WO2022145258A1 - Movement instruction device, movement instruction system, movement instruction method, and program - Google Patents
Movement instruction device, movement instruction system, movement instruction method, and program Download PDFInfo
- Publication number
- WO2022145258A1 WO2022145258A1 PCT/JP2021/046747 JP2021046747W WO2022145258A1 WO 2022145258 A1 WO2022145258 A1 WO 2022145258A1 JP 2021046747 W JP2021046747 W JP 2021046747W WO 2022145258 A1 WO2022145258 A1 WO 2022145258A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- motion
- skin
- user
- exercise
- physical
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 27
- 230000035807 sensation Effects 0.000 claims abstract description 71
- 210000003205 muscle Anatomy 0.000 claims abstract description 59
- 230000004936 stimulating effect Effects 0.000 claims description 143
- 230000000638 stimulation Effects 0.000 claims description 27
- 230000000694 effects Effects 0.000 claims description 17
- 230000003183 myoelectrical effect Effects 0.000 claims description 7
- 210000000689 upper leg Anatomy 0.000 claims description 6
- 206010049816 Muscle tightness Diseases 0.000 claims description 5
- 210000003423 ankle Anatomy 0.000 claims description 4
- 210000003811 finger Anatomy 0.000 claims description 4
- 210000000245 forearm Anatomy 0.000 claims description 4
- 238000010801 machine learning Methods 0.000 claims description 4
- 210000003739 neck Anatomy 0.000 claims description 4
- 210000003371 toe Anatomy 0.000 claims description 4
- 210000005010 torso Anatomy 0.000 claims description 4
- 210000000707 wrist Anatomy 0.000 claims description 4
- 210000001699 lower leg Anatomy 0.000 claims description 3
- 210000001217 buttock Anatomy 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 230000001939 inductive effect Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- 210000002414 leg Anatomy 0.000 description 3
- 210000003314 quadriceps muscle Anatomy 0.000 description 3
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000013527 convolutional neural network Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000010297 mechanical methods and process Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 210000002027 skeletal muscle Anatomy 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 210000002683 foot Anatomy 0.000 description 1
- 210000001624 hip Anatomy 0.000 description 1
- 230000007794 irritation Effects 0.000 description 1
- 210000002239 ischium bone Anatomy 0.000 description 1
- 230000003155 kinesthetic effect Effects 0.000 description 1
- 210000004705 lumbosacral region Anatomy 0.000 description 1
- 210000000412 mechanoreceptor Anatomy 0.000 description 1
- 108091008704 mechanoreceptors Proteins 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 229920001084 poly(chloroprene) Polymers 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000006403 short-term memory Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 210000002435 tendon Anatomy 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
Definitions
- the present invention relates to an exercise teaching device, an exercise teaching system, an exercise teaching method and a program.
- the head-mounted display can play back the first-person viewpoint image taken by a stereo camera that matches the viewpoint position of the expert during operation, and the ambient sound of the expert recorded by the binoral microphone is binoral.
- a skill teaching system that can be regenerated, has a vibration device provided at a position corresponding to the mounting position of a myoelectric sensor attached to a skilled person, and can vibrate the vibrating device based on a signal of the myoelectric sensor of a skilled person is disclosed. (See, for example, Non-Patent Document 1).
- Non-Patent Document 1 can sequentially teach the user a plurality of muscles to be moved in conjunction with each other when only the vibration device is used, but it is a stimulation by vibration.
- the stimulus is easily diffused, and in particular, it may not be possible to express a state in which the muscles are still tense, and the physical sensation of a skilled person has not been induced. Therefore, there is a problem that a particularly superior teaching effect is not obtained as compared with the teaching when only the video information is used.
- the present invention has been made in view of the above problems, and an object thereof is a wearable device capable of teaching a user the teaching motion of a motion instructor by inducing a physical sensation of the motion instructor. Is to provide.
- the exercise teaching device is a wearable exercise for inducing a physical sensation of a motion teacher by presenting a force sense on the skin of a user to teach physical exercise.
- This motion teaching device includes a body motion information acquisition unit that acquires body motion information of a motion teacher, a plurality of stimulating elements arranged on the skin close to the surface of a plurality of muscles of the user, and a plurality of stimuli. It includes a control unit that controls the element. Each of the plurality of stimulating elements stimulates the skin close to the surface of the user's muscles. The control unit controls a plurality of stimulating elements so as to form a mechanical distribution on the skin that generates a target force sensation based on the body movement information acquired by the body movement information acquisition unit. This force sensation induces the user to feel the body of the motion teacher.
- the exercise teaching device may include a storage unit that stores information on the physical exercise of the motion instructor.
- the physical exercise information acquisition unit may acquire physical exercise information from the storage unit.
- the stimulating element may stimulate the skin by rotational movement.
- the control unit may control the rotation angle and rotation direction of the stimulating element.
- the control unit may control the stimulating element so that the larger the target force sense is, the larger the rotation angle of the stimulating element is.
- the stimulating element stimulates the skin by rotational movement
- the control unit may control the rotational speed and rotation direction of the stimulating element.
- the control unit may control the stimulator element so that the larger the target force sense is, the larger the rotation speed of the stimulator element is.
- the stimulating element may stimulate the skin by rotational movement
- the control unit may control the rotational torque and the rotational direction of the stimulating element.
- the control unit may control the stimulating element so that the larger the target force sense, the larger the rotational torque of the stimulating element.
- the spacing between adjacent stimulating elements may be such that the ranges of force sense presented by the adjacent stimulating elements overlap.
- the stimulating element may be placed on the skin close to the surface of the user's upper arm, forearm, wrist, fingers, thigh, lower leg, ankle, toe, neck, torso or lumbar muscles. .. Further, the stimulating element may be arranged at one place on the skin near the thickest part of each muscle, at each part of the skin near the tendons at both ends of each muscle, or at a plurality of places so as to cover the skin on the surface of each muscle. good.
- the stimulating element may stimulate the skin by electrical stimulation in addition to rotational movement.
- Another aspect of the present invention is an exercise teaching system.
- This system includes the above-mentioned motion teaching device and a motion instructor motion measuring device that measures information on the body motion of the motion instructor in real time.
- the physical exercise information acquisition unit may acquire information on the physical exercise of the motion instructor from the motion instructor motion measuring device.
- the motion instructor's physical exercise information may include myoelectric potential, muscle tension, or amount of skin deformation.
- the exercise teaching system may include a user exercise measuring device that measures information on the user's physical exercise in real time.
- the control unit controls a plurality of stimulus elements based on the difference between the motion teacher's body motion information measured by the motion instructor motion measuring device and the user's body motion information measured by the user motion measuring device. You may.
- the control unit may be characterized by controlling a plurality of stimulating elements so that the user forms a mechanical distribution on the skin that generates a force sensation that increases muscle activity so that the difference becomes small.
- the exercise teaching system machine-learns the physical motion information of the motion instructor and the mechanical distribution of the motion instructor's skin estimated from the motion instructor information as learning data. Even if the motion information acquisition unit is further provided with a learning unit that outputs a mechanical distribution that generates a desired force sense when the motion information of the motion instructor acquired from the motion instructor motion measuring device is input. good.
- the motion teaching system may include a wearable display device that displays a first-person video captured at the viewpoint position of the motion instructor.
- the motion teaching system may include a microphone that binaurally records ambient sounds during the teaching motion of the motion instructor, and a wearable playback device that reproduces the voice recorded by the microphone.
- This method is an exercise teaching method for inducing a physical sensation of a motion instructor to teach physical exercise by presenting a force sense to the user's skin, and acquires information on the physical exercise of the motion instructor. It comprises a step and a step of stimulating the skin close to the surface of the user's muscle using a plurality of stimulating elements placed on the skin close to the surface of the user's muscle.
- the plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on the information of the body movement, and this force sensation induces the user to induce the physical sensation of the motion teacher.
- This program is an exercise teaching method for inducing a physical sensation of a motion instructor to teach physical exercise by presenting a force sense to the user's skin, and acquires information on the physical exercise of the motion instructor.
- the plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on the information of the body movement, and this force sensation induces the user to induce the physical sensation of the motion teacher.
- FIG. 3 is a view of a user wearing the motion teaching device of FIG. 3 viewed from diagonally rear left. It is a perspective view of the stimulating element unit of the motion teaching apparatus of FIG. It is a graph which shows the positive correlation between the intensity of activity based on exercise, and the intensity of stimulation. It is a functional block diagram of the exercise teaching system which concerns on the twelfth embodiment. It is a functional block diagram of the exercise teaching system which concerns on 14th Embodiment.
- strain energy density distribution a distribution of mechanical quantities per unit volume, for example, a distribution of strain energy (hereinafter referred to as “strain energy density distribution”) is formed on the skin. That is, when a person exercises in contact with a sheet or the like, strain is generated in each part of the skin. The temporal and spatial distribution of the energy density of this strain is considered to reflect the characteristics such as the type, magnitude, and direction of the motion. In the mechanoreceptors inside the skin that control the sense of force, the frequency of neuron firing is determined by this strain energy density distribution. Therefore, if the strain energy density distribution corresponding to various movements is formed on the skin by stimulating the skin of the person, the person can perform such movements without actually moving the person. It is thought that it can induce a feeling of being, or what kind of exercise you are going to do.
- the part of the skin that gives irritation is not limited to the buttocks, but the back, abdomen, head, upper arm, forearm, wrist, fingers, thigh, lower leg, ankle, toes, neck, torso, waist, etc.
- Any site may be used as long as it is a site for forming a strain energy density distribution corresponding to the desired motion.
- the distribution of mechanical quantities corresponding to the target motion (hereinafter referred to as "mechanical distribution”) is not limited to the strain energy density distribution, but the distribution of strain (for example, main strain and equivalent strain) and force. It also includes the distribution of (eg, shear forces, vertical strains, etc.), stresses (ie, forces per unit area, such as pressure, principal stress, Mieses stress, etc.).
- the sensation of muscle movement and load felt when a person moves or is about to move the body is referred to as "physical sensation”.
- the force sense force sense
- presenting the magnitude and direction of the force is called “presenting the force sense”.
- the technique that serves as a model can be accurately and accurately used. It can be taught efficiently.
- Information on such model physical movements can be acquired and accumulated by measuring or estimating the physical movements of the motion instructor. Based on this information, the user can perform correct exercise and muscles by stimulating the skin close to the surface of the user's muscles so as to form a mechanical distribution on the skin that produces the desired force sensation. You can learn how to use it. On the contrary, it is also conceivable to use such means to induce the movement instructor to have a physical sensation when the user is moving. By understanding the physical sensation of the user in this way, it is expected that the motion instructor can more accurately provide guidance for motion instruction.
- FIG. 1 shows a functional block of the exercise teaching device 1 according to the first embodiment.
- the exercise teaching device 1 teaches physical exercise by presenting a sense of force to the skin S close to the surface of the user's muscle M.
- the exercise teaching device 1 is wearable. That is, the user can wear the exercise teaching device 1 on the body.
- the exercise teaching device 1 includes n stimulating elements 11, 12, ..., 1n, a body exercise information acquisition unit 20, and a control unit 30 (n is an integer of 2 or more).
- the physical exercise information acquisition unit 20 acquires information on the physical exercise of the motion instructor.
- the physical exercise of the motion instructor is the exercise of the muscles when the motion instructor performs the technique, and serves as a model for the user.
- the body movement information acquisition unit 20 may acquire information stored in advance in a storage device or the like of a server, or may acquire the actual body movement of the motion instructor in real time by communication.
- the physical exercise information acquisition unit 20 transmits the acquired information to the control unit 30.
- the control unit 30 controls the stimulating elements 11, 12, ..., 1n so as to form a mechanical distribution on the skin S that generates a target force sensation based on the information acquired by the body movement information acquisition unit 20. ..
- the control unit 30 may be configured using known computer hardware and software.
- the stimulating elements 11, 12, ..., 1n are arranged on the skin S close to the surface of the user's muscle M.
- Each of the stimulating elements 11, 12, ..., 1n stimulates the skin S close to the surface of the user's muscle M.
- the method in which the stimulating elements 11, 12, ..., 1n stimulate the skin S may be a mechanical method such as rotational movement, pulling in the shear direction, compression, or suction.
- Each of the stimulating elements 11, 12, ..., 1n may be capable of presenting a sense of force by itself. Alternatively, it may be possible to present a sense of force only when a plurality of stimuli jointly form a predetermined mechanical distribution.
- the interval between adjacent stimulating elements may be an interval capable of presenting a spatially continuous force sense.
- the spacing between adjacent stimulating elements may be, for example, such that the ranges of force sense presented by the adjacent stimulating elements overlap. Alternatively, the spacing between adjacent stimulating elements may be within the range of the two-point discrimination threshold in the area of the skin.
- FIG. 13 is a time-series signal of muscle tensions of the rectus femoris, vastus lateralis, adductor magnus, and gastrocnemius muscles for about 2 seconds when a person starts kicking up the foot.
- each muscle starts to move almost at the same time, but after that, each muscle individually performs a complicated contraction.
- humans are not consciously performing such complex contractions of muscles at the level of individual muscles, but are demonstrating what they have learned as an overall movement of kicking up. Therefore, if the user is given a time-series change in the mechanical distribution obtained from the physical motion of the motion instructor, the user is experiencing the physical sensation of the motion instructor, and the motion is most effectively performed. You will learn.
- the physical exercise of the motion instructor can be effectively taught to the user.
- FIG. 2 shows a functional block of the exercise teaching device 2 according to the second embodiment.
- the exercise teaching device 2 also teaches physical exercise by presenting a sense of force to the skin S close to the surface of the user's muscle M.
- the exercise teaching device 2 includes n stimulating elements 11, 12, ..., 1n, a body exercise information acquisition unit 20, a control unit 30, and a storage unit 40 (n is an integer of 2 or more). That is, the motion teaching device 2 includes a storage unit 40 in addition to the configuration of the motion teaching device 1 of FIG.
- the storage unit 40 stores information on the physical movement of the motion instructor.
- the body movement information acquisition unit 20 acquires information on the body movement of the motion instructor from the storage unit 40.
- the storage unit 40 may memorize the ideal physical movement of the motion instructor.
- the user can learn the physical exercise that serves as a model stored in the storage unit 40.
- the storage unit 40 may store the physical information of the user when the user is in the best condition. In this case, the user can regain the physical exercise when he / she is in the best condition when he / she falls into a slump or the like.
- the user can acquire the desired physical exercise by storing the physical exercise information of the motion instructor in the storage unit 40.
- the stimulating elements 11, 12, ..., 1n may stimulate the skin by rotational movement.
- the control unit 30 may control the rotation angle and rotation direction of the stimulation elements 11, 12, ..., 1n.
- the stimulus applied to the skin is not due to suction, electrical stimulation, temperature stimulation, compression, or translational movement along the shear direction of the skin. It is desirable that it is due to rotational movement.
- the reason is as follows. For one thing, in such a form, it is premised that the stimulus is applied to the skin through clothing. In this case, stimuli such as suction, electrical stimulus or temperature stimulus cannot be directly applied.
- the stimulation by compression is not suitable for teaching physical exercise because it causes the user to interfere with the exercise.
- the mechanism becomes complicated, and there is a problem that it is difficult to apply it to a form in which stimulating elements are densely arranged on the skin.
- the presentation of the stimulus by the rotational movement can be applied to the embodiment without the above-mentioned problems.
- FIG. 3 is a perspective view of the motion teaching device 3.
- FIG. 4 is a view of a user wearing the exercise teaching device 3 as viewed from diagonally rear left.
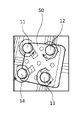
- FIG. 5 is a perspective view of the stimulating element unit 50 of the motion teaching device 3.
- the exercise teaching device 3 is attached to the left and right thighs and the left and right lower legs of the user.
- four stimulating elements 11, 12, ..., 1n are combined into one stimulating element unit. That is, the motion teaching device 3 includes a total of eight stimulating element units.
- the stimulating element unit 50 is substantially square. Stimulating elements are arranged at the four corners of the stimulating element unit 50, respectively.
- FIG. 5 shows a state in which the stimulating elements 11, 12, 13 and 14 are grouped together in the stimulating element unit 50. Eight stimulating element units are arranged in the motion teaching device 3. That is, as shown in FIGS. 3 and 4, the stimulating elements 11, 12, ..., 132 are on the skin in which the three stimulating element units are close to the surfaces of the left and right biceps femoris and quadriceps muscles, respectively.
- One stimulator unit is placed on the skin close to the surface of the soleus muscle of the left and right thighs, respectively.
- Each of the stimulating elements 11, 12, ..., 132 has a disk shape with a diameter of 20 mm and a thickness of 5 mm. If the stimulating elements 11, 12, ..., 124 are too hard, they do not fit into the body, and the pain caused by the contact of the edges of the stimulating elements 11, 12, ..., 132, and the stimulating elements 11, 12, ..., 132 and clothes Sliding between is likely to occur. On the contrary, if the stimulating elements 11, 12, ..., 132 are too soft, it becomes difficult to transmit the rotational force. In consideration of these characteristics, an appropriate chloroprene rubber sponge is used as a material for the stimulating elements 11, 12, ..., 132.
- a small servo motor is used for the actuator for rotating the stimulating elements 11, 12, ..., 132.
- the maximum output torque of this servomotor is 0.2 Nm, which is sufficient to deform the skin on the back.
- the stimulating elements 11, 12, ..., 132 are controlled to rotate at a rotation angle of 30 degrees and a rotation speed of 60 degrees / sec.
