WO2023013562A1 - 疲労推定システム、疲労推定方法、姿勢推定装置及びプログラム - Google Patents
疲労推定システム、疲労推定方法、姿勢推定装置及びプログラム Download PDFInfo
- Publication number
- WO2023013562A1 WO2023013562A1 PCT/JP2022/029404 JP2022029404W WO2023013562A1 WO 2023013562 A1 WO2023013562 A1 WO 2023013562A1 JP 2022029404 W JP2022029404 W JP 2022029404W WO 2023013562 A1 WO2023013562 A1 WO 2023013562A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- posture
- subject
- fatigue
- estimation
- body part
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/16—Devices for psychotechnics; Testing reaction times ; Devices for evaluating the psychological state
Definitions
- the present disclosure relates to a fatigue estimation system for estimating the degree of fatigue of a subject, a posture estimation device used in the estimation system, a fatigue estimation method, and a program.
- Patent Document 1 discloses a fatigue determination device that determines the presence or absence of fatigue and the type of fatigue based on force measurement and bioelectrical impedance measurement. .
- the present disclosure provides a fatigue estimation system and the like that more appropriately estimate the posture and estimate the degree of fatigue.
- a fatigue estimation system includes a plurality of imaging devices that respectively output images in which different parts of the subject's body part are captured, and the plurality of imaging devices. a posture estimation device for estimating the posture of the subject based on the plurality of images; a fatigue estimation device for estimating and outputting the degree of fatigue of the subject based on the result of estimating the posture of the subject; Prepare.
- a posture estimation device is the posture estimation device described above.
- a fatigue estimation method is a fatigue estimation method executed by a fatigue estimation device, wherein a plurality of and obtaining the images from each of the imaging devices, one image obtained by imaging one body part among the plurality of images, and the one body part and at least one joint among the plurality of images estimating the joint positions of the body parts including the one body part and the other body parts as the posture of the subject, and Based on the result of estimating the posture of the subject, the degree of fatigue of the subject is estimated and output to an output device connected to the fatigue estimation device.
- a program according to one aspect of the present disclosure is a program for causing a computer to execute the fatigue estimation method described above.
- a fatigue estimation system or the like according to one aspect of the present disclosure can more appropriately estimate the posture and estimate the degree of fatigue.
- FIG. 1A is a first diagram for explaining estimation of fatigue level according to the embodiment.
- FIG. 1B is a second diagram for explaining estimation of fatigue level according to the embodiment.
- FIG. 1C is a third diagram for explaining estimation of fatigue level according to the embodiment.
- FIG. 2 is a block diagram showing the functional configuration of the fatigue estimation system according to the embodiment.
- FIG. 3 is a flowchart showing a fatigue level estimation method according to the embodiment.
- 4A is a diagram showing a subject standing still in Posture A.
- FIG. 4B is a diagram showing a subject standing still in Posture B.
- FIG. 5A is a first diagram illustrating accumulation of estimated fatigue level of a subject according to the embodiment.
- FIG. 5B is a second diagram illustrating accumulation of estimated fatigue level of the subject according to the embodiment.
- FIG. 6 is a diagram illustrating an example of synthesizing joint positions according to the embodiment.
- FIG. 7 is a diagram showing a display example of estimation results according to the embodiment.
- each figure is a schematic diagram and is not necessarily strictly illustrated. Moreover, in each figure, the same code
- the posture is estimated by capturing an image of the subject 11 (see FIG. 1A described later) whose fatigue level is to be estimated.
- the degree of fatigue of the subject 11 is estimated from the estimated posture.
- the imaging device 201 see FIG. 1A to be described later
- Obtaining the desired image of the subject 11 may be difficult.
- the fatigue level of the subject 11 cannot be estimated.
- the present disclosure by using a plurality of imaging devices 201 each capable of imaging at least part of the subject 11, in the image of the subject 11 necessary for estimating the posture of the subject 11 Fill in the missing parts.
- This provides the fatigue estimation system 200 that enables estimation of the degree of fatigue of the subject 11 even when the posture of the subject 11 cannot be estimated with one imaging device 201 .
- the load on at least one of the muscles and joints and the deteriorating blood flow are estimated from the estimated posture of the subject 11.
- the posture estimation device used for posture estimation can also be used for estimating muscle load, joint load, and the degree of deterioration of blood flow.
- the posture estimation device according to the present disclosure can be applied as a device for estimating the posture of the subject 11 for various uses. That is, the posture estimation apparatus of the present disclosure can obtain an appropriate posture of the subject 11 even from images captured by the imaging devices 201 arranged such that only a part of the body of the subject 11 is captured by each of the imaging devices 201.
- Information (2D skeletal information, 3D skeletal information, and feature quantities such as the angle between the neck and the spine and the angle between the spine and the lower leg
- FIG. 1A is a first diagram for explaining estimation of fatigue level according to the embodiment.
- FIG. 1B is a second diagram for explaining estimation of fatigue level according to the embodiment.
- FIG. 1C is a third diagram for explaining estimation of fatigue level according to the embodiment.
- the fatigue estimation system 200 in the present disclosure is a system that estimates the degree of fatigue of the subject 11 using an image output by imaging the subject 11 using the imaging device 201 .
- the imaging device 201 is not limited in its form as long as it is a camera that captures the subject 11 and outputs an image, and as shown in FIG. is realized by
- the subject is in a posture of sitting on the chair 12.
- the degree of fatigue of the subject 11 is estimated based on the fatigue accumulated by taking a static posture with a fixed posture among the fatigue of the subject 11 .
- this estimates the fatigue accumulated by the load on at least one of muscles and joints and deteriorating blood flow (hereinafter also referred to as decreased blood flow) due to a fixed posture.
- the subject 11 is in a static posture, sitting, lying down or standing still for at least a certain period of time.
- the fixed period is, for example, a minimum period during which fatigue can be estimated in the fatigue estimation system 200, such as several tens of seconds or several seconds. Such a period is determined depending on the processing capabilities of the imaging device 201 and the fatigue estimation device 100 (see FIG. 2 described later) that configure the fatigue estimation system 200 .
- Examples of subjects 11 who take such a stationary posture include desk workers in offices, drivers who steer moving bodies, people who perform muscle strength training using a load in a stationary posture, residents of facilities such as hospitals, airplanes, and the like. passengers and crew members.
