WO2023074218A1 - 情報処理装置、情報処理方法、及びコンピュータプログラム - Google Patents
情報処理装置、情報処理方法、及びコンピュータプログラム Download PDFInfo
- Publication number
- WO2023074218A1 WO2023074218A1 PCT/JP2022/035723 JP2022035723W WO2023074218A1 WO 2023074218 A1 WO2023074218 A1 WO 2023074218A1 JP 2022035723 W JP2022035723 W JP 2022035723W WO 2023074218 A1 WO2023074218 A1 WO 2023074218A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- time
- information processing
- information
- intersection
- probe
- Prior art date
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 148
- 238000004590 computer program Methods 0.000 title claims description 15
- 238000003672 processing method Methods 0.000 title claims description 8
- 239000000523 sample Substances 0.000 claims abstract description 149
- 238000000034 method Methods 0.000 claims description 64
- 238000000926 separation method Methods 0.000 claims description 11
- 230000000737 periodic effect Effects 0.000 claims description 5
- 238000004891 communication Methods 0.000 description 36
- 238000010586 diagram Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 239000000284 extract Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/127—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station
- G08G1/13—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station the indicator being in the form of a map
Definitions
- the present disclosure relates to an information processing device, an information processing method, and a computer program.
- This application claims priority based on Japanese Application No. 2021-178851 filed on November 1, 2021, and incorporates all the descriptions described in the Japanese application.
- Patent Literature 1 discloses an example of the support system.
- the system of Patent Literature 1 is an information providing system that identifies the switching cycle of a traffic light without introducing a new device.
- the traffic signal switching cycle is estimated based on vehicle data including time information and vehicle position information when the vehicle resumes running from a stopped state at an intersection.
- An information processing device includes a storage unit that stores probe information including travel positions and travel times of a plurality of probe vehicles, and based on the probe information stored in the storage unit, applied to an intersection and a control unit for executing information processing for estimating signal control information in the signal control information, wherein the signal control information includes cycle length and split of the intersection, and the information processing is performed on the intersection by the plurality of probe vehicles.
- a method is an information processing method executed by an information processing device, comprising: storing probe information including traveling positions and traveling times of a plurality of probe vehicles; and storing the stored probe information estimating signal control information being applied to the intersection based on the A first information processing for estimating the cycle length and split of the intersection using the crossing crossing time.
- a computer program stores probe information including traveling positions and traveling times of a plurality of probe vehicles, and signal control information being applied to an intersection based on the stored probe information a step of estimating a computer function as an information processing device, wherein the signal control information includes the cycle length and split of the intersection, and the information processing includes the plurality of the probes A first information process for estimating the cycle length and split of the intersection using the time of passage of the vehicle through the intersection.
- the present disclosure can be realized not only as a system and apparatus having the characteristic configuration as described above, but also as a program for causing a computer to execute such a characteristic configuration. Also, the present disclosure can be implemented as a semiconductor integrated circuit that implements part or all of the system and device.
- FIG. 1 is an overall configuration diagram of an information processing system according to this embodiment.
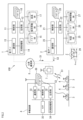
- FIG. 2 is a block diagram of a server and a vehicle-mounted device of a probe vehicle.
- FIG. 3 is a flowchart showing an example of information processing for estimating signal control information.
- FIG. 4 is an explanatory diagram showing an example of the first information processing.
- FIG. 5 is an explanatory diagram showing an example of the second information processing.
- FIG. 6 is a flowchart showing an example of third information processing.
- FIG. 7 is an explanatory diagram showing an example of the fourth information processing.
- Patent Literature 1 uses the start information of vehicles stopped at an intersection, so if there are few vehicles stopping at a red light before the intersection, it is difficult to accurately estimate the traffic light information. Therefore, there is a problem that estimation of signal information cannot be stably performed.
- an object of the present disclosure is to provide an information processing device and the like capable of stably estimating signal control information at an intersection.
- the information processing device of the present embodiment includes a storage unit that stores probe information including travel positions and travel times of a plurality of probe vehicles, and based on the probe information stored in the storage unit, applied to intersections and a control unit for executing information processing for estimating signal control information in the signal control information, wherein the signal control information includes cycle length and split of the intersection, and the information processing is performed on the intersection by the plurality of probe vehicles.
- the cycle length and split of the intersection are estimated using the crossing times of a plurality of probe vehicles. Length and split can be estimated. Therefore, it is possible to stably estimate the signal control information of the intersection.
- the first information processing is based on the probe information which is part of the probe information stored in the storage unit and includes the travel time within a predetermined period. , a process of generating first time-series data relating to a first direction passing time in a first direction of the intersection and second time-series data relating to a second direction passing time in a second direction intersecting with the first direction; and using the first direction passage time and the second direction passage time to estimate the cycle length and the split of the intersection.
- the first information processing includes the first time-series data and the second time-series data and the number of data of the second time-series data is the smallest.
- a process of obtaining a combination of a period and a second period including the first time-series data and the second time-series data and having the minimum number of data in the first time-series data may be included.
- the above information processing device it is possible to reduce the error between the first period indicating the time zone in which the right of passage is granted in the first direction and the period of the right of passage in the first direction actually applied to the intersection. The same is true for the second period. As a result, the estimated values of the cycle length and the split can be obtained with high accuracy based on the first period and the second period with little error.
- the first information processing is performed based on the first period, the second period, and a gap time between the first period and the second period, and A process of calculating the length and the split may be included.
- the cycle length can be calculated as the total value of the first period, the second period, and the gap time
- the split in the first direction can be calculated as the first period/cycle length
- the second A directional split can be calculated at a second period/cycle length.
- the signal control information includes the cycle start time of the intersection, and the information processing is performed by using the time when the plurality of probe vehicles pass through the intersection.
- the intersection cycle length and split are estimated using the intersection crossing times of a plurality of probe vehicles. can be estimated. Therefore, it is possible to stably estimate the signal control information of the intersection.
- the probe information includes the probe information including the traveling time of the probe vehicle on the execution date of the second information processing
- the second information processing includes the execution date of the probe vehicle.
- third time-series data including the passage time for the execution day in the first direction, and the passage for the execution day in the second direction intersecting the first direction, based on the probe information of the day
- Fourth time-series data including time, using the passage time for the execution day in the first direction and the passage time for the execution day in the second direction, The cycle start time of the intersection may be estimated.
- the cycle start time of the execution day of the second information processing can be obtained without being affected by daily fluctuations in the cycle start time.
- the second information processing is performed at the fourth time when the first period includes the third time-series data and the fourth time-series data and the first period includes the fourth time-series data.
- a condition that the number of series data is the minimum, and the second period includes the third time series data and the fourth time series data, and the number of data of the third time series data included in the second period is A process of obtaining the cycle start time so as to satisfy the minimum condition may be included.
- the signal control information includes a type of traffic signal control being executed at the intersection
- the information processing includes the first period, the second period, the gap time, and the , and third information processing for estimating the control type based on the cycle length.
- control type of the intersection can be estimated using the output results of the first information processing (first period, second period, gap time, and cycle length).
- the third information processing is based on the first period, the second period, and the number of periods in which the cycle length is constant, and the type is constant cycle control. and centralized control.
- the information processing device when the first period, the second period, and the cycle length are constantly constant, it is determined that the periodic control (without the intervention of the traffic control center) is performed. It can be determined to be under control (with intervention of the traffic control center).
- the third information processing may include processing for determining whether or not the type is pedestrian/vehicle separation control based on the amount of the gap time.
- the information processing device when the gap time is very large, there is a high possibility that a time zone in which only pedestrians have the right to pass is included between the first period and the second period.
- the type can be determined as pedestrian/vehicle separation control.
- the signal control information includes the signal display of the intersection, and the information processing includes the inflow direction and the outflow direction of the probe vehicle that entered the intersection at the passage time.
- a fourth information process may be included for estimating a signal appearance at the intersection based on.
- the data used in the first information processing (the time at which the probe vehicle passes through the intersection) can be used to estimate the signal appearance of the intersection.
- the fourth information processing includes only the process of adding the event of the inflow direction and the outflow direction to the passage time and the passage time when the event is a right turn. and a process of extracting an inflow path whose time period is equal to or longer than a predetermined time period.
- the above information processing device it is possible to extract an inflow road for which the time period including only the passing time in which the event is only a right turn is longer than or equal to a predetermined period of time, as an inflow road in which a right turn-only indication is adopted.
- the method according to the present embodiment is an information processing method executed by the information processing apparatus of (1) to (12) above. Therefore, the information processing method of this embodiment has the same effects as the information processing methods (1) to (12) described above.
- a program according to the present embodiment is a computer program for causing a computer to function as the information processing apparatus of (1) to (12) above. Therefore, the program of the present embodiment has the same effect as the information processing apparatus of (1) to (12) above.
- Vehicle Any vehicle that travels on the road.
- the driving system of the vehicle is not limited to the internal combustion engine, and includes electric vehicles and hybrid vehicles.
- vehicle includes both probe vehicles having an in-vehicle device capable of transmitting probe information and ordinary vehicles that do not provide probe information to the outside.
- Probe information Information including various data related to the vehicle sensed by the probe vehicle traveling on the road. Probe information is also called probe data or floating car data. The probe information includes vehicle attribute data such as identification information of the probe vehicle, traveling position, traveling speed, direction of travel, and time of occurrence of these (traveling time). “Probe vehicle”: A vehicle that senses vehicle attribute data of its own vehicle and transmits probe information including the sensed data to the outside.
- FIG. 1 is an overall configuration diagram of an information processing system 100 according to this embodiment.
- FIG. 2 is a block diagram of the first server 1, the second server 2, and the in-vehicle device 4 of the probe vehicle 3 belonging to the system 100.
- the information processing system 100 includes a first server 1, a second server 2 capable of communicating with the first server 1, and a probe vehicle 3 capable of communicating with the first server 1.
- the in-vehicle device 4 of the probe vehicle 3 includes a plurality of in-vehicle devices belonging to the in-vehicle network.
- the first server 1 is an information processing device that collects information from the probe vehicle 3 and provides information to the probe vehicle 3 .
- the first server 1 may provide information from the probe vehicle 3 to vehicles other than the probe vehicle.
- the second server 2 is an information processing device that uses the probe information provided from the first server 1 to generate information on traffic signal control.
- the first server 1 and the second server 2 may be either on-premise servers or cloud servers.
- the in-vehicle device 4 of the probe vehicle 3 is capable of wireless communication with wireless base stations 7 (for example, mobile base stations) in various places.
- the wireless base station 7 can communicate with the first server 1 via a public communication network 8 including a mobile communication core network and the Internet.
- the in-vehicle device 4 of the probe vehicle 3 wirelessly transmits a communication packet addressed to the first server 1 including uplink data to the wireless base station 7 .
- the uplink data includes probe information S1 sensed by the probe vehicle 3 and the like.
- the first server 1 transmits a communication packet addressed to the in-vehicle device 4 including downlink data to the public communication network 8 .
- the downlink data includes vehicle-oriented provision information S2 useful for assisting vehicle driving.
- the provided information S2 includes, for example, at least one of traffic congestion information, location information of various facilities such as parking lots, and traffic signal control at intersections.
- the signal information of the intersection is information representing the operation state of the signal light device 5 in a predetermined period (for example, two cycles) from the present time to the near future.
- the intersection signal information includes, for example, the following information.
- Information 1 Position and name of the intersection to be provided
- Information 2 Position and name of the inflow road to be provided
- Information 3 The lighting order of the signal lights 5 that give the right of passage to the inflow road and the direction that can be passed when the lights are lit
- Information 4 Contents of the current light color of the inflow path (which light device is lit)
- Information 5 Timing for lighting or extinguishing each lamp (either the absolute time or the number of seconds remaining from the reference time)
- the second server 2 acquires probe information S1 for a predetermined period from the first server 1, and generates signal control information S3 currently applied to the intersection based on the acquired probe information S1.
- the second server 2 transmits the generated signal control information S3 to the first server 1 .
- the signal control information S3 includes, for example, at least one of a signal control parameter being applied to the intersection, a control type of traffic signal control, and a signal indication.
- signal control parameters include cycle length, split, and cycle start time.
- Cycle length refers to the time of one cycle from one green (or red) start time of a traffic signal to the next green (or red) start time.
- Split refers to the amount of time (or the proportion of time allocated to each road) during which a green light is assigned to each road that constitutes an intersection, within the time of one cycle.
- Cycle start time refers to the time representing the cycle start point, and may be either absolute time or relative time.
- a “signal presentation” refers to a group of traffic flows that are given the right of way at the same time, or a time period in which the right of way is assigned to the group of traffic flows that pass through an intersection.
- Control type refers to the type of traffic signal control being applied at the intersection. Control types include, for example, periodic control, centralized control, and pedestrian/vehicle separation control.
- Periodical control is traffic signal control in which the traffic signal operates standalone and is not intervened by the traffic control center.
- Centralized control is traffic signal control in which a traffic signal is connected to a traffic control center via a dedicated communication line, and the traffic control center intervenes in the operation of the traffic signal according to traffic conditions.
- Pedestrian vehicle separation control determines the lighting state of the signal lamp 5 so that the time zone in which vehicles including the probe vehicle 3 have the right of way is completely separated from the time zone in which pedestrians have the right of way. Traffic signal control.
- the first server 1 When the first server 1 acquires the signal control information S3 from the second server 2, the first server 1 generates the aforementioned intersection signal information from the acquired signal control information S3.
- the first server 1 includes the generated signal information in the provided information S2.
- the probe vehicle 3 is provided with signal information of the intersection.
- the first server 1 converts the signal control information S3 acquired from the second server 2 into the provided information for the vehicle. You may transmit to the probe vehicle 3 as it is as S2.
- the first server 1 includes a control unit 11, a storage unit 12, a communication unit 13, a synchronization processing unit 14, a probe database 15, a provided information database 16, and a member database 17.
- the probe database 15, the provided information database 16, and the member database 17 are electronic data constructed in a predetermined data arrangement in the storage unit 12.
