WO2022170927A1 - 一种手术显微镜诊疗系统 - Google Patents
一种手术显微镜诊疗系统 Download PDFInfo
- Publication number
- WO2022170927A1 WO2022170927A1 PCT/CN2022/072540 CN2022072540W WO2022170927A1 WO 2022170927 A1 WO2022170927 A1 WO 2022170927A1 CN 2022072540 W CN2022072540 W CN 2022072540W WO 2022170927 A1 WO2022170927 A1 WO 2022170927A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- module
- image
- data
- microscope
- microscopic observation
- Prior art date
Links
- 238000003745 diagnosis Methods 0.000 title claims abstract description 45
- 230000003287 optical effect Effects 0.000 claims abstract description 59
- 238000002347 injection Methods 0.000 claims abstract description 29
- 239000007924 injection Substances 0.000 claims abstract description 29
- 238000003384 imaging method Methods 0.000 claims description 62
- 230000005855 radiation Effects 0.000 claims description 23
- 238000001514 detection method Methods 0.000 claims description 22
- 238000012545 processing Methods 0.000 claims description 16
- 238000004458 analytical method Methods 0.000 claims description 15
- 230000003239 periodontal effect Effects 0.000 claims description 10
- 230000003902 lesion Effects 0.000 claims description 9
- 239000000523 sample Substances 0.000 claims description 9
- 230000008921 facial expression Effects 0.000 claims description 7
- 238000011897 real-time detection Methods 0.000 claims 1
- 238000001356 surgical procedure Methods 0.000 abstract description 3
- 210000004262 dental pulp cavity Anatomy 0.000 description 37
- 238000007408 cone-beam computed tomography Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 10
- 210000001519 tissue Anatomy 0.000 description 9
- 238000000034 method Methods 0.000 description 6
- 210000005036 nerve Anatomy 0.000 description 4
- 210000004268 dentin Anatomy 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 238000002360 preparation method Methods 0.000 description 3
- 239000000243 solution Substances 0.000 description 3
- 208000005888 Periodontal Pocket Diseases 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 230000036772 blood pressure Effects 0.000 description 2
- 230000002308 calcification Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 208000015181 infectious disease Diseases 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 208000028169 periodontal disease Diseases 0.000 description 2
- QNRATNLHPGXHMA-XZHTYLCXSA-N (r)-(6-ethoxyquinolin-4-yl)-[(2s,4s,5r)-5-ethyl-1-azabicyclo[2.2.2]octan-2-yl]methanol;hydrochloride Chemical compound Cl.C([C@H]([C@H](C1)CC)C2)CN1[C@@H]2[C@H](O)C1=CC=NC2=CC=C(OCC)C=C21 QNRATNLHPGXHMA-XZHTYLCXSA-N 0.000 description 1
- 201000011180 Dental Pulp Calcification Diseases 0.000 description 1
- 206010018276 Gingival bleeding Diseases 0.000 description 1
- 208000003445 Mouth Neoplasms Diseases 0.000 description 1
- 208000033809 Suppuration Diseases 0.000 description 1
- 208000009596 Tooth Mobility Diseases 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 238000002266 amputation Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 208000002925 dental caries Diseases 0.000 description 1
- 210000003074 dental pulp Anatomy 0.000 description 1
- 208000007147 dental pulp necrosis Diseases 0.000 description 1
- 210000004513 dentition Anatomy 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000002845 discoloration Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000004043 dyeing Methods 0.000 description 1
- 238000001917 fluorescence detection Methods 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 208000012987 lip and oral cavity carcinoma Diseases 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- 210000000214 mouth Anatomy 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 210000004126 nerve fiber Anatomy 0.000 description 1
- 235000015097 nutrients Nutrition 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 210000004053 periapical tissue Anatomy 0.000 description 1
- 230000008832 photodamage Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000001114 tooth apex Anatomy 0.000 description 1
- 230000036346 tooth eruption Effects 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C19/00—Dental auxiliary appliances
- A61C19/06—Implements for therapeutic treatment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/20—Surgical microscopes characterised by non-optical aspects
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C1/00—Dental machines for boring or cutting ; General features of dental machines or apparatus, e.g. hand-piece design
- A61C1/08—Machine parts specially adapted for dentistry
- A61C1/082—Positioning or guiding, e.g. of drills
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
- G02B21/08—Condensers
- G02B21/082—Condensers for incident illumination only
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
Definitions
- the invention relates to the technical field of dental diagnosis and treatment, in particular to an operating microscope diagnosis and treatment system.
- the operating microscope can be used for pulp and root canal inspection and treatment. It can clearly observe the position of the root canal orifice, the shape of the inner wall of the root canal, and the removal of pulp in the root canal, perform root canal preparation, filling, and take out the root canal Internal fracture instruments and periapical surgery. With sufficient illumination and clear magnification observation, the popularity of oral surgical microscopes has changed the traditional extensive operation based on experience and touch, root canal treatment, removal of metal blockages in root canals, root canal steps, root apex deviation, The success rate of treatment of medullary canal perforation has been greatly improved.
- the cavity in the middle of the tooth contains soft tissue called the pulp.
- the upper part of the cavity is wide, called the pulp cavity, and the lower part has a tubular root canal, which leads to the blood vessels of the tooth nerve and the nutrient nerve. Infection of the dental pulp can cause pain, infection of the jawbone, and eventually weaken the tooth due to the death of the dental nerve.
- root canal treatment the doctor needs to completely open the pulp cavity, find and treat all the root canals.
