502に装着された状態において、重力方向に解放された空間である。また、現像ユニット9が退避位置に位置し、スペーサ510が規制位置に位置する状態(図129(a))と、現像ユニット9が現像位置に位置し、スペーサ510が許容位置に位置する状態(図129(b))の両方状態で空間Qは形成される。
[本体装着]
[本体装着]
次に、図138を用いて、プロセスカートリッジPが画像形成装置本体502に装着される際の動作について説明する。図138(a)は、プロセスカートリッジPが第一内側位置に位置し感光ドラム4と転写ベルト112aが離れた状態を駆動側から見た図である。また、図138(b)はプロセスカートリッジPが第ニ内側位置に位置し感光ドラム4と転写ベルト112aが当接した状態を駆動側から見た図である。図138(a)、(b)は説明のため、駆動側カートリッジカバー520の被当接部520cとスペーサ規制面520d以外を省略して示す。
画像形成装置本体502は、各プロセスカートリッジP(PY、PM、PC、PK)に対応して、離間制御部材(力付与部材)540を有している。離間制御部材540は、第一内側位置、第二内側位置に位置するプロセスカートリッジPのスペーサ510の下(図138中Z1方向)に配置される。離間制御部材540はプロセスカートリッジPに向かって突出する制御部(突出部)540aを有し、制御部540aは第一力付与面(退避力付与部、離間力付与部)540bと第二力付与面(力付与部、当接力付与部)540cを有する。離間制御部材540の制御部540aは、第一内側位置に位置するプロセスカートリッジPが有する空間Qの下面より下(図138中Z1方向)に配置される。さらに、離間制御部材540は、プロセスカートリッジPが第一内側位置に位置するとき(図138(a))、スペーサ510との間に隙間T5が空くように配置される。つまり、上述したように外側位置から第一内側位置に移動するトレイ110によって画像形成装置本体502の内部に挿入されるプロセスカートリッジPのスペーサ510は、離間制御部材540に接触せずに画像形成装置本体502に挿入される。そして、上述したよう前ドア111を閉めることでプロセスカートリッジPが第一内側位置から第二内側位置に移動すると、図138(b)に示すように、空間Qに制御部540aが侵入する。
また、画像形成装置502に設置されたプロセスカートリッジPを図138(b)の矢印J方向から見た図を図142に示す。図142は説明のため、離間制御部材540は、制御部540a以外を省略して示す。また、プロセスカートリッジPを構成する部品の一部を省略して示す。W51方向(退避方向、離間方向)に関して、退避力受け部533aは力受け部510eよりも下流に配置され、W51方向に関して力受け部510eと退避力受け部533aの間に空間Qが形成されている。なお、W51方向については後に詳述する。
図142に示すように、スペーサ510の力受け部510eと現像カバー部材533の退避力受け部533aは現像ユニット9の揺動軸Kに沿った方向において、一部が重なるように配置されて、空間Qを形成する。さらに、プロセスカートリッジPが第二内側位置(画像形成可能位置)に設置され、空間Qに制御部540aが侵入したとき、制御部540aは揺動軸Kに沿った方向において、力受け部510eと退避力受け部533aとに重なるように配置されている。ここで、図138(b)に示すように、プセスカートリッジPが画像形成装置本体502の第二内側位置に装着され、現像ユニット9が退避位置にある状態について説明する。この状態では、力受け部510eと第二力付与面540cとの間に隙間T3があり、退避力受け部533aと第一力付与面540bとの間に隙間T4がある離間制御部材540の位置をホーム位置と称す。
[当接動作]
[当接動作]
続いて、画像形成装置本体502の内部における、現像ユニット9の退避位置(離間位置)から現像位置(当接位置)への移動動作について、図139を用いて説明する。図139は画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー520は、被当接部520cとスペーサ規制面520d以外を省略して示す。そして、図139(a)に、現像ユニット9が退避位置(離間位置)で離間制御部材540がホーム位置の状態を示す。図139(b)に、現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図139(c)に、現像ユニット9が現像位置で離間制御部材540が第一位置に位置する状態を示す。図139(d)に、現像ユニット9が現像位置で離間制御部材540がホーム位置に位置する状態を示す。ここで、前述したように、離間制御部材540のホーム位置において、第二力付与面540cと第二内側位置に装着されたプロセスカートリッジPの力受け部510eとの間に隙間T3があり、第一力付与面540bと退避力受け部533aとの間に隙間T4がある。第一位置については後述する。
現像カップリング部材74は画像形成装置本体502から図139(a)中矢印V2方向に駆動力を受け、現像ローラ6が回転する。つまり、現像カップリング部材74を有する現像ユニット9は、画像形成装置本体502から揺動軸Kを中心に矢印V2方向のモーメントを受けることになる。図139(a)に示す現像ユニット9が退避位置(離間位置)で、スペーサ510が規制位置(第1位置)において、現像ユニット9がこのモーメントを受けても、スペーサ510の当接面510cが被当接部520cに当接し、現像ユニット9の姿勢は退避位置(離間位置)に規制される(退避位置で保持される)。本実施例の離間制御部材540はホーム位置から、図139(a)中矢印W52方向に移動可能に構成されている。離間制御部材540がW52方向に移動すると、制御部540aの第二力付与面(当接力付与部)540cとスペーサ510の力受け部(当接力受け部)510eが当接し、スペーサ510は図139(a)中B2方向に回転する。このように回転するスペーサ510は、当接面510cと被当接部520cとが離れる許容位置(第2位置)まで移動する。ここで、図139(b)に示す、スペーサ510を許容位置まで移動させる離間制御部材540の位置を第一位置と称す。
離間制御部材540によってスペーサ510が許容位置に移動すると、現像ユニット9は画像形成装置本体502から受けるモーメントや現像ユニット付勢ばね134の付勢力によってV2方向に回転し、現像ローラ6と感光ドラム4が当接する現像位置(当接位置)まで移動する(図139(c))。そして、離間制御部材540は、第一位置からW51方向に移動して、ホーム位置に戻る(図139(d))。スペーサ510は、引張りばね530によって図中12(d)中矢印B1方向(許容位置(第2位置)から規制位置(第1位置)に向かう方向)に付勢されている。しかし、スペーサ510の被規制面510kが駆動側カートリッジカバー520のスペーサ規制面520dに当接することで、スペーサ510は規制位置(第1位置)に向かう移動が規制され、許容位置(第2位置)に維持される。
図139(d)に示すように、現像ユニット9が現像位置で、スペーサ510が許容位置の状態で離間制御部材540がホーム位置に戻ったときも、スペーサ510の力受け部(当接力受け部)510eと離間制御部材540の第二力付与面(当接力付与部)540cとの間には隙間T3ができる。同様に、退避力受け部(離間力受け部)533aと第一力付与面(離間力付与部)540bとの間にも隙間T4ができる。つまり、離間制御部材540はプロセスカートリッジPと非接触の状態になり、負荷を受けなくなる。
このように、離間制御部材540がホーム位置から第一位置に移動することで、スペーサ510を規制位置から許容位置に移動し、現像ユニット9が退避位置から現像ローラ9と感光ドラム4が当接する現像位置まで移動する。
なお、力受け部510eは、スペーサ510を規制位置(第1位置)から許容位置(第2位置)へ移動させるための力であって、現像ユニット9及び現像枠体を退避位置(離間位置)から現像位置に移動させるための力(当接力)を離間制御部材540から受けると言える。
現像ユニット9が当接位置(現像位置)にある状態で、現像ユニット9のドラムユニット8に対する位置は、画像形成装置本体502から受ける駆動トルクと現像ユニット付勢ばね134によってV2方向に付勢され、現像ローラ6が感光ドラム4に当接することで決まっている。このため、感光ドラム4は現像位置にある現像ユニット9の現像ローラ6を位置決めする位置決め部(第2位置決め部)と言える。そしてこの時、現像ユニット9はドラムユニット8によって安定的に保持されていると言える。この時、離間解除位置にあるスペーサ151Rは現像ユニット109の位置決めに直接関与はしていない。しかし、スペーサ510は、離間保持位置から離間解除位置へ移動することによって、ドラムユニット8が現像ユニット9を当接位置(現像位置)で安定的に保持できるような状況を作り出していると言える。
[離間動作]
[離間動作]
続いて、現像ユニット9の現像位置から退避位置への移動動作について、図140を用いて説明する。図140は、図139と同様に、画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー520は被当接部520cとスペーサ規制面520d以外を省略して示す。図140(a)に、現像ユニット9が現像位置で離間制御部材540がホーム位置の状態を示す。図140(b)に、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。図140(c)に、現像ユニット9が退避位置の状態を示す。
本実施例の離間制御部材540はホーム位置から図140(a)中矢印W51方向に移動可能に構成されている。離間制御部材540がW51方向に移動すると、第一力付与面540bと現像カバー部材533の退避力受け部(離間力受け部)533aが当接し、退避力受け部533aは少なくともW51方向に移動するので、現像ユニット9は図140中矢印V1方向に回転する。つまり、現像ユニット9は、現像ユニット付勢ばね134の付勢力に抗して、現像位置から退避位置(離間位置)に向かって移動する。このようにW51方向は、現像ユニット9を現像位置から退避位置に向かって移動させるために、退避力受け部533aが第一力付与面540bから力を受けて少なくとも移動する方向であり、退避方向(離間方向)と呼ぶことが可能である。そして、現像ユニット9が図140(a)中矢印V1方向に回転していくと、スペーサ510の被規制面510kと駆動側カートリッジカバー520のスペーサ規制面520dが離れる。このため、スペーサ510は引張りばね530の付勢力によって図140(a)中矢印B1方向(許容位置から規制位置へ向かう方向)に回転する。スペーサ510は、第一被規制面510hが現像カバー部材533の第一規制面533hと当接するまで回転し、規制位置(第1位置)まで移動する。現像ユニット9が離間制御部材540によって現像位置から退避位置に向かう方向に移動し、スペーサ510が規制位置(第1位置)に位置するとき、図140(b)に示すように当接面510cと被当接部520cの間には隙間T5ができる。ここで、図140(b)に示す、現像ユニット9を現像位置から退避位置方向に回転させ、スペーサ510が規制位置に移動可能になる離間制御部材540の位置を第二位置と称す。
さらに、離間制御部材540が第二位置から図140(b)中矢印W52方向に移動して、ホーム位置に戻ると、現像ユニット9は図140中矢印V2方向のモーメントによって図140中矢印V2方向に回転し、当接面510cと被当接部520cが当接する。この時、スペーサ510は引張りばね530の付勢力により規制位置を維持されたままである。このため、現像ユニット9はスペーサ510によって退避位置を規制された状態になり、現像ローラ6と感光ドラム4が隙間T2だけ離間した状態になる(図140(c))。なお、V2方向のモーメントは、現像ユニット付勢ばね134による付勢力、及び現像カップリング部材74が画像形成装置本体502から受ける駆動力により発生するものである。つまり、現像ユニット9は、スペーサ510によって、画像形成装置本体502から受ける駆動力と現像加圧ばね134の付勢による矢印V2方向のモーメント(付勢力)に抗して当接位置へ移動することが規制され、離間位置に維持される。
このように、退避力受け部(離間力受け部)533aは、スペーサ510を許容位置(第2位置)から規制位置(第1位置)へ移動させるための力であって、現像ユニット9及び現像枠体を現像位置から退避位置(離間位置)に移動させるための力(退避力、離間力)を離間制御部材540から受けると言える。
また、図140(c)に示すように現像ユニット9が退避位置で、スペーサ510が規制位置の状態で離間制御部材540がホーム位置に戻った場合、スペーサ510の力受け部(当接力受け部)510eと離間制御部材540の第二力付与面(当接力付与部)540cとの間には隙間T3ができる。同様に、退避力受け部(離間力受け部)533aと第一力付与面(離間力付与部)540bとの間に隙間T4ができる。つまり、離間制御部材540はプロセスカートリッジPと非接触の状態になり、負荷を受けなくなる。
以上のように本実施構成では、離間制御部材540がホーム位置から第二位置に移動することで、スペーサ510が許容位置から規制位置に移動する。そして、離間制御部材540が第二位置からホーム位置に戻ることで、現像ユニット9がスペーサ510によって退避位置を維持する状態になる。つまり、本実施例では、退避力受け部(離間力受け部)533aと第一力付与面(離間力付与部)540bとが離間している状態であっても、スペーサ510が規制位置にあり、当接面510cと被当接部520cとが当接している。このため、現像ユニット9が現像位置へ移動することを規制して退避位置(離間位置)に維持することが可能である。
上述した当接動作及び離間動作を行うために、現像ユニット9が離間位置にある時の、W51方向又はW52方向に関する、力受け部510eと退避力受け部533aの間の幅は3.5mm以上、18.5mm以下であることが望ましく、より望ましくは10mm以下である。このような寸法関係にすることで適切な当接動作及び離間動作を行うことが可能となる。
現像ユニット9が離間位置(退避位置)にある状態で、現像ユニット9のドラムユニット8に対する位置は、画像形成装置本体502から受ける駆動トルクと現像ユニット付勢ばね134によってV2方向に付勢され、上述したように被支持部510aが支持部533cと接触し、当接部510cが被当接部520cと接触することで決まっている。このため、被当接部520cは感光ドラム4が離間位置(退避位置)にある現像ユニット9を位置決めする位置決め部(第1位置決め部)と言える。そしてこの時、現像ユニット9はドラムユニット8によって安定的に保持されていると言える。また、規制位置(第1位置)にあるスペーサ510は、ドラムユニット8が現像ユニット9を離間位置(退避位置)で安定的に保持できるような状況を作り出していると言える。
本実施構成では、離間制御部材540をホーム位置、第一位置、第二位置の間を一方向(W51、W52)に移動させることで、現像ローラ6と感光ドラム4の当接状態と離間状態を制御することができる。よって、画像形成を行うときのみ現像ローラ6を感光ドラム4に当接させ、画像形成を行わないときは現像ローラ6を感光ドラム4から離間させた状態を維持できる。このため、画像形成を行わない状態で長期間放置されても、現像ローラ6と感光ドラム4が変形することがなく、安定した画像形成を行うことができる。
また、プロセスカートリッジPにおいては、感光ドラム4の回転軸線M1又は現像ローラ6の回転軸線M2に沿って見た時に、退避力受け部(離間力受け部)533aと力受け部(当接力受け部)510eが互いに対向し、間に空間が形成されるよう配置した。つまり、W51方向(又はW52方向)に関して、退避力受け部(離間力受け部)533aと力受け部(当接力受け部)510eとの間に隙間が形成されるように配置した。更に、現像ユニット9が現像位置にある時も退避位置にある時のいずれにおいても、感光ドラム4の回転軸線M1又は現像ローラ6の回転軸線M2に沿って見た時に、退避力受け部(離間力受け部)533aの方が力受け部(当接力受け部)510eよりも感光ドラム4の回転軸線M1に近くなるように配置した。
このような配置によって、離間制御部材540においては、第一力付与面(離間力付与部)540bと第二力付与面(当接力付与部)540cをプロセスカートリッジPに向かって突出する1つの突出部である制御部540a一か所に設けることができる。このため、第一力付与面540bと第二力付与面540cがプロセスカートリッジPに作用する際に必要な剛性を、制御部540a一か所に持たせることができ、離間制御部材540全体又は制御部540aを小型化することができる。これにより、装置本体502を小型化できる。また、離間制御部材540自体の体積を減らすことによりコストダウンすることができる。
また、離間制御部材540がホーム位置にいる場合、制御部540aにはプロセスカートリッジPから負荷がかからないため、離間制御部材540や離間制御部材540を動作させる機構に必要な剛性を小さくすることができ、小型化することができる。また、離間制御部材540を動作させる機構の摺動部への負荷も小さくなるため、摺動部の摩耗や異音の発生を抑制することできる。
また、制御部540aの第一力付与面540bが、現像ユニット9に固定される現像カb−部材533の退避力受け部533aを直接押圧することで、現像ユニット9を現像位置から退避位置に移動させる。このため、現像ユニット9を現像位置から退避位置に移動させる際の摺動摩擦を極力小さくすることができ、制御部540aにかかる負荷をより小さくすることができる。
また従来、現像ユニットは、現像ユニットと装置本体の離間制御部材との当接によって退避位置に位置決めされる構成であり、現像ユニットと離間制御部材との間に部品公差等による位置誤差に起因する退避位置の位置誤差が発生する。そして、退避位置の位置誤差は現像ローラと感光ドラムとの離間量のばらつきを生じる。このような現像ユニットの退避位置の位置誤差を見越して、位置誤差が生じても現像ローラと感光ドラムとが十分に離間できるよう、離間量を設計する必要があった。また、退避位置にある現像ユニットと他の部材との間の隙間等についても、上記退避位置の位置誤差を見越して、その隙間等を大きく設計する必要があった。
一方で、本実施例では、現像ユニット9の退避位置は、スペーサ510によって位置決めされ、離間制御部材540と現像ユニット9との間の位置誤差は影響しない。このため、現像ユニット9の退避位置での位置誤差が小さくなるので、その分、現像ローラ6と感光ドラム4との間の離間量のばらつきも小さくなり、離間量をより小さく設計することができる。離間量が小さくできるので、現像ユニット9の現像位置から退避位置への移動量も小さくなり、プロセスカートリッジを小型化することができる。また、本体内でプロセスカートリッジPを配置するためのスペースを小さくすることができ画像形成装置の小型化ができる。もしくは、現像ユニット9の現像剤収容部29のスペースを大きくすることができ大容量のプロセスカートリッジPを画像形成装置本体502に配置することができる。また、退避位置にある現像ユニット9と他の部材(例えばドラムユニット8)との間の隙間等についても、上記退避位置の位置誤差が小さくなった分、その隙間等を小さく設計することができる。
また、スペーサ510を現像カップリング74と現像ローラ6の回転軸線方向に関して同じ側に配置している。これにより、現像ユニット9が退避位置に規制される際に、現像カップリング74が駆動力を伝達された際に画像形成装置本体502から受けるモーメントによって現像ユニット9が変形する量を小さくすることができる。
また、スペーサ510の力受け部510eを感光体カップリング部材43と現像ローラ6の回転軸線方向に関して同じ側に配置している。これにより、回転する感光ドラム4に対して、スペーサ510を規制位置から許容位置に移動させ現像ローラ6を感光ドラム4に当接させるタイミングをより精度よく行うことができる。
本実施例では、スペーサ510を許容位置から規制位置に移動させる手段として、引張りばね530の付勢力を用いたが、本開示はそれ限られるものではない。別実施形態では、図144に示すように、スペーサ510を許容位置から規制位置に向かって付勢するばね530は存在しない。この形態においては、スペーサ710は、その自重による回転でスペーサを許容位置から規制位置に移動する。図144のスペーサ710は、現像ユニット9を現像位置から退避位置に移動させると、自重により図144(a)B1方向に回転し、許容位置から規制位置へ移動する。
[配置詳細−その1]
[配置詳細−その1]
続いて、スペーサ510の配置についての図141を用いて詳細に説明する。図141は、プロセスカートリッジPを感光ドラム4の回転軸線の方向に沿って駆動側から見た図である。現像ユニット9は退避位置に、スペーサ510は規制位置に位置している。また、説明のために、駆動側カートリッジカバー520は被当接部520cとスペーサ規制面520d以外を省略して示す。
図141に示すように、感光ドラム4の回転軸線(回転中心)をM1とし、現像ローラ6の回転軸線(回転中心)をM2とし、感光ドラム4の回転軸線M1と現像カップリング部材74の回転軸線(回転中心)Kを結ぶ直線を線N1とする。なお、本実施例においては感光体カップリング部材43の回転軸線は回転軸線M1と同軸である。線N1を境に領域を分けた場合、現像ローラ6の回転軸線M2と力受け部510eは、線N1を境に同じ領域に配置される。また、現像カップリング部材74の回転軸線Kと現像ローラ6の回転軸線M2の距離を距離e1とし、現像カップリング部材74の回転軸線Kと力受け部510eまで距離を距離e2とする。この場合、距離e2が距離e1よりも大きくなるように力受け部510eが配置される。
このように力受け部510eを配置することで、力受け部510eが画像形成装置本体502から受けるスペーサ510を規制位置から許容位置に移動させるための力を、現像ローラ6が感光ドラム4に当接させるための力に変換することができる。つまり、スペーサ510を規制位置から許容位置に移動させた際に、より早く現像ローラ6を感光ドラム4に当接させることができるため、回転する感光ドラム4に対してより高精度に現像ローラ6が当接するタイミングを制御することができる。
[配置詳細−その2]
[配置詳細−その2]
続いて、スペーサ510の配置についての図143を用いて詳細に説明する。図143は、プロセスカートリッジPを感光ドラム4の回転軸線M1又は現像ローラの回転軸線M2の方向に沿って駆動側から見た図である。現像ユニット9は現像位置に、スペーサ510は許容位置に位置している。また、説明のために、駆動側カートリッジカバー520は被当接部520cとスペーサ規制面520d以外を省略して示す。
図143に示すように、感光ドラム4の回転軸線M1と現像ローラ6の回転軸線をM2とを結ぶ直線を線N2とする。線N2を境に領域を分けた場合(上側を領域AU1、下側を領域AD1とする)、力受け部510eの少なくとも一部及び退避力受け部533aの少なくとも一部は、線N2を境に現像カップリング部材74の回転軸線Kと反対の領域AD1に配置される。つまり、力受け部510eの少なくとも一部及び退避力受け部533aの少なくとも一部は、現像カップリング部材74の回転中心Kが配置された領域AU1と反対側の領域AD1に配置されている。実施例1で説明したように、領域AU1には現像ユニット9をドラムユニット8に対して移動可能に支持するための構造物や現像ユニット9が備える部材を駆動するための駆動部材が配置されている。このため、領域AU1よりも領域AD1に力受け部510eの少なくとも一部及び退避力受け部533aの少なくとも一部を配置する方が、部材同士の干渉を避けた効率的なレイアウトとすることができる。これによってプロセスカートリッジ100、画像形成装置Mの小型化に繋がる。
さらに、線N2に直交し、現像ローラ6と感光ドラム4との接触点を通る線を線N3とする。線N3を境に領域を分けた場合、力受け部510eの少なくとも一部及び退避力受け部533aの少なくとも一部は、線N3を境に感光ドラム4の回転軸線M1と反対の領域に配置される。
なお、上記説明において領域AU1、領域AD1は、回転軸線M2に沿う方向から見て、直線N2で境界を分けた時に、回転軸線K又は現像カップリング32が配置された領域、配置されていない領域として定義した。しかし、他の定義として、領域AU1、領域AD1は、回転軸線M2に沿う方向から見て、直線N2で境界を分けた時に、帯電ローラ5又は帯電ローラ5の回転軸線M5が、配置された領域と配置されていない領域として定義しても良い。
更に他の定義として、領域AU1、領域AD1は、回転軸線M2に沿う方向から見て、直線N2で境界を分けた時に、現像ブレード30や近接点30d(図240参照)、攪拌部材29a(図240参照)の回転軸線M7(図240参照)が、配置された領域と配置されていない領域として定義しても良い。近接点30dは現像ブレード30の現像ローラ6の表面に最も近接した位置とする。
一般的な電子写真用カートリッジ、特にインラインレイアウトの画像形成装置に用いられるカートリッジにおいては、領域AD1にはカートリッジの他の部材が比較的配置されにくい。また、領域AD1に力受け部510e及び退避力受け部533aを配置すると、装置本体502においても次に示すようなメリットがある。つまり、装置本体502の離間制御部材540を、カートリッジPの下側に配置し、略水平方向(本実施例ではW51、W52方向であり、感光ドラム4又はカートリッジPの配列方向)に移動させて力受け部510e及び退避力受け部533aを押圧する。このような構成により、離間制御部材540及びその駆動機構を比較的簡易な構成又は小型な構成にすることができる。これは特にインラインレイアウトの画像形成装置では顕著である。このように、領域AD1に力受け部510e及び退避力受け部533aを配置することが、装置本体502の小型化やコストダウン等へ寄与することも期待できる。
以上の力受け部510e及び退避力受け部533aの配置については、当接状態のカートリッジPを示す図143を用いて説明したが、当接状態のカートリッジPにおいても同様の関係となっていることは他の図からも明らかである。図オは当接状態のカートリッジPを示した図であるが、力受け部510e及び退避力受け部533aの配置は上述のものと同様である。
また、直線N2と直交する方向をVD1方向とすると、移動部材152Rが稼働位置にある時、力受け部510eが設けられた突出部510d及び突出部形状の退避力受け部533aは、現像ユニット9から少なくともVD1方向に突出した位置に配置される。このため、離間制御部材540の第一力付与面540bを退避力受け部533aに、第二力付与面540cを力受け部510eにそれぞれ当接可能に力受け部510eと退避力受け部533aを配置することができる。非駆動側の構成についても同様である。
また、本構成の現像ローラ6の直径は感光ドラム4の直径よりも小さくなっている。このように力受け部510eを配置することで、現像カップリング部材74から現像ローラ6に駆動力を伝達するためのギア列等で構成される駆動伝達部(不図示)と感光ドラム4を避けて省スペースに配置することができる。こにより、プロセスカートリッジPを小型化することができる。
図139(b)に示す当接動作において、力受け部510eは、線N3を境に感光ドラム4の回転軸線M1と反対の領域で、離間制御部材540の第二力付与面540cから力(外力)を受けている。そして、力受け部510eが第二力付与面540cから受ける力の方向(W52方向)は、現像ユニット9が退避位置から現像位置へと移動する方向である。このため、力受け部510eが第二力付与面540cから受ける力によって、現像ユニット9を退避位置から現像位置へより確実に移動させることができる。
[配置詳細−その3]
[配置詳細−その3]
上述したような、力受け部510e、退避力受け部533aのそれぞれの少なくとも一部を領域AD1へ配置するという概念に類似の概念について、図240、図241を用いて説明する。
図240、図241は、プロセスカートリッジPを現像ユニット9の回転軸線M1、回転軸線K又は回転軸線M2に沿って駆動側から見た図であり、図240は離間状態、図241は当接状態を示す。尚、以降に説明するスペーサ510の配置に関しては、当接状態と離間状態でもほぼ同じであるので、説明は図240を用いて離間状態についてのみ説明し、当接状態における説明は省略する。
トナー搬送ローラ(現像剤供給部材)107の回転軸線を回転軸線(回転中心)M6とする。また、プロセスカートリッジ100は、現像ユニット109に収容する現像剤を回転して攪拌する攪拌部材108を有し、その回転軸線を回転軸線(回転中心)M7とする。
図236において、回転軸線M5と回転軸線M5を結ぶ直線N10と感光ドラム104の表面との交点のうち回転軸線M5から遠い方の交点を交点MX1とする。交点MX1を通る感光ドラム104の表面への接線を接線(所定接線)N11とする。接線N11を境に領域を分けて、回転軸線M1、帯電ローラ105、回転軸線M5、現像カップリング部132a、回転軸線K、現像ブレード130、近接点130d、トナー搬送ローラ107、回転軸線M6、攪拌部材129a、回転軸線M7、又は被押込み面152Rfが、配置された領域を領域AU2、配置されていない領域を領域(所定領域)AD2とする。また、領域AU2、AD2は次のような別の言い方で定義しても良い。即ち、回転軸線M5から回転軸線M1に向かう方向と平行で且つ同じ向きを向く方向を方向VD10とすると、方向VD10に関して感光ドラム104の最下流部が交点MX1である。そして、方向VD10に関して、最下流部MX1よりも上流側の領域を領域AU2、下流側の領域を領域(所定領域)AD2とする。いずれの表現であっても定義される領域AU2、AD2は同じである。
そして、各力受け部152Rk、152Rnの少なくとも一部は領域AD2に配置されている。このように、領域AD2に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置することは、プロセスカートリッジ100や装置本体170の小型化やコストダウン等へ寄与することも期待できる。これは、領域AD1に各力受け部152Rk、152Rnのそれぞれの少なくとも一部を配置する場合と同様の理由からである。非駆動側の構成についても同様である。
また、移動部材152R及び各力受け部152Rk、152Rnは、ZA方向及びその逆方向の移動によって、少なくともVD10方向に関して変位する。このようなVD10方向に関する変位によって、プロセスカートリッジ100を装置本体170に挿入又は装置本体170から取り外しする際に、移動部材152R及び各力受け部152Rk、152Rnが離間制御部材196Rと干渉して挿入又は取り外しができなくなることを回避することができる。非駆動側の構成についても同様である。
また、直線N11と直交する方向をVD10方向とすると、移動部材152Rが稼働位置にある時、力受け部510eが設けられた突出部510d及び突出部形状の退避力受け部533aは、現像ユニット9から少なくともVD10方向に突出した位置に配置される。このため、離間制御部材540の第一力付与面540bを退避力受け部533aに、第二力付与面540cを力受け部510eにそれぞれ当接可能に力受け部510eと退避力受け部533aを配置することができる。非駆動側の構成についても同様である。
以上で説明した各力受け部の配置関係は、以降で説明する全ての実施例においても同様の関係となっている。
<実施例9の別形態1>
<実施例9の別形態1>
なお、本実施例ではスペーサ510を現像ユニット9で支持したが、本開示はそれに限るものではない。別形態1として、図145に示すように、ドラムユニット8の駆動側カートリッジカバー部材920にボス(支持部)920aを設け、スペーサ910の穴(被支持部)に挿入することで、スペーサ910を支持してもよい。この形態では、スペーサ910は規制位置(第1位置)にある時、スペーサ910の当接部910cが現像ユニット(第2ユニット)9の現像枠体(第2枠体)に設けられた不図示の被当接部に当接可能である。当接部910cと不図示の被当接部とが当接している時、現像ローラ6と感光ドラム4とは隙間T2だけ離間した状態(現像ユニット9が退避位置にある状態)で現像ユニット9の姿勢で位置決めされる。現像ユニット9が退避位置(離間位置)にある状態から、離間制御部材540がW52方向に移動すると、制御部540aの第二力付与面540cとスペーサ910の力受け部910eが当接し、スペーサ510は図145の矢印B2方向に回転する。このように回転するスペーサ910は、当接面910cと現像ユニット9の不図示の被当接部とが離れる許容位置(第2位置)まで移動する。離間制御部材540によってスペーサ910が許容位置に移動すると、現像ユニット9は画像形成装置本体502から受けるモーメントや現像ユニット付勢バネ134の付勢力によって回転し、現像ローラ6と感光ドラム4が当接する現像位置(当接位置)まで移動する。
また、別形態1における現像ユニット9は、先に図129等に示した実施例1の退避力受け部533aと同じ位置に同形状の退避力受け部533aを有しているなど、スペーサ910とそれに接触する部分の構成以外は、先に図129等に示した実施例1の構成と同じである。
従って、別形態1においても、感光ドラム4の回転軸線M1と現像ローラ6の回転軸線をM2とを結ぶ直線を線N2とする。線N2を境に領域を分けた場合、力受け部910eの少なくとも一部及び退避力受け部533aの少なくとも一部は、線N2を境に現像カップリング部材74の回転軸線Kと反対の領域に配置される。さらに、線N2に直交し、現像ローラ6と感光ドラム4との接触点を通る線を線N3とする。線N3を境に領域を分けた場合、力受け部910eの少なくとも一部及び退避力受け部533aの少なくとも一部は、線N3を境に感光ドラム4の回転軸線M1と反対の領域に配置される。
<実施例9の別形態2>
<実施例9の別形態2>
実施例9では、現像ユニット9の揺動軸と現像カップリング部材74の回転軸線Kを同軸上に配置したが、これに限られるものではない。別形態2として、図147に示すように、現像カバー部材1333に被支持穴1333fと、ドラム枠体1315に支持部1315bを設け、支持部1315bを回転中心として、現像ユニット9をドラムユニットに対して回転移動させてもよい。現像カップリング部材74の本体側カップリング部材(不図示)と係合する係合部74aとする。この形態においては、係合部74aが、現像ユニット9の他の部分(特に駆動伝達経路で下流側に配置された部分)に対して、支持部1315bを中心とする円の円周方向に軸ずれ可能とする軸ずれ機構(オルダム継手機構)を有している。これによって現像ユニット9が退避位置にある時と現像位置にある時とのいずれにおいても、現像カップリング部材74と本体側カップリング部材との係合を維持することができる。
また、上述した軸ずれ機構(オルダム継手機構)の代わりに、現像カップリング部材74の係合部74aが本体側カップリング部材に対する軸ずれを許容しつつ、軸ずれが解消された時(同軸になった時)に、駆動力が伝達されるような形状であってよい。もしくは、係合部74aが本体側カップリング部材に対して軸ずれした際に、係合部74aと本体側カップリング部材の少なくとも一方が他方に対して軸線方向で退避し、軸ずれが解消された時(同軸になった時)に退避が解除されるような機構を設けても良い。
<実施例9の別形態3>
<実施例9の別形態3>
前述した実施例9では、現像ユニット9はドラムユニット8に対して揺動軸K回りに揺動して現像位置(当接位置)と退避位置(離間位置)との間を移動する構成であった。しかし、現像ユニット9の現像位置と退避位置との間を移動は、ドラムユニット8に対する揺動又は回転に限られない。つまり、前述の実施例9において、現像ユニット9がドラムユニット8に対して所定の方向に移動する(例えば直線移動)ことで、現像位置と退避位置との間を移動する構成に変更したものを別形態3とする。具体的には図148に示すように、駆動側カートリッジカバー部材1320の支持穴1320aを長手方向がX1方向(又はX2方向)である長穴形状にし、現像ユニット9を図33中矢印X1、X2方向に平行移動させることで現像位置(当接位置)と退避位置(離間)を移動させてもよい。本別形態においても、実施例9の別形態2と同様に、係合部74aが、現像ユニット9の他の部分(特に駆動伝達経路で下流側に配置された部分)に対して、X2方向(及び又はX1方向)に軸ずれ可能とする軸ずれ機構(オルダム継手機構)を有している。
また、上述した軸ずれ機構(オルダム継手機構)の代わりに、現像カップリング部材74の係合部74aが本体側カップリング部材に対する軸ずれを許容しつつ、軸ずれが解消された時(同軸になった時)に、駆動力が伝達されるような形状であってよい。もしくは、係合部74aが本体側カップリング部材に対して軸ずれした際に、係合部74aと本体側カップリング部材の少なくとも一方が他方に対して軸線方向で退避し、軸ずれが解消された時(同軸になった時)に退避が解除されるような機構を設けても良い。
本開示の実施例10に係るプロセスカートリッジ、画像形成装置について、図149を用いて説明する。実施例9と同様の機能又は構成を有する部材には同一の符号を付け、詳細な説明は省略する。本実施例のプロセスカートリッジはスペーサとその周辺の構成のみ実施例9と異なり、他の部分は同じである。また、画像形成装置も実施例9と同じである。
本実施例ではスペーサ610が実施例9と同様現像カバー部材533に支持されている。一方で、スペーサ610は、力受け部(当接力受け部)610eだけでなく、第一力付与面540bから力を受ける別の力受け部としての退避力受け部(離間力受け部)610mを備える。図149は、画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー520は被当接部520cとスペーサ規制面520d以外を省略して示す。図149(a)に、現像ユニット9が現像位置で離間制御部材540がホーム位置の状態を示す。図149(b)に、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。図149(c)に、現像ユニット9が退避位置の状態を示す。
離間制御部材540はホーム位置から図149(a)中矢印W51方向に移動可能に構成されている。離間制御部材540がW51方向に移動すると、第一力付与面540bとスペーサ610の退避力受け部610mが当接し、スペーサ610が図149(a)中矢印B1方向に回転する。この回転の際、スペーサ610はスペーサ規制面520d又は被当接部520cと当接したままである。このため、スペーサ610の回転に伴って、スペーサ610のスペーサ規制面520d又は被当接部520cとの当接部とスペーサ610の揺動軸Hとの距離が長くなっていく。このため、現像ユニット9は図149中矢印V1方向に回転し、現像ユニット9は現像位置から退避位置に向かって移動していく。更に、現像ユニット9が図149(a)中矢印V1方向に回転していくと、スペーサ610は、駆動側カートリッジカバー520のスペーサ規制面520d及び被当接部520cから離れ、更にスペーサ610は図149(a)中矢印B1方向に回転する。スペーサ610は、第一被規制面610hが現像カバー部材533の第一規制面533hと当接するまで回転し、規制位置まで到達する。スペーサ610が規制位置に到達した後は、第一被規制面610hが第一規制面533hを押圧することで、現像ユニット9は図149中矢印V1方向に回転する。そして、離間制御部材540が第二位置まで移動した後、図149(b)中矢印W52方向に移動してホーム位置に戻ると、現像ユニット9は規制位置に位置するスペーサ610によって、実施例9と同様に離間位置を維持する。
また、実施例9と同様に、感光ドラム4の回転軸線M1と現像ローラ6の回転軸線をM2とを結ぶ直線を線N2とする。線N2を境に領域を分けた場合、力受け部610eの少なくとも一部及び退避力受け部610mの少なくとも一部は、線N2を境に現像カップリング部材74の回転軸線Kと反対の領域に配置される。さらに、線N2に直交し、現像ローラ6と感光ドラム4との接触点を通る線を線N3とする。線N3を境に領域を分けた場合、力受け部610eの少なくとも一部及び退避力受け部610mの少なくとも一部は、線N3を境に感光ドラム4の回転軸線M1と反対の領域に配置される。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、本実施例は力受け部610eと退避力受け部610mが一体のスペーサ610のため、力受け部610eと退避力受け部610mとの間隔をより精度よく配置することができる。このため、現像ユニット9の現像位置と退避位置の切り替えタイミングを精度よくすることができる。
また、本実施例では退避力受け部610mが第一力付与面540bから矢印B1方向に回転するための力を受けることでスペーサ610を許容位置から規制位置に移動させることができるため、実施例9で用いた引張りばね530を設けていない。このため、本実施例の構成は、実施例9と比べ構成を引張りばね530が無い分だけプロセスカートリッジを低コスト化又は小型化することができる。しかしながら、引張りばね530の同様に、スペーサ610を矢印B1方向に回転するよう付勢する現像枠体付勢部材として弾性部材であるばねを設けても良い。
本開示の実施例11に係るプロセスカートリッジ、画像形成装置の実施形態について、図150、図151を用いて説明する。なお、実施例9と同様の構成や機能を有する部材には同一の符号を付け、詳細な説明は省略する。
実施例9のプロセスカートリッジPは、画像形成装置本体502から駆動力を受け、現像ローラ6に駆動力を伝達する現像カップリング部材74と感光ドラム4に駆動力を伝達する感光体カップリング部材43の2つの入力部を有していた。本実施例は画像形成装置本体502から1つの入力部が駆動力を受け、プロセスカートリッジP内で駆動力を分岐し感光ドラム4と現像ローラ6を回転させる構成である。これらの点以外では、本実施例のプロセスカートリッジ及び画像形成装置は実施例9と同じである。本実施例では形態1と形態2について説明する。
[形態1]
[形態1]
図150は、現像ユニット9がカップリング部材174を有する形態1の構成の斜視図である。説明のため、一部部材を省略して示す。カップリング部材174は駆動側に配置され、画像形成装置本体502の不図示のカップリングと係合して駆動力を受ける。カップリング部材174は、実施例9の現像カップリング部材74と同様に現像カバー部材533(現像枠体の一部)によって回転可能の支持されている。そして、カップリング部材174はギア801に駆動力を伝達し、ギア801はギア802に駆動力を伝達し、ギア802は現像ローラ6に駆動力を伝達する。さらに、現像ローラ6はギア803に駆動力を伝達し、ギア803はギア804に駆動力を伝達する。ギア804は感光ドラム4に駆動力を伝達し、感光ドラム4が回転する。つまり、画像形成装置本体502からカップリング部材174で受けた駆動力をプロセスカートリッジ内で分岐して現像ローラ6と感光ドラム4を回転する。従って、カップリング部材174は感光ドラム4を回転駆動するための駆動力を受けるカップリング部材である。
図150に示すように、スペーサ510とスペーサ510が有する力受け部510eは、現像ローラ6の回転軸線方向に関して、カップリング部材174の配置された側と同じ側に配置される。このように、スペーサ510とスペーサ510が有する力受け部510eを配置することで、カップリング部材174が画像形成装置本体502から受ける駆動力によるモーメントをスペーサ510が近くで受ける。このため、現像ユニット9の変形をより小さくすることができ、現像ローラ6と感光ドラム4の離間する距離を高精度に制御することができる。
[形態2]
[形態2]
図151は、ドラムユニット8がカップリング部材143を有する形態2の構成の斜視図である。説明のため、一部部材を省略して示す。カップリング部材143は駆動側に配置(感光ドラムの駆動側の端部に固定)され、画像形成装置本体502から駆動力を受ける。カップリング部材143は、実施例9の感光体カップリング部材43と同様に非駆動側カートリッジカバー部材521(ドラム枠体の一部)によって回転可能の支持されている。そして、カップリング部材143は感光ドラム4に駆動力を伝達し、感光ドラム4は回転する。さらに、感光ドラム4はギア804に駆動力を伝達し、ギア804はギア803に駆動力を伝達する。ギア803は現像ローラ6に駆動力を伝達し、現像ローラ6が回転する。つまり、画像形成装置本体502からカップリング部材143で受けた駆動力をプロセスカートリッジ内で分岐して現像ローラ6と感光ドラム4を回転する。従って、カップリング部材143は現像ローラ6を回転駆動するための駆動力を受けるカップリング部材である。
図151に示すように、スペーサ510とスペーサ510が有する力受け部510eは、現像ローラ6の回転軸線方向に関して、カップリング部材143の配置された側と同じ側に配置される。このように、スペーサ510とスペーサ510が有する力受け部510eを配置する。これにより、カップリング部材143が画像形成装置本体502から受けた駆動力で回転する感光ドラム4に対して、より高精度にスペーサ510を規制位置と許容位置の切り替えができる。従って、現像ローラ6を感光ドラム4へ当接させるタイミングと離間させるタイミングを高精度に制御することができる。
以上説明した本実施例の構成によれば、実施例9と同様の効果を得ることができる。
本発明の実施例12に係るプロセスカートリッジ、画像形成装置の実施形態について、図152、図153を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例では、スペーサの構成と動作以外は実施例9と同様である。
図152は画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー部材820は第一被当接面820c以外を省略して示す。図152(a)に、現像ユニット9が退避位置に位置する状態を示す。図152(b)に、現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図152(c)に、現像ユニット9が現像位置に位置する状態を示す。図153は、図152(c)に示した線XXを通る面で切断した部分断面図であり、現像カバー部材833の下方からスペーサ810を示している。図153(a)に、現像ユニット9が退避位置の状態を示す。図153(b)に、現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図153(c)に、現像ユニット9が現像位置の状態を示す。図153(d)に、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。
スペーサ(保持部材、間隔保持部材、規制部材)810は、第二当接部である被支持穴(被支持部)810a、被支持穴810aから被支持穴810aの半径方向に突出する突出部(保持部)810bを有する。またスペーサ810は、突出部(保持部)810bの先端に設けられドラムユニット8の第一被当接面820cに当接する第一当接部としての第一当接面(当接面)810c、第一当接面810cと隣り合う第三当接面810k、力受け部(当接力受け部)810e、ばね掛け部810g、第一被規制面810hを有している。
また、現像カバー部材833は図153に示すように支持部833c、第一規制面833hを有している。実施例9においてはスペーサ510が現像カバー部材533の側面に配置されているのに対して、本実施例ではスペーサ810が現像カバー部材833の下方に配置されている。そして、支持部833cの外径はスペーサ810の被支持穴810aの内径と嵌合し、支持部833cはスペーサ810を回転可能に支持する。
また、離間制御部材540の第一力付与面540bと係合する退避力受け部(離間力受け部)826aを駆動側軸受826に設けている。また、駆動側軸受826には付勢手段としてのねじりコイルばね830を設置しており、ねじりコイルばね830の一端がばね掛け部810gに係合している。そのため、スペーサ810はねじりコイルばね830により、揺動軸8Hを中心に図153中矢印B81方向へ付勢される。
[離間動作]
[離間動作]
まず図153を用いて、現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する動作について説明する。
図153(c)に示すように、現像ユニット9が現像位置に位置するとき、ねじりコイルばね830はスペーサ810を、被支持穴810aを回転中心として矢印B81方向に付勢する。現像ユニット9が現像位置(当接位置)に位置するとき、スペーサ810の第三当接面810kが駆動側カートリッジカバー820と係合することで、スペーサ810は図153(c)中矢印B81方向への移動を規制される。図153(c)に示すスペーサ810の位置を、スペーサ810の許容位置(第2位置)とする。
離間制御部材540は図153(c)に示す位置から、図153(d)中のW51方向に移動すると、第一力付与面540bと駆動側軸受826の退避力受け部826aが当接する。さらに、離間制御部材540がW51方向に移動し第二位置まで移動すると、現像ユニット9は図152(a)中矢印V1方向に回転し、現像位置から退避位置へ向かう方向へ移動する。
そして、現像ユニット9が図152中矢印V1方向に回転していくと、現像ユニット9に取り付けられたスペーサ810も同様に退避位置へ向かう方向へ移動し、スペーサ810の第三当接面810kと駆動側カートリッジカバー820が離れていく。
図153(d)に示すように、第一当接面(当接部)810cと第一被当接面(被当接部)820cが離れ、隙間T5ができると、スペーサ810はねじりコイルばね830の付勢力によって図153(d)中矢印B81方向に回転する。スペーサ810は、第一当接面810cと同一面に設けられた第一被規制面810hが現像カバー部材833の第一規制面833hと当接するまで回転移動する。尚、図153(d)に示すスペーサ810の位置を規制位置(第1位置)とする。
そして、離間制御部材540が第二位置から、図153(d)中矢印W52方向に移動しホーム位置に戻ると、現像ユニット9は図152(b)中の矢印V2方向に移動し、規制位置に位置するスペーサ810の第一当接面(当接部)810cと第一被当接面(被当接部)820cが当接し、図152(a)および図153(a)に示すように現像ユニット9は退避位置(離間位置)に維持される。このとき、実施例9と同様に、離間制御部材540は退避力受け部826aから離れるので、退避位置に位置する現像ユニット9は離間制御部材540に負荷をかけない。
[当接動作]
[当接動作]
次に、現像ユニット9が退避位置から現像位置に移動する動作について説明する。
離間制御部材540はホーム位置から、図152(b)中矢印W52方向に移動すると、図153(b)に示すように離間制御部材540の第二力付与面540cとスペーサ810の力受け部810eが当接する。
力受け部810eは複数の面が連続的に接続されたカム形状を有する。本実施例においては、力受け面810e1と力受け面810e2による2面が連続的に接続されている。離間制御部材540が矢印W52方向へ移動する際に、離間制御部材540は力受け面810e1と当接することによって、ねじりコイルばね830による矢印B81方向への付勢に抗して、スペーサ810を矢印B82方向へと回転させる。離間制御部材540が力受け面810e1と当接する領域においては、離間制御部材540の矢印W52方向へ移動するのに伴って、スペーサ810が矢印B82方向に回転するようにカム形状が設定されている。
また、離間制御部材540が力受け面810e2と当接する領域においては、離間制御部材540の矢印W52方向への移動に対し、スペーサ810が矢印B82方向に回転する量を緩やかに設定している。スペーサ810の回転量が緩やかになる領域を設定することによって、離間制御部材540の移動に対して、スペーサ810を許容位置まで確実に移動させると共に、離間制御部材540の移動量のバラつきに対して、スペーサ810の矢印B82方向への回転量を抑制している。尚、図153(d)は離間制御部材540が力受け面810e2と当接する状態を示している。
ところで、スペーサ810が矢印B82方向に回転すると、第一当接面810cと第一被当接面820cとの当接する領域は次第に減少していく。そして、スペーサ810が第一当接面810cと第一被当接面820cとが離れる許容位置まで矢印B82方向に回転すると、現像ユニット9は図152(b)中V2方向に回転し、図152(c)に示す現像ローラ6と感光ドラム4が当接する現像位置まで移動する。
このとき、ねじりコイルばね830によって矢印B81方向に付勢されるスペーサ810は、図153(c)に示すように第三当接面810kが駆動側カートリッジカバー820の側面側に当接することで許容位置(第2位置)に維持される。
図152(c)および図153(c)に示すように、現像ユニット9が当接位置に移動した後、実施例9と同様に、離間制御部材540はホーム位置に戻り、スペーサ810と離れるので、現像位置に位置する現像ユニット9は離間制御部材540に負荷をかけない。
このように本実施例では、スペーサ810を現像カバー部材833の下方に配置し、矢印B82方向に回転させることによって、第一当接面(当接部)810cを第一被当接面520cに対しプロセスカートリッジPの長手方向に移動させる。すなわち、第一当接面810cを、第一被当接面520cに対し、少なくともプロセスカートリッジPの長手方向(回転軸線M1又は回転軸線M2の方向)に移動させることによって、スペーサ810を許容位置(第2位置)と規制位置(第1位置)との間で移動させる。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、図143で説明したように、感光ドラム4の回転軸線M1と現像ローラ6の回転軸線をM2とを結ぶ直線を線N2とする。本実施例においても、線N2を境に領域を分けた場合、力受け部810eの少なくとも一部及び退避力受け部826aの少なくとも一部は、線N2を境に現像カップリング部材74の回転軸線Kと反対の領域に配置される。さらに、線N2に直交し、現像ローラ6と感光ドラム4との接触点を通る線N3を境に領域を分けた場合、力受け部810eの少なくとも一部及び退避力受け部826aの少なくとも一部は、線N3を境に感光ドラム4の回転軸線M1と反対の領域に配置される。
