WO2022269885A1 - 学習データ収集装置、学習データ収集方法、および学習データ収集プログラム - Google Patents
学習データ収集装置、学習データ収集方法、および学習データ収集プログラム Download PDFInfo
- Publication number
- WO2022269885A1 WO2022269885A1 PCT/JP2021/024066 JP2021024066W WO2022269885A1 WO 2022269885 A1 WO2022269885 A1 WO 2022269885A1 JP 2021024066 W JP2021024066 W JP 2021024066W WO 2022269885 A1 WO2022269885 A1 WO 2022269885A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- new data
- new
- existing
- learning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
Definitions
- This disclosure relates to learning data collection technology.
- Patent Literature 1 discloses a learning data collection system for collecting learning data used for image recognition. The system of Patent Document 1 determines whether it is appropriate to use newly captured image data as learning data based on various determination criteria, and if the captured image is not appropriate as learning data, it is determined that it is not appropriate. The determination result is reported to the photographer.
- Patent Document 1 there is a problem that a large amount of new data similar to existing data can be collected as learning data.
- the present disclosure was made to solve such problems, and aims to provide a learning data collection technique that does not collect new data similar to existing data as learning data.
- a learning data collection device acquires new data newly acquired through a sensor and two existing data already stored in a data storage device, and stores the new data or the new data
- a data storage determination unit that determines whether or not to store related data as learning data using the two existing data.
- the learning data collection device According to the learning data collection device according to the embodiment of the present disclosure, it is possible not to collect new data similar to existing data as learning data.
- FIG. 1 is a diagram showing a configuration example of a learning data collection device according to Embodiments 1 and 2;
- FIG. FIG. 4 is a diagram illustrating a hardware configuration example of a data storage determination unit of the learning data collection device;
- FIG. 4 is a diagram illustrating a hardware configuration example of a data storage determination unit of the learning data collection device;
- 4 is a flow chart showing the operation of the learning data collection device according to Embodiment 1;
- 4 is a diagram for explaining the operation of the learning data collection device according to Embodiment 1;
- FIG. 9 is a flow chart showing the operation of the learning data collection device according to Embodiment 2;
- FIG. 12 is a diagram for explaining the operation of the learning data collection device according to Embodiment 2;
- FIG. 12 is a diagram for explaining the operation of the learning data collection device according to Embodiment 2;
- FIG. 13 is a diagram showing a configuration example of a learning data collection device according to Embodiment 3;
- new data similar to existing data means that when new data is represented by linear interpolation of two existing data, new data is represented by linear interpolation of two existing data. is within a predetermined distance from or when the hidden layer output obtained by inputting new data to the neural network is within a predetermined distance from the linear interpolation of the hidden layer output obtained by inputting two existing data to the neural network.
- similar includes not only cases where new data has a fixed relationship with two existing data, but also cases where the new data's hidden layer output has a fixed relationship with two existing data's hidden layer outputs. included in some cases.
- Embodiment 1 A configuration of a learning data collection device according to Embodiment 1 of the present disclosure will be described with reference to FIGS. 1 to 4.
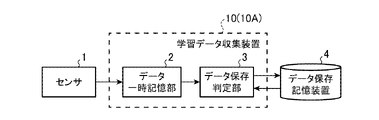
- FIG. 1 the learning data collection device 10 is electrically connected to the sensor 1 and the data storage device 4, and the learning data collection device 10, the sensor 1 and the data storage device 4 are used for learning data collection. configure the system;
- the learning data collection device 10 includes a data temporary storage section 2 and a data storage determination section 3 .
- the data temporary storage unit 2 may be provided outside the learning data collection device 10 .
- the learning data collection device 10 receives data acquired by the sensor 1 from the sensor 1 and exchanges data with the data storage device 4 .
- the sensor 1 is a device that can acquire some data, such as a sensor that acquires data related to physical quantities such as vibration, voltage, current, temperature, or humidity, a camera that acquires images, and a microphone that acquires sound.
- the sensor 1 may be any device as long as the acquired data can be used for AI or machine learning.
- Data acquired by the sensor 1 is converted into digital data by the sensor 1 or an AD converter (not shown) and supplied to the data temporary storage unit 2 .
- the data temporary storage unit 2 is a device for temporarily holding data, and temporarily holds data supplied from the sensor 1 .
- the data temporary storage unit 2 is implemented by a storage device such as a memory, HDD (Hard Disk Drive), or SSD (Solid State Drive).
- the data storage determination unit 3 is a functional unit that determines whether or not to store the data acquired from the data temporary storage unit 2 in the data storage device 4 .