- Humans generally have 1-4 root canals per tooth, with the most root canals in the posterior teeth. Multiple root canal teeth are often difficult to find due to ageing changes or the deposition of reparative dentin, or pulp stone, or pulp cavity calcification, or root canal morphological variation, etc.
- Stereoscopic anatomy understand and see the anatomy of the pulp cavity from all directions and positions; and use the X-ray films taken by various angle projection methods to understand and indicate the number, shape, position and direction of the root and root canal and curvature; root-to-crown relationship; possible variations in root and root canal anatomy.
- the root canal needs to be estimated.
- the essential collar is used to expose the position of the root canal orifice, that is, if there is calcification of the root canal orifice, it is even more necessary for the doctor to repeatedly test the possible positions, which will inevitably remove too much healthy tooth tissue.
- preoperative dental films are often used to help doctors judge and determine the number and shape of root canals.
- doctors need to devote part of their energy to memorizing the shape of root crowns, and even suspend the operation to look at the dental films.
- the dental film is only a two-dimensional plane image, it cannot accurately reflect the three-dimensional shape of the root canal.
- many root canals have multiple bends in the direction, which cannot be accurately positioned by the dental film.
- the present application proposes an operating microscope diagnosis and treatment system, and the specific scheme is as follows:
- An operating microscope diagnosis and treatment system comprising a microscopic observation module, a storage module and an enhanced information image injection module, the microscopic observation module is used to observe a target object to be observed; the storage module stores the radiation imaging of the target object A three-dimensional digital image of the structure; the enhanced information image injection module is used to project the digital image of the radiation imaging three-dimensional structure in the form of an optical image into the observation field of the microscopic observation module, and is used in the observation field of the microscopic observation module.
- the microscopic optical images are superimposed to form a superimposed optical image.
- the digital image switch of the radiation imaging three-dimensional structure is controllable, and the operator can choose to view the layered two-dimensional image or the 3D image of the target object as required.
- the 3D imaging module is used to collect in real time the optical image under the microscope in the field of view observed by the microscopic observation module, and convert the optical image under the microscope into a three-dimensional digital image.
- the image recognition processing module is used to identify the biological features in the three-dimensional digital image, and through the biometric comparison, the radiation imaging three-dimensional structure digital image that matches the three-dimensional digital image is sent to the enhanced information image
- the injection module is then projected to set an area in the observation field of the microscopic observation module.
- the microscopic observation module is provided with a large zoom objective lens and a magnification system, and the detection module is used to detect the focus position of the large zoom objective lens and the zoom system respectively.
- the image recognition processing module determines the depth position of the radiation imaging three-dimensional structure digital image according to the focus position of the zoom large objective lens detected by the detection module, and the image recognition processing module determines the depth position of the digital image of the radiation imaging three-dimensional structure according to the detection module.
- the detected magnification of the zoom system determines the depth range in which the radiographic three-dimensional structure digital image displays the current layer region.
- the digital image of the radiation imaging three-dimensional structure is projected on the edge position of the observation field of the microscopic observation module, or the digital image of the radiation imaging three-dimensional structure is overlapped with the optical image under the microscope in the observation field of the microscopic observation module. It is shown that the transparency of the digital image of the radiographic three-dimensional structure can be adjusted.
- the positioning and navigation detection module is used to detect the depth and spatial position data of the surgical instrument in real time
- the image recognition processing module Compare the depth and spatial position data collected by the positioning navigation detection module with the biological features in the three-dimensional digital image to obtain real-time relative position data between the surgical instrument and the target object, and compare the obtained real-time relative position
- the data is sent to the enhanced information image injection module, and then projected on the set position of the observation field of the microscopic observation module.
- the depth and spatial position data of the surgical instrument and the status data of the surgical instrument are stored in the storage module in real time, and the status data of the surgical instrument can be sent to the enhanced information image injection module, Afterwards, it is projected on the set position of the observation field of the microscopic observation module.
- the storage module also stores patient information data, root tester data, oral scanner data, electronic periodontal probe data and pulp vitality data.
- the required data is projected on the set position of the observation field of the microscopic observation module through the enhanced information image injection module.
- each data is projected on the set position of the observation field of view of the microscopic observation module in the form of a text symbol, a data table, a two-dimensional curve or a three-dimensional topographic map, and each data is divided into the observation field of view of the microscopic observation module.
- the display transparency of each data and the size and position of the display window of each data can be adjusted.
- the switch of the AI-assisted analysis module is controllable, the operator can choose to turn on or off the AI-assisted function according to needs, and the AI-assisted analysis module is used for the 3D imaging module.
- the three-dimensional digital image is analyzed to identify the lesion condition of the target object, and mark or remind the target object according to the lesion condition.
- the enhanced information image injection module is projected on the set position of the observation field of the microscopic observation module.
- the camera module is used to collect the facial expression image data of the patient
- the AI assisted analysis module analyzes the facial expression image data collected by the camera module, judges the comfort of the patient, and passes all the facial expressions.
- the enhanced information image injection module projects real-time projection on the set position of the observation field of the microscopic observation module.
- the microscopic observation module includes a surgical microscope
- the enhanced information image injection module includes a projection device
- the projection device can project additional information beams, and the additional information beams are connected to one or two channels in the surgical microscope.
- the incident light beams are superimposed and then injected into the binocular lens barrel of the operating microscope to form a superimposed optical image.
- the projection device includes a projection display component and an imaging lens group, the projection display component can project an additional optical image, and the additional optical image is converted into a parallel light beam through the imaging lens group to form the additional information beam .
- the surgical microscope diagnosis and treatment system of the present application has one or more of the following beneficial effects:
- the digital image switch of the three-dimensional structure of radiation imaging is controllable, and the operator can call up and view the 3D structure of the target object at any time according to needs, and can choose to view the specific layered images to determine the microscope.