- An image captured and output by the imaging device 201 is processed by the estimating device 100 to estimate the posture of the subject 11 (for example, the joint position 11a) as shown in FIG. 1B.
- the estimated posture of the subject 11 is output as a rigid body link model as an example.
- the straight skeletons are connected by joints indicated by black dots, and the posture of the subject 11 can be reproduced by the positional relationship between the two skeletons connected by one joint.
- the posture is estimated by image recognition, and output as the rigid body link model described above based on the positional relationship between the joints.
- each body part of the muscles that pull the skeletons together and the joints that connect the skeletons so that the positional relationship can be changed.
- the amount of load applied to at least one of the muscles and joints of each body part is calculated as an estimated value. Since the estimated value of the load on at least one of the muscles and joints of each body part is accumulated as the duration of the stationary posture increases, calculation using the estimated value of the load and the duration The degree of fatigue due to the object person 11 maintaining a still posture is calculated by .
- “at least one of muscles and joints" is also expressed as “muscles and/or joints.”
- the degree of fatigue based on the estimated value of the blood flow of the subject 11 in addition to the estimated value of the load applied to the muscles and/or joints.
- an example of estimating the fatigue level of the subject 11 using the estimated values of the load on the muscles and the load on the joints will be mainly described. It is also possible to estimate the degree of fatigue of the subject 11 with higher accuracy.
- the fatigue level of the subject 11 can also be estimated using an estimated value of any one of the amount of load on the muscles of the subject 11, the amount of load on the joints, and the amount of blood flow.
- the estimation of the fatigue level of the subject 11 based on the posture of the subject 11 is not limited to the above example, and any existing technique for estimating the fatigue level can be applied.
- the fatigue estimation system 200 after estimating the posture of the subject 11, the fatigue estimation system 200, based on the duration of the posture, the amount of load on the muscles of the subject 11, the amount of load on the joints, and at least one of blood flow.
- the fatigue estimation system 200 estimates the degree of fatigue of the subject 11 based on the estimated value of at least one of the estimated muscle load, joint load, and blood flow of the subject 11 .
- the estimated value of the load amount may be simply referred to as the load amount or the estimated value.
- the load is replaced with the blood flow, a large load is replaced with a decrease in blood flow, and a small load is replaced with an increase in blood flow.
- the blood flow is information for quantifying the blood flow that deteriorates when the subject 11 maintains the posture.
- the blood flow decreases, it means that the blood flow of the subject 11 is worsening, and can be used as an index of fatigue caused by the deterioration of the blood flow.
- the blood flow may be obtained as an absolute numerical value at the time of measurement, or may be obtained as a relative numerical value between two different time points.
- the degree of deterioration of the blood flow of the subject 11 can be estimated from the posture of the subject 11 and the relative numerical values of the blood flow at two points of time when the posture starts and ends.
- the blood flow rate of the subject can be calculated simply from the posture of the subject 11 and the duration of the posture. can be estimated.
- At least one of the amount of load on the muscles, the amount of load on the joints, and the amount of blood flow is estimated from the posture of the subject 11 using the musculoskeletal model described above.
- a method using actual measurement data can also be applied as a method for estimating the load on muscles, the load on joints, and the blood flow.
- This measured data is a database constructed by accumulating measured values of load on muscles, load on joints, and blood flow, which are measured for each posture, in association with the posture.
- the fatigue estimation system 200 in this case, by inputting the estimated posture of the subject 11 into the database, the measured values of the load on the muscles, the load on the joints, and the blood flow in the corresponding posture are obtained. can be obtained as output.
- the actual measurement data may be constructed using actual measurement values for each individual in consideration of individual differences in the subject 11, and statistical analysis or machine learning is performed for big data obtained from an unspecified number of subjects. It may be qualified and constructed so as to match each subject 11 by analysis processing such as.
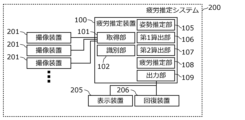
- FIG. 2 is a block diagram showing the functional configuration of the fatigue estimation system according to the embodiment.
- the fatigue estimation system 200 in the present disclosure includes a fatigue estimation device 100, multiple imaging devices 201, a display device 205, and a recovery device 206.
- Estimation device 100 includes acquisition section 101 , identification section 102 , posture estimation section 105 , first calculation section 106 , second calculation section 107 , fatigue estimation section 108 and output section 109 .
- the acquisition unit 101 is a communication module that is connected to each of the plurality of imaging devices 201 and acquires images of the subject 11 captured from each of the plurality of imaging devices 201 .
- the connection between the acquisition unit 101 and the imaging device 201 is performed by wire or wirelessly, and the method of communication performed through the connection is not particularly limited.
- the fatigue estimation device 100 may include, in addition to the imaging device 201 described above, a communication module that is connected to a timer and acquires time from the timer.
- the fatigue estimation device 100 may also include a communication module that is connected to the pressure sensor and acquires the pressure distribution from the pressure sensor.
- the fatigue estimation device 100 may also include a communication module that is connected to the reception device and acquires personal information from the reception device.
- the identification unit 102 is a processing unit realized by executing a predetermined program using a processor and memory.
- the identification unit 102 is installed to realize an identification function for identifying one target person 11 from other persons. Details of the function of the identification unit 102 will be described later.
- the posture estimation unit 105 is a processing unit realized by executing a predetermined program using a processor and memory. By the processing of the posture estimation unit 105, the posture of the subject 11 is estimated based on the image acquired by the acquisition unit 101, the additionally acquired pressure distribution, and the like.
- Posture estimation section 105 is an example of a posture estimation device. That is, the posture estimation apparatus according to the present embodiment is implemented as posture estimation section 105 incorporated in fatigue estimation apparatus 100 .
- the first calculation unit 106 is a processing unit realized by executing a predetermined program using a processor and memory. Based on the estimated posture of the subject 11 and additionally acquired personal information, the load amount applied to each muscle and/or joint is calculated by the processing of the first calculation unit 106 .
- the second calculation unit 107 is a processing unit realized by executing a predetermined program using a processor and memory. By the processing of the second calculation unit 107, the amount of recovery from fatigue in each muscle and/or joint is calculated based on the amount of change in the estimated change in posture of the subject 11. FIG.
- the fatigue estimation unit 108 is a processing unit realized by executing a predetermined program using a processor and memory.
- the fatigue estimating unit 108 uses the posture estimated by the posture estimating unit 105 and the time obtained from a timing device or an internal oscillator to estimate fatigue of the subject 11 based on the duration of the posture. Estimate degrees.
