WO2023238585A1 - 遮断システム - Google Patents
遮断システム Download PDFInfo
- Publication number
- WO2023238585A1 WO2023238585A1 PCT/JP2023/017539 JP2023017539W WO2023238585A1 WO 2023238585 A1 WO2023238585 A1 WO 2023238585A1 JP 2023017539 W JP2023017539 W JP 2023017539W WO 2023238585 A1 WO2023238585 A1 WO 2023238585A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- current sensor
- bus bar
- current
- wide surface
- sensor
- Prior art date
Links
- 230000004907 flux Effects 0.000 claims description 70
- 238000002955 isolation Methods 0.000 claims description 9
- 230000002427 irreversible effect Effects 0.000 claims description 2
- 238000005259 measurement Methods 0.000 description 25
- 230000008901 benefit Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 17
- 239000000758 substrate Substances 0.000 description 16
- 239000004020 conductor Substances 0.000 description 7
- 230000005856 abnormality Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 238000001816 cooling Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 239000003721 gunpowder Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R15/00—Details of measuring arrangements of the types provided for in groups G01R17/00 - G01R29/00, G01R33/00 - G01R33/26 or G01R35/00
- G01R15/14—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks
- G01R15/18—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks using inductive devices, e.g. transformers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R15/00—Details of measuring arrangements of the types provided for in groups G01R17/00 - G01R29/00, G01R33/00 - G01R33/26 or G01R35/00
- G01R15/14—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks
- G01R15/20—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks using galvano-magnetic devices, e.g. Hall-effect devices, i.e. measuring a magnetic field via the interaction between a current and a magnetic field, e.g. magneto resistive or Hall effect devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H3/00—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H3/00—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection
- H02H3/02—Details
- H02H3/05—Details with means for increasing reliability, e.g. redundancy arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H3/00—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection
- H02H3/08—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection responsive to excess current
- H02H3/087—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection responsive to excess current for dc applications
Definitions
- the present disclosure relates to a shutoff system that shuts off a power supply route.
- Patent Document 1 discloses a pyro-fuse control circuit.
- the pyrofuse control circuit includes a current sensing circuit configured to determine whether the current flowing through the conductor exceeds a threshold current.
- the current sensing circuit is then configured to measure a voltage applied to a shunt resistor placed on the conductor. That is, the current sensing circuit measures the current flowing through the conductor via the shunt resistor and determines whether the current flowing through the conductor exceeds a threshold value.
- the present disclosure provides a cutoff system that can suppress the generation of heat caused by current flowing through the bus bar.
- a shutoff system includes a bus bar, a shutoff device, a first current sensor, and a control circuit.
- the bus bar is inserted into a power supply path.
- the cutoff device cuts off the power supply path when a portion of the bus bar is cut off.
- the first current sensor measures the current flowing through the bus bar.
- the control circuit controls driving of the interrupting device based on the measured value of the first current sensor.
- the first current sensor is a non-contact type current sensor, and is arranged at a distance from the bus bar.
- shutoff system of the present disclosure there is an advantage that generation of heat caused by current flowing through the bus bar can be suppressed.
- FIG. 1 is a diagram showing a schematic configuration of a shutoff system according to a first embodiment.
- FIG. 2 is a schematic diagram of the current sensor and bus bar according to the first embodiment viewed from above.
- FIG. 3 is a schematic diagram of the current sensor and bus bar according to the first embodiment, viewed from the right.
- FIG. 4 is a diagram showing a schematic configuration of a shutoff system according to the second embodiment.
- FIG. 5 is a diagram showing a schematic configuration of a shutoff system according to Embodiment 3.
- FIG. 6 is a diagram showing a schematic configuration of a shutoff system according to Embodiment 4.
- FIG. 7 is a schematic diagram of the first current sensor, second current sensor, and bus bar according to the fourth embodiment, viewed from the right.
- FIG. 8 is a diagram showing a schematic configuration of a shutoff system according to Embodiment 5.
- each figure is a schematic diagram and is not necessarily strictly illustrated. Therefore, for example, the scale etc. of each figure do not necessarily match. Furthermore, in each figure, components that are substantially the same as those in other figures are designated by the same reference numerals, and overlapping explanations will be omitted or simplified.
- the cutoff system is mounted on a vehicle such as an automobile, and is provided in a power supply path for supplying power from a battery to a load.
- the cutoff system is a system that cuts off the supply of power when an abnormality occurs in the power supply path.
- the battery is, for example, a secondary battery such as a lithium ion battery.
- the load is, for example, an electrical device such as a motor. By discharging the battery, the battery supplies DC power to the load via the power supply path. Further, the battery is charged by receiving DC power from the load via the power supply path.
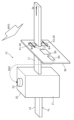
- FIG. 1 is a diagram showing a schematic configuration of a shutoff system 1 according to the first embodiment.
- the cutoff system 1 includes a busbar 10, a cutoff device 20, a board 30, a current sensor 40, a control circuit 50, and an ignition circuit 60.
- the bus bar 10 is a linear and flat conductor, and is arranged to penetrate a case 21 that forms the outer shell of the disconnection device 20.
- the upper surface (the upper surface in FIG. 1) and the lower surface (the lower surface in FIG. 1) of the bus bar 10 are the left side (the surface on the near side in the paper in FIG. 1) and the right side (the surface on the back side in the paper in FIG. 1). It has a wide surface with a larger dimension in the width direction compared to the .
- the upper surface (or lower surface) of the bus bar 10 is also referred to as the wide surface 11.
- a first end of both longitudinal ends of the bus bar 10 is connected to a positive electrode (or negative electrode) of a battery, and a second end is connected to one end (or other end) of a load. That is, the bus bar 10 is inserted into the power supply path PL that connects the positive electrode (or negative electrode) of the battery and one end (or the other end) of the load. Note that the bus bar 10 may be a part of the component of the disconnection device 20.
- the cutoff device 20 is a device that cuts off the supply of power in the power supply path PL.
- the shutoff device 20 is a pyrofuse (pyrotechnic shutoff device, irreversible pyrotechnic shutoff device).
- the cutoff device 20 cuts off a portion of the bus bar 10 based on the cutoff signal output from the ignition circuit 60, thereby cutting off the power supply path PL.
- the cutoff device 20 cuts off the power supply path PL by dividing a portion of the bus bar 10 located inside the cutoff device 20 with a piston housed inside the cutoff device 20.
- the shutoff device 20 includes a case 21 forming an outer shell, a piston movable in a direction perpendicular to the wide surface 11 of the bus bar 10 (vertical direction in FIG. 1), and an ignition part 22 that activates the piston. It is equipped with. Note that in FIG. 1, illustration of the piston is omitted.
- the case 21 has a cylindrical shape that is long in the direction orthogonal to the wide surface 11 of the bus bar 10.
- the bus bar 10 is disposed to penetrate the case 21. Further, inside the case 21, a part where the bus bar 10 is divided, a piston, and an ignition part 22 are arranged.
- the case 21 has a rectangular parallelepiped shape in FIG. 1, this does not necessarily represent the actual shape.
- the ignition unit 22 is mainly provided inside the case 21. A portion of the ignition section 22 is exposed to the outside of the case 21 as an input terminal that receives a cutoff signal from the ignition circuit 60.
- the ignition unit 22 operates the piston when receiving a cutoff signal from the ignition circuit 60, that is, when an abnormality occurs in the power supply path PL.
- the occurrence of an abnormality in the power supply path PL here means that an overcurrent flows in the power supply path PL, in other words, in the bus bar 10 due to, for example, a short circuit.
- the ignition unit 22 upon receiving the cutoff signal from the ignition circuit 60, the ignition unit 22 ignites explosives to rapidly expand the gas in the case 21, thereby causing the piston to move toward the bus bar 10 located in the case 21. Move at high speed towards one part. As a result, the piston collides with a part of the bus bar 10, part of the bus bar 10 is separated, and the power supply path PL is cut off.
- the substrate 30 is rectangular and flat, and is made of an electrically insulating material.
- the substrate 30 is arranged above the bus bar 10.
- a current sensor 40, a control circuit 50, and an ignition circuit 60 are mounted and arranged on the upper surface of the substrate 30. Since the current sensor 40 is arranged above the bus bar 10 with the electrically insulating substrate 30 in between, the current sensor 40 is arranged at a predetermined distance from the bus bar 10 and is electrically insulated from the bus bar 10. ing. That is, the current sensor 40 is arranged so as not to come into contact with the bus bar 10.
- the substrate 30 may be placed on the top surface of the bus bar 10, or may be placed so as not to come into contact with the bus bar 10, such as by being fixed to another member around the isolation system 1.
- the current sensor 40 is a sensor that measures the current Ib flowing through the bus bar 10, and is a non-contact current sensor that is placed with a space between it and the bus bar 10.
- the current sensor 40 is particularly a coreless magnetic sensor, and is further a current sensor using a TMR (Tunnel Magnetoresistive) element as a magnetoresistive element.
- TMR Tunnelnel Magnetoresistive
- the magnetic resistance of the magnetoresistive element (here, TMR element) changes depending on the magnitude of the magnetic flux passing through the current sensor 40.
- the current sensor 40 is configured by an IC (Integrated Circuit) that includes a magnetoresistive element and a signal processing circuit.
- the signal processing circuit amplifies the potential difference caused by passing a current through the magnetoresistive element, processes the amplified potential difference, and outputs a signal corresponding to the magnitude of the magnetic flux passing through the current sensor 40.
- the current flowing through the magnetoresistive element is a current flowing from a power source for driving the current sensor 40, and is not the current Ib flowing through the bus bar 10. Further, the current flowing through the magnetoresistive element is very small compared to the current flowing through the bus bar 10.
- the magnetic flux passing through the current sensor 40 changes depending on the magnitude of the current Ib flowing through the bus bar 10. Therefore, the current sensor 40 can measure the current Ib flowing through the bus bar 10 without contacting the bus bar 10 based on the magnitude of the magnetic resistance of the magnetoresistive element, in other words, the magnitude of the magnetic flux. .
- the current sensor 40 is a magnetic sensor that can detect the magnetic flux passing through the current sensor 40 in one axis. Specifically, the current sensor 40 can detect magnetic flux along one axis along the width direction of the wide surface 11 of the bus bar 10 .
- FIG. 2 is a schematic diagram of the current sensor 40 and bus bar 10 according to the first embodiment viewed from above.
- illustration of the cutoff device 20, the board 30, the control circuit 50, and the ignition circuit 60 is omitted.
- FIG. 3 is a schematic diagram of the current sensor 40 and bus bar 10 according to the first embodiment, viewed from the right in FIG. 1.
- illustration of the cutoff device 20, the board 30, the control circuit 50, and the ignition circuit 60 is omitted.
