WO2023119664A1 - 機械学習プログラム、装置、及び方法 - Google Patents
機械学習プログラム、装置、及び方法 Download PDFInfo
- Publication number
- WO2023119664A1 WO2023119664A1 PCT/JP2021/048388 JP2021048388W WO2023119664A1 WO 2023119664 A1 WO2023119664 A1 WO 2023119664A1 JP 2021048388 W JP2021048388 W JP 2021048388W WO 2023119664 A1 WO2023119664 A1 WO 2023119664A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- machine learning
- region
- learning model
- threshold
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/70—Labelling scene content, e.g. deriving syntactic or semantic representations
Definitions
- the disclosed technology relates to a machine learning program, a machine learning device, and a machine learning method.
- semantic segmentation is used to divide an image into regions by object type by classifying the object type for each small area such as a pixel unit of the image.
- semantic segmentation task similarly to the above, during the operation of a system using a machine learning model, the accuracy of the machine learning model may decrease due to changes in operational data.
- a technology has been proposed in which operation data after change during system operation is assumed and prepared in advance, and training data including this operation data after change is used for training of machine learning models used in the system. ing.
- class classification is performed for each small region such as a pixel unit. Therefore, if a correct label is assigned to operation data during system operation, the operation cost will be enormous. Moreover, if it is unknown how the operational data will change during system operation, it is difficult to prepare the operational data after the change in advance and train the machine learning model.
- the disclosed technology aims to maintain the accuracy of machine learning models in semantic segmentation tasks.
- the technology disclosed herein assumes that the machine learning model has classified the first image based on values below the threshold.
- the machine learning model classifies the second image based on the value equal to or greater than the threshold, and the A classification result of a second region of the second image is labeled with respect to the first region. Accordingly, the disclosed technology generates training data and trains the machine learning model based on the training data.
- it has the effect of maintaining the accuracy of the machine learning model in semantic segmentation tasks.
- FIG. 4 is a diagram for explaining semantic segmentation
- FIG. 10 is a diagram for explaining a decrease in accuracy of a machine learning model in a semantic segmentation task
- It is a functional block diagram of a machine learning device.
- FIG. 4 is a diagram for explaining generation of synthetic pseudo-labels
- FIG. 10 is a diagram for explaining labeling of an image classified as “bad”
- It is a graph showing the transition of the accuracy of the machine learning model in operation.
- 1 is a block diagram showing a schematic configuration of a computer functioning as a machine learning device
- FIG. 6 is a flowchart illustrating an example of machine learning processing
- FIG. 11 shows a schematic diagram of an example of an image and an example of a classification result when there is a situation change
- FIG. 11 shows a schematic diagram of an example of an image and an example of a classification result when there is a situation change
- FIG. 10 is a diagram illustrating generation of training data in an example application
- FIG. 4 is a schematic diagram of an example image, a classification result, and an example of accuracy in an application example
- FIG. 4 is a schematic diagram of an example image, a classification result, and an example of accuracy in an application example;
- image features that are useful for classification are trained from images, which are training data.
- the features of images input to the system during operation may change from the features of the images used when training the machine learning model.
- the causes of this include, for example, the surface of the camera that captures the image is dirty, the position is shifted, and the sensitivity is degraded.
- the accuracy of the machine learning model decreases due to changes in the features of the images acquired during operation. For example, while the machine learning model has an accuracy rate of 99% at the beginning of operation, the accuracy decreases to an accuracy rate of 60% after a predetermined period of time from the start of operation.
- FIG. 1 shows a schematic diagram in which the boundary plane for each label and the feature amount extracted from each image are projected onto the feature amount space.
- the feature values are clearly separated for each label on the boundary plane in the feature value space.
- the dashed-dotted line in FIG. 1 When there is a change in the characteristics of the acquired image, as shown in the right diagram of FIG. , are connected (the dashed-dotted line in FIG. 1). For this reason, the classification result by the machine learning model tends to be erroneous, resulting in a decrease in accuracy.
- the feature quantity distribution in the feature quantity space is characterized in that the feature quantity distribution of the same label has one or more points with high density, and the density tends to decrease toward the outside of the distribution. Therefore, the following reference method is conceivable for automatically labeling images, which are operational data, by using this feature.