- the present inventor has experimentally confirmed that a mechanical distribution that generates a physical sensation can be formed on the skin by appropriately controlling the rotation angle and rotation direction of the stimulating elements 11, 12, ..., 1n. In this case, not only the rotation angle but also the time until the rotation angle is reached may be included in the control parameter.
- the body movement can be taught accurately and efficiently by stimulating the user's skin by rotational movement and controlling the angle and direction of the rotation.
- the control unit 30 may control the stimulating elements 11, 12, ..., 1n so that the larger the target force sense, the larger the rotation angle of the stimulating elements 11, 12, ..., 1n.
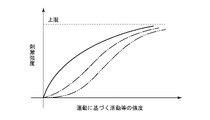
- the present inventor has found that the magnitude of the desired force sensation (that is, the intensity of activity based on motion) and the strain energy density often have a positive correlation. It can also be seen that the strain energy density and the rotation angles of the stimulating elements 11, 12, ..., 1n also have a positive correlation. Therefore, the larger the target force sense, the larger the rotation angle of the stimulating elements 11, 12, ..., 1n.
- the stimulating elements 11, 12, ..., 1n By controlling the stimulating elements 11, 12, ..., 1n, the physical sensation is induced. be able to.
- stimulating elements 11, 12, ..., 1n that stimulate the skin by rotational movement are used to appropriately control the rotational speed and rotational direction of these stimulating elements to generate physical sensations.
- a mechanical distribution may be formed on the skin. In this case, not only the rotation speed but also the time until the rotation speed is reached may be included in the control parameter.
- the body movement can be taught accurately and efficiently by stimulating the user's skin by rotational movement and controlling the speed and direction of the rotation.
- the control unit 30 increases the target force sense (that is, the intensity of the activity based on the movement), the stimulation elements 11, 12, ..., The stimulation elements 11, 12, ... 1n may be controlled. It can also be seen that the strain energy density has a positive correlation with the rotational speeds of the stimulating elements 11, 12, ..., 1n. Therefore, the greater the target force sensation, the greater the rotational speed of the stimulating elements 11, 12, ..., 1n. By controlling the stimulating elements 11, 12, ..., 1n, the physical sensation is induced. be able to.
- stimulating elements 11, 12, ..., 1n that stimulate the skin by rotational movement are used to appropriately control the rotational torque and rotational direction of these stimulating elements to generate bodily sensations.
- a mechanical distribution may be formed on the skin. In this case, not only the rotational torque but also the time until the rotational torque is reached may be included in the control parameters.
- the body movement can be taught accurately and efficiently by stimulating the user's skin by rotational movement and controlling the torque and direction of the rotation.
- the control unit 30 increases the rotational torque of the stimulating elements 11, 12, ...,
- the greater the target force sense that is, the intensity of the activity based on the movement
- the greater the stimulating elements 11, 12, ... 1n may be controlled.
- the strain energy density has a positive correlation with the rotational torque of the stimulating elements 11, 12, ..., 1n. Therefore, the larger the target force sense, the larger the rotational torque of the stimulating elements 11, 12, ..., 1n.
- control is performed based on the rotation angle and the rotation speed, the control becomes inaccurate.
- control is performed based on the rotational torque, accurate control is possible even if the user moves and the stimulation electrode and the user's skin slip or slip.
- the spacing between adjacent stimulating elements may be such that the ranges of force sense presented by the adjacent stimulating elements overlap.
- the present inventor has found that spatially continuous force sensation can be more reliably presented by providing such an interval between adjacent stimulating elements.
- the stimulator was placed on the skin close to the surface of the muscles of the user's thighs and lower legs.
- the stimulating element is not limited to this, and the stimulating element may be placed at any site in the vicinity of the muscles that control movement, such as the user's upper arm, forearm, wrist, finger, ankle, toe, neck, torso, and lumbar region. .. According to this embodiment, the range of application to the body part of the user can be expanded.
- the stimulating element may stimulate the skin by electrical stimulation in addition to rotational movement. That is, the stimulating element combines rotational motion stimulus and electrical stimulus to form a force sensation on the skin that generates a more realistic sensation of physical motion. According to this embodiment, it is possible to accurately teach physical exercise.
- FIG. 7 shows a functional block of the exercise teaching system 4 according to the twelfth embodiment.
- the motion teaching system 4 includes a motion teaching device 1 according to the first embodiment and a motion instructor motion measuring device 60.
- the motion instructor motion measuring device 60 measures the body motion information of the motion instructor in real time.
- the body movement information acquisition unit 20 acquires information on the body movement of the movement instructor from the movement instructor movement measuring device 60.
- the motion instructor motion measuring device 60 is, for example, a biosensor attached to various parts of the body of the motion instructor.
- the control unit 30 forms a mechanical distribution on the user's skin based on the body movement information of the motion instructor that the body movement information acquisition unit 20 acquires from moment to moment.
- the motion teaching device is not limited to this, and the motion teaching device may be any of the above-described embodiments.
- the physical motion information of the motion instructor may include the myoelectric potential, muscle tension, skin deformation, etc. of the motion instructor.
- the motion instructor motion measuring device 60 includes a myoelectric potential sensor, a muscle strength measuring device, a skin strain measuring device, and the like. According to this embodiment, it is possible to acquire the body movement information of the motion instructor from various biological information.
- FIG. 8 shows a functional block of the exercise teaching system 5 according to the fourteenth embodiment.
- the motion teaching system 5 includes a motion teaching device 1 according to the first embodiment, a motion instructor motion measuring device 60, and a user motion measuring device 70.
- the user motion measuring device 70 measures the user's physical motion information in real time.
- the body movement information acquisition unit 20 is a stimulus element 11 based on the difference between the body movement information of the movement teacher measured by the movement teacher movement measuring device 60 and the body movement information of the user measured by the user movement measuring device 70. , 12, ..., 1n is controlled.
- the user motion measuring device 70 is, for example, a biosensor attached to various parts of the user's body.
- the control unit 30 forms a mechanical distribution on the skin of the user based on the difference in physical movement between the motion teacher and the user, which changes from moment to moment. As a result, the user can acquire the target physical exercise while modifying his / her own physical exercise with respect to the physical exercise of the motion instructor as a model.
- the motion teaching system 5 has described an example including the motion teaching device 1, the motion teaching device is not limited to this, and the motion teaching device may be any of the above-described embodiments.
- the control unit 30 allows the user to perform muscle activity so that the difference between the physical motion information of the motion instructor measured by the motion instructor motion measuring device 60 and the physical motion information of the user measured by the user motion measuring device 70 becomes small.
- the stimulating elements 11, 12, ..., 1n are controlled so as to form a mechanical distribution on the skin that generates a force sensation. That is, the control unit 30 forms a mechanical distribution on the user's skin that generates a physical sensation that causes the user to move muscles stronger or faster in order to bring the user's physical movement closer to that of the motion teacher. do. This allows the user to master the target physical movement by modifying his or her physical movement to move the muscles stronger or faster with respect to the physical movement of the model motion teacher. ..
- the control unit 30 allows the user to perform muscle activity so that the difference between the physical motion information of the motion instructor measured by the motion instructor motion measuring device 60 and the physical motion information of the user measured by the user motion measuring device 70 becomes small.
- the stimulating elements 11, 12, ..., 1n are controlled so as to form a mechanical distribution on the skin that generates a force sensation that causes the body to rest. That is, in order to bring the user's physical movement closer to the physical movement of the motion instructor, the control unit 30 applies a mechanical distribution on the user's skin to generate a physical sensation that causes the muscle currently being exercised by the user to stand still. Form.
- the user can acquire the target physical movement by modifying his / her own physical movement so as to keep the muscles stationary with respect to the physical movement of the motion instructor as a model.
- FIG. 9 shows a functional block of the exercise teaching system 6 according to the 17th embodiment.
- the motion teaching system 6 includes a motion teaching device 1 according to the first embodiment, a motion teacher motion measuring device 60, a learning unit 80, and a mechanical distribution estimation unit 21.
- the learning unit 80 has two operation modes, that is, a first operation mode and a second operation mode.
- the first operation mode is the learning mode
- the second operation mode is the control mode.
- the learning unit 80 uses a large amount of physical motion information of the motion instructor and the mechanical distribution of the skin of the motion instructor estimated by the mechanical distribution estimation unit 21 from the physical motion information as learning data.
- Machine learning is a large amount of physical motion information of the motion instructor and the mechanical distribution of the skin of the motion instructor estimated by the mechanical distribution estimation unit 21 from the physical motion information as learning data.
- the mechanical distribution may be directly observed using a myoelectric sensor or the like as a motion instructor motion measuring device, or may be estimated by a finite element method or the like from the state of skin deformation.
- the learning unit 80 is mechanically estimated based on the learning result when the body movement information of the movement teacher acquired by the body movement information acquisition unit 20 from the movement teacher movement measuring device 60 is input.
- the distribution is output to the control unit 30.
- the control unit 30 controls each stimulating element on the user's skin to form the mechanical distribution on the user's skin, and induces the user to have a physical sensation of the motion instructor.
- the conversion from the mechanical distribution to the controlled variable of each stimulus element is performed using a table in which the relationship between the two is previously tabulated.
- Machine learning may be performed by a known AI.
- the specific method of AI is not particularly limited, but for example, a convolutional neural network (CNN), a recursive neural network (RNN), an LSTM network (Long Short Term Memory), etc.
- CNN convolutional neural network
- RNN recursive neural network
- LSTM Long Short Term Memory
- different neural networks may be mixed for each calculation model after sharing the input layer.
- a large number of pairs of the presented force sense and the mechanical distribution that generates the force sense are prepared, and AI is made to learn these as learning data.
- the AI can output a mechanical distribution that generates a desired force sensation when the body movement information of the motion instructor is input.
- FIG. 10 shows a functional block of the exercise teaching system 7 according to the eighteenth embodiment.
- the motion teaching system 7 includes a motion teaching device 1 according to the first embodiment, a motion instructor motion measuring device 60, a camera 90, and a display device 92.
- the camera 90 captures the physical movement of the motion instructor.
- the display device 92 is a wearable display device that displays an image taken by the camera 90 to the user.
- the camera 90 may be, for example, a high-definition camera or a stereo camera.
- the display device 92 may be, for example, an HMD (head-mounted display). According to the present embodiment, by using the skin stimulation by the stimulating elements 11, 12, ..., 1n and the visual stimulation by the display device 92 in combination, it is possible to teach the physical sensation with a higher sense of presence.
- FIG. 11 shows a functional block of the exercise teaching system 8 according to the nineteenth embodiment.
- the motion teaching system 8 includes a motion teaching device 1 according to the first embodiment, a motion instructor motion measuring device 60, a microphone 94, and a reproduction device 96.
- the microphone 94 records the voice accompanying the physical exercise of the motion instructor.
- the reproduction device 96 is a wearable reproduction device that reproduces the voice recorded by the microphone 94 to the user.
- the microphone 94 may be a stereo microphone such as a binaural microphone.
- the playback device 96 may be, for example, headphones. According to the present embodiment, by using the skin stimulation by the stimulating elements 11, 12, ..., 1n and the auditory stimulation by the regenerating device 96 in combination, it is possible to teach the physical sensation with a higher sense of presence.
- FIG. 12 shows a processing flow of the exercise teaching method according to the twentieth embodiment.
- This motion teaching method uses step S1 to acquire information on the body movement of the motion instructor and a plurality of stimulating elements arranged on the skin close to the surface of the user's muscle, and the surface of the user's muscle.
- the step S2 which stimulates the skin in the vicinity of the skin, is provided.
- the plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on body movement information.
- the interval between the adjacent stimulating elements is an interval capable of teaching a spatially continuous force sense. Force sensation induces the user to feel the physical sensation when the motion instructor is performing physical exercise.
- this exercise teaching method acquires information on the physical exercise of the motion instructor.
- the physical exercise of the motion instructor is the exercise of the muscles when the motion instructor performs the technique, and serves as a model for the user.
- the information stored in advance in the storage device or the like may be acquired, or the actual physical exercise of the motion instructor may be acquired in real time.
- this exercise teaching method stimulates the skin close to the surface of the user's muscle by using a plurality of stimulating elements arranged on the skin close to the surface of the user's muscle.
- the method of stimulating the skin by the stimulating element may be a mechanical method such as rotational movement, pulling in the shear direction, compression, or suction.
- Each stimulating element may be capable of presenting a sense of force by itself. Alternatively, it may be possible to present a sense of force only when a plurality of stimuli jointly form a predetermined mechanical distribution.
- the interval between adjacent stimulating elements is an interval that can present a spatially continuous force sense. If the distance between the stimulating elements is too large, the force sense becomes spatially discontinuous. In this case, it is not possible to form a mechanical distribution on the skin that produces the desired force sensation.
- the spacing between adjacent stimulating elements may be, for example, such that the ranges of force sense presented by the adjacent stimulating elements overlap. Alternatively, the spacing between adjacent stimulating elements may be within the range of the two-point discrimination threshold in the area of the skin.
- the force sense induces the user to feel the physical sensation when the motion instructor is performing physical exercise. That is, by the force sensation presented by this movement teaching method, the user should move which muscle with what strength in order to reproduce the body movement of the movement teacher (that is, to perform the ideal body movement). You can get a good feeling, including the change over time.
- the physical exercise of the motion instructor can be accurately taught to the user.
- the 21st embodiment is a program. This program causes a computer to execute the exercise teaching method according to the twentieth embodiment described above. According to this embodiment, it is possible to realize teaching of physical exercise with high reality as software.
- the mechanical distribution formed on the skin by the stimulating element may be a strain energy density distribution.
- the mechanical distribution may be a strain distribution, which strain may be the principal strain or the equivalent strain.
- the mechanical distribution may be a force distribution, which may be a shear force or a normal force.
- the mechanical distribution may be a stress distribution, which stress may be either pressure, principal stress or von Mises stress.
- the present invention can be industrially used as an exercise teaching device, an exercise teaching system, an exercise teaching method and a program.
Abstract
This wearable movement instruction device for giving instruction on physical movement by haptic presentation to the skin of a user comprises: a physical movement information acquisition unit for acquiring information on physical movement by a motion instructor; a plurality of stimulus elements arranged on the skin in proximity to the surface of the user's muscle; and a control unit for controlling the plurality of stimulus elements. Each of the plurality of stimulus elements applies a stimulus to the skin in proximity to the surface of the user's muscle. The control unit controls the plurality of stimulus elements so as to form, on the skin, a mechanical distribution for producing a targeted haptic sensation on the basis of the information acquired by the physical movement information acquisition unit. The interval between adjacent stimulus elements is an interval that allows instruction of spatially continuous haptic sensation. The haptic sensation induces, in the user, the bodily sensation of when the motion instructor is performing the physical movement.
Description
本発明は、運動教示装置、運動教示システム、運動教示方法およびプログラムに関する。
The present invention relates to an exercise teaching device, an exercise teaching system, an exercise teaching method and a program.
スポーツや職人の技術などの分野において、高い技能を持つ熟練者の技能伝承が課題になっている。熟練者の身体感覚をユーザに直接伝えられれば効果的な技能伝承が可能になると期待されるが、そのようなことを可能とする技術はまだ知られていない。こうした要望を実現しようとする技術として、動作中の熟練者の視点位置に合わせたステレオカメラで撮影した一人称視点映像をヘッドマウンテッドディスプレイで再生でき、バイノーラルマイクで録音した熟練者の周囲音をバイノーラル再生でき、熟練者に取り付けた筋電センサの取り付け位置に対応する位置に振動デバイスを設け、熟練者の筋電センサの信号に基づき振動デバイスを振動させることができる技能教示システムが開示されている(例えば、非特許文献1を参照)。
In fields such as sports and craftsmanship, the skill transfer of highly skilled skilled workers has become an issue. It is expected that effective skill transfer will be possible if the physical sensation of the expert is directly transmitted to the user, but the technique that makes such a thing possible is not yet known. As a technology to meet these demands, the head-mounted display can play back the first-person viewpoint image taken by a stereo camera that matches the viewpoint position of the expert during operation, and the ambient sound of the expert recorded by the binoral microphone is binoral. A skill teaching system that can be regenerated, has a vibration device provided at a position corresponding to the mounting position of a myoelectric sensor attached to a skilled person, and can vibrate the vibrating device based on a signal of the myoelectric sensor of a skilled person is disclosed. (See, for example, Non-Patent Document 1).
しかしながら、非特許文献1に記載された技能教示システムは、振動デバイスのみを使用した場合、ユーザに、連動して動かすべき複数の筋肉を順次教示することはできるものの、振動による刺激であるために刺激が拡散し易く、特に筋が緊張したまま静止しているような状態が表現できないということもあり、熟練者の身体感覚を誘発させるには至っていない。このため、映像情報のみを使用した場合の教示と比較して、特段に優位な教示効果が得られているわけではないという課題がある。
However, the skill teaching system described in Non-Patent Document 1 can sequentially teach the user a plurality of muscles to be moved in conjunction with each other when only the vibration device is used, but it is a stimulation by vibration. The stimulus is easily diffused, and in particular, it may not be possible to express a state in which the muscles are still tense, and the physical sensation of a skilled person has not been induced. Therefore, there is a problem that a particularly superior teaching effect is not obtained as compared with the teaching when only the video information is used.