力受け部810eはこの領域において、本体に設置されている離間制御部材540からの力を外力として受けている。力受け部810eが外力として受ける力の方向(W52)は、現像ユニット9が離間状態から当接状態へと切り替わる方向である。このため、力受け部810eが受けた外力により、現像ユニット9は離間状態から当接状態へより確実に切り替えることができる。
本発明の実施例13に係るプロセスカートリッジ、画像形成装置の実施形態について、図154を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例では、スペーサの構成と動作以外は実施例9と同様である。
図154は画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー部材920は支持部920aおよび第一被当接面920c以外を省略して示す。図154(a)に、現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図154(b)に、現像ユニット9が退避位置に位置する状態を示す。図154(c)に、現像ユニット9が現像位置に位置する状態を示す。図154(d)に、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。
本実施例においても実施例9と同様に、スペーサ(規制部材、保持部材)910は現像ユニット9が現像位置(当接位置)に移動可能な許容位置(第2位置)と、現像ユニット9を退避位置(離間位置)に維持する規制位置(第1位置)とを移動可能である。スペーサ910は被支持穴(被支持部)910a、被支持穴910aから被支持穴910aの半径方向に突出する突出部(保持部)910bを有する。またスペーサ910は、突出部(保持部)910bの先端に設けられ、ドラムユニット8の第一被当接面920cに当接する第一当接部としての第一当接面(当接部)910c、退避制御面(離間時被押圧部)910d、当接制御面(当接時被押圧部)910eを有する。第一当接面910cは円弧形状であって、その円弧形状中心は被支持穴910aの中心と略同一である。また、退避制御面910dと当接制御面910eとは対向した面であって、退避制御面910dと当接制御面910eとの間には空間910sを有している。
本実施例において、スペーサ910は現像ローラ6と同軸上に配置されている。つまり現像ローラ6と同じ回転軸線M2を中心に回転可能である。現像ローラ6の芯金を長手方向に延出して形成されたスペーサ支持部96を有しており、スペーサ910の被支持穴910aがスペーサ支持部96と係合することで、スペーサ910は現像ローラ6に回転可能に支持される。
移動部材950は被支持穴950a、切替制御部950b、力受け部(当接力受け部)950e、退避力受け部(離間力受け部)950mを有する。
移動部材950は駆動側カートリッジカバー920に配置されており、被支持穴950aが駆動側カートリッジカバー920に設けられた支持部920aに係合することで、移動部材950は駆動側カートリッジカバー920に回転可能に支持される。
移動部材950はスペーサ910と隣接しており、切替制御部950bが退避制御面910dと当接制御面910eとの間の空間910sに配置されている。また、移動部材950の力受け部950eと退避力受け部950mとの間には空間950sを有している。
[離間動作]
[離間動作]
以下、図154を用いて、本実施例における動作について説明する。
まず、現像ユニット9が現像位置から退避位置に移動する動作について説明する。図154(c)に示すように、現像ユニット9が現像位置(当接位置)に位置するとき、スペーサ910は、第一当接面(当接部)910cと第一被当接面(被当接部)920cとが離れた許容位置(第2位置)である。
離間制御部材540は図154(c)に示す位置から、図154(d)に示すようにW51方向に移動すると、第一力付与面540bと移動部材950の退避力受け部950mが当接する。さらに、離間制御部材540がW51方向に移動すると、駆動側カートリッジカバー920に回転可能に支持された移動部材950は、第一力付与面540bからの力を受けて図154(d)中の矢印B1方向に回転する。
移動部材950が矢印B1方向に回転すると、切替制御部950bの離間時当接部が退避制御面(離間時被当接部)910dと当接し、スペーサ910を図154(d)中の矢印B3方向に回転させる。これにより、スペーサ910は、第一当接面(当接部)910cが第一被当接面(被当接部)920cと接触する規制位置(第1位置)まで回転移動し、現像ユニット9が図154(a)に示す退避位置(離間位置)に移動する。
このとき、第一当接面910cは円弧形状であるため、第一被当接面920cからの反力の方向は円弧形状の中心に向かっている。第一当接面910cの円弧形状中心は被支持穴910aの中心および現像ローラ6の中心と略同一である。第一当接面910cは第一被当接面920cからの反力方向をスペーサ910の回動中心に向けることによって、第一被当接面920cからの反力から発生するスペーサ910の回転モーメントを抑制している。その結果、スペーサ910は退避位置において、安定して規制位置(第1位置)を維持し、現像ユニット9は安定して退避位置を維持することができる。尚、第一当接面910cが第一被当接面920cと接触する退避位置において、現像ローラ6と感光ドラム4が図154(a)中の隙間T2だけ離間した状態になるように第一当接面910cおよび第一被当接面920cの形状を設定している。
そして、離間制御部材540が第二位置から、図154(b)中矢印W52方向に移動し、ホーム位置に移動する際には、離間制御部材540の第一力付与面540bおよび第二力付与面540cを有する部分は移動部材950の空間950sを移動する。すなわち、ホーム位置に位置する第一力付与面540bおよび第二力付与面540cは移動部材950と離れた状態であって、退避位置に位置する現像ユニット9は離間制御部材540に負荷をかけない状態である。
[当接動作]
[当接動作]
次に、現像ユニット9が退避位置から現像位置に移動する動作について説明する。離間制御部材540がホーム位置から、図154(a)中矢印W52方向に移動すると、図154(b)に示すように離間制御部材540の第二力付与面540cと移動部材950の力受け部950eが当接し、移動部材950は図154(b)中B2方向に回転する。離間制御部材540が第一位置まで移動し、移動部材950が回転すると、切替制御部950bの当接時押圧部はスペーサ910に設けられた当接制御面(当接時被押圧部)910eと当接し、スペーサ910を図154(b)中B4方向に回転移動させる。その結果、第一当接面910cと第一被当接面920cとが離れ、スペーサ910は許容位置まで移動する。
スペーサ910が許容位置まで移動すると、現像ユニット9は図154(b)中V2方向に回転し、現像ローラ6と感光ドラム4が当接する現像位置まで移動する(図154(c)の状態)。そして、離間制御部材540が第一位置からホーム位置に移動すると、離間制御部材540の第一力付与面540bおよび第二力付与面540cを有する部分は移動部材950の空間950sを移動し、現像ユニット9から離れた状態を維持する。
本実施例において、離間制御部材540は第一位置からホーム位置に移動する際、および、第二位置からホーム位置に移動する際に、移動部材950の空間950sを移動し、離間制御部材540と移動部材950とが離れた状態を維持している。離間制御部材540がホーム位置において、現像ユニット9から負荷を受けなくするための構成として、それに限られるものではなく、図155に示すような構成にしても良い。
すなわち、移動部材950の空間950sを縮小し、移動部材950の力受け部(当接力受け部)950eと退避力受け部(離間力受け部)950mとが離間制御部材540の第一力付与面540bおよび第二力付与面540cと同時に接触する構成であっても良い。また、プロセスカートリッジPが画像形成装置本体502に装着される際に受け部950eと退避力受け部950mとが離間制御部材540の第一力付与面540bおよび第二力付与面540cとを挟み込んで一体化するような構成や、両面テープ等の接着機能により一体化する構成でもよい。但し、移動部材950と離間制御部材540をこのように構成する場合、切替制御部950bと、退避制御面910dと当接制御面910eとの間の空間910sを以下のように構成している。図155に示すように、切替制御部950bが配置されている空間910sを拡大し、離間制御部材540がホーム位置に位置する際に、切替制御部950bは退避制御面910dおよび当接制御面910eと離れた状態にしている。すなわち、現像ユニット9が退避位置に位置する場合において、切替制御部950bと退避制御面910dが離れた状態であるために、現像ユニット9は離間制御部材540にかかる負荷を抑制することができる。
また、現像ユニット9が現像位置に位置する場合においても同様に、切替制御部950bと当接制御面910eが離れた状態であるために、現像ユニット9は離間制御部材540にかかる負荷を抑制することができる。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
尚、図155に示す構成においてもこれまで説明した実施例と同様に、現像ユニット9の移動部材950の力受け部950eが本体に設置されている離間制御部材540からの力を外力として受けている。力受け部950eが外力として受ける力の方向(W52)は、現像ユニット9が離間状態から当接状態へと切り替わる方向である。このため、力受け部950eが受けた外力により、現像ユニット9は離間状態から当接状態へより確実に切り替えることができる。
本発明の実施例14に係るプロセスカートリッジ、画像形成装置の実施形態について、図156、図157を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例では、スペーサの構成と動作以外は実施例9と同様である。
図156、図157は、画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー1120は第一被当接面1120cとばね掛け部1120e以外を省略して示す。
はじめに、図156を用いて、現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する動作について説明する。
本実施例においても実施例9と同様に、スペーサ1110は現像ユニット9が現像位置に移動可能な許容位置と、現像ユニット9を退避位置に維持する規制位置とを移動可能である。
また、画像形成装置本体502に設置される離間制御部材540は、スペーサ(規制部材保持部材)1110を許容位置(第2位置)に移動させる第一位置、スペーサ1110を規制位置(第1位置)に移動させる第二位置を移動可能である。さらに、離間制御部材540は第一位置と第二位置の間で、離間制御部材540が力受け部1110eと退避力受け部1133aとに接触しないホーム位置に移動可能に構成される。
図156(a)に、現像ユニット9が現像位置で離間制御部材540が第一位置の状態を示す。図156(b)、図156(c)に、離間制御部材540が第一位置から第二位置への移動し現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。図156(d)に、現像ユニット9が退避位置で離間制御部材540がホーム位置の状態を示す。
図156(a)に示すように退避力受け部1110mを有するスペーサ1110が実施例9と同様に現像カバー部材1133に配置されている。つまり、第二当接部である被支持穴(被支持部)1110aが支持部1133cに係合することで、スペーサ1110は現像カバー部材1133に回転可能に支持される。
また、スペーサ1110は被支持穴1110aの軸線方向に突出するばね掛け部1110gを有している。駆動側カートリッジカバー1120も第一被当接面1120cから被支持穴1110aの軸線方向に突出するばね掛け部1120eを有していて、保持部付勢部材としての引張りばね1130がばね掛け部1110gとばね掛け部1120eに組付けられる。
ばね掛け部1110gは引張りばね1130の作用点に相当し、引張りばね1130はばね掛け部1110gに図156(a)中矢印F5方向の力を加える。ここで、図156(a)中矢印F5方向は、ばね掛け部1110gとばね掛け部1120eを結んだ線と略平行方向である。つまり、図156(a)に示すように、現像ユニット9が現像位置に位置するとき、引張りばね1130はスペーサ1110に図156(a)中矢印F5方向に力を加え、スペーサ1110を、被支持穴1110aを回転中心とし図156(a)中矢印B2方向に付勢する。
[離間動作]
[離間動作]
離間制御部材540は図156(a)に示す第一位置から、図156(a)中矢印W51方向に移動可能に構成されている。離間制御部材540がW51方向に移動すると、第一力付与面540bとスペーサ1110の退避力受け部1110mが当接し、スペーサ1110の第三当接面1110kがばね掛け部1120eに当接するまで図156(a)中矢印B1方向に回転する(図156(b)に示す状態)。さらに、離間制御部材540がW51方向に移動し図156(c)に示す第二位置まで移動すると、現像ユニット9は図156(b)中矢印V1方向に回転し、現像位置から退避位置方向へ移動する。また、スペーサ1110の第三当接面1110kはばね掛け部1120eから離れ、第一被規制面1110hが第一規制面1133hに当接するまで図156(b)中矢印B1方向に回転し、規制位置(第1位置)に移動する(図156(c)に示す状態)。このとき、ばね掛け部1110gはスペーサ1110の回転とともに図156(b)中矢印B1方向に移動するため、引張りばね1130の作用方向は図156(a)中矢印F5方向から図156(c)中矢印F6方向に切り替わる。つまり、図156(c)に示すように、引張りばね1130はスペーサ1110に図156(c)中矢印F6方向に力を加え、スペーサ1110を、被支持穴1110aを回転中心とし図156(c)中矢印B1方向に付勢する。
このように、引張りばね1130がスペーサに作用する方向を切り替えることで、引張りばね1130がスペーサ1110を付勢する方向が、離間制御部材540のW51方向への移動によりスペーサ1110が移動する方向と一致するので、安定してスペーサ1110を許容位置(第2位置)から規制位置(第1位置)へ移動させることができる。
そして、離間制御部材540が第二位置から、図156(c)中矢印W52方向に移動しホーム位置にすると、現像ユニット9は図156(c)中矢印V2方向に移動し、規制位置(第1位置)に位置するスペーサ1110の第一当接面(当接部)1110cと、駆動側カートリッジカバー1120の第一被当接面(被当接部)1120cが当接する。この時、スペーサ1110は、被支持穴(被支持部)1110aが現像カバー部材1133の支持部1133c当接している。このため、スペーサ1110の被支持穴1110aと第一当接面1110cとの間を繋ぐ部分が、実施例9の突出部(保持部)510bと同様に、現像カバー部材1133を保持する保持部として機能する。その結果、現像ユニット9は退避位置(離間位置)に維持される(図156(d)に示す状態)。このとき、実施例9と同様に、ホーム位置に位置する離間制御部材540はスペーサ1110と離れるので、退避位置に位置する現像ユニット9は離間制御部材540に負荷をかけない。
また、図156(d)に示す現像ユニット9が退避位置に位置する状態において、引張りばね1130は、スペーサ1110に図156(d)中矢印F6方向の力を加え、矢印B1方向に付勢しているため、スペーサ1110は安定して規制位置(第1位置)を維持し、現像ユニット9は安定して退避位置(離間位置)を維持することができる。
[当接動作]
[当接動作]
次に、図157を用いて、現像ユニット9が退避位置(離間位置)から現像位置(当接位置)に移動する動作について説明する。図157(a)に、現像ユニット9が退避位置で離間制御部材540がホーム位置に位置する状態を示す。図157(b)に、離間制御部材540がホーム位置から第一位置方向に移動し現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図157(c)に、現像ユニット9が現像位置で離間制御部材540が第一位置に位置する状態を示す。
離間制御部材540がホーム位置から、図157(a)中矢印W52方向に移動すると、離間制御部材540の第二力付与面540cとスペーサ1110の力受け部1110eが当接し、スペーサ1110は図157(b)中B2方向に回転する。離間制御部材540が第一位置まで移動し、スペーサ1110が回転すると第一当接面1110cと駆動側カートリッジカバー1120の第一被当接面1120cとが離れ、スペーサ1110は許容位置(第2位置)まで移動する。スペーサ1110が許容位置まで移動すると、現像ユニット9は図157(b)中V2方向に回転し、現像ローラ6と感光ドラム4が当接する現像位置(当接位置)まで移動する(図157(c)の状態)。第一位置に移動した離間制御部材540は現像位置に移動した現像ユニット9のスペーサ1110と離れるので、離間制御部材540は現像ユニット9から負荷を受けなくなる。
また、このように現像ユニット9が退避位置から現像位置に移動する際に、スペーサ1110のばね掛け部1110gはスペーサ1110の回転とともに図156(b)中矢印B2方向に移動する。引張りばね1130の作用方向は図157(a)中矢印F6方向からに図157(c)中矢印F5方向に切り替わり、引張りばね1130がスペーサ1110を付勢する方向は、図157(a)中矢印B1方向からに図157(c)中矢印B2方向に切り替わる。つまり、引張りばね1130によるスペーサ1110の付勢方向が、離間制御部材540のW52方向の移動によるスペーサ1110の回転方向と一致するので、安定してスペーサ1110を規制位置(第1位置)から許容位置(第2位置)へ移動させることができる。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また本実施例では、引張りばね1130によるスペーサ1110の付勢方向を離間制御部材540によるスペーサの回転方向と一致させることができるので、スペーサ1110の許容位置と規制位置間の移動を安定させることができる。つまり、現像ユニット9の姿勢の制御を安定させることができる。
また、本実施例では、現像ユニット9が現像位置に位置するとき、離間制御部材540を第一位置で停止させているが、それに限られるものではない。実施例9のように、第ニ位置から第一位置に移動させた離間制御部材540を第一位置からホーム位置に戻してから停止させるように構成してもよい。
本発明の実施例15に係るプロセスカートリッジ、画像形成装置の実施形態について、図158、図159、図160を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例では、スペーサの構成と動作以外は実施例9と同様である。実施例9では、スペーサ510は、現像ユニット(又は現像枠体)やドラムユニット(又はドラム枠体)に対して回転することで規制位置と許容位置との間を移動する構成であったが、スペーサ510の現像枠体に対する移動は回転に限られない。つまり、実施例9において、スペーサ510が現像枠体に対して所定の方向に移動する(例えば直線移動)ことで、規制位置と許容位置との間を移動する構成に変更したものが本実施例である。また本実施例では実施例9の別形態1と同様に、スペーサ1210はドラムユニット(又はドラム枠体)に支持されている。
本実施例においても実施例9と同様に、スペーサ1210は現像ユニット9が現像位置に移動可能な許容位置(第2位置)と、現像ユニット9を退避位置に維持する規制位置(第1位置)との間を移動可能である。
また、画像形成装置本体502に設置される離間制御部材540は、スペーサ1210を許容位置に移動させる第一位置、スペーサ1210を規制位置に移動させる第二位置を移動可能である。さらに、離間制御部材540は第一位置と第二位置の間で、離間制御部材540が力受け部(当接力受け部)1210eと退避力受け部(離間力受け部)1233aとに接触しないホーム位置に移動可能に構成される。
実施例9ではスペーサ510を現像ユニット9に設置したが、本実施形態では、スペーサ1210を駆動側カートリッジカバー部材1220に設置する実施形態を説明する。図158は駆動側カートリッジカバー部材1220に取り付けられたスペーサ1210を示す斜視図である。図158に示すように、駆動側カートリッジカバー部材1220に支持部1220fを設け、スペーサ1210の被支持穴(被支持部)1210aが支持部1220fと係合することで、スペーサ1210は駆動側カートリッジカバー部材1220に支持される。被支持穴1210aは長穴形状になっていて、スペーサ1210は図158中矢印B3、B4方向に移動可能に支持される。図158中矢印B3、B4方向は図5中矢印Z1、Z2方向と略平行な方向である。
スペーサ1210は被支持穴1210aから突出する突出部1210bを有する。またスペーサ1210は、突出部1210bの先端に第一当接部に相当する第一当接面(当接部)1210cを備え、突出部1210bの側面に第一当接面1210cと繋がる第一被規制面1210hを備える。更に、スペーサ1210は被支持穴1210aの図158中矢印B4方向に力受け部(当接力受け部)1210eを有している。
[離間動作]
[離間動作]
はじめに、図159を用いて、現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する動作について説明する。図159は、画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー1220は支持部1220f以外を省略して示す。図159(a)に、現像ユニット9が現像位置の状態を示す。図159(b)に、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。図159(c)に、現像ユニット9が退避位置の状態を示す。
図159(a)に示すように、現像カバー部材1233は現像ユニット9の揺動軸K方向(長手方向外側)に突出する規制部1233eを有している。現像ユニット9が現像位置に位置するとき、スペーサ1210の第一被規制面1210hが規制部1233eに係合することで、スペーサ1210の図159(a)中矢印B4方向への移動が規制される。図159(a)に示すスペーサ1210の位置を、スペーサ1210の許容位置(第2位置)とする。
離間制御部材540が図159(a)中矢印W51方向に移動し、第一力付与面540bと現像カバー部材1233の退避力受け部(離間力受け部)1233aが当接する。さらに、離間制御部材540がW51方向に移動し第二位置まで移動すると、現像ユニット9は図159(b)中矢印V1方向に回転し、現像位置から退避位置方向へ移動する。このとき、現像カバー部材1233の規制部1233eは現像ユニット9の回転とともに移動するため、第一被規制面1210hは規制部1233eと離れ、スペーサ1210は自重により図159(b)中矢印B4方向に移動する。図159(b)に示すスペーサ1210の位置を規制位置(第1位置)とする。
そして、離間制御部材540が第二位置から、図159(b)中矢印W52方向に移動しホーム位置に戻ると、現像ユニット9は図159(b)中矢印V2方向に移動し、規制位置に位置するスペーサ1210の第一当接面1210cと規制部1233eが当接し、現像ユニット9は退避位置に維持される(図159(c)に示す状態)。このとき、実施例9と同様に、離間制御部材540はスペーサ1210と離れるので、退避位置に位置する現像ユニット9は離間制御部材540に負荷をかけない。
[当接動作]
[当接動作]
次に、図160を用いて、現像ユニット9が退避位置(離間位置)から現像位置(当接位置)に移動する動作について説明する。図160は、画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー1220は支持部1220f以外を省略して示す。
図160(a)に、現像ユニット9が退避位置に位置する状態を示す。図160(b)、図160(c)に、現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図160(c)に、現像ユニット9が現像位置に位置する状態を示す。
離間制御部材540はホーム位置から、図160(a)中矢印W52方向に移動すると、離間制御部材540の第二力付与面540cとスペーサ1210の力受け部(当接力受け部)1210eが当接する(図160(b))。さらに、離間制御部材540が図160(b)中矢印W52方向に移動すると、離間制御部材540に押されるスペーサ1210は図160(b)中B3方向に移動し、スペーサ1210は第一当接面1210cと規制部1233eとが離れる許容位置(第2位置)まで移動する(図160(c))。スペーサ1210が許容位置まで移動すると、現像ユニット9は図160(c)中V2方向に回転し、現像ローラ6と感光ドラム4が当接する現像位置まで移動する(図160(d))。現像ユニット9が現像位置に移動した後、実施例9と同様に、離間制御部材540はホーム位置に戻り、スペーサ1210と離れるので、現像位置に位置する現像ユニット9は離間制御部材540に負荷をかけない。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
このように本実施例では、駆動側カートリッジカバー部材1220(ドラムユニット8)で支持したスペーサ1210を許容位置(第2位置)と規制位置(第1位置)との間を直線的に移動させることで、現像ユニット9のドラムユニット8に対する位置を変更可能とした。
次に、図161~図164を用いて、実施例16について説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。なお、本実施例では、プロセスカートリッジの離間当接機構を駆動側にのみ配置した場合について説明する。
[スペーサの上部配置]
[スペーサの上部配置]
実施例1~15では、スペーサを感光ドラムと現像ローラの近傍に配置する構成をとったが、それに限定するものではなく、適用する構成に応じて駆動側カートリッジカバー部材の任意の位置に配置することが可能である。ここでは、その一例としてスペーサを現像ユニットの揺動軸Kよりも上方に配置した場合について図161、図162を用いて説明する。
図161は、駆動側カートリッジカバー部材1716と、引っ張りバネ1753、スペーサ1751A、移動部材1752A、現像カバー部材(現像枠体の一部)1728の分解斜視図であり、(a)は駆動側方向、(b)は非駆動側方向から見た図を示している。図162は、プロセスカートリッジ1700Aの断面図であり、離間当接機構に関する動作を説明する図である。(a)は現像ユニット1709Aの離間の状態を示しており、(b)は現像ユニット1709Aの当接状態を示している。
まず、スペーサ(保持部材、規制部材)1751Aについて図162を用いて説明する。被支持穴1751Aaは、現像ユニット1709Aの揺動軸Kに対して現像ローラ1706とは反対側に設けられた現像カバー部材1728Aの第一支持部(支持部)1728Acによって回転可能に支持される。離間保持部(保持部)1751Abは、被支持穴1751Aaから現像ユニット当接時の回転方向であるV2の下流方向へ突出し、その先端に当接面(当接部)1751Acを有する。さらに、当接面1751Acと隣り合う第二被規制面1751Akを有する。第二被押圧部1751Adは、被支持穴1751Aaから揺動軸Kとは反対側の方向に突出している。また、第二被押圧部1751Adの先端には、被支持穴1751Aaを中心とした反時計回りB1方向側の面に第二被押圧面1751Aeを有する。ばね掛け部1751Agは、第2被押圧面1751Aeよりも被支持穴1751Aaを中心とした反時計回りB1方向側に設けられる。また、ばね掛け部1751Agは、被支持穴1751Aaと後述する移動部材1752Aのばね掛け部1752Asとを結んだ直線に対して、ばね掛け部1752Asを中心とした反時計回り方向側に配置される。
次に、移動部材1752Aについて説明する。長丸被支持穴1752Aaは、移動部材1752Aの略中央に設けられた現像カバー部材1728Aの第二支持部1728Akによって回転可能に支持される。第二押圧面(当接時押圧部)1752Arは、現像カバー部材1728Aの第一支持部1728Acを中心として反時計回りB1方向で、スペーサ1751Aの第二被押圧部(当接時被押圧部)1751Aeに対向して設けられる。ばね掛け部1752Asは、長丸被支持穴1752Aaと第二押圧面1752Arの間に設けられる。なお、移動部材1752Aのその他の構成は実施例1と同様のため、その説明を省略する。次に、駆動側カートリッジカバー部材1716Aについて説明する。駆動側カートリッジカバー部材1716Aには、現像ユニット1709Aが離間した状態(図162(a))において、スペーサ1751Aの当接面1751Acに当接する当接面(被当接部)1716Acが設けられる。また、当接面1716Acから揺動軸K側で隣り合う第二規制面1716Acが設けられている。
次に、引っ張りバネ1753は、スペーサ1751Aのばね掛け部1751Agと、移動部材1752Aのばね掛け部1752Asに取り付けられている。そして、引っ張りバネ1753は、スペーサ1751Aの被支持穴1751Aaを中心に反時計回りB1方向に付勢している。
[当接動作及び離間動作]
[当接動作及び離間動作]
次に、当接離間機構の動作について説明する。まず、図162(a)に示すような、現像ユニット1709Aが退避位置(離間位置)にある現像離間状態の時、スペーサ1751Aの当接面1751Acが駆動側カートリッジカバー部材1716Aの当接面1751Acに当接している。それにより、感光ドラム1704と現像ローラ1706の離間量P1に維持している。この時、スペーサ1751Aは規制位置(第1位置)にある。
次に、現像離間の状態から、図162(b)に示す現像当接の状態になる動作について説明を行う。装置本体170の離間制御部材196R(不図示)がW42方向に移動して第二力受け部(当接力受け部)1752Anに当接し押圧することで、移動部材1752Aが第二支持部1728Akを中心としてBB方向(時計方向)に回動する。そして、第二押圧面1752Arが第二被押圧面1751Aeに当接することで、スペーサ1751Aが第一支持部1728Acを中心として時計回りB2方向に回動し、規制位置(第1位置)から許容位置(第2位置)へ移動する。これにより、現像ユニット1709Aが揺動軸Kを中心として回動して現像位置(当接位置)へ移動し、現像ローラ1706と感光ドラム1704が当接する(現像当接状態)。
次に、図162(b)に示す現像当接状態から、図162(a)に示す現像離間の状態になる動作について説明を行う。図162(b)に示す状態から装置本体170の離間制御部材196R(付図示)がW41方向に移動して第一力受け部(退避力受け部、離間力受け部)1752Akに当接する。これにより移動部材1752Aが1728Akを中心としてBB方向の逆方向(反時計方向)に回動する。そして現像枠体押圧面(離間時押圧部)1752Aqが、現像カバー部材1728の被押圧面(離間時被押圧部)1728Ahを押圧することで、現像ユニット1709Aが揺動軸Kを中心として回動する。この時、引っ張りバネ1753の作用によりスペーサ1751Aが第一支持部1728Acを中心として反時計回り方向B1に回動する。これにより、スペーサ1751Aの当接面1751Acが駆動側カートリッジカバー部材1716Aの当接面1751Acに当接し、現像ユニット1709Aの離間状態が保持される。
このように本実施例によれば、スペーサ1751Aを、揺動軸Kを挟んで第二力受け部(当接力受け部)1752An及び第一力受け部(退避力受け部、離間力受け部)1752Akの反対側(もしくは揺動軸Kよりも上方)に配置することができる。
また、本実施例のスペーサ1751Aは、移動部材1752Aを介して装置本体170の離間制御部材196Rから力を受けることで、第1位置と第2位置との間を移動可能な構成であった。しかし、本実施例のスペーサ1751Aを、実施例9等に示したような、移動部材を介さず直接装置本体170の離間制御部材196Rから力を受けて第1位置と第2位置との間を移動可能な構成としても良い。
<実施例16の別形態>
<実施例16の別形態>
本別形態では、スペーサをドラムユニットへ引っ掛けることで現像ユニットを離間状態で保持する構成について、図163、図164を用いて説明する。図163は、引っ張りバネ1753、スペーサ1751A、移動部材1752A、現像カバー部材1728の分解斜視図であり、(a)は駆動側、(b)は非駆動側からそれぞれ見た図を示している。図164は、プロセスカートリッジ1700Bの断面図であり、離間当接機構に関する動作を説明する図である。(a)は現像ユニット1709Aの離間の状態を示しており、(b)は現像ユニット1709Aの当接状態を示している。
まず、ドラム枠体1715Bについて図164を用いて説明する。ドラム枠体1715Bには、現像ユニット1709Bの揺動軸Kと感光ドラム1704軸を結んだ線を挟んで現像ローラ1706とは反対側に係合部(ドラムユニット(ドラム枠体)側係合部)1715Bbが設けられる。係合部1715Bbは、現像ユニット1709B側に伸び、その先端にドラムユニット1708B方向に向く被当接面1715Bcが設けられる。そして、係合部1715Bbは、被当接面1715Bcと隣り合い、感光ドラム1704とは反対側の方向に向く第二規制面1715Bdが設けられる。
次に、スペーサ1751Bについて説明する。被支持穴(被支持部)1751Baは、現像カバー部材(現像枠体の一部)1728Bの第一支持部1728Bcによって回転可能に支持される。つまり、被支持穴(被支持部)1751Baは第一支持部1728Bcと接触している。また、第一支持部1728Bcは、現像ユニット1709Bの揺動軸Kを挟んで現像ローラ1706、第二力受け部(当接力受け部)1752Bn、及び第一力受け部(退避力受け部、離間力受け部)1752Bkとは反対側に設けられている。離間保持部(保持部、スペーサ側係合部)1751Bbは、被支持穴1751Baからドラム枠体1715Bの係合部1715Bbに向かって突出する(伸びる)ように設けられている。換言すれば、離間保持部1751Bbは、被支持穴1751Baから、現像ユニット1709が離間状態から当接状態に向かって回転するV2方向で下流から上流に向かう方向に沿う方向に突出するように設けられている。離間保持部1751Bbの先端には、現像ユニット1709Bの方向へ向いた当接面(当接部)1751Bcが設けられる。そして、当接面1751Bcは、現像ユニット1709Aが離間した状態においてドラム枠体1715の被当接面1715Bcに当接するように配置される。さらに、離間保持部1751Bbには、当接面1751Bcと隣り合い、感光ドラム1704方向(第二規制面1715Bdとは反対方向)に向く第二被規制面1751Bkを有する。第二被押圧部1751Bdは、被支持穴1751Baから揺動軸Kとは反対側の方向に突出している。また、第二被押圧部1751Bdの先端には、被支持穴1751Baを中心とした反時計回りB1方向側の面に第2被押圧面(当接時力受け部)1751Beを有する。ばね掛け部1751Bgは、離間保持部1751Bb上で、被支持穴1751Aaと当接面1751Bcの間に設けられる。また、ばね掛け部1751Bgは、被支持穴1751Baと後述する移動部材1752Bのばね掛け部1752Bsとを結んだ直線に対して、ばね掛け部1752Bsを中心とした反時計回り方向側に配置される。
次に、移動部材1752Bについて説明する。長丸被支持穴1752Baは、移動部材1752Bの略中央に設けられた現像カバー部材1728Bの第二支持部1728Bkによって回転可能に支持される。第二押圧面(当接時押圧部)1752Brは、現像カバー部材1728Bの第一支持部1728Bcを中心として反時計回りB1方向でスペーサ1751Bの第二被押圧部1751Beに対向して設けられる。ばね掛け部1752Bsは、長丸被支持穴1752Baと第二押圧面1752Brの間に設けられる。また移動部材1752Bは、装置本体170の離間制御部材196R(不図示)から力を受ける、第二力受け部(当接力受け部)1752Bn及び第一力受け部(退避力受け部、離間力受け部)1752Bkを備える。移動部材1752Bのその他の構成は実施例1と同様のため、その説明を省略する。
引っ張りバネ1753は、スペーサ1751Bのばね掛け部1751Bgと、移動部材1752Bのばね掛け部1752Bsに取り付けられている。そして、引っ張りバネ1753は、スペーサ1751Aの被支持穴1751Aaを中心にB1方向(図中反時計方向)に回転する向きにスペーサ1751Aを付勢している。
[当接動作及び離間動作]
[当接動作及び離間動作]
次に、当接動作及び離間動作について説明する。まず、図164(a)に示すような現像ユニット1709Bが離間状態のとき、スペーサ1751Bの当接面1751Bcがドラム枠体1715Bの被当接面1715Bcに当接(係合)し、被支持穴(被支持部)1751Baは第一支持部1728Bcと接触している。このため、現像ローラ1706が感光ドラム1704との間の離間量P1を維持するように、現像ユニット1709Bの退避位置(離間位置)から現像位置(当接位置)へ向かうV2方向の移動(回転)が規制されている。この時のスペーサ1751Bの位置を規制位置(第1位置)とする。
次に、現像ユニット1709Bが離間状態から、図164(b)に示す当接状態へ移行する動作について説明を行う。離間制御部材196R(不図示)がW42方向に移動して第二力受け部(当接力受け部)1752BnをW42方向に押圧することで、移動部材1752Bが第二支持部1728Bkを中心として時計回りBB方向に回動する。そして、第二押圧面(当接時押圧部)1752Brが第二被押圧面(当接時被押圧部)1751Beに当接することで、スペーサ1751Bが第一支持部1728Bcを中心としてB2方向(図中時計方向)に回動する。これにより、当接面1751Bcが被当接面1715Bcに対してB2方向に移動し、被当接面1715Bcと離間し、係合部1715Bbと離間保持部1751Bbとの係合が解除される。この時のスペーサ1751Bの位置を許容位置(第2位置)とする。このようにスペーサ1751Bが規制位置から許容位置へ移動することにより、現像ユニット1709BのV2方向(退避位置から現像位置へ向かう方向)への移動の規制が解除される。このため、現像ユニット1709Bは、現像ローラ1706と感光ドラム1704が当接するまで揺動軸Kを中心としてV2方向に回動し、現像位置(当接位置)への移動が完了する。
最後に、図164(b)に示す現像当接の状態から、図164(a)に示す離間状態になる動作について説明を行う。図164(b)に示す当接状態から、離間制御部材196R(付図示)がW41方向に移動して第一力受け部(退避力受け部、離間力受け部)1752BkをW41方向に押圧する。これにより移動部材1752Bが1728Bkを中心としてBB方向の逆方向(反時計方向)に回動する。そして現像枠体押圧面(離間時押圧部)1752Bqが、現像カバー部材1728Bの被押圧面(離間時被押圧部)1728Bhを押圧することで、現像ユニット1709Bが揺動軸Kを中心としてV2方向の逆方向(反時計方向)に回動する。この時、引っ張りバネ1753の作用によりスペーサ1751Bが第一支持部1728Bcを中心として反時計回り方向B1に回動する。これにより、図164(a)に示すように、スペーサ1751Bの当接面1751Bcがドラム枠体1715Bの被当接面1715Bcに当接し、係合部1715Bbと離間保持部1751Bbとが係合し、現像ユニット1709Bの離間状態が保持される。
なお、本実施例のスペーサ1751Bは、移動部材1752Bを介して装置本体170の離間制御部材196Rから力を受けることで、第1位置と第2位置との間を移動可能な構成であった。しかし、本実施例のスペーサ1751Bを、実施例9等に示したような、移動部材を介さず直接装置本体170の離間制御部材196Rから力を受けて第1位置と第2位置との間を移動可能な構成としても良い。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また本実施例によれば、スペーサ1751Bを、揺動軸Kを挟んで第二力受け部(当接力受け部)1752Bn及び第一力受け部(退避力受け部、離間力受け部)1752Bkの反対側(もしくは揺動軸Kよりも上方)に配置することができる。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。本実施例ではプロセスカートリッジの離間当接機構において、スペーサが離間を保持するモーメントを、本体の離間制御部材が移動部材を介して離間を解除するモーメントが上回ることで離間を解除する構成について説明する。また、本実施例の[離間当接機構の構成]、[現像ユニットの当接動作]、[現像ユニットの離間動作]に関して具体的に説明する。その他のプロセスカートリッジの構成については実施例1と同様のためここでは省略する。また、非駆動側は駆動側と同様の構成で同様の動作となるため、本実施例の説明では駆動側を代表して説明し非駆動側の説明を省略する。
[離間当接機構の構成]
[離間当接機構の構成]
本実施例におけるプロセスカートリッジ1800の感光ドラム104と、現像ユニット1809が有する現像ローラ106とが、離間および当接を行う構成について詳細に説明する。図165(a)はプロセスカートリッジ単体の駆動側側面図、図165(b)はプロセスカートリッジ単体の非駆動側側面図を示す。駆動側に離間当接機構1850R、非駆動側に離間当接機構1850Lを有する。図166は離間当接機構1850Rを含む現像ユニット1809の駆動側の組立斜視図を示す。図167は離間当接機構1850Lを含む現像ユニット1809の非駆動側の組立斜視図を示す。ここでは駆動側の離間当接機構1850Rの詳細を説明する。尚、離間当接機構については駆動側、非駆動側ほぼ同一機能を有しているため、駆動側については各部材の符号にRを記載する。非駆動側については各部材の符号を駆動側と同一にして、Lを記載する。
離間当接機構1850Rはスペーサ(離間保持部材、規制部材)、移動部材1852R、引っ張りバネ1853を有し、スペーサは現像側係合部1854Rおよび現像側係合部1854Rと係合するドラム側係合部1855Rを有する。
図168は現像側係合部1854Rの拡大図を示す。現像側係合部1854Rは現像ユニット1809に設けられる。現像側係合部1854Rは現像カバー部材1828と一体的に樹脂で成形されている。また、図165の方向から見たときに、後述する第一力受け面1852Rm(図173参照)と揺動軸Kを結んだ線分と、現像側係合部1854Rと揺動軸Kを結んだ線分とが形成する角が鈍角になるように現像側係合部1854Rは位置する。また、現像側係合部1854Rは離間状態において、ドラム側係合部1855Rと接触する現像側係合爪1854Ra、現像枠体の一部である現像カバー部材1828と現像側係合爪1854Raとを繋ぐ板状の現像側保持部1854Rbを有する。現像側係合爪1854Raは離間状態においてドラム側係合部1855Rと接触する現像側係合面(当接部)1854Rcと、当接状態から離間状態に遷移する過程でドラム側係合部1855Rと接触する現像側係合復帰面1854Rdを有する。後述する理由により、現像ユニットが揺動軸Kを中心に回転したとき現像側スペーサの移動量はより大きい方が好ましい。そのため、本実施例では現像側スペーサを現像側スペーサと揺動軸Kとの距離をより大きく設けることが可能な先述した位置に設けたが、その限りではない。
本実施例では現像側係合部1854Rを現像枠体の一部である現像カバー部材1828に設けたが、その限りではなく、現像枠体の一部を構成する他の部材に設けてもよい。
図169はドラム側係合部1855Rの拡大図を示す。ドラム側係合部1855Rは現像側係合部1854Rと係合して現像ユニット1809を離間状態で保持可能となるよう、ドラムユニット1808に設けられる。ドラム側係合部1855Rは第1ドラム枠体部1815に一体的に樹脂で成形されている。また、ドラム側係合部1855Rは離間状態において現像側係合爪1854Raと係合するドラム側係合爪1855Ra、第1ドラム枠体部1815とドラム側係合爪1855Raとを繋ぐ板状のドラム側保持部1855Rbを有する。さらに、ドラム側係合爪1855Raは離間状態において現像側係合面1854Rcと接触するドラム側係合面(被当接部)1855Rcと、当接状態から離間状態に遷移する過程で現像側係合復帰面1854Rdと接触するドラム側係合復帰面1854Rdを有する。本実施例ではドラム側係合部1855Rをドラム枠体の一部である第1ドラム枠体部1815に設けたが、その限りではなく、駆動側カートリッジカバー部材1816等のドラム枠体の一部を構成する他の部材に設けてもよい。
図170は現像側係合部1854Rとドラム側係合部1855Rとが係合した状態、つまり、現像ユニット1809が離間状態の斜視図を示す。現像側係合部1854Rとドラム側係合部1855Rとが係合した状態において、現像側保持部1854Rbはドラム側保持部1855Rbと略平行となっている。この状態はスペーサを構成する現像側係合部1854R及びドラム側係合部1855Rがそれぞれ規制位置(第1位置、係合位置)にあると言える。
図166に示すように、移動部材1852Rは第三支持部1828mに移動部材1852Rの支持受け部1852Raが係合することで、第三支持部1828mを中心に回動可能に保持されている。また、移動部材1852Rは装置本体側に設置された離間制御部材196R(図173参照)と係合可能な第一力受け面(退避力受け部、離間力受け部)1852Rm、第二力受け面(当接力受け部)1852Rp(図171参照)を有し、引っ張りバネ1853と係合するばね掛け部1852Rsを有する。
また、図165に示すように引っ張りバネ1853は端部がそれぞれ移動部材1852のばね掛け部1852Rsと現像カバー部材1828のばね掛け部1828gに係合している。したがって、移動部材1852は引っ張りバネ1853により、上方向および第三支持部1828mを回転中心としてCA方向に付勢される。
[現像ユニットの当接動作]
[現像ユニットの当接動作]
次に、離間当接機構1850Rによる、感光ドラム104と現像ローラ106が当接する動作について図170~図175を用いて詳細に説明する。図170、図173、図177はプロセスカートリッジ1800の駆動側の斜視図。図171、図174、図175、図178は本体内に装着されたプロセスカートリッジ1800および後述する離間制御部材196の側面図を示す。なお、図171、図174、図175、図178では(a)で駆動側側面図、(b)で非駆動側側面図を示す。図172、図176は、現像ローラ106の回転軸線M2及びU1、U2方向に直交する方向に沿って上方からプロセスカートリッジ180を見た図である。U1、U2方向は現像ローラ106の回転軸線M2に直交し、W41、W42方向に平行な方向である。
本実施例構成では、現像入力カップリング132は画像形成装置本体170から図171の矢印V2方向に駆動力を受け、現像ローラ106が回転する。つまり、現像入力カップリング132を有する現像ユニット1809は、画像形成装置本体170から矢印V2方向のトルクを受ける。図170に示すように現像ユニット1809が離間位置で、現像側係合部1854Rとドラム側係合部1855Rが互いに係合することで、現像ユニット1809が上記トルクおよび後述する現像加圧ばね134による付勢力に抗して現像ユニット1809を離間位置に保持する。この装置本体170からのトルク及び現像加圧ばね134による付勢力によって現像ユニット1809に発生するV2方向のトルクの大きさをTr1とする。
前述した実施例1と同様に本実施例の画像形成装置本体170は、前述のように各プロセスカートリッジ1800に対応して、離間制御部材196Rおよびカートリッジ押圧ユニット121を有している。離間制御部材196Rは、プロセスカートリッジ1800に向かって突出し、空間196Rdを有する。また、前述した実施例1と同様に前ドア111が開状態から閉状態に移行するのと連動して、カートリッジ押圧ユニット121が移動部材1852Rの被押し込み面1852Rfを押圧し、移動部材1852Rは下方へと突出する。所定の位置まで突出したとき、移動部材の一部が離間制御部材196Rの空間196Rdに侵入し、離間制御部材196Rは、移動部材1852Rの第一力受け面1852Rm、第二力受け面1852Rpと空間196Rdを介して互いに向かい合う第一力付与面196Raと第二力付与面196Rbを有する。第一力付与面196Raと第二力付与面196Rbは画像形成装置本体170下面側にて連結部196Rcを介して連結している。また離間制御部材196Rは回動中心196Reを中心として、制御板金(不図示)に回転自在に支持されている。離間制御部材196Rは付勢バネ(不図示)により常にE1方向に付勢され、不図示のホルダーによって回転方向を規制されている。また、制御板金(不図示)が不図示の制御機構によりホーム位置からW41及びW42方向に移動可能に構成されることにより、離間制御部材196RはW4、W42方向に移動可能に構成される。
離間制御部材196RがW42方向に移動すると、離間制御部材196Rの第二力付与面196Raと移動部材1852Rの第二力受け面1852Rpが当接し、移動部材1852Rが支持受け部1852Raを回転中心としてCA方向へ移動部材1852Rの現像カバー押圧面1852Rrが現像カバー部材1828に設けられた移動部材係止部1828hに当接するまで回転する。さらに、離間制御部材196RがW42方向に移動すると、移動部材1852Rが現像カバー部材1828の移動部材係止部1828hを押圧することで、現像ユニット1809にV2方向のトルクが発生する。このトルクの大きさをTr2、本体が発生させることが可能な最大値をTr2MAXとする。
次に、図170~図175を用いて先述した離間制御部材196RがW42方向に移動し、現像ユニット1809にV2方向のトルクが発生したときの現像側係合部1854Rおよびドラム側係合部1855Rに発生する力および各構成部の挙動を説明する。まず、現像側係合面1844Rcとドラム側係合面1855Rcが接した状態を係合状態(図170の状態)とする。このとき、図170、図171に示す現像側係合面1854Rcとドラム側係合面1855Rcとの間で発生する垂直抗力N1、N1′の方向のうちプロセスカートリッジの短手方向成分を軸U(図170)とする。また、軸Uに平行で、現像ユニット1809がV2方向に回転するときに現像側係合部1854Rが動く方向をU1、反対方向をU2とする。現像ユニット1809がV2方向にトルクを受けると現像側係合部1854RはU1方向に力を受ける。プロセスカートリッジ1800の長手方向に平行で非駆動側から駆動側に進む方向を方向J1、反対方向を方向J2とする。このとき、図172に示すように現像側係合面1854Rcとドラム側係合面1855Rcとの間に発生する垂直抗力のうち現像側係合面1854Rcに加わる垂直抗力を垂直抗力N1、ドラム側係合面1854Rcに加わる垂直抗力を垂直抗力N1′とする。垂直抗力N1は、現像側係合爪1854Raが支点Sを中心として図172中で反時計方向に回転するように現像側保持部1854Rbが撓む(弾性変形する)ように発生する。垂直抗力N1′は、ドラム側係合爪1855Raが支点S′を中心に図172中で反時計方向に回転するようにドラム側保持部1855Rbを撓む(弾性変形する)ように発生する。即ち、現像側保持部1854RbはJ1方向、ドラム側保持部1855RbはJ2方向に撓む。そして、現像側係合部1854RがU2方向に一定の力を受けU2方向へ移動すると、現像側係合面1854Rcとドラム側係合面1855Rcが接触しなくなるまで現像側保持部1854Rbおよびドラム側保持部1855Rbが撓み、係合が解除される。このように、現像側係合面1854Rcとドラム側係合面1855Rcが接触しなくなるまで現像側保持部1854Rbおよびドラム側保持部1855Rbが撓んだ状態は、スペーサを構成する現像側係合部1854R及びドラム側係合部1855Rがそれぞれ許容位置(第2位置、係合解除位置)にあると言える。また、この係合を解除するのに必要な力の大きさをFaとする。
係合が解除された後、現像側係合部1854Rおよびドラム側係合部1855Rは、図173に示すように現像側保持部1854Rbおよびドラム側係合部1855Rbの弾性変形が復元して撓みが解放される。そして、現像側係合復帰面1854Rdとドラム側係合復帰面1855Rdが対向した状態となる。それと同時に、現像ユニット1809はV2方向に回転し、現像ローラ106と感光ドラム104が当接する当接位置(現像位置)まで移動する(図174の状態)。このとき、離間制御部材196RはW42方向に現像側係合部1854Rとドラム側係合部1855Rの係合が解除されるのに十分な量を移動しており、移動後の位置(図174)を第一位置とする。ホーム位置と第一位置との距離はより小さい方が離間制御部材196Rを駆動する本体機構の小型化、負荷低減が可能なため好ましい。また、現像側係合部1854Rと揺動軸Kとの距離をより大きくすることで現像側係合部1854Rの移動量を大きくすることができ、現像側係合部1854Rとドラム側係合部1855Rとの係合を解除するのに必要な現像ユニット1809の回転量を減らすことができる。離間制御部材196Rは第一位置に移動後、W41方向へ移動しホーム位置へ戻る。この時、移動部材1852Rは引張りばね1853によってCB方向へ回転し、移動部材1852Rの第一押圧面1852Rqと現像カバー部材1828の第一押圧面1828kが当接した状態へ移行する(図175の状態)。これによって隙間T3とT4が形成され、移動部材1852Rに対して離間制御部材196Rが作用しない位置に位置する。尚、図174の状態から図175の状態への遷移は時間を置かずに行われる。