- the internal structure of the organization
- the surgical microscope diagnosis and treatment system of the present application is provided with an image recognition processing module, which can automatically compare and register the three-dimensional digital image of the radiation imaging three-dimensional structure with the three-dimensional digital image of the optical image under the microscope through biological feature judgment;
- the digital image of the three-dimensional structure of radiation imaging can be displayed superimposed on the optical image under the microscope, and a positioning and navigation detection device is installed in the surgical instrument to guide the surgical operation accurately and in place, which is convenient for the operator to confirm the operation in time. ,Improve efficiency;
- the surgical microscope diagnosis and treatment system of the present application which can display patient information, root tester data, oral scanner data, electronic periodontal probe data, pulp vitality data, etc. at the set position of the observation field of view of the microscopic observation module data, which is convenient to provide reference for operators;
- the surgical microscope diagnosis and treatment system of the present application is provided with an AI auxiliary module to realize AI-assisted diagnosis and display.
- FIG. 1 is a schematic structural diagram of an operating microscope provided in Embodiment 1 of the application;
- FIG. 2 is a schematic diagram of the superposition of optical paths of the operating microscope provided in Embodiment 1 of the present application;
- FIG. 3 is a schematic diagram of the superposition of optical paths of the operating microscope provided in Embodiment 2 of the present application;
- FIG. 4 is a schematic diagram of superposition of optical paths of the operating microscope provided in Embodiment 3 of the present application.
- FIG. 5 is a schematic diagram of the superposition of optical paths of the operating microscope provided in Embodiment 4 of the present application.
- FIG. 6 is a schematic diagram of the superposition of optical paths of the operating microscope provided in Embodiment 5 of the present application;
- FIG. 7 is a schematic diagram of superposition of optical paths of the operating microscope provided in Embodiment 6 of the present application.
- FIG. 8 is a schematic diagram of the superposition of optical paths of the operating microscope provided in Embodiment 7 of the present application.
- FIG. 9 is a schematic diagram of superposition of optical paths of the operating microscope provided in Embodiment 8 of the present application.
- Fig. 10 is the effect diagram after the optical path of the operating microscope provided by the ninth embodiment of the application is superimposed;
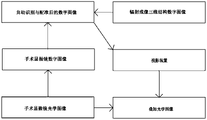
- FIG. 11 is a flowchart of the operating microscope diagnosis and treatment system provided in Embodiment 9 of the application.
- FIG. 15 is a flowchart of the operating microscope diagnosis and treatment system provided in the thirteenth embodiment of the present application.
- the present application provides an operating microscope, which includes a microscope body 1 , a variable magnification lens group 2 and a superimposed lens group 3 built in the microscope lens body 1 , and a large objective lens group 4 connected to the microscope lens body 1 . , binocular tube 5 and projection device 6, as shown in Figure 1.
- the operating microscope is a double-light design, and the variable magnification lens group 2 includes a first variable magnification lens group and a second variable magnification lens group.
- the first incident light beam 91 passes through the large objective lens group 4 and the first variable magnification lens group and enters the binocular tube 5 in sequence, and the second incident light beam 92 passes through the large objective lens group 4 and the second incident light beam in sequence.
- the variable magnification lens group is injected into the binocular tube 5, and the projection device 6 projects an additional information beam 94.
- the additional information beam 94 passes through the stacking mirror group 3 and the first incident beam 91 and/or Or the second incident light beams are superimposed and then injected into the binocular lens barrel 5 .
- the projection device 6 includes a projection display component 61 and an imaging mirror group 62, the projection display component 61 can project an additional optical image 93, and the additional optical image 93 is converted into a parallel light beam through the imaging mirror group 62 to form the The additional information beam 94 is described.
- the projection display part 61 is preferably a micro projector.
- the projection device in this embodiment is installed on the rear side of the microscope body 1 , as shown in FIG. It is installed between the operating microscope body 1 and the binocular tube 5 as an accessory.
- the stacking mirror group 3 includes a first longitudinal beam splitter prism 301 .
- the projection display part 61 is incident on the additional optical image 93 from the rear side of the microscope body 1 .
- a turning mirror group 63 can be added to the imaging mirror group 62 as required,
- the additional optical image 93 projected by the projection display component 61 can be directly incident into the first longitudinal beam splitting prism 301 after being converted by the imaging lens group 62 to form an additional information beam 94 .
- the turning mirror group 63 used in the figure is two right-angle prisms.
- the two direct prisms can also be replaced by rhombic prisms, plane mirrors, etc.
- the additional information light beam 94 is superimposed with the first incident light beam 91 through the first longitudinal beam splitter prism 301 to form a first superimposed light beam 95 , and then the first superimposed light beam 95 is imaged through the binocular tube 5 , Through the eyepiece, the operator can observe a realistic optical image under the microscope superimposed with additional information.
- a first transverse beam splitter prism 302 is added to the optical path of the second incident beam 92 in the stacking mirror group 3 .
- the imaging device 7 is such as a camera, a video camera, a mobile phone, an assistant mirror, and the like.
- a second transverse beam splitter prism 303 is added between the imaging mirror group 62 and the first longitudinal beam splitter prism 301 in the superimposing mirror group 3 , and the light beam 92 passes through the second path is added.
- a second longitudinal beam splitter prism 305 is added on the way, and a first reflector 304 is added to the second transverse beam splitter prism 303 and the second longitudinal beam splitter prism 305 .
