WO2023105548A1 - 分類装置、分類方法、およびプログラム - Google Patents
分類装置、分類方法、およびプログラム Download PDFInfo
- Publication number
- WO2023105548A1 WO2023105548A1 PCT/JP2021/044623 JP2021044623W WO2023105548A1 WO 2023105548 A1 WO2023105548 A1 WO 2023105548A1 JP 2021044623 W JP2021044623 W JP 2021044623W WO 2023105548 A1 WO2023105548 A1 WO 2023105548A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- imaging
- image
- unit
- magnification
- classification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/25—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands
- G01N21/27—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands using photo-electric detection ; circuits for computing concentration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/698—Matching; Classification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/693—Acquisition
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/50—Chemical analysis of biological material, e.g. blood, urine; Testing involving biospecific ligand binding methods; Immunological testing
- G01N33/53—Immunoassay; Biospecific binding assay; Materials therefor
- G01N33/575—Immunoassay; Biospecific binding assay; Materials therefor for cancer
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10056—Microscopic image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30024—Cell structures in vitro; Tissue sections in vitro
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30242—Counting objects in image
Definitions
- the present invention relates to a classification device, a classification method, and a program for classifying whether cells are benign or malignant.
- a technique has been disclosed in which a sample is photographed using an imaging means such as a camera attached to a microscope, and the substance contained in the sample as a subject is analyzed using the photographed microscope image.
- Patent Literature 1 discloses a method of performing analysis for classifying an image of a sample into regions of interest and regions of non-interest during scanning of the sample using a microscope.
- Patent Document 1 in order to quickly generate a large amount of data, the image of the sample is analyzed during the sample scanning operation. Therefore, the technique of Patent Document 1 has room for improvement in terms of analysis accuracy.
- One aspect of the present invention has been made in view of the above problems, and an example of its purpose is to provide a technique for improving the accuracy of benign and malignant classification of pathological samples.
- a classification apparatus includes imaging means for imaging an image including a partial range of a pathological sample as an object, acquisition means for acquiring the image captured by the imaging means, and a classifying means for classifying whether the cells included as a subject in the captured image are benign or malignant.
- a classification method includes capturing an image including a partial range of a pathological sample as a subject; obtaining the captured image in the capturing; and classifying cells included as objects in the captured image as benign or malignant.
- a program according to one aspect of the present invention is a program for causing a computer to function as a classification device, comprising imaging means for imaging an image including a partial range of a pathological sample as an object, and It functions as acquisition means for acquiring an image, and classification means for classifying whether a cell included as a subject in the image acquired by the acquisition means is benign or malignant.
- the accuracy of benign and malignant classification of pathological samples can be improved.
- FIG. 1 is a block diagram showing the configuration of a classification device according to exemplary embodiment 1 of the present invention
- FIG. FIG. 3 is a flow diagram showing the flow of a classification method according to exemplary embodiment 1 of the present invention
- FIG. 10 is a block diagram showing the configuration of a classification device according to exemplary embodiment 2 of the present invention
- FIG. 10 is a diagram showing an example of moving the imaging range of the imaging unit by the automatic control unit according to exemplary embodiment 2 of the present invention
- FIG. 7 is a flow diagram illustrating the flow of a classification method according to exemplary embodiment 2 of the present invention
- FIG. 10 is a block diagram showing the configuration of a classification device according to exemplary embodiment 3 of the present invention
- FIG. 11 is a flow diagram illustrating the flow of a classification method according to exemplary embodiment 3 of the present invention
- FIG. 11 is an example of an image displayed on a display device in exemplary embodiment 3 of the present invention
- FIG. FIG. 12 is a block diagram showing the configuration of a classification device according to exemplary embodiment 4 of the present invention
- FIG. 12 is a flow diagram illustrating the flow of a classification method according to exemplary embodiment 4 of the present invention
- FIG. 11 is an example of an image displayed on a display device in exemplary embodiment 4 of the present invention
- FIG. It is a flowchart which shows the flow of the classification method based on the modification of this invention.
- It is a block diagram which shows an example of the hardware configuration of the classification device in each exemplary embodiment of this invention.
- FIG. 1 is a block diagram showing the configuration of a classification device 1 according to this exemplary embodiment.
- the classification device 1 is a device that acquires an image that includes a partial range of a pathological sample as a subject and classifies whether the cells included in the image as the subject are benign or malignant.
- a pathological sample is a sample that is diagnosed as benign or malignant in pathological diagnosis.
- a pathological sample also includes a sample in cytodiagnosis that classifies specimen cells contained in the sample as benign cells or malignant cells.
- the classification device 1 includes an imaging unit 11, an acquisition unit 12, and a classification unit 13.
- the image capturing unit 11, the acquiring unit 12, and the classifying unit 13 are configured to realize image capturing means, acquiring means, and classifying means, respectively, in this exemplary embodiment.
- the imaging unit 11 captures an image including a partial range of the pathological sample as a subject.
- the acquisition unit 12 acquires the image captured by the imaging unit 11 .
- the classification unit 13 classifies whether the cells included as subjects in the images acquired by the acquisition unit 12 are benign or malignant.
- a known method can be used as a method for the classification unit 13 to classify whether the cells included as the subject in the image are benign or malignant.
- the classification unit 13 receives an image including a cell as an object, and applies the image acquired by the acquisition unit 12 to a trained learning model that classifies whether the cell is benign or malignant.
- a configuration of inputting and acquiring the classification result of the learning model can be mentioned.
- the imaging unit 11 captures an image including a partial range of a pathological sample as a subject, and the acquisition unit 11 acquires the image captured by the imaging unit 11.
- a configuration including a unit 12 and a classification unit 13 for classifying whether a cell included as a subject in an image acquired by the acquisition unit 12 is benign or malignant is adopted. Therefore, according to the classification device 1 according to this exemplary embodiment, the accuracy of classification of pathological samples into benign and malignant can be improved.
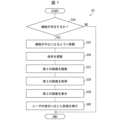
- FIG. 2 is a flow diagram showing the flow of the classification method S1 according to this exemplary embodiment.
- Step S11 the imaging unit 11 captures an image including a partial range of the pathological sample as a subject.