本発明は、以上のような課題に鑑みてなされたものであり、その目的は、動作教示者の教示動作をユーザに動作教示者の身体感覚を誘発させることで教示することができるウェアラブルなデバイスを提供することにある。
The present invention has been made in view of the above problems, and an object thereof is a wearable device capable of teaching a user the teaching motion of a motion instructor by inducing a physical sensation of the motion instructor. Is to provide.
上記課題を解決するために、本発明のある態様の運動教示装置は、ユーザの皮膚に力覚を提示することによって動作教示者の身体感覚を誘発させて身体運動を教示するためのウェアラブルな運動教示装置である。この運動教示装置は、動作教示者の身体運動の情報を取得する身体運動情報取得部と、ユーザの複数の筋肉の表面に近接する皮膚の上に配置される複数の刺激素子と、複数の刺激素子を制御する制御部とを備える。複数の刺激素子の各々は、ユーザの筋肉の表面に近接する皮膚に刺激を与える。制御部は、身体運動情報取得部が取得した身体運動の情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成するように複数の刺激素子を制御する。この力覚は、ユーザに動作教示者の身体感覚を誘発させる。
In order to solve the above-mentioned problems, the exercise teaching device according to an aspect of the present invention is a wearable exercise for inducing a physical sensation of a motion teacher by presenting a force sense on the skin of a user to teach physical exercise. It is a teaching device. This motion teaching device includes a body motion information acquisition unit that acquires body motion information of a motion teacher, a plurality of stimulating elements arranged on the skin close to the surface of a plurality of muscles of the user, and a plurality of stimuli. It includes a control unit that controls the element. Each of the plurality of stimulating elements stimulates the skin close to the surface of the user's muscles. The control unit controls a plurality of stimulating elements so as to form a mechanical distribution on the skin that generates a target force sensation based on the body movement information acquired by the body movement information acquisition unit. This force sensation induces the user to feel the body of the motion teacher.
ある実施の形態では、運動教示装置は、動作教示者の身体運動の情報を記憶する記憶部を備えてもよい。身体運動情報取得部は、記憶部から身体運動の情報を取得してもよい。
In certain embodiments, the exercise teaching device may include a storage unit that stores information on the physical exercise of the motion instructor. The physical exercise information acquisition unit may acquire physical exercise information from the storage unit.
刺激素子は、回転運動によって皮膚に刺激を与えてもよい。制御部は、刺激素子の回転角度および回転方向を制御してもよい。
The stimulating element may stimulate the skin by rotational movement. The control unit may control the rotation angle and rotation direction of the stimulating element.
制御部は、目的とする力覚が大きければ大きいほど、刺激素子の回転角度が大きくなるように刺激素子を制御してもよい。
The control unit may control the stimulating element so that the larger the target force sense is, the larger the rotation angle of the stimulating element is.
刺激素子は、回転運動によって皮膚に刺激を与え、制御部は、刺激素子の回転速度および回転方向を制御してもよい。
The stimulating element stimulates the skin by rotational movement, and the control unit may control the rotational speed and rotation direction of the stimulating element.
制御部は、目的とする力覚が大きければ大きいほど、刺激素子の回転速度が大きくなるように刺激素子を制御してもよい。
The control unit may control the stimulator element so that the larger the target force sense is, the larger the rotation speed of the stimulator element is.
刺激素子は、回転運動によって皮膚に刺激を与え、制御部は、刺激素子の回転トルクおよび回転方向を制御してもよい。
The stimulating element may stimulate the skin by rotational movement, and the control unit may control the rotational torque and the rotational direction of the stimulating element.
制御部は、目的とする力覚が大きければ大きいほど、刺激素子の回転トルクが大きくなるように刺激素子を制御してもよい。
The control unit may control the stimulating element so that the larger the target force sense, the larger the rotational torque of the stimulating element.
隣接する刺激素子間の間隔は、当該隣接する刺激素子によって提示される力覚の範囲が重なりを持つような間隔であってもよい。
The spacing between adjacent stimulating elements may be such that the ranges of force sense presented by the adjacent stimulating elements overlap.
刺激素子は、ユーザの上腕部、前腕部、手首、手指、大腿部、下腿部、足首、足指、首、胴体または腰部の筋肉の表面に近接する皮膚の上に配置されてもよい。また、刺激素子は、各筋肉の最も太くなる部位の近傍の皮膚一カ所、または各筋肉の両端の腱に近い皮膚それぞれの箇所、または各筋肉表面の皮膚を覆うように複数箇所配置してもよい。
The stimulating element may be placed on the skin close to the surface of the user's upper arm, forearm, wrist, fingers, thigh, lower leg, ankle, toe, neck, torso or lumbar muscles. .. Further, the stimulating element may be arranged at one place on the skin near the thickest part of each muscle, at each part of the skin near the tendons at both ends of each muscle, or at a plurality of places so as to cover the skin on the surface of each muscle. good.
刺激素子は、回転運動に加えて、電気刺激によって皮膚に刺激を与えてもよい。
The stimulating element may stimulate the skin by electrical stimulation in addition to rotational movement.
本発明の別の態様は、運動教示システムである。このシステムは、前述の運動教示装置と、動作教示者の身体運動の情報をリアルタイムに計測する動作教示者運動計測装置と、を備える。身体運動情報取得部は、動作教示者運動計測装置から動作教示者の身体運動の情報を取得してもよい。
Another aspect of the present invention is an exercise teaching system. This system includes the above-mentioned motion teaching device and a motion instructor motion measuring device that measures information on the body motion of the motion instructor in real time. The physical exercise information acquisition unit may acquire information on the physical exercise of the motion instructor from the motion instructor motion measuring device.
動作教示者の身体運動の情報は、筋電位、筋張力または皮膚変形量を含んでもよい。
The motion instructor's physical exercise information may include myoelectric potential, muscle tension, or amount of skin deformation.
ある実施の形態では、運動教示システムは、ユーザの身体運動の情報をリアルタイムに計測するユーザ運動計測装置を備えてもよい。制御部は、動作教示者運動計測装置が計測した動作教示者の身体運動の情報と、ユーザ運動計測装置が計測したユーザの身体運動の情報との差異に基づいて、複数の刺激素子を制御してもよい。
In certain embodiments, the exercise teaching system may include a user exercise measuring device that measures information on the user's physical exercise in real time. The control unit controls a plurality of stimulus elements based on the difference between the motion teacher's body motion information measured by the motion instructor motion measuring device and the user's body motion information measured by the user motion measuring device. You may.
制御部は、差異が小さくなるように、ユーザが筋活動を増大させる力覚を発生させる力学的分布を皮膚に形成するように複数の刺激素子を制御することを特徴してもよい。
The control unit may be characterized by controlling a plurality of stimulating elements so that the user forms a mechanical distribution on the skin that generates a force sensation that increases muscle activity so that the difference becomes small.
ある実施の形態では、運動教示システムは、動作教示者の身体運動の情報と、前記身体運動の情報から推定した動作教示者の皮膚の力学的分布とを学習データとして機械学習することにより、身体運動情報取得部が動作教示者運動計測装置から取得した動作教示者の身体運動の情報が入力されたときに、目的とする力覚を発生させる力学的分布を出力する学習部をさらに備えてもよい。
In one embodiment, the exercise teaching system machine-learns the physical motion information of the motion instructor and the mechanical distribution of the motion instructor's skin estimated from the motion instructor information as learning data. Even if the motion information acquisition unit is further provided with a learning unit that outputs a mechanical distribution that generates a desired force sense when the motion information of the motion instructor acquired from the motion instructor motion measuring device is input. good.
ある実施の形態では、運動教示システムは、動作教示者の視点位置で撮影された一人称映像を表示するウェアラブルな表示装置と、を備えてもよい。
In certain embodiments, the motion teaching system may include a wearable display device that displays a first-person video captured at the viewpoint position of the motion instructor.
ある実施の形態では、運動教示システムは、動作教示者の教示動作中の周囲音をバイノーラル収録するマイクロフォンと、マイクロフォンで収録された音声を再生するウェアラブルな再生装置と、を備えてもよい。
In certain embodiments, the motion teaching system may include a microphone that binaurally records ambient sounds during the teaching motion of the motion instructor, and a wearable playback device that reproduces the voice recorded by the microphone.
本発明の別の態様は、運動教示方法である。この方法は、ユーザの皮膚に力覚を提示することによって動作教示者の身体感覚を誘発させて身体運動を教示するための運動教示方法であって、動作教示者の身体運動の情報を取得するステップと、ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、ユーザの筋肉の表面に近接する皮膚に刺激を与えるステップと、を備える。複数の刺激素子は、身体運動の情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成し、この力覚は、ユーザに動作教示者の身体感覚を誘発させる。
Another aspect of the present invention is an exercise teaching method. This method is an exercise teaching method for inducing a physical sensation of a motion instructor to teach physical exercise by presenting a force sense to the user's skin, and acquires information on the physical exercise of the motion instructor. It comprises a step and a step of stimulating the skin close to the surface of the user's muscle using a plurality of stimulating elements placed on the skin close to the surface of the user's muscle. The plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on the information of the body movement, and this force sensation induces the user to induce the physical sensation of the motion teacher.
本発明のさらに別の態様は、プログラムである。このプログラムは、ユーザの皮膚に力覚を提示することによって動作教示者の身体感覚を誘発させて身体運動を教示するための運動教示方法であって、動作教示者の身体運動の情報を取得するステップと、ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、ユーザの筋肉の表面に近接する皮膚に刺激を与えるステップと、を備える方法をコンピュータに実行させる。複数の刺激素子は、身体運動の情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成し、この力覚は、ユーザに動作教示者の身体感覚を誘発させる。
Yet another aspect of the present invention is a program. This program is an exercise teaching method for inducing a physical sensation of a motion instructor to teach physical exercise by presenting a force sense to the user's skin, and acquires information on the physical exercise of the motion instructor. Have the computer perform a method comprising a step and a step of stimulating the skin close to the surface of the user's muscle using multiple stimulators placed on the skin close to the surface of the user's muscle. .. The plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on the information of the body movement, and this force sensation induces the user to induce the physical sensation of the motion teacher.
なお、以上の構成要素の任意の組合せ、本発明の表現を装置、方法、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。
It should be noted that any combination of the above components and the conversion of the expression of the present invention between devices, methods, systems, recording media, computer programs, etc. are also effective as aspects of the present invention.
本発明によれば、動作教示者の身体運動を的確にユーザに教示することができる。
According to the present invention, it is possible to accurately teach the user the physical exercise of the motion instructor.
以下、本発明を好適な実施の形態をもとに各図面を参照しながら説明する。実施の形態および変形例では、同一または同等の構成要素、ステップ、部材には同一の符号を付するものとし、適宜重複した説明は省略する。また、各図面における部材の寸法は、理解を容易にするために適宜拡大、縮小して示す。また、各図面において実施の形態を説明する上で重要でない部材の一部は省略して表示する。また、第1、第2などの序数を含む用語が多様な構成要素を説明するために用いられるが、こうした用語は一つの構成要素を他の構成要素から区別する目的でのみ用いられ、この用語によって構成要素が限定されるものではない。
Hereinafter, the present invention will be described with reference to each drawing based on a preferred embodiment. In the embodiments and modifications, the same or equivalent components, steps, and members are designated by the same reference numerals, and redundant description will be omitted as appropriate. In addition, the dimensions of the members in each drawing are shown enlarged or reduced as appropriate for easy understanding. In addition, some of the members that are not important for explaining the embodiment in each drawing are omitted and displayed. In addition, terms including ordinal numbers such as 1st and 2nd are used to describe various components, but these terms are used only for the purpose of distinguishing one component from other components, and this term is used. The components are not limited by.
具体的な実施の形態を説明する前に、基礎となる知見を説明する。本発明者は、自らが行った研究の結果、人の臀部の皮膚にせん断変形(皮膚の方向に沿った変形)を加えることにより、乗り物に乗ったときに誘発される加速感覚や、起伏を乗り越えた際の上下方向の運動感覚を再現できることを見出した。
Before explaining the specific embodiment, the basic knowledge will be explained. As a result of the research conducted by the present inventor, the sensation of acceleration and undulations induced when riding a vehicle are obtained by applying shear deformation (deformation along the direction of the skin) to the skin of the human buttocks. We found that it is possible to reproduce the vertical kinesthetic sensation when overcoming.
例えば自動車のシートに腰掛けた状態で、加速または減速したりステアリングを切ったりすると、運転者の臀部の一部は、前後や左右の方向にせん断変形する。本発明者はこの現象に着目し、シートに前後および左右に運動する接触子を設けて、被験者の臀部にせん断変形を与えるだけで、被験者の前後および左右方向の加速感覚を誘発して再現できることを見出した。
For example, when accelerating or decelerating or turning the steering while sitting on a car seat, a part of the driver's buttocks undergoes shear deformation in the front-back and left-right directions. The present inventor pays attention to this phenomenon, and can induce and reproduce the acceleration sensation in the front-back and left-right directions of the subject simply by providing a contactor that moves back and forth and left and right on the seat and applying shear deformation to the buttocks of the subject. I found.
また、自動車に乗って段差や起伏を乗り越えると、身体が上下方向に運動して変位する。こうした上下運動の感覚も、皮膚のせん断変形により再現できることが分かった。例えば臀部がシートの座面から鉛直方向に運動すると、坐骨付近に分布していた圧力分布のピークは、尾てい骨の方向に変位する。本発明者はこの現象に着目し、圧力分布のピーク位置の変位を臀部の皮膚のせん断変形によって提示するだけで、座面からの突き上げに伴う感覚の誘発が可能となることを見出した。さらに本発明者は、起伏を乗り越えた際に生じる進行方向へのせん断力を臀部に提示するだけで、起伏を乗り越えたという感覚を誘発して再現できることをも見出した。
Also, when you get on a car and get over steps and undulations, your body moves up and down and displaces. It was found that such a sensation of vertical movement can be reproduced by shear deformation of the skin. For example, when the buttocks move in the vertical direction from the seat surface of the seat, the peak of the pressure distribution distributed near the ischium is displaced toward the coccyx. The present inventor focused on this phenomenon and found that it is possible to induce a sensation accompanying pushing up from the seat surface only by presenting the displacement of the peak position of the pressure distribution by the shear deformation of the skin of the buttocks. Furthermore, the present inventor has also found that the sensation of overcoming undulations can be induced and reproduced only by presenting the shearing force in the traveling direction generated when overcoming undulations to the buttocks.
本発明者は、このような感覚が誘発される理由について、以下のような仮説を立てた。先ず、こうしたせん断力が皮膚に与えられると、皮膚には、単位体積あたりの力学的量の分布、例えばひずみエネルギーの分布(以下、「ひずみエネルギー密度分布」という)が形成される。すなわち、人がシートなどに接触した状態で運動すると、皮膚の各箇所にひずみが発生する。このひずみのエネルギー密度の時間的および空間的な分布は、当該運動の種類、大きさ、方向などの特性を反映したものであると考えられる。力覚を司っている皮膚内部の機械受容器は、このひずみエネルギー密度分布によってニューロン発火の頻度が決定される。従って、人の皮膚に刺激を与えることによって、様々な運動に対応するひずみエネルギー密度分布を皮膚に形成すれば、実際にその人を動かさなくても、その人に自分がそのような運動をしているという感覚、あるいはこれから自分がどのような運動をしようとしているかという感覚を誘発できると考えられる。
The present inventor made the following hypothesis as to the reason why such a sensation is induced. First, when such a shearing force is applied to the skin, a distribution of mechanical quantities per unit volume, for example, a distribution of strain energy (hereinafter referred to as “strain energy density distribution”) is formed on the skin. That is, when a person exercises in contact with a sheet or the like, strain is generated in each part of the skin. The temporal and spatial distribution of the energy density of this strain is considered to reflect the characteristics such as the type, magnitude, and direction of the motion. In the mechanoreceptors inside the skin that control the sense of force, the frequency of neuron firing is determined by this strain energy density distribution. Therefore, if the strain energy density distribution corresponding to various movements is formed on the skin by stimulating the skin of the person, the person can perform such movements without actually moving the person. It is thought that it can induce a feeling of being, or what kind of exercise you are going to do.
刺激を与える皮膚の部位は、臀部に限られず、背部、腹部、頭部、上腕部、前腕部、手首、手指、大腿部、下腿部、足首、足指、首、胴体あるいは腰部など、目的とする運動に対応するひずみエネルギー密度分布が形成されるための部位であれば、いずれであってもよい。また、目的とする運動に対応する力学的量の分布(以下、「力学的分布」と呼ぶ)は、ひずみエネルギー密度分布に限られず、ひずみ(例えば、主ひずみや相当ひずみなど)の分布、力(例えば、せん断力や垂直抗力など)の分布、応力(すなわち、単位面積あたりの力。例えば、圧力、主応力、ミーゼス応力など)の分布なども含む。
The part of the skin that gives irritation is not limited to the buttocks, but the back, abdomen, head, upper arm, forearm, wrist, fingers, thigh, lower leg, ankle, toes, neck, torso, waist, etc. Any site may be used as long as it is a site for forming a strain energy density distribution corresponding to the desired motion. In addition, the distribution of mechanical quantities corresponding to the target motion (hereinafter referred to as "mechanical distribution") is not limited to the strain energy density distribution, but the distribution of strain (for example, main strain and equivalent strain) and force. It also includes the distribution of (eg, shear forces, vertical strains, etc.), stresses (ie, forces per unit area, such as pressure, principal stress, Mieses stress, etc.).