- the additional information beam 94 is laterally split through the second transverse beam splitting prism 303, and a part of the additional information beam 94 continues to enter the first longitudinal beam splitting prism 301 and the first beam along the original optical path.
- the incident light beam 91 is superimposed to form a first superimposed light beam 95 , and another part of the additional information light beam 94 is refracted by 90° and then reflected by the first reflecting mirror 304 , and then enters the second longitudinal beam splitter prism 305 and the second incident beam 92
- the second superimposed light beam 96 is formed by superposition, and then the first superimposed light beam 95 and the second superimposed light beam 96 are imaged through the binocular tube 5 and observed through the eyepiece.
- the light beams incident on the binocular lens barrel 5 are all superimposed light beams.
- lateral beam channels are respectively added to the positions of the microscope lens body 1 corresponding to the first longitudinal beam splitting prism 301 and the second longitudinal beam splitting prism 305 .
- the first superimposed light beam 95 is laterally split through the first longitudinal beam splitting prism 301 , a part of the first superimposed light beam 95 enters the binocular tube 5 , and the other part of the first superimposed light beam 95 passes through
- the corresponding side beam channel is emitted
- the second superimposed beam 96 is laterally split through the second longitudinal beam splitting prism 305, a part of the second superimposed beam 96 is injected into the binocular tube 5, and the other part of the second superimposed beam
- the beams 96 are emitted through the corresponding lateral beam channels, and the first superimposed beams 95 and the second superimposed beams 96 emitted from the lateral beam channels can be captured by the imaging device 7 to provide the imaging device 7 with images.
- the imaging device 7 is such as a camera,
- the projection device is installed on the left or right side of the microscope body 1 .
- the projection display unit 61 emits an additional optical image 93 from the left or right direction of the microscope body 1 .
- the stacking mirror group 3 includes a third longitudinal beam splitter prism 306 , and the third longitudinal beam splitter prism 306 can be driven in the microscope body 1 along the left and right directions of the microscope body 1 Pan.
- the additional information light beam 94 is superimposed with the first incident light beam 91 or the second incident light beam 92 through the third longitudinal beam splitter prism 306 to form a third superimposed light beam 97, and then the third superimposed light beam 97 passes through the Binocular tube 5 imaging.
- the third longitudinal beam splitting prism 306 can be designed to be translated, so that the additional optical image 93 can be superimposed on any path of the operating microscope.
- a lateral beam channel is added to the position of the microscope body 1 corresponding to the third longitudinal beam splitter prism 306 .
- the third superimposed light beam 97 is laterally split through the third longitudinal beam splitting prism 306 , a part of the third superimposed light beam 97 enters the binocular tube 5 , and the other part of the third superimposed light beam 97 passes through
- the corresponding side beam channel is emitted, and the third superimposed beam 97 emitted from the side beam channel can be collected by the imaging device 7 to provide the imaging device 7 with an image.
- the imaging device 7 is such as a camera, a video camera, a mobile phone, an assistant mirror, and the like.
- the image obtained by the imaging device 7 at this time is a superimposed image.
- the projection device is installed on the lower side or inside of the microscope body 1 .
- the stacking mirror group 3 includes a second reflecting mirror 307 , a third reflecting mirror 308 , a fourth longitudinal beam splitting prism 309 and a third lateral beam splitting prism 310 .
- the additional information beam 94 is reflected by the second reflecting mirror 307 and enters the fourth longitudinal beam splitter prism 309 from the rear side of the microscope body 1 , and the additional information beam 94 passes through
- the fourth longitudinal beam splitting prism 309 is superimposed with the first incident beam 91 to form a fourth superimposed beam 98 , and then the fourth superimposed beam 98 is imaged through the binocular tube 5 , and the second incident beam 98 is formed.
- the beam After passing through the second variable magnification lens group, the beam is split laterally by the third transverse beam splitting prism 310, and a part of the second incident beam 92 continues to enter the binocular tube 5 along the original optical path, and the other part of the second beam
- the second incident light beam 92 is reflected downward by the third reflector 308 and emitted downward, and part of the second incident light beam 92 emitted downward can be collected by the imaging device 7 to provide the imaging device 7 with an image.
- a fourth transverse beam splitter prism 311 is added between the second reflection mirror 307 and the fourth longitudinal beam splitter prism 309 in the superimposing mirror group 3, and the third transverse beam splitter
- a fifth transverse beam splitter prism 312 is added between the prism 310 , the third reflector 308 and the fourth transverse beam splitter prism 311 .
- the additional information beam 94 reflected by the second reflecting mirror 307 is laterally split by the fourth transverse beam splitting prism 311, and a part of the additional information beam 94 enters the fourth beam along the original optical path.
- the longitudinal beam splitting prism 309, another part of the additional information beam 94 is turned by 90° and then enters the fifth lateral beam splitting prism 312, and the part of the second incident beam 92 that is laterally split by the third lateral beam splitter prism 310 passes through the second beam splitting prism 310.
- the five transverse beam splitting prisms 312 are superimposed with part of the additional information beams 94 incident on the fifth transverse beam splitting prism 312 to form a fifth superimposed beam 99 .
- the fifth superimposed light beam 99 emerging downward can be captured by the imaging device 7 to provide the imaging device 7 with an image.
- the image obtained by the imaging device 7 at this time is a superimposed image.
- the imaging lens group 62 may also be provided with an optical zoom system, and the image size of the additional information beam 94 after imaging can be adjusted by adjusting the optical zoom system.
- a filtering device 8 may also be arranged between the superimposing lens group 3 and the binocular lens barrel 5 .
- the filtering device 8 mainly adjusts the brightness of the additional information image to match the brightness of the optical image of the operating microscope, which is convenient for observation.