- FIG. part or all of the probe database 15, the provided information database 16, and the member database 17 may be constructed in an external storage device (not shown) connected to the first server 1.
- the control unit 11 is an arithmetic processing device including a CPU (Central Processing Unit) and a RAM (Random Access Memory).
- the control unit 11 may include an integrated circuit such as an FPGA (Field-Programmable Gate Array).
- the control unit 11 reads the computer program 18 stored in the storage unit 12 into the main memory (RAM) and executes various information processing according to the computer program 18 .
- This information processing includes processing for generating signal information, which is a type of the provided information S2, based on the signal control information S3.
- the storage unit 12 is an auxiliary storage device including non-volatile memory such as HDD (Hard Disk Drive) and SSD (Solid State Drive).
- the storage unit 12 may include a flash ROM (Read Only Memory), a USB (Universal Serial Bus) memory, an SD card, or the like.
- the communication unit 13 is a communication interface capable of communication via the public communication network 8.
- the communication unit 13 can receive the probe information S ⁇ b>1 from the radio base station 7 and can transmit the provided information S ⁇ b>2 generated by the control unit 11 to the radio base station 7 .
- the multiple types of databases include a probe database 15 , a provided information database 16 and a member database 17 .
- the probe database 15 probe information S1 received from a plurality of registered probe vehicles 3 is accumulated.
- the provided information S2 generated by the control unit 11 is temporarily recorded in the provided information database 16 .
- the member database 17 records personal information of registered members (for example, owners of probe vehicles 3), identification information of registered members' communication terminals (for example, MAC addresses), and the like.
- the synchronization processing unit 14 is a processing unit for achieving time synchronization with other communication nodes such as the in-vehicle device 4 by a predetermined synchronization method.
- the control unit 11 determines the lighting or extinguishing timing of each lamp to be included in the signal information according to the local time generated by the synchronization processing unit 14 .
- the synchronization method of the synchronization processing unit 14 is, for example, a synchronization method based on the output of a GNSS (Global Navigation Satellite System) receiver, or a synchronization method using communication frames such as NTP (Network Time Protocol) and PTP (Precision Time Protocol). etc. can be adopted.
- the second server 2 includes a control section 21 , a storage section 22 , a communication section 23 , a map database 25 , a probe database 26 and a control information database 27 .
- the map database 25, the probe database 26, and the control information database 27 are electronic data constructed in a predetermined data arrangement in the storage unit 22.
- FIG. A part or all of the map database 25 , the probe database 26 and the control information database 27 may be constructed in an external storage device (not shown) connected to the second server 2 .
- the control unit 21 is an arithmetic processing device including a CPU, a RAM, and the like.
- the control unit 21 may include an integrated circuit such as FPGA.
- the control unit 21 reads the computer program 28 stored in the storage unit 22 into the main memory (RAM) and executes various information processing according to the computer program 28 .
- This information processing includes processing for generating signal control information S3 from probe information S1.
- the storage unit 22 is an auxiliary storage device including non-volatile memory such as HDD and SSD.
- the storage unit 22 may include a flash ROM, USB memory, SD card, or the like.
- the communication unit 23 is a communication interface that allows communication via the public communication network 8 .
- the communication unit 23 can receive the probe information S1 from the first server 1 and can transmit the signal control information S3 generated by the control unit 11 to the first server 1 .
- the multiple types of databases include a map database 25 , a probe database 26 and a control information database 27 .
- the map database 25 records road map data 29 covering the country.
- the road map data 29 includes intersection data and link data.
- Intersection data is data in which intersection IDs assigned to domestic intersections are associated with intersection position information.
- Link data is data in which the following information is associated with a link ID of a specific link assigned to a domestic road.
- the road map data 29 constitutes a network corresponding to the actual road alignment and running direction of the road.
- the road map data 29 is a network in which road sections between nodes representing intersections are connected by directed links l (lowercase letter L).
- the data structure of the road map data 29 includes a directed graph in which a node n is set for each intersection and each node n is connected by a pair of directed links 1 in opposite directions. Therefore, in the case of a one-way road, node n is connected only to one-way directed link l.
- probe information S1 for a predetermined period received from the first server 1 is recorded. Specifically, the control unit 21 requests the first server 1 for the probe information S1 for a predetermined period (for example, one to two months) in the past including the current day, and the first server responds to the request. 1 is stored in the probe database 26 for a predetermined period of time.
- the signal control information S3 generated by the control section 21 is temporarily recorded in the control information database 27 .
- the control unit 21 generates intersection signal control information S3 from the probe information S1 stored in the probe database 26 and records the generated signal control information S3 in the control information database 27 .
- the control unit 21 reads the requested signal control information S ⁇ b>3 from the control information database 27 and transmits the signal control information S ⁇ b>3 to the first server 1 .
- the in-vehicle device 4 includes a control section 31 , a storage section 32 , a communication section 33 , a synchronization processing section 34 and a sensor 35 .
- the control unit 31, the storage unit 32, and the synchronization processing unit 34 are composed of one or more electronic control units (ECUs).
- the ECU, communication unit 33, and sensor 35 are communication nodes of an in-vehicle network using a predetermined communication cable as a communication path.
- the control unit 31 is an arithmetic processing device including a CPU, a RAM, and the like.
- the control unit 31 may include an integrated circuit such as FPGA.
- the storage unit 32 is an auxiliary storage device including non-volatile memory such as HDD and SSD.
- the control unit 31 reads the computer program 36 stored in the storage unit 32 into the main memory (RAM) and executes various information processing according to the computer program 36 .
- This information processing includes the generation and transmission processing of the probe information S1 described above.
- the communication unit 33 is a wireless communication device such as a gateway permanently mounted on the probe vehicle 3, or a communication terminal temporarily mounted on the probe vehicle 3 (for example, a smartphone, a tablet computer, a node personal computer, etc.) be. Note that the communication unit 33 may be mounted on a vehicle other than the probe vehicle 3 .
- the sensors 35 include a position sensor that measures the current position of the vehicle, a speed sensor that measures the speed of the vehicle, and an orientation sensor that detects the current orientation of the vehicle.
- the position sensor consists of, for example, a GNSS receiver, and measures the current position of the own vehicle almost in real time.
- the speed sensor is composed of, for example, an MR sensor that generates a pulse according to the rotation of the gear, and measures the current speed of the own vehicle almost in real time.
- the azimuth sensor is composed of, for example, a gyro sensor, and measures the current azimuth of the vehicle almost in real time.
- the synchronization processing unit 34 is a processing unit for achieving time synchronization with other communication nodes such as the first server 1 by a predetermined synchronization method.
- the control unit 31 determines the travel time (current time corresponding to the current position of the probe vehicle 3) and the like to be included in the probe information S1 according to the local time generated by the synchronization processing unit 34.
- the synchronization method of the synchronization processing unit 34 may employ, for example, a synchronization method based on the output of the GNSS receiver, a synchronization method using communication frames such as NTP and PTP, and the like.
- FIG. 3 is a flowchart showing an example of information processing for estimating the signal control information S3, which is executed by the control unit 21 of the second server 2. As shown in FIG. The information processing in FIG. 3 is executed for a predetermined intersection ID designated by the first server 1 at predetermined control intervals P (P: 15 minutes, for example).
- P predetermined control intervals
- the current control cycle is referred to as "current cycle Pi”
- the previous control cycle is referred to as "previous cycle Pi-1”.
- the subscript i is an integer that is incremented each time the control process is executed.
- the control unit 21 reads the signal control parameters estimated in the previous cycle Pi-1 from the control information database 27 (step ST11).
- the signal control parameters include the cycle length, split, and cycle start time of the intersection to be estimated.
- control unit 21 determines whether the read signal control parameters (cycle length, split, and cycle start time) of the previous cycle Pi-1 match the probe information S1 of the current cycle Pi (step ST12). This determination can be made, for example, by determining whether or not the following "trajectory of current period Pi" can occur in the following "green light time of previous period Pi-1".
- Green light time in the previous period Pi-1 Green light time in a predetermined direction of the intersection (for example, direction of main road) calculated from the signal control parameters in the previous period Pi-1
- Driving trajectory in the current period Pi Passing time to the intersection is the current time Traveling trajectory of at least one probe vehicle 3 passing through an intersection in a predetermined direction (for example, main road direction) calculated from the probe information S1 within the period Pi
- step ST12 If the determination result in step ST12 is affirmative, the control unit 11 directly adopts the signal control information S3 of the previous cycle Pi-1 as the signal control information S3 of the current cycle Pi (step ST13).
- step ST12 When the determination result of step ST12 is negative, the control unit 11 executes "first information processing" for estimating the cycle length and split (step ST14). The details of this processing will be described later. After executing the first information process, the control section 11 executes a "second information process” for estimating the cycle start time (step ST15). The details of this processing will be described later.
- control section 11 After executing the second information processing, the control section 11 executes a "third information processing" for estimating the control type of the traffic signal control being executed at the intersection (step ST16). The details of this processing will be described later. After executing the third information process, the control unit 11 updates the signal control information S3 to the information obtained in the current period Pi (step ST17), and ends the process.
- FIG. 4 is an explanatory diagram showing an example of the first information processing.
- the horizontal axis from left to right represents time
- the hollow dots in the figure mean the time when multiple probe vehicles 3 pass through the intersection.
- Intersection passing time means the time when the probe vehicle 3 passed through a predetermined point in front of the intersection.
- the intersection passing time may be abbreviated as “passing time”.
- a "stop line” drawn on the inflow road is adopted as the predetermined point before the intersection.
- the predetermined point may be a position that can be regarded as a point where the probe vehicle 3 has substantially started to enter the intersection, and may be a position slightly shifted upstream or downstream from the stop line of the inflow road. .
- a “main road” means a road extending in a first direction of two roads intersecting at an intersection.
- a “secondary road” means a road extending in a second direction different from the first direction among two roads that intersect at an intersection.
- C is the cycle length of the intersection.
- the first time-series data D11 is data obtained by arranging, in time series, intersection crossing times of a plurality of probe vehicles 3 that have passed through the main road.
- data D11 includes six time values from t1 to t3 and from t7 to t9.
- the second time-series data D12 is data obtained by arranging, in time series, the crossing crossing times of the plurality of probe vehicles 3 that have passed through the secondary road.
- data D12 includes six time values from t4 to t6 and from t10 to t12.
- T1(j) is referred to as "first period”.
- T2(k) will be referred to as a "second period”.
- the tips of the arrow in the first period T1(1) and the arrow in the second period T2(1) touch each other.
- the first information processing of this embodiment is a process of estimating the cycle length C of the intersection and the splits SP1 and SP2 using the times t1 to t12 at which the multiple probe vehicles 3 pass the intersection.
- the first information process includes a process PR1 and a process PR2.
- the processing PR1 is based on the past probe information S1 (hereinafter also referred to as “past information”) whose running time is included in a predetermined period in the past.
- This is a process of generating first time-series data D11 including t9 and second time-series data D12 including past passage times t4 to t6 and t10 to t12 in the second direction.
- the control unit 21 performs map matching between the travel position of the probe vehicle 3 and the road map data 29, and selects the stop line passage at the intersection from past information for a predetermined period (for example, two months).
- the probe information S1 in which the event occurred is extracted.
- the control unit 11 calculates times t1 to t3 and t7 to t9 at which the travel locus of the extracted probe information S1 intersects the stop line of the main road, and calculates these times t1 to t3 and t7 to t9 as data D11. is the time value to be included in .
- the control unit 11 calculates the times t4 to t6 and t10 to t12 at which the traveling locus of the extracted probe information S1 intersects the stop line of the secondary road, and calculates these times t4 to t6 and t10 to t12 as data D12. is the time value to be included in .
- the process PR2 includes a first period T1(j) that includes the first time-series data D11 and the second time-series data D12 and has the minimum number of data in the second time-series data D12, This is a process of obtaining a combination with a second period T2(k) that includes two time-series data D12 and has the minimum number of data in the first time-series data D11.
- control unit 11 increases or decreases the values of T1(j) and T2(k) by a predetermined time (for example, 1 second) within a range that satisfies the following "variable definitions" and "traffic signal control conditions". , a combination of T1(j) and T2(k) that satisfies the following "search condition" is calculated. Note that the minimum value of the number of data in D12 corresponding to T1(j) is normally zero. There is The same applies to the minimum value of the number of data in D11 corresponding to T2(k).
- GP in the variable definitions above is the gap time between T1(j) and T2(k) when neither the main road nor the minor road has right-of-way.
- the gap time GP includes, for example, an AR (all red) time period.
- the gap time GP includes a time zone in which only pedestrians have the right of passage.
- " ⁇ " is a margin considering errors such as start delay, and is set within a range of one second to several seconds according to the number of data in the time-series data D11 and D12. Also, in the above search conditions, j and k may be 3 or more.
- the first information processing includes a process of calculating the cycle length C and the splits SP1 and SP2 based on the first period T1(j) and the second period T2(k) searched in the process PR2. Specifically, when T1(j) and T2(k) are determined, for example, the control unit 21 sets the time difference from the start point of T1(1) to the start point of T1(2) as the cycle length C, This cycle length C is recorded in the control information database 27 .
- control unit 21 calculates the values of the gap time GP and the splits SP1 and SP2 by applying the cycle length C and T1(j) and T2(k) to the variable definitions. Record in the control information database 27 . Note that when T1(j) and T2(k) cannot be determined because T1(j) and T2(k) cannot be time-divided so as to satisfy the search condition, the control unit 21 outputs the result of the first information processing. is recorded in the control information database 27 as flag information representing "undefined".
- FIG. 5 is an explanatory diagram showing an example of the second information processing.
- the horizontal axis represents the time
- the hollow dots represent the passage times of the plurality of probe vehicles 3, the meaning of main roads and secondary roads, and the meaning of variables such as cycle length C are the same as in FIG. is.
- "ts" means the cycle start time.
- the third time-series data D21 is data obtained by arranging, in time series, the crossing crossing times of a plurality of probe vehicles 3 that have passed through the main road.
- the data D21 shall include six time values u1 to u3 and u7 to u9.