- the output unit 109 is a communication module that is connected to the display device 205 and the recovery device 206 and outputs to the display device 205 and the recovery device 206 the content based on the fatigue level estimation result by the fatigue estimation device 100 .
- the connection between the output unit 109 and the display device 205 or the recovery device 206 is performed by wire or wirelessly, and the method of communication performed through the connection is not particularly limited.
- the output unit 109 has a function of notifying the outside that there is a target person 11 whose degree of fatigue cannot be estimated. also have That is, the output unit 109 outputs the estimation result of the posture estimation unit 105 indicating that estimation of the posture of the subject 11 has failed.
- the output unit 109 outputs the above estimation result as notification information for notifying the existence of the target person 11 whose posture estimation has failed.
- the administrator or the like of the fatigue estimation system 200 can take measures such as estimating the fatigue level of the subject 11 whose posture estimation has failed based on this notification information using another system, or directly listening to the fatigue level. be. In this manner, the output unit 109 is configured in advance so that the fatigue level of the target person 11 whose posture has failed to be estimated will not be missed.
- the imaging device 201 is a device that captures an image of the subject 11 and outputs an image, and is realized by a camera.
- an existing camera such as a security camera or a fixed-point camera may be used in the space where the fatigue estimation system 200 is applied, or a dedicated camera may be newly provided.
- Such an imaging device 201 is an example of an information output device that outputs an image as information about the position of the body part of the subject 11 . Therefore, the information to be output is an image, and is information including the positional relationship of the body parts of the subject 11 projected on the imaging device.
- a clock is a device that measures time, and is realized by a clock.
- the time measured by the timer may be absolute time or relative elapsed time from a starting point.
- the timing device may be realized in any form as long as it can measure the time between two points of time when the target person 11 is detected to be still and the point of time when the degree of fatigue is estimated (that is, the duration of the stationary posture). .
- a pressure sensor is a sensor having a detection surface, and measures the pressure applied to each of the unit detection surfaces that divide the detection surface into one or more.
- the pressure sensor thus measures the pressure for each unit detection surface and outputs the pressure distribution on the detection surface.
- the pressure sensor is provided so that the subject 11 is positioned on the detection surface.
- the pressure sensors are provided on the seat and backrest of the chair on which the subject 11 sits.
- the pressure sensor may have a marker attached on the detection surface, and the subject 11 may be guided onto the detection surface by a display such as "Please sit on the marker.”
- the pressure sensor may output the pressure distribution of the target person 11 on the floor. Since the pressure distribution is used for the purpose of improving the accuracy of estimating the degree of fatigue, the fatigue estimation system 200 may be implemented without the pressure sensor if sufficient accuracy is ensured.
- the reception device is a user interface that receives input of the personal information of the subject 11, and is realized by an input device such as a touch panel or keyboard.
- the personal information includes at least one of age, sex, height, weight, muscle mass, stress level, body fat percentage, and exercise proficiency.
- the age of the target person 11 may be a specific numerical value, or may be an age group divided by 10 years, such as teens, 20s, and 30s.
- the age range may be divided into two divisions based on a predetermined age, such as age and older, or may be other age groups.
- the gender of the subject 11 is one suitable for the subject 11, which is selected from two of male and female.
- the height and weight numerical values of the height and weight of the subject 11 are respectively accepted.
- the muscle mass the muscle composition ratio of the subject 11 measured using a body composition meter or the like is accepted.
- the stress level of the subject 11 is selected by the subject 11 himself/herself from options such as high, medium, and low as the degree of subjective stress felt by the subject 11 .
- the body fat percentage of the subject 11 is the ratio of the body fat weight to the body weight of the subject 11, and is expressed, for example, as a percentage of 100.
- the subject's 11 exercise proficiency may be quantified by a score obtained when the subject 11 executes a predetermined exercise program, or may be the status of the exercise that the subject 11 usually undertakes.
- the former is quantified by, for example, the time required to perform ten spins, the time required to run 50 meters, the flight distance of a long throw, and the like.
- the latter is quantified by, for example, how many days a week you exercise or how many hours you exercise. Since the personal information is used for the purpose of improving the accuracy of estimating the degree of fatigue, the fatigue estimation system 200 may be implemented without the reception device if sufficient accuracy is ensured.
- the display device 205 is a device for displaying the content based on the fatigue level estimation results output by the output unit 109 .
- the display device 205 displays an image showing the content based on the result of estimating the degree of fatigue using a display panel such as a liquid crystal panel or an organic EL (Electro Luminescence) panel.
- a display panel such as a liquid crystal panel or an organic EL (Electro Luminescence) panel.
- the contents displayed by the display device 205 will be described later. Further, if the fatigue estimation system 200 is configured to only reduce the degree of fatigue of the subject 11 using the recovery device 206 for the subject 11, only the recovery device 206 may be provided, and the display device 205 Not required.
- the recovery device 206 is a device that reduces the degree of fatigue of the subject 11 by promoting the subject's 11 blood circulation. Specifically, the recovery device 206 changes the arrangement of each part of the chair 12 by applying voltage, pressurizing, vibrating, heating, or the like, or by a mechanism provided in the chair 12, so that the sitting subject 11 Actively change the posture of As a result, the recovery device 206 changes the load on at least one of the muscles and joints of the subject 11 and promotes blood circulation. From the viewpoint of the blood flow, by promoting the blood circulation in this way, the influence of the deterioration of the blood flow due to the subject 11 being in the still posture is reduced, and the degree of fatigue is recovered.
- the recovery device 206 is pre-applied or contacted to the appropriate body part of the subject 11, depending on the configuration of the device.
- the fatigue estimation system 200 is configured to display only the fatigue level estimation result to the subject 11, the display device 205 only needs to be provided, and the recovery device 206 is not essential.
- FIG. 3 is a flowchart showing a fatigue level estimation method according to the embodiment.
- the fatigue estimation system 200 first acquires the personal information of the subject 11 . Acquisition of personal information is performed by the target person 11 himself or a manager who manages the degree of fatigue of the target person 11 by inputting to the reception device.
- the input personal information of the subject 11 is stored in a storage device or the like (not shown), and is read out and used when estimating the degree of fatigue.
- the fatigue estimation system 200 detects the subject 11 using the imaging device 201 .
