WO2021260810A1 - Detection device and passenger conveyor - Google Patents
Detection device and passenger conveyor Download PDFInfo
- Publication number
- WO2021260810A1 WO2021260810A1 PCT/JP2020/024662 JP2020024662W WO2021260810A1 WO 2021260810 A1 WO2021260810 A1 WO 2021260810A1 JP 2020024662 W JP2020024662 W JP 2020024662W WO 2021260810 A1 WO2021260810 A1 WO 2021260810A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensor
- detection
- chain
- signal
- detection light
- Prior art date
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B29/00—Safety devices of escalators or moving walkways
Definitions
- the present disclosure relates to a detection device for detecting chain elongation and a passenger conveyor.
- Patent Document 1 describes a device for detecting the elongation of a chain on a passenger conveyor.
- the device described in Patent Document 1 includes a distance sensor.
- the distance sensor is located on the side of the step. The light from the distance sensor is emitted horizontally and hits the side of the step.
- the detection device emits a first sensor that emits a first detection light and outputs a first signal according to the reflected light of the first detection light, and a second detection light that emits the second detection light.
- a second sensor that outputs a second signal according to the reflected light of light, a support device that supports the first sensor and the second sensor, and is attached to and detachable from a specific fixed object provided on the passenger conveyor, and the first sensor.
- a detection means for detecting the elongation of the chain based on the first signal from and the second signal from the second sensor.
- the first detection light is emitted downward from the first sensor so as to pass between the skirt guard and the step placed in the normal position from above while the support device is fixed to the fixing target.
- the second detection light radiates downward from the second sensor at a position away from the skirt guard from the first detection light so as to hit the step placed in the normal position from above with the support device fixed to the fixing target. Will be done.
- the passenger conveyor includes a skirt guard, a step for moving the side of the skirt guard, a chain connected to the step, and a detection device for detecting the elongation of the chain.
- the detection device emits a first sensor that emits the first detection light and outputs a first signal according to the reflected light of the first detection light, and emits a second detection light and the reflected light of the second detection light.
- a second sensor that outputs a second signal according to the above, and a detection means that detects the elongation of the chain based on the first signal from the first sensor and the second signal from the second sensor are provided.
- the first detection light is emitted downward from the first sensor so as to pass between the skirt guard and the step placed in the normal position from above.
- the second detection light is emitted downward from the second sensor at a position away from the skirt guard from the first detection light so as to hit the step arranged at the normal position from above.
- chain elongation can be easily detected even on an existing passenger conveyor.
- FIG. It is a figure which shows the example of the passenger conveyor in Embodiment 1.
- FIG. It is a top view which shows the example of a step and the internal structure of a skirt guard. It is a figure for demonstrating the inspection method of a step chain by a maintenance person. It is a figure which shows the AA cross section of FIG. It is a figure which shows the example of the detection device. It is a top view which shows the state of a step when the step chain is not stretched. It is a figure which shows the example of the signal from the sensor obtained when a step moves in the state shown in FIG. It is a top view which shows the state of a step when an extension occurs in a step chain.
- FIG. 1 is a diagram showing an example of a passenger conveyor according to the first embodiment.
- FIG. 1 shows an escalator as an example of a passenger conveyor.
- Other examples of passenger conveyors, such as moving walkways, are omitted in detail.
- Step 1 moves between the skirt guards 2.
- the inner panel 3 extends diagonally upward from the skirt guard 2.
- the stainless steel or glass panel 4 extends upward from the inner panel 3.
- the passenger on step 1 grabs the moving handrail 5.
- the moving handrail 5 moves along the edge of the panel 4.
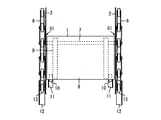
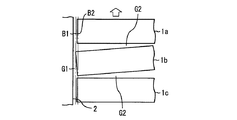
- FIG. 2 is a plan view showing an example of the internal structure of step 1 and the skirt guard 2.
- the passenger conveyor is provided with a pair of step chains 6 for towing step 1.
- a large number of step shafts 7 are provided between the step chains 6.
- Step 1 is provided on each step axis 7.
- a large number of steps 1 are connected to the step chain 6.
- Step 1 includes a tread plate 8, a support frame 9, and a pair of rollers 10. Passengers get on the tread plate 8. A gap G1 is formed between the tread plate 8 and the skirt guard 2.
- the support frame 9 supports the tread plate 8 from below.
- the support frame 9 is fixed to the step shaft 7 below the tread plate 8.
- the roller 10 is rotatably provided on the support frame 9.
- the passenger conveyor is provided with a pair of rails 11 and a pair of rails 12.
- the roller 10 in step 1 rolls on the rail 11. Further, as shown in FIG. 2, a large number of rollers 13 are rotatably provided on the step chain 6. The roller 13 rolls on the rail 12.
- the posture of step 1 is controlled by the rail 11 and the rail 12.
- the roller 13 may be rotatably provided on the step shaft 7.
- the step chain 6 is stretched due to wear or the like. If the step chain 6 is extended, the step 1 may come into contact with the skirt guard 2. Further, if the step 1 comes into contact with the skirt guard 2, the step chain 6 may be damaged. Therefore, the elevator maintenance staff periodically inspects whether or not the step chain 6 is stretched.
- FIG. 3 is a diagram for explaining an inspection method of the step chain 6 by a maintenance person.
- FIG. 3 is a view of the entrance / exit at the bottom of the passenger conveyor as viewed from above.
- the maintenance staff uses a detection device 15 for detecting the elongation of the step chain 6.
- the detection device 15 is a device used by maintenance personnel at various sites. Therefore, it is preferable that the detection device 15 has a size that is easy for maintenance personnel to carry.
- FIG. 4 is a diagram showing a cross section taken along the line AA of FIG.
- FIG. 5 is a diagram showing an example of the detection device 15.
- the detection device 15 includes a sensor 16, a sensor 17, a support device 18, a control device 19, and a notification device 20.
- the sensor 16 is, for example, a reflection type photoelectric sensor.
- the sensor 16 emits the detection light.
- the detection light emitted from the sensor 16 is indicated by an arrow B1.
- the sensor 16 receives the reflected light of the emitted detection light.
- the sensor 16 outputs an on signal according to the received reflected light. For example, the sensor 16 outputs an on signal when it receives a reflected light in an amount larger than a specific threshold value.
- the sensor 17 is, for example, a reflection type photoelectric sensor.
- the sensor 17 emits the detection light.
- the detection light emitted from the sensor 17 is indicated by an arrow B2.
- the sensor 17 receives the reflected light of the emitted detection light.
- the sensor 17 outputs an on signal according to the received reflected light. For example, the sensor 17 outputs an on signal when it receives a reflected light in an amount larger than a specific threshold value.
- the sensor 16 and the sensor 17 are supported by the support device 18.
- the support device 18 can be attached to and detached from, for example, the skirt guard 2. If the skirt guard 2 is made of an iron plate, the support device 18 may include a magnet 18a. As another example, the support device 18 may include a suction cup. 3 and 4 show a state in which the support device 18 is fixed to the skirt guard 2. At least a part of the detection device 15 is arranged directly above step 1.
- step 1 moves to the side of the skirt guard 2.
- the detection light from the sensor 16 is radiated downward from the sensor 16 so as to pass between the skirt guard 2 and the step 1 arranged at the normal position.
- the normal position is a position where step 1 is arranged by design.
- the detection light from the sensor 16 is radiated vertically downward so that the distance L1 from the skirt guard 2 is 0.5 mm.
- the detection light from the sensor 17 is radiated downward from the sensor 17 so as to hit the end of step 1 arranged at the normal position from above.
- the detected light from the sensor 17 passes through a position farther from the skirt guard 2 than the detected light from the sensor 16.
- the detection light from the sensor 17 is radiated vertically downward so that the distance L2 from the skirt guard 2 is 4 mm.
- the control device 19 has a function of detecting the elongation of the step chain 6 based on the on signal from the sensor 16 and the on signal from the sensor 17.
- the control device 19 includes a storage unit 21, a calculation unit 22, a determination unit 23, a detection unit 24, and a notification control unit 25.
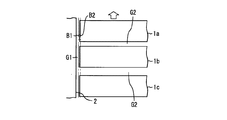
- FIG. 6 is a plan view showing the state of step 1 when the step chain 6 is not stretched.
- step 1 is arranged in the normal position.
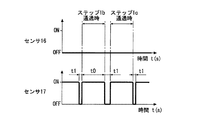
- FIG. 7 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG. The arrow shown in FIG. 6 indicates the moving direction of step 1.
- step chain 6 If the step chain 6 is not stretched, the detected light from the sensor 16 passes between the skirt guard 2 and the step 1. Therefore, as shown in FIG. 7, the on signal is not output from the sensor 16.
- a gap G2 is formed between adjacent steps 1. If the step chain 6 is not stretched, the steps 1 are arranged at equal intervals. Further, if the step 1 is arranged in the normal position, the detection light from the sensor 17 continues to hit the end portion of the step 1 while the step 1 passes below the detection device 15. Therefore, the on signal is periodically output from the sensor 17 as shown in FIG. That is, the time t0 at which the on signal is output is always constant. Similarly, the time t1 is always constant. The time t1 is the time from when the on signal is no longer output until the next on signal is output.