- the reference method calculates the density for each cluster of the feature amount of each label in the feature amount space before the accuracy is lowered, and records the number of clusters. Also, according to the reference method, the center of an area with a certain density or more in each cluster or the point with the highest density is recorded as the cluster center.
- the density of the feature amount of the image which is the operation data, is calculated for each point in the feature amount space.
- the reference method extracts, as clusters, feature amounts included in regions where the density is equal to or greater than a threshold in the feature amount space. Then, in the reference method, by changing the threshold, the number of extracted clusters searches for the minimum threshold that makes the number of clusters recorded before the precision drop. The reference method matches the cluster center of each cluster clustered at the minimum threshold with the cluster center recorded before the precision loss. Then, according to the reference method, the label corresponding to the cluster before the precision reduction is applied to the image corresponding to the feature quantity included in the matched cluster. This allows the labeling of the images of the operational data. The reference method uses labeled operational data to train a machine learning model, thereby suppressing the deterioration of the accuracy of the machine learning model during operation.
- Semantic segmentation is, as shown in Fig. 2, inputting an input image into a machine learning model and classifying the type of subject for each small area such as a pixel unit of the image. This is a technique for outputting the results of segmentation into regions.
- FIG. 3 shows an example of inputting images taken at night during operation in a system using a machine learning model trained using images taken outdoors in the daytime as training data. For example, the brightness change between the daytime image and the nighttime image, or the reflection of the light from the outdoor light, which is not present in the daytime image, is present in the nighttime image (broken line in FIG. 3). Machine learning models become less accurate.
- Machine learning device 10 functionally includes determination unit 11 , generation unit 12 , and training unit 16 .
- the generator 12 further includes a label generator 13 , an extended image generator 14 and a training data generator 15 .
- a machine learning model 20 is stored in a predetermined storage area of the machine learning device 10 .
- the machine learning model 20 is a machine learning model that is used to perform the task of semantic segmentation in the system in operation.
- the machine learning model 20 is composed of, for example, a DNN (Deep Neural Network) or the like.
- the determination unit 11 acquires a data set of images, which are operational data input to the machine learning device 10 .
- the determination unit 11 obtains classification results obtained by classifying each pixel using the machine learning model 20 for each of the obtained images. Then, the determination unit 11 determines whether the classification result of each image is good or bad. Specifically, the determination unit 11 calculates a classification score indicating the degree of certainty of the classification result together with the classification result.
- the classification score may be a score based on the output value of the layer one layer before the final layer, that is, the value before applying the softmax function.
- the classification score vector v (x_i,k,l) obtained from machine learning model 20 is (1) Suppose it is represented by Formula.
- the classification score S (x_i, k, l) may be the following equation (2).
- v (x_i,k,l) [s (x_i,k,l,1) ,...,s (x_i,k,l,N) ] ...
- the determination unit 11 calculates the average classification score for all pixels of the image. If the average value is equal to or greater than the threshold value, the determination unit 11 determines the classification result of the image as "good", and if the average value is less than the threshold value, determines the classification result of the image as "bad". As a result, it is possible to determine whether the accuracy of the machine learning model 20 has deteriorated during operation without teaching data.
- An image classified as "bad” is an example of the "first image” of the disclosed technique
- an image classified as "good” is an example of the "second image” of the disclosed technique. be.
- the generating unit 12 generates training data for re-learning the machine learning model 20.
- Each of the label generation unit 13, the extended image generation unit 14, and the training data generation unit 15 will be described in detail below.
- the label generating unit 13 generates a synthetic pseudo label using the classification result of the images shot in the same shooting location and shooting direction among the images classified as "good". do. Specifically, as shown in FIG. 6, the label generation unit 13 generates a classification score vector v (x_i , k, l) are used to generate a synthetic pseudo-label c (k, l) for the pixel (k, l ) as shown in the following equation (3).
- the label generation unit 13 creates a label corresponding to the class that maximizes the sum of the probabilities for each element of the classification score vector, that is, for each class. Generate as a composite pseudo-label c (k, l) of (k, l).
- the extended image generation unit 14 generates an extended image by extending the image of the operational data, as shown in C of FIG.
