WO2023047495A1 - 入力デバイス - Google Patents
入力デバイス Download PDFInfo
- Publication number
- WO2023047495A1 WO2023047495A1 PCT/JP2021/034846 JP2021034846W WO2023047495A1 WO 2023047495 A1 WO2023047495 A1 WO 2023047495A1 JP 2021034846 W JP2021034846 W JP 2021034846W WO 2023047495 A1 WO2023047495 A1 WO 2023047495A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- input device
- grip
- upper portion
- tracked
- extension
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










































Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a three-dimensional [3D] space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
Definitions
- the present disclosure relates to an input device whose position and orientation are tracked through a camera when in use.
- Japanese Unexamined Patent Application Publication No. 2002-200012 discloses an input device for game operation, which is provided with a spherical tracked point.
- the input device of Patent Document 1 is photographed by a camera attached to a television, for example, and the position and orientation of the input device are calculated from the image.
- a plurality of tracked points arranged at intervals are arranged on the outer surface of the input device, and the position and orientation of the input device are calculated by detecting the positions of the plurality of tracked points through a camera. system is being considered. In such a system, it is important to ensure the visibility of the tracked point by the camera.
- An example of an input device proposed in the present disclosure includes a first portion having a plurality of tracked points each emitting light, a front surface on which an operation member is arranged, and a plane including at least a portion of the front surface. and a second portion extending along the tracked point and having the plurality of tracked points provided thereon.
- this input device it is possible to secure an area (surface area) for arranging the tracked point. As a result, a sufficient number of tracked points can be provided in the input device while ensuring the distance between two adjacent tracked points, and the visibility of the tracked points can be ensured. Moreover, since the direction in which the second portion extends is the direction along the plane including the front surface where the operation member is arranged, the structure of the members constituting the external shape of the input device can be simplified.
- FIG. 1 is a diagram for explaining an example of a system in which an input device proposed in the present disclosure is used;
- FIG. 1 is a front view showing a first example of an input device proposed in the present disclosure;
- FIG. It is a back view which shows the 1st example of an input device.
- It is a left view which shows the 1st example of an input device.
- It is a right view showing the first example of the input device.
- It is a top view showing the 1st example of an input device.
- It is a bottom view showing the first example of the input device.
- FIG. 4 is a front view showing a second example of an input device proposed in the present disclosure;
- It is a rear view showing the second example of the input device.
- It is a left view which shows the 2nd example of an input device.
- FIG. 11 is a plan view showing a second example of an input device; It is a bottom view showing the second example of the input device.
- FIG. 11 is a front view showing a third example of an input device proposed in the present disclosure; It is a rear view showing the 3rd example of an input device.
- FIG. 11 is a left side view showing a third example of an input device;
- FIG. 11 is a right side view showing a third example of the input device;
- FIG. 11 is a plan view showing a third example of an input device; It is a bottom view showing the 3rd example of an input device.
- FIG. 11 is a front view showing a fourth example of an input device proposed in the present disclosure;
- FIG. 11 is a rear view showing a fourth example of an input device; It is a left view which shows the 4th example of an input device. It is a bottom view which shows the 4th example of an input device.
- FIG. 11 is a front view showing a fifth example of an input device proposed in the present disclosure;
- FIG. 11 is a rear view showing a fifth example of an input device;
- FIG. 20 is a left side view showing a fifth example of the input device;
- FIG. 20 is a right side view showing a fifth example of the input device;
- FIG. 11 is a plan view showing a fifth example of an input device; It is a bottom view showing the 5th example of an input device.
- FIG. 11 is a front view showing a fifth example of an input device proposed in the present disclosure;
- FIG. 11 is a rear view showing a fifth example of an input device;
- FIG. 20 is a left side view showing a fifth example of the input device;
- FIG. 20 is a right side view showing
- FIG. 11 is a perspective view showing a sixth example of an input device proposed in the present disclosure
- 7B is a front view of the input device shown in FIG. 7A
- FIG. 7B is a side view of the input device shown in FIG. 7A
- FIG. 7B is a plan view of the input device shown in FIG. 7A
- FIG. 21 is a perspective view showing a seventh example of an input device proposed in the present disclosure
- 8B is a front view of the input device shown in FIG. 8A
- FIG. Figure 8B shows the front side of the input device shown in Figure 8A
- FIG. 3 shows an example of an input device having a ring.
- FIG. 11 shows yet another example of an input device having a ring portion;
- FIG. 11 shows yet another example of an input device having a ring portion
- FIG. FIG. 12 shows an example of an input device having a bulb
- FIG. 11 shows yet another example of an input device having a bulb
- FIG. 2 is a front view of an example input device having an enlarged top
- FIG. 11 is a side view showing still another example of the input device
- the directions indicated by Z1 and Z2 in FIG. 2A are referred to herein as upward and downward, respectively, the directions indicated by X1 and X2 in FIG. 2A are referred to herein as rightward and leftward, respectively, and the directions indicated by Y1 and Y2 in FIG. 2C. are referred to as forward and rearward, respectively. These directions are used to describe the relative positions of the parts, members, elements, etc. that make up the input device, and do not specify the orientation or way of holding the input device during use.
- the input device 100 is used with a head mounted display (HMD) 2, for example.
- HMD head mounted display
- a user wears the HMD 2 on the head and holds the input device 100 in the right and/or left hand.
- the HMD 2 has a forward facing camera 2a.
- the input device 100 is provided with a plurality of tracked points H, which will be described later.
- the position of the tracked point H is detected through the camera 2a, and the position and orientation of the input device 100 (that is, the position and orientation of the user's hand) are calculated based on the detected position of the tracked point.
- the input device 100 has a plurality of operation members (for example, operation buttons, operation sticks, touch sensors, etc.) operated by the user's fingers, as will be described later.
- the display unit of the HMD 2 displays a moving image (for example, game image) generated based on the position and orientation of the input device 100 and the operation performed on the operation member.
- Calculation of the position and orientation of the input device 100 may be performed by an information processing device mounted on the HMD 2, or may be performed by an external information processing device (for example, a game device or a personal computer separate from the HMD 2).
- the input device 100 may have a motion sensor (such as an acceleration sensor or a gyro sensor).
- the information processing apparatus may calculate the position and orientation of the input device 100 based not only on the position of the tracked point H, but also on the output of the motion sensor. Also, the generation of the moving image may be performed by an information processing device mounted on the HMD 2, or may be performed by an external information processing device.
- the image information acquired by the camera 2a is transmitted to the external information processing device wirelessly or by wire, and generated.
- the moving image information is transmitted to the HMD 2 wirelessly or by wire from an external information processing device.
- the input device 100 may be used separately from the HMD 2, unlike the system illustrated in FIG.
- the camera for tracking the position and orientation of the input device 100 is an external display device (for example, a television or a personal computer) that displays a moving image generated based on the position and orientation of the input device 100. monitor).
- the outer shape of the input device for the right hand and the outer shape of the input device for the left hand are symmetrical.
- the number and types of operation members arranged on the input device may be different between the left and right input devices. In this specification, the description will focus on the input device for the right hand.
- the input device 100 has a grip 11 , an upper portion 20 positioned above the grip 11 , and a lower portion 30 positioned below the grip 11 .
- the grip 11 is a portion that the user's palm touches on the side and is held by, for example, the ball of the foot, the middle finger, the ring finger, and the little finger when the user is gripping it.
- the upper part 20 and the lower part 30 are connected to the ends of the grip 11 respectively.