- Step S12 the obtaining unit 12 obtains the image captured by the imaging unit 11 in step S11.
- step S13 the classification unit 13 classifies whether the cells included as the subject in the image acquired by the acquisition unit in step S12 are benign or malignant.
- the imaging unit 11 captures an image including a partial range of the pathological sample as a subject, and in step S12, the acquisition unit 12 In step S11, the image captured by the imaging unit 11 is acquired, and in step S13, the classification unit 13 classifies whether the cells included as the subject in the image acquired by the acquisition unit in step S12 are benign or malignant. A configuration is adopted. Therefore, according to the classification method S1 according to this exemplary embodiment, the same effect as the classification device 1 can be obtained.
- the classification device 2 is a device that classifies cells contained in a pathological sample as benign or malignant. More specifically, the classification device 2 acquires a first image, which is an image including a part of the range of the pathological sample as a subject, and which is an image with a first imaging magnification. Next, when the number of cells included as a subject in the first image is a predetermined number (for example, 10) or more, the classification device 2 selects a second magnification higher than the first magnification. Acquire a second image. Then, the classification device 2 classifies whether the cells included as the subject in the acquired second image are benign or malignant.
- a predetermined number for example, 10
- the process of classifying whether the cell included as a subject in the second image is benign or malignant from the process in which the classification device 2 acquires the first image is referred to as automatic classification process.
- the classification device 2 moves the imaging range and executes the automatic classification process again.
- the first magnification is not particularly limited, it is preferably a magnification that can detect and count the number of cells contained in a pathological sample as a subject. As an example, it is 10 times in this exemplary embodiment.
- the second magnification is higher than the first magnification, and is preferably a magnification that can classify whether the cells contained as the subject in the pathological sample are benign or malignant. 40 times larger in morphology.
- FIG. 3 is a block diagram showing the configuration of the classification device 2 according to this exemplary embodiment.
- the classification device 2 includes a control unit 10, an imaging unit 11, a storage unit 20, and an output unit 22.
- the imaging unit 11 is a configuration that implements imaging means in this exemplary embodiment.
- the imaging unit 11 captures an image including a partial range of the pathological sample as a subject.
- the imaging unit 11 includes an imaging sensor, for example, and captures an image of an object included in an angle of view as a subject. Further, the imaging magnification of the imaging unit 11 is adjusted by the adjusting unit 15, which will be described later. As an example, the imaging magnification of the imaging unit is adjusted to the first magnification or the second magnification.
- the imaging unit 11 supplies the first image IP captured at the first magnification and the second image EP captured at the second magnification to the control unit 10, which will be described later.
- the storage unit 20 stores data referred to by the control unit 10, which will be described later. Examples of data stored in the storage unit 20 include a first image IP, a second image EP, coordinate information CI, cell number information NCI, and cell location information CLI. Coordinate information CI, cell number information NCI, and cell location information CLI will be described later.
- the output unit 22 is an interface that outputs data supplied from the control unit 10, which will be described later, to other connected devices.
- Examples of other connected devices include a display device for displaying images and a speaker for outputting audio.
- control unit 10 controls each component of the classification device 2 . For example, it stores data in the storage unit 20 and supplies data to the output unit 22 .
- control unit 10 also functions as an acquisition unit 12, a classification unit 13, an adjustment unit 15, a drive unit 16, an estimation unit 17, and an automatic control unit 18.
- the acquiring unit 12, the classifying unit 13, the adjusting unit 15, the driving unit 16, the estimating unit 17, and the automatic control unit 18 are, in this exemplary embodiment, respectively, acquiring means, classifying means, adjusting means, driving means, estimating means, and control means.
- the acquisition unit 12 acquires the image captured by the imaging unit 11 .
- the acquisition unit 12 acquires a first image IP and a second image EP captured by the imaging unit 11 in accordance with an instruction from the automatic control unit 18, which will be described later.
- the acquisition unit 12 stores the acquired first image IP and second image EP in the storage unit 20 .
- the classification unit 13 acquires the second image EP stored in the storage unit 20 and classifies whether the cells included as the subject in the second image EP are benign or malignant.
- the classification unit 13 stores a classification result CR indicating the result of classification in the storage unit 20 .
- the classification unit 13 performs classification processing in accordance with an instruction from an automatic control unit 18, which will be described later.
- the method by which the classification unit 13 classifies whether the cells included as the subject in the second image EP are benign or malignant is as described above.
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 .
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 to a first magnification or a second magnification in accordance with an instruction from the automatic control unit 18, which will be described later.
- the driving section 16 moves the imaging range of the imaging section 11 .
- the drive unit 16 moves the imaging range so as to comprehensively move the entire pathological sample from the center of the pathological sample in accordance with an instruction from the automatic control unit 18, which will be described later.
- the classification device 2 can start the classification process from the center of the pathological sample, which is considered to contain many cells, so that the classification process can be executed quickly.
- the estimation unit 17 estimates the number of cells included as a subject in the image.
- the estimation unit 17 detects cells included as a subject in the first image IP acquired by the acquisition unit 12 in response to an instruction from the automatic control unit 18, which will be described later, and estimates the number of detected cells. .
- the following known method can be used.
- Step 1 A regressor (regression analyzer) trained to convert the pathological image from RGB gradation to grayscale gradation according to the staining intensity (the image after this gradation conversion is referred to as a “staining intensity image”) create.
- Step 2 Using the above regressor, the image to be analyzed is converted into a staining intensity image.
- Step 3 From the staining intensity image, extract a region having a staining intensity above a certain level and a degree of circularity above a certain level.
- the estimating unit 17 receives an image including cells as a subject, detects cells included in the image, and calculates the number of detected cells by using the first image A configuration in which an IP is input and the number of cells output by the learning model is obtained is exemplified.
- the estimation unit 17 stores cell number information NCI indicating the estimated number of cells in the storage unit 20 .
- the estimating unit 17 also stores cell location information CLI indicating the location of the detected cell in the storage unit 20 .
- the estimation unit 17 sets the center of the first image IP to the center of the two-dimensional coordinate system, and generates cell position information CLI indicating the coordinates of the positions of the detected cells.