- this space is a place where the change in the magnetic flux ⁇ 0 generated by the current Ib flowing through the bus bar 10 is relatively small. Therefore, if the current sensor 40 is placed in this space, even if the current sensor 40 is misaligned during design, the magnetic flux ⁇ 0 passing through the current sensor 40 will hardly change, so the misalignment of the current sensor 40 will be avoided. This has the advantage that the measurement accuracy of the current sensor 40 is not easily affected.
- the control circuit 50 is a circuit that controls the drive of the interrupting device 20 based on the measured value of the current sensor 40.
- the control circuit 50 is composed of, for example, an IC. Further, the control circuit 50 is electrically connected to the current sensor 40 and is configured to obtain the measured value of the current sensor 40.
- the control circuit 50 compares the measured value of the current sensor 40, that is, the current value of the current Ib flowing through the bus bar 10, with a threshold value stored in advance in a memory or the like, and determines that the current value exceeds the threshold value. Then, an electric signal is output to the ignition circuit 60. This electric signal is amplified by the ignition circuit 60, and the amplified electric signal is input to the ignition section 22 of the disconnection device 20 as a disconnection signal. This causes the ignition section 22 of the shutoff device 20 to operate the piston.
- the control circuit 50 monitors whether an overcurrent is flowing through the bus bar 10, that is, whether an abnormality has occurred in the power supply path PL, by referring to the measured value of the current sensor 40. .
- the control circuit 50 outputs a cutoff signal to the ignition section 22 of the cutoff device 20 via the ignition circuit 60, thereby driving the cutoff device 20 to The power supply path PL is cut off by dividing a part of the power supply path PL.
- control circuit 50 when the control circuit 50 is communicably connected to, for example, an ECU (Electronic Control Unit) mounted on a vehicle, the control circuit 50 uses the reception of a signal output from the ECU notifying the occurrence of an abnormality as a trigger to generate electricity. A signal may be output to the ignition circuit 60.
- ECU Electronic Control Unit
- the ignition circuit 60 is a circuit that amplifies the electrical signal output from the control circuit 50 and outputs the amplified electrical signal (that is, a cutoff signal) to the ignition section 22 of the cutoff device 20.
- the ignition circuit 60 is configured by, for example, an IC.
- the ignition circuit 60 amplifies the electric signal output from the control circuit 50 to a level that can ignite the gunpowder included in the ignition section 22 .
- the current sensor 40 is a non-contact type current sensor arranged with a space between the current sensor 40 and the bus bar 10 . Therefore, the current Ib flowing through the bus bar 10 does not flow through the current sensor 40, so even in applications where a large current flows in the power supply path PL, no large current flows through the current sensor 40, and the current sensor 40 Excessive heat is not generated. Therefore, the shutoff system 1 according to the first embodiment has the advantage that generation of heat caused by the current Ib flowing through the bus bar 10 can be suppressed. Therefore, in the cutoff system 1 according to the first embodiment, a structure for cooling the heat generated by the current sensor 40 is not required, so that the manufacturing cost of the cutoff system 1 can be reduced.
- the current sensor 40 is a coreless type current sensor. Therefore, since the current sensor 40 does not require a magnetic core, there is no measurement error due to magnetic hysteresis, and the measurement accuracy of the current Ib flowing through the bus bar 10 is higher than that of a current sensor using a magnetic core. There are advantages.
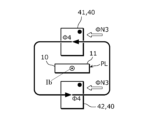
- FIG. 4 is a diagram showing a schematic configuration of a shutoff system 1A according to the second embodiment.
- the interruption system 1A according to the second embodiment differs from the interruption system 1 according to the first embodiment mainly in that it includes a plurality of current sensors 40.
- descriptions of common points with the shutoff system 1 according to Embodiment 1 will be omitted.
- the shutoff system 1A includes a plurality of (here, two) current sensors 40.
- one current sensor 40 of the two current sensors 40 is also referred to as a first current sensor 41, and the other current sensor 40 is also referred to as a second current sensor 42.
- Each of the first current sensor 41 and the second current sensor 42 is a magnetic sensor that can detect magnetic flux in two axes.
- the first current sensor 41 and the second current sensor 42 both have an axis along the width direction of the wide surface 11 of the bus bar 10 and an axis along the direction perpendicular to the wide surface 11 of the bus bar 10. , magnetic flux can be detected in two axes.
- the first current sensor 41 and the second current sensor 42 are both arranged to face the upper surface of the bus bar 10.
- the plurality of current sensors 40 are all arranged on the same side facing the wide surface 11 (here, above the wide surface 11).
- the first current sensor 41 and the second current sensor 42 are located inside the wide surface 11 of the bus bar 10 when viewed from above (that is, viewed from a direction perpendicular to the wide surface 11 of the bus bar 10). It is arranged to fit in.
- first current sensor 41 and the second current sensor 42 are arranged so as to be lined up along the longitudinal direction of the bus bar 10. Therefore, the magnetic flux that is generated when the current Ib flows through the bus bar 10 and passes through the first current sensor 41 and the magnetic flux that is generated when the current Ib flows through the bus bar 10 and passes through the second current sensor 42 are almost the same. They are the same size and have the same orientation. In the following, these magnetic fluxes will be referred to as "magnetic flux ⁇ 1".
- the first current sensor 41 and the second current sensor 42 are the same type of sensor. However, the first current sensor 41 and the second current sensor 42 are arranged such that they are rotated 180 degrees from each other in a plane parallel to the wide surface 11 of the bus bar 10 . Therefore, the first current sensor 41 and the second current sensor 42 have different polarities of current measurement values.
- the first current sensor 41 outputs a measured value of positive polarity
- the second current sensor 42 outputs a measured value of negative polarity.
- the control circuit 50 is electrically connected to each of the first current sensor 41 and the second current sensor 42, and is configured to obtain the measured value of the first current sensor 41 and the measured value of the second current sensor 42. It is composed of Then, the control circuit 50 calculates the current value of the current Ib flowing through the bus bar 10 based on the measured value of the first current sensor 41 and the measured value of the second current sensor 42, and sets the calculated current value and the threshold value. By comparing the values, it is monitored whether or not an overcurrent is flowing through the bus bar 10.
- control circuit 50 in the second embodiment executes the process of calculating the current value of the current Ib flowing through the bus bar 10 using the measured values of each of the plurality of current sensors 40. This is different from the circuit 50. Specifically, the control circuit 50 calculates the difference between the measured value of the first current sensor 41 and the measured value of the second current sensor 42, and divides the calculated difference by 2, so that the current flows to the bus bar 10. Calculate the current value of current Ib.
- the second embodiment at least a part of the external noise is removed (that is, noise canceling) by referring to the measured value of the first current sensor 41 and the measured value of the second current sensor 42 as described above. This suppresses a decrease in measurement accuracy of the current Ib flowing through the bus bar 10.
- f( ⁇ 1) represents the current value corresponding to the magnetic flux ⁇ 1 passing through the first current sensor 41
- f(- ⁇ 1) represents the current value corresponding to the magnetic flux ⁇ 1 passing through the first current sensor 42. represents the current value corresponding to the magnetic flux ⁇ 1 passing through.
- f( ⁇ N1) represents a current value corresponding to the magnetic flux ⁇ N1 passing through each of the first current sensor 41 and the second current sensor 42.
- the magnetic flux ⁇ N1 is a magnetic flux included in external noise along a direction orthogonal to the wide surface 11 of the bus bar 10.
- the wide surface of the bus bar 10 of the external noise is Magnetic flux along the direction perpendicular to 11 can be canceled. That is, in the cutoff system 1A according to the second embodiment, at least a portion of the external noise is removed by referring to the measured values of the first current sensor 41 and the second current sensor 42 that can be detected in two axes. This has the advantage that it is possible to suppress a decrease in measurement accuracy of the current Ib flowing through the bus bar 10.
- the control circuit 50 may further have a function of detecting a failure of the current sensor 40. Specifically, the control circuit 50 calculates the difference between the measured value of the first current sensor 41 and the measured value of the second current sensor 42, and sets the calculated difference to a predetermined threshold value stored in advance in a memory or the like. Monitor whether it is within the range. Then, the control circuit 50 detects that one of the first current sensor 41 and the second current sensor 42 has failed when the calculated difference deviates from a predetermined threshold range. In this case, for example, the control circuit 50 notifies the user of the abnormality, and the first current sensor 41 and the second current sensor 42 are replaced with new ones, so that the current Ib flowing through the bus bar 10 cannot be accurately measured. Improvements can be made.
- the shutoff system 1A may include three current sensors 40.
- the control circuit 50 has a function of detecting failure of the current sensor 40, it is possible to specify which current sensor 40 is malfunctioning. For example, the control circuit 50 selects two current sensors 40 out of the three current sensors 40, calculates the difference between the measured values of each of the two selected current sensors 40, and sets the calculated difference within a predetermined threshold range. Monitor whether it is within the range. Since there are six combinations of selecting two current sensors 40 from three current sensors 40, the control circuit 50 monitors whether the calculated difference falls within a predetermined threshold range for each of the six combinations. .
- the control circuit 50 can identify the faulty current sensor 40. In this case, by replacing only the faulty current sensor 40 with a new one, it is possible to improve the situation in which the current Ib flowing through the bus bar 10 cannot be accurately measured.
- FIG. 5 is a diagram showing a schematic configuration of a shutoff system 1B according to the third embodiment.
- the interruption system 1B according to the third embodiment differs from the interruption system 1A according to the second embodiment mainly in the arrangement of the plurality of current sensors 40.
- description of the points common to the shutoff system 1A according to the second embodiment will be omitted.
- the first current sensor 41 and the second current sensor 42 are both magnetic sensors that can detect magnetic flux in one axis, similar to the current sensor 40 in the first embodiment. Specifically, both the first current sensor 41 and the second current sensor 42 can detect magnetic flux along an axis along the width direction of the wide surface 11 of the bus bar 10 .
- the first current sensor 41 and the second current sensor 42 are both arranged to face the upper surface of the bus bar 10.
- the plurality of current sensors 40 are all arranged on the same side facing the wide surface 11 (here, above the wide surface 11).
- the first current sensor 41 is arranged so as to fit inside the wide surface 11 of the bus bar 10 when viewed from above (that is, when viewed from a direction perpendicular to the wide surface 11 of the bus bar 10).
- the second current sensor 42 is arranged at a predetermined distance from the bus bar 10. Specifically, the second current sensor 42 is arranged along the width direction of the wide surface 11 of the bus bar 10 together with the first current sensor 41, and is arranged so that the magnetic flux ⁇ 3 is much smaller than the magnetic flux ⁇ 2. It is located in
- the magnetic flux ⁇ 2 is a magnetic flux generated by the current Ib flowing through the bus bar 10 and passing through the first current sensor 41.