以下本明細書では、人が身体を動かしたとき、あるいはこれから動かそうとしているときに感じる筋肉の動きや負荷の感覚を「身体感覚」と呼ぶ。また、人の身体感覚を引き起こす力覚(力の感覚)について、当該力の大きさと方向を提示することを「力覚を提示する」という。
Hereinafter, in the present specification, the sensation of muscle movement and load felt when a person moves or is about to move the body is referred to as "physical sensation". In addition, regarding the force sense (force sense) that causes a person's physical sensation, presenting the magnitude and direction of the force is called "presenting the force sense".
スポーツ、楽器演奏、乗り物の運転あるいは職人技といった技術の分野において、高い技能を持つ動作教示者の身体感覚を、個々の筋肉毎にユーザに教示することができれば、手本となる技術を正確かつ効率的に伝授することができる。こうした手本となる身体運動の情報は、動作教示者の身体運動を計測または推定することにより取得・蓄積することができる。このような情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成するように、ユーザの筋肉の表面に近接する皮膚に刺激を与えることで、ユーザは正しい運動や筋肉の使い方を習得することができる。またこれとは逆に、こうした手段を用いて、ユーザが動作している際の身体感覚を動作教示者に誘発させることも考えられる。このようにユーザの身体感覚を理解することで、動作教示者はより的確に動作教示のための指導を行えると期待される。
In the field of technology such as sports, musical instrument playing, vehicle driving or craftsmanship, if the physical sensation of a highly skilled motion instructor can be taught to the user for each individual muscle, the technique that serves as a model can be accurately and accurately used. It can be taught efficiently. Information on such model physical movements can be acquired and accumulated by measuring or estimating the physical movements of the motion instructor. Based on this information, the user can perform correct exercise and muscles by stimulating the skin close to the surface of the user's muscles so as to form a mechanical distribution on the skin that produces the desired force sensation. You can learn how to use it. On the contrary, it is also conceivable to use such means to induce the movement instructor to have a physical sensation when the user is moving. By understanding the physical sensation of the user in this way, it is expected that the motion instructor can more accurately provide guidance for motion instruction.
[第1の実施の形態]
図1に、第1の実施の形態に係る運動教示装置1の機能ブロックを示す。運動教示装置1は、ユーザの筋肉Mの表面に近接する皮膚Sに力覚を提示することによって身体運動を教示する。運動教示装置1は、ウェアラブルである。すなわちユーザは、運動教示装置1を身体に装着することができる。運動教示装置1は、n個の刺激素子11、12、…、1nと、身体運動情報取得部20と、制御部30と、を備える(nは2以上の整数)。 [First Embodiment]
FIG. 1 shows a functional block of theexercise teaching device 1 according to the first embodiment. The exercise teaching device 1 teaches physical exercise by presenting a sense of force to the skin S close to the surface of the user's muscle M. The exercise teaching device 1 is wearable. That is, the user can wear the exercise teaching device 1 on the body. The exercise teaching device 1 includes n stimulating elements 11, 12, ..., 1n, a body exercise information acquisition unit 20, and a control unit 30 (n is an integer of 2 or more).
図1に、第1の実施の形態に係る運動教示装置1の機能ブロックを示す。運動教示装置1は、ユーザの筋肉Mの表面に近接する皮膚Sに力覚を提示することによって身体運動を教示する。運動教示装置1は、ウェアラブルである。すなわちユーザは、運動教示装置1を身体に装着することができる。運動教示装置1は、n個の刺激素子11、12、…、1nと、身体運動情報取得部20と、制御部30と、を備える(nは2以上の整数)。 [First Embodiment]
FIG. 1 shows a functional block of the
身体運動情報取得部20は、動作教示者の身体運動の情報を取得する。動作教示者の身体運動とは、動作教示者が技を披露するときの筋肉の運動であり、ユーザの手本となるものである。身体運動情報取得部20は、サーバの記憶装置等に予め記憶された情報を取得してもよいし、動作教示者の実際の身体運動を通信によってリアルタイムに取得してもよい。身体運動情報取得部20は、取得した情報を制御部30に送信する。
The physical exercise information acquisition unit 20 acquires information on the physical exercise of the motion instructor. The physical exercise of the motion instructor is the exercise of the muscles when the motion instructor performs the technique, and serves as a model for the user. The body movement information acquisition unit 20 may acquire information stored in advance in a storage device or the like of a server, or may acquire the actual body movement of the motion instructor in real time by communication. The physical exercise information acquisition unit 20 transmits the acquired information to the control unit 30.
制御部30は、身体運動情報取得部20が取得した情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚Sに形成するように刺激素子11、12、…、1nを制御する。制御部30は、既知のコンピュータのハードウェアおよびソフトウェアを用いて構成されてよい。
The control unit 30 controls the stimulating elements 11, 12, ..., 1n so as to form a mechanical distribution on the skin S that generates a target force sensation based on the information acquired by the body movement information acquisition unit 20. .. The control unit 30 may be configured using known computer hardware and software.
刺激素子11、12、…、1nは、ユーザの筋肉Mの表面に近接する皮膚Sの上に配置される。 刺激素子11、12、…、1nの各々は、ユーザの筋肉Mの表面に近接する皮膚Sに刺激を与える。刺激素子11、12、…、1nが皮膚Sに刺激を与える方法は、回転運動、せん断方向への引っ張り、圧迫、吸引などの力学的方法であってよい。刺激素子11、12、…、1nは、各々が単体で力覚を提示できるものであってもよい。あるいは、複数の刺激が共同して所定の力学的分布を形成することによって初めて力覚を提示できるものであってもよい。
The stimulating elements 11, 12, ..., 1n are arranged on the skin S close to the surface of the user's muscle M. Each of the stimulating elements 11, 12, ..., 1n stimulates the skin S close to the surface of the user's muscle M. The method in which the stimulating elements 11, 12, ..., 1n stimulate the skin S may be a mechanical method such as rotational movement, pulling in the shear direction, compression, or suction. Each of the stimulating elements 11, 12, ..., 1n may be capable of presenting a sense of force by itself. Alternatively, it may be possible to present a sense of force only when a plurality of stimuli jointly form a predetermined mechanical distribution.
隣接する刺激素子間の間隔は、空間的に連続な力覚を提示可能な間隔であってもよい。隣接する刺激素子間の間隔は、例えば、当該隣接する刺激素子によって提示される力覚の範囲が重なりを持つような間隔であってもよい。あるいは、隣接する刺激素子間の間隔は、当該皮膚の領域における二点弁別閾の範囲内にある間隔であってもよい。
The interval between adjacent stimulating elements may be an interval capable of presenting a spatially continuous force sense. The spacing between adjacent stimulating elements may be, for example, such that the ranges of force sense presented by the adjacent stimulating elements overlap. Alternatively, the spacing between adjacent stimulating elements may be within the range of the two-point discrimination threshold in the area of the skin.
運動教示装置1によって提示される力覚によって、ユーザは、無意識に動作教示者の身体運動を再現してしまう。このようにユーザが無意識に動作教示者の身体動作を再現する機序はまだ詳細に明らかにされてはいないが、各筋肉の近傍に発生したひずみエネルギー密度分布などの力学的分布に各筋肉が反応して反射的に収縮することが連動的に行われるためであると推察される。例えば図13は、人が足を蹴り上げる動作を開始したときの約2秒間の大腿直筋、外側広筋、大内転筋、腓腹筋の筋張力の時系列信号である。ここでは、動作の開始時点ではほぼ同時に各筋肉が動き始めるものの、その後、各筋肉は個々に複雑な収縮を行っている。すなわち人は、このような筋肉の複雑な収縮を個々の筋肉のレベルで意識的に行っているのではなく、蹴り上げるという全体的動作として身につけたものを技量として発揮しているのである。従って、動作教示者の身体動作から得られた力学的分布の時系列変化がユーザに与えられれば、ユーザは動作教示者の身体感覚を経験していることになり、最も効果的にその動作を習得することになる。
The user unknowingly reproduces the physical movement of the motion instructor by the force sense presented by the motion teaching device 1. Although the mechanism by which the user unconsciously reproduces the body movement of the teacher has not yet been clarified in detail, each muscle has a mechanical distribution such as a strain energy density distribution generated in the vicinity of each muscle. It is presumed that this is because the reaction and reflexive contraction are performed in conjunction with each other. For example, FIG. 13 is a time-series signal of muscle tensions of the rectus femoris, vastus lateralis, adductor magnus, and gastrocnemius muscles for about 2 seconds when a person starts kicking up the foot. Here, at the beginning of the movement, each muscle starts to move almost at the same time, but after that, each muscle individually performs a complicated contraction. In other words, humans are not consciously performing such complex contractions of muscles at the level of individual muscles, but are demonstrating what they have learned as an overall movement of kicking up. Therefore, if the user is given a time-series change in the mechanical distribution obtained from the physical motion of the motion instructor, the user is experiencing the physical sensation of the motion instructor, and the motion is most effectively performed. You will learn.
本実施の形態によれば、ユーザの皮膚に刺激を与えることによって、動作教示者の身体運動を効果的にユーザに教示することができる。
According to the present embodiment, by stimulating the skin of the user, the physical exercise of the motion instructor can be effectively taught to the user.
[第2の実施の形態]
図2に、第2の実施の形態に係る運動教示装置2の機能ブロックを示す。運動教示装置2も、ユーザの筋肉Mの表面に近接する皮膚Sに力覚を提示することによって身体運動を教示する。運動教示装置2は、n個の刺激素子11、12、…、1nと、身体運動情報取得部20と、制御部30と、記憶部40と、を備える(nは2以上の整数)。すなわち、運動教示装置2は、図1の運動教示装置1の構成に加えて、記憶部40を備える。 [Second Embodiment]
FIG. 2 shows a functional block of the exercise teaching device 2 according to the second embodiment. The exercise teaching device 2 also teaches physical exercise by presenting a sense of force to the skin S close to the surface of the user's muscle M. The exercise teaching device 2 includes n stimulating elements 11, 12, ..., 1n, a body exercise information acquisition unit 20, a control unit 30, and a storage unit 40 (n is an integer of 2 or more). That is, the motion teaching device 2 includes a storage unit 40 in addition to the configuration of the motion teaching device 1 of FIG.
図2に、第2の実施の形態に係る運動教示装置2の機能ブロックを示す。運動教示装置2も、ユーザの筋肉Mの表面に近接する皮膚Sに力覚を提示することによって身体運動を教示する。運動教示装置2は、n個の刺激素子11、12、…、1nと、身体運動情報取得部20と、制御部30と、記憶部40と、を備える(nは2以上の整数)。すなわち、運動教示装置2は、図1の運動教示装置1の構成に加えて、記憶部40を備える。 [Second Embodiment]
FIG. 2 shows a functional block of the exercise teaching device 2 according to the second embodiment. The exercise teaching device 2 also teaches physical exercise by presenting a sense of force to the skin S close to the surface of the user's muscle M. The exercise teaching device 2 includes
刺激素子11、12、…、1nの構成と動作は、運動教示装置1のものと共通であるので、説明を省略する。記憶部40は、動作教示者の身体運動の情報を記憶する。身体運動情報取得部20は、記憶部40から、動作教示者の身体運動の情報を取得する。例えば記憶部40は、動作教示者の理想的な身体運動を記憶してもよい。この場合ユーザは、記憶部40に記憶された手本となる身体運動を習得することができる。あるいは記憶部40は、ユーザがベストコンディションのときの当該ユーザの身体情報を記憶してもよい。この場合ユーザは、スランプ等に陥ったとき、自分がベストコンディションだったときの身体運動を取り戻すことができる。
Since the configurations and operations of the stimulating elements 11, 12, ..., 1n are the same as those of the motion teaching device 1, the description thereof will be omitted. The storage unit 40 stores information on the physical movement of the motion instructor. The body movement information acquisition unit 20 acquires information on the body movement of the motion instructor from the storage unit 40. For example, the storage unit 40 may memorize the ideal physical movement of the motion instructor. In this case, the user can learn the physical exercise that serves as a model stored in the storage unit 40. Alternatively, the storage unit 40 may store the physical information of the user when the user is in the best condition. In this case, the user can regain the physical exercise when he / she is in the best condition when he / she falls into a slump or the like.
本実施の形態によれば、動作教示者の身体運動の情報を記憶部40に記憶させておくことにより、ユーザは所望の身体運動を習得することができる。
According to the present embodiment, the user can acquire the desired physical exercise by storing the physical exercise information of the motion instructor in the storage unit 40.
[第3の実施の形態]
刺激素子11、12、…、1nは、回転運動によって皮膚に刺激を与えてよい。このとき制御部30は、刺激素子11、12、…、1nの回転角度および回転方向を制御してもよい。 [Third Embodiment]
The stimulating elements 11, 12, ..., 1n may stimulate the skin by rotational movement. At this time, the control unit 30 may control the rotation angle and rotation direction of the stimulation elements 11, 12, ..., 1n.
刺激素子11、12、…、1nは、回転運動によって皮膚に刺激を与えてよい。このとき制御部30は、刺激素子11、12、…、1nの回転角度および回転方向を制御してもよい。 [Third Embodiment]
The
特にユーザの筋肉の表面に近接する皮膚に力覚を提示する場合、皮膚に与える刺激は、吸引、電気刺激、温度刺激、圧迫、または皮膚のせん断方向に沿った並進運動などによるものではなく、回転運動によるものであることが望ましい。その理由は以下の通りである。1つには、このような形態では、刺激は衣服を介して皮膚に与えられることが前提となる。この場合、例えば吸引、電気刺激または温度刺激などによる刺激は直接適用することができない。2つには、圧迫による刺激は、使用者の運動を妨げる原因となるので、身体運動の教示に向かない。さらに3つには、皮膚のせん断方向に沿った並進運動による刺激を与えようとした場合、動力源となるモータの回転運動を並進運動に変換する必要がある。このため機構が複雑となり、皮膚上に刺激素子を密に並べた形態には適用が難しいという問題がある。この点、回転運動による刺激提示は、上記のような問題を伴うことなく実施の形態に適用することができる。
Especially when presenting a sense of force to the skin close to the surface of the user's muscles, the stimulus applied to the skin is not due to suction, electrical stimulation, temperature stimulation, compression, or translational movement along the shear direction of the skin. It is desirable that it is due to rotational movement. The reason is as follows. For one thing, in such a form, it is premised that the stimulus is applied to the skin through clothing. In this case, stimuli such as suction, electrical stimulus or temperature stimulus cannot be directly applied. Secondly, the stimulation by compression is not suitable for teaching physical exercise because it causes the user to interfere with the exercise. Furthermore, when trying to give a stimulus by translational motion along the shear direction of the skin, it is necessary to convert the rotational motion of the motor as a power source into translational motion. For this reason, the mechanism becomes complicated, and there is a problem that it is difficult to apply it to a form in which stimulating elements are densely arranged on the skin. In this respect, the presentation of the stimulus by the rotational movement can be applied to the embodiment without the above-mentioned problems.
図3から図5を用いて、第3の実施の形態に係る運動教示装置3を説明する。図3は、運動教示装置3の斜視図である。図4は、運動教示装置3を装着したユーザを左斜め後方から見た図である。図5は、運動教示装置3の刺激素子ユニット50の斜視図である。
The exercise teaching device 3 according to the third embodiment will be described with reference to FIGS. 3 to 5. FIG. 3 is a perspective view of the motion teaching device 3. FIG. 4 is a view of a user wearing the exercise teaching device 3 as viewed from diagonally rear left. FIG. 5 is a perspective view of the stimulating element unit 50 of the motion teaching device 3.
図3および図4に示されるように、運動教示装置3は、ユーザの左右の大腿部および左右の下腿部に装着される。刺激素子11、12、…、1nは、計32個の刺激素子から構成される。すなわちn=32である。図5に示されるように、刺激素子11、12、…、1nは、4つが1つの刺激素子ユニットにまとめられる。すなわち運動教示装置3は、計8個の刺激素子ユニットを含む。
As shown in FIGS. 3 and 4, the exercise teaching device 3 is attached to the left and right thighs and the left and right lower legs of the user. The stimulating elements 11, 12, ..., 1n are composed of a total of 32 stimulating elements. That is, n = 32. As shown in FIG. 5, four stimulating elements 11, 12, ..., 1n are combined into one stimulating element unit. That is, the motion teaching device 3 includes a total of eight stimulating element units.
刺激素子ユニット50は、ほぼ正方形である。刺激素子ユニット50の四隅に、それぞれ刺激素子が配置される。図5には、刺激素子11、12、13及び14が刺激素子ユニット50にまとめられた状態が示されている。8個の刺激素子ユニットが、運動教示装置3に配置される。すなわち図3および図4に示されるように、刺激素子11、12、…、132は、3個の刺激素子ユニットがそれぞれ左右の大腿二頭筋および大腿四頭筋の表面に近接する皮膚の上に配置され、1個の刺激素子ユニットがそれぞれ左右の下腿部の平目筋の表面に近接する皮膚の上に配置される。
The stimulating element unit 50 is substantially square. Stimulating elements are arranged at the four corners of the stimulating element unit 50, respectively. FIG. 5 shows a state in which the stimulating elements 11, 12, 13 and 14 are grouped together in the stimulating element unit 50. Eight stimulating element units are arranged in the motion teaching device 3. That is, as shown in FIGS. 3 and 4, the stimulating elements 11, 12, ..., 132 are on the skin in which the three stimulating element units are close to the surfaces of the left and right biceps femoris and quadriceps muscles, respectively. One stimulator unit is placed on the skin close to the surface of the soleus muscle of the left and right thighs, respectively.