- Automatic control unit 18 controls acquisition unit 12 , classification unit 13 , adjustment unit 15 , and drive unit 16 . As an example, the automatic control unit 18 instructs each unit to execute the following automatic classification process.
- the adjustment unit 15 is caused to adjust the imaging magnification of the imaging unit 11 to the first magnification.
- the adjustment unit 15 is caused to adjust the imaging magnification of the imaging unit 11 to the second magnification, and the acquisition unit 12 2 images EP are acquired, and the classification unit 13 is made to classify whether the cells included as the subject in the second image EP are benign or malignant.
- the automatic control unit 18 instructs the driving unit 16 to move the imaging range, Execute the automatic classification process again.
- the automatic control unit 18 sets the center of the pathological sample to the center of the two-dimensional coordinate system, and generates coordinate information CI indicating the coordinates of the movement destination of the driving unit 16 . Then, the automatic control unit 18 supplies the generated coordinate information CI to the driving unit 16 to instruct the driving unit 16 to move the imaging range of the imaging unit 11 . Also, the automatic control unit 18 stores the generated coordinate information CI in the storage unit 20 .
- the automatic control section 18 moves the imaging range of the imaging section 11 will be described with reference to FIG.
- FIG. 4 is a diagram showing an example of how the automatic control unit 18 moves the imaging range of the imaging unit 11 in this exemplary embodiment.
- the diagram on the left side of FIG. 4 is a diagram of the pathological sample SA.
- the automatic control unit 18 sets the center of the pathological sample to the center CC of the two-dimensional coordinate system.
- the automatic control unit 18 moves the imaging unit 11 in a scanning order SO that comprehensively moves the entire pathological sample from the center CC of the pathological sample.
- the automatic control unit 18 first generates coordinate information CI indicating the coordinates of the center CC in order to move the imaging unit 11 to the center CC of the pathological sample SA. Next, the automatic control unit 18 supplies the generated coordinate information CI to the driving unit 16, thereby instructing the driving unit 16 so that the center of the imaging range of the imaging unit 11 becomes the center CC. Also, the automatic control unit 18 stores the generated coordinate information CI in the storage unit 20 . When the driving unit 16 moves the center of the imaging range of the imaging unit 11 to a position where the center CC is the center CC, the automatic control unit 18 executes automatic classification processing.
- the automatic control unit 18 moves the imaging range. See The automatic control unit 18 refers to the coordinate information CI and the scanning order SO, and generates coordinate information CI indicating the coordinates of the position MC1 to which the imaging unit 11 is to move next.
- the automatic control unit 18 supplies the generated coordinate information CI to the driving unit 16, thereby instructing the driving unit 16 to position the center of the imaging range of the imaging unit 11 at the position MC1 .
- the automatic control unit 18 stores the generated coordinate information CI in the storage unit 20 .
- the automatic control unit 18 executes automatic classification processing.
- the automatic control unit 18 exhaustively collects the entire pathological sample from the center CC of the pathological sample.
- the imaging unit 11 is moved in the scanning order SO to be moved.
- the automatic control unit 18 instructs the acquisition unit 12 to move the imaging range REN to the position MCN as shown on the right side of FIG. 1 image IPN is acquired and the automatic classification process is started.
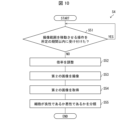
- FIG. 5 is a flow diagram showing the flow of the classification method S2 according to this exemplary embodiment.
- Step S21 the automatic control unit 18 refers to the coordinate information CI stored in the storage unit 20 and determines whether or not the imaging unit 11 has been moved to the end of the scanning order SO.
- step S21 If it is determined in step S21 that the entire sample has been imaged (step S21: Yes), the classification device 2 ends the processing of FIG.
- Step S22 When it is determined in step S21 that the entire sample has not been imaged (step S21: No), in step S22, the automatic control section 18 determines the coordinates of the movement destination of the imaging section 11 .
- the automatic control unit 18 generates coordinate information CI indicating the coordinates of the movement destination, and supplies the generated coordinate information CI to the drive unit 16 . Also, the automatic control unit 18 stores the generated coordinate information CI in the storage unit 20 .
- Step S23 the driving section 16 moves the imaging section 11 to the position of the coordinates indicated by the coordinate information CI supplied from the automatic control section 18 in step S22.
- step S24 the automatic control section 18 instructs the adjustment section 15 to adjust the imaging magnification of the imaging section 11 to the first magnification.
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 to the first magnification.
- step S25 the imaging unit 11 images the first image IP.
- Step S26 In step S ⁇ b>26 , the automatic control unit 18 instructs the acquisition unit 12 to acquire the first image IP captured by the imaging unit 11 .
- the acquisition unit 12 acquires the first image IP captured by the imaging unit 11 .
- the acquisition unit 12 stores the acquired first image IP in the storage unit 20 .
- Step S27 the automatic control unit 18 instructs the estimation unit 17 to estimate the number of cells included as a subject in the first image IP.
- the estimating unit 17 acquires the image IP stored in the storage unit 20 and detects cells included in the image IP as a subject. Then, the estimation unit 17 estimates the number of detected cells.
- the estimation unit 17 also stores cell number information NCI indicating the estimated number of cells and cell location information CLI indicating the location of the detected cells in the storage unit 20 .
- Step S28 the automatic control unit 18 acquires the cell number information NCI stored in the storage unit 20, and determines whether or not the number of cells indicated by the cell number information NCI is equal to or greater than a predetermined number.
- step S28 When it is determined in step S28 that the number of cells is less than the predetermined number (step S28: No), the classification device 2 returns to the process of step S21.
- step S29 In step S28, when it is determined that the number of cells is equal to or greater than the predetermined number (step S28: Yes), in step S29, the automatic control unit 18 instructs the adjustment unit 15 to set the imaging magnification of the imaging unit 11 to the Instruct the patient to adjust to a magnification of 2. The adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 to the second magnification.
- step S30 the imaging unit 11 captures the second image EP.
- the automatic control unit 18 acquires the cell position information CLI stored in the storage unit 20, and the position of the cell indicated by the cell position information CLI is positioned at the center of the imaging range.
