WO2023042612A1 - データ同化装置、データ同化方法、データ同化プログラム、及びデータ同化システム - Google Patents
データ同化装置、データ同化方法、データ同化プログラム、及びデータ同化システム Download PDFInfo
- Publication number
- WO2023042612A1 WO2023042612A1 PCT/JP2022/031628 JP2022031628W WO2023042612A1 WO 2023042612 A1 WO2023042612 A1 WO 2023042612A1 JP 2022031628 W JP2022031628 W JP 2022031628W WO 2023042612 A1 WO2023042612 A1 WO 2023042612A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- value
- data assimilation
- initial state
- unknown parameter
- evaluation function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/11—Complex mathematical operations for solving equations, e.g. nonlinear equations, general mathematical optimization problems
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/18—Complex mathematical operations for evaluating statistical data, e.g. average values, frequency distributions, probability functions, regression analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G06F30/23—Design optimisation, verification or simulation using finite element methods [FEM] or finite difference methods [FDM]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G06F30/25—Design optimisation, verification or simulation using particle-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N7/00—Computing arrangements based on specific mathematical models
- G06N7/01—Probabilistic graphical models, e.g. probabilistic networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/067—Enterprise or organisation modelling
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/10—Office automation; Time management
- G06Q10/101—Collaborative creation, e.g. joint development of products or services
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/08—Probabilistic or stochastic CAD
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/10—Numerical modelling
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2113/00—Details relating to the application field
- G06F2113/10—Additive manufacturing, e.g. three-dimensional [3D] printing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2113/00—Details relating to the application field
- G06F2113/24—Sheet material
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2119/00—Details relating to the type or aim of the analysis or the optimisation
- G06F2119/14—Force analysis or force optimisation, e.g. static or dynamic forces
Definitions
- the disclosed technology relates to a data assimilation device, a data assimilation method, a data assimilation program, and a data assimilation system.
- the disclosed technique has been made in view of the above points, and provides a data assimilation device, method, program, and data assimilation that can perform data assimilation using an algorithm that can be easily implemented while suppressing calculation costs.
- the purpose is to provide a system.
- a first aspect of the present disclosure is a data assimilation device comprising: an acquisition unit that acquires measured values obtained by measuring changes in a predetermined environment of a data assimilation target; A calculation unit that numerically calculates changes in the predetermined environment of the data assimilation target using temporary values, and an error between the measured value and a value corresponding to the measured value obtained from the result of the numerical calculation.
- a second aspect of the present disclosure is a data assimilation method, wherein an acquisition unit acquires measured values obtained by measuring changes in a predetermined environment of a data assimilation target, and a calculation unit performs a provisional initial Numerical calculation of changes in the predetermined environment of the data assimilation target is performed using temporary values of the state and the unknown parameter, and the updating unit updates the actual measured value and the actual measured value obtained from the result of the numerical calculation.
- a third aspect of the present disclosure acquires measured values obtained by measuring changes in a predetermined environment of a data assimilation target, and uses a provisional initial state and a provisional value of an unknown parameter for the data assimilation target to perform the data assimilation.
- a fourth aspect of the present disclosure is an input unit for inputting an actual measured value obtained by measuring a change in a predetermined environment of a data assimilation target, a provisional initial state and a provisional value of an unknown parameter regarding the data assimilation target, and the data
- a calculation unit that numerically calculates changes in the predetermined environment of the data assimilation target using a provisional initial state and a provisional value of an unknown parameter related to the assimilation target, and obtained from the actual measurement and the result of the numerical calculation.
- an evaluation function value representing an error between a value corresponding to the actual measurement value obtained, obtaining an acquisition function from a plurality of combinations of the initial state, the unknown parameter value, and the evaluation function value; an update unit that updates the initial state that minimizes the value of the evaluation function and the value of the unknown parameter based on the value of the acquisition function; and a presentation unit, wherein the calculation unit is updated by the update unit.
- the numerical calculation is performed again using the obtained initial state and the value of the unknown parameter, and the numerical calculation by the calculation unit and the update by the update unit are repeated to obtain the initial state and the value of the data assimilation target.
- a value of the unknown parameter is estimated, and the presentation unit presents the estimated initial state and the value of the unknown parameter.
- FIG. 1 is a schematic block diagram of an example of a computer functioning as a data assimilation device of this embodiment;
- FIG. 1 is a block diagram showing the configuration of a data assimilation device of this embodiment;
- FIG. 4 is a flow chart showing a data assimilation processing routine in the data assimilation device of the present embodiment;
- FIG. 4 is a diagram showing the results of powder sintering simulation in Example 1.
- FIG. 4 is a diagram showing estimation results of the inside of a sintered body in data assimilation processing in Example 1.
- FIG. It is a figure which shows the minimization calculation process of an evaluation function compared with the conventional method.
- FIG. 10 is a diagram showing an example of experimental data in Example 2;
- FIG. 10 is a diagram showing an example of experimental data in Example 2;
- FIG. 10 is a diagram showing an example of simulation results in Example 2;
- FIG. 10 is a cross-sectional view showing the shape and dimensions of a mold and a blank used in an experiment in Example 2;
- FIG. 10 is a diagram showing the results of in-situ observation of changes in three-dimensional shape of fine silver particles in Example 3;
- 10 is a graph showing changes in evaluation function values in Example 3.
