WO2023032637A1 - 情報処理方法、情報処理装置、及び情報処理システム - Google Patents
情報処理方法、情報処理装置、及び情報処理システム Download PDFInfo
- Publication number
- WO2023032637A1 WO2023032637A1 PCT/JP2022/030708 JP2022030708W WO2023032637A1 WO 2023032637 A1 WO2023032637 A1 WO 2023032637A1 JP 2022030708 W JP2022030708 W JP 2022030708W WO 2023032637 A1 WO2023032637 A1 WO 2023032637A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- learning
- learning model
- model
- feature amount
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
- G06N20/20—Ensemble learning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0265—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric the criterion being a learning criterion
- G05B13/027—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric the criterion being a learning criterion using neural networks only
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/049—Temporal neural networks, e.g. delay elements, oscillating neurons or pulsed inputs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
Definitions
- the present invention relates to an information processing method, an information processing device, and an information processing system.
- multiple edge devices are used, and various processes are executed in various types of chambers having multiple edge devices.
- processes using multiple edge devices are being executed in various production management systems such as electrical equipment, electronic equipment, automobiles, pharmaceuticals, chemical products, and food products.
- the present disclosure has been made in view of such circumstances, and provides an information processing method, an information processing apparatus, and an information processing method capable of efficiently creating and managing models applied to various edge devices provided in a system. and provide an information processing system.
- An information processing method includes a step of acquiring feature amounts of data processed by a plurality of first learning models; is input, a step of learning a second learning model that outputs information about the estimation result, and inputting the feature amount of the acquired data to the second learning model after learning, and obtaining from the second learning model and outputting an informed estimation result.
- FIG. 1 is a diagram showing a configuration example of a substrate processing system according to an embodiment
- FIG. It is a schematic diagram which shows the structure of the drive system of a substrate processing apparatus.
- FIG. 4 is a cross-sectional view showing a configuration example of a chamber; It is a block diagram explaining the structure of the control system of a substrate processing apparatus.
- 3 is a block diagram showing the internal configuration of an edge device included in the substrate processing apparatus;
- FIG. FIG. 4 is a schematic diagram showing a configuration example of an observation model provided in an edge device;
- FIG. 4 is a schematic diagram showing a configuration example of a control model provided in an edge device; It is a block diagram which shows the internal structure of the control device with which a substrate processing apparatus is provided.
- FIG. 1 is a conceptual diagram showing a configuration example of a database
- FIG. 3 is a block diagram showing the internal configuration of a device group server
- FIG. 1 is a conceptual diagram showing a configuration example of a database
- FIG. 11 is a flow chart showing a procedure for generating a first learning model by an edge device
- FIG. 4 is a flow chart showing a procedure of processing executed inside the substrate processing apparatus in an operation phase
- 4 is a flow chart showing a procedure of processing executed between a substrate processing apparatus and an apparatus group server in an operation phase
- FIG. 5 is a schematic diagram showing a display example of an evaluation result
- the substrate processing system includes four substrate processing apparatuses 100A to 100D, but the number of apparatuses is not limited to four.
- the substrate processing apparatuses 100A to 100D are also referred to as the substrate processing apparatus 100 (see FIG. 2) when the substrate processing apparatuses 100A to 100D need not be distinguished.
- the device group server 200 may be a single computer, or a computer system including a plurality of computers and peripheral devices. Further, the device group server 200 may be a virtual machine in which the entity is virtualized, or may be a cloud.
- FIG. 2 is a schematic diagram showing the configuration of the drive system of the substrate processing apparatus 100.
- the substrate processing apparatus 100 includes a transport unit HU for loading/unloading a substrate W, and a processing unit SU for performing substrate processing on the substrate W. As shown in FIG.
- the transport unit HU includes a cassette stage 10 and a transport stage 20.
- the cassette stage 10 has a cassette container 11 .
- the cassette container 11 accommodates, for example, a maximum of 25 substrates W in a stacked state.
- the transport stage 20 includes a substrate transport mechanism 21 for transporting the substrate W.
- the substrate transport mechanism 21 has two transport arms 21A and 21B that hold the substrate W substantially horizontally.
- the substrate transport mechanism 21 takes out the substrates W one by one from the cassette container 11 using transport arms 21A and 21B.
- the substrate transport mechanism 21 transports the substrate W taken out of the cassette container 11 to either one of the load lock chambers 25A and 25B.
- the load lock chambers 25A, 25B connect the transport unit HU to the processing unit SU.
- the processing unit SU includes a transfer chamber 30 and four chambers 40A to 40D.
- the transfer chamber 30 has, for example, a sealable structure formed to have a polygonal shape (hexagonal shape in the illustrated example) when viewed from above.
- the transfer chamber 30 is connected to each of the chambers 40A-40D via a gate valve that can be hermetically sealed.
- the transfer chamber 30 includes a substrate transport mechanism 31 for transporting the substrate W. As shown in FIG.
- the substrate transport mechanism 31 has two transport arms 31A and 31B that hold the substrate W substantially horizontally.
- the substrate transport mechanism 31 uses transport arms 31A and 31B to take out the substrate W from the load lock chambers 25A and 25B and transport the taken out substrate W to one of the chambers 40A to 40D.
- the processing unit SU loads the substrates W transported to the load lock chambers 25A and 25B into the chambers 40A to 40D via the transfer chamber 30, and processes the substrates in the chambers 40A to 40D. .
- the processing unit SU takes out the processed substrate W from the chambers 40A to 40D, and unloads the taken out substrate W via the transfer chamber 30 to the load lock chambers 25A and 25B.
- An example of substrate processing performed by the chambers 40A to 40D is film formation processing such as CVD (Chemical Vapor Deposition).
- the substrate processes performed by chambers 40A-40D may be diffusion processes, etching processes, ashing processes, sputtering processes, and the like. In the example of FIG.
- the single-wafer type substrate processing apparatus 100 is shown in which the substrates W are taken out one by one from the cassette container 11 and processed. It may be a batch-type substrate processing apparatus or the like that processes the wafers in a single batch, and the transfer unit HU can adopt any configuration.
- the chambers 40A to 40D are also simply referred to as the chambers 40 (see FIG. 3) when there is no need to distinguish between the chambers 40A to 40D.
- FIG. 3 is a cross-sectional view showing a configuration example of the chamber 40.
- FIG. A chamber 40 shown as an example in FIG. 3 is an apparatus for performing a film forming process on a substrate W, and includes a processing chamber 41 in which substrate processing is performed, and an exhaust chamber 42 communicating with the processing chamber 41. .
- the processing chamber 41 has a plate-shaped ceiling portion 411 and a bottom portion 413 , and a side wall portion 412 connecting the ceiling portion 411 and the bottom portion 413 .
- the processing chamber 41 has, for example, a substantially cylindrical shape.
- a loading/unloading port for loading/unloading the substrate W to/from the transfer chamber 30 is formed in the side wall portion 412 .
- An opening 413 a is formed in the center of the bottom portion 413 .
- the exhaust chamber 42 is connected to the bottom portion 413 of the processing chamber 41 so as to communicate with the opening portion 413a.
- the exhaust chamber 42 has an annular flange portion 421 , a plate-like bottom portion 423 , and a side wall portion 422 connecting the flange portion 421 and the bottom portion 423 .
- the flange portion 421 is joined to the bottom portion 413 of the processing chamber 41 .
- An exhaust hole 424 is formed in the side wall portion 422 .
