WO2023233656A1 - 信号処理装置および信号処理方法 - Google Patents
信号処理装置および信号処理方法 Download PDFInfo
- Publication number
- WO2023233656A1 WO2023233656A1 PCT/JP2022/022634 JP2022022634W WO2023233656A1 WO 2023233656 A1 WO2023233656 A1 WO 2023233656A1 JP 2022022634 W JP2022022634 W JP 2022022634W WO 2023233656 A1 WO2023233656 A1 WO 2023233656A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sar image
- simulated
- information
- dimensional information
- reliability
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/9021—SAR image post-processing techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/9021—SAR image post-processing techniques
- G01S13/9023—SAR image post-processing techniques combined with interferometric techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/9021—SAR image post-processing techniques
- G01S13/9027—Pattern recognition for feature extraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/761—Proximity, similarity or dissimilarity measures
Definitions
- the present invention relates to a signal processing device and a signal processing method using SAR images.
- Patent Documents 1 to 4 describe change detection technology using SAR (Synthetic Aperture Radar) images.
- Patent Documents 1 to 4 a technique for detecting a change from a steady state in an SAR image to be analyzed using a complex correlation coefficient is not described in Patent Documents 1 to 4.
- the steady state is represented, for example, by a predetermined complex image.
- the imaging conditions for the complex image showing the steady state match the imaging conditions for the SAR image to be analyzed.
- the disaster countermeasure support method described in Patent Document 4 uses only the reflection intensity of reflected waves. That is, each of the techniques described in Patent Documents 1 to 4 cannot correctly detect changes from a steady state.
- a state where there is no change in the object of observation, or a state where the change cannot be detected even if there is a change in the object of observation is referred to as a "steady state.”
- One of the objects of the present invention is to provide a signal processing device and a signal processing method that can accurately detect changes in an object.
- the signal processing device shows three-dimensional information composed of estimated values of reflection intensity and phase at three-dimensional positions in a steady state reconstructed using observed SAR images, and the reliability of the three-dimensional information.
- a reliable 3D information reconstruction means that generates reliable 3D information including 3D information, and 3D information and the shooting conditions of the SAR image to be analyzed.
- a simulated SAR image generating means that generates a simulated SAR image that is a complex image showing a steady state suitable for and calculates reliability information representing reliability of the simulated SAR image.
- a computer obtains three-dimensional information consisting of estimated values of reflection intensity and phase at three-dimensional positions in a steady state reconstructed using observed SAR images, and reliability of the three-dimensional information. generate reliable 3D information that includes information indicating the nature of the image, and use the 3D information and the shooting conditions of the SAR image to be analyzed to indicate a steady state suitable for the shooting conditions of the SAR image to be analyzed.
- This is a method of generating a simulated SAR image, which is a complex image, and calculating reliability information representing the reliability of the simulated SAR image.
- the signal processing program provides a computer with three-dimensional information consisting of estimated values of reflection intensity and phase at three-dimensional positions in a steady state reconstructed using observed SAR images, and reliability of the three-dimensional information.
- generate reliable three-dimensional information that includes information indicating the nature of the image, and use the three-dimensional information and the photographing conditions of the SAR image to be analyzed to indicate a steady state suitable for the photographing conditions of the SAR image to be analyzed.
- a simulated SAR image that is a complex image is generated, and reliability information indicating the reliability of the simulated SAR image is calculated.
- FIG. 2 is an explanatory diagram showing the relationship between a coherence value and the correlation between reflection intensity and phase between SAR images.
- FIG. 2 is an explanatory diagram showing an example of a SAR satellite that photographs a building.
- FIG. 2 is an explanatory diagram showing an example of a layover phenomenon that occurs in a SAR image.
- FIG. 2 is a block diagram showing a configuration example of a signal processing device according to a reference example.
- FIG. 3 is an explanatory diagram showing an example of a method of estimating a complex reflection intensity distribution at a pixel corresponding to an azimuth range position using SAR tomography. 3 is a flowchart showing signal processing executed by a signal processing device of a reference example.
- FIG. 6 is an explanatory diagram for explaining change detection processing when a SAR image indicating a steady state includes information other than the steady state.
- FIG. 1 is a block diagram illustrating a configuration example of a signal processing device according to a first embodiment.
- FIG. 6 is an explanatory diagram for explaining improved change detection processing when an observed SAR image showing a steady state includes information other than the steady state.
- FIG. 2 is a block diagram showing another configuration example of the signal processing device according to the first embodiment.
- FIG. 7 is an explanatory diagram for explaining another improved change detection process when an observed SAR image showing a steady state includes information other than the steady state.
- 3 is a flowchart showing signal processing performed by the signal processing device of the first embodiment. It is a flowchart which shows three-dimensional information reconstruction processing in a 1st embodiment. 3 is a flowchart showing simulated SAR image generation processing in the first embodiment. 7 is a flowchart showing signal processing executed by a signal processing device according to another aspect of the first embodiment. 12 is a flowchart showing three-dimensional information reconstruction processing in another aspect of the first embodiment. 12 is a flowchart showing simulated SAR image generation processing in another aspect of the first embodiment. FIG.
- FIG. 2 is a block diagram showing a configuration example of a signal processing device according to a second embodiment.
- FIG. 3 is an explanatory diagram showing a specific example of a first change detection process executed by a first change detection unit.
- 7 is a flowchart showing signal processing performed by the signal processing device of the second embodiment. It is a flowchart which shows the 1st change detection process which a 1st change detection part performs.
- FIG. 3 is a block diagram showing a configuration example of a signal processing device according to a third embodiment.
- 12 is a flowchart showing signal processing performed by a signal processing device according to a third embodiment. It is a flowchart which shows the 2nd change detection process which a 2nd change detection part performs.
- 1 is a block diagram showing an example of a computer having a CPU.
- FIG. 2 is a block diagram showing the main parts of the signal processing device.
- background difference detection technology and anomaly detection technology are known. These techniques are used, for example, to detect objects other than permanently present objects, such as buildings. Additionally, these techniques are used to detect ground conditions such as new construction or collapse of buildings. Note that objects other than permanently existing objects include, for example, vehicles and aircraft. However, if a vehicle or an aircraft exists over the monitoring period, it can be said that it is an object that constantly exists.
- Image data indicating a steady state is selected from image data acquired and accumulated in the past. Further, image data indicating a steady state may be generated from accumulated image data.
- a SAR image is a complex image that has information on the reflection intensity and phase information of the irradiated microwave for each pixel.
- Coherent change detection technology is one of the change detection techniques for complex images.
- Coherent change detection technology is a technology that detects minute changes from a steady state based on the value of a complex correlation coefficient (coherence) that indicates the degree of similarity between images.
- Coherence which is a complex correlation coefficient between SAR images, is one index indicating the correlation of intensity and phase in a local region between SAR images. Since the method of detecting a change using coherence uses phase information in addition to intensity, it is possible to increase the sensitivity of change detection.
- FIG. 1 is an explanatory diagram showing the relationship between the coherence value and the correlation of reflection intensity and phase between SAR images. As shown in FIG. 1, the larger the coherence value, the higher the similarity in reflection intensity between SAR images, and the higher the similarity in phase between SAR images. That is, the larger the coherence value, the less variation between SAR images.
- the smaller the coherence value the lower at least one of the reflection intensity similarity between SAR images and the phase similarity between SAR images. That is, the smaller the coherence value, the more changes between SAR images.
- the coherence value is an index that is more sensitive to changes in the phase of the reflected wave than to changes in the reflection intensity. As shown in FIG. 1, the coherence value becomes lower when the phase similarity is lower than the reflection intensity similarity. Coherent change detection technology can also detect changes in reflectors.
- One challenge is to generate complex images that exhibit steady state conditions that are suitable for SAR image analysis.
- SAR images observed by SAR satellites orbiting the earth have different shooting conditions for each observation.
- the photographing conditions include the position of the SAR satellite at the time of observation, the coordinates of the area to be analyzed, the resolution, etc. Therefore, even when a region in a steady state is observed, differences occur between SAR images obtained for each observation.
- the phase information changes greatly with each observation.
- a complex image with consistent imaging conditions a complex image showing a steady state
- changes in the image due to differences in imaging conditions cannot be interpreted as changes occurring within the area to be analyzed. It will be done. In other words, changes in images due to differences in imaging conditions can cause false detections.
- the SAR satellite is an artificial satellite equipped with SAR.
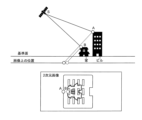
- FIG. 2 is an explanatory diagram showing an example of a SAR satellite that photographs a building.
- FIG. 3 is an explanatory diagram showing an example of a layover phenomenon occurring in a SAR image.
- a SAR satellite photographs an area including a building and a house under conditions where a layover phenomenon occurs, a two-dimensional image (SAR image) in which the building and house overlap is photographed, as illustrated in FIG.
- the area where a building and a house overlap in the two-dimensional image illustrated in FIG. 3 is a layover area where signals received from a plurality of reflectors overlap. Since information on multiple buildings overlaps, it is difficult to extract information on individual buildings from the layover area.