- optical filters can also be set to filter out or attenuate parts of the spectrum that are harmful to the human eye, such as reducing blue light damage.
- Polarizing filters, or spatial filtering devices, such as different clear apertures, can also be placed as desired.
- Various filter devices 8 can be switched by rotating the turntable or pushing and pulling.
- the above embodiment is an example description for the structure of the operating microscope in the operating microscope diagnostic system. Next, the specific content of the operating microscope diagnostic system is described:
- the surgical microscope diagnosis and treatment system includes a microscopic observation module, a storage module and an enhanced information image injection module.
- the microscopic observation module is used to observe the target object to be observed, and the microscopic observation module is any of the operating microscopes in the above embodiments.
- the digital image of the radiation imaging three-dimensional structure of the target object is imported into the storage module by means of external input or retrieval.
- the digital image of the three-dimensional structure of radiation imaging is preferably a CBCT digital image, and the following embodiments all take the CBCT digital image as an example to illustrate the technical solution.
- the enhanced information image injection module is used to project the digital image of the radiation imaging three-dimensional structure in the form of an optical image to the edge position in the observation field of the microscopic observation module, and the microscope observation module observes the mirror in the field of view.
- the lower optical image is superimposed to form a superimposed optical image, as shown in Figure 10, which provides a real-time reference for the operator.
- the system flow is shown in Figure 11.
- the enhanced information image injection module that is, the projection device 6 described in the above embodiment, requires additional digital information to be integrated and transmitted to the projection display unit 61 through wired HDMI, SDI, network port, wireless wifi, Bluetooth, etc., Convert to optical image and output.
- the CBCT digital image switch is controllable, and the operator can choose to view the layered two-dimensional image or 3D image of the target object as required, and the operator can choose to view the specific layered two-dimensional image to determine the internal structure of the tissue under the microscope.
- an operator is required to manually compare and register the CBCT digital image with the optical image under the microscope.
- the surgical microscope diagnosis and treatment system of this embodiment adds a 3D imaging module and an image recognition processing module.
- the 3D imaging module is used to collect in real time the optical image under the microscope in the field of view observed by the microscopic observation module, and convert the optical image under the microscope into a three-dimensional digital image.
- the image recognition processing module is used to identify the biometrics in the three-dimensional digital image, and through the biometric comparison, the CBCT digital image is automatically compared and registered with the three-dimensional digital image, and then will be compared with the three-dimensional digital image.
- the matched CBCT digital image is sent to the enhanced information image injection module, and finally projected in the observation field of the microscopic observation module.
- the system flow is shown in FIG. 12 .
- the operating microscope diagnosis and treatment system of this embodiment further includes a detection module.
- the detection module is used to respectively detect the focus position of the zoom large objective lens (ie the large objective lens group 4 ) and the magnification of the variable magnification system (ie the variable magnification lens group 2 ) of the operating microscope.
- the detection module preferably adopts a position sensor, that is, a position sensor is added to the position of the large zoom objective lens and the variable magnification system of the operating microscope respectively, and the image recognition processing module is determined according to the focus position of the large zoom objective lens detected by the position sensor.
- the image recognition processing module determines the depth range of the current layer region displayed by the CBCT digital image according to the magnification of the zoom system detected by the detection module.
- the focal depth position of the operating microscope is automatically registered with the CBCT layer depth, that is, a certain plane structure is observed under the microscope, and the CBCT digital image automatically displays the CT digital image of the current layer (or current layer area).
- the operating microscope diagnosis and treatment system of this embodiment is based on the tenth embodiment, and the CBCT digital image is displayed in a superimposed manner with the optical image under the microscope in the observation field of the microscopic observation module.
- the CBCT digital image transparency is adjustable.
- the surgical microscope diagnosis and treatment system of this embodiment further includes a positioning, navigation and detection module, and the positioning, navigation and detection module is installed on a surgical instrument, such as a dental handpiece.
- the positioning, navigation and detection module is used to detect the depth and spatial position data of the surgical instrument in real time
- the image recognition processing module combines the depth and spatial position data collected by the positioning and navigation detection module with the biological features in the three-dimensional digital image.
- the biological characteristics such as the position, shape and root canal depth, direction and other tissue characteristics of the root canal, obtain the real-time relative position data between the surgical instrument and the target object, and transmit the obtained real-time relative position data.
- the enhanced information image is injected into the module, and then projected on the set position of the observation field of view of the microscopic observation module.
- the state data of the surgical instrument can also be introduced, such as the rotational speed of the mobile phone, the torque value, etc., and can also be projected on the set position of the observation field of the microscopic observation module through the enhanced information image injection module.
- the position sensor set at the position of the zoom objective lens and the zoom system detects a change
- the real-time data of the surgical instrument is automatically projected at the set position of the observation field of the microscopic observation module, so that the doctor can confirm the operation in time.
- the depth and spatial position data of the surgical instrument and the state data of the surgical instrument can be stored in the storage module in real time.
- the operating microscope diagnosis and treatment system of this embodiment is based on any one of the ninth to eleventh embodiments, and introduces more relevant data, such as patient information data, root tester data, oral scanner data, electronic periodontal probe
- Multiple data information such as needle data and pulp vitality data can be stored in the storage module through external input or retrieval.
- Each data is provided with a display switch, which can be individually switched and controllable.
- the operator can project the required data through the enhanced information image injection module at the set position of the observation field of the microscopic observation module as required.
- the system flow is as follows: Figure 14.