- the magnetic flux ⁇ 3 is a magnetic flux generated by the current Ib flowing through the bus bar 10 and passes through the second current sensor 42, and has the same direction as the magnetic flux ⁇ 2.
- the magnetic flux ⁇ 3 is about one tenth of the magnetic flux ⁇ 2.
- magnetic flux ⁇ N2 the magnetic flux that passes through the first current sensor 41 among the external noises and the magnetic flux that passes through the second current sensor 42 among the external noises have almost the same magnitude and are in the same direction.
- magnetic flux ⁇ N2 the magnetic flux of these external noises.
- the first current sensor 41 and the second current sensor 42 are the same type of sensors, and the polarity of the current measurement value is also the same. That is, in the third embodiment, the first current sensor 41 and the second current sensor 42 are arranged without being rotated by 180 degrees in a plane parallel to the wide surface 11 of the bus bar 10.
- the control circuit 50 calculates the current value of the current Ib flowing through the bus bar 10 by calculating the difference between the measured value of the first current sensor 41 and the measured value of the second current sensor 42. . That is, in Embodiment 3, as in Embodiment 2, at least part of external noise is removed (that is, noise By canceling the current Ib flowing through the bus bar 10, a decrease in measurement accuracy of the current Ib flowing through the bus bar 10 is suppressed.
- Equation (4) “f( ⁇ 2)” represents the current value corresponding to the magnetic flux ⁇ 2 passing through the first current sensor 41. Furthermore, in Equation (5), “f( ⁇ 3)” represents the current value corresponding to the magnetic flux ⁇ 3 passing through the second current sensor 42. Furthermore, in equations (4) and (5), “f( ⁇ N2)” represents a current value corresponding to the magnetic flux ⁇ N2 passing through each of the first current sensor 41 and the second current sensor 42.
- the magnetic flux ⁇ N2 is a magnetic flux included in the external noise along the width direction of the wide surface 11 of the bus bar 10.
- Equation (6) Since the magnetic flux ⁇ 3 is much smaller than the magnetic flux ⁇ 2, “f( ⁇ 2)>>f( ⁇ 3)” and “f( ⁇ 3)” is ignored.
- the magnetic flux along the width direction of the wide surface 11 of the bus bar 10, which is included in the external noise is reduced. Can be canceled. That is, in the interrupting system 1B according to the third embodiment, at least a part of the external noise is removed by referring to the measured values of the first current sensor 41 and the second current sensor 42 that can be detected in one axis. This has the advantage that it is possible to suppress a decrease in measurement accuracy of the current Ib flowing through the bus bar 10.
- control circuit 50 may further have a function of detecting a failure of the current sensor 40, similarly to the cutoff system 1A according to the second embodiment. Further, the cutoff system 1B according to the third embodiment may include three current sensors 40 similarly to the cutoff system 1A according to the second embodiment.
- FIG. 6 is a diagram showing a schematic configuration of a shutoff system 1C according to the fourth embodiment.
- the interruption system 1C according to the fourth embodiment differs from the interruption system 1A according to the second embodiment mainly in the arrangement of the plurality of current sensors 40.
- description of the points common to the shutoff system 1A according to the second embodiment will be omitted.
- the first current sensor 41 and the second current sensor 42 are both magnetic sensors that can detect magnetic flux in one axis, similar to the current sensor 40 in the first embodiment. Specifically, both the first current sensor 41 and the second current sensor 42 can detect magnetic flux along an axis along the width direction of the wide surface 11 of the bus bar 10 .
- the substrate 30 is arranged such that its mounting surface is parallel to a direction perpendicular to the wide surface 11 of the bus bar 10 and that the bus bar 10 passes through it.
- the first current sensor 41 and the second current sensor 42 are arranged to sandwich the bus bar 10 in a direction perpendicular to the wide surface 11 of the bus bar 10.
- the first current sensor 41 is arranged above the bus bar 10 and the second current sensor 42 is arranged below the bus bar 10.
- the first current sensor 41 and the second current sensor 42 are arranged in a direction perpendicular to the wide surface 11 of the bus bar 10 .
- the magnetic flux generated by flowing through the bus bar 10 and passing through the first current sensor 41 and the magnetic flux generated by flowing through the bus bar 10 and passing through the second current sensor 42 are as follows. They are almost the same size, but their orientations are different. In the following, these magnetic fluxes will be referred to as "magnetic flux ⁇ 4".
- FIG. 7 is a schematic diagram of the first current sensor 41, the second current sensor 42, and the bus bar 10 according to the fourth embodiment, viewed from the right.
- illustration of the cutoff device 20, the board 30, the control circuit 50, and the ignition circuit 60 is omitted.
- the magnetic flux of these external noises will be referred to as "magnetic flux ⁇ N3.”
- the first current sensor 41 and the second current sensor 42 are the same type of sensors, and the polarity of the current measurement value is also the same. That is, in the fourth embodiment, the first current sensor 41 and the second current sensor 42 are arranged without being rotated by 180 degrees with respect to each other in a plane orthogonal to the wide surface 11 of the bus bar 10.
- the control circuit 50 calculates the difference between the measured value of the first current sensor 41 and the measured value of the second current sensor 42, and divides the calculated difference by 2, thereby controlling the bus bar 10.
- the current value of the flowing current Ib is calculated. That is, in the fourth embodiment, as in the second and third embodiments, at least part of the external noise is removed (i.e., , noise canceling), thereby suppressing a decrease in measurement accuracy of the current Ib flowing through the bus bar 10.
- the wide surface of the bus bar 10 of the external noise is The magnetic flux along the width direction of 11 can be canceled. That is, in the cutoff system 1C according to the fourth embodiment, at least a part of the external noise is removed by referring to the measured values of the first current sensor 41 and the second current sensor 42 that can be detected in one axis. This has the advantage that it is possible to suppress a decrease in measurement accuracy of the current Ib flowing through the bus bar 10.
- control circuit 50 may further have a function of detecting a failure of the current sensor 40, similarly to the shutoff system 1A according to the second embodiment.
- the cutoff system 1C according to the fourth embodiment may include three current sensors 40 similarly to the cutoff system 1A according to the second embodiment.
- FIG. 8 is a diagram showing a schematic configuration of a shutoff system 1D according to the fifth embodiment.
- solid arrows represent magnetic flux generated by the current Ib flowing through the bus bar 10
- wide dashed arrows represent magnetic flux as external noise. Note that in FIG. 8, illustration of the shutoff device 20 is omitted.
- the shutoff system 1D according to the fifth embodiment differs from the shutoff system 1C according to the fourth embodiment mainly in that it includes two substrates 30 and 31.
- description of the points common to the shutoff system 1C according to the fourth embodiment will be omitted.
- One of the two substrates 30 and 31 is placed above the bus bar 10, and the other substrate 31 is placed below the bus bar 10, as in the first embodiment.
- the substrates 30 and 31 are both arranged so that their mounting surfaces are parallel to the wide surface 11 of the bus bar 10.
- the first current sensor 41 is arranged on one substrate 30, and the second current sensor 42 is arranged on the other substrate 31.
- One substrate 30 and the other substrate 31 are mechanically and electrically connected by a connector 70.
- the first current sensor 41 and the second current sensor 42 are both arranged so that the thickness direction coincides with the direction perpendicular to the wide surface 11.
- the first current sensor 41 and the second current sensor 42 are arranged such that the mounting surfaces of the respective substrates 30 and 31 are parallel to the wide surface 11 of the bus bar 10. Therefore, in the fifth embodiment, the magnetic flux passing through each of the first current sensor 41 and the second current sensor 42 is larger than that in the fourth embodiment, so that the measurement accuracy of the current Ib flowing through the bus bar 10 is reduced.
- the advantage is that it can be improved.
- the shutoff systems 1, 1A, 1B, 1C, and 1D of the present disclosure include the bus bar 10, the shutoff device 20, the current sensor 40, and the control circuit 50.
- Bus bar 10 is inserted into power supply path PL.
- the cutoff device 20 cuts off the power supply path PL when a part of the bus bar 10 is cut off.
- Current sensor 40 measures the current flowing through bus bar 10 .
- the control circuit 50 controls the driving of the interrupting device 20 based on the measured value of the current sensor 40.
- the current sensor 40 is a non-contact type current sensor, and is arranged at a distance from the bus bar 10.
- the current Ib flowing through the bus bar 10 does not flow through the current sensor 40, so even in applications where a large current flows through the power supply path PL, no large current flows through the current sensor 40, and the current Excessive heat is not generated in the sensor 40. Therefore, there is an advantage that generation of heat caused by the current Ib flowing through the bus bar 10 can be suppressed.
- the current sensor 40 is arranged so as to face the wide surface 11 of the bus bar 10.
- the current sensor 40 is arranged so as to fit inside the wide surface 11 when viewed from a direction perpendicular to the wide surface 11. That is, it is preferable that the current sensor 40 is arranged such that the entire current sensor overlaps the wide surface 11 when viewed from a direction orthogonal to the wide surface 11.
- first current sensor 41 and the second current sensor 42 are located on the same side with respect to the wide surface 11 of the bus bar 10, and face the wide surface 11, and each of the first current sensor 41 and the second current sensor 42 can detect magnetic flux along two axes: an axis along the width direction of the wide surface 11 and an axis along a direction perpendicular to the wide surface 11, and the first current sensor 41 and the second current sensor 42 , it is preferable that the polarities of the measured current values are different from each other.
- first current sensor 41 and the second current sensor 42 are arranged on the same surface parallel to the wide surface 11, and on the same surface, the first current sensor 41 is 180 degrees above the second current sensor. It is preferable that they be rotated by a degree.
- first current sensor 41 and the second current sensor 42 are located on the same side with respect to the wide surface 11 of the bus bar 10, and the first current sensor 41 is arranged to face the wide surface 11 of the bus bar 10. Therefore, it is preferable that the second current sensor 42 is disposed further away from the bus bar 10 than the first current sensor 41 is.
- first current sensor 41 and the second current sensor 42 are arranged on the same plane perpendicular to the direction in which the bus bar 10 extends, and the bus bar 10 extends between the first current sensor 41 and the second current sensor 42. Then it is preferable.
- first current sensor 41 and the second current sensor 42 are both arranged so that the thickness direction thereof coincides with the direction orthogonal to the wide surface 11.
- the current sensor 40 may be a coreless magnetic sensor.
- the current sensor 40 does not require a magnetic core, so there is no measurement error due to magnetic hysteresis, and the measurement accuracy of the current Ib flowing through the bus bar 10 is improved compared to a current sensor using a magnetic core. It has the advantage of being expensive.
- the current sensor 40 may be a magnetic sensor using a tunnel magnetoresistive element.
- the sensitivity to magnetism is higher than when the current sensor 40 is a magnetic sensor using, for example, a GMR (Giant Magnetoresistance) element, so the measurement accuracy of the current Ib flowing through the bus bar 10 is improved.