- the phase of the SAR image obtained for each observation also depends on the reflection intensity of the overlapping buildings. If the imaging conditions differ, the degree of overlapping of buildings also differs, so even if there is no change in the steady state of the observation target, the observed SAR images will have different phases.
- the SAR image obtained for each observation differs.
- the amplitude and phase of pixels constituting a permanently existing object such as a building in a SAR image depend on the shooting conditions of the SAR image.
- phase information other than coherence values there is a method of extracting phase information from a SAR image as a real value and obtaining correlation with the extracted real value.
- FIG. 4 is a block diagram showing a configuration example of a signal processing device as a reference example.
- the signal processing device 500 shown in FIG. 4 generates a simulated SAR image from a plurality of observed SAR images accumulated in the SAR image storage unit 600.
- a simulated SAR image means a complex image (a complex image showing a steady state) suitable for the shooting conditions of the SAR image to be analyzed.
- the simulated SAR image is a two-dimensional image in which three-dimensional information of the reconstructed region to be analyzed is simulated using reflection intensity information and phase information.
- the reflection intensity and phase are the reflection intensity and phase that are predicted to be observed when the image is captured under the same imaging conditions as the SAR image to be analyzed.
- a "complex image suitable for the shooting conditions of the SAR image to be analyzed (a complex image showing a steady state)" is taken under the same shooting conditions as the shooting conditions of the SAR image to be analyzed, that is, the shooting conditions of the observed SAR image. It means a visible complex image.
- the three-dimensional information is represented by data having information on reflection intensity and phase information at a three-dimensional position in a steady state.
- the SAR image to be analyzed is a SAR image to which change detection is applied.
- the SAR image to be analyzed is obtained by being photographed by a SAR satellite. Therefore, the simulated SAR image is a complex image that shows a steady state suitable for the imaging conditions of the SAR image to be analyzed.
- the signal processing device 500 includes a three-dimensional information reconstruction section 510 and a simulated SAR image generation section 520. Further, as shown in FIG. 4, the signal processing device 500 receives an observed SAR image from the SAR image storage unit 600.
- the signal processing device 500 includes only the simulated SAR image generation unit 520.
- the SAR image storage unit 600 stores a plurality of observed SAR images. Note that the SAR image storage unit 600 may be included in the signal processing device 500.
- a plurality of observed SAR images accumulated in the SAR image storage unit 600 are input to the three-dimensional information reconstruction unit 510.
- the input observed SAR image is a complex image having information on the reflection intensity and phase information of the irradiated microwave for each pixel.
- the observed SAR image includes information on imaging conditions indicating the position of the SAR satellite at the time of observation, coordinates of the area to be analyzed, resolution, and the like.
- the three-dimensional information reconstruction unit 510 is not limited to an observed SAR image obtained in a steady state, but may also be inputted with an observed SAR image obtained when there is a change from the steady state in the region to be analyzed. .
- the three-dimensional information reconstruction unit 510 has a function of reconstructing and outputting three-dimensional information (data having reflection intensity information and phase information at each three-dimensional position in a steady state) of the region to be analyzed.
- the three-dimensional information output by the three-dimensional information reconstruction unit 510 may be a three-dimensional complex reflection intensity distribution having reflection intensity information and phase information.
- the three-dimensional information may be three-dimensional point group data that is a set of points having reflection intensity information and phase information. Note that the three-dimensional information may include information such as temperature and displacement in addition to reflection intensity information and phase information.
- SAR tomography is a method for reconstructing three-dimensional information.
- SAR tomography is a method of estimating the complex reflection intensity distribution in the elevation direction for each pixel using a plurality of observed SAR images.
- the elevation direction can be defined, for example, as a direction perpendicular to the azimuth-range plane (the plane formed by the direction of travel of the SAR satellite and the direction of line of sight).
- the three-dimensional information is information about each point in a three-dimensional space having an azimuth direction, a range direction, and an elevation direction.
- Each point has reflection intensity information (reflection intensity estimate) and phase information (phase estimate).
- FIG. 5 is an explanatory diagram showing an example of a method for estimating the complex reflection intensity distribution at a pixel corresponding to the azimuth range position (x ⁇ ) using SAR tomography.
- the plane perpendicular to the direction s represents the azimuth-range plane.
- the azimuthal range position (x ⁇ ) is the intersection of the axis indicating the elevation direction and the axis indicating the line of sight direction of the satellite in FIG.
- the three-dimensional information reconstruction unit 510 estimates, for each pixel, a complex reflection intensity distribution that indicates the height, reflection intensity, and phase of a building that constantly exists over the observation period, based on a plurality of observed SAR images. do.
- a three-dimensional complex reflection intensity distribution is generated by combining the complex reflection intensities obtained for each pixel for all pixels in the area to be analyzed. Ru.
- the upper part of FIG. 5 shows the first to Nth observations by the SAR satellite.
- N represents the total number of observations.
- N is an integer greater than 1.
- the first to Nth observations shown in FIG. 5 correspond to synthetic apertures in the elevation direction.
- the relational expression between the received signal (complex signal) recorded at the pixel corresponding to the azimuth-range position (x ⁇ ) and the complex reflection intensity distribution at that pixel is, for example, , is expressed by the following equation (1).
- g obs (x ⁇ ,n) in equation (1) represents a received signal (complex signal) recorded in a pixel corresponding to the azimuth range position (x ⁇ ).
- r ⁇ (x ⁇ ,n) in equation (1) represents the steering vector at the pixel corresponding to the azimuth range position (x ⁇ ).
- ⁇ ⁇ (x ⁇ ,n) in equation (1) represents the complex reflection intensity distribution at the pixel corresponding to the azimuth range position (x ⁇ ).
- the steering vector is obtained from the imaging conditions.
- the steering vector r ⁇ (x ⁇ ,n) is expressed by the following equation (2).
- k n in equation (2) represents an altitude-phase conversion coefficient (a coefficient for converting between phase and altitude).
- the steering vector may be expressed by a formula other than formula (2). For example, a steering vector that takes into account the effects of temperature and displacement may be used.
- j in equation (2) represents an imaginary unit.
- ⁇ in equation (2) represents pi.
- Exp represents an exponential function whose base is Napier's number.
- C represents a complex number.
- a relational expression such as equation (1) is determined for each of the 1st to Nth observations.
- the three-dimensional information reconstruction unit 510 solves an optimization problem using a plurality of observation data (received signals) and steering vectors, thereby determining the constant presence in the pixel corresponding to the azimuth-range position (x ⁇ ). Obtain the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) of the building.
- the three-dimensional information reconstruction unit 510 determines the complex reflection intensity distribution so that the N times of observation data in which the area including the buildings etc. was photographed and the N times of the steering vector match, thereby reconstructing the structure. Obtain the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ).
- the lower part of FIG. 5 shows the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) of a permanently existing building at the pixel corresponding to the azimuth range position (x ⁇ ) obtained by the three-dimensional information reconstruction unit 510.
- is shown.
- corresponds to the reflection intensity on the vertical axis shown in the lower part of FIG.
- the horizontal axis shown in the lower part of FIG. 5 indicates the elevation position.
- the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) shown in FIG. 5 shows large values at the elevation positions s l1 (ground), s l2 (house), and s l3 (building). That is, the received signal at the position x ⁇ is a signal in which the complex reflection intensities at the elevation positions s l1 , s l2 , and s l3 are superimposed. Expressed more precisely, the received signal at the position x ⁇ corresponds to the result of the Fourier transform of the complex reflection intensity distribution in the elevation direction.
- the three-dimensional information reconstruction unit 510 When SAR tomography is used in the three-dimensional information reconstruction unit 510, the three-dimensional information reconstruction unit 510 combines three-dimensional complex reflection intensity distributions for each pixel for all pixels in the area to be analyzed. Create a reflection intensity distribution. The three-dimensional information reconstruction unit 510 then outputs the three-dimensional complex reflection intensity distribution as three-dimensional information. The three-dimensional information reconstruction unit 510 does not create a three-dimensional complex reflection intensity distribution, but instead generates three-dimensional point cloud data, which is a set of points having information on the position of the reflector, reflection intensity, and phase information. It may also be created as three-dimensional information.
- Three-dimensional information reconstructed by the three-dimensional information reconstruction unit 510 is input to the simulated SAR image generation unit 520.
- the imaging conditions for one or more SAR images to be analyzed are also input to the simulated SAR image generation unit 520.
- the SAR image to be analyzed is, for example, one or more observed SAR images selected from a plurality of observed SAR images accumulated in the SAR image storage unit 600.
- a plurality of observed SAR images may be referred to as an observed SAR image group. That is, the observed SAR image group includes a plurality of observed SAR images.
- the SAR image to be analyzed may be one or more newly acquired observed SAR images. Furthermore, the plurality of SAR images to be analyzed may include a mixture of observed SAR images in the SAR image storage unit 600 and newly acquired observed SAR images.
- the shooting conditions of the SAR image to be analyzed that are input to the simulated SAR image generation unit 520 are, for example, the shooting conditions of the observed SAR image used to reconstruct the three-dimensional information in the three-dimensional information reconstruction unit 510. be.
- the imaging conditions for one or more newly acquired observed SAR images may be used.