- a plurality of operating members 13 to 16 are provided on the upper portion 20 and positioned above the grip 11 .
- the operating members 13-16 can be operated by, for example, the thumb or index finger.
- an operation stick 13 and operation buttons 14 to 16, for example, are arranged as operation members on the upper portion 20.
- the operation stick 13 and the operation buttons 14 and 15 are arranged on the front surface 21a of the upper portion 20 and are operated with, for example, a thumb.
- the operation stick 13 is an operation member that can be tilted or slid in the radial direction.
- the operation button 16 is arranged on the rear side of the upper portion 20 (see FIG. 2B) and is operated, for example, with the index finger.
- the operation member provided on the upper portion 20 is not limited to the example described here, and may be, for example, a touch sensor, a trigger button, or a button with a touch sensor. Also, the number of operation members provided on the upper portion 20 may be one, two, or four or more.
- the input device 100 has an extension 40 extending from one of the upper portion 20 and the lower portion 30 toward the other and laterally away from the grip 11 .
- the extending portion 40 is curved so as to swell outward in the left-right direction, and the middle portion of the extending portion 40 is separated from the grip 11 .
- the middle portion of the extension portion 40 is separated from the grip 11 to the right.
- a space is provided between the middle portion of the extending portion 40 and the grip 11 so that the user's right hand can be put therein.
- Both ends of extension 40 are connected to upper portion 20 and lower portion 30 respectively, and extension portion 40, upper portion 20, lower portion 30, and grip 11 are generally annular.
- a plurality of tracked points H are arranged on the outer surface of the input device 100 (tracked points are indicated by black circles in the figure). Each tracked point H emits light.
- the input device 100 has, for example, a Light Emitting Diode (LED) as a light source for the tracked point H.
- FIG. A light source may be arranged at each position of the tracked point H, or the position of the light guide tube that guides the light from the light source to the tracked point H (the position of the light exit surface of the light guide tube) is the tracked point H. may correspond to the position of
- LED Light Emitting Diode
- the tracked points H are arranged on each of the extending portion 40, the upper portion 20, the lower portion 30, and the grip 11.
- the tracked points in the extension 40 are given the reference H1
- the tracked points in the upper portion 20 are given the reference H2
- the tracked points in the lower portion 30 are given the reference H3
- a tracked point on the grip 11 is given the reference H4.
- reference H is used for the tracked point.
- the extended portion 40 has a plurality of tracked points H1 on its outer surface (here, the "outer surface” is the surface on the side opposite to the grip 11 in the horizontal direction).
- the tracked points H1 are distributed over the outer surface of the extension 40 .
- the tracked points H1 are arranged vertically in a plurality of rows. In the example of the input device 100, the tracked points H1 are arranged in two rows. The position (height) of the tracked point H1 in the front row is different from the position (height) of the tracked point H1 in the rear row.
- the height of the tracked point H1 in the front row is approximately midway between the heights of the two tracked points H1 in the rear row. This makes it difficult for two tracked points H1 to overlap each other when the tracked point H1 is viewed through the camera 2a.
- the arrangement of the tracked points H1 in the extended portion 40 is not limited to the example shown in the drawing.
- the tracked points H1 may be arranged in one row, or may be arranged in three or more rows.
- the upper portion 20 has a plurality of tracked points H2 on its outer surface. As shown in FIG. 2A, the width W21 of the upper portion 20 in the horizontal direction is larger than the width W11 of the grip 11 when the input device 100 is viewed from the front. This makes it possible to secure the number of tracked points H2 while hiding the distance between two adjacent tracked points H2. As a result, the recognition accuracy of the position and orientation of the input device 100 through the camera 2a can be improved.
- the upper portion 20 has a left protruding portion 20a protruding on the side opposite to the extending portion 40.
- the left projecting portion 20 a projects leftward from the left side surface of the grip 11 .
- This shape of the upper portion 20 makes it easy to secure the area of the region where the tracked point H2 is arranged.
- the upper portion 20 has a right projecting portion 20b projecting rightward from the right side surface of the grip 11. As shown in FIG.
- An extending portion 40 is connected to the right projecting portion 20b.
- top portion 20 may have only one of left protrusion 20a and right protrusion 20b.
- the width W21 of the upper portion 20 in the left-right direction is greater than the width W22 of the upper portion 20 in the front-rear direction (see FIG. 2C). Therefore, it becomes easy to line up the plurality of tracked points H2 in the horizontal direction on the upper portion 20 .
- the "width W22 of the upper portion 20 in the front-rear direction" corresponds to the distance between the front surfaces of the protrusions 20a and 20b and the rear surfaces of the protrusions 20a and 20b.
- the width W22 of the upper portion 20 in the front-rear direction is substantially the same as the width 12 of the grip 11 in the front-rear direction in a side view of the input device 100, or It is smaller than the width W12 (see FIG. 2C).
- the upper portion 20 has a front surface 21a on which a plurality of operating members 13-15 are arranged.
- a plurality of tracked points H2 are arranged along the edge of the front surface 21a.
- the upper portion 20 has a substantially elliptical shape when viewed from the front, and has a curved surface 21c between the edge of the front surface 21a and the edge of the rear surface 21b (the rear surfaces of the protrusions 20a and 20b).
- the curved surface 21c has portions forming the left side, the top surface, and the right side of the upper portion 20 .
- a plurality of tracked points H2 are arranged on the curved surface 21c in a horizontal direction in plan view. For example, the tracked points H2 are arranged in a line in a plan view of the input device 100 .
- the shape of the upper portion 20 and the arrangement of the tracked points H2 are not limited to the shapes described here.
- the upper portion 20 may be rectangular or circular when viewed from the front.
- the tracked point H2 may be arranged not only on the curved surface 21c but also on the front surface 21a or the rear surface 21b.
- the tracked points H2 may be arranged in two or three rows.
- the lower portion 30 has a plurality of tracked points H3 on its outer surface. Therefore, the position and orientation of the input device 100 can be recognized even when the input device 100 is arranged such that the lower portion 30 faces the camera 2a.
- the width W32 of the lower portion 30 in the front-rear direction is larger than the width W12 of the grip 11 when the input device 100 is viewed from the side. This makes it possible to secure the number of tracked points H3 while hiding the distance between two adjacent tracked points H3. As a result, the recognition accuracy of the position and orientation of the input device 100 through the camera 2a can be improved.
- the lower part 30 has a rear protruding part 30a that protrudes rearward from the back surface 12b of the grip 11. This shape of the lower portion 30 makes it easy to secure the area of the region where the tracked point H3 is arranged.
- the lower portion 30 may have a front protrusion projecting forward from the front surface 12 a of the grip 11 instead of or together with the rear protrusion 30 a.
- the width W32 of the lower portion 30 in the front-rear direction is greater than the width W31 of the lower portion 30 in the left-right direction (see FIG. 2A). Therefore, it becomes easy to line up the tracked points H3 in the front-rear direction in the lower portion 30 .
- the width W31 of the lower portion 30 in the horizontal direction is substantially the same as the width W11 of the grip 11 in the horizontal direction when the input device 100 is viewed from the front, or the width W11 of the grip 11 is substantially the same as the width W11 of the grip 11 in the horizontal direction. (see FIG. 2A).
- the lower portion 30 has a curved surface 31c extending from the front surface 12a of the grip 11 through the lower end of the input device 100 to the rear surface 12b of the grip 11.