- GMR Gate Magnetoresistance
- the current sensor 40 does not need to be arranged to face the wide surface 11 of the bus bar 10. That is, the current sensor 40 may be arranged to face the side surface of the bus bar 10. Even in this case, it is possible to measure the current Ib flowing through the bus bar 10 as long as the current sensor 40 is arranged so that the magnetic flux ⁇ 0 generated by the current Ib flowing through the bus bar 10 passes through.
- the first current sensor 41 and the second current sensor 42 may be realized by different types of current sensors whose current measurement values have different polarities.
- control circuit 50 and the ignition circuit 60 may be configured integrally.
- control circuit 50 may have a function as the ignition circuit 60.
- the current sensor 40 is a current sensor using an AMR (Anisotropic Magnetoresistance) element or a GMR (Giant Magnetoresistance) element as a magnetoresistive element. It's okay.
- the shutoff system is installed, for example, in a vehicle such as a car, or an electrical product such as a home appliance.
- Vehicles include, for example, vehicles equipped with batteries such as BEVs (Battery Electric Vehicles) and PHEVs (Plug-in Hybrid Vehicles).
- BEVs Battery Electric Vehicles
- PHEVs Plug-in Hybrid Vehicles
- the cutoff system may be mounted on an object having an electric circuit other than a vehicle or an electric product.
- the cutoff system in each of the above embodiments may be used, for example, to cut off overcurrent in a power storage system, a power transmission system, or the like.
- the present disclosure is useful for a shutoff system that shuts off a power supply path when an overcurrent occurs.
- Cutoff system 10 Bus bar 11 Wide surface 20 Cutoff device 21 Case 22 Ignition part 30, 31 Board 40 Current sensor 41 First current sensor 42 Second current sensor 50 Control circuit 60 Ignition circuit 70 Connector ⁇ 1 , ⁇ 2, ⁇ 3, ⁇ 4, ⁇ N1, ⁇ N2, ⁇ N3 Magnetic flux Ib Current PL Power supply path
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Measuring Instrument Details And Bridges, And Automatic Balancing Devices (AREA)
Abstract
遮断システムは、バスバーと、遮断装置と、電流センサと、制御回路と、を備える。バスバーは、電力供給経路に挿入される。遮断装置は、バスバーの一部が分断されると、電力供給経路が遮断される。電流センサは、バスバーを流れる電流を測定する。制御回路は、電流センサの測定値に基づいて遮断装置の駆動を制御する。電流センサは、非接触型の電流センサであり、バスバーとの間に間隔を空けて配置される。
Description
本開示は、電力供給経路を遮断する遮断システムに関する。
特許文献1には、パイロヒューズ(Pyro-Fuse)制御回路が開示されている。このパイロヒューズ制御回路は、導体に流れる電流が閾値電流を超えるかを判定するように構成される電流感知回路を備えている。そして、この電流感知回路は、導体に配置されるシャント抵抗器に印加される電圧を測定するように構成されている。つまり、電流感知回路は、シャント抵抗器を介して導体に流れる電流を測定し、導体に流れる電流が閾値を超えているか否かを判定する。
しかしながら、特許文献1に開示のパイロヒューズ制御回路では、導体(バスバー)に流れる電流がシャント抵抗器に流れるため、電流が流れることでシャント抵抗器にて熱が発生する。そして、バスバーに流れる電流が大電流である場合、シャント抵抗器にて発生する熱も大きくなるため、発生した熱を冷却するための構造が必要となり、コストが嵩んでしまう、という課題がある。
そこで、本開示は、バスバーに電流が流れることに起因する熱の発生を抑制することができる遮断システムを提供する。
本開示の一態様に係る遮断システムは、バスバーと、遮断装置と、第1電流センサと、制御回路と、を備える。前記バスバーは、電力供給経路に挿入される。前記遮断装置は、前記バスバーの一部が分断されると、前記電力供給経路が遮断される。前記第1電流センサは、前記バスバーを流れる電流を測定する。前記制御回路は、前記第1電流センサの測定値に基づいて前記遮断装置の駆動を制御する。前記第1電流センサは、非接触型の電流センサであり、前記バスバーと間隔を空けて配置される。
本開示の遮断システムによれば、バスバーに電流が流れることに起因する熱の発生を抑制することができる、という利点がある。
以下、実施の形態について、図面を参照しながら具体的に説明する。
なお、以下で説明する実施の形態は、いずれも包括的又は具体的な例を示すものである。以下の実施の形態で示される数値、形状、構成要素、構成要素の配置位置及び接続形態等は、一例であり、本開示を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
また、各図は、模式図であり、必ずしも厳密に図示されたものではない。したがって、例えば、各図において縮尺等は必ずしも一致しない。また、各図において、他の図と実質的に同一の構成については同一の符号を付しており、重複する説明は省略又は簡略化する。
また、本明細書において、直交、平行、同じ等の要素間の関係性を示す用語、及び、矩形、円形等の要素の形状を示す用語、並びに、数値、及び、数値範囲は、厳格な意味のみを表す表現ではなく、実質的に同等な範囲、例えば数%程度(例えば、10%程度)の差異をも含むことを意味する表現である。
(実施の形態1)
以下、実施の形態1に係る遮断システムについて説明する。遮断システムは、例えば自動車等の車両に搭載され、バッテリーから負荷へ電力を供給するための電力供給経路に設けられている。そして、遮断システムは、電力供給経路に異常が発生した場合に、電力の供給を遮断するシステムである。
以下、実施の形態1に係る遮断システムについて説明する。遮断システムは、例えば自動車等の車両に搭載され、バッテリーから負荷へ電力を供給するための電力供給経路に設けられている。そして、遮断システムは、電力供給経路に異常が発生した場合に、電力の供給を遮断するシステムである。
バッテリーは、例えばリチウムイオン電池等の二次電池である。負荷は、例えばモータ等の電気機器である。バッテリーは、放電することにより、電力供給経路を介して負荷へ直流電力を供給する。また、バッテリーは、電力供給経路を介して負荷から直流電力を受けることで、充電する。
[構成]
以下、実施の形態1に係る遮断システム1の構成について図1を用いて説明する。図1は、実施の形態1に係る遮断システム1の概略構成を示す図である。図1に示すように、遮断システム1は、バスバー10と、遮断装置20と、基板30と、電流センサ40と、制御回路50と、点火回路60と、を備えている。
以下、実施の形態1に係る遮断システム1の構成について図1を用いて説明する。図1は、実施の形態1に係る遮断システム1の概略構成を示す図である。図1に示すように、遮断システム1は、バスバー10と、遮断装置20と、基板30と、電流センサ40と、制御回路50と、点火回路60と、を備えている。
バスバー10は、直線状かつ平板状の導体であって、遮断装置20の外郭を構成するケース21を貫通して配置されている。バスバー10の上面(図1において上側の面)及び下面(図1において下側の面)は、左側面(図1において紙面手前側の面)及び右側面(図1において紙面奥側の面)と比較して幅方向の寸法が大きい幅広面となっている。以下では、バスバー10の上面(又は下面)を幅広面11とも言う。図示していないが、バスバー10の長手方向の両端のうち第1端はバッテリーの正極(又は負極)と接続され、第2端は負荷の一端(又は他端)に接続されている。つまり、バスバー10は、バッテリーの正極(又は負極)と負荷の一端(又は他端)とを繋ぐ電力供給経路PLに挿入されている。なお、バスバー10は、遮断装置20の構成要素の一部であってもよい。
遮断装置20は、電力供給経路PLにおける電力の供給を遮断する装置である。実施の形態1では、遮断装置20は、パイロヒューズ(火工式遮断装置、不可逆火工式遮断装置)である。遮断装置20は、点火回路60から出力された遮断信号に基づいて、バスバー10の一部を分断することで、電力供給経路PLを遮断する。具体的には、遮断装置20は、バスバー10のうち遮断装置20の内部に位置する部位を、遮断装置20の内部に収納されているピストンにより分断することで、電力供給経路PLを遮断する。
より具体的には、遮断装置20は、外郭を形成するケース21と、バスバー10の幅広面11と直交する方向(図1における上下方向)に移動可能なピストンと、ピストンを作動させる点火部22と、を備えている。なお、図1では、ピストンの図示を省略している。
ケース21は、バスバー10の幅広面11と直交する方向に長い筒状である。ケース21には、バスバー10が貫通して配置されている。また、ケース21の内部には、バスバー10の分断される部位、ピストン、及び点火部22が配置されている。なお、図1では、ケース21は直方体状であるが、実際の形状を表しているわけではない。
点火部22は、主としてケース21の内部に設けられている。点火部22の一部は、点火回路60からの遮断信号を受け付ける入力端子としてケース21の外部に露出している。点火部22は、点火回路60からの遮断信号を受け付けた場合、つまり電力供給経路PLに異常が発生した場合に、ピストンを作動させる。ここでいう電力供給経路PLの異常の発生は、例えば短絡等により電力供給経路PL、言い換えればバスバー10に過電流が流れることである。
具体的には、点火部22は、点火回路60からの遮断信号を受け付けると、火薬を点火してケース21内のガスを急激に膨張させることで、ピストンをケース21内に位置するバスバー10の一部に向けて高速で移動させる。これにより、ピストンがバスバー10の一部に衝突し、バスバー10の一部が分断されることで、電力供給経路PLが遮断される。
