WO2022113349A1 - 骨格認識装置、学習方法および学習プログラム - Google Patents
骨格認識装置、学習方法および学習プログラム Download PDFInfo
- Publication number
- WO2022113349A1 WO2022113349A1 PCT/JP2020/044524 JP2020044524W WO2022113349A1 WO 2022113349 A1 WO2022113349 A1 WO 2022113349A1 JP 2020044524 W JP2020044524 W JP 2020044524W WO 2022113349 A1 WO2022113349 A1 WO 2022113349A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- difference
- value
- loss function
- learning
- bone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/23—Recognition of whole body movements, e.g. for sport training
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/03—Recognition of patterns in medical or anatomical images
- G06V2201/033—Recognition of patterns in medical or anatomical images of skeletal patterns
Definitions
- the present invention relates to a skeleton recognition device and the like.
- the laser is irradiated about 2 million times per second, and the depth data of each irradiation point including the target person is obtained based on the traveling time (Time of Flight: ToF) of the laser.
- the laser method can acquire highly accurate depth data, but has the disadvantage that the hardware is complicated and expensive because it performs complicated configurations and processes such as laser scanning and ToF measurement.
- the image method that acquires RGB data of each pixel using a CMOS (Complementary Metal Oxide Semiconductor) imager makes it possible to perform 3D skeleton recognition using an inexpensive RGB camera.
- CMOS Complementary Metal Oxide Semiconductor
- FIG. 11 is a diagram for explaining the prior art 1.
- 2D features 2 representing each joint feature is acquired by applying 2D backbone processing 1a to each input image 1.
- the prior art 1 acquires aggregated volumes 3 by projecting each 2D features 2 onto a 3D cube according to camera parameters.
- Conventional technique 1 acquires processed volumes 5 representing the likelihood of each joint by inputting aggregated volumes 3 to V2V (neural network, P3) 4.
- processed volumes 5 corresponds to a heat map that represents the 3D likelihood of each joint.
- the prior art 1 acquires 3D skeleton information 7 by executing soft-argmax 6 for processed volumes 5.
- FIG. 12 is a diagram showing an example of a skeleton having a large error in some joints.
- the 3D skeleton information 10a is the 3D skeleton information corresponding to the correct answer value.
- the 3D skeleton information 10b corresponds to the skeleton recognition result output from soft-argmax6.
- the error of the left ankle joint is large, but the error of the other joints is small, so that the Loss value is not significantly affected on average. Therefore, a learning effect that improves the left ankle position is expected. Can't.
- the joint position is estimated based on the distance image in the first stage, and the consistency is evaluated with respect to the estimated joint position based on the human body model in the second stage. Correct the estimated joint position so that it is a good combination of joint positions.
- the joint position estimation accuracy is improved by performing the processing in two steps as described above.
- the skeleton recognition device has a recognition processing unit and a loss function calculation unit.
- the recognition processing unit inputs the teacher data into the learning model and calculates the output by forward propagation.
- the loss function calculation unit is the difference in bone length based on the skeleton information which is the correct answer value of the teacher data and the output result of the recognition processing unit, and the bones based on the skeleton information and the output result of the recognition processing unit. Calculate the value of the loss function based on the difference in angles.
- FIG. 1 is a diagram showing an example of a system according to this embodiment.
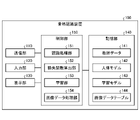
- FIG. 2 is a functional block diagram showing the configuration of the skeleton recognition device according to the present embodiment.
- FIG. 3 is a diagram showing an example of a data structure of teacher data.
- FIG. 4 is a diagram showing an example of the data structure of the human body model.
- FIG. 5 is a diagram for explaining the processing of the learning phase.
- FIG. 6 is a flowchart showing a processing procedure of the preprocessing phase of the skeleton recognition device.
- FIG. 7 is a flowchart showing a processing procedure of the learning phase of the skeleton recognition device.
- FIG. 8 is a flowchart showing a processing procedure of the inference phase of the skeleton recognition device.