以上のように本実施例構成では、離間制御部材196Rがホーム位置から第一位置に移動することで、移動部材1852Rを回転させ、さらには移動部材が現像カバー部材に当接することで現像ユニット1809を回転させることで、現像側係合部1854Rとドラム側係合部1855Rを許容位置(第2位置)へ移動させ、こられの係合を解除する。これによって現像ユニット1809が離間位置から現像ローラ106と感光ドラム104が当接する当接位置まで移動することが可能となる。尚、図175の離間制御部材196Rの位置は図171の状態と同じである。
ここで、前述した現像ユニット1809が離間状態から当接状態に遷移する過程で発生するトルクおよび力の大きさがどのように設計されているか説明する。図171に示すように、プロセスカートリッジ1800を長手方向駆動側からみたときに揺動軸Kと、現像側係合面1854Rcとドラム側係合面1855Rcとの接点を結んだ線分Yの長さをL,線分Yと前述した方向Uとのなす角をθとする。前述したTr1、Tr2、Faの関係をLおよびθを用いて表すと以下の式1、2が成り立つように設計されている。
Tr1/Lsinθ<Fa・・・式1
(Tr1+Tr2MAX)/Lsinθ>Fa・・・式2
[現像ユニットの離間動作]
Tr1/Lsinθ<Fa・・・式1
(Tr1+Tr2MAX)/Lsinθ>Fa・・・式2
[現像ユニットの離間動作]
次に、離間当接機構1850Rによる、現像ユニット1809の当接位置から離間位置へ移動する動作について、図171、図175~図178を用いて詳細に説明する。
本実施例における離間制御部材196Rはホーム位置から図175の矢印W41方向に移動可能に構成されている。離間制御部材196RがW41方向に移動すると、第一力付与面196Rbと移動部材1852Rの第一力受け面1852Rmが当接し、移動部材1852Rが支持受け部1852Raを回転中心としてCB方向へ回転する。そして移動部材1852Rの第一押圧面(不図示)が現像カバー部材1828の第一押圧面(不図示)と当接することで、現像ユニット1809は当接位置からV1方向へ回転する。現像ユニット1809がV1方向へ回転することで、現像側係合部1854RがU2方向へ移動し、現像側係合復帰面1855Rdとドラム側係合復帰面1854Rdとが接触する。さらに、離間制御部材196Rが41方向へ移動することで現像ユニット1809には揺動軸Kを中心としてV1方向のトルクが発生する。このV1方向へのトルクの大きさをTr3、本体が発生可能な最大値をTr3MAXとする。Tr3MAXは、Tr3MAX>Tr1となるように設計されているため、現像ユニット1809はV1方向に回転する。
次に、図175~図178を用いて先述した離間制御部材196RがW41方向に移動し、現像ユニット1809にV1方向へ回転したときの現像側係合部1854Rおよびドラム側係合部1855Rに発生する力および各構成部の挙動を説明する。現像ユニット1809がV1方向へ回転すると、現像側係合部1854RはU2方向に移動する。現像側係合部1854RがU2方向に移動すると現像側係合復帰面1854Rcとドラム側係合復帰面1855Rcとが接触するように構成される。このとき、図176に示すように現像側係合復帰面1854Rdとドラム側係合復帰面1855Rdとの間に発生する垂直抗力のうち現像側係合復帰面1854Rdに加わる垂直抗力を垂直抗力N2、ドラム側係合面1854Rdに加わる垂直抗力を垂直抗力N2′とする。垂直抗力N2は、現像側係合爪1854Raが支点Sを中心に図176中で反時計方向に回転するように現像側保持部1854Rbが撓む(弾性変形する)ように発生する。垂直抗力N2′はドラム側係合爪1855Raが支点S′を中心に図176中で反時計方向に回転させる方向にドラム側保持部1855Rbを撓む(弾性変形する)ように発生する。即ち、現像側保持部1854Rbは方向J1、ドラム側保持部1855Rbは方向J2に撓む。そして、現像側係合部1854RがU1方向に一定の力を受けU2方向へ移動すると、現像側係合復帰面1854Rdとドラム側係合復帰面1855Rdとが接触しなくなるまで現像側保持部1854Rbおよびドラム側保持部1855Rbが撓む。この状態は、スペーサを構成する現像側係合部1854R及びドラム側係合部1855Rは、それぞれ許容位置(第2位置、係合解除位置)にあると言える。この現像側係合部1854RがU2方向に受ける一定の力をFbとする。
さらに、現像側係合部1854RがU2方向に進むことで図177に示すように現像側保持部1854Rbおよびドラム側係合部1855Rbの撓みが解放されるとともに現像側係合面1854Rcとドラム側係合面1855Rcが対向した状態となる。つまり、現像側係合部1854Rとドラム側係合部1855Rが係合する。このとき、離間制御部材196RはW42方向に現像側係合面1854Rcとドラム側係合面1855Rcの間に間隙が形成されるまでW41方向に移動することで、現像側係合部1854Rとドラム側係合部1855Rが確実に係合する。離間制御部材196Rの移動後の位置(図178)を第二位置とする。離間制御部材196Rは第二位置へ移動後、W42方向へ移動しホーム位置へ戻る。この時、現像ユニット1809Rは現像加圧ばね134によってV2方向に回転し、現像側係合面1854Rcとドラム側係合面1855Rcとが接触する(図171の状態)。この時、スペーサを構成する現像側係合部1854R及びドラム側係合部1855Rがそれぞれ規制位置(第1位置、係合位置)にあると言える。この時隙間T3と隙間T4が形成され、移動部材1852Rに対して離間制御部材196Rが作用しない位置に位置する。尚、図178の状態から図171の状態への遷移は時間を置かずに行われる。
以上のように本実施例では、離間制御部材196Rがホーム位置から第二位置に移動することで、現像側係合部1854RがU2方向に移動し、現像側係合部1854Rとドラム側係合部1855Rとが係合する。そして、離間制御部材196Rが第二位置からホーム位置に戻ることで、現像側係合面1854Rcとドラム側係合面1855Rcが接触し、現像ユニット1809はスペーサ(現像側係合部1854Rおよび現像側係合部1854R)によって離間位置(退避位置)を維持する状態になる。
ここで、前述した現像ユニット1809が当接状態から離間状態に遷移する過程で発生するトルクおよび力の大きさがどのように設計されているか説明する。図175に示すように、プロセスカートリッジ1800を長手方向駆動側からみたときに揺動軸Kと、現像側係合面1854Rcとドラム側係合面1855Rcとの接点を結んだ線分Y′の長さをL′,線分Y′と前述した方向Uとのなす角をθ′とする。前述したTr1、Tr3、Fbの関係をL′およびθ′を用いて表すと以下の式3が成り立つように設計されている。
(Tr3MAX−Tr1)/L′sinθ′≧Fb・・・式3
(Tr3MAX−Tr1)/L′sinθ′≧Fb・・・式3
本実施例では現像ユニット1809を退避位置(離間位置)から現像位置(当接位置)へ移動させる際、及び、現像位置(当接位置)から退避位置(離間位置)へ移動させる際に、現像側保持部1854Rbとドラム側保持部1855Rbの双方が弾性変形する構成であったが、少なくともいずれか一方が撓む(弾性変形)する構成であっても良い。現像側保持部1854Rbとドラム側保持部1855Rbの一方のみが撓む(弾性変形)場合も、この撓んだ状態は、スペーサを構成する現像側係合部1854Rおよび現像側係合部1854Rが許容位置(第2位置、係合解除位置)にあると言える。
また、本実施例では現像側係合部1854Rと現像側係合部1854Rとがスナップフィット構成によって係合及び係合解除する構成であったが、これらをマグネットなどの磁力を用いる構成や面ファスナー構成によって係合及び係合解除する構成であっても良い。
以上説明したように、本実施例によれば実施例1、9と同様な効果が得られる。
また、実施例1等では、スペーサは現像枠体もしくはドラム枠体の一方に移動可能に支持する必要があったが、本実施例はスペーサを構成する部材が撓む(弾性変形する)ように支持すれば良いため、その分構成を簡易化することができる。更に、本実施例にように現像枠体やドラム枠体を構成する部材に一体的に形成することで、組み立て性の向上や部品点数削減によってプロセスカートリッジ1800をコストダウンすることができる。
本発明の実施例18に係るプロセスカートリッジ、画像形成装置の実施形態について、図179、図180、図181を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
本実施例は、力受け部(第1の力受け部、当接力受け部)2033eを現像カバー部材2033が有し、退避力受け部(第2の力受け部、離間力受け部)2010mをスペーサ2010が有する構成である。以下詳細を説明する。
図181は駆動側カートリッジカバー2020の単品の斜視図である。本実施例の駆動側カートリッジカバー2020は、変形部2020fを有する。変形部2020fは、腕部2020e、第一被当接面2020c、第三被当接面2020dで構成される。腕2020eは、一端が感光ドラム4を支持する支持穴2020bを形成する円筒部の外周面に固定され、現像ユニット9が支持される支持穴2020a側に伸びる。そして、他端に第一被当接面2020cと第三被当接面2020dが配置されている。つまり、変形部2020fは、一端が固定される片持ち梁形状になっていて、腕2020eが変形することで、他端側の第一被当接面2020cと第三被当接面2020dが略重力方向である図181中矢印Z2方向に上下移動が可能に構成されている。ここで、図181(a)に示すように、腕2020eの変形がない状態を変形部2020fの維持状態とする。また、図181(b)に示すように、腕2020eが変形し、第一被当接面2020cと第三被当接面2020dが上記維持状態よりも、図181中矢印Z2方向(重力方向下方向)に移動した状態を変形部2020fの許容状態とする。変形部2020fの維持状態と許容状態の詳細は後述する。
図179、図180は、実施例9の図2と同様に画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー2020は変形部2020fの腕2020e、第一被当接面2020c、第三被当接面2020d以外を省略して示す。
図179(a)に、スペーサ2010が許容位置(第2位置)、現像ユニット9が現像位置(当接位置)で離間制御部材540がホーム位置の状態を示す。図179(b)、図179(c)に、離間制御部材540がホーム位置から第二位置に移動し、スペーサ2010が許容位置(第2位置)から規制位置(第1位置)に、現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する途中の状態を示す。図179(d)に、スペーサ2010が規制位置(第1位置)、現像ユニット9が退避位置(離間位置)で離間制御部材540がホーム位置の状態を示す。
本実施例のスペーサ(規制部材、間隔保持部材、保持部材)2010は実施例9と同様で図179(a)に示すように、被支持穴(第二当接部)2010a、突出部(保持部)2010b、第一当接面(当接部)2010c、を有する。被支持穴(第二当接部)2010aが、現像カバー部材2033が有する軸である支持部2033cに回転可能に支持されている。また、スペーサ2010は、引っ張りばね530(付勢手段)によって、図179(a)中矢印B1方向に付勢される。また、スペーサ2010は、実施例10と同様の退避力受け部(第2の力受け部、離間力受け部)2010mを有している。退避力受け部2010mは、図179(a)矢印Z2方向に突出した形状である。
本実施例の現像カバー部材2033は、実施例9と同様に現像ユニット9に固定される。この現像カバー部材2033に設けられる力受け部2033eは、退避力受け部2010mと同様に図179(a)矢印Z2方向に突出した形状である。
本実施例の離間制御部材540は、実施例9と同様に画像形成装置本体502が有する。図179(a)に示すように、図179(a)中矢印W51方向において、力受け部2033e、離間制御部材540、退避力受け部2010mの順に配置される。実施例9と同様に、離間制御部材540は第一位置と第二位置とを移動可能である。さらに、離間制御部材540は第一位置と第二位置の間で、力受け部2033eと退避力受け部2010mとに接触しないホーム位置に移動可能に構成されている。
[離間動作]
[離間動作]
まず、図179を用いて、現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する動作について説明する。離間制御部材540が図179(a)に示すホーム位置から、第二位置へ向かう方向である図179(a)中矢印W51方向に移動すると、第一力付与面540bとスペーサ2010の退避力受け部2010mが当接し、第一力付与面540bは退避力受け部2010mを押圧する。退避力受け部2010mが押圧されたスペーサ2010は、許容位置から規制位置に向かう方向である図179(b)中矢印B1方向に回転しながら、第三当接面2010kが維持状態の変形部2020fの第三被当接面2020dを図179(b)中矢印N6方向に押圧する。そして、第三被当接面2020dが押圧された変形部2020fは、腕2020eが変形し、第一被当接面2020cと第三被当接面2020dが図179(b)中矢印Z2方向に移動し、維持状態から片持ち梁が撓んだ(弾性変形した)状態の許容状態になる(図179(b)の状態)。図179(b)に示すように、変形部が維持状態から許容状態になるとき、現像ユニット9は図179(b)中矢印V1方向に回転し、現像位置から退避位置へと移動可能になる。
さらに、図179(c)に示すように、離間制御部材540が第二位置まで移動すると、スペーサ2010と変形部2020fは離れるため、変形部2020fは弾性力によって許容状態から維持状態へと戻る。
さらに、離間制御部材540が第二位置から図179(c)中矢印W52方向に移動し、再びホーム位置に戻ると、離間制御部材540とスペーサ2010が離れて、現像ユニット9は、現像カップリング部材74が受ける駆動力によって図179(c)中矢印V2方向に回転する。そして、規制位置(第1位置)に位置するスペーサ2010の第一当接面(当接部)2010cと、維持状態の変形部2020fの第一被当接面(被当接部)2020cとが当接し、現像ユニット9の姿勢は退避位置(離間位置)で維持される。(図179(d)に示す状態)。
図179(d)に示すように、ホーム位置に位置する離間制御部材540はスペーサ2010と離れるため、離間制御部材540には現像ユニット9からの負荷がかからない。
以上のように、離間制御部材540がホーム位置から第二位置に移動し、再びホーム位置に戻る動作により、現像ユニット9を現像位置(当接位置)から退避位置(離間位置)に移動させることができる。
[当接動作]
[当接動作]
次に、図180を用いて、現像ユニット9が退避位置(離間位置)から現像位置(当接位置)に移動する動作について説明する。
図180(a)に、スペーサ2010が規制位置(第1位置)、現像ユニット9が退避位置(離間位置)で離間制御部材540がホーム位置に位置する状態を示す。図180(b)、図180(c)に、離間制御部材540がホーム位置から第一位置方向に移動し現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図180(d)に、スペーサ2010が許容位置(第2位置)、現像ユニット9が現像位置(当接位置)で離間制御部材540がホーム位置に位置する状態を示す。
離間制御部材540がホーム位置から、第一位置方向である図180(a)中矢印W52方向に移動すると、離間制御部材540の第二力付与面540cと現像カバー部材2033の力受け部2033eが当接する(図180(b)の状態)。さらに、離間制御部材540が第一位置方向に移動すると、第一当接面2010cが第一被当接面2020cに与える図180(b)中矢印N7方向の力が増加する。すると、この力によって、腕2020eが変形して第一被当接面2020cと第三被当接面2020dは図180(b)中矢印Z2方向に移動する。つまり、変形部2020fは撓んで(弾性変形して)維持状態から許容状態へ移行する。(図180(c)の状態)
図180(c)の状態から、さらに、離間制御部材540が図180(c)中矢印W52方向に移動すると、現像ユニット9は、力受け部2033eが第二力付与面540cから受ける力によって、図180(c)中矢印V2方向に回転し、退避位置から現像位置へと移動する。このとき、第三被当接面2020dがスペーサ2010の第三当接面2010kと接触しながら、変形部2020fが弾性力によって許容状態から維持状態に戻る。同時に、第三当接面2010kに反力を受けるスペーサ2010は、現像ユニット9に対して相対的に、図180(c)中矢印B2方向に回転し、スペーサ2010の位相が規制位置(第1位置)から許容位置(第2位置)へと変化する。
離間制御部材540は、ホーム位置から第二位置まで移動し現像ユニット9の姿勢を退避位置から現像位置に移動させた後、図180(d)中矢印W52方向に移動し再びホーム位置に戻る。
図180(d)に示すように、ホーム位置に位置する離間制御部材540は力受け部2033eと離れるため、離間制御部材540には現像ユニット9からの負荷がかからない。
以上のように、離間制御部材540がホーム位置から第一位置に移動し、再びホーム位置に戻る動作により、現像ユニット9は退避位置から現像位置へと移動させることができる。
また、本実施例では、変形部2020fを梁形状で説明したが、これに限られるものではない。梁形状とは別の形状が変形し、第一被当接面2020cと、第三被当接面2020dが、現像ユニット9が回転可能になる許容状態と、現像ユニット9が退避位置及び現像位置で姿勢維持される維持状態とを移動可能な構成でもよい。変形部2020fは、スペーサ2010が規制位置と許容位置との間を移動可能となるよう駆動側カートリッジカバー2020に対して許容状態と維持状態との間を移動する構成である。このため、変形部2020fをドラムユニット側のスペーサであると言うことも可能である。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また本実施例では、現像ユニット9に固定される現像カバー部材2033に力受け部2033eを設け、スペーサ2010に退避力受け部2010mを設けた構成であり、安定して現像ユニット9の姿勢の制御を行うことができる。
本発明の実施例19に係るプロセスカートリッジ、画像形成装置の実施形態について、図182を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
本実施例は、力受け部(第1の力受け部、当接力受け部)2133eと退避力受け部(第2の力受け部、離間力受け部)2133mを現像ユニット9に固定される現像カバー部材2133が有する構成である。
また、本実施例の駆動側カートリッジカバー2020は実施例18と同様で、変形部2020fを有する構成である。
図182は、実施例9の図2と同様に、画像形成装置本体502の内部で第二内側位置に位置するプロセスカートリッジPを駆動側から見た図である。説明のため、駆動側カートリッジカバー2020は変形部2020fの腕2020e、第一被当接面2020c、第三被当接面2020d以外を省略して示す。
図182(a)に、スペーサ2110が許容位置(第2位置)、現像ユニット9が現像位置(当接位置)で離間制御部材540がホーム位置の状態を示す。図182(b)、図182(c)に、離間制御部材540がホーム位置から第二位置に移動し現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する途中の状態を示す。図182(d)に、スペーサ2110が規制位置(第1位置)、現像ユニット9が退避位置(離間位置)で離間制御部材540がホーム位置の状態を示す。
図182(a)に示すように、本実施例のスペーサ(規制部材、保持部材、離間保持部材)2110は実施例9と同様に被支持穴(第二当接部)2110a、突出部(保持部)2110b、第一当接面(当接部)2110cを有する。被支持穴2110aは現像カバー部材2133が有する軸である支持部2133cに回転可能に支持され、スペーサ2110は引っ張りばね530(付勢手段)によって、図182(a)中矢印B1方向に付勢される。
また、本実施例の現像カバー部材2133は、実施例9と同様に現像ユニット9に固定される。この現像カバー部材2133は実施例21と同様の力受け部2133eを有し、さらに、退避力受け部2133mも有している。退避力受け部2133mは力受け部2133eと同様に、図182(a)矢印Z2方向に突出した形状である。
本実施例の離間制御部材540は、実施例9と同様に画像形成装置本体502が有する。図182(a)に示すように、離間制御部材540は突出する力受け部2133eと退避力受け部2133mの間(図182(a)中矢印W51、W52方向)に配置される。
実施例9と同様に、離間制御部材540は第一位置と第二位置とを移動可能である。さらに、離間制御部材540は第一位置と第二位置の間で、力受け部2133eと退避力受け部2133mに接触しないホーム位置に移動可能に構成されている。
[離間動作]
[離間動作]
図182を用いて、現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する動作について説明する。
離間制御部材540が図182(a)に示すホーム位置から、第二位置方向である図182(a)中矢印W51方向に移動すると、第一力付与面540bと退避力受け部2133mが当接し、第一力付与面540bは退避力受け部2133mを押圧する。退避力受け部2133mが押圧されると、現像ユニット9は現像位置から退避位置へと図182(a)中矢印V1方向に回転移動する。このとき、スペーサ2110の第三当接面2110kと第三被当接面2020dが接触することで、スペーサ2110の姿勢が規制されている。
さらに、離間制御部材540が図182(b)中矢印W51方向に移動し第二位置まで移動すると、第三当接面2110kと第三被当接面2020dが離れ、スペーサ2110は引っ張りばね530の付勢力により、許容位置(第2位置)から規制位置(第1位置)に回転する。(図182(c)の状態)
離間制御部材540が第二位置から図182(c)中矢印W52方向に移動し、再びホーム位置に戻ると、現像ユニット9は、現像カップリング部材が受ける駆動力によって図182(c)中矢印V2方向に回転移動する。そして、規制位置に位置するスペーサ2110の第一当接面(当接部)2110cと、維持状態の変形部2020fの第一被当接面(被当接部)2020cとが当接し、現像ユニット9の姿勢は退避位置で維持される。(図182(d)に示す状態)。
離間制御部材540が第二位置から図182(c)中矢印W52方向に移動し、再びホーム位置に戻ると、現像ユニット9は、現像カップリング部材が受ける駆動力によって図182(c)中矢印V2方向に回転移動する。そして、規制位置に位置するスペーサ2110の第一当接面(当接部)2110cと、維持状態の変形部2020fの第一被当接面(被当接部)2020cとが当接し、現像ユニット9の姿勢は退避位置で維持される。(図182(d)に示す状態)。
図182(d)に示すように、ホーム位置に位置する離間制御部材540はスペーサ2110と離れるため、離間制御部材540には現像ユニット9からの負荷がかからない。
以上のように、離間制御部材540がホーム位置から第二位置に移動し、再びホーム位置に戻る動作により、現像ユニット9を現像位置から退避位置に移動させることができる。
本実施例では、現像ユニット9が現像位置から退避位置に移動する際に、変形部2020fは維持状態から許容状態へ変化しない。一方で、現像ユニット9が退避位置から現像位置へ移動する際は、上述した実施例18と同様に、変形部2020fの維持状態と許容状態への変化を伴う。
また、本実施例では、変形部2020fを梁形状で説明したが、これに限られるものではない。梁形状とは別の形状が変形し、第一被当接面2020cと、第三被当接面2020dが、現像ユニット9が回転可能になる許容状態と、現像ユニット9が退避位置と現像位置で姿勢維持される維持状態とを移動可能な構成でもよい。
変形部2020fは、スペーサ2110が規制位置と許容位置との間を移動可能となるよう駆動側カートリッジカバー2020に対して許容状態と維持状態との間を移動する構成である。このため、変形部2020fをドラムユニット側のスペーサであると言うことも可能である。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また本実施例では、現像ユニット9に固定される現像カバー部材2133が力受け部(第1の力受け部、当接力受け部)2133eと退避力受け部(第2の力受け部、離間力受け部)2133mを有する構成で、安定して現像ユニット9の姿勢の制御を行うことができる。
本発明の実施例22に係るプロセスカートリッジ、画像形成装置の実施形態について、図183~図191を用いて説明する。
本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
[構成部品]
[構成部品]
はじめに、本実施例における各部品の構成について説明する。
レバー22510は力受け部(第1の力受け部、当接力受け部)22510eと退避力受け部(第2の力受け部、離間力受け部)22510aを有している。また、レバー22510は、被支持穴22510dで、現像枠体の一部である現像カバー部材2233に設けられた支持軸2233bにより支持され、回動可能に取り付けられている。また、レバー22510には突き当て部22510bが設けられている。
現像カバー部材2233にはストッパー部2233aが一体的に設けられている。突き当て部22510bと突き当たることでレバー22510の時計回り(V4方向)及び反時計回り(V3方向)の回転を規制する。
[ばね]
[ばね]
ドラムユニット2208と現像ユニット2209の間に引張ばね(離間方向付勢部材)22541と引張ばね(当接方向付勢部材)22542が取り付けられている。引張ばね22541の一端側フック部22541bは、ドラムユニット2208のドラム枠体の一部であるボス2208bに取り付けられており、引張ばね22541の他端側フック部22541aは、現像ユニット2209の現像枠体の一部であるボス2209aに取り付けられている。引張ばね22541によって現像ユニット2209には揺動軸Kを中心とした反時計回りのモーメント(V1方向)が働く。次に引張ばね22542について説明する。
引張ばね22542の一端側フック部22542bは、ドラムユニット2208のドラム枠体の一部であるボス2208cに取り付けられている。引張ばね22542の他端側フック部22542aは、レバー22510の長穴22510c内をスライド可能な軸部材22511に取り付けられている。軸部材22511は現像ローラ回転軸線M2方向と平行な方向に移動を規制されており、長穴22510cの長手方向にのみスライド可能である。この引張ばね22542によって、現像ユニット2209には揺動軸Kを中心とした時計回りのモーメント(V2方向)を働かせることが可能である。
[動作概略]
[動作概略]
次に、本実施例の動作概略について図184(a)、(b)を用いて説明する。図184(a)の状態の時、プロセスカートリッジ単体の状態において現像ユニット2209がドラムユニット2208に対し、引張ばね22541の付勢力によって退避位置(離間位置)にある状態である。このとき、引張ばね22541で生じるモーメントM1’よりも引張ばね22542で生じるモーメントM2’が小さい。更に、現像ユニット2209の突き当て部2209bとドラムユニット2208の突き当て部2208dが当接し、現像ユニット2209の矢印V1方向への回動が規制された状態となっている。このため、ドラムユニット2208は現像ユニット2209を退避位置(離間位置)で安定的に保持していると言える。この時、保持部を構成するレバー22510と引張ばね22542は、ドラムユニット2208が現像ユニット2209を退避位置(離間位置)で安定的に保持するための第1位置にあるとする。
実施例1で示すように、離間制御部材22540はホーム位置から第1位置(矢印W52の方向)に移動し、再度ホーム位置に戻る。これにより、レバー22510は回転中心22510dを中心に回転し、第2の位置に移動する(図183(b))。この動作により引張ばね22542の他端側フック22542a及び軸部材2251の長穴22510cの相対的な位置が変化し、揺動軸中心Kから軸部材22511までの距離が大きくなる(L1、L2’参照)。このとき引張ばね22541で生じるモーメントM1よりも引張ばね22542で生じるモーメントM2が大きくなる。これにより、現像ユニット2209は退避位置(図184(a))から現像位置(図184(b))へ移動する。この時、現像ローラ106と感光ドラム104が当接し、現像ユニット2209の矢印V2方向への回動が規制された状態となっている。このため、ドラムユニット2208は現像ユニット2209を現像位置(当接位置)で安定的に保持していると言える。この時、保持部を構成するレバー22510と引張ばね22542は、ドラムユニット2208が現像ユニット2209を現像位置(当接位置)で安定的に保持するための第2位置にあるとする。
[当接動作]
[当接動作]
次に、図185~図187を用いて現像ユニット2209が退避位置(離間位置)から現像位置(当接位置)へ移動する動作詳細ついて説明する。まず、離間制御部材22540は図185(a)で示すように矢印W52方向に移動する。次に離間制御部材22540は力受け部受(第1の力受け部、当接力受け部)22510eと当接し押圧しながら、更に矢印W52方向に移動し、現像ユニット2209は揺動軸Kを中心に矢印V2方向(退避位置から現像位置へ向かう方向)に回動する。そして、現像ローラ106が感光ドラム104に当接することで、現像ユニット2209が現像位置で位置が決まり、回動が停止する。
更に離間制御部材22540は矢印W52方向への移動を続けると、次にレバー22510は力受部22510eのW52方向への移動に伴い、回動中心22510dを中心にV4方向(第1位置から第2位置に向かう方向)に回転する。更に回転を続けて長穴22510cの中心軸線と引張ばね22542のコイル中心軸線とがなす角(図186(a)で示すθ)が90°を超えると、引張ばね22542の他端に接続された軸部材22511は、レバー22510の長丸穴22510cの中を矢印W53方向にスライドする。そして、軸部材22511の中心とボス2208cの中心を結ぶ線が中立点(この場合回動中心2510d)を越えるとレバー22510が引張ばね22542の引張力によって矢印V4方向に回転する。最終的に図186(b)で示すようにレバー22510の突き当て部22510bの第1突き当て部22510b1はストッパー部2233aの第1ストッパー部2233a1と突き当たる。これにより、レバー22510の矢印V4方向の回転が止まり、第2位置で位置が決まる。また、軸部材22511は長穴22510cの端部22510fで突き当たることで位置が決まり、引張ばね22542の引張力が現像ユニット2209に作用するようになる。詳細は後述するが、この状態において、回動軸Kを中心とする回転モーメントは、引張ばね22541で発生する回転モーメントM1よりも、引張ばね22542で発生する回転モーメントM2の方が大きい為、現像ユニット2209は現像位置(当接位置)を維持することが出来る。
次に離間制御部材22540は矢印W51方向に移動する。そして、離間制御部材22540及びレバー22510と接しない位置(ホームポジション)に戻り、現像ユニット2209の退避位置から現像位置への移動が完了する。
[離間動作]
[離間動作]
次に、現像位置(当接位置)から退避位置(離間位置)への動作について説明する。図188(a)で示すように、現像ユニットが現像位置にあるとき離間制御部材22540が矢印W51方向に移動を開始する。
そして制御部材22540の第一力付与面22540bがレバー22510の退避力受け部(第2の力受け部、離間力受け部)22510aと当接して押圧することで、現像ユニット2209は矢印V1方向(現像位置から退避位置へ向かう方向)に回動し始める。図188(b)で示すように現像ユニット2209の突き当て部2209bとドラムユニット2208の突き当て部2208dが当接すると、現像ユニット2209の矢印V1方向への回動が規制され、現像ユニット2209は退避位置で位置が決まる。
そして、図189(a)で示すように、更に離間制御部材22510が矢印W51方向に移動を続けると、退避力受け部22510aが更に押圧されてレバー22510が回動中心22510dを中心に矢印V3方向(第2位置から第1位置に向かう方向)に回転する。そして、他端フック22542aが接続された軸部材2251は、長丸穴22510c内を矢印W53方向にスライドする。更に離間制御部材22510が矢印W51方向に移動すると、引張ばね22542の位置が軸部材22511の中心とボス2208cの中心を結ぶ線が中立点(この場合回動中心2510d)を越える。図189(b)で示すように、中立点を通過した後、引張ばね22542の引張力によって、軸部材22511は長丸穴22510c内を更に矢印W53方向に移動する。長丸穴22510cの上端に軸部材22511が突き当たってW53方向の移動が停止すると、レバー22510は引張ばね22542の力によって矢印V3方向に回転する。
そして、図190(a)で示すように、最終的にはレバー22510は突き当て部22510bの第2突き当て部22510b2はストッパー部2233aの第2ストッパー部2233a2に突き当たる。これにより、現像カバー部材2233に対してのレバー22510の回転が止まり、第1位置で位置が決まる。詳細は後述するが、この状態において引張ばね22542と揺動軸Kの距離が引張ばね22541と揺動軸Kとの距離よりも近いため、矢印V2方向の回転モーメントM2’は現像位置での回転モーメントより減少している。そして、引張ばね22541で発生するV1方向の回転モーメントM1’よりも小さくなるため退避位置(離間位置)の姿勢を維持する事が可能となる。そして図190(b)で示すように、離間制御部材は矢印W52方向に移動し、離間制御部材22540及びレバー22510と接しない位置(ホームポジション)まで戻り、退避位置への移動動作が完了する。
[力の関係]
[力の関係]
次に、図191(a)、(b)を用いて、現像ユニット2209が現像位置及び退避位置にあるときに、現像ユニットに作用する力の関係を説明する。図191(a)は現像位置において現像ユニット2209に作用する力を示した図であり、図191(b)は退避位置において、現像ユニット2209に作用する力を示した図である。ここで、現像位置における矢印V1、V2の方向にはたらくモーメントを夫々、M1、M2とし、退避位置における揺動軸Kを中心に矢印V1、V2の方向にはたらくモーメントを夫々、M1’、M2’とする。また、現像位置における揺動中心Kからボス2209aまでの距離をL1、揺動中心Kから軸部材22511までの距離をL2とし、退避位置における揺動中心Kから軸部材22511までの距離をL2‘とする。
まず、図191(a)を用いて現像位置における力の関係を説明する。揺動軸Kを中心にモーメントの釣り合いを考えた場合、引張ばね22541によって発生するモーメントM1は、M1=F1・L1で示される。引張ばね22542によって発生するモーメントM2は、M2=F2・L2で示される。ただし、現像位置における、回転中心Kとボス2209aの間の距離をL1、回転中心Kとボス2208cとF1の間の距離をL2とする。また、ボス2209aが引張ばね22541から受ける力のうち回転中心Kを中心としてボス2209aを通る円の接線方向の力をF1、ボス2208cが引張ばね22542から受ける力のうち回転中心Kを中心としてボス2208cを通る円の接線方向の力をF2とする。
ここで、現像位置で姿勢を維持(安定的に保持)するために、以下の式1を満たすようにM2、M1を設定している。
M2>M1−−−式1
M2>M1−−−式1
次に、図191(b)を用いて退避位置における力の関係を説明する。
矢印V1、V2の方向にはたらくモーメントを夫々、M1’、M2’,とすると、前述同様、揺動軸Kを中心にモーメントの釣り合いを考えた場合、引張ばね22541によって発生するモーメントM1’は、M1’=F1’・L1で示される。引張ばね22542によって発生するモーメントM2’は、M2‘=F2’・L2’で示される。ただし、退避位置における、回転中心Kとボス2209aの間の距離をL1’、回転中心Kとボス2208cとF1の間の距離をL2’とする。また、ボス2209aが引張ばね22541から受ける力のうち回転中心Kを中心としてボス2209aを通る円の接線方向の力をF1’、ボス2208cが引張ばね22542から受ける力のうち回転中心Kを中心としてボス2208cを通る円の接線方向の力をF2’とする。
ここで、退避位置で姿勢を維持(安定的に保持)するために、以下の式2を満たすようにM1’、M2’を設定している。
M2’<M1’−−−式2
また、退避位置においては、式2を満たせば良いので、引張ばね22542の付勢力F2’は0(ゼロ)でも良い。
[保持機構]
M2’<M1’−−−式2
また、退避位置においては、式2を満たせば良いので、引張ばね22542の付勢力F2’は0(ゼロ)でも良い。
[保持機構]
上述した実施例においては、ドラムユニット2208が現像ユニット2209を退避位置と現像位置とでそれぞれ安定的に保持するための構成が、第1位置と第2位置をとることが可能なレバー22510及び引張りバネ22542を保持部であるとして説明した。しかしながら、本実施例の構成を次のように見ることも可能である。即ち、ドラムユニット2208が現像ユニット2209を退避位置と現像位置とでそれぞれ安定的に保持する保持機構として、少なくとも、レバー22510、引張りバネ22542、ボス2208c、軸部材22511、引張ばね22541、ボス2208b、ボス2209a、を挙げることも可能である。この場合、レバー22510、引張りバネ22542が第1位置をとり現像ユニット2209が退避位置にある時は保持機構が第1状態にあり、レバー22510、引張りバネ22542が第2位置をとり現像ユニット2209が現像位置にある時は保持機構が第2状態にあると言える。
以上説明したように、本実施例においては、現像ユニット2209を引張ばね22541によって、現像位置から退避位置に向かう方向に常時付勢している。そして、保持部としてのレバー22510と引張ばね22542の位置を変更することで、引張ばね22542の付勢力による現像ユニット2209に発生するモーメントの大きさを変更し、現像位置と退避位置との間を移動させる。このような構成によっても、ドラムユニットは現像ユニットを現像位置と退避位置のそれぞれで安定的に保持することができる。このため実施例1、9と同様の効果を得ることができる。
また、本実施例においては、現像ユニット2209は、現像位置にある時でも引張ばね22541によるモーメントで退避位置に向かう方向に付勢されているが、引張ばね22542によるモーメントにより、現像ローラ106を感光ドラム104に向かって付勢して現像ユニット2209の位置を決めることができる。このため、適切な圧力で現像ローラ106を感光ドラム104に当接させることができる。
本発明の実施例21に係るプロセスカートリッジ、画像形成装置の実施形態について、図192~図194を用いて説明する。本実施例では、前述した実施例と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
図192、図194は、画像形成装置本体502の内部でプロセスカートリッジPを駆動側から見た図である。付勢部材2410は、現像ユニット9が現像位置に安定的に保持するための現像保持位置(第1位置)と、現像ユニット9を退避位置に安定的に保持するための離間保持位置(第2位置)との間を移動可能な保持部である。
尚、本実施例において、付勢部材(規制部材、保持部材、離間保持部材)2410はドラムユニット8と現像ユニット9との間に配置される圧縮コイルばねである。付勢部材2410は一端部が座巻形状部2410bであり、他端部はフック形状部2410cである。
ドラムユニット8には付勢部材2410の一端部である座巻形状部2410bを支持するためのドラム枠体の一部として付勢部材支持部2481が設けられている。付勢部材支持部2481には座巻形状部2410bが着座するための付勢部材着座部2481bと付勢部材2410のコイル部外径側を支持するための付勢部材外径支持部2481cを有する。付勢部材2410の一端側は付勢部材着座部2481bと付勢部材外径支持部2481cにより支持されることにより、付勢部材着座部2481bの略法線方向に略直線的に支持されている。
ここで、付勢部材2410の一端部である座巻形状部2410bが着座する付勢部材着座部2481bの法線であって、現像ユニット9の揺動軸Kを通る直線を直線L80とする。
次に、現像ユニット9に設置された現像カバー部材(現像枠体の一部)2433には、フック形状部2410cを支持するための円柱形状であるばね掛け部2433cを有している。付勢部材2410は一端側をドラムユニット8で支持されており、他端側のフック形状部2410cを現像ユニット9のばね掛け部2433cと係合して支持されている。付勢部材2410は圧縮コイルばねであり、ドラムユニット8と現像ユニット9との間で圧縮された状態で設置されている。
本実施例において、現像カバー部材2433は画像形成装置本体502に設置される離間制御部材2440と係合するための力受け部(第1の力受け部、当接力受け部)2433e、退避力受け部(第2の力受け部、離間力受け部)2433mを有している。
離間制御部材2440は、付勢部材2410を当接保持位置に移動させる第一位置、付勢部材2410を離間保持位置に移動させる第二位置との間を移動可能である。さらに、離間制御部材2440は第一位置と第二位置の間で、離間制御部材2440が力受け部2433eと退避力受け部2433mとに接触しないホーム位置に移動可能に構成される。
次に、付勢部材2410が、現像ユニット9を現像位置(当接位置)に保持するための当接保持位置(第2位置)と、現像ユニット9を退避位置(離間位置)に保持するための離間保持位置(第1位置)との間を移動する様子について説明する。図192(a)は現像ユニット9が現像位置であり、離間制御部材2440が第一位置の状態である。図192(c)は現像ユニット9が離間位置であり、離間制御部材2440が第二位置の状態である。図192(b)は現像ユニット9が図192(a)に示す現像位置から図192(c)に示す離間位置に切り替わる途中の状態である。図192(d)は現像ユニット9が離間位置であり、離間制御部材2440がホーム位置の状態である。
図192(a)は現像ユニット9が現像位置であり、ばね掛け部2433cは直線L80よりも矢印V2方向下流側に位置している。離間制御部材2440が第一位置からW51方向に移動すると、第一力付与面2440bと退避力受け部2433mが当接し、現像ユニット9が揺動軸Kを中心として、図192(b)中矢印V1方向に回転する。
図192(b)では、図192(a)から現像ユニット9がV1方向に回転した結果、ばね掛け部2433cが直線L80上に位置している。
さらに、離間制御部材2440がW51方向に移動し図192(c)に示す第二位置まで移動すると、現像ユニット9は図192(b)中矢印V1方向に回転し、ばね掛け部2433cが直線L80よりも矢印V1方向下流側に位置する。
ここで、図193(a)~(c)は、それぞれ図192(a)~(c)におけるフック形状部2410cとばね掛け部2433cとの係合状態を示している。そして、それぞれの係合状態において、付勢部材2410からばね掛け部2433cが受ける力の方向について、図193(a)~(c)を用いて説明する。
まず、図193(a)について説明する。図193(a)および図192(a)は現像ユニット9が現像位置であり、ばね掛け部2433cは直線L80よりも矢印V2方向下流側に位置している。
上述したように付勢部材2410の一端側のコイル数巻分は付勢部材着座部2481bと付勢部材外径支持部2481cにより支持されることにより、付勢部材着座部2481bの略法線方向に略直線的に支持されている。
これに対して、付勢部材2410のフック形状部2410cは直線L80よりも矢印V2方向下流側に位置するばね掛け部2433cと係合している。そのため、付勢部材2410は付勢部材支持部2481とばね掛け部2433cとの間で直線L80に対して傾いた状態で配置される。
尚、フック形状部2410cは円柱形状であるばね掛け部2433cと係合している。フック形状部2410cの内径はばね掛け部2433cの円柱形状部外径よりも大きいので、フック形状部2410cはばね掛け部2433cに対して回動可能である。
ここで、現像ユニット9の揺動軸Kとばね掛け部2433c円柱形状の中心を結ぶ線L81と、ばね掛け部2433c円柱部の交点を位置P24bとする。次に、図192(a)に示す現像ユニット9が現像位置にある場合のフック形状部2410cとばね掛け部2433cとの位置P24aは、位置P24bよりも矢印V1方向下流側に位置している。
付勢部材2410は、付勢部材支持部2481とばね掛け部2433cとの間で圧縮された状態で設置される圧縮コイルばねである。ばね掛け部2433cは、位置P24aにおいて、その円柱部が、フック形状部2410cのうちのコイル側(一端側)の部分と接触する。その結果として、ばね掛け部2433cの円柱部で受ける力はばね掛け部2433c円柱部の中心方向に向かう。つまり、ばね掛け部2433cは付勢部材2410から図192(a)および図193(a)中矢印F85方向の力を受ける。
図192(a)および図193(a)中矢印F85方向は、直線L80に対して、図192(a)中矢印V2方向に傾いている。これにより、付勢部材2410から矢印F85方向の力を受けた現像ユニット9はV2(退避位置から現像位置に向かう)方向に回動するモーメントが付勢される。つまり、図192(a)に示すように、現像ユニット9が現像位置に位置するとき、付勢部材2410は現像ユニット9が現像位置に移動可能な当接保持位置(第2位置)にある。
[離間動作]
[離間動作]
続いて、図192(a)に示す状態から図192(b)に示す状態を経由して図192(c)の状態に移動する過程について説明する。図192(b)、図192(c)は離間制御部材2440が第一位置から第二位置への移動し現像ユニット9が現像位置(当接位置)から退避位置(離間位置)に移動する途中の状態である。
離間制御部材2440は図192(a)に示す第一位置から、図192(a)中矢印W51方向に移動すると、第一力付与面2440bと退避力受け部2433mが当接し、現像ユニット9が揺動軸Kを中心として、図192(b)中矢印V1方向に回転する。(図192(b)に示す状態)
図192(b)では、図192(a)から現像ユニット9がV1方向に回転した結果、ばね掛け部2433cが直線L80上に位置している。ばね掛け部2433cの移動に伴いフック形状部2410cは図193(a)に示す状態からばね掛け部2433cに対し回動し、図193(b)中の位置P24bにおいて、ばね掛け部2433cと接触する。この状態において、付勢部材2410は直線L80と略平行に付勢部材支持部2481とばね掛け部2433cとの間で圧縮された状態で配置される。
図192(b)では、図192(a)から現像ユニット9がV1方向に回転した結果、ばね掛け部2433cが直線L80上に位置している。ばね掛け部2433cの移動に伴いフック形状部2410cは図193(a)に示す状態からばね掛け部2433cに対し回動し、図193(b)中の位置P24bにおいて、ばね掛け部2433cと接触する。この状態において、付勢部材2410は直線L80と略平行に付勢部材支持部2481とばね掛け部2433cとの間で圧縮された状態で配置される。
ばね掛け部2433cは位置P24bにおいて、付勢部材2410から直線L80と略同方向である図192(b)および図193(b)中矢印F86方向の力を受ける。すなわち、矢印F86方向の力は現像ユニット9の揺動軸K中心に向いており、現像ユニット9を回動させるモーメントは発生しにくい。
次に、図192(b)から図192(c)に移動に伴い、ばね掛け部2433cは直線L80よりも矢印V1方向下流側に移動する。上述したように、フック形状部2410cの内径はばね掛け部2433cの円柱形状部外径よりも大きいので、フック形状部2410cはばね掛け部2433cに対して回動可能である。そのため、ばね掛け部2433cの移動に伴い、フック形状部2410cは図193(b)に示す状態からばね掛け部2433cに対し回動し、図193(c)中の位置P24cにおいて、ばね掛け部2433cと接触する。
この状態において、ばね掛け部2433cは位置P24cにおいて、ばね掛け部2433c円柱部の中心方向に向かう図193(c)中矢印F87方向の力を受ける。
図193(c)中矢印F87方向で示すように、直線L80に対して、図192(b)中矢印V1の下流側方向に傾いた状態であって、付勢部材支持部2481とばね掛け部2433cとの間で圧縮された状態で配置される。これにより、付勢部材2410から矢印F87方向の力を受けた現像ユニット9はV1(現像位置から退避位置に向かう方向)方向に回動するモーメントが付勢される。
このように、現像ユニット9の回動に伴いよりばね掛け部2433cが移動することによって、付勢部材2410がばね掛け部2433cに作用する力の方向を切り替える。これにより、付勢部材2410によるばね掛け部2433cへの付勢方向は、現像ユニット9が当接保持位置から離間保持位置に移動する方向と一致するので、安定して付勢部材2410を当接保持位置(第2位置)から離間保持位置(第1位置)へ移動させることができる。現像ユニット9は現像枠体がドラムユニット8のドラム枠体に設けられた不図示の回転止め部(退避時位置決め部)に接触するまで回動し、回転止め部に接触した状態で位置決めされ退避位置(離間位置)に維持される。この時、現像ユニット9はドラムユニット8によって安定的に退避位置(離間位置)で保持された状態であると言える。
図192(d)に、現像ユニット9が退避位置で離間制御部材2440がホーム位置の状態を示す。実施例9と同様に、離間制御部材2440がホーム位置に位置する場合においても、現像ユニット9は退避位置に維持されており、離間制御部材2440は力受け部2433eおよび退避力受け部2433mとに接触しない状態を維持することが可能である。このため、退避位置に位置する現像ユニット9は離間制御部材2440に負荷をかけない。(図192(d)に示す状態)。
[当接動作]
[当接動作]
次に、図194を用いて、現像ユニット9が退避位置から現像位置に移動する動作について説明する。図194(a)に、現像ユニット9が退避位置で離間制御部材2440がホーム位置に位置する状態を示す。図194(b)に、離間制御部材2440がホーム位置から図194(b)中W52方向の第一位置に移動し現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図194(c)に、現像ユニット9が現像位置で離間制御部材2440が第一位置に位置する状態を示す。
離間制御部材2440がホーム位置から、図194(a)中矢印W52方向に移動すると、離間制御部材2440の第二力付与面2440cと現像カバー部材2433の力受け部2433eが当接し、現像ユニット9は図194(b)中V2方向に回動する。現像ユニット9が図194(b)中V2方向に回動するに伴い、ばね掛け部2433cは図193(c)の状態から図193(b)の状態を経由し、図193(a)の状態に到達する。図193(a)の状態において、付勢部材2410は現像ユニット9に対してV2方向に回動するモーメントを付勢する当接保持位置(第2位置)である。
付勢部材2410が当接保持位置まで移動すると、現像ユニット9は図194(b)中V2方向に回転し、現像ローラ6と感光ドラム4が当接する現像位置まで移動する(図194(c)の状態)。第一位置に移動した離間制御部材2440は現像位置に移動した現像ユニット9の力受け部2433eと離れるので、離間制御部材2440は現像ユニット9から負荷を受けなくなる。この時、現像ユニット9はドラムユニット8によって安定的に現像位置(当接位置)で保持された状態であると言える。
上述したように付勢部材2410の作用方向は図194(a)中矢印F85方向からに図194(c)中矢印F87方向に切り替わり、付勢部材2410により現像ユニット9を回動させるモーメントの方向は、図194(c)中矢印V1方向からに図194(b)中矢印V2方向に切り替わる。つまり、付勢部材2410の現像ユニット9への付勢方向が、離間制御部材2440の移動による現像ユニット9の回転方向と一致するので、安定して付勢部材2410を離間保持位置(第1位置)から当接保持位置(第2位置)へ移動させることができる。
また、本実施例では、付勢部材2410を圧縮コイルばねで構成したが、それに限られるものではない。つまりは、付勢部材2410を引張りばねで構成してもよい。ただし、離間制御部材2440の移動方向と、付勢部材2410の現像ユニット9への付勢方向を一致させるためには、実施例13で示したような回転方向を切り替えるための移動部材950を追加で設ける必要がある。