基板30は、矩形状かつ平板状であって、電気絶縁性を有する材料により形成されている。基板30は、バスバー10の上方に配置されている。基板30の上面には、電流センサ40と、制御回路50と、点火回路60とが実装されることで配置されている。電流センサ40は、電気絶縁性を有する基板30を間に挟んでバスバー10の上方に配置されているため、バスバー10と所定の間隔を空けて配置され、かつ、バスバー10と電気的に絶縁されている。つまり、電流センサ40は、バスバー10と接触しないように配置されている。なお、基板30は、バスバー10の上面に配置されてもよいし、遮断システム1の周囲にある他の部材に固定される等して、バスバー10と接触しないように配置されていてもよい。
電流センサ40は、バスバー10を流れる電流Ibを測定するセンサであって、バスバー10との間に間隔を空けて配置される非接触型の電流センサである。実施の形態1では、電流センサ40は、特にコアレス型の磁気センサであり、更には、磁気抵抗素子としてTMR(Tunnel Magnetoresistance:トンネル磁気抵抗)素子を用いた電流センサである。磁気抵抗素子(ここでは、TMR素子)は、電流センサ40を通過する磁束の大きさに応じて磁気抵抗が変化する。
実施の形態1では、電流センサ40は、磁気抵抗素子と、信号処理回路とを内蔵したIC(Integrated Circuit)により構成されている。信号処理回路は、磁気抵抗素子に電流を流すことで生じる電位差を増幅し、増幅した電位差を処理することにより、電流センサ40を通過する磁束の大きさに応じた信号を出力する。なお、磁気抵抗素子に流れる電流は、電流センサ40を駆動するための電源から流れる電流であって、バスバー10に流れる電流Ibではない。また、磁気抵抗素子に流れる電流は、バスバー10に流れる電流と比較して非常に小さい電流である。
ここで、電流センサ40を通過する磁束は、バスバー10に流れる電流Ibの大きさに応じて変化する。このため、電流センサ40は、磁気抵抗素子の磁気抵抗の大きさ、言い換えれば磁束の大きさに基づいて、バスバー10に流れる電流Ibを、バスバー10に接触することなく測定することが可能である。
実施の形態1では、電流センサ40は、電流センサ40を通過する磁束を1軸で検知可能な磁気センサである。具体的には、電流センサ40は、バスバー10の幅広面11の幅方向に沿った1軸で磁束を検知可能である。
電流センサ40は、基板30に実装されることにより、図1に示すように、バスバー10の幅広面11と対向するように配置されている。特に、実施の形態1では、電流センサ40は、図2に示すように、平面視で(つまり、バスバー10の幅広面11と直交する方向から見て)、バスバー10の幅広面11の内側に収まるように配置されている。つまり、バスバー10の幅広面11と直交する方向から見て(上から見て)、電流センサ40の全てが、バスバー10の幅広面11と重なっている。図2は、実施の形態1に係る電流センサ40及びバスバー10を上から見た概略図である。なお、図2では、遮断装置20、基板30、制御回路50、及び点火回路60の図示を省略している。
このように電流センサ40をバスバー10に対して配置することの利点について、図3を用いて説明する。図3は、実施の形態1に係る電流センサ40及びバスバー10を図1における右から見た概略図である。なお、図3では、遮断装置20、基板30、制御回路50、及び点火回路60の図示を省略している。
図3に示すように、バスバー10に電流Ibが流れると、バスバー10の周囲に磁場が生じる。この磁場の向きは、バスバー10に図1における左から右へ向かう電流Ibが流れた場合、バスバー10を右から見た際に反時計回りとなる。このため、バスバー10の上方(又は下方)に配置された電流センサ40を、バスバー10に電流Ibが流れることで発生する磁束φ0が通過することになる。
ここで、バスバー10の幅広面11の内側と対向する空間においては、図3に示すように、磁束φ0の向きは殆ど変化しない。つまり、当該空間は、バスバー10に電流Ibが流れることで発生する磁束φ0の変化が比較的小さい場所である。このため、当該空間に電流センサ40を配置すれば、仮に設計時に電流センサ40の位置ずれが生じたとしても、電流センサ40を通過する磁束φ0は殆ど変化しないため、電流センサ40の位置ずれが電流センサ40の測定精度に影響を及ぼしにくい、という利点がある。
制御回路50は、電流センサ40の測定値に基づいて遮断装置20の駆動を制御する回路である。制御回路50は、例えばICにより構成されている。また、制御回路50は、電流センサ40と電気的に接続されており、電流センサ40の測定値を取得するように構成されている。実施の形態1では、制御回路50は、電流センサ40の測定値、つまりバスバー10に流れる電流Ibの電流値と、予めメモリ等に記憶してある閾値とを比較し、電流値が閾値を上回ると、点火回路60に対して電気信号を出力する。この電気信号は、点火回路60にて増幅され、増幅された電気信号が遮断信号として遮断装置20の点火部22へ入力される。これにより、遮断装置20の点火部22がピストンを作動させる。
このように、制御回路50は、電流センサ40の測定値を参照することで、バスバー10に過電流が流れているか否か、つまり電力供給経路PLに異常が発生しているか否かを監視する。そして、制御回路50は、バスバー10に過電流が流れている場合に、点火回路60を介して遮断信号を遮断装置20の点火部22に出力することにより、遮断装置20を駆動させてバスバー10の一部を分断させ、電力供給経路PLを遮断させる。
なお、制御回路50は、例えば車両に搭載されたECU(Electronic Control Unit)と通信可能に接続されている場合、ECUから出力された異常の発生を通知する信号を受信することをトリガとして、電気信号を点火回路60へ出力してもよい。
点火回路60は、制御回路50から出力される電気信号を増幅し、増幅した電気信号(つまり、遮断信号)を遮断装置20の点火部22に出力する回路である。点火回路60は、例えばICにより構成されている。点火回路60は、点火部22が備える火薬を発火することが可能な大きさまで、制御回路50から出力される電気信号を増幅する。
[利点等]
以下、実施の形態1に係る遮断システム1の利点について説明する。上述のように、実施の形態1に係る遮断システム1では、電流センサ40は、バスバー10との間に間隔を空けて配置される非接触型の電流センサである。このため、電流センサ40にはバスバー10に流れる電流Ibが流れないので、電力供給経路PLに大電流が流れる用途であっても、電流センサ40に大電流が流れることがなく、電流センサ40で過大な熱が発生することがない。このため、実施の形態1に係る遮断システム1では、バスバー10に電流Ibが流れることに起因する熱の発生を抑制することができる、という利点がある。したがって、実施の形態1に係る遮断システム1では、電流センサ40で発生した熱を冷却するための構造が不要であるため、遮断システム1の製造コストを低減することができる。
以下、実施の形態1に係る遮断システム1の利点について説明する。上述のように、実施の形態1に係る遮断システム1では、電流センサ40は、バスバー10との間に間隔を空けて配置される非接触型の電流センサである。このため、電流センサ40にはバスバー10に流れる電流Ibが流れないので、電力供給経路PLに大電流が流れる用途であっても、電流センサ40に大電流が流れることがなく、電流センサ40で過大な熱が発生することがない。このため、実施の形態1に係る遮断システム1では、バスバー10に電流Ibが流れることに起因する熱の発生を抑制することができる、という利点がある。したがって、実施の形態1に係る遮断システム1では、電流センサ40で発生した熱を冷却するための構造が不要であるため、遮断システム1の製造コストを低減することができる。
また、実施の形態1に係る遮断システム1では、電流センサ40は、コアレス型の電流センサである。このため、電流センサ40は、磁気コアを必要としないため、磁気ヒステリシスによる測定誤差も存在せず、磁気コアを用いた電流センサと比較してバスバー10に流れる電流Ibの測定精度が高い、という利点がある。
(実施の形態2)
以下、実施の形態2に係る遮断システム1Aについて図4を用いて説明する。図4は、実施の形態2に係る遮断システム1Aの概略構成を示す図である。実施の形態2に係る遮断システム1Aは、主として電流センサ40を複数備えている点で、実施の形態1に係る遮断システム1と相違する。以下、実施の形態1に係る遮断システム1と共通する点については説明を省略する。
以下、実施の形態2に係る遮断システム1Aについて図4を用いて説明する。図4は、実施の形態2に係る遮断システム1Aの概略構成を示す図である。実施の形態2に係る遮断システム1Aは、主として電流センサ40を複数備えている点で、実施の形態1に係る遮断システム1と相違する。以下、実施の形態1に係る遮断システム1と共通する点については説明を省略する。
遮断システム1Aは、図4に示すように、複数(ここでは、2つ)の電流センサ40を備えている。以下では、2つの電流センサ40のうちの一方の電流センサ40を第1電流センサ41、他方の電流センサ40を第2電流センサ42とも言う。
第1電流センサ41及び第2電流センサ42の各々は、いずれも磁束を2軸で検知可能な磁気センサである。具体的には、第1電流センサ41及び第2電流センサ42は、いずれもバスバー10の幅広面11の幅方向に沿った軸と、バスバー10の幅広面11と直交する方向に沿った軸と、の2軸で磁束を検知可能である。
第1電流センサ41及び第2電流センサ42は、いずれもバスバー10の上面と対向するように配置されている。言い換えれば、複数の電流センサ40は、いずれも幅広面11と対向する同じ側(ここでは、幅広面11の上側)に配置されている。特に、実施の形態2では、第1電流センサ41及び第2電流センサ42は、平面視で(つまり、バスバー10の幅広面11と直交する方向から見て)、バスバー10の幅広面11の内側に収まるように配置されている。
また、第1電流センサ41及び第2電流センサ42は、バスバー10の長手方向に沿って並ぶように配置されている。したがって、バスバー10に電流Ibが流れることで発生して第1電流センサ41を通過する磁束と、バスバー10に電流Ibが流れることで発生して第2電流センサ42を通過する磁束とは、殆ど同じ大きさであり、かつ、同じ向きである。以下では、これらの磁束を「磁束φ1」とする。
ここで、実施の形態2では、第1電流センサ41及び第2電流センサ42は、同じ種類のセンサである。しかしながら、第1電流センサ41及び第2電流センサ42は、バスバー10の幅広面11と平行な面内において互いに180度回転した位置関係となるように配置されている。このため、第1電流センサ41及び第2電流センサ42は、電流の測定値の極性が互いに異なっている。ここでは、同じ磁束に対して、第1電流センサ41は正極性の測定値を出力する一方、第2電流センサ42は負極性の測定値を出力する。
制御回路50は、第1電流センサ41及び第2電流センサ42の各々と電気的に接続されており、第1電流センサ41の測定値と、第2電流センサ42の測定値とを取得するように構成されている。そして、制御回路50は、第1電流センサ41の測定値と、第2電流センサ42の測定値とに基づいて、バスバー10に流れる電流Ibの電流値を算出し、算出した電流値と閾値とを比較することで、バスバー10に過電流が流れているか否かを監視する。
つまり、実施の形態2における制御回路50は、複数の電流センサ40の各々の測定値を用いてバスバー10に流れる電流Ibの電流値を算出する処理を実行する点で、実施の形態1における制御回路50と相違する。具体的には、制御回路50は、第1電流センサ41の測定値と、第2電流センサ42の測定値との差を算出し、算出した差を2で除算することにより、バスバー10に流れる電流Ibの電流値を算出する。
ここで、遮断システムが搭載されている車両内の空間においては、バスバー10以外の導体、及びリレー等の電気部品が存在しており、これらに電流が流れることで発生する磁束が外来ノイズとして遮断システムに飛来する。このため、電流センサ40に外来ノイズとしての磁束が通過すると、バスバー10に流れる電流Ibの測定精度が低下する可能性がある。
そこで、実施の形態2では、上述のように第1電流センサ41の測定値と第2電流センサ42の測定値とを参照して外来ノイズの少なくとも一部を除去(つまり、ノイズキャンセリング)することで、バスバー10に流れる電流Ibの測定精度の低下を抑制している。