- Each data can be projected on the set position of the observation field of the microscopic observation module in various ways such as text symbols, data tables, two-dimensional curves or three-dimensional topographic maps, and each data is divided into the observation field of the microscopic observation module.
- the display transparency of each data and the size and position of the display window of each data can be adjusted.
- Patient information data including the patient's basic information, contraindication reminders, etc., as well as monitoring information, blood pressure, blood oxygen saturation, etc.
- Root measuring instrument data accurate measurement of the working length of the root canal is the basic condition for successful root canal treatment. According to the diagnosis, the end points of root canal preparation and filling for different conditions of the teeth are different, and the error range of ⁇ 0.5mm needs to be guaranteed. Therefore, the root canal measuring instrument is used for measurement, and the data can be selectively displayed for reference.
- Oral scanner data high-resolution 3D morphology of oral structures.
- Periodontal probing is an important method for basic oral diagnosis. Using periodontal probe to measure the depth of periodontal pocket and the level of attachment is the main method for evaluating the degree of periodontal damage in clinical practice, and it is also the clinical basis for judging the change of periodontal disease.
- the Florida probe system can automatically measure the patient's periodontal pocket depth, attachment level, and attached gingival width under the operation of a medical staff, and record the full-mouth dentition, tooth mobility, gingival bleeding and suppuration, furcation lesions, Plaque distribution can reflect the degree of periodontal disease and prognostic indicators.
- the system's own risk factor assessment function can effectively assess the patient's disease risk, which helps doctors to objectively formulate targeted treatment plans for patients.
- Pulp vitality data The pulp is located in the pulp cavity surrounded by dentin, and is connected to the periapical tissue by a narrow apical foramen, which cannot be viewed directly, resulting in the inability to visually judge its specific state in clinical practice. .
- Clinically, temperature and electrical stimulation of the nerve fibers of the pulp are used to judge its vitality state, and help doctors to choose, completely remove the necrotic pulp, or perform amputation to preserve the healthy part.
- the operating microscope diagnosis and treatment system of this embodiment adds an AI-assisted analysis module on the basis of any one of Embodiments 9 to 12, so as to realize AI-assisted diagnosis and display.
- the AI auxiliary analysis module switch is controllable, and the switch can be a main switch or a separate function switch, and the operator can choose to turn on or off the corresponding AI auxiliary function according to needs.
- the AI-assisted analysis module is used to analyze the three-dimensional digital images collected by the 3D imaging module, identify the lesion condition of the target object, and mark or remind the target object according to the lesion condition. Each data is summarized and analyzed to generate additional AI auxiliary information.
- the operator can project the additional AI auxiliary information through the enhanced information image injection module at the set position of the observation field of the microscopic observation module as needed.
- the system flow is as follows: shown in Figure 15.
- the oral cavity and dental lesions such as caries, cracks, plaque, discoloration, oral cancer, etc.
- the marking method can be a separate method or a combination of different color text, frame, edge line, arrow, dyeing, etc.
- it can be combined with the prompt sound.
- the AI module can also automatically control the microscope to switch modes, and obtain images of the corresponding modes for further analysis.
- the specific mode switching implementation can refer to patent CN211741708U, which will not be repeated here.