- the lower portion 30 has a substantially elliptical shape when viewed from the side of the input device 100 , and the curved surface 31 c has portions forming the front surface, the lower surface, and the rear surface of the lower portion 30 .
- the lower portion 30 has tracked points H3 arranged on the curved surface 31c and aligned in the front-rear direction.
- the tracked point H3 is arranged so as to be visible when the input device 100 is viewed from the side.
- a tracked point H3 may also be arranged on the left side surface 31b of the lower portion 30 .
- the shape of the lower portion 30 and the arrangement of the tracked points H3 are not limited to the shapes described here.
- the lower portion 30 may be rectangular or circular in side view.
- the tracked point H3 may be located on the right side surface 31 a of the lower portion 30 .
- a width W21 of the upper portion 20 in the left-right direction is greater than a width W22 of the upper portion 20 in the front-rear direction (see FIG. 2C).
- the width W32 of the lower portion 30 in the front-rear direction is greater than the width W31 of the lower portion 30 in the left-right direction (see FIG. 2A).
- upper portion 20 and lower portion 30 have greater widths in different directions. According to this input device 100, the direction in which the tracked points H2 are arranged in the upper part 20 and the direction in which the tracked points H3 are arranged in the lower part 30 can be made different.
- the tracked point H3 in the other part is used.
- the position and orientation of the input device 100 can be calculated, and the recognition accuracy of the orientation and position of the input device 100 can be improved.
- the relationship between the width of the upper portion 20 and the width of the lower portion 30 is not limited to the example of the input device 100.
- the width W22 of the upper portion 20 in the front-rear direction is greater than the width W21 of the upper portion 20 in the left-right direction
- the width W31 of the lower portion 30 in the left-right direction is greater than the width W32 of the lower portion 30 in the front-rear direction.
- the longitudinal direction of the lower portion 30 may not be the front-rear direction, but may be, for example, a direction that is inclined with respect to both the front-rear direction and the left-right direction.
- the longitudinal direction of the upper portion 20 may not be the left-right direction, but may be a direction inclined with respect to both the front-rear direction and the left-right direction, for example.
- the grip 11 is provided with the tracked point H4.
- the tracked point H4 is deviated to the left with respect to the center line C1 of the grip 11 along the vertical direction (the center line C1 is the left-right direction and front-rear direction of the grip 11). is a straight line passing through the center of ).
- the input device 100 shown in FIG. 2A and the like is a right-handed device.
- the tracked point H4 When gripping the grip 11 with the right hand, the right side of the grip 11 is covered by the hand, while the left side of the grip 11 is partially exposed from the hand. Therefore, according to this arrangement of the tracked point H4, it is possible to prevent the tracked point H4 from being covered by the hand. Although the tracked point H4 is shifted to the left with respect to the center line C1, it may intersect the center line C1. In the left-handed input device, the tracked point H4 is preferably deviated to the right with respect to the center line C1 passing through the center of the grip 11 .
- the tracked point H4 is shifted forward with respect to the center line C1 extending in the vertical direction. That is, the tracked point H4 is deviated from the center line C1 in the direction in which the operating member protrudes.
- This arrangement of the tracked point H4 can effectively prevent the tracked point H4 from being covered by the hand.
- the tracked point H4 is forwardly away from the centerline C1 and does not intersect the centerline C1.
- the tracked point H4 is arranged so as to be visible both when the input device 100 is viewed from the front and when viewed from the side (left side).
- the tracked point H4 is located below the center C3 of the grip 11 in the vertical direction. This arrangement of the tracked point H4 can more effectively prevent the tracked point H4 from being covered by the hand.
- a plurality of tracked points H4 may be arranged on the grip 11.
- the number of tracked points H4 placed on the grip 11 is less than the number of tracked points H2 placed on the upper part 20 and less than the number of tracked points H3 placed on the lower part 30 .
- two tracked points H4 are vertically spaced apart.
- the light source of the tracked point H is, for example, a Light Emitting Diode (LED).
- the input device 100 has, for example, multiple substrates (not shown) on which LEDs are mounted.
- the substrate is, for example, a rigid substrate on which one or more LEDs are mounted.
- the rigid substrate is, for example, a paper phenol substrate, a paper epoxy substrate, a glass epoxy substrate, or the like.
- the rigid substrate is arranged such that the positions of the plurality of LEDs correspond to the positions of the plurality of tracked points H, respectively.
- the input device 100 may have a cover that constitutes its outer surface and covers the LEDs and the rigid substrate.
- the cover is a member that is entirely light transmissive or a member that is light transmissive only at the position of the tracked point H.
- FIG. The LED light passes through the position of the tracked point H on the cover.
- the input device 100 may have a light guiding member that guides the light of the LED to the position of the tracked point H on the cover.
- the board on which the LED is mounted may be a flexible board.
- the input device 100 may have a frame, and the flexible substrate may be curved along the surface of the frame. The flexible substrate and frame may then be covered by the cover described above.
- FIGSecond example 3A-3F are diagrams showing an input device 200, which is a second example of an input device.
- the differences between the input device 100 and the input device 200 are mainly described.
- the structure of the input device 100 may be applied to matters that are not described regarding the structure of the input device 200 .
- the input device 200 has a grip 211, an upper portion 220, a lower portion 230, and an extension portion 240, similar to the input device 100.
- the extended portion 240 is provided with a plurality of tracked points H1
- the upper portion 220 is provided with a plurality of tracked points H2
- the lower portion 230 is provided with a plurality of tracked points H3.
- the width W21 of the upper portion 220 in the horizontal direction is larger than the width 11 of the grip 211 when the input device 200 is viewed from the front.
- the upper portion 220 has a left protruding portion 220 a , unlike the example of the input device 100 , it does not have a portion protruding rightward from the right side surface of the grip 211 .
- a width W21 of the upper portion 220 in the left-right direction is greater than a width W22 of the upper portion 220 in the front-rear direction (see FIG. 3C).
- the "width W22 of the upper portion 220 in the front-rear direction" corresponds to the distance between the front surface of the projection 220a and the rear surface of the projection 220a.
- the input device 200 differs from the input device 100 in the lower posture. Specifically, as shown in FIG. 3A, the width W31 of the lower portion 230 in the horizontal direction is larger than the width W11 of the grip 211 when the input device 200 is viewed from the front.
- the lower portion 230 has a left protrusion 230a.
- the lower portion 230 does not have a portion that projects rightward beyond the right side surface of the grip 211 .
- a width W31 of the lower portion 230 in the left-right direction is greater than a width W32 of the lower portion 230 in the front-rear direction (see FIG. 3C). Therefore, it becomes easy to align the tracked points H2 in the horizontal direction on the lower portion 230 .
- the upper portion 220 and the lower portion 230 have large widths in the same direction (ie, left-right direction).
- the tracked point H4 is arranged on the grip 211.
- the position of the tracked point H4 is the same as that of the input device 100, and as shown in FIG. 3A, the tracked point H4 is shifted to the left with respect to the vertical center line C1. Also, as shown in FIG. 3C, the tracked point H4 is shifted forward with respect to the center line C1 extending in the vertical direction. Furthermore, the tracked point H4 is located below the center of the grip 211 in the vertical direction.
- the number of tracked points H4 arranged on the grip 211 is one. The number of tracked points H4 may be two or more.
- FIGS. 4A-4F are diagrams showing an input device 300, which is a third example of an input device.
- differences between the input devices 100 and 200 and the input device 300 will be mainly described.
- the structure of the input devices 100 and 200 may be applied to items that are not described regarding the structure of the input device 300 .
- the input device 300 has a grip 311 , an upper portion 320 and a lower portion 330 .