- the detection of the target person 11 is performed by counting the persons within the angle of view so that all persons within the angle of view of the camera, which is the imaging device 201 , are the target persons 11 . That is, here, the operation of acquiring the number of people (A) to be detected is performed (S101). Next, among these persons, the number (B) of persons whose postures can be estimated without image processing, that is, with only one image is calculated (S102). Then, the fatigue estimation device 100 determines whether or not A and B match (S103).
- the fatigue estimation apparatus 100 determines that A and B match (Yes in S103), that is, when the postures of all persons to be detected can be estimated from one image, one image is obtained for each person.
- the posture of the subject 11 is estimated from the image (here, the joint positions are estimated) (S108).
- the fatigue estimation unit 108 estimates the fatigue level of the subject 11 (S109).
- Steps S108 and S109 are performed as follows.
- the fatigue estimation system 200 acquires the image output by the imaging device 201 by the acquisition unit 101 .
- the estimation device 100 estimates the posture of the subject 11 .
- the pressure distribution applied to the detection surface is obtained from the pressure sensor.
- the posture estimation unit 105 estimates the posture of the subject 11 based on the acquired image and pressure distribution.
- the pressure distribution is used, for example, when biased pressure is applied, to correct the estimated pose to form that bias.
- the first calculator 106 calculates the amount of load on each muscle and/or joint of the subject 11 from the posture estimation result.
- the personal information obtained in advance is used to correct and calculate the load amount.
- the estimation of the posture of the subject 11 is as described with reference to FIG. 1B, and the calculation of the amount of load is as described with reference to FIG. 1C, so detailed description thereof will be omitted.
- peak values may be based on the subject's 11 gender. Also, if the sex of the subject 11 is male, the amount of load may be small, and if the sex of the subject 11 is female, the amount of load may be large. Alternatively, the smaller the height and weight of the subject 11, the smaller the load, and the larger the height and weight, the larger the load.
- the load amount may be reduced as the composition ratio of the subject 11 has a large muscle mass, and the load amount may be increased as the composition ratio of the muscle mass of the subject 11 is small.
- the duration of the stationary posture of the subject 11 is measured based on the time acquired from the timing device.
- the fatigue estimating unit 108 adds the load amount calculated above each time the duration time passes by the unit time, and estimates the degree of fatigue of the subject 11 at this point. These processes are continued until the target person 11 is released from the stationary state. Specifically, whether or not the stationary state has been canceled is determined based on whether or not the orientation estimated by orientation estimation section 105 has changed from a certain static orientation.
- the fatigue estimation unit 108 estimates the fatigue level of the subject 11 using a fatigue level increasing function having a gradient corresponding to the calculated load amount with respect to the duration. Therefore, the greater the calculated load amount, the greater the degree of fatigue of the subject 11 that increases per unit time.
- the fatigue level of the subject 11 is initialized (set to 0) at the start timing of the stationary posture, which is the starting point.
- the posture estimation unit 105 calculates the amount of change in posture from the original stationary state posture to the current posture.
- the amount of change in posture is calculated for each individual muscle and/or joint, similar to the amount of load described above.
- the posture changes in this way the load on at least one of the muscles and joints changes, and in terms of the blood flow, the blood flow that has deteriorated is temporarily relieved, and the fatigue level of the subject 11 is recovered. turn into The degree of fatigue reduced by recovery is related to the amount of change in posture.
- the second calculation unit 107 calculates a recovery amount, which is the degree of recovery from fatigue, based on the amount of change in posture.
- the change time which is the time during which the change in posture of the subject 11 continues.
- the relationship between the recovery amount and the change time is the same as the relationship between the load amount and the duration time, and the recovery amount of the subject 11 is integrated as long as the posture change continues.
- the fatigue estimating unit 108 estimates the fatigue level of the subject 11 by subtracting the recovery amount each time the subject 11 passes the unit time at the timing when the posture of the subject 11 changes.
- the process of calculating the amount of recovery, measuring the change time, and estimating the degree of fatigue of the subject 11 continues until the posture of the subject 11 is stationary. Specifically, it is determined whether or not the posture estimated by posture estimation section 105 is a static posture. When the target person 11 is not detected to be stationary, the amount of recovery is calculated, the change time is measured, and the amount of recovery is subtracted so that the fatigue level of the target person 11 recovers as long as the change in posture continues. Accumulate.
- the fatigue estimation unit 108 estimates the fatigue level of the subject 11 using a fatigue level decreasing function having a slope corresponding to the calculated recovery amount with respect to the change time. Since the recovery amount of the fatigue level depends on the amount of change in posture, the greater the amount of change in posture, the greater the fatigue level of the subject 11, which decreases per unit time.
- the posture and fatigue level are estimated again for a new static posture.
- the fatigue estimation system 200 since the fatigue level of the subject 11 is calculated in consideration of the duration time in the stationary posture based on the image, the burden on the subject 11 is small, and more accurate The degree of fatigue of the subject 11 can be estimated.
- FIG. 4A is a diagram showing a subject standing still in Posture A.
- FIG. 4B is a diagram showing the subject standing still in posture B. As shown in FIG.
- a subject 11 shown in FIGS. 4A and 4B is in a stationary posture in a seated position on a chair 12, similar to that shown in FIG. 1A.
- FIGS. 4A and 4B there are actually tables, PCs, etc., which are not shown, but only the subject 11 and the chair 12 are shown here.
- the stationary posture of the subject 11 shown in FIG. 4A is posture A in which the load on the shoulders is relatively large.
- the stationary posture of the subject 11 shown in FIG. 4B is posture B in which the load on the shoulders is relatively small.
- FIG. 5A is a first diagram illustrating accumulation of estimated fatigue level of a subject according to the embodiment. Also, FIG. 5B is a second diagram for explaining the accumulation of the subject's fatigue level estimated according to the embodiment.
- posture A is a posture with a larger load than posture B. Therefore, for example, in certain muscles of the subject 11 (here, muscles related to shoulder movement), the load amount of posture A (slope of the straight line of posture A) is greater than the load of posture B (slope of the straight line of posture B). is also big. Therefore, in the posture A, the target person 11 accumulates (accumulates) a larger degree of fatigue in a shorter time than in the case of standing still in the posture B.
- the degree of fatigue of the subject 11 is a positive slope increasing function is estimated as the accumulation (addition) of the degree of fatigue by , and the accumulation (addition) turns to recovery (decrease) at the change point where the subject 11 begins to change the posture.