以下、制御回路50によるノイズキャンセリングの過程について数式を用いて説明する。第1電流センサ41の測定値を「I1」、第2電流センサ42の測定値を「I2」とすると、第1電流センサ41の測定値及び第2電流センサ42の測定値は、それぞれ以下の数式(1)、(2)で表される。
I1=f(φ1)+f(φN1)・・・(1)
I2=f(-φ1)+f(φN1)=-f(φ1)+f(φN1)・・・(2)
数式(1)、(2)において、「f(φ1)」は第1電流センサ41を通過する磁束φ1に対応する電流値を表しており、「f(-φ1)」は第2電流センサ42を通過する磁束φ1に対応する電流値を表している。上述のように、第1電流センサ41及び第2電流センサ42は互いに異なる極性の電流値を出力するため、「f(-φ1)」は「-f(φ1)」に相当する。
I2=f(-φ1)+f(φN1)=-f(φ1)+f(φN1)・・・(2)
数式(1)、(2)において、「f(φ1)」は第1電流センサ41を通過する磁束φ1に対応する電流値を表しており、「f(-φ1)」は第2電流センサ42を通過する磁束φ1に対応する電流値を表している。上述のように、第1電流センサ41及び第2電流センサ42は互いに異なる極性の電流値を出力するため、「f(-φ1)」は「-f(φ1)」に相当する。
また、数式(1)、(2)において、「f(φN1)」は第1電流センサ41及び第2電流センサ42の各々を通過する磁束φN1に対応する電流値を表している。ここで、磁束φN1は、外来ノイズのうちのバスバー10の幅広面11と直交する方向に沿った磁束である。
そして、バスバー10に流れる電流Ibの電流値を「Ib」とすると、電流値「Ib」は以下の数式(3)で表される。
Ib=(I1-I2)/2=f(φ1)・・・(3)
上述のように、第1電流センサ41の測定値と第2電流センサ42の測定値との差を算出し、算出した差を2で除算することにより、外来ノイズのうちのバスバー10の幅広面11と直交する方向に沿った磁束をキャンセルすることができる。つまり、実施の形態2に係る遮断システム1Aでは、2軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
上述のように、第1電流センサ41の測定値と第2電流センサ42の測定値との差を算出し、算出した差を2で除算することにより、外来ノイズのうちのバスバー10の幅広面11と直交する方向に沿った磁束をキャンセルすることができる。つまり、実施の形態2に係る遮断システム1Aでは、2軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
ところで、実施の形態2に係る遮断システム1Aでは、制御回路50は、電流センサ40の故障を検知する機能を更に有していてもよい。具体的には、制御回路50は、第1電流センサ41の測定値と、第2電流センサ42の測定値との差分を算出し、算出した差分が予めメモリ等に記憶している所定の閾値範囲内に収まるか否かを監視する。そして、制御回路50は、算出した差分が所定の閾値範囲を逸脱した場合に、第1電流センサ41及び第2電流センサ42のいずれか一方の電流センサが故障したことを検知する。この場合、例えば制御回路50から使用者に異常の通知を行い、第1電流センサ41および第2電流センサ42を新品に交換する等して、バスバー10に流れる電流Ibを精度良く測定できない状況の改善を図ることが可能である。
また、実施の形態2に係る遮断システム1Aは、3つの電流センサ40を備えていてもよい。この場合、制御回路50は、電流センサ40の故障を検知する機能を有している場合、どの電流センサ40が故障しているかを特定することが可能である。例えば、制御回路50は、3つの電流センサ40のうちの2つの電流センサ40を選択し、選択した2つの電流センサ40の各々の測定値の差分を算出し、算出した差分が所定の閾値範囲内に収まるか否かを監視する。3つの電流センサ40から2つの電流センサ40を選択する組み合わせは6通り存在するので、制御回路50は、6通りの各々について、算出した差分が所定の閾値範囲内に収まるか否かを監視する。
ここで、3つの電流センサ40のうちの1つの電流センサ40が故障した場合、上記6通りのうちの故障した電流センサ40を含む2通りの各々において、算出した差分が所定の閾値範囲を逸脱するため、制御回路50は、故障した電流センサ40を特定することが可能である。この場合、故障した電流センサ40のみを新品に交換すれば、バスバー10に流れる電流Ibを精度良く測定できない状況の改善を図ることが可能である。
(実施の形態3)
以下、実施の形態3に係る遮断システム1Bについて図5を用いて説明する。図5は、実施の形態3に係る遮断システム1Bの概略構成を示す図である。実施の形態3に係る遮断システム1Bは、主として複数の電流センサ40の配置が実施の形態2に係る遮断システム1Aと相違する。以下、実施の形態2に係る遮断システム1Aと共通する点については説明を省略する。
以下、実施の形態3に係る遮断システム1Bについて図5を用いて説明する。図5は、実施の形態3に係る遮断システム1Bの概略構成を示す図である。実施の形態3に係る遮断システム1Bは、主として複数の電流センサ40の配置が実施の形態2に係る遮断システム1Aと相違する。以下、実施の形態2に係る遮断システム1Aと共通する点については説明を省略する。
実施の形態3では、第1電流センサ41及び第2電流センサ42は、実施の形態1における電流センサ40と同様に、いずれも磁束を1軸で検知可能な磁気センサである。具体的には、第1電流センサ41及び第2電流センサ42は、いずれもバスバー10の幅広面11の幅方向に沿った軸で磁束を検知可能である。
第1電流センサ41及び第2電流センサ42は、いずれもバスバー10の上面と対向するように配置されている。言い換えれば、複数の電流センサ40は、いずれも幅広面11と対向する同じ側(ここでは、幅広面11の上側)に配置されている。特に、第1電流センサ41は、平面視で(つまり、バスバー10の幅広面11と直交する方向から見て)、バスバー10の幅広面11の内側に収まるように配置されている。
一方、第2電流センサ42は、バスバー10から所定の距離を空けて配置されている。具体的には、第2電流センサ42は、第1電流センサ41と共にバスバー10の幅広面11の幅方向に沿って並ぶように配置され、かつ、磁束φ3が磁束φ2よりも非常に小さくなるように配置されている。ここで、磁束φ2は、バスバー10に電流Ibが流れることで発生して第1電流センサ41を通過する磁束である。また、磁束φ3は、バスバー10に電流Ibが流れることで発生して第2電流センサ42を通過する磁束であり、磁束φ2と同じ向きである。例えば、磁束φ3は、磁束φ2の10分の1程度である。また、外来ノイズのうち第1電流センサ41を通過する磁束と、外来ノイズのうち第2電流センサ42を通過する磁束とは、殆ど同じ大きさであり、かつ、同じ向きである。以下では、これらの外来ノイズの磁束を「磁束φN2」とする。
ここで、実施の形態3では、第1電流センサ41及び第2電流センサ42は、同じ種類のセンサであり、電流の測定値の極性も同じである。つまり、実施の形態3では、第1電流センサ41及び第2電流センサ42は、バスバー10の幅広面11と平行な面内において互いに180度回転せずに配置されている。
実施の形態3では、制御回路50は、第1電流センサ41の測定値と、第2電流センサ42の測定値との差を算出することにより、バスバー10に流れる電流Ibの電流値を算出する。すなわち、実施の形態3では、実施の形態2と同様に、第1電流センサ41の測定値と第2電流センサ42の測定値とを参照して外来ノイズの少なくとも一部を除去(つまり、ノイズキャンセリング)することで、バスバー10に流れる電流Ibの測定精度の低下を抑制している。
以下、制御回路50によるノイズキャンセリングの過程について数式を用いて説明する。第1電流センサ41の測定値を「I1」、第2電流センサ42の測定値を「I2」とすると、第1電流センサ41の測定値及び第2電流センサ42の測定値は、それぞれ以下の数式(4)、(5)で表される。
I1=f(φ2)+f(φN2)・・・(4)
I2=f(φ3)+f(φN2)・・・(5)
数式(4)において、「f(φ2)」は第1電流センサ41を通過する磁束φ2に対応する電流値を表している。また、数式(5)において、「f(φ3)」は第2電流センサ42を通過する磁束φ3に対応する電流値を表している。また、数式(4)、(5)において、「f(φN2)」は第1電流センサ41及び第2電流センサ42の各々を通過する磁束φN2に対応する電流値を表している。ここで、磁束φN2は、外来ノイズのうちのバスバー10の幅広面11の幅方向に沿った磁束である。
I2=f(φ3)+f(φN2)・・・(5)
数式(4)において、「f(φ2)」は第1電流センサ41を通過する磁束φ2に対応する電流値を表している。また、数式(5)において、「f(φ3)」は第2電流センサ42を通過する磁束φ3に対応する電流値を表している。また、数式(4)、(5)において、「f(φN2)」は第1電流センサ41及び第2電流センサ42の各々を通過する磁束φN2に対応する電流値を表している。ここで、磁束φN2は、外来ノイズのうちのバスバー10の幅広面11の幅方向に沿った磁束である。
そして、バスバー10に流れる電流Ibの電流値を「Ib」とすると、電流値「Ib」は以下の数式(6)で表される。なお、数式(6)において、磁束φ3が磁束φ2よりも非常に小さいことから、「f(φ2)>>f(φ3)」となり、「f(φ3)」を無視している。
Ib=(I1-I2)=f(φ2)-f(φ3)≒f(φ2)・・・(6)
上述のように、第1電流センサ41の測定値と第2電流センサ42の測定値との差を算出することにより、外来ノイズのうちのバスバー10の幅広面11の幅方向に沿った磁束をキャンセルすることができる。つまり、実施の形態3に係る遮断システム1Bでは、1軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
上述のように、第1電流センサ41の測定値と第2電流センサ42の測定値との差を算出することにより、外来ノイズのうちのバスバー10の幅広面11の幅方向に沿った磁束をキャンセルすることができる。つまり、実施の形態3に係る遮断システム1Bでは、1軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
なお、実施の形態3に係る遮断システム1Bでは、実施の形態2に係る遮断システム1Aと同様に、制御回路50は、電流センサ40の故障を検知する機能を更に有していてもよい。また、実施の形態3に係る遮断システム1Bは、実施の形態2に係る遮断システム1Aと同様に、3つの電流センサ40を備えていてもよい。
(実施の形態4)
以下、実施の形態4に係る遮断システム1Cについて図6を用いて説明する。図6は、実施の形態4に係る遮断システム1Cの概略構成を示す図である。実施の形態4に係る遮断システム1Cは、主として複数の電流センサ40の配置が実施の形態2に係る遮断システム1Aと相違する。以下、実施の形態2に係る遮断システム1Aと共通する点については説明を省略する。
以下、実施の形態4に係る遮断システム1Cについて図6を用いて説明する。図6は、実施の形態4に係る遮断システム1Cの概略構成を示す図である。実施の形態4に係る遮断システム1Cは、主として複数の電流センサ40の配置が実施の形態2に係る遮断システム1Aと相違する。以下、実施の形態2に係る遮断システム1Aと共通する点については説明を省略する。
実施の形態4では、第1電流センサ41及び第2電流センサ42は、実施の形態1における電流センサ40と同様に、いずれも磁束を1軸で検知可能な磁気センサである。具体的には、第1電流センサ41及び第2電流センサ42は、いずれもバスバー10の幅広面11の幅方向に沿った軸で磁束を検知可能である。
実施の形態4では、基板30は、実装面がバスバー10の幅広面11と直交する方向と平行し、かつ、バスバー10が貫通する形で配置されている。そして、第1電流センサ41及び第2電流センサ42は、バスバー10の幅広面11と直交する方向においてバスバー10を挟んで配置されている。具体的には、第1電流センサ41は、バスバー10の上方に配置され、第2電流センサ42は、バスバー10の下方に配置されている。そして、第1電流センサ41及び第2電流センサ42は、バスバー10の幅広面11と直交する方向に並ぶように配置されている。このため、実施の形態4では、バスバー10に流れることで発生して第1電流センサ41を通過する磁束と、バスバー10に流れることで発生して第2電流センサ42を通過する磁束とは、殆ど同じ大きさであるが、互いに向きが異なっている。以下では、これらの磁束を「磁束φ4」とする。