- FIG. 10 is a diagram showing an example of an estimation result of temporal change in the three-dimensional shape of fine silver particles during sintering obtained by performing a sintering simulation in Example 3; It is a conceptual diagram of the process of calculating a posterior distribution from a prior distribution based on Bayes' theorem. It is a block diagram which shows the structure of the data assimilation system in the modification of this embodiment.
- the data assimilation algorithms classified into this use "ensemble approximation of probability density function" that treats the probability density function as a collection (histogram) of many numerical simulation results.
- Typical algorithms include Ensemble Kalman Filter (EnKF), Particle Filter (PF), and Marginal Particle Filter (MPF).
- the other is an algorithm based on the minimization calculation of the evaluation function that represents the error between the actual measurement value and the numerical simulation result.
- Data assimilation algorithms classified into this are called adjoint methods or variational methods.
- an evaluation function J that represents the error between experimental data and numerical simulation results, and solving the minimization problem of J, the unknown parameter and estimate the initial state.
- This algorithm does not require the ensemble approximation of the probability density function, unlike the algorithm using the ensemble approximation of the probability density function described above.
- Typical algorithms include a three-dimensional variational method and a four-dimensional variational method (4DVar).
- This embodiment uses a new data assimilation algorithm that combines Bayesian Optimization (BO), which is an optimization theory.
- BO Bayesian Optimization
- this embodiment by applying Bayesian optimization to the minimization calculation of the evaluation function J, the amount of calculation can be greatly reduced.
- Bayesian optimization it is possible to eliminate the need to calculate the gradient of the evaluation function J, which is required in the conventional adjoint method. Promote the application of data assimilation to simulation.
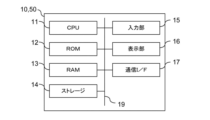
- FIG. 1 is a block diagram showing the hardware configuration of the data assimilation device 10 of this embodiment.
- the data assimilation device 10 includes a CPU (Central Processing Unit) 11, a ROM (Read Only Memory) 12, a RAM (Random Access Memory) 13, a storage 14, an input section 15, a display section 16, and a communication interface. (I/F) 17.
- CPU Central Processing Unit
- ROM Read Only Memory
- RAM Random Access Memory
- storage 14 an input section 15, a display section 16, and a communication interface. (I/F) 17.
- I/F communication interface.
- the CPU 11 is a central processing unit that executes various programs and controls each part. That is, the CPU 11 reads a program from the ROM 12 or the storage 14 and executes the program using the RAM 13 as a work area. The CPU 11 performs control of each configuration and various arithmetic processing according to programs stored in the ROM 12 or the storage 14 .
- the ROM 12 or storage 14 stores a data assimilation program for executing data assimilation processing.
- the data assimilation program may be one program, or may be a program group composed of a plurality of programs or modules.
- the ROM 12 stores various programs and various data.
- the RAM 13 temporarily stores programs or data as a work area.
- the storage 14 is composed of a HDD (Hard Disk Drive) or an SSD (Solid State Drive), and stores various programs including an operating system and various data.
- the input unit 15 includes a pointing device such as a mouse and a keyboard, and is used for various inputs.
- the input unit 15 accepts actual measurements of changes in a predetermined environment for data assimilation.
- the display unit 16 is, for example, a liquid crystal display, and displays various information.
- the display unit 16 may employ a touch panel system and function as the input unit 15 .
- the communication interface 17 is an interface for communicating with other devices, and uses standards such as Ethernet (registered trademark), FDDI, and Wi-Fi (registered trademark), for example.
- FIG. 2 is a block diagram showing an example of the functional configuration of the data assimilation device 10. As shown in FIG.
- the data assimilation device 10 functionally includes an acquisition unit 101, a calculation unit 102, an update unit 103, and an iteration determination unit 104, as shown in FIG.
- the acquisition unit 101 acquires measured values obtained by measuring changes in a predetermined environment of the input data assimilation target. For example, experimental data consisting of measured values obtained by measuring changes under experimental conditions representing a predetermined environment of the data assimilation target is obtained.
- the calculation unit 102 numerically calculates changes in the data assimilation target in a predetermined environment using a provisional initial state and unknown parameter values relating to the data assimilation target. Further, the calculation unit 102 performs numerical calculation again using the initial state and the value of the unknown parameter updated by the update unit 103 .
- simulation software that numerically calculates changes in a given environment for data assimilation (executable files compiled from source code)
- the initial state, unknown parameter values, and the same given environment as the experimental conditions We give the data to be represented, numerically calculate the changes in the object of data assimilation, and obtain the predicted values corresponding to the experimental data.
- the update unit 103 calculates the value of the evaluation function that represents the error between the actual measurement value acquired by the acquisition unit 101 and the predicted value corresponding to the actual measurement value obtained from the result of the numerical calculation by the calculation unit 102 .
- the updating unit 103 obtains a plurality of combinations of the initial state, the value of the unknown parameter, and the value of the evaluation function.
- the update unit 103 calculates the initial state and the unknown parameter value that minimizes the value of the evaluation function by Bayesian optimization based on Gaussian process regression from a plurality of combinations of the initial state, the unknown parameter value, and the evaluation function value. and update the values of the initial state and unknown parameters to the derived values.