- the imaging unit 11 is moved to the position indicated by the positional information via the driving unit 16 so that Then, the imaging unit 11 captures the second image EP.
- the position of each of the N cells is the center of the imaging range. It is preferable to capture a second image EP of .
- Step S31 In step S ⁇ b>31 , the automatic control unit 18 instructs the acquisition unit 12 to acquire the second image EP captured by the imaging unit 11 .
- the acquisition unit 12 acquires the second image EP captured by the imaging unit 11 .
- the acquisition unit 12 stores the acquired second image EP in the storage unit 20 .
- Step S32 the automatic control section 18 instructs the classification section 13 to execute classification processing.
- the classification unit 13 acquires the second image EP stored in the storage unit 20 and classifies whether the cells included as the subject in the second image EP are benign or malignant.
- the classification unit 13 stores a classification result CR indicating the result of classification in the storage unit 20 .
- Step S33 the automatic control unit 18 acquires the classification result CR stored in the storage unit 20, and determines whether or not the number of cells classified as malignant by the classification unit 13 is equal to or greater than a predetermined number. .
- step S33 When it is determined in step S33 that the number of cells classified as malignant is equal to or greater than the predetermined number (step S33: Yes), the classification device 2 ends the processing of FIG.
- step S33 determines whether the number of cells classified as malignant is less than the predetermined number (step S33: No). If it is determined in step S33 that the number of cells classified as malignant is less than the predetermined number (step S33: No), the classification device 2 returns to the process of step S21.
- the classification device 2 performs the first imaging when the number of cells included as a subject in the first image IP captured at the first imaging magnification is equal to or greater than a predetermined number.
- a second image EP captured at a second imaging magnification higher than the magnification is obtained.
- the classification device 2 according to the present exemplary embodiment employs a configuration for classifying whether cells included as subjects in the second image EP are benign or malignant.
- the cells included as the subject in the second captured image EP obtained by enlarging the region containing a predetermined number or more of cells are either benign or malignant.
- the accuracy of benign and malignant classification of pathological samples can be improved.
- the imaging range is automatically changed, and automatic classification processing is executed in the changed imaging range. Therefore, according to the classification device 2 according to this exemplary embodiment, the same classification result can be obtained regardless of the skill of the user using the classification device 2 .
- classification device 3 The classification device 3 according to this exemplary embodiment, in step S27 of the flow chart shown in FIG.
- a cell is detected as an object
- a second image EP imaged so that the cell included as the object in the first image IP is at the center of the imaging range is displayed. Instructions from the user received by the classification device 3 will be described later.
- FIG. 6 is a block diagram showing the configuration of the classification device 3 according to this exemplary embodiment.
- the classification device 3 includes a control section 10A, an imaging section 11, a storage section 20A, an output section 22, and an input section 23.
- the imaging unit 11 is a configuration that implements imaging means in this exemplary embodiment.
- the imaging unit 11 is as described above.
- cell location information CLI indicating the location of the detected cell in the data stored in the storage unit 20 described above is stored in association with the classification result CR.
- the output unit 22 is an interface that outputs data supplied from the control unit 10A, which will be described later, to other connected devices.
- the output unit 22 acquires image data from the control unit 10A and outputs the image data to the connected display device.
- the input unit 23 is an interface that receives operations from the user.
- the input unit 23 supplies instruction information indicating an operation received from the user to the control unit 10A.
- Control section 10A The control unit 10A controls each component of the classification device 3 .
- data is stored in the storage unit 20A and data is supplied to the output unit 22.
- FIG. 10A The control unit 10A controls each component of the classification device 3 .
- control unit 10A also functions as an acquisition unit 12, a classification unit 13, an adjustment unit 15, a drive unit 16, an estimation unit 17, an automatic control unit 18, and an input reception unit 19.
- the acquiring unit 12, the classifying unit 13, the adjusting unit 15, the driving unit 16, the estimating unit 17, the automatic control unit 18, and the input receiving unit 19 are the acquiring means, the classifying means, the adjusting means, the driving means, the driving means, It also functions as estimation means, control means, and acceptance means.
- the acquisition unit 12, adjustment unit 15, and driving unit 16 are as described above.
- the estimation unit 17 estimates the number of cells included in the image as a subject. As an example, the estimation unit 17 detects cells included as a subject in the first image IP acquired by the acquisition unit 12 in response to an instruction from the automatic control unit 18, which will be described later, and estimates the number of detected cells. . A known method can be used as the method for the estimation unit 17 to estimate the number of cells, as described above.
- the estimation unit 17 stores cell number information NCI indicating the estimated number of cells and cell location information CLI indicating the location of the detected cells in the storage unit 20A. As an example, the estimation unit 17 sets the center of the second image EP to the center of the two-dimensional coordinate system, and generates cell position information CLI indicating the coordinates of the positions of the detected cells.
- the classification unit 13 acquires the second image EP stored in the storage unit 20A and the cell location information CLI, and determines the cell included as the subject in the second image EP and indicated by the cell location information CLI. Cells at a location are classified as benign or malignant. As an example, the classification unit 13 performs classification processing according to an instruction from an automatic control unit 18, which will be described later. The method by which the classification unit 13 classifies whether the cell included as the subject in the second image EP is benign or malignant is as described above. The classification unit 13 associates the cell location information CLI indicating the location of the classified cells with the classification result CR indicating the result of classification, and stores them in the storage unit 20A.
- the input reception unit 19 receives instructions from the user. Specifically, the input reception unit 19 acquires the instruction information supplied from the input unit 23 and indicating the operation received from the user. The input reception unit 19 supplies the acquired instruction information to the automatic control unit 18 .
- the automatic control unit 18 instructs the drive unit 16 to Automatic display processing is performed to move the image pickup range so that the center of the image is displayed, and to display the image acquired by the acquisition unit 12 on the display device.
- the automatic control unit 18 may be configured to determine whether or not to perform automatic display processing according to the user's operation.
- the automatic control unit 18 displays a button (for example, a “detailed display” button) for accepting an instruction to display a second image EP in which any of the detected cells is included as a subject in the center of the imaging range.
- the automatic control unit 18 executes automatic display processing.