刺激素子11、12、…、132の各々は、直径20mm、厚さ5mmの円盤状である。刺激素子11、12、…、124は、硬すぎると体に馴染まず、刺激素子11、12、…、132のエッジが接触することによる痛みや、刺激素子11、12、…、132と衣服との間の滑りが生じやすくなる。逆に刺激素子11、12、…、132が柔らかすぎると、回転力を伝えにくくなる。これらの特徴を考慮し、刺激素子11、12、…、132の素材として、適切なクロロプレンゴムスポンジが使用されている。
Each of the stimulating elements 11, 12, ..., 132 has a disk shape with a diameter of 20 mm and a thickness of 5 mm. If the stimulating elements 11, 12, ..., 124 are too hard, they do not fit into the body, and the pain caused by the contact of the edges of the stimulating elements 11, 12, ..., 132, and the stimulating elements 11, 12, ..., 132 and clothes Sliding between is likely to occur. On the contrary, if the stimulating elements 11, 12, ..., 132 are too soft, it becomes difficult to transmit the rotational force. In consideration of these characteristics, an appropriate chloroprene rubber sponge is used as a material for the stimulating elements 11, 12, ..., 132.
刺激素子11、12、…、132を回転させるためのアクチュエータには、小型のサーボモーターが使用される。このサーボモーターの出力可能な最大のトルクは0.2N・mであるが、これは背部の皮膚を変形させるのに十分である。刺激素子11、12、…、132は、回転角度30度、回転速度60度/秒で回転するように制御される。
A small servo motor is used for the actuator for rotating the stimulating elements 11, 12, ..., 132. The maximum output torque of this servomotor is 0.2 Nm, which is sufficient to deform the skin on the back. The stimulating elements 11, 12, ..., 132 are controlled to rotate at a rotation angle of 30 degrees and a rotation speed of 60 degrees / sec.
本発明者は、刺激素子11、12、…、1nの回転角度および回転方向を適切に制御することにより、身体感覚を発生させる力学的分布を皮膚に形成できることを実験的に確かめた。この場合、回転角度だけでなく、当該回転角度に到達するまでの時間を制御のパラメータに含めてもよい。
The present inventor has experimentally confirmed that a mechanical distribution that generates a physical sensation can be formed on the skin by appropriately controlling the rotation angle and rotation direction of the stimulating elements 11, 12, ..., 1n. In this case, not only the rotation angle but also the time until the rotation angle is reached may be included in the control parameter.
本実施の形態によれば、ユーザの皮膚に回転運動による刺激を与え、当該回転の角度および方向を制御することにより、正確かつ効率的に身体運動を教示することができる。
According to the present embodiment, the body movement can be taught accurately and efficiently by stimulating the user's skin by rotational movement and controlling the angle and direction of the rotation.
[第4の実施の形態]
制御部30は、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転角度が大きくなるように刺激素子11、12、…、1nを制御してもよい。本発明者は、目的とする力覚の大きさ(すなわち運動に基づく活動等の強度)と、ひずみエネルギー密度とは正の相関を持つことが多いことを見出した。さらにひずみエネルギー密度と、刺激素子11、12、…、1nの回転角度ともまた正の相関を持つことも分かる。従って、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転角度が大きくなるように刺激素子11、12、…、1nを制御することにより、身体感覚を誘発することができる。 [Fourth Embodiment]
Thecontrol unit 30 may control the stimulating elements 11, 12, ..., 1n so that the larger the target force sense, the larger the rotation angle of the stimulating elements 11, 12, ..., 1n. The present inventor has found that the magnitude of the desired force sensation (that is, the intensity of activity based on motion) and the strain energy density often have a positive correlation. It can also be seen that the strain energy density and the rotation angles of the stimulating elements 11, 12, ..., 1n also have a positive correlation. Therefore, the larger the target force sense, the larger the rotation angle of the stimulating elements 11, 12, ..., 1n. By controlling the stimulating elements 11, 12, ..., 1n, the physical sensation is induced. be able to.
制御部30は、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転角度が大きくなるように刺激素子11、12、…、1nを制御してもよい。本発明者は、目的とする力覚の大きさ(すなわち運動に基づく活動等の強度)と、ひずみエネルギー密度とは正の相関を持つことが多いことを見出した。さらにひずみエネルギー密度と、刺激素子11、12、…、1nの回転角度ともまた正の相関を持つことも分かる。従って、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転角度が大きくなるように刺激素子11、12、…、1nを制御することにより、身体感覚を誘発することができる。 [Fourth Embodiment]
The
本実施の形態によれば、回転角度を大きくすることにより運動に基づく活動強度を増加させて、身体運動を教示することができる。
According to this embodiment, it is possible to teach physical exercise by increasing the activity intensity based on exercise by increasing the rotation angle.
[第5の実施の形態]
ある実施の形態では、回転運動によって皮膚に刺激を与える刺激素子11、12、…、1nを用いて、これらの刺激素子の回転速度および回転方向を適切に制御することにより、身体感覚を発生させる力学的分布を皮膚に形成してもよい。この場合、回転速度だけでなく、当該回転速度に到達するまでの時間を制御のパラメータに含めてもよい。 [Fifth Embodiment]
In one embodiment, stimulating elements 11, 12, ..., 1n that stimulate the skin by rotational movement are used to appropriately control the rotational speed and rotational direction of these stimulating elements to generate physical sensations. A mechanical distribution may be formed on the skin. In this case, not only the rotation speed but also the time until the rotation speed is reached may be included in the control parameter.
ある実施の形態では、回転運動によって皮膚に刺激を与える刺激素子11、12、…、1nを用いて、これらの刺激素子の回転速度および回転方向を適切に制御することにより、身体感覚を発生させる力学的分布を皮膚に形成してもよい。この場合、回転速度だけでなく、当該回転速度に到達するまでの時間を制御のパラメータに含めてもよい。 [Fifth Embodiment]
In one embodiment, stimulating
本実施の形態によれば、ユーザの皮膚に回転運動による刺激を与え、当該回転の速度および方向を制御することにより、正確かつ効率的に身体運動を教示することができる。
According to the present embodiment, the body movement can be taught accurately and efficiently by stimulating the user's skin by rotational movement and controlling the speed and direction of the rotation.
[第6の実施の形態]
制御部30は、目的とする力覚(すなわち運動に基づく活動等の強度)が大きければ大きいほど、刺激素子11、12、…、1nの回転速度が大きくなるように刺激素子11、12、…、1nを制御してもよい。ひずみエネルギー密度は、刺激素子11、12、…、1nの回転速度と正の相関を持つことも分かる。従って、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転速度が大きくなるように刺激素子11、12、…、1nを制御することにより、身体感覚を誘発することができる。 [Sixth Embodiment]
Thecontrol unit 30 increases the target force sense (that is, the intensity of the activity based on the movement), the stimulation elements 11, 12, ..., The stimulation elements 11, 12, ... 1n may be controlled. It can also be seen that the strain energy density has a positive correlation with the rotational speeds of the stimulating elements 11, 12, ..., 1n. Therefore, the greater the target force sensation, the greater the rotational speed of the stimulating elements 11, 12, ..., 1n. By controlling the stimulating elements 11, 12, ..., 1n, the physical sensation is induced. be able to.
制御部30は、目的とする力覚(すなわち運動に基づく活動等の強度)が大きければ大きいほど、刺激素子11、12、…、1nの回転速度が大きくなるように刺激素子11、12、…、1nを制御してもよい。ひずみエネルギー密度は、刺激素子11、12、…、1nの回転速度と正の相関を持つことも分かる。従って、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転速度が大きくなるように刺激素子11、12、…、1nを制御することにより、身体感覚を誘発することができる。 [Sixth Embodiment]
The
本実施の形態によれば、回転速度を大きくすることにより運動に基づく活動強度を増加させて、身体運動を教示することができる。
According to this embodiment, it is possible to teach physical exercise by increasing the activity intensity based on exercise by increasing the rotation speed.
[第7の実施の形態]
ある実施の形態では、回転運動によって皮膚に刺激を与える刺激素子11、12、…、1nを用いて、これらの刺激素子の回転トルクおよび回転方向を適切に制御することにより、身体感覚を発生させる力学的分布を皮膚に形成してもよい。この場合、回転トルクだけでなく、当該回転トルクに到達するまでの時間を制御のパラメータに含めてもよい。 [7th Embodiment]
In one embodiment, stimulating elements 11, 12, ..., 1n that stimulate the skin by rotational movement are used to appropriately control the rotational torque and rotational direction of these stimulating elements to generate bodily sensations. A mechanical distribution may be formed on the skin. In this case, not only the rotational torque but also the time until the rotational torque is reached may be included in the control parameters.
ある実施の形態では、回転運動によって皮膚に刺激を与える刺激素子11、12、…、1nを用いて、これらの刺激素子の回転トルクおよび回転方向を適切に制御することにより、身体感覚を発生させる力学的分布を皮膚に形成してもよい。この場合、回転トルクだけでなく、当該回転トルクに到達するまでの時間を制御のパラメータに含めてもよい。 [7th Embodiment]
In one embodiment, stimulating
本実施の形態によれば、ユーザの皮膚に回転運動による刺激を与え、当該回転のトルクおよび方向を制御することにより、正確かつ効率的に身体運動を教示することができる。
According to the present embodiment, the body movement can be taught accurately and efficiently by stimulating the user's skin by rotational movement and controlling the torque and direction of the rotation.
[第8の実施の形態]
制御部30は、目的とする力覚(すなわち運動に基づく活動等の強度)が大きければ大きいほど、刺激素子11、12、…、1nの回転トルクが大きくなるように刺激素子11、12、…、1nを制御してもよい。ひずみエネルギー密度は、刺激素子11、12、…、1nの回転トルクと正の相関を持つことも分かる。従って、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転トルクが大きくなるように刺激素子11、12、…、1nを制御することにより、身体感覚を誘発することができる。特に、運動教示装置3を装着したユーザが運動したとき、刺激電極とユーザの皮膚とがずれたり滑ったりすることがある。こうした場合に回転角度や回転速度を基に制御を行うと、制御が不正確となる。これに対し回転トルクを基に制御を行えば、ユーザが運動して刺激電極とユーザの皮膚とがずれたり滑ったりしても、正確な制御が可能となる。 [Eighth Embodiment]
Thecontrol unit 30 increases the rotational torque of the stimulating elements 11, 12, ..., The greater the target force sense (that is, the intensity of the activity based on the movement), the greater the stimulating elements 11, 12, ... 1n may be controlled. It can also be seen that the strain energy density has a positive correlation with the rotational torque of the stimulating elements 11, 12, ..., 1n. Therefore, the larger the target force sense, the larger the rotational torque of the stimulating elements 11, 12, ..., 1n. By controlling the stimulating elements 11, 12, ..., 1n, the physical sensation is induced. be able to. In particular, when the user wearing the exercise teaching device 3 exercises, the stimulation electrode and the user's skin may slip or slip. In such a case, if the control is performed based on the rotation angle and the rotation speed, the control becomes inaccurate. On the other hand, if control is performed based on the rotational torque, accurate control is possible even if the user moves and the stimulation electrode and the user's skin slip or slip.
制御部30は、目的とする力覚(すなわち運動に基づく活動等の強度)が大きければ大きいほど、刺激素子11、12、…、1nの回転トルクが大きくなるように刺激素子11、12、…、1nを制御してもよい。ひずみエネルギー密度は、刺激素子11、12、…、1nの回転トルクと正の相関を持つことも分かる。従って、目的とする力覚が大きければ大きいほど、刺激素子11、12、…、1nの回転トルクが大きくなるように刺激素子11、12、…、1nを制御することにより、身体感覚を誘発することができる。特に、運動教示装置3を装着したユーザが運動したとき、刺激電極とユーザの皮膚とがずれたり滑ったりすることがある。こうした場合に回転角度や回転速度を基に制御を行うと、制御が不正確となる。これに対し回転トルクを基に制御を行えば、ユーザが運動して刺激電極とユーザの皮膚とがずれたり滑ったりしても、正確な制御が可能となる。 [Eighth Embodiment]
The
本実施の形態によれば、回転トルクを大きくすることにより運動に基づく活動強度を増加させて、身体運動を教示することができる。
According to this embodiment, it is possible to teach physical exercise by increasing the activity intensity based on exercise by increasing the rotational torque.
第4、第6、第8の実施の形態では、目的とする力覚(すなわち運動に基づく活動等の強度)と、刺激素子の回転角度、回転速度、回転トルク(すなわち刺激強度)との間に正の相関があることを利用して制御を行った。図6に、このような運動に基づく活動等の強度と、刺激強度との間の正の相関の例を示す。
In the fourth, sixth, and eighth embodiments, between the target force sense (that is, the intensity of activity based on movement) and the rotation angle, rotation speed, and rotation torque (that is, stimulation intensity) of the stimulating element. Control was performed by utilizing the fact that there is a positive correlation between. FIG. 6 shows an example of a positive correlation between the intensity of such exercise-based activities and the stimulus intensity.
[第9の実施の形態]
図1および2において、隣接する刺激素子間の間隔は、当該隣接する刺激素子によって提示される力覚の範囲が重なりを持つような間隔であってよい。本発明者は、隣接する刺激素子間の間隔をこのように設けることによって、空間的に連続な力覚をより確実に提示できることを見出した。 [9th embodiment]
In FIGS. 1 and 2, the spacing between adjacent stimulating elements may be such that the ranges of force sense presented by the adjacent stimulating elements overlap. The present inventor has found that spatially continuous force sensation can be more reliably presented by providing such an interval between adjacent stimulating elements.
図1および2において、隣接する刺激素子間の間隔は、当該隣接する刺激素子によって提示される力覚の範囲が重なりを持つような間隔であってよい。本発明者は、隣接する刺激素子間の間隔をこのように設けることによって、空間的に連続な力覚をより確実に提示できることを見出した。 [9th embodiment]
In FIGS. 1 and 2, the spacing between adjacent stimulating elements may be such that the ranges of force sense presented by the adjacent stimulating elements overlap. The present inventor has found that spatially continuous force sensation can be more reliably presented by providing such an interval between adjacent stimulating elements.
[第10の実施の形態]
前述の実施の形態では、刺激素子はユーザの大腿部、下腿部の筋肉の表面に近接する皮膚の上に配置された。しかしこれに限られず、刺激素子は、ユーザの上腕部、前腕部、手首、手指、足首、足指、首、胴体、腰部など、運動を司る筋肉が近傍にある任意の部位に配置されてよい。本実施の形態によれば、ユーザの身体部位への適用範囲を広げることができる。 [10th Embodiment]
In the aforementioned embodiment, the stimulator was placed on the skin close to the surface of the muscles of the user's thighs and lower legs. However, the stimulating element is not limited to this, and the stimulating element may be placed at any site in the vicinity of the muscles that control movement, such as the user's upper arm, forearm, wrist, finger, ankle, toe, neck, torso, and lumbar region. .. According to this embodiment, the range of application to the body part of the user can be expanded.
前述の実施の形態では、刺激素子はユーザの大腿部、下腿部の筋肉の表面に近接する皮膚の上に配置された。しかしこれに限られず、刺激素子は、ユーザの上腕部、前腕部、手首、手指、足首、足指、首、胴体、腰部など、運動を司る筋肉が近傍にある任意の部位に配置されてよい。本実施の形態によれば、ユーザの身体部位への適用範囲を広げることができる。 [10th Embodiment]
In the aforementioned embodiment, the stimulator was placed on the skin close to the surface of the muscles of the user's thighs and lower legs. However, the stimulating element is not limited to this, and the stimulating element may be placed at any site in the vicinity of the muscles that control movement, such as the user's upper arm, forearm, wrist, finger, ankle, toe, neck, torso, and lumbar region. .. According to this embodiment, the range of application to the body part of the user can be expanded.
[第11の実施の形態]
刺激素子は、回転運動に加えて、電気刺激によって皮膚に刺激を与えてもよい。すなわち刺激素子は、回転運動刺激と電気刺激とを組み合わせて、よりリアルな身体運動の感覚を発生させる力覚を皮膚上に形成する。本実施の形態によれば、的確に身体運動を教示することができる。 [Eleventh Embodiment]
The stimulating element may stimulate the skin by electrical stimulation in addition to rotational movement. That is, the stimulating element combines rotational motion stimulus and electrical stimulus to form a force sensation on the skin that generates a more realistic sensation of physical motion. According to this embodiment, it is possible to accurately teach physical exercise.
刺激素子は、回転運動に加えて、電気刺激によって皮膚に刺激を与えてもよい。すなわち刺激素子は、回転運動刺激と電気刺激とを組み合わせて、よりリアルな身体運動の感覚を発生させる力覚を皮膚上に形成する。本実施の形態によれば、的確に身体運動を教示することができる。 [Eleventh Embodiment]
The stimulating element may stimulate the skin by electrical stimulation in addition to rotational movement. That is, the stimulating element combines rotational motion stimulus and electrical stimulus to form a force sensation on the skin that generates a more realistic sensation of physical motion. According to this embodiment, it is possible to accurately teach physical exercise.