- the updating unit 103 calculates the relationship between the initial state, the unknown parameter value, and the evaluation function value based on a plurality of combinations of the initial state, the unknown parameter value, and the evaluation function value, using Gaussian process regression. Regression analysis by The updating unit 103 obtains the average value and variance of evaluation function values corresponding to an arbitrary initial state and unknown parameter values obtained by regression analysis, and calculates the acquisition function value from the average value and variance of the evaluation function values. demand. The updating unit 103 updates the initial state and unknown parameter values estimated to bring about the minimum value of the evaluation function from the value of the acquisition function.
- time-series experimental data symbolically, experimental data at a certain time t is represented by a vector yt
- a vector xt defines a predicted value at a certain time t obtained by numerical calculation.
- an evaluation function J representing an error between experimental data and numerical simulation results is defined as follows based on maximum likelihood estimation or Maximum a Posterior Estimation (MAP) estimation.
- x0 is a vector consisting of unknown parameters and initial states, which are input data for numerical simulation.
- x 0 b represents the initial estimate of x 0 when the numerical simulation results reproduce the experimental data.
- B is called the background error covariance matrix and R t is called the observation error covariance matrix, which represent the error magnitudes of x 0 b and y t respectively.
- M(x 0 ) represents the simulation model.
- H t is an operator used to extract a quantity comparable to the experimental data y t from the numerical simulation result (that is, x t ) and is called an observation operator.
- the x 0 that minimizes the evaluation function J in Equation (1) should be a vector consisting of the optimum parameters and the initial state to be obtained by data assimilation, and is represented as x 0 a .
- H t and M t are respectively represented by the following equations.
- equation (4) must be computed in order to compute equation (2).
- Mt the degree of nonlinear partial differential equations
- the formula (4) is obtained, the calculation cost of calculating the formula (2) and minimizing the evaluation function J of the formula (1) is high.
- the repetition determination unit 104 determines whether or not a predetermined repetition end condition is satisfied.
- the iteration determination unit 104 repeats the numerical calculation by the calculation unit 102 and the update by the update unit 103 until the iteration end condition is satisfied.
- the finally obtained optimal unknown parameters and initial state values are obtained as a result of data identification.
- the iteration termination condition it is possible to use the fact that the number of iterations reaches the upper limit value, that the value of the evaluation function converges, or that the user inputs an iteration termination instruction after viewing the result of data identification. can be done.
- FIG. 3 is a flow chart showing the flow of data assimilation processing by the data assimilation device 10.
- the data assimilation process is performed by the CPU 11 reading the data assimilation program from the ROM 12 or the storage 14, developing it in the RAM 13, and executing it.
- the data assimilation apparatus 10 also receives experimental data, which is an object to be data assimilated and is composed of measured values obtained by measuring changes under experimental conditions representing a predetermined environment. It is also assumed that the initial states and initial values of unknown parameters used in numerical calculations and the range of possible values of unknown parameters are defined.
- step S100 the CPU 11, as the acquisition unit 101, acquires experimental data consisting of measured values obtained by measuring changes under experimental conditions representing a predetermined environment of the data assimilation target.
- the CPU 11 as the calculation unit 102, sets initial values for the initial state and unknown parameters. Specifically, x 0 b is set.
- step S104 the CPU 11, as the calculation unit 102, outputs the initial state and unknown parameter values to the simulation software (which may be an executable file obtained by compiling the source code) for numerically calculating changes in a predetermined environment to be data assimilated. , and data representing the same predetermined environment as the experimental conditions, numerically calculate the change in the data assimilation object, and obtain the value corresponding to the experimental data.
- the simulation software which may be an executable file obtained by compiling the source code
- the simulation software which may be an executable file obtained by compiling the source code
- step S106 the CPU 11, as the update unit 103, evaluates the value of the evaluation function representing the error between the measured value obtained in step S100 and the value corresponding to the measured value obtained from the result of the numerical calculation in step S104 or S114. to calculate
- the evaluation function J is calculated according to the above equation (1).
- n is an arbitrary integer of 1 or more.
- prior information D(1:n+1) is created by newly adding a combination of x 0 (n+1) and J(x 0 (n+1)). be.
- step S108 the CPU 11, as the update unit 103, uses the prior information D(1:m) (m ⁇ n), and from a plurality of combinations of the initial state and the value of the unknown parameter and the value of the evaluation function J, The initial state and unknown parameters are calculated so as to minimize the value of the evaluation function J by Bayesian optimization.
- the relationship between the initial state, the unknown parameter value, and the evaluation function value is Gaussian based on multiple combinations of the initial state, the unknown parameter value, and the evaluation function value.
- Perform regression analysis by process regression find the mean and variance of the evaluation function values corresponding to the arbitrary initial state and unknown parameter values obtained by regression analysis, and obtain the acquisition function from the mean and variance of the evaluation function values.
- a value a(x 0 ) is obtained, and an acquisition function a(x 0 ) for minimizing the evaluation function J of Equation (1) is calculated.
- the type of acquisition function is not limited, but for example, an Expected Improvement (EI) function can be used.
