WO2021033390A1 - Assessment system, assessment method, and program - Google Patents
Assessment system, assessment method, and program Download PDFInfo
- Publication number
- WO2021033390A1 WO2021033390A1 PCT/JP2020/021948 JP2020021948W WO2021033390A1 WO 2021033390 A1 WO2021033390 A1 WO 2021033390A1 JP 2020021948 W JP2020021948 W JP 2020021948W WO 2021033390 A1 WO2021033390 A1 WO 2021033390A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- stirring
- unit
- state
- determination system
- determination
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 15
- 238000003756 stirring Methods 0.000 claims description 153
- 230000008859 change Effects 0.000 claims description 48
- 238000000605 extraction Methods 0.000 claims description 22
- 230000007246 mechanism Effects 0.000 claims description 12
- 239000000284 extract Substances 0.000 claims description 4
- 230000008569 process Effects 0.000 claims description 3
- 238000005259 measurement Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 9
- 238000001514 detection method Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 6
- 239000007788 liquid Substances 0.000 description 6
- 230000015654 memory Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 230000005489 elastic deformation Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 230000010354 integration Effects 0.000 description 3
- 238000013019 agitation Methods 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 239000007864 aqueous solution Substances 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 239000010426 asphalt Substances 0.000 description 1
- 235000008429 bread Nutrition 0.000 description 1
- 235000014121 butter Nutrition 0.000 description 1
- 239000004568 cement Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 239000004567 concrete Substances 0.000 description 1
- 235000009508 confectionery Nutrition 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 239000006071 cream Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000004898 kneading Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 235000013310 margarine Nutrition 0.000 description 1
- 239000003264 margarine Substances 0.000 description 1
- 239000008268 mayonnaise Substances 0.000 description 1
- 235000010746 mayonnaise Nutrition 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000004570 mortar (masonry) Substances 0.000 description 1
- 235000012149 noodles Nutrition 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000012549 training Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N11/00—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties
- G01N11/10—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material
- G01N11/14—Investigating flow properties of materials, e.g. viscosity, plasticity; Analysing materials by determining flow properties by moving a body within the material by using rotary bodies, e.g. vane
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
Definitions
- the present disclosure relates to a determination system, a determination method, and a program for determining the state of the agitated object to be agitated by the agitator.
- Patent Document 1 discloses a viscosity change detecting element for detecting a viscosity change of a liquid.
- the viscosity change detection element includes an elastic body capable of flexural elastic deformation and / or torsional elastic deformation, and a movable permanent magnet attached directly to the elastic body or via a connecting member so as to move according to the deformation of the elastic body. And have.
- a part of the elastic body is fixed to a support for supporting the viscosity change detection element, so that the elastic body is flexed and elastically deformed with rotation and / or vibration in a rotating liquid. And / or twist elastic deformation occurs.
- the relative position of the movable permanent magnet with respect to the external detection means provided at the fixed position changes according to the change in the viscosity of the liquid, and the change in the viscosity of the liquid is detected by detecting the relative position change by the external detection means. Can be detected.
- the acquisition unit of the determination system acquires waveform data showing a waveform related to the current supplied to the drive device that drives the stirrer that agitates the object to be agitated.
- the determination unit acquires the force applied to the drive device obtained from the waveform data.
- the state of the agitated object is determined based on the change caused by the component in the specific direction of.
- This judgment system can improve the accuracy of judgment of the state of the agitated object.
- FIG. 1 is a block diagram of the determination system of the embodiment.
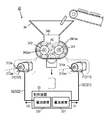
- FIG. 2 is a perspective view of the stirrer of the determination system of the embodiment.
- FIG. 3 is a diagram showing a waveform related to the current supplied to the driving device of the stirrer.
- FIG. 4 is a diagram showing a waveform related to the current supplied to the driving device of the stirrer.
- FIG. 5 is a diagram showing a frequency component of a current supplied to the driving device of the stirrer.
- FIG. 6 is a diagram showing a frequency component of a current supplied to the driving device of the stirrer.
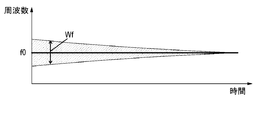
- FIG. 7 is a diagram showing a frequency range of the current supplied to the driving device of the stirrer.
- FIG. 8 is a flowchart of the operation of the determination system.
- FIG. 9 is a diagram showing an example of control using the determination system.
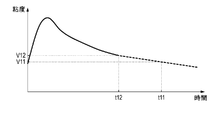
- FIG. 10 is a diagram showing another control using the determination system.
- FIG. 1 is a block diagram of the determination system 10 of the embodiment.
- FIG. 2 is a perspective view of the stirrer 30 using the determination system 10.
- the determination system 10 includes an acquisition unit 11 and a determination unit 13.
- the acquisition unit 11 acquires waveform data showing a waveform related to the current I30 supplied to the driving device 31 of the agitator 30 that agitates the agitated object 40.
- the determination unit 13 determines the state of the stirring object 40 from the change caused by the component of the force applied to the driving device 31 in the specific direction obtained from the waveform data.
- the determination system 10 and the stirrer 30 constitute a stirring system 1001.
- the determination system 10 in determining the state of the agitated object 40, waveform data showing a waveform related to the current I30 supplied to the drive device 31 of the agitator 30 is used. That is, in determining the state of the stirring object 40, the determination system 10 obtains waveform data showing a waveform related to the current I30 supplied to the drive device 31.
- the state of the stirring object 40 is determined in the surrounding environment of the agitator 30. Be less affected. Therefore, according to the determination system 10, the accuracy of determining the state of the stirring object 40 can be improved.
- Patent Document 1 In the viscosity change detection element disclosed in Patent Document 1, it is necessary for the viscosity change detection element to actually come into contact with a liquid (object to be agitated), and damage / deterioration in a high temperature, an oil atmosphere, or the like becomes a problem. Further, Patent Document 1 utilizes a change caused by a flexural elastic deformation and / or a torsional elastic deformation of an elastic body accompanied by rotation and / or vibration, and such a change is affected by ambient vibration and noise. Easy to receive. Therefore, the viscosity change detection element disclosed in Patent Document 1 has insufficient accuracy in determining the state of the agitated object.
- the accuracy of determining the state of the stirring object 40 can be improved.
- the determination system 10 determines the state of the agitated object 40 to be agitated by the agitator 30.
- the stirrer 30 stirs the agitated object 40.
- stirring may include concepts such as dispersion, kneading, mixing and the like. Therefore, the stirrer 30 is not a stirrer in a strict sense, but may be a disperser, a kneader, a mixer, or the like.
- the object to be agitated 40 is made of one or more kinds of materials. That is, the agitated object 40 may be made of a single material or may be made of two or more materials (for example, different materials). Examples of the 40 objects to be agitated include fluids, powders and the like. More specifically, the stirring object 40 may be a resin material such as an aqueous solution, a mixed gas, or rubber.
- the stirring object 40 may be a dispersion in which a solid substance is dispersed in a liquid such as water, and may be, for example, a mixture of cement and water (concrete, mortar, asphalt, etc.).
- the stirring object 40 may be a food product, and examples thereof include butter, margarine, mayonnaise, cream, minced meat, rice cake, and dough (dough for bread, confectionery, noodles, etc.).
- the stirrer 30 shown in FIG. 2 stirs the agitated object 40 to obtain the agitated object 40 having a predetermined state.
- the stirrer 30 includes a drive device 31, an electric wire 32, a control device 33, and a mechanism unit 34.
- the mechanical unit 34 stirs the agitated object 40.
- the mechanism unit 34 has a stirring space 340 inside for stirring the stirring object 40.
- the mechanism unit 34 includes a plurality of rotating bodies 341 and 342 for stirring the stirring object 40 in the stirring space 340.
- the rotating bodies 341 and 342 are, for example, stirring blades.
- the two rotating bodies 341 and 342 can rotate independently of each other.
- the stirring object 40 is agitated by the rotation of the rotating bodies 341 and 342.
- the drive device 31 drives the mechanism unit 34.
- the drive device 31 is the power source for the mechanism unit 34.
- the drive device 31 includes a plurality of motors 311, 312.
- the output of the motors 311, 312 changes according to the given current.
- the motors 311, 312 rotate the rotating bodies 341 and 342 of the stirrer 30 independently of each other.
- the rotating shaft 311ax on which the rotor 311a of the motor 311 rotates is parallel to the shaft 341ax on which the rotating body 341 rotates.
- the rotating shaft 312ax on which the rotor 312a of the motor 312 rotates is parallel to the rotating shaft 342ax of the rotating body 342.
- Motors 311, 312 are AC motors that operate with AC.
- the AC motor may be a three-phase AC motor or a single-phase AC motor.
- the motors 311, 312 change their output, that is, the rotation speed (rotational speed per unit time) according to the change in the reference frequency of the given alternating current.
- the reference frequency is not high, the output will be large (the output shaft will rotate fast and the rotation speed will be high), and if the reference frequency is low, the output will be small (the output shaft will rotate slowly and the rotation speed will be low). Become).
- the control device 33 controls the drive device 31.
- the control device 33 is connected to the drive device 31 via the electric wire 32, and supplies the current I30 to the drive device 31 via the electric wire 32.
- the control device 33 includes power supply devices 331 and 332.
- the electric wire 32 includes electric wires 321 and 322.
- the power supply devices 331 and 332 are connected to the motors 31 and 312 of the drive device 31 via electric wires 321 and 322, respectively, and the currents I31 and I32 are supplied to the motors 31 and 312 of the drive device 31 by the electric wires 321 and 322, respectively.
- the currents I31 and I32 when the currents I31 and I32 are not distinguished, they may be simply referred to as the current I30.
- the power supply devices 331 and 332 supply the currents I31 and I32 to the motors 31 and 312 of the drive device 31 in order to stir the stirring object 40 by the mechanism unit 34, respectively. That is, the currents I31 and I32 are supplied to the drive device 31 in a state where the stirrer 30 is stirring the stirring object 40.
- the motors 311, 312 are AC motors
- the currents I31 and I32 are ACs having a reference frequency.
- the power supply devices 331 and 332 adjust the reference frequencies of the currents I31 and I32.
- the judgment system 10 determines the viscosity of the stirring target 40 as the state of the stirring target 40. That is, the determination system 10 has a function as a viscosity measurement system. As shown in FIG. 1, the determination system 10 includes a measurement unit 20. Further, the determination system 10 includes an acquisition unit 11, an extraction unit 12, a determination unit 13, an output unit 14, a collection unit 15, a generation unit 16, and a storage unit 17.
- the measuring unit 20 measures the current I30 supplied to the driving device 31 of the stirrer 30 and outputs waveform data (current waveform data) showing a waveform related to the current I30.
- the measuring unit 20 is attached to an electric wire 32 through which the current I30 from the control device 33 to the driving device 31 flows.
- the measuring unit 20 includes a current sensor.
- the measuring unit 20 includes a differential type current sensor. Therefore, the waveform data is data showing a differential waveform of the current I30. Examples of this type of differential current sensor include a current transformer and a search coil. By using this kind of differential type current sensor, the measuring unit 20 can be retrofitted to the electric wire 32.
- the measuring unit 20 In the determination system 10, it is not necessary to install the measuring unit 20 in the vicinity of the rotors 311a and 312a of the drive device 31, especially the motors 311, 312. Since the measuring unit 20 only needs to be able to measure the current I30 supplied to the driving device 31, it can be installed inside a control panel or the like that houses the control device 33. Therefore, in the mechanism unit 34, there is no need for a device for installing the measurement unit 20 and wiring, and there is no need for balance adjustment of the mechanism unit 34 due to the installation of the measurement unit 20. Further, for this reason, when installing the measuring unit 20, it is not necessary to take measures (for example, oil resistance measures, heat resistance measures, waterproof measures, etc.) so that the measuring unit 20 can be used while stirring the stirring object 40.
- measures for example, oil resistance measures, heat resistance measures, waterproof measures, etc.
- the maintenance burden of the measuring unit 20 can be reduced.
- the waveform data can be acquired even when the stirrer 30 is working, that is, the stirring target 40 is being stirred. Therefore, it is not necessary to interrupt the work of the stirrer 30 for the judgment by the judgment system 10, and therefore, the lengthening of the stirring work due to the judgment can be reduced. Further, since the waveform data can be acquired even during the work of the agitator 30, the state of the agitated object 40 can be grasped at any time.
- FIGS. 3 and 4 show time-axis waveforms of the current I30 supplied to the drive device 31 of the stirrer 30.
- the time axis waveform shows the value of the current with respect to time.
- FIG. 3 shows the waveform of the current I30 immediately after the start of stirring the stirring object 40.
- FIG. 4 shows the waveform of the current I30 after a sufficient time has elapsed from the start of stirring the stirring object 40.
- FIGS. 3 and 4 are virtual waveforms rather than actual waveforms.
- FIG. 5 and 6 show frequency axis waveforms showing the frequency components of the current I30 supplied to the drive device 31 of the stirrer 30.
- the frequency axis waveform shows the value of the current component with respect to the frequency.
- FIG. 5 shows the frequency component of the current I30 of FIG. 3, that is, the frequency component of the current I30 immediately after the start of stirring the stirring object 40.
- the peak W1 at the reference frequency f0 and the peaks W2 and W3 of the sideband wave at the reference frequency f0 can be seen.
- FIG. 6 shows the frequency component of the current I30 of FIG. 4, that is, the frequency component of the current I30 after a sufficient time has elapsed from the start of stirring the stirring object 40.
- the peak W1 of the reference frequency f0 is seen, and the peaks W2 and W3 corresponding to the sideband waves with respect to the reference frequency f0 are not seen.
- FIG. 7 shows the time change of the distribution range of the frequency component of the current I30.
- the range Wf of the frequency component of the current I30 is distributed around the reference frequency f0, and converges to the reference frequency f0 with the passage of time.
- the viscosity of the stirring target 40 decreases as time elapses from the start of stirring.
- the stirring target 40 becomes hard enough to be uniformly mixed, the viscosity of the stirring target 40 increases as time elapses from the start of stirring.
- the change in the distribution range Wf of the frequency component of the current I30 is caused by the component of the force applied to the drive device 31, that is, the force applied to the rotors 311a and 312a of the motors 311, 312 in a specific direction.
- the rotating bodies 341 and 342 are difficult to rotate smoothly, and irregular forces are applied to the rotating bodies 341 and 342 in the rotation direction of the rotating bodies 341 and 342.
- the state of the agitated object 40 agitated by the agitator 30 is determined by utilizing the correlation between the state of the agitated object 40 and the change caused by the component of the force applied to the drive device 31 in a specific direction. judge.
- the specific direction described above depends on the configuration of the stirrer 30.
- the specific direction may change depending on the direction in which the stirrer 30 exerts a force on the stirring object 40 with respect to the rotating shafts 311ax and 312ax of the rotors 311a and 312a of the motors 311, 312. .
- the specific direction described above is a direction intersecting the rotation axis of the rotor 311a of the motor 311.
- the acquisition unit 11 acquires waveform data (current waveform data) showing a waveform related to the current I30 supplied to the drive device 31 of the stirrer 30. More specifically, the acquisition unit 11 is connected to the measurement unit 20 and acquires waveform data from the measurement unit 20. The waveform data from the measuring unit 20 is data showing a waveform obtained by differentiating the current I30 with respect to time. The acquisition unit 11 acquires waveform data (current waveform data) showing waveforms related to the currents I31 and I32 supplied to the motors 31 and 312 of the drive device 31 of the stirrer 30.
- the extraction unit 12 acquires the information used by the determination unit 13 from the waveform data acquired by the acquisition unit 11.
- the information used by the determination unit 13 is information regarding a change caused by a component of the force applied to the drive device 31 in a specific direction.
- the extraction unit 12 converts the time-axis waveform (see FIGS. 3 and 4) indicated by the waveform data acquired by the acquisition unit 11 into a frequency-axis waveform (see FIGS. 5 and 6).
- the time axis waveform can be converted into a frequency axis waveform by, for example, a fast Fourier transform (FFT).
- FFT fast Fourier transform
- the extraction unit 12 extracts from the frequency axis waveform obtained by the conversion a portion of interest that may include a change due to a component of the force applied to the driving device 31 in a specific direction.
- the distribution range Wf of the frequency component of the current I30 spreads around the reference frequency f0 and converges to the reference frequency f0 with the passage of time.
- the frequency component of the current I30 includes the reference frequency f0 and the sideband wave, and the change in the state of the stirring object 40 may affect the change in the sideband wave more than the reference frequency f0. Therefore, the extraction unit 12 may extract a portion corresponding to the sideband wave as a portion of interest from the frequency axis waveform.
- the determination unit 13 determines the state of the agitated object 40 to be agitated by the agitator 30 from the change caused by the component of the force applied to the drive device 31 in the specific direction. In the present embodiment, the determination unit 13 determines the state of the stirring object 40 based on the portion of interest extracted by the extraction unit 12. In the present embodiment, the determination unit 13 determines the viscosity of the stirring target 40 as the state of the stirring target 40.
- the determination unit 13 determines the state of the stirring object 40 by using the learned model M11.
- the trained model M11 is designed to output a value (state value) indicating the state of the stirring object 40 for a given input (part of interest).
- the determination unit 13 gives the portion of interest obtained from the extraction unit 12 to the trained model M11, and determines the state of the stirring object 40 based on the state value obtained from the trained model M11.
- the state value may correspond to the viscosity, and in this case, the determination unit 13 can obtain the viscosity (current viscosity) of the stirrer 30 from the state value obtained from the trained model M11.
- Such a trained model M11 can be generated by supervised learning using learning data (data set) that defines the relationship between the label corresponding to the state value and the portion of interest.
- the trained model M11 is stored in the storage unit 17.
- the storage unit 17 may store the learned model M11 for each type of motors 311, 312. That is, the determination unit 13 may use different trained models M11 for each of the motors 311, 312.
- the determination unit 13 can determine the state of the stirring object 40.
- the determination unit 13 can determine whether or not the stirring target object 40 has a predetermined softness.
- the work of adjusting the softness of the stirring object 40 to a predetermined softness can be easily performed.
- the determination unit 13 can determine whether or not the stirring target 40 has a predetermined hardness. As a result, the work of adjusting the hardness of the agitated object 40 to a predetermined hardness can be easily performed.
- the acquisition unit 11 obtains waveform data of two types of currents I31 and I32. Therefore, the state of the agitated object 40 can be obtained from each of the waveform data of the two types of currents I31 and I32.
- the determination unit 13 may determine the final state of the stirring object 40 from the state of the stirring target 40 corresponding to the waveform data of the two types of currents I31 and I32, respectively. For example, a representative value of the viscosity of the stirring object 40 corresponding to the currents I31 and I32 may be used as the final viscosity of the stirring object 40.
- the representative value can be appropriately selected from an average value, a maximum value, a minimum value, a mode value, and the like.
- the output unit 14 outputs the result of the determination by the determination unit 13.
- the output unit 14 includes, for example, an audio output device and a display.
- the display is, for example, a thin display device such as a liquid crystal display or an organic EL display.
- the output unit 14 may display the result of the determination by the determination unit 13 on the display or notify the result by the voice output device. Further, the output unit 14 may transmit or store the result of the determination by the determination unit 13 as data to the external device.
- the output unit 14 does not need to have both an audio output device and a display. Further, the output unit 14 can also output the result of the determination by the determination unit 13 by e-mail or the like.
- the collection unit 15 collects and accumulates the data acquired by the acquisition unit 11.
- the data acquired by the acquisition unit 11 includes the waveform data from the measurement unit 20.
- the data collected by the collecting unit 15 is used for generating and improving the trained model M11.
- the generation unit 16 generates the trained model M11 used by the determination unit 13.
- the generation unit 16 generates a trained model M11 by a machine learning algorithm using a certain amount or more of training data.
- the learning data may be prepared in advance, or may be generated from the data accumulated by the collecting unit 15. By adopting the learning data generated from the data accumulated by the collecting unit 15, it is expected that the accuracy of the state determination using the trained model M11 will be further improved.
- the generation unit 16 evaluates the newly generated trained model M11, and when the evaluation of the trained model M11 improves, the trained model M11 stored in the storage unit 17 is replaced with the newly generated trained model M11.
- the trained model M11 is updated.
- supervised learning can be appropriately used as described above.
- supervised learning a typical multi-layer neural network having a supervised learning mechanism can be used.
- the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, and the generation unit 16 are, for example, one or more processors (for example, a microprocessor). It can be realized by a computer system including one or more memories. That is, when one or more processors execute one or more programs stored in one or more memories, the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, and so on. It functions as a generator 16.
- the one or more programs may be recorded in advance in a memory, may be recorded through a telecommunication line such as the Internet, or may be recorded and provided on a non-temporary recording medium such as a memory card.
- the acquisition unit 11 acquires waveform data (current waveform data) showing waveforms related to the currents I31 and I32 supplied to the motors 31 and 312 of the drive device 31 of the stirrer 30 (step S11).
- the extraction unit 12 converts the waveform indicated by the waveform data acquired by the acquisition unit 11 into a frequency axis waveform, and the force applied to the rotors 311a and 312a of the drive device 31, particularly the motors 311 and 312, from the frequency axis waveform.
- a portion containing a change due to a component in a specific direction of is extracted (step S12).
- the determination unit 13 determines the state of the stirring object 40 from the portion of interest extracted by the extraction unit 12 using the plurality of trained models M11 (step S13).
- the output unit 14 outputs the result of the determination by the determination unit 13 (S14). In this way, the determination system 10 can determine the state of the agitated object 40 to be agitated by the agitator 30 from the waveform data showing the waveforms related to the currents I31 and I32 supplied to the drive device 31, and present the result. ..
- FIG. 9 shows an example of control of the stirrer 30 using the determination system 10.
- the determination system 10 determines the viscosity as the state of the agitated object 40.
- FIG. 9 determines the control conditions of the stirrer 30 in which the viscosity of the stirring object 40 becomes the target value V11 based on the history (time change) of the state (viscosity) of the stirring object 40 determined by the determination system 10.
- a predicted value of the state (viscosity) of the stirring object 40 after the time t12 is obtained from the history (time change) of the state (viscosity) of the stirring object 40 obtained by the time t12. Note that FIG.
- the control conditions of the stirrer 30 are determined in consideration of the difference between the predicted value of the viscosity of the agitated object 40 and the measured value of the viscosity of the agitated object 40.
- the control conditions of the stirrer 30 may include the temperature of the agitated object 40 and the stirring period. For example, by changing the temperature of the stirring object 40, it is possible to obtain the stirring target 40 having a viscosity of the target value V11 without changing the stirring period (stirring end time t11).
- FIG. 10 shows another example of control of the stirrer 30 using the determination system 10.
- the determination system 10 determines the viscosity as the state of the agitated object 40.
- FIG. 10 shows an example of adjusting the stirring period in the stirrer 30 based on the state of the stirring target 40 determined by the determination system 10.
- the determination system 10 determines the viscosity of the agitated object 40. Stirring with the stirrer 30 is continued until the difference between the viscosity value of the stirring object 40 determined by the determination system 10 and the target value V21 becomes zero. That is, the stirring by the stirrer 30 is continued until the viscosity of the stirring object 40 reaches the target value V21.
- the viscosity of the stirring object 40 is determined using the determination system 10, and if the viscosity value V22 of the stirring object 40 at this time is different from the target value V21, stirring by the stirrer 30 is continued. To do. Then, at time t22, since the value of the viscosity of the stirring object 40 determined by the determination system 10 matches the target value V21, the stirring by the stirrer 30 is terminated. As a result, at the end of stirring, it is possible to obtain the stirring object 40 having a viscosity of the target value V21.
- the state of the stirring object 40 can be easily adjusted to a desired state. Therefore, it is not necessary to rely on the feeling of a skilled worker or the like, and it is possible to suppress variations in the state of the agitated object 40.
- the determination system 10 described above includes an acquisition unit 11 and a determination unit 13.
- the acquisition unit 11 acquires waveform data showing a waveform related to the current I30 supplied to the driving device 31 of the agitator 30 that agitates the agitated object 40.
- the determination unit 13 determines the state of the stirring object 40 from the change caused by the component of the force applied to the driving device 31 in the specific direction obtained from the waveform data. According to such a determination system 10, the accuracy of determining the state of the stirring object 40 can be improved.
- the determination system 10 executes the following determination method.
- the determination method includes an acquisition step and a determination step.
- the acquisition step is a step of acquiring waveform data showing a waveform related to the current I30 supplied to the drive device 31 of the stirrer 30 that stirs the stirring object 40.
- the determination step is a step of determining the state of the stirring object 40 from the change caused by the component of the force applied to the driving device 31 in the specific direction obtained from the waveform data. According to such a determination method, the accuracy of determining the state of the stirring object 40 can be improved.
- the judgment system 10 is realized by a computer system including one or more processors. That is, the determination system 10 is realized by executing a program (determination program) by one or more processors.
- This program is a program (computer program) for causing one or more processors to execute the determination method. According to such a program, the accuracy of determining the state of the agitated object 40 can be improved as in the determination method.
- the acquisition unit 11 does not necessarily have to acquire waveform data of two types of currents I31 and I32.
- the acquisition unit 11 may acquire only the waveform data of the current I30 supplied to one of the motors 311, 312, that is, one of the currents I31 and I32.
- the measuring unit 20 needs to measure only one of the currents I31 and I32.
- the acquisition unit 11 may acquire waveform data of a plurality of currents having more than two.
- the acquisition unit 11 may acquire waveform data when the rotation speeds of the rotating bodies 341 and 342 are changed.
- the influence of the state of the stirring object 40 may be reflected in the current I30 supplied to the drive device 31.
- the waveform data of the current I30 acquired by the acquisition unit 11 will change due to the state of the stirring object 40. Therefore, the accuracy of determining the state of the stirring object 40 can be further improved.
- the acquisition unit 11 may acquire waveform data when a predetermined process is performed on the stirring object 40.
- the predetermined treatment is a treatment that positively causes the stirring target 40 to be changed by an external factor. Examples of the predetermined treatment include heating, cooling, pressurizing, depressurizing, and the like of the stirring object 40.
- the state of the agitated object 40 is not limited to the viscosity, but may be a numerical value representing the state of the agitated object 40 such as the Reynolds number, the ratio of solid matter (dumb), and the degree of agitation. Further, the state of the stirring object 40 is not limited to a numerical value, and may be an event such as a normal state, an abnormal state, or an unspecified state. That is, the state of the stirring object 40 may be a quantitative state or a qualitative state.
- the determination system 10 does not necessarily have to include the measurement unit 20.
- the determination system 10 includes the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, the generation unit 16, and the storage unit. It may only have 17.
- the measuring unit 20 does not necessarily have to include a differential type current sensor, and may be another conventionally known current sensor.
- the determination system 10 does not necessarily have to have the collection unit 15, the generation unit 16, and the storage unit 17. That is, the determination system 10 does not have to have a function of updating the trained model M11 by itself. Further, the storage unit 17 does not necessarily have to store a plurality of trained models M11.
- the extraction unit 12 is not essential.
- the determination system 10 does not have to extract the portion including the change caused by the component of the force applied to the driving device 31 in the specific direction.
- the state of the stirrer 30 may be obtained as an output from the trained model M11 by inputting the entire waveform indicated by the waveform data acquired by the acquisition unit 11. That is, the extraction of the portion including the change may be omitted.
- the determination system 10 does not necessarily have to have the output unit 14.
- the determination system 10 may be able to output the state of the stirring object 40 determined by the determination unit 13 to the outside of the determination system 10.
- the determination system 10 may be composed of a plurality of computers, and the functions of the determination system 10 (particularly, the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, and the generation unit 16). ) May be distributed to a plurality of devices.
- the acquisition unit 11, the extraction unit 12, the determination unit 13, and the output unit 14 may be provided in a personal computer or the like installed in a facility having equipment, and the generation unit 16 and the output unit 14 may be provided in an external server or the like. It may be provided.
- the determination system 10 is realized by the cooperation of the personal computer and the server. Further, at least a part of the functions of the determination system 10 may be realized by, for example, the cloud (cloud computing).
- the execution subject of the determination system 10 described above includes a computer system.
- a computer system has a processor and memory as hardware.
- the processor executes the program recorded in the memory of the computer system, the function as the execution subject of the determination system 10 in the present disclosure is realized.
- the program may be pre-recorded in the memory of the computer system or may be provided through a telecommunication line.
- the program may also be provided recorded on a non-temporary recording medium such as a memory card, optical disk, or hard disk drive that can be read by a computer system.
- a processor in a computer system is composed of one or more electronic circuits including a semiconductor integrated circuit (IC) or a large scale integrated circuit (LSI).
- IC semiconductor integrated circuit
- LSI large scale integrated circuit
- ICs and LSIs may be called system LSIs, VLSIs (very large scale integrations), or ULSIs (very large scale integrations), depending on the degree of integration.
- a field programmable gate array (FPPA) that is programmed after the LSI is manufactured, or a reconfigurable logical device that can reconfigure the junction relationships inside the LSI or set up circuit partitions inside the LSI should also be used for the same purpose. Can be done.
- a plurality of electronic circuits may be integrated on one chip, or may be distributed on a plurality of chips. The plurality of chips may be integrated in one device, or may be distributed in a plurality of devices.
- the first aspect is a determination system (10), which includes an acquisition unit (11) and a determination unit (13).
- the acquisition unit (11) acquires waveform data showing waveforms related to currents (I30, I31, I32) supplied to the drive device (31) of the stirrer (30) that agitates the agitated object (40).
- the determination unit (13) determines the state of the stirring object (40) from the change caused by the component of the force applied to the driving device (31) in the specific direction obtained from the waveform data. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
- the second aspect is the determination system (10) based on the first aspect.
- the currents (I30, I31, I32) are supplied to the driving device (31) during stirring of the stirring object (40).
- the state of the agitated object (40) can be determined without interrupting the agitation in the agitator (30).
- the third aspect is the determination system (10) based on the first or second aspect.
- the driving device (31) includes a motor (311, 312) for rotating a rotating body (341, 342) for stirring the stirring object (40).
- the force applied to the drive device (31) is the force applied to the rotors (311a, 312a) of the motor (311, 312). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
- the fourth aspect is the determination system (10) based on the third aspect.
- the driving device (31) includes a plurality of the motors (311 and 312) that independently rotate the plurality of rotating bodies (341 and 342). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
- the fifth aspect is the determination system (10) based on the third or fourth aspect.
- the acquisition unit (11) acquires the waveform data when the rotation speed of the rotating body (341, 342) is changed. According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
- the sixth aspect is a determination system (10) based on any one of the first to fourth aspects.
- the acquisition unit (11) acquires the waveform data when the stirring object (40) is subjected to a predetermined process. According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
- the seventh aspect is a determination system (10) based on any one of the first to sixth aspects.
- the determination unit (13) determines the viscosity of the stirring object (40). According to this aspect, it is possible to determine the viscosity of the agitated object (40).
- the eighth aspect is the determination system (10) based on any one of the first to sixth aspects.
- the stirring object (40) becomes softer as it is uniformly mixed.
- the determination unit (13) determines whether the stirring object (40) has a predetermined softness. According to this aspect, the work of adjusting the softness of the stirring object (40) to a predetermined softness can be easily performed.
- the ninth aspect is a determination system (10) based on any one of the first to sixth aspects.
- the stirring object (40) becomes harder as it is uniformly mixed.
- the determination unit (13) determines whether the stirring object (40) has a predetermined hardness. According to this aspect, the work of adjusting the hardness of the agitated object (40) to a predetermined hardness can be easily performed.
- the tenth aspect is a determination system (10) based on any one of the first to ninth aspects.
- the determination system (10) further includes an extraction unit (12) that converts the waveform into a frequency axis waveform and extracts a portion that may include the change from the frequency axis waveform.
- the determination unit (13) determines the state of the stirring object (40) based on the portion extracted by the extraction unit (12). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
- the eleventh aspect is a determination system (10) based on the tenth aspect.
- the determination unit (13) determines the state of the stirring object (40) from the portion using the trained model (M11). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
- the twelfth aspect is a determination system (10) based on any one of the first to eleventh aspects.
- the determination system (10) further includes a measurement unit (20) that measures the currents (I30, I31, I32) and outputs the waveform data.
- the measuring unit (20) includes a differential type current sensor. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
- the thirteenth aspect is a determination system (10) based on the twelfth aspect.
- the measuring unit (20) is attached to an electric wire (32,321,322) through which the current (I30, I31, I32) flows. According to this aspect, the determination system (10) can be easily implemented.
- the 14th aspect is a determination method, which includes an acquisition step and a determination step.
- the acquisition step is a step of acquiring waveform data showing waveforms related to currents (I30, I31, I32) supplied to the drive device (31) of the stirrer (30) that stirs the stirring object (40).
- the determination step is a step of determining the target state of the stirring object (40) from the change caused by the component of the force applied to the driving device (31) in the specific direction obtained from the waveform data. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
- the fifteenth aspect is a program, which is a program for causing one or more processors to execute the determination method of the fourteenth aspect. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
- Judgment system 11 Acquisition unit 12 Extraction unit 13 Judgment unit 20 Measurement unit 30 Stirrer 31 Drive device 311, 312 Motors 311a, 312a Rotor 32, 321, 322 Electric wire 341,342 Rotating body 40 Stirring object I30, I31, I32 Current M11 trained model
Landscapes
- Chemical & Material Sciences (AREA)
- Biochemistry (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Chemical Kinetics & Catalysis (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Mixers Of The Rotary Stirring Type (AREA)
- Accessories For Mixers (AREA)
Abstract
An acquisition unit of an assessment system according to the present invention acquires waveform data representing a waveform associated with current supplied to an actuator for actuating an agitator for agitating an object to be agitated. An assessment unit assesses the state of the object to be agitated on the basis of changes, obtained from the waveform data, that are caused by a force component of the actuator in a specific direction. This assessment system is capable of improved precision in assessing the state of the object to be agitated.
Description
本開示は、撹拌器により撹拌される撹拌対象物の状態を判定する判定システム、判定方法、及びプログラムに関する。
The present disclosure relates to a determination system, a determination method, and a program for determining the state of the agitated object to be agitated by the agitator.
特許文献1は、液体の粘度変化を検知するための粘度変化検知用素子を開示する。粘度変化検知用素子は、たわみ弾性変形及び/又はねじれ弾性変形が可能な弾性体と、弾性体の変形に応じて移動するように弾性体に直接又は接続部材を介して取り付けられた可動永久磁石とを有する。この粘度変化検知用素子では、粘度変化検知用素子を支持するための支持体に弾性体の一部が固定されることにより、回転液体中で弾性体は回転及び/又は振動を伴うたわみ弾性変形及び/又はねじれ弾性変形を生じる。これによって、液体の粘度変化に応じて、定位置に設けられた外部検出手段に対する可動永久磁石の相対的位置が変化し、係る相対的位置変化を外部検出手段により検出することによって液体の粘度変化を検知し得る。
Patent Document 1 discloses a viscosity change detecting element for detecting a viscosity change of a liquid. The viscosity change detection element includes an elastic body capable of flexural elastic deformation and / or torsional elastic deformation, and a movable permanent magnet attached directly to the elastic body or via a connecting member so as to move according to the deformation of the elastic body. And have. In this viscosity change detection element, a part of the elastic body is fixed to a support for supporting the viscosity change detection element, so that the elastic body is flexed and elastically deformed with rotation and / or vibration in a rotating liquid. And / or twist elastic deformation occurs. As a result, the relative position of the movable permanent magnet with respect to the external detection means provided at the fixed position changes according to the change in the viscosity of the liquid, and the change in the viscosity of the liquid is detected by detecting the relative position change by the external detection means. Can be detected.
判定システムの取得部は、撹拌対象物を撹拌する撹拌器を駆動する駆動装置に供給される電流に関する波形を示す波形データを取得する、判定部は、波形データから得られる、駆動装置にかかる力の特定方向の成分に起因する変化に基づいて撹拌対象物の状態を判定する。
The acquisition unit of the determination system acquires waveform data showing a waveform related to the current supplied to the drive device that drives the stirrer that agitates the object to be agitated. The determination unit acquires the force applied to the drive device obtained from the waveform data. The state of the agitated object is determined based on the change caused by the component in the specific direction of.
この判定システムは、撹拌対象物の状態の判定の精度を向上できる。
This judgment system can improve the accuracy of judgment of the state of the agitated object.
1.実施形態
1.1 概要
図1は、実施形態の判定システム10のブロック図である。図2は判定システム10を用いた撹拌器30の斜視図である。判定システム10は、取得部11と、判定部13とを備える。取得部11は、撹拌対象物40を撹拌する撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データを取得する。判定部13は、波形データから得られる、駆動装置31にかかる力の特定方向の成分に起因する変化から、撹拌対象物40の状態を判定する。判定システム10と撹拌器30とは撹拌システム1001を構成する。 1. 1. Embodiment 1.1 Overview FIG. 1 is a block diagram of thedetermination system 10 of the embodiment. FIG. 2 is a perspective view of the stirrer 30 using the determination system 10. The determination system 10 includes an acquisition unit 11 and a determination unit 13. The acquisition unit 11 acquires waveform data showing a waveform related to the current I30 supplied to the driving device 31 of the agitator 30 that agitates the agitated object 40. The determination unit 13 determines the state of the stirring object 40 from the change caused by the component of the force applied to the driving device 31 in the specific direction obtained from the waveform data. The determination system 10 and the stirrer 30 constitute a stirring system 1001.
1.1 概要
図1は、実施形態の判定システム10のブロック図である。図2は判定システム10を用いた撹拌器30の斜視図である。判定システム10は、取得部11と、判定部13とを備える。取得部11は、撹拌対象物40を撹拌する撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データを取得する。判定部13は、波形データから得られる、駆動装置31にかかる力の特定方向の成分に起因する変化から、撹拌対象物40の状態を判定する。判定システム10と撹拌器30とは撹拌システム1001を構成する。 1. 1. Embodiment 1.1 Overview FIG. 1 is a block diagram of the
撹拌器30においては、撹拌器30で撹拌される撹拌対象物40の状態と、駆動装置31にかかる力の特定方向の成分に起因する変化との間に相関があることが見いだされた。判定システム10では、撹拌対象物40の状態を判定するにあたって、撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データを利用する。つまり、判定システム10では、撹拌対象物40の状態を判定するにあたって、駆動装置31に供給される電流I30に関する波形を示す波形データを得る。そのため、撹拌対象物40に判定用の装置を接触させる場合及び駆動装置31の近傍にセンサを設置する場合等とは異なり、撹拌対象物40の状態の判定においては、撹拌器30の周辺環境の影響を受け難くなる。したがって、判定システム10によれば、撹拌対象物40の状態の判定の精度を向上できる。
In the stirrer 30, it was found that there is a correlation between the state of the agitated object 40 agitated by the stirrer 30 and the change caused by the component of the force applied to the drive device 31 in a specific direction. In the determination system 10, in determining the state of the agitated object 40, waveform data showing a waveform related to the current I30 supplied to the drive device 31 of the agitator 30 is used. That is, in determining the state of the stirring object 40, the determination system 10 obtains waveform data showing a waveform related to the current I30 supplied to the drive device 31. Therefore, unlike the case where the determination device is brought into contact with the stirring object 40 and the case where the sensor is installed in the vicinity of the driving device 31, the state of the stirring object 40 is determined in the surrounding environment of the agitator 30. Be less affected. Therefore, according to the determination system 10, the accuracy of determining the state of the stirring object 40 can be improved.
特許文献1に開示の粘度変化検知用素子では、粘度変化検知用素子が実際に液体(撹拌対象物)に接触させる必要があり、高温、油雰囲気等での破損・劣化が問題になる。また、特許文献1では、弾性体の、回転及び/又は振動を伴うたわみ弾性変形及び/又はねじれ弾性変形に起因する変化を利用するが、このような変化は、周辺の振動やノイズの影響を受けやすい。そのため、特許文献1に開示の粘度変化検知用素子では、撹拌対象物の状態の判定の精度が不十分である。
In the viscosity change detection element disclosed in Patent Document 1, it is necessary for the viscosity change detection element to actually come into contact with a liquid (object to be agitated), and damage / deterioration in a high temperature, an oil atmosphere, or the like becomes a problem. Further, Patent Document 1 utilizes a change caused by a flexural elastic deformation and / or a torsional elastic deformation of an elastic body accompanied by rotation and / or vibration, and such a change is affected by ambient vibration and noise. Easy to receive. Therefore, the viscosity change detection element disclosed in Patent Document 1 has insufficient accuracy in determining the state of the agitated object.
対して、実施形態の判定システム10によれば、前述のように、撹拌対象物40の状態の判定の精度を向上できる。
On the other hand, according to the determination system 10 of the embodiment, as described above, the accuracy of determining the state of the stirring object 40 can be improved.
1.2 詳細
以下、判定システム10について詳細に説明する。判定システム10は、撹拌器30で撹拌される撹拌対象物40の状態を判定する。 1.2 Details Hereinafter, thedetermination system 10 will be described in detail. The determination system 10 determines the state of the agitated object 40 to be agitated by the agitator 30.
以下、判定システム10について詳細に説明する。判定システム10は、撹拌器30で撹拌される撹拌対象物40の状態を判定する。 1.2 Details Hereinafter, the
撹拌器30は、撹拌対象物40を撹拌する。ここで、撹拌は、分散、混練、混合等の概念を含み得る。よって、撹拌器30は、厳密な意味での撹拌器ではなく、分散器、混練器、混合器等であってもよい。撹拌対象物40は、1種以上の材料で形成されている。つまり、撹拌対象物40は、単一材料よりなっていていてもよいし、二以上の材料(例えば、異種材料)よりなっていてもよい。撹拌対象物40例としては、流体、粉体等が挙げられる。より具体的には、撹拌対象物40は、水溶液、混合ガス、ゴム等の樹脂材料であってもよい。また、撹拌対象物40は、水等の液体に固形物を分散させた分散体であってもよく、例えば、セメントと水の混合物(コンクリート、モルタル、アスファルト等)であってよい。また、撹拌対象物40は、食料品であってよく、バター、マーガリン、マヨネーズ、クリーム、ミンチ肉、もち、生地(パン、菓子、麺類等の生地)等が挙げられる。
The stirrer 30 stirs the agitated object 40. Here, stirring may include concepts such as dispersion, kneading, mixing and the like. Therefore, the stirrer 30 is not a stirrer in a strict sense, but may be a disperser, a kneader, a mixer, or the like. The object to be agitated 40 is made of one or more kinds of materials. That is, the agitated object 40 may be made of a single material or may be made of two or more materials (for example, different materials). Examples of the 40 objects to be agitated include fluids, powders and the like. More specifically, the stirring object 40 may be a resin material such as an aqueous solution, a mixed gas, or rubber. Further, the stirring object 40 may be a dispersion in which a solid substance is dispersed in a liquid such as water, and may be, for example, a mixture of cement and water (concrete, mortar, asphalt, etc.). The stirring object 40 may be a food product, and examples thereof include butter, margarine, mayonnaise, cream, minced meat, rice cake, and dough (dough for bread, confectionery, noodles, etc.).
1.2.1 撹拌器
図2に示す撹拌器30は、撹拌対象物40を撹拌することで、所定の状態を有する撹拌対象物40を得る。撹拌器30は、駆動装置31と、電線32と、制御装置33と、機構部34とを含む。 1.2.1 Stirrer Thestirrer 30 shown in FIG. 2 stirs the agitated object 40 to obtain the agitated object 40 having a predetermined state. The stirrer 30 includes a drive device 31, an electric wire 32, a control device 33, and a mechanism unit 34.
図2に示す撹拌器30は、撹拌対象物40を撹拌することで、所定の状態を有する撹拌対象物40を得る。撹拌器30は、駆動装置31と、電線32と、制御装置33と、機構部34とを含む。 1.2.1 Stirrer The
機構部34は、撹拌対象物40を撹拌する。機構部34は、撹拌対象物40を撹拌するための撹拌スペース340を内部に有している。機構部34は、撹拌スペース340内に、撹拌対象物40の撹拌のための複数の回転体341,342を備える。回転体341,342は、一例として、撹拌羽根である。2つの回転体341,342は互いに独立して回転可能である。機構部34では、回転体341,342が回転することによって撹拌対象物40が撹拌される。
The mechanical unit 34 stirs the agitated object 40. The mechanism unit 34 has a stirring space 340 inside for stirring the stirring object 40. The mechanism unit 34 includes a plurality of rotating bodies 341 and 342 for stirring the stirring object 40 in the stirring space 340. The rotating bodies 341 and 342 are, for example, stirring blades. The two rotating bodies 341 and 342 can rotate independently of each other. In the mechanism unit 34, the stirring object 40 is agitated by the rotation of the rotating bodies 341 and 342.
駆動装置31は機構部34を駆動する。言い換えれば、駆動装置31は、機構部34の動力源である。駆動装置31は、複数のモータ311,312を含む。モータ311,312の出力は与えられた電流に応じて変化する。モータ311,312は撹拌器30の回転体341,342をそれぞれ互いに独立して回転させる。本実施形態では、モータ311のロータ311aが回転する回転軸311axは、回転体341が回転する軸341axに平行である。同様に、モータ312のロータ312aが回転する回転軸312axは、回転体342の回転の軸342axに平行である。
The drive device 31 drives the mechanism unit 34. In other words, the drive device 31 is the power source for the mechanism unit 34. The drive device 31 includes a plurality of motors 311, 312. The output of the motors 311, 312 changes according to the given current. The motors 311, 312 rotate the rotating bodies 341 and 342 of the stirrer 30 independently of each other. In the present embodiment, the rotating shaft 311ax on which the rotor 311a of the motor 311 rotates is parallel to the shaft 341ax on which the rotating body 341 rotates. Similarly, the rotating shaft 312ax on which the rotor 312a of the motor 312 rotates is parallel to the rotating shaft 342ax of the rotating body 342.
モータ311,312は交流で動作する交流モータである。交流モータは、三相交流モータや単相交流モータであってよい。具体的には、モータ311,312は、与えられた交流電流の基準周波数の変化に応じて出力すなわち回転速度(単位時間当たりの回転数)が変化する。一例として、基準周波数が高くなければ出力が大きくなり(出力軸の回転が速く、回転速度が大きくなり)、基準周波数が低くなれば出力が小さくなる(出力軸の回転が遅く、回転速度が小さくなる)。
Motors 311, 312 are AC motors that operate with AC. The AC motor may be a three-phase AC motor or a single-phase AC motor. Specifically, the motors 311, 312 change their output, that is, the rotation speed (rotational speed per unit time) according to the change in the reference frequency of the given alternating current. As an example, if the reference frequency is not high, the output will be large (the output shaft will rotate fast and the rotation speed will be high), and if the reference frequency is low, the output will be small (the output shaft will rotate slowly and the rotation speed will be low). Become).
制御装置33は、駆動装置31を制御する。制御装置33は、電線32を介して駆動装置31に接続され、電線32を介して電流I30を駆動装置31に供給する。より詳細には、制御装置33は、電源装置331,332を備える。電線32は、電線321,322を含む。電源装置331,332は、駆動装置31のモータ311,312に電線321,322を介してそれぞれ接続され、電線321,322によって電流I31,I32を駆動装置31のモータ311,312にそれぞれ供給する。以下では、電流I31,I32を区別しない場合には、単に、電流I30ということがある。
The control device 33 controls the drive device 31. The control device 33 is connected to the drive device 31 via the electric wire 32, and supplies the current I30 to the drive device 31 via the electric wire 32. More specifically, the control device 33 includes power supply devices 331 and 332. The electric wire 32 includes electric wires 321 and 322. The power supply devices 331 and 332 are connected to the motors 31 and 312 of the drive device 31 via electric wires 321 and 322, respectively, and the currents I31 and I32 are supplied to the motors 31 and 312 of the drive device 31 by the electric wires 321 and 322, respectively. In the following, when the currents I31 and I32 are not distinguished, they may be simply referred to as the current I30.
特に、電源装置331,332は、機構部34で撹拌対象物40を撹拌するために、駆動装置31のモータ311,312に電流I31,I32をそれぞれ供給する。つまり、電流I31,I32は、撹拌器30が撹拌対象物40を撹拌している状態で駆動装置31に供給される。本実施形態では、モータ311,312は交流モータであるので、電流I31,I32は基準周波数を有する交流である。電源装置331,332は、電流I31,I32の基準周波数を調整する。
In particular, the power supply devices 331 and 332 supply the currents I31 and I32 to the motors 31 and 312 of the drive device 31 in order to stir the stirring object 40 by the mechanism unit 34, respectively. That is, the currents I31 and I32 are supplied to the drive device 31 in a state where the stirrer 30 is stirring the stirring object 40. In the present embodiment, since the motors 311, 312 are AC motors, the currents I31 and I32 are ACs having a reference frequency. The power supply devices 331 and 332 adjust the reference frequencies of the currents I31 and I32.
1.2.2 判定システム
判定システム10は、撹拌対象物40の状態として、撹拌対象物40の粘度を判定する。つまり、判定システム10は、粘度測定システムとしての機能を有する。判定システム10は、図1に示すように、測定部20を備える。また、判定システム10は、取得部11と、抽出部12と、判定部13と、出力部14と、収集部15と、生成部16と、記憶部17と、を備える。 1.2.2 Judgment system Thejudgment system 10 determines the viscosity of the stirring target 40 as the state of the stirring target 40. That is, the determination system 10 has a function as a viscosity measurement system. As shown in FIG. 1, the determination system 10 includes a measurement unit 20. Further, the determination system 10 includes an acquisition unit 11, an extraction unit 12, a determination unit 13, an output unit 14, a collection unit 15, a generation unit 16, and a storage unit 17.
判定システム10は、撹拌対象物40の状態として、撹拌対象物40の粘度を判定する。つまり、判定システム10は、粘度測定システムとしての機能を有する。判定システム10は、図1に示すように、測定部20を備える。また、判定システム10は、取得部11と、抽出部12と、判定部13と、出力部14と、収集部15と、生成部16と、記憶部17と、を備える。 1.2.2 Judgment system The
測定部20は、撹拌器30の駆動装置31に供給される電流I30を測定し、電流I30に関する波形を示す波形データ(電流波形データ)を出力する。測定部20は、制御装置33から駆動装置31への電流I30が流れる電線32に取り付けられる。測定部20は、電流センサを含む。本実施形態では、測定部20は、微分型の電流センサを含む。したがって、波形データは、電流I30の微分の波形を示すデータである。この種の微分型の電流センサとしては、カレントトランス及びサーチコイルが挙げられる。この種の微分型の電流センサを用いることで、測定部20を、電線32に後付けすることが可能になる。
The measuring unit 20 measures the current I30 supplied to the driving device 31 of the stirrer 30 and outputs waveform data (current waveform data) showing a waveform related to the current I30. The measuring unit 20 is attached to an electric wire 32 through which the current I30 from the control device 33 to the driving device 31 flows. The measuring unit 20 includes a current sensor. In the present embodiment, the measuring unit 20 includes a differential type current sensor. Therefore, the waveform data is data showing a differential waveform of the current I30. Examples of this type of differential current sensor include a current transformer and a search coil. By using this kind of differential type current sensor, the measuring unit 20 can be retrofitted to the electric wire 32.
判定システム10では、測定部20を駆動装置31の特にモータ311,312のロータ311a,312aの近傍に設置する必要がない。測定部20は、駆動装置31に供給される電流I30を測定できればよいから、制御装置33を収納する制御盤等の内部に設置できる。よって、機構部34において、測定部20の設置のための装置や、配線の引き回しが不要であり、また、測定部20の設置に起因する機構部34のバランス調整等の必要がなくなる。更に、そのため、測定部20の設置にあたって、撹拌対象物40の撹拌中に測定部20を使用できるようにするための対策(例えば、耐油対策、耐熱対策、防水対策等)が必要ない。よって、測定部20のメンテナンスの負担を軽減可能である。また、撹拌器30が作業中すなわち撹拌対象物40を撹拌している状態でも、波形データを取得できる。したがって、判定システム10での判定のために、撹拌器30の作業を中断する必要がなく、よって、判定による撹拌作業の長期化が低減され得る。更に、撹拌器30の作業中でも、波形データの取得が可能であることから、撹拌対象物40の状態を随時把握できる。
In the determination system 10, it is not necessary to install the measuring unit 20 in the vicinity of the rotors 311a and 312a of the drive device 31, especially the motors 311, 312. Since the measuring unit 20 only needs to be able to measure the current I30 supplied to the driving device 31, it can be installed inside a control panel or the like that houses the control device 33. Therefore, in the mechanism unit 34, there is no need for a device for installing the measurement unit 20 and wiring, and there is no need for balance adjustment of the mechanism unit 34 due to the installation of the measurement unit 20. Further, for this reason, when installing the measuring unit 20, it is not necessary to take measures (for example, oil resistance measures, heat resistance measures, waterproof measures, etc.) so that the measuring unit 20 can be used while stirring the stirring object 40. Therefore, the maintenance burden of the measuring unit 20 can be reduced. Further, the waveform data can be acquired even when the stirrer 30 is working, that is, the stirring target 40 is being stirred. Therefore, it is not necessary to interrupt the work of the stirrer 30 for the judgment by the judgment system 10, and therefore, the lengthening of the stirring work due to the judgment can be reduced. Further, since the waveform data can be acquired even during the work of the agitator 30, the state of the agitated object 40 can be grasped at any time.
図3及び図4は、撹拌器30の駆動装置31に供給される電流I30の時間軸波形を示す。時間軸波形は時間に対する電流の値を示す。図3は、撹拌対象物40の撹拌の開始直後の電流I30の波形を示す。図4は、撹拌対象物40の撹拌の開始から十分に時間が経過した後の電流I30の波形を示す。ただし、図3及び図4は、実際の波形ではなく仮想的な波形である。
3 and 4 show time-axis waveforms of the current I30 supplied to the drive device 31 of the stirrer 30. The time axis waveform shows the value of the current with respect to time. FIG. 3 shows the waveform of the current I30 immediately after the start of stirring the stirring object 40. FIG. 4 shows the waveform of the current I30 after a sufficient time has elapsed from the start of stirring the stirring object 40. However, FIGS. 3 and 4 are virtual waveforms rather than actual waveforms.
図5及び図6は、撹拌器30の駆動装置31に供給される電流I30の周波数成分を示す周波数軸波形を示す。周波数軸波形は、周波数に対する電流の成分の値を示す。図5は、図3の電流I30の周波数成分、つまり、撹拌対象物40の撹拌の開始直後の電流I30の周波数成分を示す。ここでは、基準周波数f0でのピークW1と、基準周波数f0の側帯波のピークW2,W3が見られる。一方、図6は、図4の電流I30の周波数成分、つまり、撹拌対象物40の撹拌の開始から十分に時間が経過した後の電流I30の周波数成分を示す。ここでは、基準周波数f0のピークW1のみが見られ、基準周波数f0に対する側帯波に対応するピークW2,W3が見られない。
5 and 6 show frequency axis waveforms showing the frequency components of the current I30 supplied to the drive device 31 of the stirrer 30. The frequency axis waveform shows the value of the current component with respect to the frequency. FIG. 5 shows the frequency component of the current I30 of FIG. 3, that is, the frequency component of the current I30 immediately after the start of stirring the stirring object 40. Here, the peak W1 at the reference frequency f0 and the peaks W2 and W3 of the sideband wave at the reference frequency f0 can be seen. On the other hand, FIG. 6 shows the frequency component of the current I30 of FIG. 4, that is, the frequency component of the current I30 after a sufficient time has elapsed from the start of stirring the stirring object 40. Here, only the peak W1 of the reference frequency f0 is seen, and the peaks W2 and W3 corresponding to the sideband waves with respect to the reference frequency f0 are not seen.
図7は、電流I30の周波数成分の分布範囲の時間変化を示す。図7から明らかなように、電流I30の周波数成分の範囲Wfは、基準周波数f0を中心と分布しており、時間の経過とともに基準周波数f0に収束する。そして、撹拌対象物40が均一に混ざるほど柔らかくなる場合には、撹拌の開始から時間が経過するにつれて、撹拌対象物40の粘度は低下する。逆に、撹拌対象物40が均一に混ざるほど固くなる場合には、撹拌の開始から時間が経過するにつれて、撹拌対象物40の粘度は増加する。そのため、電流I30の周波数成分の分布範囲の変化と撹拌対象物40の状態(例えば粘度)とは相関があると考えられる。そして、電流I30の周波数成分の分布範囲Wfの変化は、駆動装置31にかかる力すなわちモータ311,312のロータ311a,312aにかかる力の特定方向の成分に起因する。撹拌対象物40が均一に混ざっていない場合には、回転体341,342がスムーズに回転しにくく、回転体341,342の回転方向において不規則な力が回転体341,342にかかる。以上の点から、撹拌器30で撹拌される撹拌対象物40の状態と、駆動装置31にかかる力の特定方向の成分に起因する変化とには相関がある。判定システム10では、撹拌器30で撹拌される撹拌対象物40の状態と、駆動装置31にかかる力の特定方向の成分に起因する変化との相関を利用して、撹拌対象物40の状態を判定する。なお、上記の特定方向は、撹拌器30の構成に依存する。例えば、撹拌器30が、モータ311,312のロータ311a,312aの回転軸311ax、312axに対して、どのような方向の力を撹拌対象物40に作用させるかによって、上記の特定方向は変わり得る。例えば、撹拌器30が撹拌対象物40に対してモータ311によって直線的な押圧力をかける場合には、上記の特定方向は、モータ311のロータ311aの回転軸に交差する方向である。
FIG. 7 shows the time change of the distribution range of the frequency component of the current I30. As is clear from FIG. 7, the range Wf of the frequency component of the current I30 is distributed around the reference frequency f0, and converges to the reference frequency f0 with the passage of time. When the stirring target 40 becomes soft enough to be uniformly mixed, the viscosity of the stirring target 40 decreases as time elapses from the start of stirring. On the contrary, when the stirring target 40 becomes hard enough to be uniformly mixed, the viscosity of the stirring target 40 increases as time elapses from the start of stirring. Therefore, it is considered that there is a correlation between the change in the distribution range of the frequency component of the current I30 and the state (for example, viscosity) of the agitated object 40. The change in the distribution range Wf of the frequency component of the current I30 is caused by the component of the force applied to the drive device 31, that is, the force applied to the rotors 311a and 312a of the motors 311, 312 in a specific direction. When the objects to be agitated 40 are not uniformly mixed, the rotating bodies 341 and 342 are difficult to rotate smoothly, and irregular forces are applied to the rotating bodies 341 and 342 in the rotation direction of the rotating bodies 341 and 342. From the above points, there is a correlation between the state of the agitated object 40 agitated by the agitator 30 and the change caused by the component of the force applied to the drive device 31 in a specific direction. In the determination system 10, the state of the agitated object 40 to be agitated by the stirrer 30 is determined by utilizing the correlation between the state of the agitated object 40 and the change caused by the component of the force applied to the drive device 31 in a specific direction. judge. The specific direction described above depends on the configuration of the stirrer 30. For example, the specific direction may change depending on the direction in which the stirrer 30 exerts a force on the stirring object 40 with respect to the rotating shafts 311ax and 312ax of the rotors 311a and 312a of the motors 311, 312. .. For example, when the stirrer 30 applies a linear pressing force to the agitated object 40 by the motor 311, the specific direction described above is a direction intersecting the rotation axis of the rotor 311a of the motor 311.
取得部11は、撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データ(電流波形データ)を取得する。より詳細には、取得部11は、測定部20に接続されており、測定部20から波形データを取得する。測定部20からの波形データは、電流I30を時間で微分して得られた波形を示すデータである。取得部11は、撹拌器30の駆動装置31のモータ311,312に供給される電流I31,I32に関する波形を示す波形データ(電流波形データ)を取得する。
The acquisition unit 11 acquires waveform data (current waveform data) showing a waveform related to the current I30 supplied to the drive device 31 of the stirrer 30. More specifically, the acquisition unit 11 is connected to the measurement unit 20 and acquires waveform data from the measurement unit 20. The waveform data from the measuring unit 20 is data showing a waveform obtained by differentiating the current I30 with respect to time. The acquisition unit 11 acquires waveform data (current waveform data) showing waveforms related to the currents I31 and I32 supplied to the motors 31 and 312 of the drive device 31 of the stirrer 30.
抽出部12は、取得部11で取得された波形データから、判定部13で利用する情報を取得する。判定部13で利用する情報は、駆動装置31にかかる力の特定方向の成分に起因する変化に関する情報である。抽出部12は、取得部11で取得された波形データが示す時間軸波形(図3及び図4参照)を周波数軸波形(図5及び図6参照)に変換する。時間軸波形は周波数軸波形へ、一例として、高速フーリエ変換(FFT)で変換できる。抽出部12は、変換によって得られた周波数軸波形から、駆動装置31にかかる力の特定方向の成分に起因する変化を含み得る着目部分を抽出する。
The extraction unit 12 acquires the information used by the determination unit 13 from the waveform data acquired by the acquisition unit 11. The information used by the determination unit 13 is information regarding a change caused by a component of the force applied to the drive device 31 in a specific direction. The extraction unit 12 converts the time-axis waveform (see FIGS. 3 and 4) indicated by the waveform data acquired by the acquisition unit 11 into a frequency-axis waveform (see FIGS. 5 and 6). The time axis waveform can be converted into a frequency axis waveform by, for example, a fast Fourier transform (FFT). The extraction unit 12 extracts from the frequency axis waveform obtained by the conversion a portion of interest that may include a change due to a component of the force applied to the driving device 31 in a specific direction.
図7に示すように、電流I30の周波数成分の分布範囲Wfは、基準周波数f0を中心に広がり、時間の経過とともに基準周波数f0に収束する。電流I30の周波数成分は、基準周波数f0及び側帯波を含んでおり、撹拌対象物40の状態の変化は、基準周波数f0よりも側帯波の変化に影響し得る。よって、抽出部12は、周波数軸波形から、着目部分として側帯波に対応する部分を抽出してよい。
As shown in FIG. 7, the distribution range Wf of the frequency component of the current I30 spreads around the reference frequency f0 and converges to the reference frequency f0 with the passage of time. The frequency component of the current I30 includes the reference frequency f0 and the sideband wave, and the change in the state of the stirring object 40 may affect the change in the sideband wave more than the reference frequency f0. Therefore, the extraction unit 12 may extract a portion corresponding to the sideband wave as a portion of interest from the frequency axis waveform.
判定部13は、駆動装置31にかかる力の特定方向の成分に起因する変化から撹拌器30で撹拌される撹拌対象物40の状態を判定する。本実施形態では、判定部13は、抽出部12で抽出された着目部分に基づいて、撹拌対象物40の状態を判定する。本実施形態では、判定部13は、撹拌対象物40の状態として撹拌対象物40の粘度を判定する。
The determination unit 13 determines the state of the agitated object 40 to be agitated by the agitator 30 from the change caused by the component of the force applied to the drive device 31 in the specific direction. In the present embodiment, the determination unit 13 determines the state of the stirring object 40 based on the portion of interest extracted by the extraction unit 12. In the present embodiment, the determination unit 13 determines the viscosity of the stirring target 40 as the state of the stirring target 40.
判定部13は、学習済みモデルM11を利用して、撹拌対象物40の状態を判定する。学習済みモデルM11は、与えられた入力(着目部分)に対して、撹拌対象物40の状態を示す値(状態値)を出力するように設計されている。判定部13は、抽出部12から得た着目部分を学習済みモデルM11に与え、これによって学習済みモデルM11から得られた状態値に基づいて、撹拌対象物40の状態を判定する。例えば、状態値は粘度に対応していてよく、この場合、判定部13は、学習済みモデルM11から得られた状態値から、撹拌器30の粘度(現在の粘度)を求めることができる。このような学習済みモデルM11は、状態値に対応するラベルと着目部分との関係を規定する学習用データ(データセット)を用いた教師あり学習により生成することができる。学習済みモデルM11は、記憶部17に記憶されている。なお、記憶部17は、モータ311,312の種類毎に、学習済みモデルM11を記憶してよい。つまり、判定部13は、モータ311,312それぞれに対して異なる学習済みモデルM11を利用してよい。
The determination unit 13 determines the state of the stirring object 40 by using the learned model M11. The trained model M11 is designed to output a value (state value) indicating the state of the stirring object 40 for a given input (part of interest). The determination unit 13 gives the portion of interest obtained from the extraction unit 12 to the trained model M11, and determines the state of the stirring object 40 based on the state value obtained from the trained model M11. For example, the state value may correspond to the viscosity, and in this case, the determination unit 13 can obtain the viscosity (current viscosity) of the stirrer 30 from the state value obtained from the trained model M11. Such a trained model M11 can be generated by supervised learning using learning data (data set) that defines the relationship between the label corresponding to the state value and the portion of interest. The trained model M11 is stored in the storage unit 17. The storage unit 17 may store the learned model M11 for each type of motors 311, 312. That is, the determination unit 13 may use different trained models M11 for each of the motors 311, 312.
このように、判定部13は、撹拌対象物40の状態を判定することができる。特に、撹拌対象物40が均一に混ざるほど柔らかくなる場合には、判定部13は、撹拌対象物40が所定の柔らかさを有しているか否かを判定することができる。これによって、撹拌対象物40の柔らかさを所定の柔らかさに調整する作業が容易に行えるようになる。逆に、撹拌対象物40が均一に混ざるほど固くなる場合には、判定部13は、撹拌対象物40が所定の固さを有しているか否かを判定することができる。これによって、撹拌対象物40の固さを所定の固さに調整する作業が容易に行えるようになる。
In this way, the determination unit 13 can determine the state of the stirring object 40. In particular, when the stirring target object 40 becomes soft enough to be uniformly mixed, the determination unit 13 can determine whether or not the stirring target object 40 has a predetermined softness. As a result, the work of adjusting the softness of the stirring object 40 to a predetermined softness can be easily performed. On the contrary, when the stirring target 40 becomes hard enough to be uniformly mixed, the determination unit 13 can determine whether or not the stirring target 40 has a predetermined hardness. As a result, the work of adjusting the hardness of the agitated object 40 to a predetermined hardness can be easily performed.
本実施形態では、取得部11によって、2種類の電流I31,I32の波形データが得られる。そのため、2種類の電流I31,I32の波形データそれぞれから、撹拌対象物40の状態が得られる。判定部13は、2種類の電流I31,I32の波形データにそれぞれ対応する撹拌対象物40の状態から、最終的な撹拌対象物40の状態を決定してよい。例えば、電流I31,I32にそれぞれ対応する撹拌対象物40の粘度の代表値を、最終的な撹拌対象物40の粘度としてよい。代表値は、平均値、最大値、最小値、最頻値等から適宜選択され得る。
In the present embodiment, the acquisition unit 11 obtains waveform data of two types of currents I31 and I32. Therefore, the state of the agitated object 40 can be obtained from each of the waveform data of the two types of currents I31 and I32. The determination unit 13 may determine the final state of the stirring object 40 from the state of the stirring target 40 corresponding to the waveform data of the two types of currents I31 and I32, respectively. For example, a representative value of the viscosity of the stirring object 40 corresponding to the currents I31 and I32 may be used as the final viscosity of the stirring object 40. The representative value can be appropriately selected from an average value, a maximum value, a minimum value, a mode value, and the like.
出力部14は、判定部13での判定の結果を出力する。出力部14は、例えば、音声出力装置と、ディスプレイと、を有する。ディスプレイは、例えば、液晶ディスプレイや有機ELディスプレイなどの薄型のディスプレイ装置である。出力部14は、判定部13での判定の結果をディスプレイに表示したり、音声出力装置で報知したりしてもよい。また、出力部14は、判定部13での判定の結果をデータとして外部装置に送信したり、蓄積したりしてもよい。なお、出力部14は、音声出力装置とディスプレイとの両方を有する必要はない。また、出力部14は、判定部13での判定の結果を電子メール等で出力することもできる。
The output unit 14 outputs the result of the determination by the determination unit 13. The output unit 14 includes, for example, an audio output device and a display. The display is, for example, a thin display device such as a liquid crystal display or an organic EL display. The output unit 14 may display the result of the determination by the determination unit 13 on the display or notify the result by the voice output device. Further, the output unit 14 may transmit or store the result of the determination by the determination unit 13 as data to the external device. The output unit 14 does not need to have both an audio output device and a display. Further, the output unit 14 can also output the result of the determination by the determination unit 13 by e-mail or the like.
収集部15は、取得部11で取得されたデータを収集して蓄積する。本実施形態では、取得部11で取得されたデータは、測定部20からの波形データを含む。収集部15が収集したデータは、学習済みモデルM11の生成・改良に利用される。
The collection unit 15 collects and accumulates the data acquired by the acquisition unit 11. In the present embodiment, the data acquired by the acquisition unit 11 includes the waveform data from the measurement unit 20. The data collected by the collecting unit 15 is used for generating and improving the trained model M11.
生成部16は、判定部13が利用する学習済みモデルM11を生成する。生成部16は、一定量以上の学習用データを用いて、機械学習アルゴリズムによって学習済みモデルM11を生成する。学習用データは、予め用意されていてもよいし、収集部15が蓄積したデータから生成されてもよい。収集部15が蓄積したデータから生成された学習用データを採用することで、学習済みモデルM11を用いた状態判定の精度の更なる向上が見込める。生成部16は、新しく生成した学習済みモデルM11を評価し、学習済みモデルM11の評価が向上すると、記憶部17に記憶されている学習済みモデルM11を新しく生成した学習済みモデルM11に置き換えて、学習済みモデルM11を更新する。学習済みモデルM11の生成の方法としては、上述したように、教師あり学習を適宜利用できる。教師あり学習としては、代表的な、教師あり学習機構を有する多層ニューラルネットワークを利用できる。
The generation unit 16 generates the trained model M11 used by the determination unit 13. The generation unit 16 generates a trained model M11 by a machine learning algorithm using a certain amount or more of training data. The learning data may be prepared in advance, or may be generated from the data accumulated by the collecting unit 15. By adopting the learning data generated from the data accumulated by the collecting unit 15, it is expected that the accuracy of the state determination using the trained model M11 will be further improved. The generation unit 16 evaluates the newly generated trained model M11, and when the evaluation of the trained model M11 improves, the trained model M11 stored in the storage unit 17 is replaced with the newly generated trained model M11. The trained model M11 is updated. As a method of generating the trained model M11, supervised learning can be appropriately used as described above. As supervised learning, a typical multi-layer neural network having a supervised learning mechanism can be used.
判定システム10において、取得部11と、抽出部12と、判定部13と、出力部14と、収集部15と、生成部16とは、例えば、1以上のプロセッサ(一例としてはマイクロプロセッサ)と1以上のメモリとを含むコンピュータシステムにより実現され得る。つまり、1以上のプロセッサが1以上のメモリに記憶された1以上のプログラムを実行することで、取得部11と、抽出部12と、判定部13と、出力部14と、収集部15と、生成部16として機能する。1以上のプログラムは、メモリに予め記録されていてもよいし、インターネット等の電気通信回線を通じて、又はメモリカード等の非一時的な記録媒体に記録されて提供されてもよい。
In the determination system 10, the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, and the generation unit 16 are, for example, one or more processors (for example, a microprocessor). It can be realized by a computer system including one or more memories. That is, when one or more processors execute one or more programs stored in one or more memories, the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, and so on. It functions as a generator 16. The one or more programs may be recorded in advance in a memory, may be recorded through a telecommunication line such as the Internet, or may be recorded and provided on a non-temporary recording medium such as a memory card.
1.3 動作
次に、図5を参照して判定システム10の基本的な動作について簡単に説明する。以下では、説明を簡略化するために、撹拌器30の機構部34に関する診断について説明する。 1.3 Operation Next, the basic operation of thedetermination system 10 will be briefly described with reference to FIG. In the following, for simplification of the description, the diagnosis regarding the mechanical unit 34 of the stirrer 30 will be described.
次に、図5を参照して判定システム10の基本的な動作について簡単に説明する。以下では、説明を簡略化するために、撹拌器30の機構部34に関する診断について説明する。 1.3 Operation Next, the basic operation of the
取得部11は、撹拌器30の駆動装置31のモータ311,312に供給される電流I31,I32に関する波形を示す波形データ(電流波形データ)を取得する(ステップS11)。次に、抽出部12は、取得部11で取得された波形データが示す波形を周波数軸波形に変換し、周波数軸波形から、駆動装置31の特にモータ311、312のロータ311a,312aにかかる力の特定方向の成分に起因する変化を含む部分を抽出する(ステップS12)。その後、判定部13は、複数の学習済みモデルM11を用いて、抽出部12で抽出された着目部分から、撹拌対象物40の状態を判定する(ステップS13)。最後に、出力部14は、判定部13での判定の結果を出力する(S14)。このように、判定システム10は、駆動装置31に供給される電流I31,I32に関する波形を示す波形データから、撹拌器30で撹拌される撹拌対象物40の状態を判定してその結果を提示できる。
The acquisition unit 11 acquires waveform data (current waveform data) showing waveforms related to the currents I31 and I32 supplied to the motors 31 and 312 of the drive device 31 of the stirrer 30 (step S11). Next, the extraction unit 12 converts the waveform indicated by the waveform data acquired by the acquisition unit 11 into a frequency axis waveform, and the force applied to the rotors 311a and 312a of the drive device 31, particularly the motors 311 and 312, from the frequency axis waveform. A portion containing a change due to a component in a specific direction of is extracted (step S12). After that, the determination unit 13 determines the state of the stirring object 40 from the portion of interest extracted by the extraction unit 12 using the plurality of trained models M11 (step S13). Finally, the output unit 14 outputs the result of the determination by the determination unit 13 (S14). In this way, the determination system 10 can determine the state of the agitated object 40 to be agitated by the agitator 30 from the waveform data showing the waveforms related to the currents I31 and I32 supplied to the drive device 31, and present the result. ..
1.4 適用例
図9は、判定システム10を利用した撹拌器30の制御の一例を示す。図9では、判定システム10は、撹拌対象物40の状態として粘度を判定する。図9は、判定システム10で判定した撹拌対象物40の状態(粘度)の履歴(時間変化)に基づいて、撹拌対象物40の粘度が目標値V11となる撹拌器30の制御の条件を決定する。例えば、時刻t12までに得られた撹拌対象物40の状態(粘度)の履歴(時間変化)から、時刻t12以後の撹拌対象物40の状態(粘度)の予測値を得る。なお、図9は、時刻t12までは撹拌対象物40の粘度の実測値(判定システム10での判定した粘度の値)を示し、時刻t12以後は撹拌対象物40の粘度の予測値を示す。撹拌対象物40の粘度の予測値と、撹拌対象物40の粘度の実測値との差を考慮して、撹拌器30の制御の条件を決定する。なお、撹拌器30の制御の条件は、撹拌対象物40の温度及び撹拌期間を含み得る。例えば、撹拌対象物40の温度を変化させることで、撹拌期間(撹拌終了時刻t11)を変えずに、粘度が目標値V11となった撹拌対象物40を得ることが可能である。 1.4 Application example FIG. 9 shows an example of control of thestirrer 30 using the determination system 10. In FIG. 9, the determination system 10 determines the viscosity as the state of the agitated object 40. FIG. 9 determines the control conditions of the stirrer 30 in which the viscosity of the stirring object 40 becomes the target value V11 based on the history (time change) of the state (viscosity) of the stirring object 40 determined by the determination system 10. To do. For example, a predicted value of the state (viscosity) of the stirring object 40 after the time t12 is obtained from the history (time change) of the state (viscosity) of the stirring object 40 obtained by the time t12. Note that FIG. 9 shows the measured value of the viscosity of the stirring object 40 (the value of the viscosity determined by the determination system 10) until the time t12, and shows the predicted value of the viscosity of the stirring object 40 after the time t12. The control conditions of the stirrer 30 are determined in consideration of the difference between the predicted value of the viscosity of the agitated object 40 and the measured value of the viscosity of the agitated object 40. The control conditions of the stirrer 30 may include the temperature of the agitated object 40 and the stirring period. For example, by changing the temperature of the stirring object 40, it is possible to obtain the stirring target 40 having a viscosity of the target value V11 without changing the stirring period (stirring end time t11).
図9は、判定システム10を利用した撹拌器30の制御の一例を示す。図9では、判定システム10は、撹拌対象物40の状態として粘度を判定する。図9は、判定システム10で判定した撹拌対象物40の状態(粘度)の履歴(時間変化)に基づいて、撹拌対象物40の粘度が目標値V11となる撹拌器30の制御の条件を決定する。例えば、時刻t12までに得られた撹拌対象物40の状態(粘度)の履歴(時間変化)から、時刻t12以後の撹拌対象物40の状態(粘度)の予測値を得る。なお、図9は、時刻t12までは撹拌対象物40の粘度の実測値(判定システム10での判定した粘度の値)を示し、時刻t12以後は撹拌対象物40の粘度の予測値を示す。撹拌対象物40の粘度の予測値と、撹拌対象物40の粘度の実測値との差を考慮して、撹拌器30の制御の条件を決定する。なお、撹拌器30の制御の条件は、撹拌対象物40の温度及び撹拌期間を含み得る。例えば、撹拌対象物40の温度を変化させることで、撹拌期間(撹拌終了時刻t11)を変えずに、粘度が目標値V11となった撹拌対象物40を得ることが可能である。 1.4 Application example FIG. 9 shows an example of control of the
図10は、判定システム10を利用した、撹拌器30の制御の他例を示す。図10では、図9と同様に、判定システム10は、撹拌対象物40の状態として粘度を判定する。図10は、判定システム10で判定した撹拌対象物40の状態に基づいて撹拌器30での撹拌期間を調整する例を示す。判定システム10は、撹拌対象物40の粘度を判定する。判定システム10で判定された撹拌対象物40の粘度の値と目標値V21との差が0になるまで、撹拌器30での撹拌を継続する。つまり、撹拌対象物40の粘度が目標値V21となるまで、撹拌器30での撹拌を継続する。例えば、時刻t21において、判定システム10を用いて撹拌対象物40の粘度を判定し、このときの撹拌対象物40の粘度の値V22が目標値V21と異なれば、撹拌器30での撹拌を継続する。そして、時刻t22では、判定システム10で判定された撹拌対象物40の粘度の値が目標値V21に一致しているので、撹拌器30での撹拌を終了する。これによって、撹拌の終了時には、粘度が目標値V21となった撹拌対象物40を得ることが可能である。
FIG. 10 shows another example of control of the stirrer 30 using the determination system 10. In FIG. 10, similarly to FIG. 9, the determination system 10 determines the viscosity as the state of the agitated object 40. FIG. 10 shows an example of adjusting the stirring period in the stirrer 30 based on the state of the stirring target 40 determined by the determination system 10. The determination system 10 determines the viscosity of the agitated object 40. Stirring with the stirrer 30 is continued until the difference between the viscosity value of the stirring object 40 determined by the determination system 10 and the target value V21 becomes zero. That is, the stirring by the stirrer 30 is continued until the viscosity of the stirring object 40 reaches the target value V21. For example, at time t21, the viscosity of the stirring object 40 is determined using the determination system 10, and if the viscosity value V22 of the stirring object 40 at this time is different from the target value V21, stirring by the stirrer 30 is continued. To do. Then, at time t22, since the value of the viscosity of the stirring object 40 determined by the determination system 10 matches the target value V21, the stirring by the stirrer 30 is terminated. As a result, at the end of stirring, it is possible to obtain the stirring object 40 having a viscosity of the target value V21.
このように判定システム10を利用することで、撹拌対象物40の状態を所望の状態に容易に調整できる。そのため、熟練の作業者の感等に頼らなくて済むようになり、撹拌対象物40の状態のばらつきの抑制が可能である。
By using the determination system 10 in this way, the state of the stirring object 40 can be easily adjusted to a desired state. Therefore, it is not necessary to rely on the feeling of a skilled worker or the like, and it is possible to suppress variations in the state of the agitated object 40.
1.5 まとめ
以上述べた判定システム10は、取得部11と、判定部13とを備える。取得部11は、撹拌対象物40を撹拌する撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データを取得する。判定部13は、波形データから得られる、駆動装置31にかかる力の特定方向の成分に起因する変化から、撹拌対象物40の状態に関する判定を行う。このような判定システム10によれば、撹拌対象物40の状態の判定の精度を向上できる。 1.5 Summary Thedetermination system 10 described above includes an acquisition unit 11 and a determination unit 13. The acquisition unit 11 acquires waveform data showing a waveform related to the current I30 supplied to the driving device 31 of the agitator 30 that agitates the agitated object 40. The determination unit 13 determines the state of the stirring object 40 from the change caused by the component of the force applied to the driving device 31 in the specific direction obtained from the waveform data. According to such a determination system 10, the accuracy of determining the state of the stirring object 40 can be improved.
以上述べた判定システム10は、取得部11と、判定部13とを備える。取得部11は、撹拌対象物40を撹拌する撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データを取得する。判定部13は、波形データから得られる、駆動装置31にかかる力の特定方向の成分に起因する変化から、撹拌対象物40の状態に関する判定を行う。このような判定システム10によれば、撹拌対象物40の状態の判定の精度を向上できる。 1.5 Summary The
換言すれば、判定システム10は、下記の判定方法を実行しているといえる。判定方法は、取得ステップと、判定ステップとを備える。取得ステップは、撹拌対象物40を撹拌する撹拌器30の駆動装置31に供給される電流I30に関する波形を示す波形データを取得するステップである。判定ステップは、波形データから得られる、駆動装置31にかかる力の特定方向の成分に起因する変化から、撹拌対象物40の状態に関する判定を行うステップである。このような判定方法によれば、撹拌対象物40の状態の判定の精度を向上できる。
In other words, it can be said that the determination system 10 executes the following determination method. The determination method includes an acquisition step and a determination step. The acquisition step is a step of acquiring waveform data showing a waveform related to the current I30 supplied to the drive device 31 of the stirrer 30 that stirs the stirring object 40. The determination step is a step of determining the state of the stirring object 40 from the change caused by the component of the force applied to the driving device 31 in the specific direction obtained from the waveform data. According to such a determination method, the accuracy of determining the state of the stirring object 40 can be improved.
判定システム10は、1以上のプロセッサを含むコンピュータシステムにより実現されている。つまり、判定システム10は、1以上のプロセッサがプログラム(判定プログラム)を実行することにより実現される。このプログラムは、1以上のプロセッサに判定方法を実行させるためのプログラム(コンピュータプログラム)である。このようなプログラムによれば、判定方法と同様に、撹拌対象物40の状態の判定の精度を向上できる。
The judgment system 10 is realized by a computer system including one or more processors. That is, the determination system 10 is realized by executing a program (determination program) by one or more processors. This program is a program (computer program) for causing one or more processors to execute the determination method. According to such a program, the accuracy of determining the state of the agitated object 40 can be improved as in the determination method.
2.変形例
本開示の実施形態は、上記実施形態に限定されない。上記実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。以下に、上記実施形態の変形例を列挙する。 2. 2. Modifications The embodiments of the present disclosure are not limited to the above embodiments. The above-described embodiment can be changed in various ways depending on the design and the like as long as the object of the present disclosure can be achieved. The modifications of the above embodiment are listed below.
本開示の実施形態は、上記実施形態に限定されない。上記実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。以下に、上記実施形態の変形例を列挙する。 2. 2. Modifications The embodiments of the present disclosure are not limited to the above embodiments. The above-described embodiment can be changed in various ways depending on the design and the like as long as the object of the present disclosure can be achieved. The modifications of the above embodiment are listed below.
一変形例では、取得部11は、必ずしも2種類の電流I31,I32の波形データを取得しなくてよい。例えば、取得部11は、モータ311,312の一方に供給される電流I30、つまり、電流I31,I32の一方の波形データだけを取得してよい。この場合、測定部20は、電流I31,I32の一方だけを測定すればよい。また、取得部11は、2より多い複数の電流の波形データを取得してもよい。
In one modification, the acquisition unit 11 does not necessarily have to acquire waveform data of two types of currents I31 and I32. For example, the acquisition unit 11 may acquire only the waveform data of the current I30 supplied to one of the motors 311, 312, that is, one of the currents I31 and I32. In this case, the measuring unit 20 needs to measure only one of the currents I31 and I32. Further, the acquisition unit 11 may acquire waveform data of a plurality of currents having more than two.
一変形例では、取得部11は、回転体341,342の回転数を変動させたときの波形データを取得してよい。このようにして、撹拌対象物40に積極的に変化を生じさせることで、駆動装置31に供給される電流I30に撹拌対象物40の状態の影響が反映される可能性がある。これによって、取得部11で取得される電流I30の波形データにおいて撹拌対象物40の状態に起因する変化が生じることが期待できる。したがって、撹拌対象物40の状態の判定の精度の更なる向上が図れる。
In one modification, the acquisition unit 11 may acquire waveform data when the rotation speeds of the rotating bodies 341 and 342 are changed. By positively causing the stirring object 40 to change in this way, the influence of the state of the stirring object 40 may be reflected in the current I30 supplied to the drive device 31. As a result, it can be expected that the waveform data of the current I30 acquired by the acquisition unit 11 will change due to the state of the stirring object 40. Therefore, the accuracy of determining the state of the stirring object 40 can be further improved.
一変形例では、取得部11は、撹拌対象物40に所定の処理を行ったときの波形データを取得してよい。所定の処理は、外部要因によって撹拌対象物40に積極的に変化を生じさせる処理である。所定の処理の例としては、撹拌対象物40の加熱、冷却、加圧、減圧等が挙げられる。このようにして、撹拌対象物40に積極的に変化を生じさせることで、駆動装置31に供給される電流I30に撹拌対象物40の状態の影響が反映される可能性がある。これによって、取得部11で取得される電流I30の波形データにおいて撹拌対象物40の状態に起因する変化が生じることが期待できる。したがって、撹拌対象物40の状態の判定の精度の更なる向上が図れる。
In one modification, the acquisition unit 11 may acquire waveform data when a predetermined process is performed on the stirring object 40. The predetermined treatment is a treatment that positively causes the stirring target 40 to be changed by an external factor. Examples of the predetermined treatment include heating, cooling, pressurizing, depressurizing, and the like of the stirring object 40. By positively causing the stirring object 40 to change in this way, the influence of the state of the stirring object 40 may be reflected in the current I30 supplied to the drive device 31. As a result, it can be expected that the waveform data of the current I30 acquired by the acquisition unit 11 will change due to the state of the stirring object 40. Therefore, the accuracy of determining the state of the stirring object 40 can be further improved.
撹拌対象物40の状態は、粘度に限らず、レイノルズ数、固形物(だま)の割合、撹拌の程度等の撹拌対象物40の状態を表す数値であってもよい。また、撹拌対象物40の状態は、数値に限定されず、正常、異常、及び、不特定状態等の事象であってもよい。つまり、撹拌対象物40の状態は、定量的な状態であってもよいし、定性的な状態であってもよい。
The state of the agitated object 40 is not limited to the viscosity, but may be a numerical value representing the state of the agitated object 40 such as the Reynolds number, the ratio of solid matter (dumb), and the degree of agitation. Further, the state of the stirring object 40 is not limited to a numerical value, and may be an event such as a normal state, an abnormal state, or an unspecified state. That is, the state of the stirring object 40 may be a quantitative state or a qualitative state.
例えば、判定システム10は、必ずしも、測定部20を備えている必要はない。一例として、測定部20が予め撹拌器30に備えられていれば、判定システム10は、取得部11、抽出部12、判定部13、出力部14、収集部15、生成部16、及び記憶部17を有しているだけでもよい。
For example, the determination system 10 does not necessarily have to include the measurement unit 20. As an example, if the measuring unit 20 is provided in the stirrer 30 in advance, the determination system 10 includes the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, the generation unit 16, and the storage unit. It may only have 17.
ここで、測定部20は、必ずしも、微分型の電流センサを含む必要はなく、その他の従来周知の電流センサであってもよい。
Here, the measuring unit 20 does not necessarily have to include a differential type current sensor, and may be another conventionally known current sensor.
また、判定システム10は、必ずしも、収集部15、生成部16、及び記憶部17を有している必要はない。つまり、判定システム10は、学習済みモデルM11を自身で更新する機能を有していなくてよい。また、記憶部17は、必ずしも複数の学習済みモデルM11を記憶している必要はない。
Further, the determination system 10 does not necessarily have to have the collection unit 15, the generation unit 16, and the storage unit 17. That is, the determination system 10 does not have to have a function of updating the trained model M11 by itself. Further, the storage unit 17 does not necessarily have to store a plurality of trained models M11.
また、抽出部12は、必須ではない。例えば、抽出部12での処理をユーザが代替して行う場合、判定システム10は、駆動装置31にかかる力の特定方向の成分に起因する変化を含む部分の抽出を行わなくてよい。また、取得部11で取得された波形データが示す波形の全体を入力として学習済みモデルM11から撹拌器30の状態を出力として得てよい。つまり、変化を含む部分の抽出を省略してよい。
Also, the extraction unit 12 is not essential. For example, when the user substitutes the processing in the extraction unit 12, the determination system 10 does not have to extract the portion including the change caused by the component of the force applied to the driving device 31 in the specific direction. Further, the state of the stirrer 30 may be obtained as an output from the trained model M11 by inputting the entire waveform indicated by the waveform data acquired by the acquisition unit 11. That is, the extraction of the portion including the change may be omitted.
また、判定システム10は、必ずしも、出力部14を有している必要はない。一例として、判定システム10は、判定部13で判定された撹拌対象物40の状態を、判定システム10外に出力可能であってよい。
Further, the determination system 10 does not necessarily have to have the output unit 14. As an example, the determination system 10 may be able to output the state of the stirring object 40 determined by the determination unit 13 to the outside of the determination system 10.
また、判定システム10は、複数のコンピュータにより構成されていてもよく、判定システム10の機能(特に、取得部11、抽出部12、判定部13、出力部14、収集部15、及び生成部16)は、複数の装置に分散されていてもよい。例えば、取得部11、抽出部12、判定部13及び出力部14は、機器のある施設に設置されるパーソナルコンピュータ等に設けられてよく、生成部16及び出力部14は、外部のサーバ等に設けられてよい。この場合、パーソナルコンピュータとサーバとが協働することで、判定システム10が実現される。更に、判定システム10の機能の少なくとも一部が、例えば、クラウド(クラウドコンピューティング)によって実現されていてもよい。
Further, the determination system 10 may be composed of a plurality of computers, and the functions of the determination system 10 (particularly, the acquisition unit 11, the extraction unit 12, the determination unit 13, the output unit 14, the collection unit 15, and the generation unit 16). ) May be distributed to a plurality of devices. For example, the acquisition unit 11, the extraction unit 12, the determination unit 13, and the output unit 14 may be provided in a personal computer or the like installed in a facility having equipment, and the generation unit 16 and the output unit 14 may be provided in an external server or the like. It may be provided. In this case, the determination system 10 is realized by the cooperation of the personal computer and the server. Further, at least a part of the functions of the determination system 10 may be realized by, for example, the cloud (cloud computing).
以上述べた判定システム10の実行主体は、コンピュータシステムを含んでいる。コンピュータシステムは、ハードウェアとしてのプロセッサ及びメモリを有する。コンピュータシステムのメモリに記録されたプログラムをプロセッサが実行することによって、本開示における判定システム10の実行主体としての機能が実現される。プログラムは、コンピュータシステムのメモリに予め記録されていてもよいが、電気通信回線を通じて提供されてもよい。また、プログラムは、コンピュータシステムで読み取り可能なメモリカード、光学ディスク、ハードディスクドライブ等の非一時的な記録媒体に記録されて提供されてもよい。コンピュータシステムのプロセッサは、半導体集積回路(IC)又は大規模集積回路(LSI)を含む1乃至複数の電子回路で構成される。ここでは、ICやLSIと呼んでいるが、集積の度合いによって呼び方が変わり、システムLSI、VLSI(verylarge scale integration)、若しくはULSI(ultralarge scale integration)と呼ばれるものであってもよい。LSIの製造後にプログラムされる、フィールド・プログラマブル・ゲート・アレイ(FGPA)、又はLSI内部の接合関係の再構成又はLSI内部の回路区画のセットアップができる再構成可能な論理デバイスも同じ目的で使うことができる。複数の電子回路は、1つのチップに集約されていてもよいし、複数のチップに分散して設けられていてもよい。複数のチップは、1つの装置に集約されていてもよいし、複数の装置に分散して設けられていてもよい。
The execution subject of the determination system 10 described above includes a computer system. A computer system has a processor and memory as hardware. When the processor executes the program recorded in the memory of the computer system, the function as the execution subject of the determination system 10 in the present disclosure is realized. The program may be pre-recorded in the memory of the computer system or may be provided through a telecommunication line. The program may also be provided recorded on a non-temporary recording medium such as a memory card, optical disk, or hard disk drive that can be read by a computer system. A processor in a computer system is composed of one or more electronic circuits including a semiconductor integrated circuit (IC) or a large scale integrated circuit (LSI). Although they are called ICs and LSIs here, they may be called system LSIs, VLSIs (very large scale integrations), or ULSIs (very large scale integrations), depending on the degree of integration. A field programmable gate array (FPPA) that is programmed after the LSI is manufactured, or a reconfigurable logical device that can reconfigure the junction relationships inside the LSI or set up circuit partitions inside the LSI should also be used for the same purpose. Can be done. A plurality of electronic circuits may be integrated on one chip, or may be distributed on a plurality of chips. The plurality of chips may be integrated in one device, or may be distributed in a plurality of devices.
3.態様
上記実施形態及び変形例から明らかなように、本開示は、下記の態様を含む。以下では、実施形態との対応関係を明示するためだけに、符号を括弧付きで付している。 3. 3. Aspects As will be clear from the above embodiments and modifications, the present disclosure includes the following aspects. In the following, reference numerals are given in parentheses only to clearly indicate the correspondence with the embodiments.
上記実施形態及び変形例から明らかなように、本開示は、下記の態様を含む。以下では、実施形態との対応関係を明示するためだけに、符号を括弧付きで付している。 3. 3. Aspects As will be clear from the above embodiments and modifications, the present disclosure includes the following aspects. In the following, reference numerals are given in parentheses only to clearly indicate the correspondence with the embodiments.
第1の態様は、判定システム(10)であって、取得部(11)と、判定部(13)とを備える。前記取得部(11)は、撹拌対象物(40)を撹拌する撹拌器(30)の駆動装置(31)に供給される電流(I30,I31,I32)に関する波形を示す波形データを取得する。前記判定部(13)は、前記波形データから得られる、前記駆動装置(31)にかかる力の特定方向の成分に起因する変化から、前記撹拌対象物(40)の状態を判定する。この態様によれば、撹拌対象物(40)の状態の判定の精度を向上できる。
The first aspect is a determination system (10), which includes an acquisition unit (11) and a determination unit (13). The acquisition unit (11) acquires waveform data showing waveforms related to currents (I30, I31, I32) supplied to the drive device (31) of the stirrer (30) that agitates the agitated object (40). The determination unit (13) determines the state of the stirring object (40) from the change caused by the component of the force applied to the driving device (31) in the specific direction obtained from the waveform data. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
第2の態様は、第1の態様に基づく判定システム(10)である。第2の態様では、前記電流(I30,I31,I32)は、前記撹拌対象物(40)の撹拌中に前記駆動装置(31)に供給される。この態様によれば、撹拌器(30)での撹拌を中断することなく、撹拌対象物(40)の状態を判定できる。
The second aspect is the determination system (10) based on the first aspect. In the second aspect, the currents (I30, I31, I32) are supplied to the driving device (31) during stirring of the stirring object (40). According to this aspect, the state of the agitated object (40) can be determined without interrupting the agitation in the agitator (30).
第3の態様は、第1又は第2の態様に基づく判定システム(10)である。第3の態様では、前記駆動装置(31)は、前記撹拌対象物(40)の撹拌のための回転体(341,342)を回転させるモータ(311,312)を含む。前記駆動装置(31)にかかる力は、前記モータ(311,312)のロータ(311a,312a)にかかる力である。この態様によれば、撹拌対象物(40)の状態の判定の精度を更に向上できる。
The third aspect is the determination system (10) based on the first or second aspect. In the third aspect, the driving device (31) includes a motor (311, 312) for rotating a rotating body (341, 342) for stirring the stirring object (40). The force applied to the drive device (31) is the force applied to the rotors (311a, 312a) of the motor (311, 312). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
第4の態様は、第3の態様に基づく判定システム(10)である。第4の態様では、前記駆動装置(31)は、複数の前記回転体(341,342)をそれぞれ独立して回転させる複数の前記モータ(311,312)を含む。この態様によれば、撹拌対象物(40)の状態の判定の精度を更に向上できる。
The fourth aspect is the determination system (10) based on the third aspect. In the fourth aspect, the driving device (31) includes a plurality of the motors (311 and 312) that independently rotate the plurality of rotating bodies (341 and 342). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
第5の態様は、第3又は第4の態様に基づく判定システム(10)である。第5の態様では、前記取得部(11)は、前記回転体(341,342)の回転数を変動させたときの前記波形データを取得する。この態様によれば、撹拌対象物(40)の状態の判定の精度の更なる向上が図れる。
The fifth aspect is the determination system (10) based on the third or fourth aspect. In the fifth aspect, the acquisition unit (11) acquires the waveform data when the rotation speed of the rotating body (341, 342) is changed. According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
第6の態様は、第1~第4の態様のいずれか一つに基づく判定システム(10)である。第6の態様では、前記取得部(11)は、前記撹拌対象物(40)に所定の処理を行ったときの前記波形データを取得する。この態様によれば、撹拌対象物(40)の状態の判定の精度の更なる向上が図れる。
The sixth aspect is a determination system (10) based on any one of the first to fourth aspects. In the sixth aspect, the acquisition unit (11) acquires the waveform data when the stirring object (40) is subjected to a predetermined process. According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
第7の態様は、第1~第6の態様のいずれか一つに基づく判定システム(10)である。第7の態様では、前記判定部(13)は、前記撹拌対象物(40)の粘度を判定する。この態様によれば、撹拌対象物(40)の粘度の判定が可能となる。
The seventh aspect is a determination system (10) based on any one of the first to sixth aspects. In the seventh aspect, the determination unit (13) determines the viscosity of the stirring object (40). According to this aspect, it is possible to determine the viscosity of the agitated object (40).
第8の態様は、第1~第6の態様のいずれか一つに基づく判定システム(10)である。第8の態様では、前記撹拌対象物(40)は、均一に混ざるほど柔らかくなる。前記判定部(13)は、前記撹拌対象物(40)が所定の柔らかさを持っているかを判定する。この態様によれば、撹拌対象物(40)の柔らかさを所定の柔らかさに調整する作業が容易に行えるようになる。
The eighth aspect is the determination system (10) based on any one of the first to sixth aspects. In the eighth aspect, the stirring object (40) becomes softer as it is uniformly mixed. The determination unit (13) determines whether the stirring object (40) has a predetermined softness. According to this aspect, the work of adjusting the softness of the stirring object (40) to a predetermined softness can be easily performed.
第9の態様は、第1~第6の態様のいずれか一つに基づく判定システム(10)である。第9の態様では、前記撹拌対象物(40)は、均一に混ざるほど固くなる。前記判定部(13)は、前記撹拌対象物(40)が所定の固さを持っているかを判定する。この態様によれば、撹拌対象物(40)の固さを所定の固さに調整する作業が容易に行えるようになる。
The ninth aspect is a determination system (10) based on any one of the first to sixth aspects. In the ninth aspect, the stirring object (40) becomes harder as it is uniformly mixed. The determination unit (13) determines whether the stirring object (40) has a predetermined hardness. According to this aspect, the work of adjusting the hardness of the agitated object (40) to a predetermined hardness can be easily performed.
第10の態様は、第1~第9の態様のいずれか一つに基づく判定システム(10)である。第10の態様では、前記判定システム(10)は、前記波形を周波数軸波形に変換し、前記周波数軸波形から前記変化を含み得る部分を抽出する抽出部(12)を更に備える。前記判定部(13)は、前記抽出部(12)で抽出された前記部分に基づいて、前記撹拌対象物(40)の状態を判定する。この態様によれば、撹拌対象物(40)の状態の判定の精度の更なる向上が図れる。
The tenth aspect is a determination system (10) based on any one of the first to ninth aspects. In a tenth aspect, the determination system (10) further includes an extraction unit (12) that converts the waveform into a frequency axis waveform and extracts a portion that may include the change from the frequency axis waveform. The determination unit (13) determines the state of the stirring object (40) based on the portion extracted by the extraction unit (12). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
第11の態様は、第10の態様に基づく判定システム(10)である。第11の態様では、前記判定部(13)は、学習済みモデル(M11)を利用して、前記部分から前記撹拌対象物(40)の状態を判定する。この態様によれば、撹拌対象物(40)の状態の判定の精度の更なる向上が図れる。
The eleventh aspect is a determination system (10) based on the tenth aspect. In the eleventh aspect, the determination unit (13) determines the state of the stirring object (40) from the portion using the trained model (M11). According to this aspect, the accuracy of determining the state of the stirring object (40) can be further improved.
第12の態様は、第1~第11の態様のいずれか一つに基づく判定システム(10)である。第12の態様では、前記判定システム(10)は、前記電流(I30,I31,I32)を測定して前記波形データを出力する測定部(20)を更に備える。前記測定部(20)は、微分型の電流センサを含む。この態様によれば、撹拌対象物(40)の状態の判定の精度を向上できる。
The twelfth aspect is a determination system (10) based on any one of the first to eleventh aspects. In the twelfth aspect, the determination system (10) further includes a measurement unit (20) that measures the currents (I30, I31, I32) and outputs the waveform data. The measuring unit (20) includes a differential type current sensor. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
第13の態様は、第12の態様に基づく判定システム(10)である。第13の態様では、前記測定部(20)は、前記電流(I30,I31,I32)が流れる電線(32,321,322)に取り付けられる。この態様によれば、判定システム(10)を容易に実装できる。
The thirteenth aspect is a determination system (10) based on the twelfth aspect. In the thirteenth aspect, the measuring unit (20) is attached to an electric wire (32,321,322) through which the current (I30, I31, I32) flows. According to this aspect, the determination system (10) can be easily implemented.
第14の態様は、判定方法であって、取得ステップと、判定ステップとを含む。前記取得ステップは、撹拌対象物(40)を撹拌する撹拌器(30)の駆動装置(31)に供給される電流(I30,I31,I32)に関する波形を示す波形データを取得するステップである。前記判定ステップは、前記波形データから得られる、前記駆動装置(31)にかかる力の特定方向の成分に起因する変化から、前記撹拌対象物(40)の対象状態を判定するステップである。この態様によれば、撹拌対象物(40)の状態の判定の精度を向上できる。
The 14th aspect is a determination method, which includes an acquisition step and a determination step. The acquisition step is a step of acquiring waveform data showing waveforms related to currents (I30, I31, I32) supplied to the drive device (31) of the stirrer (30) that stirs the stirring object (40). The determination step is a step of determining the target state of the stirring object (40) from the change caused by the component of the force applied to the driving device (31) in the specific direction obtained from the waveform data. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
第15の態様は、プログラムであって、1以上のプロセッサに、第14の態様の判定方法を実行させるための、プログラムである。この態様によれば、撹拌対象物(40)の状態の判定の精度を向上できる。
The fifteenth aspect is a program, which is a program for causing one or more processors to execute the determination method of the fourteenth aspect. According to this aspect, the accuracy of determining the state of the stirring object (40) can be improved.
10 判定システム
11 取得部
12 抽出部
13 判定部
20 測定部
30 撹拌器
31 駆動装置
311,312 モータ
311a,312a ロータ
32,321,322 電線
341,342 回転体
40 撹拌対象物
I30,I31,I32 電流
M11 学習済みモデル 10Judgment system 11 Acquisition unit 12 Extraction unit 13 Judgment unit 20 Measurement unit 30 Stirrer 31 Drive device 311, 312 Motors 311a, 312a Rotor 32, 321, 322 Electric wire 341,342 Rotating body 40 Stirring object I30, I31, I32 Current M11 trained model
11 取得部
12 抽出部
13 判定部
20 測定部
30 撹拌器
31 駆動装置
311,312 モータ
311a,312a ロータ
32,321,322 電線
341,342 回転体
40 撹拌対象物
I30,I31,I32 電流
M11 学習済みモデル 10
Claims (15)
- 撹拌対象物を撹拌する機構部と、前記機構部を駆動する駆動装置とを有する撹拌器の前記駆動装置に供給される電流に関する波形を示す波形データを取得する取得部と、
前記波形データから得られる、前記駆動装置にかかる力の特定方向の成分に起因する変化に基づいて前記撹拌対象物の状態を判定する判定部と、
を備えた判定システム。 An acquisition unit that acquires waveform data showing a waveform related to a current supplied to the drive device of a stirrer having a mechanism unit that agitates the agitated object and a drive device that drives the mechanism unit.
A determination unit that determines the state of the stirring object based on the change caused by the component of the force applied to the driving device in a specific direction obtained from the waveform data.
Judgment system equipped with. - 前記電流は、前記撹拌対象物を撹拌している状態で前記駆動装置に供給される、請求項1に記載の判定システム。 The determination system according to claim 1, wherein the electric current is supplied to the driving device in a state where the stirring object is being stirred.
- 前記撹拌器は前記撹拌対象物を撹拌する第1の回転体を含み、
前記駆動装置は、前記第1の回転体を回転させる第1のロータを有する第1のモータを含み、
前記駆動装置にかかる前記力は前記第1のモータの前記第1のロータにかかる力である、請求項1又は2に記載の判定システム。 The stirrer includes a first rotating body that stirs the agitated object.
The drive device includes a first motor having a first rotor for rotating the first rotating body.
The determination system according to claim 1 or 2, wherein the force applied to the drive device is a force applied to the first rotor of the first motor. - 前記撹拌器は前記第1の回転体から独立して前記撹拌対象物を撹拌する第2の回転体をさらに含み、
前記駆動装置は、前記第2の回転体を回転させる第2のロータを有する第2のモータをさらに含み、
前記駆動装置にかかる前記力は前記第1のモータの前記第1のロータにかかる前記力と前記第2のモータの前記第2のロータにかかる力である、請求項3に記載の判定システム。 The stirrer further includes a second rotating body that agitates the agitated object independently of the first rotating body.
The drive device further includes a second motor having a second rotor that rotates the second rotating body.
The determination system according to claim 3, wherein the force applied to the drive device is a force applied to the first rotor of the first motor and a force applied to the second rotor of the second motor. - 前記取得部は、前記回転体の回転数を変動させたときに前記撹拌対象物を撹拌する前記撹拌器を駆動する前記駆動装置に供給される前記電流に関する前記波形を示す前記波形データを取得する、請求項3又は4に記載の判定システム。 The acquisition unit acquires the waveform data showing the waveform regarding the current supplied to the driving device that drives the stirring device that stirs the stirring object when the rotation speed of the rotating body is changed. , The determination system according to claim 3 or 4.
- 前記取得部は、前記撹拌対象物に所定の処理を行ったときに前記撹拌対象物を撹拌する前記撹拌器を駆動する前記駆動装置に供給される前記電流に関する前記波形を示す前記波形データを取得する、請求項1~4のいずれか一つに記載の判定システム。 The acquisition unit acquires the waveform data showing the waveform of the current supplied to the drive device that drives the stirrer that stirs the agitated object when a predetermined process is performed on the agitated object. The determination system according to any one of claims 1 to 4.
- 前記撹拌対象物の前記状態は前記撹拌対象物の粘度である、請求項1~6のいずれか一つに記載の判定システム。 The determination system according to any one of claims 1 to 6, wherein the state of the stirring object is the viscosity of the stirring target.
- 前記撹拌対象物は均一に混ざるほど柔らかくなり、
前記判定部は、前記駆動装置にかかる前記力の前記特定方向の前記成分に起因する前記変化に基づいて前記撹拌対象物が所定の柔らかさを有しているか否かを判定する、請求項1~6のいずれか一つに記載の判定システム。 The agitated object becomes softer as it is mixed uniformly.
The determination unit determines whether or not the stirring object has a predetermined softness based on the change caused by the component of the force applied to the driving device in the specific direction. The determination system according to any one of 6 to 6. - 前記撹拌対象物は均一に混ざるほど固くなり、
前記判定部は、前記駆動装置にかかる前記力の前記特定方向の前記成分に起因する前記変化に基づいて前記撹拌対象物が所定の固さを有しているか否かを判定する、
請求項1~6のいずれか一つに記載の判定システム。 The agitated object becomes harder as it is mixed uniformly,
The determination unit determines whether or not the stirring object has a predetermined hardness based on the change caused by the component of the force applied to the driving device in the specific direction.
The determination system according to any one of claims 1 to 6. - 前記波形を周波数軸上で表現される周波数軸波形に変換し、前記周波数軸波形から前記変化を含み得る部分を抽出する抽出部を更に備え、
前記判定部は、前記抽出部で抽出された前記部分に基づいて前記撹拌対象物の前記状態を判定する、
請求項1~9のいずれか一つに記載の判定システム。 Further provided with an extraction unit, which converts the waveform into a frequency axis waveform expressed on the frequency axis and extracts a portion containing the change from the frequency axis waveform.
The determination unit determines the state of the stirring object based on the portion extracted by the extraction unit.
The determination system according to any one of claims 1 to 9. - 前記判定部は、学習済みモデルを利用して、前記部分から前記撹拌対象物の前記状態を判定する、請求項10に記載の判定システム。 The determination system according to claim 10, wherein the determination unit determines the state of the stirring object from the portion using the trained model.
- 前記電流を測定して前記波形データを出力する微分型の電流センサを有する測定部を更に備えた、請求項1~11に記載のいずれか一つの判定システム。 The determination system according to any one of claims 1 to 11, further comprising a measuring unit having a differential type current sensor that measures the current and outputs the waveform data.
- 前記測定部は、前記電流が流れる電線に取り付けられる、請求項12に記載の判定システム。 The determination system according to claim 12, wherein the measuring unit is attached to an electric wire through which the current flows.
- 撹拌対象物を撹拌する撹拌器を駆動さうる駆動装置に供給される電流に関する波形を示す波形データを取得するステップと、
前記波形データから得られる、前記駆動装置にかかる力の特定方向の成分に起因する変化から、前記撹拌対象物の状態を判定するステップと、
を含む、撹拌対象物の状態の判定方法。 A step of acquiring waveform data showing a waveform related to a current supplied to a drive device that can drive a stirrer that stirs an object to be agitated.
The step of determining the state of the stirring object from the change caused by the component of the force applied to the driving device in a specific direction obtained from the waveform data, and
A method for determining the state of an object to be stirred, including. - 1以上のプロセッサに請求項14に記載の判定方法を実行させるためのプログラム。 A program for causing one or more processors to execute the determination method according to claim 14.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080036047.7A CN113825561B (en) | 2019-08-22 | 2020-06-03 | Determination system, determination method, program product |
| JP2021540639A JP7539114B2 (en) | 2019-08-22 | 2020-06-03 | Judgment system, judgment method, and program |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-152367 | 2019-08-22 | ||
| JP2019152367 | 2019-08-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021033390A1 true WO2021033390A1 (en) | 2021-02-25 |
Family
ID=74660846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/021948 WO2021033390A1 (en) | 2019-08-22 | 2020-06-03 | Assessment system, assessment method, and program |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7539114B2 (en) |
| CN (1) | CN113825561B (en) |
| WO (1) | WO2021033390A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7154664B1 (en) | 2022-03-30 | 2022-10-18 | 鈴鹿エンヂニヤリング株式会社 | Kneading adjustment method |
| JP7299655B1 (en) | 2022-03-30 | 2023-06-28 | 鈴鹿エンヂニヤリング株式会社 | Evaluation method of kneading state and kneading machine |
| WO2023190764A1 (en) | 2022-03-30 | 2023-10-05 | 鈴鹿エンヂニヤリング株式会社 | Kneading state evaluation method, kneader, and kneading adjustment method |
| JP7542290B1 (en) | 2024-03-26 | 2024-08-30 | 株式会社写真化学 | Mixing/defoaming processing data analysis device, processing condition determination device, and mixing/defoaming processing system |
| WO2025028197A1 (en) * | 2023-07-31 | 2025-02-06 | 長瀬産業株式会社 | Server, method, and program |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01163533U (en) * | 1988-05-06 | 1989-11-15 | ||
| JPH11295205A (en) * | 1998-04-09 | 1999-10-29 | Kanegafuchi Chem Ind Co Ltd | Apparatus and method for stirring |
| JP2015073942A (en) * | 2013-10-09 | 2015-04-20 | 株式会社日立製作所 | Water treatment system |
| JP2015102713A (en) * | 2013-11-26 | 2015-06-04 | キヤノン株式会社 | Image forming apparatus |
| JP2016109674A (en) * | 2014-12-02 | 2016-06-20 | 株式会社品川工業所 | Device, program, and method for detecting state change of processing object, and processing device |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004101444A (en) * | 2002-09-11 | 2004-04-02 | Fuji Photo Film Co Ltd | Method and apparatus for detecting concentration |
| JP4782664B2 (en) * | 2006-12-06 | 2011-09-28 | テーブルマーク株式会社 | Method for detecting the kneading behavior of food dough |
| EP2686675A4 (en) * | 2011-03-14 | 2014-09-10 | Breville R & D Pty Ltd | Ice cream maker |
| WO2013002175A1 (en) * | 2011-06-30 | 2013-01-03 | Dic株式会社 | Reaction solution viscosity detection method, reaction solution viscosity detection device, method for obtaining reaction product, and manufacturing device for obtaining reaction product |
| JP2015132570A (en) * | 2014-01-15 | 2015-07-23 | 富士工業株式会社 | Viscosity measurement device and viscosity measurement method |
| WO2016042481A1 (en) * | 2014-09-15 | 2016-03-24 | Stellenbosch University | A method and system for determining fluid density |
-
2020
- 2020-06-03 JP JP2021540639A patent/JP7539114B2/en active Active
- 2020-06-03 WO PCT/JP2020/021948 patent/WO2021033390A1/en active Application Filing
- 2020-06-03 CN CN202080036047.7A patent/CN113825561B/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01163533U (en) * | 1988-05-06 | 1989-11-15 | ||
| JPH11295205A (en) * | 1998-04-09 | 1999-10-29 | Kanegafuchi Chem Ind Co Ltd | Apparatus and method for stirring |
| JP2015073942A (en) * | 2013-10-09 | 2015-04-20 | 株式会社日立製作所 | Water treatment system |
| JP2015102713A (en) * | 2013-11-26 | 2015-06-04 | キヤノン株式会社 | Image forming apparatus |
| JP2016109674A (en) * | 2014-12-02 | 2016-06-20 | 株式会社品川工業所 | Device, program, and method for detecting state change of processing object, and processing device |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7154664B1 (en) | 2022-03-30 | 2022-10-18 | 鈴鹿エンヂニヤリング株式会社 | Kneading adjustment method |
| JP7299655B1 (en) | 2022-03-30 | 2023-06-28 | 鈴鹿エンヂニヤリング株式会社 | Evaluation method of kneading state and kneading machine |
| WO2023190764A1 (en) | 2022-03-30 | 2023-10-05 | 鈴鹿エンヂニヤリング株式会社 | Kneading state evaluation method, kneader, and kneading adjustment method |
| JP2023149270A (en) * | 2022-03-30 | 2023-10-13 | 鈴鹿エンヂニヤリング株式会社 | Kneading adjustment method |
| JP2023152636A (en) * | 2022-03-30 | 2023-10-17 | 鈴鹿エンヂニヤリング株式会社 | Kneading state evaluation method and kneader |
| WO2025028197A1 (en) * | 2023-07-31 | 2025-02-06 | 長瀬産業株式会社 | Server, method, and program |
| JP7542290B1 (en) | 2024-03-26 | 2024-08-30 | 株式会社写真化学 | Mixing/defoaming processing data analysis device, processing condition determination device, and mixing/defoaming processing system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113825561A (en) | 2021-12-21 |
| CN113825561B (en) | 2024-11-12 |
| JPWO2021033390A1 (en) | 2021-02-25 |
| JP7539114B2 (en) | 2024-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021033390A1 (en) | Assessment system, assessment method, and program | |
| US6774601B2 (en) | System and method for predicting mechanical failures in machinery driven by an induction motor | |
| US10180382B2 (en) | Viscoelasticity measurement method and viscoelasticity measurement device | |
| Kumar et al. | Development of LDA based indicator for the detection of unbalance and misalignment at different shaft speeds | |
| CN1918522B (en) | coal grinding machine | |
| JP2018195266A (en) | State analyzer, state analysis method, and program | |
| AU2002248976B2 (en) | Fluid properties evaluation | |
| Barnes et al. | Controlled-stress rotational rheometry: An historical review | |
| CN113267247B (en) | Vibration frequency measuring method, device and measuring instrument for electric toothbrush | |
| JP6771353B2 (en) | How to operate an electric motor | |
| JP6822242B2 (en) | Diagnostic equipment, diagnostic systems, diagnostic methods and programs | |
| AU2002248976A1 (en) | Fluid properties evaluation | |
| CN114207402B (en) | Characteristic evaluation device and characteristic evaluation method for coupling | |
| CN102022314A (en) | Fan test fixture and test system | |
| JP6727152B2 (en) | Method for detecting whipping state of cream during stirring and method for producing whipped cream | |
| CN106095019B (en) | Information processing device and POS terminal device | |
| JP2014001995A (en) | Viscosity measuring method with stirring function, and apparatus for implementing the same | |
| KR102595992B1 (en) | Viscosity estimation device and viscosity estimation method | |
| TW202112486A (en) | Shaft coupling characterization device and characterization method | |
| CN205659628U (en) | Magnetic stirrer | |
| JP4317932B2 (en) | Torque detection device | |
| WO2004070359A1 (en) | Yield test method and apparatus | |
| JP2005069716A (en) | Torque detection device | |
| Hashimoto et al. | Development of a torque-sensorless viscometer for food processing applications | |
| CN119935819A (en) | Method, device, equipment and medium for testing apparent viscosity of materials |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20855677 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021540639 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20855677 Country of ref document: EP Kind code of ref document: A1 |