- the degree of fatigue of the subject 11 is determined by a decreasing function with a negative slope corresponding to the amount of change in posture. It recovers (decreases) by the amount shown as the width of change.
- the fatigue level of the subject 11 is an increasing function with a positive slope corresponding to the load amount of the posture B, and is estimated as accumulation (addition) of the fatigue level. be done.
- the degree of fatigue of the subject 11 is estimated in which accumulation and recovery are reflected depending on whether the posture of the subject 11 is stationary or changed.
- step S103 when the fatigue estimation apparatus 100 determines that A and B do not match (No in S103), that is, one image in the person to be detected If a person whose posture cannot be estimated is included, such a person is identified (S104). Then, the posture estimation unit 105 selects and acquires a plurality of images that can be used for estimating the posture of the specified person (hereinafter referred to as a subject 11 whose fatigue level is estimated through synthesis of joint positions). (S105). Here, if the posture of the subject 11 cannot be estimated even using a plurality of images (No in S106), the process of estimating the degree of fatigue of the subject 11 ends. At this time, for example, notification information, which has been described as a function of the output unit 109, is output.
- FIG. 6 is a diagram illustrating an example of synthesizing joint positions according to the embodiment.
- FIG. 6 shows information generated during estimation of the posture (right end) of the subject 11 based on the acquired images (left end).
- posture estimation section 105 acquires a plurality of images (one image 90a and another image 90b here) in step S105.
- the one image 90a and the other image 90b are images obtained by imaging one body part and another body part, which are part of the body part of the subject 11, respectively.
- one body part and another body part are body parts that share at least one joint with each other. Therefore, when a combination of a plurality of images sharing at least one joint with each other cannot be specified, the result of step S106 is No, and the process ends.
- the posture estimation unit 105 estimates the joint positions of the body parts of the subject 11 that are partially reflected in each of the plurality of images (S107).
- a joint position 11c in one body part reflected in one image 90a is estimated, and first information 90c including this is generated.
- a joint position 11d of another body part reflected in another image 90b is estimated, and second information 90d including this is generated.
- the joint positions 11c of the one body part and the joint positions 11d of the other body parts are combined to estimate the joint positions 11a of the body parts of the subject 11 including the one body part and the other body parts. do.
- the posture estimation unit 105 can estimate the posture of the subject 11 using a plurality of images in which a part of the body part of the subject 11 is captured.
- Synthesis of the joint positions of the subject 11 requires two or more common coordinates between the joint position 11c in at least one body part and the joint position 11d in another body part.
- One of the common coordinates is the joint position of a shared joint, which is one joint shared between one body part and another body part.
- posture estimating section 105 that is, in a situation in which two or more joints are shared between one body part and another body part, the posture estimating unit 105 calculates the distance between these joints from one joint to the other joint.
- the joint position 11c in one body part and the joint position 11d in the other body part are adjusted so that the directions and magnitudes of the vectors extending to the body parts match.
- the posture estimating unit 105 superimposes the joint position 11c of one body part and the joint position 11d of another body part with the shared joint as a reference while the posture (orientation) and scale match. By synthesizing, the joint positions 11a of the body parts of the subject 11 are estimated.
- both one image 90a and another image 90b may be used as the reference coordinates.
- both one image 90a and another image 90b show a commonly moving object marker M.
- the object marker M may be a dedicated object, or some object that exists in space and can be identified as the same object by multiple imaging devices 201 may be used. If the spatial coordinates of the object marker M are used as the reference coordinates, the posture (orientation) and scale can be matched, and the shared joints can be used as a reference to superimpose and combine.
- the posture estimation unit 105 may calculate the spatial coordinates Mc of the object marker M from one image 90a, and the spatial coordinates Md of the object marker M from the other image 90b.
- a line marker L may also be used as another example of the marker.
- the line marker L is realized by attaching a tape or the like to any location in the space.
- the line marker L has both ends in common and is configured to extend between the two ends. The same effect as above can be obtained even if it does not exist.
- the fatigue estimation system 200 can distinguish the target person 11 from other persons staying in the same space as the target person 11 based on the positional relationship between the marker and the target person 11 .
- processing such as superimposing the joint positions for each body part of the subject 11 is performed from a plurality of images. Therefore, when another person (for example, another person 11z in FIG. 6) is staying in the same space as the subject 11, the joint position of one body part of the subject 11 and the other person's other If the joint positions of the body parts are superimposed, the posture of the subject 11 cannot be estimated normally.
- the identification unit 102 is provided to identify the target person 11 and reliably overlap the joint positions of a part of the target person 11 with the joint positions of the other part of the target person 11. can. For this reason, the identification unit 102 detects the relative positions of the subject 11 and the marker (the subject 11 is positioned at a certain distance in a certain direction with respect to the marker) in the image acquired from the imaging device 201 . Recognizing that another person 11z is staying at a position advanced by a different distance in the direction This process may be performed with the spatial resolution of one person, so the process of estimating each joint position It has less processing load than , and can be easily implemented.
- an image showing only a part of the body part of the subject 11 can be used for estimating the degree of fatigue by combining a plurality of images to complement each other. posture can be estimated.
- the body part of the subject 11 when estimating the joint positions of the body parts including a part of the body part of the subject 11 and another part of the body part as the posture of the subject 11, the body part of the subject 11 There are cases where posture estimation cannot be performed for other parts that are not included in a part of and another part. For example, the posture of an invisible part that is not captured in any of the plurality of images, that is, is not captured in any of the images, cannot be estimated by the above processing.
- the posture estimation unit 105 is configured to estimate the joint positions of the body parts of the subject 11 including invisible parts that are not captured in a plurality of images as the posture of the subject 11. good too.
- the posture estimation unit 105 estimates the posture of the subject 11 through processing such as synthesis using a plurality of images in which a part of the body part of the subject 11 is captured. (S108). Then, in step S109, the fatigue estimating unit 108 estimates the degree of fatigue of the subject 11 as described above.
- FIG. 7 is a diagram showing a display example of estimation results according to the embodiment.
- the result of estimating the degree of fatigue of the subject 11 can be displayed using the display device 205 and fed back.
- a display device 205 integrally displays a doll simulating the subject 11 and fatigue levels of the subject 11 in the shoulders, back, and waist.
