WO2022113396A1 - デバイスの無線受電用の筐体と、該筐体を有するデバイス - Google Patents
デバイスの無線受電用の筐体と、該筐体を有するデバイス Download PDFInfo
- Publication number
- WO2022113396A1 WO2022113396A1 PCT/JP2021/014102 JP2021014102W WO2022113396A1 WO 2022113396 A1 WO2022113396 A1 WO 2022113396A1 JP 2021014102 W JP2021014102 W JP 2021014102W WO 2022113396 A1 WO2022113396 A1 WO 2022113396A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- antenna
- housing
- power receiving
- receiving device
- slot
- Prior art date
Links
- 230000005404 monopole Effects 0.000 claims abstract description 49
- 230000005684 electric field Effects 0.000 claims abstract description 14
- 230000005855 radiation Effects 0.000 claims description 29
- 229910052751 metal Inorganic materials 0.000 claims description 27
- 239000002184 metal Substances 0.000 claims description 27
- 238000000034 method Methods 0.000 claims description 14
- 238000012546 transfer Methods 0.000 claims description 9
- 230000002349 favourable effect Effects 0.000 abstract 1
- 238000001514 detection method Methods 0.000 description 30
- 238000010586 diagram Methods 0.000 description 25
- 239000000758 substrate Substances 0.000 description 25
- 230000008859 change Effects 0.000 description 22
- 230000006870 function Effects 0.000 description 20
- 238000004088 simulation Methods 0.000 description 19
- 230000005540 biological transmission Effects 0.000 description 13
- 230000000737 periodic effect Effects 0.000 description 13
- 230000001965 increasing effect Effects 0.000 description 7
- 230000010355 oscillation Effects 0.000 description 7
- 238000003756 stirring Methods 0.000 description 7
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000004590 computer program Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 230000000295 complement effect Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000005672 electromagnetic field Effects 0.000 description 3
- 230000001939 inductive effect Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 238000012840 feeding operation Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000011553 magnetic fluid Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 229910052755 nonmetal Inorganic materials 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/005—Mechanical details of housing or structure aiming to accommodate the power transfer means, e.g. mechanical integration of coils, antennas or transducers into emitting or receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/20—Circuit arrangements or systems for wireless supply or distribution of electric power using microwaves or radio frequency waves
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
Abstract
Description
本出願は、2020年11月24日に出願された「ワイヤレス給電装置」と題する日本国特許出願特願2020-194699号の優先権を主張し、その開示はその全体が参照により本明細書に取り込まれる。
本願は上記課題を解決する手段を複数含んでいるが、その一例を以下に挙げる。
センサまたはアクチュエータであるデバイスの本体を構成する筐体であって、
前記筐体は、無線での給電用に主に電界または磁界を発生する受電装置を取付け、
前記受電装置は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、チップ・アンテナ及び逆Fアンテナのうちの少なくとも1つであり、