- the imaging conditions include the position of the SAR satellite at the time of observation, the coordinates of the area to be analyzed, and the resolution.
- the imaging conditions may be the imaging conditions for observed SAR images stored in the SAR image storage unit 600, or may be the imaging conditions for newly acquired observed SAR images.
- the simulated SAR image generation unit 520 generates reconstructed three-dimensional information (data having reflection intensity information and phase information at three-dimensional positions in a steady state) and one or more SAR images to be analyzed. It has a function to perform pseudo observations using shooting conditions. Specifically, the simulated SAR image generation unit 520 generates a simulated SAR image that is a complex image (a complex image indicating a steady state) suitable for the imaging conditions of one or more SAR images to be analyzed.
- pseudo observation means calculating an image that would be predicted if it were assumed to be photographed under the same photographing conditions as the analytical SAR image described above.
- the simulated SAR image generation unit 520 performs simulated observation for each imaging condition of one or more SAR images to be analyzed. After performing the simulated observation one or more times, the simulated SAR image generation unit 520 outputs a simulated SAR image corresponding to each of the one or more acquired imaging conditions.
- the signal processing device 500 uses data having information on reflection intensity and phase information at a three-dimensional position in a steady state, that is, three-dimensional information, the signal processing device 500 can generate a steady state that matches the shooting conditions of the SAR image to be analyzed.
- a simulated SAR image which is a complex image shown in FIG.
- the three-dimensional information reconstruction unit 510 calculates three-dimensional information using a group of observed SAR images obtained by photographing a region by SAR.
- the simulated SAR image generation unit 520 also captures a SAR image to be analyzed using three-dimensional information in a steady state reconstructed using the observed SAR image group and the imaging conditions for the SAR image to be analyzed.
- a simulated SAR image which is a complex image showing a steady state suitable for the conditions, is generated.
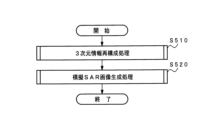
- FIG. 6 is a flowchart showing signal processing performed by the signal processing device 500.
- the three-dimensional information reconstruction unit 510 executes three-dimensional information reconstruction processing (step S510).
- the three-dimensional information reconstruction process is a process of reconstructing three-dimensional information of a region to be analyzed based on a group of observed SAR images.
- the simulated SAR image generation unit 520 of the signal processing device 500 executes simulated SAR image generation processing (step S520).
- the simulated SAR image generation process is a process of generating one or more simulated SAR images based on the imaging conditions of one or more SAR images to be analyzed and reconstructed three-dimensional information.
- the simulated SAR image is an image in which a simulated received signal is recorded when observed under the same photographing conditions as the SAR image to be analyzed.
- the signal processing device 500 After performing the simulated SAR image generation process, the signal processing device 500 ends the signal processing.
- FIG. 7 is a flowchart showing three-dimensional information reconstruction processing executed by the three-dimensional information reconstruction unit 510.
- the three-dimensional information reconstruction unit 510 derives a steering vector r ⁇ (x ⁇ ,n) from the imaging conditions of each observed SAR image in the observed SAR image group (step S511).
- the three-dimensional information reconstruction unit 510 repeatedly executes the process of calculating the complex reflection intensity distribution for each of the plurality of pixels.
- the three-dimensional information reconstruction unit 510 selects one pixel for which a complex reflection intensity distribution has not yet been calculated from among the pixels in the observed SAR image group.
- the selected pixel corresponds to the selected position in the observed SAR image.
- the three-dimensional information reconstruction unit 510 uses the received signal of the selected pixel (selected position) in the observed SAR image group and the steering vector for each of the observed SAR images to calculate the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) is calculated (step S512).
- the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) of the pixel corresponding to the position x ⁇ is calculated.
- the three-dimensional information reconstruction unit 510 repeatedly executes the process of step S512 until it calculates the complex reflection intensity distribution for all pixels in the observed SAR image group. That is, the three-dimensional information reconstruction unit 510 performs pixel loop processing. When the complex reflection intensity distribution for all pixels in the observed SAR image group has been calculated, the pixel loop is exited. When exiting the pixel loop, the three-dimensional information of the target area has been reconstructed.
- the three-dimensional information reconstruction unit 510 converts the calculated three-dimensional complex reflection intensity distribution into data having reflection intensity information and phase information at three-dimensional positions in a steady state, that is, It is output as three-dimensional information (step S514).
- the output three-dimensional information may be a three-dimensional complex reflection intensity distribution as described above, or may be three-dimensional point group data that is a set of points having reflection intensity information and phase information.
- FIG. 8 is a flowchart showing the simulated SAR image generation process executed by the simulated SAR image generation unit 520.
- the simulated SAR image generation unit 520 derives a steering vector r ⁇ (x ⁇ ,n) from each of the input imaging conditions of the SAR image to be analyzed (step S521).
- the simulated SAR image generation unit 520 repeatedly executes the process of calculating a simulated complex signal for each of the shooting conditions of the SAR image to be analyzed. That is, the simulated SAR image generation unit 520 performs imaging condition loop processing.
- the simulated SAR image generation unit 520 selects one imaging condition that has not yet been used to generate a simulated SAR image from among the imaging conditions of the SAR image to be analyzed.
- the simulated SAR image generation unit 520 repeatedly executes the process of step S522 until it calculates simulated complex signals for all pixels in the observed SAR image group corresponding to the selected imaging condition. That is, the simulated SAR image generation unit 520 performs pixel loop processing. When simulated complex signals for all pixels in the observed SAR image group have been calculated, the pixel loop is exited. When exiting the pixel loop, simulated complex signals regarding all pixels in the observed SAR image corresponding to the selected imaging condition have been calculated. That is, a simulated SAR image corresponding to the selected imaging conditions is generated.
- the simulated SAR image generation unit 520 selects one pixel for which a simulated complex signal has not yet been calculated from the pixels of the observed SAR image group corresponding to the selected imaging condition.
- the simulated SAR image generation unit 520 uses the input complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) and the steering vector r ⁇ (x ⁇ ,n) corresponding to the selected imaging condition to generate the selected pixel.
- a simulated complex signal g sim (x ⁇ ,n) at the position x ⁇ corresponding to is calculated (step S522).
- the simulated SAR image generation unit 520 calculates a simulated complex signal according to the following equation (3), for example.
- the simulated SAR image generation unit 520 may calculate the simulated complex signal according to a formula other than formula (3).
- the photographing condition loop is exited.
- the imaging condition loop is exited, a simulated SAR image of the target area has been generated corresponding to each of the input imaging conditions of the SAR images to be analyzed.
- the simulated SAR image generation unit 520 After exiting the imaging condition loop, the simulated SAR image generation unit 520 outputs a simulated SAR image that is a complex image (complex image indicating a steady state) suitable for the input imaging conditions of the SAR image to be analyzed (step S524).
- a complex image complex image indicating a steady state
- the three-dimensional information reconstruction unit 510 of the signal processing device 500 generates information on the reflection intensity at each three-dimensional position in the steady state of the region to be analyzed based on the observed SAR image group accumulated in the SAR image storage unit 600. and phase information, that is, three-dimensional information is reconstructed. Furthermore, the simulated SAR image generation unit 520 generates one or more simulated SAR images based on the imaging conditions of one or more SAR images to be analyzed and the reconstructed three-dimensional information.
- An advantage of using SAR tomography is that simulated complex signals indicating the reflection intensity and phase of each overlapping reflector are recorded in a simulated SAR image.
- a DEM Digital Elevation Model
- the signal processing device 500 of the above reference example can generate a complex image showing a steady state suitable for SAR image analysis.
- a user who performs coherent change detection using the generated simulated SAR image can robustly detect changes even in the layover region. In other words, when detecting a change from a steady state in the SAR image to be analyzed, the change can be detected with high accuracy.
- the three-dimensional information reconstruction unit 510 used SAR tomography as a means for calculating three-dimensional information.
- the three-dimensional information reconstruction unit 510 may use other means other than SAR tomography that can reproduce the reflection intensity and phase as a means for calculating the three-dimensional information.
- FIG. 9 is an explanatory diagram for explaining change detection processing when a SAR image indicating a steady state includes information other than the steady state.
- an observed SAR image stored in the SAR image storage unit 600 will be used.
- the observed SAR image group shown in FIG. 9 includes an observed SAR image A that includes information A1 other than the steady state.
- the three-dimensional information reconstruction unit 510 reconstructs three-dimensional information of the region to be analyzed based on the observed SAR image group.
- the reconstructed three-dimensional information is influenced by information A2 other than the steady state caused by information A1 .
- the information A3 other than the steady state caused by the information A2 is reflected in the simulated SAR image generated by the simulated SAR image generation unit 520.
- FIG. 9 exemplifies a cross-correlation image, that is, a coherence map, between the simulated SAR image and the observed SAR image.
- the coherence map the coherence value of the area where halftone dots are applied is large.
- the coherence value of area A4 is small. The reason why the coherence of the region A4 is low is that information A3 other than the steady state is reflected.
- the signal processing device of the embodiment below can generate a complex image showing a steady state that is more suitable for SAR image analysis than the signal processing device of the reference example described above. As a result, when detecting a change from a steady state in the SAR image to be analyzed, the change can be detected with higher accuracy.