- the fatigue level of the shoulder is indicated as "stiff shoulder”
- the fatigue of the back is indicated as “back pain”
- the fatigue of the lower back is indicated as "low back pain”.
- the fatigue levels of the subject 11 at three locations are displayed at once, and the fatigue levels at these three locations are estimated from images captured at once. That is, the estimating apparatus 100 detects the muscles and/or joints in each of a plurality of body parts including the first part (eg, shoulder), the second part (eg, back), and the third part (eg, waist) of the subject 11. , the degree of fatigue is estimated from one posture of the subject 11 . Therefore, even if the posture of the subject 11 is constant, the degree of fatigue accumulated in muscles and/or joints differs for each body part. can be estimated.
- the load amount is calculated for each muscle and/or joint of the subject 11. Therefore, if there is no processing resource limitation, each muscle and/or joint fatigue can be estimated. Therefore, there is no limit to the number of body parts whose fatigue levels are estimated from images captured at one time, and the number may be one, two, or four or more.
- the estimating device 100 calculates the load amount for each of a plurality of body parts, and calculates the degree of fatigue (the degree of stiff shoulders) of the first part based on the load amount calculated for the first part in one posture of the subject 11. , the fatigue level of the second part (the above-mentioned back pain level) due to the load amount calculated at the second part, and the fatigue level of the third part (the above-mentioned low back pain level) due to the load amount calculated at the third part, can be estimated.
- the degree of stiff shoulders is estimated from the amount of load on the trapezius muscle
- the degree of back pain is estimated from the degree of fatigue of the latissimus dorsi muscle
- the degree of low back pain is estimated from the amount of load on the lumbar paraspinal muscles.
- one fatigue level may be estimated from the load of one muscle and / or joint, but one fatigue level is estimated from the combined load of a plurality of muscles and / or joints.
- the degree of stiff neck that is, one degree of shoulder fatigue
- the degree of stiff neck may be estimated from the average value of the loads of the trapezius muscle, the levator scapula muscle, the rhomboid muscle, and the deltoid muscle.
- the degree of fatigue estimated in this way may be indicated as a relative position on a reference meter with a minimum value of 0 and a maximum value of 100 as shown.
- a reference value is provided at a predetermined position on the reference meter.
- Such a reference value is set to the relative position (or before and after) of the degree of fatigue at which subjective symptoms such as pain may occur in a general subject 11 quantified in advance by an epidemiological survey or the like. Therefore, different reference values may be set according to the degree of fatigue of each body part.
- the display device 205 may display a warning to the target person 11 as an estimation result when the estimated fatigue level of the target person 11 reaches the reference value.
- the reference value here is an example of the first threshold.
- the display device 205 may display a specific coping method such as "Recommend taking a break" as shown in the drawing.
- the fatigue estimation system 200 actively activates the subject 11. It is also possible to consider a configuration that recovers the degree of fatigue of the user. Specifically, the recovery device 206 shown in FIG. 2 operates to recover the fatigue level of the subject 11 .
- the specific configuration of the recovery device 206 is as described above, so a description thereof will be omitted.
- the reference value here is an example of the third threshold, and may be the same as or different from either the first threshold or the second threshold.
- the fatigue estimation system 200 in the present embodiment includes a plurality of imaging devices 201 each outputting an image in which a different part of the body part of the subject 11 is captured, and a plurality of imaging devices A posture estimation device (posture estimation unit 105) for estimating the posture of the subject 11 based on the plurality of images output in each of the 201, and a fatigue estimating device 100 that estimates and outputs the degree.
- the posture estimation unit 105 cannot obtain an image showing the whole body of the subject 11 in one image due to conditions such as the arrangement position of the imaging device 201.
- the posture of the subject 11 can be appropriately estimated by using a combination of different images. Then, it is possible to more appropriately estimate the fatigue level of the subject 11 based on the posture that is appropriately estimated by the posture estimation unit 105 .
- the posture estimation unit 105 estimates the joint position 11c in one body part based on one image 90a in which one body part is captured among the plurality of images, and , based on another image 90b in which another body part sharing at least one joint with the one body part is imaged, the joint position 11d in the other body part is estimated, and the estimated joint position in the one body part 11 c and the estimated joint positions 11 d of other body parts may be combined to estimate joint positions 11 a of body parts including one body part and other body parts as the posture of the subject 11 .
- the joint position 11a of the body part is estimated using one image 90a in which one body part is imaged and another image 90b in which the other body part is imaged, among the plurality of images. can do.
- a joint position 11c in one body part is estimated from one image 90a
- a joint position 11d in another body part is estimated from another image 90b
- joint positions 11d in another body part are estimated, and these are combined to obtain the one body part and the other body part.
- a shared joint that is shared between one body part and another body part Based on the relative positions of the joints and the reference coordinates shared in the plurality of images, at least one of the relative pose and the relative scale of the joint position 11c in one body part and the joint position 11d in the other body part is determined.
- the shared joint and the reference coordinates are superimposed with at least one of the relative posture and the relative scale between the determined joint position 11c in one body part and the determined joint position 11d in another body part being applied.
- the joint position 11c in one body part is obtained from one image 90a, and the joint position 11d in another body part is obtained from another image 90b.
- the relative posture for example, the amount of rotation to eliminate the difference in relative orientation
- the relative scale for example, A scaling ratio for canceling a relative scale difference
- the reference coordinates may be the joint position of a joint different from the shared joint.
- the joint position of the joints different from the shared joint is used as the reference coordinates and the relative position between the shared joint and the reference coordinates is overlaid, so that the joint position 11c in one image 90a is 11c, And joint positions 11d in other body parts can be synthesized from other images 90b.
- the reference coordinates may be spatial coordinates of a marker placed at a position captured in any of the plurality of images.
- one image 90a can be obtained.
- the joint position 11c in one body part can be synthesized from the image 90b, and the joint position 11d in another body part can be synthesized from the other image 90b.
- an identification unit 102 may be provided that identifies the target person 11 from another person 11z staying in the same space as the target person 11 based on the positional relationship between the marker and the target person 11.
- the target person 11 is identified from other persons 11z staying in the same space as the target person 11, and the posture of only the target person 11 is estimated. be able to. As a result, the fatigue level can be estimated only for the target person 11 even when another person 11z is present.