[保持機構]
[保持機構]
上述した実施例においては、ドラムユニット8が現像ユニット9を退避位置と現像位置とでそれぞれ安定的に保持するための構成が、第1位置と第2位置をとることが可能な付勢部材2410を保持部であるとして説明した。しかしながら、本実施例の構成を次のように見ることも可能である。即ち、ドラムユニット8が現像ユニット9を退避位置と現像位置とでそれぞれ安定的に保持する保持機構として、少なくとも、付勢部材2410、付勢部材支持部2481、ばね掛け部2433cを挙げることも可能である。この場合、付勢部材2410が第1位置をとり現像ユニット9が退避位置にある時は保持機構が第1状態にあり、付勢部材2410が第2位置をとり現像ユニット9が現像位置にある時は保持機構が第2状態にあると言える。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、本実施例では、付勢部材2410によって現像ユニット9が付勢される方向が変化して離間制御部材2440によって付勢される方向と一致させることができるので、付勢部材2410の当接保持位置(第2位置)と離間保持位置(第1位置)間の移動を安定させることができる。つまり、現像ユニット9の姿勢の制御を安定させることができる。
本発明の実施例22に係るプロセスカートリッジ、画像形成装置の実施形態について、図195、図196を用いて説明する。
本実施例では、前述した実施例9と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例9と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
本実施例は、実施例9で説明した画像形成装置本体502が有する、プロセスカートリッジPを支持するトレイ110と保持部材2510が係合することで、現像ユニット9が退避位置を維持する構成である。以下、詳細を説明する。
図130、図134に示されたトレイ110のプロセスカートリッジを装着する装着部110aは、プロセスカートリッジPY、PM、PC、PKにそれぞれ対応して設けられた複数の仕切り110b(図195、図196の110bM、110bC)を備える。これらの仕切り110bにより、装着部110aには、4つのプロセスカートリッジPY、PM、PC、PKをそれぞれ収納するための4つのスペースが形成されている。
図195、図196は、実施例9の図130で示した画像形成装置本体502の内部で第二内側位置に位置する第二のプロセスカートリッジPMを駆動側から見た図である。
はじめに、図195を用いて、仕切り110bMと110bCの間に設置されたプロセスカートリッジPMの現像ユニット9が、現像位置から退避位置に移動する動作について説明する。
図195(a)に、現像ユニット9が現像位置で、離間制御部材540がホーム位置の状態を示す。図195(b)、図195(c)に、離間制御部材540がホーム位置から第二位置に移動し、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。図195(d)に、現像ユニット9が退避位置で、離間制御部材540がホーム位置の状態を示す。
本実施例の保持部材2510は実施例9と同様で図195(a)に示すように、被支持穴(第二当接部、当接部)2510aが、現像カバー部材2533が有する軸である支持部2533cに回転可能に支持され、引っ張りばね530(付勢手段)によって、図195(a)中矢印B1方向に付勢される。また、保持部材2510の第一被規制面2510hが、現像カバー部材2533の第一規制面2533hに当接することで、引っ張りばね530によって付勢される保持部材2510の回転が規制される。保持部材2510は、被支持穴2510aから感光ドラム4とは反対方向に突出した突出部(保持部)2501bを有し、この突出した形状の先端に仕切り当接部(係合部)2510sを有している。また、保持部材2510は、実施例9と同様に、図195(a)矢印Z2方向に突出した力受け部(第1の力受け部、当接力受け部)2510eを有している。
現像カバー部材2533は、実施例9と同様に現像ユニット9に固定されていて、図195(a)矢印Z2方向に突出した退避力受け部(第2の力受け部、離間力受け部)2533mを有している。
本実施例の離間制御部材540は、実施例9と同様に画像形成装置本体502が有する。図195(a)に示すように、図195(a)中矢印W51方向において、力受け部2510e、離間制御部材540、退避力受け部2533mの順に配置される。実施例9と同様に、離間制御部材540は第一位置と第二位置とを移動可能である。さらに、離間制御部材540は第一位置と第二位置の間で、力受け部2510eと退避力受け部2533mとに接触しないホーム位置に移動可能に構成されている。
[離間動作]
[離間動作]
離間制御部材540が図195(a)に示すホーム位置から第二位置に向かう方向(矢印W51方向)に移動すると、第一力付与面540bと現像カバー部材2533の退避力受け部2533mが当接し、第一力付与面540bが退避力受け部2533mを押圧する。図195(b)に示すように、退避力受け部2533mが押圧されると、現像ユニット9は揺動軸Kを中心に、現像位置から退避位置に向かう方向である図195(b)中矢印V1方向に回転する。このとき、現像カバー部材2533に支持される保持部材2510も揺動軸Kを中心に、図195(b)中矢印V1方向に回転移動し、保持部材2510の仕切り当接部2510sが仕切り110bMに当接する。そして、仕切り当接部2510sに仕切り110bMから図195(b)中矢印N8方向に反力を受ける。これにより、被支持穴(第二当接部)2510aと支持部2533cを中心に、保持部材2510は図195(b)中矢印B2方向に回転し、仕切り当接部2510sが回転移動する。よって、仕切り当接部2510sは、仕切り110bMの下端部110bMaよりも図195(b)中矢印Z2方向に移動する。
離間制御部材540が、図195(b)に示す状態から図195(b)中矢印W51方向に移動し、図195(c)に示す第二位置まで移動すると、仕切り当接部2510sは仕切り110bMよりも、図195(b)中矢印W51方向に移動する。仕切り当接部2510sが仕切り110bMから離れると、保持部材2510は引っ張りばね530によって、被支持穴(第二当接部)2510aと支持部2533cを中心に図195(c)中矢印B1方向に回転する。そして、保持部材2510の第二被規制面2510tが仕切り110bMの下端部110bMaに当接することで、保持部材2510の姿勢が規制される(図195(c)の状態)。この時の保持部材2510の位置は仕切り110bMと係合するために仕切り110bMを迂回した位置である。
図195(c)に示す状態から、離間制御部材540が図195(c)中矢印W52方向に移動し、第二位置からホーム位置に戻ると、現像ユニット9は、現像カップリング部材74が受ける駆動力によって図195(c)中矢印V2方向に回転する。そして、現像カバー部材2533に支持される保持部材2510も、図195(c)中矢印V2方向に回転移動し、仕切り当接部2510sは仕切り110bMの当接部110bMbに当接する。仕切り当接部2510sが仕切り110bMの当接部(被当接部、係合部)110bMbに当接すると、現像ユニット9の回転が止まる(図195(d)に示す状態)。この時、保持部材2510は、突出部(保持部)2501bの一端が仕切り110bMの当接部(被当接部、係合部)110bMbに仕切り当接部2510sが当接(係合)し、他端は被支持穴2510aが支持部2533cに当接した規制位置(離間保持位置、第1位置)にある。つまり、保持部材2510が仕切り110bMと係合している。このため、現像ユニット9は退避位置(離間位置)で維持(安定的に保持)される。
図195(d)に示すように、ホーム位置に位置する離間制御部材540は保持部材2510と現像カバー部材2533とから離れるため、現像ユニット9からの負荷を受けない。
以上のように、離間制御部材540がホーム位置から第二位置に移動し、再びホーム位置に戻る動作により、現像ユニット9を現像位置(当接位置)から退避位置(離間動作)に移動させることができる。
[当接動作]
[当接動作]
次に、図196を用いて、現像ユニット9が退避位置から現像位置に移動する動作について説明する。図196(a)に、現像ユニット9が退避位置で離間制御部材540がホーム位置に位置する状態を示す。図196(b)、図196(c)に、離間制御部材540がホーム位置からW52方向に移動し、現像ユニット9が退避位置から現像位置に移動する途中の状態を示す。図196(d)に、現像ユニット9が現像位置で、離間制御部材540がホーム位置に位置する状態を示す。
図196(b)に示すように、離間制御部材540が、ホーム位置から第一位置へ向かう(矢印W52方向)に移動すると、離間制御部材540の第二力付与面540cと保持部材2510の力受け部2510eが当接し、第二力付与面540cは力受け部2510eを押圧する。力受け部2510eが押圧された保持部材2510は、被支持穴(第二当接部)2510aと支持部2533cを中心に図196(b)中矢印B2方向に回転する。保持部材2510が回転すると、仕切り当接部2510sは図196(b)中矢印B2方向に回転移動するため、仕切り当接部2510sは仕切り110bMの下端部110bMaよりも図196(b)中矢印Z2方向に移動し、当接部(被当接部、係合部)110bMbと仕切り当接部2510sが離れて、保持部材2510と仕切り110bMとの係合が解除される。この時の保持部材2510の位置は、仕切り110bMとの係合を解除するために仕切り110bMを迂回した位置であり、現像ユニット9が現像位置(当接位置)へ移動することを許容する位置でもある。
仕切り当接部2510sが仕切り110bMから離れると、仕切り当接部2510sが仕切り110bMの当接部110bMbに当接することで退避位置に維持されていた現像ユニット9は、現像カップリング部材74が受ける駆動力や現像ユニット付勢ばね134(図131等参照)の付勢力によって矢印V2方向に回転し、現像位置(当接位置)に移動する(図196(c)の状態)。
図196(c)に示す離間制御部材540が第一位置から、ホーム位置方向の図196(c)中矢印W51方向に移動すると、保持部材2510は引っ張りばね530によって、図196(c)中矢印B1方向に回転する。そして、保持部材2510の第一被規制面2510hが現像カバー部材2533の第一規制面2533hに当接することで、保持部材2510の姿勢が規制される。(図196(d)の状態)
図196(d)に示すように、ホーム位置に位置する離間制御部材540は保持部材2510と現像カバー部材2533とから離れるため、現像ユニット9からの負荷を受けない。
以上のように、離間制御部材540がホーム位置から第一位置に移動し、再びホーム位置に戻る動作により、現像ユニット9は退避位置から現像位置へと移動させることができる。
このように、保持部材2510は現像ユニット9(もしくは現像枠体)から現像ローラの回転軸線M2と交差する方向(本実施例では直交する方向)に突出した部分(突出部2501b)を有する。更にこの突出した部分に係合部2510sを有している。このため、係合部2510sをトレイ110と係合させて、現像ユニット9を所定の位置(本実施例では退避位置(離間位置))に保持することができる。
なお、保持部材2510が現像ユニット9(もしくは現像枠体)から突出する方向は、現像ローラの回転軸線M2と交差する方向(本実施例では直交する方向)に限られない。
また、本実施例では、保持部材2510がトレイ110の仕切り110bに係合する構成を示したが、これに限られるものではない。即ち、保持部材2510がトレイ110の他の部分や、画像形成装置本体502の他の部分に係合して、現像ユニット9を所定の位置に保持する構成でもよい。また、本実施例では、保持部材2510をトレイ110等に係合させた時の現像ユニット9の位置は退避位置(離間位置)としたが、現像位置(当接位置)で現像ユニット9を保持するように構成しても良い。この場合は、現像ユニット付勢ばね134に代えて、実施例20で説明したような引張ばね(離間方向付勢部材)22541等によって、現像ユニット9が現像位置から退避位置へ向かう方向へ付勢された構成とすれば良い。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
本発明の実施例23に係るプロセスカートリッジ、画像形成装置の実施形態について、図197~200を用いて説明する。本実施例では、前述した実施例22と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例22と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
本実施例は、実施例22で説明した画像形成装置本体502が有し、プロセスカートリッジPを支持するトレイ110の一部と、現像ユニット2690の一部である保持部材2633bの斜面2633b2が当接することで、現像ユニット2609が退避位置を維持する構成である。以下、詳細を説明する。
図197に示すように、トレイ110のプロセスカートリッジを装着する装着部110aは、プロセスカートリッジPY、PM、PC、PKにそれぞれ対応して設けられた複数の仕切り110b(110bM、110bC等)を備える。これらの仕切り110bにより、装着部110aには、4つのプロセスカートリッジPY、PM、PC、PKをそれぞれ収納するための4つのスペースが形成されている。
図197~図200は、実施例9の図130で示した画像形成装置本体502の内部で第二内側位置に位置する第二のプロセスカートリッジPMを駆動側から見た図である。説明のため図197~図200は、離間制御部材26540及び仕切り110bが見えるように、トレイ110を部分的に切断した図としている。図201~図203は各実施形態における保持部材部分の部分拡大図であり、(a)は退避位置の状態、(b)は現像位置の状態を表している。
[現像位置への移動]
[現像位置への移動]
はじめに、図197~図198を用いて、仕切り110bMと110bCの間に設置されたプロセスカートリッジPMの現像ユニット2609が、退避位置から現像位置に移動する動作について説明する。図197(a)に、現像ユニット2609が退避位置で、離間制御部材26540がホーム位置の状態を示す。図197(b)、図198(a)に、離間制御部材26540がホーム位置から第一位置に移動し、現像ユニット2609が退避位置から現像位置に移動する途中の状態を示す。
図198(b)に、現像ユニット2609が現像位置で離間制御部材26540がホーム位置の状態を示す。
本実施例の離間制御部材26540は、実施例9と同様に画像形成装置本体502が有する。図197(a)に示すように、矢印W51方向において、力受け部2633e、離間制御部材26540、退避力受け部2633aの順に配置される。実施例9と同様に、離間制御部材26540は第一位置と第二位置とを移動可能である。さらに、離間制御部材26540は第一位置と第二位置の間で、力受け部2633eと退避力受け部2633aとに接触しないホーム位置にも移動可能に構成されている。
現像枠体の一部である現像カバー部材2633には、力受け部2633e、退避力受け部2633aが設けられている。また、現像カバー部材2633には保持部材2633bが一体的に配設されている。保持部材2633bは、力を受けると撓む弾性部2633f、曲面2633b1、及び斜面2633b2を備える。尚、本実施例では樹脂成型にて設けられたモールド板ばねによって弾性を得ている。しかし、他の形態として、図202で示すように、保持部材2633sが金属ばね2633s1を有していたり、図203で示すように保持部材2633t自体が金属板ばねであっても良い。
[当接動作]
[当接動作]
離間制御部材26540が図197(a)に示すホーム位置から、第一位置に向かう方向である矢印W52方向に移動すると、第一力付与面26540cと現像カバー部材2633に配設された力受け部(第1の力受け部、当接力受け部)2633eが当接し、第一力付与面26540cが力受け部2633eを押圧する。図197(b)に示すように、力受け部2633eが第一力付与面26540cが力受け部2633eに押圧されると、現像ユニット2609は揺動軸Kを中心に、退避位置(離間位置)から現像位置へ向かう方向(図90(b)中矢印V2方向)に回転する。
このとき、現像カバー部材2633に配設された保持部材2633bも揺動軸Kを中心に、矢印V2方向に回転移動し、保持部材2633bの斜面2633b2が仕切り110bCに当接しつつ斜面による分力によって押され、弾性部2633fが撓む(弾性変形する)。
そして、図198(a)及び図201(b)で示すように仕切り110bCの面110bC2と曲面2633b1とが接触し、仕切り110bCと現像ユニット2609の現像枠体との隙間に保持部材2633bが位置する状態となる。この状態が、現像ユニット2609が現像位置(当接位置)にある状態であり、画像形成装置本体からの現像ローラの駆動トルクや現像ユニット付勢ばね(図130等参照)による付勢によって、現像ユニット2609は現像位置に維持される。
尚、曲面2633b1は撓んだ時に円弧中心を揺動軸Kと同一中心となる円弧形状(図201(b)参照)としており、現像ユニット2609が現像位置にあるときに反力F26’が、現像ユニット2609をV1方向又はV2方向へ回転させるモーメントとして働かない。
そして、図198(b)に示すように、ホーム位置に位置する離間制御部材26540は力受部2633eから離れるため、現像ユニット9からの負荷を受けない。
以上のように、離間制御部材26540がホーム位置から第一位置に移動し、再びホーム位置に戻る動作により、現像ユニット9を退避位置(離間位置)から現像位置(当接位置)に移動させることができる。
[離間動作]
[離間動作]
次に、図199~図200を用いて、仕切り110bMと仕切り110bCの間に設置されたプロセスカートリッジPMの現像ユニット2609が、現像位置(当接位置)から退避位置(離間位置)に移動する離間動作について説明する。図199(a)に、現像ユニット2609が現像位置で離間制御部材26540がホーム位置の状態を示す。図199(b)、図200(a)に、離間制御部材26540がホーム位置から第二位置に移動し、現像ユニット9が現像位置から退避位置に移動する途中の状態を示す。図200(b)に、現像ユニット9が退避位置で離間制御部材26540がホーム位置の状態を示す。
離間制御部材26540が図199(a)に示すホーム位置から、第2位置に向かう方向である矢印W51方向に移動すると、第一力付与面26540bが現像カバー部材2633に配設された力受け部(第2の力受け部、離間力受け部)2633aが当接し、押圧する。
図199(b)に示すように、退避力受け部2633aが第一力付与面26540bに押圧されると、現像ユニット2609は揺動軸Kを中心に、現像位置から退避位置へ向かう方向(矢印V1方向)に回転する。更に回転が進むと、弾性部2633fの弾性変形が復元していくと共に、仕切り110bCの角部110bC1と保持部材2633との接触点は曲面2633b1上から斜面2633b2へと移動する。そして、斜面2633b2に仕切り110bCの角部から反力F26を受ける。(図201(a)参照)この斜面2633b2によって現像ユニット2609を矢印V1方向に回転させるモーメントが生じ、V2方向のモーメント(現像ユニット2609の重力や、装置本体から受ける駆動トルクなど)と釣り合い、退避位置(離間位置)を維持(保持)する。つまり、本実施例においては、保持部材(保持部)2633bの斜面2633b2が仕切り110bCの角部(被係合部)と係合する係合部である。
そして、図200(b)に示すように、ホーム位置に位置する離間制御部材26540は退避力受部2633aから離れるため、現像ユニット9からの負荷を受けない。
以上のように、離間制御部材540がホーム位置から第二位置に移動し、再びホーム位置に戻る動作により、現像ユニット2609を当接位置(当接位置)から退避位置(離間位置)に移動し、退避位置を維持させることができる。
なお、本実施例は、現像ユニット2609が現像位置にある時、曲面2633b1と仕切り110bCとが接触する構成であったが、これらは離間していても良い。また、保持部材2510が現像ユニット9(もしくは現像枠体)から突出する突出部である。そしてその突出方向は、現像ローラの回転軸線M2と交差する方向(本実施例では直交する方向)であり、現像ユニット2609からドラムユニット2608(又は感光ドラム)の反対側に向かう方向であった。しかし、保持部材2510が現像ユニット9(又は現像枠体)から突出する方向は、以下で説明する別形態に示すように、これに限られない。
また、本実施例は、現像ユニット2609の保持部材2633bをトレイ110の仕切り110bCに接触させて現像ユニット2609を所定の位置(退避位置)で保持する構成だったが、この限りではない。つまり、保持部材2633bをトレイ110の仕切り110bC以外の部分や、トレイ110以外の画像形成装置本体502の部分に接触させて、現像ユニット2609を所定の位置(退避位置)で保持する構成でも良い。
また、本実施例では、力受け部(当接力受け部)2633eと退避力受け部(離間力受け部)2633aを現像ユニット2609の現像枠体を構成する現像カバー部材2633に設けたが、これに限られない。
即ち、現像ユニットに実施例1~8等で示したような、カートリッジ押圧ユニット191等によって押圧されて、待機位置から稼働位置へZA方向に移動する移動部材(152R、152L等)を設ける。更に、移動部材が稼働位置にある時に離間制御部材(196)から力を受けることが可能な位置に力受け部(当接力受け部)2633eと退避力受け部(離間力受け部)2633aを設ける。具体的な例としては、退避力受け部(離間力受け部)2633aは第一力受け部152Rkの位置、力受け部(当接力受け部)2633eは第二力受け部152Rnを設けた位置の位置に設ける。
そして、力受け部(当接力受け部)2633eでW42方向の力を受けた際は、現像ユニットが離間位置から当接位置に向かう方向に移動し、退避力受け部(離間力受け部)2633aでW41方向の力を受けた際は、現像ユニットが当接位置から離間位置に向かう方向に移動するように移動部材から現像枠体へ力が伝達されるような構成とする。
このような構成にすれば、現像ユニットが離間位置から当接位置に向かう方向に移動することで上述した当接動作を行い、現像ユニットが当接位置から離間位置に向かう方向に移動することで上述した離間動作を行わせることができる。
<実施例23の別形態>
<実施例23の別形態>
実施例23の別形態について説明する。本別形態においては、図204で示すように、保持部材2633’bを少なくとも現像ローラの回転軸線M2の方向に突出するように設けた。保持部材2633’bはトレイ110の側面部110bCS及び横平面部110bC3に当接することで、現像ユニット2609を退避位置(離間位置)に維持(保持)する。
ドラム枠体の一部である駆動側カートリッジカバー部材520’には穴(開口、切り欠き部)520’Hが設けられている。現像枠体の一部である現像カバー部材2633’と一体的に設けられた保持部材2633’bはこの穴520’Hを貫通することで、横平面部110bC3と接触する。
現像ユニット2609の各位置に保持部材2633’と、側面部110bCS、横平面部110bC3との関係は、上述した実施例26の保持部材2633と、仕切り110bC、角部110bC1、又は面110bC2との関係と同様である。
図205は説明の便宜上、駆動側カートリッジカバー部材520’を不図示にした状態での保持部材2633’の動きを説明するための図である。
図205(a)は、現像ユニット2609が退避位置(離間位置)にある状態を示した図である。このとき保持部材2633’bは斜面2633‘b2と横平面部110bC3が接触しているので、現像ユニット2609は退避位置で維持(保持)される。
図205(b)は現像ユニット2609が現像位置(当接位置)にある状態を示した図である。このとき保持部材2633’bは平面2633‘b1の少なくとも一部が横平面部110bC3よりも下側に潜り込んだ状態(図205(c)参照)となり、現像ユニット2609は現像位置(当接位置)で維持(保持)される。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
本実施例では、前述した実施例1と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例1と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
図206は、カートリッジトレイ1771の斜視図である。図207は、プロセスカートリッジ1700Cおよびカートリッジトレイ1771の断面図であり、離間当接機構に関する動作を説明する図である。(a)は離間状態を示しており、(b)は当接状態を示している。
まずは、カートリッジトレイ1771について説明する。図206に示すように、カートリッジトレイ1771の長手方向端部には、長手方向内側に伸びる被当接部1771b(M,C,K(Yは不図指))が設けられている。なお、YMCKすべて同様な構成となるため、今後接尾字のYMCKは省略して記載する。被当接部1771には、矢印X1方向(カートリッジトレイ1771の押し込み方向)に向く被当接面1771cが設けられている。さらに被当接面1771cとは上方(Z1方向)側で隣り合う第二規制面1771dが設けられる。
次にプロセスカートリッジ1700Cの構成について図207を用いて説明する。ドラム枠体の一部である駆動側カートリッジカバー部材1716Cには、プロセスカートリッジ100の被当接面116cに相当する部分が無く、代わりにカートリッジトレイ1771の被当接部1771bが入ることを可能とする空間部1716Ceが設けられている。この点以外では、プロセスカートリッジ1700Cの構成はプロセスカートリッジ100と同様である。特に、プロセスカートリッジ1700Cは移動部材1752R、スペーサ(規制部材、保持部材)1751Rを有している点はプロセスカートリッジ100と同様である。
次にプロセスカートリッジ1700Cがカートリッジトレイ1771に装着されたときの配置について説明する。実施例1の駆動側カートリッジカバー部材116の被当接面116cに相当する部分がカートリッジトレイ1771の被当接面1771cが担っている点が主に実施例1と本実施例の違いである。このため、図207(a)に示す現像ユニット1709の離間状態において、スペーサ1751Rの当接部1751Rcは被当接面1771cと当接する。また、図207(b)に示す現像ユニット1709の当接状態において、スペーサ1751Rの当接部1751Rcは被当接面1771cと離れ、被規制面(被規制部)1751Rkが第二規制面1771dと接触する。
以上のような構成を適用すれば、被当接面をカートリッジトレイ1771に配置することも可能である。離間当接機構の動作の説明は実施例1と同様であるため省略する。
また、本実施例では当接離間機構を駆動側にのみ配置する構成だが、非駆動側のみに配置してもよいし、駆動側と非駆動側の両方に配置してもよい。発明を適用する構成に合わせて適宜選択可能である。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
本発明の実施例25について、図208~図211を用いて説明する。本実施例では、前述した実施例14と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例14と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
図208はプロセスカートリッジPとスペーサ1110が係合する前の状態を表した図である。図209はプロセスカートリッジPとスペーサ1110が係合した状態を表した図である。図210はプロセスカートリッジPとスペーサ1110の係合する様子を順に表した部分拡大図である。
本実施例ではプロセスカートリッジPが単体の状態(画像形成装置502に装着されていない自然状態)、及びトレイ110が降下する前の状態において、スペーサ1110の退避力受け部(第2の力受け部、離間力受け部)1110mと力受け部(第1の力受け部、当接力受け部)1110eの間に空間がない場合の例を示す。
図208に示すように、退避力受け部1110mと力受け部1110eの間には、弾性部材1110SG1(図210参照)と弾性部材1110SG2が、スペーサ1110と一体的に取り付けられている。弾性部材1110SG1、1110SG2は、発泡ウレタンなどのクッション材を用いているが、低硬度のゴム部材や、シリコーン部材などの弾性部材を用いても良い。また、弾性部材1110SG1、1110SG2の退避力受け部1110m、力受け部1110eへの取り付けは、両面テープや接着剤などを用いればよい。
図208(a)、図210(a)に示すように、弾性部材1110SG1、1110SG2の間にはスリット部110SLが設けられており、プロセスカートリッジ単体状態においては弾性部材1110SG1と弾性部材1110SG2同志が隙間なく密着した状態となっている。尚、弾性部材が2つの例を示しているが、1つの弾性部材にスリット部を設けた構成でも良い。
図210(b)に示すように、プロセスカートリッジが本体内で降下すると第1力付与面540b第2力付与面540c及びスリット部1110SLに入り込み、最終的に図209、図210(c)に示す状態となる。この状態では、退避力受け部1110mと力受け部1110eは、力付与部540b、540cとの間にある弾性部材1110SG1又は1110SG2を介して離間制御部材540から離間力及び当接力を受けることが出来る。
図211は現像ユニット9が現像位置(当接位置)と退避位置(離間位置)との間を移動する動作を示した図である。図211(a)は、現像ユニット9が現像位置にあり、離間制御部材540がホーム位置にある状態を示す。現像ユニット9を退避位置へ移動する場合、離間制御部材540がW51方向に移動することで、図211(b)に示す状態を経て図211(c)に示す状態となる。そこから離間制御部材540がW52方向へ移動してホーム位置に戻ると、図211(d)に示した現像ユニット9が退避位置にある状態となる。現像ユニット9を現像位置へ移動する場合、図211(d)に示す状態から離間制御部材540がW52方向へ移動して、現像ユニット9を現像位置まで移動させ、その後、離間制御部材540がW51方向に移動してホーム位置に戻ると図211(a)に示す状態となる。
このような、現像ユニット9の現像位置(当接位置)と退避位置(離間位置)との間を移動は既に説明した実施例11と同じ動作であるため、詳細については割愛する。なお、本実施例においては、離間制御部材540がホーム位置ある状態でも、離間制御部材540と弾性部材1110SG1、1110SG2とが当接している。このため、離間制御部材540に高い負荷がかからないよう、弾性部材1110SG1、1110SG2の弾性力は比較的小さなものしている。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、本実施例によれば、退避力受け部(第2の力受け部、離間力受け部)1110mと力受け部(第1の力受け部、当接力受け部)1110eの間の空間に弾性部材1110SG1、1110SG2を設ける構成とした。このように弾性部材1110SG1、1110SG2を設けることで、これら2つの力受け部の間の空間に異物が入って、離間制御部材540からの力を受けられなくことなどを抑制することができる。
<施例25の別形態>
<施例25の別形態>
実施例25の別形態について、図212、図213を用いて説明する。なお、本別形態では実施例25と異なる点のみ説明する。本別形態では、スペーサ2810の退避力受け部(第2の力受け部、離間力受け部)2810mと力受け部(第1の力受け部、当接力受け部)2810eの間の空間を閉じることが可能な構成を示す。
図212、図213は退避力受け部2810mと力受け部2810eが離間制御部材と係合する様子を表した部分拡大図である。図213(a)は現像ユニット9が現像位置にある状態を示し、図213(b)は現像ユニット9が退避位置にある状態を示した部分拡大図である。
退避力受け部2810mと力受け部2810eはスペーサ2810に回動(移動)可能に支持され、両者は、ばね部材2810SPによって互いに引き合う構成となっている。また、スペーサ2810には回転止部2810STP1、及び、2810STP2が配設されており、それぞれ力受け部2810e、退避力受け部2810mの回転を規制可能である。退避力受け部2810mと力受け部2810eの下端には斜面2810m1、2810e1が設けられている。
プロセスカートリッジPが単体の状態(画像形成装置502に装着されていない自然状態)、及びトレイ110が降下する前の状態において、退避力受け部2810mと力受け部2810eは図212に示すように互いに密着し、間に空間が形成されていない。
次に図213(a)で示すように、画像形成装置502内でトレイ110に支持されたプロセスカートリッジPが下降し始めると、第1力付与面540b及び第2力付与面540cが斜面2810m1、2810e1と接触し、ばね部材2810SPの付勢力に抗して、退避力受け部2810mと力受け部2810eとの間を開いていく。更に、プロセスカートリッジPが下降していくと、退避力受け部2810mと力受け部2810eとの間に第1力付与面540b第2力付与面540cが進入し、退避力受け部2810mと力受け部2810eの間は更に開いていていく。最終的に図213(b)で示した状態となり、退避力受け部2810mと力受け部2810eの間に形成された空間に、離間制御部材540の第1力付与面540b及び第2力付与面540cが進入した状態となる。
図214(a)は、現像ユニット9が現像位置にある状態における離間制御部材540とスペーサ2810の関係を説明するための部分拡大図であり、図214(b)は、現像ユニット9が退避位置にある状態における離間制御部材540とスペーサ2810を説明するための部分拡大図である。図214(a)、図214(b)のいずれも離間制御部材540がホーム位置にある状態を示している。現像ユニット9を現像位置から退避位置へ移動させる際は、図214(a)にある状態から離間制御部材540がW51方向へ移動して、退避力受け部2810mを押圧して反時計方向へ回転させ、回転止部2810STP2に当接させる。更に離間制御部材540がW51方向へ移動することで、回転止部2810STP2に当接した退避力受け部2810mを更に押圧し、回転止部2810STP2を介してスペーサ2810自体を押圧して反時計回りに回転させる。これによって、スペーサ2810は規制位置(第1位置)へ移動して現像ユニット9は退避位置へ移動する。更に離間制御部材540は、W52方向へ移動することで、現像ユニット9を退避位置に維持したままホーム位置へ戻り、図214(b)に示した状態となる。
現像ユニット9を退避位置から現像位置へ移動させる際は、図214(b)にある状態から離間制御部材540がW52方向へ移動して、力受け部2810eを押圧して時計方向へ回転させ、回転止部2810STP2に当接させる。更に離間制御部材540がW52方向へ移動することで、回転止部2810STP1に当接した力受け部2810eを更に押圧し、回転止部2810STP1を介してスペーサ2810自体を押圧して時計回りに回転させる。これによって、スペーサ2810は許容位置(第2位置)へ移動して現像ユニット9は現像位置へ移動する。更に離間制御部材540は、W51方向へ移動することで、現像ユニット9を現像位置に維持したままホーム位置へ戻り、図214(a)に示した状態となる。
また、退避力受け部2810mと力受け部2810のいずれか一方のみがスペーサ2810に対して回動(移動)可能な構成であってもよい。
なお、本別形態では、図214(a)、図214(b)に示す状態においては、退避力受け部2810mと回転止部2810STP2との間、及び、力受け部2810eと回転止部2810STP1との間には僅かに隙間がある。この隙間を設けることで、ホーム位置にある離間制御部材540と、現像位置及び退避位置にある現像ユニット9の回転止部2810STP2と回転止部2810STP1との間の位置誤差を許容し、離間制御部材540に高い負荷が掛かることを避けることができる。
以上説明した本別形態の構成によれば、実施例1、9と同様の効果を得ることができる。
本別形態によれば、退避力受け部(第2の力受け部、離間力受け部)2810mと力受け部(第1の力受け部、当接力受け部)2810eの間の空間を閉じることが可能となる。このように空間を閉じることで、これら2つの力受け部の間の空間に異物が入って、離間制御部材540からの力を受けられなくことなどを抑制することができる。
次に、図215~図224を用いて、実施例26について説明する。本実施例では、前述した実施例1と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例1と対応する構成については同じ符号もしくは前半部の数字を変更し後半部の数字及び英字が同じとなるように符号を付す。
実施例1~25のプロセスカートリッジ100は、ドラムユニット108と現像ユニット109を有していたが、本実施例のカートリッジ(現像カートリッジ2311)は、ドラムユニット108を有していない。本実施例では、トレイ2371が感光ドラム2304や帯電ローラ2305を有し、これらを回転可能に支持している。現像ユニット2309は、トレイ2371に対して着脱可能な現像カートリッジ2311として構成されている。トレイ2371の構成やトレイ2371に対する現像カートリッジ2311の装着については後述する。実施例1と同様に、現像カートリッジ2311においても、現像ローラ2306の回転軸線M2の軸線方向(図217のY1、Y2方向と平行)に関して、現像駆動入力ギア2332の現像カップリング部2332aが配置された側を駆動側とし、反対側を非駆動側とする。
本実施例は実施例1と同様に、現像カートリッジ2311の駆動側に離間当接機構2350R(図217参照)、非駆動側に離間当接機構2350L(図218参照)を有する。また、離間当接機構については駆動側、非駆動側でほぼ同一機能を有しているため、駆動側については各部材の符号にRを付し、非駆動側については各部材の符号を駆動側と同一にしてLを付する。
[画像形成装置のトレイ構成]
[画像形成装置のトレイ構成]
現像カートリッジ2311を支持するトレイ2371について、図215から図216を用いて詳細に説明する。図215、図216は不図示の画像形成装置におけるトレイ2371の斜視図である。トレイ2371は、矢印Y2方向端部に配置された駆動側側板2371a、矢印Y1方向端部に配置された非駆動側側板2371b、これらの間に配置されたドラム保持部材2371cを有し、これらが一体的に構成されている。
駆動側側板2371aは、直線部2371Rv1、2371Rv2からなる位置決め部2371Rvを有し、後述する現像カートリッジ2311の駆動側支持部材2316の円弧部2316e(図217参照)を支持し位置決めする位置決め機能を有する。また、直線部2371Rv1と直線部2371Rv2は略V字形状を形成し、これらの成す角θRは、0°よりも大きく180°よりも小さくなるように構成されている。
非駆動側側板2371bは、直線部2371Lv1、2371Lv2からなる位置決め部2371Lvを有し、後述する現像カートリッジ2311の非駆動側支持部材2317の円弧部2317e(図218参照)を支持し位置決めする位置決め機能を有する。また、直線部2371Lv1と直線部2371Lv2は略V字形状を形成し、これらの成す角θLは、0°よりも大きく180°よりも小さくなるように構成されている。
ドラム保持部材2371cは、感光ドラム2304を回転可能に支持している。感光ドラム2304は矢印Y2方向端部にドラムカップリング部材2343を有し、不図示の本体側ドラム駆動カップリングと係合することで駆動力を受け回転するよう構成されている。またドラム保持部材2371cは、不図示の支持部材を介して帯電ローラ2305を感光ドラム2304に回転可能に支持し、帯電ローラ2305の周面を感光ドラム2304に接触させ、感光ドラム2304の回転に伴い帯電ローラ2305が従動回転するよう構成されている。
さらにドラム保持部材2371cは、実施例1と同様にスペーサ2351Rの離間保持面(当接部)2351Rc(図226参照)と対向し、現像ユニット2309を離間した状態に維持する被当接面(当接部)2371Rdを有する。非駆動側も同様にドラム保持部材2371cは、スペーサ2351Lの離間保持面(当接部)2351Lcと対向する被当接面(当接部)2371Ldを有する。またドラム保持部材2371cは現像カートリッジ2311の矢印Y1、Y2方向の位置を決める長手位置決め凹部2371eを有する。
加えてドラム保持部材2371cは、後述する現像カートリッジ2311を回転止めして位置決めする回転止め凸部2371Rk、2371Lkを有する。ただし本実施例では、イエロー(Y)トナーを収容する現像ユニットが挿入される位置(以降この各色現像ユニットの挿入位置をステーションと称する)のみ、ドラム保持部材2371cではなく側板連結部材2371wにイエロー現像ユニット用の回転止め凸部2371Rk、2371Lkを有する。また本実施例では回転止め凸部2371Rk、2371Lkは同一のステーションの現像カートリッジではなく、矢印X1方向に一つ隣のステーションの現像カートリッジの回転を止めるよう構成されている。なお同一ステーションの現像ユニットの回転を規制するよう、前述の同一ステーションの感光ドラム2304を保持するドラム保持部材2371cに回転止め凸部2371Rk、2371Lkを配置してもよい。ただし一つの現像ユニットに対して、位置決め部2371Rv、2371Lvと回転止め凸部2371Rk,2371Lkは、駆動側と非駆動側それぞれにおいて同一XZ断面内(矢印X方向、Z方向から成る断面)かつなるべく離れた位置に配置することが望ましい。
[現像カートリッジ構成]
[現像カートリッジ構成]
次に、トレイ2371へ装着する現像カートリッジ2311について、図217と図218を用いて詳細に説明する。図217は、離間当接機構2350Rを含む現像カートリッジ2311の駆動側の組立斜視図である。本実施例では、現像ユニット2309に配置される現像ローラ2306を、トレイ2371が支持する感光ドラム2304(図215、図216参照)に対して移動させて現像位置と退避位置をとるために現像ユニット2309を回動可能に支持する駆動側支持部材2316を有する。現像カートリッジ2311をトレイ2371に装着した時、駆動側支持部材2316はトレイ2371に固定される。
駆動側支持部材2316は、現像カバー部材2328の円筒部2328bの外径部と嵌合し、回転可能に支持する円筒支持部2316aを有する。ここで現像カバー部材2328の円筒支持部2316aの中心軸は、実施例1に記載の揺動軸Kと同一であり、現像ユニット2309及び現像駆動入力ギア2332の回動中心である。以降この中心軸を揺動軸Kと称する。現像カバー部材2328は、円筒部2328bの径方向外側に、矢印Y2方向へ延びる支持部材係止部2328m、2328nを有する。
なお支持部材係止部2328m、2328nは、矢印Y2方向端部に現像カバー部材2328の円筒部2328bへ向けて延び、駆動側支持部材2316の被係止面2316hと係合して駆動側支持部材2316の矢印Y2方向への移動を規制する支持部材係止面2328m1、2328n1を有する。なお被係止面2316hと支持部材係止面2328m1、2328n1の間には不図示の空隙が設けられており、現像カバー部材2328と一体化された現像ユニット2309が回動する際の妨げとならないよう配置されている。さらに駆動側支持部材2316は、トレイ2371の位置決め部2371Rvの直線部2371Rv1、2371Rv2と接触する揺動軸Kを中心とした円弧部2316eを有する。また円弧部2316eの矢印Z1方向略直上には、後述する支持部材押圧部2391bによって押圧される被押圧部2316gを有する。ただし円弧部2316eは、現像ユニットの回動中心を中心とする円弧でなくてもよく、配置や形状はこれに限らない。加えて駆動側支持部材2316は、トレイ2371の回転止め凸部2371Rkと矢印X1、X2方向に係合する回転止め凹部2316fを有する。なお、トレイ2371に対する駆動側支持部材2316の位置決めについては後述する。
離間当接機構2350Rは、規制部材(離間保持部材)であるスペーサ2351R、押圧部材である移動部材2352R、引っ張りばね2353を有する。実施例1と同様に、現像カバー部材2328は第一支持部2328cと第二支持部2328kを有する。第一支持部2328cは、スペーサ2351Rの支持受け部2351Raと嵌合し回転可能に支持される。また第二支持部2328kは、移動部材2352Rの長丸支持受け部2352Raと嵌合し回転可能に支持される。また、引張りばね2353によって移動部材2352Rとスペーサ2351Rは互いに引き合うよう付勢される。
以上が駆動側の現像ユニット2309の構成であり、組立後の駆動側の現像カートリッジ2311を図219に示す。
図218は、離間当接機構2350Lを含む現像カートリッジ2311の非駆動側の組立斜視図である。現像カートリッジ2311は駆動側支持部材2316と同様の機能を有する部材として非駆動側支持部材2317を有する。
非駆動側支持部材2317は、非駆動側軸受2327の円筒部2327aの外径部と嵌合し、回転可能に支持する不図示の円筒支持部を有する。非駆動側軸受2327は、矢印Y1方向へ延びる支持部材係止部2327m、2327nを有する。なお支持部材係止部2327m、2327nは、矢印Y1方向端部に、非駆動側支持部材2317の被係止面2317h、2317kと係合して非駆動側支持部材2317の矢印Y1方向への移動を規制する支持部材係止面2327m1、2327n1を有する。なお被係止面2317h、2317kと支持部材係止面2317m1、2317n1の間には不図示の空隙が設けられており、非駆動側軸受2327と一体化された現像ユニット2309が回動する際の妨げとならないよう配置されている。ここで非駆動側軸受2327の円筒部2327aの中心軸は、前述の揺動軸Kと同一であり、現像ユニット2309の回動中心である。さらに非駆動側支持部材2317は、トレイ2371の位置決め部2371Lvの直線部2371Lv1、2371Lv2と接触する揺動軸Kを中心とした円弧部2317eを有する。また円弧部2317eの矢印Z1方向略直上には、後述する支持部材押圧部2390bによって押圧される被押圧部2317gを有する。ただし円弧部2317eは、現像ユニットの回動中心を中心とする円弧でなくてもよく、配置や形状はこれに限らない。加えて非駆動側支持部材2317は、トレイ2371の回転止め凸部2371Lkと矢印X1、X2方向に係合する回転止め凹部2317fを有する。なお、トレイ2371に対する非駆動側支持部材2317の位置決めについては後述する。
非駆動側には実施例1と同様に、感光ドラム2304に対して現像ローラ2306を当接させるための付勢力を発生させる付勢部材として現像加圧ばね2334を有する。現像加圧ばね2334は非駆動側軸受2327のばね掛け部2327kと、非駆動側支持部材2327のばね掛け部2317mとの間に組付けられる。なお本実施例では、非駆動側支持部材2327のばね掛け部2317mを、非駆動側軸受2327のばね掛け部2327kに対して矢印BB方向(実施例1に記載のBB方向と同一)の下流側に配置し、現像加圧ばね2334を引っ張りばねとしたが、矢印BB方向の上流側に配置し、現像加圧ばね2334を圧縮ばねとしても良い。またトレイ2371に、現像ローラ2306を感光ドラム2304に対して当接させる現像加圧ばね2334と同様の機能を有する付勢部材等を配置しても良く、付勢力を与える構成はこれに限るものではない。離間当接機構2350Lは、規制部材であるスペーサ2351L、押圧部材である移動部材2352L、引っ張りばね2353を有する。実施例1と同様に、非駆動側軸受2327は第一支持部2327bと第二支持部2327eを有する。第一支持部2327bは、スペーサ2351Lの支持受け部2351Laと嵌合し回転可能に支持される。また第二支持部2327eは、移動部材2352Lの長丸支持受け部2352Laと嵌合し回転可能に支持される。また、引張りばね2353によって移動部材2352Lとスペーサ2351Lは互いに引き合うよう付勢される。
さらに現像枠体2325の非駆動側端部には現像枠体2325と一体的に形成され、矢印X2方向へ突出する長手位置決め凸部2325aを有する(図219、73参照)。
以上が非駆動側の現像ユニット2309の構成であり、組立後の非駆動側現像カートリッジ2311を図220に示す。
以上の構成により、現像ユニット2309をトレイ2371に装着した際に、は駆動側支持部材2316と非駆動側支持部材2317がトレイ2371に固定されることで、現像ユニット2309は揺動軸Kを中心に回転可能に支持される。
[現像カートリッジの位置決め]
[現像カートリッジの位置決め]
次に現像カートリッジ2311をトレイ2371へ装着し、現像カートリッジ2311の位置を決める構成について詳細に説明する。
図221、図222はトレイ2371に対して現像カートリッジ2311を4色分(2311Y、2311M、2311C、2311K)装着する過程を示した駆動側斜視図と非駆動側斜視図である。まず駆動側については、前述のトレイ2371の位置決め部2371Rvの直線部2371Rv1、2371Rv2に対して、駆動側支持部材2316の円弧部2316eが接触することで矢印Z方向の位置が決められる(図215、図217参照)。また2371の回転止め凸部2371Rkが駆動側支持部材2316の回転止め凹部2316fと係合することで、矢印X及び矢印Zから成るXZ断面内での回転が規制される(図215、図217参照)。非駆動側についても同様に、前述のトレイ2371の位置決め部2371Lvの直線部2371Lv1、2371Lv2に対して、非駆動側支持部材2317の円弧部2317eが接触することで矢印Z方向の位置が決められる(図215、図218参照)。また、トレイ2371の回転止め凸部2371Lkが非駆動側支持部材2317の回転止め凹部2317fと係合することで、矢印X及び矢印Zから成るXZ断面内での回転が規制される(図215、図218参照)。さらに、現像枠体2325の非駆動側に配置される長手位置決め凸部2325aが、トレイ2371の長手位置決め凹部2371eと係合し、矢印Y方向の移動が規制される(図215、72、73参照)。以上の位置決め構成により、現像ユニット2309はトレイ2371に対して、図223(駆動側斜視図)、図224(非駆動側斜視図)に示す現像ユニット装着完了姿勢に位置決めすることができる。
さらに図225を用いて、不図示の画像形成装置本体にトレイ2371を装着し、現像ユニット2309の姿勢を安定的に維持する構成について説明する。ここでは説明の簡略化のため、4色のステーションのうちYステーションを例にして説明する。なお他ステーションについても以降の構成は同様である。図225は、トレイ2371を画像形成装置本体内に装着し、不図示の前ドア(実施例1に記載の前ドア11と同義)を閉状態に移行させた際の、駆動側(図225(a))と非駆動側(図225(b))をそれぞれの方向から見た図である。なお図225(a)と図225(b)では、支持部材押圧部2391b、2390bの一部を部分断面線CSにて部分的に削除して示し、詳細は後述する。
カートリッジ押圧ユニット2390、2391は、実施例1と同様に現像ユニット2309の移動部材2352R、2352Lを押し下げる役割を担う第一力付与部2391a、2390aを有する。また、不図示の付勢部材によって駆動側支持部材2316と非駆動側支持部材2317を、トレイ2371の位置決め部2371Rv、2371Lvの直線部(2371Rv1および2371Rv2、2371Lv1および2371Lv2)へ押し付ける支持部材押圧部2391b、2390bを有する。支持部材押圧部2391b、2390bは、それぞれ被押圧部2316g、2317gに接触し所定の付勢力によって、駆動側支持部材2316と非駆動側支持部材2317を矢印ZA方向へ押圧する。これによって駆動側支持部材2316と非駆動側支持部材2317のXZ断面内における位置及び姿勢を、画像形成装置本体内において安定的に維持することができる。なお矢印Y方向についても、不図示の長手位置規制部によって画像形成装置本体内で現像カートリッジ2311の位置が決まるよう構成されている。
ここで本実施例の構成では、トレイ2371の位置決め部2371Rv及び回転止め凸部2371Rkと、駆動側支持部材2316の円筒支持部2316aと、カートリッジ押圧ユニット2391の支持部材押圧部2391bは、略矢印Y方向において同一位置に配置されることが望ましい。非駆動側も同様に、トレイ2371の位置決め部2371Lv及び回転止め凸部2371Lkと、非駆動側支持部材2317の円筒支持部2317aと、カートリッジ押圧ユニット2390の支持部材押圧部2390bは、略矢印Y方向において同一位置に配置されることが望ましい。このように配置することで、画像形成装置本体内で駆動側支持部材2316及び非駆動側支持部材2317の倒れを抑制し、現像ユニット2309を回動させる際に生じる不要な摺動抵抗の増加を抑制することができる。
[現像ユニットの当接離間動作]
[現像ユニットの当接離間動作]
本実施例における当接離間動作は、後述するように実施例1と同様であるため、駆動側の離間当接機構2350Rを簡潔に説明し、非駆動側は駆動側と同様のため説明を省略する。図226から図229を用いて説明する。なおトレイ2371及び支持部材押圧部2391bは省略して示す。