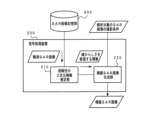
- FIG. 10 is a block diagram illustrating a configuration example of a signal processing device according to a first aspect of the first embodiment.
- the signal processing device 100 shown in FIG. 10 includes a reliable three-dimensional information reconstruction unit 110 and a simulated SAR image generation unit 120.
- a plurality of observed SAR images accumulated in the SAR image storage unit 600 are input to the reliable three-dimensional information reconstruction unit 110.
- an observed SAR image captured when there is a change from a steady state may be input to the reliable three-dimensional information reconstruction unit 110.
- the signal processing device 100 includes only the simulated SAR image generation unit 120.
- the reliable three-dimensional information reconstructing unit 110 reconstructs three-dimensional information of the area to be analyzed. Reconfigure and output.
- the three-dimensional information may include information such as temperature and displacement in addition to information on reflection intensity and phase.
- the reliable three-dimensional information reconstruction unit 110 calculates an index value (hereinafter referred to as reliability index value) indicating the reliability of three-dimensional information, and calculates the reliability index value. It has a function to output values.
- the observed SAR image is an image in which received signals are recorded.
- the reliable three-dimensional information reconstruction unit 110 evaluates the discrepancy between the received signal and the received signal (predicted signal) predicted from the reconstructed three-dimensional information for each of the reflection intensity and phase. Calculate the reliability index value.
- the reliable three-dimensional information reconstruction unit 110 calculates a reliability index value by evaluating how likely each estimated value in the reconstructed three-dimensional information is among possible values. Good too.
- the three-dimensional information with reliability reconstruction unit 110 may perform both the evaluation of discrepancies and the evaluation of the certainty of estimated values.
- the reliable three-dimensional information reconstruction unit 110 evaluates discrepancies using, for example, the difference between the received signal and the predicted signal. When using the difference between the received signal and the predicted signal, a squared difference error, an absolute value difference, etc. are used. When evaluating a discrepancy, the reliable three-dimensional information reconstruction unit 110 evaluates a function obtained by adding a term expressing the complexity of the reconstructed three-dimensional information to the difference between the received signal and the predicted signal. Good too. In general, three-dimensional scatterers often exist sparsely, and a term generally called a regularization term can be included as a term for determining that such a solution is better. In particular, L0, L1, L2 norms, etc. can be employed as regularization terms.
- the reliable three-dimensional information reconstruction unit 110 sets the received signal used to evaluate the difference from the predicted value to a received signal different from the received signal used for three-dimensional information reconstruction. By doing so, cross-validation may be used to evaluate the generalization performance of the reconstructed three-dimensional information.
- the reliable three-dimensional information reconstruction unit 110 converts the parameters (variance value, covariance matrix, confidence interval, etc.) and posterior distribution of each estimated value obtained by Bayesian estimation into the probability of the estimated value. Output as .
- the reliable three-dimensional information reconstruction unit 110 may calculate the reliability index value by evaluating the squared error or loss function in optimal processing when reconstructing three-dimensional information.
- the simulated SAR image generation unit 120 Similar to the simulated SAR image generating section 520 shown in FIG. It has the function of generating images. Furthermore, the imaging conditions for one or more SAR images to be analyzed are also input to the simulated SAR image generation unit 120. Then, as in the case of the reference example, the simulated SAR image generation unit 120 generates a simulated SAR image that is a complex image (complex image indicating a steady state) suitable for the imaging conditions of one or more SAR images to be analyzed. generate.
- a complex image complex image indicating a steady state
- the simulated SAR image generation unit 120 uses the reliability index value input from the reliable three-dimensional information reconstruction unit 110 to generate each of the generated simulated SAR images. It has a function of generating information representing reliability (hereinafter referred to as reliability information).
- the simulated SAR image generation unit 120 generates reliability information through statistical processing using the generated simulated SAR image and reliability index values. For example, when the reliable three-dimensional information reconstruction unit 110 uses Bayesian estimation, the simulated SAR image generation unit 120 uses the variance and covariance matrix of the posterior probability distribution of the obtained three-dimensional information, Evaluate the reliability of simulated SAR images.
- the simulated SAR image generation unit 120 may use the standard deviation of predictions that can be calculated for each imaging condition and each pixel of the simulated SAR image. In that case, the simulated SAR image generation unit 120 can use the standard deviation of prediction itself as reliability information, for example. The simulated SAR image generation unit 120 may also compare reliability information for each pixel with a predetermined threshold value to identify pixels with low reliability, and use the identification result as reliability information.
- FIG. 11 is an explanatory diagram for explaining an example of improved change detection processing when an observed SAR image showing a steady state includes information other than the steady state.
- FIG. 11 corresponds to an explanatory diagram for explaining the processing of the signal processing device 100 and the change detection processing using the simulated SAR image generated by the signal processing device 100. Specifically, a part of the process shown in FIG. 11 corresponds to the process executed by the reliable three-dimensional information reconstruction unit 110 and the simulated SAR image generation unit 120.
- an observed SAR image stored in the SAR image storage unit 600 will be used. Assume that the observed SAR image group shown in FIG. 11 includes an observed SAR image A that includes information A1 other than the steady state.
- the reliable three-dimensional information reconstruction unit 110 reconstructs three-dimensional information of the region to be analyzed based on the observed SAR image group. The reconstructed three-dimensional information is influenced by information A2 other than the steady state caused by information A1 .
- the three-dimensional information with reliability reconstruction unit 110 calculates a reliability index value of the reconstructed three-dimensional information.
- the reconstructed three-dimensional information is influenced by information A2 other than the steady state caused by information A1 .
- the information A3 other than the steady state caused by the information A2 is reflected in the simulated SAR image generated by the simulated SAR image generation unit 120.
- the coherence value of the area where halftone dots are applied is large.
- the coherence value of area A4 is small.
- the simulated SAR image generation unit 120 since the simulated SAR image generation unit 120 generates reliability information based on the reliability index, coherence values are evaluated for positions (pixels) with low reliability when change detection processing is executed. It becomes possible to avoid this. As a result, when detecting a change from a steady state in the SAR image to be analyzed, the change can be detected with higher accuracy.
- change detection process is executed by a first change detection unit 130 or a second change detection unit 140, which will be described later.
- FIG. 12 is a block diagram showing another configuration example of the signal processing device of the first embodiment.
- the signal processing device 200 shown in FIG. 12 includes a reliable three-dimensional information estimation section 210 and a simulated SAR image generation section 220.
- a plurality of observed SAR images accumulated in the SAR image storage unit 600 are input to the reliable three-dimensional information estimation unit 210 .
- an observed SAR image captured when there is a change from a steady state may be input to the reliable three-dimensional information estimation unit 210.
- the signal processing device 200 includes only the simulated SAR image generation unit 220.
- the three-dimensional information estimation unit with reliability 210 obtains information about how likely the values are for the reflection intensity and phase at each point (each position) in a three-dimensional space having an azimuth direction, a range direction, and an elevation direction. It has a function to calculate the function to be expressed.
- this function may be referred to as three-dimensional information with reliability.
- the information generated by the reliable three-dimensional information reconstruction unit 110 shown in FIG. 10 that is, the combination of three-dimensional information and reliability index value, also corresponds to reliable three-dimensional information.
- the simulated SAR image generation section 220 has the functions of the simulated SAR image generation section 520 shown in FIG. 4. However, the above-described three-dimensional information with reliability is input to the simulated SAR image generation unit 220 from the three-dimensional information with reliability estimation unit 210 . Furthermore, the imaging conditions for one or more SAR images to be analyzed are also input to the simulated SAR image generation unit 220. Then, as in the case of the reference example, the simulated SAR image generation unit 120 generates a simulated SAR image that is a complex image (complex image indicating a steady state) suitable for the imaging conditions of one or more SAR images to be analyzed. generate.
- a complex image complex image indicating a steady state
- the simulated SAR image generation unit 220 has a function of generating reliability information for each of the generated simulated SAR images. Note that the information (data) output by the simulated SAR image generation unit 220 is the same as the information output by the simulated SAR image generation unit 120. As described above, the information output by the simulated SAR image generation unit 120 is a simulated SAR image and reliability information.
- FIG. 13 is an explanatory diagram for explaining another example of improved change detection processing when an observed SAR image showing a steady state includes information other than the steady state.
- FIG. 13 corresponds to an explanatory diagram for explaining the processing of the signal processing device 200 and the change detection processing using the simulated SAR image generated by the signal processing device 200. Specifically, a part of the process shown in FIG. 13 corresponds to the process executed by the reliable three-dimensional information estimation unit 210 and the simulated SAR image generation unit 220.
- an observed SAR image stored in the SAR image storage unit 600 will be used.
- the observed SAR image group shown in FIG. 13 includes an observed SAR image A that includes information A1 other than the steady state.
- the reliable three-dimensional information estimation unit 210 reconstructs three-dimensional information of the area to be analyzed based on the observed SAR image group. Specifically, the reliable three-dimensional information estimating unit 210 generates reliable three-dimensional information (a function expressing information about how likely the reflection intensity and phase are at each point). .