- a plurality of tracked points H2 are provided in the upper portion 320 and a plurality of tracked points H3 are provided in the lower portion 330 .
- the input device 300 does not have portions corresponding to the extension portions 40 and 240 of the input devices 100 and 200. Therefore, upper portion 320 and lower portion 330 are connected only via grip 311 .
- the input device 300 has a plane P (see FIG. 3A) that is orthogonal to the grip 311 and does not intersect with the input device 300 at sites other than the grip 311 . According to this shape of the input device 300, the number of parts of the input device 300 (the number of parts forming the frame of the input device 300) can be reduced.
- the width W21 of the upper portion 320 in the horizontal direction is larger than the width W11 of the grip 311 when the input device 300 is viewed from the front.
- the upper portion 320 has a left protruding portion 320a protruding leftward from the left side surface of the grip 311 and a right protruding portion 320b protruding rightward from the right side surface of the grip 311 . More specifically, the right protruding portion 320b obliquely protrudes rightward and upward.
- a width W21 of the upper portion 320 in the left-right direction is greater than a width W22 of the upper portion 320 in the front-rear direction (see FIG. 4C).
- the "width W22 of the upper portion 320 in the front-rear direction" corresponds to the distance between the front surfaces of the protrusions 320a and 320b and the rear surfaces of the protrusions 320a and 320b. Further, as shown in FIG. 4C, the width W22 of the upper portion 320 in the front-rear direction is substantially the same as the width W12 of the grip 311 in the front-rear direction, or is smaller than the width W12 of the grip 311 .
- the upper portion 320 has a front surface 321a, a rear surface 321b, and a curved surface 321c.
- a plurality of tracked points H2 are arranged on each of the front surface 321a, the rear surface 321b, and the curved surface 321c.
- a plurality of tracked points H2 (three tracked points H2) are arranged in the horizontal direction on the front surface 321a.
- a plurality of tracked points H2 are also arranged in the horizontal direction on the curved surface 321c (see FIG. 4).
- the back surface 321b has two tracked points H2 arranged on opposite sides of the grip 311. As shown in FIG.
- the front surface 321a has a region R1 (operating member region) in which a plurality of operating members 13 to 15 are arranged and a region R2 (tracking region) in which a plurality of tracked points H2 are arranged.
- the tracked region R2 is a region (region above the operating member region R1) farther from the grip 311 than the operating member region R1, and surrounds part of the outer edge of the operating member region R1. This makes it easier to secure the area of the tracked region R2, so it becomes easier to secure the number of the tracked points H2 to be arranged in the tracked region R2.
- the front surface 321a has a step 321g formed between the operating member region R1 and the tracked region R2. According to this, the step 321g can prevent the fingers operating the operation members 13 to 15 from overlapping the tracked point H2.
- the front surface 321a protrudes forward from the operating member region R1 in the tracked region R2 due to the step 321g. According to this, the step 321g can prevent the fingers operating the operation members 13 to 15 from entering the tracked region R2.
- the tracked points H2 on the front surface 321a are arranged along the edge of the operating member region R1 so as to surround the operating member region R1.
- the front surface 321a has a tracked point H2 positioned above the operating member region R1 and a tracked point H2 positioned on the right side of the operating member region R1.
- a step 321g is also formed to surround the operation member region R1.
- the step 321g also includes a portion located above the operation member region R1 and a portion located on the right side of the operation member region R1. Note that the arrangement of the tracked point H2 and the step 321g on the front surface 321a may be applied to other input devices disclosed herein.
- the width W31 of the lower portion 330 in the horizontal direction is larger than the width W11 of the grip 311 when the input device 300 is viewed from the front.
- the lower portion 330 has a left protruding portion 330 a protruding leftward from the left side surface of the grip 311 and a right protruding portion 330 b protruding rightward from the right side surface of the grip 311 .
- a width W31 of the lower portion 330 in the left-right direction is greater than a width W32 of the lower portion 330 in the front-rear direction (see FIG. 4C). Therefore, it becomes easy to arrange the tracked points H3 in the horizontal direction in the lower part 230 .
- the width W32 of the lower portion 230 in the front-rear direction is larger than the width 12 of the grip 311 in the front-rear direction when the input device 100 is viewed from the side.
- the lower portion 330 has a front surface 331a, a rear surface 331b, and a curved surface 331c.
- a plurality of tracked points H3 are arranged on each of the front surface 331a, the rear surface 331b, and the curved surface 331c.
- a plurality of tracked points H2 are arranged in two rows on the curved surface 321c.
- FIGS. 5A-5F are diagrams showing an input device 400, which is a fourth example of an input device.
- differences between the input devices 100 to 300 and the input device 400 are mainly described.
- the structures of the input devices 100 to 300 may be applied to items that are not described with respect to the structure of the input device 400 .
- the input device 400 has a grip 411, an upper portion 420 and a lower portion 430.
- a plurality of tracked points H are provided on each of the upper portion 420 and the lower portion 430 .
- a tracked point H4 is also arranged on the lower portion of the grip 411 .
- the input device 400 also has an extension 440 extending laterally from the top 420, as shown in FIG. 5A. Extensions 440 extend laterally from upper portion 420 and curve downward. The extension 440 does not reach the lower portion 430 unlike the example of the input device 100 . Therefore, the input device 400 has a plane P (see FIG. 5A) that is perpendicular to the grip 411 and does not intersect with the input device 400 at the portions other than the grip 411 .
- a plurality of tracked points H1 are arranged on the extension portion 440 .
- the tracked points H1 are arranged in the horizontal direction on the extended portion 440 .
- the tracked points H1 may be arranged in one line, or may be arranged in a plurality of lines.
- the input device 400 may have extensions extending laterally from the lower portion 430 instead of or together with the extensions 440 , unlike the example shown in the figures.
- the extension may extend laterally from lower portion 430 and curve upward.
- the tracked point H4 may also be arranged on this extension.
- FIGS. 6A-6F are diagrams showing an input device 500, which is a fifth example of an input device.
- the structures of the input devices 100 to 400 may be applied to items that are not described with respect to the structure of the input device 500 .
- 6A to 6F the cover forming the outer surface of the input device 500 is removed, and the frame arranged inside the cover and the flexible substrate 550 arranged along the frame are exposed.
- the input device 500 has a grip 511 , an upper portion 520 and a lower portion 530 .
- a plurality of tracked points H are provided on each of the upper portion 520 and the lower portion 530 .
- the input device 500 also has an extension 540 extending from one of the upper portion 520 and the lower portion 530 toward the other and laterally away from the grip 511 .
- the extending portion 540 is curved so as to swell outward in the left-right direction, and the middle portion of the extending portion 540 is separated from the grip 511 .
- the middle portion of the extended portion 540 is separated from the grip 511 to the left.
- a plurality of tracked points H1 are arranged on the extension portion 540 .
- the input device 500 has a flexible substrate 550.
- a plurality of LEDs 551 that are light sources for the tracked point H are mounted on a flexible substrate 550 .
- It has frames Fm2, Fm3, and Fm4 of the input device 500 .
- the frame Fm includes an upper portion 520 , a lower portion 530 and an extension portion 540 .
- the flexible substrate 550 is arranged along the frame Fm. In the example of input device 500 , flexible substrate 550 extends from top portion 520 through extension 540 to bottom portion 530 . That is, the flexible substrate 550 includes a portion 550a (see FIG.