- the surgical microscope diagnosis and treatment system of this embodiment can also add a camera module, such as a camera, etc., to obtain the patient's facial expression image data in real time, and analyze the facial expression image data collected by the camera module through the AI-assisted analysis module to judge the comfort level. , and is projected on the set position of the observation field of view of the microscopic observation module in real time through the enhanced information image injection module, so that the operator can know the patient's state at any time.
- a camera module such as a camera, etc.
Abstract
Description
Claims (13)
- 一种手术显微镜诊疗系统,其特征在于,其包括显微观察模块、存储模块和增强信息影像注入模块,所述显微观察模块用于观察待观察的目标对象;所述存储模块内存储有目标对象的辐射成像三维结构数字图像;所述增强信息影像注入模块用于将所述辐射成像三维结构数字图像以光学图像的形式投影至所述显微观察模块观察视野中,与所述显微观察模块观察视野内的镜下光学图像叠加形成叠加光学图像。
- 根据权利要求1所述的手术显微镜诊疗系统,其特征在于,所述辐射成像三维结构数字图像开关可控,操作者可以根据需要选择查看目标对象的分层二维图像或3D图像。
- 根据权利要求2所述的手术显微镜诊疗系统,其特征在于,其包括3D成像模块和图像识别处理模块,所述3D成像模块用于实时采集所述显微观察模块观察视野中的镜下光学图像,并将所述镜下光学图像转换为三维数字图像;所述图像识别处理模块用于识别所述三维数字图像中的生物特征,并通过生物特征对比,将与所述三维数字图像相匹配的辐射成像三维结构数字图像输送至所述增强信息影像注入模块,之后投影在所述显微观察模块观察视野中设定区域。
- 根据权利要求3所述的手术显微镜诊疗系统,其特征在于,其还包括检测模块,所述显微观察模块内设有变焦距大物镜和变倍系统,所述检测模块用于分别检测所述变焦距大物镜的对焦位置和所述变倍系统的倍率,所述图像识别处理模块根据所述检测模块检测到的所述变焦距大物镜的对焦位置确定所述辐射成像三维结构数字图像的深度位置,所述图像识别处理模块根据所述检测模块检测到的所述变倍系统的倍率确定所述辐射成像三维结构数字图像显示当前层区域的深度范围。
- 根据权利要求3所述的手术显微镜诊疗系统,其特征在于,所述辐射成像三维结构数字图像投影在所述显微观察模块观察视野的边缘位置,或所述辐射成像三维结构数字图像与所述显微观察模块观察视野内的镜下光学图像重合显示,所述辐射成像三维结构数字图像的透明度可调节。
- 根据权利要求5所述的手术显微镜诊疗系统,其特征在于,其还包括定位导航检测模块,所述定位导航检测模块安装在手术器械上,所述定位导航检 测模块用于实时检测所述手术器械的深度和空间位置数据,所述图像识别处理模块将所述定位导航检测模块采集到的深度和空间位置数据与三维数字图像中的生物特征进行比对,获得所述手术器械与目标对象之间的实时相对位置数据,并将获得的实时相对位置数据输送至所述增强信息影像注入模块,之后投影在所述显微观察模块观察视野的设定位置。
- 根据权利要求6所述的手术显微镜诊疗系统,其特征在于,所述手术器械的深度和空间位置数据,以及所述手术器械的状态数据实时存储在所述存储模块中,所述手术器械的状态数据能够被输送至所述增强信息影像注入模块,之后投影在所述显微观察模块观察视野的设定位置。
- 根据权利要求1所述的手术显微镜诊疗系统,其特征在于,所述存储模块内还存储有患者信息数据、根测仪数据、口腔扫描仪数据、电子牙周探针数据及牙髓活力数据,各数据分别开关可控,操作者可根据需要将所需数据通过所述增强信息影像注入模块投影在所述显微观察模块观察视野的设定位置。
- 根据权利要求8所述的手术显微镜诊疗系统,其特征在于,各数据以文字符号、数据表、二维曲线或三位地形图的方式投影在所述显微观察模块观察视野的设定位置,各数据在所述显微观察模块观察视野内分屏显示,或在同一窗口内切换显示,各数据的显示透明度以及各数据的显示窗口大小和位置可调节。
- 根据权利要求9所述的手术显微镜诊疗系统,其特征在于,其还包括AI辅助分析模块,所述AI辅助分析模块开关可控,操作者可以根据需要选择打开或关闭AI辅助功能,所述AI辅助分析模块用于对所述3D成像模块采集的三维数字图像进行分析,辨别目标对象的病变情况,并根据病变情况对目标对象进行标记或提醒,同时对所述存储模块内存储的各数据进行汇总分析,生成附加AI辅助信息,之后通过所述增强信息影像注入模块投影在所述显微观察模块观察视野的设定位置。
- 根据权利要求10所述的手术显微镜诊疗系统,其特征在于,其还包括摄像模块,所述摄像模块用于采集患者的表情图像数据,所述AI辅助分析模块对所述摄像模块采集的表情图像数据进行分析,判断患者的舒适度,并通过所述增强信息影像注入模块投影实时投影在所述显微观察模块观察视野的设定位置。
- 根据权利要求1所述的手术显微镜诊疗系统,其特征在于,所述显微观察模块包括手术显微镜,所述增强信息影像注入模块包括投影装置(6),所述投影装置(6)能够投射出附加信息光束(94),所述附加信息光束(94)与所述手术显微镜内的一路或两路入射光束叠加后射入所述手术显微镜的双目镜筒(5)内,形成叠加光学图像。
- 根据权利要求12所述的手术显微镜诊疗系统,其特征在于,所述投影装置(6)包括投影显示部件(61)和成像镜组(62),所述投影显示部件(61)能够投射出附加光学图像(93),所述附加光学图像(93)经过所述成像镜组(62)转换成平行光束,形成所述附加信息光束(94)。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023547528A JP2024507729A (ja) | 2021-02-10 | 2022-01-18 | 手術顕微鏡診療システム |
| EP22752089.7A EP4282379A1 (en) | 2021-02-10 | 2022-01-18 | Surgical microscope diagnosis and treatment system |
| US18/276,460 US20240108416A1 (en) | 2021-02-10 | 2022-01-18 | Surgical Microscope Diagnosis and Treatment System |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110185546.9 | 2021-02-10 | ||
| CN202110185546.9A CN114903634A (zh) | 2021-02-10 | 2021-02-10 | 一种手术显微镜诊疗系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022170927A1 true WO2022170927A1 (zh) | 2022-08-18 |
Family
ID=82761832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2022/072540 WO2022170927A1 (zh) | 2021-02-10 | 2022-01-18 | 一种手术显微镜诊疗系统 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240108416A1 (zh) |
| EP (1) | EP4282379A1 (zh) |
| JP (1) | JP2024507729A (zh) |
| CN (1) | CN114903634A (zh) |
| WO (1) | WO2022170927A1 (zh) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6081371A (en) * | 1998-01-06 | 2000-06-27 | Olympus Optical Co., Ltd. | Surgical microscope including a first image and a changing projection position of a second image |
| JP2001104335A (ja) * | 1999-10-08 | 2001-04-17 | Olympus Optical Co Ltd | 手術用観察システム |
| US20040070822A1 (en) * | 1999-09-21 | 2004-04-15 | Olympus Optical Co., Ltd. | Surgical microscopic system |
| US20050020876A1 (en) * | 2000-04-20 | 2005-01-27 | Olympus Corporation | Operation microscope |