- the hardware configuration of the data save determination unit 3 will be described with reference to FIGS. 2A and 2B.
- the data storage determination unit 3 is implemented by a processing circuit 100a.
- the processing circuit 100a is, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field-Programmable Gate Array), or a combination thereof.
- the data storage determination unit 3 is realized by a CPU (Central Processing Unit) 100b and a memory 100c.
- the function of the data storage determination unit 3 (data storage determination function) is realized by reading out and executing the program stored in the memory 100c by the CPU 100b.
- Programs may be implemented as software, firmware, or a combination of software and firmware.
- Examples of the memory 100c include non-volatile or volatile semiconductors such as RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), and EEPROM (Electrically-EPROM). Memory, magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD are included.
- the data storage storage device 4 is a storage device that stores data.
- the data storage storage device 4 stores the data determined to be stored by the data storage determination unit 3 .
- the data saving memory device 4 supplies data to be used for deciding whether to save data to the data saving determination unit 3 .
- Examples of the data storage device 4 include storage media such as HDDs (Hard Disk Drives), SSDs (Solid State Drives), memories, or memory cards.
- the data storage determination unit 3 uses the new data d held in the data temporary storage unit 2 and the two existing data e1 and e2 stored in the data storage storage device 4 to generate the new data d should be saved.
- data handled by AI or machine learning can be represented by a vector, and in the present disclosure, data is assumed to be an n-dimensional vector represented by two or more dimensions.
- the new data d can be linearly interpolated with the two existing data e1 and e2, it is determined that the new data d is not important and should not be saved. Details of the determination method will be described with reference to FIGS. 3 and 4. FIG. It is assumed that some existing data are stored in the data storage device 4 at the start of the operation of this system.
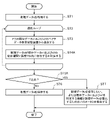
- step ST1 the data storage determination unit 3 acquires from the data temporary storage unit 2 new data d acquired by the sensor 1 and held in the data temporary storage unit 2 as digital data.
- the data storage determination unit 3 repeats the selection loop of step ST2.
- the selection loop of step ST2 two pairs of data e1 and e2 are selected from the set of existing data stored in the data storage device 4.
- FIG. The end condition of the loop is whether the loop has been repeated a preset number of times, or whether the loop has been repeated until all the existing data pairs e1 and e2 have been selected.
- the loop may be terminated immediately after it is determined that linear interpolation is possible. In this case, the calculation time can be reduced by the part that the loop is terminated halfway.
- step ST3 the data storage determination unit 3 selects a pair of existing data e1 and e2. In step ST3, different pairs of e1 and e2 are selected each time, and once selected pairs are not selected repeatedly.
- step ST4 the data storage determination unit 3 calculates whether the new data d can be linearly interpolated with the existing data e1 and e2.
- the new data d When the new data d is linearly interpolable with the existing data e1 and e2, the new data d exists as a point on the line l, while when it is not linearly interpolable, the new data d does not exist on the line l.
- This equation is an n-dimensional linear equation, and it can be easily calculated whether a solution ⁇ exists. For example, it is sufficient to solve each of n linear equations and determine whether or not all of the obtained n solutions ⁇ agree with each other.
- step ST5 the data storage determination unit 3 determines whether it is determined that at least one line-type interpolation is possible for the new data d based on the calculation result in step ST4. If it is not determined even once that the new data d can be linearly interpolated in step ST4 (No in step ST5), the data storage determining unit 3 determines to store the new data d, and stores the new data d as data. It is saved in the save storage device 4 (step ST6).
- step ST4 when it is determined at least once in step ST4 that the new data d can be linearly interpolated (Yes in step ST5), the new data d is considered to be similar to the existing data e1 or e2.
- the data storage determination unit 3 determines not to store the new data d (step ST7).
- the data storage determination unit 3 does not simply determine that the new data d is not to be stored. It may be determined to save the information specifying e2 and the parameters for restoring the new data d as learning data. Both the information specifying the existing data e1 and e2 and the parameters for restoring the new data d are data related to the new data d. Examples of information identifying the existing data e1 and e2 include numbers or codes identifying the existing data e1 and e2. Examples of parameters for reconstructing the new data d include the value of ⁇ used when determining that the new data d can be linearly interpolated with the existing data e1 and e2. The data storage determination unit 3 stores the information and parameters in the data storage device 4 (step ST7).
- new data d similar to existing data e1 or e2 is not acquired as learning data.