- a conventionally known method may be adopted as the method of generating the extended image.
- the extended image generation unit 14 may generate an extended image by alpha blending an image classified as "good” and an image classified as "poor". It should be noted that, when the extended image generation unit 14 generates an extended image by synthesizing two or more images, the extended image generation unit 14 uses images shot at the same shooting location and shooting direction.
- the training data generation unit 15 generates training data by labeling each pixel with the classification result of the pixel for the image classified as "good”. Further, the training data generation unit 15 generates training data by labeling each of the images classified as “bad” and the extended images with synthetic pseudo labels. Specifically, as shown in FIG. 7 , the training data generation unit 15 selects pixels (k, l) of an image classified as “bad” at the same shooting location and shooting direction as the image. , a synthetic pseudo-label c (k, l) generated from images classified as “good”.
- the training data generation unit 15 assigns the pixel (k, l) of the extended image to the extended image, which is captured in the same shooting location and shooting direction as the original image of the extended image.
- a synthetic pseudo-label c (k, l) generated from images with a "good” result is given.
- the training unit 16 trains the machine learning model 20 using the training data generated by the generation unit 12, as shown in E of FIG. That is, the training unit 16 trains the machine learning model 20 using the training data in which the classification result of the machine learning model 20 in operation at that time is labeled as the correct label for the operational data acquired during operation. Relearn. The retrained machine learning model 20 is output and applied to the system in operation.
- Fig. 8 schematically shows the relationship between the elapsed time during operation and the accuracy of the machine learning model.
- the solid line represents the transition of accuracy when the classification result obtained during operation is correct
- the dashed line represents the transition of accuracy when the classification result obtained during operation is not correct.
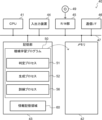
- the machine learning device 10 may be realized, for example, by the computer 40 shown in FIG.
- the computer 40 includes a CPU (Central Processing Unit) 41 , a memory 42 as a temporary storage area, and a non-volatile storage section 43 .
- the computer 40 also includes an input/output device 44 such as an input unit and a display unit, and an R/W (Read/Write) unit 45 that controls reading and writing of data to/from a storage medium 49 .
- the computer 40 also has a communication I/F (Interface) 46 connected to a network such as the Internet.
- the CPU 41 , memory 42 , storage unit 43 , input/output device 44 , R/W unit 45 and communication I/F 46 are connected to each other via bus 47 .
- the storage unit 43 may be implemented by a HDD (Hard Disk Drive), SSD (Solid State Drive), flash memory, or the like.
- a storage unit 43 as a storage medium stores a machine learning program 50 for causing the computer 40 to function as the machine learning device 10 .
- Machine learning program 50 has determination process 51 , generation process 52 , and training process 56 .
- the storage unit 43 also has an information storage area 60 in which information forming the machine learning model 20 is stored.
- the CPU 41 reads out the machine learning program 50 from the storage unit 43, develops it in the memory 42, and sequentially executes the processes of the machine learning program 50.
- the CPU 41 operates as the determination unit 11 shown in FIG. 4 by executing the determination process 51 . Further, the CPU 41 operates as the generation unit 12 shown in FIG. 4 by executing the generation process 52 . Further, the CPU 41 operates as the training section 16 shown in FIG. 4 by executing the training process 56 .
- the CPU 41 also reads information from the information storage area 60 and develops the machine learning model 20 in the memory 42 . Thereby, the computer 40 executing the machine learning program 50 functions as the machine learning device 10 . Note that the CPU 41 that executes the program is hardware.
- the functions realized by the machine learning program 50 can also be realized by, for example, a semiconductor integrated circuit, more specifically, an ASIC (Application Specific Integrated Circuit), a GPU (Graphics Processing Unit), or the like.
- a semiconductor integrated circuit more specifically, an ASIC (Application Specific Integrated Circuit), a GPU (Graphics Processing Unit), or the like.
- a machine learning model 20 used in a system in operation is stored in the machine learning device 10 , and a data set of images, which is operational data, is input to the machine learning device 10 . Then, when re-learning of the machine learning model 20 is instructed, the machine learning process shown in FIG. 10 is executed in the machine learning device 10 .
- the machine learning process is an example of the machine learning method of technology disclosed herein.