- the automatic control unit 18 refers to the cell position information CLI stored in the storage unit 20A, and drives so that the position indicated by the cell position information CLI becomes the center of the imaging range.
- the unit 16 is instructed to move the imaging unit 11 .
- the drive unit 16 moves the imaging unit 11 according to instructions from the automatic control unit 18 .
- the automatic control unit 18 instructs the adjustment unit 15 to adjust the imaging magnification to the second magnification.
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 to the second magnification according to the instruction from the automatic control unit 18 .
- the automatic control unit 18 instructs the acquisition unit 12 to acquire the second image EP.
- the acquiring unit 12 acquires the second image EP captured by the imaging unit 11 after movement and after adjusting the imaging magnification, according to an instruction from the automatic control unit 18 .
- the automatic control unit 18 causes the display device to display image data representing the second image EP via the output unit 22 .
- FIG. 7 is a flow diagram illustrating the flow of the classification method S3 according to this exemplary embodiment.
- the flow chart shown in FIG. 7 is executed after the process of step S32 in the above-described classification method S2.
- the flow chart shown in FIG. 7 is executed when it is received from the user to display the second image EP in which any of the detected cells is included as the subject in the center of the imaging range.
- step S34 the automatic control unit 18 acquires the cell number information NCI from the storage unit 20A and determines whether or not cells are present in the imaging range.
- step S34 When it is determined in step S34 that no cell exists in the imaging range (step S34: No), the classification device 3 ends the processing of FIG.
- Step S35 In step S34, if it is determined that cells exist in the imaging range (step S34: Yes), in step S35, the automatic control unit 18 refers to the cell position information CLI stored in the storage unit 20A to determine the cell position. The driving unit 16 is instructed to move the imaging range of the imaging unit 11 so that the position of the cell indicated by the information CLI becomes the center of the imaging range of the imaging unit 11 .
- step S36 the automatic control section 18 instructs the adjustment section 15 to adjust the imaging magnification of the imaging section 11 to the second magnification.
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 to the second magnification.
- Step S37 In step S ⁇ b>37 , the imaging unit 11 captures a second image EP in which cells are included as the subject in the center of the imaging range.
- Step S38 In step S ⁇ b>38 , the automatic control unit 18 instructs the acquiring unit 12 to acquire the second image EP captured by the imaging unit 11 .
- the acquisition unit 12 acquires the second image EP captured by the imaging unit 11 .
- the acquisition unit 12 stores the acquired second image EP in the storage unit 20A.
- step S39 In step S ⁇ b>38 , the automatic control unit 18 acquires the second image EP from the storage unit 20 ⁇ /b>A and causes the display device to display the acquired second image EP via the output unit 22 .
- Step S40 the automatic control unit 18 performs the automatic display processing shown in steps S35 to S39, and then executes processing according to the instruction received by the input receiving unit 19.
- the automatic control unit 18 performs automatic display processing shown in steps S35 to S39. After the display processing is performed, automatic display processing is performed according to the instruction received by the input receiving unit 19 so that another cell is positioned at the center of the imaging range.
- the automatic control unit 18 receives a button (for example, "Next” button) is superimposed and displayed. Then, when the input reception unit 19 acquires instruction information indicating that the button has been pressed, the automatic control unit 18 refers to the cell position information CLI stored in the storage unit 20A, and another cell is imaged. Perform automatic display processing so that it is displayed in the center of the range.
- a button for example, " Next” button
- the automatic control unit 18 refers to the cell position information CLI stored in the storage unit 20A, and another cell is imaged. Perform automatic display processing so that it is displayed in the center of the range.
- the instruction from the user received by the input receiving unit 19 is an instruction to perform automatic display processing so that another cell becomes the center of the imaging range every time a predetermined period elapses.
- the automatic control unit 18 performs automatic display processing so that another cell becomes the center of the imaging range every time a predetermined period elapses.
- the automatic control unit 18 changes the second image EP displayed in step S39 to include another cell as a subject in the center of the imaging range.
- a button for receiving an instruction from the user to automatically display the image EP (for example, an “automatic display” button) is superimposed and displayed. Then, when the input reception unit 19 acquires the instruction information indicating that the button has been pressed, the automatic control unit 18 refers to the cell location information CLI stored in the storage unit 20A, and confirms that a predetermined period of time has elapsed. Then, automatic display processing is performed so that another cell is positioned at the center of the imaging range.
- the automatic control unit 18 Automatic display processing is performed so that the cell is at the center of the imaging range. In other words, the automatic control unit 18 does not perform automatic display processing in which the cell classified as benign becomes the center of the imaging range.
- the automatic control unit 18 presses a button (for example, a "display only malignant cells” button) for accepting an instruction from the user to display only cells classified as malignant in the second image EP displayed in step S39. It is superimposed and displayed. Then, when the input reception unit 19 acquires instruction information indicating that the button has been pressed, the automatic control unit 18 refers to the classification result CR stored in the storage unit 20A, and the classification result CR is When indicating that the cell is classified as malignant, the cell location information CLI associated with the classification result CR is referred to. Then, the automatic control unit 18 causes the drive unit 16 to move the imaging range so that the cells classified as malignant by the classification unit 13 are at the center. Further, the automatic control unit 18 performs automatic display processing for displaying the second image EP acquired by the acquisition unit 12 on the display device.
- a button for example, a "display only malignant cells” button
- Example 1 of displayed image An example of an image displayed on the display device in this exemplary embodiment will be described with reference to FIG.
- FIG. 8 is an example of an image displayed on the display device in this exemplary embodiment.
- the drawing on the left side of FIG. 8 is a first image IP1 containing a plurality of cells as objects, and is taken at a first magnification.
- the first image IP 1 includes regions RE 1 to RE 6 each containing a plurality of cells.
- instruction information indicating that a button (for example, a "detailed display” button) that accepts an instruction to display a second image EP in which any of the detected cells is included as a subject in the center of the imaging range has been pressed. is acquired by the input reception unit 19, the automatic control unit 18 displays a second image EP in which any cell is included as a subject in the center of the imaging range.
- the automatic control unit 18 displays the second image EP at a second magnification that is larger than the first magnification.