図226は現像ユニット2309が離間位置(退避位置)に位置した状態を示す。この状態から離間制御部材2396RがW42方向に移動すると、離間制御部材2396Rの第二力付与面2396Raと移動部材2352Rの第二力受け面2352Rpが当接し、移動部材2352Rが現像カバー部材2328の第二支持部2328k(図217参照)を回転中心としてBB方向へ揺動する。さらに移動部材2352Rの回転に伴って、移動部材2352Rの第二押圧面2352Rrがスペーサ2351Rの第二被押圧面2351Reと当接しながら、スペーサ2351RをB2方向へ回転させる。そしてスペーサ2351Rは、離間保持面(当接部)2351Rcとトレイ2371の被当接面(被当接部)2371dとが離れる離間解除位置(許容位置、第2位置)まで移動部材2352Rによって回転させられる。これによって現像ユニット2309が離間位置から現像ローラ2306と感光ドラム2304が当接する当接位置(現像位置)まで移動することが可能となる(図227の状態)。
その後、離間制御部材2396RがW41方向へ移動しホーム位置へ戻る(図228の状態)。
画像形成動作が終了し離間制御部材2396RがW41方向へ移動すると、第一力付与面2396Rbと第一力受け面2352Rmが当接し、移動部材2352Rの第一押圧面2352Rqが駆動側軸受2326の第一被押圧面2326c(図217参照)と当接することで、現像ユニット2309は当接位置から揺動軸Kを中心に矢印V1方向へ回転する(図229の状態)。
その後、離間制御部材2396RがW42方向へ移動しホーム位置へ戻ることで、スペーサ2351Rは、再度トレイ2371の被当接面2371dと接触し規制位置(離間保持位置、第1位置)に移行する。これによって、移動部材2352Rに対して離間制御部材2396Rが作用しない位置に位置する(図226の状態)。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、本実施例に基づけば、実施例1~25で説明したような現像ユニットを現像位置と退避位置との間で移動させる構成を、感光ドラム等を有していない現像カートリッジにおいても適用することができる。
<実施例26の別形態1>
<実施例26の別形態1>
実施例26では、トレイ2371にスペーサ2351Rの離間保持面(当接部)2351Rcと当接する被当接面(被当接部)2371dを設けた。本別形態では現像ユニット2309の駆動側支持部材2316に被当接面(被当接部)2316cを設けた構成について説明する。本別形態では、前述した実施例26と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例26と対応する構成については同じ符号を付与している。
[現像カートリッジの構成]
[現像カートリッジの構成]
実施例26と同様に、現像カートリッジ2311をトレイ2371に装着すると、駆動側支持部材2316はトレイ2371に固定され、駆動側支持部材2316に対して現像ユニット2309が揺動軸Kを中心にV1方向、V2方向に回転する。
図242に示すように、駆動側支持部材2316は、スペーサ2351Rの離間保持面(当接部)2351Rcと当接する被当接面(被当接部)2316cを有する。また、現像カートリッジ2311には、一端部が駆動側支持部材2316に接続され他端部が駆動側軸受2326に接続された現像加圧ばね(付勢部材)2334が設けられている。現像加圧ばね2334は、現像ユニット2309が駆動側支持部材2316に対してV2方向に回転するよう駆動側軸受2326を付勢する。V2方向は、現像カートリッジ2311がトレイ2371に装着された状態において、現像ユニット2309を退避位置(離間位置)から現像位置(当接位置)へ向かって移動させる方向である。
現像カートリッジ2311の非駆動側についても駆動側と同様の構成となっている。
[現像ユニットの当接離間動作]
[現像ユニットの当接離間動作]
本実施例における当接離間動作は、後述するように実施例1、26と同様であるため、駆動側の離間当接機構2350Rを簡潔に説明し、非駆動側は駆動側と同様のため説明を省略する。図242から図245を用いて説明する。なおトレイ2371及び支持部材押圧部2391bは省略して示す。
図242は現像ユニット2309が離間位置(退避位置)に位置した状態を示す。この状態から離間制御部材2396RがW42方向に移動すると、離間制御部材2396Rの第二力付与面2396Raと移動部材2352Rの第二力受け面2352Rpが当接し、移動部材2352Rが現像カバー部材2328の第二支持部2328k(図217参照)を回転中心としてBB方向へ揺動する。さらに移動部材2352Rの回転に伴って、移動部材2352Rの第二押圧面2352Rrがスペーサ2351Rの第二被押圧面2351Reと当接しながら、スペーサ2351RをB2方向へ回転させる。そしてスペーサ2351Rは、離間保持面(当接部)2351Rcと駆動側支持部材2316の被当接面2316cとが離れる離間解除位置(許容位置、第2位置)まで移動部材2352Rによって回転させられる。これによって現像ユニット2309が離間位置から現像ローラ2306と感光ドラム2304が当接する当接位置(現像位置)まで移動することが可能となる(図243に示す状態)。
その後、離間制御部材2396RがW41方向へ移動しホーム位置へ戻る(図244に示す状態)。
画像形成動作が終了し離間制御部材2396RがW41方向へ移動すると、第一力付与面2396Rbと第一力受け面2352Rmが当接し、移動部材2352Rの第一押圧面2352Rqが駆動側軸受2326の第一被押圧面2326c(図217参照)と当接することで、現像ユニット2309は当接位置から揺動軸Kを中心に矢印V1方向へ回転する(図245に示す状態)。
その後、離間制御部材2396RがW42方向へ移動しホーム位置へ戻ることで、スペーサ2351Rは、再度駆動側支持部材2316の被当接面2316cと接触し規制位置(離間保持位置、第1位置)に移行する。これによって、移動部材2352Rに対して離間制御部材2396Rが作用しない位置に位置する(図242に示す状態)。
[トレイへの現像カートリッジの装着、取り外し]
[トレイへの現像カートリッジの装着、取り外し]
本別形態においては、図242に示したような現像ユニット2309が退避位置にある状態の現像カートリッジ2311をトレイ2371に装着する場合、現像ユニット2309は退避位置が維持される。これは、スペーサ2351Rが駆動側支持部材2316の被当接面2316cに当接することで規制位置(離間保持位置、第1位置)にある状態を維持するからである。同様の理由から、トレイ2371に装着された状態で図242に示したように現像ユニット2309が退避位置にある状態の現像カートリッジ2311をトレイ2371から取り外する場合も、現像ユニット2309は退避位置が維持される。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、本別形態に基づけば、実施例1~25で説明したような現像ユニットを現像位置と退避位置との間で移動させる構成を、感光ドラム等を有していない現像カートリッジにおいても適用することができる。
また本別形態によれば、現像ユニット2309の退避位置を現像カートリッジ2311内で決めることができるので、実施例26と比べて退避位置の位置精度を向上することが可能である。また、現像ユニット2309の退避位置を維持したまま現像カートリッジ2311をトレイ2371に対して装着又は取り外しが可能である。このため、現像カートリッジ2311をトレイ2371に対して装着又は取り外しの際に現像ローラ2306と感光ドラム2304とが接触することを避けることができる。
<実施例26の別形態2>
<実施例26の別形態2>
実施例26や実施例26の別形態1では、感光ドラム2304を支持するドラム保持部材2371cをトレイ2371に一体的に構成した。本別形態では、感光ドラムと帯電ローラを支持するドラム保持部材をトレイに対して着脱可能なドラムカートリッジとして構成した形態を説明する。この構成について図230~図234を用いて説明する。本別形態では、前述した実施例26と異なる構成、動作について主に説明し、同様の構成、動作については説明を省略する。また、前述した実施例26と対応する構成については同じ符号を付与している。
図230はトレイ2372に対して、現像カートリッジ2311とドラムカートリッジ2308を4色分装着する過程を示した駆動側斜視図である。トレイ2372は、矢印Y2方向端部に駆動側側板2372aと矢印Y1方向端部に非駆動側側板2372bを有し、側板連結部材2372w(Y、M、C、K)を介して一体的に構成されている。
駆動側側板2372aは、ドラムカートリッジ2308の位置及び姿勢を決めるドラムカートリッジ位置決め部2372Rxと、ドラムカートリッジ回転止め凸部2372Rmを有する。同様に現像カートリッジ2311の位置及び姿勢を決める現像カートリッジ位置決め部2372Rvと、現像カートリッジ回転止め凸部2372Rkを有する。
非駆動側側板2372bは、ドラムカートリッジ2308の位置及び姿勢を決めるドラムカートリッジ位置決め部2372Lxと、ドラムカートリッジ回転止め凸部2372Lmを有する。同様に現像カートリッジ2311の位置及び姿勢を決める現像カートリッジ位置決め部2372Lvと、現像カートリッジ回転止め凸部2372Lkを有する。
ドラムカートリッジ2308は、感光ドラム2304を回転可能に支持する駆動側ドラム支持部材2318及び非駆動側ドラム支持部材2319と、帯電ローラ2305を回転可能に支持するドラム枠体部2315を有し、一体的に構成されている。駆動側ドラム支持部材2318は、トレイ2372の位置決め部2372Rvの直線部2372Rv1、2372Rv2と接触する揺動軸Kを中心とした円弧部2318eを有する。また円弧部2318eの矢印Z1方向略直上には、画像形成装置本体170に設けられた不図示のドラムカートリッジ押圧部によって押圧される被押圧部2318gを有する。加えて駆動側ドラム支持部材2318は、トレイ2372の回転止め凸部2372Rkと矢印X1、X2方向に係合する回転止め凹部2317fを有する。また駆動側ドラム支持部材2318は、スペーサ2351Rの離間保持面(当接部)2351Rcが当接して現像ユニット2309を退避位置(離間位置)で保持するための被当接面(被当接部)2318cを有する。
なお、トレイ2372に対する駆動側ドラム支持部材2318の位置決めについては前述の構成(現像カートリッジ2311とトレイ2371の構成)と同一であるため説明は省略する。非駆動側ドラム支持部材2319も同様に、トレイ2372の位置決め部2372Lvの直線部2372Lv1、2372Lv2と接触する揺動軸Kを中心とした円弧部2319eを有する。また円弧部2319eの矢印Z1方向略直上には、不図示のドラムカートリッジ押圧部によって押圧される被押圧部2319gを有する。加えて非駆動側ドラム支持部材2319は、トレイ2372の回転止め凸部2372Lkと矢印X1、X2方向に係合する回転止め凹部2317fを有する。なお、トレイ2372に対する非駆動側ドラム支持部材2319の位置決めについては前述の構成と同一であるため説明は省略する。
次にドラムカートリッジ2308のトレイ2372への位置決めについて説明する。まず、図231、図232に示すように、ドラムカートリッジ2308は不図示の本体ドラムカートリッジ押圧部によってZ2方向にトレイ2372の位置決め部2372Rv、2372Lvに向かって押圧される。これにより、図233、図234に示すように、円弧部2318e、2319eが直線部2372Rv1、2372Rv2、2372Lv1、2372Lv2に対してZ2方向に押し付けられる。これにより、ドラムカートリッジ2308のZ2方向の位置が決められる。また、トレイ2372のドラムカートリッジ回転止め凸部2372Rm、2372Lmが駆動側ドラム支持部材2319と非駆動側ドラム支持部材2319のドラムカートリッジ回転止め凹部2318f、2319fと係合することで、XZ断面内での回転が規制される。さらに、非駆動側ドラム支持部材2319の不図示の長手突き当て部とトレイ2372の不図示の長手規制部が接触することで矢印Y方向の移動が規制される。以上の位置決め構成により、ドラムカートリッジ2308はトレイ2372に対して、図233、図234に示すドラムカートリッジ装着完了姿勢に位置決めすることができる。
現像カートリッジ2311のトレイ2372への装着は、前述の構成(現像カートリッジ2311とトレイ2371の構成)と同様のため説明を省略する。
なお本実施例における離間当接機構は、実施例2と同様に現像ユニット2309の駆動側もしくは非駆動側に一方側にのみ配置してもよい。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。
また、本別形態に基づけば、実施例1~25で説明したような現像ユニットを現像位置と退避位置との間で移動させる構成を、ドラムカートリッジと現像カートリッジをそれぞれ画像形成装置に着脱可能な構成においても適用することができる。
次に、図246~図254を用いて、実施例27について説明する。本実施例では、前述した実施例1と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。
実施例1では、プロセスカートリッジの非駆動側に現像加圧ばね134を設け、現像カップリング32の駆動トルク(駆動側)及び現像加圧ばね134による付勢力(非駆動側)によって現像ユニット109をドラムユニット108に向けて付勢していた。これに対し、実施例27では、実施例1の現像加圧ばね134を省き、プロセスカートリッジ2700の非駆動側に加圧ユニット2780を設けている。
[全体構成]
[全体構成]
まず、実施例27に係るカートリッジとしてのプロセスカートリッジ2700の全体構成を説明する。図246(a)は、駆動側から視たプロセスカートリッジ2700を示す斜視図であり、図246(b)は、非駆動側から視たプロセスカートリッジ2700を示す斜視図である。図247は、離間当接機構150Lを含む現像ユニット2709の非駆動側の分解斜視図である。
図246(a)乃至図247に示すように、プロセスカートリッジ2700は、感光ドラム104及び帯電ローラ105(図252参照)を含むドラムユニット108と、現像ローラ106(図3参照)を含む現像ユニット2709と、を有している。感光ドラム104、帯電ローラ105、現像ローラ106、ドラムユニット108及び現像ユニット2709は、それぞれ感光体、帯電部材、現像部材、第1ユニット及び第2ユニットを構成している。なお、ドラムユニット108と現像ユニット2709との組立構成並びに当接離間機構150(150L,150R)の構成は、実施例1と同様である。
すなわち、現像ユニット2709は、ドラムユニット108に対して、現像位置と離間位置との間で移動可能であり、プロセスカートリッジ2700は、現像位置において、現像ローラ106が感光ドラム104へトナーを付着させることが可能である。プロセスカートリッジ2700が離間位置に位置する状態において、現像ローラ106の少なくとも一部は、感光ドラム104から離れて配置される。また、保持部としてのスペーサ151L,151Rは、ドラムユニット108と現像ユニット2709の相対的な位置を規制し、現像ユニット2709を離間位置に保持するための第1位置としての離間保持位置と、現像ユニット2709を現像位置に保持するための第2位置としての離間解除位置と、に移動可能である。
また、現像ユニット2709の駆動側の構成は、実施例1と同様なため、以下では、主に現像ユニット2709の非駆動側の構成について説明する。現像ユニット2709の非駆動側には、現像容器125に対して固定ビス145及び図示しない接着剤によって固定される非駆動側軸受2727が設けられている。軸受部材としての非駆動側軸受2727は、現像ローラ106を回転可能に支持しており、実施例1で説明したように、非駆動側軸受2727には離間当接機構150Lが組付けられている。
プロセスカートリッジ2700は、駆動側カートリッジカバー部材116及び非駆動側カートリッジカバー部材2717によって長手方向(感光ドラム104の軸線方向)における両端部が支持されている。例えば、非駆動側カートリッジカバー部材2717の現像ユニット支持穴117aには、非駆動側軸受2727の円筒部127aの外径部が嵌合している。また、非駆動側カートリッジカバー部材2717のドラム支持穴117bには、感光ドラム104が嵌合する。これにより、現像ユニット2709は、ドラムユニット108に対して、現像ユニット支持穴117aの中心を通る揺動軸Kを中心に揺動可能に支持される。
図248(a)は、移動部材152Lが待機位置に位置する状態のプロセスカートリッジ2700の非駆動側を示す斜視図であり、図248(b)は、移動部材152Lが突出位置に位置する状態のプロセスカートリッジ2700の非駆動側を示す斜視図である。図249(a)は、移動部材152Lが待機位置に位置する状態のプロセスカートリッジ2700の非駆動側を示す正面図であり、図249(b)は、移動部材152Lが突出位置に位置する状態のプロセスカートリッジ2700の非駆動側を示す正面図である。図250は、移動部材152Lが突出位置に位置する状態のプロセスカートリッジ2700の非駆動側を示す断面図である。
図248(a)~図250に示すように、非駆動側軸受2727には、加圧ユニット2780が取り付けられている。加圧ユニット2780は、プロセスカートリッジ2700がトレイ171に装着(支持)されたときに、現像ユニット2709をドラムユニット108へ向けて付勢するためのユニットである。言い換えれば、加圧ユニット2780は、現像ユニット2709を離間位置から現像位置(当接位置)へ付勢して、感光ドラム104に対して現像ローラ106を当接可能である。なお、プロセスカートリッジ2700がトレイ171に装着されず、プロセスカートリッジ2700単体の状態では、加圧ユニット2780は、現像ユニット2709を離間位置から現像位置へ付勢しない。
すなわち、本実施例27では、プロセスカートリッジ2700には、実施例1の現像加圧ばね134が設けられていないが、加圧ユニット2780は、プロセスカートリッジがトレイ171に装着されたときに、現像加圧ばね134と同様の機能を発揮する。なお、実施例1では、図16及び図30(a)に示す現像加圧ばね134は、非駆動側カートリッジカバー部材117のばね掛け部117eと、非駆動側軸受127のばね掛け部127kと、の間に組付けられていた。しかしながら、本実施例27では、現像加圧ばね134が設けられていないため、図247~図249(b)に示すように、非駆動側カートリッジカバー部材2717及び非駆動側軸受2727に、ばね掛け部117e,127kが形成されていない。
[加圧ユニット]
[加圧ユニット]
次に、加圧ユニット2780及びその周辺構成について説明する。図251は、非駆動側軸受2727に組付けられた加圧ユニット2780を示す斜視図である。図250及び図251に示すように、付勢部としての加圧ユニット2780は、移動部材としての加圧部材2781と、弾性部材としての加圧ばね2782と、を有している。加圧部材2781は、第3位置としての待機位置(図252に示す位置)と、第4位置としての押し込み位置(図254に示す位置)と、に移動可能である。また、加圧部材2781は、軸線M27に沿って軸線方向M28に延びる軸部2781aと、軸部2781aの軸線方向M28における一端に設けられる当接面2781bと、軸部2781aの軸線方向M28における他端に設けられ、軸部2781aよりも径方向外側に延びるフランジ部2781cと、を有している。
力受け部としての当接面2781bは、プロセスカートリッジ2700がトレイ171に装着された状態で、トレイ171の付勢部用力付与部としての仕切り110bに当接するように構成されている。非駆動側軸受2727は、ばね座2727aと、軸線方向M28においてばね座2727aと間隔を開けて対向するように配置される係止部2727bと、を有している。係止部2727bには、加圧部材2781の軸部2781aを軸線方向M28に摺動可能に支持する軸支持部2727cと、フランジ部2781cが突き当たる突き当て面2727dと、が形成されている。
軸支持部2727cに支持された加圧部材2781のフランジ部2781cと、ばね座2727aと、の間には、圧縮ばねである加圧ばね2782が縮設されている。加圧部材2781は、この加圧ばね2782によって、軸線方向M28に平行な付勢方向M29に付勢されており、加圧部材2781のフランジ部2781cは、突き当て面2727dに突き当たっている。
図252は、非駆動側軸受2727及び加圧ユニット2780を示す断面図である。図252に示すように、フランジ部2781cが突き当て面2727dに突き当たっている状態では、加圧部材2781の当接面2781bは、非駆動側軸受2727の外側面2727eよりも付勢方向M29に突出している。すなわち、加圧部材2781に外力が作用していない状態では、待機位置に位置する加圧部材2781の当接面2781bは、非駆動側軸受2727の外側に位置している。
[プロセスカートリッジのトレイへの装着]
[プロセスカートリッジのトレイへの装着]
次に、プロセスカートリッジ2700をトレイ171に装着した状態について説明する。図253は、プロセスカートリッジ2700がトレイ171に装着された様子を示す断面図である。図254は、加圧ユニット2780を示す拡大断面図である。図253に示すように、トレイ171には、各色に対応するプロセスカートリッジ2700を装着可能な4つの装着部110aを有している。各装着部110aは、それぞれ仕切り110bによって仕切られている。仕切り110bは、加圧部材2781の軸線方向M28に対して傾斜するように設けられている。
プロセスカートリッジ2700がトレイ171の装着部110aに装着されると、図253及び図254に示すように、プロセスカートリッジ2700に設けられた加圧部材2781の当接面2781bが仕切り110bによって押圧される。仕切り110bは、加圧部材2781の軸線方向M28に対して傾斜する方向に延びているため、プロセスカートリッジ2700が装着部110aに装着される過程で、加圧部材2781は、加圧ばね2782の付勢力に抗して仕切り110bによって軸線方向M28に押圧される。言い換えれば、加圧部材2781の当接面2781bは、仕切り110bから外力としての押圧力F27を受ける。なお、仕切り110bから加圧部材2781の当接面2781bに作用する押圧力F27は、プロセスカートリッジ2700を装着部110aに装着するだけでも、プロセスカートリッジ2700の自重によって発生するが、カートリッジ押圧ユニット190によってプロセスカートリッジ2700が押圧されることで、より強い押圧力F27が発生する。
この押圧力F27により、加圧部材2781は、軸線方向M28に沿って、非駆動側軸受2727の内側へ向けて退避する。これにより、加圧部材2781は、待機位置から押し込み位置に移動する。この時、加圧部材2781のフランジ部2781cは、非駆動側軸受2727の突き当て面2727dから離間している。そして、加圧部材2781が仕切り110bによって押圧されて移動することで、加圧ばね2782は、軸線方向M28においてより圧縮される。
このため、加圧ばね2782から非駆動側軸受2727のばね座2727aに対して加圧力F28が作用する。この加圧力F28は、現像ユニット2709を、現像ユニット2709の揺動軸Kを中心に矢印V2方向に回転させるモーメント(付勢力)として作用する。すなわち、現像ユニット2709は、現像位置へ向けて付勢される。言い換えれば、加圧ユニット2780は、加圧部材2781の当接面2781bで押圧力F27を受けている間に、現像ユニット2709を現像位置へ向けて付勢させる付勢力を現像ユニット2709へ付与することが可能である。
[加圧ユニットの配置]
[加圧ユニットの配置]
ここで、加圧ユニット2780の配置について、図252を用いて詳細に説明する。図252は、現像ユニット2709が離間位置にある時に現像ローラ106の回転軸線M2の方向に沿ってプロセスカートリッジ2700を見た様子を示している。図252に示すように、現像ローラ106の回転中心としての回転軸線M2と、感光ドラム104の回転中心としての回転軸線M1と、を通る直線を、第1直線L31とする。
そして、第1直線L31に平行な方向を、矢印D31方向とする。更に、第1直線L31に対して、帯電ローラ105の回転中心としての回転軸線M5が配置されていない側の領域を、第1領域AD31とし、帯電ローラ105の回転軸線M5が配置されている側の領域を、第2領域AD32とする。
この時、加圧ユニット2780の加圧ばね2782は、矢印D31方向において、現像ローラ106よりも感光ドラム104から離れた位置に位置し、かつ第1領域AD31に配置されている。また、加圧ユニット2780の加圧部材2781は、矢印D31方向において、現像ローラ106よりも感光ドラム104から離れた位置に位置している。更に、加圧部材2781の全ては、第1領域AD31に配置されている。
このように、加圧ユニット2780は、プロセスカートリッジ2700の比較的下部に配置される。このため、プロセスカートリッジ2700をトレイ171の装着部110aに対して第一装着位置に装着する際に、プロセスカートリッジ2700が第一装着位置に到達する直前に、加圧部材2781が待機位置から押し込み位置に移動する。これにより、プロセスカートリッジ2700に発生する負荷を低減することができる。
また、加圧ユニット2780は、揺動軸Kから比較的離れた位置に位置するので、加圧力F28が比較的小さくても、現像ユニット2709を、揺動軸Kを中心に矢印V2方向に回転させるためのモーメントを十分に確保できる。よって、加圧ばね2782を小型化及びコストダウンできる。なお、図252に示すように、揺動軸Kからばね座2727aまでの距離DS1は、揺動軸Kから現像ローラ106の回転軸線M2までの距離DS2よりも長い。
以上のように、本実施例では、プロセスカートリッジ2700がトレイ171の装着部110aに装着されることで、現像ユニット2709が現像位置へ向けて付勢される。本実施例では、加圧ユニット2780は、プロセスカートリッジ2700の非駆動側のみに設けられているが、プロセスカートリッジ2700の駆動側は、実施例1で説明したように、現像カップリング32に画像形成装置本体170から入力される駆動トルクによって、現像位置へ向けて付勢される。このため、画像形成時には現像ユニット2709を現像位置に安定的に保持することができ、印字精度を向上することができる。
また、スペーサ151L,151Rが離間保持位置に位置し、現像ユニット2709が離間位置に位置する状態では、加圧ユニット2780の加圧力F28及び上記駆動トルクにより、スペーサ151L,151Rが駆動側カートリッジカバー部材116及び非駆動側カートリッジカバー部材2717に突き当てられる。これにより、駆動側カートリッジカバー部材116及び非駆動側カートリッジカバー部材2717が、スペーサ151L,151Rを介して(挟んで)、現像ユニット2709を位置決めし、現像ユニット2709を安定的に保持できる。
また、プロセスカートリッジ2700がトレイ171の装着部110aに装着されていない状態では、加圧ユニット2780の加圧力F28及び上記駆動トルクが発生しないため、現像ユニット2709は現像位置へ付勢されていない。これにより、プロセスカートリッジ2700を長寿命化することができる。また、現像ユニット2709を現像位置へ付勢する付勢力が発生しないことで、プロセスカートリッジ2700に発生する負荷が低減し、プロセスカートリッジ2700の変形を抑制することができる。
なお、プロセスカートリッジ2700がトレイ171の装着部110aに装着されていない状態(図252に示す状態)でも、加圧ばね2782によってわずかに非駆動側軸受2727のばね座2727aに対して付勢力が作用するが、この付勢力は上記加圧力F28よりもずっと小さいため、プロセスカートリッジ2700の長寿命化に影響はない。
次に、図255~図258を用いて、実施例28について説明する。本実施例では、前述した実施例27と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。
実施例27では、非駆動側軸受2727に加圧ユニット2780を設け、プロセスカートリッジ2700をトレイ171の装着部110aに装着することで、現像ユニット2709に加圧力F28を作用させていた。これに対し、実施例28では、移動部材152Lと軸受部材としての非駆動側軸受2827との間に加圧ばね2882を設けている。移動部材152L及び弾性部材としての加圧ばね2882は、付勢部2880を構成している。移動部材152Lは、実施例1と同様に、第3位置としての待機位置(図256に示す位置)と、第4位置としての突出位置(図258に示す位置)と、に移動可能である。以下、加圧ばね2882の構成及び作用について詳しく説明する。
図255は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれていない状態のプロセスカートリッジ2800を示す斜視図である。
図256は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれていない状態のプロセスカートリッジ2800を示す断面図である。図257は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれた状態のプロセスカートリッジ2800を示す斜視図である。図258は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれた状態のプロセスカートリッジ2800を示す断面図である。
図255及び図256に示すように、実施例28に係るカートリッジとしてのプロセスカートリッジ2800は、ドラムユニット108と、第2ユニットとしての現像ユニット2809と、を有している。現像ユニット2809は、揺動軸Kを中心に、現像ローラ106(図3参照)が感光ドラム104に対して当接する現像位置(当接位置)と、現像ローラ106が感光ドラム104に対して離間する離間位置と、の間で揺動可能である。
プロセスカートリッジ2800の非駆動側の上方には、実施例1で説明したように付勢部用力付与部としてのカートリッジ押圧ユニット190が配置されている。カートリッジ押圧ユニット190は、画像形成装置本体170の前ドア11(図2、図4参照)が開状態から閉状態に移行するのと連動して、矢印ZA方向に降下するように構成されている。
移動部材152L及び非駆動側軸受2827には、それぞればね座152Lj,2827jが形成されており、これらばね座152Lj,2827jの間には、圧縮ばねである加圧ばね2882が縮設されている。
図255及び図256は、プロセスカートリッジ2800がトレイ171(図253参照)の装着部110aに装着され、前ドア11が開状態となっている状態を示している。このため、カートリッジ押圧ユニット190は、まだ矢印ZA方向に降下しておらず、カートリッジ押圧ユニット190の第一力付与部190aと、移動部材152Lの力受け部としての被押込み面152Lfと、が離間している。
図257及び図258は、プロセスカートリッジ2800がトレイ171(図253参照)の装着部110aに装着され、前ドア11が閉状態となっている状態を示している。前ドア11が開状態から閉状態となり、カートリッジ押圧ユニット190が矢印ZA方向に降下すると、カートリッジ押圧ユニット190の第一力付与部190aが移動部材152Lの被押込み面152Lfを押し込む。言い換えれば、被押込み面152Lfは、第一力付与部190aから外力としての押圧力F29を受ける。これにより、移動部材152Lは、待機位置から、突出部152Lhがプロセスカートリッジ2800の矢印ZA方向へ突出する突出位置へ移動する。
なお、突出部152Lhは、実施例1と同様に、離間力受け部としての第一力受け部152Lkと、当接力受け部としての第二力受け部152Lnと、を有する(図29,35参照)。離間制御部材196L(図35,36参照)の当接力付与部としての第一力付与面196Laは、移動部材152Lの第二力受け部152Lnを押圧することで、現像ユニット2809を離間位置から現像位置へ移動させるための力をプロセスカートリッジ2800に付与する。離間制御部材196Lの離間力付与部としての第二力付与面196Lbは、移動部材152Lの第一力受け部152Lkを押圧することで、現像ユニット2809を現像位置から離間位置へ移動させるための力をプロセスカートリッジ2800に付与する。移動部材152Lが突出位置(図258に示す位置)にある時に、第二力受け部152Ln及び第一力受け部152Lkは、離間制御部材196Lの第一力付与面196La及び第二力付与面196Lbから、それぞれ力を受けることが可能である。
移動部材152Lが突出位置へ移動することにより、移動部材152Lのばね座152Ljは、非駆動側軸受2827のばね座2827jに近づき、加圧ばね2882がより圧縮される。このため、加圧ばね2882から非駆動側軸受2827のばね座2827jに対して加圧力F30が作用する。この加圧力F30は、現像ユニット2809を、現像ユニット2809の揺動軸Kを中心に矢印V2方向に回転させるモーメント(付勢力)として作用する。すなわち、現像ユニット2809は、現像位置へ向けて付勢される。言い換えれば、付勢部2880は、移動部材152Lの被押込み面152Lfで押圧力F29を受けている間に、現像ユニット2809を現像位置へ向けて付勢させる付勢力を現像ユニット2809へ付与することが可能である。
[付勢部の配置]
[付勢部の配置]
ここで、付勢部2880の配置について、図256を用いて詳細に説明する。図256は、現像ユニット2809が離間位置にある時に現像ローラ106の回転軸線M2の方向に沿ってプロセスカートリッジ2800を見た様子を示している。図256に示すように、現像ローラ106の回転中心としての回転軸線M2と、感光ドラム104の回転中心としての回転軸線M1と、を通る直線を、第1直線L31とする。
そして、第1直線L31に平行な方向を、矢印D31方向とする。更に、第1直線L31に対して、帯電ローラ105の回転中心としての回転軸線M5が配置されていない側の領域を、第1領域AD31とし、帯電ローラ105の回転軸線M5が配置されている側の領域を、第2領域AD32とする。
この時、付勢部2880の加圧ばね2882は、矢印D31方向において、現像ローラ106よりも感光ドラム104から離れた位置に位置し、かつ第2領域AD32に配置されている。また、加圧ばね2882の全ては、非駆動側軸受2827に重なるように配置されている。このため、プロセスカートリッジ2800を小型化することができる。
以上のように、本実施例では、プロセスカートリッジ2800がトレイ171の装着部110aに装着され、かつ前ドア11が開状態から閉状態となることで、現像ユニット2809が現像位置へ向けて付勢される。これにより、実施例27と同様の効果を奏することができる。
更に、プロセスカートリッジ2800がトレイ171の装着部110aに装着されても、前ドア11が閉状態となるまでは、現像ユニット2809に加圧力F30が発生しないため、現像ユニット2809は現像位置へ付勢されない。これにより、実施例27に比して、プロセスカートリッジ2800を更に長寿命化することができる。また、プロセスカートリッジ2800に発生する負荷が低減し、プロセスカートリッジ2800の変形を抑制することができる。
また、プロセスカートリッジ2800がトレイ171に装着されても、プロセスカートリッジ2800は、トレイ171の仕切り110bから上述した押圧力F27を受けない。このため、プロセスカートリッジ2800をトレイ171の装着部110aに装着する際の力が少なくて済み、操作性を向上することができる。
次に、図259~図262を用いて、実施例29について説明する。本実施例では、前述した実施例28と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。
実施例28では、移動部材152Lと非駆動側軸受2827との間に加圧ばね2882を設けていた。これに対し、実施例29では、加圧ばねの配置を変更して構成したものである。以下、加圧ばね2982の構成及び作用について詳しく説明する。
図259は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれていない状態のプロセスカートリッジ2900を示す斜視図である。図260は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれていない状態のプロセスカートリッジ2900を示す断面図である。図261は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれた状態のプロセスカートリッジ2900を示す斜視図である。図262は、カートリッジ押圧ユニット190によって移動部材152Lが押し込まれた状態のプロセスカートリッジ2900を示す断面図である。
図259及び図260に示すように、実施例29に係るカートリッジとしてのプロセスカートリッジ2900は、ドラムユニット108と、第2ユニットとしての現像ユニット2909と、を有している。現像ユニット2909は、揺動軸Kを中心に、現像ローラ106(図3参照)が感光ドラム104に対して当接する現像位置(当接位置)と、現像ローラ106が感光ドラム104に対して離間する離間位置と、の間で揺動可能である。
軸受部材としての非駆動側軸受2927には、ばね座2990が矢印ZA方向に移動可能に支持されており、かつ矢印ZA方向においてばね座2990に対向するようにばね座2927jが形成されている。これらばね座2990,2927jの間には、圧縮ばねである加圧ばね2982が縮設されている。ばね座2990及び弾性部材といての加圧ばね2982は、付勢部2980を構成している。ばね座2990は、第3位置としての待機位置(図259に示す位置)と、第4位置としての下降位置(図261に示す位置)と、に移動可能である。
図259及び図260は、プロセスカートリッジ2900がトレイ171(図253参照)の装着部110aに装着され、前ドア11が開状態となっている状態を示している。このため、カートリッジ押圧ユニット190は、まだ矢印ZA方向に降下しておらず、カートリッジ押圧ユニット190の第一力付与部190aと、移動部材152Lの被押込み面152Lfと、が離間している。カートリッジ押圧ユニット190には、矢印ZA方向においてばね座2990の力受け部としての被押込み面2990aに対向し、ばね座2990を押込み可能な押込み部190hが形成されている。
図261及び図262は、プロセスカートリッジ2900がトレイ171(図253参照)の装着部110aに装着され、前ドア11が閉状態となっている状態を示している。前ドア11が開状態から閉状態となり、カートリッジ押圧ユニット190が矢印ZA方向に降下すると、カートリッジ押圧ユニット190の第一力付与部190aが移動部材152Lの被押込み面152Lfを押し込む。これにより、移動部材152Lは、突出部152Lhがプロセスカートリッジ2900の矢印ZA方向(下方)へ突出する突出位置へ移動する。
これと同時に、カートリッジ押圧ユニット190の押込み部190hは、ばね座2990の被押込み面2990aを矢印ZA方向に押し込む。言い換えれば、ばね座2990の被押込み面2990aは、押込み部190hから外力としての押圧力F31を受ける。これにより、ばね座2990は、待機位置から下降位置に下降して非駆動側軸受2927のばね座2927jに近づき、加圧ばね2982がより圧縮される。このため、加圧ばね2982から非駆動側軸受2927のばね座2927jに対して加圧力F32が作用する。この加圧力F32は、現像ユニット2909を、現像ユニット2909の揺動軸Kを中心に矢印V2方向に回転させるモーメント(付勢力)として作用する。すなわち、現像ユニット2909は、現像位置へ向けて付勢される。言い換えれば、付勢部2980は、ばね座2990の被押込み面2990aで押圧力F31を受けている間に、現像ユニット2909を現像位置へ向けて付勢させる付勢力を現像ユニット2909へ付与することが可能である。
[付勢部の配置]
[付勢部の配置]
ここで、付勢部2980の配置について、図260を用いて詳細に説明する。図260は、現像ユニット2909が離間位置にある時に現像ローラ106の回転軸線M2の方向に沿ってプロセスカートリッジ2900を見た様子を示している。図260に示すように、現像ローラ106の回転中心としての回転軸線M2と、感光ドラム104の回転中心としての回転軸線M1と、を通る直線を、第1直線L31とする。また、帯電ローラ105の回転中心としての回転軸線M5と、感光ドラム104の回転軸線M1と、を通る直線を第3直線L33とし、第3直線L33と感光ドラム104の外周面の交点のうち、帯電ローラ105の回転軸線M5から近い方の交点における感光ドラム104の表面への接線を第2直線L32とする。
そして、第1直線L31に平行な方向を、矢印D31方向とする。更に、第1直線L31に対して、帯電ローラ105の回転軸線M5が配置されていない側の領域を、第1領域AD31とし、帯電ローラ105の回転軸線M5が配置されている側の領域を、第2領域AD32とする。第2直線L32に対して、帯電ローラ105の回転軸線M5が配置されている側の領域を、第3領域AD33とする。
この時、付勢部2980の加圧ばね2982は、矢印D31方向において、現像ローラ106よりも感光ドラム104から離れた位置に位置し、かつ第3領域AD33に配置されている。
以上のように、本実施例では、プロセスカートリッジ2900がトレイ171の装着部110aに装着され、かつ前ドア11が開状態から閉状態となることで、現像ユニット2909が現像位置へ向けて付勢される。これにより、実施例28と同様の効果を奏することができる。
<実施例27~29のその他の変形例>
<実施例27~29のその他の変形例>
なお、実施例27~29において、スペーサ151L,151Rは、現像ユニットに回転可能に支持されていたが、これに限定されない。例えば、スペーサ151L,151Rは、ドラムユニットに回転可能に支持されていてもよい。
また、実施例27において、加圧ユニット2780は、現像ユニット2709の非駆動側のみに設けられていたが、現像ユニット2709の駆動側にも設けてもよい。この場合、プロセスカートリッジ2700の駆動側に画像形成装置本体170から入力される駆動トルクを考慮して、駆動側に設ける加圧ユニットの付勢力を、非駆動側に設ける加圧ユニットの付勢力よりも弱く設定してもよい。また、加圧ユニット2780は、揺動軸Kの軸線方向において、現像ユニット2709の駆動側と非駆動側の間の位置に設けられてもよい。同様にして、実施例28,29の付勢部2880,2980は、現像ユニットの駆動側や、現像ユニットの駆動側と非駆動側の間の位置に設けられてもよい。
また、既述の各実施例は、適宜組み合わせてもよい。例えば、実施例9のプロセスカートリッジに、実施例27の加圧ユニット2780を適用してもよい。
また、実施例27の加圧ユニット2780、実施例28,29の付勢部2880,2980は、各実施例で説明した配置に限らず、適宜配置を変更してもよい。
また、加圧ばね2782,2882,2982は、圧縮ばねに限らず、現像ユニットを現像位置に付勢させる他の付勢手段を適用してもよい。例えば、皿ばね、板ばね等の他の種類のばねや、ゴムやスポンジ等の他の弾性部材を適用してもよい。
次に、図263~図280を用いて、実施例30について説明する。本実施例では、前述した実施例1と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。
実施例1では、スペーサ151Rは、矢印BB方向(図24,25参照)に回転する移動部材152Rに押圧されることで、引張りばね153の付勢力に抗して離間保持位置から離間解除位置に回転する。また、スペーサ151Rは、矢印BA方向(図2797参照)に回転する移動部材152Rが駆動側軸受125を押圧することで、引張りばね153の付勢力によって離間解除位置から離間保持位置に回転する。このように、現像ユニット109を当接位置又は離間位置に保持するスペーサ151Rは、移動部材152Rによる押圧力又は引張りばね153の付勢力を受けて回転していた。
これに対し、本実施例では、現像ユニット3009を現像位置又は離間位置に保持するカム3065を、現像ユニット3009の現像ローラ106を駆動するための駆動力を用いて回転させる。以下、本実施例の構成について詳しく説明する。
[全体構成]
[全体構成]
まず、実施例30に係るカートリッジとしてのプロセスカートリッジ3000の全体構成を説明する。図263(a)は、現像位置(当接位置)に位置する現像ユニット3009の駆動側を示す側面図である。図263(b)は、離間位置に位置する現像ユニット3009の駆動側を示す側面図である。
図263(a)乃至図265に示すように、本実施例に係るプロセスカートリッジ3000は、感光ドラム104及び帯電ローラ105(図269参照)を含むドラムユニット108と、現像ローラ106を含む現像ユニット3009と、移動部材152Rと、リンクユニット3040と、カムユニット3060と、を有している。感光ドラム104、帯電ローラ105、現像ローラ106、ドラムユニット108及び現像ユニット2709は、それぞれ感光体、帯電部材、現像部材、第1ユニット及び第2ユニットを構成している。
カムユニット3060は、回転可能なカム3065を有しており、カム3065は、現像ユニット3009の現像カバー部材3028に設けられた当接部3028dに当接可能なカム面3065aを有している。実施例1で説明したように、現像ユニット3009は、現像カップリング部132aの回転中心と同芯の揺動軸Kを中心に、ドラムユニット108に対して揺動可能に設けられている。そして、現像ユニット3009は、現像加圧ばね134(図34参照)の付勢力及び現像カップリング部132aが画像形成装置本体170から受ける駆動トルクによって、現像ローラ106が感光ドラム104に近づくように付勢されている。
現像ユニット3009は、ドラムユニット108に対して、現像位置と離間位置との間で移動可能であり、プロセスカートリッジ3000は、現像位置において、現像ローラ106が感光ドラム104へトナーを付着させることが可能である。プロセスカートリッジ3000が離間位置に位置する状態において、現像ローラ106の少なくとも一部は、感光ドラム104から離れて配置される。
図263(a)に示すように、カム3065のカム面3065aが現像カバー部材3028の当接部3028dに当接していない状態では、現像ローラ106が感光ドラム104に当接し、現像ユニット3009は現像位置に位置している。そして、図263(b)に示すように、カム3065が回転して現像カバー部材3028の当接部3028dがカム面3065aに押圧されることで、現像ユニット3009は離間位置に移動する。現像ユニット3009が離間位置に位置している状態では、現像ローラ106は、感光ドラム104に対して離間している。
図264は、駆動側カートリッジカバー部材3016、現像カバー部材3028、移動部材152R及びリンクユニット3040を示す斜視図である。図265は、現像カバー部材3028及び移動部材152Rを示す斜視図である。図266は、現像カバー部材3028を示す斜視図である。図267(a)(b)は、移動部材152Rを示す斜視図である。図268は、現像カバー部材3028を示す側面図である。
図264に示すように、プロセスカートリッジ3000は、駆動側カートリッジカバー部材3016及び非駆動側カートリッジカバー部材117(図13参照)によって挟まれるように支持されている。リンクユニット3040は、後述するように、駆動側カートリッジカバー部材3016と移動部材152Rとの間で支持されている。
図265~図268に示すように、現像カップリング部132a(図263参照)が設けられた現像駆動入力ギア132は、現像カバー部材3028の円筒部128bに回転可能に係合している。現像駆動入力ギア132は、現像ローラ106(図263参照)の駆動側の端部に固定された現像ローラギア131に噛合しており、現像ローラ106は、現像駆動入力ギア132が回転することで回転する。
移動部材152Rには、揺動軸Kの軸線方向に平行かつ現像ユニット3009の長手方向外側にそれぞれ突出するリンク係合部152Ri及びばね掛け部152Rjが設けられている。また、現像カバー部材3028にも、揺動軸Kの軸線方向に突出するばね掛け部3028gが設けられている。移動部材152Rのばね掛け部152Rjと現像カバー部材3028のばね掛け部3028gとの間には、引張りばね3053が張設されており、移動部材152Rは、引張りばね3053の付勢力により、矢印BA方向、並びに矢印Z1方向とは逆方向に付勢されている。
[リンクユニットの構成]
[リンクユニットの構成]
次に、リンクユニット3040の構成について主に説明する。図269は、駆動側カートリッジカバー部材3016、リンクユニット3040及びカムユニット3060を示す斜視図である。図270(a)(b)は、駆動側カートリッジカバー部材3016を示す斜視図である。図271(a)は、図270(b)の破線部分を示す拡大斜視図である。図271(b)は、ストッパ3044及びその周辺構成を示す拡大斜視図である。図272(a)は、リンクカム3042を示す正面図である。図272(b)(c)は、ストッパ3044を示す斜視図である。
図269に示すように、駆動側カートリッジカバー部材3016は、カムユニット3060を覆っており、カムユニット3060は、現像駆動入力ギア132(図265参照)に噛合するカム駆動ギア3061を有している。カム駆動ギア3061は、駆動伝達軸3064の一端側(駆動側)に、駆動伝達軸3064に対して相対可能に支持されている。駆動伝達軸3064の他端側(非駆動側)には、駆動側と同様のリンクユニット及びカムユニットが設けられ、非駆動側のカムユニットは、駆動伝達軸3064から伝達された駆動力によって駆動する。なお、本実施例では、プロセスカートリッジ3000の駆動側及び非駆動側のそれぞれにリンクユニット3040及びカムユニット3060を設けたが、リンクユニット3040及びカムユニット3060を駆動側及び非駆動側のいずれか一方のみに設けてもよい。
図264及び図269に示すように、リンクユニット3040は、ストッパリンク3041と、リンクカム3042と、リンクばね3043と、ストッパ3044と、を有している。ストッパリンク3041は、長孔3041aと、丸孔3041bと、揺動軸Kの軸線方向に突出するボス部3041cと、を有している。丸孔3041bには、駆動側カートリッジカバー部材3016に設けられた軸部3016dが貫通し、ストッパリンク3041は、軸部3016dを中心に回転可能に支持されている。
また、ストッパリンク3041の長孔3041aには、移動部材152Rに形成されたリンク係合部152Riが遊嵌している。そして、移動部材152Rが第二支持部127e(図265参照)を中心に矢印BA方向又は矢印BB方向に揺動すると、リンク係合部152Riが長孔3041aの内周面を押圧し、ストッパリンク3041が軸部3016dを中心に回転する。
図264、図269~図270(b)及び図272(a)に示すように、駆動側カートリッジカバー部材3016には、軸部3016dとは反対側に突出する軸部3016eが設けられている。リンクカム3042には、丸孔3042aと、丸孔3042aの軸方向に直交する径方向に延びる長孔3042bと、が形成されている。丸孔3042aは、軸部3016eの大径部3016fに遊嵌しており、リンクカム3042は、大径部3016fを中心に回転可能に支持されている。長孔3042bには、ストッパリンク3041のボス部3041cが貫通している。このようにストッパリンク3041のボス部3041cとリンクカム3042の長孔3042bとが連結されているため、ストッパリンク3041が軸部3016dを中心に回転するのに連動して、リンクカム3042が大径部3016fを中心に回転する。
更に、図272(a)に示すように、リンクカム3042は、略円弧状の当接面3042cと、当接面3042cの両端部に設けられ、当接面3042cよりも丸孔3042aから離れる方向に突出する滑り止め部3042d,3042eと、第1逃げ面3042f及び第2逃げ面3042gと、を有している。第1逃げ面3042f及び第2逃げ面3042gは、それぞれ略円弧状に形成されており、かつ当接面3042cよりも径方向において丸孔3042aに近い位置に配置されている。第1逃げ面3042fは、リンクカム3042の回転方向において、滑り止め部3042dを挟んで当接面3042cと反対側に設けられている。第2逃げ面3042gは、リンクカム3042の回転方向において、滑り止め部3042eを挟んで当接面3042cと反対側に設けられている。
図270(a)~図271(b)に示すように、駆動側カートリッジカバー部材3016には、ストッパ3044をスライド移動可能に支持するストッパ支持部3016hが設けられている。ストッパ支持部3016hは、第1支持部3016h1及び第2支持部3016h2を有しており、これら第1支持部3016h1及び第2支持部3016h2によって、カムユニット3060の回転中心と、リンクカム3042の回転中心と、を結んだ線に略平行な移動方向D30に延びる支持孔3016iが形成されている。支持孔3016iは、揺動軸K(図264参照)の軸線方向において貫通している。また、駆動側カートリッジカバー部材3016には、第1支持部3016h1に連続して形成され、カムユニット3060側に延びる受け部3016jが形成されている。