- the fourth time-series data D22 is data obtained by arranging, in time series, the crossing crossing times of a plurality of probe vehicles 3 that have traveled on the secondary road.
- data D22 includes six time values u4 to u6 and u10 to u12.
- T1(j) is an estimated value (unit: seconds) determined by the first information processing as the first period during which the main road has the right to pass.
- T2(k) is an estimated value (unit: seconds) determined by the first information processing as the second period during which the secondary road has the right of passage. Note that the second information processing uses T1(j) and T2(k) determined in the first information processing. Do not process information.
- the second information processing of the present embodiment is a process of estimating the cycle start time ts of an intersection using the times u1 to u12 at which a plurality of probe vehicles 3 pass through the intersection. As shown in FIG. 5, the second information processing includes processing PS1 and processing PS2.
- the processing PS1 is executed for the first direction based on the probe information S1 (hereinafter also referred to as "current day information") containing the traveling time of the probe vehicle 3 on the execution day (current day) of the second information processing.
- Third time-series data D21 including passing times u1 to u3 and u7 to u9 (for the current day) and fourth time-series data D22 including passing times u4 to u6 and u10 to u12 for execution days in the second direction
- the control unit 11 extracts the probe information S1 in which the event of passing the stop line at the intersection occurred from the information on the day by map matching between the traveling position of the probe vehicle 3 and the road map data 29 .
- control unit 11 calculates the time points u1 to u3 and u7 to u9 at which the traveling locus of the extracted probe information S1 intersects the stop line of the main road. is the time value to be included in .
- control unit 11 calculates u4 to u6 and u10 to u12 at which the travel locus of the extracted probe information S1 intersects the stop line of the secondary road, and converts these time points u4 to u6 and u10 to u12 into data D22. is the time value to be included in .
- the first period T1(j) includes the third time-series data D21 and the fourth time-series data D22, and the number of data of the fourth time-series data D22 included in the first period T1(j) is minimized.
- the second period T2(k) includes the third time-series data D21 and the fourth time-series data D22, and the number of data of the third time-series data D21 included in the second period T2(k) is minimized. This is the process of obtaining the cycle start time ts so as to satisfy the conditions.
- control unit 11 calculates the value of ts that satisfies the following “search condition” by increasing or decreasing the value of ts by a predetermined time ⁇ T (for example, 1 second). Then, the control unit 11 determines ts searched by the process PS2 as an estimated value of the cycle start time of the intersection, and records the determined estimated value in the control information database 27 . Note that the minimum value of the number of data in D22 corresponding to T1(1) is normally zero. There is The same applies to the minimum value of the number of data in D21 corresponding to T2(2).
- FIG. 6 is a flowchart showing an example of third information processing.
- the third information processing of the present embodiment is applied to intersections based on the first period T1(j), the second period T2(k), the gap time GP, and the cycle length C, which are the results of the first information processing. This is the process of estimating the control type of the traffic signal control in the middle.
- control unit 21 first determines whether or not the flag information of the first information process is "uncertain" (step ST21). If the determination result in step ST21 is negative, the control section 21 stores the values of the first period T1(j), the second period T2(k), the gap time GP, and the cycle length C in the control information database 27. (step ST22).
- the control section 21 determines whether or not the gap time GP is equal to or greater than a predetermined threshold Th (step ST23).
- the threshold Th is a time value that can correspond to the length of time when only pedestrians are allowed to pass, and is set within a range of 30 to 60 seconds, for example. If the determination result of step ST23 is negative, the control unit 21 determines whether the first period T1(j), the second period T2(k), and the cycle length C are constant for a predetermined period of time. is determined (step ST24).
- the predetermined period is set to, for example, about one week.
- step ST24 If the determination result of step ST24 is affirmative, the control unit 21 estimates that the type of control being applied to the intersection is "periodic control" (no intervention by the traffic control center) instead of pedestrian-vehicle separation control (step ST26). If the determination result in step ST24 is negative, the control unit 21 estimates that the type of control being applied to the intersection is "centralized control" (with intervention of the traffic control center) instead of pedestrian-vehicle separation control (step ST27).
- step ST23 determines whether the first period T1(j), the second period T2(k), and the cycle length C are constant for a predetermined period of time. is determined (step ST25).
- the predetermined period is set to, for example, about one week.
- step ST25 When the determination result of step ST25 is affirmative, the control unit 21 estimates that the type of control being applied to the intersection is fixed cycle (without intervention of the traffic control center) vehicle and pedestrian separation control (step ST28). When the determination result of step ST25 is negative, the control unit 21 estimates that the type of control being applied to the intersection is pedestrian/vehicle separation control of centralized control (with intervention of the traffic control center) (step ST29).
- step ST30 the control unit 21 estimates that the control type being applied to the intersection is special control (step ST30).
- Special control is traffic signal control that is neither periodic control, centralized control, nor pedestrian/vehicle separation control. Examples of special control include flashing control and push-button control by pedestrians.
- the control type of the crossing may be estimated as flashing control.
- FIG. 7 is an explanatory diagram showing an example of the fourth information processing.
- the horizontal axis represents the time
- the hollow dots mean the passage times of the plurality of probe vehicles 3, and that t1 to t12 mean the intersection passage times. be.
- L1 to L4 mean inflow paths (or inflow directions) along which the probe vehicle 3 heading for the intersection has passed.
- GS, TR, and TL are identification information representing the type of outflow direction from the intersection by the probe vehicle 3 .
- identification information "GS" means going straight, “TR” means turning right, and "TL” means turning left.
- the first time-series data D11 includes t1 to t6, which are the passage times of the inflow path L1, and t9, which is the passage time of the inflow path L3.
- the second time-series data D12 also includes t7 and t8, which are the passage times of the inflow path L2, and t11, t12, which are the passage times of the inflow path L4.
- the fourth information processing according to the modification estimates the signal appearance of the intersection based on the inflow directions L1 to L4 and the outflow directions GS, TR, and TL of the probe vehicles 3 that have flowed into the intersection from passage times t1 to t12. processing.
- the fourth information process includes process PT1 and process PT2.