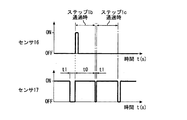
- FIG. 8 is a plan view showing the state of step 1 when the step chain 6 is stretched.
- FIG. 8 shows an example in which the step chains 6 arranged on both sides of the step 1 are stretched.
- FIG. 9 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG.
- step 1a, step 1b, and step 1c are three consecutive steps in a plurality of steps 1.
- step 1b and step 1c When elongation occurs in the portion of the step chain 6 arranged between step 1b and step 1c, the gap G2 between step 1b and step 1c widens. No inclination occurs in step 1b and step 1c. Therefore, the detection light from the sensor 16 does not hit step 1.
- the detection light from the sensor 16 passes between the skirt guard 2 and step 1. As shown in FIG. 9, the on signal is not output from the sensor 16.
- step 1b the time from when the detection light from the sensor 17 does not hit step 1b to when it hits step 1c becomes long. That is, in the example shown in FIGS. 8 and 9, the time t1 immediately after the passage of step 1b is longer than the time t1 immediately before the passage of step 1b. The time t1 immediately after the passage of step 1b is longer than the time t1 immediately after the passage of step 1c.
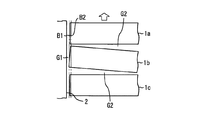
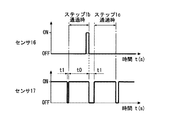
- FIG. 10 is a plan view showing the state of step 1 when the step chain 6 is stretched.
- FIG. 10 shows an example in which the step chain 6 arranged on one side of the step 1 is stretched. Further, FIG. 10 shows an example in which step 1b is tilted so that the right end portion of step 1b is displaced rearward due to the extension of the step chain 6 on one side.
- the direction of step 1 is based on the direction of the person who rides on step 1 while facing the traveling direction.
- FIG. 11 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG.
- step 1b When step 1b is tilted as shown in FIG. 10, when step 1b passes below the detection device 15, the detection light from the sensor 16 hits step 1b. Therefore, when the rear end of step 1b passes below the detection device 15, the on signal is output from the sensor 16.
- the gap G2 between step 1a and step 1b is narrowed, and the gap G2 between step 1b and step 1c is widened. Therefore, the time from when the detection light from the sensor 17 does not hit step 1a to when it hits step 1b is shortened. The time from when the detection light from the sensor 17 does not hit step 1b to when it hits step 1c becomes long. That is, in the example shown in FIGS. 10 and 11, the time t1 immediately before the passage of step 1b is shorter than the time t1 shown in FIG. On the other hand, the time t1 immediately after the passage of step 1b is longer than the time t1 shown in FIG.
- FIG. 12 is a plan view showing the state of step 1 when the step chain 6 is stretched.
- FIG. 12 shows an example in which the step chain 6 arranged on one side of the step 1 is stretched. Further, FIG. 12 shows an example in which step 1b is tilted so that the left end portion of step 1b is displaced rearward due to the extension of the step chain 6 on one side.
- FIG. 13 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG.
- step 1b When step 1b is tilted as shown in FIG. 12, when step 1b passes below the detection device 15, the detection light from the sensor 16 hits step 1b. Therefore, when the front end of step 1b passes below the detection device 15, the on signal is output from the sensor 16.
- the gap G2 between step 1a and step 1b widens, and the gap G2 between step 1b and step 1c narrows. Therefore, the time from when the detection light from the sensor 17 does not hit step 1a to when it hits step 1b becomes long.
- the time from when the detection light from the sensor 17 does not hit step 1b to when it hits step 1c is shortened. That is, in the example shown in FIGS. 12 and 13, the time t1 immediately before the passage of step 1b is longer than the time t1 shown in FIG. On the other hand, the time t1 immediately after the passage of step 1b is shorter than the time t1 shown in FIG.
- FIG. 14 is a flowchart showing an operation example of the detection device 15.
- the calculation unit 22 calculates the time when the ON signal is not output from the sensor 17, that is, the time t1 (S101).
- the storage unit 21 stores a specific reference range for time t1.
- the determination unit 23 determines whether or not the time t1 calculated by the calculation unit 22 is within the reference range (S102). For example, the storage unit 21 stores the time t2 as the lower limit value of the time t1.
- the storage unit 21 stores the time t3 as the upper limit value of the time t1. In such a case, the determination unit 23 determines in S102 whether or not the time t1 calculated by the calculation unit 22 satisfies the equation (1). t2 ⁇ t1 ⁇ t3 ... (1)
- step 1 is moving below the detection device 15 in the state shown in FIG. 6, the determination unit 23 determines that the time t1 is within the reference range. When the determination unit 23 determines Yes in S102, it determines whether or not an ON signal is output from the sensor 16 (S103). If step 1 is moving below the detection device 15 in the state shown in FIG. 6, the on signal is not output from the sensor 16. Therefore, it is determined as No in S103. If No is determined in S103, the detection unit 24 does not detect that the step chain 6 is stretched (S104).
- the time t1 calculated by the calculation unit 22 is out of the reference range, it is determined as No in S102.
- step 1 is moving below the detection device 15 in the state shown in FIG. 8, FIG. 10, or FIG. 12, it is determined as No in S102.
- No is determined in S102 immediately after step 1b passes below the detection device 15.
- No is determined in S102 immediately before and immediately after step 1b passes below the detection device 15.
- No is determined in S102 immediately before and immediately after step 1b passes below the detection device 15.
- the detection unit 24 detects the elongation of the step chain 6 (S105).
- the determination unit 23 determines Yes in S103. If it is determined to be Yes in S103, the detection unit 24 detects the elongation of the step chain 6 (S105).
- FIG. 14 shows an example in which the processing of S103 is performed after the processing of S102.
- the processing of S103 may be performed before the processing of S102.
- the determination unit 23 determines whether or not the ON signal is output from the sensor 16 after S101. In this determination, if step 1 is moving below the detection device 15 in the state shown in FIG. 10 or FIG. 12, it is determined to be Yes. On the other hand, if step 1 is moving below the detection device 15 in the state shown in FIG. 8, it is not determined as Yes in this determination. When the step 1 moves below the detection device 15 in the state shown in FIG. 8, the elongation is detected in S105 when the time t1 deviates from the reference range.
- the processing of S102 is performed after the processing of S103, it can be detected separately whether the step chains 6 on both sides are stretched or the step chains 6 on one side are stretched.
- the notification unit 20 notifies that the extension of the step chain 6 is detected by the detection unit 24 (S106).
- the lamp is attached to the support device 18 as the alarm 20.
- the notification control unit 25 turns on the lamp in S106.
- the sensor 16 emits the detection light from above step 1.
- the sensor 17 emits the detection light from above step 1.
- the detection unit 24 detects the elongation of the step chain 6 based on the on signal from the sensor 16 and the on signal from the sensor 17. Therefore, the maintenance staff can detect the elongation of the step chain 6 by attaching the detection device 15 to, for example, the skirt guard 2. With the detection device 15, the elongation of the step chain 6 can be easily detected even with the existing passenger conveyor.
- control device 19 may be provided in other terminals carried by maintenance personnel.
- FIG. 15 is a diagram showing another example of the detection device 15.
- FIG. 15 is a diagram corresponding to the cross section taken along the line AA of FIG.
- the detection device 15 includes a sensor 16, a sensor 17, a support device 18, a control device 19, and a level 26.
- the detection device 15 may further include a notification device 20.
- the support device 18 includes a fixing member 27, a support member 28, and an adjusting mechanism 29.
- the fixing member 27 is removable from the inner panel 3.
- the inner panel 3 is an example of a member extending upward from the skirt guard 2.
- the fixing member 27 may be attached to and detached from a member arranged above the skirt guard 2, for example, the panel 4.
- the support device 18 may be attached to and detached from another fixing target.
- the sensor 16 and the sensor 17 are provided on the support member 28.
- the fixing member 27 and the support member 28 are connected by an adjusting mechanism 29.
- the adjusting mechanism 29 is a mechanism for adjusting the orientation of the support member 28. That is, in the example shown in FIG. 15, with the fixing member 27 fixed to the inner panel 3, the direction of the detection light emitted from the sensor 16 and the direction of the detection light emitted from the sensor 17 are adjusted by the adjusting mechanism 29. Can be adjusted.
- the level 26 is for visually recognizing that the plane orthogonal to the detection light from the sensor 16 is horizontally arranged.
- the detection light from the sensor 16 and the detection light from the sensor 17 are parallel to each other.
- the maintenance staff can confirm by looking at the level 26 that the detection light from the sensor 16 and the detection light from the sensor 17 are radiated vertically downward.
- the detection device 15 may include a level 26.
- the detection device 15 is arranged above the step 1 in which the step 1 moves horizontally.
- the detection device 15 may be arranged above step 1 which moves diagonally upward or diagonally downward.