- the learning data collection device 10 collects information specifying the existing data e1 and e2 used when it was determined that the new data d can be linearly interpolated, a parameter ⁇ for restoring the new data d, and to save.
- the capacity of a storage device for holding learning data can be reduced.
- AI or machine learning trained on the saved data can acquire its recognition or regression with high accuracy because it selects valid data for learning.
- the smaller the amount of learning data the smaller the calculation time or amount of calculation required for learning AI or machine learning. can do. By reducing the amount of calculation, it is possible to reduce the cost of the equipment that performs learning.
- mixup which is a data augmentation method proposed in the following reference, may be used.
- Mixup is a data augmentation method that uses linear interpolation of arbitrary pairs in learning data as learning data, and can learn to interpolate new data d that is rejected without being saved in this embodiment, and AI Or it can improve the accuracy of machine learning.
- Reference 1 H. Zhang, M. Cisse, Y. N. Dauphin, and D. Lopez-Paz, “mixup: beyond empirical risk minimization,” arXiv:1710.09412, 2017.
- Embodiment 2 the data storage determination unit 3 uses linear interpolation of existing data to determine whether or not to store new data d. Therefore, the effect of reducing the amount of learning data to be saved may be limited. In the present embodiment, less data is stored by relaxing the conditions for determination by the data storage determination unit 3 compared to linear interpolation, thereby further reducing the amount of learning data to be stored.
- the configuration of the learning data collection device 10A according to the second embodiment is the same as that of the learning data collection device 10 of the first embodiment.
- the processing content (determination method) by the data storage determination unit 3 is different from that of the first embodiment.
- the processing contents of the data storage determination unit 3 in the case of the second embodiment will be described with reference to FIG. In FIG. 5, steps ST1, ST2, ST3, ST6 and ST7 are the same as in the first embodiment.
- Embodiment 2 differs from Embodiment 1 in that the processing contents in steps ST4A and ST5A differ from steps ST4 and ST5 in embodiment 1, respectively. These differences are described below.
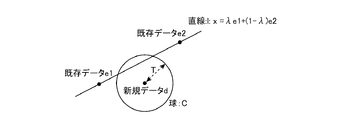
- step ST4A the data storage determination unit 3 calculates whether or not the new data d exists within a distance T from the straight line l indicating linear interpolation of the existing data e1 and e2.
- T is a threshold, which is appropriately set for the data for judging whether or not to save using the learning data collection device 10A. If T is increased, the amount of training data can be reduced more, but if it is increased more than necessary, there is a possibility that important data will be discarded without being saved.
- Determination of whether the straight line l and the sphere C intersect can be realized as follows.
- An n-dimensional sphere C with radius T ( distance T) centered at point d can be expressed as
- the following two-dimensional simultaneous equation x ⁇ e1+(1- ⁇ )e2 with x and ⁇ as variables (1)
- 2 T 2 (2) has a real solution if the sphere C and the line l intersect, and does not have a real solution if they do not intersect.
- Equation (3) becomes an equation for ⁇ that does not include x.
- the following formula (4) is obtained.
- 2 T 2 (4)
- Equation (5) represents the inner product of vectors. Equation (5) is a quadratic equation of ⁇ , and all coefficients are scalar values.
- Whether or not a quadratic equation has a real number solution can be determined by calculating the sign of the discriminant of the quadratic equation. If the discriminant is positive or zero, there is a real solution, and if it is negative, there is no real solution.
- a
- b 2(e1-e2) ⁇ (e2-d) (7)
- c
- the conditions for saving data can be relaxed compared to the first embodiment, and the amount of data to be saved can be reduced.
- mixup which is a data augmentation method proposed in Reference 1, may be used when performing learning later.
- Mixup is a data augmentation method that uses linear interpolation of any pair in the learning data as learning data, and can learn to interpolate the new data d that is rejected without saving in the present embodiment, AI or It can improve the accuracy of machine learning.
- Embodiment 3. ⁇ Configuration>
- the data storage determination unit 3 performed determination using the data d, e1, and e2. It is thought that there are few things that can be represented by linear interpolation of existing data. Moreover, when the conditions are relaxed as in the second embodiment, it is necessary to increase the distance T as the threshold value in order to reduce the amount of stored data, and the possibility of discarding important data increases. end up
- Embodiment 3 instead of using the data d, e1 and e2, the data storage determination unit 3 inputs the data d, e1 and e2 to the trained neural network, and outputs these data to the intermediate layer. A similar determination is made using the value.
- the configuration of a system including the learning data collection device 20 according to Embodiment 3 is shown in FIG.