ストッパ3044は、図272(b)(c)に示すように、第1被支持部3044aと、第2被支持部3044bと、突き当て部3044cと、カム係止部3044dと、ばね掛け部3044eと、本体部3044fと、を有している。本体部3044fは、支持孔3016iに貫通するように構成されており、第1被支持部3044aは、駆動側カートリッジカバー部材3016の第2支持部3016h2を挟むように本体部3044fから突出している。第2被支持部3044bは、第1支持部3016h1を挟むように本体部3044fから突出している。このように、ストッパ3044の第1被支持部3044a及び第2被支持部3044bに第2支持部3016h2及び第1支持部3016h1がそれぞれ挿入されることで、ストッパ3044は、移動方向D30にスライド移動可能に案内される。
突き当て部3044cは、本体部3044fから移動方向D30における一方側に突出しており、カム係止部3044dは、本体部3044fから移動方向D30における他方側に突出している。突き当て部3044cは、リンクカム3042の当接面3042c、滑り止め部3042d,3042e、第1逃げ面3042f及び第2逃げ面3042gに対して摺動可能に設けられている。
カム係止部3044dは、カムユニット3060のカム3065に当接可能なカム当接面3044gと、カム当接面3044gの反対側に設けられる力受け面3044hと、を有している。力受け面3044hは、駆動側カートリッジカバー部材3016の受け部3016jに当接可能に構成されている。カム当接面3044g及び力受け面3044hは、それぞれ移動方向D30及び揺動軸Kの軸線方向に対して平行な方向に延びる面である。
図264及び図272(b)(c)に示すように、ストッパ3044のばね掛け部3044eと、軸部3016eの小径部3016gと、の間には、引張りばねから構成されるリンクばね3043が張設されている。ストッパ3044は、リンクばね3043の付勢力により、リンクカム3042に近づく方向に付勢されており、ストッパ3044の突き当て部3044cは、リンクカム3042の当接面3042c、滑り止め部3042d,3042e、第1逃げ面3042f及び第2逃げ面3042gに追従するように移動する。
[カムユニットの構成]
[カムユニットの構成]
次に、カムユニット3060の構成について説明する。図273及び図274は、カムユニット3060を示す分解斜視図である。図275は、カムユニット3060を示す断面図である。図276は、カムユニット3060を示す斜視図である。
図273~図276に示すように、カムユニット3060は、カム駆動ギア3061と、クラッチ部3062と、コイルばね3063と、カム3065と、蓋部3066と、を有している。カム駆動ギア3061は、駆動伝達軸3064が嵌合する支持孔3061aと、支持孔3061aに連続して設けられ、互いに180度位相を異ならせて径方向に延びる凹部3061b,3061cと、を有している。
クラッチ部3062は、駆動伝達軸3064が貫通する貫通孔3062aと、それぞれ凹部3061b,3061cに係合可能な係合部3062b,3062cと、軸線方向に延びる円筒部3062dと、カム3065が係合するカム係合部3062eと、を有している。コイルばね3063は、クラッチ部3062の円筒部3062dを締め付けて嵌合するコイル部3063aと、コイル部3063aの軸線方向における一端に設けられる一端部3063bと、コイル部3063aの軸線方向における他端に設けられる他端部3063cと、を有している。
保持部としてのカム3065は、ドラムユニット108と現像ユニット3009の相対的な位置を規制し、ドラムユニット108によって現像ユニット3009を離間位置で保持するための第1位置としての第2回転位置(図263(b)に示す位置)と、ドラムユニット108によって現像ユニット3009を現像位置で保持するための第2位置としての第1回転位置(図263(a)に示す位置)と、の間を回転可能に構成されている。カム3065は、軸線方向に延びる円筒部3065bと、円筒部3065bの外周面から径方向外側に突出するカム部3065cと、互いに180度位相を異ならせて円筒部3065bの外周面から径方向外側に延びるストッパ当接部3065d,3065eと、を有している。カム部3065cには、現像カバー部材3028の当接部3028d(図263(b)参照)を押圧可能なカム面3065aが形成されている。円筒部3065bには、コイルばね3063の一端部3063bが係止される溝状のばね掛け部3065fが形成されている。
蓋部3066は、小径部3066bと、小径部3066bよりも外径が大きい中径部3066cと、中径部3066cよりも外径が大きい大径部3066dと、を有している。これら小径部3066b、中径部3066c及び大径部3066dは、同軸上に一体に設けられており、駆動伝達軸3064が貫通する貫通孔3066aを有している。中径部3066cには、コイルばね3063の他端部3063cが係止される溝状のばね掛け部3066eが形成されている。大径部3066dには、駆動伝達軸3064に設けられ、駆動伝達軸3064と一体に回転する平行ピン3067が係合する溝状のピン係合部3066fが形成されている。平行ピン3067とピン係合部3066fとが係合することで、カムユニット3060は、駆動伝達軸3064に対して抜け止めされている。
[カムユニットの動作]
[カムユニットの動作]
次に、カムユニット3060の動作について図277(a)~図280(b)を用いて説明する。図277(a)は、現像ユニット3009が現像位置に位置する際のリンクユニット3040及びカムユニット3060を示す断面図である。図277(b)は、ストッパ3044及びカム3065の係合状態を示す断面図である。図278(a)は、現像ユニット3009が現像位置から離間位置へ移動開始する直前のリンクユニット3040及びカムユニット3060を示す断面図である。図278(b)は、ストッパ3044及びカム3065の離間状態を示す断面図である。図279(a)は、現像ユニット3009が離間位置に位置する際のリンクユニット3040及びカムユニット3060を示す断面図である。図279(b)は、ストッパ3044及びカム3065の係合状態を示す断面図である。図280(a)は、現像ユニット3009が離間位置から現像位置へ移動開始する直前のリンクユニット3040及びカムユニット3060を示す断面図である。図280(b)は、ストッパ3044及びカム3065の離間状態を示す断面図である。
図263(a)及び図277(a)(b)に示すように、現像ユニット3009が現像位置に位置する状態では、カム3065は、カム部3065cが現像カバー部材3028の当接部3028dとは反対側に位置する第1回転位置となっている。カム3065が第1回転位置に位置する状態では、カム面3065aは、現像カバー部材3028の当接部3028dから離間している。このとき、ストッパ3044の突き当て部3044cは、リンクカム3042の当接面3042cによって押圧されており、ストッパ3044は、リンクばね3043の付勢力に抗してカム3065側に押し出されている。なお、突き当て部3044cは、当接面3042cの両端部に設けられた滑り止め部3042d,3042eによって、振動等があったとしても安定的に当接面3042cに当接している。
そして、カム3065のストッパ当接部3065eは、ストッパ3044に係合している。より具体的には、カム3065のストッパ当接部3065eは、突き当て面3065gを有しており、突き当て面3065gは、位置決め部としてのストッパ3044のカム当接面3044gに突き当たっている。これにより、カム3065は、第1回転位置に位置決めされている。
現像ユニット3009が現像位置に位置している状態では、印刷動作時に現像駆動入力ギア132の現像カップリング部132aに画像形成装置本体170から駆動が入力される。より詳しくは、駆動力受け部としての現像カップリング部132a(図263(a)参照)は、現像ローラ106を回転駆動するための駆動力を受けて所定方向としての矢印V2方向に回転可能である。これにより、現像駆動入力ギア132が回転し、現像駆動入力ギア132に噛合するカム駆動ギア3061が回転する。カム駆動ギア3061は、図273及び図276(a)(b)に示すように、クラッチ部3062の係合部3062b,3062cに係合しているため、クラッチ部3062はカム駆動ギア3061と一体に、矢印R10方向に回転する。
カム3065は、ストッパ3044と係合しているため、矢印R10方向への回転が規制されている。この時、コイルばね3063のコイル部3063aがクラッチ部の円筒部3062d並びに蓋部3066の小径部3066bを締め付けることにより、蓋部3066は、カム3065に対して矢印R10方向にわずかに相対回転する。すると、一端部3063bがカム3065のばね掛け部3065fに係止され、かつ他端部3063cが蓋部3066のばね掛け部3066eに係止されたコイルばね3063は、コイル部3063aが緩む方向に所定量回転する。このため、クラッチ部3062から、カム3065、コイルばね3063及び蓋部3066に駆動力が伝達されなくなり、これらカム3065、コイルばね3063及び蓋部3066は、回転せずに停止する。なお、コイル部3063aとカム3065の円筒部3065bの内径面との間には、図275に示すように、コイル部3063aが所定量緩んで径方向外側に拡径可能なように隙間SP30が設けられている。
このように、コイル部3063aが緩むことにより、コイル部3063aによるクラッチ部3062の円筒部3062dへの締め付け力が弱まり、コイル部3063aと円筒部3062d及び小径部3066bとの間の摩擦力が低下する。これにより、クラッチ部3062から、カム3065、コイルばね3063及び蓋部3066に駆動力が伝達されなくなり、コイルばね3063に対してカム駆動ギア3061及びクラッチ部3062が矢印R10方向に空転する。そして、カム3065、コイルばね3063及び蓋部3066は、回転せずに停止する。すなわち、クラッチ部3062、コイルばね3063及び蓋部3066は、カム3065がストッパ3044によって第1回転位置又は第2回転位置で位置決めされている際に、現像カップリング部132aからカム3065への駆動を遮断可能なクラッチ3090(図274参照)を構成している。
現像駆動入力ギア132が回転し始める際には、ストッパ3044のカム当接面3044gは、突き当て面3065gから回転力を受けるが、ストッパ3044のカム当接面3044gとは反対側に形成された力受け面3044hが、受け部3016jに当接している。受け部3016jは、カム3065の回転方向である矢印R10方向に対して略直交する方向に延びており、かつストッパ3044のカム当接面3044g及び力受け面3044hよりも矢印R10方向における下流に位置している。これにより、ストッパ3044がカム3065から受けた回転力は、ストッパ3044を介して、駆動側カートリッジカバー部材3016の受け部3016jに伝達されるので、ストッパ3044の位置ずれや変形を抑制することができ、カム3065の動作安定性を向上できる。
現像ユニット3009を現像位置から離間位置に揺動させる際には、図278(a)(b)に示すように、離間制御部材196R(図25参照)がホーム位置から矢印W41方向に移動することにより、離間制御部材196Rに押圧されて移動部材152Rが矢印BA方向に回転する。そして、移動部材152Rの回転に連動して、ストッパリンク3041及びリンクカム3042が回転し、同時にストッパ3044がリンクばね3043の付勢力によってカム3065から離れる方向に移動する。このとき、ストッパ3044の突き当て部3044cは、リンクカム3042の当接面3042c及び滑り止め部3042d上を滑り、第1逃げ面3042fに当接する。
ストッパ3044がカム3065から離れる方向に移動することで、ストッパ3044とカム3065との係合状態が解除され、カム3065の矢印R10方向への回転規制が解除される。カム3065の回転規制が解除されることで、コイルばね3063のコイル部3063aが締まり(縮径し)、コイル部3063aによるクラッチ部3062の円筒部3062d並びに蓋部3066の小径部3066bへの締め付け力が回復する。このため、コイル部3063aと円筒部3062dとの間の摩擦力並びにコイル部3063aと小径部3066bとの間の摩擦力が増大し、クラッチ部3062、コイルばね3063及び蓋部3066が一体に回転する。そして、カム3065も、コイルばね3063を介して、クラッチ部3062及び蓋部3066と一体に回転する。このため、現像駆動入力ギア132の駆動力により、カムユニット3060全体が一体的に矢印R10方向に回転する。
離間制御部材196R(図25参照)は、ホーム位置から矢印W41方向に一時的に移動した後、すぐに矢印42方向に移動し、ホーム位置に戻る。すると、図279(a)(b)に示すように、離間制御部材196Rに押圧されて移動部材152Rが矢印BB方向に回転する。そして、移動部材152Rの回転に連動して、ストッパリンク3041及びリンクカム3042が回転し、同時にストッパ3044がリンクばね3043の付勢力に抗してカム3065に近づく方向に移動する。これは、ストッパ3044の突き当て部3044cが、リンクカム3042の第1逃げ面3042f及び滑り止め部3042d上を滑り、当接面3042cに当接するためである。
現像駆動入力ギア132の駆動力によって矢印R10方向に回転したカム3065は、図277(a)~図278(b)に示す第1回転位置から180度回転して第2回転位置に至り、ストッパ3044に突き当たる。より具体的には、カム3065のストッパ当接部3065dは、突き当て面3065hを有しており、突き当て面3065hは、ストッパ3044のカム当接面3044gに突き当たっている。これにより、カム3065は、第2回転位置に位置決めされている。
図263(b)及び図279(a)(b)に示すように、カム面3065aは、カム3065が第2回転位置に位置している場合、現像カバー部材3028の当接部3028dに当接している。カム3065が第1回転位置から第2回転位置に回転する際に、カム面3065aによって当接部3028dが押圧される。これにより、現像ユニット3009は、現像加圧ばね134(図34参照)の付勢力及び現像カップリング部132aが画像形成装置本体170から受ける駆動トルクに抗して、現像位置から離間位置に揺動する。突き当て面3065hがカム当接面3044gに突き当たった状態でのカムユニット3060の動作は、図277(a)(b)で説明したものと同様であるため、説明を省略する。
現像ユニット3009を離間位置から現像位置に揺動させる際には、図280(a)(b)に示すように、離間制御部材196R(図25参照)がホーム位置から矢印W42方向に移動することにより、離間制御部材196Rに押圧されて移動部材152Rが矢印BB方向に回転する。そして、移動部材152Rの回転に連動して、ストッパリンク3041及びリンクカム3042が回転し、同時にストッパ3044がリンクばね3043の付勢力によってカム3065から離れる方向に移動する。このとき、ストッパ3044の突き当て部3044cは、リンクカム3042の当接面3042c及び滑り止め部3042e上を滑り、第2逃げ面3042gに当接する。
ストッパ3044がカム3065から離れる方向に移動することで、ストッパ3044とカム3065との係合状態が解除され、カム3065の矢印R10方向への回転規制が解除される。ストッパ3044とカム3065との係合状態が解除された場合のカムユニット3060の動作は、図278(a)(b)で説明したものと同様であるため、説明を省略する。すなわち、現像駆動入力ギア132の駆動力により、カムユニット3060全体が一体的に矢印R10方向に回転する。
離間制御部材196R(図25参照)は、ホーム位置から矢印W42方向に一時的に移動した後、すぐに矢印W41方向に移動し、ホーム位置に戻る。すると、図277(a)(b)に示すように、離間制御部材196Rに押圧されて移動部材152Rが矢印BA方向に回転する。そして、移動部材152Rの回転に連動して、ストッパリンク3041及びリンクカム3042が回転し、同時にストッパ3044がリンクばね3043の付勢力に抗してカム3065に近づく方向に移動する。これは、ストッパ3044の突き当て部3044cが、リンクカム3042の第2逃げ面3042g及び滑り止め部3042e上を滑り、当接面3042cに当接するためである。
現像駆動入力ギア132の駆動力によって矢印R10方向に回転したカム3065は、図279(a)~図280(b)に示す第2回転位置から180度回転して第1回転位置に至り、ストッパ3044に突き当たる。図263(a)に示すように、カム3065が第2回転位置から第1回転位置に回転する際に、カム面3065aが現像カバー部材3028の当接部3028dから離間する。これにより、現像ユニット3009は、現像加圧ばね134(図34参照)の付勢力及び現像カップリング部132aが画像形成装置本体170から受ける駆動トルクによって、離間位置から現像位置に揺動する。
以上のように、本実施例では、一方向のみに回転する現像カップリング部132aの駆動力から、カム3065を矢印R10方向に回転させるための駆動力を得ている。言い換えれば、カム3065は、現像カップリング部132aが矢印V2方向に回転するように受けた力により、第2回転位置から第1回転位置へと回転可能で、かつ現像カップリング部132aが矢印V2方向に回転するように受けた力により、第1回転位置から第2回転位置へと回転可能である。カム3065は、現像カップリング部132aが矢印V2方向に回転するように受けた力により、一方向、すなわち矢印R10方向にのみ回転する。そして、離間制御部材196Rが移動して移動部材152Rを回転させることで、リンクユニット3040のストッパ3044がカム3065に対して係合又は離間し、カム3065を第1回転位置又は第2回転位置に位置決めするように構成している。このため、カム3065を回転させるための専用の駆動源が不要であり、コストダウンできる。また、一方向のみに回転する現像駆動入力ギア132の駆動を利用してカム3065を回転させるので、正転駆動及び逆転駆動を必要とする構成に比して、構成を簡単化できる。
カム3065は、第1回転位置(図263(a)に示す位置)において、現像ユニット3009を現像位置に安定的に保持し、第2回転位置(図263(b)に示す位置)において、現像ユニット3009を離間位置に安定的に保持する。このように、カム3065によって現像ユニット3009を現像位置と離間位置との間で揺動させるので、メカ的な信頼性が高く、耐久性を向上できる。
また、カム3065は現像駆動入力ギア132の駆動力によって駆動され、離間制御部材196Rはストッパ3044の位置を切り換えるために移動されるので、離間制御部材196Rの移動に必要なトルクを低減できる。このため、離間制御部材196Rを駆動するためのモータ等の駆動源を小型化及びコストダウンできると共に、離間制御部材196R及び移動部材152Rに必要な剛性を低減できる。
次に、図281~図296(c)を用いて、実施例31について説明する。本実施例では、前述した実施例1と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。本実施例では、実施例1のスペーサ151Rに代えて、保持部材3120によって現像ユニット3109を現像位置又は離間位置で保持している。なお、本実施例においても移動部材152Rは現像ユニット3109に設けられている。
[全体構成]
[全体構成]
まず、カートリッジとしてのプロセスカートリッジ3100の全体構成を説明する。図281は、保持部材3120及び離間ばね3140を示す斜視図である。図282は、図281の265A−265A断面図である。図283及び図284は、駆動側カートリッジカバー部材116、現像カバー部材128、保持部材3120及び離間ばね3140を示す分解斜視図である。
図281及び図282に示すように、本実施例に係るプロセスカートリッジ3100は、ドラムユニット108と、ドラムユニット108に対して回動可能な現像ユニット3109と、を有している。第2ユニットとしての現像ユニット3109は、現像ローラ106を有しており、現像ローラ106は、金属材料の芯金106cと、芯金106cの外周面に固定されるゴム部106dと、を有している。芯金106cの端部106eには、保持部材3120が回転可能に支持されている。
図283及び図284に示すように、駆動側カートリッジカバー部材116は、現像ユニット3109の駆動側の側面を覆っており、現像ユニット3109の揺動軸Kを中心に現像カバー部材128を回転可能に支持している。現像ローラ106は、矢印R21方向に回転する。現像ローラ106の芯金106cは、現像ユニット3109の駆動側軸受126によって回転可能に支持されており、芯金106cには、現像ローラギア131が固定されている。現像ローラギア131は、現像カップリング部132aによって画像形成装置本体170から駆動トルクを受ける現像駆動入力ギア132(図15参照)に噛合している。現像駆動入力ギア132の駆動力受け部としての現像カップリング部132a(図263(a)参照)は、現像ローラ106を回転駆動するための駆動力を受けて所定方向としての矢印V2方向に回転可能である。
[保持部材及び離間ばねの構成]
[保持部材及び離間ばねの構成]
次に、保持部材3120及び離間ばね3140の構成について詳しく説明する。保持部としての保持部材3120は、ドラムユニット108と現像ユニット3109の相対的な位置を規制し、ドラムユニット108によって現像ユニット3109を離間位置で保持するための第1位置としての離間保持位置(図281に示す位置)と、ドラムユニット108によって現像ユニット3109を現像位置で保持するための第2位置としての当接保持位置(図286(a)に示す位置)と、の間を回転可能に構成されている。保持部材3120は、長丸孔形状の孔部3120aと、径方向外側に突出する凸部3120bと、軸線方向に延びる円筒部3120cと、を有している。孔部3120aには、芯金106cの端部106eが貫通している。孔部3120aは、その内周面に、摩擦面3120dと、対向面3120eと、有している。これら摩擦面3120d及び対向面3120eは、長丸孔形状の孔部3120aの延び方向において、互いに対向しており、摩擦面3120dは、対向面3120eよりも凸部3120bに近い。
円筒部3120cには、離間ばね3140のコイル状の支持部3140aが回転可能に支持されており、支持部3140aから径方向外側に突出する固定部3140bは、保持部材3120の凸部3120bに設けられたバネ固定部3120fに固定される。支持部3140aから径方向外側に突出する支持部3140cは、現像カバー部材128に設けられたバネ支持部128fに支持される。付勢部としての離間ばね3140は、保持部材3120を付勢する。
図281に示すように、保持部材3120の凸部3120bには、孔部3120aの延び方向における端部に設けられた保持面3120gと、凸部3120bの矢印R21方向における下流側の係止面3120hと、凸部3120bの矢印R21方向における上流側の係止面3120iと、を有している。現像カバー部材128には、係止面3120iと当接可能な係止面128iが形成されている。
駆動側カートリッジカバー部材116には、保持面3120gと当接可能な被保持部116gと、係止面3120hと対向する被係止部116hと、係止面3120iと対向可能な被係止部116iと、を有している。被係止部116h,116iは、凸部3120bの周方向における幅以上の隙間を開けて互いに対向している。
離間ばね3140の固定部3140bと支持部3140cとがなす角は、略90~120°である。離間ばね3140が保持部材3120及び現像カバー部材128に組付けられた状態では、離間ばね3140の支持部3140cは、矢印R21方向に付勢された状態でチャージされている。
[保持部材及び離間ばねの動作]
[保持部材及び離間ばねの動作]
次に、保持部材3120及び離間ばね3140の動作について説明する。図285(a)は、現像駆動入力ギア132に画像形成装置本体170から駆動力が入力されていない状態において、保持部材3120及び離間ばね3140に作用する力を説明するための側面図である。
図285(a)に示すように、離間ばね3140は、固定部3140bが矢印R22方向に付勢され、かつ支持部3140cが矢印R21方向に付勢されるようにチャージされている。このため、固定部3140bから保持部材3120のバネ固定部3120fに対して、力F41が作用している。また、支持部3140cがバネ支持部128fを押圧する力を受けて、支持部3140aから保持部材3120の円筒部3120cに対して、力F42が作用している。更に、現像ローラ106の芯金106cには、現像加圧ばね134(図34参照)の付勢力により、加圧力F40が作用している。
力F41は、保持部材3120に対して、矢印R22方向に回転するような力として作用するが、係止面3120iが現像カバー部材128の係止面128iに突き当たることで、保持部材3120は矢印R22方向の回転が規制されている。また、力F42及び加圧力F40は、保持部材3120が駆動側カートリッジカバー部材116の被保持部116gに近づく方向の力として作用するが、保持面3120gが被保持部116gに突き当たることで、保持部材3120の移動が規制されている。このように、保持部材3120が駆動側カートリッジカバー部材116の被保持部116gに対して突っ張った状態となることで、現像ローラ106と感光ドラム104とが互いに離間し、現像ユニット3109が離間位置で保持される。
図285(b)は、現像ユニット3109が離間位置に位置する状態において、現像駆動入力ギア132に駆動力が入力された様子を示す側面図である。保持部材3120の保持面3120gは、被保持部116gから反力NN1を受ける。なお、保持部材3120は、離間ばね3140から反力NN1とは反対方向の力F42を受けるが、力F42は、反力NN1よりも十分に小さいものとする。
反力NN1によって、保持部材3120の摩擦面3120dに対して、芯金106cからの反力−NN1が発生する。現像ユニット3109が離間位置に位置する状態において、現像駆動入力ギア132に駆動力が入力されると、芯金106cが矢印R21方向に回転する。そして、回転軸としての芯金106cと保持部材3120の摩擦面3120dとの間には、反力−NN1による摩擦力F43が発生する。摩擦力F43によって、保持部材3120には、矢印R21方向に回転する回転力C43が発生する。また、保持部材3120には、上述した離間ばね3140の付勢力による力F41が作用し、力F41は、保持部材3120に対して、矢印R22方向に回転するような力として作用する。すなわち、保持部材3120には、保持部材3120を離間保持位置から当接保持位置へ付勢する第1方向(矢印R21方向)の第1モーメントとしての回転力C43と、第1方向とは反対の第2方向(矢印R22方向)の第2モーメントとしての力F41とが作用する。
このため、回転力C43が力F41よりも大きくなると、保持部材3120は矢印R21方向に回転し始める。本実施例では、現像駆動入力ギア132に駆動力が入力されることで保持部材3120が矢印R21方向に回転し始めるように、摩擦面3120dの摩擦係数、現像加圧ばね134のばね圧、及び離間ばね3140のばね圧を設定している。
図286(a)は、現像ユニット3109が現像位置に位置する状態での、保持部材3120及び離間ばね3140の作用を説明するための側面図である。保持部材3120が矢印R21方向に回転することで、保持部材3120の保持面3120gと被保持部116gとの当接が解除される。保持部材3120は、係止面3120hが被係止部116hに突き当たることで、矢印R21方向の回転を規制できる。
また、保持部材3120は、加圧力F40及び力F42によって、駆動側カートリッジカバー部材116の第2被保持部116jに向けて移動する。これにより、保持部材3120の保持面3120gは、第2被保持部116jに突き当たる。この時、保持部材3120は、孔部3120aの略中央部に芯金106cが位置するように移動する。このように、保持部材3120が駆動側カートリッジカバー部材116の被保持部116gに対して突っ張った状態が解除されることで、現像ローラ106が感光ドラム104に当接し、現像ユニット3109は現像位置で保持される。
そして、芯金106cが孔部3120aの略中央部に位置する状態では、芯金106cと孔部3120aの摩擦面3120dは離間するので、図285(b)で説明した摩擦力F43が0となる。芯金106cと孔部3120aは、摩擦面3120d及び対向面3120e以外の面においてわずかに接触しているので、保持部材3120の回転力C43は小さくなり、回転力C43’(<C43)となる。これにより、回転力C43’が保持部材3120を矢印R22方向に回転させようとする力F41よりも小さくなり、保持部材3120は矢印R22方向に回転する。そして、保持部材3120は、係止面3120iが被係止部116iに突き当たることで、矢印R22方向の回転が規制される。
図286(b)は、現像ユニット3109が離間位置よりも更にドラムユニット108に対して離れた位置(以下、第2離間位置とする)に位置した状態での、保持部材3120及び離間ばね3140の作用を説明するための斜視図である。現像ユニット3109は、離間制御部材196Rが移動部材152Rを押圧することで、第2離間位置に位置する。そして、保持部材3120に離間ばね3140のばね力に起因する力F42が作用することで、保持部材3120は、駆動側カートリッジカバー部材116の被保持部116gに近づく方向に移動する。これにより、芯金106cは、保持部材3120の対向面3120eに当接する。
保持部材3120には、芯金106cからの反力NN2が作用し、芯金106cが回転することで、摩擦力F44が発生する。摩擦力F44によって、保持部材3120には、矢印R21方向に回転する回転力C44が発生する。また、保持部材3120には、上述した力F41が作用し、力F41は、保持部材3120に対して、矢印R22方向に回転するような力として作用する。すなわち、保持部材3120には、第1方向(矢印R21方向)の第3モーメントとしての回転力C44と、第1方向とは反対の第2方向(矢印R22方向)の第4モーメントとしての力F41とが作用する。
本実施例では、力F41の方が回転力C44よりも大きくなるように設定され、保持部材3120は矢印R22方向に回転する。なお、現像ユニット3109が現像位置から第2離間位置へ、すなわち離間位置へ向けて移動させられ、かつ現像カップリング部132aが駆動力を受けた状態で、力F41は回転力C44よりも大きくなる。そして、保持部材3120の係止面3120iが現像カバー部材128の係止面128iに突き当たることで、保持部材3120は矢印R22方向の回転が規制される。この時、保持面3120gは、被保持部116gに対向している。
この後、離間制御部材196Rによる移動部材152Rの押圧が解除されると、現像加圧ばね134の付勢力及び現像駆動入力ギア132の駆動力の作用により、保持部材3120の保持面3120gが被保持部116gに突き当たり、図285(a)の状態に戻る。
このように、本実施例では、一方向のみに回転する現像駆動入力ギア132の駆動力から、保持部材3120を矢印R21方向に回転させるための駆動力を得ている。すなわち、保持部材3120は、現像駆動入力ギア132の駆動力によって、現像ユニット3109を離間位置で保持する離間保持位置から、現像ユニット3109を現像位置で保持する当接保持位置に回転する。このため、保持部材3120を回転させるための専用の駆動源が不要であり、コストダウンできる。
また、現像ユニット3109を離間位置から現像位置に揺動させる際には、現像駆動入力ギア132を駆動するだけで自動的に保持部材3120が離間保持位置から当接保持位置に回転する。このため、離間制御部材196Rを駆動させるための駆動力が不要であり、省エネ化することができる。また、現像ユニット3109を現像位置から離間位置に揺動させる際には、離間ばね3140のばね力によって保持部材3120を当接保持位置から離間保持位置に回転させるので、省エネ化することができる。また、一方向のみに回転する現像駆動入力ギア132の駆動を利用して保持部材3120を回転させるので、正転駆動及び逆転駆動を必要とする構成に比して、構成を簡単化できる。
[遅延機構の構成]
[遅延機構の構成]
ところで、保持部材3120は、現像駆動入力ギア132に駆動が入力すると、速やかに離間保持位置から当接保持位置に回転する。このため、現像ユニット3109の現像ローラ106は、現像駆動入力ギア132に駆動が入力されてすぐに、感光ドラム104に対して当接してしまう。
現像ローラ106は、感光ドラム104上の静電潜像を現像する時以外は、極力、感光ドラム104に対して離間している方が、寿命が長くなる。そこで、本実施例では、現像駆動入力ギア132に駆動が入力されてから、現像ローラ106が回転開始するまでの時間を遅延させる遅延機構3200を設け、現像ローラ106の更なる長寿命化を図っている。
以下、遅延機構3200の構成について詳しく説明する。図287及び図288は、遅延機構3200を示す分解斜視図である。図289は、遅延機構3200を示す断面図である。現像駆動入力ギア132は、図287~図289に示すように、画像形成装置本体170から駆動が入力される現像カップリング部132aと、現像ローラギア131に噛合する出力ギア132bと、を有している。遅延機構3200は、現像カップリング部132aと、出力ギア132bと、の間に配置されており、現像カップリング部132aの駆動力を出力ギア132bに伝達又は遮断可能に構成されている。
遅延機構3200は、現像カップリング部132aから現像ローラ106までの間の駆動伝達経路に設けられている。遅延機構3200は、レバー3210と、クラッチ3220と、ばね3230と、を有している。現像カップリング部132aは、軸線方向D40に延びる円筒部132cと、円筒部132cの軸線方向D40における一端面に設けられ、出力ギア132bに向けて突出する突起部132d及び軸部132eと、を有している。突起部132dは、径方向に延びており、軸部132eは、軸線方向D40に延びている。軸部132eは、出力ギア132bに相対回転可能に支持されている。現像カップリング部132aは、現像カバー部材128によって、軸線方向D40における位置が規制されている。
レバー3210は、現像カップリング部132aの円筒部132cに回転可能に支持される円筒形状の支持部3211と、支持部3211の外周面から径方向外側に突出する係止部3212と、を有している。クラッチ3220は、現像カップリング部132aの円筒部132cに回転可能に支持される凹部3221と、凹部3221の底面に形成される係合溝3222と、係合溝3222の中央部に形成される貫通孔3223と、を有している。貫通孔3223には、現像カップリング部132aの軸部132eが貫通している。また、クラッチ3220は、径方向外側に突出する突起部3224,3225を有しており、これら突起部3224,3225は、互いに180度位相を異ならせて配置されている。
ばね3230は、圧縮コイルばねであり、クラッチ3220と出力ギア132bとの間で軸線方向D40に縮設されている。また、ばね3230は、クラッチ3220及び出力ギア132bに対して、それぞれ固定されている。出力ギア132bには、クラッチ3220の突起部3224,3225がそれぞれ侵入可能な扇形形状の溝部132f,132gが形成されている。突起部3224,3225は、それぞれ溝部132f,132g内に進入した状態で、所定の角度だけ回転可能に設けられている。
図290(a)は、現像カップリング部132aに駆動が入力されていない状態の遅延機構3200を示す斜視図である。図290(b)は、現像カップリング部132aに駆動が入力されていない状態のクラッチ3220、ばね3230及び出力ギア132bを示す斜視図である。図291は、現像カップリング部132aに駆動が入力され、現像カップリング部132aの駆動が出力ギア132bに伝達されている駆動伝達状態を示す斜視図である。
図290(a)(b)に示すように、現像カップリング部132aに駆動が入力されていない状態では、現像カップリング部132aの突起部132dは、クラッチ3220の係合溝3222に係合していない。言い換えれば、突起部132dは、回転方向において係合溝3222に対して位相がずれており、かつ遅延機構3200の軸線方向D40において、係合溝3222に対してオフセットしている。
また、クラッチ3220の突起部3224は、溝部132fの一端面132f1に対して矢印R31方向において空隙を存している。同様に、クラッチ3220の突起部3225は、溝部132gの一端面132g1に対して矢印R31方向において空隙を存している。
現像カップリング部132aが矢印R31方向に回転し、突起部132dと係合溝3222の位相が揃うと、ばね3230の付勢力によって、クラッチ3220が軸線方向D40における現像カップリング部132a側にスライド移動する。すると、突起部132dと係合溝3222が係合する。そして、突起部132dと係合溝3222が係合することで、現像カップリング部132aとクラッチ3220が一体に回転する。なお、この時、レバー3210は、回転停止したままである。
クラッチ3220が矢印R31方向に回転することで、図291に示すように、突起部3224は一端面132f1に当接し、突起部3225は一端面132g1に当接する。これにより、現像カップリング部132aの駆動力は、クラッチ3220を介して、出力ギア132bに伝達し、遅延機構3200は駆動伝達状態となる。
図292は、レバー3210と駆動側カートリッジカバー部材116及び現像カバー部材128との配置関係を示す斜視図である。図293(a)は、現像ユニット3109が現像位置に位置している際のレバー3210の位置を示す斜視図である。図293(b)は、現像ユニット3109が離間位置に位置している際のレバー3210の位置を示す斜視図である。
図287~図288及び図292に示すように、現像カバー部材128には、レバー3210の係止部3212が挿入される切欠き部128rが形成されている。切欠き部128rは、第1係止部128sと、第2係止部128uと、これら第1係止部128s及び第2係止部128uを接続する斜面128tと、を有している。第1係止部128s及び第2係止部128uは、レバー3210の係止部3212を係止可能に設けられており、第2係止部128uは、第1係止部128sよりも軸線方向D40において現像カップリング部132aに近い側に設けられている。
斜面128tは、軸線方向D40に対して傾斜するように設けられており、第1係止部128sと第2係止部128uとの間で、レバー3210の係止部3212を滑らかに案内する。
また、駆動側カートリッジカバー部材116には、レバー3210の係止部3212を係止する係止溝116sが設けられている。レバー3210は、係止部3212が矢印R31,R32方向において係止溝116sに係止されることで、駆動側カートリッジカバー部材116に対して矢印R31,R32方向における相対位置は変わることはない。係止部3212は、係止溝116sに対して軸線方向D40には摺動可能である。
現像カバー部材128は、現像ユニット3209と一体に揺動するので、現像ユニット3209が現像位置及び離間位置の間で揺動する際に、現像カバー部材128は、レバー3210に対して相対的に矢印R31,R32方向に回転する。
[遅延機構の動作]
[遅延機構の動作]
次に、遅延機構3200の動作について詳しく説明する。図294(a)は、現像カップリング部132aに駆動が入力されていない状態の遅延機構3200を示す断面図である。図294(b)は、現像カップリング部132aに駆動が入力されていない状態の遅延機構3200を示す斜視図である。図294(c)は、現像カップリング部132aの突起部132dと係合溝3222の位相が揃った状態を示す斜視図である。図294(d)は、クラッチ3220が軸線方向D40にスライド移動した様子を示す斜視図である。
図294(a)(b)に示すように、現像カップリング部132aに駆動が入力されていない状態では、現像カップリング部132aの突起部132dは、クラッチ3220の係合溝3222に係合していない。図294(b)(c)に示すように、現像カップリング部132aに駆動が入力されて、突起部132dと係合溝3222の位相が揃うと、ばね3230の付勢力によって、クラッチ3220が軸線方向D40における現像カップリング部132a側にスライド移動する。すると、図294(d)に示すように、突起部132dと係合溝3222が係合する。また、クラッチ3220は、軸線方向D40においてレバー3210に当接する。
図295(a)は、クラッチ3220が回転開始する直前の様子を示す斜視図である。図295(b)は、駆動伝達状態となった遅延機構3200を示す斜視図である。図295(a)(b)に示すように、クラッチ3220が回転開始する前には、クラッチ3220の突起部3224,3225は、それぞれ一端面132f1,132g1に対して矢印R31方向において空隙を存している。
クラッチ3220が矢印R31方向に回転することで、図295(c)に示すように、突起部3224は一端面132f1に当接し、突起部3225は一端面132g1に当接する。これにより、現像カップリング部132aの駆動力は、クラッチ3220を介して、出力ギア132bに伝達し、遅延機構3200は駆動伝達状態となる。なお、突起部3224,3225が一端面132f1,132g1にそれぞれ当接するまでに、クラッチ3220は、出力ギア132bに対して所定角度だけ矢印R31方向に相対的に回転する。ばね3230は、クラッチ3220及び出力ギア132bに固定されているので、クラッチ3220が矢印R31方向に所定角度回転することで、ばね3230が捻られ、弾性力がチャージされる。
遅延機構3200が駆動伝達状態となると、出力ギア132bによって現像ローラ106が回転し、保持部材3120が離間保持位置から当接保持位置に回転する(図286参照)。これにより、現像ユニット3109は、離間位置から現像位置に揺動する。この時、レバー3210は、駆動側カートリッジカバー部材116の係止溝116sによって係止されているため、姿勢は変化しない。一方で、現像ユニット3109と一体に揺動する現像カバー部材128は、駆動側カートリッジカバー部材116に対して揺動するので、レバー3210は、現像カバー部材128に対して相対的に回動する。これにより、レバー3210の係止部3212は、図293(a)に示すように、第2係止部128uに係止される。
現像ユニット3109が現像位置から離間位置に揺動する際には、まず離間制御部材196Rが移動部材152Rを押圧することで、現像ユニット3109を第2離間位置に位置させる。この時、レバー3210は、駆動側カートリッジカバー部材116の係止溝116sによって係止されているため、姿勢は変化しない。一方で、現像ユニット3109と一体に揺動する現像カバー部材128は、駆動側カートリッジカバー部材116に対して揺動するので、レバー3210は、現像カバー部材128に対して相対的に回動する。これにより、レバー3210の係止部3212は、図293(b)に示すように、第2係止部128uから斜面128tを上って、第1係止部128sに係止される。
このため、レバー3210は、軸線方向D40において、現像カップリング部132aから離れる方向に移動する。そして、レバー3210がクラッチ3220を押圧することで、図296(b)に示すように、クラッチ3220も軸線方向D40において、現像カップリング部132aから離れる方向に移動する。これにより、現像カップリング部132aの突起部132dとクラッチ3220の係合溝3222との係合が解除され、図296(c)に示すように、クラッチ3220は、ばね3230にチャージされた弾性力により、矢印R32方向に回転する。そして、突起部132dとクラッチ3220の係合溝3222との位相は、互いにずれた状態となり、図294(b)に示すように、遅延機構3200は初期状態に戻る。
以上のように、遅延機構3200によって、現像カップリング部132aに画像形成装置本体170から駆動が入力されてから、保持部材3120が離間保持位置から当接保持位置に回転するまでの時間を延ばすことができる。言い換えれば、伝達機構としての遅延機構3200は、現像カップリング部132aが受けた駆動力を現像ローラ106に対して所定の時間が経過後に伝達する。少なくとも現像カップリング部132aに駆動が入力されてから、現像カップリング部132aの突起部132dとクラッチ3220の係合溝3222との位相が合うまでの時間と、クラッチ3220の突起部3224,3225が出力ギア132bの一端面132f1,132g1にそれぞれ当接するまでの時間と、を合算した時間が経過するまでは、保持部材3120が回転開始することはない。これにより、現像ローラ106が感光ドラム104に当接している時間を短縮化し、現像ローラ106を長寿命化することができる。
<実施例30~31の変形例>
<実施例30~31の変形例>
なお、実施例30では、現像カップリング部132aの、現像ローラ106を回転駆動するための駆動力を受けて、カム駆動ギア3061が矢印R10方向に回転していたが、これに限定されない。例えば、カップリング部材143の、感光ドラム104を回転駆動するための駆動力を受けて、カム駆動ギア3061が矢印R10方向に回転するように構成してもよい。
また、実施例30では、移動部材152Rに連動してストッパ3044が移動するように構成されていたが、これに限定されない。例えば、ストッパ3044は、他の部材やアクチュエータによって移動するように構成されてもよい。
また、実施例30では、コイルばね3063を有するばねクラッチからなるクラッチ3090を用いていたが、これに限定されない。例えば、クラッチ3090に代えて、噛み合いクラッチや電磁クラッチ等の他のクラッチを適用してもよい。
また、実施例31では、現像カップリング部132aの、現像ローラ106を回転駆動するための駆動力を受けて、保持部材3120が矢印R21方向に回転していたが、これに限定されない。例えば、カップリング部材143の、感光ドラム104を回転駆動するための駆動力を受けて、保持部材3120が矢印R21方向に回転するように構成してもよい。
また、実施例31の遅延機構3200は、現像カップリング部132aの突起部132dとクラッチ3220の係合溝3222との位相が合うまでの時間と、クラッチ3220の突起部3224,3225が出力ギア132bの一端面132f1,132g1にそれぞれ当接するまでの時間と、を合わせた時間遅延可能となっているが、いずれか一方でもよい。また、遅延時間は、構成により適宜変更してもよい。
また、実施例30~28において、カム3065及び保持部材3120は、現像ユニットに回転可能に支持されていたが、これに限定されない。例えば、カム3065及び保持部材3120は、ドラムユニットに回転可能に支持されていてもよい。
また、既述の各実施例は、適宜組み合わせてもよい。例えば、実施例9のプロセスカートリッジに、実施例30の加圧ユニット2780を適用してもよい。
次に、図297(a)~図326(b)を用いて、実施例32について説明する。本実施例では、前述した実施例1と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。
[全体構成]
[全体構成]
まず、実施例32に係るカートリッジとしてのプロセスカートリッジ6100の全体構成を説明する。図297(a)は、駆動側から視たプロセスカートリッジ6100を示す斜視図であり、図297(b)は、現像ユニット6109を示す斜視図である。
図297(a)(b)に示すように、プロセスカートリッジ6100は、感光ドラム104及び帯電ローラ105(図3参照)を含むドラムユニット108と、現像ローラ106を含む現像ユニット6109と、これらドラムユニット108及び現像ユニット6109を支持する駆動側カートリッジカバー部材6116及び非駆動側カートリッジカバー部材6117と、を有している。感光ドラム104、帯電ローラ105、現像ローラ106、ドラムユニット108及び現像ユニット6109は、それぞれ感光体、帯電部材、現像部材、第1ユニット及び第2ユニットを構成している。
現像ユニット6109は、ドラムユニット108に対して、揺動軸Kを中心に当接位置(現像位置)と離間位置との間で移動可能であり、プロセスカートリッジ6100は、現像ユニット6109が現像位置に位置する状態において、現像ローラ106が感光ドラム104へトナーを付着させることが可能である。現像ユニット6109が離間位置に位置する状態において、現像ローラ106が感光ドラム104から隙間P(図313(b)参照)だけ離間して配置される。なお、実施例2(図44(b)等)に示したように、現像ローラ106の少なくとも一部は、感光ドラム104から離れて配置される構成であってもよい。感光ドラム104及び現像ローラ106は、それぞれ回転軸線M1,M2を中心に回転可能に支持されている。
[離間当接機構6150の構成]
[離間当接機構6150の構成]
以下では、現像ローラ106が、感光ドラム104に対して離間および当接を行う構成について詳細に説明する。図297(b)に示すように、現像ユニット6109は、駆動側に離間当接機構6150R、非駆動側に離間当接機構6150Lを有している。なお、離間当接機構について、駆動側の離間当接機構6150Rの詳細を説明するが、非駆動側の離間当接機構6150Lに関しても同様の機構を有する。また、離間当接機構については駆動側、非駆動側ほぼ同一機能を有しているため、駆動側については各部材の符号にRを付す。非駆動側については各部材の符号を駆動側と同一にして、Lを付す。
図298は、駆動側の離間当接機構6150Rを示す斜視図である。図299(a)は、被押圧部材6152Rがカートリッジ押圧機構191(図316(a)参照)によって押し込まれていない状態の離間当接機構6150Rを示す断面図である。図299(b)は、被押圧部材6152Rがカートリッジ押圧機構191によって押し込まれた状態の離間当接機構6150Rを示す断面図である。
図298に示すように、離間当接機構6150Rは、駆動側軸受6126と、圧縮ばね6153R,6163Rと、被押圧部材6152Rと、段ギア6161Rと、移動部材6162Rと、保持部材6151Rと、現像カバー部材6128と、を有している。
詳しくは後述するが、図299(a)(b)に示すように、被押圧部材6152Rがカートリッジ押圧機構191(図316(a)参照)によって押し込まれてZB方向に移動すると、移動部材6162Rは、図299(a)に示す待機位置から図299(b)に示す突出位置に、ZB方向に移動する。このとき、被押圧部材6152RのZB方向の移動量が移動量D60なのに対し、移動部材6162RのZB方向の移動量は、移動量D60よりも大きい移動量D61である。これは、被押圧部材6152Rの移動が、段ギア6161Rによって増速されるためである。なお、本実施例では、段ギア6161Rの大径ギア部6161Rb(図303(a)参照)と小径ギア部6161Rcのギア比が2:1であるため、移動量D61は、移動量D60の2倍となる。
また、移動部材6162RがZB方向に移動すると、圧縮ばね6153Rを介して保持部材6151RはZB方向に押圧され、保持部材6151RもZB方向に移動する。圧縮ばね6163Rの付勢力によって被押圧部材6152Rが−ZB方向に移動すると、移動部材6162R及び保持部材6151Rも−ZB方向に移動する。
なお、ZB方向及びZB方向とは反対の−ZB方向は、現像ユニット6109を基準に設定される方向である。すなわち、ZB方向及び−ZB方向は、被押圧部材6152R、移動部材6162R及び保持部材6151Rの移動方向であって、現像ユニット6109が揺動軸Kを中心に当接位置(現像位置)と離間位置との間で揺動することで、水平方向(X1方向及びX2方向)や鉛直方向(Z1方向及びZ2方向)に対する相対的な方向が変化する。
また、本実施例では、ZB方向及び−ZB方向に直交する方向をXB方向及び−XB方向とし、XB方向は、現像ユニット6109がドラムユニット108に対して離れる側の方向である。なお、現像ユニット6109が離間位置に位置する状態では、カートリッジ押圧機構191(図316(a)参照)が被押圧部材6152Rを押し込む方向であるZA方向と、被押圧部材6152R、移動部材6162R及び保持部材6151Rの移動方向であるZB方向とは、実質的に平行である。
図300(a)は、現像カバー部材6128を示す斜視図であり、図300(b)は、移動部材6162Rを示す斜視図である。図301(a)は、保持部材6151Rを示す斜視図であり、図301(b)は、保持部材6151Rを示す他の斜視図である。図302(a)は、駆動側軸受6126を示す斜視図であり、図302(b)は、被押圧部材6152Rを示す斜視図である。図303(a)は、段ギア6161Rを示す斜視図であり、図303(b)は、段ギア6161Rを示す他の斜視図である。
図300(a)に示すように、現像カバー部材6128は、移動部材支持面6128a,6128bと、保持部材支持面6128c,6128dと、突き当て面6128eと、規制面6128fと、を有している。移動部材支持面6128a,6128bは、互いに対向するように配置され、移動部材6162RをZB方向へ移動可能に支持する。保持部材支持面6128c,6128dは、互いに対向するように配置され、保持部材6151RをZB方向へ移動可能に支持する。移動部材支持面6128a,6128b及び保持部材支持面6128c,6128dは、ZB方向に延びている。
突き当て面6128eは、保持部材支持面6128c,6128dのZB方向における上流端を接続するように形成され、保持部材6151Rに突き当たることで保持部材6151Rの−ZB方向への移動を規制する。規制面6128fは、ZB方向に沿って延びており、移動部材6162R及び段ギア6161RのY2方向への移動を規制する。Y2方向及びY2方向と反対のY1方向は、揺動軸Kの軸線方向に平行な方向である。