[第12の実施の形態]
図7に、第12の実施の形態に係る運動教示システム4の機能ブロックを示す。運動教示システム4は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、を備える。動作教示者運動計測装置60は、動作教示者の身体運動情報をリアルタイムに計測する。身体運動情報取得部20は、動作教示者運動計測装置60から、動作教示者の身体運動の情報を取得する。動作教示者運動計測装置60は、例えば動作教示者の身体の様々な部位に取り付けられた生体センサである。制御部30は、身体運動情報取得部20が時々刻々と取得する動作教示者の身体運動情報に基づいて、ユーザの皮膚に力学的分布を形成する。これにより、ユーザは、手本とする動作教示者の身体運動をリアルタイムに習得することができる。なお、運動教示システム4は、運動教示装置1を備える例を説明したが、これに限られず、運動教示装置は、前述の実施の形態のいずれのものであってもよい。 [Twelfth Embodiment]
FIG. 7 shows a functional block of theexercise teaching system 4 according to the twelfth embodiment. The motion teaching system 4 includes a motion teaching device 1 according to the first embodiment and a motion instructor motion measuring device 60. The motion instructor motion measuring device 60 measures the body motion information of the motion instructor in real time. The body movement information acquisition unit 20 acquires information on the body movement of the movement instructor from the movement instructor movement measuring device 60. The motion instructor motion measuring device 60 is, for example, a biosensor attached to various parts of the body of the motion instructor. The control unit 30 forms a mechanical distribution on the user's skin based on the body movement information of the motion instructor that the body movement information acquisition unit 20 acquires from moment to moment. As a result, the user can learn the physical exercise of the motion instructor as a model in real time. Although the motion teaching system 4 has described an example including the motion teaching device 1, the motion teaching device is not limited to this, and the motion teaching device may be any of the above-described embodiments.
図7に、第12の実施の形態に係る運動教示システム4の機能ブロックを示す。運動教示システム4は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、を備える。動作教示者運動計測装置60は、動作教示者の身体運動情報をリアルタイムに計測する。身体運動情報取得部20は、動作教示者運動計測装置60から、動作教示者の身体運動の情報を取得する。動作教示者運動計測装置60は、例えば動作教示者の身体の様々な部位に取り付けられた生体センサである。制御部30は、身体運動情報取得部20が時々刻々と取得する動作教示者の身体運動情報に基づいて、ユーザの皮膚に力学的分布を形成する。これにより、ユーザは、手本とする動作教示者の身体運動をリアルタイムに習得することができる。なお、運動教示システム4は、運動教示装置1を備える例を説明したが、これに限られず、運動教示装置は、前述の実施の形態のいずれのものであってもよい。 [Twelfth Embodiment]
FIG. 7 shows a functional block of the
[第13の実施の形態]
動作教示者の身体運動情報は、動作教示者の筋電位、筋張力、皮膚変形などを含んでもよい。この場合、動作教示者運動計測装置60は、筋電位センサ、筋力測定装置、皮膚ひずみ測定装置などを含む。本実施の形態によれば、多様な生体情報から動作教示者の身体運動情報を取得することができる。 [13th Embodiment]
The physical motion information of the motion instructor may include the myoelectric potential, muscle tension, skin deformation, etc. of the motion instructor. In this case, the motion instructormotion measuring device 60 includes a myoelectric potential sensor, a muscle strength measuring device, a skin strain measuring device, and the like. According to this embodiment, it is possible to acquire the body movement information of the motion instructor from various biological information.
動作教示者の身体運動情報は、動作教示者の筋電位、筋張力、皮膚変形などを含んでもよい。この場合、動作教示者運動計測装置60は、筋電位センサ、筋力測定装置、皮膚ひずみ測定装置などを含む。本実施の形態によれば、多様な生体情報から動作教示者の身体運動情報を取得することができる。 [13th Embodiment]
The physical motion information of the motion instructor may include the myoelectric potential, muscle tension, skin deformation, etc. of the motion instructor. In this case, the motion instructor
[第14の実施の形態]
図8に、第14の実施の形態に係る運動教示システム5の機能ブロックを示す。運動教示システム5は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、ユーザ運動計測装置70と、を備える。ユーザ運動計測装置70は、ユーザの身体運動情報をリアルタイムに計測する。身体運動情報取得部20は、動作教示者運動計測装置60が計測した動作教示者の身体運動情報と、ユーザ運動計測装置70が計測したユーザの身体運動情報との差異に基づいて、刺激素子11、12、…、1nを制御する。ユーザ運動計測装置70は、例えばユーザの身体の様々な部位に取り付けられた生体センサである。 [14th Embodiment]
FIG. 8 shows a functional block of theexercise teaching system 5 according to the fourteenth embodiment. The motion teaching system 5 includes a motion teaching device 1 according to the first embodiment, a motion instructor motion measuring device 60, and a user motion measuring device 70. The user motion measuring device 70 measures the user's physical motion information in real time. The body movement information acquisition unit 20 is a stimulus element 11 based on the difference between the body movement information of the movement teacher measured by the movement teacher movement measuring device 60 and the body movement information of the user measured by the user movement measuring device 70. , 12, ..., 1n is controlled. The user motion measuring device 70 is, for example, a biosensor attached to various parts of the user's body.
図8に、第14の実施の形態に係る運動教示システム5の機能ブロックを示す。運動教示システム5は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、ユーザ運動計測装置70と、を備える。ユーザ運動計測装置70は、ユーザの身体運動情報をリアルタイムに計測する。身体運動情報取得部20は、動作教示者運動計測装置60が計測した動作教示者の身体運動情報と、ユーザ運動計測装置70が計測したユーザの身体運動情報との差異に基づいて、刺激素子11、12、…、1nを制御する。ユーザ運動計測装置70は、例えばユーザの身体の様々な部位に取り付けられた生体センサである。 [14th Embodiment]
FIG. 8 shows a functional block of the
ユーザが未熟であればあるほど、ユーザの身体運動と動作教示者の身体運動との差異は大きい。この差異をリアルタイムに計測し、当該差異に基づいて刺激素子を制御することにより、ユーザの身体運動を修正し、理想的な身体運動に近づけることができる。本実施の形態では、制御部30は、時々刻々と変化する動作教示者とユーザの身体運動の差異に基づいて、ユーザの皮膚に力学的分布を形成する。これによりユーザは、手本とする動作教示者の身体運動に対して自身の身体運動を修正しながら、目標とする身体運動を習得することができる。なお、運動教示システム5は、運動教示装置1を備える例を説明したが、これに限られず、運動教示装置は、前述の実施の形態のいずれのものであってもよい。
The more immature the user, the greater the difference between the physical exercise of the user and the physical exercise of the motion instructor. By measuring this difference in real time and controlling the stimulating element based on the difference, it is possible to correct the physical movement of the user and bring it closer to the ideal physical movement. In the present embodiment, the control unit 30 forms a mechanical distribution on the skin of the user based on the difference in physical movement between the motion teacher and the user, which changes from moment to moment. As a result, the user can acquire the target physical exercise while modifying his / her own physical exercise with respect to the physical exercise of the motion instructor as a model. Although the motion teaching system 5 has described an example including the motion teaching device 1, the motion teaching device is not limited to this, and the motion teaching device may be any of the above-described embodiments.
[第15の実施の形態]
制御部30は、動作教示者運動計測装置60が計測した動作教示者の身体運動情報と、ユーザ運動計測装置70が計測したユーザの身体運動情報との差異が小さくなるように、ユーザが筋活動を増大させる力覚を発生させる力学的分布を皮膚に形成するように刺激素子11、12、…、1nを制御する。すなわち、制御部30は、ユーザの身体運動を動作教示者の身体運動に近づけるために、ユーザがより強くまたはより速く筋肉を動かすような身体感覚を発生させる力学的分布を、ユーザの皮膚に形成する。これによりユーザは、手本とする動作教示者の身体運動に対して、より強くまたはより速く筋肉を動かすように自身の身体運動を修正することにより、目標とする身体運動を習得することができる。 [Fifteenth Embodiment]
Thecontrol unit 30 allows the user to perform muscle activity so that the difference between the physical motion information of the motion instructor measured by the motion instructor motion measuring device 60 and the physical motion information of the user measured by the user motion measuring device 70 becomes small. The stimulating elements 11, 12, ..., 1n are controlled so as to form a mechanical distribution on the skin that generates a force sensation. That is, the control unit 30 forms a mechanical distribution on the user's skin that generates a physical sensation that causes the user to move muscles stronger or faster in order to bring the user's physical movement closer to that of the motion teacher. do. This allows the user to master the target physical movement by modifying his or her physical movement to move the muscles stronger or faster with respect to the physical movement of the model motion teacher. ..
制御部30は、動作教示者運動計測装置60が計測した動作教示者の身体運動情報と、ユーザ運動計測装置70が計測したユーザの身体運動情報との差異が小さくなるように、ユーザが筋活動を増大させる力覚を発生させる力学的分布を皮膚に形成するように刺激素子11、12、…、1nを制御する。すなわち、制御部30は、ユーザの身体運動を動作教示者の身体運動に近づけるために、ユーザがより強くまたはより速く筋肉を動かすような身体感覚を発生させる力学的分布を、ユーザの皮膚に形成する。これによりユーザは、手本とする動作教示者の身体運動に対して、より強くまたはより速く筋肉を動かすように自身の身体運動を修正することにより、目標とする身体運動を習得することができる。 [Fifteenth Embodiment]
The
[第16の実施の形態]
制御部30は、動作教示者運動計測装置60が計測した動作教示者の身体運動情報と、ユーザ運動計測装置70が計測したユーザの身体運動情報との差異が小さくなるように、ユーザが筋活動を静止させる力覚を発生させる力学的分布を皮膚に形成するように刺激素子11、12、…、1nを制御する。すなわち、制御部30は、ユーザの身体運動を動作教示者の身体運動に近づけるために、ユーザが現在運動させている筋肉を静止させるような身体感覚を発生させる力学的分布を、ユーザの皮膚に形成する。これによりユーザは、手本とする動作教示者の身体運動に対して、筋肉を静止させるように自身の身体運動を修正することにより、目標とする身体運動を習得することができる。 [16th Embodiment]
Thecontrol unit 30 allows the user to perform muscle activity so that the difference between the physical motion information of the motion instructor measured by the motion instructor motion measuring device 60 and the physical motion information of the user measured by the user motion measuring device 70 becomes small. The stimulating elements 11, 12, ..., 1n are controlled so as to form a mechanical distribution on the skin that generates a force sensation that causes the body to rest. That is, in order to bring the user's physical movement closer to the physical movement of the motion instructor, the control unit 30 applies a mechanical distribution on the user's skin to generate a physical sensation that causes the muscle currently being exercised by the user to stand still. Form. As a result, the user can acquire the target physical movement by modifying his / her own physical movement so as to keep the muscles stationary with respect to the physical movement of the motion instructor as a model.
制御部30は、動作教示者運動計測装置60が計測した動作教示者の身体運動情報と、ユーザ運動計測装置70が計測したユーザの身体運動情報との差異が小さくなるように、ユーザが筋活動を静止させる力覚を発生させる力学的分布を皮膚に形成するように刺激素子11、12、…、1nを制御する。すなわち、制御部30は、ユーザの身体運動を動作教示者の身体運動に近づけるために、ユーザが現在運動させている筋肉を静止させるような身体感覚を発生させる力学的分布を、ユーザの皮膚に形成する。これによりユーザは、手本とする動作教示者の身体運動に対して、筋肉を静止させるように自身の身体運動を修正することにより、目標とする身体運動を習得することができる。 [16th Embodiment]
The
[第17の実施の形態]
図9に、第17の実施の形態に係る運動教示システム6の機能ブロックを示す。運動教示システム6は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、学習部80と、力学的分布推定部21と、を備える。学習部80は、2つの動作モード、すなわち第1の動作モードと、第2の動作モードと、を持つ。ここで、第1の動作モードは学習モードであり、第2の動作モードは制御モードである。学習モードにおいては、学習部80は、動作教示者の身体運動情報と、力学的分布推定部21が身体運動の情報から推定した動作教示者の皮膚の力学的分布と、を学習データとして大量に機械学習する。力学的分布は、動作教示者運動計測装置として筋電センサなどを用いて直接観測してもよいし、皮膚の変形の状況から有限要素法などで推定することもできる。一方制御モードにおいては、学習部80は、身体運動情報取得部20が動作教示者運動計測装置60から取得した動作教示者の身体運動情報が入力されると、学習結果に基づき推定された力学的分布を制御部30に出力する。制御部30は、ユーザの皮膚上の各刺激素子を制御して前記力学的分布をユーザの皮膚に形成し、ユーザに動作教示者の身体感覚を誘発させる。力学的分布から各刺激素子の制御量への変換は、両者の関係を事前にテーブル化したものを用いて行う。 [17th Embodiment]
FIG. 9 shows a functional block of theexercise teaching system 6 according to the 17th embodiment. The motion teaching system 6 includes a motion teaching device 1 according to the first embodiment, a motion teacher motion measuring device 60, a learning unit 80, and a mechanical distribution estimation unit 21. The learning unit 80 has two operation modes, that is, a first operation mode and a second operation mode. Here, the first operation mode is the learning mode, and the second operation mode is the control mode. In the learning mode, the learning unit 80 uses a large amount of physical motion information of the motion instructor and the mechanical distribution of the skin of the motion instructor estimated by the mechanical distribution estimation unit 21 from the physical motion information as learning data. Machine learning. The mechanical distribution may be directly observed using a myoelectric sensor or the like as a motion instructor motion measuring device, or may be estimated by a finite element method or the like from the state of skin deformation. On the other hand, in the control mode, the learning unit 80 is mechanically estimated based on the learning result when the body movement information of the movement teacher acquired by the body movement information acquisition unit 20 from the movement teacher movement measuring device 60 is input. The distribution is output to the control unit 30. The control unit 30 controls each stimulating element on the user's skin to form the mechanical distribution on the user's skin, and induces the user to have a physical sensation of the motion instructor. The conversion from the mechanical distribution to the controlled variable of each stimulus element is performed using a table in which the relationship between the two is previously tabulated.
図9に、第17の実施の形態に係る運動教示システム6の機能ブロックを示す。運動教示システム6は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、学習部80と、力学的分布推定部21と、を備える。学習部80は、2つの動作モード、すなわち第1の動作モードと、第2の動作モードと、を持つ。ここで、第1の動作モードは学習モードであり、第2の動作モードは制御モードである。学習モードにおいては、学習部80は、動作教示者の身体運動情報と、力学的分布推定部21が身体運動の情報から推定した動作教示者の皮膚の力学的分布と、を学習データとして大量に機械学習する。力学的分布は、動作教示者運動計測装置として筋電センサなどを用いて直接観測してもよいし、皮膚の変形の状況から有限要素法などで推定することもできる。一方制御モードにおいては、学習部80は、身体運動情報取得部20が動作教示者運動計測装置60から取得した動作教示者の身体運動情報が入力されると、学習結果に基づき推定された力学的分布を制御部30に出力する。制御部30は、ユーザの皮膚上の各刺激素子を制御して前記力学的分布をユーザの皮膚に形成し、ユーザに動作教示者の身体感覚を誘発させる。力学的分布から各刺激素子の制御量への変換は、両者の関係を事前にテーブル化したものを用いて行う。 [17th Embodiment]
FIG. 9 shows a functional block of the
機械学習は、既知のAIにより行われてよい。AIの具体的な手法は特に限定されないが、例えば畳み込みニューラルネットワーク(Convolutional Neural Network:CNN)、再帰形ニューラルネットワーク(Recurrent Neural Network:RNN)、LSTMネットワーク(Long Short Term Memory:LSTM)などのニューラルネットワークを用いてもよく、この場合入力層を共通にした上で計算モデルごとに異なるニューラルネットワークを混在させてもよい。本実施の形態では、提示された力覚と当該力覚を発生させる力学的分布との組を大量に用意し、これらを学習データとしてAIに学習させる。これによりAIは、動作教示者の身体運動情報が入力されたときに、目的とする力覚を発生させる力学的分布を出力することができる。
Machine learning may be performed by a known AI. The specific method of AI is not particularly limited, but for example, a convolutional neural network (CNN), a recursive neural network (RNN), an LSTM network (Long Short Term Memory), etc. In this case, different neural networks may be mixed for each calculation model after sharing the input layer. In the present embodiment, a large number of pairs of the presented force sense and the mechanical distribution that generates the force sense are prepared, and AI is made to learn these as learning data. As a result, the AI can output a mechanical distribution that generates a desired force sensation when the body movement information of the motion instructor is input.
本実施の形態によれば、機械学習を用いることにより、動作教示者の身体運動情報から高い精度で目的とする力覚を発生させる力学的分布を推定することができる。
According to this embodiment, by using machine learning, it is possible to estimate the mechanical distribution that generates the desired force sensation with high accuracy from the body movement information of the motion instructor.
[第18の実施の形態]
図10に、第18の実施の形態に係る運動教示システム7の機能ブロックを示す。運動教示システム7は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、カメラ90と、表示装置92と、を備える。カメラ90は、動作教示者の身体運動を撮影する。表示装置92は、カメラ90で撮影された画像をユーザに対して表示するウェアラブルな表示装置である。カメラ90は、例えばハイビジョンカメラやステレオカメラであってよい。表示装置92は、例えばHMD(ヘッドマウントディスプレイ)であってよい。本実施の形態によれば、刺激素子11、12、…、1nによる皮膚刺激と、表示装置92による視覚刺激を組み合わせて使うことにより、より高い臨場感で身体感覚を教示することができる。 [18th Embodiment]
FIG. 10 shows a functional block of the exercise teaching system 7 according to the eighteenth embodiment. The motion teaching system 7 includes amotion teaching device 1 according to the first embodiment, a motion instructor motion measuring device 60, a camera 90, and a display device 92. The camera 90 captures the physical movement of the motion instructor. The display device 92 is a wearable display device that displays an image taken by the camera 90 to the user. The camera 90 may be, for example, a high-definition camera or a stereo camera. The display device 92 may be, for example, an HMD (head-mounted display). According to the present embodiment, by using the skin stimulation by the stimulating elements 11, 12, ..., 1n and the visual stimulation by the display device 92 in combination, it is possible to teach the physical sensation with a higher sense of presence.