- step S ⁇ b>11 the determination unit 11 acquires an image data set, which is operational data input to the machine learning device 10 . Then, the determination unit 11 obtains classification results of classifying each pixel using the machine learning model 20 for each of the obtained images.
- step S12 the determination unit 11 calculates the average value of the classification scores indicating the certainty of the classification result of each pixel for all pixels of the image, and the classification result of the image whose average value is equal to or greater than the threshold value is classified as " "Good", and the classification result of an image whose average value is less than the threshold value is determined as "Bad".
- step S13 the label generation unit 13 generates a composite pseudo label using the classification results of the images shot in the same shooting location and shooting direction among the images classified as "good”.
- step S14 the extended image generation unit 14 generates an extended image by extending the image of the operational data.
- step S16 the training data generation unit 15 generates training data by labeling each pixel with the classification result of the pixel for the image classified as "good”. Also, the training data generation unit 15 generates training data by labeling each of the images classified as “bad” and the extended images with synthetic pseudo labels.
- step S17 the training unit 16 uses the training data generated by the generation unit 12 to train the machine learning model 20. Then the machine learning process ends.
- the machine learning device determines whether the classification result is good or bad based on the classification score of the classification result when semantic segmentation is performed on the image, which is the operational data, using the machine learning model. do.
- the machine learning device provides training data labeled with the classification result of each pixel of the image whose classification result is "good” corresponding to each pixel of the image whose classification result is determined to be "bad”. Generate and train a machine learning model based on the generated training data. This allows the accuracy of the machine learning model to be maintained while controlling operational costs in the task of semantic segmentation.
- a machine learning model trained by the machine learning device is applied to a system for detecting an increase in river water.
- the task of this application example is to perform semantic segmentation on an image of a river, and determine whether or not the water level is rising based on the area classified as the river (water surface).
- out of the 15 photographing locations 8 non-flooded locations and 7 flooded locations were photographed at intervals of 10 to 20 minutes for 4 days as operational data. I will explain the result of using and verifying.
- CPNet reference document 1 was used as an initial machine learning model as a verification condition.
- grayscaling, flipping, and random erasing were applied to the method of generating the extended image.
- the machine learning model is run using images for the previous 4 hours (approximately 150 to 250 images) and a portion of the training data (300 images) used when training the initial machine learning model. It was trained by fine-tuning and re-learned.
- fine tuning the initial value of the learning rate was set to 0.00001, and the number of epochs was set to 500.
- the time required for the above fine tuning is less than 10 minutes for one GPU.
- FIG. 11 and 12 are schematic diagrams of an example of an image and an example of a classification result when images shot at the same shooting location and in the same shooting direction have different shooting times, that is, when there is a situation change between the two images. show.
- the upper part of FIG. 11 is an example of an image taken in a time zone around 18:00 when it is still bright.
- the lower part of FIG. 11 is an example of an image taken in a time period when the sun has set and it has become dark.
- FIG. 11 and 12 are schematic diagrams of an example of an image and an example of a classification result when images shot at the same shooting location and in the same shooting direction have different shooting times, that is, when there is a situation change between the two images. show.
- the upper part of FIG. 11 is an example of an image taken in a time zone around 18:00 when it is still bright.
- the lower part of FIG. 11 is an example of an image taken in a time period when the sun has set and it has become dark.
- the classification score decreases as the situation changes, and a decrease in accuracy of the machine learning model can be detected without using correct labels.
- a synthetic pseudo-label is generated from the classification result determined to be "good”, and the generated synthetic pseudo-label is applied to the image and the extended image whose classification result is determined to be "bad".
- Labeled and generated training data. 14 and 15 schematically show examples of images, classification results, and accuracy in this case.
- FIG. 14 is an example of an image taken around 18:00 when it is still bright
- FIG. 15 is an example of an image taken at night.
- Accuracy represents the average accuracy rate of classification results for the class "water surface”.
- Fig. 14 for images in bright time zones, both the classification results of the machine learning model before relearning and the classification results of the machine learning model after relearning using the application example maintain high accuracy. are doing.
- the accuracy of the classification result of the machine learning model before re-learning is remarkably lowered.
- the classification result by the machine learning model after re-learning by the application example maintains high accuracy.