ここで、図7に示すように、外来ノイズのうち第1電流センサ41を通過する磁束と、外来ノイズのうち第2電流センサ42を通過する磁束とは、殆ど同じ大きさであり、かつ、同じ向きである。図7は、実施の形態4に係る第1電流センサ41、第2電流センサ42、及びバスバー10を右から見た概略図である。なお、図7では、遮断装置20、基板30、制御回路50、及び点火回路60の図示を省略している。以下では、これら外来ノイズの磁束を「磁束φN3」とする。
ここで、実施の形態4では、第1電流センサ41及び第2電流センサ42は、同じ種類のセンサであり、電流の測定値の極性も同じである。つまり、実施の形態4では、第1電流センサ41及び第2電流センサ42は、バスバー10の幅広面11と直交する面内において互いに180度回転せずに配置されている。
実施の形態4では、制御回路50は、第1電流センサ41の測定値と、第2電流センサ42の測定値との差を算出し、算出した差を2で除算することにより、バスバー10に流れる電流Ibの電流値を算出する。すなわち、実施の形態4では、実施の形態2,3と同様に、第1電流センサ41の測定値と第2電流センサ42の測定値とを参照して外来ノイズの少なくとも一部を除去(つまり、ノイズキャンセリング)することで、バスバー10に流れる電流Ibの測定精度の低下を抑制している。
以下、制御回路50によるノイズキャンセリングの過程について数式を用いて説明する。第1電流センサ41の測定値を「I1」、第2電流センサ42の測定値を「I2」とすると、第1電流センサ41の測定値及び第2電流センサ42の測定値は、それぞれ以下の数式(7)、(8)で表される。
I1=f(φ4)+f(φN3)・・・(7)
I2=f(-φ4)+f(φN3)=-f(φ4)+f(φN3)・・・(8)
そして、バスバー10に流れる電流Ibの電流値を「Ib」とすると、電流値「Ib」は以下の数式(9)で表される。
I2=f(-φ4)+f(φN3)=-f(φ4)+f(φN3)・・・(8)
そして、バスバー10に流れる電流Ibの電流値を「Ib」とすると、電流値「Ib」は以下の数式(9)で表される。
Ib=(I1-I2)/2=f(φ4)・・・(9)
上述のように、第1電流センサ41の測定値と第2電流センサ42の測定値との差を算出し、算出した差を2で除算することにより、外来ノイズのうちのバスバー10の幅広面11の幅方向に沿った磁束をキャンセルすることができる。つまり、実施の形態4に係る遮断システム1Cでは、1軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
上述のように、第1電流センサ41の測定値と第2電流センサ42の測定値との差を算出し、算出した差を2で除算することにより、外来ノイズのうちのバスバー10の幅広面11の幅方向に沿った磁束をキャンセルすることができる。つまり、実施の形態4に係る遮断システム1Cでは、1軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
なお、実施の形態4に係る遮断システム1Cでは、実施の形態2に係る遮断システム1Aと同様に、制御回路50は、電流センサ40の故障を検知する機能を更に有していてもよい。また、実施の形態4に係る遮断システム1Cは、実施の形態2に係る遮断システム1Aと同様に、3つの電流センサ40を備えていてもよい。
(実施の形態5)
以下、実施の形態5に係る遮断システム1Dについて図8を用いて説明する。図8は、実施の形態5に係る遮断システム1Dの概略構成を示す図である。図8において、実線の矢印は、バスバー10に電流Ibが流れることで発生する磁束を表しており、幅広の破線の矢印は、外来ノイズとしての磁束を表している。なお、図8では、遮断装置20の図示を省略している。実施の形態5に係る遮断システム1Dは、主として2枚の基板30、31を備える点で実施の形態4に係る遮断システム1Cと相違する。以下、実施の形態4に係る遮断システム1Cと共通する点については説明を省略する。
以下、実施の形態5に係る遮断システム1Dについて図8を用いて説明する。図8は、実施の形態5に係る遮断システム1Dの概略構成を示す図である。図8において、実線の矢印は、バスバー10に電流Ibが流れることで発生する磁束を表しており、幅広の破線の矢印は、外来ノイズとしての磁束を表している。なお、図8では、遮断装置20の図示を省略している。実施の形態5に係る遮断システム1Dは、主として2枚の基板30、31を備える点で実施の形態4に係る遮断システム1Cと相違する。以下、実施の形態4に係る遮断システム1Cと共通する点については説明を省略する。
2枚の基板30、31のうちの一方の基板30は、実施の形態1と同様に、バスバー10の上方に配置され、他方の基板31は、バスバー10の下方に配置されている。基板30、31は、いずれも実装面がバスバー10の幅広面11と平行となるように配置されている。第1電流センサ41は一方の基板30に配置され、第2電流センサ42は他方の基板31に配置されている。そして、一方の基板30と他方の基板31とは、コネクタ70により機械的かつ電気的に接続されている。
実施の形態5では、図8に示すように、第1電流センサ41及び第2電流センサ42は、いずれも厚み方向が幅広面11と直交する方向と一致するように配置されている。言い換えれば、第1電流センサ41及び第2電流センサ42は、それぞれの基板30、31に対する実装面がバスバー10の幅広面11と平行となるように配置されている。このため、実施の形態5では、実施の形態4と比較して、第1電流センサ41及び第2電流センサ42の各々を通過する磁束が大きくなるため、バスバー10に流れる電流Ibの測定精度を向上させることができる、という利点がある。
(まとめ)
以上述べたように、本開示の遮断システム1,1A,1B,1C,1Dは、バスバー10と、遮断装置20と、電流センサ40と、制御回路50と、を備える。バスバー10は、電力供給経路PLに挿入される。遮断装置20は、バスバー10の一部が分断されると、電力供給経路PLが遮断される。電流センサ40は、バスバー10を流れる電流を測定する。制御回路50は、電流センサ40の測定値に基づいて遮断装置20の駆動を制御する。電流センサ40は、非接触型の電流センサであり、バスバー10と間隔を空けて配置される。
以上述べたように、本開示の遮断システム1,1A,1B,1C,1Dは、バスバー10と、遮断装置20と、電流センサ40と、制御回路50と、を備える。バスバー10は、電力供給経路PLに挿入される。遮断装置20は、バスバー10の一部が分断されると、電力供給経路PLが遮断される。電流センサ40は、バスバー10を流れる電流を測定する。制御回路50は、電流センサ40の測定値に基づいて遮断装置20の駆動を制御する。電流センサ40は、非接触型の電流センサであり、バスバー10と間隔を空けて配置される。
この構成によれば、電流センサ40にはバスバー10に流れる電流Ibが流れないので、電力供給経路PLに大電流が流れる用途であっても、電流センサ40に大電流が流れることがなく、電流センサ40で過大な熱が発生することがない。このため、バスバー10に電流Ibが流れることに起因する熱の発生を抑制することができる、という利点がある。
また、電流センサ40は、バスバー10の幅広面11と対向するように配置されると好ましい。
この構成によれば、電流センサ40をバスバー10の側面(幅狭面)と対向するように配置する場合と比較して、バスバー10に電流Ibが流れることで発生する磁束が電流センサ40を通過しやすくなるので、バスバー10に流れる電流Ibの測定精度を向上させることができる、という利点がある。
また、電流センサ40は、幅広面11と直交する方向から見て、幅広面11の内側に収まるように配置されていていると好ましい。つまり、電流センサ40は、電流センサの全体が、幅広面11と直交する方向から見て、幅広面11に重なるように配置されていていると好ましい。
この構成によれば、仮に設計時に電流センサ40の位置ずれが生じたとしても、電流センサ40を通過する磁束は殆ど変化しないため、電流センサ40の位置ずれが電流センサ40の測定精度に影響を及ぼしにくい、という利点がある。
また、第1電流センサ41および第2電流センサ42は、バスバー10の幅広面11に対して同じ側に位置し、幅広面11と対向し、第1電流センサ41及び第2電流センサ42の各々は、幅広面11の幅方向に沿った軸と、幅広面11と直交する方向に沿った軸と、の2軸で磁束を検知可能であり、第1電流センサ41及び第2電流センサ42は、電流の測定値の極性が互いに異なっていると好ましい。
この構成によれば、2軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
また、第1電流センサ41及び第2電流センサ42は、幅広面11と平行な同じ面に配置され、同じ面の上において、第1電流センサ41は、前記第2電流センサに対して、180度回転させて配置されていていると好ましい。
この構成によれば、同種の2つの電流センサを用いて電流の測定値の極性が互いに異なる第1電流センサ41及び第2電流センサ42を実現できるので、互いに異なる種類の電流センサを用意しなくて済む、という利点がある。
また、第1電流センサ41および第2電流センサ42は、バスバー10の幅広面11と対して同じ側に位置し、第1電流センサ41は、バスバー10の幅広面11と対向するように配置されており、第2電流センサ42は、バスバー10に対して、第1電流センサ41よりも離れて配置されていると好ましい。
この構成によれば、1軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
また、第1電流センサ41及び第2電流センサ42は、バスバー10が延伸する方向に直交する同じ面に配置され、バスバー10は、第1電流センサ41と第2電流センサ42との間を延伸すると好ましい。
この構成によれば、1軸で検知可能な第1電流センサ41及び第2電流センサ42の各々の測定値を参照することにより、外来ノイズの少なくとも一部を除去することができ、バスバー10に流れる電流Ibの測定精度の低下を抑制することができる、という利点がある。
また、第1電流センサ41及び第2電流センサ42は、いずれも厚み方向が幅広面11と直交する方向と一致するように配置されていていると好ましい。
この構成によれば、第1電流センサ41及び第2電流センサ42の各々を通過する磁束が大きくなるため、バスバー10に流れる電流Ibの測定精度を向上させることができる、という利点がある。
また、電流センサ40は、コアレス型の磁気センサであってもよい。
この構成によれば、電流センサ40は、磁気コアを必要としないため、磁気ヒステリシスによる測定誤差も存在せず、磁気コアを用いた電流センサと比較してバスバー10に流れる電流Ibの測定精度が高い、という利点がある。
また、電流センサ40は、トンネル磁気抵抗素子を用いた磁気センサであってもよい。
この構成によれば、電流センサ40が例えばGMR(Giant Magnetoresistance:巨大磁気抵抗)素子を用いた磁気センサである場合と比較して磁気に対する感度が高いため、バスバー10に流れる電流Ibの測定精度を向上させることができる、という利点がある。
(その他の実施の形態)
以上、実施の形態1~5に係る遮断システム等について説明したが、本開示は、これらの実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を各実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示に含まれてもよい。
以上、実施の形態1~5に係る遮断システム等について説明したが、本開示は、これらの実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を各実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示に含まれてもよい。