- the posture estimation unit 105 when the posture estimation unit 105 fails to estimate the posture of the target person 11, the posture estimation unit 105 outputs an estimation result indicating that the estimation of the posture of the target person 11 has failed, and the fatigue estimation system 200 further: An output unit 109 may be provided that outputs notification information for notifying the presence of the target person 11 whose posture estimation has failed, based on the estimation result indicating that the posture estimation of the target person 11 has failed.
- the posture estimating unit 105 estimates the joint positions of the partial body parts of the subject 11 based on a plurality of images, and converts the estimated joint positions of the partial body parts of the subject 11 into human body parts.
- the joint positions of the whole body are input to a learned machine learning model, and the joint positions 11a of the body parts of the subject 11 including invisible parts that are not captured in a plurality of images are estimated as the posture of the subject 11.
- the joint positions 11a can be estimated for the body parts including the invisible parts of the subject 11 that cannot be estimated from any combination of a plurality of images.
- the posture estimation unit 105 further acquires the number of detection target persons in the area, and among the detection target persons, only one image output from one imaging device 201 that captures an image of the area is used. Calculate the number of people whose postures can be estimated, and if the number of people whose postures can be estimated differs from the number of people whose postures can be estimated, among the people who are not postures can be estimated. 11, the posture of the subject 11 may be estimated.
- the posture estimation device is posture estimation section 105 described above.
- an image showing the entire body of the subject 11 cannot be obtained in one image depending on conditions such as the arrangement position of the imaging device 201, and it is difficult to estimate the posture of the subject 11 from one image.
- a combination of different images can be used to better estimate the pose of the subject 11 .
- the fatigue estimation method in the present embodiment is a fatigue estimation method executed by the fatigue estimation apparatus 100, and includes a plurality of images each outputting an image in which a different part of the body part of the subject 11 is captured. , and share one image 90a in which one body part among the plurality of images is captured, and one body part and at least one joint among the plurality of images. and another image 90b in which another body part is imaged, and joint positions 11a of body parts including one body part and another body part are estimated as the posture of the subject 11, and the subject 11 Based on the posture estimation result, the fatigue level of the subject 11 is estimated and output to an output device connected to the fatigue estimation apparatus 100 .
- the program in the present embodiment is a program for causing a computer to execute the fatigue estimation method described above.
- the processing executed by a specific processing unit may be executed by another processing unit.
- the order of multiple processes may be changed, and multiple processes may be executed in parallel.
- the fatigue estimation system or posture estimation device in the present disclosure may be implemented with multiple devices each having a portion of multiple components, or may be implemented with a single device having all of the multiple components. good too. Also, some of the functions of a component may be implemented as functions of another component, and each function may be distributed among the components in any way.
- the present disclosure includes any form having a configuration that includes substantially all of the functions that can realize the fatigue estimation system or the posture estimation device of the present disclosure.
- each component may be realized by executing a software program suitable for each component.
- Each component may be realized by reading and executing a software program recorded in a recording medium such as a hard disk or a semiconductor memory by a program execution unit such as a CPU or processor.
- each component may be realized by hardware.
- each component may be a circuit (or integrated circuit). These circuits may form one circuit as a whole, or may be separate circuits. These circuits may be general-purpose circuits or dedicated circuits.
- the posture of the subject is estimated from the image using the rigid link model generated by image recognition, the load amount is calculated from the estimated posture of the subject, and based on the load amount and the duration time.
- the method of estimating the degree of fatigue is not limited to this. Any existing method may be used as a method of estimating the posture of the subject from the image, and any existing method may be used as a method of estimating the amount of load from the posture of the subject.
- the increasing function and decreasing function are described as linear functions, but the present invention is not limited to this.
- the increasing function may be a curvilinear function as long as the fatigue level increases with time.
- the decreasing function may be a curvilinear function as long as it is a function that decreases the degree of fatigue over time.
- the estimation device described above uses the load on muscles, the load on joints, and the blood flow estimated from the posture of the subject to estimate the degree of fatigue of the subject. As described above, it is also possible to correct the estimated value using the value measured using the measuring device to achieve more accurate estimation of the degree of fatigue. Specifically, the estimating device acquires a measured value corresponding to the estimated value, which is a measured value based on the measurement result of measuring the subject by the measuring device.
- the detection device is, for example, an electromyograph, a muscle hardness meter, a pressure gauge, a near-infrared spectrometer, etc., and obtains measurement values regarding the amount of load on muscles, the amount of load on joints, and the amount of blood flow. can be done.
- an electromyograph can estimate muscle movement corresponding to the potential based on the potential measured by potential measurement.
- a value obtained by estimating the muscle movement can be obtained as a measured value. Since the value obtained by estimating the movement of the muscle can be converted into the amount of load on the muscle, the estimated value of the amount of load on the muscle can be corrected by the measured value.
- the correction here is, for example, taking the average value of the estimated value and the measured value, selecting one of the estimated value and the measured value, and applying the estimated value to the correlation function between the estimated value and the measured value. and so on.
- a muscle hardness meter can estimate muscle hardness from the stress when pressure is applied to the muscle. Since the estimated muscle hardness value can be converted into the amount of load on the muscle, it can be used to correct the estimated value in the same manner as described above.
- the pressure gauge can obtain a measured value of what kind of pressure is applied to the body part of the subject. Such pressure parameters can be input into the musculoskeletal model. By inputting additional parameters such as pressure, the estimation accuracy of the musculoskeletal model is improved, and the estimated value estimated using the musculoskeletal model can be corrected with higher accuracy.
- a near-infrared spectrometer can obtain spectroscopic measurement values of the subject's blood flow.
- the estimated value may be corrected by combining the blood flow rate measured by the infrared spectrometer.
- the measured blood flow may be used when the estimated blood flow has low reliability.
- the fatigue estimation system described in the above embodiment may be used to configure a fatigue factor identification system that identifies the subject's fatigue factors.
- Conventional devices or systems for estimating the degree of fatigue as "degree of stiff shoulder” and “degree of low back pain” use muscles and joints (that is, factors It was difficult to identify the posture that Therefore, by using the fatigue estimation system according to the present disclosure, the above problem can be addressed.
- body parts where fatigue is likely to accumulate are identified as fatigue factor parts in the static posture taken by the subject.
- the fatigue factor identification system may simply identify the fatigue factor part in one static posture taken by the subject, and the estimated amount in the fatigue factor part most among the plurality of static postures taken by the subject You may also identify the fatigue factor posture with many
- a recommended posture that replaces the specified fatigue-causing posture may be presented, and a fatigue degree recovery operation using a recovery device may be performed on the fatigue-causing portion in the fatigue-causing posture.