- the application example can maintain the accuracy of the machine learning model without incurring operational costs such as manual assignment of correct labels, even when there is a change in the situation during operation.
- class classification is not limited to pixel units.
- the classification may be performed in units of small areas such as 2 pixels ⁇ 2 pixels, 3 pixels ⁇ 3 pixels, or the like.
- the machine learning device may determine pass/fail for each class classification unit. In this case, one image has an area classified as "good” and an area classified as "bad". Also, in this case, the machine learning device does not generate synthetic pseudo labels for each image, but for each region with a "good” classification result. Then, in each image, the machine learning device assigns a synthetic pseudo-label generated from the region classified as "good” corresponding to the position of the region classified as "poor” in each image. may In addition, the machine learning device may assign the classification result of the region as a label to the region with the classification result of "good” in each image.
- the present invention is not limited to this.
- the program according to the technology disclosed herein can also be provided in a form stored in a storage medium such as a CD-ROM, DVD-ROM, USB memory, or the like.
- machine learning device 11 determination unit 12 generation unit 13 label generation unit 14 extended image generation unit 15 training data generation unit 16 training unit 20 machine learning model 40 computer 41 CPU 42 memory 43 storage unit 44 input/output device 45 R/W unit 46 communication I/F 47 bus 49 storage medium 50 machine learning program 51 determination process 52 generation process 56 training process 60 information storage area
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Computing Systems (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computational Linguistics (AREA)
- Image Analysis (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023569026A JP7652295B2 (ja) | 2021-12-24 | 2021-12-24 | 機械学習プログラム、装置、及び方法 |
| PCT/JP2021/048388 WO2023119664A1 (ja) | 2021-12-24 | 2021-12-24 | 機械学習プログラム、装置、及び方法 |
| US18/664,416 US20240296660A1 (en) | 2021-12-24 | 2024-05-15 | Computer-readable recording medium storing machine learning program, machine learning apparatus, and machine learning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/048388 WO2023119664A1 (ja) | 2021-12-24 | 2021-12-24 | 機械学習プログラム、装置、及び方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/664,416 Continuation US20240296660A1 (en) | 2021-12-24 | 2024-05-15 | Computer-readable recording medium storing machine learning program, machine learning apparatus, and machine learning method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023119664A1 true WO2023119664A1 (ja) | 2023-06-29 |
Family
ID=86901722
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/048388 Ceased WO2023119664A1 (ja) | 2021-12-24 | 2021-12-24 | 機械学習プログラム、装置、及び方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240296660A1 (https=) |
| JP (1) | JP7652295B2 (https=) |
| WO (1) | WO2023119664A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240177341A1 (en) * | 2022-11-28 | 2024-05-30 | Fujitsu Limited | Computer-readable recording medium storing object detection program, device, and machine learning model generation method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019152948A (ja) * | 2018-03-01 | 2019-09-12 | 日本電気株式会社 | 画像判定システム、モデル更新方法およびモデル更新プログラム |
| JP2020144755A (ja) * | 2019-03-08 | 2020-09-10 | 日立オートモティブシステムズ株式会社 | 演算装置 |