例えば、実施の形態1において、電流センサ40はバスバー10の幅広面11と対向するように配置されていなくてもよい。つまり、電流センサ40は、バスバー10の側面と対向するように配置されていてもよい。この場合でも、バスバー10に電流Ibが流れることで発生する磁束φ0が通過するように電流センサ40を配置してさえいれば、バスバー10に流れる電流Ibを測定することが可能である。
例えば、実施の形態2において、第1電流センサ41及び第2電流センサ42は、互いに電流の測定値の極性が異なる別種類の電流センサで実現されていてもよい。
例えば、実施の形態1~5の各々において、制御回路50及び点火回路60は、一体に構成されていてもよい。例えば、制御回路50が点火回路60としての機能を有していてもよい。
例えば、実施の形態1~5の各々において、電流センサ40は磁気抵抗素子としてAMR(Anisotropic Magnetoresistance:異方向性磁気抵抗)素子又はGMR(Giant Magnetoresistance:巨大磁気抵抗)素子を用いた電流センサであってもよい。
遮断システムは、例えば、自動車等の車両、又は家庭電化製品等の電気製品等に搭載される。車両には、例えば、BEV(Battery Electric Vehicle)、PHEV(Plug-in Hybrid Vehicle)等のバッテリーを備える車両が含まれる。なお、遮断システムは、車両及び電気製品以外の電気回路を有する物体に搭載されてもよい。また、上記各実施の形態等における遮断システムは、例えば、蓄電システム又は送電システム等における過電流を遮断する用途に用いられてもよい。
本開示は、過電流発生時に電力供給経路を遮断する遮断システム等に有用である。
1、1A、1B、1C、1D 遮断システム
10 バスバー
11 幅広面
20 遮断装置
21 ケース
22 点火部
30、31 基板
40 電流センサ
41 第1電流センサ
42 第2電流センサ
50 制御回路
60 点火回路
70 コネクタ
φ1、φ2、φ3、φ4、φN1、φN2、φN3 磁束
Ib 電流
PL 電力供給経路
10 バスバー
11 幅広面
20 遮断装置
21 ケース
22 点火部
30、31 基板
40 電流センサ
41 第1電流センサ
42 第2電流センサ
50 制御回路
60 点火回路
70 コネクタ
φ1、φ2、φ3、φ4、φN1、φN2、φN3 磁束
Ib 電流
PL 電力供給経路
Claims (13)
- 電力供給経路に挿入されるバスバーと、
前記バスバーの一部が分断されると、前記電力供給経路が遮断される遮断装置と、
前記バスバーを流れる電流を測定する第1電流センサと、
前記第1電流センサの測定値に基づいて前記遮断装置の駆動を制御する制御回路と、
を備え、
前記第1電流センサは、非接触型の電流センサであり、前記バスバーと間隔を空けて配置される、
遮断システム。 - 前記バスバーは、幅の広い幅広面と、前記幅広面より幅が狭い幅狭面を有し、
前記電流センサは、前記バスバーの前記幅広面と対向するように配置されている、
請求項1に記載の遮断システム。 - 前記第1電流センサは、前記第1電流センサの全体が、前記幅広面と直交する方向から見て、前記幅広面に重なるように配置されている、
請求項2に記載の遮断システム。 - 第2電流センサを更に備え、
前記第1電流センサおよび前記第2電流センサは、前記バスバーの前記幅広面に対して同じ側に位置し、前記幅広面と対向し、
前記第1電流センサ及び前記第2電流センサの各々は、前記幅広面の幅方向に沿った軸と、前記幅広面と直交する方向に沿った軸と、の2軸で磁束を検知可能であり、
前記第1電流センサ及び前記第2電流センサは、前記電流の測定値の極性が互いに異なる、
請求項2に記載の遮断システム。 - 前記第1電流センサ及び前記第2電流センサは、前記幅広面と平行な同じ面に配置され、
前記同じ面の上において、前記第1電流センサは、前記第2電流センサに対して、180度回転させて配置されている、
請求項4に記載の遮断システム。 - 第2電流センサを更に備え、
前記第1電流センサおよび前記第2電流センサは、前記バスバーの前記幅広面に対して同じ側に位置し、
前記第1電流センサは、前記バスバーの幅広面と対向するように配置されており、
前記第2電流センサは、前記バスバーに対して、前記第1電流センサよりも離れて配置されている、
請求項1に記載の遮断システム。 - 第2電流センサを更に備え、
前記第1電流センサ及び前記第2電流センサは、前記バスバーが延伸する方向に直交する同じ面に配置され、
前記バスバーは、前記第1電流センサと前記第2センサとの間を延伸する、
請求項1に記載の遮断システム。 - 前記第1電流センサ及び前記第2電流センサは、いずれも厚み方向が前記幅広面と直交する方向と一致するように配置されている、
請求項7に記載の遮断システム。 - 前記第1電流センサは、コアレス型の磁気センサである、
請求項1~3のいずれか1項に記載の遮断システム。 - 前記第1電流センサは、トンネル磁気抵抗素子を用いた磁気センサである、
請求項9に記載の遮断システム。 - 前記1電流センサおよび前記2電流センサは、コアレス型の磁気センサである、
請求項4~8のいずれか1項に記載の遮断システム。 - 前記1電流センサおよび前記2電流センサは、トンネル磁気抵抗素子を用いた磁気センサである、
請求項11に記載の遮断システム。 - 前記遮断装置は、不可逆火工式遮断装置である、
請求項1~12のいずれか1項に記載の遮断システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022091254 | 2022-06-06 | ||
| JP2022-091254 | 2022-06-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023238585A1 true WO2023238585A1 (ja) | 2023-12-14 |
Family
ID=89118253
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/017539 WO2023238585A1 (ja) | 2022-06-06 | 2023-05-10 | 遮断システム |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2023238585A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004037147A (ja) * | 2002-07-01 | 2004-02-05 | Tdk Corp | 過電流センサ |
| JP2005195427A (ja) * | 2004-01-06 | 2005-07-21 | Asahi Kasei Electronics Co Ltd | 電流測定装置、電流測定方法および電流測定プログラム |
| JP2011112510A (ja) * | 2009-11-26 | 2011-06-09 | Honda Motor Co Ltd | 電流検出装置 |
| JP2012002561A (ja) * | 2010-06-15 | 2012-01-05 | Denso Corp | 電流センサ |
| WO2012117841A1 (ja) * | 2011-03-02 | 2012-09-07 | アルプス・グリーンデバイス株式会社 | 電流センサ |
| JP2016133498A (ja) * | 2015-01-22 | 2016-07-25 | 日本特殊陶業株式会社 | 電流電力センサ |
-
2023
- 2023-05-10 WO PCT/JP2023/017539 patent/WO2023238585A1/ja unknown
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004037147A (ja) * | 2002-07-01 | 2004-02-05 | Tdk Corp | 過電流センサ |
| JP2005195427A (ja) * | 2004-01-06 | 2005-07-21 | Asahi Kasei Electronics Co Ltd | 電流測定装置、電流測定方法および電流測定プログラム |
| JP2011112510A (ja) * | 2009-11-26 | 2011-06-09 | Honda Motor Co Ltd | 電流検出装置 |
| JP2012002561A (ja) * | 2010-06-15 | 2012-01-05 | Denso Corp | 電流センサ |
| WO2012117841A1 (ja) * | 2011-03-02 | 2012-09-07 | アルプス・グリーンデバイス株式会社 | 電流センサ |
| JP2016133498A (ja) * | 2015-01-22 | 2016-07-25 | 日本特殊陶業株式会社 | 電流電力センサ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10670637B2 (en) | Current measuring circuit, battery and motor vehicle | |
| EP2942631B1 (en) | Hybrid current sensor assembly | |
| JP7111387B2 (ja) | 複合型電流測定装置 | |
| JP5577544B2 (ja) | 電流センサ | |
| US10861663B2 (en) | Relay device and a method to detect open-circuit failures | |
| US10222423B2 (en) | Electrical storage system | |
| JP6046864B1 (ja) | 2つの異なるバッテリセルの2つのセル電流の差分を測定する装置を備えた、複数の電気化学的なバッテリセルを有するバッテリパック | |
| US8465859B2 (en) | Current sensor | |
| KR102194985B1 (ko) | 배터리 보호 회로 및 이를 포함하는 배터리 팩 | |
| US10379150B2 (en) | Earth fault detector | |
| WO2012043591A1 (ja) | 電源装置 | |
| US20180321281A1 (en) | Current sensor | |
| US10641798B2 (en) | Current detection device having a fixing portion formed in a wiring member | |
| US8624600B2 (en) | Current detecting device | |
| US10850618B2 (en) | Connection module for an electrical energy storage device, and power supply system | |
| KR20210093767A (ko) | 저항 어셈블리, 저항 어셈블리를 구비한 측정 회로, 그리고 저항 어셈블리용 스트립형 복합 재료의 제조 방법 | |
| CN107765073A (zh) | 过电流检测装置、蓄电装置以及电流检测方法 | |
| KR102044598B1 (ko) | 배터리 팩 고장 검출 장치 및 방법 | |
| JP2016006407A (ja) | 出力電流及び地絡抵抗の検出装置 | |
| JP2010175276A (ja) | 磁気比例式電流センサ | |
| US20210383985A1 (en) | Relay module | |
| WO2023238585A1 (ja) | 遮断システム | |
| JP2017015432A (ja) | 電流検出装置 | |
| JP7549027B2 (ja) | 電流センサ | |
| JP2012057973A (ja) | 電流検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23819569 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2024526316 Country of ref document: JP Kind code of ref document: A |