前記筐体は3次元空間内に大きさを有し、前記受電装置を設けたことによる前記筐体の前記3次元空間内の大きさの拡張を最大で実質的に1軸方向に限定した、
デバイス用の筐体。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
図1の(A)を参照すると、本実施例の受電システム1が例示されている。
受電システム1は、少なくとも、受電装置20とデバイス30を含む。受電装置20は、送電装置10から送られるエネルギEをワイヤレス(無線)方式で受電して、デバイス30を給電する。このため、受電装置20は、送電装置10との間で、給電用に物理的なケーブルを配線する必要性を完全になくしている。
また、受電装置20は、給電対象のデバイス30と一体に構成される。このため、受電装置20は、デバイス30との間で、給電用に物理的なケーブルを配線する必要性を完全になくしている。
図1の(B)に例示するように、受電システム1は、他の構成要素30、40を含むことは可能である。
受電装置20と対に作用する送電装置10とは、ワイヤレスでエネルギEを送電可能な装置として定義される。
デバイス30は、動作に必要なエネルギを受電装置20から給電される装置である。特に、デバイス30は、センサまたはアクチュエータである。
センサとは、物理量を測定し、その測定結果を生成する電子機器として定義される。
アクチュエータとは、入力信号に基づいて、物理量を変更する電子機器として定義される。
また、アクチュエータは、電気式アクチュエータ、油圧式アクチュエータ、空気圧式アクチュエータ、化学式アクチュエータ、磁性流体アクチュエータ、電気粘性流体アクチュエータ等でもよい。
図1の(A)に示した例では、受電システム1は、産業用ロボット(工作機械を含む)または家庭用ロボット(家電を含む)等である機械100に内蔵されている。
ただし、受電システム1は、図示した機械100の他、様々な応用例に適用可能である。例えば、受電システム1は、FA機器全般において、近接センサや磁気センサ等の工場のライン上で物体を検出するセンサを給電するように設置されてもよい。さらに、受電システム1は、ビルマネジメント全般において、温湿度、照度センサ等のオフィス環境の状態監視をするように設置されてもよい。
以下、多関節ロボット100に内蔵された受電システム1について例示する。
本実施例では、上記配線の問題が生じることを回避する。
以下、デバイス30の具体例として、近接センサについて例示する。
図2の(A)、(B)を参照すると、従前の近接センサ30の斜視図と側面図とが例示されている。
近接センサ30とは、検出対象に接触することなく、検出対象を検出することを目的として使用されるデバイスである。近接センサ30には様々な種類が知られているが、例えば、金属が近付くと反応するものがある。近接センサ30は、非接触のため摩耗などの劣化はなく、防水性と防塵性があり、壊れにくいという利点を有する。特に、金属に反応するタイプでは、ホコリや水滴などの影響を受けにくく、誤検出が少ないという利点を有する。近接センサ30の検出距離には様々な種類があるが、例えば、mm単位で検出するものがある。特に、近接センサ30には、誘導形近接センサ、静電容量形近接センサ、磁気近接センサ等がある。
近接センサ30は、物体を検出するという目的上、物体と近接して設けられる必要がある。一般に、検出対象の物体(ワークW)の近くに近接センサ30を設置する場合、近接センサ30がワークWと衝突する事態が生じ得る。かかる場合、近接センサ30の破損が起こり得る。このため、近接センサ30の交換頻度は比較的高いといわれている。例えば、3カ月に1回程度の頻度で近接センサ30を交換することがある。
そこで、製造業では、民主機器向け製品を車載向け製品に転用することがしばしば行われている。この場合、必要とされる期間を約1年程度まで短縮できることがある。
本実施形態では、12乃至24V対応の既存の近接センサ30をそのまま用いることにより、低消費電力型の近接センサの新規開発を不要にすることを想定する。そのため、本出願人は、下記の試験を実施した。
図3の(A)を参照すると、12乃至24V対応の市販の異なる2種類の近接センサ(a、b)に対して、推奨値よりも低い電圧を供給したときの、電源電圧の変化に対する近接センサの電力の推移を示している。同図では、グラフの横軸に供給電圧(V)が示され、縦軸に電力(mW)が示されている。
12乃至24V対応の既存の近接センサに対して供給電圧を下げていき、6V程度まで電圧を下げた段階では、近接センサは仕様通りの動作をすることが検証された。通常、物体を検出すると、近接センサの出力はLowになる。この際、電源電圧を下げるほどに消費電力は小さくなる。しかし、依然として、30mW程度の消費電力が生じたことが確認された。
このように、12乃至24V対応の既存の近接センサに対して、供給電圧を推奨値から相当に下げた場合であっても、電力の要求を満たし得ることが検証された。この場合、5乃至6V対応の新規の近接センサを研究開発する必要性を回避できる。しかしながら、この低電力化時には、近接センサは、通常時(推奨値の12乃至24Vで動作する時)と比べて、異なる動作をすることが確認された。
図4の(B)を参照すると、上記の図4の(A)の場合に、横軸に供給電圧(V)、縦軸に時間(msec)をとったグラフが示されている。この結果、図4の(A)に例示した間欠動作の周期をTperiodには、図4の(B)に示したグラフのような関係性があることが認められた。即ち、近接センサの一種類(a)では、供給電圧を6Vからさらに下げていくと、上記間欠動作の周期Tperiodの大きさがほぼ比例して増大することがわかった。このことは、近接センサの他の種類(b)についても、同様の結果が得られることが確認された。このように、近接センサの間欠動作と周期変動との間には関連性があることが認められた。
例えば、図4の(B)を参照して、近接センサ(a)に対して5.5Vの電圧を供給したとする。このとき、近接センサ(a)は、20.4msecの周期Tperiodで間欠動作をすることが推測できる。そこで、この周期の大きさに対応して、近接センサ30の出力を周期フィルタ40に通す。その結果、近接センサ30が低電力モードで物体Wを検出して、間欠動作を示すとき、通常電力モードと同様の出力結果を導き出すことを可能にしている。
ただし、受電システム1は、図1の(B)に示した構成に限定されない。受電システム1は様々な種類のデバイス(センサまたはアクチュエータ)30に適用可能であって、デバイス30の種類によっては低電力モードの他、通常電力モードでデバイス30を動作させてもよい。従って、受電システム1は、周期フィルタ40を必ずしも含まなくてもよい。