- EI Expected Improvement
- step S110 the CPU 11, as the repetition determination unit 104, determines whether or not a predetermined repetition end condition is satisfied. If the iteration end condition is not satisfied, the process proceeds to step S112. On the other hand, if the iteration end condition is satisfied, the process proceeds to step S116.
- step S112 the CPU 11, as the updating unit 103, updates the initial state and unknown parameter values given to the simulation software (an executable file obtained by compiling the source code) to the initial state and unknown parameters calculated in step S108. Change to the value of the parameter.
- step S114 the CPU 11, as the calculation unit 102, outputs the initial state and unknown parameter values changed in step S112 to the simulation software (which may be an executable file obtained by compiling the source code), and the same predetermined conditions as the experimental conditions.
- the simulation software which may be an executable file obtained by compiling the source code
- step S116 the CPU 11 displays the optimal initial state and unknown parameter values that minimize the evaluation function on the display unit 16 as identification results, saves them in the ROM 12 or storage 14, and ends the data assimilation process.
- Sintering is one of the material manufacturing technologies that heats powder to create a dense solid, and is a fundamental technology in the powder metallurgy and ceramics industries. In recent years, in particular, this technology has been regarded as important from the viewpoint of research and development of 3D printers using the laser sintering method. Therefore, for the purpose of controlling various characteristics of materials manufactured by sintering, research on numerical simulation of sintering (hereinafter abbreviated as sintering simulation) that predicts crystal changes in solids that occur during sintering. is active. However, it is necessary to accumulate a large amount of experimental data to experimentally accurately identify the physical property values used in the sintering simulation and the parameters included in the mathematical model calculated in the sintering simulation.
- Example 1 the above embodiment is applied to a sintering simulation using the phase field method, and numerical experiments demonstrate that it is possible to estimate crystal changes and physical property values/parameters during sintering.
- the target material in this first embodiment is silver particles (powder).
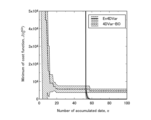
- En4DVar which is a conventional data assimilation algorithm, it is shown that the computational complexity can be reduced to 1/2 or less.
- Table 1 shows the physical property values and parameters (true values in numerical experiments) used in the sintering simulation conducted to obtain pseudo-experiment data.
- FIG. 4 shows the results of a sintering simulation performed using the physical property values and parameters shown in Table 1.
- FIG. 4(a) shows changes in the surface shape of the sintered body, and shows that silver fine particles fuse (aggregate) due to sintering.
- FIG. 4(b) shows a z-axis central cross-section of the sintered body, showing which crystals and grain boundaries exist at which positions. In numerical experiments, only the results shown in FIG. 4(a) are used as pseudo observation data.
- Table 2 shows initial estimates of physical properties and parameters in numerical experiments. That is, it is the initial value of the physical property value and the parameter estimated by this embodiment or En4DVar.
- the initial value was set to 1/2 of the true value shown in Table 1.
- physical property values/parameters can be accurately estimated by using the above embodiment.
- Fig. 5 shows estimation results of the sintered body using the above embodiment. Compared with FIG. 4, there is almost no difference, and the inside of the sintered body can be estimated with high accuracy.
- the upper part of FIG. 5 represents the error between the pseudo-experimental data shown in FIG. 4(a) and the estimation result in the above embodiment, and the evaluation function is minimized from FIG. As a result, the error is reduced and the state estimation accuracy is improved.
- the lower part shows the result of estimation of the inside of the sintered body. Compared with FIG. 4B, there is almost no difference, and the inside of the sintered body can be estimated with high accuracy.
- FIG. 6 shows the process of minimizing the evaluation function calculated by the above embodiment and En4DVar.
- the horizontal axis represents the number of sintering simulations performed to minimize the evaluation function.
- Press molding of metal sheets is an important production process in the manufacturing industry, with the automobile industry being a typical example.
- Numerical simulations of press forming processes using the finite element method (hereinafter abbreviated as forming simulations) are being performed with the aim of improving the yield and development efficiency during press forming processes for metal sheets, and improving the accuracy of their predictions. is required.
- forming simulations Numerical simulations of press forming processes using the finite element method
- Procedure B Time-series changes in displacement and strain on the surface of the test piece obtained as a result of the hole-expanding simulation performed in Procedure A are stored as pseudo-experiment data.
- the experimental data of time-series changes in the displacement and strain of the test piece surface measured by the digital image correlation method will be used. .
- Procedure D Using the parameters of the values shown in Table 5, while performing a hole-expanding simulation, importing the pseudo-experiment data saved in Procedure B by the data assimilation processing method of the above embodiment, that is, pseudo-experiment In the process of correcting the results of the hole expanding simulation based on the data, the estimated values of the parameters are corrected, and finally the parameters are identified.
- Table 6 shows the finally identified parameter values.
- Example 2 is as follows.
- FIG. 9 is a cross-sectional view showing the shape and dimensions of the mold and blank used in the experiment.
- Teflon (registered trademark) sheet coated with vaseline (lubricant) is sandwiched between the blank and the punch die.
- the punch die is raised in the z direction. During this time, the load applied to the punch die is measured with a load cell. Also, sequential images of the blank surface are taken with two digital cameras.
- the punch mold is lowered and the molds are removed one by one to end the test.