- FIG. 1 is a diagram showing an example of a system according to this embodiment.
- FIG. 2 is a functional block diagram showing the configuration of the skeleton recognition device according to the present embodiment.
- FIG. 3 is a diagram showing an example
- the skeleton recognition device 100 executes learning of a learning model for performing skeleton recognition by executing the processing of the "pre-processing phase” and the “learning phase” using the teacher data. Further, in the "inference phase", the skeleton recognition device 100 outputs the skeleton recognition result of the person 15 based on the image data input from the camera 20 and the learned learning model.
- the display unit 130 is a display device that displays information output from the control unit 150.
- the display unit 130 corresponds to a liquid crystal display, an organic EL (Electro Luminescence) display, a touch panel, and the like.
- the storage unit 140 has a teacher data 141, a human body model 142, a learning model 143, and an image data table 144.
- the storage unit 140 is realized by, for example, a semiconductor memory element such as a RAM (Random Access Memory) or a flash memory (Flash Memory), or a storage device such as a hard disk or an optical disk.
- the human body model 142 is a predefined human body model in which a plurality of joints are defined and each joint is connected by a bone.
- FIG. 4 is a diagram showing an example of the data structure of the human body model. As shown in FIG. 4, this human body model 142 has joints A0, A1, A2, A3, A4, A5, A6, A7, A8, A9, A10, A11, A12, A13, A14, A15, A16, A17, It has A18, A19, A20, and A21. Further, in the human body model 142, 20 bones connecting each joint are defined.
- the control unit 150 includes a recognition processing unit 151, a loss function calculation unit 152, a learning unit 153, and an image data processing unit 154.
- the control unit 150 is realized by, for example, a CPU (Central Processing Unit) or an MPU (Micro Processing Unit). Further, the control unit 150 may be executed by an integrated circuit such as an ASIC (Application specific Integrated Circuit) or an FPGA (Field Programmable gate Array).
- ASIC Application specific Integrated Circuit
- FPGA Field Programmable gate Array
- the control unit 150 executes (1) pre-processing phase processing, (2) learning phase processing, and (3) inference phase processing in order.
- processing of the learning phase will be described, then “processing of the preprocessing phase” will be described, and finally, “processing of the inference phase” will be described.
- FIG. 5 is a diagram for explaining the processing of the learning phase.
- the processing of the recognition processing unit 151 in the learning phase will be described.
- the recognition processing unit 151 inputs the input data to the learning model 143, calculates a heatmap indicating the 3D likelihood of each joint, and executes soft-argmax to obtain the center of gravity of the heatmap. By doing so, the skeleton recognition result p is calculated.
- the recognition processing unit 151 outputs the skeleton recognition result to the loss function calculation unit 152.
- the recognition processing unit 151 calculates the skeleton recognition result corresponding to each input data by repeatedly executing the above processing for each input data included in the teacher data 141, and outputs the skeleton recognition result to the loss function calculation unit 152.
- a certain bone vector is indicated by b n .
- the bone length l the length of a certain bone is indicated by ln.
- the loss function calculation unit 152 determines the Loss value of the bone-to-bone angle from the difference between the bone-to-bone angle r and the correct answer value of the teacher data 141 (the correct answer value of the bone-to-bone angle) based on the equation (2). calculate.
- the Loss value of the angle between the bones is expressed as "L r ".
- Nr indicates the number of angles between bones.
- r pred i is the angle between the bones estimated from the bone vector b, and is the angle between the i-th bones.
- r gt i is the angle between the correct bones, and is the angle between the i-th bones.
- the loss function calculation unit 152 calculates the joint coordinate Loss value based on the skeleton recognition result p and the correct answer value (three-dimensional coordinates of each joint) of the teacher data 141.
- the joint coordinate Loss value is expressed as "L p ". Although the formula is omitted, L p is a value obtained by averaging the errors in the three-dimensional coordinates of each joint.
- the loss function calculation unit 152 integrates the Loss values based on the equation (3).