- the process PT1 is a process of adding events in the inflow directions L1 to L4 and events in the outflow directions GS, TR, and TL to the past first time-series data D11 and the past second time-series data D12. Specifically, the control unit 21 determines the inflow directions L1 to L4 and the outflow directions GS, TR, and TL with respect to the intersection from the traveling trajectory of the probe vehicle 3, and adds the determination result as an event to each passing time t1 to t12. do.
- passing time t1 to which events L1 and GS are added means that the probe vehicle 3 passed through the stop line of the inflow road L1 at time t1 and went straight through the intersection.
- the passage time t2 to which the events L1 and TL are added means that the probe vehicle 3 passed the stop line of the inflow road L1 at the time t2 and made a left turn at the intersection.
- the process PT2 is a process of extracting the inflow path L1 that includes only the passage times t4 to t6 where the event in the outflow direction is a right turn TR for a predetermined period of time or more, among the inflow paths L1 to L4 heading to the intersection.
- the control unit 21 extracts the periods Ta and Tb during which the right turn TR event continues from the passage times t1 to t12 included in the first and second time-series data D11 and D12.
- the control unit 21 estimates that the signal indication at the intersection includes the right-turn-only indication.
- Condition 1 Periods Ta and Tb must be equal to or longer than a predetermined time (for example, 10 seconds).
- Condition 2 During the periods Ta and Tb, there is no passing time data for which the event is straight GS on the oncoming road.
- condition 2 is satisfied because there is no passing time in the inflow path L3 during the period Ta occurring in the inflow path L1. Therefore, if the period Ta is 10 seconds or longer, the control unit 21 determines that the right-turn only indication is adopted for the inflow path L1. On the other hand, in the period Tb occurring in the inflow path L4, the condition 2 is not satisfied because there are passage times t7 and t8 where the event is straight GS in the inflow path L2 facing the inflow path L4. Therefore, even if the period Tb is 10 seconds or longer, the control unit 21 determines that the right turn-only indication is not adopted in the inflow path L4.
- the second server 2 may execute the process of generating the signal information (provided information S2) from the signal control information S3 and the process of transmitting the signal information to the probe vehicle 3.
- one server may perform all the processes performed by the first server 1 and the second server 2 . That is, one server having both functions of the first server 1 and the second server 2 collects the probe information S1, generates the signal control information S3 from the probe information S1, and generates the signal information (provided information) from the signal control information S3. S2) and transmission of signal information to the probe vehicle 3 may be performed. Note that the one server may transmit the signal information to vehicles other than the probe vehicle 3 .
- first server information processing device
- Second server information processing device
- probe vehicle 4
- vehicle-mounted device 5
- signal lamp 7
- wireless base station 8
- public communication network 11
- control unit 12
- communication unit 14
- synchronization processing unit 15
- probe database 16
- provided information database 17
- member database 18
- computer program 21 control unit
- Communication unit 25
- map database 26
- probe database 27
- control information database 28
- computer program 29 road map data 31
- control unit 32 storage unit 33 communication unit 34
- synchronization processing unit 35
- sensor 36
- information processing system S1 probe information
- S2 provision information for vehicles
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
Abstract
情報処理装置は、複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶する記憶部と、前記記憶部に記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定する制御部と、を備え、前記第前記信号制御情報は、前記交差点のサイクル長及びスプリットを含み、前記情報処理は、前記複数のプローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む。
Description
本開示は、情報処理装置、情報処理方法、及びコンピュータプログラムに関する。
本出願は、2021年11月1日出願の日本出願第2021-178851号に基づく優先権を主張し、前記日本出願に記載された全ての記載内容を援用するものである。
本出願は、2021年11月1日出願の日本出願第2021-178851号に基づく優先権を主張し、前記日本出願に記載された全ての記載内容を援用するものである。
エネルギーロス及びCO2排出量の削減を目的として、次の青信号で通過できる速度を走行中の車両に通知し、赤信号での停止に伴う加減速を抑制するグリーンウェーブ走行支援システムが知られている。特許文献1は、当該支援システムの一例を開示する。
具体的には、特許文献1のシステムは、新たな装置を導入することなく、信号機の切り換え周期を特定する情報提供システムである。
特許文献1のシステムでは、車両が交差点で停止中の状態から走行を再開したときの、時刻情報及び車両の位置情報を含む車両データに基づいて、交通信号機の切り換え周期が推定される。
特許文献1のシステムでは、車両が交差点で停止中の状態から走行を再開したときの、時刻情報及び車両の位置情報を含む車両データに基づいて、交通信号機の切り換え周期が推定される。
本開示の一態様に係る情報処理装置は、複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶する記憶部と、前記記憶部に記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定する情報処理を実行する制御部と、を備え、前記信号制御情報は、前記交差点のサイクル長及びスプリットを含み、前記情報処理は、前記複数のプローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む。
本開示の一態様に係る方法は、情報処理装置が実行する情報処理方法であって、複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶するステップと、前記記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定するステップと、を含み、前記信号制御情報は、前記交差点のサイクル長及びスプリットを含み、前記情報処理は、前記複数の前記プローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む。
本開示の一態様に係るコンピュータプログラムは、複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶するステップと、前記記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定するステップと、を実行する情報処理装置として、コンピュータを機能させるコンピュータプログラムであって、前記信号制御情報は、前記交差点のサイクル長及びスプリットを含み、前記情報処理は、前記複数の前記プローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む。
本開示は、上記のような特徴的な構成を備えるシステム及び装置として実現できるだけでなく、かかる特徴的な構成をコンピュータに実行させるためのプログラムとして実現することができる。また、本開示は、システム及び装置の一部又は全部を実現する半導体集積回路として実現することができる。
[本開示が解決しようとする課題]
特許文献1のシステムでは、交差点で停止した車両の発進情報を利用するので、交差点の手前において赤信号で停止する車両が少ない場合には、信号情報を精度よく推定するのが困難である。従って、信号情報の推定を安定的に行えないという問題がある。
本開示は、かかる問題点に鑑み、交差点の信号制御情報を安定的に推定できる情報処理装置等を提供することを目的とする。
特許文献1のシステムでは、交差点で停止した車両の発進情報を利用するので、交差点の手前において赤信号で停止する車両が少ない場合には、信号情報を精度よく推定するのが困難である。従って、信号情報の推定を安定的に行えないという問題がある。
本開示は、かかる問題点に鑑み、交差点の信号制御情報を安定的に推定できる情報処理装置等を提供することを目的とする。
[本開示の効果]
本開示によれば、交差点の信号制御情報の推定精度を高めることができる。
本開示によれば、交差点の信号制御情報の推定精度を高めることができる。
[本開示の実施形態の概要]
以下、本開示の実施形態の概要を列記して説明する。
(1)本実施形態の情報処理装置は、複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶する記憶部と、前記記憶部に記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定する情報処理を実行する制御部と、を備え、前記信号制御情報は、前記交差点のサイクル長及びスプリットを含み、前記情報処理は、前記複数のプローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む。
以下、本開示の実施形態の概要を列記して説明する。
(1)本実施形態の情報処理装置は、複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶する記憶部と、前記記憶部に記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定する情報処理を実行する制御部と、を備え、前記信号制御情報は、前記交差点のサイクル長及びスプリットを含み、前記情報処理は、前記複数のプローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む。
本実施形態の情報処理装置によれば、複数のプローブ車両による交差点の通過時刻を用いて、交差点のサイクル長及びスプリットを推定するので、赤信号で停止する車両の有無に関係なく、交差点のサイクル長及びスプリットを推定できる。従って、交差点の信号制御情報を安定的に推定することができる。
(2)本実施形態の情報処理装置において、前記第1情報処理は、前記記憶部に記憶された前記プローブ情報の一部であって前記走行時刻が所定期間に含まれる前記プローブ情報に基づいて、前記交差点の第1方向における第1方向通過時刻に関する第1時系列データと、前記第1方向と交差する第2方向の第2方向通過時刻に関する第2時系列データと、を生成する処理を含み、前記第1方向通過時刻と前記第2方向通過時刻とを用いて、前記交差点の前記サイクル長及び前記スプリットを推定してもよい。
(3)本実施形態の情報処理装置において、前記第1情報処理は、前記第1時系列データと前記第2時系列データを含みかつ前記第2時系列データのデータ数が最小となる第1期間と、前記第1時系列データと前記第2時系列データを含みかつ前記第1時系列データのデータ数が最小となる第2期間と、の組み合わせを求める処理を含んでいてもよい。
上記情報処理装置によれば、第1方向に通行権のある時間帯を示す第1期間と、実際に交差点に適用されている第1方向の通行権の期間との誤差を減らすことができる。第2期間についても同様である。その結果、誤差の少ない第1期間と第2期間に基づいてサイクル長及びスプリットの推定値を精度よく求めることができる。
(4)本実施形態の情報処理装置において、前記第1情報処理は、前記第1期間、前記第2期間、及び前記第1期間と前記第2期間の間のギャップ時間に基づいて、前記サイクル長と前記スプリットを算出する処理を含んでいてもよい。
上記情報処理装置によれば、例えば、サイクル長は、第1期間、第2期間及びギャップ時間の合計値として算出でき、第1方向のスプリットは、第1期間/サイクル長で算出でき、第2方向のスプリットは、第2期間/サイクル長で算出できる。
(5)本実施形態の情報処理装置において、前記信号制御情報は、前記交差点のサイクル開始時刻を含み、前記情報処理は、複数の前記プローブ車両による前記交差点の前記通過時刻を用いて、前記交差点のサイクル開始時刻を推定する第2情報処理を含んでいてもよい。
上記情報処理装置によれば、複数のプローブ車両による交差点の通過時刻を用いて、交差点のサイクル長及びスプリットを推定するので、赤信号で停止する車両の有無に関係なく、交差点のサイクル開始時刻を推定できる。従って、交差点の信号制御情報を安定的に推定することができる。
(6)本実施形態の情報処理装置において、前記プローブ情報は、前記第2情報処理の実行日に前記プローブ車両の走行時刻が含まれる前記プローブ情報を含み、前記第2情報処理は、前記実行日の前記プローブ情報に基づいて、前記第1方向の前記実行日分の前記通過時刻を含む第3時系列データと、前記第1方向と交差する前記第2方向の前記実行日分の前記通過時刻を含む第4時系列データと、を生成する処理を含み、前記第1方向の前記実行日分の前記通過時刻と、前記第2方向の前記実行日分の前記通過時刻とを用いて、前記交差点の前記サイクル開始時刻を推定してもよい。