- the processing chamber 41 and the exhaust chamber 42 are configured so that their internal spaces can be maintained in a reduced pressure atmosphere (vacuum state).
- An O-ring as a sealing member is interposed between the joint portion of the processing chamber 41 and the exhaust chamber 42 and the joint portion of each member constituting the processing chamber 41 and the exhaust chamber 42 in order to ensure the airtightness of the joint portion. is dressed.
- the chamber 40 includes an exhaust device 51 arranged outside the processing chamber 41 and the exhaust chamber 42 , an exhaust pipe 52 connecting the exhaust hole 424 and the exhaust device 51 , and a valve 53 provided in the middle of the exhaust pipe 52 .
- the valve 53 maintains the airtightness of the processing chamber 41 and the exhaust chamber 42 in the closed state, and allows the exhaust device 51 to depressurize the processing chamber 41 and the exhaust chamber 42 in the open state.
- the processing chamber 41 and the exhaust chamber 42 are decompressed to a required degree of vacuum by operating the exhaust device 51 .
- the chamber 40 includes a susceptor 61 arranged within the processing chamber 41 and a support member 62 that supports the susceptor 61 within the processing chamber 41 and the exhaust chamber 42 .
- the susceptor 61 is a substrate mounting table for supporting the substrate W horizontally.
- the susceptor 61 has a substrate mounting surface (upper surface) on which the substrate W is mounted and a lower surface on the opposite side.
- One end of a support member 62 is fixed to the central portion of the lower surface of the susceptor 61 .
- the other end of the support member 62 is fixed to the bottom 423 of the exhaust chamber 42 .
- the susceptor 61 has a plurality of support pins protruding and retractable with respect to the substrate mounting surface.
- the plurality of support pins are vertically displaced by an arbitrary elevating mechanism, and are configured to transfer the substrate W to and from the substrate transport mechanism 31 at the elevated position.
- the chamber 40 includes a heater 63, a heater power supply 64, and a temperature sensor TS.
- the heater 63 and the temperature measuring portion of the temperature sensor TS are embedded in the susceptor 61 .
- the heater power supply 64 is arranged outside the processing chamber 41 and the exhaust chamber 42 .
- the heater 63 is connected to a heater power source 64 via, for example, wiring that passes through the interior of the support member 62 .
- the heater power supply 64 supplies electrical output to the heater 63 to heat the substrate W placed on the susceptor 61 to a desired temperature.
- the temperature of the susceptor 61 is measured by a temperature sensor TS.
- the temperature sensor TS is configured using known members such as thermocouples and thermistors.
- the chamber 40 has a shower head 71 provided on the ceiling 411 of the processing chamber 41 .
- the showerhead 71 has a gas diffusion space 71a formed therein and a plurality of gas discharge holes 71b formed to penetrate from the gas diffusion space 71a toward the susceptor 61. As shown in FIG.
- the chamber 40 is provided on the opposite side of the showerhead 71 from the plurality of gas discharge holes 71b, and includes a gas introduction pipe 72 communicating with the gas diffusion space 71a, and a gas supply pipe 72 disposed outside the processing chamber 41 and the exhaust chamber 42.
- the gas supply source 73 supplies the shower head 71 with a film forming source gas used for film forming processing, a cleaning gas for cleaning the inside of the processing chamber 41 and the exhaust chamber 42 , and the inside of the processing chamber 41 and the exhaust chamber 42 .
- a purge gas or the like is supplied to replace the atmosphere of the These gases are supplied to the gas diffusion space 71a through the gas pipe 74 and the gas introduction pipe 72, and discharged into the processing chamber 41 through the plurality of gas discharge holes 71b.
- the chamber 40 includes a high-frequency power supply 76 arranged outside the processing chamber 41 and the exhaust chamber 42, wiring 77 connecting the shower head 71 and the high-frequency power supply 76, and a matching device 78 provided in the middle of the wiring 77. ing.
- a high-frequency power supply 76 supplies high-frequency power to the shower head 71 for plasmatizing the film-forming raw material gas supplied into the processing chamber 41 .
- the substrate W placed on the susceptor 61 can be subjected to the film formation process. That is, the substrate W to be processed is transported into the processing chamber 41 in a vacuum state, the substrate W placed on the susceptor 61 is heated by the heater 63, and the raw material gas is supplied from the shower head 71 toward the substrate W. Thus, a thin film is formed on the surface of the substrate W.
- High-frequency power may be supplied from the high-frequency power supply 76 to the shower head 71 in order to promote the film formation reaction.
- the material gas supplied into the processing chamber 41 through the shower head 71 can be plasmatized to form a film.
- the chamber 40 that performs the film forming process on the substrate W has been described.
- FIG. 4 is a block diagram for explaining the configuration of the control system of the substrate processing apparatus 100.
- the substrate processing apparatus 100 includes various sensors S1 to S3, edge devices 110 to 130 to which data output from the sensors S1 to S3 are respectively input, actuators A1 to A3 controlled by the edge devices 110 to 130, and apparatus A control device 150 is provided to control the overall operation.
- the sensors S1 to S3 are provided in the substrate processing apparatus 100 and are sensors for measuring physical quantities to be measured in time series.
- the sensors S1 to S3 output time-series data (hereinafter also referred to as sensor data) indicating measurement results to the edge devices 110 to 130 in the subsequent stage.
- An example of the sensor S1 is an RF (Radio Frequency) sensor.
- the RF sensor is installed on the output side of the high frequency power supply 76 and measures the RF power of the high frequency power supply 76 in time series.
- the RF sensor may be a sensor that measures voltage, current, capacitance, impedance, phase, load power, etc. over time.
- An example of sensor S2 is a temperature sensor.
- the temperature sensor includes a temperature sensor TS whose temperature measuring portion is embedded in the susceptor 61 and measures the temperature of the substrate mounting surface (that is, the temperature of the substrate W to be processed) in time series.
- the temperature sensor may be a sensor that measures the electrode temperature, the internal temperature of the processing chamber 41, etc. in time series.
- An example of sensor S3 is a torque sensor.
- the torque sensor measures the torque received by the actuator (for example, actuator A3) mounted on the substrate transfer mechanisms 21 and 31 in time series.
- the sensors S1 to S3 mounted on the substrate processing apparatus 100 are not limited to the RF sensor, temperature sensor, and torque sensor described above. Moreover, the number of sensors mounted on the substrate processing apparatus 100 is not limited to three.
- the substrate processing apparatus 100 may include one or more sensors including gas sensors, OES (Optical Emission Spectroscopy) sensors, flow sensors, and the like.
- the gas sensor is a sensor that is installed in the processing chamber 41 and measures the amount of a specific component of the gas that fills the inside of the processing chamber 41 in time series. A mass spectrometer, an infrared spectrometer, a gas chromatograph, or the like is used as the gas sensor.
- the OES sensor is installed in the processing chamber 41 and is a sensor that measures the plasma emission intensity inside the processing chamber 41 in time series.
- the flow rate sensor is installed in the processing chamber 41 and is a sensor that measures the flow rate of the gas introduced into the processing chamber 41 in time series.
- the sampling rate of the sensors S1 to S3 is arbitrary and is appropriately set for each sensor.
- the RF sensor has a sampling rate of 1-10 ⁇ sec.
- the sampling rate of the temperature sensor is, for example, 100 msec.
- a sampling rate of the torque sensor is, for example, 2.5 msec.