- the three-dimensional information included in the reconstructed reliable three-dimensional information is influenced by information A2 other than the steady state caused by information A1 .
- the three-dimensional information with reliability estimation unit 210 calculates three-dimensional information with reliability using, for example, a posterior distribution.
- the reliable three-dimensional information estimation unit 210 uses, for example, the posterior distribution itself as reliable three-dimensional information.
- the three-dimensional information with reliability estimation unit 210 may use the parameters of the posterior distribution as three-dimensional information with reliability. Parameters of the posterior distribution include the mean value, mode, variance, and confidence interval. Further, the reliable three-dimensional information estimating unit 210 may use a candidate group of post-sampled three-dimensional information (estimated value of reflection intensity and estimated value of phase) as three-dimensional information with reliability.
- the reconstructed three-dimensional information is influenced by information A2 other than the steady state caused by information A1 .
- the information A3 other than the steady state caused by the information A2 is reflected in the simulated SAR image generated by the simulated SAR image generation unit 220.
- the coherence value of the area where halftone dots are applied is large.
- the coherence value of area A4 is small.
- the simulated SAR image generation unit 220 since the simulated SAR image generation unit 220 generates the reliability information from the three-dimensional information with reliability estimation unit 210, when the change detection process is executed, It becomes possible to avoid evaluating the coherence value for. As a result, when detecting a change from a steady state in the SAR image to be analyzed, the change can be detected with higher accuracy.
- change detection process is executed by a first change detection unit 130 or a second change detection unit 140, which will be described later.
- FIG. 14 is a flowchart showing the first aspect of signal processing performed by the signal processing device 100 shown in FIG.
- the reliable three-dimensional information reconstruction unit 110 executes three-dimensional information reconstruction processing (step S110).
- the three-dimensional information reconstruction process is a process of reconstructing three-dimensional information of a region to be analyzed based on a group of accumulated observed SAR images.
- the three-dimensional information with reliability reconstruction unit 110 calculates a reliability index value of the reconstructed three-dimensional information.
- the method for calculating the reliability index value is as described above.
- the simulated SAR image generation unit 120 executes a simulated SAR image generation process (step S120).
- the simulated SAR image generation process is a process of generating one or more simulated SAR images based on the imaging conditions of one or more SAR images to be analyzed and reconstructed three-dimensional information.
- the simulated SAR image generation unit 120 generates an image in which a simulated received signal is recorded when observed under the same photographing conditions as the respective SAR images to be analyzed.
- a simulated SAR image is generated.
- step S120 the simulated SAR image generation unit 120 also executes processing to generate reliability information.
- the method for calculating reliability information is as described above.
- FIG. 15 is a flowchart showing the three-dimensional information reconstruction process executed by the reliable three-dimensional information reconstruction unit 110.
- the reliable three-dimensional information reconstruction unit 110 derives a steering vector r ⁇ (x ⁇ ,n) from the imaging conditions of each observed SAR image in the observed SAR image group (step S111).
- the reliable three-dimensional information reconstruction unit 110 repeatedly executes the process of calculating the complex reflection intensity distribution and the process of calculating the reliability index value for each of the plurality of pixels.
- the reliable three-dimensional information reconstruction unit 110 selects one pixel for which a complex reflection intensity distribution has not yet been calculated from among the pixels in the observed SAR image group.
- the selected pixel corresponds to the selected position in the observed SAR image.
- the reliable three-dimensional information reconstruction unit 110 uses the received signal of the selected pixel (selected position) in the group of observed SAR images and the steering vector for each of the observed SAR images to calculate the complex reflection intensity distribution.
- ⁇ bg ⁇ (x ⁇ ) is calculated (step S112).
- step S112 a complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) corresponding to the pixel corresponding to the position x ⁇ is calculated.
- steps S111 and S112 are the same as the processes in steps S511 and S512 in the reference example shown in FIG.
- the reliable three-dimensional information reconstruction unit 110 calculates the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) at the pixel being handled using the calculation method described above (step S113). That is, the three-dimensional information with reliability reconstruction unit 110 calculates the reliability index value of the reconstructed three-dimensional information.
- the reliable three-dimensional information reconstruction unit 110 performs the processing in steps S112 and S113 until it calculates the complex reflection intensity distribution for all pixels in the observed SAR image group and calculates the reliability index value for all pixels. Execute repeatedly. That is, the reliable three-dimensional information reconstruction unit 110 performs pixel loop processing. When the complex reflection intensity distribution and reliability index values for all pixels in the observed SAR image group have been calculated, the pixel loop is exited. When exiting the pixel loop, the three-dimensional information of the target area has been reconstructed and the reliability index value has been calculated.
- the reliable three-dimensional information reconstruction unit 110 converts the calculated three-dimensional complex reflection intensity distribution into data having information on reflection intensity and phase at a three-dimensional position in a steady state, that is, The calculated reliability index value is output as three-dimensional information (step S114).
- the reliability index value to be output is the sum of the reliability index values for each pixel calculated in the process of step S113.
- FIG. 16 is a flowchart showing the simulated SAR image generation process executed by the simulated SAR image generation unit 120.
- the simulated SAR image generation unit 120 derives a steering vector r ⁇ (x ⁇ ,n) from each of the input imaging conditions of the SAR image to be analyzed (step S121). Note that the process in step S121 is the same as the process in step S521 in the reference example shown in FIG.
- the simulated SAR image generation unit 120 repeatedly executes the process of calculating a simulated complex signal and the process of calculating the reliability of the simulated complex signal for each of the shooting conditions of the SAR image to be analyzed. That is, the simulated SAR image generation unit 120 performs imaging condition loop processing.
- the simulated SAR image generation unit 120 selects one imaging condition that has not yet been used to generate a simulated SAR image from among the imaging conditions of the SAR image to be analyzed.
- the simulated SAR image generation unit 120 executes pixel loop processing.
- the simulated SAR image generation unit 120 selects one pixel for which a simulated complex signal has not yet been calculated from the pixels of the observed SAR image group corresponding to the selected imaging condition.
- the simulated SAR image generation unit 120 repeatedly executes the processes of steps S122 and S123 until it calculates the simulated complex signals and reliability information for all pixels in the observed SAR image group corresponding to the selected imaging condition.
- the pixel loop is exited.
- simulated complex signals and reliability regarding all pixels in the observed SAR image corresponding to the selected imaging condition have been calculated. That is, a simulated SAR image and reliability information representing reliability of the simulated SAR image are calculated.
- step S122 the simulated SAR image generation unit 120 uses the input complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) and the steering vector r ⁇ (x ⁇ ,n) corresponding to the selected imaging condition.
- a simulated complex signal g sim (x ⁇ ,n) at the position x ⁇ corresponding to the selected pixel is calculated.
- the simulated SAR image generation unit 120 calculates a simulated complex signal according to the above equation (3), for example.
- the simulated SAR image generation unit 120 may calculate the simulated complex signal according to a formula other than formula (3).
- step S122 is the same process as the process in step S522 in the reference example shown in FIG.
- the simulated SAR image generation unit 120 generates information ( reliability information) is calculated (step S123).
- the method for calculating reliability information is as described above.
- the simulated SAR image generation unit 120 exits the imaging condition loop after pixel loop processing is executed for all imaging conditions.
- a simulated SAR image of the target area and reliability information of each simulated SAR image are generated, corresponding to each of the input imaging conditions of the SAR image to be analyzed. There is.
- the simulated SAR image generation unit 120 After exiting the imaging condition loop, the simulated SAR image generation unit 120 generates a simulated SAR image, which is a complex image (complex image indicating a steady state) suitable for the input imaging conditions of the SAR image to be analyzed, and a simulated SAR image at each pixel.
- the reliability information is output (step S124). Note that when there are multiple imaging conditions, there are also multiple simulated SAR images and reliability information to be output.
- the signal processing device 100 outputs reliability information indicating the reliability of the simulated SAR image in addition to the simulated SAR image.
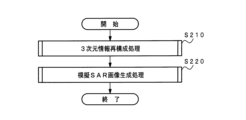
- FIG. 17 is a flowchart showing the second aspect of signal processing performed by the signal processing device 200 shown in FIG. 12.
- the reliable three-dimensional information estimation unit 210 executes three-dimensional information reconstruction processing using the calculation method already described (step S210).
- the three-dimensional information reconstruction process expresses information about how likely the reflected intensity and phase are at each point in the three-dimensional space having the azimuth direction, range direction, and elevation direction. This is a process of calculating a function (three-dimensional information with reliability).
- the three-dimensional information with reliability includes three-dimensional information and information indicating the reliability of the three-dimensional information. That is, the three-dimensional information with reliability substantially includes three-dimensional information and information indicating the reliability of the three-dimensional information.
- the simulated SAR image generation unit 220 executes simulated SAR image generation processing (step S220).
- the simulated SAR image generation process is based on the imaging conditions of one or more SAR images to be analyzed and the reconstructed three-dimensional information (substantially included in the three-dimensional information with reliability). , is a process of generating one or more simulated SAR images. Specifically, the simulated SAR image generation unit 220 selects or generates a plausible simulated complex signal.
- FIG. 18 is a flowchart showing the three-dimensional information reconstruction process executed by the reliable three-dimensional information estimation unit 210.