上記情報処理装置によれば、サイクル開始時刻の日単位の変動の影響を受けることなく、第2情報処理の実行日のサイクル開始時刻を求めることができる。
(7)本実施形態の情報処理装置において、前記第2情報処理は、前記第1期間が前記第3時系列データと前記第4時系列データを含みかつ前記第1期間が含む前記第4時系列データのデータ数が最小となる条件、及び、前記第2期間が前記第3時系列データと前記第4時系列データを含みかつ前記第2期間が含む前記第3時系列データのデータ数が最小となる条件を満たすように、前記サイクル開始時刻を求める処理を含んでいてもよい。
上記情報処理装置によれば、第2情報処理の実行日分の通過時刻を含む時系列データに適合する実行日分のサイクル開始時刻を精度良く推定することができる。
(8)本実施形態の情報処理装置において、前記信号制御情報は、前記交差点で実行中の交通信号制御の種別を含み、前記情報処理は、前記第1期間、前記第2期間、前記ギャップ時間、及び前記サイクル長に基づいて、前記制御種別を推定する第3情報処理を含んでいてもよい。
上記情報処理装置によれば、第1情報処理の出力結果(第1期間、第2期間、ギャップ時間、及びサイクル長)を利用して、交差点の制御種別を推定することができる。
(9)本実施形態の情報処理装置において、前記第3情報処理は、前記第1期間、前記第2期間、及び前記サイクル長が一定である期間の多寡に基づいて、前記種別が定周期制御及び集中制御のいずれであるかを判定する処理を含んでいてもよい。
上記情報処理装置によれば、第1期間、第2期間、及びサイクル長が恒常的に一定である場合は、定周期制御(交通管制センターの介入なし)と判定し、そうでない場合は、集中制御(交通管制センターの介入あり)と判定することができる。
(10)本実施形態の情報処理装置において、前記第3情報処理は、前記ギャップ時間の多寡に基づいて、前記種別が歩車分離制御か否かを判定する処理を含んでいてもよい。
上記情報処理装置によれば、ギャップ時間が非常に大きい場合は、第1期間と第2期間の間に歩行者のみに通行権がある時間帯が含まれる可能性が高いので、交通信号制御の種別を歩車分離制御と判定することができる。
(11)本実施形態の情報処理装置において、前記信号制御情報は、前記交差点の信号現示を含み、前記情報処理は、前記通過時刻に前記交差点に流入した前記プローブ車両の流入方向と流出方向に基づいて、前記交差点の信号現示を推定する第4情報処理を含んでいてもよい。
上記情報処理装置によれば、第1情報処理で用いるデータ(プローブ車両による交差点の通過時刻)を利用して、交差点の信号現示を推定することができる。
(12)本実施形態の情報処理装置において、前記第4情報処理は、前記通過時刻に前記流入方向及び前記流出方向のイベントを付加する処理と、前記イベントが右折である前記通過時刻のみを含む時間帯が所定時間以上である流入路を抽出する処理と、を含んでいてもよい。
上記情報処理装置によれば、イベントが右折のみである通過時刻のみを含む時間帯が所定時間以上である流入路を、右折専用の現示が採用されている流入路として抽出することができる。
(13)本実施形態に係る方法は、上述の(1)から(12)の情報処理装置が実行する情報処理方法である。従って、本実施形態の情報処理方法は、上述の(1)から(12)の情報処理方法と同様の作用効果を奏する。
(14)本実施形態に係るプログラムは、上述の(1)から(12)の情報処理装置としてコンピュータを機能させるためのコンピュータプログラムである。従って、本実施形態のプログラムは、上述の(1)から(12)の情報処理装置と同様の作用効果を奏する。
<本開示の実施形態の詳細>
以下、図面を参照して、本開示の実施形態の詳細を説明する。なお、以下に記載する実施形態の少なくとも一部を任意に組み合わせてもよい。
以下、図面を参照して、本開示の実施形態の詳細を説明する。なお、以下に記載する実施形態の少なくとも一部を任意に組み合わせてもよい。
〔用語の定義〕
本実施形態の詳細を説明するに当たり、まず、本明細書で用いる用語の定義を行う。
「車両」:道路を通行する車両全般のことをいう。車両の駆動方式は、内燃機関に限らず、電気自動車及びハイブリッドカーも車両に含まれる。
本実施形態では、単に「車両」というときは、プローブ情報を送信可能な車載装置を有するプローブ車両と、プローブ情報を外部に提供しない通常の車両の双方を含む。
本実施形態の詳細を説明するに当たり、まず、本明細書で用いる用語の定義を行う。
「車両」:道路を通行する車両全般のことをいう。車両の駆動方式は、内燃機関に限らず、電気自動車及びハイブリッドカーも車両に含まれる。
本実施形態では、単に「車両」というときは、プローブ情報を送信可能な車載装置を有するプローブ車両と、プローブ情報を外部に提供しない通常の車両の双方を含む。
「プローブ情報」:道路を走行中のプローブ車両がセンシングした当該車両に関する各種のデータを含む情報のことをいう。プローブ情報は、プローブデータ又はフローティングカーデータともいう。プローブ情報には、プローブ車両の識別情報、走行位置、走行速度、進行方位及びこれらの発生時刻(走行時刻)などの車両属性データが含まれる。
「プローブ車両」:自車両の車両属性データをセンシングして、センシングしたデータを含むプローブ情報を外部に送信する車両のことをいう。
「プローブ車両」:自車両の車両属性データをセンシングして、センシングしたデータを含むプローブ情報を外部に送信する車両のことをいう。
〔システムの全体構成〕
図1は、本実施形態に係る情報処理システム100の全体構成図である。図2は、システム100に属する第1サーバ1、第2サーバ2及びプローブ車両3の車載装置4のブロック図である。
図1及び図2に示すように、情報処理システム100は、第1サーバ1と、第1サーバ1と通信可能な第2サーバ2と、第1サーバ1と通信可能なプローブ車両3とを備える。プローブ車両3の車載装置4は、車内ネットワークに属する複数の車載機器を含む。
図1は、本実施形態に係る情報処理システム100の全体構成図である。図2は、システム100に属する第1サーバ1、第2サーバ2及びプローブ車両3の車載装置4のブロック図である。
図1及び図2に示すように、情報処理システム100は、第1サーバ1と、第1サーバ1と通信可能な第2サーバ2と、第1サーバ1と通信可能なプローブ車両3とを備える。プローブ車両3の車載装置4は、車内ネットワークに属する複数の車載機器を含む。
第1サーバ1は、プローブ車両3からの情報収集とプローブ車両3への情報提供を行う情報処理装置である。なお、第1サーバ1は、プローブ車両3からプローブ車両以外の車両に情報提供してもよい。第2サーバ2は、第1サーバ1から提供されたプローブ情報を利用して交通信号制御に関する情報を生成する情報処理装置である。
第1サーバ1及び第2サーバ2は、オンプレミスサーバ及びクラウドサーバのいずれでもよい。
第1サーバ1及び第2サーバ2は、オンプレミスサーバ及びクラウドサーバのいずれでもよい。
プローブ車両3の車載装置4は、各地の無線基地局7(例えば携帯基地局)との無線通信が可能である。無線基地局7は、移動体通信のコアネットワーク及びインターネットなどを含む公衆通信網8を介して第1サーバ1と通信可能である。
プローブ車両3の車載装置4は、アップリンクデータを含む第1サーバ1宛ての通信パケットを無線基地局7に無線送信する。アップリンクデータには、プローブ車両3がセンシングしたプローブ情報S1などが含まれる。
プローブ車両3の車載装置4は、アップリンクデータを含む第1サーバ1宛ての通信パケットを無線基地局7に無線送信する。アップリンクデータには、プローブ車両3がセンシングしたプローブ情報S1などが含まれる。
第1サーバ1は、ダウンリンクデータを含む車載装置4宛ての通信パケットを公衆通信網8に送信する。ダウンリンクデータには、車両運転の支援に役立つ車両向けの提供情報S2が含まれる。
提供情報S2は、例えば、渋滞情報、駐車場などの各種施設の位置情報、及び交差点の信号制御のうちの少なくとも1つを含む。交差点の信号情報は、現時点から近未来までの所定期間(例えば2サイクル)における信号灯器5の動作状態を表す情報である。
提供情報S2は、例えば、渋滞情報、駐車場などの各種施設の位置情報、及び交差点の信号制御のうちの少なくとも1つを含む。交差点の信号情報は、現時点から近未来までの所定期間(例えば2サイクル)における信号灯器5の動作状態を表す情報である。
具体的には、交差点の信号情報には、例えば以下の情報が含まれる。
情報1:提供対象となる交差点の位置及び名称
情報2:提供対象となる流入路の位置及び名称
情報3:流入路に通行権を与える信号灯器5の点灯順序と灯器点灯時に通行可能な方向 情報4:流入路の現在の灯色内容(どの灯器が点灯しているか)
情報5:各灯器を点灯又は消灯させるタイミング(絶対時刻又は基準時刻からの残り秒数のいずれでもよい。)
情報1:提供対象となる交差点の位置及び名称
情報2:提供対象となる流入路の位置及び名称
情報3:流入路に通行権を与える信号灯器5の点灯順序と灯器点灯時に通行可能な方向 情報4:流入路の現在の灯色内容(どの灯器が点灯しているか)
情報5:各灯器を点灯又は消灯させるタイミング(絶対時刻又は基準時刻からの残り秒数のいずれでもよい。)
第2サーバ2は、第1サーバ1から所定期間分のプローブ情報S1を取得し、取得したプローブ情報S1に基づいて、交差点に適用中の信号制御情報S3を生成する。第2サーバ2は、生成した信号制御情報S3を第1サーバ1に送信する。
信号制御情報S3は、例えば、交差点に適用中の信号制御パラメータ、交通信号制御の制御種別、及び信号現示のうちの少なくとも1つを含む。
信号制御情報S3は、例えば、交差点に適用中の信号制御パラメータ、交通信号制御の制御種別、及び信号現示のうちの少なくとも1つを含む。
本実施形態では、「信号制御パラメータ」は、サイクル長、スプリット、及びサイクル開始時刻を含む。「サイクル長」とは、交通信号機の青(又は赤)開始時刻から次の青(又は赤)開始時刻までの1サイクルの時間のことをいう。
「スプリット」とは、1サイクルの時間のうち、交差点を構成する各道路に青信号が割り当てられる時間(又は各道路の時間配分の割合)のことをいう。「サイクル開始時刻」とは、サイクル開始時点を表す時刻のことをいい、絶対時刻及び相対時刻のいずれでもよい。
「スプリット」とは、1サイクルの時間のうち、交差点を構成する各道路に青信号が割り当てられる時間(又は各道路の時間配分の割合)のことをいう。「サイクル開始時刻」とは、サイクル開始時点を表す時刻のことをいい、絶対時刻及び相対時刻のいずれでもよい。
「信号現示」は、交差点を通過する複数の交通流について、同時に通行権が与えられている交通流の一群、或いはその一群に通行権が割り当てられている時間帯のことをいう。
「制御種別」は、交差点で適用中の交通信号制御の種類のことをいう。制御種別は、例えば、定周期制御、集中制御、及び歩車分離制御などを含む。
「制御種別」は、交差点で適用中の交通信号制御の種類のことをいう。制御種別は、例えば、定周期制御、集中制御、及び歩車分離制御などを含む。
「定周期制御」は、交通信号機がスタンドアロンで動作し、交通管制センターによって介入されない交通信号制御である。「集中制御」は、交通信号機が交通管制センターと専用の通信回線で接続され、交通管制センターが交通状況に応じて交通信号機の動作に介入する交通信号制御である。
「歩車分離制御」は、プローブ車両3を含む車両に通行権がある時間帯と、歩行者に通行権がある時間帯とが完全に分離するように、信号灯器5の点灯状態を決定する交通信号制御である。
「歩車分離制御」は、プローブ車両3を含む車両に通行権がある時間帯と、歩行者に通行権がある時間帯とが完全に分離するように、信号灯器5の点灯状態を決定する交通信号制御である。
第1サーバ1は、第2サーバ2から信号制御情報S3を取得すると、取得した信号制御情報S3から前述の交差点の信号情報を生成する。第1サーバ1は、生成した信号情報を提供情報S2に含める。これにより、交差点の信号情報がプローブ車両3に提供される。
もっとも、信号制御情報S3から信号情報を生成する処理をプローブ車両3が実行するシステムの場合には、第1サーバ1は、第2サーバ2から取得した信号制御情報S3を、車両向けの提供情報S2としてそのままプローブ車両3に送信してもよい。
もっとも、信号制御情報S3から信号情報を生成する処理をプローブ車両3が実行するシステムの場合には、第1サーバ1は、第2サーバ2から取得した信号制御情報S3を、車両向けの提供情報S2としてそのままプローブ車両3に送信してもよい。
〔第1サーバの構成〕
図2に示すように、第1サーバ1は、制御部11、記憶部12、通信部13、同期処理部14、及びプローブデータベース15、提供情報データベース16、会員データベース17を備える。
プローブデータベース15、提供情報データベース16、会員データベース17は、記憶部12に所定のデータ配列で構築される電子データである。もっとも、プローブデータベース15、提供情報データベース16、会員データベース17の一部又は全部を第1サーバ1に接続された外部記憶装置(図示せず)に構築してもよい。
図2に示すように、第1サーバ1は、制御部11、記憶部12、通信部13、同期処理部14、及びプローブデータベース15、提供情報データベース16、会員データベース17を備える。
プローブデータベース15、提供情報データベース16、会員データベース17は、記憶部12に所定のデータ配列で構築される電子データである。もっとも、プローブデータベース15、提供情報データベース16、会員データベース17の一部又は全部を第1サーバ1に接続された外部記憶装置(図示せず)に構築してもよい。
制御部11は、CPU(Central Processing Unit)及びRAM(Random Access Memory)などを含む演算処理装置である。制御部11には、FPGA(Field-Programmable Gate Array)などの集積回路が含まれていてもよい。
制御部11は、記憶部12に格納されたコンピュータプログラム18をメインメモリ(RAM)に読み出し、コンピュータプログラム18に従って各種の情報処理を実行する。この情報処理には、信号制御情報S3に基づいて提供情報S2の一種である信号情報を生成する処理などが含まれる。
制御部11は、記憶部12に格納されたコンピュータプログラム18をメインメモリ(RAM)に読み出し、コンピュータプログラム18に従って各種の情報処理を実行する。この情報処理には、信号制御情報S3に基づいて提供情報S2の一種である信号情報を生成する処理などが含まれる。
記憶部12は、HDD(Hard Disk Drive)及びSSD(Solid State Drive)などの不揮発性メモリを含む補助記憶装置である。
記憶部12は、フラッシュROM(Read Only Memory)、USB(Universal Serial Bus)メモリ、又はSDカードなどが含まれていてもよい。
記憶部12は、フラッシュROM(Read Only Memory)、USB(Universal Serial Bus)メモリ、又はSDカードなどが含まれていてもよい。
通信部13は、公衆通信網8を介した通信が可能な通信インタフェースである。通信部13は、無線基地局7からプローブ情報S1を受信可能であり、制御部11が生成した提供情報S2を無線基地局7に送信可能である。
複数種類のデータベースには、プローブデータベース15、提供情報データベース16、及び会員データベース17が含まれる。プローブデータベース15には、登録済みの複数のプローブ車両3から受信したプローブ情報S1が蓄積される。
提供情報データベース16には、制御部11が生成した提供情報S2が一時的に記録される。会員データベース17には、登録会員(例えばプローブ車両3の所有者)の個人情報、及び登録会員の通信端末の識別情報(例えばMACアドレスなど)などが記録される。
提供情報データベース16には、制御部11が生成した提供情報S2が一時的に記録される。会員データベース17には、登録会員(例えばプローブ車両3の所有者)の個人情報、及び登録会員の通信端末の識別情報(例えばMACアドレスなど)などが記録される。
同期処理部14は、所定の同期方式により、車載装置4などの他の通信ノードと時刻同期を図るための処理部である。制御部11は、同期処理部14が生成するローカル時刻に従って、信号情報に含める各灯器の点灯又は消灯タイミングなどを決定する。
同期処理部14の同期方式は、例えば、GNSS(Global Navigation Satellite System)受信機の出力に基づく同期方式や、NTP(Network Time Protocol)及びPTP(Precision Time Protocol)などの通信フレームを用いた同期方式などを採用し得る。
同期処理部14の同期方式は、例えば、GNSS(Global Navigation Satellite System)受信機の出力に基づく同期方式や、NTP(Network Time Protocol)及びPTP(Precision Time Protocol)などの通信フレームを用いた同期方式などを採用し得る。
〔第2サーバの構成〕
図2に示すように、第2サーバ2は、制御部21、記憶部22、通信部23、及び地図データベース25、プローブデータベース26、制御情報データベース27を備える。
地図データベース25、プローブデータベース26、制御情報データベース27は、記憶部22に所定のデータ配列で構築される電子データである。地図データベース25、プローブデータベース26、制御情報データベース27の一部又は全部を第2サーバ2に接続された外部記憶装置(図示せず)に構築してもよい。
図2に示すように、第2サーバ2は、制御部21、記憶部22、通信部23、及び地図データベース25、プローブデータベース26、制御情報データベース27を備える。
地図データベース25、プローブデータベース26、制御情報データベース27は、記憶部22に所定のデータ配列で構築される電子データである。地図データベース25、プローブデータベース26、制御情報データベース27の一部又は全部を第2サーバ2に接続された外部記憶装置(図示せず)に構築してもよい。
制御部21は、CPU及びRAMなどを含む演算処理装置である。制御部21には、FPGAなどの集積回路が含まれていてもよい。
