WO2020196045A1 - Clutch control device for saddle-type vehicle - Google Patents
Clutch control device for saddle-type vehicle Download PDFInfo
- Publication number
- WO2020196045A1 WO2020196045A1 PCT/JP2020/011511 JP2020011511W WO2020196045A1 WO 2020196045 A1 WO2020196045 A1 WO 2020196045A1 JP 2020011511 W JP2020011511 W JP 2020011511W WO 2020196045 A1 WO2020196045 A1 WO 2020196045A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- clutch
- actuator
- hydraulic pressure
- control
- valve
- Prior art date
Links
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D25/00—Fluid-actuated clutches
- F16D25/08—Fluid-actuated clutches with fluid-actuated member not rotating with a clutching member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D48/00—External control of clutches
- F16D48/02—Control by fluid pressure
Definitions
- the present invention relates to a clutch control device for a saddle-mounted vehicle.
- the present invention claims priority based on Japanese Patent Application No. 2019-059880 filed in Japan on March 27, 2019, the contents of which are incorporated herein by reference.
- Patent Document 1 in a saddle-riding vehicle, a structure equipped with a so-called normally open type automatic clutch is known, which is in a connected state in which power can be transmitted when the actuator is operating and returns to a disconnected state in which power cannot be transmitted when the actuator is not operating.
- the structure of Patent Document 1 is provided in an actuator that supplies hydraulic pressure to a hydraulic clutch, a solenoid valve that can open and close an oil flow path that connects the actuator and the hydraulic clutch, and a bypass flow path that bypasses the solenoid valve. It includes a one-way valve and a control unit that controls an actuator and a solenoid valve.
- the engaged state (connected state) of the hydraulic clutch is maintained by closing the solenoid valve after driving the actuator.
- saddle-riding vehicles may stop on an uphill slope. If the actuator is continuously driven while the vehicle is stopped on an uphill (half-clutch is stopped), the supply of unnecessary hydraulic pressure may increase and the power consumption may increase.
- an object of the present invention is to suppress reduction of power consumption in a clutch control device for a saddle-riding vehicle.
- the clutch control device for a saddle-riding vehicle includes a normally open type clutch device (26), an actuator (50) for supplying hydraulic pressure to the clutch device (26), and the actuator (50).
- a one-way valve (53c1) that shuts off the supply of hydraulic pressure to the actuator (53c1), an actuator holding control that holds the hydraulic pressure supplied to the clutch device (26) by continuing to drive the actuator (50), and the actuator (50).
- the valve mechanism (56) is closed to hold the hydraulic pressure supplied to the clutch device (26), and a control unit (60) is provided.
- the control unit (60) switches from the actuator holding control to the valve holding control.
- the clutch control device for the saddle-riding vehicle according to (2) above is further provided with an inertial measurement unit (49) for detecting that the vehicle (1) is in the uphill condition, and the control is provided.
- the unit (60) may calculate the hydraulic pressure required to maintain the stopped position based on the detection result of the inertial measurement unit (49).
- the control unit switches from the actuator holding control to the valve holding control when a predetermined time elapses while maintaining the actuator holding control. , Has the following effects. Compared with the case where the actuator holding control is continued, the unnecessary supply of hydraulic pressure can be reduced. Therefore, the power consumption can be reduced.
- the control unit when the control unit detects that the vehicle is in an uphill condition, the control unit stops with a half-clutch according to the uphill condition.
- the control unit stops with a half-clutch according to the uphill condition.
- an inertial measurement unit for detecting that the vehicle is in the uphill condition is further provided, and the control unit is an inertial measurement unit.
- this embodiment is applied to a motorcycle 1 as an example of a saddle-riding vehicle.
- the front wheels 2 of the motorcycle 1 are supported by the lower ends of a pair of left and right front forks 3.
- the upper parts of the left and right front forks 3 are supported by the head pipe 6 at the front end of the vehicle body frame 5 via the steering stem 4.
- a bar-type steering handle 4a is mounted on the top bridge of the steering stem 4.
- the vehicle body frame 5 includes a head pipe 6, a main tube 7 extending downward and rearward from the head pipe 6 in the vehicle width direction (left-right direction) center, and left and right pivot frames 8 connected below the rear end portion of the main tube 7. It includes a tube 7 and a seat frame 9 connected to the rear of the left and right pivot frames 8.
- the front end portion of the swing arm 11 is pivotally supported on the left and right pivot frames 8 so as to be swingable.
- the rear wheel 12 of the motorcycle 1 is supported at the rear end of the swing arm 11.
- a fuel tank 18 is supported above the left and right main tubes 7.
- a front seat 19 and a rear seat cover 19a are supported side by side in front of and behind the seat frame 9 behind the fuel tank 18.
- the periphery of the seat frame 9 is covered with a rear cowl 9a.
- a power unit PU including the prime mover of the motorcycle 1 is suspended below the left and right main tubes 7, a power unit PU including the prime mover of the motorcycle 1 is suspended.
- the power unit PU is linked to the rear wheel 12 via, for example, a chain type transmission mechanism.
- the power unit PU integrally has an engine (internal combustion engine, prime mover) 13 located on the front side thereof and a transmission 21 located on the rear side thereof.
- the engine 13 is, for example, a multi-cylinder engine in which the rotation axis of the crankshaft 14 is aligned in the vehicle width direction.
- the engine 13 includes a cylinder 16 that stands upward from the front portion of the crankcase 15.
- the rear portion of the crankcase 15 is a transmission case 17 that houses the transmission 21.
- the transmission 21 is a stepped transmission having a main shaft 22, a counter shaft 23, and a transmission gear group 24 straddling both shafts 22, 23.
- the counter shaft 23 constitutes an output shaft of the transmission 21 (power unit PU).
- the end of the counter shaft 23 projects to the rear left side of the crankcase 15.
- the protruding end of the counter shaft 23 is connected to the rear wheel 12 via a chain-type transmission mechanism including a drive sprocket 27 (see FIG. 1).
- the transmission gear group 24 has gears corresponding to the number of gears supported by both shafts 22 and 23, respectively.
- the transmission 21 is of a constant meshing type in which the corresponding gear pairs of the shifting gear group 24 are always meshed between the shafts 22 and 23.
- the plurality of gears supported by the shafts 22 and 23 are classified into a free gear that can rotate with respect to the corresponding shaft and a slide gear (shifter) that is spline-fitted to the corresponding shaft.
- One of the free gear and the slide gear is provided with a dog that is convex in the axial direction, and the other is provided with a slot that is concave in the axial direction to engage the dog. That is, the transmission 21 is a so-called dog mission.
- the main shaft 22 and the counter shaft 23 of the transmission 21 are arranged side by side behind the crankshaft 14 (see FIG. 1).
- a clutch device 26 operated by a clutch actuator 50 (see FIG. 3) is coaxially arranged at the right end of the main shaft 22.
- the clutch device 26 is, for example, a wet multi-plate clutch. That is, the clutch device 26 is a so-called normally open clutch in which the clutch device 26 is in a connected state in which power can be transmitted by supplying hydraulic pressure from the clutch actuator 50, and returns to a disengaged state in which power cannot be transmitted when the hydraulic pressure is not supplied from the clutch actuator 50.
- the rotational power of the crankshaft 14 is transmitted to the main shaft 22 via the clutch device 26, and is transmitted from the main shaft 22 to the counter shaft 23 via an arbitrary gear pair of the transmission gear group 24.
- the clutch device 26 may include a back torque limiter. The back torque limiter mechanically reduces the clutch capacity when a back torque equal to or higher than a specified value acts on the cam mechanism provided in the clutch device 26.
- a change mechanism 25 for switching gear pairs of the transmission gear group 24 is housed above the rear of the transmission 21.
- the change mechanism 25 includes a hollow cylindrical shift drum 36 substantially parallel to both shafts 22 and 23.
- a lead groove pattern is formed on the outer circumference of the shift drum 36.
- the change mechanism 25 operates a plurality of shift forks 36a according to the pattern of the lead groove by the rotation of the shift drum 36. As a result, the gear pair used for power transmission between the shafts 22 and 23 in the transmission gear group 24 is switched.
- the change mechanism 25 has a shift spindle 31 substantially parallel to the shift drum 36.
- the shift arm 31a fixed to the shift spindle 31 rotates the shift drum 36, and the shift fork 36a is moved in the axial direction according to the pattern of the lead groove.
- the gear pair capable of transmitting power in the transmission gear group 24 is switched (that is, the shift stage is switched).
- the shift spindle 31 projects the shaft outer portion 31b to the outside (left side) of the crankcase 15 in the vehicle width direction so that the change mechanism 25 can be operated (see FIG. 1).
- a shift load sensor 42 (shift operation detecting means, see FIG. 1) is coaxially attached to the shaft outer portion 31b of the shift spindle 31.
- a swing lever 33 is attached to the shaft outer portion 31b (or the rotation shaft of the shift load sensor 42) of the shift spindle 31.
- the swing lever 33 has a base end portion 33a clamped and fixed to the shift spindle 31 (or a rotating shaft), and a tip end portion 33b of a portion extending rearward from the base end portion 33a.
- the upper end of the link rod 34 is swingably connected to the tip 33b of the swing lever 33 via an upper ball joint 34a.
- the lower end of the link rod 34 is swingably connected to a shift pedal 32 (see FIG. 1) operated by the driver via a lower ball joint (not shown).
- the front end portion of the shift pedal 32 is supported on the lower portion of the crankcase 15 so as to be vertically swingable via an axis along the left-right direction.
- a pedal portion for hanging the toes of the driver placed on the step 32a is provided at the rear end of the shift pedal 32.
- the lower end of the link rod 34 is connected to the front-rear intermediate portion of the shift pedal 32.
- the driver only performs the shifting operation of the transmission 21 (foot operation of the shift pedal 32), and the clutch device 26 is automatically engaged and disconnected by electric control according to the operation of the shift pedal 32.
- the so-called semi-automatic transmission system (automatic clutch type transmission system) is adopted.
- the speed change system includes a clutch actuator 50, an ECU 60 (Electronic Control Unit), and various sensors 41 to 45.
- the ECU 60 includes detection information from a gear position sensor 41 that detects a shift stage from the rotation angle of the shift drum 36, a shift load sensor 42 (for example, a torque sensor) that detects an operation torque input to the shift spindle 31, and throttle opening.
- the clutch actuator 50 is operated and controlled, and the ignition device 46 and the fuel injection device 47 are operated and controlled based on various vehicle state detection information from the degree sensor 43, the vehicle speed sensor 44, the engine rotation speed sensor 45, and the like.
- the engine speed is controlled by a throttle by wire (TBW) including a throttle valve and an accelerator grip.
- TW throttle by wire
- Detection information from the hydraulic sensors 57 and 58 (see FIG. 3), the shift operation detection switch (shift neutral switch) 48, and the gyro sensor 49 that detects the vehicle body condition (movement) is also input to the ECU 60.
- the gyro sensor 49 is an IMU (inertial measurement unit).
- the gyro sensor 49 outputs a signal corresponding to the acceleration component in the detection direction to the ECU 60.
- the gyro sensor 49 may be built in the ECU 60.
- Reference numeral 60A in the figure indicates the clutch control device of this embodiment.
- the clutch actuator 50 can control the hydraulic pressure for connecting and disconnecting the clutch device 26 by controlling the operation by the ECU 60.
- the clutch actuator 50 includes a motor 52 (for example, an electric motor) as a drive source and a master cylinder 51 driven by the motor 52.
- the clutch actuator 50 constitutes an integrated clutch control unit 50A together with a hydraulic circuit device 53 provided between the master cylinder 51 and the hydraulic supply / discharge port 50p.
- the ECU 60 calculates a target value of the hydraulic pressure supplied to the slave cylinder 28 (hereinafter, also referred to as “target hydraulic pressure”) for engaging and disengaging the clutch device 26 based on a preset calculation program.
- the ECU 60 controls the clutch control unit 50A so that the oil pressure on the slave cylinder 28 side (slave oil pressure) detected by the downstream oil pressure sensor 58 approaches the target oil pressure.
- the master cylinder 51 strokes the piston 51b in the cylinder body 51a by driving the motor 52 so that the hydraulic oil in the cylinder body 51a can be supplied and discharged to the slave cylinder 28.
- reference numeral 55 indicates a conversion mechanism as a ball screw mechanism
- reference numeral 54 indicates a transmission mechanism straddling the motor 52 and the conversion mechanism 55
- reference numeral 51e indicates a reservoir connected to the master cylinder 51.
- the hydraulic circuit device 53 has a valve mechanism (solenoid valve 56) that opens or shuts off an intermediate portion of a main oil passage (hydraulic oil supply / exhaust passage) 53 m extending from the master cylinder 51 to the clutch device 26 side (slave cylinder 28 side). are doing.
- the main oil passage 53m of the hydraulic circuit device 53 is divided into an upstream oil passage 53a on the master cylinder 51 side of the solenoid valve 56 and a downstream oil passage 53b on the slave cylinder 28 side of the solenoid valve 56. ..
- the hydraulic circuit device 53 further includes a bypass oil passage 53c that bypasses the solenoid valve 56 and connects the upstream oil passage 53a and the downstream oil passage 53b.
- the solenoid valve 56 is a so-called normally open valve.
- the bypass oil passage 53c is provided with a one-way valve 53c1 that allows hydraulic oil to flow only in the direction from the upstream side to the downstream side.
- an upstream oil pressure sensor 57 for detecting the oil pressure of the upstream oil passage 53a is provided.
- a downstream oil pressure sensor 58 for detecting the oil pressure of the downstream oil passage 53b is provided.
- the clutch control unit 50A is housed in, for example, the rear cowl 9a.
- the slave cylinder 28 is attached to the rear left side of the crankcase 15.
- the clutch control unit 50A and the slave cylinder 28 are connected via a hydraulic pipe 53e (see FIG. 3).
- the slave cylinder 28 is coaxially arranged on the left side of the main shaft 22.
- the slave cylinder 28 presses the push rod 28a penetrating the inside of the main shaft 22 to the right when the hydraulic pressure is supplied from the clutch actuator 50.
- the slave cylinder 28 operates the clutch device 26 in the connected state via the push rod 28a.
- the slave cylinder 28 releases the pressure on the push rod 28a and returns the clutch device 26 to the disengaged state.
- a solenoid valve 56 is provided in the hydraulic circuit device 53 of the clutch control unit 50A, and the solenoid valve 56 is closed after supplying hydraulic pressure to the clutch device 26 side.
- the supply hydraulic pressure to the clutch device 26 side is maintained, and the hydraulic pressure is supplemented by the pressure drop (recharges by the leak amount) to suppress energy consumption.
- the solenoid valve 56 When supplying hydraulic pressure from the master cylinder 51 side to the slave cylinder 28 side, the solenoid valve 56 is opened, the motor 52 is energized to drive the motor 52 in the forward rotation, and the master cylinder 51 is pressurized. As a result, the hydraulic pressure on the slave cylinder 28 side is adjusted to the clutch engagement hydraulic pressure. At this time, the drive of the clutch actuator 50 is feedback-controlled based on the detected hydraulic pressure of the downstream hydraulic pressure sensor 58.