- the reliable three-dimensional information estimation unit 210 derives a steering vector r ⁇ (x ⁇ ,n) from the imaging conditions of each observed SAR image in the observed SAR image group (step S211). Note that the process in step S211 is the same as the process in step S511 in the reference example shown in FIG.
- the three-dimensional information with reliability estimation unit 210 repeatedly executes the process of calculating three-dimensional information with reliability for each of the plurality of pixels.
- the reliable three-dimensional information estimating unit 210 selects one pixel for which the complex reflection intensity distribution has not yet been calculated from among the pixels in the observed SAR image group.
- the selected pixel corresponds to the selected position in the observed SAR image.
- the reliable three-dimensional information estimation unit 210 estimates how likely the reflected intensity and phase are, based on the received signal of the selected pixel (selected position) in the observed SAR image group.
- a function expressing information, that is, three-dimensional information with reliability is estimated (step S212).
- the reliable three-dimensional information estimation unit 210 repeatedly executes the process of step S212 until it calculates the complex reflection intensity distribution for all pixels in the observed SAR image group. That is, the reliable three-dimensional information estimation unit 210 performs pixel loop processing. When reliable three-dimensional information regarding all pixels in the observed SAR image group has been calculated, the pixel loop is exited. When exiting the pixel loop, reliable three-dimensional information of the target area has been generated.
- the reliable three-dimensional information estimation unit 210 After exiting the pixel loop, the reliable three-dimensional information estimation unit 210 outputs reliable three-dimensional information (step S214).
- FIG. 19 is a flowchart showing the simulated SAR image generation process executed by the simulated SAR image generation unit 220.
- the simulated SAR image generation unit 220 derives a steering vector r ⁇ (x ⁇ ,n) from each of the input imaging conditions of the SAR image to be analyzed (step S221).
- the simulated SAR image generation unit 220 performs imaging condition loop processing.
- the imaging condition loop process the simulated SAR image generation unit 220 selects one imaging condition that has not yet been used to generate a simulated SAR image from among the imaging conditions for the SAR image to be analyzed.
- the simulated SAR image generation unit 220 performs pixel loop processing.
- the simulated SAR image generation unit 220 selects one pixel for which a simulated complex signal has not yet been calculated from the pixels of the observed SAR image group corresponding to the selected imaging condition.
- the simulated SAR image generation unit 220 estimates the plurality of simulated complex signal candidates estimated from the three-dimensional information with reliability and the likelihood of each simulated complex signal candidate, and selects or generates a plausible simulated complex signal.
- the estimation process is performed (step S222). When the estimation process is executed for all pixels in the observed SAR image group corresponding to the selected imaging condition, the pixel loop is exited.
- the photographing condition loop is exited.
- a simulated SAR image of the target area and reliability information of each simulated SAR image are generated, corresponding to each of the input imaging conditions of the SAR image to be analyzed. There is.
- the simulated SAR image generation section 220 generates the same information (data) that the simulated SAR image generation section 120 outputs.
- the simulated SAR image generation unit 220 After exiting the imaging condition loop, the simulated SAR image generation unit 220 generates a simulated SAR image, which is a complex image (complex image indicating a steady state) suitable for the input imaging conditions of the SAR image to be analyzed, and a complex image at each pixel.
- the reliability information is output (step S224). Note that when there are multiple imaging conditions, there are also multiple simulated SAR images and reliability information to be output.
- the signal processing device 200 outputs reliability information indicating the reliability of the simulated SAR image in addition to the simulated SAR image.
- FIG. 20 is a block diagram showing a configuration example of a signal processing device according to the second embodiment of the present invention.
- the signal processing device 101 shown in FIG. 20 includes a reliable three-dimensional information reconstruction section 110, a simulated SAR image generation section 120, and a first change detection section 130. Further, as shown in FIG. 20, the signal processing device 101 receives an observed SAR image from the SAR image storage unit 600.
- the functions that the reliable three-dimensional information reconstructing unit 110 and the simulated SAR image generating unit 120 in the present embodiment have are the same as those in the reliable three-dimensional information reconstructing unit 110 and the simulated SAR image generating unit 120 in the first embodiment. This function is the same as that of
- One or more SAR images to be analyzed are input to the first change detection unit 130.
- the SAR image to be analyzed includes a received signal indicating reflection intensity information and phase information.
- the first change detection unit 130 receives input of shooting conditions for one or more SAR images to be analyzed.
- the one or more imaging conditions are the same as the one or more imaging conditions input to the simulated SAR image generation unit 120.
- One or more simulated SAR images corresponding to one or more imaging conditions are inputted to the first change detection unit 130 from the simulated SAR image generation unit 120.
- reliability information for each pixel is input to the first change detection unit 130 from the simulated SAR image generation unit 120.
- the first change detection unit 130 executes change detection processing.
- the change detection process is, for example, a correlation process using phase information of the simulated SAR image and phase information of the SAR image to be analyzed.
- the first change detection unit 130 has a function of outputting a value calculated by the correlation processing as a change detection result.
- the first change detection unit 130 may compare the value calculated by the correlation process with a predetermined threshold, and output information (data) indicating the presence or absence of a change based on the comparison result as a change detection result.
- the correlation represents, for example, the degree to which the SAR image to be analyzed and the simulated SAR image are similar (hereinafter referred to as similarity degree).
- the degree of similarity is expressed, for example, by the distance between multiple images. Further, the degree of similarity may be expressed by an index other than the distance between the plurality of images. Hereinafter, the degree of similarity may be expressed as correlation.
- FIG. 21 is an explanatory diagram showing a specific example of the first change detection process executed by the first change detection unit 130.
- the reliable three-dimensional information reconstruction unit 110 receives the observed SAR images accumulated in the SAR image storage unit 600 and reconstructs three-dimensional information. Then, the reliable three-dimensional information reconstruction unit 110 outputs the reconstructed three-dimensional information.
- the imaging conditions for the SAR image to be analyzed and the reconstructed three-dimensional information are input to the simulated SAR image generation unit 120.
- the simulated SAR image generation unit 120 uses the inputted imaging conditions to generate a complex image showing a steady state according to each imaging condition, that is, a simulated SAR image.
- the first change detection unit 130 detects whether a change has occurred from a steady state between the input SAR image to be analyzed and the simulated SAR image.
- the first change detection unit 130 calculates the coherence value ⁇ (x ⁇ ) at each position x ⁇ of the SAR image to be analyzed and the simulated SAR image. As described above, if there is no change from the steady state, the calculated coherence value will be large. Furthermore, if the state has changed from the steady state, the calculated coherence value will be small.
- the first change detection unit 130 displays, for example, the coherence value ⁇ (x ⁇ ) obtained at each position x ⁇ in two dimensions. If the SAR image to be analyzed includes a portion that has changed from a steady state, the changed portion is detected as a decrease in coherence value.
- the first change detection unit 130 can also identify the change detection location in the layover area. Note that in FIG. 21, the broken line frame in the change detection result corresponds to the layover area.
- the first change detection unit 130 of the signal processing device 101 detects a change that occurs in a region in the SAR image to be analyzed by comparing the SAR image to be analyzed and the simulated SAR image.
- the first change detection unit 130 detects a change by calculating the degree of similarity between the SAR image to be analyzed and the simulated SAR image.
- the first change detection unit 130 may calculate the degree of similarity using phase information shown by the SAR image to be analyzed and phase information shown by the simulated SAR image. Further, the degree of similarity is, for example, a coherence value.
- the first change detection unit 130 also inputs reliability information, but input of reliability information is omitted in FIG. 21. That is, FIG. 21 shows processing that does not include processing based on reliability information, which will be described later.
- FIG. 22 is a flowchart showing signal processing performed by the signal processing device 101.
- the reliable three-dimensional information reconstruction unit 110 performs three-dimensional information reconstruction processing and processing for calculating the reliability index value of the reconstructed three-dimensional information, as in the first embodiment. (Step S110).
- the simulated SAR image generation unit 120 executes the simulated SAR image generation process and the process of calculating reliability information, similarly to the first embodiment (step S120).
- the first change detection unit 130 executes a first change detection process (step S130).
- the first change detection process is a process of detecting a change by performing a correlation process using phase information.
- FIG. 23 is a flowchart showing the first change detection process.
- the first change detection unit 130 performs step S132 until it detects changes in all pixels between the SAR image to be analyzed and the simulated SAR image generated under the same imaging conditions. Repeat the process (change detection process). That is, the first change detection unit 130 performs pixel loop processing.
- change detection process That is, the first change detection unit 130 performs pixel loop processing.
- the first change detection unit 130 selects one pixel whose correlation has not yet been calculated from among the pixels of the simulated SAR image. In step S132, the first change detection unit 130 calculates the correlation between the selected pixel in the simulated SAR image and the selected pixel in the SAR image to be analyzed.
- the selected pixel in the SAR image to be analyzed is a pixel at the same position as the selected pixel in the simulated SAR image.
- the first change detection unit 130 detects the complex signal g obs (x ⁇ ,n) of the selected pixel in the SAR image to be analyzed and the complex signal g obs (x ⁇ ,n) generated under the same imaging conditions as the SAR image to be analyzed.