- the system shown in FIG. 8 is the same as the system shown in FIG. It differs from the system shown in FIG. 1 in that the model 5 is provided.
- the data storage determination unit 3 of the learning data collection device 20 is configured to exchange data with the trained machine learning model 5 .
- the trained machine learning model 5 is a storage device that holds a neural network trained and prepared in advance. This neural network is trained in advance with learning data collected by the learning data collecting device 20 or another means. This neural network is held in a state in which inference operations are possible, and the trained machine learning model 5 supplies the neural network for the data storage determination unit 3 .
- the data storage determination unit 3 inputs the new data d and the existing data e1 and e2 to the neural network provided from the trained machine learning model 5, and learns the respective intermediate layer outputs d', e'1 and e'2. obtained from the machine learning model 5.
- the data storage determination unit 3 uses the intermediate layer outputs d′, e′1 and e′2 instead of the data d, e1 and e2 to obtain the data shown in FIG. 3 of the first embodiment or FIG. 5 of the second embodiment. It is determined whether to save the new data d or data related to the new data d according to the determination method of .
- the data storage determination unit 3 determines that the intermediate layer output d′ is represented by linear interpolation of the intermediate layer outputs e′1 and e′2. Calculate if If the intermediate layer output d' is not represented by linear interpolation of the intermediate layer outputs e'1 and e'2, the data storage determination unit 3, in the step corresponding to step ST6 in FIG. may be determined to be stored, or instead of determining to store the new data d, it may be determined to store the intermediate layer output d', which is data related to the new data d.
- the data storage determination unit 3 determines that the new data d should be stored in the step corresponding to step ST7 in FIG. You can judge. Further, in a step corresponding to step ST7 in FIG. may be determined to be stored.
- the data storage determination unit 3 determines that the intermediate layer output d' is linearly interpolated between the intermediate layer outputs e'1 and e'2. Calculate if it exists within the distance T. If the intermediate layer output d' does not exist within the distance T from the linear interpolation of the intermediate layer outputs e'1 and e'2, the data storage determination unit 3 performs the same operation as in step ST6 in the step corresponding to step ST6 in FIG. Alternatively, it may be determined to store the intermediate layer output d', which is data related to the new data d, instead of storing the new data d.
- the data storage determination unit 3 stores the new data d in the step corresponding to step ST7 in FIG. It may be determined not to save.
- the data storage determination unit 3 stores information specifying the existing data e1 and e2, which are data related to the new data d, and parameters for restoring the new data d. may be determined to be stored.
- the number of dimensions of d', e'1 and e'2 obtained in the hidden layer output can be made smaller than the number of dimensions of data d, e1 and e2, and the new data can be
- the possibility that existing data can be represented by linear interpolation or the possibility that new data exists within the distance T increases, and the amount of learning data to be stored can be reduced compared to the first and second embodiments.
- the intermediate layer output d' which is data related to the new data
- the number of dimensions of the data to be saved can be suppressed, and the amount of data to be saved can be reduced. be able to.
- the intermediate layer output of the neural network is a value in which the feature amount of the input data is appropriately extracted, and it is possible to determine whether the data should be saved more appropriately.
- the accuracy of AI or machine learning learned with the learning data obtained in the present embodiment can be improved.
- mixup which is a data augmentation method proposed in Reference 1, may be used when performing learning later.
- Mixup is a data augmentation method that uses linear interpolation of any pair in the learning data as learning data, and can learn to interpolate the new data d that is rejected without saving in the present embodiment, AI or It can improve the accuracy of machine learning.
- the learning data collection technology of the present disclosure can be used as a device for collecting learning data for use in AI or machine learning.