- the integrated Loss value is referred to as "L”.
- the loss function calculation unit 152 outputs the Loss value L to the learning unit 153.
- W l and wr included in the equation (3) are weights calculated in advance in the “pretreatment phase” so that L l and L r do not overfit .
- the loss function calculation unit 152 repeatedly executes the above processing every time the skeleton recognition result p is acquired from the recognition processing unit 151.
- the loss function calculation unit 152 calculates a feature ⁇ indicating the product of the transposed matrix BT of the matrix B and B.
- the feature ⁇ is represented by Eq. (5).
- the diagonal component of the feature ⁇ corresponds to the length of the bone, and the off-diagonal component corresponds to the angle between the bones.
- the loss function calculation unit 152 may calculate the bone length using the Euclidean distance.
- the loss function calculation unit 152 may calculate the angle between bones using cos similarity.
- the processing of the learning unit 153 in the learning phase will be described.
- the learning unit 153 repeatedly executes a process of learning (adjusting) the parameters of the learning model 143 by error back propagation so that the Loss value L is minimized.
- the learning unit 153 ends the adjustment of the parameters of the learning model 143 when the Loss value L converges.
- the Loss value L is calculated using "L l " regarding the error in bone length considering the human body and "L r " regarding the error in the angle between bones. Therefore, the degree of contribution to the Loss value L becomes high when a part of the joint is greatly displaced. Thereby, when the error of some joints is large, learning to improve the error can be executed.
- the "pre-processing phase” executed by the control unit 150 will be described.
- wl and wr used in the learning phase are calculated.
- the learning phase when integrating the Loss values using equation (3), the joint coordinate Loss value "L p " and the bone length Loss value “L p” are used so that L l and L r do not overfit.
- W l is calculated from the relative value with “L l “.
- Wr is calculated from the relative value of the joint coordinate Loss value "L p " and the bone length Loss value "L r ".
- control unit 150 executes the preprocessing phase
- the recognition processing unit 151, the loss function calculation unit 152, and the learning unit 153 execute the next processing.
- the processing of the loss function calculation unit 152 in the preprocessing phase will be described.
- the loss function calculation unit 152 has the same as the processing of the loss function calculation unit 152 in the learning phase, that is, the bone length Loss value “L l ”, the bone-to-bone angle Loss value “L r ”, and the joint coordinates Loss.
- the value "L p " is calculated respectively.
- the loss function calculation unit 152 outputs only the joint coordinate Loss value “L p ” to the learning unit 153.
- the loss function calculation unit 152 repeatedly executes the above processing every time the skeleton recognition result p is acquired from the recognition processing unit 151.
- the loss function calculation unit 152 When the loss function calculation unit 152 receives information from the learning unit 153 that the joint coordinate Loss value “L p ” has converged, the loss function calculation unit 152 “L l ” at the time when the joint coordinate Loss value “L p ” has converged.
- the orders of "L r " and “L p " are calculated respectively. Let the order of "L l “ be “o L l”. Let the order of "L r " be “o L r ". Let the order of "L p " be "o L p ".
- the loss function calculation unit 152 calculates "o Ll " and "o Lp " in the same manner.
- the loss function calculation unit 152 calculates the weight wl based on the equation (7).
- the weight wr is calculated based on the equation (8).
- the weights w l and w r are used in the learning phase. Since the loss function calculation unit 152 determines the weights wl and wr by the above processing, L l and L r do not always exceed the order of L p , so that L l and L r are exceeded . L l and L r can have an appropriate influence on learning while avoiding fitting.
- the learning unit 153 When the Loss value L p has converged, the learning unit 153 outputs to the loss function calculation unit 152 that the Loss value L p has converged, and ends the learning.
- the recognition processing unit 151 repeatedly executes the above processing every time input data is acquired from the image data processing unit 154.
- the image data processing unit 154 calculates input data based on each image data, and the input data is calculated by integrating a plurality of image data using other techniques. You may.
- the image data processing unit 154 acquires image data from the camera 20 every hour and repeatedly executes the above processing.
- FIG. 6 is a flowchart showing a processing procedure of the preprocessing phase of the skeleton recognition device.
- the recognition processing unit 151 of the skeleton recognition device 100 inputs the input data of the teacher data 141 into the learning model 143 (step S101).
- the recognition processing unit 151 calculates the skeleton recognition result by the forward propagation of the learning model 143 (step S102).
- the loss function calculation unit 152 of the skeleton recognition device 100 calculates the error of the joint coordinates as the Loss value (step S103).
- the loss function calculation unit 152 calculates an error in the length of the bone and an error in the angle between the bones as non-Loss values (step S104).
- the learning unit 153 of the skeleton recognition device 100 adjusts the parameters of the learning model 143 by error back propagation so as to minimize the Loss value (step S105).
- the loss function calculation unit 152 calculates the weights wl and wr based on the Loss value and the non-Loss value (step S106).
- the loss function calculation unit 152 outputs the weights w l and w r (step S107).
- the loss function calculation unit 152 of the skeleton recognition device 100 calculates an error in joint coordinates, an error in bone length, and an error in angle between bones as Loss values (step S203).
- the loss function calculation unit 152 integrates the Loss values using the weights w l and w r (step S204).
- FIG. 9 is a diagram for explaining the effect of this embodiment.
- the skeleton recognition result 30a is a skeleton recognition result by the prior art 1, and the angle of the left knee is abnormal.
- the skeleton recognition result 30b is a skeleton recognition result of the skeleton recognition device 100 according to the present embodiment, and the angle of the left knee is normalized.
- the hard disk device 207 has a recognition processing program 207a, a loss function calculation program 207b, a learning program 207c, and a learning data processing program 207d. Further, the CPU 201 reads out the programs 207a to 207d and develops them in the RAM 206.
- the recognition processing program 207a functions as the recognition processing process 206a.
- the loss function calculation program 207b functions as the loss function calculation process 206b.
- the learning program 207c functions as a learning process 206c.
- the image data processing program 207d functions as an image data processing process 206d.
- the processing of the recognition processing process 206a corresponds to the processing of the recognition processing unit 151.
- the processing of the loss function calculation process 206b corresponds to the processing of the loss function calculation unit 152.
- the processing of the learning process 206c corresponds to the processing of the learning unit 153.
- the processing of the image data processing process 206d corresponds to the processing of the image data processing unit 154.
- each program 207a to 207d does not necessarily have to be stored in the hard disk device 207 from the beginning.
- each program is stored in a "portable physical medium" such as a flexible disk (FD), a CD-ROM, a DVD, a magneto-optical disk, or an IC card inserted in the computer 200. Then, the computer 200 may read and execute each of the programs 207a to 207d.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Artificial Intelligence (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Human Computer Interaction (AREA)
- Psychiatry (AREA)
- Social Psychology (AREA)
- Image Analysis (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/044524 WO2022113349A1 (ja) | 2020-11-30 | 2020-11-30 | 骨格認識装置、学習方法および学習プログラム |
| CN202080106146.8A CN116324870B (zh) | 2020-11-30 | 2020-11-30 | 骨骼识别装置、学习方法以及学习程序 |
| JP2022565004A JP7571796B2 (ja) | 2020-11-30 | 2020-11-30 | 骨格認識装置、学習方法および学習プログラム |
| EP20963613.3A EP4254322A4 (en) | 2020-11-30 | 2020-11-30 | SKELETON RECOGNITION APPARATUS, LEARNING METHOD AND LEARNING PROGRAM |
| US18/193,700 US20230237849A1 (en) | 2020-11-30 | 2023-03-31 | Skeleton recognition device, training method, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/044524 WO2022113349A1 (ja) | 2020-11-30 | 2020-11-30 | 骨格認識装置、学習方法および学習プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/193,700 Continuation US20230237849A1 (en) | 2020-11-30 | 2023-03-31 | Skeleton recognition device, training method, and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022113349A1 true WO2022113349A1 (ja) | 2022-06-02 |
Family
ID=81754148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/044524 Ceased WO2022113349A1 (ja) | 2020-11-30 | 2020-11-30 | 骨格認識装置、学習方法および学習プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230237849A1 (https=) |
| EP (1) | EP4254322A4 (https=) |
| JP (1) | JP7571796B2 (https=) |
| CN (1) | CN116324870B (https=) |
| WO (1) | WO2022113349A1 (https=) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7807693B1 (ja) * | 2024-12-26 | 2026-01-28 | キヤノンマーケティングジャパン株式会社 | 情報処理装置、情報処理方法、プログラム |
| CN120708291B (zh) * | 2025-08-22 | 2025-10-31 | 中国矿业大学 | 一种基于持续学习的骨骼行为识别方法和系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004013474A (ja) | 2002-06-06 | 2004-01-15 | Japan Science & Technology Corp | 身体モデル生成方法、身体モデル生成プログラム及びそれを記録した記録媒体、身体モデルデータを記録した記録媒体 |
| JP2015167008A (ja) | 2013-07-30 | 2015-09-24 | キヤノン株式会社 | 姿勢推定装置、姿勢推定方法およびプログラム |
| JP2019079487A (ja) * | 2017-10-25 | 2019-05-23 | 日本電信電話株式会社 | パラメータ最適化装置、パラメータ最適化方法、プログラム |
| JP2019191974A (ja) * | 2018-04-26 | 2019-10-31 | 株式会社 ディー・エヌ・エー | 情報処理装置、情報処理プログラム、及び、情報処理方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017187641A1 (ja) * | 2016-04-28 | 2017-11-02 | 富士通株式会社 | 骨格推定装置、骨格推定方法および骨格推定プログラム |
| JP2021503134A (ja) * | 2017-11-15 | 2021-02-04 | グーグル エルエルシーGoogle LLC | 画像深度とエゴモーション予測ニューラルネットワークの教師なし学習 |
| CN108324503A (zh) * | 2018-03-16 | 2018-07-27 | 燕山大学 | 基于肌骨模型和阻抗控制的康复机器人自适应控制方法 |
| CN109064487B (zh) * | 2018-07-02 | 2021-08-06 | 中北大学 | 一种基于Kinect骨骼节点位置追踪的人体姿势比较方法 |
| US10796482B2 (en) * | 2018-12-05 | 2020-10-06 | Snap Inc. | 3D hand shape and pose estimation |
| TW202026846A (zh) * | 2019-01-04 | 2020-07-16 | 香港商成境科技有限公司 | 動作捕捉方法 |
| CN110264551B (zh) * | 2019-06-20 | 2022-10-11 | 合肥工业大学 | 一种运动重定向方法及系统 |
-
2020
- 2020-11-30 EP EP20963613.3A patent/EP4254322A4/en active Pending
- 2020-11-30 WO PCT/JP2020/044524 patent/WO2022113349A1/ja not_active Ceased
- 2020-11-30 CN CN202080106146.8A patent/CN116324870B/zh active Active
- 2020-11-30 JP JP2022565004A patent/JP7571796B2/ja active Active
-
2023
- 2023-03-31 US US18/193,700 patent/US20230237849A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004013474A (ja) | 2002-06-06 | 2004-01-15 | Japan Science & Technology Corp | 身体モデル生成方法、身体モデル生成プログラム及びそれを記録した記録媒体、身体モデルデータを記録した記録媒体 |
| JP2015167008A (ja) | 2013-07-30 | 2015-09-24 | キヤノン株式会社 | 姿勢推定装置、姿勢推定方法およびプログラム |
| JP2019079487A (ja) * | 2017-10-25 | 2019-05-23 | 日本電信電話株式会社 | パラメータ最適化装置、パラメータ最適化方法、プログラム |
| JP2019191974A (ja) * | 2018-04-26 | 2019-10-31 | 株式会社 ディー・エヌ・エー | 情報処理装置、情報処理プログラム、及び、情報処理方法 |
Non-Patent Citations (5)
| Title |
|---|
| B. WANDT ET AL.: "A kinematic chain space for monocular motion capture", ECCV WORK-SHOP, 2018 |
| G. MOON ET AL.: "V2V-PoseNet:Voxel-to-Voxel Prediction Network for Accurate 3D Hand and Human Pose Estimation from a Single Depth Map", CVPR, 2018 |
| ISKAKOV KARIM; BURKOV EGOR; LEMPITSKY VICTOR; MALKOV YURY: "Learnable Triangulation of Human Pose", 2019 IEEE/CVF INTERNATIONAL CONFERENCE ON COMPUTER VISION (ICCV), IEEE, 27 October 2019 (2019-10-27), pages 7717 - 7726, XP033723627, DOI: 10.1109/ICCV.2019.00781 * |
| K. ISKAKOV ET AL.: "Learnable Triangulation of Human Pose", ICCV, 2019 |
| See also references of EP4254322A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7571796B2 (ja) | 2024-10-23 |
| EP4254322A4 (en) | 2023-11-01 |
| JPWO2022113349A1 (https=) | 2022-06-02 |
| US20230237849A1 (en) | 2023-07-27 |
| EP4254322A1 (en) | 2023-10-04 |
| CN116324870A (zh) | 2023-06-23 |
| CN116324870B (zh) | 2025-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10713814B2 (en) | Eye tracking method and system | |
| US20230290101A1 (en) | Data processing method and apparatus, electronic device, and computer-readable storage medium | |
| US11004230B2 (en) | Predicting three-dimensional articulated and target object pose | |
| EP3243162B1 (en) | Gaze detection offset for gaze tracking models | |
| JP7345664B2 (ja) | 不確実性を有するランドマーク位置推定のための画像処理システムおよび方法 | |
| US20180278823A1 (en) | Auto-exposure technologies using odometry | |
| US20230116779A1 (en) | Computer implemented methods and devices for determining dimensions and distances of head features | |
| US10037624B2 (en) | Calibrating object shape | |
| US9858501B2 (en) | Reliability acquiring apparatus, reliability acquiring method, and reliability acquiring program | |
| KR20130025906A (ko) | 얼굴 특징점 위치 보정 장치, 얼굴 특징점 위치 보정 방법, 및 얼굴 특징점 위치 보정 프로그램을 기록한 컴퓨터 판독가능 기록 매체 | |
| CN113902855B (zh) | 基于摄像头设备的三维人脸重建方法及相关设备 | |
| CN115471863A (zh) | 三维姿态的获取方法、模型训练方法和相关设备 | |
| JP6288770B2 (ja) | 顔検出方法、顔検出システム、および顔検出プログラム | |
| US20230237849A1 (en) | Skeleton recognition device, training method, and storage medium | |
| CN114724211A (zh) | 一种融合无参注意力机制的视线估计方法 | |
| CN118050087A (zh) | 一种设备测温方法及其相关设备 | |
| JP7489247B2 (ja) | プログラム、情報処理方法、情報処理装置及びモデル生成方法 | |
| JP7852753B2 (ja) | 学習モデル生成装置、学習モデル生成方法、及びプログラム | |
| JP6468755B2 (ja) | 特徴点検出システム、特徴点検出方法、および特徴点検出プログラム | |
| CN117642772A (zh) | 使用单个相机的实时多人三维姿态跟踪的增强技术 | |
| CN113916223A (zh) | 定位方法及装置、设备、存储介质 | |
| JP7843003B2 (ja) | 情報処理方法、プログラム及び情報処理装置 | |
| US20240362849A1 (en) | Computer-readable recording medium storing training program, generation program, training method, and generation method | |
| CA3122315C (en) | Eye tracking method and system | |
| Verbin et al. | Category-Level Object Size Estimation from a Single RGB Image |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20963613 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022565004 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020963613 Country of ref document: EP Effective date: 20230630 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 202080106146.8 Country of ref document: CN |