- the sampling rate of the OES sensor is, for example, 10-100 msec.
- the sampling rate of the gas sensor is, for example, 1-10 msec.
- the sampling rate of the flow sensor is, for example, 10 msec.
- the edge devices 110-130 execute a process of estimating the state of the substrate processing apparatus 100, a process of estimating control values for the actuators A1-A3, and the like, based on sensor data input from the sensors S1-S3.
- the edge devices 110 to 130 for example, output state estimation results to the control device 150, and control the operations of the actuators A1 to A3 based on the control value estimation results.
- the internal configurations of the edge devices 110 to 130 and the details of the processing executed by the edge device 110 will be detailed later.
- the actuators A1-A3 are the control targets of the edge devices 110-130.
- the actuator is not limited to a mechanical element such as a motor that converts electrical energy into physical momentum, and various drive circuits including electrical circuits are collectively referred to as actuators.
- the actuator A1 may be the high frequency power supply 76.
- the edge device 110 acquires time-series data of RF power from the RF sensor, estimates a control value for the high-frequency power supply 76 based on the acquired time-series data, and operates the high-frequency power supply 76 based on the estimated control value. to control.
- the actuator A2 may be the heater power supply 64.
- the edge device 120 acquires temperature time-series data from the temperature sensor TS, estimates a control value for the heater power supply 64 based on the acquired time-series data, and operates the heater power supply 64 based on the estimated control value. to control.
- the actuator A3 may be a motor included in the substrate transport mechanisms 21 and 31.
- the edge device 130 acquires time-series data of the torque received by the motor drive shaft from the torque sensor, estimates control values for the substrate transport mechanisms 21 and 31 based on the acquired time-series data, and estimates the control values The operation of the substrate transfer mechanisms 21 and 31 is controlled based on.
- one sensor and one actuator are connected to each of the edge devices 110 to 130, but the number of sensors and actuators connected to the edge devices 110 to 130 is limited to one. not. Multiple sensors and multiple actuators may be connected to each of the edge devices 110-130.
- the substrate processing apparatus 100 is configured to include the three edge devices 110 to 130, but the number of edge devices mounted on the substrate processing apparatus 100 is not limited to three. It is only necessary to have one or more edge devices.
- the control device 150 controls the overall operation of the substrate processing apparatus 100 based on various information input from the edge devices 110 to 130 and various information input from the outside.
- the internal configuration of the control device 150 and the contents of the processing executed by the control device 150 will be detailed later.
- FIG. 5 is a block diagram showing the internal configuration of the edge device 110 included in the substrate processing apparatus 100.
- the edge device 110 is a dedicated or general-purpose computer provided in the substrate processing apparatus 100, and includes a control unit 111, a storage unit 112, an input unit 113, an output unit 114, a communication unit 115, and the like.
- the edge device 110 monitors the state of the substrate processing apparatus 100 and controls the operation of the actuator A1 based on sensor data from the sensor S1 input through the input unit 113 .
- the control unit 111 includes a CPU (Central Processing Unit), ROM (Read Only Memory), RAM (Random Access Memory), and the like.
- the ROM included in the control unit 111 stores a control program and the like for controlling the operation of each hardware unit included in the edge device 110 .
- the CPU in the control unit 111 reads and executes a control program stored in the ROM and various computer programs stored in the storage unit 112, and controls the operation of each hardware unit to control the operation of the entire device. functions as an information processing device.
- the RAM provided in the control unit 111 temporarily stores data used during execution of the calculation.
- control unit 111 is configured to include a CPU, a ROM, and a RAM, but the configuration of the control unit 111 is not limited to the above.
- the control unit 111 includes, for example, GPU (Graphics Processing Unit), FPGA (Field Programmable Gate Array), DSP (Digital Signal Processor), quantum processor, volatile or nonvolatile memory, etc.
- One or more control circuits or operations It may be a circuit.
- the control unit 111 may also have functions such as a clock that outputs date and time information, a timer that measures the elapsed time from when a measurement start instruction is given to when a measurement end instruction is given, and a counter that counts the number.
- the storage unit 112 includes storage devices such as HDD (Hard Disk Drive), SSD (Solid State Drive), and EEPROM (Electronically Erasable Programmable Read Only Memory).
- the storage unit 112 stores various computer programs executed by the control unit 111 and various data used by the control unit 111 .
- the computer programs stored in the storage unit 112 include a learning processing program PG11 for generating learning models (observation model MD11 and control model MD12), which will be described later, and a state of the substrate processing apparatus 100 and actuator A1 using the learning models. includes an estimation processing program PG12 for estimating the control value of .
- These computer programs may be a single computer program, or may be composed of a plurality of computer programs. Also, these computer programs may partially use existing libraries.
- Computer programs such as the learning processing program PG11 and the estimation processing program PG12 stored in the storage unit 112 are provided by a non-temporary recording medium RM10 that records the computer programs in a readable manner.
- the recording medium RM10 is a portable memory such as a CD-ROM, USB memory, SD (Secure Digital) card, micro SD card, compact flash (registered trademark).
- the control unit 111 uses a reading device (not shown) to read various computer programs from the recording medium RM10, and causes the storage unit 112 to store the read various computer programs.
- the computer programs stored in storage unit 112 may be provided by communication. In this case, the control unit 111 acquires the computer program through the communication unit 115 and stores the acquired computer program in the storage unit 112 .
- the storage unit 112 has a learning model configured to output information about the substrate processing apparatus 100 when time-series data output from the sensor S1 is input.
- the storage unit 112 stores, as information defining a learning model, for example, configuration information of layers included in the learning model, information on nodes included in each layer, parameters for weighting and biasing between nodes, and the like.
- the edge device 110 includes an observation model MD11 and a control model MD12 as learning models.
- the observation model MD11 is a model for estimating the state of the substrate processing apparatus 1 .
- the control model MD12 is a model for estimating the control value of the actuator A1 to be controlled by the edge device 110 .
- the configuration includes both the observation model MD11 and the control model MD12 as the learning model, but the configuration may include only one of them.
- one observation model MD11 and one control model MD12 are provided. may be prepared for each
- the input unit 113 has an interface for connecting the sensor S1.
- a sensor S1 connected to the input unit 113 is, for example, an RF sensor.
- the sensor S1 connected to the input unit 113 is not limited to the above, and any sensor necessary for observing the state (performance) of the process is connected.
- Time-series data (sensor data) input through the input unit 113 is temporarily stored in the storage unit 112 .
- the output unit 114 has an interface for connecting the actuator A1 to be controlled by the edge device 110 .
- Control unit 111 estimates a control value using control model MD12 described above, and outputs a control command based on the estimated control value from output unit 114 to actuator A1, thereby controlling the operation of actuator A1.
- the communication unit 115 has a communication interface for transmitting and receiving various data to and from the control device 150 .
- a communication interface of the communication unit 115 a communication interface conforming to a communication standard such as LAN can be used.
- the communication unit 115 transmits the data to the control device 150 , and when receiving data transmitted from the control device 150 , outputs the received data to the control unit 111 . do.
- FIG. 6 is a schematic diagram showing a configuration example of the observation model MD11 provided in the edge device 110.
- the observation model MD11 When time series data (sensor data) obtained from the sensor S1 is input, the observation model MD11 outputs information about the state of the substrate processing apparatus 100 provided with the sensor S1 (hereinafter referred to as state information). Configured. Any model that can analyze time-series data can be adopted as the observation model MD11.