次に、図1乃至図4に例示した受電システム1に用いられる受電装置20について説明する。本実施例では、受電装置20は、電力受信アンテナとして構成される。特に、電力受信アンテナは、給電対象のデバイス30の本体を構成する筐体31(図2の(A)参照)を利用して構成されるため、受電装置20は、デバイス30と一体に設けられる。
図5の(A)には、受電装置20として、ダイポール・アンテナ21を用いる場合が例示されている。例えば、近接センサ30の筐体31にダイポール・アンテナ21を取り付けて、電界放射を発生するアンテナとして機能させる。通常、近接センサ30は、金属製の本体又は筐体31を有するが、ダイポール・アンテナ21の周囲は金属であってはならず、樹脂等(金属でないもの)である必要がある。
図8を参照すると、本実施例に係る受電装置20を一体的に備えた近接センサ30の斜視図が示されている。同図は、図5の(C)に例示したダイポール・アンテナ21とスロット・アンテナ22を組み合わせた場合の実装例に相当する。
従前の近接センサ30では、筐体31の検出面32とは反対側の端部から配線用のケーブルを延在させていたが(図2の(C)参照)、本実施形態では、そのようなケーブルを不要とし、その空いたスペースを利用して、筐体31の端部にダイポール・アンテナ21を取り付けている。この際、近接センサの従前のコネクタ33の金属をアンテナのGNDとして利用している。
従って、ダイポール・アンテナ21は、従前のコネクタ33を取り換えることで、筐体31に設けられてもよい。
なお、筐体31上にスロットを穿設する際、内部のコイルや回路等をオイルの侵入から保護するため、金属または樹脂によってコイルや回路等を覆うことは可能である。
また、筐体31が非金属製の場合には、その筐体31の壁を貫通するスロットに対して金属の膜を付着したり、金属の部品を追加することで、スロット・アンテナ22として作用させることは可能である。
このように、筐体31は3次元空間(X軸、Y軸及びZ軸方向)に大きさを有し、受電装置21、22を設けたことによる筐体31の3次元空間内の大きさの拡張を最大で実質的に1軸方向(X軸方向)に限定した。特にスロット・アンテナ22の場合は、筐体31の大きさの拡張を完全になくすことができる。
また、図5の(A)、(B)に例示したように、図8の実装例においても、これらアンテナ21、22の一方のみを設けることは可能である。
次に、図11乃至図14を参照して、使用時に、受電装置20の受電効率を向上させる手段について説明する。
チャンバ90は、内部に画定した閉鎖空間の中に、送電装置10と受電装置20とを閉じ込めることにより、双方の間でワイヤレスにエネルギEを送る効率を向上させている。
なお、同図では省略して示しているが、このチャンバ90内には、図1に例示した機械100の全部または一部を収容することが可能である。
図11の(C)に示すように、チャンバ90内で送信される電磁波は、チャンバ90の境界を定める各側面で反射する。最終的に、この電磁波は閉鎖空間内で無数に反射して、チャンバ90内にエネルギが閉じ込められる。このため、受電装置20は、送電装置10から送られるエネルギを様々な方向から受け取ることができる。従って、チャンバ90を用いないで、一方向からのみエネルギを受け取る場合と比較して(図1(A)の符号E参照)、受電装置20は、多方向からエネルギを受け取ることができる。
図13の(A)、(B)を参照すると、チャンバ90の天井部に電磁波反射手段として攪拌ファン91を設置することが例示されている。攪拌ファン91は、回転軸92を中心として一対の反射面93、94がファン状又はプロペラ状に回転するように構成している。一対の反射面93、94は、それぞれ長手方向に反対方向に延び、全体として直線状に延在する。ただし、反射面93、94の数、大きさ、形状、角度等は、実施形態に応じて様々に変えることができる。
従って、図1の(A)に例示したように、送電装置10に対して受電装置20が相対的な位置を変化させる場合、その位置の変化に合わせて攪拌ファン91が回転して、反射面93、94の位置を変化させる。この結果、受電装置20の位置の変化に追従して、常に受電装置20が高い効率でエネルギを受けることを可能にする。
また、図13の(B)に示したように、一対の反射面93、94がチャンバ90の長手方向に沿ってほぼ交差方向に延在する場合、送電装置10から上方に逃げるエネルギを、長手方向に対して交差する方向(横方向)に反射して送ることができる。
さらに、一対の反射面93、94は、中央の回転軸92を中心として回転することで、エネルギを反射する位置と方向を様々に調整することができる。
上述のように、チャンバ90の各側面は、電磁波を反射する。反射面95は、チャンバ90の側面とは異なる反射率で電磁波を反射することができる。チャンバ90の各側面での反射効率を変化させることで、チャンバ90内で反射される電磁波がより集中的に受電装置20に向うようにしてもよい。例えば、反射面95は、メタサーフェスとして構成されてもよい。このように、中長距離ワイヤレス給電において、受信器の受信電力を最大化するために、反射波を利用することができる。
FAロボット100(図1参照)では、ロボットアーム部110、ロボットハンド部120、ロボット100の本体等が金属を用いて構成されているため、反射波が多数存在している。そこで、図14の(A)に例示するように、この反射波を利用して、電磁波を受電装置20に向けて反射することができる。
近接センサ30は、磁界変化によって物体Wの位置を認識すると、その信号を生成するが、低電力消費モードでは、周期的な信号(H/L)が生成される。その信号を周期フィルタ40に通すことで、通常電力モードと同様の信号(L)を得ることができる。その信号を発生することで、制御器50は、誤認識することなく、近接センサ30の出力結果を活用できる。
制御器50は、マイコンと無線通信機能とを有し、近接センサ30から送られる信号をさらに外部の制御器60に送信して、工作機械70の制御に利用している。工作機械70は、機械100の全部または一部でもよく、または他の機械でもよい。
例えば、図3の(B)、図4の(B)で例示したように、近接センサ30については、6mW程度で駆動できる見込みであり、そのデータ伝送については1mW程度で駆動できる見込みである。従って、受電装置20によって約7mW程度のエネルギを近接センサ30に給電できれば、近接センサ30の完全ワイヤレス化を達成できる。マイクロ波方式のワイヤレス給電においては、1m先の給電対象に対して10mW程度までの電力を給電できるため、近接センサ30の完全ワイヤレス化は可能である。このことは、近接センサ30とは異なるセンサやアクチュエータについても同様である。
さらに、受電システム1には、他の電源を加えることも可能である。例えば、図15に例図するように、近接センサ30の電源電圧を最低限確保するために、近接センサ30に振動発電素子80を組み合わせることも可能である。