| WO2020194622A1 (ja) * | 2019-03-27 | 2020-10-01 | 日本電気株式会社 | 情報処理装置、情報処理方法、及び非一時的なコンピュータ可読媒体 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109871828B (zh) * | 2019-03-15 | 2022-12-02 | 京东方科技集团股份有限公司 | 视频识别方法和识别装置、存储介质 |
| JP7407427B2 (ja) * | 2019-04-04 | 2024-01-04 | パナソニックIpマネジメント株式会社 | 情報処理方法、及び、情報処理システム |
| US10977524B2 (en) * | 2019-04-11 | 2021-04-13 | Open Text Sa Ulc | Classification with segmentation neural network for image-based content capture |
-
2021
- 2021-12-24 WO PCT/JP2021/048388 patent/WO2023119664A1/ja not_active Ceased
- 2021-12-24 JP JP2023569026A patent/JP7652295B2/ja active Active
-
2024
- 2024-05-15 US US18/664,416 patent/US20240296660A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019152948A (ja) * | 2018-03-01 | 2019-09-12 | 日本電気株式会社 | 画像判定システム、モデル更新方法およびモデル更新プログラム |
| JP2020144755A (ja) * | 2019-03-08 | 2020-09-10 | 日立オートモティブシステムズ株式会社 | 演算装置 |
| WO2020194622A1 (ja) * | 2019-03-27 | 2020-10-01 | 日本電気株式会社 | 情報処理装置、情報処理方法、及び非一時的なコンピュータ可読媒体 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240177341A1 (en) * | 2022-11-28 | 2024-05-30 | Fujitsu Limited | Computer-readable recording medium storing object detection program, device, and machine learning model generation method |
| US12573083B2 (en) * | 2022-11-28 | 2026-03-10 | Fujitsu Limited | Computer-readable recording medium storing object detection program, device, and machine learning model generation method of training object detection model to detect category and position of object |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7652295B2 (ja) | 2025-03-27 |
| JPWO2023119664A1 (https=) | 2023-06-29 |
| US20240296660A1 (en) | 2024-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102696632B1 (ko) | 객체 정보 획득 방법 및 이를 수행하는 장치 | |
| CN112308862B (zh) | 图像语义分割模型训练、分割方法、装置以及存储介质 | |
| US10733477B2 (en) | Image recognition apparatus, image recognition method, and program | |
| JP6912835B2 (ja) | 自律走行自動車のレベル4を満たすために要求されるhdマップアップデートに利用される、少なくとも一つのアダプティブロス重み付け値マップを利用したアテンションドリブン・イメージセグメンテーション学習方法及び学習装置、そしてこれを利用したテスティング方法及びテスティング装置 | |
| CN113468967A (zh) | 基于注意力机制的车道线检测方法、装置、设备及介质 | |
| CN112434599B (zh) | 一种基于噪声通道的随机遮挡恢复的行人重识别方法 | |
| CN111027493A (zh) | 一种基于深度学习多网络软融合的行人检测方法 | |
| CN107316035A (zh) | 基于深度学习神经网络的对象识别方法及装置 | |
| JP6856853B2 (ja) | 極限状況においてフォールトトレランス及びフラクチュエーションロバスト性を向上させるために、ジッタリングが起きたイメージを安定化させるプロセスで生成されたワーピングされたイメージに発生した歪曲を、ganを利用して減らすための学習方法及び学習装置、そしてそれを利用したテスト方法及びテスト装置 | |
| JP2006301847A (ja) | 顔検出方法および装置並びにプログラム | |
| CN112966647A (zh) | 一种基于逐层聚类及增强判别的行人重识别方法 | |
| US11989650B2 (en) | Saliency prioritization for image processing | |
| CN116563762A (zh) | 一种油气站火灾检测方法、系统、介质、设备及终端 | |
| US20220366676A1 (en) | Labeling device and learning device | |
| KR20220066633A (ko) | 탐지대상 이미지에서의 이상 부분 탐지 방법 및 시스템, 이의 복원 모델 학습 방법 | |
| US11875489B2 (en) | Detecting hybdrid-distance adversarial patches | |
| KR102252155B1 (ko) | 자율주행 자동차의 레벨 4를 충족시키기 위해 필요한 hd 지도와의 콜라보레이션을 지원하는 임베딩 로스 및 소프트맥스 로스를 이용하여 적어도 하나의 차선을 가지는 이미지를 세그멘테이션하는 학습 방법 및 학습 장치, 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| CN102087707A (zh) | 图像处理设备和图像处理方法 | |
| CN115115908B (zh) | 跨域目标检测模型训练方法、目标检测方法及存储介质 | |
| CN106886778A (zh) | 一种监控场景下车牌字符分割与识别方法 | |
| CN114139616A (zh) | 一种基于不确定性感知的无监督域适应目标检测方法 | |
| WO2023119664A1 (ja) | 機械学習プログラム、装置、及び方法 | |
| CN113379001A (zh) | 针对图像识别模型的处理方法及装置 | |
| CN112434730A (zh) | 一种基于GoogleNet的视频图像质量异常分类方法 | |
| CN115661535A (zh) | 一种目标去除背景恢复方法、装置和电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21969094 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023569026 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21969094 Country of ref document: EP Kind code of ref document: A1 |