- the fatigue factor identification system includes the fatigue estimation system described in the above embodiment and a storage device for storing information on the estimated degree of fatigue.
- a storage device may be implemented using, for example, a semiconductor memory or the like, and each main storage unit or the like constituting the fatigue estimation system may be used. good too.
- the present disclosure may be implemented as a fatigue estimation method executed by a fatigue estimation system or an estimation device.
- the present disclosure may be implemented as a program for causing a computer to execute such a fatigue estimation method, or may be implemented as a computer-readable non-temporary recording medium in which such a program is recorded. .
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Hospice & Palliative Care (AREA)
- Pathology (AREA)
- Developmental Disabilities (AREA)
- Psychiatry (AREA)
- Psychology (AREA)
- Social Psychology (AREA)
- Physics & Mathematics (AREA)
- Child & Adolescent Psychology (AREA)
- Biophysics (AREA)
- Educational Technology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023540319A JP7630118B2 (ja) | 2021-08-04 | 2022-07-29 | 疲労推定システム、疲労推定方法、姿勢推定装置及びプログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021128062 | 2021-08-04 | ||
| JP2021-128062 | 2021-08-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023013562A1 true WO2023013562A1 (ja) | 2023-02-09 |
Family
ID=85154746
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/029404 Ceased WO2023013562A1 (ja) | 2021-08-04 | 2022-07-29 | 疲労推定システム、疲労推定方法、姿勢推定装置及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7630118B2 (https=) |
| WO (1) | WO2023013562A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007310707A (ja) * | 2006-05-19 | 2007-11-29 | Toshiba Corp | 姿勢推定装置及びその方法 |
| CN107577451A (zh) * | 2017-08-03 | 2018-01-12 | 中国科学院自动化研究所 | 多Kinect人体骨架坐标变换方法及处理设备、可读存储介质 |
| KR20180094253A (ko) * | 2017-02-15 | 2018-08-23 | 연세대학교 산학협력단 | 사용자 자세 추정 장치 및 방법 |
| US20210104069A1 (en) * | 2019-10-07 | 2021-04-08 | Sony Corporation | Camera calibration method using human joint points |
| WO2021112096A1 (ja) * | 2019-12-06 | 2021-06-10 | パナソニックIpマネジメント株式会社 | 疲労推定システム、推定装置、及び疲労推定方法 |
-
2022
- 2022-07-29 JP JP2023540319A patent/JP7630118B2/ja active Active
- 2022-07-29 WO PCT/JP2022/029404 patent/WO2023013562A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007310707A (ja) * | 2006-05-19 | 2007-11-29 | Toshiba Corp | 姿勢推定装置及びその方法 |
| KR20180094253A (ko) * | 2017-02-15 | 2018-08-23 | 연세대학교 산학협력단 | 사용자 자세 추정 장치 및 방법 |
| CN107577451A (zh) * | 2017-08-03 | 2018-01-12 | 中国科学院自动化研究所 | 多Kinect人体骨架坐标变换方法及处理设备、可读存储介质 |
| US20210104069A1 (en) * | 2019-10-07 | 2021-04-08 | Sony Corporation | Camera calibration method using human joint points |
| WO2021112096A1 (ja) * | 2019-12-06 | 2021-06-10 | パナソニックIpマネジメント株式会社 | 疲労推定システム、推定装置、及び疲労推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023013562A1 (https=) | 2023-02-09 |
| JP7630118B2 (ja) | 2025-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7133779B2 (ja) | 疲労推定システム、推定装置、及び疲労推定方法 | |
| US11182599B2 (en) | Motion state evaluation system, motion state evaluation device, motion state evaluation server, motion state evaluation method, and motion state evaluation program | |
| KR101488130B1 (ko) | 러닝 폼 진단 시스템 및 러닝 폼을 득점화하는 방법 | |
| US20120086793A1 (en) | Video image information processing apparatus and video image information processing method | |
| JP6433805B2 (ja) | 運動機能診断装置及び方法、並びにプログラム | |
| KR102165429B1 (ko) | 체형 분석 방법 및 장치 | |
| CN115004265A (zh) | 信息处理装置以及判断结果输出方法 | |
| JP7298561B2 (ja) | 情報処理システム、情報処理装置、およびプログラム | |
| CN117115922A (zh) | 坐位体前屈评测方法、系统、电子设备和存储介质 | |
| JP7734347B2 (ja) | 姿勢評価装置、個室ブース、及び姿勢評価方法 | |
| WO2023013562A1 (ja) | 疲労推定システム、疲労推定方法、姿勢推定装置及びプログラム | |
| WO2023127203A1 (ja) | 活動量算出装置及び活動量算出方法 | |
| KR102310964B1 (ko) | 근골격계 증상을 진단하기 위한 전자 장치, 방법, 및 시스템 | |
| JP2011220908A (ja) | 床反力計測システム及び方法 | |
| JP7620372B1 (ja) | 運動評価装置、運動評価方法、及び運動評価プログラム | |
| JP7599124B2 (ja) | 疲労推定システム、推定装置、及び疲労推定方法 | |
| JP2025018887A (ja) | 着座したユーザの脚部の姿勢を推定する家具型機器、付属機器及びシステム | |
| WO2023120064A1 (ja) | 疲労推定装置、疲労推定システム、及び疲労推定方法 | |
| JP2024123681A (ja) | 情報処理方法、コンピュータプログラム及び情報処理装置 | |
| WO2022249746A1 (ja) | 身体機能推定システム、身体機能推定方法、及び、プログラム | |
| CN115426951B (zh) | 疲劳推测系统、疲劳推测方法及程序记录介质 | |
| WO2025033200A1 (ja) | 姿勢分析装置、姿勢分析方法、及び、プログラム | |
| US20240359081A1 (en) | Information processing apparatus, method, and non-transitory computer-readable program | |
| KR20210117135A (ko) | 이미지를 이용한 비대면 체력측정 시스템 | |
| US20240206769A1 (en) | Information processing apparatus, information processing method, and non-transitory computer readable medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22852981 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE2 | Request for preliminary examination filed before expiration of 19th month from priority date (pct application filed from 20040101) | ||
| WWE | Wipo information: entry into national phase |
Ref document number: 2023540319 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22852981 Country of ref document: EP Kind code of ref document: A1 |