- the diagram in the middle of FIG. 8 is the second image EP1 captured so that the cells included in the region RE1 are at the center of the imaging range.
- input of instruction information indicating that a button (for example, a "next" button) for accepting an instruction from the user to display a second image EP in which another cell is included in the center of the imaging range is accepted.
- the automatic control unit 18 displays a second image EP in which another cell is included as a subject in the center of the imaging range.
- the diagram on the right side of FIG. 8 is a second image EP2 captured so that another cell contained in the region RE2 is centered.
- the classification device 3 automatically displays the second image EP captured such that the cell included as the subject in the first image IP is at the center of the imaging range.
- a configuration is adopted. Therefore, the classification device 3 according to this exemplary embodiment can allow the user to confirm whether or not the classification result was correct.
- the cell is automatically displayed in the center of the second image EP, it is possible to facilitate confirmation work by the user.
- the classifying device 4 is a device for classifying whether cells contained in a pathological sample are benign or malignant. More specifically, the user changes the imaging range in which the classification device 4 images the pathological sample at the first imaging magnification. Then, if there is no operation to move the imaging range for a predetermined period of time, the classification device 4 acquires the second image EP at a second imaging magnification higher than the first imaging magnification. Then, the classification device 4 classifies whether the cells included as the subject in the acquired second image EP are benign or malignant.
- FIG. 9 is a block diagram showing the configuration of the classification device 4 according to this exemplary embodiment.
- the classification device 4 includes a control section 10B, an imaging section 11, a storage section 20B, an output section 22, and an input section 23.
- the imaging unit 11 is a configuration that implements imaging means in this exemplary embodiment.
- the imaging unit 11, the output unit 22, and the input unit 23 are as described above.
- the storage unit 20B stores, as an example, the above-described second image EP and classification result CR.
- control unit 10B controls each component of the classification device 4.
- FIG. As an example, data is stored in the storage unit 20B and data is supplied to the output unit 22 .
- the control unit 10B includes an acquisition unit 12, a classification unit 13, an adjustment unit 15, a drive unit 16, an automatic control unit 18, and an input reception unit 19.
- the acquisition unit 12, the classification unit 13, the adjustment unit 15, the drive unit 16, the automatic control unit 18, and the input reception unit 19 are the acquisition means, the classification means, the adjustment means, the drive means, and the control means, respectively, in this exemplary embodiment. , and reception means.
- the acquisition unit 12 and the classification unit 13 are as described above.
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 .
- the adjustment unit 15 adjusts the imaging magnification of the imaging unit 11 to a first magnification or a second magnification in accordance with an instruction from the automatic control unit 18, which will be described later.
- the driving section 16 moves the imaging range of the imaging section 11 .
- the driving section 16 moves the imaging range of the imaging section 11 according to an instruction from the automatic control section 18, which will be described later.
- the input reception unit 19 receives instructions from the user. Specifically, when the input unit 23 receives an operation to move the imaging range of the imaging unit 11 and an operation to change the imaging magnification of the imaging unit 11 from the user, the input reception unit 19 receives the Acquires instruction information indicating an operation. The input reception unit 19 supplies the acquired instruction information to the automatic control unit 18 .
- the automatic control unit 18 acquires instruction information supplied by the input reception unit 19 .
- the automatic control unit 18 causes the driving unit 16 to move the imaging range according to the instruction from the user indicated by the acquired instruction information. Further, the automatic control unit 18 causes the adjustment unit 15 to adjust the imaging magnification in accordance with the instruction from the user indicated by the acquired instruction information.
- the automatic control section 18 instructs the driving section 16 to move the imaging range. Further, when the instruction information indicates that the imaging magnification is to be adjusted from the first magnification to the second magnification, the automatic control section 18 instructs the adjustment section 15 to change the imaging magnification from the first magnification to the second magnification. Instruct to adjust the magnification.
- the automatic control unit 18 also determines whether the input reception unit 19 has received input information indicating an operation from the user from the input unit 23 within a predetermined period (eg, 10 seconds). As an example, the automatic control unit 18 acquires input information indicating that the imaging range is to be further moved from the input reception unit 19 within a predetermined period of time after acquiring input information indicating that the imaging range is to be moved. Determine whether or not
- the automatic control unit 18 causes the adjusting unit 15 to adjust the imaging magnification to the second magnification
- the acquisition unit 12 acquires the second image EP
- the classification unit 13 performs automatic classification processing for classifying whether the cells included as the subject in the second image EP are benign or malignant.
- FIG. 10 is a flow diagram showing the flow of the classification method S4 according to this exemplary embodiment.
- Step S51 the automatic control unit 18 determines whether or not an operation to move the imaging range has been received within a predetermined period.
- step S51 When it is determined in step S51 that an operation to move the imaging range has been received within the predetermined period (step S51: Yes), the classification device 4 returns to the processing of step S51.
- Step S52 On the other hand, if it is determined in step S51 that an operation to move the imaging range has not been received within the predetermined period (step S51: No), in step S52, the automatic control unit 18 instructs the adjustment unit 15 to An instruction is given to adjust the imaging magnification from the first magnification to the second magnification. In other words, when the user moves the imaging range and stops searching for cells, the automatic control unit 18 starts the process of acquiring the second image EP in the imaging range at the time of stopping.
- Step S53 the imaging unit 11 captures the second image EP.
- Step S54 In step S ⁇ b>54 , the automatic control unit 18 instructs the acquisition unit 12 to acquire the second image EP captured by the imaging unit 11 .
- the acquisition unit 12 acquires the second image EP captured by the imaging unit 11 .
- the acquisition unit 12 stores the acquired second image EP in the storage unit 20B.
- Step S55 the automatic control unit 18 instructs the classification unit 13 to execute classification processing.
- the classification unit 13 acquires the second image EP stored in the storage unit 20B, and classifies whether the cells included as the subject in the second image EP are benign or malignant.
- FIG. 11 is an example of an image displayed on the display device in this exemplary embodiment.
- the diagram on the left side of FIG. 11 is the first image IP3 showing how the user is performing an operation to change the imaging range. As shown in the diagram on the left side of FIG. 11 , the operation of changing the imaging range by the user is preferably performed with a wide imaging range. is image IP 3 of .