- a plurality of LEDs 551 are arranged at positions of a plurality of tracked points H, respectively. In this way, all of the LEDs 551 located in the upper portion 520 , the lower portion 530 and the extension portion 540 are mounted on one flexible substrate 550 . As a result, the number of components of the input device 500 can be reduced.
- the number of flexible substrates 550 does not have to be one.
- one flexible substrate may be placed on top 520 and extension 540 and another flexible substrate may be placed on bottom 530 .
- one flexible substrate may be placed on the lower portion 530 and the extension portion 540 and another flexible substrate may be placed on the upper portion 520 .
- the flexible substrate 550 has a plurality of projecting portions 550s on which a plurality of LEDs 551 are respectively mounted, and a main extension portion 550A connecting the plurality of projecting portions 550s.
- this main extension 550A extends from upper portion 520 to lower portion 530.
- the protrusion 550s is formed on each of two edges of the main extension 550A located on opposite sides.
- the protruding portion 550s protrudes toward the position of the tracked point H from the edge of the main extending portion 550A.
- the flexible substrate 550 in other words, the main extension portion 550A
- the protrusions 550s are formed, for example, at the front edge and the rear edge of the main extension portion 550A arranged in the extension portion 540 .
- the projections 550a formed on the front edge and the projections 550a formed on the rear edge are alternately arranged.
- the main extension 550A and/or the protrusion 550s may be attached to the frames Fm2, Fm3, Fm4, for example, by screws.
- a portion of the flexible substrate 550 is connected to a circuit board housed inside the input device 500 .
- the frame of the input device 500 may be formed with an opening through which a portion of the flexible substrate 550 passes toward the inside of the input device 500 .
- an opening 522 is formed in the frame Fm of the upper portion 520, as shown in FIG. 6D.
- the upper portion 520 and the lower portion 530 have large widths in different directions. Specifically, the width W21 of the upper portion 520 in the left-right direction (see FIG. 6A) is greater than the width W22 of the upper portion 520 in the front-rear direction (see FIG. 6D). On the other hand, the width W32 of the lower portion 530 in the front-rear direction (see FIG. 6D) is greater than the width W31 of the lower portion 530 in the left-right direction (see FIG. 6A). Therefore, the direction in which the tracked points H2 are arranged in the upper portion 220 and the direction in which the tracked points H3 are arranged in the lower portion 530 can be made different. As shown in FIG.
- the portion 550a (the portion along the upper portion 520) of the flexible substrate 550 extends laterally along the curved surface 521c of the upper portion 520. As shown in FIG. As shown in FIG. 6F, the portion 550c (the portion along the lower portion 530) of the flexible substrate 550 extends along the curved surface 531c of the lower portion 530 in the front-rear direction.
- the relationship between the width of the upper portion 520 and the width of the lower portion 530 is not limited to that described here.
- upper portion 520 and lower portion 530 may have greater widths in the same direction (eg, left-right direction).
- the flexible substrate 550 may be applied to other examples of input devices (input devices 100 to 400 described above).
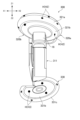
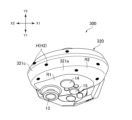
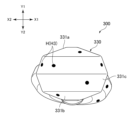
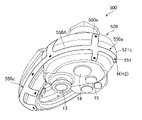
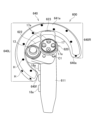
- FIGSixth example 7A-7D are diagrams showing an input device 600, which is a sixth example of an input device.
- differences between the input devices 100 to 500 and the input device 600 will be mainly described.
- the structures of the input devices 100 to 500 may be applied to items that are not described with respect to the structure of the input device 600 .
- the input device 600 has a grip 611 and an upper portion 620 located above the grip 611 .
- the grip 611 is a portion that the user's palm touches on the side and is held by, for example, the ball of the foot, the middle finger, the ring finger, and the little finger when the user holds it.
- Upper portion 620 is located at the upper end of grip 611 .
- a plurality of operating members 13 , 16 , 17 are provided on the upper portion 620 and are located above the grip 611 .
- the operating members 13, 16, 17 can be operated, for example, with a thumb or forefinger.
- the upper part 620 has, for example, the operation stick 13 and the operation buttons 16 and 17 as operation members.
- the operation stick 13 and the operation button 17 are arranged on the front surface 621a of the upper portion 620, and are operated by the thumb, for example.
- the operation stick 13 is an operation member that can be tilted or slid in the radial direction.
- the operation button 17 has, for example, four buttons 17a to 17d positioned at the ends of a cross.
- the operation button 16 is arranged on the rear side of the upper portion 620 (see FIG. 7C) and is a trigger button operated by the index finger, for example.
- the operation member provided on the upper portion 620 is not limited to the example described here, and may be, for example, a touch sensor or a button with a touch sensor. Also, the number of operating members provided on the upper portion 620 may be one.
- the grip 611 may also be provided with one or more operation buttons 18a.
- operation buttons 18a arranged vertically are provided on the left side surface of the grip 611 . These three operation buttons 18a can be operated with, for example, the middle finger, ring finger, and little finger.
- the input device 600 has an extension 640 as shown in FIG. 7A.
- a plurality of tracked points H are arranged on the outer surface of the extending portion 640 (the tracked points are indicated by black circles in the figure).
- the extension portion 640 includes a plurality of tracked points H arranged on a front surface 641a of the extension portion 640, a plurality of tracked points H arranged on a rear surface 641c (see FIG. 7C) of the extension portion 640, and the front surface 641a. and a plurality of tracked points H located on a surface 641b (see FIG. 7C) between the rear surface 641c.
- a plurality of tracked points H are distributed throughout the extension 640 .
- a region (surface area) for arranging the tracked point H can be secured.
- a sufficient number of tracked points H can be provided on the input device 600 while ensuring the distance between two adjacent tracked points H.
- FIG. This makes it possible to improve the recognition accuracy of the orientation and position of the input device.
- the tracked point H is provided only on the extension 640 .
- the tracked points H may be provided on the outer surface of the upper portion 620 (including the front surface 621a) and/or the outer surface of the grip 611, for example.
- a light source for the tracked point H for example, a Light Emitting Diode (LED) is used.
- a light source may be positioned at each of the tracked point H positions.
- the light of the light source may be guided by a light guide to the position of the point H to be tracked.
- the extending portion 640 extends along a plane P1 (see FIG. 7C) including the front surface 621a of the upper portion 620. More specifically, as shown in FIG. 7C, the front surface 621a of the upper portion 620 obliquely extends downward and rearward from the upper end of the front surface 621a when the input device 600 is viewed from the side. The extending portion 640 also extends obliquely downward and rearward from the upper end of the extending portion 640 in the side view of the input device 600 .
- the structure of the member (housing) constituting the external appearance of the input device 600 can be simplified compared to, for example, a configuration in which the extending portion 640 extends in a direction orthogonal to the front surface 621a of the upper portion 620.
- FIG. the member forming the front surface 621a of the upper portion 620 and the member forming the front surface 641a of the extension portion 640 can be integrated.
- the extension 640 includes an arcuate portion extending in a direction along the plane P1 including the front surface 621a of the upper portion 620. As shown in FIG. In the example of input device 600, extension 640 is entirely arcuate. This shape of the extension portion 640 makes it easy to secure the length of the extension portion 640 . As a result, it becomes easy to secure a region (surface area) for arranging the tracked point H.
- the plane P1 may be a plane that includes only a portion of the front surface 621a.
- a convex portion 623 (see FIG. 7A) is formed at the upper end of the upper portion 620 (in other words, the boundary between the front surface 621a and the extension portion 640). This convex portion 623 can prevent the user's finger from reaching the extending portion 640 and covering any of the tracked points H.