図10に、第18の実施の形態に係る運動教示システム7の機能ブロックを示す。運動教示システム7は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、カメラ90と、表示装置92と、を備える。カメラ90は、動作教示者の身体運動を撮影する。表示装置92は、カメラ90で撮影された画像をユーザに対して表示するウェアラブルな表示装置である。カメラ90は、例えばハイビジョンカメラやステレオカメラであってよい。表示装置92は、例えばHMD(ヘッドマウントディスプレイ)であってよい。本実施の形態によれば、刺激素子11、12、…、1nによる皮膚刺激と、表示装置92による視覚刺激を組み合わせて使うことにより、より高い臨場感で身体感覚を教示することができる。 [18th Embodiment]
FIG. 10 shows a functional block of the exercise teaching system 7 according to the eighteenth embodiment. The motion teaching system 7 includes a
[第19の実施の形態]
図11に、第19の実施の形態に係る運動教示システム8の機能ブロックを示す。運動教示システム8は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、マイクロフォン94と、再生装置96と、を備える。マイクロフォン94は、動作教示者の身体運動に伴う音声を収録する。再生装置96は、マイクロフォン94で収録された音声をユーザに対して再生するウェアラブルな再生装置である。マイクロフォン94は、例えばバイノーラルマイクなどのステレオマイクであってよい。再生装置96は、例えばヘッドフォンであってよい。本実施の形態によれば、刺激素子11、12、…、1nによる皮膚刺激と、再生装置96による聴覚刺激を組み合わせて使うことにより、より高い臨場感で身体感覚を教示することができる。 [19th Embodiment]
FIG. 11 shows a functional block of theexercise teaching system 8 according to the nineteenth embodiment. The motion teaching system 8 includes a motion teaching device 1 according to the first embodiment, a motion instructor motion measuring device 60, a microphone 94, and a reproduction device 96. The microphone 94 records the voice accompanying the physical exercise of the motion instructor. The reproduction device 96 is a wearable reproduction device that reproduces the voice recorded by the microphone 94 to the user. The microphone 94 may be a stereo microphone such as a binaural microphone. The playback device 96 may be, for example, headphones. According to the present embodiment, by using the skin stimulation by the stimulating elements 11, 12, ..., 1n and the auditory stimulation by the regenerating device 96 in combination, it is possible to teach the physical sensation with a higher sense of presence.
図11に、第19の実施の形態に係る運動教示システム8の機能ブロックを示す。運動教示システム8は、第1の実施の形態に係る運動教示装置1と、動作教示者運動計測装置60と、マイクロフォン94と、再生装置96と、を備える。マイクロフォン94は、動作教示者の身体運動に伴う音声を収録する。再生装置96は、マイクロフォン94で収録された音声をユーザに対して再生するウェアラブルな再生装置である。マイクロフォン94は、例えばバイノーラルマイクなどのステレオマイクであってよい。再生装置96は、例えばヘッドフォンであってよい。本実施の形態によれば、刺激素子11、12、…、1nによる皮膚刺激と、再生装置96による聴覚刺激を組み合わせて使うことにより、より高い臨場感で身体感覚を教示することができる。 [19th Embodiment]
FIG. 11 shows a functional block of the
[第20の実施の形態]
図12に、第20の実施の形態に係る運動教示方法の処理フローを示す。この運動教示方法は、動作教示者の身体運動の情報を取得するステップS1と、ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、当該ユーザの筋肉の表面に近接する皮膚に刺激を与えるステップS2と、を備える。複数の刺激素子は、身体運動情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成する。 隣接する前記刺激素子間の間隔は、空間的に連続な力覚を教示可能な間隔である。力覚は、ユーザに動作教示者が身体運動を行っているときの身体感覚を誘発させる。 [20th Embodiment]
FIG. 12 shows a processing flow of the exercise teaching method according to the twentieth embodiment. This motion teaching method uses step S1 to acquire information on the body movement of the motion instructor and a plurality of stimulating elements arranged on the skin close to the surface of the user's muscle, and the surface of the user's muscle. The step S2, which stimulates the skin in the vicinity of the skin, is provided. The plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on body movement information. The interval between the adjacent stimulating elements is an interval capable of teaching a spatially continuous force sense. Force sensation induces the user to feel the physical sensation when the motion instructor is performing physical exercise.
図12に、第20の実施の形態に係る運動教示方法の処理フローを示す。この運動教示方法は、動作教示者の身体運動の情報を取得するステップS1と、ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、当該ユーザの筋肉の表面に近接する皮膚に刺激を与えるステップS2と、を備える。複数の刺激素子は、身体運動情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成する。 隣接する前記刺激素子間の間隔は、空間的に連続な力覚を教示可能な間隔である。力覚は、ユーザに動作教示者が身体運動を行っているときの身体感覚を誘発させる。 [20th Embodiment]
FIG. 12 shows a processing flow of the exercise teaching method according to the twentieth embodiment. This motion teaching method uses step S1 to acquire information on the body movement of the motion instructor and a plurality of stimulating elements arranged on the skin close to the surface of the user's muscle, and the surface of the user's muscle. The step S2, which stimulates the skin in the vicinity of the skin, is provided. The plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on body movement information. The interval between the adjacent stimulating elements is an interval capable of teaching a spatially continuous force sense. Force sensation induces the user to feel the physical sensation when the motion instructor is performing physical exercise.
ステップS1で、本運動教示方法は、動作教示者の身体運動の情報を取得する。動作教示者の身体運動とは、動作教示者が技を披露するときの筋肉の運動であり、ユーザの手本となるものである。ステップS1では、記憶装置等に予め記憶された情報を取得してもよいし、動作教示者の実際の身体運動をリアルタイムに取得してもよい。
In step S1, this exercise teaching method acquires information on the physical exercise of the motion instructor. The physical exercise of the motion instructor is the exercise of the muscles when the motion instructor performs the technique, and serves as a model for the user. In step S1, the information stored in advance in the storage device or the like may be acquired, or the actual physical exercise of the motion instructor may be acquired in real time.
ステップS2で、本運動教示方法は、ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、当該ユーザの筋肉の表面に近接する皮膚に刺激を与える。刺激素子が皮膚に刺激を与える方法は、回転運動、せん断方向への引っ張り、圧迫、吸引などの力学的方法であってよい。刺激素子は、各々が単体で力覚を提示できるものであってもよい。あるいは、複数の刺激が共同して所定の力学的分布を形成することによって初めて力覚を提示できるものであってもよい。
In step S2, this exercise teaching method stimulates the skin close to the surface of the user's muscle by using a plurality of stimulating elements arranged on the skin close to the surface of the user's muscle. The method of stimulating the skin by the stimulating element may be a mechanical method such as rotational movement, pulling in the shear direction, compression, or suction. Each stimulating element may be capable of presenting a sense of force by itself. Alternatively, it may be possible to present a sense of force only when a plurality of stimuli jointly form a predetermined mechanical distribution.
隣接する刺激素子間の間隔は、空間的に連続な力覚を提示可能な間隔である。刺激素子間の間隔が離れすぎていると、力覚が空間的に不連続となってしまう。この場合、目的とする力覚を発生させる力学的分布を皮膚に形成することができない。隣接する刺激素子間の間隔は、例えば、当該隣接する刺激素子によって提示される力覚の範囲が重なりを持つような間隔であってよい。あるいは、隣接する刺激素子間の間隔は、当該皮膚の領域における二点弁別閾の範囲内にある間隔であってもよい。
The interval between adjacent stimulating elements is an interval that can present a spatially continuous force sense. If the distance between the stimulating elements is too large, the force sense becomes spatially discontinuous. In this case, it is not possible to form a mechanical distribution on the skin that produces the desired force sensation. The spacing between adjacent stimulating elements may be, for example, such that the ranges of force sense presented by the adjacent stimulating elements overlap. Alternatively, the spacing between adjacent stimulating elements may be within the range of the two-point discrimination threshold in the area of the skin.
力覚は、ユーザに動作教示者が身体運動を行っているときの身体感覚を誘発させる。すなわち本運動教示方法によって提示される力覚によって、ユーザは、動作教示者の身体運動を再現するために(すなわち理想的な身体運動を行うために)、どの筋肉をどのような強度で動かせばよいかの感覚をその時間変化を含めて的確に得ることができる。
The force sense induces the user to feel the physical sensation when the motion instructor is performing physical exercise. That is, by the force sensation presented by this movement teaching method, the user should move which muscle with what strength in order to reproduce the body movement of the movement teacher (that is, to perform the ideal body movement). You can get a good feeling, including the change over time.
本実施の形態によれば、ユーザの皮膚に刺激を与えることによって、動作教示者の身体運動を的確にユーザに教示することができる。
According to the present embodiment, by stimulating the skin of the user, the physical exercise of the motion instructor can be accurately taught to the user.
[第21の実施の形態]
第21の実施の形態はプログラムである。このプログラムは、前述の第20の実施の形態に係る運動教示方法をコンピュータに実行させる。この実施の形態によれば、高いリアリティを持った身体運動の教示をソフトウェアとして実現することができる。 [21st Embodiment]
The 21st embodiment is a program. This program causes a computer to execute the exercise teaching method according to the twentieth embodiment described above. According to this embodiment, it is possible to realize teaching of physical exercise with high reality as software.
第21の実施の形態はプログラムである。このプログラムは、前述の第20の実施の形態に係る運動教示方法をコンピュータに実行させる。この実施の形態によれば、高いリアリティを持った身体運動の教示をソフトウェアとして実現することができる。 [21st Embodiment]
The 21st embodiment is a program. This program causes a computer to execute the exercise teaching method according to the twentieth embodiment described above. According to this embodiment, it is possible to realize teaching of physical exercise with high reality as software.
以上、本発明の実施の形態について詳細に説明した。これらの実施の形態は例示であり、いろいろな変形および変更が本発明の特許請求の範囲内で可能なこと、またそうした変形例および変更も本発明の特許請求の範囲にあることは当業者に理解されるところである。従って、本明細書での記述および図面は限定的ではなく例証的に扱われるべきものである。
The embodiment of the present invention has been described in detail above. These embodiments are exemplary, and those skilled in the art will appreciate that various modifications and modifications are possible within the claims of the invention, and that such modifications and modifications are also within the claims of the present invention. It is about to be understood. Therefore, the descriptions and drawings herein should be treated as exemplary rather than limiting.
[変形例]
以下、変形例について説明する。変形例の図面および説明では、実施の形態と同一または同等の構成要素、部材には、同一の符号を付する。実施の形態と重複する説明を適宜省略し、第1実施の形態と相違する構成について重点的に説明する。 [Modification example]
Hereinafter, a modified example will be described. In the drawings and description of the modified examples, the same or equivalent components and members as those in the embodiment are designated by the same reference numerals. The description that overlaps with the embodiment will be omitted as appropriate, and the configuration different from that of the first embodiment will be mainly described.
以下、変形例について説明する。変形例の図面および説明では、実施の形態と同一または同等の構成要素、部材には、同一の符号を付する。実施の形態と重複する説明を適宜省略し、第1実施の形態と相違する構成について重点的に説明する。 [Modification example]
Hereinafter, a modified example will be described. In the drawings and description of the modified examples, the same or equivalent components and members as those in the embodiment are designated by the same reference numerals. The description that overlaps with the embodiment will be omitted as appropriate, and the configuration different from that of the first embodiment will be mainly described.
刺激素子により皮膚に形成される力学的分布は、ひずみエネルギー密度分布であってもよい。あるいは力学的分布はひずみの分布であってもよく、このひずみは主ひずみまたは相当ひずみであってもよい。あるいは、力学的分布は力の分布であってもよく、この力はせん断力または垂直抗力であってもよい。さらに、力学的分布は応力の分布であってもよく、この応力は、圧力、主応力またはミーゼス応力のいずれかであってもよい。
The mechanical distribution formed on the skin by the stimulating element may be a strain energy density distribution. Alternatively, the mechanical distribution may be a strain distribution, which strain may be the principal strain or the equivalent strain. Alternatively, the mechanical distribution may be a force distribution, which may be a shear force or a normal force. Further, the mechanical distribution may be a stress distribution, which stress may be either pressure, principal stress or von Mises stress.
これらの各変形例は実施の形態と同様の作用、効果を奏する。
Each of these modified examples has the same action and effect as that of the embodiment.
上述した各実施の形態と変形例の任意の組み合わせもまた本発明の実施の形態として有用である。組み合わせによって生じる新たな実施の形態は、組み合わされる各実施の形態および変形例それぞれの効果をあわせもつ。
Any combination of each of the above-described embodiments and modifications is also useful as an embodiment of the present invention. The new embodiments resulting from the combination have the effects of each of the combined embodiments and variants.
本発明は、運動教示装置、運動教示システム、運動教示方法およびプログラムとして産業上利用可能である。
The present invention can be industrially used as an exercise teaching device, an exercise teaching system, an exercise teaching method and a program.
1・・運動教示装置
2・・運動教示装置
3・・運動教示装置
4・・運動教示システム
5・・運動教示システム
6・・運動教示システム
7・・運動教示システム
8・・運動教示システム
11・・刺激素子
12・・刺激素子
13・・刺激素子
14・・刺激素子
1n・・刺激素子
20・・身体運動情報取得部
30・・制御部
40・・記憶部
50・・刺激素子ユニット
60・・動作教示者運動計測装置
70・・ユーザ運動計測装置
80・・学習部
90・・カメラ
92・・表示装置
94・・マイクロフォン
96・・再生装置
M・・筋肉
S・・皮膚
S1・・動作教示者の身体運動の情報を取得するステップ
S2・・ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、当該ユーザの筋肉の表面に近接する皮膚に刺激を付与するステップ 1 ・ ・ Exercise teaching device 2 ・ ・ Exercise teaching device 3 ・ ・Exercise teaching device 4 ・ ・ Exercise teaching system 5 ・ ・ Exercise teaching system 6 ・ ・ Exercise teaching system 7 ・ ・ Exercise teaching system 8 ・ ・ Exercise teaching system 11 ・ ・・ Stimulation element 12 ・ ・ Stimulation element 13 ・ ・ Stimulation element 14 ・ ・ Stimulation element 1n ・ ・ Stimulation element 20 ・ ・ Body movement information acquisition unit 30 ・ ・ Control unit 40 ・ ・ Storage unit 50 ・ ・ Stimulation element unit 60 ・ ・Motion teacher motion measuring device 70 ・ ・ User motion measuring device 80 ・ ・ Learning unit 90 ・ ・ Camera 92 ・ ・ Display device 94 ・ ・ Microphone 96 ・ ・ Reproduction device M ・ ・ Muscle S ・ ・ Skin S1 ・ ・ Motion instructor Step to acquire information on physical exercise of S2 ... Stimulation is applied to the skin close to the surface of the user's muscle by using a plurality of stimulating elements arranged on the skin close to the surface of the user's muscle. Step
2・・運動教示装置
3・・運動教示装置
4・・運動教示システム
5・・運動教示システム
6・・運動教示システム
7・・運動教示システム
8・・運動教示システム
11・・刺激素子
12・・刺激素子
13・・刺激素子
14・・刺激素子
1n・・刺激素子
20・・身体運動情報取得部
30・・制御部
40・・記憶部
50・・刺激素子ユニット
60・・動作教示者運動計測装置
70・・ユーザ運動計測装置
80・・学習部
90・・カメラ
92・・表示装置
94・・マイクロフォン
96・・再生装置
M・・筋肉
S・・皮膚
S1・・動作教示者の身体運動の情報を取得するステップ
S2・・ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、当該ユーザの筋肉の表面に近接する皮膚に刺激を付与するステップ 1 ・ ・ Exercise teaching device 2 ・ ・ Exercise teaching device 3 ・ ・
Claims (21)
- ユーザの筋肉に近接する皮膚に力覚を提示することによって身体運動を教示するためのウェアラブルな運動教示装置であって、
動作教示者の身体運動の情報を取得する身体運動情報取得部と、
前記ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子と、
前記複数の刺激素子を制御する制御部とを備え、
前記複数の刺激素子の各々は、前記ユーザの筋肉の表面に近接する皮膚に刺激を与え、
前記制御部は、前記身体運動情報取得部が取得した情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成するように前記複数の刺激素子を制御し、
前記力覚は、前記ユーザに動作教示者が身体運動を行っているときの身体感覚を誘発させることを特徴とする運動教示装置。 A wearable exercise teaching device for teaching physical exercise by presenting a sense of force to the skin close to the user's muscles.
The physical exercise information acquisition unit that acquires the physical exercise information of the motion instructor,
A plurality of stimulators placed on the skin close to the surface of the user's muscles,
A control unit that controls the plurality of stimulating elements is provided.
Each of the plurality of stimulating elements stimulates the skin close to the surface of the user's muscles.
The control unit controls the plurality of stimulating elements so as to form a mechanical distribution on the skin that generates a desired force sensation based on the information acquired by the body movement information acquisition unit.