- the image taken by the digital camera is processed by the digital image correlation method, and the deformation (displacement and strain) that occurred in the blank is calculated by computer.
- the calculated result becomes the experimental data of the data assimilation process of the above embodiment.
- Example 3 Next, an example will be described in which the data assimilation processing of the above embodiment is applied to a powder sintering process and verified using actual experimental data.
- Example 3 The purpose of Example 3 is to use a scanning transmission electron microscope (STEM) to observe the sintering process of fine silver particles in situ, and to assimilate the experimental data on the three-dimensional shape change of fine silver particles obtained there. As observation data, the physical property values/parameters (the four values shown in Table 1 above and the stiffness constant k) used in the sintering simulation are estimated.
- STEM scanning transmission electron microscope
- Table 7 shows the search range of the physical property values and parameters to be estimated, the initial estimated values, and the standard deviation of the initial estimated values.
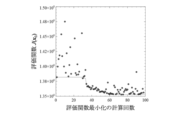
- FIG. 11 shows changes in the evaluation function J(x0) when estimating physical property values and parameters by a data assimilation method using Bayesian optimization based on TPE.
- the minimum value of the evaluation function was obtained at the 73rd iteration of the evaluation function minimization calculation.
- the values of the physical properties and parameters obtained at this time are the optimum estimated values, which are shown in Table 8.
- FIG. 12 shows the results of estimating the temporal change in the three-dimensional shape of the fine silver particles during sintering, which was obtained by performing a sintering simulation using the optimal estimated physical property values and parameters shown in Table 8 above. Compared with the results of in-situ observation shown in FIG. 10, it was found that the three-dimensional shape change of the fine silver particles can be estimated with high accuracy.
- the data assimilation apparatus of the present embodiment numerically calculates changes in a given environment of a data assimilation target using a provisional initial state of the data assimilation target and provisional values of unknown parameters. And by Bayesian optimization, it repeats updating the initial state that minimizes the value of the evaluation function and the value of the unknown parameter. This estimates the initial state and unknown parameter values for the data assimilation target. Therefore, data assimilation can be performed with an algorithm that reduces computational cost and can be easily implemented.
- the present embodiment overcomes the above problem, and the data assimilation algorithm of the present embodiment can be easily implemented if there is a numerical simulation source code or simulation software. Therefore, in numerical simulations in various fields, numerical simulations utilizing experimental data (data-driven simulations) are becoming widespread.
- the conventional method of using Bayesian optimization is the search for the minimum value of a function (black-box function) that cannot be formulated mathematically.
- the minimization calculation of the evaluation function J which is mathematically clearly formulated, is performed.
- the minimization calculation of the evaluation function J can be calculated by conventional techniques (steepest descent method, Broyden-Fletcher-Goldfarb-Shanno (BFGS) method, etc.), but the gradient of the evaluation function J must be calculated.
- BFGS Broyden-Fletcher-Goldfarb-Shanno
- the data assimilation apparatus of the present embodiment performs regression analysis on the relationship between the initial state, unknown parameter values, and evaluation function values using Gaussian process regression.
- the data assimilation device obtains the average value and variance of the predicted values of the evaluation function corresponding to an arbitrary initial state and unknown parameter values obtained by regression analysis, and obtains the acquisition function from the average value and variance of the predicted values of the evaluation function. find the value.
- the data assimilation device obtains an initial state and unknown parameter values estimated to bring about the minimum value of the evaluation function from the values of the acquisition function. Repeat these things. As a result, the value of the evaluation function can be minimized without calculating the gradient of the evaluation function.
- the data assimilation apparatus is implemented by one or more servers, and an information processing terminal connected via a network allows the user to input measured values obtained by measuring changes in a predetermined environment for data assimilation and data assimilation.
- a provisional initial state of the object and provisional values of unknown parameters may be input.
- the data assimilation system 100 includes a data assimilation device 10 serving as a server and an information processing terminal 50.
- the data assimilation device 10 and the information processing terminal 50 are connected to the Internet or the like. are connected via a network N of
- the information processing terminal 50 has a CPU 11, a ROM 12, a RAM 13, a storage 14, an input section 15, a display section 16 and a communication interface 17, as shown in FIG.
- the input unit 15 of the information processing terminal 50 accepts the measured values of the data assimilation target measured for changes in a predetermined environment, and the provisional initial state and unknown parameter values of the data assimilation target input by the user.
- the information processing terminal 50 transmits to the data assimilation apparatus 10 actual measurement values obtained by measuring changes in a predetermined environment of the data assimilation target, a provisional initial state of the data assimilation target, and provisional values of unknown parameters.
- the acquisition unit 101 of the data assimilation apparatus 10 acquires the received measured values obtained by measuring changes in a predetermined environment of the data assimilation target, and a provisional initial state and unknown parameter values relating to the data assimilation target.
- the data assimilation device 10 transmits the estimation result to the information processing terminal 50 .
- the display unit 16 of the information processing terminal 50 presents the estimated initial state and unknown parameter values to the user.
- the data assimilation target is a substance or material
- the unknown parameter is the physical property value of the substance or material, but it is not limited to this.
- INDUSTRIAL APPLICABILITY The present invention relates to data assimilation, which is a numerical calculation technique that connects experiments and numerical simulations, and therefore can be used in a wide range of fields where numerical simulations are used.