また、例えば、図4の(B)に例示したように、フィルタの定数は、近接センサ30の電源電圧(受信電力にほぼ等しい)に依存するため、周期フィルタ40や制御器50に対して、その情報をフィードフォワードするように、図1の(B)、図15に例図した受電システム1を拡張してもよい。
次に、図16乃至図20を参照して、図5乃至図10に例示した受電装置20の他の実施態様を説明する。この実施形態では、受電装置20は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、チップ・アンテナ及び逆Fアンテナのうちの少なくとも1つである。
デバイスの取り付け場所によっては、その筐体31から外部に大きく突出するようにダイポール・アンテナ210を延出させることが好ましくない場合がある。そこで、図16の(A)の実施例では、筐体31から突出する部分を抑えるように、比較的短めの長さでダイポール・アンテナ210を設けている。上記のように、このダイポール・アンテナ210は、従前の近接センサ30のコネクタ33を用いて構成されてもよい。
当業者には公知なように、近接センサ30の筐体31は、メーカーによって様々に構成され得る。本実施例では、既存の近接センサ30の筐体31をそのまま利用してスロット・アンテナ220を穿設してもいが、新規にスロットを有する筐体31を設計してもよい。
図17の(A)の実施例では、図8に例示した実施例との相違点として、筐体31が水平方向にまっすぐ延出するように、比較的大きめの筐体31を設けて、段差(図8の符号38参照)をなくして、十分な長さのスロットを穿設することを可能にしている。例えば、筐体31の長軸方向の全長(本体31の34側の端部から33側の端部まで)に対して、約70%、約80%、約90%、または約100%までの任意の長さのスロットを穿設してもよい。
なお、筐体31上にスロットを穿設する際、内部のコイルや回路等をオイルの侵入から保護するため、金属または樹脂によってコイルや回路等を覆うことは可能である。
図16の(B)、図17の(B)を対比すると、ダイポール・アンテナ210のアンテナの指向性とスロット・アンテナ220のアンテナの指向性が互いに交差することが確認された。これは、図6の(A)、(B)と、図9の(A)、(B)に例示した場合と同様である。
モノポール・アンテナ230の受電効率を確保するためには、その長さを確保する必要があるこのため、実施例では、筐体31を締め付け固定するためのナット34、35と座金36に近接して、モノポール・アンテナ230の一方の端部を筐体31上に取付けて、他方の端部を反対方向にまっすぐに延在させている。筐体31の延出方向とモノポール・アンテナ230の延出方向とを揃えることで、全体として、大きさが嵩張ることを抑えている。
図16の(B)、図18の(B)を対比すると、ダイポール・アンテナ210のアンテナの指向性とモノポール・アンテナ230のアンテナの指向性が同じ方向に現れることが確認された。ダイポール・アンテナ210に替えてモノポール・アンテナ230を用いた場合であっても、良好な指向性を得ることが確認された。さらに、図17の(B)、図18の(B)を対比すると、モノポール・アンテナ230のアンテナの指向性とスロット・アンテナ220のアンテナの指向性が互いに交差することが確認された。
図19の(A)に示すように、従前の近接センサ30の筐体31は長手方向に延在するが、その大きさをL0とする。近接センサ30の筐体31には、一方の端部側に締付け固定用の拡径部(符号34、35、36参照)を有し、他方の端部側にコネクタ33を有する。
従って、筐体31は3次元空間(X軸、Y軸及びZ軸方向)に大きさを有し、モノポール・アンテナ230を設けたことによる筐体31の3次元空間内の大きさの拡張を最大で実質的に1軸方向(X軸方向)に限定した。
短めのダイポール・アンテナ210だけを用いた場合、回転角度の変化に対しては、比較的小さな角度でだけ良好な受電効率を示し得ることがわかった。ただし、全体として、6方向で比較的良好な安定性を示し得る。
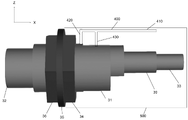
また、短絡部420と給電部430の幅や長さを調整してもよい。
また、短絡部420と給電部430の位置を交換してもよい。即ち、短絡部430と給電部420としてもよい。
また、本体部410を略棒状(幅狭)に構成するとともに、その長さを調整してもよい。本体部410には、湾曲部を導入してもよい。例えば、本体部410を略L字状に構成してもよい。
また、本体部410を略板状(幅広)に構成するとともに、その長さを調整してもよい。
また、デバイスの筐体31にダイポール・アンテナ、モノポール・アンテナ、逆Fアンテナ400またはチップ・アンテナを取付ける場合、細長いアンテナ部分を覆うカバー500(図31参照)を併用してもよい。カバー500は、アンテナ部分を周囲部品との接触等から保護するように、任意の大きさと形状を有することができる。カバー500は、使用時には取り外されるように、筐体31に対して着脱自在に構成されてもよい。
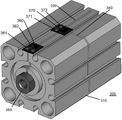
次に、アクチュエータに対して、スロット・アンテナを適用する場合について例示する。
第2のスロット340は、第1のスロット330に対して垂直二等分線として設けられてもよい。従って、第1のスロット330と第2のスロット340とは、互いに十字状に交差する。このように2つのスロット・アンテナ330、340を備えることで、回転に対して強くなる。
例えば、図21の(A)を参照すると、第1のスロット330は、上方の側面においてのみ延在する。第1のスロット330は、さらに、上方の側面と、右側の側面と、図示されていない左側の側面と、下方の側面の4つの側面上に延在してもよい。第1のスロット330の数は、複数でもよい。
また、第2のスロット340は、上方の側面と、右側の側面と、図示されていない左側の側面の3つの側面上に延在する。第2のスロット340は、さらに、上方の側面と、右側の側面と、図示されていない左側の側面と、下方の側面の4つの側面上に延在してもよい。第2のスロット340の数は、複数でもよい。
また、第1のスロット330と第2のスロット340は、互いに完全に分離しておらず、一部で交差している。ただし、他の実施例では、2つのスロット330、340は互いに完全に分離するように設けられてもよい。
ただし、好適には、第1のスロット330と第2のスロット340は、互いに90度の角度で直交する。
しかしながら、図21に例示した実施例において、さらに、筐体310上に、スロット・アンテナ330、340に加えて、またはスロット・アンテナ330、340に替えて、モノポール・アンテナやダイポール・アンテナやチップ・アンテナや逆Fアンテナ等を追加することは可能である。