- the observation model MD11 is a learning model of machine learning including deep learning, and constructed by RNN (Recurrent Neural Network), LSTM (Long Short-Term Memory), and the like.
- the observation model MD11 can be CNN (Convolutional Neural Network), R-CNN (Region based CNN), YOLO (You Only Look Once), SSD (Single Shot Multibox Detector), GAN (Generative Adversarial Network), SVM ( It may be a learning model based on a support vector machine), a decision tree, or the like.
- the observation model MD11 may be a learning model other than deep learning, such as an autoregressive model, a moving average model, and an autoregressive moving average model.
- the observation model MD11 includes an input layer MD11a, intermediate layers MD11b and MD11c, an output layer MD11d, and the like.
- the observation model MD11 is configured to include two intermediate layers MD11b and MD11c, but may be configured to include three or more intermediate layers.
- One or more nodes are provided in the input layer MD11a, the intermediate layers MD11b and MD11c, and the output layer MD11d.
- the nodes in each layer are unidirectionally coupled with the nodes in the preceding and succeeding layers with desired weights and biases.
- the same number of data as the number of nodes included in the input layer MD11a is input to the input layer MD11a of the observation model MD11.
- the sensor data input to the nodes of the input layer MD11a are time-series data obtained from the sensor S1.
- the sensor data input to the input layer MD11a may be a plurality of temporally continuous measured values, or may be a graph (image data) in which the measured values are plotted against time.
- the input sensor data is output to the nodes provided in the first intermediate layer MD11b through the nodes provided in the input layer MD11a.
- the data input to the first intermediate layer MD11b is output to the nodes included in the second intermediate layer MD11c through the nodes forming the intermediate layer MD11b.
- feature quantities of sensor data are extracted using activation functions including weights and biases set between nodes in each layer.
- the feature values of the sensor data extracted by the intermediate layers MD11b and MD11c are output to the output layer MD11d and taken out of the observation model MD11.
- the output layer MD11d executes a preset calculation using the feature amount input from the second intermediate layer MD11c, and outputs status information of the substrate processing apparatus 100 as a final calculation result.
- the state information output from the output layer MD11d includes an evaluation value representing the state of the substrate processing apparatus 100 and the like.
- the evaluation value is, for example, information representing the degree of deterioration of a specific component that configures the substrate processing apparatus 100 .
- the evaluation value may be information representing the presence or absence of failure of a particular component.
- Specific components that make up the substrate processing apparatus 100 include an exhaust system 51, a heater power supply 64, a gas supply source 73, a high frequency power supply 76, and the like.
- the observation model MD11 is learned by any learning algorithm. Supervised learning can be used as a learning algorithm.
- a data set including the sensor data of the sensor S1 and the correct data to be output by the observation model MD11 is used as the training data so that the state information of the substrate processing apparatus 100 is output when the sensor data is input.
- be learned by Training data may be given by an administrator or the like of the substrate processing apparatus 100 .
- the sensor data of the sensor S1, the date and time when the component was replaced, the date and time when the failure was discovered, etc. are accumulated as history data. Based on this history data, the sensor data of the sensor S1 and correct data indicating the presence or absence of deterioration or the presence or absence of failure at the date and time when the sensor data was obtained may be given as training data.
- the observation model MD11 shown as an example in FIG. 6 has a configuration including an input layer MD11a, intermediate layers MD11b and MD11c, and an output layer MD11d, but the configuration of the observation model MD11 is not limited to that shown in FIG.
- the observation model MD11 may be a model in which only the relationship between input and output (that is, the relationship between sensor data and state information) is defined without including the intermediate layers MD11b and 11c.
- supervised learning was explained as the learning algorithm for the observation model MD11, but it is possible to generate the observation model MD11 using any learning algorithm including unsupervised learning.
- control unit 111 of the edge device 110 executes the calculation by the observation model MD11, it acquires the state information from the output layer MD11d and acquires the feature amount of the sensor data extracted by the intermediate layers MD11b and MD11c.
- the control unit 111 transmits the acquired state information of the substrate processing apparatus 100 and the feature amount of the sensor data to the control device 150 , which is a higher-level device of the edge device 110 .
- FIG. 7 is a schematic diagram showing a configuration example of the control model MD12 provided in the edge device 110.
- the control model MD12 When time-series data (sensor data) obtained from the sensor S1 is input, the control model MD12 outputs information (hereinafter referred to as control information) regarding the control value of the substrate processing apparatus 100 provided with the sensor S1. configured to That is, when sensor data is input to the input layer MD12a of the control model MD12, the intermediate layers MD12b and MD12c execute calculations for extracting feature amounts of the sensor data. The feature values obtained from the intermediate layers MD12b and MD12c are output to the output layer MD12d and taken out of the control model MD12.
- the output layer MD12d executes a predetermined calculation using the feature amount input from the second intermediate layer MD12c, and outputs control information of the substrate processing apparatus 100 as a final calculation result.
- the feature amount of the sensor data output from the intermediate layer MD 12 c and the control information output from the output layer MD 12 d are input to the control section 111 .
- the control information output from the output layer MD 12 d includes control values for controlling at least one component of the substrate processing apparatus 100 .
- the control model MD12 may be learned by supervised learning or by unsupervised learning. Also, the control model MD12 may be learned by reinforcement learning. For example, a reward may be given according to the state of the substrate processing apparatus 100, and the value in reinforcement learning may be learned so as to maximize the total reward obtained in the future.
- Q-learning which is one type of reinforcement learning, learns a value Q for selecting an action (control value) under certain environmental conditions. At the time Q-learning is started, the correct value Q for the combination of the state of the substrate processing apparatus 100 and the action (control value) is not known. Therefore, various control values are selected under certain work data, and the total reward is calculated based on the reward given for the action (control based on the control value) at that time, and the better control value is selected. It learns the correct value Q by going.
- the control model MD12 is not limited to the model described above, and may be another model capable of analyzing time-series data.
- the control model MD12 may be a learning model other than deep learning, such as an autoregressive model, a moving average model, and an autoregressive moving average model.
- the configuration of the control model MD12 is not limited to that shown in FIG.
- the control model MD12 may be a model in which only the relationship between input and output (that is, the relationship between sensor data and control information) is defined without including the intermediate layers MD12b and MD12c.
- control unit 111 of the edge device 110 executes the calculation by the control model MD12, it acquires the control information from the output layer MD12d and acquires the feature amount of the sensor data calculated by the intermediate layers MD12b and MD12c.
- the control unit 111 transmits the acquired control information of the substrate processing apparatus 100 and the feature amount of the sensor data to the control device 150 which is a higher-level device of the edge device 110 . Also, the control unit 111 controls the operation of the actuator A1 based on the control information acquired from the control model MD12.
- the feature amount is extracted from the intermediate layers MD11c and MD12c, but the final calculation result obtained from the output layers MD11d and MD12d may be regarded as the feature amount of the sensor data.
- the control unit 111 may directly extract the feature amount from the sensor data. Appropriate statistical processing such as peak detection and interval averaging is used to extract the feature amount.
- the control unit 111 may detect an abnormal location appearing in the sensor data and weight the data of the detected abnormal location to extract the feature quantity. Further, the control unit 111 may extract snapshots of time-series data including abnormal points appearing in sensor data as feature amounts.
- the internal configuration of the edge device 110 has been described in FIGS. 5 to 7, the internal configurations of the edge devices 120 and 130 are the same. That is, the edge devices 120 and 130 each have an observation model and a control model, and estimate the state of the substrate processing apparatus 100 and the control values of the actuators A1 and A2 based on the sensor data input from the sensors S2 and S3.
- the edge devices 120 and 130 use the state information of the substrate processing apparatus 100 obtained from the observation model and the control model, the control information of the actuators A1 and A2, and the characteristic amounts of the sensor data output from the sensors S2 and S3 to edge devices 120 and 130. It is transmitted to the control device 150, which is the host device of the devices 120 and 130.
- the edge devices 120 and 130 control the operations of the actuators A2 and A3, respectively, based on the control information acquired from the control model.
- FIG. 8 is a block diagram showing the internal configuration of the control device 150 provided in the substrate processing apparatus 100.
- the control device 150 is a dedicated or general-purpose computer provided inside the substrate processing apparatus 100, and includes a control unit 151, a storage unit 152, a first communication unit 153, a second communication unit 154, an operation unit 155, a display unit 156, and the like. Prepare.
- the control device 150 collects data (characteristic amounts of sensor data) transmitted from the edge devices 110 to 130 and accumulates them in the database DB20 within the storage unit 152 .
- the control device 150 generates a second learning model that absorbs individual differences in sensors based on the medium-term data accumulated in the database DB20.
- the control unit 151 includes a CPU, ROM, RAM, and the like.
- the ROM included in the control unit 151 stores a control program and the like for controlling the operation of each hardware unit included in the control device 150 .
- the CPU in the control unit 151 reads and executes control programs stored in the ROM and various computer programs stored in the storage unit 152, and controls the operation of each hardware unit.
- the control unit 151 is not limited to the configuration described above, and may be one or more control circuits or arithmetic circuits including a GPU, FPGA, DSP, quantum processor, volatile or nonvolatile memory, or the like.
- the control unit 151 may also have functions such as a clock that outputs date and time information, a timer that measures the elapsed time from when a measurement start instruction is given to when a measurement end instruction is given, and a counter that counts the number.
- the storage unit 152 includes storage devices such as HDD, SSD, and EEPROM.
- the storage unit 152 includes the database DB20 described above.
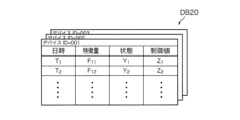
- FIG. 9 is a conceptual diagram showing a configuration example of the database DB20.
- the database DB20 stores date and time information and feature amounts of sensor data in association with identification information (device IDs) of the edge devices 110-130. Furthermore, the database DB20 may store state information and control information of the substrate processing apparatus 100 .
- the storage unit 152 stores various computer programs executed by the control unit 151 and various data used by the control unit 151.
- the computer programs stored in the storage unit 152 include a learning processing program PG21 for generating a second learning model, and an estimation process for estimating the state and control values of the substrate processing apparatus 100 using the second learning model.
- a program PG22 is included.
- a computer program stored in the storage unit 152 is provided by a non-temporary recording medium RM20 that records the computer program in a readable manner.
- the computer programs stored in the storage unit 152 may be provided by communication.
- the storage unit 152 includes a second learning model configured to output information about the substrate processing apparatus 100 when the feature amount of sensor data is input.
- the storage unit 152 stores, as information defining the second learning model, layer configuration information included in the second learning model, node information included in each layer, weighting and bias information between nodes, and the like.
- the control device 150 includes an observation model MD21 and a control model MD22 as second learning models.
- Observation model MD21 is a model for estimating the state of substrate processing apparatus 100 .
- the control model MD22 is a model for estimating control values used in the substrate processing apparatus 100 . Since the configurations of the observation model MD21 and the control model MD22 are the same as the configurations of the observation model MD11 and the control model MD12 provided in the edge devices 110 to 130, detailed description thereof will be omitted.
- both the observation model MD21 and the control model MD22 are provided as the second learning model, but it may be provided with only one of them. Further, in the present embodiment, as the second learning model, one observation model MD21 and one control model MD22 are provided, but the observation model MD21 may be prepared for each observation target, and the control model MD22 may It may be prepared for each object.
- the first communication unit 153 has a communication interface for transmitting and receiving various data to and from the edge devices 110-130.
- a communication interface of the first communication unit 153 a communication interface conforming to a communication standard such as LAN can be used.
- the first communication unit 153 transmits the data to the destination edge devices 110 to 130.
- the first communication unit 153 receives data transmitted from the edge devices 110 to 130.
- the obtained data is output to the control unit 151 .
- the second communication unit 154 has a communication interface for transmitting and receiving various data.
- the communication interface provided in the second communication unit 154 is, for example, a communication interface conforming to LAN communication standards used in WiFi (registered trademark) and Ethernet (registered trademark).
- WiFi registered trademark
- Ethernet registered trademark
- the operation unit 155 includes operation devices such as a touch panel, keyboard, and switches, and receives various operations and settings by administrators and the like.
- the control unit 151 performs appropriate control based on various kinds of operation information given from the operation unit 155, and stores setting information in the storage unit 152 as necessary.
- the display unit 156 has a display device such as a liquid crystal monitor or organic EL (Electro-Luminescence), and displays information to be notified to the administrator or the like according to instructions from the control unit 151 .
- a display device such as a liquid crystal monitor or organic EL (Electro-Luminescence), and displays information to be notified to the administrator or the like according to instructions from the control unit 151 .
- FIG. 10 is a block diagram showing the internal configuration of the device group server 200.
- the device group server 200 includes a control unit 201, a storage unit 202, a communication unit 203, an operation unit 204, a display unit 205, and the like.
- the apparatus group server 200 collects data transmitted from a plurality of substrate processing apparatuses 100 and accumulates the data in the database DB30 provided within the storage unit 202 .
- the device group server 200 generates a third learning model that absorbs individual differences between devices based on the long-term data accumulated in the database DB30.
- the control unit 201 includes a CPU, ROM, RAM, and the like.
- the ROM included in the control unit 201 stores a control program and the like for controlling the operation of each hardware unit included in the device group server 200 .
- the CPU in the control unit 201 reads and executes control programs stored in the ROM and various computer programs stored in the storage unit 202, and controls the operation of each hardware unit.
- the control unit 201 is not limited to the configuration described above, and may be one or more control circuits or arithmetic circuits including a GPU, FPGA, DSP, quantum processor, volatile or nonvolatile memory, or the like.
- the control unit 201 may also have functions such as a clock that outputs date and time information, a timer that measures the elapsed time from when a measurement start instruction is given to when a measurement end instruction is given, and a counter that counts the number.
- the storage unit 202 includes storage devices such as HDD, SSD, and EEPROM.
- the storage unit 202 includes the database DB30 described above.
- FIG. 11 is a conceptual diagram showing a configuration example of the database DB30.
- the database DB30 stores the date and time information and the feature amount of the sensor data in association with the identifier (apparatus ID) of the substrate processing apparatus 100 .
- the database DB30 may further store state information indicating the state of the substrate processing apparatus 100 and control information used for controlling the substrate processing apparatus 100 .
- the storage unit 202 stores various computer programs executed by the control unit 201 and various data used by the control unit 201.
- the computer programs stored in the storage unit 202 include a learning processing program PG31 for generating a third learning model and an estimation processing program PG32 for estimating the state and control values of the substrate processing apparatus 100.
- a computer program stored in the storage unit 202 is provided by a non-temporary recording medium RM30 that records the computer program in a readable manner.
- the computer programs stored in the storage unit 202 may be provided by communication.
- the storage unit 202 includes a third learning model configured to output information about the substrate processing apparatus 100 when the feature amount of sensor data is input.
- the storage unit 202 stores, as information defining the third learning model, configuration information of layers included in the third learning model, information on nodes included in each layer, information on weights and biases between nodes, and the like.
- the device group server 200 includes an observation model MD31 and a control model MD32 as third learning models.
- Observation model MD31 is a model for estimating the state of substrate processing apparatus 100 .
- the control model MD32 is a model for estimating control values used in the substrate processing apparatus 100 . Since the configurations of the observation model MD31 and the control model MD32 are the same as the configurations of the observation model MD21 and the control model MD22 provided in the control device 150, detailed description thereof will be omitted.
- both the observation model MD31 and the control model MD32 are provided as the third learning model, but only one of them may be provided. Further, in the present embodiment, as the third learning model, one observation model MD31 and one control model MD32 are provided, but the observation model MD31 may be prepared for each observation target, and the control model MD32 may It may be prepared for each object.
- the communication unit 203 has a communication interface for transmitting and receiving various data.
- the communication interface provided in the communication unit 203 is, for example, a communication interface conforming to the LAN communication standard used in WiFi (registered trademark) and Ethernet (registered trademark).
- WiFi registered trademark
- Ethernet registered trademark
- the operation unit 204 includes operation devices such as a touch panel, keyboard, and switches, and receives various operations and settings by administrators and the like.
- the control unit 201 performs appropriate control based on various kinds of operation information given from the operation unit 204, and stores setting information in the storage unit 202 as necessary.
- the display unit 205 has a display device such as a liquid crystal monitor or an organic EL, and displays information to be notified to the administrator or the like according to instructions from the control unit 201 .
- the device group server 200 is configured to include the operation unit 204 and the display unit 205, but the operation unit 204 and the display unit 205 are not essential components in the device group server 200. If the operation unit 204 is not provided, the device group server 200 may receive operations from an external computer communicably connected via the communication unit 203 . If the display unit 205 is not provided, the device group server 200 may transmit information to be notified to the administrator or the like from the communication unit 203 to the external computer and have the external computer display the information.
- edge devices 110 to 130 generate first learning models (observation model MD11 and control model MD12) in the learning phase before the start of operation.
- FIG. 12 is a flowchart showing the procedure for generating the first learning model by the edge device 110.
- the control unit 111 of the edge device 110 collects sensor data output from the sensor S1 in time series through the input unit 113 (step S101). The sensor data collection period is, for example, one month.
- the control unit 111 receives state information of the substrate processing apparatus 100 from the outside, and acquires control values to be output from the output unit 114 to the substrate processing apparatus 100 .
- the control values of the substrate processing apparatus 100 that are used before the learning of the control model MD12 is completed are determined, for example, with reference to a preset recipe. These state information and control values are stored in the storage unit 112 together with the sensor data as training data when the observation model MD11 and the control model MD12 are learned.
- the control unit 111 selects a set of training data from the training data stored in the storage unit 112 (step S102).
- the control unit 111 inputs the sensor data included in the selected set of training data to the observation model MD11 and the control model MD12, respectively, and executes the calculations of the observation model MD11 and the control model MD12 (step S103). It is assumed that the model parameters of the observation model MD11 and the control model MD12 are set to initial values before learning is started.
- the control unit 111 evaluates the calculation results of the observation model MD11 and the control model MD12 (step S104), and determines whether the learning of the observation model MD11 and the control model MD12 has been completed (step S105).
- the control unit 111 can evaluate the computation result using an error function (also called objective function, loss function, or cost function) based on the model computation result and the state or control value included as correct data. For example, in the process of optimizing (minimizing or maximizing) an error function by a gradient descent method such as the steepest descent method, if the error function becomes equal to or less than a threshold (or equal to or greater than a threshold), the observation model MD11 And it is determined that the learning of the control model MD12 is completed.
- an error function also called objective function, loss function, or cost function
- control unit 111 determines the parameter (node weights, biases, etc.) are updated (step S106), and the process returns to step S102.
- the control unit 111 can update the parameters in the model using the error backpropagation method that sequentially updates the weights and biases between nodes from the output layers MD11d and MD12d to the input layers MD11a and MD12a.
- control unit 111 stores them in the storage unit 112 as the first learning models (step S107). ).
- edge devices 120 and 130 can also generate the first learning model to be applied to each by the same generation procedure.
- the substrate processing system according to the present embodiment shifts to the operation phase after the first learning model is generated in each of the edge devices 110-130.
- the substrate processing system executes the following processes in the operation phase.
- FIG. 13 is a flow chart showing the procedure of processing executed inside the substrate processing apparatus 100 in the operation phase.
- the control unit 111 of the edge device 110 (120, 130) provided in the substrate processing apparatus 100 acquires the sensor data output in time series from the sensor S1 through the input unit 113 (step S121), the acquired The model is executed by inputting the sensor data into the observation model MD11 or the control model MD12 (step S122).
- the control unit 111 extracts feature amounts of sensor data from the intermediate layers MD11c and MD12c of the models MD11 and MD12 in the process of executing the models (step S123).
- the control unit 111 can, for example, extract feature amounts from the intermediate layers MD11c and MD12c.
- the control unit 111 may regard the final calculation results obtained from the output layers MD11d and MD12d as the feature amount of the sensor data, or may directly extract the feature amount from the sensor data.
- the control unit 111 transmits the extracted feature amount to the control device 150 together with the state information and control information estimation results obtained from the models MD11 and MD12 (step S124).
- the control unit 111 also controls the actuator A1 based on the state information and control information estimated by the models MD11 and MD12 (step S125). Note that the control unit 111 may perform the processing of steps S122 to S125 each time sensor data is acquired in step S122.
- the control unit 151 of the control device 150 receives the feature amount transmitted from the edge device 110 (120, 130) from the first communication unit 153 (step S126) and accumulates it in the database DB20 (step S127).
- the control unit 151 determines whether or not the period for collecting feature amounts has ended (step S128).
- the collection period is six months, for example, after the collection of the feature amount is started. Alternatively, it may be determined whether or not the collection period has ended based on the number of feature values accumulated in the database DB20. If the collection period has not ended (S128: NO), the control unit 151 returns the process to step S126, receives the feature amount, and repeats the process of accumulating it in the database DB20.
- learning of the observation model MD21 and the control model MD22 is executed to create models (step S129).
- the control unit 151 can create the observation model MD21 by performing learning using a set of feature values and state information stored in the database DB20 as training data.
- the control unit 151 can create a control model MD22 by performing learning using a set of feature amounts and control values stored in the database DB20 as training data.
- the procedure for creating the model is the same as the procedure for creating the observation model MD11 and the control model MD12.
- control unit 151 when receiving a new feature amount from the edge device 110 (120, 130), inputs the received feature amount to the observation model MD21 or the control model MD22, and executes the model (step S130).
- the control unit 151 determines whether or not the model used in the edge device 110 (120, 130) needs to be updated based on the execution result of step S130 (step S131). Since the control device 150 creates a model based on the accumulated medium-term data (for example, six-monthly data), the control unit 151 executes the model based on the newly acquired feature amount, thereby creating the model. Deviations from the indicated trend can be determined. The control unit 151 determines that the model provided in the edge device 110 (120, 130) is abnormal when the deviation from the trend indicated by the model is equal to or greater than the threshold. If the control unit 151 determines that there is no abnormality in the model, it determines that the model need not be updated (S131: NO), and the control unit 151 returns the process to step S130.