- the data assimilation target may be heat or fluid
- the heat or fluid related parameters may be unknown parameters using a heat or fluid simulation.
- the data assimilation target may be electromagnetic waves
- the electromagnetic wave-related parameters may be unknown parameters using a simulation related to electromagnetic waves.
- the data assimilation target may be the weather
- the time-series data of temperature and atmospheric pressure measured by meteorological satellites may be the measured values
- the parameters of the weather simulation model may be estimated using a weather simulation.
- the target of data assimilation is the infection phenomenon of infectious diseases
- the daily data on the number of infected people is the actual measurement value
- the infection rate parameters necessary for the simulation are estimated using a simulation of the fluctuation of the number of infected patients. good too.
- the data assimilation target may be the stock price
- the daily stock price data may be the measured value
- the stock price fluctuation simulation parameters may be estimated using a stock price fluctuation simulation related to financial engineering. For example, daily fluctuations in stock prices can be predicted by numerical simulation using the Black-Scholes model or the like.
- Bayesian optimization based on Gaussian process regression
- the method is not limited to this.
- Bayesian optimization based on the Tree-structured Parzan Estimator (TPE) may be used.
- TPE Tree-structured Parzan Estimator
- the updating unit 103 calculates the value of the evaluation function representing the error between the measured value acquired by the acquiring unit 101 and the value corresponding to the measured value obtained from the result of numerical calculation by the calculating unit 102 .
- the updating unit 103 divides a plurality of combinations of the initial state, the unknown parameter value, and the evaluation function value into a higher group and a lower group consisting of combinations of the initial state, the unknown parameter value, and the evaluation function value. Classify.
- the updating unit 103 estimates the probability density function for the upper group and the probability density function for the lower group, and calculates the value of the acquisition function from the ratio of the probability density function for the upper group and the probability density function for the lower group. demand.
- the data assimilation device updates the initial state and unknown parameter values that are estimated to yield the minimum value of the evaluation function from the values of the acquisition function.
- Bayesian optimization based on TPE an evaluation function is calculated in the same way as Bayesian optimization based on Gaussian process regression.
- the data obtained so far (the combination of the input initial state and parameters and the output evaluation function) is divided into two groups, the upper group and the lower group, based on the magnitude of the evaluation function and the set threshold. classified into Then, the kernel density estimation is performed on the data of each group of the upper group and the lower group, and two probability density functions are calculated. Then, the magnitude relation of the acquisition function is calculated from the ratio of these two probability density functions.
- the subsequent operations are similar to Bayesian optimization based on Gaussian process regression. find the value.
- the various processes executed by the CPU by reading the software (program) in each of the above embodiments may be executed by various processors other than the CPU.
- the processor is a PLD (Programmable Logic Device) whose circuit configuration can be changed after manufacturing, such as an FPGA (Field-Programmable Gate Array), and an ASIC (Application Specific Integrated Circuit) to execute specific processing.
- a dedicated electric circuit or the like which is a processor having a specially designed circuit configuration, is exemplified.
- the data assimilation processing may be performed on one of these various processors, or on a combination of two or more processors of the same or different kind (e.g., multiple FPGAs, and CPU and FPGA combinations). etc.).
- the hardware structure of these various processors is an electric circuit in which circuit elements such as semiconductor elements are combined.
- the data assimilation program has been pre-stored (installed) in the storage 14, but the present invention is not limited to this.
- Programs are stored in non-transitory storage media such as CD-ROM (Compact Disk Read Only Memory), DVD-ROM (Digital Versatile Disk Read Only Memory), and USB (Universal Serial Bus) memory.
- CD-ROM Compact Disk Read Only Memory
- DVD-ROM Digital Versatile Disk Read Only Memory
- USB Universal Serial Bus
- a non-transitory storage medium storing a program executable by a computer to perform a data assimilation process
