WO2020004161A1 - 磁気検出モジュール、検出装置、ケースアセンブリ、及び、磁気検出モジュールの製造方法 - Google Patents
磁気検出モジュール、検出装置、ケースアセンブリ、及び、磁気検出モジュールの製造方法 Download PDFInfo
- Publication number
- WO2020004161A1 WO2020004161A1 PCT/JP2019/024190 JP2019024190W WO2020004161A1 WO 2020004161 A1 WO2020004161 A1 WO 2020004161A1 JP 2019024190 W JP2019024190 W JP 2019024190W WO 2020004161 A1 WO2020004161 A1 WO 2020004161A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- housing
- magnetic
- case
- cap
- detection module
- Prior art date
Links
Images









































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24423—Mounting means or means for restraining during shipping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/16—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying resistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24428—Error prevention
- G01D5/24433—Error prevention by mechanical means
- G01D5/24442—Error prevention by mechanical means by mounting means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/104—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving permanent magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/221—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to steering wheels, e.g. for power assisted steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0011—Arrangements or instruments for measuring magnetic variables comprising means, e.g. flux concentrators, flux guides, for guiding or concentrating the magnetic flux, e.g. to the magnetic sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0047—Housings or packaging of magnetic sensors ; Holders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/007—Environmental aspects, e.g. temperature variations, radiation, stray fields
- G01R33/0076—Protection, e.g. with housings against stray fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/072—Constructional adaptation of the sensor to specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/091—Constructional adaptation of the sensor to specific applications
Definitions
- the present disclosure relates to a magnetic detection module, a detection device, a case assembly, and a method for manufacturing a magnetic detection module.
- a detection device that detects a magnetic flux generated in accordance with the movement of a movable body.
- a torque sensor disclosed in Patent Literature 1 detects a steering torque in a power steering device of a vehicle by detecting a magnetic flux change generated by a torsional displacement of a torsion bar housed in a housing with a magnetic sensor.
- a spigot cylinder portion is formed in a sensor holder to be joined to a mounting hole of a housing, and a seal member is interposed by compressing and interposing a sealing member between the mounting hole of the housing and the outer peripheral surface of the spigot cylinder portion. Seal.
- the elastic force of the seal member acts on the spigot cylinder in the radial direction of the outer peripheral surface.
- a detection device having a configuration in which a magnetic detection module including a magnetic sensor is inserted into a mounting hole of a housing is known.
- a case that is, a magnetic detection module
- a detection unit that is, a detection circuit board, and the like
- a through hole that is, a mounting hole
- the outer end of the through-hole of the housing and the outer surface of the case have a positioning surface for determining the position of the detection unit in the housing.
- a magnetic detection module that has a magnetic sensor and outputs a detection signal to the outside is attached to the housing that houses the movable body and the magnetic flux generation unit as a structure of the detection device that detects the magnetic flux generated according to the movement of the movable body.
- the magnetic detection module includes a case assembly in which a magnetic sensor is housed in a case.
- the case assembly includes, in addition to the magnetic sensor, a board on which a signal output circuit is mounted, a connector to which signal lines are wired, and the like.
- the torque sensor disclosed in Patent Literature 1 includes a seal member, but in reality, a waterproof function is required in a rack-mounted type, and a waterproof function is required in a column-mounted type, depending on the part of the vehicle in which the torque sensor is mounted. The difference is that no functionality is required. Therefore, it is necessary to provide a sealing material between the magnetic detection module and the housing when applied to a waterproof detection device, and between the magnetic detection module and the housing when applied to a non-waterproof detection device. No sealing material is required.
- Two types of molds are required if a dedicated case is manufactured for each of the waterproof and non-waterproof housings by, for example, resin molding, and production adjustment and inventory management man-hours for the two cases are required. Further, for example, when there are a plurality of specifications having different shapes and sizes of sealing materials among the waterproof specifications, it is necessary to switch production of another model, and the die cost and management cost increase.
- Patent Document 2 In the configuration of Patent Document 2, the inner wall of the mounting hole of the housing has a rectangular cylindrical shape. On the other hand, Patent Document 2 does not specifically disclose a positioning configuration when the inner wall of the mounting hole of the housing is cylindrical.
- An object of the disclosure of the first group is to provide a magnetic detection module that can be selectively attached to a plurality of housings having different specifications by a simple configuration change using a common component, a case assembly configuring the same, and manufacturing thereof. It is to provide a method.
- An object of the disclosure of the second group is to provide a detection device in which a magnetic detection module is mounted on a housing having an inner wall having a cylindrical mounting hole, wherein the detection device prevents interference between a sensor portion protruding from a front end surface and a member on the housing side. , And a magnetic detection module.
- the magnetic detection module according to the present disclosure is provided so as to be selectively attachable to any one of a plurality of specifications of housings having different shapes or sizes of attachment portions, and detects a magnetic flux generated in the housing.
- the magnetic detection module includes one or more magnetic sensors that detect a magnetic flux, a case in which the magnetic sensors are housed, and a cap that can be attached to an end of the case and provided with a sealing material.
- This magnetic detection module can be attached to the housing of the first specification in a state where the cap is not mounted on the case, and is mounted on the housing of the second specification via a sealing material while the cap is mounted on the case. Can be attached.
- the sealing material is not provided when the cap is mounted on the case, but may be provided before the cap is mounted on the housing.
- the magnetic detection module further includes one or more magnetic flux guide members for guiding the detected magnetic flux to the magnetic sensor in the case.
- the specification of attachment to the housing can be changed depending on the presence or absence of the cap.
- a magnetic detection module in which a cap provided with a sealing material is attached to a case is supplied to a waterproof housing.
- a case assembly without a cap is supplied alone as a magnetic detection module. Therefore, for example, when the case is manufactured by resin molding, only one type of mold is required for the case, and inventory management is simplified.
- the case assembly includes one or more magnetic sensors for detecting magnetic flux, and a case in which the magnetic sensors are housed.
- This case assembly can be attached alone to the housing of the first specification, and the cap provided with the sealing material is attached to the housing of the second specification via the sealing material with the cap provided on the end of the case. Can be attached.
- the method for manufacturing the magnetic detection module includes a storing step, a selecting step, and a mounting step.
- the housing step one or more magnetic sensors for detecting magnetic flux are housed in a case to manufacture a case assembly.
- the selection step depending on the specification of the housing to be attached, it is selected whether the case assembly is used alone or a cap set for each housing specification is attached to the end of the case.
- the attaching step when the cap is selected to be attached to the case in the selecting step, the cap is attached to the case and fixed.
- the detection device includes a housing and a magnetic detection module.
- the housing has a mounting hole in which a set of yokes for transmitting magnetic flux generated according to the magnitude of the physical quantity to be detected is provided.
- the magnetic detection module is mounted in a mounting hole of the housing, and detects magnetic flux transmitted from the yoke by one or more magnetic sensors housed in the case.
- One set of yokes has a ring portion facing each other to form a magnetic circuit.
- the mounting hole of the housing has a large hole formed on the opening side and a small hole formed in the back of the large hole.
- the magnetic detection module has a cylinder part and a sensor part.
- the tubular portion has a large shaft portion inserted into the large hole and a small shaft portion inserted into the small hole, facing the inner wall of the mounting hole.
- the cylindrical portion may be formed integrally with the case.
- the cylindrical portion may be configured by a plate-like cap body of a cap attached to an end of the case.
- the sensor section houses the magnetic sensor, protrudes from the distal end surface of the tubular section, and is inserted between the ring sections of a pair of yokes.
- the minimum distance between the sensor part and the ring part in the direction perpendicular to the axial direction of the mounting hole and the cylindrical part is defined as “sensor margin”. At least one of the one-side fitting gap between the large hole and the large shaft portion or the one-side fitting gap between the small hole and the small shaft portion is set smaller than the sensor margin.
- the “cylindrical part” is formed as a cylindrical “cylindrical part”.
- “large hole”, “small hole”, “large shaft” and “small shaft” are read as “large hole”, “small hole”, “large diameter” and “small diameter”, respectively.
- “the direction orthogonal to the axial direction of the cylindrical portion” is read as “radial direction of the cylindrical portion”.
- the detection device of the present disclosure displacement or inclination when the magnetic detection module is inserted into the mounting hole is suppressed. Therefore, the sensor section is prevented from interfering with the ring section of the yoke which is a member on the housing side. Also provided is a magnetic detection module attached to the housing in the above detection device.
- FIG. 1 is an exploded perspective view illustrating a basic configuration of a torque detection device to which a magnetic detection module is applied.
- FIG. 2A is a front view of a magnetic detection module mounting portion of a column-mounted type (non-waterproof specification) housing;
- FIG. 2B is a perspective view of FIG. 2A,
- FIG. 3A is a front view of a magnetic detection module mounting portion of a rack-mounted type (waterproof specification) housing,
- FIG. 3B is a perspective view of FIG. 3A,
- FIG. 4 is an exploded perspective view of the magnetic detection module according to the first embodiment, FIG.
- FIG. 5A is a cross-sectional view of the cap and the case assembly
- FIG. 5B is a cross-sectional view of the torque detection device in which the case assembly is independently attached to a non-waterproof housing
- FIG. 6A is a side view of a magnetic detection module in which a cap is attached to a case assembly
- FIG. 6B is a cross-sectional view of the torque detector in which the case assembly with the cap attached is attached to a waterproof housing.
- FIG. 7A is a plan view of a case assembly alone
- FIG. 7B is a front view taken along arrow VIIb of FIG. 7A
- FIG. 8A is a plan view showing a state where a cap is attached to the case assembly
- 8B is a front view taken along the arrow VIIIb in FIG.
- FIG. 9A is a schematic cross-sectional view of a torque detection device in which a cap according to a first modification of the first embodiment is attached to a housing
- FIG. 9B is a sectional view taken along line IXb-IXb of FIG. 9A
- FIG. 10 is a perspective view of a mounting hole of a housing to which the cap of FIG. 9A is mounted
- FIG. 11A is a schematic cross-sectional view of a torque detection device in which a cap according to a second modification of the first embodiment is attached to a housing
- 11B is a sectional view taken along line XIb-XIb of FIG. 11A
- FIG. 12 is a perspective view of a mounting hole of the housing to which the cap of FIG.
- FIG. 11A is mounted;
- FIG. 13A is a plan view illustrating a magnetic transmission operation between the yoke and the magnetic flux guide member in a state where the magnetic detection module is attached to the housing;
- FIG. 13B is a side view taken along arrow XIIIb in FIG. 13A.
- FIG. 14 is an axial sectional view taken along line XIV-XIV of FIG. 13A,
- FIG. 15 is a correlation diagram between the distance from the reference line and the magnetic permeance,
- FIG. 16 is a flowchart of a method for manufacturing a magnetic detection module,
- FIG. 17A is a plan view of a case assembly alone according to the second embodiment in which a magnetic shield member is provided in a case,
- FIG. 17B is a sectional view taken along line XVIIb-XVIIb of the magnetic shield member and the case assembly;
- FIG. 17C is a cross-sectional view of the case assembly provided with the magnetic shield member,
- FIG. 18A is a plan view of a magnetic detection module of a second embodiment in which a magnetic shield member is provided on a cap, 18B is a sectional view taken along line XVIIIb-XVIIIb in FIG. 18A,
- FIG. 19 is a sectional view of a torque detection device in which the magnetic detection module according to the third embodiment is attached to a housing.
- FIG. 20 is a cross-sectional view of a torque detection device in which the magnetic detection module according to the fourth embodiment is attached to a housing.
- FIG. 21 is a schematic sectional view (1) showing a dimensional relationship between the third and fourth embodiments
- FIG. 22 is a schematic sectional view (2) showing a dimensional relationship between the third and fourth embodiments
- FIG. 23A is a cross-sectional view of the cylindrical portion taken along the line AA in FIGS. 21 and 22 showing a first example of the shape of the rotation restricting (preventing incorrect assembly) portion
- FIG. 23B is a front view of a mounting hole of the housing as viewed in the direction of arrow B in FIGS. 21 and 22, showing a first example of the shape of the rotation restricting (preventing incorrect assembly) portion
- FIG. 24A is a diagram similar to FIG. 23A, showing a shape example 2 of the rotation restricting (preventing incorrect assembly) portion
- FIG. 24A is a diagram similar to FIG. 23A, showing a shape example 2 of the rotation restricting (preventing incorrect assembly) portion
- FIG. 24B is a diagram similar to FIG. 23B, illustrating a second example of the shape of the rotation restricting (preventing incorrect assembly) portion
- FIG. 25A is a diagram similar to FIG. 23A, illustrating a third example of the shape of the rotation restricting (preventing incorrect assembly) portion.
- FIG. 25B is a diagram similar to FIG. 23B, illustrating a third example of the shape of the rotation restricting (preventing incorrect assembly) portion;
- FIG. 26A is a cross-sectional view of a cap and a case assembly using the cap of another embodiment,
- FIG. 26B is a side view of the magnetic detection module in which the cap of the other embodiment is mounted on the case assembly;
- FIG. 27 is a schematic configuration diagram of an electric power steering device to which the torque detection device is applied.
- the detection device of the present embodiment functions as a torque detection device that detects a steering torque in an electric power steering device. Further, the magnetic detection module of the present embodiment is applied to this torque detection device.
- the first and second embodiments correspond to [Disclosure of First Group].
- the third and fourth embodiments also correspond to [Disclosure of Second Group].
- the form in which the O-ring as the sealing material is mounted in the third embodiment also corresponds to [Disclosure of First Group].
- the torque detection device 10 includes a magnetic detection module 90, and detects a torque based on a magnetic flux generated according to the input torque.
- the torque detecting device 10 includes an element housed in the housing 40 mounted on the vehicle, and an element configured as the magnetic detection module 90 and attached to the housing 40.
- Elements housed in the housing 40 include the torsion bar 13, the multi-pole magnet 14, a pair of yokes 31, 32, and the like.
- Elements configured as the magnetic detection module 90 include the magnetic flux guide members 601 and 602 and the magnetic sensors 71 and 72.
- the torsion bar 13 has one end fixed to the input shaft 11 and the other end fixed to the output shaft 12 with fixing pins 15, respectively, and connects the input shaft 11 and the output shaft 12 coaxially with the center axis O.
- the torsion bar 13 is a rod-shaped elastic member, and converts the steering torque applied to the steering shaft 94 into a torsional displacement.
- the multipole magnet 14 is fixed to the input shaft 11 and has N poles and S poles arranged alternately in the circumferential direction.
- the pair of yokes 31 and 32 are formed of a soft magnetic material, and are fixed to the output shaft 12 outside the multipole magnet 14.
- Each of the yokes 31 and 32 has a ring portion 35 and 36 facing each other with a gap in the axial direction, and a plurality of claws 33 extending in the axial direction from the inner peripheral edge of each ring portion 35 and 36 toward the counterpart ring portion. , 34.
- the same number of claws 33 and 34 as the N pole and S pole of the multipole magnet 14 are provided at equal intervals around the entire circumference along the inner peripheral edges of the ring portions 35 and 36.
- the claws 33 of the one yoke 31 and the claws 34 of the other yoke 32 are alternately arranged while being shifted in the circumferential direction.
- the pair of yokes 31, 32 forms a magnetic circuit in the magnetic field generated by the multipole magnet 14.
- the center axis O may be defined based on any of them.
- the center axes O of the yokes 31, 32 are basically described with reference to the yokes 31, 32 for which the facing relationship with the magnetic flux guiding members 601 and 602 is noted.
- the axial and radial directions of the torsion bar 13, the multipole magnet 14, the pair of yokes 31, 32, and the like are simply referred to as "axial direction” and "radial direction.”
- the magnetic flux guide members 601 and 602 of the magnetic detection module 90 are formed of a soft magnetic material, and the pair of yokes 31 and 32 and the main body 600 are axially opposed to each other to guide magnetic flux of a magnetic circuit to the magnetic sensors 71 and 72. .
- a pair of magnetic flux guide members 601 and 602 facing each other in the axial direction are provided.
- the yoke 31 and the magnetic flux guiding member 601 arranged on the first shaft 11 side in FIG. 1 are referred to as “upper yoke 31” and “upper magnetic flux guiding member 601”.
- the yoke 32 and the magnetic flux guiding member 602 disposed on the second shaft 12 side are referred to as “the lower yoke 32” and “the lower magnetic flux guiding member 602”.
- the upper magnetic flux guiding member 601 faces the upper yoke 31, and the lower magnetic flux guiding member 602 faces the lower yoke 32.
- One set of magnetic flux guide members 601 and 602 of the present embodiment has two sets of extending portions 61 and 62 branched from the main body 600. Specifically, the extending portions 61 and 62 extend from the main body 600 radially outward of the yokes 31 and 32. The two magnetic sensors 71 and 72 are arranged between the extending portions 61 and 62, respectively. The extension portions 61 and 62 have a step in the axial direction so that a gap is minimized in a portion where the magnetic sensors 71 and 72 are arranged.
- the magnetic sensors 71 and 72 detect magnetic fluxes induced by the magnetic flux guiding members 601 and 602 from the ring portions 35 and 36 of the pair of yokes 31 and 32, convert the magnetic fluxes into voltage signals, and perform external processing via a harness. Output to the device.
- the magnetic sensors 71 and 72 are configured by a substantially rectangular parallelepiped IC package in which a hall element, a magnetoresistive element, and the like are resin-molded.
- the magnetic detection module 90 includes two magnetic sensors 71 and 72 and redundantly outputs two values as steering torque to the processing device. With such a redundant configuration, even if one of the information becomes unusable due to a failure of the magnetic sensor or the arithmetic circuit, the processing device can continue the control.
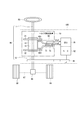
- FIG. 27 a schematic configuration of an electric power steering device to which the torque detection device is applied will be described with reference to FIG.
- the electric power steering device 100 shown in FIG. 27 is a column assist type
- the present invention can be similarly applied to a rack assist type electric power steering device.
- a torque detection device 10 for detecting a steering torque is installed on a steering shaft 94 connected to the steering wheel 93.
- a pinion gear 96 is provided at an end of the steering shaft 94, and the pinion gear 96 is engaged with a rack shaft 97.
- a pair of wheels 98 are rotatably connected to both ends of the rack shaft 97 via tie rods or the like. The rotational motion of the steering shaft 94 is converted into linear motion of the rack shaft 97 by the pinion gear 96, and the pair of wheels 98 is steered.
- the torque detecting device 10 is provided between the input shaft 11 and the output shaft 12 constituting the steering shaft 94, detects a steering torque applied to the steering shaft 94, and outputs the steering torque to the ECU 91.
- the ECU 91 controls the output of the motor 92 according to the detected steering torque.
- the steering assist torque generated by the motor 92 is reduced through the reduction gear 95 and transmitted to the steering shaft 94.
- a housing 401 shown in FIGS. 2A and 2B is a column-mounted housing provided on a steering shaft of the electric power steering device.
- a housing 402 shown in FIGS. 3A and 3B is a rack-mounted housing provided on a rack shaft that connects a pinion gear at the tip of a steering shaft and a wheel.
- the rack-mounted type housing 402 is in an environment where rainwater or the like is exposed to the road surface when the vehicle is running or the like, and it is necessary to provide a seal material on the mounting portion in order to prevent water from entering the housing through a gap between the mounting portions. is there.
- the column-mounted housing 401 provided in the vehicle cabin there is no risk of water infiltration, so that there is no need to provide a sealant on the mounting portion.
- non-waterproof housing 401 there are a non-waterproof housing 401 and a waterproof housing 402 depending on the mounting location of the torque detection device 10 in the vehicle.
- the housing 401 corresponds to a “housing of a first specification”
- the housing 402 corresponds to a “housing of a second specification”.
- water of “waterproof” means not only pure water but also any liquid that may enter the housing.
- Each of the housings 401 and 402 has a substantially cylindrical shape with the axis O as a central axis, and a flat mounting plate 400 is formed on a part of the outer periphery.
- the mounting plate 400 has mounting holes 41 and 42 formed over a plane including the central axis O, and fixing holes 48 such as bolts are formed on both circumferential sides of the mounting holes 41 and 42.
- the two-dot chain line indicates a portion where the flange 57 shown in FIGS. 7B and 8B abuts, and the fixing hole 48 corresponds to the position of the fixing hole 58 of the flange 57.
- the mounting hole 41 is formed in a substantially rectangular shape.
- One rotation restricting groove 44 is formed at the center lower part of the mounting hole 41, and two rotation restricting grooves 45 are formed on both sides of the mounting hole 41.
- the rotation regulating groove 44 in the lower center is formed relatively shallow, and the rotation regulating groove 45 in the upper part on both sides is formed relatively deep. The function of the rotation regulating grooves 44 and 45 will be described later with reference to FIG. 5B.
- the mounting hole 42 has a substantially rectangular case hole 421 on the far side in the depth direction, and a circular seal hole 422 in the middle in the depth direction. , And a circular spigot hole 423 on the end face side.
- One rotation regulating groove 471 is formed at the upper center of the spigot hole 423 so as to be continuous with the spigot hole 423. The function of the rotation restricting groove 471 will be described later with reference to FIG. 6B.
- an object is to provide a magnetic detection module that can be selectively attached to two types of housings 401 and 402 having different specifications by a simple configuration change using common components. I do.
- the first embodiment reflects the basic technical idea of sharing the case, and the second embodiment is different from the first embodiment in that a magnetic shield member that blocks external magnetic noise is further provided. It is provided.
- the numbers of the embodiments are given to the third digits following “10” and “90” for the reference numerals of the detection device and the magnetic detection module of each embodiment.
- the reference numerals of the constituent members in the case of a configuration unique to the embodiment, the number of the embodiment is similarly assigned to the third digit, and in the case of substantially the same configuration as the above-described embodiment, the reference numeral of the above-described embodiment is used. Invite.
- the magnetic detection module 901 includes a case assembly 500 and a cap 801.
- the case assembly 500 includes a case 501, magnetic flux guide members 601 and 602, magnetic sensors 71 and 72, and a substrate 70 housed in the box 51 of the case 501.
- the magnetic flux guiding members 601, 602 and the magnetic sensors 71, 72 are as described above with reference to FIG.
- the substrate 70 is provided with an output circuit for sensor signals in addition to the magnetic sensors 71 and 72.
- the case 501 is formed of resin, and has a rectangular parallelepiped box portion 51, a connector portion 56 to which a harness for transmitting a signal to an external processing device is connected, and a fixing hole 58 for attachment to the housings 401 and 402. It has a formed flange portion 57 and the like. Terminals 73 connected to the substrate 70 are insert-molded between the bottom of the box 51 and the bottom of the connector 56.
- the substantially rectangular substrate 70 on which the magnetic sensors 71 and 72 are mounted is installed on the bottom of the box 51.
- the open end 52 side of the box portion 51 is set to the upper side, and the bottom side of the box portion 51 is set to the lower side.
- the side of the box 51 where the magnetic sensors 71 and 72 are mounted is defined as the front, and the connector 56 is defined as the rear.
- An end portion of the case 501 located forward from the flange portion 57 of the box portion 51 forms an insertion portion 53.
- a diagram viewed from the opening end 52 side is shown as a plan view
- a diagram viewed from the insertion portion 53 side is shown as a front view.
- “in a plan view” means “when viewed from the opening end 52 side”.
- the insertion portion 53 has a rectangular parallelepiped shape including a front wall 531, a side wall 532, and a bottom wall 533.
- Projections 55 are formed at the edges of the side walls 532 on both sides on the side of the opening end 52, which protrude upward and serve as an “erroneous assembly prevention part” and a “rotation restriction part”.
- a projection 54 as a “mis-assembly preventing portion” and a “rotation restricting portion” protruding downward is provided at a central portion in the left-right direction and near the flange portion 57 in the front-rear direction. Is formed.
- the “mis-assembly prevention section” enables the case 501 or the cap 801 to be assembled only in a posture positioned at a predetermined relative angle when the case 501 or the cap 801 is assembled to the housing 40, and prevents erroneous assembly in a posture positioned other than the predetermined relative angle.
- the “rotation restricting section” restricts rotation with respect to the housing 40 after the case 501 or the cap 801 is assembled to the housing 40.
- Each of the pair of magnetic flux guide members 601 and 602 includes a main body 600 that has a rectangular band shape in a plan view and collects magnetic flux, and two extending portions 61 and 62 extending from the main body 600 in the orthogonal direction.
- the parts 61 and 62 are installed so as to sandwich the magnetic sensors 71 and 72 in the vertical direction.
- the magnetic sensors 71 and 72 are arranged between the pair of magnetic flux guide members 601 and 602.
- the magnetic flux guiding members 601 and 602 are configured such that at least a part of the main body 600 faces the ring portions 35 and 36 of the cylindrical yokes 31 and 32 provided in the housing 40, and a magnetic flux from a magnetic circuit formed on the yokes 31 and 32. Is induced.
- the rectangular belt-shaped shapes of the magnetic flux guide members 601 and 602 are simply referred to as “linear”. The detailed configuration and operation of the magnetic flux guide members 601 and 602 will be described later.
- the box portion 51 of the case 501 is potted from the opening end 52 with the molten resin, and the stored components are fixed.
- a lid 59 for closing the opening end 52 may be used as a separate component.
- the upper magnetic flux guide member 601 can be insert-molded integrally with the lid 59.
- the opening end 52 may be closed with only the potting of the molten resin without using the lid 59 or with only the lid 59 without potting.
- the case assembly 500 in which the magnetic flux guide members 601 and 602, the magnetic sensors 71 and 72, and the substrate 70 are housed in the case 501 is configured.
- the case assembly 500 can be independently attached to the non-waterproof housing 401.
- the cap 801 attached to the insertion portion 53, the cap 801 can be attached to the waterproof housing 402.
- the single case assembly 500 constitutes a "magnetic detection module".
- the partner to which the cap 801 is mounted is the case assembly 500 in terms of the manufacturing process, but it can also be expressed as "the cap 801 is mounted on the case 501" from the viewpoint of parts.
- the cap 801 is formed of resin, and a receiving hole 83 into which the insertion portion 53 of the case 501 is inserted is formed in an end surface of the disk-shaped cap body 811 on the case 501 side.
- the receiving hole 83 is opened in a rectangular shape corresponding to the shape of the insertion portion 53 of the case 501, and the depth of the receiving hole 83 is deeper than the thickness of the cap body 811.
- Projection accommodation grooves 85 into which the projections 55 are inserted are formed in both upper portions of the receiving holes 83. Thereby, when inserting the insertion portion 53 into the receiving hole 83, it is prevented that the insertion portion 53 is inserted in the opposite direction by 180 °.
- a sealing portion 84 which is connected to the end surface of the cap body 811 on the side opposite to the case 501 and covers the bottom of the receiving hole 83 and has a bag shape is formed.
- the sealing portion 84 projects in a rectangular parallelepiped shape from the cap body 811 to the opposite side of the case 501, and the outer wall is formed to be slightly larger than the inner wall at the bottom of the receiving hole 83. In short, communication between the outer wall of the sealing portion 84 and the inner wall of the receiving portion 83 is blocked so that water does not leak.
- An outer flange 863 on the opening surface side of the receiving hole 83 and an inner flange 88 on the protruding side of the sealing portion 84 are provided in parallel on the outer periphery of the cap body 811, and the outer flange 863 and the inner flange 88 are provided. And an outer peripheral groove 82 is formed.
- a projecting portion 871 is formed at the upper center of the outer flange 863 so as to protrude outward in the radial direction, as a “erroneous assembly preventing portion” and also as a “rotation restricting portion”.
- O An O-ring 89 as a “sealant” is mounted in the outer peripheral groove 82. At this time, the inner peripheral surface of the O-ring 89 contacts the bottom wall of the outer peripheral groove 82.
- the O-ring 89 may be attached to the outer peripheral groove 82 before assembling the cap 801 and the case 501, or may be provided in the outer peripheral groove 82 after assembling the cap 801 and the case 501.
- FIG. 5B shows the torque detection device 101 in which the case assembly 500 is independently mounted in the mounting hole 41 of the non-waterproof specification housing 401.
- the insertion portion 53 of the case 501 is inserted into the substantially rectangular mounting hole 41.
- the lower protrusion 54 is inserted into the rotation restricting groove 44, and the protrusions 55 on both upper sides are inserted into the rotation restricting groove 45. Therefore, when the case assembly 500 is assembled to the housing 401, the case assembly 500 is prevented from being erroneously assembled in the mounting hole 41 in the opposite direction by 180 °. After the assembly, the rotation of the case assembly 500 with respect to the housing 401 is restricted.
- FIG. 6B shows the torque detection device 101 in which the magnetic detection module 901 with the cap 801 mounted on the case assembly 500 is mounted in the mounting hole 42 of the waterproof housing 402.
- the sealing portion 84 of the cap 801 is inserted into the substantially rectangular case hole 421, the inner flange 88 is inserted into the seal hole 422, and the outer flange 863 is inserted into the spigot hole 423.
- the protrusion 871 into the rotation regulating groove 471, when the magnetic detection module 901 is assembled to the housing 402, it is prevented from being erroneously assembled in the mounting hole 42 in the opposite direction by 180 °. After the assembly, the rotation of the magnetic detection module 901 with respect to the housing 402 is restricted.
- 9A and 11A are schematic cross-sectional views showing a state where the cap 801 is attached to the housing 402.
- the schematic cross-sectional view shows a schematic cross-section in which the cap 801 and the case 501 are fused, and an accurate illustration of the internal structure as in FIG. 6B is omitted.
- a prismatic portion covered by the bag portion 84 protruding from the tip end surface of the cap body 811 is referred to as a “sensor portion 840”.
- the magnetic sensors 71 and 72 are housed in the sensor section 840.
- “contained” includes a configuration that is molded.
- FIGS. 9B and 11B are radial cross-sectional views showing the “erroneous assembly prevention part” and the “rotation restriction part” provided on the cap 801 or the housing 402 on the base end side of the cap 801.
- 10 and 12 are perspective views of the mounting hole 42 of the housing 402 corresponding to FIG. 3B.
- a projection 871 similar to that of FIG. 4 and the like is formed on the upper portion of the cap body 811, and the radially outward direction is provided on the lower portion of the cap body 811 at a predetermined interval.
- a pair of biprotrusions 872 projecting substantially in parallel with each other is formed.
- a rotation restricting convex portion 472 sandwiched between the double protruding portions 872 is formed on the other hand.
- a portion corresponding to the protrusion 871 on the end face of the housing 402 is a flat end face without unevenness.
- the cap 801 is attached to the housing 402 at a rotation position where the double protrusion 872 sandwiches the rotation restricting protrusion 472, so that the double protrusion 872 functions as a “rotation restricting portion”.
- the protrusion 871 interferes with the rotation restricting projection 472 of the housing 402. Function as As described above, in the first modified example, the protrusion 871 and the double protrusion 872 of the cap body 811 use the rotation control protrusion 472 of the housing 402 to function as the “error assembly prevention unit” and the “rotation control unit”. To share.
- a projection 874 projecting radially outward is formed at the lower portion of the cap body 811.
- the upper part of the cap body 811 has a simple cylindrical surface without irregularities.
- a rotation regulating groove 474 in which the tip of the projection 874 is engaged is formed in the pedestal 46 below the mounting hole 42.
- An interference projection 473 is formed at the edge of the mounting hole 42 opposite to the rotation regulating groove 474.
- the cap 801 is assembled to the housing 402 at a rotational position where the tip of the projection 874 engages with the rotation regulating groove 474, so that the projection 874 functions as a “rotation regulating section”.
- the projection 874 interferes with the interference projection 473 of the housing 402. Function.
- the projection 874 of the cap body 811 functions as the “erroneous assembly prevention unit” using the interference projection 473 of the housing 402 and uses the rotation restricting groove 474 of the housing 402. Thus, it functions as a “rotation restriction unit”.
- FIGS. 13A to 14 are plan views and side views showing the magnetic flux transmitting action between the yokes 31 and 32, the magnetic flux guiding members 601 and 602, and the magnetic sensors 71 and 72 when the case assembly 500 is attached to the housing.
- the plan view means a view from the first shaft 11 side in the axial direction
- the side view means a view from the radial direction.
- the “plan view” is strictly a radial cross-sectional view obtained by cutting the multipole magnet 14 and the claws 33 and 34 of the yokes 31 and 32 at the upper part of the upper magnetic flux guide member 601, but from the viewpoint of the magnetic flux guide member 601. This is referred to as "plan view”. Although only the lower yoke 32 is actually visible in the radial cross section, the reference numerals including the upper yoke 31 are denoted by “31, 32” for convenience of explanation.
- a“ reference line X ” extending in the left-right direction through the central axis O is described.
- the reference line X is defined as an imaginary straight line connecting an intermediate position between the two magnetic sensors 71 and 72 and the central axis O.
- the two magnetic sensors 71 and 72 are arranged symmetrically with respect to the reference line X.
- the reference line X is defined as a virtual straight line connecting the magnetic sensor and the central axis O.
- FIG. 13B The side view of FIG. 13B is a view of the magnetic sensors 71 and 72 viewed from the radial outside along the reference line X.
- the two-dot chain line indicates the outer shape of the claws 33 and 34.
- illustration of the torsion bar 13 and the multipole magnet 14 is omitted.
- the axial sectional view of FIG. 14 is a sectional view on a plane including the central axis O and the reference line X.
- the illustration of the torsion bar 13 is omitted in the axial cross-sectional view, and only the outer shape of the multipole magnet 14 is shown.
- the main bodies of the magnetic flux guiding members 601 and 602 are formed in a rectangular band shape symmetrical with respect to the reference line X, that is, in a straight line shape in plan view.
- the longitudinal sides of the magnetic flux guide members 601 and 602 are straight lines orthogonal to the reference line X.
- the magnetic flux guide members 601 and 602 have extending portions 61 and 62 extending radially outward from the main body 600, and a “branch portion of the main body 600 to the extending contact portions 61 and 62” is referred to as an S portion.
- the “branch site to the extension portions 61, 62” means substantially near the magnetic sensors 71, 72.
- the “S part” is the same symbol as the S pole of the multipole magnet 14, but their distinction is obvious and there is no risk of confusion.
- peripheral ends 63 and 64 of the main body 600 are referred to as “peripheral ends 63 and 64 of the main body 600”.
- ”And is indicated by broken-line hatching in the figure.
- the distance ds from the S portion to the central axis O is shorter than the distance de from the peripheral ends 63 and 64 to the central axis O.
- the magnetic flux guide members 601 and 602 face the annular surfaces of the yokes 31 and 32 with a constant gap inside the axial direction in a side view and a sectional view in the axial direction. It is relatively large at 65 and becomes smaller toward the peripheral ends 63 and 64.
- the S portion which is a branch portion to the extension portions 61 and 62, has a larger opposing area than the peripheral end portions 63 and 64, so that the magnetic flux per unit area between the magnetic flux guiding members 601 and 602 and the yokes 31 and 32 is increased. Permeance increases.
- the meaning of “per unit area” is to clearly indicate that the area of the range in which the magnetic permeance is compared for each part is the same. In the following description, the description of “per unit area” is omitted each time, and “magnetic permeance” is interpreted as meaning “magnetic permeance per unit area”.
- the two magnetic sensors 71 and 72 are arranged between the extending portions 61 and 62, respectively.
- the extension portions 61 and 62 are bent in the axial direction so as to minimize the gap in a portion where the magnetic sensors 71 and 72 are arranged, and have a step.
- FIG. 15 shows a correlation diagram of the magnetic permeance between the magnetic flux guiding members 601 and 602 and the yokes 31 and 32 with respect to the distance or the rotation angle from the reference line X and the magnetic permeance.
- the magnetic flux guiding members 601 and 602 are formed of a single soft magnetic material
- the magnetic permeance P increases as L decreases.
- the gap between the magnetic flux guiding members 601 and 602 and the yokes 31 and 32 is constant, but the facing area becomes smaller from the intermediate portion 65 toward the peripheral ends 63 and 64, so that the magnetic force of the intermediate portion 65 is reduced.
- the permeance is larger than the magnetic permeance of the peripheral ends 63 and 64.
- the correlation characteristic may be any characteristic such as a straight line like P1, a simple curve without inflection point like P2, an S-shaped curve like P3, or a step-like broken line. Good.
- the magnetic sensors 71 and 72 are installed on the extending portions 61 and 62 branched from the main body 600 near the intermediate portion 65, and the magnetic flux guiding members 601 and 602 branch from the main body 600 to the extending contact portions 61 and 62, respectively. It substantially means “near the magnetic sensors 71 and 72”. Then, the magnetic flux guiding members 601 and 602 are branching portions to the extending contact portions 61 and 62, and have a “per unit area between the magnetic flux guiding members 601 and 602 and the yokes 31 and 32, compared to the peripheral ends 63 and 64. The magnetic permeance of "is increased. Thereby, the signals of the magnetic sensors 71 and 72 can be increased.
- the symbol S represents “step”.
- the magnetic flux guide members 601 and 602 the magnetic sensors 71 and 72, the substrate 70, and the like are stored in the box portion 51 of the case 501.
- the molten resin is potted in the remaining space of the box portion 51, and the magnetic sensors 71 and 72 are fixed.
- the box portion 51 may be covered with a lid 58.
- the case assembly 500 is manufactured.
- the selection result is determined. If it is attached to the waterproof housing 402, YES is determined in S25, and the process proceeds to S30. If it is attached to the non-waterproof housing 401, NO is determined in S25, and the process ends. In this case, the case assembly 500 is used alone without the cap 801 attached.
- the cap 801 is mounted on the case 501 and fixed.
- the insertion portion 53 formed at the end of the case 501 is inserted into the receiving hole 83 formed in the cap 801. Thereafter, the joint between the insertion portion 53 of the case 501 and the receiving hole 83 of the cap 801 is welded by laser welding or the like.
- the joining portion surrounding the magnetic sensors 71 and 72 is welded one round. Thus, water leakage from the bottom of the receiving hole 83 can be prevented.
- the cap 801 may be fixed with an adhesive in the mounting step. Further, when the molten resin is potted in the storage step, it is preferable that the curing of the potting and the curing of the adhesive are performed simultaneously. Thus, the cycle time can be reduced.
- the specification of attachment to the housing 40 can be changed depending on the presence or absence of the cap 801.
- a magnetic detection module in which a cap 801 provided with a sealing material 89 is attached to a case 501 is supplied to a waterproof housing 402.
- the case assembly 501 in which the cap 801 is not attached to the non-waterproof housing 401 is supplied alone as a magnetic detection module. Therefore, for example, when the case 501 is manufactured by resin molding, only one type of mold is required for the case 501, and inventory management is simplified.
- the magnetic shield member is formed of a soft magnetic material such as iron or permalloy, and blocks external magnetic noise.
- the rectangular frame-shaped magnetic shield member 37 is provided in the insertion portion 53 of the case assembly 500 which is independently attached to the non-waterproof housing 401. Specifically, after the molten resin is potted to the case 501, the magnetic shield member 37 is covered so as to surround the magnetic sensors 71 and 72 from all sides. Therefore, magnetic noise toward the magnetic sensors 71 and 72 is effectively shut off.
- a pair of arch-shaped magnetic shield members 38 are provided on a cap 801 of a magnetic detection module 902 attached to a waterproof housing 402.
- the pair of magnetic shield members 38 are provided so as to surround the sealing portion 84 from above and below.
- the magnetic shield member 38 is arranged such that the center line Ds in the depth direction overlaps the magnetic sensors 71 and 72. Therefore, magnetic noise toward the magnetic sensors 71 and 72 is effectively shut off.
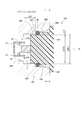
- the torque detecting device 103 of the third embodiment includes a housing 402 having an inner wall having a cylindrical mounting hole 42, and a magnetic detection module 903 mounted in the mounting hole 42.
- a pair of yokes 31 and 32 for transmitting a magnetic flux generated according to the magnitude of the torque are provided inside the housing 402.
- the magnetic detection module 903 detects the magnetic flux transmitted from the yokes 31, 32 by one or more magnetic sensors 71, 72.
- the magnetic detection module 903 of the third embodiment has a disk-shaped cap 803 attached to the tip of a case 501, as in the first embodiment.
- the outer peripheral surface of the cap body 813 in the cap 803 faces the inner wall of the mounting hole 42.
- the outer peripheral groove 82 is formed between the outer flange 863 and the inner flange 88, whereas the inner flange is provided in the cap 803 of the third embodiment.
- a radial step 823 is formed on the outer periphery.
- the O-ring 89 is attached to the step portion 823 as a sealing material for shaft sealing, but the O-ring 89 may not be provided in other embodiments.
- the step portion 823 is formed by a step between a large diameter portion 866 on the base end side of the cap body 813 and a small diameter portion 865 on the front end side.
- the large diameter part 866 and the small diameter part 865 correspond to a “large shaft part” and a “small shaft part”.
- the mounting hole 42 has a case hole 424, a small-diameter hole 425, a large-diameter hole 426, and a chamfered portion 427 in order from the end face 428 side.
- the large diameter hole 426 and the small diameter hole 425 correspond to “large hole” and “small hole”.
- the large diameter portion 866 of the cap 803 is inserted into the large diameter hole 426, and the small diameter portion 865 is inserted into the small diameter hole 425.
- a flange portion 868 abutting on the end surface 428 of the housing 402 is formed.
- a sensor section 840 protrudes from the tip end surface of the cap body 813. The tip of the sensor section 840 is inserted between the ring sections 35 and 36 of the pair of yokes 31 and 32.
- the configuration, operation, and effect related to the dimensional relationship are the same as the configuration, operation, and effect of the torque detection device 104 according to the fourth embodiment, and will be described together in the fourth embodiment.
- the torque detecting device 104 of the fourth embodiment includes a housing 402 having an inner wall having a cylindrical mounting hole 42, and a magnetic detection module 904 mounted in the mounting hole 42.
- a pair of yokes 31 and 32 for transmitting magnetic flux generated according to the magnitude of the torque are provided inside the housing 402.
- the magnetic detection module 904 detects the magnetic flux transmitted from the yokes 31, 32 by one or more magnetic sensors 71, 72.
- the magnetic detection module 904 is not intended to be selectively attachable to a plurality of housings, and the attachment target is limited to the housing 402 whose inner wall has the cylindrical attachment hole 42.
- an object is to prevent interference between the sensor unit 840 and a member on the housing 402 side when the magnetic detection module 904 is inserted into the housing 402.
- the magnetic detection module 904 of the fourth embodiment is configured by an integral case 504 instead of a configuration in which a cap of another member is attached to the end of the case.
- the case 504 is integrally formed of resin in the same shape as the state where the cap 803 is attached to the case 501 in the third embodiment shown in FIG. That is, the case 501 and the cap 803 are combined to form the integrated case 504 of the fourth embodiment.
- a portion corresponding to the cap body 813 of the cap 803 of the third embodiment is referred to as a “cylindrical portion 814” in the fourth embodiment.
- the cylindrical portion 814 corresponds to a “cylindrical portion”, and faces the inner wall of the mounting hole 42.
- a sensor section 840 protrudes from the distal end surface of the cylindrical section 814.
- a form in which the cylindrical portion 814 of the case 504 of the fourth embodiment is constituted by the cap body 813 of the cap 803 as a separate member corresponds to the third embodiment.
- the O-ring 89 is attached in two forms: “selective attachment to a plurality of waterproof and non-waterproof housings” and “prevention of interference between the magnetic sensor and the housing side member”. It is positioned to satisfy two purposes.
- the configuration of the cylindrical portion 814 of the fourth embodiment and the mounting hole 42 facing the cylindrical portion 814 is the same as the cap body 813 of the third embodiment and the mounting hole 42 facing the outer peripheral surface of the cap body 813.
- the configuration is substantially the same.
- the attachment hole 42 has a large-diameter hole 426 formed on the opening side and a small-diameter hole 425 formed behind the large-diameter hole 426.
- the cylindrical portion 814 has a flange portion 868 abutting on the end surface 428 of the housing, a large-diameter portion 866 inserted into the large-diameter hole 426, and a proximal end toward the distal end where the magnetic sensors 71 and 72 are arranged.
- the small diameter portion 865 is inserted into the small diameter hole 425.
- the O-ring 89 is mounted as a sealant on the outer periphery of the small diameter portion 865, but the O-ring 89 may be omitted in other embodiments.
- the O-ring 89 is used for a shaft seal between the small-diameter hole 425 and the inner wall.
- FIGS. 9A and 11A The cross-sectional views of the torque detecting device 104 in FIGS. 21 and 22 are schematic as in FIGS. 9A and 11A.
- the magnetic sensors 71 and 72 are housed in a “sensor part 840” which is a prism-shaped part protruding from the distal end surface of the cylindrical part 814. “Contained” includes a configuration that is molded.
- the sensor unit 840 interferes with a member on the housing 402 side due to a positional shift or an inclination when the magnetic detection module 904 is inserted into the mounting hole 42, the magnetic sensors 71 and 72 may be damaged or a characteristic change may occur. Therefore, in the fourth embodiment, interference between the sensor unit 840 and members on the housing 402 side is prevented.
- the sensor section 840 is inserted between the ring sections 35 and 36 of the pair of yokes 31 and 32 facing each other.
- the magnetic sensors 71 and 72 detect the magnetic flux.
- the minimum distance between the sensor unit 840 and the ring units 35 and 36 is defined as “sensor margin ⁇ ”.
- the sensor margin ⁇ is determined based on the distance between the ring units 35 and 36. Is half the length obtained by subtracting the thickness.
- FIG. 21 and FIG. 22 show an embodiment of two patterns having different dimensional relationships of diameters.
- the symbols for the dimensions of each part are defined as follows.
- the “one-side fitting gap” corresponds to half the fitting gap between the diameter of the hole and the diameter of the shaft.
- the letter “h” in the symbol represents the housing, and “s” represents the sensor.
- ⁇ ds1 outer diameter of the large-diameter portion 866 ⁇ 1: one-side fitting gap between the large-diameter hole 426 and the large-diameter portion 866
- ⁇ ds2 outer diameter of small-diameter portion 865 ⁇ 2: one-side fitting gap between small-diameter hole 425 and small-diameter portion 865
- the one-sided fitting gap ⁇ 1 between the large-diameter hole 426 and the large-diameter portion 866 is set to a small gap of, for example, less than 0.1 mm. That is, the fitting between the large diameter hole 426 and the large diameter portion 866 has a spigot structure. Therefore, accuracy such as coaxiality and squareness when the cylindrical portion 814 is inserted into the mounting hole 42 is ensured.
- the gap ⁇ 1 is set smaller than the sensor margin ⁇ ( ⁇ 1 ⁇ ).
- gap ⁇ 1 is set extremely smaller than sensor margin ⁇ ( ⁇ 1 ⁇ ⁇ ).
- the one-side fitting gap ⁇ 2 between the small-diameter hole 425 and the small-diameter portion 865 may be equal to or larger than the gap ⁇ 1.
- the ring portions 35, 36 of the yokes 31, 32 from the insertion end of the large diameter hole 426 that is, the boundary between the chamfered portion 427 and the large diameter hole 426.
- the distance to the outer edge is defined as “housing-side distance Lh1”.
- the distance from the boundary between the large-diameter portion 426 and the small-diameter portion 425 to the tip of the sensor unit 840 is defined as “sensor-side distance Ls1”.
- the housing-side distance Lh1 is set to be longer than the sensor-side distance Ls1.
- the one-side fitting gap ⁇ 2 between the small-diameter hole 425 and the small-diameter portion 865 is set to a minute gap of, for example, less than 0.1 mm. That is, the fitting between the small diameter hole 425 and the small diameter portion 865 has a spigot structure. Therefore, accuracy such as coaxiality and squareness when the cylindrical portion 814 is inserted into the mounting hole 42 is ensured.
- the gap ⁇ 2 is set smaller than the sensor margin ⁇ ( ⁇ 2 ⁇ ).
- gap ⁇ 2 is set to be extremely smaller than sensor margin ⁇ ( ⁇ 2 ⁇ ⁇ ).
- the one-sided fitting gap ⁇ 1 between the large-diameter hole 426 and the large-diameter portion 866 may be equal to or larger than the gap ⁇ 2.
- the outer edges of the ring portions 35 and 36 of the yokes 31 and 32 from the insertion end of the small diameter hole 425 (that is, the boundary between the large diameter hole 426 and the small diameter hole 425).
- the distance from the distal end surface of the cylindrical portion 814 to the distal end of the sensor portion 840 is defined as “sensor-side distance Ls2”.
- the housing-side distance Lh2 is set to be longer than the sensor-side distance Ls2.
- the sensor portion 840 can be used. Of the tip position is suppressed to be smaller than the sensor margin ⁇ . Therefore, when the magnetic detection module is inserted, it is possible to prevent interference between the sensor unit 840 and the yokes 31, 32 that are the housing-side members.
- Patent Literature 2 Japanese Patent No. 4753545
- a magnetic ring is arranged radially outward of a magnetic yoke and radially opposes the magnetic yoke.
- it is effective to secure concentricity between the magnetic ring and the magnetic yoke by positioning, but the positional accuracy in the rotational direction does not significantly affect the performance.
- the rotation direction of the cylindrical portion 814 with respect to the mounting hole 42 Is important. It is also important to prevent the magnetic detection module 904 from being mounted in the wrong direction, for example, by 180 °.
- FIGS. 23A, 24A, and 25A show cross sections of the cylindrical portion 814 taken along the line AA in FIGS. 21 and 22.
- FIGS. 23B, 24B, and 25B show front views of the mounting holes of the housing as viewed in the direction of arrow B in FIGS. It should be noted that the illustration of the changed portions of the assembly cross sections in FIGS. 21 and 22 corresponding to the respective shapes in FIGS. 23A to 25B is omitted. Further, for example, when used in a column mounting type that does not require waterproofing, the O-ring 89 may be omitted in each drawing.
- a projection 875 projecting radially outward is formed at one location in the circumferential direction of the large diameter portion 866.
- a rotation restricting groove 475 is formed at a position corresponding to the mounting hole 42.
- This configuration example is similar to the configuration examples of the protrusion 871 and the rotation restricting portion 471 in FIGS. 3A, 3B, 4, and the like.
- the protrusion 871 is formed on the outer periphery of the outer flange 863 inserted into the spigot hole 423
- the protrusion 875 is formed on the outer periphery of the large diameter portion 866. Is formed.
- the rotation of the cylindrical portion 814 is regulated by the engagement of the protrusion 875 with the rotation regulating groove 475.
- the mounting can be performed only in a posture in which the relative angle between the cylindrical portion 814 and the mounting hole 42 is at a regular angle, and erroneous mounting in a posture in which the relative angle is out of the predetermined relative angle is prevented.
- the protrusion 875 and the rotation restricting groove 475 function as a “wrong assembly preventing part” and a “rotation restricting part”.
- a flat portion 876 is formed on one side of the large diameter portion 866 in the circumferential direction.
- a rotation restricting recess 476 is formed at a position corresponding to the mounting hole 42.
- the flat portion 876 corresponds to a form in which the width of the protruding portion 875 is increased and the protruding length of the large diameter portion 866 with respect to the outer diameter is reduced.
- the protruding length of the flat portion 876 with respect to the outer diameter of the large-diameter portion 866 is substantially zero.
- a flat portion 876 may be formed on the minus side (ie, the center side) of the outer diameter of the large diameter portion 866, and the outer peripheral shape of the large diameter portion 866 may be a D-shape in which a part of the circumferential direction is connected by a straight line. Good.
- the flat portion 876 engages with the rotation restricting concave portion 476, so that the flat portion 876 and the rotation restricting concave portion 476 function as an “erroneous assembly preventing portion” and a “rotation restricting portion”.
- the separating portion 877 is formed at a position apart from the circular large-diameter portion 866 in the radially outward direction.
- the separating portion 877 is connected to the flange portion 868 via a connecting portion 878 indicated by a two-dot chain line.
- a rotation regulating hole 477 is formed at a position corresponding to the mounting hole 42.
- the separation part 877 fits into the rotation restriction hole 477, so that the separation part 877 and the rotation restriction hole 477 function as an “erroneous assembly prevention part” and a “rotation restriction part”.
- the positions of the protruding portion 875, the flat portion 876, and the separating portion 877 are not limited to the illustrated positions, but may be any positions in the circumferential direction. Also, a plurality of these may be arranged in the circumferential direction. However, when functioning as the “erroneous assembly prevention section”, a plurality of rotationally symmetric positions must be arranged so that a plurality of rotationally symmetric positions do not exist. Further, as in the modification of the first embodiment shown in FIGS. 9A to 12, a protrusion may be provided on the housing 402 side.
- the cap 801 in the form shown in FIGS. 4 to 8B has a bag-shaped sealing portion 84 formed at the tip, whereas the cap 801 has a bag like the magnetic detection module 905 shown in FIG.
- An unshaped cap 805 may be used.
- the distance (gap) between the opposing portions of the yokes 31, 32 and the magnetic flux guide members 601 and 602 is smaller by the thickness of the resin at the end than in the embodiment in which the sealing portion 84 is formed at the end. Sensitivity can be improved.
- the contact portion indicated by (*) in FIG. 26B be sealed with laser welding or an adhesive.
- the O-ring 89 as a sealing material is mounted on the outer peripheral groove 82 of the cap 801 and used for shaft sealing between the O-ring 89 and the inner wall of the mounting hole 42 of the housing 402.
- an O-ring, packing, gasket, or the like used for face sealing may be provided on the cap.
- the sealing material is not limited to a waterproof material, and may be an oil seal or a gas seal.
- the shape of the portion where the O-ring 89 is mounted on the outer periphery of the cap body 811 is not limited to the outer peripheral groove 82, and may be a radial step as in the third and fourth embodiments.
- attachment to the two types of housings 401 and 402 of the waterproof specification and the non-waterproof specification can be selected depending on whether or not the cap 801 is attached to the case 501.
- a cap according to each specification and put it on the case It may be attachable.
- a cap may be attached to the case as an adapter for a plurality of non-waterproof housings having different shapes and sizes of the mounting portions.
- the number of magnetic sensors provided in the magnetic detection module is not limited to two as exemplified in the above embodiment, and may be one or three or more. Further, the magnetic detection module may not include the magnetic flux guiding members 601 and 602, and the magnetic flux generated in the housing 40 may be directly transmitted from the pair of yokes 31 and 32 to the magnetic sensors 71 and 72.
- the shape of the main body of the magnetic flux guide member is not limited to a linear shape, may be an arc shape along the yoke, or the like, and the extension portion may not be provided. Further, the magnetic flux guiding member may face the pair of yokes 31 and 32 not in the axial direction but in the radial direction.
- the case 501 and the cap 801 are not limited to resin molded products, and may be made of another material that does not affect the magnetic detection.
- the method of mounting the cap 801 on the case 501 is not limited to the method of inserting the insertion portion 53 of the case 501 into the receiving hole 83 of the cap 801 and welding or bonding the joint portion. Good.
- the shapes of the erroneous assembly preventing portions and the rotation restricting portions on the housings 401 and 402 are not limited to the protrusions, grooves, and the like described in the above embodiment. Further, the positions and the numbers of the erroneous assembly preventing portion and the rotation restricting portion may be set as appropriate. Further, the present invention is not limited to a form having both functions, and may have only a mis-assembly prevention function or only a rotation regulating function. For example, the erroneous assembly preventing portion may be configured by an asymmetric shape. In addition, in the case where the purpose of preventing erroneous assembly or restricting rotation is achieved by another configuration, the erroneous assembly preventing unit or the rotation restricting unit may not be provided.
- the cylindrical portion 814 of the fourth embodiment is not limited to a cylindrical shape, and may be formed as a “cylindrical portion” including an elliptical cylindrical shape, a long cylindrical shape, a polygonal cylindrical shape, and the like. The same applies to the cap body 813 of the third embodiment.
- a sealing function by the O-ring is also ensured.
- it can be expressed using “diameter”.
- the large diameter portion and the small diameter portion are referred to as “large shaft portion”. And a "small shaft portion”.
- the large-diameter hole and the small-diameter hole of the mounting holes facing each other may be generalized as “large hole” and “small hole”.
- the direction perpendicular to the axial direction of the cylindrical portion and going from the center to the periphery is a pseudo "radial direction”
- the gap between the shaft portion and the hole on one side in the radial direction in the spigot structure is referred to as "one-side fitting gap". I just need to interpret it.
- the detection device to which the detection device of the present disclosure or the magnetic detection module of the present disclosure is applied is not limited to the torque detection device of the electric power steering device, and the magnetic flux generated according to the magnitude of the physical quantity to be detected. May be used as long as it can detect.
- the generated magnetic flux is transmitted by a pair of yokes provided inside the housing and detected by a magnetic sensor of the magnetic detection module.
- the present invention can be used as a rotation detector, a position detector, and the like that detect a magnetic flux generated in accordance with the rotation or linear movement of a movable body.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Environmental & Geological Engineering (AREA)
- Toxicology (AREA)
- Electromagnetism (AREA)
- Power Steering Mechanism (AREA)
Abstract
磁気検出モジュール(901)は、取付部の形状又は大きさが異なる複数の仕様のハウジングのいずれかに選択的に取付可能に設けられ、ハウジング内で発生した磁束を検出する。磁気検出モジュール(901)は、磁束を検出する一つ以上の磁気センサ(71、72)と、磁気センサが収納されるケース(501)と、ケース(501)の端部に装着可能でありシール材(89)が設けられるキャップ(801)と、を備える。磁気検出モジュール(901)は、ケース(501)にキャップ(801)が装着されない状態で、第1の仕様のハウジングに取付可能であり、且つ、ケース(501)にキャップ(801)が装着された状態で、第2の仕様のハウジングにシール材(89)を介して取付可能である。
Description
本出願は、2018年6月28日に出願された特許出願番号2018-123160号、及び、2018年10月17日に出願された特許出願番号2018-195711号に基づくものであり、ここにその記載内容を援用する。
本開示は、磁気検出モジュール、検出装置、ケースアセンブリ、及び、磁気検出モジュールの製造方法に関する。
従来、可動体の移動に応じて発生する磁束を検出する検出装置が知られている。例えば特許文献1に開示されたトルクセンサは、車両のパワーステアリング装置において、ハウジング内に収容されたトーションバーの捩れ変位により発生する磁束変化を磁気センサで検出することで、操舵トルクを検出する。このトルクセンサは、センサホルダにハウジングの取付穴に接合するインロー筒部を形成し、ハウジングの取付穴とインロー筒部の外周面との間にシール部材を圧縮して介装して両者の間を密封する。そして、シール部材の弾性力がインロー筒部に対して外周面の半径方向に作用する構成としている。
また従来、磁気センサを含む磁気検出モジュールをハウジングの取付穴に挿入する構成の検出装置が知られている。例えば特許文献2に開示されたトルク検出装置は、検出部及び検出回路基板等を含むケース(すなわち磁気検出モジュール)が、ハウジングのラジアル方向から貫通孔(すなわち取付穴)に挿入される。ハウジングの貫通孔の外側端部、及びケースの外面は、検出部のハウジング内での位置を決める位置決め面を有する。
[第1の視点]
一般に可動体の移動に応じて発生する磁束を検出する検出装置の構造として、可動体や磁束発生部が収容されたハウジングに、磁気センサを有し検出信号を外部に出力する磁気検出モジュールが取り付けられる構造が採用される。磁気検出モジュールは、磁気センサがケースに収納されてなるケースアセンブリを含む。ケースアセンブリは、磁気センサの他、信号出力回路が搭載された基板や信号線が配線されるコネクタ等を有する。このようなモジュール構造とすることで、現実の製品では、他から部品として供給された磁気検出モジュールが組立工場でハウジングに取り付けられる。
一般に可動体の移動に応じて発生する磁束を検出する検出装置の構造として、可動体や磁束発生部が収容されたハウジングに、磁気センサを有し検出信号を外部に出力する磁気検出モジュールが取り付けられる構造が採用される。磁気検出モジュールは、磁気センサがケースに収納されてなるケースアセンブリを含む。ケースアセンブリは、磁気センサの他、信号出力回路が搭載された基板や信号線が配線されるコネクタ等を有する。このようなモジュール構造とすることで、現実の製品では、他から部品として供給された磁気検出モジュールが組立工場でハウジングに取り付けられる。
ところで、特許文献1に開示されたトルクセンサはシール部材を備えるものであるが、現実にはトルクセンサが搭載される車両の部位により、ラック搭載タイプでは防水機能が要求され、コラム搭載タイプでは防水機能が要求されないという違いがある。そのため、防水仕様の検出装置に適用される場合は磁気検出モジュールとハウジングとの間にシール材を設ける必要があり、非防水仕様の検出装置に適用される場合は磁気検出モジュールとハウジングとの間のシール材は不要である。
仮に、防水仕様及び非防水仕様のハウジングに対しそれぞれ専用のケースを例えば樹脂成形により製造すると二種類の金型が必要となり、また二種類のケースの生産調整や在庫管理工数が発生する。さらに、例えば防水仕様の中でもシール材の形状やサイズの異なる複数の仕様が存在する場合、より他機種の生産切り替えが必要となり、金型コストや管理コストが増大する。
[第2の視点]
特許文献2の構成では、ハウジングの取付穴の内壁は長方形筒状である。一方、ハウジングの取付穴の内壁が円筒状である場合の位置決め構成に関して、特許文献2には具体的に明示されていない。
特許文献2の構成では、ハウジングの取付穴の内壁は長方形筒状である。一方、ハウジングの取付穴の内壁が円筒状である場合の位置決め構成に関して、特許文献2には具体的に明示されていない。
また、特許文献2の構成では、挿入部の外郭は磁性リングによって囲まれているため、磁気センサの収納部分が挿入作業時にハウジングに直接接触して破損するおそれはない。一方、磁気センサが収納されたセンサ部が磁気検出モジュールの先端面から突出する構成では、挿入時の位置ずれや傾きによりセンサ部がハウジング側の部材と干渉すると、磁気センサの破損や特性変化が生じるおそれがある。
[第1群の開示の目的]
第1群の開示の目的は、共通の構成要素を用いた簡易な構成変更により、仕様が異なる複数のハウジングへ選択的に取付可能な磁気検出モジュール、それを構成するケースアセンブリ、及び、その製造方法を提供することにある。
第1群の開示の目的は、共通の構成要素を用いた簡易な構成変更により、仕様が異なる複数のハウジングへ選択的に取付可能な磁気検出モジュール、それを構成するケースアセンブリ、及び、その製造方法を提供することにある。
[第2群の開示の目的]
第2群の開示の目的は、内壁が円筒状の取付穴を有するハウジングに磁気検出モジュールが取り付けられる検出装置において、先端面から突出するセンサ部とハウジング側の部材との干渉を防止する検出装置、及び磁気検出モジュールを提供することにある。
第2群の開示の目的は、内壁が円筒状の取付穴を有するハウジングに磁気検出モジュールが取り付けられる検出装置において、先端面から突出するセンサ部とハウジング側の部材との干渉を防止する検出装置、及び磁気検出モジュールを提供することにある。
[第1群の開示]
本開示の磁気検出モジュールは、取付部の形状又は大きさが異なる複数の仕様のハウジングのいずれかに選択的に取付可能に設けられ、ハウジング内で発生した磁束を検出する。この磁気検出モジュールは、磁束を検出する一つ以上の磁気センサと、磁気センサが収納されるケースと、ケースの端部に装着可能でありシール材が設けられるキャップと、を備える。
本開示の磁気検出モジュールは、取付部の形状又は大きさが異なる複数の仕様のハウジングのいずれかに選択的に取付可能に設けられ、ハウジング内で発生した磁束を検出する。この磁気検出モジュールは、磁束を検出する一つ以上の磁気センサと、磁気センサが収納されるケースと、ケースの端部に装着可能でありシール材が設けられるキャップと、を備える。
この磁気検出モジュールは、ケースにキャップが装着されない状態で、第1の仕様のハウジングに取付可能であり、且つ、ケースにキャップが装着された状態で、第2の仕様のハウジングにシール材を介して取付可能である。なお、シール材は、キャップがケースに装着される時点で設けられておらず、ハウジングに取り付ける前に設けられてもよい。
例えばこの磁気検出モジュールは、検出される磁束を磁気センサに誘導する一つ以上の磁束誘導部材をケース内にさらに備える。
本開示では、キャップの有無によりハウジングへの取付仕様を変更可能である。具体的には、防水仕様のハウジングに対しては、シール材が設けられるキャップがケースに装着された磁気検出モジュールが供給される。また、非防水仕様のハウジングに対しては、キャップが装着されないケースアセンブリが単独で磁気検出モジュールとして供給される。よって、例えばケースを樹脂成形により製造する場合、ケースの金型は一種類でよく、在庫管理も簡易になる。
また、上記の磁気検出モジュールを構成するケースアセンブリが提供される。このケースアセンブリは、磁束を検出する一つ以上の磁気センサと、磁気センサが収納されるケースと、を備える。このケースアセンブリは、単独で第1の仕様のハウジングに取付可能であり、且つ、シール材が設けられるキャップがケースの端部に装着された状態で、第2の仕様のハウジングにシール材を介して取付可能である。
また、上記の磁気検出モジュールの製造方法が提供される。この磁気検出モジュールの製造方法は、収納工程と、選択工程と、装着工程と、を含む。収納工程では、磁束を検出する一つ以上の磁気センサがケースに収納されケースアセンブリが製造される。選択工程では、取付対象であるハウジングの仕様に応じて、ケースアセンブリを単独で用いるか、又は、ハウジングの仕様毎に設定されるキャップをケースの端部に装着して用いるかが選択される。装着工程では、選択工程においてキャップをケースに装着することが選択された場合、キャップがケースに装着され固定される。
[第2群の開示]
本開示の検出装置は、ハウジングと、磁気検出モジュールと、を備える。ハウジングは、検出対象となる物理量の大きさに応じて発生する磁束を伝達する一組のヨークが内部に設けられた取付穴を有する。磁気検出モジュールは、ハウジングの取付穴に取り付けられ、ケースに収納された一つ以上の磁気センサによりヨークから伝達される磁束を検出する。一組のヨークは、互いに対向し磁気回路を形成するリング部を有する。
本開示の検出装置は、ハウジングと、磁気検出モジュールと、を備える。ハウジングは、検出対象となる物理量の大きさに応じて発生する磁束を伝達する一組のヨークが内部に設けられた取付穴を有する。磁気検出モジュールは、ハウジングの取付穴に取り付けられ、ケースに収納された一つ以上の磁気センサによりヨークから伝達される磁束を検出する。一組のヨークは、互いに対向し磁気回路を形成するリング部を有する。
ハウジングの取付穴は、開口側に形成される大穴、及び、大穴の奥に形成される小穴を有する。磁気検出モジュールは、筒部、並びに、センサ部を有する。筒部は、取付穴の内壁に対向し、大穴に挿入される大軸部、及び、小穴に挿入される小軸部を有する。なお、筒部は、ケースに一体に形成されてもよい。或いは、筒部は、ケースの端部に装着されたキャップの板状のキャップ本体により構成されてもよい。センサ部は、磁気センサが収納され、筒部の先端面から突出して一組のヨークのリング部同士の間に挿入される。
取付穴及び筒部の軸方向と直交する方向において、センサ部とリング部との最小間隔を「センサマージン」と定義する。大穴と大軸部との片側嵌合隙間、又は、小穴と小軸部との片側嵌合隙間のうち少なくとも一方は、センサマージンよりも小さく設定されている。
例えば「筒部」は、円筒状の「円筒部」として形成される。この場合、「大穴」、「小穴」、「大軸部」及び「小軸部」は、それぞれ、「大径穴」、「小径穴」、「大径部」及び「小径部」と読み替えられる。また、「筒部の軸方向と直交する方向」は、「円筒部の径方向」と読み替えられる。
これにより、本開示の検出装置は、磁気検出モジュールを取付穴へ挿入する時の位置ずれや傾きが抑制される。したがって、センサ部がハウジング側の部材であるヨークのリング部と干渉することが防止される。また、上記の検出装置においてハウジングに取り付けられる磁気検出モジュールが提供される。
本開示についての上記目的及びその他の目的、特徴や利点は、添付の図面を参照しながら下記の詳細な記述により、より明確になる。その図面は、
図1は、磁気検出モジュールが適用されるトルク検出装置の基本構成を説明する分解斜視図であり、
図2Aは、コラム搭載タイプ(非防水仕様)のハウジングの磁気検出モジュール取付部の正面図であり、
図2Bは、図2Aの斜視図であり、
図3Aは、ラック搭載タイプ(防水仕様)のハウジングの磁気検出モジュール取付部の正面図であり、
図3Bは、図3Aの斜視図であり、
図4は、第1実施形態による磁気検出モジュールの分解斜視図であり、
図5Aは、キャップ及びケースアセンブリの各断面図であり、
図5Bは、ケースアセンブリが単独で非防水仕様のハウジングに取り付けられたトルク検出装置の断面図であり、
図6Aは、ケースアセンブリにキャップを装着した磁気検出モジュールの側面図であり、
図6Bは、キャップが装着されたケースアセンブリが防水仕様のハウジングに取り付けられたトルク検出装置の断面図であり、
図7Aは、ケースアセンブリ単体の平面図であり、
図7Bは、図7AのVIIb矢視による正面面であり、
図8Aは、ケースアセンブリにキャップを装着した状態の平面図であり、
図8Bは、図8AのVIIIb矢視による正面面であり、
図9Aは、第1実施形態の第1変形例によるキャップがハウジングに取り付けられたトルク検出装置の模式断面図であり、
図9Bは、図9AのIXb-IXb線断面図であり、
図10は、図9Aのキャップが取り付けられるハウジングの取付穴の斜視図であり、
図11Aは、第1実施形態の第2変形例によるキャップがハウジングに取り付けられたトルク検出装置の模式断面図であり、
図11Bは、図11AのXIb-XIb線断面図であり、
図12は、図11Aのキャップが取り付けられるハウジングの取付穴の斜視図であり、
図13Aは、磁気検出モジュールをハウジングに取り付けた状態でのヨークと磁束誘導部材との間の磁気伝達作用を説明する平面図であり、
図13Bは、図13AのXIIIb矢視による側面図であり、
図14は、図13AのXIV-XIV線軸方向断面図であり、
図15は、基準線からの距離と磁気パーミアンスとの相関図であり、
図16は、磁気検出モジュールの製造方法のフローチャートであり、
図17Aは、ケースに磁気シールド部材が設けられた第2実施形態のケースアセンブリ単体の平面図であり、
図17Bは、磁気シールド部材及びケースアセンブリの各XVIIb-XVIIb線断面面であり、
図17Cは、磁気シールド部材が設けられた状態のケースアセンブリの断面面であり、
図18Aは、キャップに磁気シールド部材が設けられた第2実施形態の磁気検出モジュールの平面図であり、
図18Bは、図18AのXVIIIb-XVIIIb線断面面であり、
図19は、第3実施形態による磁気検出モジュールがハウジングに取り付けられたトルク検出装置の断面図であり、
図20は、第4実施形態による磁気検出モジュールがハウジングに取り付けられたトルク検出装置の断面図であり、
図21は、第3、第4実施形態の寸法関係を示す模式断面図(1)であり、
図22は、第3、第4実施形態の寸法関係を示す模式断面図(2)であり、
図23Aは、回転規制(誤組み付け防止)部の形状例1を示す図21、図22のA-A線断面での円筒部の断面図であり、
図23Bは、回転規制(誤組み付け防止)部の形状例1を示す図21、図22のB方向矢視によるハウジングの取付穴の正面図であり、
図24Aは、回転規制(誤組み付け防止)部の形状例2を示す図23Aに準ずる図であり、
図24Bは、回転規制(誤組み付け防止)部の形状例2を示す図23Bに準ずる図であり、
図25Aは、回転規制(誤組み付け防止)部の形状例3を示す図23Aに準ずる図であり、
図25Bは、回転規制(誤組み付け防止)部の形状例3を示す図23Bに準ずる図であり、
図26Aは、その他の実施形態のキャップを用いたキャップ及びケースアセンブリの各断面図であり、
図26Bは、その他の実施形態のキャップをケースアセンブリに装着した磁気検出モジュールの側面図であり、
図27は、トルク検出装置が適用される電動パワーステアリング装置の概略構成図である。
以下、検出装置及び磁気検出モジュールの複数の実施形態を図面に基づいて説明する。複数の実施形態で実質的に同一の構成には同一の符号を付して説明を省略する。本実施形態の検出装置は、電動パワーステアリング装置において操舵トルクを検出するトルク検出装置として機能する。また、本実施形態の磁気検出モジュールは、このトルク検出装置に適用される。第1、第2実施形態は、[第1群の開示]に対応する。第3、第4実施形態は、同じく[第2群の開示]に対応する。特に第3実施形態のうちシール材であるOリングが装着される形態は、[第1群の開示]にも対応する。
最初に図1を参照し、「検出装置」としてのトルク検出装置10の基本構成について説明する。トルク検出装置10は、磁気検出モジュール90を含み、入力されたトルクに応じて発生する磁束に基づきトルクを検出する。
トルク検出装置10は、車両に搭載されるハウジング40に収容される要素と、磁気検出モジュール90として構成されハウジング40に取り付けられる要素とからなる。ハウジング40に収容される要素には、トーションバー13、多極磁石14、一組のヨーク31、32等が含まれる。磁気検出モジュール90として構成される要素には、磁束誘導部材601、602及び磁気センサ71、72等が含まれる。
トーションバー13は、一端側が入力軸11に、他端側が出力軸12に、それぞれ固定ピン15で固定され、入力軸11と出力軸12とを中心軸Oの同軸上に連結する。トーションバー13は、棒状の弾性部材であり、ステアリングシャフト94に加わる操舵トルクを捩じれ変位に変換する。多極磁石14は、入力軸11に固定され、N極とS極とが周方向に交互に配置されている。
一組のヨーク31、32は、軟磁性体で形成され、多極磁石14の径外側で出力軸12に固定される。各ヨーク31、32は、軸方向にギャップを介して互いに対向するリング部35、36、及び、各リング部35、36の内周縁から相手のリング部に向かって軸方向に延びる複数の爪33、34を有する。多極磁石14のN極及びS極と同数の爪33、34がリング部35、36の内周縁に沿って全周に等間隔に設けられる。一方のヨーク31の爪33と他方のヨーク32の爪34とは、周方向にずれて交互に配置される。こうして、一組のヨーク31、32は、多極磁石14が発生する磁界内に磁気回路を形成する。
トーションバー13、多極磁石14、及び、一組のヨーク31、32は同軸に構成されるため、それらのいずれを基準として中心軸Oが定義されてもよい。本明細書では、磁束誘導部材601、602との対向関係が着目されるヨーク31、32を基準として、基本的に「ヨーク31、32の中心軸O」と記載する。また、実施形態の説明では、トーションバー13、多極磁石14、一組のヨーク31、32等の軸方向及び径方向を、単に「軸方向」及び「径方向」という。
磁気検出モジュール90の磁束誘導部材601、602は、軟磁性体で形成され、一組のヨーク31、32と本体600が軸方向に対向し、磁気回路の磁束を磁気センサ71、72に誘導する。本実施形態では、軸方向に互いに対向する一組の磁束誘導部材601、602が備えられる。
以下、説明の便宜上、図1において第1軸11側に配置されるヨーク31及び磁束誘導部材601を「上側のヨーク31」及び「上側の磁束誘導部材601」という。また、第2軸12側に配置されるヨーク32及び磁束誘導部材602を「下側のヨーク32」及び「下側の磁束誘導部材602」という。上側の磁束誘導部材601は上側のヨーク31に対向し、下側の磁束誘導部材602は下側のヨーク32に対向する。
本実施形態の一組の磁束誘導部材601、602は、本体600から分岐した二組の延接部61、62を有している。詳しくは、延接部61、62は、本体600からヨーク31、32の径方向外側に延びる。二つの磁気センサ71、72は、それぞれ延接部61、62の間に配置される。延接部61、62は、磁気センサ71、72が間に配置される部分においてギャップが最小となるように、軸方向に段差を有している。
磁気センサ71、72は、一組のヨーク31、32のリング部35、36から磁束誘導部材601、602により誘導された磁束を検出して電圧信号に変換し、ハーネスを経由して外部の処理装置に出力する。例えば磁気センサ71、72は、ホール素子、磁気抵抗素子等が樹脂モールドされた略直方体のICパッケージで構成されている。なお、本実施形態の磁気検出モジュール90は、二つの磁気センサ71、72を備え、操舵トルクとして二つの値を冗長的に処理装置に出力する。このような冗長構成とすることで、仮に磁気センサや演算回路の故障により一方の情報が使用不能となっても、処理装置は制御を継続することができる。
ここで図27を参照し、トルク検出装置が適用される電動パワーステアリング装置の概略構成について説明する。なお、図27に示す電動パワーステアリング装置100はコラムアシスト式であるが、ラックアシスト式電動パワーステアリング装置にも同様に適用可能である。
ハンドル93に接続されたステアリングシャフト94には操舵トルクを検出するためのトルク検出装置10が設置されている。ステアリングシャフト94の先端にはピニオンギア96が設けられており、ピニオンギア96はラック軸97に噛み合っている。ラック軸97の両端には、タイロッド等を介して、一対の車輪98が回転可能に連結されている。ステアリングシャフト94の回転運動は、ピニオンギア96によってラック軸97の直線運動に変換され、一対の車輪98が操舵される。
トルク検出装置10は、ステアリングシャフト94を構成する入力軸11と出力軸12との間に設けられ、ステアリングシャフト94に加わる操舵トルクを検出してECU91に出力する。ECU91は、検出された操舵トルクに応じて、モータ92の出力を制御する。モータ92が発生した操舵アシストトルクは、減速ギア95を介して減速され、ステアリングシャフト94に伝達される。
次に、ハウジング40に磁気検出モジュール90を取り付ける構造について説明する。本実施形態では、取付部の形状又は大きさが異なる二つの仕様のハウジング40を想定する。図2A、図2Bに示すハウジング401は、電動パワーステアリング装置のステアリングシャフトに設けられるコラム搭載タイプのハウジングである。図3A、図3Bに示すハウジング402は、ステアリングシャフト先端のピニオンギアと車輪とを連結するラック軸に設けられるラック搭載タイプのハウジングである。
ラック搭載タイプのハウジング402は、車両走行時等に路面から雨水等がかかる環境にあり、取付部の隙間からハウジング内部に水が浸入することを防止するため、取付部にシール材を設ける必要がある。一方、車室内に設けられるコラム搭載タイプのハウジング401では水が浸入するおそれがないため、取付部にシール材を設ける必要が無い。
つまり、車両におけるトルク検出装置10の搭載部位に応じて非防水仕様のハウジング401と防水仕様のハウジング402とが存在する。ハウジング401は「第1の仕様のハウジング」に相当し、ハウジング402は「第2の仕様のハウジング」に相当する。なお、本明細書において「防水」の「水」とは、純粋な水に限らず、ハウジングに浸入するおそれがある液体全般を意味するものとする。
ハウジング401、402は、いずれも軸Oを中心軸とする略円筒状を呈し、外周の一部に平坦な取付板400が形成されている。ハウジング401、402の説明において、便宜上、図2A、図3Aにおける上側を「上」、下側を「下」として記す。取付板400は、中心軸Oを含む平面に跨って取付穴41、42が形成されており、取付穴41、42の周方向両側にボルト等の固定用穴48が形成されている。二点鎖線は、図7B、図8Bに示すフランジ57が当接する部分を示し、固定用穴48は、フランジ57の固定用穴58の位置に対応する。
図2A、図2Bに示すように、コラム搭載タイプのハウジング401では取付穴41は略長方形状に形成されている。取付穴41の中央下部には一つの回転規制溝44が形成されており、取付穴41の両サイド上部には二つの回転規制溝45が形成されている。中央下部の回転規制溝44は比較的浅く形成されており、両サイド上部の回転規制溝45は比較的深く形成されている。回転規制溝44、45の機能については図5Bを参照して後述する。
図3A、図3Bに示すように、ラック搭載タイプのハウジング402では、取付穴42は、深さ方向の奥側にある略長方形のケース穴421、深さ方向の真ん中にある円形のシール穴422、端面側にある円形のインロー穴423から構成されている。また、インロー穴423の中央上部には、インロー穴423に連続して一つの回転規制溝471が形成されている。回転規制溝471の機能については図6Bを参照して後述する。
このように取付部の形状や大きさが異なる二種類のハウジング401、402に対する磁気検出モジュール90の仕様として、それぞれ専用のケースを製造することもできる。しかし、その場合、二種類の樹脂成形金型が必要となったり、二種類のケースの生産調整や在庫管理工数が発生したりする。そこで第1、第2実施形態では、共通の構成要素を用いた簡易な構成変更により、仕様が異なる二種類のハウジング401、402へ選択的に取付可能な磁気検出モジュールを提供することを目的とする。
(第1実施形態)
続いて、第1実施形態の磁気検出モジュールの具体的構成について説明する。第1実施形態は、ケース共用化に関する基本的な技術的思想が反映されたものであり、第2実施形態は、第1実施形態に対し、外部からの磁気ノイズを遮断する磁気シールド部材をさらに備えるものである。以下、各実施形態の検出装置、及び磁気検出モジュールの符号について、「10」及び「90」に続く3桁目に実施形態の番号を付す。構成部材の符号については、その実施形態に特有の構成の場合、同様に3桁目に実施形態の番号を付し、前述の実施形態と実質的に同じ構成の場合、前述の実施形態の符号を援用する。
続いて、第1実施形態の磁気検出モジュールの具体的構成について説明する。第1実施形態は、ケース共用化に関する基本的な技術的思想が反映されたものであり、第2実施形態は、第1実施形態に対し、外部からの磁気ノイズを遮断する磁気シールド部材をさらに備えるものである。以下、各実施形態の検出装置、及び磁気検出モジュールの符号について、「10」及び「90」に続く3桁目に実施形態の番号を付す。構成部材の符号については、その実施形態に特有の構成の場合、同様に3桁目に実施形態の番号を付し、前述の実施形態と実質的に同じ構成の場合、前述の実施形態の符号を援用する。
図4~図8Bを参照し、第1実施形態のトルク検出装置101、及び磁気検出モジュール901の構成を説明する。磁気検出モジュール901は、ケースアセンブリ500と、キャップ801とを備える。ケースアセンブリ500は、ケース501、及び、ケース501の箱部51に収納された磁束誘導部材601、602、磁気センサ71、72、基板70等を備える。磁束誘導部材601、602、及び磁気センサ71、72については、図1を参照して上述した通りである。基板70は、磁気センサ71、72の他にセンサ信号の出力回路等が搭載される。
ケース501は、樹脂で成形され、直方体状の箱部51、外部の処理装置に信号を伝送するハーネスが接続されるコネクタ部56、及び、ハウジング401、402への取付時の固定用穴58が形成されたフランジ部57等を有する。箱部51の底とコネクタ部56の底との間には、基板70に接続される端子73がインサート成形されている。磁気センサ71、72が搭載された略長方形の基板70は、箱部51の底に設置される。
以下、説明の便宜上、箱部51の開口端52側を上とし、箱部51の底側を下とする。また、箱部51の磁気センサ71、72が搭載される側を前方とし、コネクタ部56側を後方とする。箱部51のフランジ部57から前方に位置するケース501の端部は挿入部53をなしている。[図面の簡単な説明]の欄では、開口端52側から視た図を平面図と表し、挿入部53側から視た図を正面図と表す。以下の説明で、「平面視にて」は「開口端52側から視たとき」の意味で用いる。
図7A、図7B等に示すように、挿入部53は、前壁531、側壁532、底壁533を含む直方体状である。両側の側壁532の開口端52側の縁には、上方に突出する「誤組み付け防止部」兼「回転規制部」としての突起部55が形成されている。また、箱部51の下面において、左右方向における中央部であって、前後方向におけるフランジ部57の近傍に、下方に突出する「誤組み付け防止部」兼「回転規制部」としての突起部54が形成されている。
「誤組み付け防止部」は、ケース501又はキャップ801をハウジング40に組み付けるとき所定の相対角度に位置する姿勢のみで組み付け可能とし、所定の相対角度以外に位置する姿勢での誤組み付けを防止する。「回転規制部」は、ケース501又はキャップ801をハウジング40に組み付けた後のハウジング40に対する回転を規制する。
一組の磁束誘導部材601、602は、それぞれ、平面視にて長方形帯状であり磁束を集める本体600と、本体600から直交方向に延びる二つの延設部61、62を有し、各延設部61、62が磁気センサ71、72を上下方向に挟むように設置される。言い換えれば磁気センサ71、72は、一組の磁束誘導部材601、602の間に配置される。磁束誘導部材601、602は、ハウジング40内に設けられる筒状のヨーク31、32のリング部35、36に本体600の少なくとも一部が対向し、ヨーク31、32に形成された磁気回路から磁束を誘導する。以下、磁束誘導部材601、602の長方形帯状の形状を簡単に「直線状」と表す。磁束誘導部材601、602の詳細な構成及び作用については後述する。
磁束誘導部材601、602、磁気センサ71、72、基板70が収納された後、ケース501の箱部51は、開口端52から溶融樹脂でポッティングされ、収納部品が固定される。また、図6Bに破線で示すように、開口端52を塞ぐフタ59が別部品として用いられてもよい。その場合、上側の磁束誘導部材601は、フタ59と一体にインサート成形可能である。なお、他の実施形態では、フタ59を用いず溶融樹脂のポッティングのみ、或いは、ポッティングせずフタ59のみで開口端52を塞いでもよい。
こうして、ケース501に磁束誘導部材601、602、磁気センサ71、72、基板70が収納されたケースアセンブリ500が構成される。ケースアセンブリ500は、単独で非防水仕様のハウジング401に取付可能である。また、挿入部53にキャップ801が装着された状態で、防水仕様のハウジング402に取付可能である。非防水仕様のハウジング401に取り付けられる場合、単独のケースアセンブリ500が「磁気検出モジュール」を構成する。なお、キャップ801が装着される相手は製造工程的にはケースアセンブリ500であるが、部品単位での観点から、「キャップ801はケース501に装着される」と表すこともできる。
キャップ801は、樹脂で成形され、円板状のキャップ本体811のケース501側の端面に、ケース501の挿入部53が挿入される受容穴83が形成されている。受容穴83は、ケース501の挿入部53の形状に対応した長方形状に開口しており、受容穴83の深さは、キャップ本体811の厚さよりも深い。受容穴83の両サイド上部には、突起部55が挿入される突起収容溝85が形成されている。これにより、挿入部53を受容穴83に挿入する際、180°反対向きに挿入することが防止される。
キャップ本体811のケース501とは反対側の端面には、端面に接続し、受容穴83の底部を覆って袋状とする封止部84が形成されている。封止部84は、キャップ本体811からケース501とは反対側に直方体状に突出し、外壁が受容穴83の底部の内壁に対し一回り大きく形成されている。要するに、封止部84の外壁と受容部83の内壁との間は、水が漏れないように連通が遮断されている。
キャップ本体811の外周には、受容穴83の開口面側の外鍔部863、及び、封止部84の突出側の内鍔部88が平行に設けられ、外鍔部863と内鍔部88との間に外周溝82が形成されている。外鍔部863の中央上部には径外方向に突出する「誤組み付け防止部」兼「回転規制部」としての突起部871が形成されている。
外周溝82には、「シール材」としてのOリング89が装着される。このとき、Oリング89の内周面は外周溝82の底壁に当接する。Oリング89は、キャップ801とケース501とを組み付ける前に外周溝82に装着されてもよく、キャップ801とケース501とを組み付けた後に外周溝82に設けられてもよい。
図5Bに、ケースアセンブリ500が単独で非防水仕様のハウジング401の取付穴41に取り付けられたトルク検出装置101を示す。ケース501の挿入部53は略長方形の取付穴41に挿入される。このとき、下部の突起部54が回転規制溝44に挿入され、上部両サイドの突起部55が回転規制溝45に挿入される。したがって、ケースアセンブリ500がハウジング401に組み付けられるとき、取付穴41に180°反対向きに誤組み付けされることが防止される。また、組み付け後、ハウジング401に対するケースアセンブリ500の回転が規制される。
図6Bに、ケースアセンブリ500にキャップ801が装着された磁気検出モジュール901が防水仕様のハウジング402の取付穴42に取り付けられたトルク検出装置101を示す。キャップ801の封止部84は略長方形のケース穴421に挿入され、内鍔部88はシール穴422に挿入され、外鍔部863はインロー穴423に挿入される。このとき、突起部871が回転規制溝471に挿入されることで、磁気検出モジュール901がハウジング402に組み付けられるとき、取付穴42に180°反対向きに誤組み付けされることが防止される。また、組み付け後、ハウジング402に対する磁気検出モジュール901の回転が規制される。
取付穴42に取り付けられた状態で、Oリング89の外周面はシール穴422の内壁に押し付けられる。したがって、両方向矢印Cpで示すように、Oリング89は、径方向に圧縮され、軸シールに用いられる。軸シールは面シールに比べ、シール関連部品の寸法ばらつきや組付時の傾きの影響を受けにくくシール機能に優れている。
次に図9A~図12を参照し、キャップ801とハウジング402との取付における「誤組み付け防止部」及び「回転規制部」の構成が異なる第1実施形態の変形例について説明する。図9A、図11Aは、キャップ801をハウジング402に取り付けた状態を示す模式断面図である。模式断面図では、キャップ801とケース501とを融合した模式的な断面を示し、図6Bのような内部構造の正確な図示を省略する。また、キャップ本体811の先端面から突出する袋部84に覆われた角柱状の部分を「センサ部840」と記す。センサ部840には磁気センサ71、72が収納される。ここで、「収納される」には、モールドされる構成が含まれる。
図9B、図11Bは、キャップ801の基端側において、キャップ801又はハウジング402に設けられた「誤組み付け防止部」及び「回転規制部」を示す径方向断面図である。図10、図12は、図3Bに対応するハウジング402の取付穴42の斜視図である。
図9A~図10に示す第1変形例では、キャップ本体811の上部に図4等と同様の突起部871が形成されると共に、キャップ本体811の下部に、所定の間隔を隔てて径外方向に略平行に突出する一対の双突起部872が形成される。ハウジング402の端面には、双突起部872に挟まれる回転規制凸部472が形成されている。一方、ハウジング402の端面の突起部871に対応する部分は、凹凸の無い平坦な端面となっている。
双突起部872が回転規制凸部472を挟む回転位置でキャップ801がハウジング402に組み付けられることで、双突起部872は「回転規制部」として機能する。また、キャップ801をハウジング402に組み付けるとき、回転方向の位置を180°誤った位置で組み付けようとすると、突起部871がハウジング402の回転規制凸部472に干渉するため、「誤組み付け防止部」として機能する。このように第1変形例では、キャップ本体811の突起部871及び双突起部872が、それぞれハウジング402の回転規制凸部472を利用して「誤組み付け防止部」及び「回転規制部」の機能を分担する。
図11A~図12に示す第2変形例では、キャップ本体811の下部に径外方向に突出する突起部874が形成される。キャップ本体811の上部は凹凸の無い単純な円筒面となっている。ハウジング402は、取付穴42の下方の台座部46に、突起部874の先端が係合する回転規制溝474が形成されている。また、回転規制溝474とは反対側の取付穴42の縁部に干渉凸部473が形成されている。
突起部874の先端が回転規制溝474に係合する回転位置でキャップ801がハウジング402に組み付けられることで、突起部874は「回転規制部」として機能する。また、キャップ801をハウジング402に組み付けるとき、回転方向の位置を180度誤った位置で組み付けようとすると、突起部874がハウジング402の干渉凸部473に干渉するため、「誤組み付け防止部」として機能する。このように第2変形例では、キャップ本体811の突起部874が、ハウジング402の干渉凸部473を利用して「誤組み付け防止部」として機能し、且つ、ハウジング402の回転規制溝474を利用して「回転規制部」として機能する。
次に図13A~図14を参照し、本実施形態の磁束誘導部材601、602の構成について説明する。図13A~図14には、ケースアセンブリ500をハウジングに取り付けた状態でのヨーク31、32と、磁束誘導部材601、602及び磁気センサ71、72との間の磁束伝達作用を平面図、側面図、軸方向断面図の三図によって示す。平面図は軸方向の第1軸11側から視た図を意味し、側面図は径方向から視た図を意味する。
「平面図」は、厳密には上側の磁束誘導部材601の上部で多極磁石14及びヨーク31、32の爪33、34を切断した径方向断面図であるが、磁束誘導部材601の視点から「平面図」と記す。また、径方向断面視にて実際に環が見えるのは下側のヨーク32のみであるが、説明の都合上、上側のヨーク31を含めて符号を「31、32」と付す。
図13Aの平面図には、中心軸Oを通って左右方向に延びる「基準線X」が記載される。基準線Xは、二つの磁気センサ71、72の中間位置と中心軸Oとを結ぶ仮想直線と定義される。言い換えれば、二つの磁気センサ71、72は、基準線Xに対して対称に配置される。なお、磁気センサが一つの形態では、基準線Xは、磁気センサと中心軸Oとを結ぶ仮想直線と定義される。
図13Bの側面図は、基準線Xに沿って磁気センサ71、72を径方向外側から視た図である。二点鎖線は爪33、34の外形を示す。側面図では、トーションバー13、多極磁石14の図示を省略する。図14の軸方向断面図は、中心軸O及び基準線Xを含む平面での断面図である。軸方向断面図ではトーションバー13の図示を省略し、多極磁石14は外形線のみを示す。
本実施形態では、平面視にて、磁束誘導部材601、602の本体は、基準線Xに対して対称な長方形帯状、すなわち直線状に形成されている。磁束誘導部材601、602の長手方向の辺は、基準線Xに直交する直線である。
磁束誘導部材601、602は、本体600から径方向外側に延びる延設部61、62を有しており、「本体600における延接部61、62への分岐部位」をS部と記す。「延接部61、62への分岐部位」は、実質的に磁気センサ71、72の近傍を意味する。なお、「S部」は多極磁石14のS極と同じ記号であるが、それらの区別は自明であり、混同のおそれはない。また、基準線Xを挟み、磁束誘導部材601、602の本体600とヨーク31、32との対向範囲におけるヨーク31、32の周方向両端に対応する部位を「本体600の周端部63、64」と定義し、図中、破線ハッチングで示す。S部から中心軸Oまでの距離dsは、周端部63、64から中心軸Oまでの距離deよりも短い。
側面視及び軸方向断面視にて、磁束誘導部材601、602は、軸方向の内側において一定のギャップでヨーク31、32の環状面に対向し、その対向面積は、磁気センサ7172に近い中間部65で相対的に大きく、周端部63、64に向かうほど小さくなる。延設部61、62への分岐部位であるS部では、周端部63、64に比べ対向面積が大きいため、磁束誘導部材601、602とヨーク31、32との間の単位面積当たりの磁気パーミアンスが大きくなる。ここで、「単位面積当たり」の意味は、部位毎に磁気パーミアンスを比較する範囲の面積を同一とすることを明確に記すことにある。以下の説明では、都度の「単位面積当たり」の記載を省略し、「磁気パーミアンス」とは「単位面積当たりの磁気パーミアンス」を意味するものとして解釈する。
二つの磁気センサ71、72は、それぞれ延接部61、62の間に配置される。延接部61、62は、磁気センサ71、72が間に配置される部分においてギャップが最小となるように軸方向に折り曲げられ、段差を有している。
次に図15を参照し、この構成により信号が大きくなる理由を説明する。図15に、磁束誘導部材601、602とヨーク31、32との間の磁気パーミアンスについて、基準線Xからの距離または回転角度と磁気パーミアンスとの相関図を示す。磁気パーミアンスPは、材の透磁率μ、対向面積A、ギャップ長Lを用いて、式(1)で表される。
P=μ(A/L) ・・・(1)
P=μ(A/L) ・・・(1)
ここで、磁束誘導部材601、602は単一の軟磁性材質で形成されることを前提とすると、磁束誘導部材601、602とヨーク31、32との対向面積Aが大きいほど、又は、ギャップ長Lが短いほど、磁気パーミアンスPは大きくなる。本実施形態では、磁束誘導部材601、602とヨーク31、32とのギャップは一定であるが、対向面積が中間部65から周端部63、64に向かうほど小さくなるため、中間部65の磁気パーミアンスが周端部63、64の磁気パーミアンスよりも大きくなる。その相関特性は、図15中、P1のような直線、P2のような変曲点の無い単純な曲線、P3のようなS字曲線或いはステップ状の折れ線等、どのような特性であってもよい。
磁気センサ71、72は、中間部65の近くの本体600から分岐した延設部61、62に設置され、磁束誘導部材601、602の本体600における延接部61、62への分岐部位は、実質的に「磁気センサ71、72の近傍」を意味する。そして、磁束誘導部材601、602は、延接部61、62への分岐部位で、周端部63、64に比べ、「磁束誘導部材601、602とヨーク31、32との間の単位面積当たりの磁気パーミアンス」が大きくなるように構成されている。これにより、磁気センサ71、72の信号を大きくすることができる。
次に図16のフローチャートを参照し、磁気検出モジュールの製造方法について説明する。フローチャートの説明で記号Sは「ステップ」を表す。S10の収納工程では、磁束誘導部材601、602、磁気センサ71、72、基板70等がケース501の箱部51に収納される。そして、例えば箱部51の残りの空間に溶融樹脂がポッティングされ、磁気センサ71、72が固定される。また、箱部51にフタ58が被せられてもよい。こうして収納工程S10で、ケースアセンブリ500が製造される。
S20の選択工程では、取付対象であるハウジングの仕様に応じて、ケースアセンブリ500を単独で用いるか、又は、ハウジングの仕様毎に設定されるキャップ801をケース501の端部に装着して用いるかが選択される。第1実施形態では、シール材が不要な非防水仕様のハウジング401、又は、シール材を要する防水仕様のハウジング402のいずれに取り付けられるかが選択されるものとする。
S25では選択結果が判断される。防水仕様のハウジング402に取り付けられる場合、S25でYESと判定され、S30の装着工程に移行する。非防水仕様のハウジング401に取り付けられる場合、S25でNOと判定され、処理を終了する。この場合、ケースアセンブリ500は、キャップ801が装着されることなく単独で用いられる。
S30の装着工程では、キャップ801がケース501に装着され固定される。第1実施形態の構成では、ケース501の端部に形成された挿入部53が、キャップ801に形成された受容穴83に挿入される。その後、ケース501の挿入部53とキャップ801の受容穴83との接合部がレーザ溶着等により溶着される。ここで、図4~図8Bに示される受容穴83の底部を覆って袋状とする封止部84が設けられない構成においても、磁気センサ71、72を囲む接合部が一周溶着されることで、受容穴83の底部からの漏水を防止することができる。
装着工程においてキャップ801は接着剤で固定されてもよい。また、収納工程で溶融樹脂がポッティングされる場合、ポッティングの硬化と接着剤の硬化とは同時に行われることが好ましい。これにより、サイクルタイムを短縮することができる。
以上のように第1実施形態の磁気検出モジュール901は、キャップ801の有無によりハウジング40への取付仕様を変更可能である。具体的には、防水仕様のハウジング402に対してはシール材89が設けられるキャップ801がケース501に装着された磁気検出モジュールが供給される。また、非防水仕様のハウジング401に対してはキャップ801が装着されないケースアセンブリ501が単独で磁気検出モジュールとして供給される。よって、例えばケース501を樹脂成形により製造する場合、ケース501の金型は一種類でよく、在庫管理も簡易になる。
(第2実施形態)
次に図17A~図18Bを参照し、磁気シールド部材が設けられた第2実施形態の磁気検出モジュール902について説明する。磁気シールド部材は、鉄やパーマロイ等の軟磁性体で形成され、外部からの磁気ノイズを遮断する。
次に図17A~図18Bを参照し、磁気シールド部材が設けられた第2実施形態の磁気検出モジュール902について説明する。磁気シールド部材は、鉄やパーマロイ等の軟磁性体で形成され、外部からの磁気ノイズを遮断する。
図17A~図17Cに示す形態は、非防水仕様のハウジング401に単独で取り付けられるケースアセンブリ500の挿入部53に長方形枠状の磁気シールド部材37が設けられている。詳しくは、ケース501に溶融樹脂がポッティングされた後、磁気センサ71、72を四方から囲むように磁気シールド部材37が被せられる。したがって、磁気センサ71、72に向かう磁気ノイズが効果的に遮断される。
図18A、図18Bに示す形態は、防水仕様のハウジング402に取り付けられる磁気検出モジュール902のキャップ801に、一対のアーチ状の磁気シールド部材38が設けられている。一対の磁気シールド部材38は、封止部84を上下方向から囲むように設けられる。図18Bに示すように、磁気シールド部材38は、奥行き方向の中心線Dsが磁気センサ71、72に重なるように配置される。したがって、磁気センサ71、72に向かう磁気ノイズが効果的に遮断される。
(第3実施形態)
次に図19を参照し、第3実施形態について説明する。第3実施形態のトルク検出装置103は、内壁が円筒状の取付穴42を有するハウジング402と、取付穴42に取り付けられた磁気検出モジュール903と、を備える。図19には図示しないが、ハウジング402の内部には、トルクの大きさに応じて発生する磁束を伝達する一組のヨーク31、32が設けられている。磁気検出モジュール903は、一つ以上の磁気センサ71、72により、ヨーク31、32から伝達される磁束を検出する。
次に図19を参照し、第3実施形態について説明する。第3実施形態のトルク検出装置103は、内壁が円筒状の取付穴42を有するハウジング402と、取付穴42に取り付けられた磁気検出モジュール903と、を備える。図19には図示しないが、ハウジング402の内部には、トルクの大きさに応じて発生する磁束を伝達する一組のヨーク31、32が設けられている。磁気検出モジュール903は、一つ以上の磁気センサ71、72により、ヨーク31、32から伝達される磁束を検出する。
第3実施形態の磁気検出モジュール903は、第1実施形態と同様に、ケース501の先端に円板状のキャップ803が装着されている。キャップ803におけるキャップ本体813の外周面は、取付穴42の内壁に対向する。ただし、第1実施形態のキャップ801では、外鍔部863と内鍔部88との間に外周溝82が形成されているのに対し、第3実施形態のキャップ803には内鍔部が設けられておらず、径方向の段差部823が外周に形成されている。図19の例では、段差部823に、軸シール用のシール材としてOリング89が装着されているが、他の実施例ではOリング89は無くてもよい。段差部823は、キャップ本体813の基端側の大径部866と、先端側の小径部865との段差により構成される。大径部866及び小径部865は、「大軸部」及び「小軸部」に相当する。
取付穴42は、端面428側に対して奥から順に、ケース穴424、小径穴425、大径穴426、面取り部427を有する。大径穴426及び小径穴425は、「大穴」及び「小穴」に相当する。キャップ803の大径部866は大径穴426に挿入され、小径部865は小径穴425に挿入される。大径部866の基端側には、ハウジング402の端面428に当接する鍔部868が形成される。また、キャップ本体813の先端面からセンサ部840が突出している。センサ部840の先端は、一組のヨーク31、32のリング部35、36同士の間に挿入される。
第3実施形態のトルク検出装置103では、大径部866と大径穴426、又は小径部865と小径穴425との嵌合隙間と、センサ部840とヨークのリング部との隙間との寸法関係が適切に調整される。その寸法関係に関する構成及び作用効果は、次の第4実施形態のトルク検出装置104による構成及び作用効果と同じであるため、第4実施形態において一緒に説明する。
(第4実施形態)
次に図20を参照し、第4実施形態について説明する。第4実施形態のトルク検出装置104は、内壁が円筒状の取付穴42を有するハウジング402と、取付穴42に取り付けられた磁気検出モジュール904と、を備える。第3実施形態と同様に、ハウジング402の内部には、トルクの大きさに応じて発生する磁束を伝達する一組のヨーク31、32が設けられている。磁気検出モジュール904は、一つ以上の磁気センサ71、72により、ヨーク31、32から伝達される磁束を検出する。
次に図20を参照し、第4実施形態について説明する。第4実施形態のトルク検出装置104は、内壁が円筒状の取付穴42を有するハウジング402と、取付穴42に取り付けられた磁気検出モジュール904と、を備える。第3実施形態と同様に、ハウジング402の内部には、トルクの大きさに応じて発生する磁束を伝達する一組のヨーク31、32が設けられている。磁気検出モジュール904は、一つ以上の磁気センサ71、72により、ヨーク31、32から伝達される磁束を検出する。
磁気検出モジュール904は、複数のハウジングへ選択的に取付可能とすることを目的としておらず、取付対象は、内壁が円筒状の取付穴42を有するハウジング402に限られる。第4実施形態では、ハウジング402への磁気検出モジュール904の挿入時に、センサ部840とハウジング402側の部材との干渉を防止することが目的とされる。そのため、第4実施形態の磁気検出モジュール904は、別部材のキャップがケースの端部に装着される構成ではなく、一体のケース504により構成されている。ケース504は、図19に示す第3実施形態においてケース501にキャップ803が装着された状態と同等の形状に、樹脂で一体に形成されている。つまり、ケース501とキャップ803とを融合したものが第4実施形態の一体のケース504である。
第3実施形態のキャップ803のキャップ本体813に相当する部分を、第4実施形態では「円筒部814」と呼ぶ。円筒部814は、「筒部」に相当し、取付穴42の内壁に対向する。また、円筒部814の先端面からセンサ部840が突出している。逆に言えば、第4実施形態のケース504の円筒部814が別部材のキャップ803のキャップ本体813により構成された形態が、第3実施形態に相当する。要するに、第3実施形態のうちOリング89が装着される形態は、「防水仕様及び非防水仕様の複数のハウジングへの選択的取付」及び「磁気センサとハウジング側部材との干渉防止」の二つの目的を両立するものと位置づけられる。
したがって、第4実施形態の円筒部814、及び、円筒部814が対向する取付穴42の構成は、第3実施形態のキャップ本体813、及び、キャップ本体813の外周面が対向する取付穴42の構成と実質的に同じである。取付穴42は、開口側に形成される大径穴426、及び、大径穴426の奥に形成される小径穴425を有する。
円筒部814は、基端側から磁気センサ71、72が配置される先端側に向かって、ハウジングの端面428に当接する鍔部868、大径穴426に挿入される大径部866、及び、小径穴425に挿入される小径部865を有する。図20の例では、小径部865の外周にシール材としてOリング89が装着されているが、他の実施例ではOリング89は無くてもよい。Oリング89は、小径穴425の内壁との間で軸シールに用いられる。
次に図21、図22を参照し、第3実施形態のトルク検出装置103におけるキャップ本体813と取付穴42の内径との寸法関係、又は、第4実施形態のトルク検出装置104における円筒部814の外径と取付穴42の内径との寸法関係について説明する。この部分の説明では、代表として、第4実施形態の「円筒部814」等の用語を用いる。第3実施形態については、例えば「円筒部814」を「キャップ本体813」に読み替えればよい。
図21、図22のトルク検出装置104の断面図示は、図9A、図11Aと同様に模式的なものである。円筒部814の先端面から突出する角柱状の部分である「センサ部840」には、磁気センサ71、72が収納される。「収納される」には、モールドされる構成が含まれる。磁気検出モジュール904の取付穴42への挿入時に、位置ずれや傾きにより、センサ部840がハウジング402側の部材と干渉すると、磁気センサ71、72の破損や特性変化が生じるおそれがある。そこで第4実施形態では、センサ部840とハウジング402側の部材との干渉を防止する。
具体的には、センサ部840は、一組のヨーク31、32の互いに対向するリング部35、36同士の間に挿入される。リング部35、36の間に生じる磁束がセンサ部840を通過することで、磁気センサ71、72が磁束を検出する。センサ部840とリング部35、36との最小間隔を「センサマージンμ」と定義する。図21、図22に示すように、リング部35、36の中心に対してセンサ部840の位置が偏っていない場合には、センサマージンμは、リング部35、36間の距離からセンサ部840の厚さを差し引いた長さの2分の1となる。
図21及び図22は、径の寸法関係が異なる2パターンの実施例を示す。各部の寸法の記号を以下のように定義する。「片側嵌合隙間」は、穴の直径と軸の直径との嵌合隙間の2分の1に相当する。記号中の文字「h」はハウジング、「s」はセンサを表す。
φDh1:大径穴426の内径(=φds1+2×ε1)
φds1:大径部866の外径
ε1:大径穴426と大径部866との片側嵌合隙間
φDh2:小径穴425の内径(=φds2+2×ε2)
φds2:小径部865の外径
ε2:小径穴425と小径部865との片側嵌合隙間
φDh1:大径穴426の内径(=φds1+2×ε1)
φds1:大径部866の外径
ε1:大径穴426と大径部866との片側嵌合隙間
φDh2:小径穴425の内径(=φds2+2×ε2)
φds2:小径部865の外径
ε2:小径穴425と小径部865との片側嵌合隙間
図21に示す実施例では、大径穴426と大径部866との片側嵌合隙間ε1が例えば0.1ミリ未満の微小隙間に設定される。つまり、大径穴426と大径部866との嵌合がインロー構造となっている。したがって、円筒部814が取付穴42に挿入されるときの同軸度、直角度等の精度が確保される。また、隙間ε1は、センサマージンμよりも小さく設定されている(ε1<μ)。好ましくは、隙間ε1は、センサマージンμよりも極めて小さく設定されている(ε1<<μ)。なお、小径穴425と小径部865との片側嵌合隙間ε2は、隙間ε1と同等以上であればよい。
この構成における円筒部814及び取付穴42の軸方向寸法について、大径穴426の挿入端(すなわち、面取り部427と大径穴426との境界)からヨーク31、32のリング部35、36の外縁までの距離を「ハウジング側距離Lh1」と定義する。また、大径部426と小径部425との境界からセンサ部840の先端までの距離を「センサ側距離Ls1」と定義する。ハウジング側距離Lh1は、センサ側距離Ls1より長く設定されている。
このような寸法設定により、円筒部814の軸が取付穴42の軸に対して最大に傾き、周方向の片側で大径部866の外壁が大径穴426の内壁に接触した場合でも、センサ部840の先端位置の変動はセンサマージンμよりも小さく抑えられる。したがって、磁気検出モジュールの挿入時に、センサ部840とハウジング側部材であるヨーク31、32との干渉を防止することができる。
図22に示す実施例では、小径穴425と小径部865との片側嵌合隙間ε2が例えば0.1ミリ未満の微小隙間に設定される。つまり、小径穴425と小径部865との嵌合がインロー構造となっている。したがって、円筒部814が取付穴42に挿入されるときの同軸度、直角度等の精度が確保される。また、隙間ε2は、センサマージンμよりも小さく設定されている(ε2<μ)。好ましくは、隙間ε2は、センサマージンμよりも極めて小さく設定されている(ε2<<μ)。なお、大径穴426と大径部866との片側嵌合隙間ε1は、隙間ε2と同等以上であればよい。
この構成における円筒部814及び取付穴42の軸方向寸法について、小径穴425の挿入端(すなわち、大径穴426と小径穴425との境界)からヨーク31、32のリング部35、36の外縁までの距離を「ハウジング側距離Lh2」と定義する。また、円筒部814の先端面からセンサ部840の先端までの距離を「センサ側距離Ls2」と定義する。ハウジング側距離Lh2は、センサ側距離Ls2より長く設定されている。
このような寸法設定により、円筒部814の軸が取付穴42の軸に対して最大に傾き、周方向の片側で小径部865の外壁が小径穴425の内壁に接触した場合でも、センサ部840の先端位置の変動はセンサマージンμよりも小さく抑えられる。したがって、磁気検出モジュールの挿入時に、センサ部840とハウジング側部材であるヨーク31、32との干渉を防止することができる。
次に図23A~図25Bを参照し、取付穴42に対する円筒部814の回転規制及び誤組み付け防止の構成について説明する。例えば特許文献2(特許第4753545号公報)の従来技術では、磁性リングが磁気ヨークの径外方向に配置され、磁気ヨークと径方向に対向している。この構成では、位置決めにより、磁性リングと磁気ヨークとの同心度を確保することが有効であるが、回転方向の位置精度は性能に対してあまり影響しない。それに対し、一組のヨーク31、32のリング部35、36同士の間に磁気センサ71、72が配置される第4実施形態のトルク検出装置104では、取付穴42に対する円筒部814の回転方向の位置決めが重要となる。また、磁気検出モジュール904を例えば180°誤った方向に組付けられることを防止することが重要となる。
図23A、図24A、図25Aは、図21、図22のA-A線断面での円筒部814の断面を示す。図23B、図24B、図25Bは、図21、図22のB方向矢視によるハウジングの取付穴の正面視を示す。なお、図23A~図25Bの各形状に応じた図21、図22の組付断面の変更箇所については、図示を省略する。また、例えば防水不要のコラム搭載タイプに用いられる場合、各図においてOリング89を無くしてもよい。
図23A、図23Bに示す例では、大径部866の周方向の一箇所に径外方向に突出する突起部875が形成されている。また、取付穴42の対応する箇所に回転規制溝475が形成されている。この構成例は、図3A、図3B、図4等の突起部871及び回転規制部471の構成例と類似している。ただし、図4の例では、インロー穴423に挿入された外鍔部863の外周に突起部871が形成されているのに対し、図23Aの例では、大径部866の外周に突起部875が形成されている点が異なる。このように、円筒部814の外周面のどの部分に突起部が形成されても本質的な違いは無い。
この例では、突起部875が回転規制溝475に係合することにより、円筒部814の回転が規制される。また、円筒部814と取付穴42との相対角度が正規の角度に位置する姿勢のみで組み付け可能とし、所定の相対角度以外に位置する姿勢での誤組み付けを防止する。このように突起部875及び回転規制溝475は、「誤組み付け防止部」兼「回転規制部」として機能する。
図24A、図24Bに示す例では、大径部866の周方向の一方に平坦部876が形成されている。また、取付穴42の対応する箇所に回転規制凹部476が形成されている。平坦部876は、突起部875の幅を広げ、且つ、大径部866の外径に対する突出長を短く変形した形態に相当する。図24Aの例では、大径部866の外径に対する平坦部876の突出長をほぼ0としている。また、大径部866の外径よりもマイナス側(すなわち中心側)に平坦部876を形成し、大径部866の外周形状について、周方向の一部を直線で結んだD字状としてもよい。この例では、平坦部876が回転規制凹部476に係合することにより、平坦部876及び回転規制凹部476は、「誤組み付け防止部」兼「回転規制部」として機能する。
図25A、図25Bに示す例では、円形の大径部866に対し径外方向に離れた位置に分離部877が形成されている。分離部877は、二点鎖線で示す連結部878を介して、鍔部868と連結されている。また、取付穴42の対応する箇所に回転規制穴477が形成されている。例えばハウジング402に後加工で回転規制穴477を形成するような場合、形状が単純であるため加工が容易である。この例では、分離部877が回転規制穴477に嵌合することにより、分離部877及び回転規制穴477は、「誤組み付け防止部」兼「回転規制部」として機能する。
図23A~図25Bの各構成において、突起部875、平坦部876、分離部877の位置は図示位置に限らず、周方向のどの位置でもよい。また、これらが周方向に複数配置されてもよい。ただし、「誤組み付け防止部」として機能させる場合、回転対称となる複数の位置が存在しないように、回転非対称な位置に複数配置される必要がある。さらに、図9A~図12に示す第1実施形態の変形例のように、ハウジング402側に凸部が設けられてもよい。
(その他の実施形態)
(a)図4~図8Bに示す形態のキャップ801は、先端部に袋状の封止部84が形成されているのに対し、図26に示す磁気検出モジュール905のように、先端が袋状になっていないキャップ805を用いてもよい。先端に封止部84が形成される形態に比べ、この形態では、先端の樹脂厚み分だけ、ヨーク31、32と磁束誘導部材601、602との対向部の距離(ギャップ)が小さくなるため、感度を向上させることができる。この場合、キャップ805とケース501との界面からの浸水を防止するため、図26Bの(*)部に示す接触部分がレーザ溶着や接着剤にて封止されていることが必要である。
(a)図4~図8Bに示す形態のキャップ801は、先端部に袋状の封止部84が形成されているのに対し、図26に示す磁気検出モジュール905のように、先端が袋状になっていないキャップ805を用いてもよい。先端に封止部84が形成される形態に比べ、この形態では、先端の樹脂厚み分だけ、ヨーク31、32と磁束誘導部材601、602との対向部の距離(ギャップ)が小さくなるため、感度を向上させることができる。この場合、キャップ805とケース501との界面からの浸水を防止するため、図26Bの(*)部に示す接触部分がレーザ溶着や接着剤にて封止されていることが必要である。
(b)第1、第2実施形態では、シール材としてのOリング89がキャップ801の外周溝82に装着され、ハウジング402の取付穴42の内壁との間で軸シールに用いられる。その他のシール材として、面シールに用いられるOリングやパッキン又はガスケット等がキャップに設けられてもよい。またシール材は、防水用のものに限らず、オイルシール用や気体シール用のものであってもよい。また、キャップ本体811の外周においてOリング89が装着される部分の形状は、外周溝82に限らず、第3、第4実施形態と同様に径方向の段差部であってもよい。
(c)第1、第2実施形態では、ケース501へのキャップ801の装着の有無により、防水仕様及び非防水仕様の二種類のハウジング401、402への取付が選択可能となる。その他、例えば防水仕様の中でも軸シールのOリング仕様と面シールのパッキン仕様とがある場合や、Oリングのサイズ違いの仕様がある場合等に、各仕様に応じたキャップを選択してケースに装着可能としてもよい。或いは、取付部の形状やサイズが異なる複数の非防水仕様のハウジングに対するアダプタとして、キャップがケースに装着されてもよい。
(d)磁気検出モジュールが備える磁気センサの数は、上記実施形態で例示される二つに限らず、一つでもよく三つ以上でもよい。また、磁気検出モジュールは磁束誘導部材601、602を備えず、ハウジング40内で発生した磁束が一組のヨーク31、32から磁気センサ71、72に直接伝達されてもよい。磁束誘導部材601、602を備える構成では、磁束誘導部材の本体の形状は直線形状に限らず、ヨークに沿った円弧形状等であってもよく、延設部が設けられなくてもよい。また、磁束誘導部材は、一組のヨーク31、32と軸方向でなく径方向に対向してもよい。
(e)ケース501及びキャップ801は樹脂成形品に限らず、磁気検出に影響しない他の材料で製造されてもよい。また、ケース501へのキャップ801の装着方法は、ケース501の挿入部53をキャップ801の受容穴83に挿入し、接合部を溶着又は接着する方法に限らず、例えば圧入等によって装着してもよい。
(f)ハウジング401、402への誤組み付け防止部及び回転規制部の形状は、上記実施形態に示す突起部、溝等に限らない。また、誤組み付け防止部及び回転規制部の位置や数は適宜設定してよい。さらに、両方の機能を兼ね備える形態に限らず、誤組み付け防止機能のみ、又は、回転規制機能のみを備えてもよい。例えば非対称形状により誤組み付け防止部が構成されてもよい。加えて、他の構成により誤組み付け防止や回転規制の目的が達成される場合等には、誤組み付け防止部や回転規制部が設けられなくてもよい。
(g)第4実施形態の円筒部814は、円筒状に限らず、楕円筒状、長円筒状、多角形筒状等を含めた「筒部」として形成されてもよい。第3実施形態のキャップ本体813についても同様である。楕円筒部や長円筒部等であれば、Oリングによるシール機能も確保される。また、楕円筒部であれば「径」を用いて表現可能であるが、非円筒状の筒部において「径」の概念が適用しにくい場合、大径部及び小径部を「大軸部」及び「小軸部」として一般化すればよい。また、これらが対向する取付穴の大径穴及び小径穴を「大穴」及び「小穴」として一般化すればよい。また、筒部の軸方向と直交し中心から周縁に向かう方向を擬似的な「径方向」として、インロー構造における径方向の片側での軸部と穴との隙間を「片側嵌合隙間」と解釈すればよい。
(h)本開示の検出装置、又は本開示の磁気検出モジュールが適用される検出装置は、電動パワーステアリング装置のトルク検出装置に限らず、検出対象となる物理量の大きさに応じて発生する磁束を検出するものであればよい。発生した磁束は、ハウジング内部に設けられた一組のヨークにより伝達され、磁気検出モジュールの磁気センサによって検出される。例えば可動体の回転や直線移動に応じて発生する磁束を検出する回転検出装置、位置検出装置等として利用可能である。
以上、本開示はこのような実施形態に限定されるものではなく、その趣旨を逸脱しない範囲において、種々の形態で実施することができる。
本開示は実施形態に準拠して記述された。しかしながら、本開示は当該実施形態および構造に限定されるものではない。本開示は、様々な変形例および均等の範囲内の変形をも包含する。また、様々な組み合わせおよび形態、さらには、それらに一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせおよび形態も本開示の範疇および思想範囲に入るものである。
Claims (32)
- 取付部の形状又は大きさが異なる複数の仕様のハウジング(401、402)のいずれかに選択的に取付可能に設けられ、前記ハウジング内で発生した磁束を検出する磁気検出モジュールであって、
磁束を検出する一つ以上の磁気センサ(71、72)と、
前記磁気センサが収納されるケース(501)と、
前記ケースの端部に装着可能でありシール材(89)が設けられるキャップ(801、805)と、
を備え、
前記ケースに前記キャップが装着されない状態で、第1の仕様の前記ハウジング(401)に取付可能であり、且つ、前記ケースに前記キャップが装着された状態で、第2の仕様の前記ハウジング(402)に前記シール材を介して取付可能である磁気検出モジュール。 - 前記キャップは、外周溝(82)が形成された円板状のキャップ本体(811)を有し、
前記シール材は、前記外周溝に装着されるOリングである請求項1に記載の磁気検出モジュール。 - 前記Oリングは、前記ハウジングの取付穴の内壁との間で軸シールに用いられる請求項2に記載の磁気検出モジュール。
- 前記キャップは、
前記キャップ本体の一方の端面に開口し、前記ケースの端部に形成された挿入部(53)が挿入され、前記一方の端面からの深さが前記キャップ本体の厚さよりも深い受容穴(83)、及び、前記キャップ本体の他方の端面に接続し、前記受容穴の底部を覆って袋状とする封止部(84)が形成されている請求項1~3のいずれか一項に記載の磁気検出モジュール。 - 磁束を集める本体(600)を有し、検出される磁束を前記磁気センサに誘導する一つ以上の磁束誘導部材(601、602)を前記ケース内にさらに備える請求項1~4のいずれか一項に記載の磁気検出モジュール。
- 互いに対向する一組の前記磁束誘導部材を備え、前記磁気センサは、一組の前記磁束誘導部材の間に配置されている請求項5に記載の磁気検出モジュール。
- 前記磁束誘導部材は、前記ハウジング内に設けられる筒状のヨーク(31、32)に前記本体の少なくとも一部が対向し、前記ヨークに形成された磁気回路から磁束を誘導するものであり、
前記ヨークの軸方向の投影において、
前記磁気センサが一つの場合、前記磁気センサと前記ヨークの中心軸とを結び、前記磁気センサが複数の場合、複数の前記磁気センサの中間位置と前記ヨークの中心軸とを結ぶ仮想直線を基準線(X)とし、
前記基準線を挟み、前記磁束誘導部材の前記本体と前記ヨークとの対向範囲における前記ヨークの周方向両端に対応する部位を前記本体の周端部(63、64)と定義すると、
前記磁束誘導部材は、前記本体における前記周端部よりも前記基準線側の中間部(65)で、前記周端部に比べ、前記磁束誘導部材と前記ヨークとの間の単位面積当たりの磁気パーミアンスが大きくなるように構成されている請求項5または6に記載の磁気検出モジュール。 - 前記磁束誘導部材は、前記本体が長方形帯状に形成されている請求項5~7のいずれか一項に記載の磁気検出モジュール。
- 前記ケース又は前記キャップは、外部からの磁気ノイズを遮断する磁気シールド部材(37、38)が設けられている請求項1~8のいずれか一項に記載の磁気検出モジュール。
- 前記ケース又は前記キャップを前記ハウジングに組み付けるとき所定の相対角度に位置する姿勢のみで組み付け可能とし、前記所定の相対角度以外に位置する姿勢での誤組み付けを防止する誤組み付け防止部(54、55、871)が前記ケース又は前記キャップに設けられている請求項1~9のいずれか一項に記載の磁気検出モジュール。
- 前記ケース又は前記キャップを前記ハウジングに組み付けた後の前記ハウジングに対する回転を規制する回転規制部(54、55、871)が前記ケース又は前記キャップに設けられている請求項1~10のいずれか一項に記載の磁気検出モジュール。
- 前記誤組み付け防止部は、前記ケース又は前記キャップを前記ハウジングに組み付けた後の前記ハウジングに対する回転を規制する回転規制部の機能を兼ねる請求項10に記載の磁気検出モジュール。
- 検出対象となる物理量の大きさに応じて発生する磁束を伝達する一組のヨーク(31、32)が内部に設けられたハウジング(401、402)と、
前記ハウジングの取付穴に取り付けられ、ケース(501)に収納された一つ以上の磁気センサ(71、72)により前記ヨークから伝達される磁束を検出する請求項1~12のいずれか一項に記載の磁気検出モジュールと、
を備える検出装置。 - 前記ケース又は前記キャップを前記ハウジングに組み付けるとき所定の相対角度に位置する姿勢のみで組み付け可能とし、前記所定の相対角度以外に位置する姿勢での誤組み付けを防止する誤組み付け防止部、又は、前記ケース又は前記キャップを前記ハウジングに組み付けた後の前記ハウジングに対する回転を規制する回転規制部(44、45、471)が前記ハウジングに設けられている請求項13に記載の検出装置。
- トルクに応じて捩じれ変位するトーションバー(13)と、
前記トーションバーの一端側に固定された多極磁石(14)と、
を前記ハウジング内にさらに備え、
前記一組のヨークは、前記トーションバーの他端側に固定され、前記多極磁石の磁界内に磁気回路を形成し、
前記ヨークから伝達される磁束を前記磁気センサにより検出し、前記トーションバーに加わるトルクを検出するトルク検出装置として機能する請求項13または14に記載の検出装置。 - 取付部の形状又は大きさが異なる複数の仕様のハウジング(401、402)のいずれかに選択的に取付可能に設けられ、前記ハウジング内で発生した磁束を検出する磁気検出モジュールを構成するケースアセンブリであって、
磁束を検出する一つ以上の磁気センサ(71、72)と、
前記磁気センサが収納されるケース(501)と、
を備え、
単独で第1の仕様の前記ハウジング(401)に取付可能であり、且つ、シール材(89)が設けられるキャップ(801、805)が前記ケースの端部に装着された状態で、第2の仕様の前記ハウジング(402)に前記シール材を介して取付可能であるケースアセンブリ。 - 取付部の形状又は大きさが異なる複数の仕様のハウジング(401、402)のいずれかに選択的に取付可能に設けられ、前記ハウジング内で発生した磁束を検出する磁気検出モジュールの製造方法であって、
磁束を検出する一つ以上の磁気センサ(71、72)がケース(501)に収納されケースアセンブリが製造される収納工程と、
取付対象である前記ハウジングの仕様に応じて、前記ケースアセンブリを単独で用いるか、又は、前記ハウジングの仕様毎に設定されるキャップ(801、805)を前記ケースの端部に装着して用いるかが選択される選択工程と、
前記選択工程において前記キャップを前記ケースに装着することが選択された場合、前記キャップが前記ケースに装着され固定される装着工程と、
を含む磁気検出モジュールの製造方法。 - 前記キャップは、前記ハウジングに取り付けたとき前記ハウジングとの間をシールするシール部材(89)が設けられており、
前記選択工程において、
取付部にシール材が不要な前記ハウジングに対しては前記ケースアセンブリを単独で用いることが選択され、
取付部にシール材を要する前記ハウジングに対しては前記キャップを前記ケースに装着した状態で用いることが選択される請求項17に記載の磁気検出モジュールの製造方法。 - 前記ケース及び前記キャップは樹脂材料で形成され、
前記装着工程において、
前記ケースの端部に形成された挿入部(53)が前記キャップに形成された受容穴(83)に挿入された後、前記ケースの挿入部と前記キャップの前記受容穴との接合部が溶着される請求項17または18に記載の磁気検出モジュールの製造方法。 - 前記収納工程において前記磁気センサはポッティングにより固定され、
前記装着工程において前記キャップは接着剤で固定され、
前記ポッティングの硬化と前記接着剤の硬化とは同時に行われる請求項17~19のいずれか一項に記載の磁気検出モジュールの製造方法。 - 検出対象となる物理量の大きさに応じて発生する磁束を伝達する一組のヨーク(31、32)が内部に設けられた取付穴(42)を有するハウジング(402)と、
前記ハウジングの取付穴に取り付けられ、ケース(501、504)に収納された一つ以上の磁気センサ(71、72)により前記ヨークから伝達される磁束を検出する磁気検出モジュール(903、904)と、
を備える検出装置であって、
前記一組のヨークは、互いに対向し磁気回路を形成するリング部(35、36)を有し、
前記ハウジングの前記取付穴は、開口側に形成される大穴(426)、及び、前記大穴の奥に形成される小穴(425)を有し、
前記磁気検出モジュールは、前記取付穴の内壁に対向し、前記大穴に挿入される大軸部(866)、及び、前記小穴に挿入される小軸部(865)を有する筒部(813、814)、並びに、前記磁気センサが収納され、前記筒部の先端面から突出して一組の前記ヨークの前記リング部同士の間に挿入されるセンサ部(840)を有し、
前記取付穴及び前記筒部の軸方向と直交する方向において、
前記センサ部と前記リング部との最小間隔をセンサマージン(μ)と定義すると、前記大穴と前記大軸部との片側嵌合隙間(ε1)、又は、前記小穴と前記小軸部との片側嵌合隙間(ε2)のうち少なくとも一方は、前記センサマージンよりも小さく設定されている検出装置。 - 前記大穴と前記大軸部との片側嵌合隙間(ε1)が前記センサマージンよりも小さく設定されており、
前記取付穴及び前記筒部の軸方向において、前記大穴の挿入端から前記ヨークの前記リング部の外縁までの距離(Lh1)は、前記大軸部と前記小軸部との境界から前記センサ部の先端までの距離(Ls1)よりも長く設定されている請求項21に記載の検出装置。 - 前記小穴と前記小軸部との片側嵌合隙間(ε2)が前記センサマージンよりも小さく設定されており、
前記取付穴及び前記筒部の軸方向において、前記ハウジングの前記小穴の挿入端から前記ヨークの前記周縁部の外縁までの距離(Lh2)は、前記筒部の先端面から前記センサ部の先端までの距離(Ls2)よりも長く設定されている請求項21に記載の検出装置。 - 前記筒部の前記小軸部の外周に、前記ハウジングの取付穴の内壁との間で軸シールに用いられるシール材としてのOリング(89)が装着される請求項21~23のいずれか一項に記載の検出装置。
- 前記磁気検出モジュールを前記ハウジングに組み付けるとき所定の相対角度に位置する姿勢のみで組み付け可能とし、前記所定の相対角度以外に位置する姿勢での誤組み付けを防止する誤組み付け防止部(875-877、475-477)が前記筒部又は前記ハウジングに設けられている請求項21~24のいずれか一項に記載の検出装置。
- 前記磁気検出モジュールを前記ハウジングに組み付けた後の前記ハウジングに対する回転を規制する回転規制部(875-877、475-477)が前記筒部又は前記ハウジングに設けられている請求項21~25のいずれか一項に記載の検出装置。
- 前記誤組み付け防止部は、前記磁気検出モジュールを前記ハウジングに組み付けた後の前記ハウジングに対する回転を規制する回転規制部の機能を兼ねる請求項25に記載の検出装置。
- トルクに応じて捩じれ変位するトーションバー(13)と、
前記トーションバーの一端側に固定された多極磁石(14)と、
を前記ハウジング内にさらに備え、
前記一組のヨークは、前記トーションバーの他端側に固定され、前記多極磁石の磁界内に磁気回路を形成し、前記多極磁石の径外側で前記リング部を有し、
前記ヨークから伝達される磁束を前記磁気センサにより検出し、前記トーションバーに加わるトルクを検出するトルク検出装置として機能する請求項21~27のいずれか一項に記載の検出装置。 - 前記筒部(814)は、前記ケース(504)に一体に形成される請求項21~28のいずれか一項に記載の検出装置。
- 前記筒部は、前記ケース(501)の端部に装着されたキャップ(803)の板状のキャップ本体(813)により構成される請求項21~28のいずれか一項に記載の検出装置。
- 請求項21~30のいずれか一項に記載の検出装置において前記ハウジングに取り付けられる磁気検出モジュール。
- 請求項30に記載の検出装置において前記ハウジングに取り付けられる磁気検出モジュールであって、
前記検出装置を構成する前記ハウジングとは取付部の形状又は大きさが異なる仕様のハウジングを第1の仕様のハウジング(401)とし、前記検出装置を構成する前記ハウジングを第2の仕様のハウジング(402)とすると、
前記ケースに前記キャップが装着されない状態で、前記第1の仕様のハウジングに取付可能であり、且つ、前記ケースに前記キャップが装着された状態で、前記第2の仕様のハウジングに取付可能である磁気検出モジュール。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22183102.7A EP4109064A1 (en) | 2018-06-28 | 2019-06-19 | Magnetic detection module, detection device, case assembly, and production method for magnetic detection module |
| EP19826069.7A EP3816599A4 (en) | 2018-06-28 | 2019-06-19 | Magnetic detection module, detection device, case assembly, and production method for magnetic detection module |
| US17/129,094 US11353521B2 (en) | 2018-06-28 | 2020-12-21 | Magnetic detection module, detection device, case assembly, and production method for magnetic detection module |
| US17/829,295 US11579211B2 (en) | 2018-06-28 | 2022-05-31 | Detection device |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-123160 | 2018-06-28 | ||
| JP2018123160 | 2018-06-28 | ||
| JP2018-195711 | 2018-10-17 | ||
| JP2018195711A JP6908014B2 (ja) | 2018-06-28 | 2018-10-17 | 磁気検出モジュール、検出装置、ケースアセンブリ、及び、磁気検出モジュールの製造方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/129,094 Continuation US11353521B2 (en) | 2018-06-28 | 2020-12-21 | Magnetic detection module, detection device, case assembly, and production method for magnetic detection module |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020004161A1 true WO2020004161A1 (ja) | 2020-01-02 |
Family
ID=68985661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/024190 WO2020004161A1 (ja) | 2018-06-28 | 2019-06-19 | 磁気検出モジュール、検出装置、ケースアセンブリ、及び、磁気検出モジュールの製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11579211B2 (ja) |
| EP (1) | EP4109064A1 (ja) |
| WO (1) | WO2020004161A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11372125B2 (en) * | 2019-04-19 | 2022-06-28 | Tsinghua University | Amphibious portable magnetism detector |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997004318A1 (fr) * | 1995-07-21 | 1997-02-06 | Matsushita Electric Industrial Co., Ltd. | Capteur de vitesse de rotation magnetique |
| JP2008249598A (ja) * | 2007-03-30 | 2008-10-16 | Jtekt Corp | トルク検出装置 |
| US20110167920A1 (en) * | 2008-07-14 | 2011-07-14 | Continental Teves Ag & Co. Ohg | Torque sensor arrangement with rotational angle index detection |
| JP4753545B2 (ja) | 2004-04-08 | 2011-08-24 | 株式会社ジェイテクト | トルク検出装置及びこれの製造方法 |
| JP2012237728A (ja) * | 2011-05-13 | 2012-12-06 | Denso Corp | トルクセンサ |
| JP5153490B2 (ja) | 2008-07-11 | 2013-02-27 | カヤバ工業株式会社 | トルクセンサ |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5121289A (en) | 1990-01-31 | 1992-06-09 | Honeywell Inc. | Encapsulatable sensor assembly |
| US5414355A (en) | 1994-03-03 | 1995-05-09 | Honeywell Inc. | Magnet carrier disposed within an outer housing |
| US5563510A (en) | 1995-04-11 | 1996-10-08 | Component Sales & Consultants, Inc. | Variable reluctance sensor having hermetically sealed housing and damping element |
| US5631557A (en) | 1996-02-16 | 1997-05-20 | Honeywell Inc. | Magnetic sensor with encapsulated magnetically sensitive component and magnet |
| US6504366B2 (en) | 2001-03-29 | 2003-01-07 | Honeywell International Inc. | Magnetometer package |
| JP2005128870A (ja) | 2003-10-24 | 2005-05-19 | Jatco Ltd | 車両の制御装置 |
| US7509883B2 (en) | 2004-04-08 | 2009-03-31 | Jtekt Corporation | Torque detecting apparatus and manufacturing method thereof |
| JP4085078B2 (ja) | 2004-07-20 | 2008-04-30 | 住電エレクトロニクス株式会社 | 回転検出センサ |
| JP4645477B2 (ja) * | 2006-02-27 | 2011-03-09 | 株式会社デンソー | 回転検出装置 |
| US8015885B2 (en) | 2007-03-29 | 2011-09-13 | Jtekt Corporation | Torque detector |
| JP4997474B2 (ja) | 2007-03-29 | 2012-08-08 | 株式会社ジェイテクト | トルク検出装置 |
| JP2009042003A (ja) * | 2007-08-07 | 2009-02-26 | Denso Corp | 電流センサ |
| FR2929005B1 (fr) | 2008-03-18 | 2010-04-02 | Jtekt Europe Sas | Dispositif de detection de couple pour direction assistee de vehicule automobile |
| JP5843100B2 (ja) | 2011-11-08 | 2016-01-13 | 株式会社ジェイテクト | トルク検出装置および電動パワーステアリング装置 |
| US8776619B2 (en) | 2011-11-18 | 2014-07-15 | Bourns, Inc. | Small angle sensor for measuring steering shaft torque |
| JP5955611B2 (ja) | 2012-03-30 | 2016-07-20 | 株式会社ショーワ | パワーステアリング装置、およびパワーステアリング装置の製造方法 |
| US9244090B2 (en) | 2012-12-18 | 2016-01-26 | Trail Tech, Inc. | Speed sensor assembly |
| FR3047560B1 (fr) | 2016-02-10 | 2018-03-16 | Jtekt Europe | Procede de fabrication d’un capteur de couple comprenant une etape d’encapsulation du circuit electronique du capteur. |
| JP6726593B2 (ja) | 2016-10-05 | 2020-07-22 | Kyb株式会社 | トルクセンサ |
| JP6791065B2 (ja) | 2017-04-28 | 2020-11-25 | 株式会社Soken | トルク検出装置及びセンサモジュール |
-
2019
- 2019-06-19 WO PCT/JP2019/024190 patent/WO2020004161A1/ja active Application Filing
- 2019-06-19 EP EP22183102.7A patent/EP4109064A1/en active Pending
-
2022
- 2022-05-31 US US17/829,295 patent/US11579211B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997004318A1 (fr) * | 1995-07-21 | 1997-02-06 | Matsushita Electric Industrial Co., Ltd. | Capteur de vitesse de rotation magnetique |
| JP4753545B2 (ja) | 2004-04-08 | 2011-08-24 | 株式会社ジェイテクト | トルク検出装置及びこれの製造方法 |
| JP2008249598A (ja) * | 2007-03-30 | 2008-10-16 | Jtekt Corp | トルク検出装置 |
| JP5153490B2 (ja) | 2008-07-11 | 2013-02-27 | カヤバ工業株式会社 | トルクセンサ |
| US20110167920A1 (en) * | 2008-07-14 | 2011-07-14 | Continental Teves Ag & Co. Ohg | Torque sensor arrangement with rotational angle index detection |
| JP2012237728A (ja) * | 2011-05-13 | 2012-12-06 | Denso Corp | トルクセンサ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11372125B2 (en) * | 2019-04-19 | 2022-06-28 | Tsinghua University | Amphibious portable magnetism detector |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4109064A1 (en) | 2022-12-28 |
| US20220291297A1 (en) | 2022-09-15 |
| US11579211B2 (en) | 2023-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7103498B2 (ja) | 検出装置 | |
| US9255857B2 (en) | Torque detecting device and electric power steering system | |
| US8887580B2 (en) | Torque detection device, method of manufacturing torque detection device, and electric power steering system including torque detection device | |
| US7758363B2 (en) | Rotary connector device equipped with built-in steering angle sensor | |
| JP6791065B2 (ja) | トルク検出装置及びセンサモジュール | |
| US20190226925A1 (en) | Torque sensor | |
| JP2020008547A5 (ja) | ||
| KR20160081135A (ko) | 토크센서모듈 및 이를 포함하는 조향각 센싱장치 | |
| EP3736539B1 (en) | Sensing device | |
| WO2014112361A1 (ja) | センサ組込回転コネクタ | |
| US11579211B2 (en) | Detection device | |
| WO2012128060A1 (ja) | トルクセンサ | |
| KR20160121896A (ko) | 토크센서모듈 및 이를 포함하는 조향각 센싱장치 | |
| WO2018198576A1 (ja) | トルク検出装置及びセンサモジュール | |
| JP6617612B2 (ja) | トルク角度検出装置 | |
| US9945742B2 (en) | Torque sensor and electric power steering apparatus | |
| JP2012194144A (ja) | トルクセンサ | |
| JP2019028030A (ja) | 磁気検出装置、トルクセンサ及び電動パワーステアリング装置 | |
| JP2012194143A (ja) | トルクセンサ | |
| KR102105643B1 (ko) | 토크 센서 장치 | |
| JP6431466B2 (ja) | 回転検出装置 | |
| JP3206066U (ja) | センサ内蔵密封装置 | |
| KR20160081137A (ko) | 토크센서모듈 및 이를 포함하는 조향각 센싱장치 | |
| JP2014224789A (ja) | センサ内蔵密封装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19826069 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2019826069 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2019826069 Country of ref document: EP Effective date: 20210128 |