図300(b)に示すように、移動部材6162Rは、全体として略L字状に形成されている。移動部材6162Rは、被支持面6162Ra,6162Rbと、係止部6162Rcと、突き当て面6162Rdと、上昇規制面6162Reと、ラックギア6162Rfと、ばね座6162Rgと、ボス6162Rhと、を有している。
被支持面6162Ra,6162Rbは、現像カバー部材6128の移動部材支持面6128a,6128bによってZB方向に移動可能に支持される。係止部6162Rcは、Y1方向に臨むように形成され、Y1方向に関して下流側に配置された保持部材6151Rと当接することで、保持部材6151RのY2方向への移動が規制される。突き当て面6162Rdは、保持部材6151Rが突き当たることで、保持部材6151RのZB方向への移動を規制する。上昇規制面6162Reは、保持部材6151Rが突き当たることで、保持部材6151Rの−ZB方向への移動を規制する。
ラックギア6162Rfは、図300(b)では平面として図示されているが、ZB方向に並んだ複数の歯を有し、段ギア6161Rの大径ギア部6161Rb(図303(a)参照)と噛合う。ばね座6162Rgは、ZB方向下流側に臨んだ面であり、圧縮ばね6153Rの一端部を支持する。ばね座6162Rgからは、ボス6162RhがZB方向に突出しており、ボス6162Rhには、圧縮ばね6153Rの一端部が挿入される。
図301(a)(b)に示すように、保持部材6151Rは、ZB方向に延びると共に現像カバー部材6128の保持部材支持面6128c,6128dによってZB方向に移動可能に支持される被ガイド部6151Rdと、被ガイド部6151RdのZB方向における上流端部から−XB方向に延びる保持部6151Rbと、保持部材6151RのZB方向における下流端部に設けられる先端部6151Rmと、を有する。
被ガイド部6151Rd及び保持部6151RbのXB方向における下流端には、被支持部6151Raが設けられている。被支持部6151Raは、現像ユニット6109が離間位置に位置する状態で、現像カバー部材6128の保持部材支持面6128cと当接する。保持部6151Rbは、−XB方向における下流端に配置される当接部6151Rcを有している。当接部6151Rcは、現像ユニット6109が離間位置に位置する状態で、駆動側カートリッジカバー部材6116の被当接面6116q(図313(a)参照)と当接する。すなわち、保持部6151Rbは、被支持部6151Raと当接部6151Rcとを繋ぐ部分であり、ドラムユニット108と現像ユニット6109の間に挟まって現像ユニット6109が離間位置(退避位置)を維持できるだけの剛性を有している。
また、保持部6151Rbは、ドラムユニット108と現像ユニット6109の相対的な位置を規制し、現像ユニット6109を離間位置に保持するための第1位置としての離間保持位置と、現像ユニット6109を現像位置に保持するための第2位置としての離間解除位置と、に移動可能である。
突出部としての先端部6151Rmは、少なくとも現像ローラ106の回転軸線から離れる方向にドラムユニット108の第1枠体及び現像ユニット6109の第2枠体から突出可能である。先端部6151Rmには、当接力受け面6151Rgと、離間力受け面(離間力受け部)6151Rhと、が設けられている。当接力受け面6151Rg及び離間力受け面6151Rhは、先端部6151RmのZB方向における下流端部に設けられ、それぞれZB方向及びXB方向に対して傾斜した斜面である。より詳しくは、当接力受け面6151Rgは、ZB方向に向かうにつれて−XB方向に向かう斜面であり、離間力受け面6151Rhは、XB方向に向かうにつれてZB方向に向かう斜面である。言い換えれば、当接力受け面6151Rgは、感光ドラム104の回転軸線M1に沿って見たとき、ZB方向に直交する方向であるXB方向に関して回転軸線M1に近づくにつれて、ZB方向に関して回転軸線M1から離れるように傾斜している。
また、保持部材6151Rは、被係止部6151Reと、被突き当て面6151Rfと、ばね座6151Rjと、ボス6151Rkと、を有している。被係止部6151Reは、移動部材6162Rの係止部6162Rcに係止されることで、Y2方向への移動が規制され、かつ上昇規制面6162Reに突き当たることで、−ZB方向への移動が規制される。被突き当て面6151Rfは、移動部材6162Rの突き当て面6162Rdに突き当たることで、ZB方向への移動が規制される。
ばね座6151Rjは、−ZB方向下流側に臨んだ面であり、圧縮ばね6153Rの他端部を支持する。ばね座6151Rjからは、ボス6151Rkが−ZB方向に突出しており、ボス6151Rkには、圧縮ばね6153Rの他端部が挿入される。
図302(a)に示すように、駆動側軸受6126は、支持面6126a,6126bと、突き当て面6126c,6126dと、ばね座6126eと、段ギア支持軸6126fと、第1規制面6126gと、第2規制面6126h,6126iと、を有している。支持面6126a,6126bは、被押圧部材6152RをZB方向へ移動可能に支持する。突き当て面6126c,6126dは、被押圧部材6152Rが突き当たることで、被押圧部材6152Rの−ZB方向への移動を規制する。ばね座6126eは、圧縮ばね6163Rの一端部を支持する。
段ギア支持軸6126fは、第1規制面6126gからY2方向に延び、段ギア6161Rを、回転軸線M8を中心に回転可能に支持する。第1規制面6126gは、被押圧部材6152R及び段ギア6161RのY1方向への移動を規制する。第2規制面6126h,6126iは、移動部材6162RのY1方向への移動を規制する。
図302(b)に示すように、被押圧部材6152Rは、被支持面6152Ra,6152Rbと、被突き当て面6152Rc,6152Rdと、ばね座6152Reと、ラックギア6152Rfと、被押込み面6152Rgと、を有している。被支持面6152Ra,6152Rbは、駆動側軸受6126の支持面6126a,6126bによって、ZB方向へ移動可能に支持される。被突き当て面6152Rc,6152Rdは、駆動側軸受6126の突き当て面6126c,6126dに突き当たることで、−ZB方向への移動が規制される。ばね座6152Reは、駆動側軸受6126のばね座6126eとの間で圧縮ばね6163Rを支持する。
ラックギア6152Rfは、図302(b)では平面として図示されているが、ZB方向に並んだ複数の歯を有し、段ギア6161Rの小径ギア部6161Rc(図303(a)参照)と噛合う。被押込み面6152Rgは、カートリッジ押圧機構191(図316(a)参照)からの押し込み力を受ける面である。
図303(a)(b)に示すように、段ギア6161Rは、回転軸線M8を中心とした支持穴6161Raと、大径ギア部6161Rbと、小径ギア部6161Rcと、を有している。支持穴6161Raには、駆動側軸受6126の段ギア支持軸6126fが挿入される。大径ギア部6161Rbは、Y2方向において小径ギア部Rcの下流に配置され、小径ギア部6161Rcと一体に形成されている。大径ギア部6161Rb及び小径ギア部6161Rcの外周面には、回転軸線M8を中心に周方向に並んだ複数の歯が形成されている。なお、本実施例では、大径ギア部6161Rbと小径ギア部6161Rcのギア比は、2:1である。
大径ギア部6161Rbは、移動部材6162Rのラックギア6162Rfと噛み合い、小径ギア部6161Rcは、被押圧部材6152Rのラックギア6152Rfと噛み合う。大径ギア部6161RbのY1方向の側面には、第1規制リブ6161Rdが形成されており、大径ギア部6161RbのY2方向の側面には、第2規制リブ6161Reが形成されている。第1規制リブ6161Rdは、被押圧部材6152Rに当接することで、被押圧部材6152RのY2方向への移動を規制する。第2規制リブ6161Reは、現像カバー部材6128に当接することで、段ギア6161RのY2方向への移動を規制する。
[離間当接機構6150Rの組立]
[離間当接機構6150Rの組立]
次に、離間当接機構6150Rの組立について、図304(a)~図310(b)を用いて説明する。図304(a)は、移動部材6162R、圧縮ばね6153R及び保持部材6151Rの組立方法を説明するための図であり、図304(b)は、移動部材6162R、圧縮ばね6153R及び保持部材6151Rが組み付いた状態を示す斜視図である。図305(a)は、組付けられた移動部材6162R、圧縮ばね6153R及び保持部材6151Rを現像カバー部材6128に組み付ける様子を示す斜視図であり、図305(b)は、組付けられた移動部材6162R、圧縮ばね6153R及び保持部材6151Rを現像カバー部材6128に組み付ける様子を示す側面図である。図306(a)(b)は、現像カバー部材6128に移動部材6162R、圧縮ばね6153R及び保持部材6151Rが組付けられた状態を示す斜視図である。
図307(a)(b)は、駆動側軸受6126に被押圧部材6152R、段ギア6161R及び圧縮ばね6163Rを組み付ける様子を示す斜視図である。図308は、駆動側軸受6126に被押圧部材6152R、段ギア6161R及び圧縮ばね6163Rが組み付けられた状態を示す斜視図である。図309は、駆動側軸受6126と現像カバー部材6128とを組み付ける様子を示す図である。図310(a)は、離間当接機構6150Rを示す正面図であり、図310(b)は、図310(a)の310B−310B断面を示す断面図である。
図304(a)(b)に示すように、移動部材6162Rと保持部材6151Rとは、以下のように組付けられる。すなわち、保持部材6151Rは、移動部材6162Rに対してXB方向に挿入された後、移動部材6162Rの係止部6162Rcが、保持部材6151Rの被係止部6151Reに対して当接し、かつ移動部材6162Rの突き当て面6162Rdが保持部材6151Rの被突き当て面6151Rfに対して当接するように組付けられる。このとき、係止部6162Rcは、被係止部6151Reに対してY2方向における下流に位置し、突き当て面6162Rdは、被突き当て面6151Rfに対してZB方向における下流に位置している。
圧縮ばね6153Rは、移動部材6162Rのボス6162Rh及び保持部材6151Rのボス6151Rkに挿通された状態で、ばね座6162Rg,6151Rjの間に縮設される。この時、保持部材6151Rは、圧縮ばね6153Rの付勢力によって、移動部材6162Rに対してZB方向に付勢される。これにより、保持部材6151Rは、被突き当て面6151Rfを移動部材6162Rの突き当て面6162Rdに圧接した状態で、移動部材6162Rに対してZB方向への移動が規制される。保持部材6151Rが、外力によって圧縮ばね6153Rの付勢力に抗して−ZB方向に移動した場合には、被係止部6151Reが移動部材6162Rの上昇規制面6162Reに突き当たることで、保持部材6151Rの−ZB方向への移動が規制される。なお、保持部材付勢部としての圧縮ばね6153Rは、ZB方向に関して当接力受け面6151Rgが現像ローラ106の回転軸線M2から離れる方向に向かうように、保持部材6151Rを移動部材6162Rに対して付勢していると言える。
図305(a)(b)及び図306(a)(b)に示すように、予め組付けられた移動部材6162R、圧縮ばね6153R及び保持部材6151Rは、現像カバー部材6128に対して−ZB方向に挿入される。移動部材6162R、圧縮ばね6153R及び保持部材6151Rは、保持部材6151Rが現像カバー部材6128の突き当て面6128eに突き当たるまで挿入される。
この時、移動部材6162Rの被支持面6162Ra,6162Rbは、現像カバー部材6128の移動部材支持面6128a,6128bによって支持され、保持部材6151Rの被ガイド部6151Rdは、現像カバー部材6128の保持部材支持面6128c,6128dによって支持される。これにより、移動部材6162R及び保持部材6151Rは、ZB方向に関して移動可能となる。また、図305(b)及び図306(a)(b)に示すように、現像カバー部材6128に対して、移動部材6162RはY1方向下流側に配置され、保持部材6151Rの保持部6151RbはY2方向下流側に配置される。
図307(a)(b)及び図308に示すように、被押圧部材6152Rは、駆動側軸受6126に対して、Y1方向に組付けられる。この時、被押圧部材6152Rの被支持面6152Ra,6152Rbは、駆動側軸受6126の支持面6126a,6126bによって、ZB方向に移動可能に支持される。被押圧部材6152Rのばね座6152Reと、駆動側軸受6126のばね座6126eとの間には、圧縮ばね6163Rが縮設される。被押圧部材6152Rは、圧縮ばね6163Rの付勢力によって、駆動側軸受6126に対して、−ZB方向に付勢される。これにより、被押圧部材6152Rは、被突き当て面6152Rc,6152Rdが駆動側軸受6126の突き当て面6126c,6126dに突き当たって状態で、位置決めされる。
段ギア6161Rは、支持穴6161Raに駆動側軸受6126の段ギア支持軸6126fが挿入され、回転軸線M8を中心に回転可能である。段ギア6161Rの小径ギア部6161Rcは、被押圧部材6152Rのラックギア6152Rfと噛み合う。
図309に示すように、現像カバー部材6128は、Y1方向に突出する支持軸6128m,6128nを有している。また、駆動側軸受6126は、貫通孔6126m,6126nを有している。駆動側軸受6126のY1方向における下流には、現像容器125が配置されており、現像容器125は、貫通孔6126m,6126nに対応する位置に配置される支持穴125m,125nを有している。
移動部材6162R、圧縮ばね6153R及び保持部材6151Rが組付けられた現像カバー部材6128は、被押圧部材6152R、段ギア6161R及び圧縮ばね6163Rを組み付けられた駆動側軸受6126に向けてY1方向に組付けられる。この時、被押圧部材6152Rの被突き当て面6152Rc,6152Rdは、駆動側軸受6126の突き当て面6126c,6126dに当接した状態である。また、保持部材6151Rは、現像カバー部材6128の突き当て面6128eに当接した状態である。このため、段ギア6161Rの大径ギア部6161Rbは、移動部材6162Rのラックギア6162Rfに対して、所定の位相で噛み合っている。
現像カバー部材6128の支持軸6128m,6128nは、駆動側軸受6126の貫通孔6126m,6126nを貫通した状態で、現像容器125の支持穴125m,125nに挿入される。そして、現像カバー部材6128は、図310に示すように、固定ビス6145及び図示しない接着剤によって、駆動側軸受6126を介して現像容器125に対して固定される。なお、現像カバー部材6128の固定方法は、これに限るものでは無く、加熱による溶着や樹脂を流し込み固める等の接合方式でもよい。
なお、図310(b)に示すように、離間当接機構6150Rが組み立てられた状態では、段ギア6161R、被押圧部材6152R、移動部材6162R、保持部材6151Rは、以下のようにY1方向及びY2方向において位置決め、すなわち移動規制される。なお、図310(b)では、現像駆動入力ギア132及び現像ローラギア131(図15参照)は不図示となっている。
段ギア6161Rは、端面6161Rfが駆動側軸受6126の第1規制面6126gによってY1方向に移動規制され、第2規制リブ6161Reが現像カバー部材6128の規制面6128fによってY2方向に移動規制される。被押圧部材6152Rは、駆動側軸受6126の第1規制面6126gによってY1方向に移動規制され、段ギア6161Rの第1規制リブ6161RdによってY2方向に移動規制される。
移動部材6162Rは、駆動側軸受6126の第2規制面6126h,6126iによってY1方向に移動規制され、現像カバー部材6128の規制面6128fによってY2方向に移動規制される。保持部材6151Rは、保持部6151Rbが現像カバー部材628によってY1方向に移動規制され、被係止部6151Reが移動部材6162Rの係止部6162RcによってY2方向に移動規制される。
移動部材6162R及び保持部材6151RのZB方向の動作]
移動部材6162R及び保持部材6151RのZB方向の動作]
次に、図311(a)(b)を用いて、移動部材6162R及び保持部材6151RのZB方向(及び−ZB方向)の動作について説明する。図311(a)は、被押圧部材6152Rがカートリッジ押圧機構191(図316(a)参照)によって押し込まれる前の状態を示す断面図である。図311(b)は、被押圧部材6152Rがカートリッジ押圧機構191(図316(a)参照)によって押し込まれている状態を示す断面図である。
図311(a)に示すように、被押圧部材6152Rがカートリッジ押圧機構191によって押し込まれる前の状態では、移動部材6162Rは、待機位置に位置し、保持部材6151Rは、待機位置に位置している。なお、この時、現像ユニット6109は、当接位置に位置している。
保持部材6151Rが待機位置に位置している状態では、移動部材6162Rの突き当て面6162Rdは、保持部材6151Rの被突き当て面6151Rfに当接している。すなわち、突き当て面6162Rdと被突き当て面6151Rfとの間の距離は、距離Q0=0である。
カートリッジ押圧機構191が被押圧部材6152Rの被押込み面6152Rgを押圧すると、被押込み面6152Rgには、ZB方向の力F10が作用する。すると、被押圧部材6152Rは、圧縮ばね6163Rの付勢力F11に抗して、ZB方向に移動する。被押圧部材6152Rのラックギア6152Rfと段ギア6161Rの小径ギア部6161Rcは噛合っているので、ラックギア6152RfがZB方向に移動すると、段ギア6161RはV10方向に回転する。
また、段ギア6161Rの大径ギア部6161Rbが移動部材6162Rのラックギア6162Rfと噛み合っているので、段ギア6161RがV10方向に回転することで、移動部材6162RはZB方向に移動する。これにより、移動部材6162Rは、図311(b)に示すように、待機位置から突出位置に移動する。
本実施例では、段ギア6161Rの大径ギア部6161Rbと小径ギア部6161Rcのギア比が2:1であるため、移動部材6162Rの移動量(図299(b)の移動量D61参照)は、被押圧部材6152Rの移動量(図299(b)の移動量D60参照)の2倍となる。なお、段ギア6161Rの大径ギア部6161Rbと小径ギア部6161Rcのギア比は、これに限らず、任意に設定してもよい。また、段ギア6161Rを省略して、被押圧部材6152Rと移動部材6162Rとが、同量だけ移動するように構成してもよい。
保持部材6151Rの被突き当て面6151Rfが圧縮ばね6153Rによって付勢力F20でZB方向に付勢されているため、移動部材6162Rが待機位置から突出位置にZB方向に移動すると、保持部材6151RもZB方向に移動する。この時、保持部材6151Rは、図311(b)に示すように、待機位置から上方位置に移動する。保持部材6151Rが上方位置に位置している状態では、保持部材6151Rの被突き当て面6151Rfは、移動部材6162Rの突き当て面6162Rdから離間している。すなわち、突き当て面6162Rdと被突き当て面6151Rfとの間の距離は、距離Q0より大きい距離Q1となる。被突き当て面6151Rfと突き当て面6162Rdとが離間するメカニズムについては、後述する。
カートリッジ押圧機構191による被押圧部材6152Rの被押込み面6152Rgへの押し込みが無くなって、被押込み面6152Rgに作用していた力F10が無くなると、図311(b)に示すように、被押圧部材6152Rは、圧縮ばね6163Rの付勢力F13によって、−ZB方向に移動する。
被押圧部材6152Rのラックギア6152Rfと段ギア6161Rの小径ギア部6161Rcは噛合っているので、ラックギア6152Rfが−ZB方向に移動すると、段ギア6161RはV10方向とは反対のV11方向に回転する。
また、段ギア6161Rの大径ギア部6161Rbが移動部材6162Rのラックギア6162Rfと噛み合っているので、段ギア6161RがV11方向に回転することで、移動部材6162Rは−ZB方向に移動する。これにより、移動部材6162Rは、図311(a)に示すように、突出位置から待機位置に移動する。また、移動部材6162Rの−ZB方向への移動に伴って、保持部材6151Rも、−ZB方向に移動する。この時、保持部材6151Rは、上方位置から待機位置に移動する。
[駆動側カートリッジカバー部材]
[駆動側カートリッジカバー部材]
図312は、ドラムユニット108と現像ユニット6109との組立を示す斜視図である。図313(a)は、駆動側カートリッジカバー部材6116を示す斜視図であり、図313(b)は、離間当接機構6150Rを示す図である。
図312に示すように、ドラムユニット108及び現像ユニット6109は、実施例1と同様に、駆動側カートリッジカバー部材6116及び非駆動側カートリッジカバー部材6117によって結合される。現像カバー部材6128の円筒部6128bの外径部は、駆動側カートリッジカバー部材6116の現像ユニット支持穴6116aに嵌合する。これにより、現像ユニット6109は、揺動軸Kを中心にドラムユニット108に対して揺動可能に支持される。駆動側カートリッジカバー部材6116は、固定ビス6145により、ドラムユニット108の枠体(第1枠体)に固定される。非駆動側カートリッジカバー部材6117も、同様に、ドラムユニット108の枠体(第1枠体)に固定される。
なお、駆動側カートリッジカバー部材6116及び非駆動側カートリッジカバー部材6117をドラムユニット108と一体の構造としても良い。その場合には、駆動側カートリッジカバー部材6116及び非駆動側カートリッジカバー部材6117の一部を変形させることで、現像ユニット6109を組み付ける構成とすることが可能である。
図313(a)に示すように、駆動側カートリッジカバー部材6116は、係止面6116pと、被当接面6116qと、を有している。係止面6116pは、保持部材6151Rの当接部6151RcをZB方向に係止する。被当接面6116qは、ZB方向に平行に形成され、XB方向に臨んでいる。また、被当接面6116qは、保持部材6151Rの当接部6151Rcに当接可能である。なお、被当接面6116qは、必ずしもZB方向に平行に形成されなくてもよい。例えば−ZB方向に向かうにつれてZB方向へ向かう斜面であってもよい。これは、保持部材6151Rの当接部6151Rcが被当接面6116qに摺擦する際に、当接部6151Rcと被当接面6116qとの間の摩擦を抑え、当接部6151Rc及び被当接面6116qの摩耗や変形を低減させるためである。また、被当接面6116qは、当接部6151Rcと被当接面6116qとの間にある程度の摩擦力を発生させられる構成であれば、−ZB方向に向かうにつれて−XB方向へ向かう斜面とすることも可能である。
図313(b)は、駆動側カートリッジカバー部材6116の一部を部分断面線CS11にて部分的に省略した図である。なお、図317~図323、図324(a)及び図325(b)においても、駆動側カートリッジカバー部材6116の一部を部分断面線CS11にて部分的に省略している。
図313(b)に示すように、感光ドラム104と現像ローラ106の間の距離は、離間量Pで表される。現像ユニット6109が当接位置に位置する際には、離間量Pは、0であり、現像ユニット6109が離間位置に位置する際には、離間量Pは、0よりも大きい値(距離)P1となる。また、移動部材6162Rの突き当て面6162Rdと保持部材6151Rの被突き当て面6151Rfとの間の距離は、離間量Qで表される。図311(a)で説明したように、保持部材6151Rが待機位置に位置している際には、離間量Qは、Q0=0である。図311(b)に示すように、保持部材6151Rが上方位置に位置している際には、離間量Qは、0よりも大きい値(距離)Q1となる。なお、図321に示すように、保持部材6151Rが上方位置に位置している際には、離間量Qは、Q0=0である。
保持部材6151Rの保持部6151Rbは、非プリント時にはドラムユニット108と現像ユニット6109の間に挟まって、現像ユニット6109を離間位置に維持する。言い換えれば、保持部6151Rbは、ドラムユニット108の第1枠体の一部である駆動側カートリッジカバー部材6116と、現像ユニット6109の第2枠体の一部である現像カバー部材6128と、に接触することで、現像ユニット6109が離間位置から当接位置(現像位置)へ移動することを規制する。この時、保持部6151Rbは、現像ユニット6109を離間位置に保持するための第1位置としての離間保持位置に位置している。
[画像形成装置本体170側の構成]
[画像形成装置本体170側の構成]
次に、図314~図316(b)を用いて、離間当接機構6150Rの動作に関連する、画像形成装置本体(装置本体)170側の構成について説明する。図314は、カートリッジ押圧機構191、カートリッジトレイ171及び離間制御ユニット195Rを示す側面図である。図315(a)は、離間制御ユニット195Rを示す拡大図であり、図315(b)は、離間制御ユニット195Rを示す斜視図である。図316(a)(b)は、カートリッジ押圧機構191を示す斜視図である。
図314に示すように、プロセスカートリッジ6100は、カートリッジトレイ171に載置された状態で、画像形成装置本体170に装着される。画像形成装置本体170に装着されたプロセスカートリッジ6100の上方には、カートリッジ押圧機構191が配置されており、カートリッジ押圧機構191は、離間当接機構6150Rの被押圧部材6152Rを押圧可能である。
また、プロセスカートリッジ6100の下方には、離間制御ユニット195Rが配置されており、離間制御ユニット195Rは、画像形成装置本体170に固定されるホルダー199と、ホルダー199に対してW41方向及びW42方向に移動可能に支持される制御板金197と、ホルダー199に支持されると共に、制御板金197によってW41方向及びW42方向に移動可能な離間制御部材6196Rと、コイルばねから構成される付勢ばね198と、を有している。
図315(a)に示すように、離間制御部材6196Rは、先に説明したように、各色のプロセスカートリッジに対応して、4つ設けられている。離間制御部材6196Rは、回動中心6196Reを中心として回転可能に設けられ、付勢ばね198によってV12方向に付勢されている。
離間制御部材6196Rは、空間6196Rdを形成するように一部が窪んで形成されており、第二力付与面(退避力付与部、離間力付与部)6196Rbと、第二力付与面6196Rbに対向する対向面6196Rkと、対向面6196Rkに連続して形成される第一力付与面(力付与部、当接力付与部)6196Raと、を有する。第二力付与面6196Rbと対向面6196Rkは、連結部6196Rcを介して連結されている。第一力付与面6196Raは、対向面6196Rkを挟んで、連結部6196Rcとは反対側の面である。
図315(b)に示すように、ホルダー199には、穴部199aが形成されており、穴部199aは、上側規制面199bと、上側規制面199bの下方に位置する下側規制面199cと、を有している。上側規制面199bは、W41方向と平行に延びている。下側規制面199cは、第1下側規制面199c1、第2下側規制面199c2及び斜面199c3を有する。
第1下側規制面199c1及び第2下側規制面199c2は、W41方向と平行に延びており、第1下側規制面199c1は、第2下側規制面199c2よりもW41方向における下流に配置されている。斜面199c3は、第1下側規制面199c1と第2下側規制面199c2とを接続し、W42方向に向かうにつれて、上方に延びている。すなわち、第2下側規制面199c2は、第1下側規制面199c1よりも上方に配置されており、第2下側規制面199c2と上側規制面199bとの間の幅G12は、第1下側規制面199c1と上側規制面199bとの間の幅G11よりも狭い。
離間制御部材6196Rは、Y2方向に突出すると共に穴部199aに挿入される支持ボス6196Rs及び突起6196Rtを有している。支持ボス6196Rsは、上側規制面199b及び第2下側規制面199c2によって、W41方向及びW42方向に移動可能に支持される。なお、離間制御部材6196Rは、ホルダー199ではなく、制御板金197によって上下方向の移動が規制されるように支持されてもよい。
突起6196Rtは、上側規制面199b及び下側規制面199cに対して、W41方向にオーバラップしている。離間制御部材6196Rは、突起6196Rtが上側規制面199bに突き当たることで、V12方向の回転が規制され、突起6196Rtが下側規制面199cに突き当たることで、V12方向とは反対のV13方向の回転が規制される。
図316(a)(b)に示すように、画像形成装置本体170の前ドア11(図2参照)が開状態から閉状態に移行するのと連動して、カートリッジ押圧機構191が矢印ZA方向へ降下し、第一力付与部191aが被押圧部材6152Rの被押込み面6152Rgを押圧する。これにより、図311(a)(b)で説明したように、移動部材6162Rが待機位置から突出位置に移動し、保持部材6151Rが待機位置から上方位置に移動する。
[前ドア11の開閉による保持部材6151Rの動作]
[前ドア11の開閉による保持部材6151Rの動作]
次に、図317及び図318を用いて、前ドア11の開閉による保持部材6151Rの動作について説明する。図317は、前ドア11が開かれた状態における保持部材6151R及び離間制御部材6196Rを示す図である。図318は、前ドア11が閉じられた状態における保持部材6151R及び離間制御部材6196Rを示す図である。ただし、図318では、ドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等の一部の部品を不図示としている。
図317に示すように、プロセスカートリッジ6100が画像形成装置本体170に装着され、前ドア11が開かれた状態では、カートリッジ押圧機構191は、被押圧部材6152Rを押圧していない。この時、移動部材6162Rは待機位置に位置し、保持部材6151Rは待機位置に位置している。よって、移動部材6162Rの突き当て面6162Rdと保持部材6151Rの被突き当て面6151Rfとの間の離間量Qは、0である。
また、現像ユニット6109は、付勢部としての現像加圧ばね134(図34参照)の付勢力によるモーメントM10によってV2方向に付勢されており、当接位置に位置している。すなわち、感光ドラム104と現像ローラ106の間の離間量Pは、0である。また、離間制御部材6196Rは、付勢ばね198の付勢力によるモーメントM20によって、V12方向に付勢されている。そして、離間制御部材6196Rの突起6196Rtが上側規制面199bに突き当たることで、回転規制されている。なお、移動部材6162Rが待機位置に位置している時には、保持部材6151Rの当接部6151Rcは、駆動側カートリッジカバー部材6116の係止面6116pに対して離間している。
前ドア11が閉じられると、図318に示すように、被押圧部材6152Rの被押込み面6152Rg(図316(a)参照)は、下降してきたカートリッジ押圧機構191によって押圧され、ZB方向に移動する。これにより、移動部材6162R及び保持部材6151Rも、ZB方向に移動する。
保持部材6151RがZB方向に移動することで、保持部材6151Rの当接力受け面6151Rgが離間制御部材6196Rの第一力付与面6196Raに当接する。そして、当接力受け面6151Rgは、圧縮ばね6153Rの付勢力F20で第一力付与面6196Raを押し込む。これにより離間制御部材6196Rは、付勢ばね198の付勢力によるモーメントM20に抗して、V13方向に回転する。本実施例では、圧縮ばね6153Rの付勢力(F20)は、付勢ばね198の付勢力よりも大きくなるように設定されている。
保持部材6151Rが移動部材6162Rと共にZB方向に移動している途中で、当接部6151Rcは、駆動側カートリッジカバー部材6116の係止面6116pに突き当たる。これにより、移動部材6162RがZB方向に移動している途中で、保持部材6151RのZB方向への移動が規制され、移動部材6162Rの突き当て面6162Rdが、保持部材6151Rの被突き当て面6151Rfに対して離間する。このため、突き当て面6162Rdと被突き当て面6151Rfとの間の離間量Qは、0よりも大きくなる。よって、保持部材6151Rは、上方位置に位置する。
保持部材6151Rの当接部6151Rcが係止面6116pに突き当たった状態で、離間制御部材6196Rは、図318に示すホーム位置に位置する。離間制御部材6196Rがホーム位置に位置する状態では、離間制御部材6196Rの突起6196Rtは、上側規制面199b及び下側規制面199cに対して離間している。なお、図318に示す状態においても、現像ユニット6109は、当接位置に保持されている。すなわち、第2規制面としての係止面6116pは、保持部6151Rbが離間解除位置(第2位置)に位置する際に、保持部6151RbがZB方向に関して離間解除位置(第2位置)から離間保持位置(第1位置)へ移動することを規制する。
[現像ユニット6109の離間動作]
[現像ユニット6109の離間動作]
次に、図319~図321を用いて、現像ユニット6109が当接位置(現像位置)から離間位置(退避位置)に移動する離間動作について説明する。図319は、現像ユニット6109の離間動作を説明するための図であって、離間制御部材6196Rがホーム位置に位置する状態を示す図である。図320は、現像ユニット6109の離間動作を説明するための図であって、離間制御部材6196Rがホーム位置からW41方向に移動した状態を示す図である。図321は、現像ユニット6109の離間動作を説明するための図であって、離間制御部材6196RがW42方向に移動して再びホーム位置に復帰した状態を示す図である。ただし、図319、図320、図321では、ドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等の一部の部品を不図示としている。
図319は、図318と同じ状態で、移動部材6162Rは突出位置、保持部材6151Rは上方位置(第2稼働位置)、現像ユニット6109は当接位置、離間制御部材6196Rはホーム位置にそれぞれ位置している。図319に示すように、離間制御部材6196Rがホーム位置からW41方向に移動すると、保持部材6151Rの離間力受け面6151Rhは、離間制御部材6196Rの第二力付与面6196Rbから力F21を受ける。
保持部材6151Rが力F21を受けると、図320に示すように、現像ユニット6109は、現像加圧ばね134(図34参照)によるモーメントM10に抗して、V1方向に揺動する。この時、現像ユニット6109は、離間位置よりも当接位置から更にドラムユニット108に対して離れた第2離間位置に揺動する。これにより、保持部材6151Rの当接部6151Rcは、駆動側カートリッジカバー部材6116の係止面6116pとの係止が解除される。そして、保持部材6151Rは、圧縮ばね6153Rの付勢力によってZB方向に移動し、下方位置(第1稼働位置)に位置する。
その後、離間制御部材6196Rは、W42方向に移動し、図321に示すように、ホーム位置に戻る。現像ユニット6109は、現像加圧ばね134(図34参照)によるモーメントM10によって、V2方向に揺動する。これにより、保持部材6151Rの当接部6151Rcは、駆動側カートリッジカバー部材6116の被当接面6116qに当接する。更に、保持部材6151Rの被支持部6151Raは、現像カバー部材6128の保持部材支持面6128dに当接する。
すなわち、保持部材6151Rの当接部6151Rcから被支持部6151Raにかけて延びる保持部6151Rbは、駆動側カートリッジカバー部材6116の被当接面6116qと現像カバー部材6128の保持部材支持面6128dとの間に挟まれる。また、現像加圧ばね134(図34参照)の付勢力によって、保持部6151Rbは、被当接面6116qと保持部材支持面6128dとによって、所定の力で挟持される。このため、この状態は、駆動側カートリッジカバー部材6116が、保持部材6151Rの保持部6151Rbを介して、現像カバー部材6128を位置決めし、安定的に保持した状態と言える。つまり、ドラムユニット108が、保持部材6151Rを介して現像ユニット6109を離間位置に位置決めし、安定的に保持した状態と言える。この時、保持部6151Rbは、現像ユニット6109を離間位置に保持するための第1位置としての離間保持位置に位置している。
現像ユニット6109が第2離間位置から離間位置に向けて揺動する過程で、下方位置に位置する保持部材6151Rの当接力受け面6151Rgは、離間制御部材6196Rの第一力付与面6196Raを押圧する。この時、圧縮ばね6153Rの付勢力が付勢ばね198の付勢力よりも強く設定されているため、保持部材6151Rは下方位置のままである。
そして、離間制御部材6196Rは、付勢ばね198の付勢力に抗してV13方向に回転する。現像ユニット6109が保持部材6151Rの保持部6151Rbによって離間位置に保持されている状態では、離間制御部材6196Rの突起6196Rtは、第1下側規制面199c1に当接又は近接した状態となっている。
[現像ユニット6109の当接動作]
[現像ユニット6109の当接動作]
次に、図322~図324を用いて、現像ユニット6109が離間位置(退避位置)から当接位置(現像位置)に移動する当接動作について説明する。図322は、現像ユニット6109の当接動作を説明するための図であって、離間制御部材6196Rがホーム位置に位置する状態を示す図である。図323は、現像ユニット6109の当接動作を説明するための図であって、離間制御部材6196Rがホーム位置からW42方向に移動した状態を示す図である。図324は、現像ユニット6109の当接動作を説明するための図であって、離間制御部材6196RがW41方向に移動して再びホーム位置に復帰した状態を示す図である。ただし、図322、図323、図324では、ドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等一部の部品を不図示としている。
図322は、図321と同じ状態で、移動部材6162Rは突出位置、保持部材6151Rは下方位置(第1稼働位置)、現像ユニット6109は離間位置、離間制御部材6196Rはホーム位置にそれぞれ位置している。図322に示すように、離間制御部材6196Rがホーム位置からW42方向に移動すると、保持部材6151Rの当接力受け面6151Rgは、離間制御部材6196Rの第一力付与面6196Raから力F22又は力F23又は力F24を受ける。
すなわち、保持部材6151Rがホーム位置からW42方向に移動する過程で、突起6196Rtが第1下側規制面199c1に摺接している間は、保持部材6151Rの当接力受け面6151Rgは、離間制御部材6196Rの第一力付与面6196Raから力F22を受ける。また、突起6196Rtが斜面199c3を乗り越えて第2下側規制面199c2に摺接している間は、保持部材6151Rの当接力受け面6151Rgは、離間制御部材6196Rの第一力付与面6196Raから力F23を受ける。また、突起6196Rtが斜面199c3を乗り越える間は、保持部材6151Rの当接力受け面6151Rgは、離間制御部材6196Rの第一力付与面6196Raから力F24を受ける。
離間制御部材6196Rは、突起6196Rtが斜面199c3に乗り上げることで、V12方向に回転する。離間制御部材6196RがV12方向に回転することで、第一力付与面6196Raが当接力受け面6151Rgを大きく押し上げるので、力F24による保持部材6151Rを−ZB方向へ押し上げる力および量は、力F22,F23よりも大きい。また、突起6196Rtが第1下側規制面199c1又は第2下側規制面199c2又は斜面199c3に当接している状態では、離間制御部材6196RのV13方向の回転が規制されるので、たとえ付勢ばね198の付勢力が圧縮ばね6153Rの付勢力よりも小さくても、第一力付与面6196Raによって当接力受け面6151Rgを押し上げることができる。よって、保持部材6151Rは、圧縮ばね6153Rの付勢力F20に抗して、−ZB方向に移動する。このように、保持部材6151Rを、力F22,F23,力F24によって−ZB方向に持ち上げることで、保持部材6151Rを確実に上方位置(図323参照)に移動させることができる。
図323に示すように、保持部材6151Rは、−ZB方向に移動することで、上昇位値(第2稼働位置)に位置する。これにより、保持部材6151Rの当接部6151Rcは、駆動側カートリッジカバー部材6116の被当接面6116qとの係合が解除される。そして、現像ユニット6109は、現像加圧ばね134(図34参照)によるモーメントM10によって、V2方向に揺動し、当接位置となる。この時、保持部材6151Rの当接部6151Rcは、係止面6116pに係止される。保持部材6151Rは、圧縮ばね6153Rの付勢力によって係止面6116pに対して所定の圧力で係止され、上方位置を維持する。
その後、離間制御部材6196Rは、W41方向に移動し、図324に示すように、ホーム位置に戻る。離間制御部材6196Rは、付勢ばねによるモーメントM20によって、V12方向に付勢されている。このため、離間制御部材6196RがW41方向に移動する過程で、離間制御部材6196Rの第一力付与面6196Raは、保持部材6151Rの当接力受け面6151Rgに沿って移動する。離間制御部材6196Rがホーム位置に戻った状態で、移動部材6162Rは突出位置、保持部材6151Rは上方位置、現像ユニット6109は当接位置にそれぞれ位置している。なお、保持部6151Rbは、現像ユニット6109を当接位置(現像位置)に保持するための第2位置としての離間解除位置に位置している。言い換えれば、保持部6151Rbは、離間解除位置にある時、現像ユニット6109が離間位置から当接位置(現像位置)へ移動することを許容する。この状態で、プリント動作が行われる。
このように、移動部材6162Rが待機位置に位置する際には、保持部材6151Rは、図317に示す待機位置に位置する。また、移動部材6162Rが突出位置に位置する状態では、保持部材6151Rは下方位置(第1稼働位置)もしくは上方位置(第2稼働位置)をとることが可能である。そして、保持部材6151Rが下方位置(第1稼働位置)に位置する際に現像ユニット6109は離間位置に位置し、保持部材6151Rが上方位置(第2稼働位置)に位置する際に現像ユニット6109は当接位置に位置する。
言い換えれば、当接力受け部としての当接力受け面6151Rgを含む保持部材6151Rは、現像ユニット6109に対して所定方向としてのZB方向に移動することにより、待機位置と、下方位置(第1稼働位置)と、上方位置(第2稼働位置)と、を取ることが可能である。下方位置(第1稼働位置)及び上方位置(第2稼働位置)は、互いに異なる位置であり、待機位置よりも現像ユニット6109から突出した位置である。また、保持部材6151Rが待機位置、下方位置(第1稼働位置)、上方位置(第2稼働位置)のそれぞれに位置しているとき、保持部材6151Rの当接力受け面6151Rgも、待機位置、下方位置(第1稼働位置)、上方位置(第2稼働位置)のそれぞれに位置していると言える。
そして、保持部材6151Rの保持部6151Rbは、現像ユニット6109が離間位置、保持部6151Rbが離間保持位置(第1位置)、且つ当接力受け面6151Rgが下方位置(第1稼働位置)にある状態から、当接力受け面6151Rgが離間制御部材6196Rから当接力を受けて上方位置(第2稼働位置)へZB方向(所定方向)に移動することで、離間保持位置(第1位置)から離間解除位置(第2位置)へ移動する。なお、所定方向は、ZB方向及び−ZB方向を含む。
なお、上述した現像ユニット6109の離間動作は、例えばプロセスカートリッジ6100が画像形成装置本体170に装着され、前ドア11が閉められたことにより、初期動作として実行される。これにより現像ユニット6109の現像ローラ106を感光ドラム104から離間させることができ、現像ローラ106及び感光ドラム104を高寿命化できると共に、画像不良を抑制することができる。
そして、初期動作として現像ユニット6109の離間動作が行われた後、例えば画像形成装置Mにプリント開始の指令が出力されると、プリントを開始する前に、現像ユニット6109の当接動作が実行される。そして、現像ユニット6109が当接位置(図324に示す状態)に位置する状態において、プリントが開始される。
そして、プリント終了後に、現像ユニット6109の離間動作が行われる。そして、現像ユニット6109が離間位置(図321に示す状態)に位置する状態において、画像形成装置Mは待機状態となる。なお、画像形成装置Mが待機状態にある時に、画像形成装置Mにプリント開始の指令が出力されると、上述したように現像ユニット6109の当接動作が実行される。
[保持部材6151Rの−ZB方向の移動規制]
[保持部材6151Rの−ZB方向の移動規制]
次に、図325(a)~図326(b)を用いて、保持部材6151Rの−ZB方向の移動規制のための構成について説明する。図325(a)は、現像ユニット6109の離間動作時において、保持部材6151Rの離間力受け面6151Rhに作用する力を説明するための図であり、図325(b)は、図325(a)の状態における保持部材6151Rの位置を示す図。図326(a)は、現像ユニット6109の離間動作時において、保持部材6151Rが上昇規制面6162Reに突き当たった状態を示す図であり、図326(b)は、図326(a)の状態における保持部材6151Rの位置を示す図である。ただし、図325(a)、図326(a)では、ドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等一部の部品を不図示としている。
図325(a)に示すように、現像ユニット6109が離間動作を実行すると、離間制御部材6196RがW41方向に移動し、離間制御部材6196Rの第二力付与面6196Rbは、保持部材6151Rの離間力受け面6151Rhに力F21を加える。力F21は、−ZB方向成分の力F21Zbを含む。また、現像加圧ばね134(図34参照)の付勢力によるモーメントM10が大きいと、力F21は大きくなる。すると、力F21Zbが圧縮ばね6153Rの付勢力F20よりも大きくなる場合がある。
力F21Zbが付勢力F20よりも大きくなると、離間制御部材6196Rの第二力付与面6196Rbは、付勢力F20に抗して保持部材6151Rを−ZB方向に押し上げてしまう。離間制御部材6196RがW41方向に移動する際に、保持部材6151Rが上方位置から−ZB方向に大きく移動すると、第二力付与面6196Rbと離間力受け面6151Rhとの係合が外れてしまい、適切に現像ユニット6109の離間動作及び当接動作が行えなくなってしまう。
そこで、本実施例では、図325(b)に示すように、移動部材6162Rに第1規制面としての上昇規制面6162Reを形成し、保持部材6151Rの被係止部6151Reが上昇規制面6162Reに突き当たることで、保持部材6151Rの−ZB方向への移動を規制している。言い換えれば、上昇規制面6162Reは、離間力受け面6151Rhが離間制御部材6196Rから離間力を受けた際に、保持部6151RbがZB方向に関して離間解除位置(第2位置)から離間保持位置(第1位置)とは反対の方向に移動することを規制する。
このため、図326(a)(b)に示すように、たとえ離間制御部材6196Rの第二力付与面6196Rbが保持部材6151Rを−ZB方向に押し上げてしまった場合でも、保持部材6151Rの被係止部6151Reが上昇規制面6162Reに突き当たる。そして、被係止部6151Reが上昇規制面6162Reに突き当たった状態でも、第二力付与面6196Rbと離間力受け面6151Rhとの係合は維持されるように構成されている。これにより、離間制御部材6196RがW41方向に移動する際に、第二力付与面6196Rbと離間力受け面6151Rhとの係合を維持することができ、適切に現像ユニット6109の離間動作及び当接動作が行うことができる。
以上の説明は、駆動側に関してのものあるが、非駆動側にも離間当接機構6150Lが配置されている。その結果、非駆動側においても同様の動作を行うことができる。駆動側と非駆動側の両側で、離間及び当接動作を行うことにより、確実に安定して現像ユニット6109を揺動軸Kを中心に揺動させることができる。
以上説明した本実施例の構成によれば、実施例1、9と同様の効果を得ることができる。また、本実施例では、保持部材6151RがZB方向(及び−ZB方向)のみに移動することで、現像ユニット6109を当接位置と離間位置との間で切り換えることができるので、保持部材6151Rを配置するのに必要なスペースを省スペース化することができ、プロセスカートリッジ6100を小型化することができる。
また、本実施例では、保持部6151Rb及び先端部6151Rmが保持部材6151Rに一体に設けられていたが、これに限定されない。例えば、保持部6151Rbを先端部6151Rmとは別体に設け、離間制御部材6196Rによって移動される先端部6151Rmに連動して、保持部6151Rbが第1位置(離間保持位置)と第2位置(離間解除位置)との間で移動可能に構成されてもよい。また、本実施例では、保持部材6151Rは、現像ユニット6109の現像カバー部材6128に支持されていたが、これに限定されない。例えば、保持部材6151Rは、ドラムユニット108に移動可能に支持されてもよく、また移動部材6152Rに支持されていてもよい。
また、実施例32は、既述の各実施例1~31と、適宜組み合わせてもよい。
次いで、図327(a)~図338を用いて、実施例33について説明する。本実施例では、前述した実施例32と異なる構成、動作について説明し、同様の構成、機能を有する部材については同一の参照番号を付して説明は省略する。
より具体的には、本実施例33の離間当接機構7150R(図329(a)参照)は、実施例32と同様の、駆動側軸受6126、圧縮ばね6153R,6163R、被押圧部材6152R、段ギア6161R、移動部材6162R、及び現像カバー部材6128を有している。一方で、実施例33では、実施例32の保持部材6151R及び駆動側カートリッジカバー部材6116に代えて、保持部材7151R及び駆動側カートリッジカバー部材7116を有している。また、実施例32の現像ユニット6109は、現像加圧ばね134の付勢力によって当接位置に向けて付勢されていたが、実施例33の現像ユニット7109は、不図示の現像離間ばねの付勢力によって離間位置に向けて付勢されている。
[離間当接機構7150Rの構成]
[離間当接機構7150Rの構成]
次に、図327(a)(b)を用いて、本実施例の離間当接機構7150Rと実施例32の離間当接機構6150Rとの相違点である、保持部材7151R及び駆動側カートリッジカバー部材7116について説明する。図327(a)は、保持部材7151Rを示す斜視図であり、図327(b)は、駆動側カートリッジカバー部材7116を示す正面図である。
図327(a)に示すように、保持部材7151Rは、ZB方向に延びる被ガイド部7151Rdと、被ガイド部7151RdのZB方向における上流端部から−XB方向に延びる保持部7151Rbと、保持部材7151RのZB方向における下流端部に設けられる先端部7151Rmと、を有する。また、保持部材7151Rが有する、被ガイド部7151Rdと、被係止部7151Reと、被突き当て面7151Rfは、実施例32の保持部材6151Rが有する、被ガイド部6151Rdと、被係止部6151Reと、被突き当て面6151Rfと同様の構成及び機能を有しているため、説明を省略する。
保持部7151Rbの−XB方向における下流端には、被支持部7151Raが設けられている。一方で、保持部7151RbのXB方向における下流端には、当接部7151Rcと、斜面7151Rrと、が形成されている。当接部7151Rcは、斜面7151Rrに連続して形成され、斜面7151RrよりもXB方向における下流かつ−ZB方向における下流に配置されている。斜面7151Rrは、−ZB方向に向かうにつれてXB方向に向かう斜面である。
突出部としての先端部7151Rmは、少なくとも現像ローラ106の回転軸線から離れる方向にドラムユニット108の第1枠体及び現像ユニット7109の第2枠体から突出可能である。先端部7151Rmには、当接力受け面(当接力受け部)7151Rgと、離間力受け面7151Rhと、下面7151Rsと、が形成されている。当接力受け面7151Rg及び離間力受け面7151Rhは、先端部7151RmのZB方向における下流端部に設けられ、それぞれZB方向及びXB方向に対して傾斜した斜面である。より詳しくは、当接力受け面7151Rgは、ZB方向に向かうにつれてXB方向に向かう斜面である。言い換えれば、当接力受け面7151Rgは、感光ドラム104の回転軸線M1に沿って見たとき、ZB方向に直交する方向であるXB方向に関して回転軸線M1に近づくにつれて、ZB方向に関して回転軸線M1に近づくように傾斜している。
離間力受け面7151Rhは、−ZB方向に向かうにつれて−XB方向に向かう斜面である。言い換えれば、離間力受け面7151Rhは、感光ドラム104の回転軸線M1に沿って見たとき、ZB方向に直交する方向であるXB方向に関して回転軸線M1に近づくにつれて、ZB方向に関して回転軸線M1に近づくように傾斜している。下面7151Rsは、当接力受け面7151Rg及び離間力受け面7151RhよりもXB方向における下流に配置され、ZB方向に臨んでいる。