- the data assimilation process includes: Acquiring actual measurements of changes in a given environment for data assimilation, numerically calculating a change in the predetermined environment of the data assimilation target using a tentative initial state of the data assimilation target and tentative values of unknown parameters; calculating an evaluation function value representing an error between the measured value and a value corresponding to the measured value obtained from the result of the numerical calculation, and calculating the initial state, the unknown parameter value, and the evaluation function value; obtaining an acquisition function from a plurality of combinations of and updating the initial state and the unknown parameter values that minimize the value of the evaluation function based on the value of the acquisition function; in the numerical calculation, performing the numerical calculation again using the updated initial conditions and the values of the unknown parameters;
- a non-temporary storage medium that estimates an initial state and unknown parameter values for the data assimilation target by repeating the numerical calculation and the update.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- Data Mining & Analysis (AREA)
- Human Resources & Organizations (AREA)
- Mathematical Physics (AREA)
- General Engineering & Computer Science (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Mathematical Analysis (AREA)
- Computational Mathematics (AREA)
- Operations Research (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Economics (AREA)
- Algebra (AREA)
- Marketing (AREA)
- Computer Hardware Design (AREA)
- General Business, Economics & Management (AREA)
- Tourism & Hospitality (AREA)
- Quality & Reliability (AREA)
- Geometry (AREA)
- Databases & Information Systems (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Probability & Statistics with Applications (AREA)
- Development Economics (AREA)
- Game Theory and Decision Science (AREA)
- Bioinformatics & Computational Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Evolutionary Biology (AREA)
- Educational Administration (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Medical Informatics (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023548377A JPWO2023042612A1 (https=) | 2021-09-15 | 2022-08-22 | |
| US18/691,841 US20240394329A1 (en) | 2021-09-15 | 2022-08-22 | Data assimilation device, data assimilation method, data assimilation program, and data assimilation system |
| EP22869759.5A EP4404213B1 (en) | 2021-09-15 | 2022-08-22 | Data assimilation device, data assimilation method, data assimilation program, and data assimilation system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-150483 | 2021-09-15 | ||
| JP2021150483 | 2021-09-15 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023042612A1 true WO2023042612A1 (ja) | 2023-03-23 |
Family
ID=85602772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/031628 Ceased WO2023042612A1 (ja) | 2021-09-15 | 2022-08-22 | データ同化装置、データ同化方法、データ同化プログラム、及びデータ同化システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240394329A1 (https=) |
| EP (1) | EP4404213B1 (https=) |
| JP (1) | JPWO2023042612A1 (https=) |
| WO (1) | WO2023042612A1 (https=) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117009427A (zh) * | 2023-09-28 | 2023-11-07 | 北京弘象科技有限公司 | 风云卫星观测的同化方法、装置、电子设备及存储介质 |
| WO2024252992A1 (ja) * | 2023-06-05 | 2024-12-12 | Jfeスチール株式会社 | 製造条件選定方法、材料の製造方法、製造条件選定装置及びプログラム |
| WO2025013478A1 (ja) * | 2023-07-10 | 2025-01-16 | パナソニックIpマネジメント株式会社 | 評価装置、評価方法、およびプログラム |
| CN120974439A (zh) * | 2025-10-21 | 2025-11-18 | 浙江工业大学 | 基于先验身份导向和物理不变性的台风多任务估计方法 |
| WO2025238867A1 (ja) * | 2024-05-17 | 2025-11-20 | Ntt株式会社 | システム同定装置、システム同定方法及びプログラム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119358428B (zh) * | 2024-12-27 | 2025-04-04 | 中国建筑科学研究院有限公司 | 一种基于数据同化的中温冷水机组功耗预测方法及系统 |
| CN120012414B (zh) * | 2025-01-21 | 2025-12-26 | 江淮前沿技术协同创新中心 | 一种基于数值模拟的氮化硅烧结工艺参数优化方法 |
| CN119989989B (zh) * | 2025-02-24 | 2025-11-14 | 哈尔滨工程大学 | 一种基于数据同化的堆芯热工水力数值求解方法及系统 |
| CN120821997B (zh) * | 2025-09-15 | 2025-11-18 | 无锡九方科技有限公司 | 一种资料同化方法、装置及设备 |
| CN121072343B (zh) * | 2025-11-05 | 2026-02-03 | 中国海洋大学 | 一种耦合风场与浪场的海洋灾害预报方法及系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008241433A (ja) * | 2007-03-27 | 2008-10-09 | Nec Corp | 観測データ同化方法 |
| JP2014026440A (ja) * | 2012-07-26 | 2014-02-06 | Fujitsu Ltd | シミュレーションプログラム、シミュレーション装置およびシミュレーション方法 |
| JP2014119351A (ja) * | 2012-12-17 | 2014-06-30 | Mitsubishi Heavy Ind Ltd | パラメータ推定装置、パラメータ推定方法、蓄電システム及びプログラム |
| JP2021150483A (ja) | 2020-03-19 | 2021-09-27 | 株式会社東芝 | 半導体装置 |
-
2022
- 2022-08-22 EP EP22869759.5A patent/EP4404213B1/en active Active
- 2022-08-22 JP JP2023548377A patent/JPWO2023042612A1/ja active Pending
- 2022-08-22 WO PCT/JP2022/031628 patent/WO2023042612A1/ja not_active Ceased
- 2022-08-22 US US18/691,841 patent/US20240394329A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008241433A (ja) * | 2007-03-27 | 2008-10-09 | Nec Corp | 観測データ同化方法 |