- 1 sensor 1 sensor, 2 data temporary storage unit, 3 data storage determination unit, 4 data storage storage device, 5 learned machine learning model, 10 learning data collection device, 10A learning data collection device, 20 learning data collection device, 100a processing circuit, 100b CPU, 100c memory.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
- Complex Calculations (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023529390A JP7415082B2 (ja) | 2021-06-25 | 2021-06-25 | 学習データ収集装置、学習データ収集方法、および学習データ収集プログラム |
| PCT/JP2021/024066 WO2022269885A1 (ja) | 2021-06-25 | 2021-06-25 | 学習データ収集装置、学習データ収集方法、および学習データ収集プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/024066 WO2022269885A1 (ja) | 2021-06-25 | 2021-06-25 | 学習データ収集装置、学習データ収集方法、および学習データ収集プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022269885A1 true WO2022269885A1 (ja) | 2022-12-29 |
Family
ID=84544440
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/024066 Ceased WO2022269885A1 (ja) | 2021-06-25 | 2021-06-25 | 学習データ収集装置、学習データ収集方法、および学習データ収集プログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7415082B2 (https=) |
| WO (1) | WO2022269885A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025109662A1 (ja) * | 2023-11-20 | 2025-05-30 | 日本電信電話株式会社 | 強化学習装置、強化学習方法、及び強化学習プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0738745A (ja) * | 1993-06-25 | 1995-02-07 | Sharp Corp | ニューラルネットワークにより画質を設定する画像形成装置 |
| JPH08329196A (ja) * | 1995-05-31 | 1996-12-13 | Sanyo Electric Co Ltd | 文字認識装置およびその学習方法 |
| JP2020166397A (ja) * | 2019-03-28 | 2020-10-08 | パナソニックIpマネジメント株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP2021096511A (ja) * | 2019-12-13 | 2021-06-24 | 富士通株式会社 | 学習データ生成方法、学習データ生成プログラムおよび情報処理装置 |
-
2021
- 2021-06-25 WO PCT/JP2021/024066 patent/WO2022269885A1/ja not_active Ceased
- 2021-06-25 JP JP2023529390A patent/JP7415082B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0738745A (ja) * | 1993-06-25 | 1995-02-07 | Sharp Corp | ニューラルネットワークにより画質を設定する画像形成装置 |
| JPH08329196A (ja) * | 1995-05-31 | 1996-12-13 | Sanyo Electric Co Ltd | 文字認識装置およびその学習方法 |
| JP2020166397A (ja) * | 2019-03-28 | 2020-10-08 | パナソニックIpマネジメント株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP2021096511A (ja) * | 2019-12-13 | 2021-06-24 | 富士通株式会社 | 学習データ生成方法、学習データ生成プログラムおよび情報処理装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025109662A1 (ja) * | 2023-11-20 | 2025-05-30 | 日本電信電話株式会社 | 強化学習装置、強化学習方法、及び強化学習プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022269885A1 (https=) | 2022-12-29 |
| JP7415082B2 (ja) | 2024-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111899163B (zh) | 生成对抗网络中单图像超分辨率的有效结构保持 | |
| CN111882026B (zh) | 通过潜在空间正则化对无监督式生成对抗网络进行优化 | |
| CN107545889B (zh) | 适用于模式识别的模型的优化方法、装置及终端设备 | |
| CN110210513B (zh) | 数据分类方法、装置及终端设备 | |
| CN110383299B (zh) | 记忆增强的生成时间模型 | |
| JP6943291B2 (ja) | 学習装置、学習方法、及び、プログラム | |
| CN113348472B (zh) | 具有软内核选择的卷积神经网络 | |
| CN110765860A (zh) | 摔倒判定方法、装置、计算机设备及存储介质 | |
| CN112001488A (zh) | 训练生成型对抗性网络 | |
| Li et al. | MapReduce-based fast fuzzy c-means algorithm for large-scale underwater image segmentation | |
| CN111582105A (zh) | 基于局部全局双向推理的无监督点云特征学习方法及装置 | |
| CN111524118A (zh) | 变压器的运行状态检测方法、装置、计算机设备和存储介质 | |
| CN111259919A (zh) | 一种视频分类方法、装置及设备、存储介质 | |
| Spera et al. | Egocentric shopping cart localization | |
| US20220108153A1 (en) | Bayesian context aggregation for neural processes | |
| Qin et al. | Evolving domain generalization via latent structure-aware sequential autoencoder | |
| WO2022269885A1 (ja) | 学習データ収集装置、学習データ収集方法、および学習データ収集プログラム | |
| CN117671371A (zh) | 一种基于代理注意力的视觉任务处理方法和系统 | |
| CN120122829B (zh) | 智能体的触觉感知数据处理方法、装置、设备及介质 | |
| CN118664607B (zh) | 一种上肢康复机器人运动轨迹预测方法及系统 | |
| Liu et al. | Lidarnas: Unifying and searching neural architectures for 3d point clouds | |
| US12045153B1 (en) | Apparatus and method of hot-swapping a component of a component unit in a cluster | |
| CN114529461B (zh) | 深度学习单图像去反射方法、装置、电子设备和存储介质 | |
| CN114550288B (zh) | 基于事件数据的动作识别方法及装置 | |
| EP4446944A1 (en) | Efficient active learning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21947170 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023529390 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21947170 Country of ref document: EP Kind code of ref document: A1 |