- the solenoid valve 56 starts supplying power to the motor 52 while the valve is closed, and raises the hydraulic pressure on the upstream side.
- this hydraulic pressure is recharged to the downstream side via the bypass oil passage 53c and the one-way valve 53c1.
- the power supply to the motor 52 is stopped to stop the generation of hydraulic pressure.
- the hydraulic pressure on the downstream side is maintained between the upper limit holding hydraulic pressure HP and the lower limit holding hydraulic pressure LP, and the clutch device 26 is maintained in the engaged state.
- both the power supply to the motor 52 and the solenoid valve 56 is stopped.
- the master cylinder 51 stops generating hydraulic pressure and stops supplying hydraulic pressure to the slave cylinder 28.
- the solenoid valve 56 is opened, and the hydraulic pressure in the downstream oil passage 53b is returned to the reservoir 51e.
- the slave cylinder 28 side (downstream side) is in a low pressure state lower than the touch point hydraulic pressure TP, and the clutch device 26 is in a non-engaged state. This state corresponds to the regions G and H in FIG.
- the clutch control device 60A of the present embodiment has three types of clutch control modes.
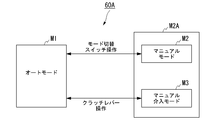
- the clutch control mode is a clutch control mode changeover switch 59 (FIG. 4) between three modes: an auto mode M1 for automatic control, a manual mode M2 for manual operation, and a manual intervention mode M3 for temporary manual operation. (See) and the clutch lever 4b (see FIG. 1) are operated to make appropriate transitions.
- the target including the manual mode M2 and the manual intervention mode M3 is referred to as a manual system M2A.
- the clutch control device 60A also functions as a clutch-by-wire system in which the clutch lever 4b and the clutch device 26 are electrically connected.
- the auto mode M1 is a mode in which the clutch device 26 is controlled by calculating the clutch capacity suitable for the running state by automatic start / shift control.
- the manual mode M2 is a mode in which the clutch capacity is calculated in response to a clutch operation instruction by the occupant to control the clutch device 26.
- the manual intervention mode M3 is a temporary manual operation mode in which the clutch operation instruction from the occupant is received during the auto mode M1, the clutch capacity is calculated from the clutch operation instruction, and the clutch device 26 is controlled. It is set to return to the auto mode M1 when the occupant stops (completely releases) the operation of the clutch lever 4b during the manual intervention mode M3.
- the clutch control device 60A of the present embodiment drives a motor to generate clutch control hydraulic pressure, and when the system is started, control is started from a clutch-off state (disengaged state) in auto mode M1. Further, the clutch control device 60A is set to return to the clutch off in the auto mode M1 because the clutch operation is not required when the engine 13 is stopped.
- the auto mode M1 basically performs clutch control automatically, and enables the motorcycle 1 to run without lever operation.
- the clutch capacity is controlled by the throttle opening, the engine speed, the vehicle speed, and the shift sensor output.
- the motorcycle 1 can be started without being stalled only by the throttle operation, and the speed can be changed only by the shift operation.
- the clutch device 26 may be automatically disengaged at an extremely low speed equivalent to idling.
- the manual intervention mode M3 is set by grasping the clutch lever 4b, and the clutch device 26 can be arbitrarily disengaged.
- the clutch capacity is controlled by the lever operation by the occupant.
- the auto mode M1 and the manual mode M2 can be switched by operating the clutch control mode changeover switch 59 (see FIG. 4) while the vehicle is stopped.
- the clutch control device 60A may include an indicator indicating that the lever operation is effective at the time of transition to the manual system M2A (manual mode M2 or manual intervention mode M3).
- the clutch is basically controlled manually, and the clutch hydraulic pressure can be controlled according to the operating angle of the clutch lever 4b.
- the engagement and disengagement of the clutch device 26 can be controlled at the will of the occupant, and the clutch device 26 can be connected and traveled even at an extremely low speed equivalent to idling.
- the clutch control automatically intervenes during the shift operation.
- the clutch actuator 50 automatically engages and disconnects the clutch device 26.
- the manual clutch operation is performed on the clutch lever 4b, so that the manual operation can be temporarily intervened in the automatic control of the clutch device 26 (manual intervention mode M3).
- FIG. 7 is an explanatory diagram of a vehicle body condition while the motorcycle of the embodiment is stopped uphill.
- An uphill stop means stopping the vehicle on an uphill.
- an uphill stop is not only when the vehicle is stopped by applying at least one of the front brake and the rear brake, but also a creep phenomenon (a phenomenon in which the vehicle moves while the engine is idling) to the extent that the vehicle does not lower using a half-clutch. ) Is generated and stopped.
- reference numeral 49 is an IMU (inertial measurement unit) for detecting that the vehicle is in a vehicle body condition (hereinafter, also referred to as “uphill condition”) while the vehicle is stopped on an uphill
- reference numeral 44f is a rotational speed of the front wheel 2.
- the front wheel speed sensor for detecting hereinafter, also referred to as “front wheel speed”
- the reference numeral 44r are rear wheel speed sensors for detecting the rotational acceleration of the rear wheels 12 (hereinafter, also referred to as “rear wheel acceleration”). Shown.
- the ECU 60 calculates the oil pressure required to maintain the stopped position based on the detection result of the IMU 49.
- the ECU 60 can switch between actuator holding control (see FIG. 8) and valve holding control (see FIG. 9).
- FIG. 8 is an explanatory diagram of the actuator holding control of the embodiment.
- the actuator holding control means a control for holding the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by continuing to drive the clutch actuator 50 (actuator).
- the ECU 60 opens the solenoid valve 56 and energizes the motor 52 to pressurize the master cylinder 51, thereby supplying hydraulic pressure from the master cylinder 51 side to the slave cylinder 28 side.
- the ECU 60 holds the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by continuing to energize the motor 52.
- the hatch portion shows an oil passage in which a predetermined hydraulic pressure is applied by actuator holding control.
- FIG. 9 is an explanatory diagram of the valve holding control of the embodiment.
- the valve holding control means a control for holding the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by closing the solenoid valve 56 after driving the clutch actuator 50.
- the ECU 60 supplies electric power to the solenoid valve 56 to close the solenoid valve 56, stops the electric power supply to the motor 52, and stops the generation of hydraulic pressure.
- the ECU 60 keeps the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by closing the solenoid valve 56 and stopping the energization of the motor 52.
- the hatch portion shows an oil passage in which a predetermined hydraulic pressure is applied by valve holding control.
- step S1 the ECU 60 determines whether or not the vehicle is stopped on an uphill (whether or not the vehicle is on an uphill condition). For example, whether or not the vehicle is stopped on an uphill is determined by whether or not the IMU detection result (for example, the inclination angle of the uphill) is equal to or greater than the threshold value. If YES in step S1 (the IMU detection result is equal to or greater than the threshold value) (when the vehicle is stopped uphill), the process proceeds to step S2. If NO (the IMU detection result is less than the threshold value) in step S1 (when the vehicle is not stopped uphill), the process proceeds to step S6.
- the IMU detection result for example, the inclination angle of the uphill
- step S2 the ECU 60 has the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition (for example, the uphill inclination angle, vehicle weight, occupant weight, suspension state, etc.) (hereinafter, “stop position”). Also called “required hydraulic pressure”) is calculated. That is, when the ECU 60 detects that the vehicle is stopped uphill, the ECU 60 calculates the required hydraulic pressure for the stop position. After step S2, the process proceeds to step S3.
- the uphill condition for example, the uphill inclination angle, vehicle weight, occupant weight, suspension state, etc.
- step S3 the ECU 60 counts the timer. For example, the ECU 60 calculates the elapsed time after the calculation of the required hydraulic pressure at the stop position after the determination of YES (the vehicle is stopped uphill) in step S1. After step S3, the process proceeds to step S4.
- step S4 the ECU 60 determines whether or not the timer has expired. If YES (timer has expired) in step S4, the process proceeds to step S7. If NO (timer has not expired) in step S4, the process proceeds to step S5.
- step S5 the ECU 60 executes the actuator holding control. That is, the ECU 60 executes the actuator holding control immediately after detecting that the vehicle is stopped uphill.
- step S7 the ECU 60 executes valve holding control (allows valve holding control). That is, the ECU 60 detects that the vehicle is stopped uphill, and switches from the actuator holding control to the valve holding control after a lapse of a predetermined time (for example, after a lapse of several seconds or more). In other words, when the ECU 60 causes a creep phenomenon and the vehicle is stopped for a longer time than a predetermined time, the ECU 60 switches to valve holding control for motor protection and power consumption reduction.
- a predetermined time for example, after a lapse of several seconds or more
- step S6 the ECU 60 determines whether or not the start completion condition is satisfied. For example, whether or not the start completion condition is satisfied is determined by whether or not the rear wheel vehicle speed and the engine speed are equal to or higher than a predetermined value. If YES (rear wheel vehicle speed and engine speed are equal to or higher than the predetermined values) in step S6 (when the start completion condition is satisfied), the process proceeds to step S7. If NO (rear wheel vehicle speed and engine speed are less than predetermined values) in step S6 (when the start completion condition is not satisfied), the process proceeds to step S8.
- step S7 the ECU 60 executes valve holding control. That is, when the ECU 60 detects that the vehicle has started, the ECU 60 switches from the actuator holding control to the valve holding control.
- step S8 the ECU 60 executes the actuator holding control. That is, when the ECU 60 does not detect the completion of the start of the vehicle (when the vehicle is still stopped uphill or the vehicle is starting), the actuator holding control is continued.
- the clutch control device 60A of the motorcycle 1 of the above embodiment includes a normally open type clutch device 26, a clutch actuator 50 that supplies hydraulic pressure to the clutch device 26, and a clutch actuator 50 and a clutch device 26.
- a solenoid valve 56 that is provided in the main oil passage 53m and can switch between a valve open state in which the main oil passage 53m is communicated with the main oil passage 53m (oil passage) and a valve closed state in which the main oil passage 53m is closed.
- the one-way valve 53c1 that allows the supply of hydraulic pressure from the clutch actuator 50 to the clutch actuator 26 and shuts off the supply of hydraulic pressure from the clutch actuator 50 to the clutch actuator 50, and the clutch actuator by continuing to drive the clutch actuator 50.
- the ECU 60 performs actuator holding control for holding the hydraulic pressure supplied to 26 and valve holding control for holding the hydraulic pressure supplied to the clutch device 26 by closing the solenoid valve 56 after driving the clutch actuator 50.
- actuator holding control for holding the hydraulic pressure supplied to 26
- valve holding control for holding the hydraulic pressure supplied to the clutch device 26 by closing the solenoid valve 56 after driving the clutch actuator 50.
- the ECU 60 switches from the actuator holding control to the valve holding control. According to this configuration, it is possible to reduce the unnecessary supply of hydraulic pressure as compared with the case where the actuator holding control is continued. Therefore, the power consumption can be reduced.
- the ECU 60 when the ECU 60 detects that the vehicle is in an uphill condition, the ECU 60 calculates the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition, thereby achieving the following effects. Play. It is possible to prevent the vehicle from descending when the vehicle starts from an uphill situation. Therefore, stable start on a slope is possible regardless of the skill of the driver.
- the IMU 49 for detecting that the vehicle is in the uphill condition is further provided, and the ECU 60 calculates the hydraulic pressure required to maintain the stopped position based on the detection result of the IMU 49. , Has the following effects.
- the oil pressure required to maintain the stopped position can be accurately calculated by the calculation based on the detection result of the IMU49.
- the ECU 60 has been described with reference to an example of switching from the actuator holding control to the valve holding control after a lapse of a predetermined time after detecting that the vehicle is in an uphill condition, but the present invention is not limited to this.
- the ECU 60 may switch from the actuator holding control to the valve holding control after a lapse of a predetermined time after detecting that the vehicle is in a vehicle body condition other than an uphill stop.
- the ECU 60 when the ECU 60 detects that the vehicle is in an uphill condition, the ECU 60 gives an example of calculating the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition. However, it is not limited to this. For example, when the ECU 60 detects that the vehicle is in an uphill condition, it does not have to calculate the hydraulic pressure required to maintain the stopped position.
- the actuator holding control is switched to the valve holding control, but the present invention is not limited to this.
- the ECU 60 may continue the actuator holding control after detecting the start of the vehicle.
- the IMU49 for detecting that the vehicle is in the uphill condition has been described, but the present invention is not limited to this.
- the vehicle may not be equipped with the IMU49.
- the ECU 60 has been described with an example of calculating the hydraulic pressure required to maintain the stop position based on the detection result of the IMU49, but the present invention is not limited to this.
- the ECU 60 may calculate the hydraulic pressure required to maintain the stop position based on parameters other than the detection result of the IMU 49.
- the saddle-riding vehicle includes a general vehicle in which a driver straddles a vehicle body, and is a motorcycle (motorized bicycle and scooter-type vehicle). (Including), but also three-wheeled vehicles (including front two-wheeled and rear one-wheeled vehicles in addition to front one-wheeled and rear two-wheeled vehicles).
- the present invention can be applied not only to motorcycles but also to four-wheeled vehicles such as automobiles.
- the configuration in the above embodiment is an example of the present invention, and various modifications can be made without departing from the gist of the present invention, such as replacing the components of the embodiment with well-known components.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Abstract
This clutch control device for a saddle-type vehicle is equipped with: a normally-open clutch device (26); an actuator (50) for supplying oil pressure to the clutch device (26); an oil passage (53m) connecting the actuator (50) and the clutch device (26); a valve mechanism (56) provided in the oil passage (53m) and capable of switching the oil passage (53m) between an open state in which the oil passage (53m) is opened and a closed state in which the oil passage (53m) is closed; a one-way valve (53c1) for permitting the supplying of oil pressure from the actuator (50) to the clutch device (26) and blocking the supplying of oil pressure from the clutch device (26) to the actuator (50); and a control unit (60) for carrying out actuator holding control for continuing driving of the actuator (50) to maintain the oil pressure supplied to the clutch device (26) and valve holding control for placing the valve mechanism (56) in the closed state after driving of the actuator (50) to maintain the oil pressure supplied to the clutch device (26). When a prescribed time has elapsed while the actuator holding control is maintained, the control unit (60) switches from the actuator holding control to the valve holding control.
Description
本発明は、鞍乗り型車両のクラッチ制御装置に関する。
本発明は、2019年3月27日に、日本に出願された特願2019-059880号に基づき優先権を主張し、その内容をここに援用する。 The present invention relates to a clutch control device for a saddle-mounted vehicle.
The present invention claims priority based on Japanese Patent Application No. 2019-059880 filed in Japan on March 27, 2019, the contents of which are incorporated herein by reference.
本発明は、2019年3月27日に、日本に出願された特願2019-059880号に基づき優先権を主張し、その内容をここに援用する。 The present invention relates to a clutch control device for a saddle-mounted vehicle.
The present invention claims priority based on Japanese Patent Application No. 2019-059880 filed in Japan on March 27, 2019, the contents of which are incorporated herein by reference.
従来、鞍乗り型車両において、アクチュエータの動作時に動力伝達可能な接続状態となり、アクチュエータの非動作時に動力伝達不能な切断状態に戻る、いわゆるノーマルオープンタイプの自動クラッチを備えた構造が知られている。例えば、特許文献1の構造は、油圧クラッチに油圧を供給するアクチュエータと、アクチュエータと油圧クラッチとを接続するオイル流路を開閉可能なソレノイドバルブと、ソレノイドバルブを迂回するバイパス流路に設けられた一方向バルブと、アクチュエータおよびソレノイドバルブを制御する制御部と、を備える。特許文献1では、走行時のエンジンの駆動ロスを低減するために、アクチュエータの駆動後にソレノイドバルブを閉弁することにより油圧クラッチの締結状態(接続状態)を維持している。
Conventionally, in a saddle-riding vehicle, a structure equipped with a so-called normally open type automatic clutch is known, which is in a connected state in which power can be transmitted when the actuator is operating and returns to a disconnected state in which power cannot be transmitted when the actuator is not operating. .. For example, the structure of Patent Document 1 is provided in an actuator that supplies hydraulic pressure to a hydraulic clutch, a solenoid valve that can open and close an oil flow path that connects the actuator and the hydraulic clutch, and a bypass flow path that bypasses the solenoid valve. It includes a one-way valve and a control unit that controls an actuator and a solenoid valve. In Patent Document 1, in order to reduce the drive loss of the engine during traveling, the engaged state (connected state) of the hydraulic clutch is maintained by closing the solenoid valve after driving the actuator.
ところで、鞍乗り型車両は登り坂で停車することがある。登り坂での停車中(半クラッチ停止中)にアクチュエータの駆動を継続すると、無駄な油圧の供給が増え、消費電力が増加する可能性がある。
By the way, saddle-riding vehicles may stop on an uphill slope. If the actuator is continuously driven while the vehicle is stopped on an uphill (half-clutch is stopped), the supply of unnecessary hydraulic pressure may increase and the power consumption may increase.
そこで本発明は、鞍乗り型車両のクラッチ制御装置において、消費電力を低減することを抑制することを目的とする。
Therefore, an object of the present invention is to suppress reduction of power consumption in a clutch control device for a saddle-riding vehicle.
上記課題の解決手段として、本発明の態様は以下の構成を有する。
(1)本発明の態様に係る鞍乗り型車両のクラッチ制御装置は、ノーマルオープンタイプのクラッチ装置(26)と、前記クラッチ装置(26)に油圧を供給するアクチュエータ(50)と、前記アクチュエータ(50)と前記クラッチ装置(26)とを接続する油路(53m)と、前記油路(53m)に設けられ、前記油路(53m)を連通させる開弁状態と前記油路(53m)を閉鎖する閉弁状態とを切り替え可能なバルブ機構(56)と、前記アクチュエータ(50)から前記クラッチ装置(26)への油圧の供給を許容し、前記クラッチ装置(26)から前記アクチュエータ(50)への油圧の供給を遮断するワンウェイバルブ(53c1)と、前記アクチュエータ(50)の駆動を継続することにより前記クラッチ装置(26)に供給される油圧を保持するアクチュエータ保持制御と、前記アクチュエータ(50)の駆動後に前記バルブ機構(56)を閉弁状態とすることにより前記クラッチ装置(26)に供給される油圧を保持するバルブ保持制御と、を行う制御部(60)と、を備え、前記制御部(60)は、前記アクチュエータ保持制御を維持したまま所定時間経過した場合、前記アクチュエータ保持制御から前記バルブ保持制御に切り替える。 As a means for solving the above problems, the aspect of the present invention has the following configuration.
(1) The clutch control device for a saddle-riding vehicle according to an aspect of the present invention includes a normally open type clutch device (26), an actuator (50) for supplying hydraulic pressure to the clutch device (26), and the actuator (50). An oil passage (53 m) connecting the 50) and the clutch device (26), a valve open state provided in the oil passage (53 m) and communicating the oil passage (53 m), and the oil passage (53 m). A valve mechanism (56) capable of switching between a closed valve state and a valve mechanism (56) that allows the actuator (50) to supply hydraulic pressure to the clutch device (26), and the actuator (50) from the clutch device (26). A one-way valve (53c1) that shuts off the supply of hydraulic pressure to the actuator (53c1), an actuator holding control that holds the hydraulic pressure supplied to the clutch device (26) by continuing to drive the actuator (50), and the actuator (50). ) Is driven, the valve mechanism (56) is closed to hold the hydraulic pressure supplied to the clutch device (26), and a control unit (60) is provided. When a predetermined time elapses while maintaining the actuator holding control, the control unit (60) switches from the actuator holding control to the valve holding control.
(1)本発明の態様に係る鞍乗り型車両のクラッチ制御装置は、ノーマルオープンタイプのクラッチ装置(26)と、前記クラッチ装置(26)に油圧を供給するアクチュエータ(50)と、前記アクチュエータ(50)と前記クラッチ装置(26)とを接続する油路(53m)と、前記油路(53m)に設けられ、前記油路(53m)を連通させる開弁状態と前記油路(53m)を閉鎖する閉弁状態とを切り替え可能なバルブ機構(56)と、前記アクチュエータ(50)から前記クラッチ装置(26)への油圧の供給を許容し、前記クラッチ装置(26)から前記アクチュエータ(50)への油圧の供給を遮断するワンウェイバルブ(53c1)と、前記アクチュエータ(50)の駆動を継続することにより前記クラッチ装置(26)に供給される油圧を保持するアクチュエータ保持制御と、前記アクチュエータ(50)の駆動後に前記バルブ機構(56)を閉弁状態とすることにより前記クラッチ装置(26)に供給される油圧を保持するバルブ保持制御と、を行う制御部(60)と、を備え、前記制御部(60)は、前記アクチュエータ保持制御を維持したまま所定時間経過した場合、前記アクチュエータ保持制御から前記バルブ保持制御に切り替える。 As a means for solving the above problems, the aspect of the present invention has the following configuration.
(1) The clutch control device for a saddle-riding vehicle according to an aspect of the present invention includes a normally open type clutch device (26), an actuator (50) for supplying hydraulic pressure to the clutch device (26), and the actuator (50). An oil passage (53 m) connecting the 50) and the clutch device (26), a valve open state provided in the oil passage (53 m) and communicating the oil passage (53 m), and the oil passage (53 m). A valve mechanism (56) capable of switching between a closed valve state and a valve mechanism (56) that allows the actuator (50) to supply hydraulic pressure to the clutch device (26), and the actuator (50) from the clutch device (26). A one-way valve (53c1) that shuts off the supply of hydraulic pressure to the actuator (53c1), an actuator holding control that holds the hydraulic pressure supplied to the clutch device (26) by continuing to drive the actuator (50), and the actuator (50). ) Is driven, the valve mechanism (56) is closed to hold the hydraulic pressure supplied to the clutch device (26), and a control unit (60) is provided. When a predetermined time elapses while maintaining the actuator holding control, the control unit (60) switches from the actuator holding control to the valve holding control.
(2)上記(1)に記載の鞍乗り型車両のクラッチ制御装置では、前記制御部(60)は、車両(1)が登り坂状況であることを検知した場合、前記登り坂状況に応じて半クラッチにより停車位置を維持するために必要な油圧を算出してもよい。
(2) In the clutch control device for the saddle-riding vehicle according to (1) above, when the control unit (60) detects that the vehicle (1) is in an uphill condition, it responds to the uphill condition. The oil pressure required to maintain the stopped position may be calculated by the half-clutch.
(3)上記(2)に記載の鞍乗り型車両のクラッチ制御装置では、前記車両(1)が前記登り坂状況であることを検知するための慣性計測装置(49)を更に備え、前記制御部(60)は、前記慣性計測装置(49)の検知結果に基づいて前記停車位置を維持するために必要な油圧を算出してもよい。
(3) The clutch control device for the saddle-riding vehicle according to (2) above is further provided with an inertial measurement unit (49) for detecting that the vehicle (1) is in the uphill condition, and the control is provided. The unit (60) may calculate the hydraulic pressure required to maintain the stopped position based on the detection result of the inertial measurement unit (49).
本発明の上記(1)に記載の鞍乗り型車両のクラッチ制御装置によれば、制御部は、アクチュエータ保持制御を維持したまま所定時間経過した場合、アクチュエータ保持制御からバルブ保持制御に切り替えることで、以下の効果を奏する。
アクチュエータ保持制御を継続する場合と比較して、無駄な油圧の供給を減らすことができる。したがって、消費電力を低減することができる。 According to the clutch control device for the saddle-riding vehicle according to the above (1) of the present invention, the control unit switches from the actuator holding control to the valve holding control when a predetermined time elapses while maintaining the actuator holding control. , Has the following effects.
Compared with the case where the actuator holding control is continued, the unnecessary supply of hydraulic pressure can be reduced. Therefore, the power consumption can be reduced.
アクチュエータ保持制御を継続する場合と比較して、無駄な油圧の供給を減らすことができる。したがって、消費電力を低減することができる。 According to the clutch control device for the saddle-riding vehicle according to the above (1) of the present invention, the control unit switches from the actuator holding control to the valve holding control when a predetermined time elapses while maintaining the actuator holding control. , Has the following effects.
Compared with the case where the actuator holding control is continued, the unnecessary supply of hydraulic pressure can be reduced. Therefore, the power consumption can be reduced.
本発明の上記(2)に記載の鞍乗り型車両のクラッチ制御装置によれば、制御部は、車両が登り坂状況であることを検知した場合、前記登り坂状況に応じて半クラッチにより停車位置を維持するために必要な油圧を算出することで、以下の効果を奏する。
車両が登り坂状況から発進するときに車両が下がることを抑制することができる。そのため、運転者の技量によらず安定した坂道発進が可能となる。 According to the clutch control device for a saddle-riding vehicle according to the above (2) of the present invention, when the control unit detects that the vehicle is in an uphill condition, the control unit stops with a half-clutch according to the uphill condition. By calculating the hydraulic pressure required to maintain the position, the following effects are achieved.
It is possible to prevent the vehicle from descending when the vehicle starts from an uphill situation. Therefore, stable start on a slope is possible regardless of the skill of the driver.
車両が登り坂状況から発進するときに車両が下がることを抑制することができる。そのため、運転者の技量によらず安定した坂道発進が可能となる。 According to the clutch control device for a saddle-riding vehicle according to the above (2) of the present invention, when the control unit detects that the vehicle is in an uphill condition, the control unit stops with a half-clutch according to the uphill condition. By calculating the hydraulic pressure required to maintain the position, the following effects are achieved.
It is possible to prevent the vehicle from descending when the vehicle starts from an uphill situation. Therefore, stable start on a slope is possible regardless of the skill of the driver.
本発明の上記(3)に記載の鞍乗り型車両のクラッチ制御装置によれば、車両が前記登り坂状況であることを検知するための慣性計測装置を更に備え、制御部は、慣性計測装置の検知結果に基づいて前記停車位置を維持するために必要な油圧を算出することで、以下の効果を奏する。
慣性計測装置の検知結果に基づいた計算により、停車位置を維持するために必要な油圧を正確に算出することができる。 According to the clutch control device for a saddle-riding vehicle according to the above (3) of the present invention, an inertial measurement unit for detecting that the vehicle is in the uphill condition is further provided, and the control unit is an inertial measurement unit. By calculating the hydraulic pressure required to maintain the stopped position based on the detection result of, the following effects are obtained.
By calculation based on the detection result of the inertial measurement unit, the hydraulic pressure required to maintain the stopped position can be accurately calculated.
慣性計測装置の検知結果に基づいた計算により、停車位置を維持するために必要な油圧を正確に算出することができる。 According to the clutch control device for a saddle-riding vehicle according to the above (3) of the present invention, an inertial measurement unit for detecting that the vehicle is in the uphill condition is further provided, and the control unit is an inertial measurement unit. By calculating the hydraulic pressure required to maintain the stopped position based on the detection result of, the following effects are obtained.
By calculation based on the detection result of the inertial measurement unit, the hydraulic pressure required to maintain the stopped position can be accurately calculated.
以下、本発明の実施形態について図面を参照して説明する。なお、以下の説明における前後左右等の向きは、特に記載が無ければ以下に説明する車両における向きと同一とする。また以下の説明に用いる図中適所には、車両前方を示す矢印FR、車両左方を示す矢印LH、車両上方を示す矢印UPが示されている。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. The orientations of the front, rear, left, right, etc. in the following description shall be the same as the orientations in the vehicle described below unless otherwise specified. Further, in the appropriate place in the figure used in the following description, an arrow FR indicating the front of the vehicle, an arrow LH indicating the left side of the vehicle, and an arrow UP indicating the upper part of the vehicle are shown.
<車両全体>
図1に示すように、本実施形態は、鞍乗り型車両の一例としての自動二輪車1に適用されている。自動二輪車1の前輪2は、左右一対のフロントフォーク3の下端部に支持されている。左右フロントフォーク3の上部は、ステアリングステム4を介して、車体フレーム5の前端部のヘッドパイプ6に支持されている。ステアリングステム4のトップブリッジ上には、バータイプの操向ハンドル4aが取り付けられている。 <Whole vehicle>
As shown in FIG. 1, this embodiment is applied to amotorcycle 1 as an example of a saddle-riding vehicle. The front wheels 2 of the motorcycle 1 are supported by the lower ends of a pair of left and right front forks 3. The upper parts of the left and right front forks 3 are supported by the head pipe 6 at the front end of the vehicle body frame 5 via the steering stem 4. A bar-type steering handle 4a is mounted on the top bridge of the steering stem 4.
図1に示すように、本実施形態は、鞍乗り型車両の一例としての自動二輪車1に適用されている。自動二輪車1の前輪2は、左右一対のフロントフォーク3の下端部に支持されている。左右フロントフォーク3の上部は、ステアリングステム4を介して、車体フレーム5の前端部のヘッドパイプ6に支持されている。ステアリングステム4のトップブリッジ上には、バータイプの操向ハンドル4aが取り付けられている。 <Whole vehicle>
As shown in FIG. 1, this embodiment is applied to a
車体フレーム5は、ヘッドパイプ6と、ヘッドパイプ6から車幅方向(左右方向)中央を下後方へ延びるメインチューブ7と、メインチューブ7の後端部の下方に連なる左右ピボットフレーム8と、メインチューブ7および左右ピボットフレーム8の後方に連なるシートフレーム9と、を備えている。左右ピボットフレーム8には、スイングアーム11の前端部が揺動可能に枢支されている。スイングアーム11の後端部には、自動二輪車1の後輪12が支持されている。
The vehicle body frame 5 includes a head pipe 6, a main tube 7 extending downward and rearward from the head pipe 6 in the vehicle width direction (left-right direction) center, and left and right pivot frames 8 connected below the rear end portion of the main tube 7. It includes a tube 7 and a seat frame 9 connected to the rear of the left and right pivot frames 8. The front end portion of the swing arm 11 is pivotally supported on the left and right pivot frames 8 so as to be swingable. The rear wheel 12 of the motorcycle 1 is supported at the rear end of the swing arm 11.
左右メインチューブ7の上方には、燃料タンク18が支持されている。燃料タンク18の後方でシートフレーム9の上方には、前シート19および後シートカバー19aが前後に並んで支持されている。シートフレーム9の周囲は、リヤカウル9aに覆われている。
左右メインチューブ7の下方には、自動二輪車1の原動機を含むパワーユニットPUが懸架されている。パワーユニットPUは、後輪12と例えばチェーン式伝動機構を介して連係されている。 Afuel tank 18 is supported above the left and right main tubes 7. A front seat 19 and a rear seat cover 19a are supported side by side in front of and behind the seat frame 9 behind the fuel tank 18. The periphery of the seat frame 9 is covered with a rear cowl 9a.
Below the left and rightmain tubes 7, a power unit PU including the prime mover of the motorcycle 1 is suspended. The power unit PU is linked to the rear wheel 12 via, for example, a chain type transmission mechanism.
左右メインチューブ7の下方には、自動二輪車1の原動機を含むパワーユニットPUが懸架されている。パワーユニットPUは、後輪12と例えばチェーン式伝動機構を介して連係されている。 A
Below the left and right
パワーユニットPUは、その前側に位置するエンジン(内燃機関、原動機)13と後側に位置する変速機21とを一体に有している。エンジン13は、例えばクランクシャフト14の回転軸を車幅方向に沿わせた複数気筒エンジンである。エンジン13は、クランクケース15の前部から上方に起立するシリンダ16を備える。クランクケース15の後部は、変速機21を収容する変速機ケース17とされている。
The power unit PU integrally has an engine (internal combustion engine, prime mover) 13 located on the front side thereof and a transmission 21 located on the rear side thereof. The engine 13 is, for example, a multi-cylinder engine in which the rotation axis of the crankshaft 14 is aligned in the vehicle width direction. The engine 13 includes a cylinder 16 that stands upward from the front portion of the crankcase 15. The rear portion of the crankcase 15 is a transmission case 17 that houses the transmission 21.
<変速機>
図2に示すように、変速機21は、メインシャフト22およびカウンタシャフト23ならびに両シャフト22,23に跨る変速ギア群24を有する有段式のトランスミッションである。カウンタシャフト23は、変速機21(パワーユニットPU)の出力軸を構成している。カウンタシャフト23の端部は、クランクケース15の後部左側に突出している。カウンタシャフト23の突出端部は、ドライブスプロケット27を含むチェーン式伝動機構を介して後輪12に連結されている(図1参照)。 <Transmission>
As shown in FIG. 2, thetransmission 21 is a stepped transmission having a main shaft 22, a counter shaft 23, and a transmission gear group 24 straddling both shafts 22, 23. The counter shaft 23 constitutes an output shaft of the transmission 21 (power unit PU). The end of the counter shaft 23 projects to the rear left side of the crankcase 15. The protruding end of the counter shaft 23 is connected to the rear wheel 12 via a chain-type transmission mechanism including a drive sprocket 27 (see FIG. 1).
図2に示すように、変速機21は、メインシャフト22およびカウンタシャフト23ならびに両シャフト22,23に跨る変速ギア群24を有する有段式のトランスミッションである。カウンタシャフト23は、変速機21(パワーユニットPU)の出力軸を構成している。カウンタシャフト23の端部は、クランクケース15の後部左側に突出している。カウンタシャフト23の突出端部は、ドライブスプロケット27を含むチェーン式伝動機構を介して後輪12に連結されている(図1参照)。 <Transmission>
As shown in FIG. 2, the
変速ギア群24は、両シャフト22,23にそれぞれ支持された変速段数分のギアを有する。変速機21は、両シャフト22,23間で変速ギア群24の対応するギア対同士が常に噛み合った常時噛み合い式とされる。両シャフト22,23に支持された複数のギアは、対応するシャフトに対して回転可能なフリーギアと、対応するシャフトにスプライン嵌合するスライドギア(シフター)とに分類される。これらフリーギア及びスライドギアの一方には軸方向で凸のドグが、他方にはドグを係合させるべく軸方向で凹のスロットがそれぞれ設けられている。すなわち、変速機21は、いわゆるドグミッションである。
The transmission gear group 24 has gears corresponding to the number of gears supported by both shafts 22 and 23, respectively. The transmission 21 is of a constant meshing type in which the corresponding gear pairs of the shifting gear group 24 are always meshed between the shafts 22 and 23. The plurality of gears supported by the shafts 22 and 23 are classified into a free gear that can rotate with respect to the corresponding shaft and a slide gear (shifter) that is spline-fitted to the corresponding shaft. One of the free gear and the slide gear is provided with a dog that is convex in the axial direction, and the other is provided with a slot that is concave in the axial direction to engage the dog. That is, the transmission 21 is a so-called dog mission.
変速機21のメインシャフト22及びカウンタシャフト23は、クランクシャフト14(図1参照)の後方で前後に並んで配置されている。メインシャフト22の右端部には、クラッチアクチュエータ50(図3参照)により作動するクラッチ装置26が同軸配置されている。クラッチ装置26は、例えば湿式多板クラッチである。すなわち、クラッチ装置26は、クラッチアクチュエータ50からの油圧供給によって動力伝達可能な接続状態となり、クラッチアクチュエータ50からの油圧供給がなくなると動力伝達不能な切断状態に戻る、いわゆるノーマルオープンクラッチである。
The main shaft 22 and the counter shaft 23 of the transmission 21 are arranged side by side behind the crankshaft 14 (see FIG. 1). A clutch device 26 operated by a clutch actuator 50 (see FIG. 3) is coaxially arranged at the right end of the main shaft 22. The clutch device 26 is, for example, a wet multi-plate clutch. That is, the clutch device 26 is a so-called normally open clutch in which the clutch device 26 is in a connected state in which power can be transmitted by supplying hydraulic pressure from the clutch actuator 50, and returns to a disengaged state in which power cannot be transmitted when the hydraulic pressure is not supplied from the clutch actuator 50.
クランクシャフト14の回転動力は、クラッチ装置26を介してメインシャフト22に伝達され、メインシャフト22から変速ギア群24の任意のギア対を介してカウンタシャフト23に伝達される。
クラッチ装置26は、バックトルクリミッターを備えていてもよい。バックトルクリミッターは、クラッチ装置26に設けたカム機構に規定以上のバックトルクが作用すると、クラッチ容量を機械的に低下させる。 The rotational power of thecrankshaft 14 is transmitted to the main shaft 22 via the clutch device 26, and is transmitted from the main shaft 22 to the counter shaft 23 via an arbitrary gear pair of the transmission gear group 24.
Theclutch device 26 may include a back torque limiter. The back torque limiter mechanically reduces the clutch capacity when a back torque equal to or higher than a specified value acts on the cam mechanism provided in the clutch device 26.
クラッチ装置26は、バックトルクリミッターを備えていてもよい。バックトルクリミッターは、クラッチ装置26に設けたカム機構に規定以上のバックトルクが作用すると、クラッチ容量を機械的に低下させる。 The rotational power of the
The
変速機21の後上方には、変速ギア群24のギア対を切り替えるチェンジ機構25が収容されている。チェンジ機構25は、両シャフト22,23と実質的に平行な中空円筒状のシフトドラム36を備える。シフトドラム36の外周には、リード溝のパターンが形成されている。チェンジ機構25は、シフトドラム36の回転により、リード溝のパターンに応じて複数のシフトフォーク36aを作動させる。これにより、変速ギア群24における両シャフト22,23間の動力伝達に用いるギア対を切り替える。
A change mechanism 25 for switching gear pairs of the transmission gear group 24 is housed above the rear of the transmission 21. The change mechanism 25 includes a hollow cylindrical shift drum 36 substantially parallel to both shafts 22 and 23. A lead groove pattern is formed on the outer circumference of the shift drum 36. The change mechanism 25 operates a plurality of shift forks 36a according to the pattern of the lead groove by the rotation of the shift drum 36. As a result, the gear pair used for power transmission between the shafts 22 and 23 in the transmission gear group 24 is switched.
チェンジ機構25は、シフトドラム36と実質的に平行なシフトスピンドル31を有している。シフトスピンドル31の回転時には、シフトスピンドル31に固定されたシフトアーム31aがシフトドラム36を回転させ、リード溝のパターンに応じてシフトフォーク36aを軸方向移動させる。これにより、変速ギア群24の内の動力伝達可能なギア対を切り替える(すなわち、変速段を切り替える。)。
The change mechanism 25 has a shift spindle 31 substantially parallel to the shift drum 36. When the shift spindle 31 is rotated, the shift arm 31a fixed to the shift spindle 31 rotates the shift drum 36, and the shift fork 36a is moved in the axial direction according to the pattern of the lead groove. As a result, the gear pair capable of transmitting power in the transmission gear group 24 is switched (that is, the shift stage is switched).
シフトスピンドル31は、チェンジ機構25を操作可能とするためにクランクケース15の車幅方向外側(左方)に軸外側部31bを突出させている(図1参照)。シフトスピンドル31の軸外側部31bには、シフト荷重センサ42(シフト操作検知手段、図1参照)が同軸に取り付けられている。シフトスピンドル31の軸外側部31b(またはシフト荷重センサ42の回転軸)には、揺動レバー33が取り付けられている。揺動レバー33は、シフトスピンドル31(または回転軸)にクランプ固定される基端部33aと、基端部33aから後方へ延びる部分の先端部33bと、を有する。揺動レバー33の先端部33bには、リンクロッド34の上端部が上ボールジョイント34aを介して揺動自在に連結されている。リンクロッド34の下端部は、運転者が足操作するシフトペダル32(図1参照)に、下ボールジョイント(不図示)を介して揺動自在に連結されている。
The shift spindle 31 projects the shaft outer portion 31b to the outside (left side) of the crankcase 15 in the vehicle width direction so that the change mechanism 25 can be operated (see FIG. 1). A shift load sensor 42 (shift operation detecting means, see FIG. 1) is coaxially attached to the shaft outer portion 31b of the shift spindle 31. A swing lever 33 is attached to the shaft outer portion 31b (or the rotation shaft of the shift load sensor 42) of the shift spindle 31. The swing lever 33 has a base end portion 33a clamped and fixed to the shift spindle 31 (or a rotating shaft), and a tip end portion 33b of a portion extending rearward from the base end portion 33a. The upper end of the link rod 34 is swingably connected to the tip 33b of the swing lever 33 via an upper ball joint 34a. The lower end of the link rod 34 is swingably connected to a shift pedal 32 (see FIG. 1) operated by the driver via a lower ball joint (not shown).
図1に示すように、シフトペダル32の前端部は、クランクケース15の下部に左右方向に沿う軸を介して上下揺動可能に支持されている。シフトペダル32の後端部には、ステップ32aに載せた運転者の足先を掛けるペダル部が設けられている。シフトペダル32の前後中間部には、リンクロッド34の下端部が連結されている。
As shown in FIG. 1, the front end portion of the shift pedal 32 is supported on the lower portion of the crankcase 15 so as to be vertically swingable via an axis along the left-right direction. At the rear end of the shift pedal 32, a pedal portion for hanging the toes of the driver placed on the step 32a is provided. The lower end of the link rod 34 is connected to the front-rear intermediate portion of the shift pedal 32.
ここで、自動二輪車1は、変速機21の変速操作(シフトペダル32の足操作)のみを運転者が行い、クラッチ装置26の断接操作はシフトペダル32の操作に応じて電気制御により自動で行うようにした、いわゆるセミオートマチックの変速システム(自動クラッチ式変速システム)を採用している。
Here, in the motorcycle 1, the driver only performs the shifting operation of the transmission 21 (foot operation of the shift pedal 32), and the clutch device 26 is automatically engaged and disconnected by electric control according to the operation of the shift pedal 32. The so-called semi-automatic transmission system (automatic clutch type transmission system) is adopted.
<変速システム>
図4に示すように、上記変速システムは、クラッチアクチュエータ50、ECU60(Electronic Control Unit、制御部)および各種センサ41~45を備えている。
ECU60は、シフトドラム36の回転角から変速段を検知するギアポジションセンサ41、およびシフトスピンドル31に入力された操作トルクを検知するシフト荷重センサ42(例えばトルクセンサ)からの検知情報、ならびにスロットル開度センサ43、車速センサ44およびエンジン回転数センサ45等からの各種の車両状態検知情報等に基づいて、クラッチアクチュエータ50を作動制御するとともに、点火装置46および燃料噴射装置47を作動制御する。エンジン回転数は、スロットルバルブ及びアクセルグリップを含むスロットルバイワイヤ(throttle by wire:TBW)により制御される。 <Transmission system>
As shown in FIG. 4, the speed change system includes aclutch actuator 50, an ECU 60 (Electronic Control Unit), and various sensors 41 to 45.
TheECU 60 includes detection information from a gear position sensor 41 that detects a shift stage from the rotation angle of the shift drum 36, a shift load sensor 42 (for example, a torque sensor) that detects an operation torque input to the shift spindle 31, and throttle opening. The clutch actuator 50 is operated and controlled, and the ignition device 46 and the fuel injection device 47 are operated and controlled based on various vehicle state detection information from the degree sensor 43, the vehicle speed sensor 44, the engine rotation speed sensor 45, and the like. The engine speed is controlled by a throttle by wire (TBW) including a throttle valve and an accelerator grip.
図4に示すように、上記変速システムは、クラッチアクチュエータ50、ECU60(Electronic Control Unit、制御部)および各種センサ41~45を備えている。
ECU60は、シフトドラム36の回転角から変速段を検知するギアポジションセンサ41、およびシフトスピンドル31に入力された操作トルクを検知するシフト荷重センサ42(例えばトルクセンサ)からの検知情報、ならびにスロットル開度センサ43、車速センサ44およびエンジン回転数センサ45等からの各種の車両状態検知情報等に基づいて、クラッチアクチュエータ50を作動制御するとともに、点火装置46および燃料噴射装置47を作動制御する。エンジン回転数は、スロットルバルブ及びアクセルグリップを含むスロットルバイワイヤ(throttle by wire:TBW)により制御される。 <Transmission system>
As shown in FIG. 4, the speed change system includes a
The
ECU60には、油圧センサ57,58(図3参照)、シフト操作検知スイッチ(シフトニュートラルスイッチ)48、および車体の状況(動き)を検出するジャイロセンサ49からの検知情報も入力される。ジャイロセンサ49は、IMU(inertial measurement unit:慣性計測装置)である。ジャイロセンサ49は、検知方向の加速度成分に応じた信号をECU60に出力する。ジャイロセンサ49は、ECU60に内蔵されてもよい。図中符号60Aは本実施形態のクラッチ制御装置を示している。
Detection information from the hydraulic sensors 57 and 58 (see FIG. 3), the shift operation detection switch (shift neutral switch) 48, and the gyro sensor 49 that detects the vehicle body condition (movement) is also input to the ECU 60. The gyro sensor 49 is an IMU (inertial measurement unit). The gyro sensor 49 outputs a signal corresponding to the acceleration component in the detection direction to the ECU 60. The gyro sensor 49 may be built in the ECU 60. Reference numeral 60A in the figure indicates the clutch control device of this embodiment.
図3を併せて参照し、クラッチアクチュエータ50は、ECU60により作動制御されることで、クラッチ装置26を断接する液圧を制御可能とする。クラッチアクチュエータ50は、駆動源としてのモータ52(例えば電気モータ)と、モータ52により駆動されるマスターシリンダ51と、を備えている。クラッチアクチュエータ50は、マスターシリンダ51および油圧給排ポート50pの間に設けられる油圧回路装置53とともに、一体のクラッチ制御ユニット50Aを構成している。
ECU60は、予め設定された演算プログラムに基づいて、クラッチ装置26を断接するためにスレーブシリンダ28に供給する油圧の目標値(以下「目標油圧」ともいう。)を演算する。ECU60は、下流側油圧センサ58で検出されるスレーブシリンダ28側の油圧(スレーブ油圧)が目標油圧に近づくように、クラッチ制御ユニット50Aを制御する。 With reference to FIG. 3, theclutch actuator 50 can control the hydraulic pressure for connecting and disconnecting the clutch device 26 by controlling the operation by the ECU 60. The clutch actuator 50 includes a motor 52 (for example, an electric motor) as a drive source and a master cylinder 51 driven by the motor 52. The clutch actuator 50 constitutes an integrated clutch control unit 50A together with a hydraulic circuit device 53 provided between the master cylinder 51 and the hydraulic supply / discharge port 50p.
TheECU 60 calculates a target value of the hydraulic pressure supplied to the slave cylinder 28 (hereinafter, also referred to as “target hydraulic pressure”) for engaging and disengaging the clutch device 26 based on a preset calculation program. The ECU 60 controls the clutch control unit 50A so that the oil pressure on the slave cylinder 28 side (slave oil pressure) detected by the downstream oil pressure sensor 58 approaches the target oil pressure.
ECU60は、予め設定された演算プログラムに基づいて、クラッチ装置26を断接するためにスレーブシリンダ28に供給する油圧の目標値(以下「目標油圧」ともいう。)を演算する。ECU60は、下流側油圧センサ58で検出されるスレーブシリンダ28側の油圧(スレーブ油圧)が目標油圧に近づくように、クラッチ制御ユニット50Aを制御する。 With reference to FIG. 3, the
The
マスターシリンダ51は、シリンダ本体51a内のピストン51bをモータ52の駆動によりストロークさせて、シリンダ本体51a内の作動油をスレーブシリンダ28に対して給排可能とする。図中符号55はボールネジ機構としての変換機構、符号54はモータ52および変換機構55に跨る伝達機構、符号51eはマスターシリンダ51に接続されるリザーバをそれぞれ示す。
The master cylinder 51 strokes the piston 51b in the cylinder body 51a by driving the motor 52 so that the hydraulic oil in the cylinder body 51a can be supplied and discharged to the slave cylinder 28. In the figure, reference numeral 55 indicates a conversion mechanism as a ball screw mechanism, reference numeral 54 indicates a transmission mechanism straddling the motor 52 and the conversion mechanism 55, and reference numeral 51e indicates a reservoir connected to the master cylinder 51.
油圧回路装置53は、マスターシリンダ51からクラッチ装置26側(スレーブシリンダ28側)へ延びる主油路(油圧給排油路)53mの中間部位を開通又は遮断するバルブ機構(ソレノイドバルブ56)を有している。油圧回路装置53の主油路53mは、ソレノイドバルブ56よりもマスターシリンダ51側となる上流側油路53aと、ソレノイドバルブ56よりもスレーブシリンダ28側となる下流側油路53bと、に分けられる。油圧回路装置53はさらに、ソレノイドバルブ56を迂回して上流側油路53aと下流側油路53bとを連通するバイパス油路53cを備えている。
The hydraulic circuit device 53 has a valve mechanism (solenoid valve 56) that opens or shuts off an intermediate portion of a main oil passage (hydraulic oil supply / exhaust passage) 53 m extending from the master cylinder 51 to the clutch device 26 side (slave cylinder 28 side). are doing. The main oil passage 53m of the hydraulic circuit device 53 is divided into an upstream oil passage 53a on the master cylinder 51 side of the solenoid valve 56 and a downstream oil passage 53b on the slave cylinder 28 side of the solenoid valve 56. .. The hydraulic circuit device 53 further includes a bypass oil passage 53c that bypasses the solenoid valve 56 and connects the upstream oil passage 53a and the downstream oil passage 53b.
ソレノイドバルブ56は、いわゆるノーマルオープンバルブである。バイパス油路53cには、上流側から下流側への方向のみ作動油を流通させるワンウェイバルブ53c1が設けられている。ソレノイドバルブ56の上流側には、上流側油路53aの油圧を検出する上流側油圧センサ57が設けられている。ソレノイドバルブ56の下流側には、下流側油路53bの油圧を検出する下流側油圧センサ58が設けられている。
The solenoid valve 56 is a so-called normally open valve. The bypass oil passage 53c is provided with a one-way valve 53c1 that allows hydraulic oil to flow only in the direction from the upstream side to the downstream side. On the upstream side of the solenoid valve 56, an upstream oil pressure sensor 57 for detecting the oil pressure of the upstream oil passage 53a is provided. On the downstream side of the solenoid valve 56, a downstream oil pressure sensor 58 for detecting the oil pressure of the downstream oil passage 53b is provided.
図1に示すように、クラッチ制御ユニット50Aは、例えばリヤカウル9a内に収容されている。スレーブシリンダ28は、クランクケース15の後部左側に取り付けられている。クラッチ制御ユニット50Aとスレーブシリンダ28とは、油圧配管53e(図3参照)を介して接続されている。
As shown in FIG. 1, the clutch control unit 50A is housed in, for example, the rear cowl 9a. The slave cylinder 28 is attached to the rear left side of the crankcase 15. The clutch control unit 50A and the slave cylinder 28 are connected via a hydraulic pipe 53e (see FIG. 3).
図2に示すように、スレーブシリンダ28は、メインシャフト22の左方に同軸配置されている。スレーブシリンダ28は、クラッチアクチュエータ50からの油圧供給時には、メインシャフト22内を貫通するプッシュロッド28aを右方へ押圧する。スレーブシリンダ28は、プッシュロッド28aを右方へ押圧することで、該プッシュロッド28aを介してクラッチ装置26を接続状態へ作動させる。スレーブシリンダ28は、前記油圧供給が無くなると、プッシュロッド28aの押圧を解除し、クラッチ装置26を切断状態に戻す。
As shown in FIG. 2, the slave cylinder 28 is coaxially arranged on the left side of the main shaft 22. The slave cylinder 28 presses the push rod 28a penetrating the inside of the main shaft 22 to the right when the hydraulic pressure is supplied from the clutch actuator 50. By pressing the push rod 28a to the right, the slave cylinder 28 operates the clutch device 26 in the connected state via the push rod 28a. When the hydraulic pressure supply is cut off, the slave cylinder 28 releases the pressure on the push rod 28a and returns the clutch device 26 to the disengaged state.
クラッチ装置26を接続状態に維持するには油圧供給を継続する必要があるが、その分だけ電力を消費することとなる。そこで、図3に示すように、クラッチ制御ユニット50Aの油圧回路装置53にソレノイドバルブ56を設け、クラッチ装置26側への油圧供給後にソレノイドバルブ56を閉じている。これにより、クラッチ装置26側への供給油圧を維持し、圧力低下分だけ油圧を補う(リーク分だけリチャージする)構成として、エネルギー消費を抑えている。
In order to maintain the clutch device 26 in the connected state, it is necessary to continue the hydraulic pressure supply, but power is consumed by that amount. Therefore, as shown in FIG. 3, a solenoid valve 56 is provided in the hydraulic circuit device 53 of the clutch control unit 50A, and the solenoid valve 56 is closed after supplying hydraulic pressure to the clutch device 26 side. As a result, the supply hydraulic pressure to the clutch device 26 side is maintained, and the hydraulic pressure is supplemented by the pressure drop (recharges by the leak amount) to suppress energy consumption.
<クラッチ制御>
次に、クラッチ制御系の作用について図5のグラフを参照して説明する。図5のグラフにおいて、縦軸は下流側油圧センサ58が検出する供給油圧、横軸は経過時間をそれぞれ示す。
自動二輪車1の停車時(アイドリング時)、ECU60で制御されるモータ52およびソレノイドバルブ56は、ともに電力供給が遮断された状態にある。すなわち、モータ52は停止状態にあり、ソレノイドバルブ56は開弁状態にある。このとき、スレーブシリンダ28側(下流側)はタッチポイント油圧TPより低い低圧状態となり、クラッチ装置26は非締結状態(切断状態、解放状態)となる。この状態は図5の領域Aに相当する。 <Clutch control>
Next, the operation of the clutch control system will be described with reference to the graph of FIG. In the graph of FIG. 5, the vertical axis represents the supply oil pressure detected by the downstreamhydraulic pressure sensor 58, and the horizontal axis represents the elapsed time.
When themotorcycle 1 is stopped (idling), both the motor 52 and the solenoid valve 56 controlled by the ECU 60 are in a state where the power supply is cut off. That is, the motor 52 is in the stopped state, and the solenoid valve 56 is in the open state. At this time, the slave cylinder 28 side (downstream side) is in a low pressure state lower than the touch point hydraulic pressure TP, and the clutch device 26 is in a non-engaged state (disengaged state, released state). This state corresponds to region A in FIG.
次に、クラッチ制御系の作用について図5のグラフを参照して説明する。図5のグラフにおいて、縦軸は下流側油圧センサ58が検出する供給油圧、横軸は経過時間をそれぞれ示す。
自動二輪車1の停車時(アイドリング時)、ECU60で制御されるモータ52およびソレノイドバルブ56は、ともに電力供給が遮断された状態にある。すなわち、モータ52は停止状態にあり、ソレノイドバルブ56は開弁状態にある。このとき、スレーブシリンダ28側(下流側)はタッチポイント油圧TPより低い低圧状態となり、クラッチ装置26は非締結状態(切断状態、解放状態)となる。この状態は図5の領域Aに相当する。 <Clutch control>
Next, the operation of the clutch control system will be described with reference to the graph of FIG. In the graph of FIG. 5, the vertical axis represents the supply oil pressure detected by the downstream
When the
自動二輪車1の発進時、エンジン13の回転数を上昇させると、モータ52にのみ電力供給がなされ、マスターシリンダ51から開弁状態のソレノイドバルブ56を経てスレーブシリンダ28へ油圧が供給される。スレーブシリンダ28側(下流側)の油圧がタッチポイント油圧TP以上に上昇すると、クラッチ装置26の締結が開始され、クラッチ装置26が一部の動力を伝達可能な半クラッチ状態となる。これにより、自動二輪車1の滑らかな発進が可能となる。この状態は図5の領域Bに相当する。
やがて、クラッチ装置26の入力回転と出力回転との差が縮まり、スレーブシリンダ28側(下流側)の油圧が下限保持油圧LPに達すると、クラッチ装置26の締結が完了し、エンジン13の駆動力が全て変速機21に伝達される。この状態は、図5の領域Cに相当する。 When the number of revolutions of theengine 13 is increased when the motorcycle 1 is started, electric power is supplied only to the motor 52, and hydraulic pressure is supplied from the master cylinder 51 to the slave cylinder 28 via the solenoid valve 56 in the valve open state. When the hydraulic pressure on the slave cylinder 28 side (downstream side) rises above the touch point hydraulic pressure TP, the clutch device 26 is started to be engaged, and the clutch device 26 is in a half-clutch state capable of transmitting a part of the power. As a result, the motorcycle 1 can start smoothly. This state corresponds to region B in FIG.
Eventually, when the difference between the input rotation and the output rotation of theclutch device 26 is reduced and the hydraulic pressure on the slave cylinder 28 side (downstream side) reaches the lower limit holding hydraulic pressure LP, the engagement of the clutch device 26 is completed and the driving force of the engine 13 is completed. Are all transmitted to the transmission 21. This state corresponds to region C in FIG.
やがて、クラッチ装置26の入力回転と出力回転との差が縮まり、スレーブシリンダ28側(下流側)の油圧が下限保持油圧LPに達すると、クラッチ装置26の締結が完了し、エンジン13の駆動力が全て変速機21に伝達される。この状態は、図5の領域Cに相当する。 When the number of revolutions of the
Eventually, when the difference between the input rotation and the output rotation of the
マスターシリンダ51側からスレーブシリンダ28側に油圧を供給する際には、ソレノイドバルブ56を開弁状態とし、モータ52に通電して正転駆動させて、マスターシリンダ51を加圧する。これにより、スレーブシリンダ28側の油圧がクラッチ締結油圧に調圧される。このとき、クラッチアクチュエータ50の駆動は、下流側油圧センサ58の検出油圧に基づきフィードバック制御される。
When supplying hydraulic pressure from the master cylinder 51 side to the slave cylinder 28 side, the solenoid valve 56 is opened, the motor 52 is energized to drive the motor 52 in the forward rotation, and the master cylinder 51 is pressurized. As a result, the hydraulic pressure on the slave cylinder 28 side is adjusted to the clutch engagement hydraulic pressure. At this time, the drive of the clutch actuator 50 is feedback-controlled based on the detected hydraulic pressure of the downstream hydraulic pressure sensor 58.
そして、スレーブシリンダ28側(下流側)の油圧が上限保持油圧HPに達すると、ソレノイドバルブ56に電力供給がなされてソレノイドバルブ56が閉弁作動するとともに、モータ52への電力供給が停止されて油圧の発生が停止される。すなわち、上流側は油圧が解放して低圧状態となる一方、下流側は高圧状態(上限保持油圧HP)に維持される。これにより、マスターシリンダ51が油圧を発生することなくクラッチ装置26が締結状態に維持され、自動二輪車1の走行を可能とした上で電力消費を抑えることができる。
When the hydraulic pressure on the slave cylinder 28 side (downstream side) reaches the upper limit holding hydraulic pressure HP, power is supplied to the solenoid valve 56 to close the solenoid valve 56, and the power supply to the motor 52 is stopped. The generation of hydraulic pressure is stopped. That is, the hydraulic pressure on the upstream side is released to a low pressure state, while the downstream side is maintained in a high pressure state (upper limit holding hydraulic pressure HP). As a result, the clutch device 26 is maintained in the engaged state without generating hydraulic pressure in the master cylinder 51, enabling the motorcycle 1 to travel and suppressing power consumption.
ソレノイドバルブ56を閉弁した状態でも、ソレノイドバルブ56およびワンウェイバルブ53c1のシールの変形等による油圧漏れや温度低下といった要因により、図5の領域Dのように、下流側の油圧は徐々に低下(リーク)する。一方、図5の領域Eのように、温度上昇等により下流側の油圧が上昇する場合もある。下流側の細かな油圧変動であれば、アキュムレータ(不図示)により吸収可能であり、油圧変動の度にモータ52およびソレノイドバルブ56を作動させて電力消費を増やすことはない。
図5の領域Eのように、下流側の油圧が上限保持油圧HPまで上昇した場合、ソレノイドバルブ56への電力供給を低下させる等により、ソレノイドバルブ56を段階的に開弁状態として、下流側の油圧を上流側へリリーフする。 Even when thesolenoid valve 56 is closed, the hydraulic pressure on the downstream side gradually decreases (as shown in region D in FIG. 5) due to factors such as hydraulic pressure leakage and temperature decrease due to deformation of the seals of the solenoid valve 56 and the one-way valve 53c1. Leak). On the other hand, as in region E in FIG. 5, the hydraulic pressure on the downstream side may rise due to a temperature rise or the like. If the hydraulic pressure fluctuates on the downstream side, it can be absorbed by an accumulator (not shown), and the motor 52 and the solenoid valve 56 are not operated every time the hydraulic pressure fluctuates to increase the power consumption.
When the hydraulic pressure on the downstream side rises to the upper limit holding hydraulic pressure HP as in region E of FIG. 5, thesolenoid valve 56 is gradually opened to the downstream side by reducing the power supply to the solenoid valve 56 or the like. Relieves the hydraulic pressure of the valve to the upstream side.
図5の領域Eのように、下流側の油圧が上限保持油圧HPまで上昇した場合、ソレノイドバルブ56への電力供給を低下させる等により、ソレノイドバルブ56を段階的に開弁状態として、下流側の油圧を上流側へリリーフする。 Even when the
When the hydraulic pressure on the downstream side rises to the upper limit holding hydraulic pressure HP as in region E of FIG. 5, the
図5の領域Fのように、下流側の油圧が下限保持油圧LPまで低下した場合、ソレノイドバルブ56は閉弁したままでモータ52への電力供給を開始し、上流側の油圧を上昇させる。上流側の油圧が下流側の油圧を上回ると、この油圧がバイパス油路53cおよびワンウェイバルブ53c1を介して下流側に補給(リチャージ)される。下流側の油圧が上限保持油圧HPになると、モータ52への電力供給を停止して油圧の発生を停止する。これにより、下流側の油圧は上限保持油圧HPと下限保持油圧LPとの間に維持され、クラッチ装置26が締結状態に維持される。
When the hydraulic pressure on the downstream side drops to the lower limit holding hydraulic pressure LP as in region F in FIG. 5, the solenoid valve 56 starts supplying power to the motor 52 while the valve is closed, and raises the hydraulic pressure on the upstream side. When the hydraulic pressure on the upstream side exceeds the hydraulic pressure on the downstream side, this hydraulic pressure is recharged to the downstream side via the bypass oil passage 53c and the one-way valve 53c1. When the hydraulic pressure on the downstream side reaches the upper limit holding hydraulic pressure HP, the power supply to the motor 52 is stopped to stop the generation of hydraulic pressure. As a result, the hydraulic pressure on the downstream side is maintained between the upper limit holding hydraulic pressure HP and the lower limit holding hydraulic pressure LP, and the clutch device 26 is maintained in the engaged state.
自動二輪車1の停止時には、モータ52およびソレノイドバルブ56への電力供給をともに停止する。これにより、マスターシリンダ51は油圧発生を停止し、スレーブシリンダ28への油圧供給を停止する。ソレノイドバルブ56は開弁状態となり、下流側油路53b内の油圧がリザーバ51eに戻される。以上により、スレーブシリンダ28側(下流側)はタッチポイント油圧TPより低い低圧状態となり、クラッチ装置26が非締結状態となる。この状態は、図5の領域G,Hに相当する。
When the motorcycle 1 is stopped, both the power supply to the motor 52 and the solenoid valve 56 is stopped. As a result, the master cylinder 51 stops generating hydraulic pressure and stops supplying hydraulic pressure to the slave cylinder 28. The solenoid valve 56 is opened, and the hydraulic pressure in the downstream oil passage 53b is returned to the reservoir 51e. As a result, the slave cylinder 28 side (downstream side) is in a low pressure state lower than the touch point hydraulic pressure TP, and the clutch device 26 is in a non-engaged state. This state corresponds to the regions G and H in FIG.
<クラッチ制御モード>
図6に示すように、本実施形態のクラッチ制御装置60Aは、三種のクラッチ制御モードを有している。クラッチ制御モードは、自動制御を行うオートモードM1、手動操作を行うマニュアルモードM2、および一時的な手動操作を行うマニュアル介入モードM3、の三種のモード間で、クラッチ制御モード切替スイッチ59(図4参照)およびクラッチレバー4b(図1参照)の操作に応じて適宜遷移する。なお、マニュアルモードM2およびマニュアル介入モードM3を含む対象をマニュアル系M2Aという。クラッチ制御装置60Aは、クラッチレバー4bとクラッチ装置26とを電気的に接続したクラッチバイワイヤシステムとしても機能する。 <Clutch control mode>
As shown in FIG. 6, theclutch control device 60A of the present embodiment has three types of clutch control modes. The clutch control mode is a clutch control mode changeover switch 59 (FIG. 4) between three modes: an auto mode M1 for automatic control, a manual mode M2 for manual operation, and a manual intervention mode M3 for temporary manual operation. (See) and the clutch lever 4b (see FIG. 1) are operated to make appropriate transitions. The target including the manual mode M2 and the manual intervention mode M3 is referred to as a manual system M2A. The clutch control device 60A also functions as a clutch-by-wire system in which the clutch lever 4b and the clutch device 26 are electrically connected.
図6に示すように、本実施形態のクラッチ制御装置60Aは、三種のクラッチ制御モードを有している。クラッチ制御モードは、自動制御を行うオートモードM1、手動操作を行うマニュアルモードM2、および一時的な手動操作を行うマニュアル介入モードM3、の三種のモード間で、クラッチ制御モード切替スイッチ59(図4参照)およびクラッチレバー4b(図1参照)の操作に応じて適宜遷移する。なお、マニュアルモードM2およびマニュアル介入モードM3を含む対象をマニュアル系M2Aという。クラッチ制御装置60Aは、クラッチレバー4bとクラッチ装置26とを電気的に接続したクラッチバイワイヤシステムとしても機能する。 <Clutch control mode>
As shown in FIG. 6, the
オートモードM1は、自動発進・変速制御により走行状態に適したクラッチ容量を演算してクラッチ装置26を制御するモードである。マニュアルモードM2は、乗員によるクラッチ操作指示に応じてクラッチ容量を演算してクラッチ装置26を制御するモードである。マニュアル介入モードM3は、オートモードM1中に乗員からのクラッチ操作指示を受け付け、クラッチ操作指示からクラッチ容量を演算してクラッチ装置26を制御する一時的なマニュアル操作モードである。なお、マニュアル介入モードM3中に乗員がクラッチレバー4bの操作をやめる(完全にリリースする)と、オートモードM1に戻るよう設定されている。
The auto mode M1 is a mode in which the clutch device 26 is controlled by calculating the clutch capacity suitable for the running state by automatic start / shift control. The manual mode M2 is a mode in which the clutch capacity is calculated in response to a clutch operation instruction by the occupant to control the clutch device 26. The manual intervention mode M3 is a temporary manual operation mode in which the clutch operation instruction from the occupant is received during the auto mode M1, the clutch capacity is calculated from the clutch operation instruction, and the clutch device 26 is controlled. It is set to return to the auto mode M1 when the occupant stops (completely releases) the operation of the clutch lever 4b during the manual intervention mode M3.
本実施形態のクラッチ制御装置60Aは、モータを駆動してクラッチ制御油圧を発生させ、システム起動時には、オートモードM1でクラッチオフの状態(切断状態)から制御を始める。また、クラッチ制御装置60Aは、エンジン13停止時にはクラッチ操作が不要なので、オートモードM1でクラッチオフに戻るよう設定されている。
The clutch control device 60A of the present embodiment drives a motor to generate clutch control hydraulic pressure, and when the system is started, control is started from a clutch-off state (disengaged state) in auto mode M1. Further, the clutch control device 60A is set to return to the clutch off in the auto mode M1 because the clutch operation is not required when the engine 13 is stopped.
オートモードM1は、クラッチ制御を自動で行うことが基本であり、レバー操作レスで自動二輪車1を走行可能とする。オートモードM1では、スロットル開度、エンジン回転数、車速およびシフトセンサ出力により、クラッチ容量をコントロールしている。これにより、自動二輪車1をスロットル操作のみでエンストすることなく発進可能であり、かつシフト操作のみで変速可能である。ただし、アイドリング相当の極低速時には自動でクラッチ装置26が切断することがある。また、オートモードM1では、クラッチレバー4bを握ることでマニュアル介入モードM3となり、クラッチ装置26を任意に切ることも可能である。
The auto mode M1 basically performs clutch control automatically, and enables the motorcycle 1 to run without lever operation. In the auto mode M1, the clutch capacity is controlled by the throttle opening, the engine speed, the vehicle speed, and the shift sensor output. As a result, the motorcycle 1 can be started without being stalled only by the throttle operation, and the speed can be changed only by the shift operation. However, the clutch device 26 may be automatically disengaged at an extremely low speed equivalent to idling. Further, in the auto mode M1, the manual intervention mode M3 is set by grasping the clutch lever 4b, and the clutch device 26 can be arbitrarily disengaged.
一方、マニュアルモードM2では、乗員によるレバー操作により、クラッチ容量をコントロールする。オートモードM1とマニュアルモードM2とは、停車中にクラッチ制御モード切替スイッチ59(図4参照)を操作することで切り替え可能である。なお、クラッチ制御装置60Aは、マニュアル系M2A(マニュアルモードM2又はマニュアル介入モードM3)への遷移時にレバー操作が有効であることを示すインジケータを備えてもよい。
On the other hand, in the manual mode M2, the clutch capacity is controlled by the lever operation by the occupant. The auto mode M1 and the manual mode M2 can be switched by operating the clutch control mode changeover switch 59 (see FIG. 4) while the vehicle is stopped. The clutch control device 60A may include an indicator indicating that the lever operation is effective at the time of transition to the manual system M2A (manual mode M2 or manual intervention mode M3).
マニュアルモードM2は、クラッチ制御を手動で行うことが基本であり、クラッチレバー4bの作動角度に応じてクラッチ油圧を制御可能である。これにより、乗員の意思のままにクラッチ装置26の断接をコントロール可能であり、かつアイドリング相当の極低速時にもクラッチ装置26を接続して走行可能である。ただし、レバー操作によってはエンストすることがあり、かつスロットル操作のみでの自動発進も不可である。なお、マニュアルモードM2であっても、シフト操作時にはクラッチ制御が自動で介入する。
In the manual mode M2, the clutch is basically controlled manually, and the clutch hydraulic pressure can be controlled according to the operating angle of the clutch lever 4b. As a result, the engagement and disengagement of the clutch device 26 can be controlled at the will of the occupant, and the clutch device 26 can be connected and traveled even at an extremely low speed equivalent to idling. However, depending on the lever operation, the engine may stall, and automatic starting is not possible only by operating the throttle. Even in the manual mode M2, the clutch control automatically intervenes during the shift operation.
オートモードM1では、クラッチアクチュエータ50により自動でクラッチ装置26の断接が行われる。オートモードM1では、クラッチレバー4bに対するマニュアルクラッチ操作が行われることで、クラッチ装置26の自動制御に一時的に手動操作を介入させることが可能である(マニュアル介入モードM3)。
In the auto mode M1, the clutch actuator 50 automatically engages and disconnects the clutch device 26. In the auto mode M1, the manual clutch operation is performed on the clutch lever 4b, so that the manual operation can be temporarily intervened in the automatic control of the clutch device 26 (manual intervention mode M3).
<登り坂停車中の油圧保持の切り替え制御>
次に、本実施形態の自動二輪車のクラッチ装置の油圧保持の切り替え制御について説明する。
本実施形態では、アクチュエータ保持制御を維持したまま所定時間経過した後、クラッチ装置26(スレーブシリンダ28側)の油圧保持の制御をアクチュエータ保持制御からバルブ保持制御に切り替える。 <Control of switching hydraulic pressure retention while stopped uphill>
Next, the hydraulic pressure holding switching control of the clutch device of the motorcycle of the present embodiment will be described.
In the present embodiment, after a predetermined time has elapsed while maintaining the actuator holding control, the control of hydraulic pressure holding of the clutch device 26 (slave cylinder 28 side) is switched from the actuator holding control to the valve holding control.
次に、本実施形態の自動二輪車のクラッチ装置の油圧保持の切り替え制御について説明する。
本実施形態では、アクチュエータ保持制御を維持したまま所定時間経過した後、クラッチ装置26(スレーブシリンダ28側)の油圧保持の制御をアクチュエータ保持制御からバルブ保持制御に切り替える。 <Control of switching hydraulic pressure retention while stopped uphill>
Next, the hydraulic pressure holding switching control of the clutch device of the motorcycle of the present embodiment will be described.
In the present embodiment, after a predetermined time has elapsed while maintaining the actuator holding control, the control of hydraulic pressure holding of the clutch device 26 (
図7は、実施形態の自動二輪車の登り坂停車中の車体状況の説明図である。
登り坂停車は、車両を登り坂で停止することを意味する。例えば、登り坂停車は、フロントブレーキおよびリアブレーキの少なくとも一方をかけることにより停止する場合だけでなく、半クラッチを利用して車両が下がらない程度にクリープ現象(エンジンがアイドリング状態で車両が動く現象)を発生させて停止する場合も含まれる。 FIG. 7 is an explanatory diagram of a vehicle body condition while the motorcycle of the embodiment is stopped uphill.
An uphill stop means stopping the vehicle on an uphill. For example, an uphill stop is not only when the vehicle is stopped by applying at least one of the front brake and the rear brake, but also a creep phenomenon (a phenomenon in which the vehicle moves while the engine is idling) to the extent that the vehicle does not lower using a half-clutch. ) Is generated and stopped.
登り坂停車は、車両を登り坂で停止することを意味する。例えば、登り坂停車は、フロントブレーキおよびリアブレーキの少なくとも一方をかけることにより停止する場合だけでなく、半クラッチを利用して車両が下がらない程度にクリープ現象(エンジンがアイドリング状態で車両が動く現象)を発生させて停止する場合も含まれる。 FIG. 7 is an explanatory diagram of a vehicle body condition while the motorcycle of the embodiment is stopped uphill.
An uphill stop means stopping the vehicle on an uphill. For example, an uphill stop is not only when the vehicle is stopped by applying at least one of the front brake and the rear brake, but also a creep phenomenon (a phenomenon in which the vehicle moves while the engine is idling) to the extent that the vehicle does not lower using a half-clutch. ) Is generated and stopped.
図中において、符号49は車両が登り坂停車中の車体状況(以下「登り坂状況」ともいう。)であることを検知するためのIMU(慣性計測装置)、符号44fは前輪2の回転速度(以下「前車輪速」ともいう。)を検出する前車輪速センサ、符号44rは後輪12の回転加速度(以下「後輪加速度」ともいう。)を検出するための後車輪速センサをそれぞれ示す。ECU60は、IMU49の検知結果に基づいて停車位置を維持するための必要な油圧を算出する。ECU60は、アクチュエータ保持制御(図8参照)とバルブ保持制御(図9参照)とを切り替え可能である。
In the figure, reference numeral 49 is an IMU (inertial measurement unit) for detecting that the vehicle is in a vehicle body condition (hereinafter, also referred to as “uphill condition”) while the vehicle is stopped on an uphill, and reference numeral 44f is a rotational speed of the front wheel 2. The front wheel speed sensor for detecting (hereinafter, also referred to as "front wheel speed"), and the reference numeral 44r are rear wheel speed sensors for detecting the rotational acceleration of the rear wheels 12 (hereinafter, also referred to as "rear wheel acceleration"). Shown. The ECU 60 calculates the oil pressure required to maintain the stopped position based on the detection result of the IMU 49. The ECU 60 can switch between actuator holding control (see FIG. 8) and valve holding control (see FIG. 9).
図8は、実施形態のアクチュエータ保持制御の説明図である。
アクチュエータ保持制御は、クラッチアクチュエータ50(アクチュエータ)の駆動を継続することによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する制御を意味する。ECU60は、ソレノイドバルブ56を開弁状態とし、モータ52に通電してマスターシリンダ51を加圧することにより、マスターシリンダ51側からスレーブシリンダ28側に油圧を供給する。ECU60は、アクチュエータ保持制御を実行する場合、モータ52の通電を継続することによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する。図8において、ハッチ部は、アクチュエータ保持制御により所定の油圧が作用している油路を示す。 FIG. 8 is an explanatory diagram of the actuator holding control of the embodiment.
The actuator holding control means a control for holding the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by continuing to drive the clutch actuator 50 (actuator). The ECU 60 opens the solenoid valve 56 and energizes the motor 52 to pressurize the master cylinder 51, thereby supplying hydraulic pressure from the master cylinder 51 side to the slave cylinder 28 side. When executing the actuator holding control, the ECU 60 holds the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by continuing to energize the motor 52. In FIG. 8, the hatch portion shows an oil passage in which a predetermined hydraulic pressure is applied by actuator holding control.
アクチュエータ保持制御は、クラッチアクチュエータ50(アクチュエータ)の駆動を継続することによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する制御を意味する。ECU60は、ソレノイドバルブ56を開弁状態とし、モータ52に通電してマスターシリンダ51を加圧することにより、マスターシリンダ51側からスレーブシリンダ28側に油圧を供給する。ECU60は、アクチュエータ保持制御を実行する場合、モータ52の通電を継続することによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する。図8において、ハッチ部は、アクチュエータ保持制御により所定の油圧が作用している油路を示す。 FIG. 8 is an explanatory diagram of the actuator holding control of the embodiment.
The actuator holding control means a control for holding the hydraulic pressure supplied to the clutch device 26 (
図9は、実施形態のバルブ保持制御の説明図である。
バルブ保持制御は、クラッチアクチュエータ50の駆動後にソレノイドバルブ56を閉弁状態とすることによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する制御を意味する。ECU60は、ソレノイドバルブ56に電力を供給してソレノイドバルブ56を閉弁作動とし、モータ52への電力供給を停止して油圧の発生を停止する。ECU60は、バルブ保持制御を実行する場合、ソレノイドバルブ56を閉弁状態とし、モータ52の通電を停止することによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する。図9において、ハッチ部は、バルブ保持制御により所定の油圧が作用している油路を示す。 FIG. 9 is an explanatory diagram of the valve holding control of the embodiment.
The valve holding control means a control for holding the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by closing the solenoid valve 56 after driving the clutch actuator 50. The ECU 60 supplies electric power to the solenoid valve 56 to close the solenoid valve 56, stops the electric power supply to the motor 52, and stops the generation of hydraulic pressure. When executing the valve holding control, the ECU 60 keeps the hydraulic pressure supplied to the clutch device 26 (slave cylinder 28 side) by closing the solenoid valve 56 and stopping the energization of the motor 52. In FIG. 9, the hatch portion shows an oil passage in which a predetermined hydraulic pressure is applied by valve holding control.
バルブ保持制御は、クラッチアクチュエータ50の駆動後にソレノイドバルブ56を閉弁状態とすることによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する制御を意味する。ECU60は、ソレノイドバルブ56に電力を供給してソレノイドバルブ56を閉弁作動とし、モータ52への電力供給を停止して油圧の発生を停止する。ECU60は、バルブ保持制御を実行する場合、ソレノイドバルブ56を閉弁状態とし、モータ52の通電を停止することによりクラッチ装置26(スレーブシリンダ28側)に供給される油圧を保持する。図9において、ハッチ部は、バルブ保持制御により所定の油圧が作用している油路を示す。 FIG. 9 is an explanatory diagram of the valve holding control of the embodiment.
The valve holding control means a control for holding the hydraulic pressure supplied to the clutch device 26 (
図10を参照し、アクチュエータ保持制御とバルブ保持制御との切り替え制御の一例について説明する。
まず、ステップS1において、ECU60は、車両が登り坂停車中であるか否か(車両が登り坂状況であるか否か)を判定する。例えば、車両が登り坂停車中であるか否かは、IMU検知結果(例えば登り坂の傾斜角度)が閾値以上であるか否かにより判定する。ステップS1でYES(IMU検知結果が閾値以上)の場合(車両が登り坂停車中である場合)、ステップS2に移行する。ステップS1でNO(IMU検知結果が閾値未満)の場合(車両が登り坂停車中ではない場合)、ステップS6に移行する。 An example of switching control between the actuator holding control and the valve holding control will be described with reference to FIG.
First, in step S1, theECU 60 determines whether or not the vehicle is stopped on an uphill (whether or not the vehicle is on an uphill condition). For example, whether or not the vehicle is stopped on an uphill is determined by whether or not the IMU detection result (for example, the inclination angle of the uphill) is equal to or greater than the threshold value. If YES in step S1 (the IMU detection result is equal to or greater than the threshold value) (when the vehicle is stopped uphill), the process proceeds to step S2. If NO (the IMU detection result is less than the threshold value) in step S1 (when the vehicle is not stopped uphill), the process proceeds to step S6.
まず、ステップS1において、ECU60は、車両が登り坂停車中であるか否か(車両が登り坂状況であるか否か)を判定する。例えば、車両が登り坂停車中であるか否かは、IMU検知結果(例えば登り坂の傾斜角度)が閾値以上であるか否かにより判定する。ステップS1でYES(IMU検知結果が閾値以上)の場合(車両が登り坂停車中である場合)、ステップS2に移行する。ステップS1でNO(IMU検知結果が閾値未満)の場合(車両が登り坂停車中ではない場合)、ステップS6に移行する。 An example of switching control between the actuator holding control and the valve holding control will be described with reference to FIG.
First, in step S1, the
ステップS2において、ECU60は、登り坂状況(例えば登り坂の傾斜角度、車両重量、乗員重量、サスペンションの状態など)に応じて半クラッチにより停車位置を維持するために必要な油圧(以下「停車位置必要油圧」ともいう。)を算出する。すなわち、ECU60は、車両が登り坂停車中であることを検知した場合、停車位置必要油圧を算出する。ステップS2の後、ステップS3に移行する。
In step S2, the ECU 60 has the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition (for example, the uphill inclination angle, vehicle weight, occupant weight, suspension state, etc.) (hereinafter, “stop position”). Also called "required hydraulic pressure") is calculated. That is, when the ECU 60 detects that the vehicle is stopped uphill, the ECU 60 calculates the required hydraulic pressure for the stop position. After step S2, the process proceeds to step S3.
ステップS3において、ECU60は、タイマカウントを行う。例えば、ECU60は、ステップS1でYES(車両が登り坂停車中である)と判定されてから停車位置必要油圧算出後の経過時間を計算する。ステップS3の後、ステップS4に移行する。
In step S3, the ECU 60 counts the timer. For example, the ECU 60 calculates the elapsed time after the calculation of the required hydraulic pressure at the stop position after the determination of YES (the vehicle is stopped uphill) in step S1. After step S3, the process proceeds to step S4.
ステップS4において、ECU60は、タイマ満了したか否かを判定する。ステップS4でYES(タイマ満了した)の場合、ステップS7に移行する。ステップS4でNO(タイマ満了していない)の場合、ステップS5に移行する。
In step S4, the ECU 60 determines whether or not the timer has expired. If YES (timer has expired) in step S4, the process proceeds to step S7. If NO (timer has not expired) in step S4, the process proceeds to step S5.
ステップS5において、ECU60は、アクチュエータ保持制御を実行する。すなわち、ECU60は、車両が登り坂停車中であることを検知した直後はアクチュエータ保持制御を実行する。
In step S5, the ECU 60 executes the actuator holding control. That is, the ECU 60 executes the actuator holding control immediately after detecting that the vehicle is stopped uphill.
ステップS7において、ECU60は、バルブ保持制御を実行する(バルブ保持制御を許可する)。すなわち、ECU60は、車両が登り坂停車中であることを検知し、所定時間経過後(例えば数秒以上経過後)にアクチュエータ保持制御からバルブ保持制御に切り替える。言い換えると、ECU60は、クリープ現象を発生させて停車している時間が所定時間よりも長くなった場合、モータ保護および消費電力低減のためにバルブ保持制御に切り替える。
In step S7, the ECU 60 executes valve holding control (allows valve holding control). That is, the ECU 60 detects that the vehicle is stopped uphill, and switches from the actuator holding control to the valve holding control after a lapse of a predetermined time (for example, after a lapse of several seconds or more). In other words, when the ECU 60 causes a creep phenomenon and the vehicle is stopped for a longer time than a predetermined time, the ECU 60 switches to valve holding control for motor protection and power consumption reduction.
ステップS6において、ECU60は、発進完了条件成立か否かを判定する。例えば、発進完了条件成立か否かは、後輪車速およびエンジン回転数が所定値以上であるか否かにより判定する。ステップS6でYES(後輪車速およびエンジン回転数が所定値以上)の場合(発進完了条件成立である場合)、ステップS7に移行する。ステップS6でNO(後輪車速およびエンジン回転数が所定値未満)の場合(発進完了条件成立ではない場合)、ステップS8に移行する。
In step S6, the ECU 60 determines whether or not the start completion condition is satisfied. For example, whether or not the start completion condition is satisfied is determined by whether or not the rear wheel vehicle speed and the engine speed are equal to or higher than a predetermined value. If YES (rear wheel vehicle speed and engine speed are equal to or higher than the predetermined values) in step S6 (when the start completion condition is satisfied), the process proceeds to step S7. If NO (rear wheel vehicle speed and engine speed are less than predetermined values) in step S6 (when the start completion condition is not satisfied), the process proceeds to step S8.
ステップS7において、ECU60は、バルブ保持制御を実行する。すなわち、ECU60は、車両の発進完了を検知した場合、アクチュエータ保持制御からバルブ保持制御に切り替える。
In step S7, the ECU 60 executes valve holding control. That is, when the ECU 60 detects that the vehicle has started, the ECU 60 switches from the actuator holding control to the valve holding control.
ステップS8において、ECU60は、アクチュエータ保持制御を実行する。すなわち、ECU60は、車両の発進完了を検知しない場合(依然として登り坂停車中である場合や車両が発進中である場合)、アクチュエータ保持制御を継続する。
In step S8, the ECU 60 executes the actuator holding control. That is, when the ECU 60 does not detect the completion of the start of the vehicle (when the vehicle is still stopped uphill or the vehicle is starting), the actuator holding control is continued.
以上説明したように、上記実施形態の自動二輪車1のクラッチ制御装置60Aは、ノーマルオープンタイプのクラッチ装置26と、クラッチ装置26に油圧を供給するクラッチアクチュエータ50と、クラッチアクチュエータ50とクラッチ装置26とを接続する主油路53m(油路)と、主油路53mに設けられ、主油路53mを連通させる開弁状態と主油路53mを閉鎖する閉弁状態とを切り替え可能なソレノイドバルブ56と、クラッチアクチュエータ50からクラッチ装置26への油圧の供給を許容し、クラッチ装置26からクラッチアクチュエータ50への油圧の供給を遮断するワンウェイバルブ53c1と、クラッチアクチュエータ50の駆動を継続することによりクラッチ装置26に供給される油圧を保持するアクチュエータ保持制御と、クラッチアクチュエータ50の駆動後にソレノイドバルブ56を閉弁状態とすることによりクラッチ装置26に供給される油圧を保持するバルブ保持制御と、を行うECU60と、を備え、ECU60は、アクチュエータ保持制御を維持したまま所定時間経過した場合、アクチュエータ保持制御からバルブ保持制御に切り替える。
この構成によれば、アクチュエータ保持制御を継続する場合と比較して、無駄な油圧の供給を減らすことができる。したがって、消費電力を低減することができる。 As described above, theclutch control device 60A of the motorcycle 1 of the above embodiment includes a normally open type clutch device 26, a clutch actuator 50 that supplies hydraulic pressure to the clutch device 26, and a clutch actuator 50 and a clutch device 26. A solenoid valve 56 that is provided in the main oil passage 53m and can switch between a valve open state in which the main oil passage 53m is communicated with the main oil passage 53m (oil passage) and a valve closed state in which the main oil passage 53m is closed. The one-way valve 53c1 that allows the supply of hydraulic pressure from the clutch actuator 50 to the clutch actuator 26 and shuts off the supply of hydraulic pressure from the clutch actuator 50 to the clutch actuator 50, and the clutch actuator by continuing to drive the clutch actuator 50. The ECU 60 performs actuator holding control for holding the hydraulic pressure supplied to 26 and valve holding control for holding the hydraulic pressure supplied to the clutch device 26 by closing the solenoid valve 56 after driving the clutch actuator 50. When a predetermined time elapses while maintaining the actuator holding control, the ECU 60 switches from the actuator holding control to the valve holding control.
According to this configuration, it is possible to reduce the unnecessary supply of hydraulic pressure as compared with the case where the actuator holding control is continued. Therefore, the power consumption can be reduced.
この構成によれば、アクチュエータ保持制御を継続する場合と比較して、無駄な油圧の供給を減らすことができる。したがって、消費電力を低減することができる。 As described above, the
According to this configuration, it is possible to reduce the unnecessary supply of hydraulic pressure as compared with the case where the actuator holding control is continued. Therefore, the power consumption can be reduced.
上記実施形態では、ECU60は、車両が登り坂状況であることを検知した場合、前記登り坂状況に応じて半クラッチにより停車位置を維持するために必要な油圧を算出することで、以下の効果を奏する。
車両が登り坂状況から発進するときに車両が下がることを抑制することができる。そのため、運転者の技量によらず安定した坂道発進が可能となる。 In the above embodiment, when theECU 60 detects that the vehicle is in an uphill condition, the ECU 60 calculates the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition, thereby achieving the following effects. Play.
It is possible to prevent the vehicle from descending when the vehicle starts from an uphill situation. Therefore, stable start on a slope is possible regardless of the skill of the driver.
車両が登り坂状況から発進するときに車両が下がることを抑制することができる。そのため、運転者の技量によらず安定した坂道発進が可能となる。 In the above embodiment, when the
It is possible to prevent the vehicle from descending when the vehicle starts from an uphill situation. Therefore, stable start on a slope is possible regardless of the skill of the driver.
上記実施形態では、車両が前記登り坂状況であることを検知するためのIMU49を更に備え、ECU60は、IMU49の検知結果に基づいて前記停車位置を維持するために必要な油圧を算出することで、以下の効果を奏する。
IMU49の検知結果に基づいた計算により、停車位置を維持するために必要な油圧を正確に算出することができる。 In the above embodiment, theIMU 49 for detecting that the vehicle is in the uphill condition is further provided, and the ECU 60 calculates the hydraulic pressure required to maintain the stopped position based on the detection result of the IMU 49. , Has the following effects.
The oil pressure required to maintain the stopped position can be accurately calculated by the calculation based on the detection result of the IMU49.
IMU49の検知結果に基づいた計算により、停車位置を維持するために必要な油圧を正確に算出することができる。 In the above embodiment, the
The oil pressure required to maintain the stopped position can be accurately calculated by the calculation based on the detection result of the IMU49.
<変形例>
上記実施形態では、ECU60は、車両が登り坂状況であることを検知してから所定時間経過後にアクチュエータ保持制御からバルブ保持制御に切り替える例を挙げて説明したが、これに限らない。例えば、ECU60は、車両が登り坂停車以外の車体状況であることを検知してから所定時間経過後にアクチュエータ保持制御からバルブ保持制御に切り替えてもよい。 <Modification example>
In the above embodiment, theECU 60 has been described with reference to an example of switching from the actuator holding control to the valve holding control after a lapse of a predetermined time after detecting that the vehicle is in an uphill condition, but the present invention is not limited to this. For example, the ECU 60 may switch from the actuator holding control to the valve holding control after a lapse of a predetermined time after detecting that the vehicle is in a vehicle body condition other than an uphill stop.
上記実施形態では、ECU60は、車両が登り坂状況であることを検知してから所定時間経過後にアクチュエータ保持制御からバルブ保持制御に切り替える例を挙げて説明したが、これに限らない。例えば、ECU60は、車両が登り坂停車以外の車体状況であることを検知してから所定時間経過後にアクチュエータ保持制御からバルブ保持制御に切り替えてもよい。 <Modification example>
In the above embodiment, the
上記実施形態では、ECU60は、車両が登り坂状況であることを検知した場合、前記登り坂状況に応じて半クラッチにより停車位置を維持するために必要な油圧を算出する例を挙げて説明したが、これに限らない。例えば、ECU60は、車両が登り坂状況であることを検知した場合、前記停車位置を維持するために必要な油圧を算出しなくてもよい。
In the above embodiment, when the ECU 60 detects that the vehicle is in an uphill condition, the ECU 60 gives an example of calculating the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition. However, it is not limited to this. For example, when the ECU 60 detects that the vehicle is in an uphill condition, it does not have to calculate the hydraulic pressure required to maintain the stopped position.
上記実施形態では、ECU60は、車両の発進を検知した場合、アクチュエータ保持制御からバルブ保持制御に切り替える例を挙げて説明したが、これに限らない。例えば、ECU60は、車両の発進を検知した後にアクチュエータ保持制御を継続してもよい。
In the above embodiment, when the ECU 60 detects the start of the vehicle, the actuator holding control is switched to the valve holding control, but the present invention is not limited to this. For example, the ECU 60 may continue the actuator holding control after detecting the start of the vehicle.
上記実施形態では、車両が前記登り坂状況であることを検知するためのIMU49を更に備える例を挙げて説明したが、これに限らない。例えば、車両はIMU49を備えていなくてもよい。
In the above embodiment, an example in which the IMU49 for detecting that the vehicle is in the uphill condition is further provided has been described, but the present invention is not limited to this. For example, the vehicle may not be equipped with the IMU49.
上記実施形態では、ECU60は、IMU49の検知結果に基づいて停車位置維持必要油圧を算出する例を挙げて説明したが、これに限らない。例えば、ECU60は、IMU49の検知結果以外のパラメータに基づいて停車位置維持必要油圧を算出してもよい。
In the above embodiment, the ECU 60 has been described with an example of calculating the hydraulic pressure required to maintain the stop position based on the detection result of the IMU49, but the present invention is not limited to this. For example, the ECU 60 may calculate the hydraulic pressure required to maintain the stop position based on parameters other than the detection result of the IMU 49.
なお、本発明は上記実施形態に限られるものではなく、例えば、前記鞍乗り型車両には、運転者が車体を跨いで乗車する車両全般が含まれ、自動二輪車(原動機付自転車及びスクータ型車両を含む)のみならず、三輪(前一輪かつ後二輪の他に、前二輪かつ後一輪の車両も含む)の車両も含まれる。また、本発明は、自動二輪車のみならず、自動車等の四輪の車両にも適用可能である。
そして、上記実施形態における構成は本発明の一例であり、実施形態の構成要素を周知の構成要素に置き換える等、本発明の要旨を逸脱しない範囲で種々の変更が可能である。 The present invention is not limited to the above embodiment. For example, the saddle-riding vehicle includes a general vehicle in which a driver straddles a vehicle body, and is a motorcycle (motorized bicycle and scooter-type vehicle). (Including), but also three-wheeled vehicles (including front two-wheeled and rear one-wheeled vehicles in addition to front one-wheeled and rear two-wheeled vehicles). Further, the present invention can be applied not only to motorcycles but also to four-wheeled vehicles such as automobiles.
The configuration in the above embodiment is an example of the present invention, and various modifications can be made without departing from the gist of the present invention, such as replacing the components of the embodiment with well-known components.
そして、上記実施形態における構成は本発明の一例であり、実施形態の構成要素を周知の構成要素に置き換える等、本発明の要旨を逸脱しない範囲で種々の変更が可能である。 The present invention is not limited to the above embodiment. For example, the saddle-riding vehicle includes a general vehicle in which a driver straddles a vehicle body, and is a motorcycle (motorized bicycle and scooter-type vehicle). (Including), but also three-wheeled vehicles (including front two-wheeled and rear one-wheeled vehicles in addition to front one-wheeled and rear two-wheeled vehicles). Further, the present invention can be applied not only to motorcycles but also to four-wheeled vehicles such as automobiles.
The configuration in the above embodiment is an example of the present invention, and various modifications can be made without departing from the gist of the present invention, such as replacing the components of the embodiment with well-known components.
1 自動二輪車(鞍乗り型車両)
26 クラッチ装置
50 クラッチアクチュエータ(アクチュエータ)
53 主油路(油路)
53c1 ワンウェイバルブ
56 ソレノイドバルブ(バルブ機構)
60 ECU(制御部)
60A クラッチ制御装置
49 IMU(慣性計測装置) 1 Motorcycle (saddle-riding vehicle)
26Clutch device 50 Clutch actuator (actuator)
53 Main oil channel (oil channel)
53c1 One-way valve 56 Solenoid valve (valve mechanism)
60 ECU (control unit)
60AClutch control device 49 IMU (Inertial measurement unit)
26 クラッチ装置
50 クラッチアクチュエータ(アクチュエータ)
53 主油路(油路)
53c1 ワンウェイバルブ
56 ソレノイドバルブ(バルブ機構)
60 ECU(制御部)
60A クラッチ制御装置
49 IMU(慣性計測装置) 1 Motorcycle (saddle-riding vehicle)
26
53 Main oil channel (oil channel)
53c1 One-
60 ECU (control unit)
60A
Claims (3)
- ノーマルオープンタイプのクラッチ装置(26)と、
前記クラッチ装置(26)に油圧を供給するアクチュエータ(50)と、
前記アクチュエータ(50)と前記クラッチ装置(26)とを接続する油路(53m)と、
前記油路(53m)に設けられ、前記油路(53m)を連通させる開弁状態と前記油路(53m)を閉鎖する閉弁状態とを切り替え可能なバルブ機構(56)と、
前記アクチュエータ(50)から前記クラッチ装置(26)への油圧の供給を許容し、前記クラッチ装置(26)から前記アクチュエータ(50)への油圧の供給を遮断するワンウェイバルブ(53c1)と、
前記アクチュエータ(50)の駆動を継続することにより前記クラッチ装置(26)に供給される油圧を保持するアクチュエータ保持制御と、前記アクチュエータ(50)の駆動後に前記バルブ機構(56)を閉弁状態とすることにより前記クラッチ装置(26)に供給される油圧を保持するバルブ保持制御と、を行う制御部(60)と、を備え、
前記制御部(60)は、前記アクチュエータ保持制御を維持したまま所定時間経過した場合、前記アクチュエータ保持制御から前記バルブ保持制御に切り替えることを特徴とする鞍乗り型車両のクラッチ制御装置。 Normal open type clutch device (26) and
An actuator (50) that supplies hydraulic pressure to the clutch device (26) and
An oil passage (53 m) connecting the actuator (50) and the clutch device (26),
A valve mechanism (56) provided in the oil passage (53 m) and capable of switching between a valve open state for communicating the oil passage (53 m) and a valve closed state for closing the oil passage (53 m).
A one-way valve (53c1) that allows the supply of hydraulic pressure from the actuator (50) to the clutch device (26) and shuts off the supply of hydraulic pressure from the clutch device (26) to the actuator (50).
The actuator holding control for holding the hydraulic pressure supplied to the clutch device (26) by continuing the driving of the actuator (50) and the valve mechanism (56) being closed after the actuator (50) is driven. A valve holding control for holding the hydraulic pressure supplied to the clutch device (26) and a control unit (60) for performing the valve holding control are provided.
The control unit (60) is a clutch control device for a saddle-mounted vehicle, which switches from the actuator holding control to the valve holding control when a predetermined time elapses while maintaining the actuator holding control. - 前記制御部(60)は、車両(1)が登り坂状況であることを検知した場合、前記登り坂状況に応じて半クラッチにより停車位置を維持するために必要な油圧を算出することを特徴とする請求項1に記載の鞍乗り型車両のクラッチ制御装置。 When the control unit (60) detects that the vehicle (1) is in an uphill condition, the control unit (60) calculates the hydraulic pressure required to maintain the stopped position by the half-clutch according to the uphill condition. The clutch control device for a saddle-riding vehicle according to claim 1.
- 前記車両(1)が前記登り坂状況であることを検知するための慣性計測装置(49)を更に備え、
前記制御部(60)は、前記慣性計測装置(49)の検知結果に基づいて前記停車位置を維持するために必要な油圧を算出することを特徴とする請求項2に記載の鞍乗り型車両のクラッチ制御装置。 Further equipped with an inertial measurement unit (49) for detecting that the vehicle (1) is in the uphill condition,
The saddle-riding vehicle according to claim 2, wherein the control unit (60) calculates the hydraulic pressure required to maintain the stopped position based on the detection result of the inertial measurement unit (49). Clutch control device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021509101A JP7163483B2 (en) | 2019-03-27 | 2020-03-16 | Clutch control device for saddle type vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019059880 | 2019-03-27 | ||
| JP2019-059880 | 2019-03-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020196045A1 true WO2020196045A1 (en) | 2020-10-01 |
Family
ID=72609508
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/011511 WO2020196045A1 (en) | 2019-03-27 | 2020-03-16 | Clutch control device for saddle-type vehicle |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7163483B2 (en) |
| WO (1) | WO2020196045A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61129329A (en) * | 1984-11-27 | 1986-06-17 | Hino Motors Ltd | Automatic transmission |
| JP2011064280A (en) * | 2009-09-17 | 2011-03-31 | Toyota Motor Corp | Hydraulic control device for friction engaging mechanism |
| JP2017166686A (en) * | 2016-03-18 | 2017-09-21 | 本田技研工業株式会社 | Hydraulic system |
| WO2017169324A1 (en) * | 2016-03-29 | 2017-10-05 | 本田技研工業株式会社 | Driving force control device for straddle-type vehicles |
| JP2018054044A (en) * | 2016-09-29 | 2018-04-05 | 本田技研工業株式会社 | Clutch actuator |
-
2020
- 2020-03-16 WO PCT/JP2020/011511 patent/WO2020196045A1/en active Application Filing
- 2020-03-16 JP JP2021509101A patent/JP7163483B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61129329A (en) * | 1984-11-27 | 1986-06-17 | Hino Motors Ltd | Automatic transmission |
| JP2011064280A (en) * | 2009-09-17 | 2011-03-31 | Toyota Motor Corp | Hydraulic control device for friction engaging mechanism |
| JP2017166686A (en) * | 2016-03-18 | 2017-09-21 | 本田技研工業株式会社 | Hydraulic system |
| WO2017169324A1 (en) * | 2016-03-29 | 2017-10-05 | 本田技研工業株式会社 | Driving force control device for straddle-type vehicles |
| JP2018054044A (en) * | 2016-09-29 | 2018-04-05 | 本田技研工業株式会社 | Clutch actuator |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020196045A1 (en) | 2020-10-01 |
| JP7163483B2 (en) | 2022-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6792495B2 (en) | Shift control device | |
| JP7064874B2 (en) | Clutch control device and clutch control system | |
| WO2020213333A1 (en) | Clutch control device | |
| JP6756043B2 (en) | Vehicle shifting system | |
| US10760629B2 (en) | Clutch control apparatus | |
| JP7059442B2 (en) | Clutch control device and clutch control method for saddle-mounted vehicles | |
| JP6845948B2 (en) | Transmission | |
| WO2020189426A1 (en) | Clutch control device | |
| WO2020196045A1 (en) | Clutch control device for saddle-type vehicle | |
| WO2020195779A1 (en) | Clutch control device for saddle-type vehicle | |
| JP7003288B2 (en) | Clutch control device | |
| JP7068465B2 (en) | Clutch control device | |
| CN109838474B (en) | Clutch control device | |
| CN109838475B (en) | Clutch control device | |
| JP6726810B2 (en) | Clutch control device | |
| JP7073579B2 (en) | Clutch control device and clutch control method for saddle-mounted vehicles | |
| WO2020184552A1 (en) | Transmission device and transmission device control method | |
| JPWO2019087512A1 (en) | Clutch control device | |
| JP6953633B2 (en) | Clutch control device | |
| WO2020195895A1 (en) | Clutch control device | |
| WO2020195789A1 (en) | Clutch control device | |
| WO2019003978A1 (en) | Vehicular transmission system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20779456 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021509101 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20779456 Country of ref document: EP Kind code of ref document: A1 |