- the correlation between the selected pixel in the simulated SAR image and the simulated complex signal g sim (x ⁇ ,n) is calculated.
- the first change detection unit 130 calculates the correlation using the phase information.
- the first change detection unit 130 uses a coherence value expressed by the following equation (4) as the correlation.
- E( ⁇ ) represents the expected value.
- the first change detection unit 130 may employ a value other than the coherence value that is calculated by correlation processing using phase information.
- the first change detection unit 130 may extract phase information from the SAR image as a real value, and perform correlation with the extracted real value. Further, the first change detection unit 130 may calculate, for example, the squared difference between the phase of the selected pixel in the SAR image to be analyzed and the phase of the selected pixel in the simulated SAR image, as the degree of similarity. .
- the first change detection unit 130 does not execute the process of step S132 for pixels with low reliability in the simulated SAR image (step S131).
- the first change detection unit 130 determines whether the reliability is low based on the reliability information input from the simulated SAR image generation unit 120. For example, the first change detection unit 130 determines that reliability is low when the value indicated by the reliability information is smaller than a predetermined threshold. That is, the first change detection unit 130 excludes pixels with low reliability represented by reliability information from the comparison target.
- the first change detection unit 130 executes the processing of steps S131 and S132 for the pixels of the simulated SAR image, the pixel loop is exited. After exiting the pixel loop, the first change detection unit 130 outputs a change detection result including the calculated correlation for each pixel (step S133).
- the first change detection unit 130 performs the first change detection process in step S130 for each input simulated SAR image.
- the signal processing device 101 of this embodiment has a configuration in which a first change detection section 130 is added to the signal processing device 100 of the first aspect of the first embodiment (see FIG. 10).
- a signal processing device that performs change detection processing similarly to this embodiment can also be configured.
- the first change detection unit 130 detects the correlation between the SAR image to be analyzed and the simulated SAR image generated under the same imaging conditions as the SAR image to be analyzed, and detects the phase difference. Calculated using the information. By referring to correlations etc. calculated using phase information, a user can easily detect changes from a steady state. Further, by the first change detection unit 130 calculating the correlation between the simulated SAR image and the SAR image to be analyzed, the user can robustly detect changes even in the layover region.
- the first change detection unit 130 does not perform change detection processing on pixels with low reliability. As a result, even if the SAR image showing the steady state includes information other than the steady state, changes from the steady state can be detected with higher accuracy.
- the first change detection unit 130 can detect the correlation between the multiple analysis target SAR images and the simulated SAR images corresponding to each change. By calculating, each change can be detected as a change from a steady state.
- the user can easily identify each change detection location and each change detection time. Can be identified.
- FIG. 24 is a block diagram showing a configuration example of a signal processing device according to the third embodiment of the present invention.
- the signal processing device 102 shown in FIG. 24 includes a reliable three-dimensional information reconstruction section 110, a simulated SAR image generation section 120, and a second change detection section 140. Further, as shown in FIG. 24, the signal processing device 102 inputs an observed SAR image from the SAR image storage unit 600.
- the functions that the reliable three-dimensional information reconstructing unit 110 and the simulated SAR image generating unit 120 in the present embodiment have are the same as those in the reliable three-dimensional information reconstructing unit 110 and the simulated SAR image generating unit 120 in the first embodiment. This function is the same as that of
- a plurality of SAR images to be analyzed are input to the second change detection unit 140.
- the SAR image to be analyzed includes a received signal indicating reflection intensity information and phase information.
- the second change detection unit 140 receives input conditions for capturing a plurality of SAR images to be analyzed. Each imaging condition is the same as each of the plurality of imaging conditions input to the simulated SAR image generation unit 120.
- a plurality of simulated SAR images corresponding to each of the plurality of imaging conditions are inputted to the second change detection unit 140 from the simulated SAR image generation unit 120.
- reliability information for each pixel is input to the second change detection unit 140 from the simulated SAR image generation unit 120.
- the second change detection unit 140 performs correlation processing using phase information for each pair of the SAR image to be analyzed and the simulated SAR image corresponding to the SAR image to be analyzed. Further, the second change detection unit 140 outputs a statistic obtained from the values calculated for each set as a change detection result.
- a statistic for example, an average value or a median value of values calculated by correlation processing using phase information can be used.
- the second change detection unit 140 may compare the statistical amount with a predetermined threshold and output information (data) indicating the presence or absence of a change based on the comparison result as a change detection result.
- FIG. 25 is a flowchart showing signal processing performed by the signal processing device 102.
- the reliable three-dimensional information reconstruction unit 110 performs three-dimensional information reconstruction processing and processing for calculating reliability index values of the reconstructed three-dimensional information, as in the first embodiment. (Step S110).
- the simulated SAR image generation unit 120 executes the simulated SAR image generation process and the process of calculating reliability information, similarly to the first embodiment (step S120).
- the second change detection unit 140 executes a second change detection process (step S140).
- the second change detection process is to perform correlation processing using phase information for each pair of the SAR image to be analyzed and the corresponding simulated SAR image, and to utilize statistics obtained from the calculated multiple correlations. This process detects changes based on
- FIG. 26 is a flowchart showing the second change detection process.
- the second change detection unit 140 executes pixel loop processing including the processing of steps S131 and S132, similarly to the second embodiment.
- the second change detection unit 140 performs pixel loop processing on all pairs of the SAR image to be analyzed and the simulated SAR image. Therefore, in this embodiment, the image correlation is calculated for all pairs of the SAR image to be analyzed and the corresponding simulated SAR image.
- the second change detection unit 140 does not execute the process of step S132 for pixels with low reliability in the simulated SAR image.
- the second change detection unit 140 calculates the statistics of the values calculated by the correlation processing of each set (step S141). Then, the second change detection unit 140 outputs a change detection result including the calculated statistics (step S142).
- the signal processing device 102 of this embodiment has a configuration in which a second change detection section 140 is added to the signal processing device 100 of the first aspect of the first embodiment (see FIG. 10).
- a second change detection section 140 is added to the signal processing device 100 of the first aspect of the first embodiment (see FIG. 10).
- change detection processing based on statistics can be performed as in the present embodiment. It is also possible to configure a signal processing device.
- the second change detection unit 140 does not perform change detection processing on pixels with low reliability. As a result, even if the SAR image showing the steady state includes information other than the steady state, changes from the steady state can be detected with higher accuracy.
- the signal processing device 101 of the second embodiment and the signal processing device 102 of the third embodiment are utilized when detecting changes that occur in urban areas without having to go there directly.
- the signal processing devices 101 and 102 can also be used to quickly detect when and where a change occurs in a regularly monitored area.
- the signal processing devices 101 and 102 can also be used to monitor military bases and cities in areas where security is a concern. This is because users of the signal processing devices 101 and 102 can quickly detect the appearance of aircraft or vehicles in the monitoring area simply by comparing the SAR image to be analyzed with the simulated SAR image.
- the three-dimensional information estimated by the reliable three-dimensional information reconstruction unit 110 using SAR tomography may be stored in a server or the like.
- the three-dimensional information is stored in a server or the like, users of the signal processing devices 100 and 102 can generate a simulated SAR image that includes the area subject to change detection. In other words, there is no need for the user to reconstruct the three-dimensional information himself.
- the output of the first change detection unit 130 is added to the machine learning, the position of the object given to the training data will be changed. It is limited to the output area of the first change detection section 130. In other words, the range of annotation is narrowed, and the cost required for learning is reduced.
- Each component in the above embodiment can be configured with one piece of hardware, but can also be configured with one piece of software. Further, each component can be configured with a plurality of pieces of hardware, and can also be configured with a plurality of pieces of software. Further, some of the components can be configured with hardware, and the other parts can be configured with software.
- Each function (each process) in the above embodiment can be realized by a computer having a processor such as a CPU (Central Processing Unit), a memory, and the like.
- a program for implementing the method (processing) in the above embodiment may be stored in a storage device (storage medium), and each function may be realized by executing the program stored in the storage device on a CPU. good.
- FIG. 27 is a block diagram showing an example of a computer having a CPU.
- a computer is implemented in a signal processing device.
- the CPU 1000 executes processing according to the program (signal processing program) stored in the storage device 1001, thereby implementing the reliable three-dimensional information reconstruction unit 110 and the reliable three-dimensional information reconstruction unit 210 in the above embodiments.
- the functions of the simulated SAR image generation sections 120 and 220, the first change detection section 130, and the second change detection section 140 are realized.
- the storage device 1001 is, for example, a non-transitory computer readable medium.
- Non-transitory computer-readable media include various types of tangible storage media. Specific examples of non-transitory computer-readable media include magnetic recording media (e.g., hard disks), magneto-optical recording media (e.g., magneto-optical disks), CD-ROMs (Compact Disc-Read Only Memory), and CD-Rs (Compact Disc-Recordable), CD-R/W (Compact Disc-ReWritable), and semiconductor memories (for example, mask ROM, PROM (Programmable ROM), EPROM (Erasable PROM), and flash ROM).