制御部21は、記憶部22に格納されたコンピュータプログラム28をメインメモリ(RAM)に読み出し、コンピュータプログラム28に従って各種の情報処理を実行する。この情報処理には、プローブ情報S1から信号制御情報S3を生成する処理などが含まれる。
制御部21は、記憶部22に格納されたコンピュータプログラム28をメインメモリ(RAM)に読み出し、コンピュータプログラム28に従って各種の情報処理を実行する。この情報処理には、プローブ情報S1から信号制御情報S3を生成する処理などが含まれる。
記憶部22は、HDD及びSSDなどの不揮発性メモリを含む補助記憶装置である。
記憶部22は、フラッシュROM、USBメモリ、又はSDカードなどを含んでいてもよい。
通信部23は、公衆通信網8を介した通信が可能な通信インタフェースである。通信部23は、第1サーバ1からプローブ情報S1を受信可能であり、制御部11が生成した信号制御情報S3を第1サーバ1に送信可能である。
記憶部22は、フラッシュROM、USBメモリ、又はSDカードなどを含んでいてもよい。
通信部23は、公衆通信網8を介した通信が可能な通信インタフェースである。通信部23は、第1サーバ1からプローブ情報S1を受信可能であり、制御部11が生成した信号制御情報S3を第1サーバ1に送信可能である。
複数種類のデータベースには、地図データベース25、プローブデータベース26、及び制御情報データベース27が含まれる。
地図データベース25には、国内を網羅する道路地図データ29が記録される。道路地図データ29は、交差点データとリンクデータを含む。
地図データベース25には、国内を網羅する道路地図データ29が記録される。道路地図データ29は、交差点データとリンクデータを含む。
「交差点データ」は、国内の交差点に付与された交差点IDと、交差点の位置情報とを対応付けたデータである。
「リンクデータ」は、国内の道路に対応して付与された特定リンクのリンクIDに対して、次の情報を対応付けたデータである。
「リンクデータ」は、国内の道路に対応して付与された特定リンクのリンクIDに対して、次の情報を対応付けたデータである。
情報A:特定リンクの始点・終点・補間点の位置情報
情報B:特定リンクの始点・終点・補間点の方位情報
情報C:特定リンクの始点に接続するリンクID
情報D:特定リンクの終点に接続するリンクID
情報B:特定リンクの始点・終点・補間点の方位情報
情報C:特定リンクの始点に接続するリンクID
情報D:特定リンクの終点に接続するリンクID
道路地図データ29は、実際の道路線形と道路の走行方向に対応したネットワークを構成する。このため、道路地図データ29は、交差点を表すノード間の道路区間を有向リンクl(小文字のエル)で繋いだネットワークになっている。
具体的には、道路地図データ29のデータ構造は、交差点ごとにノードnが設定され、各ノードn間が逆向きの一対の有向リンクlで繋がった有向グラフを含む。従って、一方通行の道路の場合は、一方向の有向リンクlのみノードnが接続される。
具体的には、道路地図データ29のデータ構造は、交差点ごとにノードnが設定され、各ノードn間が逆向きの一対の有向リンクlで繋がった有向グラフを含む。従って、一方通行の道路の場合は、一方向の有向リンクlのみノードnが接続される。
プローブデータベース26には、第1サーバ1から受信した所定期間分のプローブ情報S1が記録される。
具体的には、制御部21は、走行時刻が当日を含む過去の所定期間分(例えば1から2か月分)のプローブ情報S1を第1サーバ1に要求し、要求に応じた第1サーバ1から受信した所定期間分のプローブ情報S1を、プローブデータベース26に格納する。
具体的には、制御部21は、走行時刻が当日を含む過去の所定期間分(例えば1から2か月分)のプローブ情報S1を第1サーバ1に要求し、要求に応じた第1サーバ1から受信した所定期間分のプローブ情報S1を、プローブデータベース26に格納する。
制御情報データベース27には、制御部21が生成した信号制御情報S3が一時的に記録される。
具体的には、制御部21は、プローブデータベース26に格納したプローブ情報S1から交差点の信号制御情報S3を生成し、生成した信号制御情報S3を制御情報データベース27に記録する。制御部21は、第1サーバ1から要求があった場合、制御情報データベース27から要求対象の信号制御情報S3を読み出して第1サーバ1に送信する。
具体的には、制御部21は、プローブデータベース26に格納したプローブ情報S1から交差点の信号制御情報S3を生成し、生成した信号制御情報S3を制御情報データベース27に記録する。制御部21は、第1サーバ1から要求があった場合、制御情報データベース27から要求対象の信号制御情報S3を読み出して第1サーバ1に送信する。
〔車載装置の構成〕
図2に示すように、車載装置4は、制御部31、記憶部32、通信部33、同期処理部34、及びセンサ35を備える。
このうち、制御部31、記憶部32、及び同期処理部34は、1つ又は複数の電子制御ユニット(ECU)から構成される。ECU、通信部33、及びセンサ35は、所定の通信ケーブルを通信経路とする車内ネットワークの通信ノードである。
図2に示すように、車載装置4は、制御部31、記憶部32、通信部33、同期処理部34、及びセンサ35を備える。
このうち、制御部31、記憶部32、及び同期処理部34は、1つ又は複数の電子制御ユニット(ECU)から構成される。ECU、通信部33、及びセンサ35は、所定の通信ケーブルを通信経路とする車内ネットワークの通信ノードである。
制御部31は、CPU及びRAMなどを含む演算処理装置である。制御部31には、FPGAなどの集積回路が含まれていてもよい。記憶部32は、HDD及びSSDなどの不揮発性メモリを含む補助記憶装置である。
制御部31は、記憶部32に格納されたコンピュータプログラム36をメインメモリ(RAM)に読み出し、コンピュータプログラム36に従って各種の情報処理を実行する。この情報処理には、上述のプローブ情報S1の生成及び送信処理などが含まれる。
制御部31は、記憶部32に格納されたコンピュータプログラム36をメインメモリ(RAM)に読み出し、コンピュータプログラム36に従って各種の情報処理を実行する。この情報処理には、上述のプローブ情報S1の生成及び送信処理などが含まれる。
通信部33は、プローブ車両3に恒常的に搭載されたゲートウェイなどの無線通信機、或いは、プローブ車両3に一時的に搭載される通信端末(例えばスマートフォン、タブレット型コンピュータ又はノード型パソコンなど)である。なお、通信部33は、プローブ車両3以外の車両に搭載されていてもよい。
センサ35は、自車両の現在位置を計測する位置センサと、自車両の速度を計測する速度センサと、自車両の現在方位を検出する方位センサとを含む。
位置センサは、例えばGNSS受信機よりなり、自車両の現在位置をほぼリアルタイムで計測する。速度センサは、例えばギアの回転に応じてパルスを発生するMRセンサよりなり、自車両の現在速度をほぼリアルタイムで計測する。方位センサは、例えばジャイロセンサよりなり、自車両の現在方位をほぼリアルタイムで計測する。
位置センサは、例えばGNSS受信機よりなり、自車両の現在位置をほぼリアルタイムで計測する。速度センサは、例えばギアの回転に応じてパルスを発生するMRセンサよりなり、自車両の現在速度をほぼリアルタイムで計測する。方位センサは、例えばジャイロセンサよりなり、自車両の現在方位をほぼリアルタイムで計測する。
同期処理部34は、所定の同期方式により、第1サーバ1などの他の通信ノードと時刻同期を図るための処理部である。制御部31は、同期処理部34が生成するローカル時刻に従って、プローブ情報S1に含める走行時刻(プローブ車両3の現在位置に対応する現在時刻)などを決定する。
同期処理部34の同期方式は、例えば、GNSS受信機の出力に基づく同期方式や、NTP及びPTPなどの通信フレームを用いた同期方式などを採用し得る。
同期処理部34の同期方式は、例えば、GNSS受信機の出力に基づく同期方式や、NTP及びPTPなどの通信フレームを用いた同期方式などを採用し得る。
〔第2サーバによる情報処理〕
図3は、第2サーバ2の制御部21が実行する、信号制御情報S3を推定するための情報処理の一例を示すフローチャートである。
図3の情報処理は、第1サーバ1から指定された所定の交差点IDについて、所定の制御周期P(P:例えば15分)ごとに実行される。以下において、今回の制御周期を「今回周期Pi」と記載し、前回の制御周期を「前回周期Pi-1」と記載する。なお、添え字iは、制御処理を実行するごとにインクリメントされる整数である。
図3は、第2サーバ2の制御部21が実行する、信号制御情報S3を推定するための情報処理の一例を示すフローチャートである。
図3の情報処理は、第1サーバ1から指定された所定の交差点IDについて、所定の制御周期P(P:例えば15分)ごとに実行される。以下において、今回の制御周期を「今回周期Pi」と記載し、前回の制御周期を「前回周期Pi-1」と記載する。なお、添え字iは、制御処理を実行するごとにインクリメントされる整数である。
図3に示すように、最初に、制御部21は、前回周期Pi-1において推定済みの信号制御パラメータを制御情報データベース27から読み出す(ステップST11)。
信号制御パラメータには、推定対象である交差点のサイクル長、スプリット、及びサイクル開始時刻が含まれる。
信号制御パラメータには、推定対象である交差点のサイクル長、スプリット、及びサイクル開始時刻が含まれる。
次に、制御部21は、読み出した前回周期Pi-1の信号制御パラメータ(サイクル長、スプリット、及びサイクル開始時刻)が、今回周期Piのプローブ情報S1に適合するか否かを判定する(ステップST12)。
この判定は、例えば、以下の「前回周期Pi-1の青信号時間」において以下の「今回周期Piの走行軌跡」が発生し得るか否かにより行うことができる。
この判定は、例えば、以下の「前回周期Pi-1の青信号時間」において以下の「今回周期Piの走行軌跡」が発生し得るか否かにより行うことができる。
前回周期Pi-1の青信号時間:前回周期Pi-1の信号制御パラメータから算出される、交差点の所定方向(例えば主道路方向)の青信号時間
今回周期Piの走行軌跡:交差点への通過時刻が今回周期Pi内であるプローブ情報S1により算出される、交差点を所定方向(例えば主道路方向)に抜ける少なくとも1つのプローブ車両3の走行軌跡
今回周期Piの走行軌跡:交差点への通過時刻が今回周期Pi内であるプローブ情報S1により算出される、交差点を所定方向(例えば主道路方向)に抜ける少なくとも1つのプローブ車両3の走行軌跡
ステップST12の判定結果が肯定的である場合は、制御部11は、今回周期Piの信号制御情報S3として、前回周期Pi-1の信号制御情報S3をそのまま採用する(ステップST13)。
ステップST12の判定結果が否定的である場合は、制御部11は、サイクル長とスプリットを推定するための「第1情報処理」を実行する(ステップST14)。この処理の詳細は後述する。
制御部11は、第1情報処理を実行すると、サイクル開始時刻を推定するための「第2情報処理」を実行する(ステップST15)。この処理の詳細は後述する。
制御部11は、第1情報処理を実行すると、サイクル開始時刻を推定するための「第2情報処理」を実行する(ステップST15)。この処理の詳細は後述する。
制御部11は、第2情報処理を実行すると、交差点で実行中の交通信号制御の制御種別を推定するための「第3情報処理」を実行する(ステップST16)。この処理の詳細は後述する。
制御部11は、第3情報処理を実行すると、信号制御情報S3を今回周期Piにおいて求めた情報に更新し(ステップST17)、処理を終了する。
制御部11は、第3情報処理を実行すると、信号制御情報S3を今回周期Piにおいて求めた情報に更新し(ステップST17)、処理を終了する。
〔第1情報処理(サイクル長とスプリットの推定)〕
図4は、第1情報処理の一例を示す説明図である。
図4において、左から右に向かう横軸は時刻を表し、図中の中抜きドットは、複数のプローブ車両3による交差点通過時刻を意味する。
図4は、第1情報処理の一例を示す説明図である。
図4において、左から右に向かう横軸は時刻を表し、図中の中抜きドットは、複数のプローブ車両3による交差点通過時刻を意味する。
「交差点通過時刻」は、プローブ車両3が交差点手前の所定地点を通過した時刻を意味する。以下、交差点通過時刻を「通過時刻」と略記することがある。
本実施形態では、上記の交差点手前の所定地点として流入路に引かれた「停止線」を採用する。もっとも、所定地点は、プローブ車両3が実質的に交差点への進入を開始した地点と見なせる位置であればよく、流入路の停止線から上流側又は下流側に若干ずれた位置であってもよい。
本実施形態では、上記の交差点手前の所定地点として流入路に引かれた「停止線」を採用する。もっとも、所定地点は、プローブ車両3が実質的に交差点への進入を開始した地点と見なせる位置であればよく、流入路の停止線から上流側又は下流側に若干ずれた位置であってもよい。
「主道路」は、交差点で交差する2つの道路のうち第1方向に延びる道路を意味する。
「従道路」は、交差点で交差する2つの道路のうち第1方向と異なる第2方向に延びる道路を意味する。
「C」は、交差点のサイクル長である。「SP1」は、主道路のスプリットであり、SP1=T1(j)/Cの式で算出される。「SP2」は、従道路のスプリットであり、SP2=T2(k)/Cの式で算出される。
「従道路」は、交差点で交差する2つの道路のうち第1方向と異なる第2方向に延びる道路を意味する。
「C」は、交差点のサイクル長である。「SP1」は、主道路のスプリットであり、SP1=T1(j)/Cの式で算出される。「SP2」は、従道路のスプリットであり、SP2=T2(k)/Cの式で算出される。
第1時系列データD11は、主道路を通行した複数のプローブ車両3の交差点通過時刻を時系列に並べたデータである。ここでは、図示の通り、データD11がt1からt3,t7からt9の6つの時刻値を含むものとする。
第2時系列データD12は、従道路を通行した複数のプローブ車両3の交差点通過時刻を時系列に並べたデータである。ここでは、図示の通り、データD12がt4からt6,t10からt12の6つの時刻値を含むものとする。
第2時系列データD12は、従道路を通行した複数のプローブ車両3の交差点通過時刻を時系列に並べたデータである。ここでは、図示の通り、データD12がt4からt6,t10からt12の6つの時刻値を含むものとする。
「T1(j)」(jは発生順序を表す自然数:j=1,2…)は、主道路に通行権がある時間長を表す変数(単位:秒)である。以下、T1(j)を「第1期間」という。
「T2(k)」(kは発生順序を表す自然数:k=1,2…)は、従道路に通行権がある時間長を表す変数(単位:秒)である。以下、T2(k)を「第2期間」という。
図4では、第1期間T1(1)の矢印と第2期間T2(1)の矢印の先端同士が接しているが、これらの時間の間には、主道路及び従道路の双方に通行権がないギャップ時間GP(例えば全赤時間)が存在し得る。
「T2(k)」(kは発生順序を表す自然数:k=1,2…)は、従道路に通行権がある時間長を表す変数(単位:秒)である。以下、T2(k)を「第2期間」という。
図4では、第1期間T1(1)の矢印と第2期間T2(1)の矢印の先端同士が接しているが、これらの時間の間には、主道路及び従道路の双方に通行権がないギャップ時間GP(例えば全赤時間)が存在し得る。
本実施形態の第1情報処理は、複数のプローブ車両3による交差点の通過時刻t1からt12を用いて、交差点のサイクル長C及びスプリットSP1,SP2を推定する処理である。図4に示す通り、第1情報処理は、処理PR1と処理PR2を含む。
(処理PR1)
処理PR1は、走行時刻が過去の所定期間に含まれる過去のプローブ情報S1(以下、「過去情報」ともいう。)に基づいて、第1方向についての過去分の通過時刻t1からt3,t7からt9を含む第1時系列データD11と、第2方向についての過去分の通過時刻t4からt6,t10からt12を含む第2時系列データD12とを生成する処理である。
具体的には、制御部21は、プローブ車両3の走行位置と道路地図データ29とのマップマッチングにより、所定期間分(例えば2か月分)の過去情報の中から、交差点の停止線通過のイベントが発生したプローブ情報S1を抽出する。
処理PR1は、走行時刻が過去の所定期間に含まれる過去のプローブ情報S1(以下、「過去情報」ともいう。)に基づいて、第1方向についての過去分の通過時刻t1からt3,t7からt9を含む第1時系列データD11と、第2方向についての過去分の通過時刻t4からt6,t10からt12を含む第2時系列データD12とを生成する処理である。
具体的には、制御部21は、プローブ車両3の走行位置と道路地図データ29とのマップマッチングにより、所定期間分(例えば2か月分)の過去情報の中から、交差点の停止線通過のイベントが発生したプローブ情報S1を抽出する。
次に、制御部11は、抽出したプローブ情報S1の走行軌跡が主道路の停止線と交差する時点t1からt3,t7からt9を算出し、これらの時点t1からt3,t7からt9をデータD11に含める時刻値とする。
同様に、制御部11は、抽出したプローブ情報S1の走行軌跡が従道路の停止線と交差する時点t4からt6,t10からt12を算出し、これらの時点t4からt6,t10からt12をデータD12に含める時刻値とする。
同様に、制御部11は、抽出したプローブ情報S1の走行軌跡が従道路の停止線と交差する時点t4からt6,t10からt12を算出し、これらの時点t4からt6,t10からt12をデータD12に含める時刻値とする。
(処理PR2)
処理PR2は、第1時系列データD11と第2時系列データD12を含みかつ第2時系列データD12のデータ数が最小となる第1期間T1(j)と、第1時系列データD11と第2時系列データD12を含みかつ第1時系列データD11のデータ数が最小となる第2期間T2(k)と、の組み合わせを求める処理である。
処理PR2は、第1時系列データD11と第2時系列データD12を含みかつ第2時系列データD12のデータ数が最小となる第1期間T1(j)と、第1時系列データD11と第2時系列データD12を含みかつ第1時系列データD11のデータ数が最小となる第2期間T2(k)と、の組み合わせを求める処理である。
具体的には、制御部11は、次の「変数定義」及び「信号機の制御条件」を満たす範囲内で、T1(j)とT2(k)の値を所定時間(例えば1秒)ずつ増減させることにより、次の「探索条件」を満たすT1(j)とT2(k)の組み合わせを算出する。