| JP2005319120A (ja) * | 2004-05-10 | 2005-11-17 | Olympus Corp | 視野内表示装置 |
| CN108784836A (zh) * | 2018-06-20 | 2018-11-13 | 安徽医科大学第附属医院 | 基于优化镇静管理和区域阻滞骨科麻醉术中图像处理系统 |
| CN209765155U (zh) * | 2019-03-28 | 2019-12-10 | 上海美沃精密仪器股份有限公司 | 一种手术显微镜 |
| CN110996760A (zh) * | 2017-06-16 | 2020-04-10 | 迈克尔·S·柏林 | Oct引导的青光眼手术的方法和系统 |
| CN111616800A (zh) * | 2020-06-09 | 2020-09-04 | 电子科技大学 | 眼科手术导航系统 |
| CN211741708U (zh) | 2020-01-19 | 2020-10-23 | 苏州速迈医疗设备有限公司 | 一种手术显微镜 |
| CN215219313U (zh) * | 2021-02-10 | 2021-12-17 | 苏州速迈医学科技股份有限公司 | 一种手术显微镜 |
| CN216090895U (zh) * | 2021-02-10 | 2022-03-22 | 苏州速迈医学科技股份有限公司 | 一种手术显微镜诊疗系统 |
-
2021
- 2021-02-10 CN CN202110185546.9A patent/CN114903634A/zh active Pending
-
2022
- 2022-01-18 EP EP22752089.7A patent/EP4282379A1/en active Pending
- 2022-01-18 WO PCT/CN2022/072540 patent/WO2022170927A1/zh active Application Filing
- 2022-01-18 US US18/276,460 patent/US20240108416A1/en active Pending
- 2022-01-18 JP JP2023547528A patent/JP2024507729A/ja active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6081371A (en) * | 1998-01-06 | 2000-06-27 | Olympus Optical Co., Ltd. | Surgical microscope including a first image and a changing projection position of a second image |
| US20040070822A1 (en) * | 1999-09-21 | 2004-04-15 | Olympus Optical Co., Ltd. | Surgical microscopic system |
| JP2001104335A (ja) * | 1999-10-08 | 2001-04-17 | Olympus Optical Co Ltd | 手術用観察システム |
| US20050020876A1 (en) * | 2000-04-20 | 2005-01-27 | Olympus Corporation | Operation microscope |
| JP2005319120A (ja) * | 2004-05-10 | 2005-11-17 | Olympus Corp | 視野内表示装置 |
| CN110996760A (zh) * | 2017-06-16 | 2020-04-10 | 迈克尔·S·柏林 | Oct引导的青光眼手术的方法和系统 |
| CN108784836A (zh) * | 2018-06-20 | 2018-11-13 | 安徽医科大学第附属医院 | 基于优化镇静管理和区域阻滞骨科麻醉术中图像处理系统 |
| CN209765155U (zh) * | 2019-03-28 | 2019-12-10 | 上海美沃精密仪器股份有限公司 | 一种手术显微镜 |
| CN211741708U (zh) | 2020-01-19 | 2020-10-23 | 苏州速迈医疗设备有限公司 | 一种手术显微镜 |
| CN111616800A (zh) * | 2020-06-09 | 2020-09-04 | 电子科技大学 | 眼科手术导航系统 |
| CN215219313U (zh) * | 2021-02-10 | 2021-12-17 | 苏州速迈医学科技股份有限公司 | 一种手术显微镜 |
| CN216090895U (zh) * | 2021-02-10 | 2022-03-22 | 苏州速迈医学科技股份有限公司 | 一种手术显微镜诊疗系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024507729A (ja) | 2024-02-21 |
| US20240108416A1 (en) | 2024-04-04 |
| EP4282379A1 (en) | 2023-11-29 |
| CN114903634A (zh) | 2022-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ma et al. | Comprehensive review of surgical microscopes: technology development and medical applications | |
| CN106537225B (zh) | 一种对患者口腔内部的可视化装置 | |
| KR101070165B1 (ko) | 전자기 에너지 출력 장치를 위한 시각적 피드백 도구 | |
| JP5275417B2 (ja) | 患者の眼の前方セグメントを照明して観察するための装置および方法 | |
| JP5744084B2 (ja) | 歯科用画像表示装置、歯科用施術装置及び歯科用画像表示装置の作動方法 | |
| JP2017060778A (ja) | 灌流評価マルチモダリティ光学医用デバイス | |
| CN108670447B (zh) | 牙根管内实时导航系统及方法 | |
| CN112885436A (zh) | 一种基于增强现实三维成像的牙科手术实时辅助系统 | |
| KR20200026135A (ko) | 달팽이관에서의 미세 혈류 측정 방법 및 장치 | |
| CN112336309A (zh) | 一种光纤式舌下微循环连续监测装置 | |
| JP5043145B2 (ja) | 診断システム | |
| WO2022170928A1 (zh) | 一种牙科显微诊疗系统 | |
| CN216090895U (zh) | 一种手术显微镜诊疗系统 | |
| CN215219313U (zh) | 一种手术显微镜 | |
| WO2022170927A1 (zh) | 一种手术显微镜诊疗系统 | |
| Shetty et al. | Magnification-An endodontic review | |
| CN112353379A (zh) | 具有挂钩式传感器结构的探测体及舌底微循环探测装置 | |
| Engelke et al. | In vitro visualization of human endodontic structures using different endoscope systems | |
| CN216145020U (zh) | 一种增强影像系统 | |
| Dhingra et al. | Recent advances in endodontic visualization: a review | |
| CN216021503U (zh) | 一种牙科显微诊疗系统 | |
| TW201236635A (en) | Oral optical diagnosing apparatus and operating method thereof | |
| CN114364306A (zh) | 裂隙灯显微镜、眼科信息处理装置、眼科系统、裂隙灯显微镜的控制方法以及记录介质 | |
| WO2022262852A1 (zh) | 一种增强影像系统及其实现方法 | |
| Javed et al. | Surgical endodontics under the microscope: principles and practice |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22752089 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023547528 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18276460 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022752089 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2022752089 Country of ref document: EP Effective date: 20230824 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |