WO2021250946A1 - 多主体連携計画システムおよび多主体連携計画方法 - Google Patents
多主体連携計画システムおよび多主体連携計画方法 Download PDFInfo
- Publication number
- WO2021250946A1 WO2021250946A1 PCT/JP2021/005997 JP2021005997W WO2021250946A1 WO 2021250946 A1 WO2021250946 A1 WO 2021250946A1 JP 2021005997 W JP2021005997 W JP 2021005997W WO 2021250946 A1 WO2021250946 A1 WO 2021250946A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- plan
- time
- cooperation
- adjustment
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06313—Resource planning in a project environment
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Definitions
- the present invention relates to a technique for facilitating the creation of a consistent plan among a plurality of organizations.
- service provision is realized as planned by creating an operation plan for each resource.
- the operation plan of each resource is created by each management organization, and if any inconsistency occurs between each plan, adjustment work is required. In particular, if a sudden event makes it impossible to execute a previously agreed plan, it is necessary to agree on an alternative plan that is consistent between organizations and put it into practice within a short period of time.
- supply chain scheduling including allocation of supply sources such as parts, production schedules of multiple factories, and allocation of delivery resources can be done from the allocation of supply sources by sharing the information required for scheduling and the results of each scheduling.
- Techniques for sequentially creating see Patent Document 1 and the like have been proposed.
- Patent Document 2 "a technique that enables efficient and quick execution of matching processing between plans while appropriately maintaining the confidentiality of information related to the plans among the organizations that manage the plans that cooperate with each other"
- Patent Document 1 it is assumed that a plurality of factories accept a plan assigned to each and produce according to the plan.
- the entity that manages and plans the resources required to provide services may span multiple companies or multiple departments of the same company, and as a result, for each planning entity.
- the preferred plan may vary from planner to planner. In such cases, no method is given to coordinate between the plans and formulate a feasible plan as a whole.
- Patent Document 2 discloses a method for promptly performing matching processing between plans, but a method for adjusting the inconsistency and formulating a feasible plan as a whole is given. Not.
- an organization that manages one of the resource groups presents multiple plan proposals for the resource group managed by its own organization to the management organization of other related resource groups, and whether or not the plan proposal from each organization can be accepted. By receiving the response from, it is possible to formulate a plan that can be agreed upon by all organizations.
- a preferred aspect of the present invention is a plan generation device that generates a plurality of plan plans, an evaluation device that calculates a time-dependent evaluation value for the plan plan, and a time-dependent adjustment success probability for the plan plan. It is a multi-subject cooperation planning system including a recommendation degree calculation device that calculates a recommendation degree which is a value depending on time from the evaluation value and the adjustment success probability.
- Another preferred aspect of the present invention is a multi-subject cooperation planning method executed by an information processing device including a CPU and a storage device, wherein the CPU generates a plurality of plan plans and stores them in the storage device.
- First step the CPU evaluates a plurality of the plans to generate a self-evaluation value, and the second step of storing in the storage device, the CPU estimates the adjustment time of the plurality of plans.
- the CPU calculates the recommended value of the plan based on the self-evaluation value and the adjustment time estimated value, and stores the storage.
- a multi-tasking cooperation plan in which the CPU selects at least one from a plurality of the above-mentioned plans based on the recommended value and executes the fourth step of storing in the apparatus and the fifth step of proposing to the cooperation destination. The method.
- Notations such as “first”, “second”, and “third” in the present specification and the like are attached to identify components, and do not necessarily limit the number, order, or contents thereof. is not it. Further, the numbers for identifying the components are used for each context, and the numbers used in one context do not always indicate the same composition in the other contexts. Further, it does not prevent the component identified by a certain number from having the function of the component identified by another number.
- a multi-tasking cooperation planning system in which a means for calculating a time-dependent evaluation value for an alternative plan and an estimation of the time required for inter-organizational adjustment of the alternative plan are estimated. It includes means for calculating the time-dependent recommendation level from the evaluation value and estimated adjustment time of the alternative plan.
- This system is a multi-tasking cooperation planning system that proposes the plan with the highest recommendation level at the current time to the cooperation partner, and the acceptance response is obtained from all the cooperation partners by the time when the recommendation level of the proposed plan is the highest. If not, the recommendation level from the relevant time is recalculated, and the plan with the highest recommendation level at the relevant time is proposed to the collaborator.
- FIG. 1 is a system configuration diagram showing the system configuration in the embodiment.
- reference numeral 100 is a multi-subject cooperation planning system
- reference numeral 101 is a planning cooperation destination response providing device
- reference numeral 102 is a network
- reference numeral 103 is a self-evaluation device for planning
- reference numeral 104 is a data reading device
- reference numeral 105 is a control device.
- Code 106 is an alternative plan generator
- code 107 is a plan adjustment time estimation device
- code 108 is a plan recommendation degree calculation device
- code 109 is a DB device
- code 110 is a terminal device
- code 111 is past response information
- code 113 is alternative plan proposal information
- code 114 is the self-evaluation information of the plan
- code 115 is the estimated adjustment time information of the plan
- code 116 is the recommendation level information of the plan
- code 117 is the plan cooperation destination system. be.
- the multi-tasking cooperation planning system 100, the planning cooperation destination system 117, and the planning cooperation destination response providing device 101 can communicate with each other via the network 102.
- two networks 102 are connected via a plan cooperation destination response providing device 101, but this is an example, and there are no restrictions on the network configuration.
- the plan cooperation destination response providing device 101 relays the communication between the plan cooperation destination response providing device 101 and the planning cooperation destination system 117, but the planning cooperation destination response providing device 101 is omitted and the multiple main elements are omitted.
- the cooperation plan system 100 and the plan cooperation destination system 117 may be configured to communicate directly with each other.
- the multi-tasking cooperation planning system 100 and the planning cooperation destination systems 117-1,117-2 are systems for managing the resources provided for each business or service. Now, as an example, it is assumed that the multi-center cooperation planning system 100 manages the resource group A, the planning cooperation destination system 117-1 manages the resource group B, and the planning cooperation destination system 117-2 manages the resource group C. .. These multi-subject cooperation planning system 100 and the planning cooperation destination systems 117-1,117-2 may be operated by different business entities (for example, corporations), or may be operated by different departments of one business entity. ..
- the multi-tasking cooperation planning system 100 shall plan the service using the resource group A.
- the number of subjects is three, A to C, but of course, the present embodiment can be applied even if the number of subjects is four or more.
- the plan cooperation destination response providing device 101 is one or more types of other resource groups (resource group B) necessary for providing services in cooperation with the resource group A that creates an operation plan using the multi-center cooperation planning system 100. , Resource group C, etc.) Provides planning information for the management organization. These plan information shall be transmitted from the plan cooperation destination system 117-1,117-2 to the plan cooperation destination response providing device 101. Further, the plan cooperation destination response providing device 101 receives the plan information of the resource group A, and receives a response such as an approval or correction request from another resource group management organization to the provided resource group A. Received from 1,117-2 and provided to the multi-tasking cooperation planning system 100.
- the plan cooperation destination system 117-1,117-2 may have the same configuration as the multi-element cooperation planning system 100, but in this embodiment, the above plan information and the input of the response such as the approval or correction request are accepted and the plan is made. It suffices to have at least a function of transmitting to the cooperation destination response providing device 101 and a function of receiving transmission from the planning cooperation destination response providing device 101. It is assumed that the person in charge of each resource group management organization inputs the plan information and the approval or correction request.
- resource group A is resources related to vehicle operation
- resource group B is human resources related to operations such as drivers
- resource group C is resources required for maintenance (equipment / equipment and maintenance). It is assumed that it is a human resource such as a member).
- the plan cooperation destination response providing device 101 makes an approval response or revision request of the operator personnel management department and the maintenance department to the plan related to the resource A group formulated by the vehicle operation plan management department. Transmit to 100.
- the operator personnel plan and the maintenance planning method created by each department are provided to the multi-center cooperation planning system 100.
- it is provided via the Internet by HTTP (HyperText Transfer Protocol).
- the network 102 is a medium for connecting the plan cooperation destination response providing device 101 and the multi-subject cooperation planning system 100, such as the Internet or a dedicated network.
- the network 102 may be in the form of wired or wireless, and may consist of a plurality of networks.
- the multi-organization cooperation planning system 100 is a resource group under its own organization management (this example) in order to provide services in cooperation with one or more resource groups under the control of another organization (resource groups B and C in this example). Then, the allocation plan of the resource group A) is created.
- the multi-tasking cooperation planning system 100 includes a plan self-evaluation device 103, a data reading device 104, a control device 105, an alternative plan generation device 106, a plan adjustment time estimation device 107, a plan recommendation degree calculation device 108, and a DB device 109.
- the terminal device 110 is included.
- the self-evaluation device 103 of the plan calculates the evaluation value seen from its own department (in this example, the vehicle operation plan management department) with respect to the plan generated by the alternative plan generation device 106, and self-evaluates the result of the plan. It is a device that stores information 114.
- the definition of the evaluation value is arbitrary. For example, in the evaluation of the operation plan of the resource related to the vehicle operation, the total delay time from the original plan and the fluctuation of the transportation amount by the vehicle are used as the evaluation criteria.
- the algorithm and evaluation function for evaluation shall be defined in advance and stored in the self-evaluation device 103. In this embodiment, the purpose is to agree on and implement a consistent alternative plan among the organizations in a short period of time, but even if it is applied to a general plan that is not an alternative plan. Needless to say, it's good.
- the data reading device 104 is a device that receives the data provided by the planning cooperation destination response providing device 101 as an input and saves it as the past response information 111 on the DB device 109.
- the control device 105 is a device that controls each device constituting the multi-subject cooperation planning system 100 so as to formulate a multi-main cooperation plan as a system.
- the control device 105 shall also control known processing performed by a general PC, such as transmission / reception of data via the network 102.
- the alternative plan generation device 106 is a device that generates one or more operation plan alternatives of the resource group A and saves the result as the alternative plan information 113.
- the plan adjustment time estimation device 107 is a management organization such as a management organization (resource group B, resource group C, etc.) for the alternative plan plan generated by the alternative plan plan generation device 106.
- a management organization resource group B, resource group C, etc.
- the operator personnel management department and the maintenance department Estimates the time it takes to respond to an acceptance / rejection response (referred to as an estimated adjustment time), and saves the result as the estimated adjustment time information 115 of the plan.
- the plan recommendation level arithmetic unit 108 should be selected for coordination with the partner from the plan self-evaluation information 114 and the plan estimated adjustment time information 115 for the alternative plan generated by the alternative plan generator 106. It is a device that calculates the recommendation degree indicating the degree and saves the result in the recommendation degree information 116.
- the DB device 109 is a database (DB) that holds the data created by each device, and includes past response information 111, linked business information 112, alternative plan proposal information 113, plan self-evaluation information 114, and plan estimation adjustment time. It is composed of data such as information 115 and plan recommendation level information 116.
- the DB has functions for registering data, searching for data, extracting related data, and deleting data.
- the DB device 109 is realized by a general PC, and in that case, the DB device can be realized by using a general PC and general DB software running on the general PC.
- the terminal device 110 is a terminal operated by the operator of the multi-subject cooperation planning system 100.
- the terminal device 110 is a device that displays the operation plan of the drafted resource group A and advances the processing flow by receiving the approval of the operator.
- the data used includes the data described below.
- the past response information 111 is used to determine the acceptance / rejection of the operation alternative plan of the resource group A proposed by the multi-center cooperation planning system 100 from the management organizations such as the resource group B and the resource group C, and these decisions.
- Response information such as time.
- the management organization such as resource group B and resource group C, which are the planning cooperation destinations, decides to accept or reject the alternative of the operation plan of the resource group A, and provides the decision to the planning cooperation destination response.
- This is information about the work up to transmission to the device 101. For example, if it is stipulated that if an alternative is contacted under certain conditions, it will be replied within a fixed time, the information in such a business manual is included.
- Alternative plan information 113 is information on the operation plan alternative of the resource group A generated by the alternative plan generation device 106. This may be in a format in which the operation plan is uniquely understood, for example, in the case of vehicle operation, it is a combination of the values and the decision variables such as the flight number and time to which the vehicle is assigned.
- the plan self-evaluation information 114 is value information evaluated by the plan self-evaluation device 103 with respect to the alternative operation plan of the resource group A generated by the alternative plan generation device 106. This evaluation calculates the value seen by the department when the alternative plan is accepted and executed by other related organizations. For example, in the evaluation of the operation plan of resources related to vehicle operation, the total delay time from the original plan and the fluctuation of the transportation amount by the vehicle are used as evaluation criteria.
- the algorithm for evaluation shall be defined in advance by the user and stored in the self-evaluation information 114.
- This evaluation value depends on the time when the alternative is put into practice. For example, if the time when the agreements between the organizations are agreed and put into practice forces the plan to be pushed back as a whole, the total delay time will increase, and the agreement between the organizations and the plan execution time will be delayed. The evaluation of the plan goes down. In addition, in the case of a plan that cannot be executed after a specific time, the evaluation value may become zero when the inter-organizational agreement and the plan execution time exceed a certain threshold value.
- the estimated adjustment time information 115 of the plan is received from the management organizations such as resource group B and resource group C for acceptance / rejection of the alternative operation plan of resource group A generated by the alternative plan generation device 106. This is information as a result of calculating the estimated value of the time required for the plan by the adjustment time estimation device 107 of the plan.
- the plan recommendation level information 116 is for an alternative operation plan of one or more resource groups A calculated by the plan recommendation level arithmetic unit 108 from the information including the plan self-evaluation information 114 and the plan estimation adjustment time information 115. Information on the degree of recommendation. This highly recommended alternative plan is coordinated with management organizations such as resource group B and resource group C. The details of these data will be described later.
- the devices and systems 101, 103 to 110, and 117 in FIG. 1 use a general PC in this embodiment, and the central processing unit of the PC executes the program stored in the storage device to perform the functions of the devices.
- the central processing unit of the PC executes the program stored in the storage device to perform the functions of the devices.
- it is realized. However, it can also be realized by using a dedicated machine instead of a general PC.
- the devices of FIG. 1 are connected to each other by a network.
- each device or system of FIG. 1 may be configured by using a single PC, or may share functions by any plurality of PCs.
- the multi-tasking cooperation planning system 100 is described as having the function of the management system that manages the resource group A. That is, the multi-tasking cooperation planning system 100 includes the function of the planning cooperation destination system 117 that manages the resource group A. However, it is also possible to omit the function of the planned cooperation destination system 117 from the multi-center cooperation planning system 100 and share it with a plurality of planning cooperation destination systems 117. In this case, the multi-center cooperation planning system 100 uses, for example, an instruction from the planning cooperation destination system 117-1 as a trigger to propose a plan to be proposed to another planning cooperation destination system such as the planning cooperation destination system 117-2. select.
- the planning cooperation destination systems 117-1 and 117-2 may each have the configuration of the multi-subject cooperation planning system 100.
- reference numeral 201 is a CPU
- reference numeral 202 is a memory
- reference numeral 203 is an interface
- reference numeral 204 is a network interface
- reference numeral 205 is a keyboard
- reference numeral 206 is a screen
- reference numeral 207 is a mouse
- reference numeral 208 is a hard disk.
- the CPU 201 is a central processing unit, and is a device that can execute a program recorded in the memory 202 or transferred in advance from the hard disk 208 to the memory 202.
- the program can be used by a PC and may be introduced by a removable storage medium.
- a device for reading the storage medium is connected to the interface 203.
- the program may be introduced into the PC by the network interface 204 via the communication medium (communication line or carrier wave on the communication line), if necessary.
- Memory 202 temporarily records programs and data.
- Interface 203 is for connecting devices in the PC system.
- the network interface 204 is a device for communicating with a PC or the like outside the PC system.
- the keyboard 205 is a device operated by the operator of the PC system in order to input commands and data to the PC system.
- the screen 206 is a device for displaying processing results and the like.
- the mouse 207 is a device that specifies a position on the screen by moving a pointer displayed on the screen and causing an operator to press a button at an arbitrary place, and conveys some action to the CPU 201.
- the mouse 207 can be replaced by another pointing device such as a touch panel. When replacing the mouse 207 with a touch panel, the pointer is usually unnecessary.
- the hard disk 208 is a device for storing programs and data, and can be configured by, for example, a magnetic disk, a non-volatile memory, or the like.
- the programs and data stored in the hard disk 208 are normally retained even when the power of the hard disk 208 is turned on after the power is turned off.
- An operating system (OS) may be installed in the hard disk 208 in advance. By doing so, it becomes possible to specify a program using a file name.
- the OS is the basic software of a computer, and a generally well-known OS can be used.
- each device may be configured with one PC, or all devices may be configured with one PC. Alternatively, one device may be configured by a plurality of PCs connected by a network.
- the same functions as those realized by the program can be realized by hardware such as FPGA (Field Programmable Gate Array) and ASIC (Application Specific Integrated Circuit).
- FIG. 3 is a diagram showing the data structure of the past response information 111 in the embodiment.
- Proposal ID 301 is a number that uniquely identifies the alternative plan proposal processing to other organizations.
- the proposal ID is generated when the operation plan generated by the alternative plan generation device 106 is transmitted to the specific plan cooperation destination system 117.
- the plan ID 302 is a number that uniquely identifies the proposed operation plan of the resource group A.
- the plan ID is generated when the operation plan is generated by the alternative plan generation device 106. For example, if the same proposal is proposed to a plurality of different organizations, it is recorded using the same plan ID and different proposal IDs.
- the proposal destination 303 the name of the proposal destination organization in the proposal process is described.
- the proposal date and time 304 and the response date and time 305 are the dates and times when the management organization of the resource group A sends the plan proposal to the proposal destination, and the response from the proposal destination organization to the proposal destination.
- the date and time received from 101 is described.
- the required time 306 is the difference between the response date and time 305 and the proposal date and time 304, and is the time required from the proposal destination receiving the proposal of the alternative plan to sending the decision of acceptance / rejection to the plan cooperation destination response providing device 101.
- Response 307 is the response of the proposal destination to the proposal.
- FIG. 4 is a diagram showing the data structure of the alternative plan proposal information 113 in the embodiment.
- the alternative plan information 113 is generated by the alternative plan generation device 106.
- the plan ID 401 is a number that uniquely identifies the operation plan plan of the resource group A.
- the variable name 402 is a decision variable to be determined in the plan, and the value 403 describes the value of the decision variable in the plan.
- a draft plan with a particular plan ID is explained by being given the values of all the decision variables. That is, all plans with a "plan ID" of "1” have a value of "X (1,1)" of "5", a value of "X (1,2)” of "3", and so on. It is expressed by being given the value of the decision variable of.
- FIG. 5A is a diagram showing the self-evaluation information 114 of the plan in the embodiment.
- the self-assessment information for each plan is expressed as a time-dependent function. That is, the self-evaluation information 114 is data showing the relationship between the time t and the evaluation value E.
- the evaluation function E (t) for calculating the evaluation value E can be defined by the user. For example, when the delay time of the plan is evaluated and the evaluation function that the evaluation value decreases linearly with respect to the delay time is used, for example, the evaluation value 501 for the plan ID 1 is constant from the current time to 7 minutes later. Yes, if it exceeds 7 minutes, it will be necessary to revise the plan backwards and execute it, so the evaluation value will drop. The same applies to the evaluation value 502 for the plan ID 2. Further, the evaluation value 503 for the plan ID 3 is constant from the current time to +15 minutes, but becomes infeasible after 15 minutes, so the evaluation value becomes zero.
- FIG. 5B is also an example of self-evaluation information 114 for evaluating the amount of transportation by the vehicle. If the vehicle cannot be operated for transportation after a certain period of time, the evaluation function takes two values. For example, the evaluation value 601 for plan ID 1 is constant because it can be operated from the current time until 7 minutes later and the transportation volume does not change, but after 7 minutes it cannot be operated and the transportation volume becomes zero, and the evaluation value. Becomes zero. The same applies to the evaluation value 602 for the plan ID 2 and the evaluation value 603 for the plan ID 3.
- the evaluation value is changed linearly or binary by the evaluation function E (t), but it may be changed non-linearly.
- any other evaluation function with time as one of the variables may be used.
- it may be in the form of a correspondence table between the time t and the evaluation value E instead of the evaluation function E (t). That is, the setting of the evaluation function E (t) can be arbitrarily set by the user.
- the evaluation function E (t) is often a monotonically decreasing function.
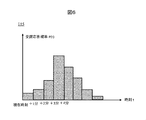
- FIG. 6 is a diagram showing the data structure of the estimated adjustment time information 115 of the plan in the embodiment.
- the estimated adjustment time information of the plan is expressed as the probability that an acceptance response will come from each proposal destination to each alternative plan and plan proposal destination at the time t, for example, with the acceptance response probability P (t) which is a time-dependent function. Be expressed.
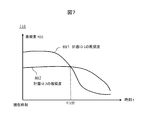
- FIG. 7 is a diagram showing the data structure of the recommendation level information 116 of the plan in the embodiment.
- the recommendation level information of the plan is expressed by the time-dependent function R (t) as the recommendation level R that the plan should be subjected to inter-organizational coordination for each alternative plan.
- the data structure has been described above.
- FIG. 8 is a schematic diagram of the processing flow of the multi-tasking cooperation planning system 100 in the embodiment.
- Step S801 is a process in which the control device 105 instructs the terminal device 110 to wait for an operator command.
- Step S802 is a process in which the terminal device 110 displays a command waiting screen on the screen 206 of the terminal device 110.
- Step S803 is a process in which the operator of the multi-center cooperation planning system 100 instructs the terminal device 110 to formulate an alternative operation plan for the resource group A.
- Step S804 is a process in which the terminal device 110 reports the operator command reception to the control device 105.
- Step S805 is a process in which the control device 105 instructs the alternative plan generation device 106 of the operation plan plan of the resource group A.
- step S805 or lower may be started with the trigger of receiving the alternative operation plan planning creation request from each plan cooperation destination system 117 via the terminal device 110.
- Step S806 is a process in which the alternative plan generation device 106 creates a plurality of types of operation plans for the resource group A and saves them in the DB as alternative plan information 113.
- the operation plan can be created using a general-purpose mathematical optimization tool such as a CP solver or a MIP solver.
- Step S807 is a process in which the control device 105 instructs the self-evaluation device 103 of the plan to calculate the self-evaluation value.
- step S808 the plan self-evaluation device 103 instructs the data reading device 104 to read the alternative plan proposal information 113 from the DB, calculates the self-evaluation value E, and saves it in the DB as the plan self-evaluation information 114. Is. Since there are multiple types of operation plans, the self-evaluation value E is saved for each.
- Step S809 is a process in which the control device 105 instructs the adjustment time estimation device 107 of the plan to calculate the adjustment time estimation value.
- Step S810 is a process in which the adjustment time estimation device 107 of the plan estimates the adjustment time of each cooperation destination and saves it in the DB as the estimated adjustment time information 115.
- the adjustment time estimation device 107 of the plan estimates the adjustment time of each cooperation destination and saves it in the DB as the estimated adjustment time information 115.
- the user empirically predicts the estimated time for obtaining an acceptance response from each collaborator and stores it as estimated adjustment time data as shown in FIG. 6, and the adjustment time estimation device 107 of the plan is used. , Estimate the adjustment time by referring to the estimated adjustment time data of the proposal destination.
- machine learning technology may be applied.
- the past response information 111 is read from the DB
- the proposal destination 303 is the problem
- the function approximation device such as DNN (Deep Neural Network) is learned from the teacher data with the required time 306 as the correct answer
- the plan adjustment time estimation device 107 is learned from the teacher data with the required time 306 as the correct answer.
- the influence of the characteristics of the proposal destination can be considered and the estimation accuracy can be improved.
- the linked business information 112 contains the information of the business manual that stipulates that the response should be made within the specified time when the alternative is contacted, the adjustment is made within the specified time. Expected value for time is expected to increase.
- step S810 reads the past response information 111 and the cooperation destination business information 112 from the DB, estimates the adjustment time for which the acceptance response is obtained from each cooperation destination, and saves it in the DB as the estimated adjustment time information 115.
- the adjustment time is estimated by using a known technique such as machine learning from the past response information 111 and the collaborator business information 112.
- Estimated adjustment time information 115 is acquired for all partners who propose alternative plans. In machine learning, when the plan content is also included in the teacher data and the response time depends on the plan content, since there are multiple types of operation plan proposals, the estimated adjustment time information 115 is saved for each operation plan proposal. .. If the response time does not depend on the plan content but only on the proposal destination, one estimated adjustment time information 115 is obtained for each proposal destination. If it is known that the response time does not depend on the plan contents, it is possible to omit the plan contents from the input and have a simplified structure.
- Step S811 is a process in which the control device 105 instructs the plan recommendation level calculation device 108 to calculate the plan recommendation level.
- step S812 the plan recommendation level calculation device 108 instructs the data reading device 104 to read the plan self-evaluation information 114 and the estimated adjustment time information 115 from the DB, calculates the recommendation level, and calculates the plan recommendation level information. It is a process to save in DB as 116.
- FIG. 9 is a flow chart showing the details of step S812 performed by the recommendation degree arithmetic unit 108.
- step S8121 the self-evaluation information 114 (FIG. 5A, FIG. 5B) and the estimated adjustment time information 115 (FIG. 6) of the plan are read.
- the acceptance response probability P (t) of the estimated adjustment time information 115 is the data for each cooperation destination
- the recommendation degree calculation device 108 performs the calculation of the recommendation degree
- the integrated acceptance is integrated from the acceptance response probability P (t).
- the response probability IP (t) is the probability that acceptance responses can be obtained from all proposal destinations during the relevant time period.
- step S8122 from the acceptance response probability P (t) of each cooperation destination, the integrated acceptance response probability IP (t) for which the acceptance response has been received from all the cooperation destinations in each time zone is calculated.
- the adjustment success probability S (t) is calculated from the integrated acceptance response probability IP (t).
- the adjustment success probability S (t) is an integral value of the integrated acceptance response probability IP (t), and is treated as constant within a unit time. For example, in the above example, it is constant at 2% for 0-1 hours. If you try to handle the probability for each moment, the probability will be 0, so it is necessary to express it for each unit time with a range.
- the particle size of the unit time is arbitrary.
- the adjustment success probability S (t) can be obtained by the product-sum operation of the acceptance response probability P (t) of a plurality of cooperation destinations. Since the adjustment success probability S (t) is an integral value of the integrated acceptance response probability IP (t), it is generally a monotonically increasing function.
- step S8124 the recommendation level R (t) is calculated from the adjustment success probability S (t) and the evaluation value E (t).
- the recommendation level R (t) of the plan ID 1 that depends on the time is, for example, for each time.
- the alternative plan when the adjustment of the plan ID1 fails is that the self-evaluation value at that time is the second highest after the plan ID1.
- the above calculation is an example, and as long as the adjustment success probability and self-evaluation value, which are time functions (or time-dependent values), are used, the self-evaluation value, adjustment success probability, and adjustment failure probability are appropriately weighted. Alternatively, other functions may be used.
- step S813 the control device 105 instructs the data reading device 104 to read the plan recommendation level information 116 from the DB, and proposes the plan with the highest recommendation level R (t) at the current time to the collaborator.
- This is a process of transmitting to the plan cooperation destination response providing device 101.
- the plan with the highest recommendation level at the current time is the plan of plan ID 1
- the time when the recommendation level of plan ID 1 is not the highest is set as the "recommended deadline" and transmitted to the plan cooperation destination response providing device 101.
- Step S814 is a process in which the control device 105 reads the past response information 111 and determines whether or not all the cooperation destinations have accepted the proposal plan by the recommended deadline. If all the partners accept it, proceed to step S815. If not, proceed to step S816.
- Step S815 is a process in which the CPU 201 of the terminal device 110 displays the plan and the self-evaluation information of the plan on the screen of the terminal device 110.
- Step S816 is a process to reset the current time. After completing step S816, the process returns to step S807.
- the individual response probabilities of the cooperation destinations are estimated, and the joint distribution is derived assuming simultaneous independence.
- the adjustment success probability S (t) is estimated by directly modeling the time when the acceptance response is obtained from all the cooperation destinations as a result without assuming the individual response probability of the cooperation destination. May be good.
- the total acceptance response probability may not always be 100%. For example, a suggestion that the acceptance response probability is only 60% even if all the time is integrated indicates that the rejection response is returned with a 40% probability as a whole. When learning from the history, it is possible to learn not only the time distribution but also this response probability integral value at the same time.
- FIG. 10 is a diagram showing an outline of the result display screen in the embodiment.
- reference numeral 901 is a result display screen
- reference numeral 902 is a recommended plan display section
- reference numeral 903 is a self-evaluation value display section
- reference numeral 904 is an estimated adjustment time display section
- reference numeral 905 is a recommendation degree display section
- reference numeral 906 is a scroll bar. Is.
- the recommendation plan display unit 902 graphs the degree of recommendation that changes over time, and displays the recommendation plan that should be proposed to the partner. For example, in this embodiment, the plan ID 1 is proposed to the collaborator from the current time to 5 minutes later. If all the partners do not accept the plan ID1 by 5 minutes, the plan ID1 is withdrawn and the plan ID2 is proposed from 5 minutes to 9 minutes.
- the self-evaluation value, estimated adjustment time, and recommendation level of each plan at the time represented by the scroll bar are self-evaluation value display unit 903, vacant adjustment time display unit 904, and recommendation level display unit 905, respectively. It is displayed in.
- the provision of transportation services by railroad was described as an example, but it can be similarly applied to the fields of aviation, ships and other passengers and transportation.
- this embodiment can also be applied to the case of adjusting the operation plans of a plurality of resources in the fields of manufacturing and distribution.
- the resources are A, B, and C for the sake of explanation, but it goes without saying that the same can be applied to resources of 2 or 4 or more.
- FIG. 11 is a flow chart illustrating the flow up to the creation of the overall plan in the embodiment. In the following flow, it is assumed that the system of FIG. 1 is used. In this case, as described above, in order to provide the service in cooperation with one or more resource groups under the control of other organizations (resource groups B and C in this example), the multi-center cooperation planning system 100 Create an operation plan for resource group A under the control of your own organization.
- the multi-tasking cooperation planning system 100 creates an operation plan for resource A. This process is the process described with reference to FIG. As a result of processing S1000, one or more plans have been created that are accepted by all the partners. This result is displayed to the operator of the multi-tasking cooperation planning system 100 as shown in step S815 of FIG.
- control device 105 of the multi-center cooperation planning system 100 has been agreed with the planning cooperation destination systems 117-1,117-2 via the network 102-1, the planning cooperation destination response providing device 101, and the network 102-2. Notify the contents of the operation plan of resource A of.
- the cooperation destination creates an operation plan for own resources B and C so as to match the operation plan for resource A received by the plan cooperation destination systems 117-1,117-2.
- This process may be manually created at the cooperation destination.
- the plan cooperation destination system 117-1,117-2 may be automatically created by providing a configuration equivalent to the alternative plan generation device 106.
- the cooperation destination sends the operation plans B and C of its own resources to the plan cooperation destination response providing device 101 in the plan cooperation destination systems 117-1,117-2.
- the plan cooperation destination response providing device 101 integrates the operation plans of resources A, B, and C to generate an overall plan. Since the contents of the operation plan of each resource and their integration are well known, details are omitted.
- the plan cooperation destination response providing device 101 transmits the overall plan to the multi-center cooperation planning system 100 and the planning cooperation destination systems 117-1,117-2.
- the overall plan generation process S5000 and the notification process S6000 are performed by the plan cooperation destination response providing device 101, but the plan cooperation destination response providing device 101 is omitted, and the multi-center cooperation planning system 100 processes S5000. It can also be configured to perform processing S6000.
- the multi-tasking cooperation planning system 100 creates the operation plan of resource A for which the approval of the cooperation destination has been obtained. This plan is sent to the collaborator, and the collaborator creates an operation plan for resources B and C according to this plan. By integrating the operation plans of each resource, the overall plan is completed. In this embodiment, the overall plan can be created more efficiently than the conventional method of creating the overall plan by performing the coordination work between the plans after formulating the operation plan of each resource.
- the present invention is not limited to the above-mentioned embodiment and includes various modifications.
- the above-described embodiment has been described in detail in order to explain the present invention in an easy-to-understand manner, and is not necessarily limited to the one including all the described configurations.
- it is possible to replace a part of the configuration of one embodiment with the configuration of another embodiment and it is also possible to add the configuration of another embodiment to the configuration of one embodiment.
- each of the above configurations, functions, processing units, processing means, etc. may be realized by hardware by designing a part or all of them by, for example, an integrated circuit. Further, each of the above configurations, functions, and the like may be realized by software by the processor interpreting and executing a program that realizes each function. Information such as programs, tables, and files that realize each function can be placed in a memory, a hard disk, a recording device such as an SSD (Solid State Drive), or a recording medium such as an IC card, an SD card, or a DVD.
- SSD Solid State Drive
- control lines and information lines indicate those that are considered necessary for explanation, and do not necessarily indicate all the control lines and information lines in the product. In practice, it can be considered that almost all configurations are interconnected.
- the application field of the present invention is not limited to the railway business, but the aircraft operation and MaaS (Mobility as a Service). It can also be applied to resource allocation in the transportation service industry, production industry, and other service industries.
- Multi-center collaboration planning system 101
- Plan cooperation destination response providing device 102
- Network 103 Self-evaluation device for planning
- Data reading device 105
- Control device 106
- Alternative plan generator 107
- Plan adjustment time estimator 108
Landscapes
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Engineering & Computer Science (AREA)
- Entrepreneurship & Innovation (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Operations Research (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Marketing (AREA)
- Development Economics (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Game Theory and Decision Science (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biodiversity & Conservation Biology (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- General Factory Administration (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21821154.8A EP4167156A4 (en) | 2020-06-10 | 2021-02-17 | Multi-subject cooperation planning system and multi-subject cooperation planning method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-100871 | 2020-06-10 | ||
| JP2020100871A JP7438857B2 (ja) | 2020-06-10 | 2020-06-10 | 多主体連携計画システムおよび多主体連携計画方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021250946A1 true WO2021250946A1 (ja) | 2021-12-16 |
Family
ID=78847144
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/005997 Ceased WO2021250946A1 (ja) | 2020-06-10 | 2021-02-17 | 多主体連携計画システムおよび多主体連携計画方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4167156A4 (https=) |
| JP (1) | JP7438857B2 (https=) |
| WO (1) | WO2021250946A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4372643A1 (en) * | 2022-11-18 | 2024-05-22 | Honda Research Institute Europe GmbH | Method for improving automated scheduling, scheduling server and system for automated scheduling |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011096141A (ja) | 2009-10-30 | 2011-05-12 | Asprova Corp | 複数工場の生産スケジュール作成方法 |
| WO2013084268A1 (ja) * | 2011-12-09 | 2013-06-13 | 株式会社日立製作所 | 異主体間連携による資源融通方式 |
| WO2015068231A1 (ja) | 2013-11-07 | 2015-05-14 | 株式会社 日立製作所 | 計画連携システムおよび計画連携方法 |
| JP2015141524A (ja) * | 2014-01-28 | 2015-08-03 | 富士通株式会社 | 合意形成支援方法、装置、及びプログラム |
| US20150286862A1 (en) * | 2014-04-07 | 2015-10-08 | Basware Corporation | Method for Statistically Aided Decision Making |
| WO2017187569A1 (ja) * | 2016-04-27 | 2017-11-02 | 三菱電機株式会社 | 予約管理装置、予約管理方法及び予約管理プログラム |
| JP2020012131A (ja) | 2018-07-13 | 2020-01-23 | 日立化成株式会社 | エッチング装置、エッチング方法及びプリント配線板の製造方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10339478B2 (en) * | 2014-03-26 | 2019-07-02 | Ion Geophysical Corporation | Simultaneous operations coordination and planning system |
-
2020
- 2020-06-10 JP JP2020100871A patent/JP7438857B2/ja active Active
-
2021
- 2021-02-17 EP EP21821154.8A patent/EP4167156A4/en active Pending
- 2021-02-17 WO PCT/JP2021/005997 patent/WO2021250946A1/ja not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011096141A (ja) | 2009-10-30 | 2011-05-12 | Asprova Corp | 複数工場の生産スケジュール作成方法 |
| WO2013084268A1 (ja) * | 2011-12-09 | 2013-06-13 | 株式会社日立製作所 | 異主体間連携による資源融通方式 |
| WO2015068231A1 (ja) | 2013-11-07 | 2015-05-14 | 株式会社 日立製作所 | 計画連携システムおよび計画連携方法 |
| JP2015141524A (ja) * | 2014-01-28 | 2015-08-03 | 富士通株式会社 | 合意形成支援方法、装置、及びプログラム |
| US20150286862A1 (en) * | 2014-04-07 | 2015-10-08 | Basware Corporation | Method for Statistically Aided Decision Making |
| WO2017187569A1 (ja) * | 2016-04-27 | 2017-11-02 | 三菱電機株式会社 | 予約管理装置、予約管理方法及び予約管理プログラム |
| JP2020012131A (ja) | 2018-07-13 | 2020-01-23 | 日立化成株式会社 | エッチング装置、エッチング方法及びプリント配線板の製造方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4167156A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4167156A4 (en) | 2024-05-29 |
| JP2021196695A (ja) | 2021-12-27 |
| JP7438857B2 (ja) | 2024-02-27 |
| EP4167156A1 (en) | 2023-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11354121B2 (en) | Software portfolio management system and method | |
| Al-Turki et al. | Integrated maintenance planning | |
| CN105787637A (zh) | 工厂管理系统 | |
| US20210174274A1 (en) | Systems and methods for modeling organizational entities | |
| Gharoun et al. | An integrated approach to joint production planning and reliability-based multi-level preventive maintenance scheduling optimisation for a deteriorating system considering due-date satisfaction | |
| Lee et al. | Decision tree approach to classify and quantify cumulative impact of change orders on productivity | |
| US20130124243A1 (en) | System and method for creating documents to manage a proposal lifecycle | |
| WO2022016093A9 (en) | Collaborative, multi-user platform for data integration and digital content sharing | |
| US20230033597A1 (en) | Multi-subject cooperation plan system and multi-subject cooperation plan method | |
| JP7525719B1 (ja) | 採用支援システム、採用支援方法及びプログラム | |
| Lau et al. | Virtual agent modeling of an agile supply chain infrastructure | |
| WO2021250946A1 (ja) | 多主体連携計画システムおよび多主体連携計画方法 | |
| JP2021117851A5 (https=) | ||
| Maserang | Project management: Tools & techniques | |
| JP2004178480A (ja) | 取引伝票管理方法及び取引伝票管理プログラム | |
| Sima | Executing, Monitoring and Controlling a Project, the right way | |
| Tanbour et al. | Forming Software Development Team: Machine-Learning Approach | |
| Muthusamy et al. | Using Microsoft Project as planning, monitoring and controlling tool for project success–A case study of construction projects in Malaysia | |
| Farr et al. | Planning guide for computer program development | |
| Jain et al. | Design of a New Agile Methodology: Eclectic--An Approach to Overcome Existing Challenges. | |
| JP7636057B1 (ja) | 情報処理システム、情報処理方法及びプログラム | |
| US20170270459A1 (en) | Device, System, and Method for Tracking Job Management | |
| Kurt et al. | Resource constrained multi-project scheduling: application in software company | |
| Zouncourides-Lull | Applying PMI methodology to translation and localization projects | |
| Yee et al. | Tender And Asset Management System For Office Equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21821154 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021821154 Country of ref document: EP Effective date: 20230110 |