図25乃至図30に例示したアクチュエータ300では、このスロット・アンテナ330、340の変更例に相当する。
アクチュエータ300の筐体310上には、第1のスロット・アンテナ330と第2の340が穿設されており、さらに各スロット・アンテナ330、340上には、受電効率を向上するための受電ICの基板360、370がそれぞれ設けられている。
具体的には、筐体310は、略六面体の構造を有し、その上面に逆Fアンテナ700を取付ける基板740、750を設けている。各基板740、750の大きさは、筐体310の上面(一側面)の大きさと比較して、ほぼ等しいか、小さな割合でのみ(X軸及びY軸方向で)拡張するようにしている。特に基板740の裏はグランド基板となっており、それが筐体310とショートしていて実効的にグランドサイズを大きくしている。
筐体31、310上に設けられる受電装置20は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、逆Fアンテナ及びチップ・アンテナ(線状または面状)のうちの少なくとも1つを有するように構成されてる。
好ましくは、受電装置20の2つのアンテナは、それぞれ、アンテナの指向性を相違させる。好ましくは、2つのアンテナは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する。
好適には、受電装置20が外部から突出する部分を有する場合(図8のX軸方向参照)であっても、その突出方向が、従前の配線方向と揃えるようにする(図2(C)の配線参照)。そのため、実質的には、従前のデバイスの使い勝手を損なうことがない。
好適には、デバイスの筐体31、310上に受電装置20を取付ける際、デバイスの作用面(図8の32、図21の350)とは干渉しないようにする。そのため、実質的には、従前のデバイスの使い勝手を損なうことがない。
受電装置20は、センサまたはアクチュエータであるデバイスの筐体として提供されてもよい。例えば、既存のセンサまたはアクチュエータに対して、その筐体の取替えだけで本実施例が適用されるようにしてもよい。例えば、図8、図16乃至図18に例示したセンサ30の筐体31や、図21及び図25に例示したアクチュエータ300の筐体310として提供されてもよい。
さらに、受電装置20は、給電対象のデバイス30と、さらに他の追加部品(図1(A)の符号40、50/図15の符号80参照)とを含むシステム1を内蔵した機械100として提供されてもよい。
CPUは、一般にソフトウエア(プログラム)を実行する装置として定義される。例えば、CPUは、ノイマン型のCPUである。CPUは、全体を制御する制御装置、演算装置、データを一時記憶するレジスタ、メモリとのインタフェース、周辺機器との入出力装置とのインタフェースなどを含むことができる。
メモリは、データを格納することができる装置として定義される。例えば、メモリは、CPUが直接アクセスできる一次記憶装置または入出力チャネル等を使ってアクセスされる二次記憶装置である。例えば、メモリは、任意のメディア、固定ディスク、揮発性または不揮発性ランダムアクセスメモリ、CD、DVD、フラッシュドライブ、対応するインターフェース(例えば、USBポート)に取り付けられるリムーバブルメディア(例えば、親指大の小型メモリ)または同様物を用いることができる。
コンピュータ・プログラム製品は、プログラムまたは機能若しくはファンクションまたはルーチンまたは実行可能オブジェクトとして実装されてもよい。
従って、上記制御を行うためのコンピュータ・プログラム製品に関する。
例えば、受電装置20または受電システム1の部位(構成要素)の各々は、その操作に必要な他の構成要素を含むことができ、さらに、本明細書に記載されたもの以外の機能を提供するために、追加の構成要素を含み得る。
従って、本特許請求の範囲は、本明細書に具体的に記載されている仕方とは異なるように実施可能なことを理解されたい。
(1)
センサまたはアクチュエータであるデバイスの本体を構成する筐体であって、
前記筐体は、無線での給電用に主に電界または磁界を発生する受電装置を取付け、
前記受電装置は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、チップ・アンテナ及び逆Fアンテナのうちの少なくとも1つであり、
前記筐体は3次元空間内に大きさを有し、前記受電装置を設けたことによる前記筐体の前記3次元空間内の大きさの拡張を最大で実質的に1軸方向に限定した。
例えば、受電装置を設けたことによる筐体の3次元空間内の大きさの拡張を実質的に1軸方向に限定する(ダイポール・アンテナ、モノポール・アンテナ、線状チップ・アンテナ及び逆Fアンテナの場合)、または、受電装置を設けたことによる筐体の3次元空間内の大きさの拡張を実質的になくす(スロット・アンテナ及び面状チップ・アンテナの場合)。後者の場合、筐体に切込みスロットを入れただけで受電できるので、アンテナレス・ワイヤレス給電デバイスを構成できる。
好ましくは、受電装置を設けることによって筐体の大きさを一方向で拡大させたとしても、その突出の割合を抑える。例えば、筐体のその方向の大きさの2倍以下、または1.5倍以下等にする。アンテナを着脱自在、分割自在、伸縮自在または折畳自在に構成することも可能である。従って、本提案の無線のデバイス30、300は、取付けスペースの拡張を回避して、従前の有線で給電されるデバイスとほぼ同様に用いることができる。
(2)
前記受電装置は、主に磁界を発生するスロット・アンテナと、主に電界を発生するダイポール・アンテナとを有し、
前記スロット・アンテナと前記ダイポール・アンテナは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと前記ダイポール・アンテナは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する(図8、図9参照)。
(3)
前記受電装置は、主に磁界を発生するスロット・アンテナと、主に電界を発生するモノポール・アンテナとを有し、
前記スロット・アンテナと、前記モノポール・アンテナとは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと、前記モノポール・アンテナとは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する(図17、図18参照)。
(4)
前記受電装置は、主に磁界を発生する第1のスロット・アンテナと、主に磁界を発生する第2のスロット・アンテナとを有し、