| JP2014026440A (ja) * | 2012-07-26 | 2014-02-06 | Fujitsu Ltd | シミュレーションプログラム、シミュレーション装置およびシミュレーション方法 |
| JP2014119351A (ja) * | 2012-12-17 | 2014-06-30 | Mitsubishi Heavy Ind Ltd | パラメータ推定装置、パラメータ推定方法、蓄電システム及びプログラム |
| JP2021150483A (ja) | 2020-03-19 | 2021-09-27 | 株式会社東芝 | 半導体装置 |
Non-Patent Citations (6)
| Title |
|---|
| F. BARLATJ. C. BREMJ. W. YOONK. CHUNGR. E. DICKD. J. LEGEF. POURBOGHRATS. H. CHOIE. CHU, INTERNATIONAL JOURNAL OF PLASTICITY, vol. 19, no. 9, 2003, pages 1297 - 1319 |
| JAPAN METEOROLOGICAL AGENCY: "Challenges and Prospects of Ensemble Forecasting for Probabilistic Weather Forecasting", vol. 62, 2016, NUMERICAL FORECASTING DEPARTMENT REPORT |
| K. SASAKIA. YAMANAKAH. NAGAOS. ITO: "Data assimilation for phase-field models based on the ensemble Kalman filter", COMPUTATIONAL MATERIALS SCIENCE, vol. 141, 2018, pages 141 - 152, XP085244405, DOI: 10.1016/j.commatsci.2017.09.025 |
| See also references of EP4404213A4 |
| TOMOYUKI HIGUCHIGENTA UENOSHINYA NAKANOKAZUYUKI NAKAMURARYOU YOSHIDA: "Introduction to Data Assimilation - Next Generation Simulation Technology", 2011, ASAKURA PUBLISHING CO., LTD |
| TOSHIYUKI AWAJIMASAFUMI KAMACHIMOTOMI IKEDAYOICHI ISHIKAWA: "Data Assimilation: Innovation in Merging Observations and Experimentation with Models", 2009, KYOTO UNIVERSITY PRESS |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024252992A1 (ja) * | 2023-06-05 | 2024-12-12 | Jfeスチール株式会社 | 製造条件選定方法、材料の製造方法、製造条件選定装置及びプログラム |
| JPWO2024252992A1 (https=) * | 2023-06-05 | 2024-12-12 | ||
| WO2025013478A1 (ja) * | 2023-07-10 | 2025-01-16 | パナソニックIpマネジメント株式会社 | 評価装置、評価方法、およびプログラム |
| CN117009427A (zh) * | 2023-09-28 | 2023-11-07 | 北京弘象科技有限公司 | 风云卫星观测的同化方法、装置、电子设备及存储介质 |
| CN117009427B (zh) * | 2023-09-28 | 2024-01-12 | 北京弘象科技有限公司 | 风云卫星观测的同化方法、装置、电子设备及存储介质 |
| WO2025238867A1 (ja) * | 2024-05-17 | 2025-11-20 | Ntt株式会社 | システム同定装置、システム同定方法及びプログラム |
| CN120974439A (zh) * | 2025-10-21 | 2025-11-18 | 浙江工业大学 | 基于先验身份导向和物理不变性的台风多任务估计方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4404213A1 (en) | 2024-07-24 |
| US20240394329A1 (en) | 2024-11-28 |
| EP4404213A4 (en) | 2024-12-25 |
| EP4404213B1 (en) | 2026-04-22 |
| JPWO2023042612A1 (https=) | 2023-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2023042612A1 (ja) | データ同化装置、データ同化方法、データ同化プログラム、及びデータ同化システム | |
| He et al. | Profile monitoring based quality control method for fused deposition modeling process | |
| Khanzadeh et al. | Quantifying geometric accuracy with unsupervised machine learning: Using self-organizing map on fused filament fabrication additive manufacturing parts | |
| JP7356823B2 (ja) | パラメータ推定装置、パラメータ推定方法及びプログラム | |
| CN108563906B (zh) | 一种基于深度学习的短纤维增强复合材料宏观性能预测法 | |
| Ruybalid et al. | Comparison of the identification performance of conventional FEM updating and integrated DIC | |
| US10101153B2 (en) | Method and device for detecting deviations of an object surface | |
| De et al. | Bi-fidelity modeling of uncertain and partially unknown systems using DeepONets | |
| CN105183928A (zh) | 铸铝构件中的残余应力和变形的快速分析 | |
| Cocke et al. | The AFRL additive manufacturing modeling challenge: predicting micromechanical fields in AM IN625 using an FFT-based method with direct input from a 3D microstructural image | |
| Zongo et al. | Geometric deviations of laser powder bed–fused AlSi10Mg components: numerical predictions versus experimental measurements | |
| Saha et al. | Microscale structure to property prediction for additively manufactured in625 through advanced material model parameter identification | |
| Ghumman et al. | Calibration of cellular automaton model for microstructure prediction in additive manufacturing using dissimilarity score | |
| CN120995600B (zh) | 一种用于厢体连接定位的结构误差容忍模型构建方法 | |
| Xiang et al. | Multi-source integrated fusion for surface measurement | |
| Khosrowpour et al. | Distributed load identification for hyperelastic plates using gradient-based and machine learning methods | |
| He et al. | A Voxel-FNO-based machining deformation prediction method for structural parts | |
| CN120493636B (zh) | 人工智能辅助的冲压件成形性快速分析预测方法及系统 | |
| Chand et al. | A comparative study of rigid three-dimensional image registration methods for powder bed fusion with laser beam of metals using a gold standard approach | |
| CN115631237A (zh) | 一种高精度应变模式频域数字图像位移场测量方法及系统 | |
| CN118940584B (zh) | 一种基于缺陷重构技术开关柜内部的检测方法及系统 | |
| CN120046564A (zh) | 一种基于变分有限元方法的电磁仿真方法及其系统 | |
| Firat et al. | Improving the accuracy of stamping analyses including springback deformations | |
| Lee et al. | Vision-based geometric finite element model updating for cable suspension bridges | |
| AlShabi et al. | FPGA-based unscented Kalman filter for target tracking |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22869759 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023548377 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022869759 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022869759 Country of ref document: EP Effective date: 20240415 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2022869759 Country of ref document: EP |