- FIG. 7A A convex portion 623 (see FIG. 7A) is formed at the upper end of the upper portion 620 (in other words, the boundary between the front surface 621a and the extension portion 640). This convex portion 623 can prevent the user's finger from reaching the extending portion 640 and covering any of the tracked points H.
- the extension 640 is connected to the upper side of the upper portion 620, as shown in FIG. 7B.
- the extending portion 640 has a portion 640R extending rightward from the upper portion 620 and a portion 640L extending leftward from the upper portion 620. As shown in FIG. (Hereinafter, the portion 640R will be referred to as the right extension portion and the portion 640L will be referred to as the left extension portion.)
- the extension portion 640 extends both to the right and to the left from the upper portion 620. It becomes easier to secure the length of the portion 640 .
- each of the right extension portion 640R and the left extension portion 640L is arcuate.
- the right extending portion 640R extends rightward from the upper portion 620 and curves downward.
- the left extending portion 640L extends leftward from the upper portion 620 and curves downward.
- the length of the right extension portion 640R can be secured while suppressing the size of the right extension portion 640R in the horizontal direction and the size in the vertical direction.
- the length of the left extension portion 640L can be ensured while suppressing the size in the horizontal direction and the size in the vertical direction of the extension portion 640L.
- right extension 640R and left extension 640L have a common center point C1. That is, the right extending portion 640R and the left extending portion 640L extend along an imaginary arc formed around one central point C1. The extended portion 640 is formed over 180 degrees or more along an imaginary arc.
- both the end 640e of the right extension 640R and the end 640f of the left extension 640R are not connected to the grip 611.
- either the end 640 e of the right extension 640 R or the end 640 f of the left extension 640 R may be connected to the grip 11 .
- end 640 f of left extension 640 may be connected to grip 611 .
- the right extending portion 640R is formed to cover the right side surface of the upper portion 620. As shown in FIG. A right side surface 611a of the grip 611 is not covered with the right extension portion 640R. In other words, the position of the end portion 640 e of the right extension portion 640 R is higher than the right side surface 611 a of the grip 611 . Therefore, the right extending portion 640R of the extending portion 640 does not become an obstacle when the user grips the grip 611 with the right hand or removes the right hand from the grip 611 .
- the left extending portion 640L is formed to cover the left side surface of the upper portion 620.
- top portion 620 has a protrusion 622 extending to the left.
- the projecting portion 622 is connected to the middle portion of the left extending portion 640L.
- extension 640 connects to upper portion 620 at two locations. According to this structure, the support strength of the extending portion 640 can be improved.
- the left extension portion 640L is longer than the right extension portion 640R.
- the position of the end portion 640f of the left extending portion 640L is lower than the height of the upper end of the grip 11.
- the end portion 640f of the left extension portion 640L is positioned forward of the button 18a provided on the grip 611. As shown in FIG. Therefore, when the user grips the grip 611 with the right hand, the length of the left extension portion 640L can be sufficiently secured while preventing the left extension portion 640L from interfering with the fingers of the right hand.
- extension 640 is not limited to the example of the input device 600.
- extension 640 may have a portion that extends linearly.
- the front surface 641a of the extending portion 640 and the front surface 621a of the upper portion 620 do not necessarily have to be positioned on the common plane P1.
- the front surface 641a of the extending portion 640 may be located on a plane that is forward of and parallel to the plane P1 that includes the front surface 621a of the upper portion 620 .
- the center point of the right extension portion 640R and the center point of the left extension portion 640L may be different.
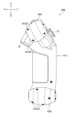
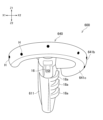
- FIGS. 8A-8C are diagrams showing an input device 700, which is a seventh example of an input device.
- differences between the input device 600 and the input device 700 will be mainly described.
- the structures of the input device 600 and the other input devices 100 to 500 may be applied to items that are not described regarding the structure of the input device 700 .
- the input device 700 includes a grip 711, an upper portion 720 provided with a plurality of operating members 13, 16, 17, and an extension portion 740 provided with a plurality of tracked points H. have.
- the extending portion 740 extends rightward from the upper portion 720 and curves downward. An end portion of the extending portion 40 is connected to the lower end of the grip 711 .
- grip 711, upper portion 720 and extension 740 are generally annular. The user can put his right hand between the extension 740 and the grip 711 .
- the strength and durability of the input device 700 can be improved.
- the structure of the member (housing) that forms the appearance of the input device 700 can be simplified.
- the input device 700 does not have a portion extending leftward from the upper portion 720, unlike the input device 100 described above.
- extension part 740 extends along a plane including the front surface 721 a of the upper part 720 .
- Front surface 741 a of extension 740 lies in a common plane with front surface 721 a of upper portion 720 .
- front surface 741a of extension 740, front surface 721a of upper portion 720, and front surface 711a of grip 711 lie on a common plane. Therefore, the structure of the member (housing) forming the appearance of the input device 700 can be further simplified.
- the entire extending portion 740 is arcuate extending in the direction along the front surface 721 a of the upper portion 720 . According to this shape of the extending portion 740, the length of the extending portion 740 can be ensured while suppressing an increase in the size of the extending portion 740 in the left-right direction.
- the shape of the input device 700 is not limited to the example shown in the drawing, and for example, the extending portion 740 may extend in a direction intersecting a plane including the front surface 721a of the upper portion 720. Also, the front surface 721a of the upper portion 720 may be curved. In this case, extension 740 may extend along a plane that includes only a portion of front surface 721a.
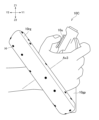
- FIG. 9 is a diagram showing the input device 10A.
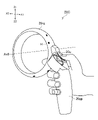
- FIG. 10 is a diagram showing the input device 10B.
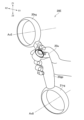
- 11A and 11B are diagrams showing the input device 10C.
- the structures/elements of the input devices 100-700 described above may be combined with the structures/elements of the input devices 10A-10C.
- Each of the input devices 10A, 10B, and 10C has a grip 10gp, an upper portion 10u provided with a plurality of operating members, and an annular portion (extended portion) 10rg provided with a plurality of tracked points H. ing.
- the upper portion 10u and the grip 10gp are arranged inside the annular portion 10rg.
- the upper end of the upper portion 10u is connected to the inner surface of the annular portion 10rg, and the lower end of the grip 10gp is also connected to the inner surface of the annular portion 10rg.
- the annular portion 10rg has a circular shape centered on the center line Ax1.
- the centerline Ax1 is a straight line along a plane perpendicular to the horizontal direction.
- the upper portion 10u and the grip 10gp are arranged inside the annular portion 10rg.
- the upper end of the upper portion 10u is connected to the inner surface of the annular portion 10rg, and the lower end of the grip 10gp is also connected to the inner surface of the annular portion 10rg.
- the annular portion 10rg has a circular shape centered on the center line Ax2.
- the center line Ax2 is a straight line along the horizontal direction.
- the annular portion 10rg has a circular shape centered on the center line Ax3 (see FIG. 11A).
- the centerline Ax3 is a straight line along a plane perpendicular to the horizontal direction.
- the center line Ax3 is a line extending diagonally forward and upward.
- the lower end of the grip 10gp is connected to the inner surface of the annular portion 10rg.
- the upper end of the annular portion 10rg is separated forward from the upper portion 10u.
- FIG. 12 is a diagram showing the input device 20A.
- FIG. 13 is a diagram showing the input device 20B.
- FIG. 14 is a diagram showing the input device 20C.