- the sensor 17 is adjusted so that the on signal is periodically output from the sensor 17 when the step 1 arranged at the normal position passes below the detection device 15.
- each part indicated by reference numerals 21 to 25 indicates a function of the control device 19.
- FIG. 16 is a diagram showing an example of hardware resources of the control device 19.
- the control device 19 includes a processing circuit 30 including, for example, a processor 31 and a memory 32 as hardware resources.
- the function of the storage unit 21 is realized by the memory 32.
- As the memory 32 a semiconductor memory or the like can be adopted.
- the control device 19 realizes the functions of the respective parts shown by the reference numerals 22 to 25 by executing the program stored in the memory 32 by the processor 31.
- FIG. 17 is a diagram showing another example of the hardware resource of the control device 19.
- the control device 19 includes, for example, a processing circuit 30 including a processor 31, a memory 32, and dedicated hardware 33.
- FIG. 17 shows an example in which a part of the functions of the control device 19 is realized by the dedicated hardware 33. All the functions of the control device 19 may be realized by the dedicated hardware 33.
- the dedicated hardware 33 a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof can be adopted.
Landscapes
- Escalators And Moving Walkways (AREA)
Abstract
This detection device (15) comprises a sensor (16), a second sensor (17), a support device (18), and a detection unit (24). First detection light is emitted downward from the sensor (16) so as to pass, from above, between a skirt guard (2) and a step (1) that is positioned at a normal position. Second detection light is emitted downward from the second sensor (17) at a position further from the skirt guard (2) that the first detection light so as to hit, from above, the step (1) that is positioned at a normal position.
Description
本開示は、チェーンの伸びを検出するための検出装置と乗客コンベアとに関する。
The present disclosure relates to a detection device for detecting chain elongation and a passenger conveyor.
特許文献1に、乗客コンベアにおいて、チェーンの伸びを検出するための装置が記載されている。特許文献1に記載された装置は、距離センサを備える。距離センサは、ステップの側方に配置される。距離センサからの光は水平方向に放射され、ステップの側面に当たる。
Patent Document 1 describes a device for detecting the elongation of a chain on a passenger conveyor. The device described in Patent Document 1 includes a distance sensor. The distance sensor is located on the side of the step. The light from the distance sensor is emitted horizontally and hits the side of the step.
特許文献1に記載された装置では、距離センサをスカートガードの内側に配置する必要がある。このため、当該装置を既設の乗客コンベアに取り付ける場合は、大幅な改修工事が必要になってしまう。特許文献1に記載された装置では、既設の乗客コンベアにおいてチェーンの伸びを検出することが困難であった。
In the device described in Patent Document 1, it is necessary to arrange the distance sensor inside the skirt guard. Therefore, when the device is attached to an existing passenger conveyor, a major repair work is required. With the device described in Patent Document 1, it is difficult to detect the elongation of the chain on the existing passenger conveyor.
本開示は、上述のような課題を解決するためになされた。本開示の目的は、既設の乗客コンベアでもチェーンの伸びを容易に検出することができる検出装置を提供することである。本開示の他の目的は、チェーンの伸びを容易に検出することが可能な乗客コンベアを提供することである。
This disclosure was made to solve the above-mentioned problems. An object of the present disclosure is to provide a detection device capable of easily detecting the elongation of a chain even on an existing passenger conveyor. Another object of the present disclosure is to provide a passenger conveyor capable of easily detecting chain elongation.
本開示に係る検出装置は、第1検出光を放射し、当該第1検出光の反射光に応じて第1信号を出力する第1センサと、第2検出光を放射し、当該第2検出光の反射光に応じて第2信号を出力する第2センサと、第1センサ及び第2センサを支持し、乗客コンベアに備えられた特定の固定対象に着脱可能な支持装置と、第1センサからの第1信号及び第2センサからの第2信号に基づいて、チェーンの伸びを検出する検出手段と、を備える。第1検出光は、支持装置が固定対象に固定された状態で、スカートガードと正常位置に配置されたステップとの間を上方から通過するように第1センサから下向きに放射される。第2検出光は、支持装置が固定対象に固定された状態で、正常位置に配置されたステップに上方から当たるように第1検出光よりスカートガードから離れた位置で第2センサから下向きに放射される。
The detection device according to the present disclosure emits a first sensor that emits a first detection light and outputs a first signal according to the reflected light of the first detection light, and a second detection light that emits the second detection light. A second sensor that outputs a second signal according to the reflected light of light, a support device that supports the first sensor and the second sensor, and is attached to and detachable from a specific fixed object provided on the passenger conveyor, and the first sensor. A detection means for detecting the elongation of the chain based on the first signal from and the second signal from the second sensor. The first detection light is emitted downward from the first sensor so as to pass between the skirt guard and the step placed in the normal position from above while the support device is fixed to the fixing target. The second detection light radiates downward from the second sensor at a position away from the skirt guard from the first detection light so as to hit the step placed in the normal position from above with the support device fixed to the fixing target. Will be done.
本開示に係る乗客コンベアは、スカートガードと、スカートガードの側方を移動するステップと、ステップに連結されたチェーンと、チェーンの伸びを検出するための検出装置と、を備える。検出装置は、第1検出光を放射し、当該第1検出光の反射光に応じて第1信号を出力する第1センサと、第2検出光を放射し、当該第2検出光の反射光に応じて第2信号を出力する第2センサと、第1センサからの第1信号及び第2センサからの第2信号に基づいて、チェーンの伸びを検出する検出手段と、を備える。第1検出光は、スカートガードと正常位置に配置されたステップとの間を上方から通過するように、第1センサから下向きに放射される。第2検出光は、正常位置に配置されたステップに上方から当たるように、第1検出光よりスカートガードから離れた位置で第2センサから下向きに放射される。
The passenger conveyor according to the present disclosure includes a skirt guard, a step for moving the side of the skirt guard, a chain connected to the step, and a detection device for detecting the elongation of the chain. The detection device emits a first sensor that emits the first detection light and outputs a first signal according to the reflected light of the first detection light, and emits a second detection light and the reflected light of the second detection light. A second sensor that outputs a second signal according to the above, and a detection means that detects the elongation of the chain based on the first signal from the first sensor and the second signal from the second sensor are provided. The first detection light is emitted downward from the first sensor so as to pass between the skirt guard and the step placed in the normal position from above. The second detection light is emitted downward from the second sensor at a position away from the skirt guard from the first detection light so as to hit the step arranged at the normal position from above.
本開示によれば、既設の乗客コンベアにおいても、チェーンの伸びを容易に検出することができる。
According to the present disclosure, chain elongation can be easily detected even on an existing passenger conveyor.
以下に、図面を参照して詳細な説明を行う。重複する説明は、適宜簡略化或いは省略する。各図において、同一の符号は同一の部分又は相当する部分を示す。
Below, a detailed explanation will be given with reference to the drawings. Overlapping description will be simplified or omitted as appropriate. In each figure, the same reference numeral indicates the same part or the corresponding part.
実施の形態1.
図1は、実施の形態1における乗客コンベアの例を示す図である。図1は、乗客コンベアの一例としてエスカレーターを示す。動く歩道といった乗客コンベアの他の例については、詳細な説明を省略する。Embodiment 1.
FIG. 1 is a diagram showing an example of a passenger conveyor according to the first embodiment. FIG. 1 shows an escalator as an example of a passenger conveyor. Other examples of passenger conveyors, such as moving walkways, are omitted in detail.
図1は、実施の形態1における乗客コンベアの例を示す図である。図1は、乗客コンベアの一例としてエスカレーターを示す。動く歩道といった乗客コンベアの他の例については、詳細な説明を省略する。
FIG. 1 is a diagram showing an example of a passenger conveyor according to the first embodiment. FIG. 1 shows an escalator as an example of a passenger conveyor. Other examples of passenger conveyors, such as moving walkways, are omitted in detail.
乗客は、ステップ1に乗って上部の乗降口と下部の乗降口を移動する。ステップ1の両側に、スカートガード2が設けられる。ステップ1は、スカートガード2の間を移動する。インナーパネル3は、スカートガード2から斜め上方に延びる。ステンレス製或いはガラス製のパネル4は、インナーパネル3から上方に延びる。ステップ1に乗った乗客は、移動手摺5を掴む。移動手摺5は、パネル4の縁に沿って移動する。
Passengers take step 1 and move between the upper entrance and the lower entrance. Skirt guards 2 are provided on both sides of step 1. Step 1 moves between the skirt guards 2. The inner panel 3 extends diagonally upward from the skirt guard 2. The stainless steel or glass panel 4 extends upward from the inner panel 3. The passenger on step 1 grabs the moving handrail 5. The moving handrail 5 moves along the edge of the panel 4.