なお、T1(j)に対応するD12のデータ数の最小値は、通常ゼロになるが、例えば第2方向の赤信号で交差点に進入したプローブ車両3が存在した場合には、ゼロにならないことがある。T2(k)に対応するD11のデータ数の最小値についても同様である。
なお、T1(j)に対応するD12のデータ数の最小値は、通常ゼロになるが、例えば第2方向の赤信号で交差点に進入したプローブ車両3が存在した場合には、ゼロにならないことがある。T2(k)に対応するD11のデータ数の最小値についても同様である。
変数定義:
サイクル長C=T1(j)+T2(k)+GP
主道路のスプリットSP1=T1(j)/C
従道路のスプリットSP2=T2(k)/C
サイクル長C=T1(j)+T2(k)+GP
主道路のスプリットSP1=T1(j)/C
従道路のスプリットSP2=T2(k)/C
信号機の制御条件:
100秒≦C≦200秒
0.50≦SP1≦0.75
0.25≦SP2≦0.50
100秒≦C≦200秒
0.50≦SP1≦0.75
0.25≦SP2≦0.50
探索条件:
t3-t1<T1(1)≦t3-t1+δ
t6-t4<T2(1)≦t6-t4+δ
t9-t7<T1(2)≦t9-t7+δ
t12-t10<T2(2)≦t12-t10+δ
t3-t1<T1(1)≦t3-t1+δ
t6-t4<T2(1)≦t6-t4+δ
t9-t7<T1(2)≦t9-t7+δ
t12-t10<T2(2)≦t12-t10+δ
上記の変数定義中の「GP」は、主道路と従道路のいずれにも通行権がない、T1(j)とT2(k)の間のギャップ時間である。ギャップ時間GPには、例えばAR(オールレッド)の時間帯が含まれる。歩車分離制御の場合には、歩行者のみに通行権のある時間帯もギャップ時間GPに含まれる。
上記の探索条件において、「δ」は、発進遅延などの誤差を考慮したマージンであり、時系列データD11,D12のデータ数に応じて1秒から数秒の範囲内で設定される。また、上記の探索条件において、jとkは3以上であってもよい。
上記の探索条件において、「δ」は、発進遅延などの誤差を考慮したマージンであり、時系列データD11,D12のデータ数に応じて1秒から数秒の範囲内で設定される。また、上記の探索条件において、jとkは3以上であってもよい。
第1情報処理は、処理PR2で探索した第1期間T1(j)と第2期間T2(k)に基づいて、サイクル長CとスプリットSP1,SP2を算出する処理を含む。
具体的には、制御部21は、T1(j)とT2(k)が確定すると、例えば、T1(1)の開始時点からT1(2)の開始時点までの時刻差をサイクル長Cとし、このサイクル長Cを制御情報データベース27に記録する。
具体的には、制御部21は、T1(j)とT2(k)が確定すると、例えば、T1(1)の開始時点からT1(2)の開始時点までの時刻差をサイクル長Cとし、このサイクル長Cを制御情報データベース27に記録する。
また、制御部21は、上記のサイクル長CとT1(j),T2(k)を変数定義に適用することにより、ギャップ時間GPとスプリットSP1,SP2の値を算出し、これらの算出値を制御情報データベース27に記録する。
なお、探索条件を満たすようにT1(j)とT2(k)を時分割できないため、T1(j)とT2(k)を確定できない場合には、制御部21は、第1情報処理の結果として「不確定」を表すフラグ情報を制御情報データベース27に記録する。
なお、探索条件を満たすようにT1(j)とT2(k)を時分割できないため、T1(j)とT2(k)を確定できない場合には、制御部21は、第1情報処理の結果として「不確定」を表すフラグ情報を制御情報データベース27に記録する。
〔第2情報処理(サイクル開始時刻の推定)〕
図5は、第2情報処理の一例を示す説明図である。
横軸が時刻を表すこと、中抜きドットが複数のプローブ車両3による通過時刻を意味すること、主道路と従道路の意味、及びサイクル長Cなどの変数の意味は、図4の場合と同様である。なお、「ts」はサイクル開始時刻を意味する。
図5は、第2情報処理の一例を示す説明図である。
横軸が時刻を表すこと、中抜きドットが複数のプローブ車両3による通過時刻を意味すること、主道路と従道路の意味、及びサイクル長Cなどの変数の意味は、図4の場合と同様である。なお、「ts」はサイクル開始時刻を意味する。
第3時系列データD21は、主道路を通行した複数のプローブ車両3の交差点通過時刻を時系列に並べたデータである。ここでは、図示の通り、データD21がu1からu3,u7からu9の6つの時刻値を含むものとする。
第4時系列データD22は、従道路を通行した複数のプローブ車両3の交差点通過時刻を時系列に並べたデータである。ここでは、図示の通り、データD22がu4からu6,u10からu12の6つの時刻値を含むものとする。
第4時系列データD22は、従道路を通行した複数のプローブ車両3の交差点通過時刻を時系列に並べたデータである。ここでは、図示の通り、データD22がu4からu6,u10からu12の6つの時刻値を含むものとする。
T1(j)は、第1情報処理により、主道路に通行権がある第1期間として確定した推定値(単位:秒)である。T2(k)は、第1情報処理により、従道路に通行権がある第2期間として確定した推定値(単位:秒)である。
なお、第2情報処理では第1情報処理で確定したT1(j),T2(k)を用いるので、制御部21は、第1情報処理の結果が「不確定」の場合には、第2情報処理を実行しない。
なお、第2情報処理では第1情報処理で確定したT1(j),T2(k)を用いるので、制御部21は、第1情報処理の結果が「不確定」の場合には、第2情報処理を実行しない。
本実施形態の第2情報処理は、複数のプローブ車両3による交差点の通過時刻u1からu12を用いて、交差点のサイクル開始時刻tsを推定する処理である。図5に示す通り、第2情報処理は、処理PS1と処理PS2を含む。
(処理PS1)
処理PS1は、第2情報処理の実行日(当日)にプローブ車両3の走行時刻が含まれるプローブ情報S1(以下、「当日情報」ともいう。)に基づいて、第1方向についての実行日分(当日分)の通過時刻u1からu3,u7からu9を含む第3時系列データD21と、第2方向についての実行日分の通過時刻u4からu6,u10からu12を含む第4時系列データD22とを生成する処理である。
具体的には、制御部11は、プローブ車両3の走行位置と道路地図データ29とのマップマッチングにより、当日情報の中から、交差点の停止線通過のイベントが発生したプローブ情報S1を抽出する。
処理PS1は、第2情報処理の実行日(当日)にプローブ車両3の走行時刻が含まれるプローブ情報S1(以下、「当日情報」ともいう。)に基づいて、第1方向についての実行日分(当日分)の通過時刻u1からu3,u7からu9を含む第3時系列データD21と、第2方向についての実行日分の通過時刻u4からu6,u10からu12を含む第4時系列データD22とを生成する処理である。
具体的には、制御部11は、プローブ車両3の走行位置と道路地図データ29とのマップマッチングにより、当日情報の中から、交差点の停止線通過のイベントが発生したプローブ情報S1を抽出する。
次に、制御部11は、抽出したプローブ情報S1の走行軌跡が主道路の停止線と交差する時点u1からu3,u7からu9を算出し、これらの時点u1からu3,u7からu9をデータD21に含める時刻値とする。
同様に、制御部11は、抽出したプローブ情報S1の走行軌跡が従道路の停止線と交差する時点u4からu6,u10からu12を算出し、これらの時点u4からu6,u10からu12をデータD22に含める時刻値とする。
同様に、制御部11は、抽出したプローブ情報S1の走行軌跡が従道路の停止線と交差する時点u4からu6,u10からu12を算出し、これらの時点u4からu6,u10からu12をデータD22に含める時刻値とする。
(処理PS2)
処理PS2は、第1期間T1(j)が第3時系列データD21と第4時系列データD22を含みかつ第1期間T1(j)が含む第4時系列データD22のデータ数が最小となる条件、及び、第2期間T2(k)が第3時系列データD21と第4時系列データD22を含みかつ第2期間T2(k)が含む第3時系列データD21のデータ数が最小となる条件を満たすように、サイクル開始時刻tsを求める処理である。
処理PS2は、第1期間T1(j)が第3時系列データD21と第4時系列データD22を含みかつ第1期間T1(j)が含む第4時系列データD22のデータ数が最小となる条件、及び、第2期間T2(k)が第3時系列データD21と第4時系列データD22を含みかつ第2期間T2(k)が含む第3時系列データD21のデータ数が最小となる条件を満たすように、サイクル開始時刻tsを求める処理である。
具体的には、制御部11は、tsの値を所定時間ΔT(例えば1秒)ずつ増減させることにより、次の「探索条件」を満たすtsの値を算出する。
そして、制御部11は、処理PS2によって探索したtsを交差点のサイクル開始時刻の推定値として確定し、確定した推定値を制御情報データベース27に記録する。
なお、T1(1)に対応するD22のデータ数の最小値は、通常ゼロになるが、例えば第2方向の赤信号で交差点に進入したプローブ車両3が存在した場合には、ゼロにならないことがある。T2(2)に対応するD21のデータ数の最小値についても同様である。
そして、制御部11は、処理PS2によって探索したtsを交差点のサイクル開始時刻の推定値として確定し、確定した推定値を制御情報データベース27に記録する。
なお、T1(1)に対応するD22のデータ数の最小値は、通常ゼロになるが、例えば第2方向の赤信号で交差点に進入したプローブ車両3が存在した場合には、ゼロにならないことがある。T2(2)に対応するD21のデータ数の最小値についても同様である。
探索条件:
ts<u1
u3<ts+T1<u4
u6<ts+C<u7
u9<ts+C+T1<u10
u12<ts+2C
ts<u1
u3<ts+T1<u4
u6<ts+C<u7
u9<ts+C+T1<u10
u12<ts+2C
〔第3情報処理(制御種別の推定)〕
図6は、第3情報処理の一例を示すフローチャートである。
本実施形態の第3情報処理は、第1情報処理の結果である、第1期間T1(j)、第2期間T2(k)、ギャップ時間GP、及びサイクル長Cに基づいて、交差点に適用中の交通信号制御の制御種別を推定する処理である。
図6は、第3情報処理の一例を示すフローチャートである。
本実施形態の第3情報処理は、第1情報処理の結果である、第1期間T1(j)、第2期間T2(k)、ギャップ時間GP、及びサイクル長Cに基づいて、交差点に適用中の交通信号制御の制御種別を推定する処理である。
図6に示すように、制御部21は、まず、第1情報処理のフラグ情報が「不確定」であるか否かを判定する(ステップST21)。
ステップST21の判定結果が否定的である場合は、制御部21は、第1期間T1(j)、第2期間T2(k)、ギャップ時間GP、及びサイクル長Cの各値を制御情報データベース27から読み出す(ステップST22)。
ステップST21の判定結果が否定的である場合は、制御部21は、第1期間T1(j)、第2期間T2(k)、ギャップ時間GP、及びサイクル長Cの各値を制御情報データベース27から読み出す(ステップST22)。
次に、制御部21は、ギャップ時間GPが所定の閾値Th以上であるか否かを判定する(ステップST23)。閾値Thは、歩行者のみに通行権を与える場合の時間長に相当し得る時間値であり、例えば30から60秒の範囲内で設定される。
ステップST23の判定結果が否定的である場合は、制御部21は、第1期間T1(j)、第2期間T2(k)、及びサイクル長Cが所定期間継続して一定であるか否かを判定する(ステップST24)。所定期間は、例えば1週間程度に設定される。
ステップST23の判定結果が否定的である場合は、制御部21は、第1期間T1(j)、第2期間T2(k)、及びサイクル長Cが所定期間継続して一定であるか否かを判定する(ステップST24)。所定期間は、例えば1週間程度に設定される。
ステップST24の判定結果が肯定的である場合は、制御部21は、交差点に適用中の制御種別を、歩車分離制御ではない「定周期制御」(交通管制センターの介入なし)と推定する(ステップST26)。
ステップST24の判定結果が否定的である場合は、制御部21は、交差点に適用中の制御種別を、歩車分離制御ではない「集中制御」(交通管制センターの介入あり)と推定する(ステップST27)。
ステップST24の判定結果が否定的である場合は、制御部21は、交差点に適用中の制御種別を、歩車分離制御ではない「集中制御」(交通管制センターの介入あり)と推定する(ステップST27)。
ステップST23の判定結果が肯定的である場合は、制御部21は、第1期間T1(j)、第2期間T2(k)、及びサイクル長Cが所定期間継続して一定であるか否かを判定する(ステップST25)。所定期間は、例えば1週間程度に設定される。
ステップST25の判定結果が肯定的である場合は、制御部21は、交差点に適用中の制御種別を、定周期(交通管制センターの介入なし)の歩車分離制御と推定する(ステップST28)。
ステップST25の判定結果が否定的である場合は、制御部21は、交差点に適用中の制御種別を、集中制御(交通管制センターの介入あり)の歩車分離制御と推定する(ステップST29)。
ステップST25の判定結果が否定的である場合は、制御部21は、交差点に適用中の制御種別を、集中制御(交通管制センターの介入あり)の歩車分離制御と推定する(ステップST29)。
ステップST21の判定結果が肯定的である場合は、制御部21は、交差点に適用中の制御種別を特種制御と推定する(ステップST30)。
「特種制御」は、定周期制御、集中制御、及び歩車分離制御のいずれでもない交通信号制御である。特種制御の例としては、例えば、点滅制御、歩行者による押しボタン制御などがある。なお、交差点通過時刻におけるプローブ車両3の速度が常態的に所定速度(例えば10km/時)以下の場合は、交差点の制御種別を点滅制御と推定してもよい。
「特種制御」は、定周期制御、集中制御、及び歩車分離制御のいずれでもない交通信号制御である。特種制御の例としては、例えば、点滅制御、歩行者による押しボタン制御などがある。なお、交差点通過時刻におけるプローブ車両3の速度が常態的に所定速度(例えば10km/時)以下の場合は、交差点の制御種別を点滅制御と推定してもよい。
〔変形例:第4情報処理(信号現示の推定)〕
上述の実施形態において、第2サーバ2の制御部21は、交差点の信号現示を推定する第4情報処理を実行してもよい。
図7は、第4情報処理の一例を示す説明図である。図7において、横軸が時刻を表すこと、中抜きドットが複数のプローブ車両3による通過時刻を意味すること、及びt1からt12が交差点通過時刻を意味することは、図4の場合と同様である。
上述の実施形態において、第2サーバ2の制御部21は、交差点の信号現示を推定する第4情報処理を実行してもよい。
図7は、第4情報処理の一例を示す説明図である。図7において、横軸が時刻を表すこと、中抜きドットが複数のプローブ車両3による通過時刻を意味すること、及びt1からt12が交差点通過時刻を意味することは、図4の場合と同様である。
図7において、L1からL4は、交差点に向かうプローブ車両3が通行した流入路(或いは流入方向)を意味する。
GS、TR、及びTLは、当該プローブ車両3による交差点からの流出方向の種別を表す識別情報である。これらの識別情報のうち、「GS」は直進、「TR」は右折、「TL」は左折を意味する。
GS、TR、及びTLは、当該プローブ車両3による交差点からの流出方向の種別を表す識別情報である。これらの識別情報のうち、「GS」は直進、「TR」は右折、「TL」は左折を意味する。
ここでは、交差点への流入路L1からL4のうち、流入路L1,L3が主道路(第1方向)であり、流入路L2,L4が従道路(第2方向)であるとする。
従って、第1時系列データD11は、流入路L1の通過時刻であるt1からt6と、流入路L3の通過時刻であるt9を含む。また、第2時系列データD12は、流入路L2の通過時刻であるt7,t8と、流入路L4の通過時刻であるt11,t12を含む。
従って、第1時系列データD11は、流入路L1の通過時刻であるt1からt6と、流入路L3の通過時刻であるt9を含む。また、第2時系列データD12は、流入路L2の通過時刻であるt7,t8と、流入路L4の通過時刻であるt11,t12を含む。
変形例に係る第4情報処理は、通過時刻t1からt12に交差点にそれぞれ流入したプローブ車両3の流入方向L1からL4及び流出方向GS,TR,TLに基づいて、交差点の信号現示を推定する処理である。図7に示す通り、第4情報処理は、処理PT1と処理PT2を含む。
(処理PT1)
処理PT1は、過去分の第1時系列データD11と過去分の第2時系列データD12に、流入方向L1からL4のイベントと流出方向GS,TR,TLのイベントを付加する処理である。
具体的には、制御部21は、プローブ車両3の走行軌跡から交差点に対する流入方向L1からL4と流出方向GS,TR,TLを判定し、その判定結果をイベントとして各通過時刻t1からt12に付加する。
処理PT1は、過去分の第1時系列データD11と過去分の第2時系列データD12に、流入方向L1からL4のイベントと流出方向GS,TR,TLのイベントを付加する処理である。
具体的には、制御部21は、プローブ車両3の走行軌跡から交差点に対する流入方向L1からL4と流出方向GS,TR,TLを判定し、その判定結果をイベントとして各通過時刻t1からt12に付加する。
従って、例えばイベントL1,GSが付加された通過時刻t1は、流入路L1の停止線を時刻t1に通過しかつ交差点を直進したプローブ車両3が存在したことを意味する。
同様に、イベントL1,TLが付加された通過時刻t2は、流入路L1の停止線を時刻t2に通過しかつ交差点を左折したプローブ車両3が存在したことを意味する。その他の通過時刻t3からt12についても同様である。
同様に、イベントL1,TLが付加された通過時刻t2は、流入路L1の停止線を時刻t2に通過しかつ交差点を左折したプローブ車両3が存在したことを意味する。その他の通過時刻t3からt12についても同様である。
(処理PT2)
処理PT2は、交差点に向かう流入路L1からL4のうち、流出方向のイベントが右折TRである通過時刻t4からt6のみを含む時間帯が所定時間以上である流入路L1を抽出する処理である。