- magnetic recording media e.g., hard disks
- magneto-optical recording media e.g., magneto-optical disks
- CD-ROMs Compact Disc-Read Only Memory
- CD-Rs Compact Disc-Recordable
- CD-R/W Compact Disc-ReWritable
- semiconductor memories for example, mask
- the program may also be stored on various types of transitory computer readable medium.
- the program is supplied to the temporary computer-readable medium, for example, via a wired or wireless communication channel, ie, via an electrical signal, an optical signal, or an electromagnetic wave.
- the memory 1002 is realized by, for example, RAM (Random Access Memory), and is a storage means that temporarily stores data when the CPU 1000 executes processing. It is also conceivable that a program held in the storage device 1001 or a temporary computer-readable medium is transferred to the memory 1002, and the CPU 1000 executes processing based on the program in the memory 1002.
- RAM Random Access Memory
- a DSP Digital Signal Processor
- the CPU 1000 and the DSP may be implemented in a signal processing device.
- FIG. 28 is a block diagram showing the main parts of the signal processing device according to the present invention.
- the signal processing device 10 shown in FIG. 28 processes three-dimensional information consisting of estimated values of reflection intensity and phase at three-dimensional positions in a steady state reconstructed using observed SAR images, and the reliability of the three-dimensional information.
- Reliable three-dimensional information reconstruction means (reliable three-dimensional information reconstruction unit) 11 (in the embodiment, reliable three-dimensional information reconstruction unit) 11 (reliable three-dimensional information reconstruction unit) that generates reliable three-dimensional information including information indicating 110 or the reliable three-dimensional information estimating section 210), the three-dimensional information and the photographing conditions of the SAR image to be analyzed are used to determine a steady state suitable for the photographing conditions of the SAR image to be analyzed.
- a simulated SAR image generation unit (simulated SAR image generation unit) 12 (in the embodiment, a simulated SAR image generation unit) generates a simulated SAR image that is a complex image showing the 120, 220).
- the reliable three-dimensional information reconstructing means 11 (for example, the reliable three-dimensional information reconstructing unit 110) is configured to reconstruct the received signal and the generated three-dimensional information, for example, with respect to each of the reflection intensity and phase.
- Information indicating the reliability of the three-dimensional information is calculated by evaluating the discrepancy with the predicted signal predicted from the dimensional information.
- the reliable three-dimensional information reconstructing means 11 calculates, for example, one of the possible values of each estimated value in the generated three-dimensional information. Evaluate how likely it is.
- the simulated SAR image generation means 12 (for example, the simulated SAR image generation unit 120) performs reliability processing using, for example, statistical processing using the generated simulated SAR image and information indicating the reliability of the three-dimensional information. Generate sexual information.
- the reliable three-dimensional information reconstruction means 11 calculates, for example, the reflection intensity at each position in the three-dimensional space as the reliable three-dimensional information. and calculates a function that expresses information about what kind of value is likely as the phase and how likely it is.
- the simulated SAR image generation means 12 (for example, the simulated SAR image generation unit 220) generates a plurality of simulated complex signal candidates estimated from reliable three-dimensional information and each simulated complex signal candidate. The probability is estimated, and a plausible simulated complex signal is selected or generated as reliability information.
- the signal processing device 10 includes a change detection unit (in the embodiment, a first change detection unit 130 or realized by the second change detection unit 140), and the change detection means may be configured to exclude pixels with low reliability represented by reliability information from the comparison target (FIG. 23 and step S131 in FIG. 26).
- a change detection unit in the embodiment, a first change detection unit 130 or realized by the second change detection unit 140
- the change detection means may be configured to exclude pixels with low reliability represented by reliability information from the comparison target (FIG. 23 and step S131 in FIG. 26).
- the detection means may detect the change by calculating the degree of similarity between the SAR image to be analyzed and the simulated SAR image.
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Theoretical Computer Science (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Multimedia (AREA)
- Radar Systems Or Details Thereof (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024524135A JP7750405B2 (ja) | 2022-06-03 | 2022-06-03 | 信号処理装置および信号処理方法 |
| PCT/JP2022/022634 WO2023233656A1 (ja) | 2022-06-03 | 2022-06-03 | 信号処理装置および信号処理方法 |
| US18/870,699 US20250341632A1 (en) | 2022-06-03 | 2022-06-03 | Signal processing device and signal processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/022634 WO2023233656A1 (ja) | 2022-06-03 | 2022-06-03 | 信号処理装置および信号処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023233656A1 true WO2023233656A1 (ja) | 2023-12-07 |
Family
ID=89026203
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/022634 Ceased WO2023233656A1 (ja) | 2022-06-03 | 2022-06-03 | 信号処理装置および信号処理方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20250341632A1 (https=) |
| JP (1) | JP7750405B2 (https=) |
| WO (1) | WO2023233656A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4332628A1 (en) * | 2022-09-01 | 2024-03-06 | NEC Corporation | Signal processing device and signal processing method |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025042199A (ja) * | 2023-09-14 | 2025-03-27 | 株式会社東芝 | 情報処理装置、システム、方法及びプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5394151A (en) * | 1993-09-30 | 1995-02-28 | The United States Of America As Represented By The Secretary Of The Navy | Apparatus and method for producing three-dimensional images |
| JP2015094657A (ja) * | 2013-11-12 | 2015-05-18 | 三菱電機株式会社 | 合成開口レーダ信号処理装置 |
| CN110109101A (zh) * | 2019-04-04 | 2019-08-09 | 电子科技大学 | 一种基于自适应阈值的压缩感知三维sar成像方法 |
-
2022
- 2022-06-03 JP JP2024524135A patent/JP7750405B2/ja active Active
- 2022-06-03 WO PCT/JP2022/022634 patent/WO2023233656A1/ja not_active Ceased
- 2022-06-03 US US18/870,699 patent/US20250341632A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5394151A (en) * | 1993-09-30 | 1995-02-28 | The United States Of America As Represented By The Secretary Of The Navy | Apparatus and method for producing three-dimensional images |
| JP2015094657A (ja) * | 2013-11-12 | 2015-05-18 | 三菱電機株式会社 | 合成開口レーダ信号処理装置 |
| CN110109101A (zh) * | 2019-04-04 | 2019-08-09 | 电子科技大学 | 一种基于自适应阈值的压缩感知三维sar成像方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4332628A1 (en) * | 2022-09-01 | 2024-03-06 | NEC Corporation | Signal processing device and signal processing method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7750405B2 (ja) | 2025-10-07 |
| US20250341632A1 (en) | 2025-11-06 |
| JPWO2023233656A1 (https=) | 2023-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Wu et al. | Deep learning for the detection and phase unwrapping of mining-induced deformation in large-scale interferograms | |
| Esch et al. | Urban footprint processor—Fully automated processing chain generating settlement masks from global data of the TanDEM-X mission | |
| Wu et al. | Deep-learning-based phase discontinuity prediction for 2-D phase unwrapping of SAR interferograms | |
| RU2518903C2 (ru) | Идентификация и анализ устойчивых рассеивателей в последовательности изображений, полученных с помощью sar | |
| EP3540462B1 (en) | Coherence change detection techniques | |
| JP7750405B2 (ja) | 信号処理装置および信号処理方法 | |
| US20240193856A1 (en) | Signal processing device and signal processing method | |
| EP4498330B1 (en) | A system and method for classifying damaged buildings and undamaged buildings | |
| Costa et al. | A nonparametric estimator for coherent change detection: The permutational change detection | |
| US20240077605A1 (en) | Change detection device and change detection method | |
| CN120044524B (zh) | 一种基于InSAR与深度学习的地表形变监测与分类方法 | |
| US20210223389A1 (en) | Synthetic aperture radar signal analysis device, synthetic aperture radar signal analysis method, and synthetic aperture radar signal analysis program | |
| Feng et al. | Unsupervised change detection of man-made objects using coherent and incoherent features of multi-temporal SAR images | |
| Li et al. | Optimizing rapid seismic building damage assessment: Integrating enhanced radar change detection maps with variational Bayesian networks | |
| CN116047518B (zh) | 基于雷达卫星的潜在地质灾害识别方法及设备 | |
| WO2024246187A1 (en) | Point coherence estimation in interferometry | |
| WO2024150737A1 (ja) | 信号処理装置、信号処理方法及び記録媒体 | |
| CN113494912B (zh) | 基于虚拟传感器响应的交通工具的位置估计 | |
| JP7670159B2 (ja) | 信号処理システムおよび信号処理方法 | |
| US20240280689A1 (en) | Image analysis device and image analysis method | |
| Song et al. | Optimizing DEM error mitigation in multi-temporal InSAR: A detection-and-estimation strategy based on phase gradient direction consistency | |
| Gawai et al. | Literature Review on Ship Detection Methods using Satellite-borne Synthetic Aperture Radar for Maritime Surveillance. | |
| Nava et al. | A workflow to identify and monitor slow-moving landslides through spaceborne optical feature tracking | |
| Shore et al. | Automated Synthetic Aperture Radar Image Quality Assessment | |
| Haddad et al. | Gradient Descent GLRT Detector for Urban Tomographic SAR Applications |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22944936 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024524135 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18870699 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22944936 Country of ref document: EP Kind code of ref document: A1 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18870699 Country of ref document: US |