- FIG. 15 is a diagram showing the input device 20D.
- FIG. 16 is a diagram showing the input device 20E.
- the structures/elements of the input devices 100-700 described above may be combined with the structures/elements of the input devices 20A-20E.
- Each of the input devices 20A to 20E has a grip 20gp, an upper portion 20u provided with a plurality of operating members, and an annular portion (extended portion) 20rg provided with a plurality of tracked points H. .
- the upper portion 20u is arranged outside the annular portion 20rg. More specifically, the annular portion 20rg is positioned above the upper portion 20u, and the upper portion 20u is connected to the outer surface (lower side of the outer surface) of the annular portion 20rg.
- the annular portion 20rg has a circular shape centered on the center line Ax4.
- the centerline Ax4 is a straight line along a plane perpendicular to the horizontal direction. Specifically, the center line Ax4 is a line obliquely extending upward and rearward.
- the upper portion 20u is arranged outside the annular portion 20rg. More specifically, the annular portion 20rg is positioned above the upper portion 20u, and the upper portion 20u is connected to the outer surface of the annular portion 20rg.
- the annular portion 20rg has a circular shape centered on the center line Ax5. In the input device 20B, the center line Ax5 is a straight line along the horizontal direction.
- the upper portion 20u is arranged outside the annular portion 20rg.
- the annular portion 20rg is positioned on the front side of the upper portion 20u, and the upper portion 20u is connected to the outer surface (rear side of the outer surface) of the annular portion 20rg.
- the annular portion 20rg has a circular shape centered on the center line Ax6.
- the center line Ax6 is a straight line along the horizontal direction.
- the center line Ax7 is a straight line along a plane perpendicular to the horizontal direction. Specifically, the center line Ax7 is a straight line generally extending in the vertical direction.
- the annular portion 20rg is positioned above the upper portion 20u, and the upper portion 20u is connected to the front portion of the annular portion 20rg.
- a grip 20gp is positioned below the annular portion 20rg.
- the input device 20E (see FIG. 16) has an annular portion 21rg in addition to the annular portion 20rg described above.
- the annular portion 21rg is positioned below the grip 20gp and connected to the grip 20gp.
- the annular portion 21rg has a circular shape centered on the center line Ax8.
- the center line Ax8 is a straight line along the horizontal direction.
- the annular portion 20rg connected to the upper portion 20u has an annular shape centered on the center line Ax5 along the left-right direction, as in the example of the input device 20B.
- FIG. 17 is a diagram showing the input device 30A.
- the input device 30A has a grip 30gp, an upper portion 30u provided with a plurality of operating members, and an extension portion 30x provided with a plurality of tracked points H.
- the extending portion 30x is connected to the upper side of the upper portion 30u.
- the extending portion 30x is formed to cover the right side and left side of the upper portion 30u.
- the extending portion 30x includes a right portion 30R that extends rightward from the upper portion 30u and curves downward, and a right portion 30R that extends leftward from the upper portion 30u and curves downward. and a left portion 30L.
- the right portion 30R covers the right side of the upper portion 30u
- the left portion 30L covers the left side of the upper portion 30u.
- the lower end of the right portion 30R and the lower end of the left portion 30L may be positioned forward or rearward of the grip 30gp.
- the structures/elements of the input devices 100 to 700 described above may be combined with the structure/gist of the input device 30A.
- FIG. 18 is a diagram showing the input device 30B.
- the input device 30B has a grip 30gp, an upper portion 30u provided with a plurality of operating members, and an extension portion 30y provided with a plurality of tracked points H.
- the extending portion 30y is formed to cover the right side and left side of the upper portion 30u.
- the extending portion 30y has a triangular shape when the input device 30B is viewed from the front, and the upper portion 30u is located inside the extending portion 30y.
- the extending portion 30y is formed such that its top portion is positioned above the upper portion 30u.
- the right portion of the extending portion 30y connects to the right side of the upper portion 30u, and the left portion of the extending portion 30y connects to the left side of the upper portion 30.
- the structures/elements of the input devices 100 to 700 described above may be combined with the structure/gist of the input device 30B.
- FIG. 19A and 19B are diagrams showing the input device 40A.
- the input device 40A has a grip 40gp, an upper portion 40u provided with a plurality of operating members, and an umbrella portion 40m provided with a plurality of tracked points H.
- FIG. 40 m of umbrella parts are shapes which comprise a part of spherical surface.
- a plurality of tracked points H are arranged on the outer surface of the umbrella portion 40m.
- the umbrella portion 40m covers the upper portion 40u (see FIG. 19B) and the upper portion of the grip 40gp. More specifically, the umbrella portion 40m covers, for example, the front and side surfaces of the upper portion 40u and the upper front and side surfaces of the grip 40gp.
- the tracked point H arranged on the umbrella section 40m can be appropriately detected through the camera mounted on the HMD 2.
- FIG. the upper end of the upper portion 40u is connected to the inner surface of the umbrella portion 40m.
- the structures/elements of the input devices 100 to 700 described above may be combined with the structure/substance of the input device 40A.
- FIG. 20 is a diagram showing the input device 50A.
- FIG. 21 is a diagram showing an input device 50B.
- Each of the input devices 50A and 50B has a grip 50gp, an upper portion 50u provided with a plurality of operating members, and a spherical portion 50s provided with a plurality of tracked points H.
- a plurality of tracked points H are distributed and arranged on the outer surface of the spherical portion 50s.
- the ball portion 50s is attached to the upper end of the upper portion 50u.
- the input device 50B (see FIG. 21) has a spherical portion 51s in addition to the spherical portion 50s.
- a plurality of tracked points H are dispersedly arranged on the outer surface of the spherical portion 51s.
- the ball portion 51s is attached to the lower end of the grip 50gp.
- the structures/elements of the input devices 100 to 700 described above may be combined with the structures/substances of the input devices 50A and 50B.
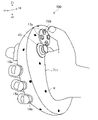
- FIG. 22 is a diagram showing the input device 60A.
- the input device 60A has a grip 60gp, an upper portion 60u provided with a plurality of operating members, and an enlarged upper portion 60m provided with a plurality of tracked points H.
- a plurality of tracked points H are distributed and arranged on the outer surface of the enlarged upper portion 60m.
- the enlarged upper portion 60m is attached to the upper end of the upper portion 60u.
- the enlarged upper portion 60m bulges to the right and has a portion 60n positioned to the right with respect to the right side surface of the upper portion 60u.
- the enlarged upper portion 60m has a recess 60p in its center.
- the input device 60A has a tracked point H under the grip portion 60gp.
- the structures/elements of the input devices 100 to 700 described above may be combined with the structure/gist of the input device 60A.
- FIG. 23 is a diagram showing the input device 70A.
- the input device 70A has a cylindrical shape, and a hand can be put inside it.
- the input device 70A surrounds the user's wrist when in use.
- the input device 70A may have an opening 70a for receiving the thumb.
- a plurality of tracked points H are distributed and arranged on the outer surface of the input device 70A.
- the structures/elements of the input devices 100 to 700 described above may be combined with the structure/gist of the input device 70A.
- the input devices 100 to 500 include grips 11, 211, 311, 411, and 511 extending in the vertical direction, and operation members 13 to 15 positioned above the grips and operated with fingers. and a lower portion 30, 230, 330, 430, 530 located below the grip and having a plurality of tracked points H (H3) arranged thereon. ing.
- the width of the lower portion in a direction intersecting the vertical direction is greater than the width of the grip in the same direction. Therefore, it becomes easy to arrange many tracked points H in the lower portions 30, 230, 330, 430, and 530.
- FIG. As a result, even when the input devices 100 to 500 are placed in such a posture that the lower portions 30, 230, 330, 430, 530 face the camera 2a, the positions and postures of the input devices 100 to 500 can be well recognized.
- the width W21 of the upper portion 20/520 in the horizontal direction is larger than the width W22 of the upper portion 20/520 in the front-rear direction.
- the width W32 of the lower portion 30/530 in the front-rear direction is greater than the width W31 of the lower portion 30/530 in the left-right direction.
- the direction in which the tracked points H are arranged in the upper part 20/520 can be made different from the direction in which the tracked points H are arranged in the lower part 30/530.
- the positions and orientations of the input devices 100 and 500 can be calculated using the tracked points H, and the recognition accuracy of the orientations and positions of the input devices can be improved.
- the input devices 100/200 some of the plurality of tracked points H are provided on the grips 11/211. According to this input device, even when the input devices 100 and 200 are arranged so that the outer surfaces of the grips 11 and 211 face the camera 2a, the tracked points H on the grips 11 and 211 are used to control the input devices 100 and 200. can recognize the position and posture of the object, so the recognition accuracy can be improved.
- the front surface 321a of the upper portion 320 includes an operating member region R1 in which the operating members 13 to 15 are arranged and a tracked region in which a plurality of tracking points H are arranged along the edge of the operating member region R1. R2.
- the front surface 321a has a step 321g between the operating member region R1 and the tracked region R2. According to this input device 300, fingers operating the operation members 13 to 15 arranged on the front surface 321a of the input device 300 can be prevented from overlapping the tracked point H.
- an LED 551 which is a light source, is mounted on a flexible substrate 550, and this flexible substrate 550 extends from an upper portion 520 to a lower portion 530 through an extension portion 540. Thereby, the number of parts of the input device 500 can be reduced.
- the flexible substrate 550 extends from the upper portion 520 to the extension portion 540 and may further have a separate flexible substrate disposed on the lower portion 530 . In another example, the flexible substrate 550 may extend from the lower portion 530 to the extension portion 540 and additionally have a separate flexible substrate positioned on the upper portion 520 .
- the input device 600/700 extends along a plane including an upper portion 620/720 having a front surface 621a/721a on which the operating members 13/16/17 are arranged, and a front surface 621a/721a. and extensions 640 and 740 in which tracking points H are provided.
- the extending portions 640 and 740 it becomes easy to secure a region (surface area) for arranging the tracked point H.
- a sufficient number of tracked points H can be provided on the input devices 500 and 600 while ensuring the distance between two adjacent tracked points H.
- FIG. As a result, the recognition accuracy of the orientation and position of the input device can be improved.
- the members (housings) constituting the external appearance of the input devices 600/700 ) can be simplified.
- the characteristic structures described with reference to input devices 100-700 and 10A-70A may be applied to other input devices proposed in this disclosure.
- the step 321g of the input device 300 described with reference to FIG. 4A may be applied to other input devices 100, 200, 400-700 and 10A-70A while maintaining their features.
- the flexible substrate 550 of the input device 500 described with reference to FIG. 6A may be provided to other input devices 100-700 and 10A-70A while retaining the features thereof.
- the input devices 100-700 and 10A-70A may not have the operation members 13-17. Even in this case, the user may be able to reflect the movement in the moving image displayed on the HMD 2 by moving the input device while holding the grip.
- a camera for tracking the positions and orientations of the input devices 100 to 700 and 10A to 70A does not necessarily have to be provided in the HMD 2. As described above, for example, when moving images generated based on the positions and orientations of the input devices 100 to 700 and 10A to 70A are displayed on an external display device (for example, a television or personal computer monitor) , a camera may be attached to this display.
- an external display device for example, a television or personal computer monitor
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Input By Displaying (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023549225A JP7657949B2 (ja) | 2021-09-22 | 2021-09-22 | 入力デバイス |
| PCT/JP2021/034846 WO2023047495A1 (ja) | 2021-09-22 | 2021-09-22 | 入力デバイス |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/034846 WO2023047495A1 (ja) | 2021-09-22 | 2021-09-22 | 入力デバイス |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023047495A1 true WO2023047495A1 (ja) | 2023-03-30 |
Family
ID=85720250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/034846 Ceased WO2023047495A1 (ja) | 2021-09-22 | 2021-09-22 | 入力デバイス |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7657949B2 (https=) |
| WO (1) | WO2023047495A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007296248A (ja) * | 2006-05-02 | 2007-11-15 | Sony Computer Entertainment Inc | ゲーム装置 |
| US20170337737A1 (en) * | 2016-05-17 | 2017-11-23 | Occipital, Inc. | Self-contained mixed reality head mounted display |
| US20200201460A1 (en) * | 2018-12-21 | 2020-06-25 | Finch Technologies Ltd. | Universal Handheld Controller of a Computer System |
| US20200346105A1 (en) * | 2015-12-21 | 2020-11-05 | Sony Interactive Entertainment Inc. | Controller Having Lights Disposed Along a Loop of the Controller |
| JP2021524916A (ja) * | 2018-05-18 | 2021-09-16 | バルブ コーポレーション | ポリイミド基板を備えた力検知抵抗器(fsr)、システム、およびその方法 |
-
2021
- 2021-09-22 WO PCT/JP2021/034846 patent/WO2023047495A1/ja not_active Ceased
- 2021-09-22 JP JP2023549225A patent/JP7657949B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007296248A (ja) * | 2006-05-02 | 2007-11-15 | Sony Computer Entertainment Inc | ゲーム装置 |
| US20200346105A1 (en) * | 2015-12-21 | 2020-11-05 | Sony Interactive Entertainment Inc. | Controller Having Lights Disposed Along a Loop of the Controller |
| US20170337737A1 (en) * | 2016-05-17 | 2017-11-23 | Occipital, Inc. | Self-contained mixed reality head mounted display |
| JP2021524916A (ja) * | 2018-05-18 | 2021-09-16 | バルブ コーポレーション | ポリイミド基板を備えた力検知抵抗器(fsr)、システム、およびその方法 |
| US20200201460A1 (en) * | 2018-12-21 | 2020-06-25 | Finch Technologies Ltd. | Universal Handheld Controller of a Computer System |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7657949B2 (ja) | 2025-04-07 |
| JPWO2023047495A1 (https=) | 2023-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7271245B2 (ja) | 入力デバイス | |
| KR102705948B1 (ko) | 입력 장치 | |
| US10661183B2 (en) | Game operating device | |
| JP6931509B2 (ja) | 入力装置および画像表示システム | |
| US9389751B2 (en) | Storage medium storing subject selecting program and subject selecting apparatus | |
| JP7311550B2 (ja) | 入力デバイス | |
| JP7657949B2 (ja) | 入力デバイス | |
| JP7595779B2 (ja) | 入力デバイス | |
| JP7323566B2 (ja) | 入力デバイス | |
| US12242099B2 (en) | Input device | |
| JP3126898B2 (ja) | 頭部搭載型ディスプレイ装置 | |
| KR102139354B1 (ko) | 모듈형 운동 보조 장치 및 이를 이용한 체험형 콘텐츠 제공 시스템 | |
| KR20250127256A (ko) | 휴대용 컨트롤러 및 휴대용 컨트롤러와 xr디바이스 연결방법 | |
| KR20100073205A (ko) | 광 조이스틱 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21958371 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023549225 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21958371 Country of ref document: EP Kind code of ref document: A1 |