- control unit 151 determines that the model is abnormal, it determines that the model needs to be updated (S131: YES), and transmits a model re-learning instruction to the edge device 110 (120, 130). (Step S132).
- the control unit 111 of the edge device 110 determines whether or not the relearning instruction transmitted from the control device 150 has been received (step S133). When determining that the relearning instruction has not been received (S133: NO), the control unit 111 returns the process to step S121, and repeats the processes of steps S121 to S125.
- the control unit 111 executes relearning (step S134).
- the control unit 111 can relearn the observation model MD11 by performing additional learning using, for example, sensor data obtained from the sensor S1 and state information of the substrate processing apparatus 100 as training data. Further, the control unit 111 can relearn the control model MD12 by performing additional learning using, for example, sensor data obtained from the sensor S1 and control values used in the substrate processing apparatus 100 as training data. .
- the above training data may be used to re-learn the observation model MD11 and the control model MD12 from the beginning.
- the re-learning instruction is transmitted to the edge device 110 (120, 130). may be sent to the edge device 110 (120, 130).
- the correction value can be calculated from the error between the result of prediction by the second learning model (observation model MD21 and control model MD22) and the result of actual measurement.
- FIG. 14 is a flow chart showing the procedure of processing executed between the substrate processing apparatus 100 and the apparatus group server 200 in the operation phase.
- the control device 150 of the substrate processing apparatus 100 creates the observation model MD21 and the control model MD22 based on feature amounts obtained from the edge devices 110 to 130 in the operation phase.
- the control unit 151 of the control device 150 receives a new feature amount from the edge device 110 (120, 130) after creating the model (step S141), it inputs the received feature amount to the observation model MD21 or the control model MD22. and execute the model (step S142).
- the control unit 111 extracts the feature amount of the sensor data from the intermediate layer of each of the models MD21 and MD22 in the process of executing the model (step S143), and uses the extracted feature amount as the state information obtained from each model MD21 and MD22. It is transmitted to the device group server 200 together with the estimation result of the control information (step S144).
- the feature values of the sensor data are extracted from the intermediate layer of each model MD21, MD22 and transmitted to the device group server 200.
- the final A configuration may be adopted in which the calculation result is regarded as the feature amount of the sensor data and transmitted to the device group server 200 .
- the control unit 201 of the apparatus group server 200 receives the feature amount transmitted from the substrate processing apparatus 100 from the communication unit 203 (step S145), and accumulates it in the database DB30 (step S146).
- the control unit 201 determines whether or not the period for collecting feature amounts has ended (step S147).
- the collection period is, for example, 2 to 3 years from the start of collection of feature amounts. Alternatively, it may be determined whether or not the collection period has ended based on the number of feature values accumulated in the database DB30. If the collection period has not ended (S147: NO), the control unit 201 returns the process to step S145, receives the feature amount, and repeats the process of accumulating it in the database DB30.
- learning of the observation model MD31 and the control model MD32 is executed to create models (step S148).
- the control unit 201 can create the observation model MD31 by performing learning using a set of feature values and state information stored in the database DB30 as training data.
- the control unit 201 can create a control model MD32 by performing learning using a set of feature amounts and control values stored in the database DB30 as training data.
- the procedure for creating the model is the same as the procedure for creating the observation model MD11 and the control model MD12.
- control unit 201 When the control unit 201 receives a new feature amount from the substrate processing apparatus 100 after creating the model, it inputs the received feature amount to the observation model MD31 or the control model MD32, and executes the model (step S149).
- the control unit 201 determines whether or not it is necessary to update the model used in the edge device 110 (120, 130) of the substrate processing apparatus 100 based on the execution result of step S149 (step S150). Since the device group server 200 creates a model based on accumulated long-term data (for example, data for 2 to 3 years), the control unit 201 executes the model based on the newly acquired feature amount. , the deviation from the trend indicated by the model can be determined. The control unit 201 determines that the model provided in the edge device 110 (120, 130) is abnormal when the deviation from the trend indicated by the model is equal to or greater than the threshold. If the control unit 201 determines that there is no abnormality in the model, it determines that the model need not be updated (S150: NO), and the control unit 201 returns the process to step S149.
- controller 201 determines that the model is abnormal, it determines that the model needs to be updated (S150: YES), and transmits a model re-learning instruction to the substrate processing apparatus 100 (step S151). .
- the control unit 151 of the control device 150 included in the substrate processing apparatus 100 determines whether or not it has received a re-learning instruction transmitted from the apparatus group server 200 (step S152). When determining that the relearning instruction has not been received (S152: NO), the control unit 151 returns the process to step S141, and repeats the processes of steps S141 to S144.
- the control unit 151 instructs the edge device 110 (120, 130) to perform re-learning (step S153).
- the control unit 111 of the edge device 110 (120, 130) repeats the observation model MD11 by performing additional learning using, for example, sensor data obtained from the sensor S1 and state information of the substrate processing apparatus 100 as training data. can learn. Further, the control unit 111 can relearn the control model MD12 by performing additional learning using, for example, sensor data obtained from the sensor S1 and control values used in the substrate processing apparatus 100 as training data. .
- the above training data may be used to re-learn the observation model MD11 and the control model MD12 from the beginning.
- the edge device 110 (120, 130) re-learns the observation model MD11 and the control model MD12. and the control model MD22 may be re-learned.
- the control unit 151 of the control device 150 can re-learn the observation model MD21 using the feature values and state information accumulated in the database DB20 as training data.
- the control unit 151 can relearn the control model MD22 using the feature amounts and control values accumulated in the database DB20 as training data.
- the control unit 151 may relearn the observation model MD21 and the control model MD22 by additional learning, or may relearn the observation model MD21 and the control model MD22 from the beginning using the training data.
- a re-learning instruction is transmitted to the substrate processing apparatus 100.
- a correction value for correcting the calculation result of the model may be transmitted to the substrate processing apparatus 100 .
- the correction value can be calculated from the error between the prediction result by the third learning model (observation model MD31 and control model MD32) and the actual measurement result.
- the edge devices 110 to 130 may create a model for estimating deterioration of the components of the substrate processing apparatus 100 based on the acquired sensor data.
- Each edge device 110 to 130 transmits the feature amount extracted by each model to the control device 150 without transmitting sensor data, thus reducing the network load between the edge devices 110 to 130 and the control device 150. be able to.
- the control device 150 can create medium-term trend models (observation model MD21 and control model MD22) based on the feature amounts of the sensor data.
- each substrate processing apparatus 100 transmits the feature amount extracted from each model to the apparatus group server 200, the network load between the substrate processing apparatus 100 and the apparatus group server 200 can be reduced.
- the apparatus group server 200 can create a long-term trend model (observation model MD31 and control model MD32) that absorbs individual differences between apparatuses based on the feature amount transmitted from the substrate processing apparatus 100 .
- the trained first learning model (observation model MD11 and control model MD12) is deployed to each of the edge devices 110 to 130, good.
- the learned second learning model (observation model MD21 and control model MD22) may be deployed to the control device 150 of each substrate processing apparatus 100.
- Embodiment 2 describes a configuration for evaluating the completeness and soundness of the first learning model and outputting the evaluation result. Since the system configuration and the internal configurations of the substrate processing apparatus 100 and the apparatus group server 200 are the same as those of the first embodiment, description thereof will be omitted.