前記第1のスロット・アンテナと前記第2のスロット・アンテナは、互いに実質的に交差方向に整列し、
前記第1のスロット・アンテナと前記第2のスロット・アンテナは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する(図21、図22参照)。
(5)
前記受電装置は、主に磁界を発生するスロット・アンテナと、主に電界を発生する逆Fアンテナとを有し、
前記スロット・アンテナと、前記逆Fアンテナとは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと、前記逆Fアンテナとは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する(図8、図31、図21、図33参照)。
(6)
前記受電装置は、主に磁界を発生するスロット・アンテナと、チップ・アンテナとを有し、
前記スロット・アンテナと、前記チップ・アンテナとは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと、前記チップ・アンテナとは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する(図25参照)。
(7)
前記受電装置は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、チップ・アンテナ及び逆Fアンテナのうちの少なくとも2つのアンテナを有し、前記アンテナがそれぞれ互いに実質的に異なる放射または受電パターンを有するようにした。
特に、2つのアンテナ21、22は、それぞれのアンテナの指向性を相違させ、双方の指向性の弱まる領域を補完し合うように構成される。
(8)
前記受電装置は、スロット・アンテナであり、
前記受電装置を設けたことによる前記筐体の前記3次元空間内の大きさの拡張を実質的になくした。
特に、筐体にスロット・アンテナを設ける際、筐体の壁を厚さ方向に貫通するように、筐体の長軸方向に沿って穿設する(図17、図21、図25参照)。
(9)
前記筐体は、有線での給電用に配線を可能にする金属製のコネクタを有することができ(図8、図2の符号33を参照)、前記コネクタに前記受電装置を取付けた。
このため、筐体の一部(図8、図2符号33参照)の交換のみによって、無線での給電を可能にして、既存の筐体を最大限に利用可能にする。
(10)
前記筐体は、整流器と一体型のチップ・アンテナを備えた(図25、図26参照)。
(11)
前記筐体は、前記スロット・アンテナと、その中に電流を流すボルトとを備えた(図25、図26参照)。
(12)
センサまたはアクチュエータであるデバイスであって、
上記のデバイス用の筐体を有し、
マイクロ波方式に基づいてワイヤレス給電を行う。
(13)
センサまたはアクチュエータであるデバイスと、前記デバイスの出力を受け取るフィルタと、を含むシステムであって、
前記デバイスは、上記のデバイス用の筐体を有し、
前記フィルタは、前記センサまたはアクチュエータの既存の動作方式と比べて、5分の1程度の動費電力での動作を可能にした。
デバイスは、既存の動作方式と比べて、1分の1以下から5分の1程度までの間での電力での動作を可能にしてもよい。
デバイスは、ワイヤレス給電で駆動可能にするとともに、そのデータ伝送についてもワイヤレス化を可能にして、デバイスの完全ワイヤレス化を達成してもよい。
10 送電装置
20 受電装置
21 ダイポール・アンテナ
22 スロット・アンテナ
30 デバイス(センサ)
31 筐体
33 コネクタ
210 ダイポール・アンテナ
220 スロット・アンテナ
230 モノポール・アンテナ
300 デバイス(アクチュエータ)
310 筐体
330 スロット・アンテナ
340 スロット・アンテナ
363 整流器(チップアンテナ一体型)
373 整流器(チップアンテナ一体型)
400 逆Fアンテナ
700 逆Fアンテナ
Claims (13)
- センサまたはアクチュエータであるデバイスの本体を構成する筐体であって、
前記筐体は、無線での給電用に主に電界または磁界を発生する受電装置を取付け、
前記受電装置は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、チップ・アンテナ及び逆Fアンテナのうちの少なくとも1つであり、
前記筐体は3次元空間内に大きさを有し、前記受電装置を設けたことによる前記筐体の前記3次元空間内の大きさの拡張を最大で実質的に1軸方向に限定した、
デバイス用の筐体。 - 前記受電装置は、主に磁界を発生するスロット・アンテナと、主に電界を発生するダイポール・アンテナとを有し、
前記スロット・アンテナと前記ダイポール・アンテナは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと前記ダイポール・アンテナは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する、
請求項1に記載のデバイス用の筐体。 - 前記受電装置は、主に磁界を発生するスロット・アンテナと、主に電界を発生するモノポール・アンテナとを有し、
前記スロット・アンテナと、前記モノポール・アンテナとは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと、前記モノポール・アンテナとは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する、
請求項1に記載のデバイス用の筐体。 - 前記受電装置は、主に磁界を発生する第1のスロット・アンテナと、主に磁界を発生する第2のスロット・アンテナとを有し、
前記第1のスロット・アンテナと前記第2のスロット・アンテナは、互いに実質的に交差方向に整列し、
前記第1のスロット・アンテナと前記第2のスロット・アンテナは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する、
請求項1に記載のデバイス用の筐体。 - 前記受電装置は、主に磁界を発生するスロット・アンテナと、主に電界を発生する逆Fアンテナとを有し、
前記スロット・アンテナと、前記逆Fアンテナとは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと、前記逆Fアンテナとは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する、
請求項1に記載のデバイス用の筐体。 - 前記受電装置は、主に磁界を発生するスロット・アンテナと、チップ・アンテナとを有し、
前記スロット・アンテナと、前記チップ・アンテナとは、互いに実質的に同一方向に整列し、