- the automatic control unit 18 determines that an operation to move the imaging range has not been received within a predetermined period of time while the first image IP3 is being displayed, as shown in the diagram on the right side of FIG. , the automatic control unit 18 instructs the acquiring unit 12 to acquire the second image EP3 captured by the imaging unit 11, and displays the second image EP3 on the display device.
- the classification device 4 determines that the imaging range has been changed by the user's operation, and when it is determined that the user has not changed the imaging range for a predetermined period of time, A second image EP is acquired, and cells included as subjects in the second image EP are classified as benign or malignant.
- the classification device 4 according to this exemplary embodiment classifies whether the cells detected by the user are benign or malignant according to the user's operation up to the detection of the cells. Therefore, the classification device 4 according to this exemplary embodiment can save the user effort.
- the automatic control unit 18 in the classification device 4 sends the second image EP is obtained, and the classification unit 13 classifies whether the cells included as the subject in the second image EP are benign or malignant.
- FIG. 12 is a flowchart showing the flow of the classification method S4A according to this modification.
- step S61 In step S ⁇ b>61 , the automatic control unit 18 determines whether or not an instruction to increase the imaging magnification has been received from the input receiving unit 19 .
- step S61 If it is determined in step S61 that an instruction to increase the imaging magnification has not been received (step S61: No), the classification device 4 returns to the process of step S61.
- step S52 On the other hand, if it is determined in step S61 that an instruction to increase the imaging magnification has been received (step S61: Yes), in step S62 the automatic control unit 18 instructs the adjustment unit 15 to set the imaging magnification to the first magnification. to the second magnification.
- Steps S53 to S55 The processing in which the imaging unit 11 captures the second image EP and the classification unit 13 classifies whether the cell included as the subject in the second image EP is benign or malignant is as described above.
- the classification device 4 acquires the second image EP when the user's operation of changing the imaging magnification is received, and the cells included as the subject in the second image EP are benign. classified as either malignant or malignant.
- the classification device 4 according to this modified example classifies whether the cells detected by the user are benign or malignant according to the user's operation until the cells are detected. Therefore, the classification device 4 according to this exemplary embodiment can save the user effort.
- Some or all of the functions of the classification devices 1 to 4 may be realized by hardware such as an integrated circuit (IC chip) or by software.
- the classification devices 1 to 4 are implemented, for example, by computers that execute program instructions that are software that implements each function.
- An example of such a computer (hereinafter referred to as computer C) is shown in FIG.
- Computer C comprises at least one processor C1 and at least one memory C2.
- a program P for operating the computer C as the classification devices 1 to 4 is recorded in the memory C2.
- the processor C1 reads the program P from the memory C2 and executes it, thereby implementing the functions of the classification devices 1-4.
- processor C1 for example, CPU (Central Processing Unit), GPU (Graphic Processing Unit), DSP (Digital Signal Processor), MPU (Micro Processing Unit), FPU (Floating point number Processing Unit), PPU (Physics Processing Unit) , a microcontroller, or a combination thereof.
- memory C2 for example, a flash memory, HDD (Hard Disk Drive), SSD (Solid State Drive), or a combination thereof can be used.
- the computer C may further include a RAM (Random Access Memory) for expanding the program P during execution and temporarily storing various data.
- Computer C may further include a communication interface for sending and receiving data to and from other devices.
- Computer C may further include an input/output interface for connecting input/output devices such as a keyboard, mouse, display, and printer.
- the program P can be recorded on a non-temporary tangible recording medium M that is readable by the computer C.
- a recording medium M for example, a tape, disk, card, semiconductor memory, programmable logic circuit, or the like can be used.
- the computer C can acquire the program P via such a recording medium M.
- the program P can be transmitted via a transmission medium.
- a transmission medium for example, a communication network or broadcast waves can be used.
- Computer C can also obtain program P via such a transmission medium.
- Imaging means for capturing an image including a partial range of a pathological sample as a subject; acquisition means for acquiring the image captured by the imaging means; and cells included in the image acquired by the acquisition means as a subject are benign and a classifying means for classifying as malignant or malignant.
- the accuracy of benign and malignant classification of pathological samples can be improved.
- (Appendix 2) adjusting means for adjusting the imaging magnification of the imaging means; estimating means for estimating the number of cells included as a subject in the image acquired by the acquiring means; (ii) causing the acquiring means to acquire a first image at the first magnification; (iii) causing the estimating means to estimate the number of cells contained as a subject in the first image; (iv ) if the number of cells estimated by the estimating means is equal to or greater than a predetermined number, causing the adjusting means to adjust the imaging magnification to a second magnification higher than the first magnification; and a control means for performing automatic classification processing for acquiring a second image at a magnification of , and causing the classification means to classify whether a cell contained as a subject in the second image is benign or malignant.
- the classification device 1.
- the same classification result can be obtained regardless of the skill of the user using the classification device.
- Driving means for moving an imaging range of the imaging means is further provided, and the control means, when the number of cells classified as malignant by the classification means as a result of the automatic classification process is less than a predetermined number, drives the driving means.
- the accuracy of benign and malignant classification of pathological samples can be improved.
- the process of classifying pathological samples as benign or malignant can be quickly executed.
- the control means causes the drive means to move the imaging range so that the cell detected by the estimation means is centered, and performs automatic display processing for displaying the image acquired by the acquisition means on a display device.
- Appendix 6 Further comprising receiving means for receiving an instruction from a user, the control means, after performing the automatic display process, controls another cell to be the center of the imaging range in accordance with the instruction received by the receiving means.
- the control means causes the adjusting means to set the imaging magnification to a second magnification higher than the first magnification when the receiving means has not received an instruction to move the imaging range to the driving means for a predetermined period of time. , causing the acquiring means to acquire a second image at the second magnification, and causing the classifying means to classify whether the cell contained as a subject in the second image is benign or malignant. 10. Classification device according to clause 9, for performing a classification process.
- the control means instructs the obtaining means to obtain a second magnification at the second magnification. and causing the classifying means to classify whether the cell contained as the subject in the second image is benign or malignant.
- Appendix 12 capturing an image including a part of a range of a pathological sample as a subject; acquiring the captured image in the capturing; and classifying as either malignant or malignant.
- the accuracy of benign and malignant classification of pathological samples can be improved.
- a program for causing a computer to function as a classification device comprising imaging means for capturing an image including a partial range of a pathological sample as an object, acquisition means for acquiring the image captured by the imaging means, and the acquisition.
- the accuracy of benign and malignant classification of pathological samples can be improved.
- At least one processor is provided, and the processor performs imaging processing for capturing an image including a partial range of the pathological sample as an object, acquisition processing for acquiring the image captured by the imaging processing, and acquisition by the acquisition processing.
- a classification device for classifying whether a cell included as an object in a captured image is benign or malignant.
- the classification device may further include a memory, and the memory may store a program for causing the processor to execute the -processing, the -processing, and the -processing. good. Also, this program may be recorded in a computer-readable non-temporary tangible recording medium.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Multimedia (AREA)
- Life Sciences & Earth Sciences (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Optics & Photonics (AREA)
- Mathematical Physics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Or Analysing Biological Materials (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21967056.9A EP4446403A4 (en) | 2021-12-06 | 2021-12-06 | CLASSIFICATION DEVICE, CLASSIFICATION METHOD AND PROGRAM |
| JP2023565661A JPWO2023105548A1 (https=) | 2021-12-06 | 2021-12-06 | |
| PCT/JP2021/044623 WO2023105548A1 (ja) | 2021-12-06 | 2021-12-06 | 分類装置、分類方法、およびプログラム |
| US18/714,113 US20250037488A1 (en) | 2021-12-06 | 2021-12-06 | Classification apparatus, classification method, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/044623 WO2023105548A1 (ja) | 2021-12-06 | 2021-12-06 | 分類装置、分類方法、およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023105548A1 true WO2023105548A1 (ja) | 2023-06-15 |
Family
ID=86729765
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/044623 Ceased WO2023105548A1 (ja) | 2021-12-06 | 2021-12-06 | 分類装置、分類方法、およびプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250037488A1 (https=) |
| EP (1) | EP4446403A4 (https=) |
| JP (1) | JPWO2023105548A1 (https=) |
| WO (1) | WO2023105548A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025074528A1 (ja) | 2023-10-04 | 2025-04-10 | 日本電気株式会社 | 病理診断支援装置、病理診断支援方法、およびプログラム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018072240A (ja) * | 2016-11-01 | 2018-05-10 | 株式会社日立ハイテクノロジーズ | 画像診断支援装置及びシステム、画像診断支援方法 |
| JP2021506022A (ja) * | 2017-12-07 | 2021-02-18 | ベンタナ メディカル システムズ, インコーポレイテッド | 生体画像における連帯的細胞および領域分類のための深層学習システムならびに方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019199392A1 (en) * | 2018-04-12 | 2019-10-17 | Google Llc | Augmented reality microscope for pathology with overlay of quantitative biomarker data |
-
2021
- 2021-12-06 JP JP2023565661A patent/JPWO2023105548A1/ja active Pending
- 2021-12-06 WO PCT/JP2021/044623 patent/WO2023105548A1/ja not_active Ceased
- 2021-12-06 EP EP21967056.9A patent/EP4446403A4/en active Pending
- 2021-12-06 US US18/714,113 patent/US20250037488A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018072240A (ja) * | 2016-11-01 | 2018-05-10 | 株式会社日立ハイテクノロジーズ | 画像診断支援装置及びシステム、画像診断支援方法 |
| JP2021506022A (ja) * | 2017-12-07 | 2021-02-18 | ベンタナ メディカル システムズ, インコーポレイテッド | 生体画像における連帯的細胞および領域分類のための深層学習システムならびに方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4446403A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025074528A1 (ja) | 2023-10-04 | 2025-04-10 | 日本電気株式会社 | 病理診断支援装置、病理診断支援方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023105548A1 (https=) | 2023-06-15 |
| US20250037488A1 (en) | 2025-01-30 |
| EP4446403A1 (en) | 2024-10-16 |
| EP4446403A4 (en) | 2025-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20200021738A1 (en) | Inspection apparatus method and apparatus comprising selective frame output | |
| JP3139998B2 (ja) | 外観検査装置及び方法 | |
| JP5570548B2 (ja) | 顔面肌分析装置 | |
| RU2423015C2 (ru) | Устройство обработки данных, способ обработки данных и носитель информации | |
| US10002422B2 (en) | Ultrasound image processing apparatus and medium | |
| KR102057429B1 (ko) | 결함 관찰 장치 및 결함 관찰 방법 | |
| JP6794747B2 (ja) | 医療用画像処理システム、および医療用画像処理システムの作動方法 | |
| US20140320700A1 (en) | Inspection apparatus method and apparatus comprising selective frame output | |
| KR20150061277A (ko) | 영상 촬영 장치 및 이의 영상 촬영 방법 | |
| JP2007072606A (ja) | 画像処理装置及び方法 | |
| JP2009211311A (ja) | 画像処理装置及び方法 | |
| TWI300159B (en) | Camera system | |
| JP2019160001A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP6914007B2 (ja) | 情報処理装置および情報処理方法 | |
| US20220296082A1 (en) | Surgical information processing apparatus, surgical information processing method, and surgical information processing program | |
| WO2023105548A1 (ja) | 分類装置、分類方法、およびプログラム | |
| WO2020207387A1 (zh) | 图像处理方法、装置、存储介质及电子设备 | |
| JPWO2023105548A5 (https=) | ||
| US10832070B2 (en) | Mobile terminal, image processing method, and computer-readable recording medium | |
| JP2009239348A (ja) | 撮影装置 | |
| JP2007093470A5 (https=) | ||
| JP2010282135A (ja) | 電子カメラシステム | |
| US20250148749A1 (en) | Image processing device, image processing method, and program | |
| CN118969167A (zh) | 检查报告生成方法、装置、设备及存储介质 | |
| CN106714695A (zh) | 超声扫描图像的存储方法和超声设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21967056 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18714113 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023565661 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2021967056 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021967056 Country of ref document: EP Effective date: 20240708 |