図2は、ステップ1とスカートガード2の内部の構造との例を示す平面図である。乗客コンベアには、ステップ1を牽引するための一対のステップチェーン6が備えられる。ステップチェーン6の間に、多数のステップ軸7が設けられる。各ステップ軸7にステップ1が設けられる。ステップチェーン6に多数のステップ1が連結される。
FIG. 2 is a plan view showing an example of the internal structure of step 1 and the skirt guard 2. The passenger conveyor is provided with a pair of step chains 6 for towing step 1. A large number of step shafts 7 are provided between the step chains 6. Step 1 is provided on each step axis 7. A large number of steps 1 are connected to the step chain 6.
ステップ1は、踏板8、支持枠9、及び一対のローラ10を備える。乗客は、踏板8の上に乗る。踏板8とスカートガード2との間に隙間G1が形成される。支持枠9は、踏板8を下方から支持する。支持枠9は、踏板8の下方においてステップ軸7に固定される。ローラ10は、支持枠9に回転可能に設けられる。
Step 1 includes a tread plate 8, a support frame 9, and a pair of rollers 10. Passengers get on the tread plate 8. A gap G1 is formed between the tread plate 8 and the skirt guard 2. The support frame 9 supports the tread plate 8 from below. The support frame 9 is fixed to the step shaft 7 below the tread plate 8. The roller 10 is rotatably provided on the support frame 9.
乗客コンベアには、一対のレール11及び一対のレール12が備えられる。ステップ1のローラ10は、レール11の上を転がる。また、図2に示すように、ステップチェーン6に多数のローラ13が回転可能に設けられる。ローラ13は、レール12の上を転がる。レール11及びレール12により、ステップ1の姿勢が制御される。ローラ13は、ステップ軸7に回転可能に設けられても良い。
The passenger conveyor is provided with a pair of rails 11 and a pair of rails 12. The roller 10 in step 1 rolls on the rail 11. Further, as shown in FIG. 2, a large number of rollers 13 are rotatably provided on the step chain 6. The roller 13 rolls on the rail 12. The posture of step 1 is controlled by the rail 11 and the rail 12. The roller 13 may be rotatably provided on the step shaft 7.
ステップチェーン6には、摩耗等によって伸びが発生する。ステップチェーン6が延びると、ステップ1がスカートガード2に接触する恐れがある。また、ステップ1がスカートガード2に接触すると、ステップチェーン6が破損する恐れもある。このため、エレベーターの保守員は、ステップチェーン6に伸びが発生しているか否かを定期的に点検する。
The step chain 6 is stretched due to wear or the like. If the step chain 6 is extended, the step 1 may come into contact with the skirt guard 2. Further, if the step 1 comes into contact with the skirt guard 2, the step chain 6 may be damaged. Therefore, the elevator maintenance staff periodically inspects whether or not the step chain 6 is stretched.
図3は、保守員によるステップチェーン6の点検方法を説明するための図である。図3は、乗客コンベアの下部の乗降口を上方から見た図である。保守員は、乗客コンベアを点検する際に、ステップチェーン6の伸びを検出するための検出装置15を用いる。検出装置15は、保守員が様々な現場で使用する装置である。このため、検出装置15は、保守員が携帯し易い大きさであることが好ましい。
FIG. 3 is a diagram for explaining an inspection method of the step chain 6 by a maintenance person. FIG. 3 is a view of the entrance / exit at the bottom of the passenger conveyor as viewed from above. When inspecting the passenger conveyor, the maintenance staff uses a detection device 15 for detecting the elongation of the step chain 6. The detection device 15 is a device used by maintenance personnel at various sites. Therefore, it is preferable that the detection device 15 has a size that is easy for maintenance personnel to carry.
図4は、図3のA-A断面を示す図である。図5は、検出装置15の例を示す図である。検出装置15は、センサ16、センサ17、支持装置18、制御装置19、及び報知器20を備える。
FIG. 4 is a diagram showing a cross section taken along the line AA of FIG. FIG. 5 is a diagram showing an example of the detection device 15. The detection device 15 includes a sensor 16, a sensor 17, a support device 18, a control device 19, and a notification device 20.
センサ16は、例えば反射型の光電センサである。センサ16は、検出光を放射する。図4では、センサ16から放射された検出光を矢印B1で示している。センサ16は、放射した検出光の反射光を受ける。センサ16は、受けた反射光に応じてオン信号を出力する。例えば、センサ16は、特定の閾値より多い量の反射光を受けると、オン信号を出力する。
The sensor 16 is, for example, a reflection type photoelectric sensor. The sensor 16 emits the detection light. In FIG. 4, the detection light emitted from the sensor 16 is indicated by an arrow B1. The sensor 16 receives the reflected light of the emitted detection light. The sensor 16 outputs an on signal according to the received reflected light. For example, the sensor 16 outputs an on signal when it receives a reflected light in an amount larger than a specific threshold value.
センサ17は、例えば反射型の光電センサである。センサ17は、検出光を放射する。図4では、センサ17から放射された検出光を矢印B2で示している。センサ17は、放射した検出光の反射光を受ける。センサ17は、受けた反射光に応じてオン信号を出力する。例えば、センサ17は、特定の閾値より多い量の反射光を受けると、オン信号を出力する。
The sensor 17 is, for example, a reflection type photoelectric sensor. The sensor 17 emits the detection light. In FIG. 4, the detection light emitted from the sensor 17 is indicated by an arrow B2. The sensor 17 receives the reflected light of the emitted detection light. The sensor 17 outputs an on signal according to the received reflected light. For example, the sensor 17 outputs an on signal when it receives a reflected light in an amount larger than a specific threshold value.
センサ16とセンサ17とは、支持装置18に支持される。支持装置18は、例えばスカートガード2に着脱可能である。スカートガード2が鉄板で形成されていれば、支持装置18は磁石18aを備えても良い。他の例として、支持装置18は吸盤を備えても良い。図3及び図4は、支持装置18がスカートガード2に固定された状態を示す。検出装置15は、少なくとも一部がステップ1の直上に配置される。
The sensor 16 and the sensor 17 are supported by the support device 18. The support device 18 can be attached to and detached from, for example, the skirt guard 2. If the skirt guard 2 is made of an iron plate, the support device 18 may include a magnet 18a. As another example, the support device 18 may include a suction cup. 3 and 4 show a state in which the support device 18 is fixed to the skirt guard 2. At least a part of the detection device 15 is arranged directly above step 1.
図3及び図4に示すように、ステップ1はスカートガード2の側方を移動する。図3及び図4に示す状態では、センサ16からの検出光は、スカートガード2と正常位置に配置されたステップ1との間を通過するように、センサ16から下向きに放射される。一例として、上記正常位置は、ステップ1が設計上配置される位置である。例えば、センサ16からの検出光は、スカートガード2からの距離L1が0.5mmとなるように、鉛直下向きに放射される。
As shown in FIGS. 3 and 4, step 1 moves to the side of the skirt guard 2. In the state shown in FIGS. 3 and 4, the detection light from the sensor 16 is radiated downward from the sensor 16 so as to pass between the skirt guard 2 and the step 1 arranged at the normal position. As an example, the normal position is a position where step 1 is arranged by design. For example, the detection light from the sensor 16 is radiated vertically downward so that the distance L1 from the skirt guard 2 is 0.5 mm.
図3及び図4に示す状態では、センサ17からの検出光は、正常位置に配置されたステップ1の端部に上方から当たるように、センサ17から下向きに放射される。センサ17からの検出光は、センサ16からの検出光よりスカートガード2から離れた位置を通過する。例えば、センサ17からの検出光は、スカートガード2からの距離L2が4mmとなるように、鉛直下向きに放射される。
In the state shown in FIGS. 3 and 4, the detection light from the sensor 17 is radiated downward from the sensor 17 so as to hit the end of step 1 arranged at the normal position from above. The detected light from the sensor 17 passes through a position farther from the skirt guard 2 than the detected light from the sensor 16. For example, the detection light from the sensor 17 is radiated vertically downward so that the distance L2 from the skirt guard 2 is 4 mm.
制御装置19は、センサ16からのオン信号及びセンサ17からのオン信号に基づいて、ステップチェーン6の伸びを検出する機能を有する。このような機能を実現するため、制御装置19は、記憶部21、演算部22、判定部23、検出部24、及び報知制御部25を備える。
The control device 19 has a function of detecting the elongation of the step chain 6 based on the on signal from the sensor 16 and the on signal from the sensor 17. In order to realize such a function, the control device 19 includes a storage unit 21, a calculation unit 22, a determination unit 23, a detection unit 24, and a notification control unit 25.
図6は、ステップチェーン6に伸びが発生していない時のステップ1の状態を示す平面図である。図6に示す例では、ステップ1は正常位置に配置されている。図7は、ステップ1が図6に示す状態で移動する時に得られるセンサ16及び17からの信号の例を示す図である。図6に示す矢印は、ステップ1の移動方向を示す。
FIG. 6 is a plan view showing the state of step 1 when the step chain 6 is not stretched. In the example shown in FIG. 6, step 1 is arranged in the normal position. FIG. 7 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG. The arrow shown in FIG. 6 indicates the moving direction of step 1.
ステップチェーン6に伸びが発生していなければ、センサ16からの検出光は、スカートガード2とステップ1との間を通過する。このため、図7に示すように、センサ16からオン信号は出力されない。
If the step chain 6 is not stretched, the detected light from the sensor 16 passes between the skirt guard 2 and the step 1. Therefore, as shown in FIG. 7, the on signal is not output from the sensor 16.
ステップ1が水平に移動する区間では、隣接するステップ1間に隙間G2が形成される。ステップチェーン6に伸びが発生していなければ、ステップ1は等間隔に配置される。また、ステップ1が正常位置に配置されていれば、センサ17からの検出光はステップ1が検出装置15の下方を通過する間、ステップ1の端部に当たり続ける。このため、センサ17からは、図7に示すようにオン信号が周期的に出力される。即ち、オン信号が出力される時間t0は常に一定である。同様に、時間t1は常に一定である。時間t1は、オン信号が出力されなくなってから次のオン信号が出力されるまでの時間である。
In the section where step 1 moves horizontally, a gap G2 is formed between adjacent steps 1. If the step chain 6 is not stretched, the steps 1 are arranged at equal intervals. Further, if the step 1 is arranged in the normal position, the detection light from the sensor 17 continues to hit the end portion of the step 1 while the step 1 passes below the detection device 15. Therefore, the on signal is periodically output from the sensor 17 as shown in FIG. That is, the time t0 at which the on signal is output is always constant. Similarly, the time t1 is always constant. The time t1 is the time from when the on signal is no longer output until the next on signal is output.
図8は、ステップチェーン6に伸びが発生した時のステップ1の状態を示す平面図である。図8は、ステップ1の両側に配置されたステップチェーン6に伸びが発生した例を示す。図9は、ステップ1が図8に示す状態で移動する時に得られるセンサ16及び17からの信号の例を示す図である。
FIG. 8 is a plan view showing the state of step 1 when the step chain 6 is stretched. FIG. 8 shows an example in which the step chains 6 arranged on both sides of the step 1 are stretched. FIG. 9 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG.
例えば、ステップ1a、ステップ1b、及びステップ1cが、複数のステップ1の中の連続する3つのステップである場合を考える。ステップチェーン6のうちステップ1bとステップ1cとの間に配置された部分に伸びが発生すると、ステップ1bとステップ1cとの隙間G2が広がる。なお、ステップ1bとステップ1cとに傾きは生じない。このため、センサ16からの検出光は、ステップ1に当たらない。センサ16からの検出光は、スカートガード2とステップ1との間を通過する。図9に示すように、センサ16からオン信号は出力されない。
For example, consider the case where step 1a, step 1b, and step 1c are three consecutive steps in a plurality of steps 1. When elongation occurs in the portion of the step chain 6 arranged between step 1b and step 1c, the gap G2 between step 1b and step 1c widens. No inclination occurs in step 1b and step 1c. Therefore, the detection light from the sensor 16 does not hit step 1. The detection light from the sensor 16 passes between the skirt guard 2 and step 1. As shown in FIG. 9, the on signal is not output from the sensor 16.
一方、ステップ1bとステップ1cとの隙間G2が広がると、センサ17からの検出光がステップ1bに当たらなくなってからステップ1cに当たるまでの時間が長くなる。即ち、図8及び図9に示す例では、ステップ1bが通過した直後の時間t1は、ステップ1bが通過する直前の時間t1より長い。ステップ1bが通過した直後の時間t1は、ステップ1cが通過した直後の時間t1より長い。
On the other hand, if the gap G2 between step 1b and step 1c is widened, the time from when the detection light from the sensor 17 does not hit step 1b to when it hits step 1c becomes long. That is, in the example shown in FIGS. 8 and 9, the time t1 immediately after the passage of step 1b is longer than the time t1 immediately before the passage of step 1b. The time t1 immediately after the passage of step 1b is longer than the time t1 immediately after the passage of step 1c.
図10は、ステップチェーン6に伸びが発生した時のステップ1の状態を示す平面図である。図10は、ステップ1の片側に配置されたステップチェーン6に伸びが発生した例を示す。また、図10は、片側のステップチェーン6に伸びが発生することによって、ステップ1bの右側の端部が後方にずれるようにステップ1bが傾いた例を示す。なお、本説明において、ステップ1の向きは、進行方向を向いてステップ1に乗った人の向きを基準にしている。図11は、ステップ1が図10に示す状態で移動する時に得られるセンサ16及び17からの信号の例を示す図である。
FIG. 10 is a plan view showing the state of step 1 when the step chain 6 is stretched. FIG. 10 shows an example in which the step chain 6 arranged on one side of the step 1 is stretched. Further, FIG. 10 shows an example in which step 1b is tilted so that the right end portion of step 1b is displaced rearward due to the extension of the step chain 6 on one side. In this description, the direction of step 1 is based on the direction of the person who rides on step 1 while facing the traveling direction. FIG. 11 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG.
ステップ1bが図10に示すように傾くと、ステップ1bが検出装置15の下方を通過する際に、センサ16からの検出光がステップ1bに当たる。このため、ステップ1bの後側の端部が検出装置15の下方を通過する際に、センサ16からオン信号が出力される。
When step 1b is tilted as shown in FIG. 10, when step 1b passes below the detection device 15, the detection light from the sensor 16 hits step 1b. Therefore, when the rear end of step 1b passes below the detection device 15, the on signal is output from the sensor 16.
一方、検出装置15の直下を通過する部分に関しては、ステップ1aとステップ1bとの隙間G2は狭まり、ステップ1bとステップ1cとの隙間G2は広がる。このため、センサ17からの検出光がステップ1aに当たらなくなってからステップ1bに当たるまでの時間は短くなる。センサ17からの検出光がステップ1bに当たらなくなってからステップ1cに当たるまでの時間は長くなる。即ち、図10及び図11に示す例では、ステップ1bが通過する直前の時間t1は、図7に示す時間t1より短い。一方、ステップ1bが通過した直後の時間t1は、図7に示す時間t1より長い。
On the other hand, with respect to the portion that passes directly under the detection device 15, the gap G2 between step 1a and step 1b is narrowed, and the gap G2 between step 1b and step 1c is widened. Therefore, the time from when the detection light from the sensor 17 does not hit step 1a to when it hits step 1b is shortened. The time from when the detection light from the sensor 17 does not hit step 1b to when it hits step 1c becomes long. That is, in the example shown in FIGS. 10 and 11, the time t1 immediately before the passage of step 1b is shorter than the time t1 shown in FIG. On the other hand, the time t1 immediately after the passage of step 1b is longer than the time t1 shown in FIG.
図12は、ステップチェーン6に伸びが発生した時のステップ1の状態を示す平面図である。図12は、ステップ1の片側に配置されたステップチェーン6に伸びが発生した例を示す。また、図12は、片側のステップチェーン6に伸びが発生することによって、ステップ1bの左側の端部が後方にずれるようにステップ1bが傾いた例を示す。図13は、ステップ1が図12に示す状態で移動する時に得られるセンサ16及び17からの信号の例を示す図である。
FIG. 12 is a plan view showing the state of step 1 when the step chain 6 is stretched. FIG. 12 shows an example in which the step chain 6 arranged on one side of the step 1 is stretched. Further, FIG. 12 shows an example in which step 1b is tilted so that the left end portion of step 1b is displaced rearward due to the extension of the step chain 6 on one side. FIG. 13 is a diagram showing an example of signals from sensors 16 and 17 obtained when step 1 moves in the state shown in FIG.
ステップ1bが図12に示すように傾くと、ステップ1bが検出装置15の下方を通過する際に、センサ16からの検出光がステップ1bに当たる。このため、ステップ1bの前側の端部が検出装置15の下方を通過する際に、センサ16からオン信号が出力される。
When step 1b is tilted as shown in FIG. 12, when step 1b passes below the detection device 15, the detection light from the sensor 16 hits step 1b. Therefore, when the front end of step 1b passes below the detection device 15, the on signal is output from the sensor 16.
一方、検出装置15の直下を通過する部分に関しては、ステップ1aとステップ1bとの隙間G2は広がり、ステップ1bとステップ1cとの隙間G2は狭まる。このため、センサ17からの検出光がステップ1aに当たらなくなってからステップ1bに当たるまでの時間は長くなる。センサ17からの検出光がステップ1bに当たらなくなってからステップ1cに当たるまでの時間は短くなる。即ち、図12及び図13に示す例では、ステップ1bが通過する直前の時間t1は、図7に示す時間t1より長い。一方、ステップ1bが通過した直後の時間t1は、図7に示す時間t1より短い。
On the other hand, with respect to the portion that passes directly under the detection device 15, the gap G2 between step 1a and step 1b widens, and the gap G2 between step 1b and step 1c narrows. Therefore, the time from when the detection light from the sensor 17 does not hit step 1a to when it hits step 1b becomes long. The time from when the detection light from the sensor 17 does not hit step 1b to when it hits step 1c is shortened. That is, in the example shown in FIGS. 12 and 13, the time t1 immediately before the passage of step 1b is longer than the time t1 shown in FIG. On the other hand, the time t1 immediately after the passage of step 1b is shorter than the time t1 shown in FIG.
図14は、検出装置15の動作例を示すフローチャートである。検出装置15では、演算部22が、センサ17からオン信号が出力されていない時間、即ち時間t1を演算する(S101)。記憶部21には、時間t1に対する特定の基準範囲が記憶されている。判定部23は、演算部22によって演算された時間t1が、当該基準範囲内であるか否かを判定する(S102)。例えば、記憶部21に、時間t1の下限値として時間t2が記憶される。記憶部21に、時間t1の上限値として時間t3が記憶される。かかる場合、判定部23は、S102において、演算部22によって演算された時間t1が(1)式を満たすか否かを判定する。
t2≦t1≦t3 …(1) FIG. 14 is a flowchart showing an operation example of thedetection device 15. In the detection device 15, the calculation unit 22 calculates the time when the ON signal is not output from the sensor 17, that is, the time t1 (S101). The storage unit 21 stores a specific reference range for time t1. The determination unit 23 determines whether or not the time t1 calculated by the calculation unit 22 is within the reference range (S102). For example, the storage unit 21 stores the time t2 as the lower limit value of the time t1. The storage unit 21 stores the time t3 as the upper limit value of the time t1. In such a case, the determination unit 23 determines in S102 whether or not the time t1 calculated by the calculation unit 22 satisfies the equation (1).
t2≤t1≤t3 ... (1)
t2≦t1≦t3 …(1) FIG. 14 is a flowchart showing an operation example of the
t2≤t1≤t3 ... (1)
ステップ1が図6に示す状態で検出装置15の下方を移動していれば、判定部23は、時間t1が基準範囲内であると判定する。判定部23は、S102でYesと判定すると、センサ16からオン信号が出力されたか否かを判定する(S103)。ステップ1が図6に示す状態で検出装置15の下方を移動していれば、センサ16からオン信号は出力されない。このため、S103ではNoと判定される。S103でNoと判定されると、検出部24は、ステップチェーン6に伸びが発生していることを検出しない(S104)。
If step 1 is moving below the detection device 15 in the state shown in FIG. 6, the determination unit 23 determines that the time t1 is within the reference range. When the determination unit 23 determines Yes in S102, it determines whether or not an ON signal is output from the sensor 16 (S103). If step 1 is moving below the detection device 15 in the state shown in FIG. 6, the on signal is not output from the sensor 16. Therefore, it is determined as No in S103. If No is determined in S103, the detection unit 24 does not detect that the step chain 6 is stretched (S104).
一方、演算部22によって演算された時間t1が基準範囲から外れていれば、S102でNoと判定される。例えば、ステップ1が図8、図10、或いは図12に示す状態で検出装置15の下方を移動していれば、S102でNoと判定される。具体的に、図8及び図9に示す例では、ステップ1bが検出装置15の下方を通過した直後にS102でNoと判定される。図10及び図11に示す例では、ステップ1bが検出装置15の下方を通過する直前と直後とにS102でNoと判定される。図12及び図13に示す例では、ステップ1bが検出装置15の下方を通過する直前と直後とにS102でNoと判定される。S102でNoと判定されると、検出部24は、ステップチェーン6の伸びを検出する(S105)。
On the other hand, if the time t1 calculated by the calculation unit 22 is out of the reference range, it is determined as No in S102. For example, if step 1 is moving below the detection device 15 in the state shown in FIG. 8, FIG. 10, or FIG. 12, it is determined as No in S102. Specifically, in the example shown in FIGS. 8 and 9, No is determined in S102 immediately after step 1b passes below the detection device 15. In the example shown in FIGS. 10 and 11, No is determined in S102 immediately before and immediately after step 1b passes below the detection device 15. In the example shown in FIGS. 12 and 13, No is determined in S102 immediately before and immediately after step 1b passes below the detection device 15. If No is determined in S102, the detection unit 24 detects the elongation of the step chain 6 (S105).
また、センサ16からオン信号が出力されると、判定部23はS103でYesと判定する。S103でYesと判定されると、検出部24は、ステップチェーン6の伸びを検出する(S105)。
Further, when the ON signal is output from the sensor 16, the determination unit 23 determines Yes in S103. If it is determined to be Yes in S103, the detection unit 24 detects the elongation of the step chain 6 (S105).
図14は、S102の処理の後にS103の処理が行われる例を示す。S103の処理は、S102の処理の前に行われても良い。かかる場合、判定部23は、S101の後に、センサ16からオン信号が出力されたか否かを判定する。この判定では、ステップ1が図10或いは図12に示す状態で検出装置15の下方を移動していれば、Yesと判定される。一方、ステップ1が図8に示す状態で検出装置15の下方を移動していれば、この判定ではYesと判定されない。ステップ1が図8に示す状態で検出装置15の下方を移動する場合は、時間t1が基準範囲から外れることによってS105で伸びが検出される。S103の処理の後にS102の処理を行う場合は、両側のステップチェーン6に伸びが発生したのか、或いは片側のステップチェーン6に伸びが発生したのかを区別して検出できる。
FIG. 14 shows an example in which the processing of S103 is performed after the processing of S102. The processing of S103 may be performed before the processing of S102. In such a case, the determination unit 23 determines whether or not the ON signal is output from the sensor 16 after S101. In this determination, if step 1 is moving below the detection device 15 in the state shown in FIG. 10 or FIG. 12, it is determined to be Yes. On the other hand, if step 1 is moving below the detection device 15 in the state shown in FIG. 8, it is not determined as Yes in this determination. When the step 1 moves below the detection device 15 in the state shown in FIG. 8, the elongation is detected in S105 when the time t1 deviates from the reference range. When the processing of S102 is performed after the processing of S103, it can be detected separately whether the step chains 6 on both sides are stretched or the step chains 6 on one side are stretched.
検出部24によってステップチェーン6の伸びが検出されたことは、報知器20から報知される(S106)。例えば、報知器20としてランプが支持装置18に取り付けられる。報知制御部25は、S106においてランプを点灯させる。
The notification unit 20 notifies that the extension of the step chain 6 is detected by the detection unit 24 (S106). For example, the lamp is attached to the support device 18 as the alarm 20. The notification control unit 25 turns on the lamp in S106.
本実施の形態に示す例では、センサ16は、ステップ1の上方から検出光を放射する。センサ17は、ステップ1の上方から検出光を放射する。そして、検出部24は、センサ16からのオン信号とセンサ17からのオン信号とに基づいて、ステップチェーン6の伸びを検出する。このため、保守員は、検出装置15を例えばスカートガード2に取り付けることによって、ステップチェーン6の伸びを検出できる。検出装置15であれば、既設の乗客コンベアでもステップチェーン6の伸びを容易に検出することができる。
In the example shown in this embodiment, the sensor 16 emits the detection light from above step 1. The sensor 17 emits the detection light from above step 1. Then, the detection unit 24 detects the elongation of the step chain 6 based on the on signal from the sensor 16 and the on signal from the sensor 17. Therefore, the maintenance staff can detect the elongation of the step chain 6 by attaching the detection device 15 to, for example, the skirt guard 2. With the detection device 15, the elongation of the step chain 6 can be easily detected even with the existing passenger conveyor.
なお、制御装置19が有する一部の機能は、保守員が携帯する他の端末に備えられても良い。
Note that some functions of the control device 19 may be provided in other terminals carried by maintenance personnel.
以下に、本乗客コンベアが採用可能な他の例について説明する。以下においては、上述した例と相違する点についてのみ詳しく説明する。図15は、検出装置15の他の例を示す図である。図15は、図3のA-A断面に相当する図である。
Below, other examples that can be adopted by this passenger conveyor will be described. In the following, only the differences from the above-mentioned example will be described in detail. FIG. 15 is a diagram showing another example of the detection device 15. FIG. 15 is a diagram corresponding to the cross section taken along the line AA of FIG.
図15に示す例では、検出装置15は、センサ16、センサ17、支持装置18、制御装置19、及び水平器26を備える。検出装置15は、報知器20を更に備えても良い。
In the example shown in FIG. 15, the detection device 15 includes a sensor 16, a sensor 17, a support device 18, a control device 19, and a level 26. The detection device 15 may further include a notification device 20.
支持装置18は、固定部材27、支持部材28、及び調節機構29を備える。図15に示す例では、固定部材27は、インナーパネル3に着脱可能である。インナーパネル3は、スカートガード2から上方に延びる部材の一例である。固定部材27は、スカートガード2の上方に配置された部材、例えばパネル4に着脱可能でも良い。支持装置18は、他の固定対象に着脱可能でも良い。
The support device 18 includes a fixing member 27, a support member 28, and an adjusting mechanism 29. In the example shown in FIG. 15, the fixing member 27 is removable from the inner panel 3. The inner panel 3 is an example of a member extending upward from the skirt guard 2. The fixing member 27 may be attached to and detached from a member arranged above the skirt guard 2, for example, the panel 4. The support device 18 may be attached to and detached from another fixing target.
センサ16及びセンサ17は、支持部材28に設けられる。固定部材27と支持部材28とは、調節機構29によって連結される。調節機構29は、支持部材28の向きを調節するための機構である。即ち、図15に示す例では、固定部材27がインナーパネル3に固定された状態で、センサ16から放射される検出光の向きとセンサ17から放射される検出光の向きとを調節機構29によって調節することができる。
The sensor 16 and the sensor 17 are provided on the support member 28. The fixing member 27 and the support member 28 are connected by an adjusting mechanism 29. The adjusting mechanism 29 is a mechanism for adjusting the orientation of the support member 28. That is, in the example shown in FIG. 15, with the fixing member 27 fixed to the inner panel 3, the direction of the detection light emitted from the sensor 16 and the direction of the detection light emitted from the sensor 17 are adjusted by the adjusting mechanism 29. Can be adjusted.
水平器26は、センサ16からの検出光に直交する平面が水平に配置されていることを視認するためのものである。なお、本実施の形態に示す例では、センサ16からの検出光とセンサ17からの検出光とは平行である。保守員は、センサ16からの検出光及びセンサ17からの検出光が鉛直下向きに放射されていることを水平器26を見ることによって確認できる。なお、図4に示す例において、検出装置15が水平器26を備えても良い。
The level 26 is for visually recognizing that the plane orthogonal to the detection light from the sensor 16 is horizontally arranged. In the example shown in this embodiment, the detection light from the sensor 16 and the detection light from the sensor 17 are parallel to each other. The maintenance staff can confirm by looking at the level 26 that the detection light from the sensor 16 and the detection light from the sensor 17 are radiated vertically downward. In the example shown in FIG. 4, the detection device 15 may include a level 26.
本実施の形態では、ステップ1が水平に移動するステップ1の上方に検出装置15が配置される例について説明した。検出装置15は、斜め上方或いは斜め下方に移動するステップ1の上方に配置されても良い。かかる場合、正常位置に配置されたステップ1が検出装置15の下方を通過する際にセンサ17から周期的にオン信号が出力されるように、センサ17が調整される。
In the present embodiment, an example in which the detection device 15 is arranged above the step 1 in which the step 1 moves horizontally has been described. The detection device 15 may be arranged above step 1 which moves diagonally upward or diagonally downward. In such a case, the sensor 17 is adjusted so that the on signal is periodically output from the sensor 17 when the step 1 arranged at the normal position passes below the detection device 15.
本実施の形態において、符号21~25に示す各部は、制御装置19が有する機能を示す。図16は、制御装置19のハードウェア資源の例を示す図である。制御装置19は、ハードウェア資源として、例えばプロセッサ31とメモリ32とを含む処理回路30を備える。記憶部21の機能は、メモリ32によって実現される。メモリ32として、半導体メモリ等が採用できる。制御装置19は、メモリ32に記憶されたプログラムをプロセッサ31によって実行することにより、符号22~25に示す各部の機能を実現する。
In the present embodiment, each part indicated by reference numerals 21 to 25 indicates a function of the control device 19. FIG. 16 is a diagram showing an example of hardware resources of the control device 19. The control device 19 includes a processing circuit 30 including, for example, a processor 31 and a memory 32 as hardware resources. The function of the storage unit 21 is realized by the memory 32. As the memory 32, a semiconductor memory or the like can be adopted. The control device 19 realizes the functions of the respective parts shown by the reference numerals 22 to 25 by executing the program stored in the memory 32 by the processor 31.
図17は、制御装置19のハードウェア資源の他の例を示す図である。図17に示す例では、制御装置19は、例えばプロセッサ31、メモリ32、及び専用ハードウェア33を含む処理回路30を備える。図17は、制御装置19が有する機能の一部を専用ハードウェア33によって実現する例を示す。制御装置19が有する機能の全部を専用ハードウェア33によって実現しても良い。専用ハードウェア33として、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGA、又はこれらの組み合わせを採用できる。
FIG. 17 is a diagram showing another example of the hardware resource of the control device 19. In the example shown in FIG. 17, the control device 19 includes, for example, a processing circuit 30 including a processor 31, a memory 32, and dedicated hardware 33. FIG. 17 shows an example in which a part of the functions of the control device 19 is realized by the dedicated hardware 33. All the functions of the control device 19 may be realized by the dedicated hardware 33. As the dedicated hardware 33, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof can be adopted.
本開示に係る検出装置を用いることにより、ステップを連結するチェーンの伸びを容易に検出することができる。
By using the detection device according to the present disclosure, it is possible to easily detect the elongation of the chain connecting the steps.
1 ステップ、 2 スカートガード、 3 インナーパネル、 4 パネル、 5 移動手摺、 6 ステップチェーン、 7 ステップ軸、 8 踏板、 9 支持枠、 10 ローラ、 11 レール、 12 レール、 13 ローラ、 15 検出装置、 16 センサ、 17 センサ、 18 支持装置、 18a 磁石、 19 制御装置、 20 報知器、 21 記憶部、 22 演算部、 23 判定部、 24 検出部、 25 報知制御部、 26 水平器、 27 固定部材、 28 支持部材、 29 調節機構、 30 処理回路、 31 プロセッサ、 32 メモリ、 33 専用ハードウェア
1 step, 2 skirt guard, 3 inner panel, 4 panel, 5 moving handrail, 6 step chain, 7 step axis, 8 tread plate, 9 support frame, 10 roller, 11 rail, 12 rail, 13 roller, 15 detection device, 16 Sensor, 17 sensor, 18 support device, 18a magnet, 19 control device, 20 alarm, 21 storage unit, 22 calculation unit, 23 judgment unit, 24 detection unit, 25 notification control unit, 26 level, 27 fixing member, 28 Support member, 29 adjustment mechanism, 30 processing circuit, 31 processor, 32 memory, 33 dedicated hardware
Claims (10)
- スカートガードと、
前記スカートガードの側方を移動するステップと、
前記ステップに連結されたチェーンと、
を備えた乗客コンベアにおいて、前記チェーンの伸びを検出するための検出装置であって、
第1検出光を放射し、当該第1検出光の反射光に応じて第1信号を出力する第1センサと、
第2検出光を放射し、当該第2検出光の反射光に応じて第2信号を出力する第2センサと、
前記第1センサ及び前記第2センサを支持し、前記乗客コンベアに備えられた特定の固定対象に着脱可能な支持装置と、
前記第1センサからの第1信号及び前記第2センサからの第2信号に基づいて、前記チェーンの伸びを検出する検出手段と、
を備え、
前記第1検出光は、前記支持装置が前記固定対象に固定された状態で、前記スカートガードと正常位置に配置された前記ステップとの間を上方から通過するように前記第1センサから下向きに放射され、
前記第2検出光は、前記支持装置が前記固定対象に固定された状態で、正常位置に配置された前記ステップに上方から当たるように前記第1検出光より前記スカートガードから離れた位置で前記第2センサから下向きに放射される検出装置。 With a skirt guard,
The step to move the side of the skirt guard and
With the chain connected to the step,
A detection device for detecting the elongation of the chain in a passenger conveyor provided with the above.
A first sensor that radiates the first detection light and outputs a first signal according to the reflected light of the first detection light.
A second sensor that radiates the second detection light and outputs a second signal according to the reflected light of the second detection light.
A support device that supports the first sensor and the second sensor and is attached to and detachable from a specific fixing target provided on the passenger conveyor.
A detection means for detecting the elongation of the chain based on the first signal from the first sensor and the second signal from the second sensor.
Equipped with
The first detection light is downward from the first sensor so as to pass between the skirt guard and the step arranged in a normal position from above with the support device fixed to the fixing target. Radiated,
The second detection light is located at a position away from the skirt guard from the first detection light so as to hit the step arranged at a normal position from above with the support device fixed to the fixing target. A detection device that emits downward light from the second sensor. - 前記第2センサから第2信号が出力されなくなってから次の第2信号が出力されるまでの時間を演算する演算手段と、
特定の基準範囲を記憶する記憶手段と、
を更に備え、
前記検出手段は、
前記第1センサから第1信号が出力された場合に前記チェーンの伸びを検出し、
前記演算手段によって演算された時間が前記基準範囲から外れた場合に前記チェーンの伸びを検出する請求項1に記載の検出装置。 An arithmetic means for calculating the time from when the second signal is no longer output from the second sensor until the next second signal is output, and
A storage means for storing a specific reference range,
Further prepare
The detection means
When the first signal is output from the first sensor, the elongation of the chain is detected and the chain is extended.
The detection device according to claim 1, wherein the elongation of the chain is detected when the time calculated by the calculation means deviates from the reference range. - 前記チェーンの伸びが前記検出手段によって検出されたことを報知するための報知器を更に備えた請求項1又は請求項2に記載の検出装置。 The detection device according to claim 1 or 2, further comprising a notification device for notifying that the elongation of the chain has been detected by the detection means.
- 前記支持装置に支持され、前記第1検出光又は前記第2検出光に直交する平面が水平に配置されていることを視認するための水平器を更に備えた請求項1から請求項3の何れか一項に記載の検出装置。 Any of claims 1 to 3 further provided with a level supported by the support device and for visually recognizing that a plane orthogonal to the first detection light or the second detection light is horizontally arranged. The detection device according to one item.
- 前記支持装置は、
前記固定対象に着脱可能な固定部材と、
前記第1センサ及び前記第2センサが設けられた支持部材と、
前記固定部材が前記固定対象に固定された状態で、前記第1検出光が放射される向きと前記第2検出光が放射される向きとを調節可能な調節機構と、
を備えた請求項1から請求項4の何れか一項に記載の検出装置。 The support device is
A fixing member that can be attached to and detached from the fixing target,
The support member provided with the first sensor and the second sensor, and
An adjustment mechanism capable of adjusting the direction in which the first detection light is emitted and the direction in which the second detection light is emitted while the fixing member is fixed to the fixing target.
The detection device according to any one of claims 1 to 4, comprising the above. - 前記固定対象は、前記スカートガード、前記スカートガードから上方に延びる部材、又は前記スカートガードの上方に配置された部材である請求項1から請求項5の何れか一項に記載の検出装置。 The detection device according to any one of claims 1 to 5, wherein the fixing target is the skirt guard, a member extending upward from the skirt guard, or a member arranged above the skirt guard.
- スカートガードと、
前記スカートガードの側方を移動するステップと、
前記ステップに連結されたチェーンと、
前記チェーンの伸びを検出するための検出装置と、
を備え、
前記検出装置は、
第1検出光を放射し、当該第1検出光の反射光に応じて第1信号を出力する第1センサと、
第2検出光を放射し、当該第2検出光の反射光に応じて第2信号を出力する第2センサと、
前記第1センサからの第1信号及び前記第2センサからの第2信号に基づいて、前記チェーンの伸びを検出する検出手段と、
を備え、
前記第1検出光は、前記スカートガードと正常位置に配置された前記ステップとの間を上方から通過するように、前記第1センサから下向きに放射され、
前記第2検出光は、正常位置に配置された前記ステップに上方から当たるように、前記第1検出光より前記スカートガードから離れた位置で前記第2センサから下向きに放射される乗客コンベア。 With a skirt guard,
The step to move the side of the skirt guard and
With the chain connected to the step,
A detection device for detecting the elongation of the chain and
Equipped with
The detection device is
A first sensor that radiates the first detection light and outputs a first signal according to the reflected light of the first detection light.
A second sensor that radiates the second detection light and outputs a second signal according to the reflected light of the second detection light.
A detection means for detecting the elongation of the chain based on the first signal from the first sensor and the second signal from the second sensor.
Equipped with
The first detection light is radiated downward from the first sensor so as to pass between the skirt guard and the step placed in a normal position from above.
The second detection light is a passenger conveyor radiated downward from the second sensor at a position away from the skirt guard from the first detection light so as to hit the step arranged at a normal position from above. - 前記検出装置は、
前記第2センサから前記第2信号が出力されなくなってから次の第2信号が出力されるまでの時間を演算する演算手段と、
特定の基準範囲を記憶する記憶手段と、
を更に備え、
前記検出手段は、
前記第1センサから第1信号が出力された場合に前記チェーンの伸びを検出し、
前記演算手段によって演算された時間が前記基準範囲から外れた場合に前記チェーンの伸びを検出する請求項7に記載の乗客コンベア。 The detection device is
An arithmetic means for calculating the time from when the second signal is no longer output from the second sensor until the next second signal is output, and
A storage means for storing a specific reference range,
Further prepare
The detection means
When the first signal is output from the first sensor, the elongation of the chain is detected and the chain is extended.
The passenger conveyor according to claim 7, wherein the elongation of the chain is detected when the time calculated by the calculation means deviates from the reference range. - 前記チェーンの伸びが前記検出手段によって検出されたことを報知するための報知器を更に備えた請求項7又は請求項8に記載の乗客コンベア。 The passenger conveyor according to claim 7 or 8, further comprising a notification device for notifying that the extension of the chain has been detected by the detection means.
- 前記検出装置は、前記スカートガードに設けられた請求項7から請求項9の何れか一項に記載の乗客コンベア。 The passenger conveyor according to any one of claims 7 to 9, wherein the detection device is provided on the skirt guard.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/024662 WO2021260810A1 (en) | 2020-06-23 | 2020-06-23 | Detection device and passenger conveyor |
| JP2022519615A JP7097534B2 (en) | 2020-06-23 | 2020-06-23 | Detection device and passenger conveyor |
| CN202080102147.5A CN115916684B (en) | 2020-06-23 | 2020-06-23 | Detection device and passenger conveyor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/024662 WO2021260810A1 (en) | 2020-06-23 | 2020-06-23 | Detection device and passenger conveyor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021260810A1 true WO2021260810A1 (en) | 2021-12-30 |
Family
ID=79282297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/024662 WO2021260810A1 (en) | 2020-06-23 | 2020-06-23 | Detection device and passenger conveyor |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7097534B2 (en) |
| CN (1) | CN115916684B (en) |
| WO (1) | WO2021260810A1 (en) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62113122U (en) * | 1986-12-19 | 1987-07-18 | ||
| JP2016016926A (en) * | 2014-07-08 | 2016-02-01 | 東芝エレベータ株式会社 | Gap abnormality determination device for passenger conveyor |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6058755B1 (en) * | 2015-07-09 | 2017-01-11 | 東芝エレベータ株式会社 | Chain extension detecting device for passenger conveyor and passenger conveyor |
| JP6655488B2 (en) * | 2016-07-06 | 2020-02-26 | 株式会社日立製作所 | Anomaly detection device for passenger conveyor or passenger conveyor steps |
| JP6493626B1 (en) * | 2017-06-14 | 2019-04-03 | 三菱電機株式会社 | Passage chain monitoring system for passenger conveyors |
| CN110891891B (en) * | 2017-07-19 | 2021-01-05 | 三菱电机株式会社 | Abnormality detection device for passenger conveyor |
-
2020
- 2020-06-23 JP JP2022519615A patent/JP7097534B2/en active Active
- 2020-06-23 WO PCT/JP2020/024662 patent/WO2021260810A1/en active Application Filing
- 2020-06-23 CN CN202080102147.5A patent/CN115916684B/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62113122U (en) * | 1986-12-19 | 1987-07-18 | ||
| JP2016016926A (en) * | 2014-07-08 | 2016-02-01 | 東芝エレベータ株式会社 | Gap abnormality determination device for passenger conveyor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7097534B2 (en) | 2022-07-08 |
| CN115916684B (en) | 2023-07-28 |
| JPWO2021260810A1 (en) | 2021-12-30 |
| CN115916684A (en) | 2023-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6170220B1 (en) | Diagnostic equipment | |
| KR102435681B1 (en) | Abrasion inspection device for conveyor belt, fire predicting system for conveyor belt, detecting system for approach of operator, surface detecting device with auto calibration, and integrated management system using thereof | |
| JP2012006721A (en) | Safety device of passenger conveyor | |
| JP6816923B1 (en) | Anomaly detection device | |
| JP6479941B1 (en) | Anomaly detection system for passenger conveyors | |
| KR102435683B1 (en) | Abrasion inspection device for conveyor belt, fire predicting system for conveyor belt, detecting system for approach of operator, surface detecting device with auto calibration, and integrated management system using thereof | |
| TWI827757B (en) | Passenger transport system with a device for registering users and method for registering user of such a passenger transport system | |
| US10766747B2 (en) | Abnormality detection apparatus for passenger conveyor | |
| WO2021260810A1 (en) | Detection device and passenger conveyor | |
| JP6188896B1 (en) | Passenger conveyor | |
| US10954104B2 (en) | Chain defect monitoring in a people conveyor | |
| JP2015051836A (en) | Passenger conveyor | |
| JP5660624B2 (en) | Abnormality detection device for passenger conveyor | |
| CN109476464A (en) | The operation exception detection device of passenger conveyors and the operation exception detection method of passenger conveyors | |
| JP2015174715A (en) | human detection device of passenger conveyor | |
| JP6825072B1 (en) | Passenger conveyor anomaly detection system | |
| JP2013056735A (en) | Device and method of measuring number persons using passenger conveyor and method of operating the passenger conveyor | |
| EP3473577A1 (en) | People conveyor and method of determining power for driving a handrail element of a people conveyor | |
| CN210794558U (en) | On-line detection conveying device and conveying system | |
| WO2016027342A1 (en) | Handrail abnormality detection system for passenger conveyor | |
| JP7114658B2 (en) | Installation method of chain elongation detector and reflective optical sensor for passenger conveyor | |
| JP7134155B2 (en) | Step tread lift detection device and step tread lift detection system | |
| JP7276993B2 (en) | Passenger conveyor and anomaly detection method | |
| KR20160079446A (en) | Escalator safety apparatus and controlling method thereof | |
| JP6878630B1 (en) | Diagnostic system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20941797 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022519615 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20941797 Country of ref document: EP Kind code of ref document: A1 |