- the substrate processing apparatus 100 evaluates the completeness and soundness of the first learning models (observation model MD11 and control model MD12) provided in the edge devices 110 to 130 at appropriate timings during the learning phase or the operation phase, and outputs the evaluation results. to output
- a data set for evaluation is prepared in the substrate processing apparatus 100 in order to evaluate the first learning model (observation model MD11 and control model MD12).
- the first learning model observation model MD11 and control model MD12
- a set containing the sensor data of the sensor S1 and the correct data to be output by the observation model MD11 when the sensor data of the sensor S1 is input is used for evaluation.
- the control model MD12 provided in the edge device 110 a set containing the sensor data of the sensor S1 and the correct data to be output by the control model MD12 when the sensor data of the sensor S1 is input is evaluated. can be used as a dataset for The same applies to evaluation datasets for evaluating the edge devices 120 and 130 .
- the substrate processing apparatus 100 performs the first evaluation based on the difference between the estimated value obtained when the sensor data included in the evaluation data set is input to the observation model MD11 and the control model MD12 and the correct data included in the data set. 1 It is possible to evaluate the completeness and soundness of the learning model.
- FIG. 15 is a schematic diagram showing a display example of evaluation results.
- the example of FIG. 15 shows the results of evaluating the completeness and soundness of the observation model MD11 and the control model MD12 provided in each of the edge devices 110-130.
- indices A, B, and C indicate edge devices 110, 120, and 130, respectively.
- the upper graph shows how the degree of perfection of the observation model MD11 and the control model MD12 increases as the number of times of learning increases.
- the lower graph shows the health at the time of evaluation of the observation model MD11 and the control model MD12 of each edge device 110, 120, 130.
- the performance of each learning model can be displayed in a list.
- the completeness and soundness of the observation model MD11 and the control model MD12 can be improved.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Software Systems (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- General Physics & Mathematics (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Computational Linguistics (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Medical Informatics (AREA)
- Automation & Control Theory (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Image Analysis (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020247010659A KR20240058131A (ko) | 2021-08-31 | 2022-08-12 | 정보 처리 방법, 정보 처리 장치, 및 정보 처리 시스템 |
| JP2023545410A JPWO2023032637A1 (https=) | 2021-08-31 | 2022-08-12 | |
| CN202280058383.0A CN117897711A (zh) | 2021-08-31 | 2022-08-12 | 信息处理方法、信息处理装置以及信息处理系统 |
| US18/589,947 US20240202607A1 (en) | 2021-08-31 | 2024-02-28 | Information processing method, information processing apparatus, and information processing system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021141750 | 2021-08-31 | ||
| JP2021-141750 | 2021-08-31 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/589,947 Continuation US20240202607A1 (en) | 2021-08-31 | 2024-02-28 | Information processing method, information processing apparatus, and information processing system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023032637A1 true WO2023032637A1 (ja) | 2023-03-09 |
Family
ID=85412226
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/030708 Ceased WO2023032637A1 (ja) | 2021-08-31 | 2022-08-12 | 情報処理方法、情報処理装置、及び情報処理システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240202607A1 (https=) |
| JP (1) | JPWO2023032637A1 (https=) |
| KR (1) | KR20240058131A (https=) |
| CN (1) | CN117897711A (https=) |
| TW (1) | TW202314420A (https=) |
| WO (1) | WO2023032637A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026048631A1 (ja) * | 2024-09-02 | 2026-03-05 | 東京エレクトロン株式会社 | 情報処理方法、情報処理装置及び基板処理システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014228972A (ja) * | 2013-05-20 | 2014-12-08 | 日本電信電話株式会社 | 情報処理装置、情報処理システム、情報処理方法、および学習プログラム |
| JP2020006836A (ja) * | 2018-07-09 | 2020-01-16 | 株式会社シマノ | 作成装置、コンポーネント制御装置、作成方法、コンポーネント制御方法、コンピュータプログラムおよび学習モデル |
| WO2021119601A1 (en) * | 2019-12-13 | 2021-06-17 | Qualcomm Technologies, Inc. | Federated mixture models |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6720402B2 (ja) | 2017-03-21 | 2020-07-08 | 株式会社Preferred Networks | サーバ装置、学習済モデル提供プログラム、学習済モデル提供方法及び学習済モデル提供システム |
| JP6689507B2 (ja) | 2018-02-20 | 2020-04-28 | 株式会社Abeja | 情報処理システム |
-
2022
- 2022-08-12 JP JP2023545410A patent/JPWO2023032637A1/ja active Pending
- 2022-08-12 KR KR1020247010659A patent/KR20240058131A/ko active Pending
- 2022-08-12 CN CN202280058383.0A patent/CN117897711A/zh active Pending
- 2022-08-12 WO PCT/JP2022/030708 patent/WO2023032637A1/ja not_active Ceased
- 2022-08-17 TW TW111130908A patent/TW202314420A/zh unknown
-
2024
- 2024-02-28 US US18/589,947 patent/US20240202607A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014228972A (ja) * | 2013-05-20 | 2014-12-08 | 日本電信電話株式会社 | 情報処理装置、情報処理システム、情報処理方法、および学習プログラム |
| JP2020006836A (ja) * | 2018-07-09 | 2020-01-16 | 株式会社シマノ | 作成装置、コンポーネント制御装置、作成方法、コンポーネント制御方法、コンピュータプログラムおよび学習モデル |
| WO2021119601A1 (en) * | 2019-12-13 | 2021-06-17 | Qualcomm Technologies, Inc. | Federated mixture models |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026048631A1 (ja) * | 2024-09-02 | 2026-03-05 | 東京エレクトロン株式会社 | 情報処理方法、情報処理装置及び基板処理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20240058131A (ko) | 2024-05-03 |
| CN117897711A (zh) | 2024-04-16 |
| JPWO2023032637A1 (https=) | 2023-03-09 |
| TW202314420A (zh) | 2023-04-01 |
| US20240202607A1 (en) | 2024-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2023032636A1 (ja) | 情報処理方法、情報処理装置、及び基板処理システム | |
| US12242237B2 (en) | Methods and mechanisms for generating a data collection plan for a semiconductor manufacturing system | |
| US12429846B2 (en) | Systems and methods for adaptive troubleshooting of semiconductor manufacturing equipment | |
| US20220284342A1 (en) | Systems and methods for process chamber health monitoring and diagnostics using virtual model | |
| US12191126B2 (en) | Process control knob estimation | |
| US12235624B2 (en) | Methods and mechanisms for adjusting process chamber parameters during substrate manufacturing | |
| WO2023032637A1 (ja) | 情報処理方法、情報処理装置、及び情報処理システム | |
| US12506024B2 (en) | Method and mechanism for contact-free process chamber characterization | |
| US20230306300A1 (en) | Methods and mechanisms for measuring patterned substrate properties during substrate manufacturing | |
| TW202509692A (zh) | 修改用於新半導體處理設備的機器學習模型的方法和機制 | |
| CN117131952A (zh) | 用于防止机器学习模型性能的波动的方法和机制 | |
| US20260111013A1 (en) | Augmented manufacturing systems with field-provisioned sensors and algorithms | |
| US11892821B2 (en) | Communication node to interface between evaluation systems and a manufacturing system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22864222 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023545410 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280058383.0 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 20247010659 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22864222 Country of ref document: EP Kind code of ref document: A1 |