具体的には、制御部21は、第1及び第2時系列データD11,D12に含まれる通過時刻t1からt12の中から、右折TRのイベントが連続する期間Ta,Tbを抽出する。
処理PT2は、交差点に向かう流入路L1からL4のうち、流出方向のイベントが右折TRである通過時刻t4からt6のみを含む時間帯が所定時間以上である流入路L1を抽出する処理である。
具体的には、制御部21は、第1及び第2時系列データD11,D12に含まれる通過時刻t1からt12の中から、右折TRのイベントが連続する期間Ta,Tbを抽出する。
次に、制御部21は、抽出した期間Ta,Tbが下記の条件を充足する場合に、交差点の信号現示に右折専用現示が含まれると推定する。
条件1:期間Ta,Tbが所定時間(例えば10秒)以上であること。
条件2:当該期間Ta,Tb中に、イベントが直進GSである通過時刻のデータが対向道路に存在しないこと。
条件1:期間Ta,Tbが所定時間(例えば10秒)以上であること。
条件2:当該期間Ta,Tb中に、イベントが直進GSである通過時刻のデータが対向道路に存在しないこと。
図4の例では、流入路L1で発生した期間Taにおいて、流入路L3における通過時刻が存在しないので、条件2を充足する。従って、制御部21は、期間Taが10秒以上であれば、流入路L1について右折専用現示が採用されていると判断する。
一方、流入路L4で発生した期間Tbにおいては、流入路L4と対向する流入路L2においてイベントが直進GSである通過時刻t7,t8が存在するので、条件2を充足しない。従って、制御部21は、期間Tbが10秒以上であっても、流入路L4では右折専用現示が採用されていないと判断する。
一方、流入路L4で発生した期間Tbにおいては、流入路L4と対向する流入路L2においてイベントが直進GSである通過時刻t7,t8が存在するので、条件2を充足しない。従って、制御部21は、期間Tbが10秒以上であっても、流入路L4では右折専用現示が採用されていないと判断する。
〔その他の変形例〕
今回開示した実施形態はすべての点で例示であって制限的なものではない。本発明の権利範囲は、上述の実施形態に限定されるものではなく、特許請求の範囲に記載された構成と均等の範囲内でのすべての変更が含まれる。
例えば、上述の実施形態において、信号制御情報S3から信号情報(提供情報S2)を生成する処理とプローブ車両3に信号情報を送信する処理を、第2サーバ2が実行してもよい。
今回開示した実施形態はすべての点で例示であって制限的なものではない。本発明の権利範囲は、上述の実施形態に限定されるものではなく、特許請求の範囲に記載された構成と均等の範囲内でのすべての変更が含まれる。
例えば、上述の実施形態において、信号制御情報S3から信号情報(提供情報S2)を生成する処理とプローブ車両3に信号情報を送信する処理を、第2サーバ2が実行してもよい。
上述の実施形態において、第1サーバ1と第2サーバ2が行う処理を1つのサーバがすべて実行することにしてもよい。
すなわち、第1サーバ1及び第2サーバ2の機能を併有する1つのサーバが、プローブ情報S1の収集、プローブ情報S1からの信号制御情報S3の生成、信号制御情報S3からの信号情報(提供情報S2)の生成、及びプローブ車両3への信号情報の送信を実行してもよい。なお、上記1つのサーバは、信号情報をプローブ車両3以外の車両に送信してもよい。
すなわち、第1サーバ1及び第2サーバ2の機能を併有する1つのサーバが、プローブ情報S1の収集、プローブ情報S1からの信号制御情報S3の生成、信号制御情報S3からの信号情報(提供情報S2)の生成、及びプローブ車両3への信号情報の送信を実行してもよい。なお、上記1つのサーバは、信号情報をプローブ車両3以外の車両に送信してもよい。
1 第1サーバ(情報処理装置)
2 第2サーバ(情報処理装置)
3 プローブ車両
4 車載装置
5 信号灯器
7 無線基地局
8 公衆通信網
11 制御部
12 記憶部
13 通信部
14 同期処理部
15 プローブデータベース
16 提供情報データベース
17 会員データベース
18 コンピュータプログラム
21 制御部
22 記憶部
23 通信部
25 地図データベース
26 プローブデータベース
27 制御情報データベース
28 コンピュータプログラム
29 道路地図データ
31 制御部
32 記憶部
33 通信部
34 同期処理部
35 センサ
36 コンピュータプログラム
100 情報処理システム
S1 プローブ情報
S2 車両向けの提供情報
S3 信号制御情報
2 第2サーバ(情報処理装置)
3 プローブ車両
4 車載装置
5 信号灯器
7 無線基地局
8 公衆通信網
11 制御部
12 記憶部
13 通信部
14 同期処理部
15 プローブデータベース
16 提供情報データベース
17 会員データベース
18 コンピュータプログラム
21 制御部
22 記憶部
23 通信部
25 地図データベース
26 プローブデータベース
27 制御情報データベース
28 コンピュータプログラム
29 道路地図データ
31 制御部
32 記憶部
33 通信部
34 同期処理部
35 センサ
36 コンピュータプログラム
100 情報処理システム
S1 プローブ情報
S2 車両向けの提供情報
S3 信号制御情報
Claims (14)
- 複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶する記憶部と、
前記記憶部に記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定する情報処理を実行する制御部と、を備え、
前記信号制御情報は、
前記交差点のサイクル長及びスプリットを含み、
前記情報処理は、
前記複数のプローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む情報処理装置。 - 前記第1情報処理は、
前記記憶部に記憶された前記プローブ情報の一部であって前記走行時刻が所定期間に含まれる前記プローブ情報に基づいて、前記交差点の第1方向における第1方向通過時刻に関する第1時系列データと、前記第1方向と交差する第2方向の第2方向通過時刻に関する第2時系列データと、を生成する処理を含み、
前記第1方向通過時刻と前記第2方向通過時刻とを用いて、前記交差点の前記サイクル長及び前記スプリットを推定する、請求項1に記載の情報処理装置。 - 前記第1情報処理は、
前記第1時系列データと前記第2時系列データを含みかつ前記第2時系列データのデータ数が最小となる第1期間と、前記第1時系列データと前記第2時系列データを含みかつ前記第1時系列データのデータ数が最小となる第2期間と、の組み合わせを求める処理を含む請求項2に記載の情報処理装置。 - 前記第1情報処理は、
前記第1期間、前記第2期間、及び前記第1期間と前記第2期間の間のギャップ時間に基づいて、前記サイクル長と前記スプリットを算出する処理を含む請求項3に記載の情報処理装置。 - 前記信号制御情報は、
前記交差点のサイクル開始時刻を含み、
前記情報処理は、
複数の前記プローブ車両による前記交差点の前記通過時刻を用いて、前記交差点のサイクル開始時刻を推定する第2情報処理を含む請求項4に記載の情報処理装置。 - 前記プローブ情報は、
前記第2情報処理の実行日に前記プローブ車両の走行時刻が含まれる前記プローブ情報を含み、
前記第2情報処理は、
前記実行日の前記プローブ情報に基づいて、前記第1方向の前記実行日分の前記通過時刻を含む第3時系列データと、前記第1方向と交差する前記第2方向の前記実行日分の前記通過時刻を含む第4時系列データと、を生成する処理を含み、
前記第1方向の前記実行日分の前記通過時刻と、前記第2方向の前記実行日分の前記通過時刻とを用いて、前記交差点の前記サイクル開始時刻を推定する請求項5に記載の情報処理装置。 - 前記第2情報処理は、
前記第1期間が前記第3時系列データと前記第4時系列データを含みかつ前記第1期間が含む前記第4時系列データのデータ数が最小となる条件、及び、前記第2期間が前記第3時系列データと前記第4時系列データを含みかつ前記第2期間が含む前記第3時系列データのデータ数が最小となる条件を満たすように、前記サイクル開始時刻を求める処理を含む請求項6に記載の情報処理装置。 - 前記信号制御情報は、
前記交差点で実行中の交通信号制御の種別を含み、
前記情報処理は、
前記第1期間、前記第2期間、前記ギャップ時間、及び前記サイクル長に基づいて、前記種別を推定する第3情報処理を含む請求項4から請求項7のいずれか1項に記載の情報処理装置。 - 前記第3情報処理は、
前記第1期間、前記第2期間、及び前記サイクル長が一定である期間の多寡に基づいて、前記種別が定周期制御及び集中制御のいずれであるかを判定する処理を含む請求項8に記載の情報処理装置。 - 前記第3情報処理は、
前記ギャップ時間の多寡に基づいて、前記種別が歩車分離制御か否かを判定する処理を含む請求項8又は請求項9に記載の情報処理装置。 - 前記信号制御情報は、
前記交差点の信号現示を含み、
前記情報処理は、
前記通過時刻に前記交差点に流入した前記プローブ車両の流入方向と流出方向に基づいて、前記交差点の信号現示を推定する第4情報処理を含む請求項1から請求項10のいずれか1項に記載の情報処理装置。 - 前記第4情報処理は、
前記通過時刻に前記流入方向及び前記流出方向のイベントを付加する処理と、
前記イベントが右折である前記通過時刻のみを含む時間帯が所定時間以上である流入路を抽出する処理と、を含む請求項11に記載の情報処理装置。 - 情報処理装置が実行する情報処理方法であって、
複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶するステップと、
前記記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定するステップと、を含み、
前記信号制御情報は、
前記交差点のサイクル長及びスプリットを含み、
前記情報処理は、
前記複数の前記プローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含む情報処理方法。 - 複数のプローブ車両の走行位置及び走行時刻を含むプローブ情報を記憶するステップと、
前記記憶された前記プローブ情報に基づいて、交差点に適用中の信号制御情報を推定するステップと、を実行する情報処理装置として、コンピュータを機能させるコンピュータプログラムであって、
前記信号制御情報は、
前記交差点のサイクル長及びスプリットを含み、
前記情報処理は、
前記複数の前記プローブ車両による前記交差点の通過時刻を用いて、前記交差点のサイクル長及びスプリットを推定する第1情報処理を含むコンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023556209A JPWO2023074218A1 (ja) | 2021-11-01 | 2022-09-26 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-178851 | 2021-11-01 | ||
| JP2021178851 | 2021-11-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023074218A1 true WO2023074218A1 (ja) | 2023-05-04 |
Family
ID=86159732
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/035723 WO2023074218A1 (ja) | 2021-11-01 | 2022-09-26 | 情報処理装置、情報処理方法、及びコンピュータプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2023074218A1 (ja) |
| WO (1) | WO2023074218A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11161894A (ja) * | 1997-12-01 | 1999-06-18 | Hitachi Ltd | 交通軌跡監視方法及び装置 |
| JP2015212863A (ja) * | 2014-05-01 | 2015-11-26 | 住友電気工業株式会社 | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム |
-
2022
- 2022-09-26 WO PCT/JP2022/035723 patent/WO2023074218A1/ja active Application Filing
- 2022-09-26 JP JP2023556209A patent/JPWO2023074218A1/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11161894A (ja) * | 1997-12-01 | 1999-06-18 | Hitachi Ltd | 交通軌跡監視方法及び装置 |
| JP2015212863A (ja) * | 2014-05-01 | 2015-11-26 | 住友電気工業株式会社 | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023074218A1 (ja) | 2023-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110546695B (zh) | 用于交通灯的信号相位和定时的综合管理的方法、装置和计算机程序产品 | |
| CN107430819B (zh) | 车辆信息处理装置及车辆信息处理方法 | |
| US9697729B2 (en) | Systems and methods for estimating traffic signal information | |
| Rahmani et al. | Path inference from sparse floating car data for urban networks | |
| Liang et al. | Fuel-saving potentials of platooning evaluated through sparse heavy-duty vehicle position data | |
| US20190001986A1 (en) | Surrounding environment recognition device and computer program product | |
| Miwa et al. | Route identification and travel time prediction using probe-car data | |
| EP2610782A1 (en) | Method for planning the route of a vehicle | |
| JP2014241090A (ja) | 道路状況特定装置 | |
| US11935417B2 (en) | Systems and methods for cooperatively managing mixed traffic at an intersection | |
| CN111006681B (zh) | 一种辅助导航方法、装置、设备和介质 | |
| CN104615897A (zh) | 基于低频gps数据的路段行程时间估算方法 | |
| CN114512007A (zh) | 交叉路口通行协调方法和装置 | |
| US10665096B2 (en) | Non-transitory storage medium storing image transmission program, image transmission device, and image transmission method | |
| CN101807348A (zh) | 一种动态网络导航系统及方法 | |
| US10697787B2 (en) | Detour recommended area estimation system, detour recommended area estimation program, and navigation device | |
| WO2023074218A1 (ja) | 情報処理装置、情報処理方法、及びコンピュータプログラム | |
| US20180276990A1 (en) | Traffic information estimation device and traffic information estimation method | |
| US20110004370A1 (en) | Stop history data accumulation system, accumulation method, and accumulation program | |
| Auer et al. | Traffic services for vehicles: the process from receiving raw probe data to space-time diagrams and the resulting traffic service | |
| JP2018106460A (ja) | 車載装置、車両用情報提供システム、サーバ装置 | |
| KR101550731B1 (ko) | 링크구간 통행속도 산출방법 및 시스템 | |
| WO2023228772A1 (ja) | 走行エネルギー推定装置、走行エネルギー推定方法、及びコンピュータプログラム | |
| JP7174025B2 (ja) | 交通流を最適化するシステム及び方法 | |
| JP4985521B2 (ja) | 停止履歴データ蓄積システム、蓄積方法および蓄積プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22886551 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023556209 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22886551 Country of ref document: EP Kind code of ref document: A1 |