前記スロット・アンテナと、前記チップ・アンテナとは、互いに実質的に直交した放射または受電パターンを有する全方位無指向性アンテナを構成する、
請求項1に記載のデバイス用の筐体。
- 前記受電装置は、ダイポール・アンテナ、スロット・アンテナ、モノポール・アンテナ、チップ・アンテナ及び逆Fアンテナのうちの少なくとも2つのアンテナを有し、前記アンテナがそれぞれ互いに実質的に異なる放射または受電パターンを有するようにした、請求項1に記載のデバイス用の筐体。
- 前記受電装置は、スロット・アンテナであり、
前記受電装置を設けたことによる前記筐体の前記3次元空間内の大きさの拡張を実質的になくした、
請求項1に記載のデバイス用の筐体。 - 前記筐体は、有線での給電用に配線を可能にする金属製のコネクタを有することができ、前記コネクタに前記受電装置を取付けた、請求項1~7のいずれか1項に記載のデバイス用の筐体。
- 前記筐体は、整流器と一体型のチップ・アンテナを備えた、請求項1~9のいずれか1項に記載のデバイス用の筐体。
- 前記筐体は、前記スロット・アンテナと、その中に電流を流すボルトとを備えた、請求項1~10のいずれか1項に記載のデバイス用の筐体。
- センサまたはアクチュエータであるデバイスであって、
請求項1~11のいずれか1項に記載のデバイス用の筐体を有し、
マイクロ波方式に基づいてワイヤレス給電を行う、デバイス。 - センサまたはアクチュエータであるデバイスと、前記デバイスの出力を受け取るフィルタと、を含むシステムであって、
前記デバイスは、請求項1~11のいずれか1項に記載のデバイス用の筐体を有し、
前記フィルタは、前記センサまたはアクチュエータの既存の動作方式と比べて、5分の1程度の動費電力での動作を可能にした、システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/038,241 US20240097489A1 (en) | 2020-11-24 | 2021-03-31 | Device housing for wirelessly receiving power, and device having the same |
| JP2022565038A JPWO2022113396A1 (ja) | 2020-11-24 | 2021-03-31 | |
| EP21897376.6A EP4241935A1 (en) | 2020-11-24 | 2021-03-31 | Housing for wireless power reception of device, and device having said housing |
| CN202180087311.4A CN116685446A (zh) | 2020-11-24 | 2021-03-31 | 器件的无线受电用的框体、和具有该框体的器件 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020194699 | 2020-11-24 | ||
| JP2020-194699 | 2020-11-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022113396A1 true WO2022113396A1 (ja) | 2022-06-02 |
Family
ID=81754190
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/014102 WO2022113396A1 (ja) | 2020-11-24 | 2021-03-31 | デバイスの無線受電用の筐体と、該筐体を有するデバイス |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240097489A1 (ja) |
| EP (1) | EP4241935A1 (ja) |
| JP (1) | JPWO2022113396A1 (ja) |
| CN (1) | CN116685446A (ja) |
| WO (1) | WO2022113396A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002299950A (ja) * | 2001-03-30 | 2002-10-11 | Nippon Antenna Co Ltd | 円筒スロットアンテナおよび偏波ダイバーシチアンテナ |
| JP2005514844A (ja) * | 2001-12-27 | 2005-05-19 | エイチアールエル ラボラトリーズ,エルエルシー | RF−MEMs同調型スロットアンテナ及びその製造方法 |
| JP2008183646A (ja) * | 2007-01-29 | 2008-08-14 | Koyo Electronics Ind Co Ltd | 無線近接センサ、ワーククランプ装置および加工装置 |
| JP2009530964A (ja) * | 2006-03-22 | 2009-08-27 | パワーキャスト コーポレイション | 無線パワーサプライの実装のための方法および機器 |
| JP2011211859A (ja) * | 2010-03-30 | 2011-10-20 | Ngk Spark Plug Co Ltd | 電源装置 |
| JP2014007629A (ja) | 2012-06-26 | 2014-01-16 | Kyushu Institute Of Technology | 近接センサ |
| WO2015132821A1 (ja) * | 2014-03-07 | 2015-09-11 | 三菱電機株式会社 | 部分放電センサー |
-
2021
- 2021-03-31 CN CN202180087311.4A patent/CN116685446A/zh active Pending
- 2021-03-31 US US18/038,241 patent/US20240097489A1/en active Pending
- 2021-03-31 EP EP21897376.6A patent/EP4241935A1/en active Pending
- 2021-03-31 WO PCT/JP2021/014102 patent/WO2022113396A1/ja active Application Filing
- 2021-03-31 JP JP2022565038A patent/JPWO2022113396A1/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002299950A (ja) * | 2001-03-30 | 2002-10-11 | Nippon Antenna Co Ltd | 円筒スロットアンテナおよび偏波ダイバーシチアンテナ |