図327(b)に示すように、駆動側カートリッジカバー部材7116は、本体部7116mと、保持部7151Rbを押圧することにより現像ユニット7109に当接位置へ向けて揺動するための力を付与可能な現像付勢部7116sと、を備えている。現像付勢部7116sは、本体部7116mからZB方向に沿った方向に延び、弾性変形可能な弾性部7116nと、弾性部7116nの先端部に設けられる係止面7116p及び被当接面7116qと、を有している。弾性部7116nは、例えば板ばねで構成されるが、本体部7116mと別部材から構成されても、一体的に構成されてもよい。
被当接面7116qは、−ZB方向に向かうにつれてXB方向に向かう斜面であり、−XB方向に臨んでいる。第2規制面としての係止面7116pは、被当接面7116qに連続して形成され、被当接面7116qよりも−ZB方向における下流に配置されている。係止面7116pは、−XB方向に平行又は−XB方向に向かうにつれて−ZB方向に向かう面から形成される。
[移動部材6162R及び保持部材7151RのZB方向の動作]
[移動部材6162R及び保持部材7151RのZB方向の動作]
次に、図328及び図329(a)(b)を用いて、移動部材6162R及び保持部材7151RのZB方向(及び−ZB方向)の動作について説明する。図328は、被押圧部材6152Rがカートリッジ押圧機構191(図316(a)参照)によって押し込まれる前の状態を示す側面図である。図329(a)は、被押圧部材6152Rがカートリッジ押圧機構191(図316(a)参照)によって押し込まれている状態を示す断面図である。図329(b)は、係止面7116pの近傍を示す拡大図である。なお、図328、図329(a)ではドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等の一部の部品を不図示としている。
図328に示すように、被押圧部材6152Rがカートリッジ押圧機構191によって押し込まれる前の状態では、移動部材6162Rは、待機位置に位置し、保持部材7151Rは、待機位置に位置している。なお、この時、現像ユニット7109は、不図示の現像離間ばねによるモーメントM30により、V1方向に付勢されている。これにより、感光ドラム104と現像ローラ106との間の距離は、離間量P2となり、現像ユニット7109は離間位置に位置している。
保持部材7151Rが待機位置に位置している状態では、移動部材6162Rの突き当て面6162Rdは、保持部材7151Rの被突き当て面7151Rfに当接している。すなわち、突き当て面6162Rdと被突き当て面7151Rfとの間の距離は、距離Q0=0である。
図329(a)に示すように、カートリッジ押圧機構191(図316(a)参照)が被押圧部材6152Rの被押込み面6152Rgを押圧すると、実施例32で説明したように、段ギア6161R(図311(b)参照)によって被押圧部材6152Rの移動が増速されて移動部材6162Rに伝達され、移動部材6162RがZB方向に移動する。これにより、移動部材6162Rは、図329(a)に示す突出位置に移動する。
また、保持部材7151Rは、図329(a)(b)に示すように、移動部材6162Rと共にZB方向に移動するが、移動部材6162Rが突出位置へ向けてZB方向に移動している途中で、保持部材7151Rの保持部7151Rbが駆動側カートリッジカバー部材7116の係止面7116pに突き当たる。これにより、保持部材7151RのZB方向への移動が規制され、移動部材6162Rの突き当て面6162Rdが、保持部材7151Rの被突き当て面7151Rfに対して離間する。
このため、移動部材6162Rが突出位置に位置する状態で、突き当て面6162Rdと被突き当て面7151Rfとの間の離間量Q2は、0よりも大きくなり、保持部材7151Rは、上方位置に位置する。なお、この時、現像ユニット7109は、不図示の現像離間ばねによるモーメントM30により、離間位置を維持している。
[画像形成装置本体170側の構成]
[画像形成装置本体170側の構成]
次に、図330を用いて、離間当接機構6150Rの動作に関連する、画像形成装置本体(装置本体)170側の構成について説明する。本実施例では、画像形成装置本体170側の構成は、実施例1,32と同様である。
図330は、離間制御ユニット195Rを示す正面図である。本実施例に係る離間制御ユニット195Rの離間制御部材7196Rは、実施例32と構成は同一なものの、第一力付与面(力付与部、当接力付与部)及び第二力付与面(退避力付与部、離間力付与部)の位置が実施例32とは若干異なる。離間制御部材7196Rは、空間7196Rdを形成するように一部が窪んで形成されており、第一力付与面(力付与部、当接力付与部)7196Raと、第一力付与面7196Raに対向する対向面7196Rkと、対向面7196Rkに連続して形成される第二力付与面(退避力付与部、離間力付与部)7196Rbと、を有している。また、離間制御部材7196Rは、第一力付与面7196Raに隣接して形成される上面7196Rsを有している。なお、離間制御部材7196Rは、実施例32の離間制御部材6196Rの突起6196Rtと同様の機能を有する突起7196Rt(図331参照)を有している。
[前ドア11の開閉による保持部材7151Rの動作]
[前ドア11の開閉による保持部材7151Rの動作]
次に、図331及び図332を用いて、前ドア11の開閉による保持部材7151Rの動作について説明する。図331は、前ドア11が開かれた状態における保持部材7151R及び離間制御部材7196Rを示す図である。図332は、前ドア11が閉じられた状態における保持部材7151R及び離間制御部材7196Rを示す図である。なお、図331、図332ではドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等の一部の部品を不図示としている。
図331に示すように、カートリッジとしてのプロセスカートリッジ7100が画像形成装置本体170に装着され、前ドア11が開かれた状態では、カートリッジ押圧機構191は、被押圧部材6152Rを押圧していない。この時、移動部材6162Rは待機位置に位置し、保持部材7151Rは待機位置に位置している。
また、現像ユニット7109は、不図示の現像離間ばねの付勢力によるモーメントM30によってV1方向に付勢されており、離間位置に位置している。また、離間制御部材7196Rは、付勢ばね198の付勢力によるモーメントM20によって、V12方向に付勢されている。そして、離間制御部材7196Rの突起7196Rtが上側規制面199bに突き当たることで、回転規制されている。
前ドア11が閉じられると、図332に示すように、被押圧部材6152R(図329(a)参照)は、下降してきたカートリッジ押圧機構191によって押圧され、ZB方向に移動する。これにより、移動部材6162R及び保持部材7151Rも、ZB方向に移動する。
保持部材7151RがZB方向に移動することで、保持部材7151Rの下面7151Rsが離間制御部材7196Rの上面7196Rsに当接する。そして、下面7151Rsは、圧縮ばね6153Rの付勢力F31で上面7196Rsを押し込む。これにより離間制御部材7196Rは、付勢ばね198の付勢力によるモーメントM20に抗して、V13方向に回転する。本実施例では、圧縮ばね6153Rの付勢力(F31)は、付勢ばね198の付勢力よりも大きくなるように設定されている。また、この時、離間制御部材7196Rは、ホーム位置に位置する。離間制御部材7196Rがホーム位置に位置する状態では、離間制御部材7196Rの突起7196Rtは、上側規制面199b及び下側規制面199cに対して離間している。なお、図332に示す状態においても、現像ユニット77109は、離間位置に保持されている。
更に、図329(a)(b)で説明したように、移動部材6162Rが突出位置へ向けてZB方向に移動している途中で、保持部材7151Rの保持部7151Rbが駆動側カートリッジカバー部材7116の係止面7116pに突き当たる。このため、移動部材6162Rが突出位置に位置する状態で、保持部材7151Rは、上方位置に位置する。
[現像ユニット7109の当接動作]
[現像ユニット7109の当接動作]
次に、図333~図335を用いて、現像ユニット7109が離間位置(退避位置)から当接位置(現像位置)に移動する当接動作について説明する。図333は、現像ユニット7109の当接動作を説明するための図であって、離間制御部材7196Rがホーム位置に位置する状態を示す図である。図334(a)は、現像ユニット7109の当接動作を説明するための図であって、離間制御部材7196Rがホーム位置からW42方向に移動した状態を示す図である。図334(b)は、保持部材7151Rの当接部7151Rcの近傍を示す拡大図である。図335は、現像ユニット7109の当接動作を説明するための図であって、離間制御部材7196RがW41方向に移動して再びホーム位置に復帰した状態を示す図である。なお、図333、図334(a)、図335ではドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等の一部の部品を不図示としている。
図333は、図332と同じ状態で、移動部材6162Rは突出位置、保持部材7151Rは上昇位置(第1稼働位置)、現像ユニット7109は離間位置、離間制御部材7196Rはホーム位置にそれぞれ位置している。また、図333において、保持部材7151Rの保持部7151Rbが駆動側カートリッジカバー部材7116の係止面7116pに突き当たっている。
図333及び図334(a)に示すように、離間制御部材7196Rがホーム位置からW42方向に移動すると、保持部材7151Rの当接力受け面7151Rgは、離間制御部材7196Rの第一力付与面7196Raから力F40を受ける。これにより、現像ユニット7109は、不図示の現像離間ばねによるモーメントM30に抗して、駆動側カートリッジカバー部材7116(及びドラムユニット108)に対してV2方向に揺動する。そして、現像ユニット7109の現像ローラ106が感光ドラム104に当接し、現像ユニット7109は当接位置に位置する。
また、現像ユニット7109が当接位置に向けて揺動する際に、保持部材7151Rの保持部7151Rbは、係止面7116pに対して、感光ドラム104に近づく方向に移動する。これにより、保持部7151Rbと係止面7116pとの係止が解除され、図334(b)に示すように、保持部7151Rbに形成された斜面7151Rr及び当接部7151Rcが、駆動側カートリッジカバー部材7116の被当接面7116qに当接する。
この時、保持部材7151Rには、圧縮ばね6153RによってZB方向の力F31が作用している。なお、保持部材付勢部としての圧縮ばね6153Rは、ZB方向に関して離間力受け面7151Rhが現像ローラ106の回転軸線M2から離れる方向に向かうように、保持部材7151Rを移動部材6162Rに対して付勢していると言える。このため、保持部材7151Rは、斜面7151Rr及び当接部7151Rcが被当接面7116qを力F32で押圧しつつ、ZB方向に移動する。駆動側カートリッジカバー部材7116の弾性部7116nは、力F32によってV31方向に弾性変形する。
保持部材7151RのZB方向の移動は、移動部材6162Rの突き当て面6162Rdに突き当たることで停止し、これにより、保持部材7151Rは、下方位置に位置する。図334(a)(b)では、移動部材6162Rが突出位置、保持部材7151Rが下方位置、現像ユニット7109が当接位置に位置している。
そして、駆動側カートリッジカバー部材7116の被当接面7116qは、弾性部7116nがV31方向に弾性変形したことに起因して、力F33で保持部材7151Rの当接部7151Rcを押圧する。言い換えれば、現像付勢部7116sの被当接面7116qは、保持部材7151Rの当接部7151Rcを介して、現像ユニット7109を力F33で押圧する。すなわち、現像付勢部7116sは、保持部7151Rbが離間保持位置(第1位置)から離間解除位置(第2位置)に移動する際に弾性変形することで、現像ユニット7109が当接位置(現像位置)に向かうように保持部7151Rbを押圧する。そして、現像ユニット7109は、力F33により、現像離間ばねによるモーメントM30に抗して、V2方向に付勢され、当接位置を安定的に保持する。
その後、図335に示すように、離間制御部材7196Rは、W41方向に移動し、ホーム位置に戻る。離間制御部材7196Rがホーム位置に戻る途中で、離間制御部材7196Rの第二力付与面7196Rbは、保持部材7151Rの離間力受け面7151Rhに当接する。そして、離間制御部材7196Rは、第二力付与面7196Rbが離間力受け面7151Rhに押圧されることで、W41方向に移動しつつ、付勢ばね198の付勢力に抗して、V13方向に回転する。これは、圧縮ばね6153Rの付勢力が付勢ばね198の付勢力よりも強く設定されているためである。よって、保持部材7151Rは、下方位置のままである。
図335に示すように、現像ユニット7109が当接位置に保持され、離間制御部材7196Rがホーム位置に位置している状態では、離間制御部材7196Rの突起7196Rtは、第1下側規制面199c1に当接又は近接した状態となっている。この状態においても、現像ユニット7109は、当接部7151Rcが被当接面7116qから受ける力F33により、現像離間ばねによるモーメントM30に抗して、V2方向に付勢され、当接位置を安定的に保持する。
[現像ユニット7109の離間動作]
[現像ユニット7109の離間動作]
次に、図336~図338を用いて、現像ユニット7109が当接位置(現像位置)から離間位置(退避位置)に移動する離間動作について説明する。図336は、現像ユニット7109の離間動作を説明するための図であって、離間制御部材7196Rがホーム位置に位置する状態を示す図である。図337(a)は、離間制御部材7196Rがホーム位置からW41方向に移動している途中の状態の、被当接面7116qの近傍を示す拡大図である。図337(b)は、現像ユニット7109の離間動作を説明するための図であって、離間制御部材7196Rがホーム位置からW41方向に移動した状態を示す図である。図338は、現像ユニット7109の離間動作を説明するための図であって、離間制御部材7196RがW42方向に移動して再びホーム位置に復帰した状態を示す図である。なお、図336、図337(b)、図338ではドラムカップリング部材143、ドラムフランジ142、現像ローラギア131等の一部の部品を不図示としている。
図336は、図335と同じ状態で、移動部材6162Rは突出位置、保持部材7151Rは下方位置(第2稼働位置)、現像ユニット7109は当接位置、離間制御部材7196Rはホーム位置にそれぞれ位置している。図336に示すように、離間制御部材7196Rがホーム位置からW41方向に移動すると、保持部材7151Rの離間力受け面7151Rhが、離間制御部材7196Rの第二力付与面7196Rbに当接する。
離間制御部材7196Rの突起7196Rtは、第1下側規制面199c1に当接し、離間制御部材7196RのV13方向の回転が規制される。このため、保持部材7151Rの離間力受け面7151Rhは、離間制御部材7196Rの第二力付与面7196Rbから力F41を受ける。
保持部材7151Rは、力F41によって、圧縮ばね6153Rの付勢力F31に抗して、−ZB方向に押上げられる。なお、離間制御部材7196RをW41方向に移動させるための力は、圧縮ばね6153Rの付勢力F31よりも十分に大きく、離間制御部材7196Rが付勢力F31に負けて停止することはない。
図337(a)に示すように、保持部材7151Rが−ZB方向に押し上げられることで、保持部7151Rbに形成された斜面7151Rr及び当接部7151Rcが、駆動側カートリッジカバー部材7116の被当接面7116qに摺擦しながら−ZB方向に移動する。そして、保持部材7151Rは、斜面7151Rrと被当接面7116qとの当接が解除される位置又は上方位置よりも更に−ZB方向に移動した位置に移動する。これにより、突き当て面6162Rdと被突き当て面7151Rfとの間の距離が離間量Q2となり、保持部材7151Rは、上方位置となる。
また、斜面7151Rrと被当接面7116qとの当接が解除されることで、弾性部7116nの弾性変形が復元し、被当接面7116qはV32方向に移動する。図337(b)に示すように、斜面7151Rrと被当接面7116qとの当接が解除され、被当接面7116qがV32方向に移動すると、被当接面7116qが当接部7151Rcを押圧していた力F33(図334(b)参照)が無くなる。このため、現像ユニット7109は、不図示の現像離間ばねによるモーメントM30によってV1方向に揺動し、離間位置に位置する。
その後、図338に示すように、離間制御部材7196Rは、W42方向に移動し、ホーム位置に戻る。離間制御部材7196Rは、付勢ばね198によってV12方向に付勢されているため、W42方向に移動しつつ、V12方向に回転する。図337(b)の状態から図338の状態に移る過程で、離間制御部材7196Rの第二力付与面7196Rbは、保持部材7151Rの離間力受け面7151Rhに摺接する。
更に、離間制御部材7196RがW42方向に移動している途中で、離間制御部材7196Rの第二力付与面7196Rbは、保持部材7151Rの離間力受け面7151Rhから離間する。そして、離間制御部材7196Rの上面7196Rsは、保持部材7151Rの下面7151Rsに当接する。離間制御部材7196Rは、この状態でホーム位置まで移動する。なお、第二力付与面7196Rbが離間力受け面7151Rhから離間すると、図336で説明した力F41が無くなるため、保持部材7151Rは、圧縮ばね6153Rの付勢力F31によって、ZB方向に付勢される。これにより、保持部7151Rbが係止面7116pに係止される。規制面としての係止面7116pは、保持部7151Rbが離間保持位置(第1位置)に位置する際に、保持部7151RbがZB方向に関して離間保持位置(第1位置)から離間解除位置(第2位置)へ移動することを規制する。
図338に示すように、離間制御部材7196Rがホーム位置に位置した状態では、移動部材6162Rは突出位置、保持部材7151Rは上方位置(第1稼働位置)、現像ユニット7109は離間位置にそれぞれ位置している。そして、現像ユニット7109は、不図示の現像離間ばねによるモーメントM30によってV1方向に付勢されているため、離間位置を安定的に保持する。
以上説明したように、移動部材6162Rが待機位置に位置する際には、保持部材7151Rは、図328に示す待機位置に位置する。また、図332乃至図338に示すように、移動部材6162Rが突出位置に位置する状態では、保持部材7151Rは下方位置(第2稼働位置)又は上方位置(第1稼働位置)をとることが可能である。そして、保持部材7151Rが下方位置(第2稼働位置)に位置する際に現像ユニット7109は当接位置に位置し、保持部材7151Rが上方位置(第1稼働位置)に位置する際に現像ユニット7109は離間位置に位置する。
言い換えれば、離間力受け部としての離間力受け面7151Rhを含む保持部材7151Rは、現像ユニット7109に対して所定方向としてのZB方向に移動することにより、待機位置と、上方位置(第1稼働位置)と、下方位置(第2稼働位置)と、を取ることが可能である。上方位置(第1稼働位置)及び下方位置(第2稼働位置)は、互いに異なる位置であり、待機位置よりも現像ユニット7109から突出した位置である。また、保持部材7151Rが待機位置、上方位置(第1稼働位置)、下方位置(第2稼働位置)のそれぞれに位置しているとき、保持部材7151Rの離間力受け面7151Rhも、待機位置、上方位置(第1稼働位置)、下方位置(第2稼働位置)のそれぞれに位置していると言える。
そして、保持部材7151Rの保持部7151Rbは、現像ユニット7109が当接位置(現像位置)、保持部7151Rbが離間解除位置(第2位置)、且つ離間力受け面7151Rhが下方位置(第2稼働位置)にある状態から、離間力受け面7151Rhが離間制御部材7196Rから離間力を受けて上方位置(第1稼働位置)へ−ZB方向(所定方向)に移動することで、離間解除位置(第2位置)から離間保持位置(第1位置)へ移動する。なお、所定方向は、ZB方向及び−ZB方向を含む。
なお、上述した現像ユニット7109の当接動作は、例えばプロセスカートリッジ7100が画像形成装置本体170に装着され、画像形成装置Mにプリント開始の指令が出力されると、プリントを開始する前に実行される。そして、現像ユニット7109が当接位置(図335に示す状態)に位置する状態において、プリントが開始される。
そして、プリント終了後に、現像ユニット7109の離間動作が行われる。そして、現像ユニット7109が離間位置(図338に示す状態)に位置する状態において、画像形成装置Mは待機状態となる。なお、画像形成装置Mが待機状態にある時に、画像形成装置Mにプリント開始の指令が出力されると、上述したように現像ユニット7109の当接動作が実行される。
<実施例33の変形例>
<実施例33の変形例>
次に、図339~図343(b)を用いて、実施例33の変形例について説明する。図339は、図338と同様の状態であって、現像ユニット7109が離間位置かつ離間制御部材7196Rがホーム位置に位置する状態を示す図である。図340は、図336と同様の状態であって、現像ユニット7109が当接位置かつ離間制御部材7196RがW41方向に移動しようとしている状態を示す図である。図339及び図340は、実施例33の課題を説明するための図であり、実施例33の変形例を示す図でない。
図341は、実施例33の変形例に係る駆動側カートリッジカバー部材8116を示す斜視図である。図342(a)は、実施例33の変形例に係り、現像ユニット7109が離間位置かつ離間制御部材7196Rがホーム位置に位置する状態を示す図である。図342(b)は、図342(a)に示す状態において、サポート部8116sの近傍を示す拡大図である。図343(a)は、実施例33の変形例に係り、現像ユニット7109が当接位置かつ離間制御部材7196RがW41方向に移動しようとしている状態を示す図である。図343(b)は、図343(a)に示す状態において、サポート部8116sの近傍を示す拡大図である。
図339に示すように、実施例33では、保持部材7151Rは、圧縮ばね6153Rの付勢力F31を受ける。このため、駆動側カートリッジカバー部材7116の係止面7116pは、保持部7151Rbから上記付勢力F31を受ける。この時、付勢力F31の大きさや弾性部7116nの剛性に依っては、弾性部7116nは、付勢力F31によってその根元部7116uを中心にV31方向に弾性変形してしまう。そして、弾性部7116nのV31方向の変形量が大きいと、保持部材7151Rの保持部7151Rbが係止面7116pから脱落してしまい、適切に現像ユニット7109の離間動作及び当接動作が行えなくなってしまう虞がある。
また、図340に示すように、実施例33では、保持部材7151Rの離間力受け面7151Rhが離間制御部材7196Rの第二力付与面7196Rbから受ける力F41は、分力F41aと分力F41bに分解できる。分力F41bは、−ZB方向の力である。分力F41aは、−ZB方向に直交するXB方向の力であり、現像ユニット7109を離間位置に向けて揺動させる方向の成分を含む。
そして、圧縮ばね6153Rの付勢力F31が分力F41bよりも大きい場合、保持部材7151Rは、分力F41bによって−ZB方向には移動せず、分力F41aによって現像ユニット7109がV1方向に揺動しようとする。この場合、保持部材7151Rの当接部7151Rcは、被当接面7116qに分力F41aに起因する力F141aを加えつつ、被当接面7116qに沿って−ZB方向に移動しようとする。しかし、弾性部7116nの剛性が弱いと、保持部材7151Rが−ZB方向に移動しない状態を保たれたまま、被当接面7116qがV31方向に変形してしまうため、保持部7151Rbが離間保持位置(第1位置)へ移動する事ができない。
そこで、実施例33の変形例では、図341に示すように、駆動側カートリッジカバー部材8116にサポート部8116sを設けた。駆動側カートリッジカバー部材8116は、実施例33の駆動側カートリッジカバー部材7116の構成にサポート部8116sが追加された構成であるため、実施例33と同様に現像付勢部7116sを有している。
サポート部8116sは、弾性部7116nに沿って形成される腕部8116nと、上面8116pと、斜面8116qと、を有している。腕部8116nは、弾性部7116nよりも剛性が高く構成されている。上面8116pは、係止面7116pと面一に形成され、−XB方向に平行又は−XB方向に向かうにつれて−ZB方向に向かう面から形成される。斜面8116qは、−ZB方向に向かうにつれてXB方向に向かう斜面であり、−XB方向に臨んでいる。上面8116p及び斜面8116qは、被当接面7116qよりもV31方向における下流に配置されている。なお、保持部材7151Rの当接部7151Rcは、感光ドラム104の回転軸線方向(Y1方向及びY2方向)において、係止面7116p、被当接面7116q、上面8116p及び斜面8116qにオーバラップしている。
図342(a)(b)に示すように、現像ユニット7109が離間位置かつ離間制御部材7196Rがホーム位置に位置する状態では、駆動側カートリッジカバー部材8116の上面8116pは、保持部7151Rbから圧縮ばね6153R(図339参照、図342(a)(b)では不図示)の付勢力F31を受ける。上面8116pに連続して形成される腕部8116nは、弾性部7116nよりも剛性が高いので、V31方向に弾性変形しない。また、上面8116pが付勢力F31を受けるので、弾性部7116nはV31方向に弾性変形されるほどの力を受けない。このため、保持部材7151Rの保持部7151Rbが係止面7116pから脱落することを抑制できる。
図343(a)(b)に示すように、現像ユニット7109が当接位置かつ離間制御部材7196RがW41方向に移動しようとしている状態では、分力F41aによって現像ユニット7109が離間位置に向けて揺動したとしても、保持部材7151Rの当接部7151Rcが斜面8116qに当接すると、斜面8116qが分力F41aに起因する力F141aを受けるようになる。斜面8116qから上面8116pを介して連続して形成される腕部8116nは、弾性部7116nよりも剛性が高いので、V31方向に弾性変形しない。このため、被当接面7116qは、斜面8116qの位置よりもV31方向に逃げることはない。すなわち、サポート部8116sは、保持部7151Rbからの力を受けることで、現像付勢部7116sの所定量以上の弾性変形を規制する。よって、分力F41bによって、保持部材7151Rを−ZB方向に確実に移動させることができ、適切に当接動作及び離間動作を行うことができる。
以上の説明は、駆動側に関してのものあるが、非駆動側にも離間当接機構7150Lが配置されている。その結果、非駆動側においても同様の動作を行うことができる。駆動側と非駆動側の両側で、離間及び当接動作を行うことにより、確実に安定して現像ユニット7109を揺動軸Kを中心に揺動させることができる。
以上説明した本実施例の構成によれば、実施例1と同様の効果を得ることができる。また、本実施例では、保持部材7151RがZB方向(及び−ZB方向)のみに移動することで、現像ユニット7109を当接位置と離間位置との間で切り換えることができるので、保持部材7151Rを配置するのに必要なスペースを省スペース化することができ、プロセスカートリッジ7100を小型化することができる。
また、本実施例では、保持部7151Rb及び先端部7151Rmが保持部材7151Rに一体に設けられていたが、これに限定されない。例えば、保持部7151Rbを先端部7151Rmとは別体に設け、離間制御部材7196Rによって移動される先端部7151Rmに連動して、保持部7151Rbが第1位置(離間保持位置)と第2位置(離間解除位置)との間で移動可能に構成されてもよい。また、本実施例では、保持部材7151Rは、現像ユニット7109の現像カバー部材6128に支持されていたが、これに限定されない。例えば、保持部材7151Rは、ドラムユニット108に移動可能に支持されてもよく、また移動部材6162Rに支持されていてもよい。
また、本実施例では、板ばね等から構成される弾性部7116nを含む現像付勢部7116sによって現像ユニット7109を当接位置(現像位置)に付勢する構成としていたが、これに限定されない。例えば、ねじりコイルばね、ゴム、スポンジ等の弾性部材を用いて、保持部7151Rbを介して現像ユニット7109を当接位置(現像位置)に付勢してもよい。弾性部7116nの材質は金属やモールドなど、任意に設定してもよい。
また、実施例33は、既述の各実施例1~32と、適宜組み合わせてもよい。
また、本実施の形態の開示は、以下の構成及び方法を含む。
(構成A1)
(構成A1)
カートリッジであって、
感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、
前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、
前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、
前記第1枠体又は前記第2枠体に移動可能に支持された当接力受け部であって、前記第2ユニットが前記離間位置にある時に、前記第2ユニットを前記現像位置へ移動させるために、前記保持部を前記第1位置から前記第2位置へ向かって移動させるための当接力を受けることが可能な当接力受け部と、
を有し、
前記当接力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、
前記保持部は、前記第2ユニットが前記離間位置、前記保持部が前記第1位置、且つ前記当接力受け部が前記第1稼働位置にある状態から、前記当接力受け部が当接力を受けて前記第2稼働位置へ前記所定方向に移動することで、前記第1位置から前記第2位置へ移動する、
カートリッジ。
(構成A2)
感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、
前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、
前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、
前記第1枠体又は前記第2枠体に移動可能に支持された当接力受け部であって、前記第2ユニットが前記離間位置にある時に、前記第2ユニットを前記現像位置へ移動させるために、前記保持部を前記第1位置から前記第2位置へ向かって移動させるための当接力を受けることが可能な当接力受け部と、
を有し、
前記当接力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、
前記保持部は、前記第2ユニットが前記離間位置、前記保持部が前記第1位置、且つ前記当接力受け部が前記第1稼働位置にある状態から、前記当接力受け部が当接力を受けて前記第2稼働位置へ前記所定方向に移動することで、前記第1位置から前記第2位置へ移動する、
カートリッジ。
(構成A2)
前記当接力受け部は、前記所定方向に対して傾斜した傾斜面であり、且つ、前記感光体の回転軸線に沿って見たとき、前記所定方向に直交する方向に関して前記回転軸線に近づくにつれて、前記所定方向に関して前記回転軸線から離れるように傾斜している、
構成A1に記載のカートリッジ。
(構成A3)
構成A1に記載のカートリッジ。
(構成A3)
前記保持部は、前記第1位置にある時、前記第2ユニットが前記離間位置から前記現像位置へ移動することを規制可能で、且つ、前記第2位置にある時、前記第2ユニットが前記離間位置から前記現像位置へ移動することを許容する、
構成A1又はA2に記載のカートリッジ。
(構成A4)
構成A1又はA2に記載のカートリッジ。
(構成A4)
前記保持部は、前記第1位置にある時、前記第1枠体及び前記第2枠体と接触することで前記第2ユニットが前記離間位置から前記現像位置へ移動することを規制する、
構成A3に記載のカートリッジ。
(構成A5)
構成A3に記載のカートリッジ。
(構成A5)
前記第2ユニットを前記現像位置に向けて付勢する付勢部を更に有する、
構成A1乃至A4のいずれか一つに記載のカートリッジ。
(構成A6)
構成A1乃至A4のいずれか一つに記載のカートリッジ。
(構成A6)
前記保持部及び前記当接力受け部を含み、前記第2枠体によって前記所定方向に移動可能に支持される保持部材を更に有する、
構成A1乃至A5のいずれか一つに記載のカートリッジ。
(構成A7)
構成A1乃至A5のいずれか一つに記載のカートリッジ。
(構成A7)
前記保持部材は、前記第2ユニットを前記離間位置へ移動させるために、前記保持部を前記第2位置から前記第1位置へ向かって移動させるための離間力を受けることが可能な離間力受け部を備える、
構成A6に記載のカートリッジ。
(構成A8)
構成A6に記載のカートリッジ。
(構成A8)
前記保持部材は、少なくとも前記現像部材の回転軸線から離れる方向に前記第1枠体及び第2枠体から突出可能な突出部を備え、
前記当接力受け部及び前記離間力受け部は、前記突出部に設けられている、
構成A7に記載にカートリッジ。
(構成A9)
前記当接力受け部及び前記離間力受け部は、前記突出部に設けられている、
構成A7に記載にカートリッジ。
(構成A9)
前記第2ユニットは、前記離間力受け部が前記離間力を受けた際に、前記保持部が前記所定方向に関して前記第2位置から前記第1位置とは反対の方向に移動することを規制する第1規制面を備える、
構成A7又はA8に記載にカートリッジ。
(構成A10)
構成A7又はA8に記載にカートリッジ。
(構成A10)
前記第2ユニットは、前記第2枠体によって前記所定方向に移動可能に支持される移動部材と、前記所定方向に関して前記当接力受け部が前記現像部材の回転軸線から離れる方向に向かうように、前記保持部材を前記移動部材に対して付勢する保持部材付勢部と、を備える、
構成A6乃至A9のいずれか一つに記載にカートリッジ。
(構成A11)
構成A6乃至A9のいずれか一つに記載にカートリッジ。
(構成A11)
前記第1枠体は、前記保持部が前記第2位置に位置する際に、前記保持部が前記所定方向に関して前記第2位置から前記第1位置へ移動することを規制する第2規制面を備える、
構成A1乃至A10のいずれか一つに記載のカートリッジ。
(構成B1)
構成A1乃至A10のいずれか一つに記載のカートリッジ。
(構成B1)
カートリッジであって、
感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、
前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、
前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、
前記第1枠体又は前記第2枠体に移動可能に支持された離間力受け部であって、前記第2ユニットが前記現像位置にある時に、前記第2ユニットを前記離間位置へ移動させるために、前記保持部を前記第2位置から前記第1位置へ向かって移動させるための離間力を受けることが可能な離間力受け部と、
を有し、
前記離間力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、
前記保持部は、前記第2ユニットが前記現像位置、前記保持部が前記第2位置、且つ前記離間力受け部が前記第2稼働位置にある状態から、前記離間力受け部が離間力を受けて前記第1稼働位置へ前記所定方向に移動することで、前記第2位置から前記第1位置へ移動する、
カートリッジ。
(構成B2)
感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、
前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、
前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、
前記第1枠体又は前記第2枠体に移動可能に支持された離間力受け部であって、前記第2ユニットが前記現像位置にある時に、前記第2ユニットを前記離間位置へ移動させるために、前記保持部を前記第2位置から前記第1位置へ向かって移動させるための離間力を受けることが可能な離間力受け部と、
を有し、
前記離間力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、
前記保持部は、前記第2ユニットが前記現像位置、前記保持部が前記第2位置、且つ前記離間力受け部が前記第2稼働位置にある状態から、前記離間力受け部が離間力を受けて前記第1稼働位置へ前記所定方向に移動することで、前記第2位置から前記第1位置へ移動する、
カートリッジ。
(構成B2)
前記離間力受け部は、前記所定方向に対して傾斜した傾斜面であり、且つ、前記感光体の回転軸線に沿って見たとき、前記所定方向に直交する方向に関して前記回転軸線に近づくにつれて、前記所定方向に関して前記回転軸線に近づくように傾斜している、
構成B1に記載のカートリッジ。
(構成B3)
構成B1に記載のカートリッジ。
(構成B3)
前記第2ユニットを前記離間位置に向けて付勢する付勢部を更に有する、
構成B1又はB2に記載のカートリッジ。
(構成B4)
構成B1又はB2に記載のカートリッジ。
(構成B4)
前記第1枠体又は前記第2枠体は、前記保持部を押圧することにより前記第2ユニットを前記現像位置に向けて付勢可能な現像付勢部を備える、
構成B1乃至B3のいずれか一つに記載のカートリッジ。
(構成B5)
構成B1乃至B3のいずれか一つに記載のカートリッジ。
(構成B5)
前記現像付勢部は、前記保持部が前記第1位置から前記第2位置に移動する際に弾性変形することで、前記第2ユニットが前記現像位置に向かうように前記保持部を押圧する、
構成B4に記載のカートリッジ。
(構成B6)
構成B4に記載のカートリッジ。
(構成B6)
前記保持部は、前記第2位置に位置する際に前記現像付勢部によって押圧される当接部を備える、
構成B4又はB5に記載のカートリッジ。
(構成B7)
構成B4又はB5に記載のカートリッジ。
(構成B7)
前記保持部は、前記第2枠体によって前記所定方向に移動可能に支持され、
前記現像付勢部は、前記第1枠体に設けられる、
構成B4乃至B6のいずれか一つに記載のカートリッジ。
(構成B8)
前記現像付勢部は、前記第1枠体に設けられる、
構成B4乃至B6のいずれか一つに記載のカートリッジ。
(構成B8)
前記第1枠体は、前記保持部からの力を受けることで、前記現像付勢部の所定量以上の弾性変形を規制するサポート部を備える、
構成B7に記載にカートリッジ。
(構成B9)
構成B7に記載にカートリッジ。
(構成B9)
前記保持部及び前記離間力受け部を含み、前記第2枠体によって前記所定方向に移動可能に支持される保持部材を更に有する、
構成B1乃至B8のいずれか一つに記載にカートリッジ。
(構成B10)
構成B1乃至B8のいずれか一つに記載にカートリッジ。
(構成B10)
前記保持部材は、前記第2ユニットを前記現像位置へ移動させるために、前記保持部を前記第1位置から前記第2位置へ向かって移動させるための当接力を受けることが可能な当接力受け部を備える、
構成B9に記載にカートリッジ。
(構成B11)
構成B9に記載にカートリッジ。
(構成B11)
前記保持部材は、少なくとも前記現像部材の回転軸線から離れる方向に前記第1枠体及び第2枠体から突出可能な突出部を備え、
前記当接力受け部及び前記離間力受け部は、前記突出部に設けられている、
構成B10に記載のカートリッジ。
(構成B12)
前記当接力受け部及び前記離間力受け部は、前記突出部に設けられている、
構成B10に記載のカートリッジ。
(構成B12)
前記第2ユニットは、前記第2枠体によって前記所定方向に移動可能に支持される移動部材と、前記所定方向に関して前記離間力受け部が前記現像部材の回転軸線から離れる方向に向かうように、前記保持部材を前記移動部材に対して付勢する保持部材付勢部と、を備える、
構成B9乃至B11のいずれか一つに記載のカートリッジ。
(構成B13)
構成B9乃至B11のいずれか一つに記載のカートリッジ。
(構成B13)
前記第1枠体は、前記保持部が前記第1位置に位置する際に、前記保持部が前記所定方向に関して前記第1位置から前記第2位置へ移動することを規制する規制面を備える、
構成B1乃至B12のいずれか1項に記載のカートリッジ。
(構成C1)
構成B1乃至B12のいずれか1項に記載のカートリッジ。
(構成C1)
構成A1乃至B13のいずれか一つに記載のカートリッジと、
前記カートリッジを装着可能な装置本体と、を備える、
画像形成装置。
前記カートリッジを装着可能な装置本体と、を備える、
画像形成装置。
感光体を備える第1ユニットと、感光体にトナーを付着させる現像部材を備え、現像位置と離間位置との間を移動可能な第2ユニットを備えるカートリッジ及び電子写真画像形成装置が提供される。
本発明は上記実施の形態に制限されるものではなく、本発明の精神及び範囲から離脱することなく、様々な変更及び変形が可能である。従って、本発明の範囲を公にするために以下の請求項を添付する。
本願は、2022年06月09日提出の日本国特許出願特願2022−093445を基礎として優先権を主張するものであり、その記載内容の全てをここに援用する。
Claims (25)
- カートリッジであって、
感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、
前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、
前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、
前記第1枠体又は前記第2枠体に移動可能に支持された当接力受け部であって、前記第2ユニットが前記離間位置にある時に、前記第2ユニットを前記現像位置へ移動させるために、前記保持部を前記第1位置から前記第2位置へ向かって移動させるための当接力を受けることが可能な当接力受け部と、
を有し、
前記当接力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、
前記保持部は、前記第2ユニットが前記離間位置、前記保持部が前記第1位置、且つ前記当接力受け部が前記第1稼働位置にある状態から、前記当接力受け部が当接力を受けて前記第2稼働位置へ前記所定方向に移動することで、前記第1位置から前記第2位置へ移動する、
カートリッジ。 - 前記当接力受け部は、前記所定方向に対して傾斜した傾斜面であり、且つ、前記感光体の回転軸線に沿って見たとき、前記所定方向に直交する方向に関して前記回転軸線に近づくにつれて、前記所定方向に関して前記回転軸線から離れるように傾斜している、
請求項1に記載のカートリッジ。 - 前記保持部は、前記第1位置にある時、前記第2ユニットが前記離間位置から前記現像位置へ移動することを規制可能で、且つ、前記第2位置にある時、前記第2ユニットが前記離間位置から前記現像位置へ移動することを許容する、
請求項1に記載のカートリッジ。 - 前記保持部は、前記第1位置にある時、前記第1枠体及び前記第2枠体と接触することで前記第2ユニットが前記離間位置から前記現像位置へ移動することを規制する、
請求項3に記載のカートリッジ。 - 前記第2ユニットを前記現像位置に向けて付勢する付勢部を更に有する、
請求項1に記載のカートリッジ。 - 前記保持部及び前記当接力受け部を含み、前記第2枠体によって前記所定方向に移動可能に支持される保持部材を更に有する、
請求項1に記載のカートリッジ。 - 前記保持部材は、前記第2ユニットを前記離間位置へ移動させるために、前記保持部を前記第2位置から前記第1位置へ向かって移動させるための離間力を受けることが可能な離間力受け部を備える、
請求項6に記載のカートリッジ。 - 前記保持部材は、少なくとも前記現像部材の回転軸線から離れる方向に前記第1枠体及び第2枠体から突出可能な突出部を備え、
前記当接力受け部及び前記離間力受け部は、前記突出部に設けられている、
請求項7に記載のカートリッジ。 - 前記第2ユニットは、前記離間力受け部が前記離間力を受けた際に、前記保持部が前記所定方向に関して前記第2位置から前記第1位置とは反対の方向に移動することを規制する第1規制面を備える、
請求項7に記載のカートリッジ。 - 前記第2ユニットは、前記第2枠体によって前記所定方向に移動可能に支持される移動部材と、前記所定方向に関して前記当接力受け部が前記現像部材の回転軸線から離れる方向に向かうように、前記保持部材を前記移動部材に対して付勢する保持部材付勢部と、を備える、
請求項6に記載のカートリッジ。 - 前記第1枠体は、前記保持部が前記第2位置に位置する際に、前記保持部が前記所定方向に関して前記第2位置から前記第1位置へ移動することを規制する第2規制面を備える、
請求項1に記載のカートリッジ。 - カートリッジであって、
感光体と、前記感光体を回転可能に支持する第1枠体と、を備える第1ユニットと、
前記感光体にトナーを付着させる現像部材と、前記現像部材を回転可能に支持する第2枠体と、を備え、前記第1ユニットに対して移動することで、前記現像部材から前記感光体へトナーを付着させることが可能な現像位置と前記現像部材の少なくとも一部が前記感光体から離れて配置された離間位置との間を移動可能な第2ユニットと、
前記第1ユニット又は前記第2ユニットに移動可能に支持され、前記第1ユニットと前記第2ユニットの相対的な位置を規制し、前記第1ユニットによって前記第2ユニットを前記離間位置で保持するための第1位置と、前記第1ユニットによって前記第2ユニットを前記現像位置で保持するための第2位置と、の間を移動可能な保持部と、
前記第1枠体又は前記第2枠体に移動可能に支持された離間力受け部であって、前記第2ユニットが前記現像位置にある時に、前記第2ユニットを前記離間位置へ移動させるために、前記保持部を前記第2位置から前記第1位置へ向かって移動させるための離間力を受けることが可能な離間力受け部と、
を有し、
前記離間力受け部は、前記第2枠体に対して所定方向に移動することにより、(i)待機位置、(ii)前記待機位置よりも前記第2枠体から突出した第1稼働位置、及び、(iii)前記待機位置よりも前記第2枠体から突出し、前記所定方向に関して前記第1稼働位置と異なる位置である第2稼働位置、をとることが可能であり、
前記保持部は、前記第2ユニットが前記現像位置、前記保持部が前記第2位置、且つ前記離間力受け部が前記第2稼働位置にある状態から、前記離間力受け部が離間力を受けて前記第1稼働位置へ前記所定方向に移動することで、前記第2位置から前記第1位置へ移動する、
カートリッジ。 - 前記離間力受け部は、前記所定方向に対して傾斜した傾斜面であり、且つ、前記感光体の回転軸線に沿って見たとき、前記所定方向に直交する方向に関して前記回転軸線に近づくにつれて、前記所定方向に関して前記回転軸線に近づくように傾斜している、
請求項12に記載のカートリッジ。 - 前記第2ユニットを前記離間位置に向けて付勢する付勢部を更に有する、
請求項12に記載のカートリッジ。 - 前記第1枠体又は前記第2枠体は、前記保持部を押圧することにより前記第2ユニットを前記現像位置に向けて付勢可能な現像付勢部を備える、
請求項12に記載のカートリッジ。 - 前記現像付勢部は、前記保持部が前記第1位置から前記第2位置に移動する際に弾性変形することで、前記第2ユニットが前記現像位置に向かうように前記保持部を押圧する、
請求項15に記載のカートリッジ。 - 前記保持部は、前記第2位置に位置する際に前記現像付勢部によって押圧される当接部を備える、
請求項15に記載のカートリッジ。 - 前記保持部は、前記第2枠体によって前記所定方向に移動可能に支持され、
前記現像付勢部は、前記第1枠体に設けられる、
請求項15に記載のカートリッジ。 - 前記第1枠体は、前記保持部からの力を受けることで、前記現像付勢部の所定量以上の弾性変形を規制するサポート部を備える、
請求項18に記載のカートリッジ。 - 前記保持部及び前記離間力受け部を含み、前記第2枠体によって前記所定方向に移動可能に支持される保持部材を更に有する、
請求項12に記載のカートリッジ。 - 前記保持部材は、前記第2ユニットを前記現像位置へ移動させるために、前記保持部を前記第1位置から前記第2位置へ向かって移動させるための当接力を受けることが可能な当接力受け部を備える、
請求項20に記載のカートリッジ。 - 前記保持部材は、少なくとも前記現像部材の回転軸線から離れる方向に前記第1枠体及び第2枠体から突出可能な突出部を備え、
前記当接力受け部及び前記離間力受け部は、前記突出部に設けられている、
請求項21に記載のカートリッジ。 - 前記第2ユニットは、前記第2枠体によって前記所定方向に移動可能に支持される移動部材と、前記所定方向に関して前記離間力受け部が前記現像部材の回転軸線から離れる方向に向かうように、前記保持部材を前記移動部材に対して付勢する保持部材付勢部と、を備える、
請求項20に記載のカートリッジ。 - 前記第1枠体は、前記保持部が前記第1位置に位置する際に、前記保持部が前記所定方向に関して前記第1位置から前記第2位置へ移動することを規制する規制面を備える、
請求項12に記載のカートリッジ。 - 請求項1に記載のカートリッジと、
前記カートリッジを装着可能な装置本体と、を備える、
画像形成装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-093445 | 2022-06-09 | ||
| JP2022093445A JP2023180292A (ja) | 2022-06-09 | 2022-06-09 | カートリッジ、画像形成装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023238957A1 true WO2023238957A1 (ja) | 2023-12-14 |
Family
ID=89118477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/021639 WO2023238957A1 (ja) | 2022-06-09 | 2023-06-05 | カートリッジ、画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2023180292A (ja) |
| WO (1) | WO2023238957A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080138113A1 (en) * | 2006-12-11 | 2008-06-12 | Niko Jay Murrell | Disturbance Feature to Promote Image Process Member Drive Train Engagement |
| JP2010092078A (ja) * | 2007-06-29 | 2010-04-22 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP2022050263A (ja) * | 2020-09-17 | 2022-03-30 | キヤノン株式会社 | カートリッジ、画像形成装置 |
-
2022
- 2022-06-09 JP JP2022093445A patent/JP2023180292A/ja active Pending
-
2023
- 2023-06-05 WO PCT/JP2023/021639 patent/WO2023238957A1/ja unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080138113A1 (en) * | 2006-12-11 | 2008-06-12 | Niko Jay Murrell | Disturbance Feature to Promote Image Process Member Drive Train Engagement |
| JP2010092078A (ja) * | 2007-06-29 | 2010-04-22 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP2022050263A (ja) * | 2020-09-17 | 2022-03-30 | キヤノン株式会社 | カートリッジ、画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023180292A (ja) | 2023-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2022059803A1 (ja) | 画像形成装置、カートリッジ | |
| JP7458840B2 (ja) | 電子写真画像形成装置、カートリッジ | |
| WO2023238957A1 (ja) | カートリッジ、画像形成装置 | |
| JP2022050263A (ja) | カートリッジ、画像形成装置 | |
| WO2023176947A1 (ja) | 画像形成装置、カートリッジ | |
| WO2023210511A1 (ja) | カートリッジ、画像形成装置 | |
| TWI854156B (zh) | 畫像形成裝置、卡匣 | |
| JP2022050262A (ja) | カートリッジ、画像形成装置 | |
| CN118818935A (zh) | 电子照相图像形成装置和盒 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23819937 Country of ref document: EP Kind code of ref document: A1 |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112024020213 Country of ref document: BR |