The force sensation is a motion teaching device, characterized in that the user induces a physical sensation when the motion instructor is performing physical exercise. - 動作教示者の身体運動の情報を記憶する記憶部を備え、
前記身体運動情報取得部は、前記記憶部から情報を取得することを特徴とする請求項1に記載の運動教示装置。 Equipped with a storage unit that stores information on the physical movements of motion teachers
The exercise teaching device according to claim 1, wherein the physical exercise information acquisition unit acquires information from the storage unit. - 前記刺激素子は、回転運動によって皮膚に刺激を与え、
前記制御部は、前記刺激素子の回転角度および回転方向を制御することを特徴とする請求項1または2に記載の運動教示装置。 The stimulating element stimulates the skin by rotational movement, and the stimulating element stimulates the skin.
The motion teaching device according to claim 1 or 2, wherein the control unit controls a rotation angle and a rotation direction of the stimulation element. - 前記制御部は、目的とする力覚が大きければ大きいほど、前記刺激素子の回転角度が大きくなるように前記刺激素子を制御することを特徴とする請求項3に記載の運動教示装置。 The motion teaching device according to claim 3, wherein the control unit controls the stimulating element so that the larger the target force sense is, the larger the rotation angle of the stimulating element is.
- 前記刺激素子は、回転運動によって皮膚に刺激を与え、
前記制御部は、前記刺激素子の回転速度および回転方向を制御することを特徴とする請求項1または2のいずれかに記載の運動教示装置。 The stimulating element stimulates the skin by rotational movement, and the stimulating element stimulates the skin.
The motion teaching device according to claim 1 or 2, wherein the control unit controls the rotation speed and the rotation direction of the stimulation element. - 前記制御部は、目的とする力覚が大きければ大きいほど、前記刺激素子の回転速度が大きくなるように前記刺激素子を制御することを特徴とする請求項5に記載の運動教示装置。 The motion teaching device according to claim 5, wherein the control unit controls the stimulating element so that the larger the target force sense is, the larger the rotation speed of the stimulating element is.
- 前記刺激素子は、回転運動によって皮膚に刺激を与え、
前記制御部は、前記刺激素子の回転トルクおよび回転方向を制御することを特徴とする請求項1または2に記載の運動教示装置。 The stimulating element stimulates the skin by rotational movement, and the stimulating element stimulates the skin.
The motion teaching device according to claim 1 or 2, wherein the control unit controls the rotational torque and the rotational direction of the stimulating element. - 前記制御部は、目的とする力覚が大きければ大きいほど、前記刺激素子の回転トルクが大きくなるように前記刺激素子を制御することを特徴とする請求項7に記載の運動教示装置。 The motion teaching device according to claim 7, wherein the control unit controls the stimulating element so that the larger the target force sense is, the larger the rotational torque of the stimulating element is.
- 隣接する前記刺激素子間の間隔は、当該隣接する刺激素子によって空間的に連続な力覚を提示可能な間隔であることを特徴とする請求項1から8のいずれかに記載の運動教示装置。 The motion teaching device according to any one of claims 1 to 8, wherein the interval between the adjacent stimulating elements is an interval capable of presenting a spatially continuous force sense by the adjacent stimulating element.
- 前記刺激素子は、前記ユーザの上腕部、前腕部、手首、手指、大腿部、下腿部、足首、足指、首、胴体または腰部の筋肉の表面に近接する皮膚の上に配置されることを特徴とする請求項1から9のいずれかに記載の運動教示装置。 The stimulating element is placed on the skin close to the surface of the user's upper arm, forearm, wrist, finger, thigh, lower leg, ankle, toe, neck, torso or lumbar muscle. The exercise teaching device according to any one of claims 1 to 9, wherein the exercise teaching device is characterized in that.
- 前記刺激素子は、回転運動に加えて、電気刺激によって皮膚に刺激を与えることを特徴とする請求項3から10のいずれかに記載の運動教示装置。 The motion teaching device according to any one of claims 3 to 10, wherein the stimulating element stimulates the skin by electrical stimulation in addition to rotational motion.
- 請求項1から11のいずれかに記載の運動教示装置と、
動作教示者の身体運動の情報をリアルタイムに計測する動作教示者運動計測装置と、を備え、
前記身体運動情報取得部は、前記動作教示者運動計測装置から動作教示者の身体運動の情報を取得することを特徴とする運動教示システム。 The exercise teaching device according to any one of claims 1 to 11.
It is equipped with a motion instructor motion measuring device that measures information on the body motion of the motion instructor in real time.
The physical exercise information acquisition unit is a motion teaching system characterized by acquiring information on the physical motion of a motion instructor from the motion instructor motion measuring device. - 前記動作教示者の身体運動の情報は、筋電位、筋張力または皮膚変形を含むことを特徴とする請求項12に記載の運動教示システム。 The exercise teaching system according to claim 12, wherein the physical exercise information of the motion instructor includes a myoelectric potential, muscle tension, or skin deformation.
- 前記ユーザの身体運動の情報をリアルタイムに計測するユーザ運動計測装置を備え、
前記制御部は、前記動作教示者運動計測装置が計測した前記動作教示者の身体運動の情報と、前記ユーザ運動計測装置が計測した前記ユーザの身体運動の情報との差異に基づいて、前記複数の刺激素子を制御することを特徴とする請求項12または13に記載の運動教示システム。 It is equipped with a user exercise measuring device that measures the user's physical exercise information in real time.
The control unit has a plurality of the control units based on the difference between the physical motion information of the motion teacher measured by the motion instructor motion measuring device and the physical motion information of the user measured by the user motion measuring device. The motion teaching system according to claim 12 or 13, wherein the stimulating element of the above is controlled. - 前記制御部は、前記差異が小さくなるように、ユーザが筋活動を増大させる力覚を発生させる力学的分布を皮膚に形成するように前記複数の刺激素子を制御することを特徴する請求項14に記載の運動教示システム。 14. The control unit is characterized in that the plurality of stimulating elements are controlled so that the user forms a mechanical distribution on the skin that generates a force sensation that increases muscle activity so that the difference becomes small. The exercise teaching system described in.
- 前記制御部は、前記差異が小さくなるように、ユーザが筋活動を静止させる力覚を発生させる力学的分布を皮膚に形成するように前記複数の刺激素子を制御することを特徴する請求項14に記載の運動教示システム。 14. The control unit is characterized in that the plurality of stimulating elements are controlled so that the user forms a mechanical distribution on the skin that generates a force sensation that causes the muscle activity to rest so that the difference becomes small. The exercise teaching system described in.
- 前記動作教示者の身体運動の情報と、前記身体運動の情報から推定された力学的分布とを学習データとして機械学習することにより、前記身体運動情報取得部が前記動作教示者運動計測装置から取得した前記動作教示者の身体運動の情報が入力されたときに、目的とする力覚を発生させる力学的分布を出力する学習部をさらに備えることを特徴とする請求項12から16のいずれかに記載の運動教示システム。 By machine learning the physical motion information of the motion instructor and the mechanical distribution estimated from the physical motion information as learning data, the physical motion information acquisition unit acquires from the motion instructor motion measuring device. The device according to any one of claims 12 to 16, further comprising a learning unit that outputs a mechanical distribution that generates a desired force sensation when the information on the physical movement of the motion teacher is input. The described exercise teaching system.
- 前記動作教示者の視点位置から撮影された前記動作教示者の一人称映像を表示するウェアラブルな表示装置と、
を備える請求項12から17のいずれかに記載の運動教示システム。 A wearable display device that displays the first-person image of the motion instructor taken from the viewpoint position of the motion instructor, and
The exercise teaching system according to any one of claims 12 to 17. - 前記動作教示者の身体運動の際の周囲の音を収録するマイクロフォンと、
前記マイクロフォンで収録された音声を再生するウェアラブルな再生装置と、
を備える請求項12から17のいずれかに記載の運動教示システム。 A microphone that records the surrounding sounds during the physical exercise of the motion teacher,
A wearable playback device that reproduces the sound recorded by the microphone, and
The exercise teaching system according to any one of claims 12 to 17. - ユーザの皮膚に力覚を提示することによって身体運動を教示するための運動教示方法であって、
動作教示者の身体運動の情報を取得するステップと、
前記ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、前記ユーザの筋肉の表面に近接する皮膚に刺激を与えるステップと、を備え、
前記複数の刺激素子は、前記身体運動の情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成し、
前記力覚は、前記ユーザに動作教示者が身体運動を行っているときの身体感覚を誘発させることを特徴とする運動教示方法。 It is an exercise teaching method for teaching physical exercise by presenting a sense of force to the user's skin.
Steps to acquire information on the physical movement of the movement teacher,
A step of stimulating the skin close to the surface of the user's muscle using a plurality of stimulating elements placed on the skin close to the surface of the user's muscle.
The plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on the information of the body movement.
The force sense is a movement teaching method characterized in that the user is induced to have a physical sensation when the motion instructor is performing physical exercise. - 動作教示者の身体運動の情報を取得するステップと、
ユーザの筋肉の表面に近接する皮膚の上に配置される複数の刺激素子を用いて、前記ユーザの筋肉の表面に近接する皮膚に刺激を与えるステップと、を備え、
前記複数の刺激素子は、前記身体運動の情報に基づいて、目的とする力覚を発生させる力学的分布を皮膚に形成し、
前記力覚は、前記ユーザに動作教示者が身体運動を行っているときの身体感覚を誘発させることを特徴とする方法をコンピュータに実行させるプログラム。 Steps to acquire information on the physical movement of the movement teacher,
A step of stimulating the skin close to the surface of the user's muscle using a plurality of stimulating elements placed on the skin close to the surface of the user's muscle.
The plurality of stimulating elements form a mechanical distribution on the skin that generates a desired force sensation based on the information of the body movement.
The force sense is a program that causes a computer to execute a method characterized in that the user induces a physical sensation when a motion instructor is performing physical exercise.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022572995A JPWO2022145258A1 (en) | 2020-12-28 | 2021-12-17 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020219284 | 2020-12-28 | ||
| JP2020-219284 | 2020-12-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022145258A1 true WO2022145258A1 (en) | 2022-07-07 |
Family
ID=82259330
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/046747 WO2022145258A1 (en) | 2020-12-28 | 2021-12-17 | Movement instruction device, movement instruction system, movement instruction method, and program |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2022145258A1 (en) |
| WO (1) | WO2022145258A1 (en) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000501033A (en) * | 1995-11-30 | 2000-02-02 | ヴァーチャル テクノロジーズ インコーポレイテッド | Human / machine interface with tactile feedback |
| JP2001166676A (en) * | 1999-12-09 | 2001-06-22 | Sony Corp | Tactile sense presenting mechanism and inner force sense presenting device using the same |
| WO2009035100A1 (en) * | 2007-09-14 | 2009-03-19 | National Institute Of Advanced Industrial Science And Technology | Virtual reality environment creating device, and controller device |
| JP2017504443A (en) * | 2013-10-29 | 2017-02-09 | コウアヒェ, ノルディンKouache, Nordin | Method and system for transmitting tactile instructions to a human body |
| WO2017213202A1 (en) * | 2016-06-08 | 2017-12-14 | 株式会社国際電気通信基礎技術研究所 | Motion teaching system and motion teaching method |
| JP2018008250A (en) * | 2016-07-15 | 2018-01-18 | 国立大学法人電気通信大学 | Force sense and vibration sense presentation device |
| WO2019010435A1 (en) * | 2017-07-06 | 2019-01-10 | Icuemotion Llc | Systems and methods for data-driven movement skill training |
| US20190019431A1 (en) * | 2017-07-13 | 2019-01-17 | Kabushiki Kaisha Toshiba | Information processing device, method, and storage medium |
| JP2019070987A (en) * | 2017-10-11 | 2019-05-09 | 国立研究開発法人産業技術総合研究所 | Body motion guide system, stimulus presentation device, stimulus presentation method and program |
| US20190283247A1 (en) * | 2018-03-15 | 2019-09-19 | Seismic Holdings, Inc. | Management of biomechanical achievements |
| US20200237031A1 (en) * | 2019-01-13 | 2020-07-30 | Kinaptic, LLC | Fabric, Connections and Functional Structures for Wearable Electronic Garments and Applications for the Same |
| WO2021049296A1 (en) * | 2019-09-09 | 2021-03-18 | 国立研究開発法人科学技術振興機構 | Kinesthetic sense provision device and kinesthetic sense provision method |
-
2021
- 2021-12-17 JP JP2022572995A patent/JPWO2022145258A1/ja active Pending
- 2021-12-17 WO PCT/JP2021/046747 patent/WO2022145258A1/en active Application Filing
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000501033A (en) * | 1995-11-30 | 2000-02-02 | ヴァーチャル テクノロジーズ インコーポレイテッド | Human / machine interface with tactile feedback |
| JP2001166676A (en) * | 1999-12-09 | 2001-06-22 | Sony Corp | Tactile sense presenting mechanism and inner force sense presenting device using the same |
| WO2009035100A1 (en) * | 2007-09-14 | 2009-03-19 | National Institute Of Advanced Industrial Science And Technology | Virtual reality environment creating device, and controller device |
| JP2017504443A (en) * | 2013-10-29 | 2017-02-09 | コウアヒェ, ノルディンKouache, Nordin | Method and system for transmitting tactile instructions to a human body |
| WO2017213202A1 (en) * | 2016-06-08 | 2017-12-14 | 株式会社国際電気通信基礎技術研究所 | Motion teaching system and motion teaching method |
| JP2018008250A (en) * | 2016-07-15 | 2018-01-18 | 国立大学法人電気通信大学 | Force sense and vibration sense presentation device |
| WO2019010435A1 (en) * | 2017-07-06 | 2019-01-10 | Icuemotion Llc | Systems and methods for data-driven movement skill training |
| US20190019431A1 (en) * | 2017-07-13 | 2019-01-17 | Kabushiki Kaisha Toshiba | Information processing device, method, and storage medium |
| JP2019070987A (en) * | 2017-10-11 | 2019-05-09 | 国立研究開発法人産業技術総合研究所 | Body motion guide system, stimulus presentation device, stimulus presentation method and program |
| US20190283247A1 (en) * | 2018-03-15 | 2019-09-19 | Seismic Holdings, Inc. | Management of biomechanical achievements |
| US20200237031A1 (en) * | 2019-01-13 | 2020-07-30 | Kinaptic, LLC | Fabric, Connections and Functional Structures for Wearable Electronic Garments and Applications for the Same |
| WO2021049296A1 (en) * | 2019-09-09 | 2021-03-18 | 国立研究開発法人科学技術振興機構 | Kinesthetic sense provision device and kinesthetic sense provision method |
Non-Patent Citations (1)
| Title |
|---|
| HIYAMA ATSUSHI: "Artisan skill training system using multisensory experience data from first-person standpoint", TRANSACTIONS OF THE VIRTUAL REALITY SOCIETY OF JAPAN, vol. 16, no. 4, 1 January 2011 (2011-01-01), pages 643 - 652, XP055948025, DOI: 10.18974/tvrsj.16.4_643 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022145258A1 (en) | 2022-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7169590B2 (en) | Method for inducing illusionary tactile force sense and device for inducing illusionary tactile force sense | |
| Sigrist et al. | Sonification and haptic feedback in addition to visual feedback enhances complex motor task learning | |
| Yem et al. | Wearable tactile device using mechanical and electrical stimulation for fingertip interaction with virtual world | |
| Bark et al. | Effects of vibrotactile feedback on human learning of arm motions | |
| Lieberman et al. | TIKL: Development of a wearable vibrotactile feedback suit for improved human motor learning | |
| Huang et al. | Recent developments in biofeedback for neuromotor rehabilitation | |
| Quek et al. | Augmentation of stiffness perception with a 1-degree-of-freedom skin stretch device | |
| Alahakone et al. | Vibrotactile feedback systems: Current trends in rehabilitation, sports and information display | |
| Turolla et al. | Haptic-based neurorehabilitation in poststroke patients: a feasibility prospective multicentre trial for robotics hand rehabilitation | |
| Sisto et al. | Virtual reality applications for motor rehabilitation after stroke | |
| Stanley et al. | Design of body-grounded tactile actuators for playback of human physical contact | |
| Takhashi et al. | Development of an upper limb patient simulator for physical therapy exercise | |
| CN108140421A (en) | Training | |
| Lieberman et al. | Development of a wearable vibrotactile feedback suit for accelerated human motor learning | |
| Lee et al. | Effects of visual feedback on out-of-body illusory tactile sensation when interacting with augmented virtual objects | |
| Hagimori et al. | Combining tendon vibration and visual stimulation enhances kinesthetic illusions | |
| Kurita et al. | Stiffness display by muscle contraction via electric muscle stimulation | |
| WO2022145258A1 (en) | Movement instruction device, movement instruction system, movement instruction method, and program | |
| JP2023139021A (en) | Force sense presentation device and force sense presentation method | |
| Bergamasco et al. | Haptic interfaces for embodiment in virtual environments | |
| Hirao et al. | Leveraging Tendon Vibration to Enhance Pseudo-Haptic Perceptions in VR | |
| Didier et al. | Augmented feedback, virtual reality and robotics for designing new rehabilitation methods | |
| Anderson et al. | Virtual equine assisted therapy | |
| Umesawa et al. | Development and evaluation of a device for inducing kinesthetic illusion of dual joint movements | |
| Beckers et al. | The role of haptic interactions with robots for promoting motor learning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21915118 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022572995 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21915118 Country of ref document: EP Kind code of ref document: A1 |