| JP2005514844A (ja) * | 2001-12-27 | 2005-05-19 | エイチアールエル ラボラトリーズ,エルエルシー | RF−MEMs同調型スロットアンテナ及びその製造方法 |
| JP2009530964A (ja) * | 2006-03-22 | 2009-08-27 | パワーキャスト コーポレイション | 無線パワーサプライの実装のための方法および機器 |
| JP2008183646A (ja) * | 2007-01-29 | 2008-08-14 | Koyo Electronics Ind Co Ltd | 無線近接センサ、ワーククランプ装置および加工装置 |
| JP2011211859A (ja) * | 2010-03-30 | 2011-10-20 | Ngk Spark Plug Co Ltd | 電源装置 |
| JP2014007629A (ja) | 2012-06-26 | 2014-01-16 | Kyushu Institute Of Technology | 近接センサ |
| WO2015132821A1 (ja) * | 2014-03-07 | 2015-09-11 | 三菱電機株式会社 | 部分放電センサー |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022113396A1 (ja) | 2022-06-02 |
| US20240097489A1 (en) | 2024-03-21 |
| EP4241935A1 (en) | 2023-09-13 |
| CN116685446A (zh) | 2023-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6597076B2 (en) | System for wirelessly supplying a large number of actuators of a machine with electrical power | |
| US8772978B2 (en) | Power transmitting apparatus, power receiving apparatus, and wireless power transmission system | |
| US20040201361A1 (en) | Charging system for robot | |
| US20060071622A1 (en) | Ultra-compact, high-performance motor controller and method of using same | |
| US9837851B2 (en) | Wireless power transmitter for supporting multiple charging schemes | |
| WO2022113396A1 (ja) | デバイスの無線受電用の筐体と、該筐体を有するデバイス | |
| CN113840955B (zh) | 传感器设备和从传感器设备获得信息的电子设备 | |
| EP3182555B1 (en) | Contactless connector and contactless connector system | |
| JP2015136780A (ja) | コントローラ | |
| CN103109246A (zh) | 用于在自动化技术中确定和/或监测化学或物理过程变量的现场设备 | |
| US20150244055A1 (en) | Directional coupler and microwave heater provided with the same | |
| EP2665183B1 (en) | Input circuit for industrial control with low heat dissipation | |
| US20140176064A1 (en) | System | |
| US6600243B1 (en) | Battery pack and an information processing device in which the battery pack is detachable/attachable | |
| US20190091852A1 (en) | Robot and robot system | |
| CN207528357U (zh) | 具有小型化电子标签的紧固组件 | |
| US9970836B2 (en) | Multi-axial force sensor and grasper for sensing multi-axial force using the same | |
| EP1805886B1 (en) | Ultra-compact, high performance motor controller and method of using same | |
| KR102105688B1 (ko) | 무선 충전 장치 및 방법 | |
| KR102065293B1 (ko) | 주파수 스윕을 이용하는 수중 무선 전력 송수신장치를 구비한 수족관 | |
| CN106226743A (zh) | 一种低功耗雷达恒流源 | |
| CN206301975U (zh) | 电子设备及其曲面对接连接器 | |
| KR20160137294A (ko) | Rf 센서 장치 및 이에 포함되는 센서부 | |
| JP6575228B2 (ja) | アンテナモジュール及び無線通信装置 | |
| JP7429067B2 (ja) | 非接触給電装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21897376 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022565038 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18038241 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 2021897376 Country of ref document: EP Effective date: 20230609 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180087311.4 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |