WO2020003874A1 - Probe for estimating urine amount, and device for estimating urine amount using same - Google Patents
Probe for estimating urine amount, and device for estimating urine amount using same Download PDFInfo
- Publication number
- WO2020003874A1 WO2020003874A1 PCT/JP2019/021455 JP2019021455W WO2020003874A1 WO 2020003874 A1 WO2020003874 A1 WO 2020003874A1 JP 2019021455 W JP2019021455 W JP 2019021455W WO 2020003874 A1 WO2020003874 A1 WO 2020003874A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- probe
- urine volume
- sensor
- bladder
- unit
- Prior art date
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
Definitions
- the present technology relates to a urine volume estimation probe that detects the shape of the bladder using ultrasonic waves, and a urine volume estimation device that estimates the urine volume using the probe.
- Patent Literature 1 discloses an ultrasonic urine volume sensor in which a plurality of ultrasonic oscillation elements that oscillate ultrasonic waves toward a bladder wall surface are arranged along a bladder extending direction (substantially up and down direction). . Further, in Patent Document 2, an arrangement is set such that a plurality of sensors using ultrasonic transducers can detect the shape of the bladder and an ultrasonic emission angle. For example, the number of sensors emitted to the bottom of the bladder is maximized, A non-invasive urine volume estimation sensor unit is disclosed that is arranged to have a plurality of sensor rows from the top to the top.
- the probe should not be applied to the body every time urine volume is measured. It is preferable that it is always worn and that the amount of urine can be automatically estimated at regular intervals.
- the urine volume estimation probe in order to accurately estimate the urine volume in the bladder, it is important to attach the urine volume estimation probe to an appropriate position on the body.
- a method of confirming the position of the pubic bone by the subject himself, predicting the position of the bladder based on the position, and mounting the bladder is adopted. In some cases, the accuracy of urine volume estimation was reduced.
- An object of the present invention is to provide an estimation probe and a urine volume estimation device using the same.
- the present inventor arranges a plurality of sensors of the probe not in the height direction but in the width direction (substantially the left-right direction), and provides a sensor below the sensor for determining the mounting position of the probe. They found that the problem could be solved, and completed this technology.
- the present technology is a probe having a plurality of sensors that transmit ultrasonic waves into a body and detect reflected waves of the ultrasonic waves, wherein the probe has a first sensor unit and the first sensor unit.
- a second sensor unit disposed below the sensor unit, wherein the first sensor unit has at least two of the plurality of sensors arranged in the width direction of the probe.
- the second sensor section has a configuration in which at least one sensor of the plurality of sensors is disposed below the first sensor section, and wherein the second sensor section has A probe for estimating urine volume is provided, which includes a positioning sensor for determining a mounting position of the probe on a body.
- the present invention also provides a urine volume estimation device including the urine volume estimation probe and a main unit connected to the probe via a cable.
- the senor by disposing the sensor in the width direction of the probe, it is more compact in the height direction than the conventional probe, so that discomfort during mounting is less, and the patient is in a supine position, a sitting position, etc.
- the urine volume can be estimated efficiently regardless of the posture.
- a positioning sensor for determining the mounting position of the probe positioning before mounting can be easily performed.
- FIG. 1 is a schematic side view of a probe for estimating urine volume according to an example of an embodiment of the present technology. It is a schematic diagram of a urine volume estimation device according to an example of an embodiment of the present technology. 1 is a block diagram of a urine volume estimation device according to an example of an embodiment of the present technology. 1 is a schematic diagram of a urine volume estimation system according to an example of an embodiment of the present technology. It is a flowchart regarding the positioning of the probe for urine volume estimation according to an example of an embodiment of the present technology.
- FIG. 2 is a first schematic diagram relating to positioning of a urine volume estimation probe according to an example of an embodiment of the present technology.
- FIG. 6 is a second schematic diagram relating to positioning of a urine volume estimation probe according to an example of an embodiment of the present technology.
- FIG. 13 is a third schematic diagram related to positioning of a urine volume estimation probe according to an example of an embodiment of the present technology. It is an example of the reflected wave detected by the urine volume estimation probe according to an example of an embodiment of the present technology. It is an example of the reflected wave detected by the urine volume estimation probe according to an example of an embodiment of the present technology. It is an example of the reflected wave detected by the urine volume estimation probe according to an example of an embodiment of the present technology. It is an example of a screen of a user terminal regarding positioning of a urine volume estimation probe concerning an example of an embodiment of the present technology.
- FIG. 1 is a first schematic diagram relating to a urine volume estimation method according to an example of an embodiment of the present technology.
- FIG. 11 is a second schematic diagram related to a urine volume estimation method according to an example of an embodiment of the present technology.
- FIG. 13 is a third schematic diagram illustrating a urine volume estimation method according to an example of an embodiment of the present technology.
- the probe for estimating urine volume according to the present technology has a plurality of sensors that transmit ultrasonic waves into the body and detect reflected waves of the ultrasonic waves, and based on information of the reflected waves detected by each sensor. Is used to estimate the amount of urine in the bladder.
- the target for estimating the amount of urine is not particularly limited, and is, for example, a patient suffering from urination disorder or urinary incontinence, or an elderly person having difficulty in going to the toilet by himself.
- the probe for estimating urine volume according to the present technology is arranged on the skin of the abdomen of such a subject and at a position corresponding to the bladder (for example, the lower abdomen), and is fixed to the body with a tape or a belt. You. A gel or the like is applied between the probe for estimating urine volume and the abdomen to improve the permeability of the ultrasound to the abdomen.
- FIG. 1 is a schematic diagram of a urine volume estimation probe according to an example of an embodiment of the present technology.
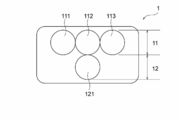
- the probe for estimating urine amount 1 according to the present embodiment has a substantially rectangular shape with a rounded corner and a plurality of sensors 111, 112, 113, 121.
- the urine volume estimation probe 1 includes at least a first sensor unit 11 and a second sensor unit 12 disposed below the first sensor unit 11.
- the first sensor unit 11 has a configuration in which at least two sensors are arranged in the width direction of the probe 1.
- the first sensor unit 11 may have a configuration in which, for example, a first sensor 111, a second sensor 112, and a third sensor 113 are arranged in the width direction of the probe 1 in a front view.
- the second sensor unit 12 has a configuration in which at least one sensor is disposed below the first sensor unit 11.
- the second sensor unit 12 may have a configuration in which, for example, the fourth sensor 121 is disposed below the first sensor unit 11.
- the vertical direction of the probe 1 is the vertical direction when the subject wears the probe 1. That is, the second sensor unit 12 is located below the first sensor unit 11 when the subject wears the probe 1.
- the second sensor section 12 includes a positioning sensor for determining the mounting position of the probe 1 on the body.
- one sensor for example, the fourth sensor 121
- the second sensor unit 12 has two or more sensors, all the sensors constituting the second sensor unit 12 may be used for both the urine volume estimation and the positioning of the probe 1.
- the second sensor unit 12 may have a configuration in which a urine volume estimation sensor and a positioning sensor are separately provided.
- the sensors 111, 112, 113, and 121 each have a piezoelectric element and transmit and receive ultrasonic waves. Specifically, when electrodes are formed on both sides of the piezoelectric element and a voltage is applied between the two electrodes, the piezoelectric element vibrates according to the drive voltage to transmit ultrasonic waves, while receiving ultrasonic waves, It is configured to generate an electric signal according to the vibration.
- the shape of each sensor is not particularly limited, but may be, for example, a circular thin plate, a square, or a rectangle.
- FIG. 2 is a schematic side view of the urine volume estimation probe according to the present embodiment.
- sensor 111,112,113,121 according to the present embodiment is arranged at a predetermined angle ⁇ relative to the axis l 11 or l 12 perpendicular to the array surface l 10 of each sensor, respectively, Ultrasound is transmitted into the body at each angle ⁇ .
- the first sensor 111, the second sensor 112, and the third sensor 113 are arranged so as to transmit ultrasonic waves 1111, 1121, and 1311 in a radial direction in a direction (height direction) in which the bladder expands.
- the ultrasonic transmission angles ⁇ 111 , ⁇ 112 (omitted in FIG. 2 because they are 0 degrees) and ⁇ 113 are different from each other.
- the ultrasonic transmission angles ⁇ 111 , ⁇ 112 , and ⁇ 113 are preferably in the range of ⁇ 40 to +40 degrees when the direction above the axis l 11 is a positive direction.
- the fourth sensor 121 is preferably disposed so as to transmit ultrasonic waves 1211 downward with respect to the axis l 12 perpendicular to the array surface l 10 of the sensor. By configuring so that the ultrasonic wave 1211 is transmitted downward, the probe 1 can transmit the ultrasonic wave from the lower end of the bladder to a position closer to the upper end, and the urine volume can be measured more accurately. .
- the ultrasonic transmission angle ⁇ 121 of the fourth sensor 121 is preferably arranged in a range of ⁇ 40 to 0 degrees when the upper side of the axis l 12 is set to a positive direction.
- the ultrasonic transmission angle ⁇ 121 of the fourth sensor 121 constituting the second sensor unit 12 is determined by the ultrasonic wave of the first sensor 111, the second sensor 112, and the third sensor 113 constituting the first sensor unit 11. It is preferable that the transmission angles ⁇ 111 , ⁇ 112 , and ⁇ 113 be negatively larger than the transmission angles ⁇ 111 , ⁇ 112 , and ⁇ 113 .
- the fourth sensor 121 reliably detects the lower end of the bladder or the upper edge of the pubic bone, and the first sensor 111, the second sensor 112, and the third sensor 113 reach the upper end of the bladder. Information can be obtained efficiently.
- the sensors constituting the first sensor unit 11 may be arranged in a line in the width direction, but are arranged with their positions shifted in the height direction. It may be.
- the urine volume estimating apparatus is based on the information obtained from the urine volume estimating probe, and informs information related to the position of the probe and information related to urine volume in the bladder. Used for Hereinafter, this will be described in more detail with reference to FIGS.
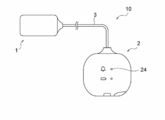
- FIG. 3 shows a schematic diagram of a urine volume estimation device according to an example of an embodiment of the present technology.
- the urine volume estimation device 10 includes a urine volume estimation probe 1 and a main unit 2 connected to the probe 1 by a cable 3.
- the cable 3 according to the present embodiment is preferably extended from the side surface in the width direction of the probe 1 in a front view. By extending the cable 3 not in the height direction but in the width direction of the probe 1, the cable 3 is less likely to hinder the movement of the subject's body, and discomfort during wearing can be further reduced.
- the main unit 2 according to the present embodiment is mounted on, for example, the clothes of the subject.
- the main body unit 2 includes a transmitting unit 21 that outputs a driving voltage to the first sensor unit 11 and the second sensor unit 12, a receiving unit 22 that receives an electric signal from the sensor, and a transmitting unit.
- a switch 23 for switching sensors connected to the reception unit 21 and the reception unit 22, a notification unit 24 for notifying various information to the outside, a communication unit 25 for communicating with the outside, and a storage unit 26 for storing various data
- a control unit 27 that performs overall control of the main body unit 2 and a memory 28 that stores various parameters.
- the transmission unit 21 supplies a drive voltage to the first sensor unit 11 and the second sensor unit 12.
- the transmission section 21 has a pulse generator 21a and an amplification section 21b.
- the pulse generator 21a generates a pulse signal having a predetermined pulse width and a predetermined voltage value.
- the pulse generator 21a may be configured so that the pulse width, the number of pulses, and the frequency can be changed.
- the amplifying unit 21b amplifies the pulse signal from the pulse generator 21a and outputs it as a drive voltage to the first sensor unit 11 and the second sensor unit 12.
- the receiving unit 22 receives electric signals from the first sensor unit 11 and the second sensor unit 12.
- the receiving unit 22 has an amplifying unit 22a, a detecting unit 22b, and an A / D converting unit 22c.
- the amplification unit 22a amplifies signals received from the first sensor unit 11 and the second sensor unit 12, and outputs the signals to the detection unit 22b.
- the detector 22b demodulates the received signal (for example, an amplitude modulated wave) received from the amplifier 22a by a method such as envelope detection and outputs the processed signal to the A / D converter 22c.
- the A / D converter 22c performs A / D conversion on the received signal from the detector 22b and outputs the signal to the controller 27.
- the switch 23 selects a sensor connected to the transmitting unit 21 and the receiving unit 22 from among the sensors constituting the first sensor unit 11 and the second sensor unit 12. For example, in the case of the mode for positioning the urine volume estimation probe, only the positioning sensor of the second sensor unit 12 is selected. In the case of the mode for estimating the urine volume and notifying the urination timing, the mode is selectively switched from the first sensor unit 11 and the second sensor unit 12.
- the notification unit 24 is, for example, a vibrator, an LED lamp, an alarm, or the like.
- the notification unit 24 is an LED lamp
- the notification unit 24 may be provided in the main body unit 2 as shown in FIG.
- the subject is notified of various information (for example, the position of the probe 1 with respect to the bladder, the arrival of urination timing, and the like) by the vibration of the vibrator, the lighting mode of the LED lamp, the sound, and the like.
- the communication unit 25 communicates with an external communication device.
- the communication unit 25 performs communication according to the Bluetooth (registered trademark) standard.
- the communication unit 25 communicates with the user terminal 4 in the urine volume estimation system 100 described later.
- the storage unit 26 temporarily stores the reception signal received from the reception unit 22.
- the storage unit 26 also stores information acquired from the user terminal 4 via the communication unit 25 in the urine volume estimation system 100 described below.
- the control unit 27 has one or a plurality of processors, and controls the transmission unit 21, the reception unit 22, the switch 23, the notification unit 24, and the communication unit 25.
- control unit 27 controls the switch 23 to switch the sensors connected to the transmission unit 21 and the reception unit 22.
- the control unit 27 controls the transmission unit 21 to output a drive voltage to the first sensor unit 11 and the second sensor unit 12.
- control unit 27 controls the receiving unit 22 to convert the received signals of the first sensor unit 11 and the second sensor unit 12 into digital signals, and performs averaging processing on the received signals from the receiving unit 22. Is performed.
- the control unit 27 determines the position of the probe 1 with respect to the bladder, the amount of urine in the bladder, the arrival of urination timing, and the like based on the reception signal from the reception unit 22, and performs processing according to the analysis result. (For example, the notification unit 24 is operated).
- control unit 27 controls the communication unit 25 to transmit information on a signal received from the reception unit 22 to the outside. Further, the control unit 27 receives a signal from the outside via the communication unit 25 and performs a process according to the signal (for example, activates the notification unit 24).
- the memory 28 stores parameters such as the frequency, output, number of pulses, gain (amplification factor), and standby time of the ultrasonic wave.
- the probe 1 for estimating urine volume and the main unit 2 may be wirelessly connected without being connected by wire.
- FIG. 5 is a schematic diagram of a urine volume estimation system according to an example of an embodiment of the present technology.
- the urine volume estimation system 100 includes the above-described urine volume estimation device 10, a user terminal 4 that receives a signal transmitted from the urine volume estimation device 10 and provides an application or the like, and mainly as a database. And a functioning server 5.
- the urine volume estimation device 10 performs wireless communication with the user terminal 4, and the user terminal 4 performs wireless communication with the server 5.
- the user terminal 4 can be, for example, a smartphone or a tablet terminal. By registering the urine volume estimation device 10 in the user terminal 4 in advance, communication between the urine volume estimation device 10 and the user terminal 4 becomes possible.
- the number of the user terminals 4 is not limited to one, but may be a plurality (for example, a caregiver user terminal 4 and a target person user terminal 4).
- the user terminal 4 estimates the amount of urine in the bladder and determines the timing of urination based on the reception signal transmitted from the urine amount estimation device 10.
- the user terminal 4 includes information on the target person such as a user ID for specifying the target person and a device ID for specifying the urine volume estimation device 10; information on a reception signal transmitted from the urine volume estimation device 10; urine volume in the bladder And data and the like for estimating the urine and determining the urination timing; analysis results relating to urine volume in the bladder, urination timing, and the like;
- the user terminal 4 downloads an application dedicated to the urine volume estimation system 100, thereby notifying the user of information such as the urine volume in the subject's bladder and urination timing, and transmitting / receiving information to / from the server 5. Or you can go.
- the server 5 performs so-called cloud computing.
- the server 5 can communicate with the user terminal 4 by registering the user terminal 4 in advance, and information of the user terminal 4 is stored in association with the urine volume estimation device 10.
- a dedicated application is downloaded to the user terminal 4, information is transmitted and received between the user terminal 4 and the server 5, for example, once a day.
- the server 5 includes information on the target such as a user ID for specifying the target, a device ID for specifying the urine volume estimation device 10, and a terminal ID for specifying the user terminal 4; urine in the bladder transmitted from the user terminal 4. Analysis result data relating to the amount, urination timing, and the like are stored. Further, it is possible to machine-learn a threshold value for judging the urination timing of the target person and information on the timing of notifying the urination timing.
- the urine volume estimation device is configured to position the urine volume estimation probe with respect to the bladder based on information of the reflected wave detected by the above-described positioning sensor. And the positioning can be performed so that the probe is mounted at an appropriate position.
- an operation example of the urine volume estimation system when positioning the urine volume estimation probe will be described with reference to FIG.
- the fourth sensor 121 of the second sensor unit 12 is used for both of the urine volume estimation and the positioning of the probe 1 is shown, but a positioning sensor separate from the fourth sensor 121 is used. Is provided, the fourth sensor 121 may be replaced with the positioning sensor in the following description.
- the control unit 27 outputs an ultrasonic wave transmission command (step S11). Specifically, the control unit 27 controls the switch 23 so that the fourth sensor 121 is connected to the transmission unit 21 and the reception unit 22, and outputs a pulse signal generation command to the transmission unit 21.
- the generation command serves as a trigger for positioning the urine volume estimation probe 1, and the transmission unit 21 supplies a driving voltage based on the generation command to the fourth sensor 121.
- the fourth sensor 121 transmits an ultrasonic wave based on the drive voltage.
- the control unit 27 outputs the generation command at a predetermined cycle.
- Step S12 when the fourth sensor 121 receives the ultrasonic wave (Step S12), the receiving unit 22 processes the received signal.
- the control unit 27 determines whether the received signal includes a reflected wave from the bladder (Step S13).
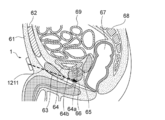
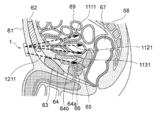
- FIGS. 7 to 9 are schematic sectional views of the lower abdomen of the human body.
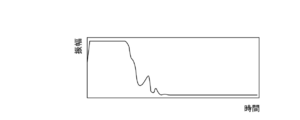
- FIGS. 10 to 12 show examples of the detected reflected wave.
- the small intestine 69 is located above the bladder 64, and the pubic bone 63 is located diagonally below and in front of the bladder 64.
- the probe 1 When determining the mounting position of the urine volume estimation probe 1, the probe 1 is gradually applied from above the abdomen. As shown in FIG. 7, when the ultrasonic wave 1211 transmitted from the fourth sensor 121 of the probe 1 reaches the small intestine 69 and does not reach the bladder 64, a reflected wave as shown in FIG. Is detected.
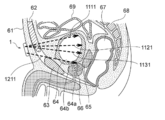
- the probe 1 is slightly moved downward. Then, the ultrasonic wave 1211 reaches the bladder 64, and as shown in FIG. 11, a reflected wave W from the back wall 64a of the bladder 64 (hereinafter, also referred to as a "reflected wave W from the bladder 64") is detected. Will be done.
- the ultrasonic wave 1211 is transmitted below the bladder 64, and the reflected wave W from the bladder 64 can be detected as shown in FIG. Disappears.
- the urine volume estimation probe 1 can be positioned based on the presence or absence of the reflected wave W from the bladder 64.
- the control unit 27 determines that the bladder 64 has been detected when the reflected wave W from the bladder 64 is included in the reception signal of the fourth sensor 121. For example, the LED lamp of the notification unit 24 lights up in green. Then, a command is output to the notifying unit 24 (step S141). On the other hand, when the reflected wave W from the bladder 64 is not included in the received signal, it is determined that the bladder 64 has not been detected, and, for example, the notification unit 24 is turned on so that the LED lamp of the notification unit 24 lights red. A command is output (step S142). At this time, not only the notification unit 24 but also the display of the user terminal 4 may be displayed in green or red. Alternatively, the user terminal 4 may present an instruction screen 41 as shown in FIG. 13 to indicate an optimal mounting position of the urine volume estimation probe 1.
- the control unit 27 sets a standby time (steps S151 and S152), and determines whether the standby time has elapsed since the previous transmission of the ultrasonic wave 1211 (steps S161 and S162). If the standby time has elapsed, the control unit 27 outputs an ultrasonic transmission command again (step S11). On the other hand, if the standby time has not elapsed, the control unit 27 waits for the standby time to elapse, and outputs an ultrasonic transmission command again after the standby time has elapsed (step S11). In this way, the control unit 27 issues an ultrasonic transmission command at intervals of the standby time, and periodically determines the position of the urine volume estimation probe 1 with respect to the bladder 64.
- the urine volume estimation device 10 includes the urine volume estimation probe 1 and the main device unit 2, and the fourth sensor of the second sensor unit 12 included in the probe 1. Based on the reflected wave W from the bladder 64 detected by 121, the control unit 27 of the main device 2 determines the position of the probe 1 with respect to the bladder 64. That is, the method for determining the mounting position of the urine volume estimation probe according to the present technology includes the steps of transmitting ultrasonic waves into the body, detecting reflected waves of the ultrasonic waves from the body, and detecting from the reflected waves. Determining the position of the probe with respect to the bladder based on the reflected waves from the bladder.
- control unit 27 may determine the optimal mounting position of the urine volume estimation probe 1 based on the lower end 64b of the bladder 64, The optimal mounting position may be determined based on the upper edge. Further, the optimal mounting position may be determined based on both the lower end of the bladder 64 and the upper edge of the pubic bone 63.
- the urine volume estimation device uses the urine volume in the bladder based on information on reflected waves detected by the first sensor unit and the second sensor unit. Can be estimated and urination timing can be notified.
- an operation example of the urine volume estimation system when estimating the urine volume and notifying the urination timing will be described with reference to FIG.
- the control unit 27 outputs an ultrasonic wave transmission command (step S21). Specifically, the control unit 27 causes the first sensor 111, the second sensor 112, the third sensor 113, and the fourth sensor 121 to transmit and receive ultrasonic waves in order while switching the switch 23.
- the control unit 27 controls the switch 23 so that the first sensor 111 is connected to the transmission unit 21 and the reception unit 22, and outputs a pulse signal generation command to the transmission unit 21.
- the transmitting unit 21 supplies a driving voltage based on the generation command to the first sensor 111, and the first sensor 111 transmits an ultrasonic wave based on the driving voltage.
- the same control is performed for the second sensor 112, the third sensor 113, and the fourth sensor 121.
- the control unit 27 outputs this generation command at a predetermined cycle.
- the receiving unit 22 processes a signal received from each sensor.
- the control unit 27 determines a urine volume level from the received signal and determines whether the urine volume level is equal to or higher than a threshold (step S23).
- the user terminal 4 that has received the information of the received signal via the communication unit 25 may determine the urine volume level.
- the “urine volume level” is a value representing the urine volume in the bladder, and may be, for example, the number of sensors in which the received signal includes the reflected wave W from the bladder 64.
- FIGS. 15 to 17 are schematic sectional views of the lower abdomen of the human body. Note that the structure is common to FIGS. 7 to 9 and will not be described.
- the ultrasonic wave 1211 transmitted from the fourth sensor 121 reaches the bladder 64, and the reflected wave W from the bladder 64 in the fourth sensor 121 is Is detected.
- the ultrasonic waves 1111, 1121, and 1311 transmitted from the first sensor 111, the second sensor 112, and the third sensor 113 do not reach the bladder 64, and are transmitted to the first sensor 111, the second sensor 112, and the third sensor 113.
- the reflected wave W from the bladder 64 is not detected. That is, in FIG. 15, the urine volume level is “1”.
- the bladder 64 expands in the height direction and pushes up the small intestine 69. Then, in addition to the ultrasonic wave 1211 transmitted from the fourth sensor 121, the ultrasonic wave 1131 transmitted from the third sensor 113 also reaches the bladder 64, and is reflected by the third sensor 113 and the fourth sensor 121 from the bladder 64. Wave W is detected. On the other hand, the ultrasonic waves 1111, 1121 transmitted from the first sensor 111 and the second sensor 112 do not reach the bladder 64, and the reflected waves W from the bladder 64 are not detected by the first sensor 111 and the second sensor 112. That is, in FIG. 16, the urine volume level is “2”.
- the bladder 64 further expands in the height direction and pushes up the small intestine 69. Then, the ultrasonic waves 1111, 1121, 1131, and 1211 transmitted from all the sensors from the first sensor 111 to the fourth sensor 121 reach the bladder 64, and the reflected waves W from the bladder 64 are detected by all the sensors. You. That is, in FIG. 17, the urine volume level is “4”.
- the urine volume level increases as the urine volume in the bladder 64 increases, the urine volume can be estimated based on the urine volume level.
- the time-series change in the urine volume level is stored in the storage unit 26 and / or the user terminal 4.
- the control unit 27 or the user terminal 4 determines that the urine volume is small and the urination timing is short. Then, the control unit 27 sets a standby time (step S26). Then, it is determined whether or not the standby time has elapsed since the last transmission of the ultrasonic wave (step S27). If the standby time has elapsed, the control unit 27 outputs an ultrasonic wave transmission command again (step S21). On the other hand, if the standby time has not elapsed, the control unit 27 waits for the standby time to elapse, and outputs an ultrasonic transmission command again after the standby time has elapsed (step S21). In this way, the control unit 27 periodically issues an ultrasonic transmission command until the urine volume level reaches the threshold.
- the control unit 27 or the user terminal 4 determines that the urine volume has reached the threshold value or higher and urination timing is near. Then, the control unit 27 activates, for example, the notification unit 24, and notifies the user terminal 4 of the urination timing via the communication unit 25 (step S24). This allows the user of the user terminal 4 to be notified of the urination timing and to guide the subject to the toilet.
- the control unit 27 waits for a report that actual urination has occurred (step S25).
- the subject, the caregiver, or the like operates the user terminal 4 to input a report indicating that there was actual urination or a time at which urination occurred, and transmit the time to the urine volume estimation device 10.
- the control unit 27 sets a standby time (step S26), and determines whether or not the standby time has elapsed since the previous transmission of the ultrasonic wave (step S27). If the standby time has elapsed, the control unit 27 outputs an ultrasonic wave transmission command again (step S21). On the other hand, if the standby time has not elapsed, the control unit 27 waits for the standby time to elapse, and outputs an ultrasonic transmission command again after the standby time has elapsed (step S21). In this way, the control unit 27 issues an ultrasonic transmission command at intervals of the standby time, and periodically estimates the amount of urine in the bladder 64 and notifies the urination timing.
- the urine volume estimation device 10 includes the urine volume estimation probe 1 and the main body device unit 2, and includes the first sensor unit 11 and the second sensor unit 2 included in the probe 1.
- the control unit 27 of the main unit 2 estimates the amount of urine in the bladder and urinates Notify the timing. That is, the urine volume estimation method according to the present technology includes a step of transmitting an ultrasonic wave into the body, a step of detecting a reflected wave of the ultrasonic wave from the body, and a step of detecting a reflected wave from the bladder detected from the reflected wave.
- the urination timing notification method in addition to the above-described urine volume estimation method, a step of determining whether the number of sensors that have detected reflected waves from the bladder is equal to or greater than a threshold, For notifying the urination timing.
- the control unit 27 and the user terminal 4 determine the presence or absence of the reflected wave W from the bladder 64 based on whether the reflected wave W from the bladder 64 is completely zero. Instead, when the amplitude of the reflected wave W from the bladder 64 detected by each sensor is equal to or greater than a predetermined threshold value, it is determined that the reflected wave W from the bladder 64 is present, and the amplitude of the reflected wave W from the bladder 64 is determined. Is smaller than the predetermined threshold, it may be determined that there is no reflected wave W from the bladder 64.
- control unit 27 and the user terminal 4 send the ultrasonic wave to the highest position in the height direction of the bladder 64 among the sensors in which the reflected wave W from the bladder 64 is detected.
- the reflected wave W from the bladder 64 is detected by the third sensor 113 in FIG. 16, it is considered that the third sensor 113 and the fourth sensor 121 are reacting, and the urine volume level is determined to be “2”. May be.
- FIG. 17 if the reflected wave W from the bladder 64 is detected by the first sensor 111, it is considered that all the sensors from the first sensor 111 to the fourth sensor 121 are responding, and the urine volume level is reduced. It may be determined to be “4”.
- the configuration may be such that the amount of urine in the bladder 64 is estimated from the time difference between the reflected waves of the front wall and the rear wall of the bladder 64 in consideration of the change in the size of the bladder 64 in the depth direction.
- the control unit 27 and the user terminal 4 may be configured to estimate the urine volume in consideration of not only the presence or absence of the reflected wave W from the bladder 64 but also the presence or absence of a reflected wave from the small intestine 69.
- the threshold of the urine volume level may be set by the initial value stored in the memory 26, and the user or the caregiver can freely change the setting at the user terminal 4. You may do so. Further, the time at which the urination timing is notified and the time at which the report indicating that there was actual urination are input are stored in the storage unit 26 and / or the user terminal 4, and the server 5 performs machine learning to set the threshold. The setting may be automatically changed so that a new threshold can be overwritten in the memory 26 at any time.
- the standby time may be set by the initial value stored in the memory 26, and the target person or the caregiver can freely change the setting at the user terminal 4. Is also good. Further, the standby time may be automatically changed as appropriate based on the urine volume in the bladder estimated by the control unit 27, and for example, the standby time may be set to be shorter as the urine volume increases. Alternatively, the time-series change of the urine volume is stored in the storage unit 26 and / or the user terminal 4, and the standby time is automatically changed by machine learning in the server 5, and the new standby time is changed as needed in the memory 26. May be overwritten.
- the present technology can also provide a training method for a patient having a dysuria such as pollakisuria. If there is a habit of immediately going to the toilet without much urine being accumulated in the bladder 64, the instructor 24 or the user terminal 4 puts up urination until the urination timing is notified, so that the number of times of going to the toilet is increased. Training can be done to reduce. In addition, when the volume in the bladder 64 is small and urination occurs immediately, training to increase the capacity of the bladder 64 is performed by putting up urination until the notification unit 24 or the user terminal 4 notifies the urination timing. It can be performed.
- a dysuria such as pollakisuria.
- Urine volume estimation probe 11 First sensor unit 111 First sensor 112 Second sensor 113 Third sensor 12 Second sensor unit 121 Fourth sensor
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
The purpose of the present invention is to provide: a probe for estimating a urine amount, wherein the probe is compact, causes little discomfort when worn, can be used to efficiently estimate a urine amount in any posture, and can be positionally aligned with ease prior to being worn; and a device for estimating a urine amount using the probe. Provided is a probe for estimating a urine amount, wherein the probe transmits ultrasonic waves into a body and has a plurality of sensors for detecting reflection waves of said ultrasonic waves. The sensors are provided with: a plurality of first sensor units arranged in the width direction of the probe; and a second sensor unit arranged below the first sensor units and provided with at least one sensor. The second sensor unit comprises a position determination sensor for determining the position on which the probe is worn on the body. Also, a device for estimating a urine amount is provided, the device comprising: the probe for estimating a urine amount; and a main body mounting part connected to the probe by a cable.
Description
本技術は、超音波を用いて膀胱の形状を検出する尿量推定用探触子、及びそれを用いて尿量を推定する尿量推定装置に関する。
The present technology relates to a urine volume estimation probe that detects the shape of the bladder using ultrasonic waves, and a urine volume estimation device that estimates the urine volume using the probe.
排尿障害や尿失禁の患者、あるいは自力でトイレに行くことが困難な高齢者等を主な対象として、複数のセンサが配列された探触子を身体の膀胱に対応する位置に当てて、各センサから得られる情報をもとに膀胱内の尿量を推定し、本人(以下、「対象者」という)あるいは介護者に尿量を知らせる技術がある。
For patients with urinary dysfunction or urinary incontinence, or elderly people who have difficulty going to the toilet on their own, apply a probe with multiple sensors to the position corresponding to the bladder of the body. There is a technique for estimating the amount of urine in the bladder based on information obtained from a sensor, and notifying the person (hereinafter, referred to as “subject”) or a caregiver of the amount of urine.
特許文献1には、超音波を膀胱壁面に向けて発振する複数の超音波発振素子が、膀胱の拡張方向(略上下方向)に沿って配列されている超音波尿量センサが開示されている。また、特許文献2には、超音波振動子による複数のセンサが膀胱形状を検出できるような配列と超音波出射角度に設定され、例えば膀胱の底部に出射するセンサ数を最も多くし、底辺側から頂部に向かって複数段のセンサ行を有するように配列される非侵襲尿量推定センサユニットが開示されている。
Patent Literature 1 discloses an ultrasonic urine volume sensor in which a plurality of ultrasonic oscillation elements that oscillate ultrasonic waves toward a bladder wall surface are arranged along a bladder extending direction (substantially up and down direction). . Further, in Patent Document 2, an arrangement is set such that a plurality of sensors using ultrasonic transducers can detect the shape of the bladder and an ultrasonic emission angle. For example, the number of sensors emitted to the bottom of the bladder is maximized, A non-invasive urine volume estimation sensor unit is disclosed that is arranged to have a plurality of sensor rows from the top to the top.
膀胱は、尿量の増加に伴って上部がドーム状に膨らむことが知られている。そのため、これまでの尿量推定用探触子は膀胱の高さ方向(略上下方向)の大きさを精度よく検知できるよう、センサを高さ方向に多く配置することが好ましいと考えられてきた。
It is known that the upper part of the bladder expands in a dome shape with an increase in urine output. For this reason, it has been considered that it is preferable to arrange a large number of sensors in the height direction so far in the urine volume estimation probe so that the size of the bladder in the height direction (substantially the vertical direction) can be accurately detected. .
一方で、排尿障害や尿失禁の患者、あるいは自力でトイレに行くことが困難な高齢者等にとっては、尿量測定の度に探触子を身体に当てるのではなく、探触子を身体に常時装着し、一定時間おきに自動で尿量を推定できることが好ましい。
On the other hand, for patients with dysuria or urinary incontinence, or for elderly people who have difficulty going to the bathroom on their own, the probe should not be applied to the body every time urine volume is measured. It is preferable that it is always worn and that the amount of urine can be automatically estimated at regular intervals.
しかし、従来の尿量推定用探触子は上述の理由から高さ方向に大きさのあるものが多く、例えば対象者が探触子を装着したまま座位になり、膀胱が小腸の重みでつぶされると、高さ方向に配置されたセンサが十分に機能せず、精度よく尿量を推定することが困難となる場合があった。また、高さ方向に大きさのある探触子は、例えば腹部を縮めるような動きをすると身体から浮いてしまい、尿量の推定精度が悪くなる場合があった。
However, conventional probes for estimating urine volume are often large in the height direction for the reasons described above.For example, the subject becomes a sitting position with the probe attached, and the bladder is crushed by the weight of the small intestine. In such a case, the sensors arranged in the height direction may not function sufficiently, and it may be difficult to accurately estimate the urine volume. In addition, a probe having a size in the height direction may be lifted from the body when it moves, for example, to shrink the abdomen, and the estimation accuracy of the urine volume may be deteriorated.
さらに、膀胱内の尿量を精度よく推定するためには尿量推定用探触子を身体の適切な位置に装着することが重要である。ところが、従来の尿量推定用探触子では、対象者自身で恥骨の位置を確認し、それに基づいて膀胱の位置を予測して装着する等の方法がとられており、適切な位置に装着できておらず、尿量の推定精度が悪くなってしまう場合があった。
Furthermore, in order to accurately estimate the urine volume in the bladder, it is important to attach the urine volume estimation probe to an appropriate position on the body. However, in the conventional probe for estimating urine volume, a method of confirming the position of the pubic bone by the subject himself, predicting the position of the bladder based on the position, and mounting the bladder is adopted. In some cases, the accuracy of urine volume estimation was reduced.
そこで、本技術は、コンパクトで装着中の不快感が少なく、どのような姿勢であっても効率よく尿量を推定することができ、さらに装着前の位置合わせも容易に行うことができる尿量推定用探触子、及びそれを用いた尿量推定装置を提供することを目的とする。
Therefore, the present technology is compact, has little discomfort during wearing, can estimate the urine volume efficiently in any posture, and can easily perform positioning before wearing. An object of the present invention is to provide an estimation probe and a urine volume estimation device using the same.
本発明者は、探触子のセンサを高さ方向ではなく、幅方向(略左右方向)に複数配置し、その下方に探触子の装着位置を決定するためのセンサを設けることで、上記課題を解決することができることを見出し、本技術を完成させるに至った。
The present inventor arranges a plurality of sensors of the probe not in the height direction but in the width direction (substantially the left-right direction), and provides a sensor below the sensor for determining the mounting position of the probe. They found that the problem could be solved, and completed this technology.
すなわち、本技術は、体内に超音波を送信し、該超音波の反射波を検出する複数のセンサを有する探触子であり、前記探触子は、第一のセンサ部と、前記第一のセンサ部の下方に配置される第二のセンサ部と、を備え、前記第一のセンサ部は、前記複数のセンサのうち少なくとも2つのセンサが前記探触子の幅方向に配設された構成を有し、前記第二のセンサ部は、前記複数のセンサのうち少なくとも1つのセンサが前記第一のセンサ部の下方に配設された構成を有し、前記第二のセンサ部が、身体に対する前記探触子の装着位置を決定するための位置決め用センサを含む、尿量推定用探触子を提供する。
また、前記尿量推定用探触子と、該探触子とケーブルにより接続される本体装置部と、を備える尿量推定装置も提供する。 That is, the present technology is a probe having a plurality of sensors that transmit ultrasonic waves into a body and detect reflected waves of the ultrasonic waves, wherein the probe has a first sensor unit and the first sensor unit. A second sensor unit disposed below the sensor unit, wherein the first sensor unit has at least two of the plurality of sensors arranged in the width direction of the probe. Having a configuration, wherein the second sensor section has a configuration in which at least one sensor of the plurality of sensors is disposed below the first sensor section, and wherein the second sensor section has A probe for estimating urine volume is provided, which includes a positioning sensor for determining a mounting position of the probe on a body.
Further, the present invention also provides a urine volume estimation device including the urine volume estimation probe and a main unit connected to the probe via a cable.
また、前記尿量推定用探触子と、該探触子とケーブルにより接続される本体装置部と、を備える尿量推定装置も提供する。 That is, the present technology is a probe having a plurality of sensors that transmit ultrasonic waves into a body and detect reflected waves of the ultrasonic waves, wherein the probe has a first sensor unit and the first sensor unit. A second sensor unit disposed below the sensor unit, wherein the first sensor unit has at least two of the plurality of sensors arranged in the width direction of the probe. Having a configuration, wherein the second sensor section has a configuration in which at least one sensor of the plurality of sensors is disposed below the first sensor section, and wherein the second sensor section has A probe for estimating urine volume is provided, which includes a positioning sensor for determining a mounting position of the probe on a body.
Further, the present invention also provides a urine volume estimation device including the urine volume estimation probe and a main unit connected to the probe via a cable.
本技術によれば、探触子の幅方向にセンサを配設することにより、従来の探触子よりも高さ方向においてコンパクトであるため、装着中の不快感が少なく、仰臥位や座位等、どのような姿勢であっても効率よく尿量を推定することができる。また、探触子の装着位置を決定するための位置決め用センサを有することにより、装着前の位置合わせも容易に行うことができる。
According to the present technology, by disposing the sensor in the width direction of the probe, it is more compact in the height direction than the conventional probe, so that discomfort during mounting is less, and the patient is in a supine position, a sitting position, etc. The urine volume can be estimated efficiently regardless of the posture. In addition, by having a positioning sensor for determining the mounting position of the probe, positioning before mounting can be easily performed.
以下、本技術を実施するための好適な実施形態について図面を参照して説明する。なお、以下に説明する実施形態は、本技術の代表的な実施形態を示したものであり、これにより本技術の範囲が狭く解釈されることはない。また、本技術は、下記の実施例及びその変形例を自由に組み合わせることもできる。
Hereinafter, preferred embodiments for carrying out the present technology will be described with reference to the drawings. Note that the embodiments described below are representative embodiments of the present technology, and the scope of the present technology is not construed as being narrow. In addition, the present technology can also freely combine the following embodiments and modifications thereof.
<尿量推定用探触子>
本技術に係る尿量推定用探触子は、体内に超音波を送信し、該超音波の反射波を検出する複数のセンサを有しており、各センサが検出した反射波の情報に基づいて、膀胱内の尿量を推定するために用いられる。なお、尿量を推定する対象者は特に限定されないが、例えば、排尿障害や尿失禁の患者、あるいは自力でトイレに行くことが困難な高齢者等である。本技術に係る尿量推定用探触子は、このような対象者の腹部の皮膚上であって膀胱に対応する位置(例えば、下腹部)に配置され、テープやベルト等で身体に固定される。なお、尿量推定用探触子と腹部との間には、超音波の腹部への透過性を向上するためのジェル等が塗布される。以下、図1及び図2を用いてより詳細に説明する。 <Urine volume estimation probe>
The probe for estimating urine volume according to the present technology has a plurality of sensors that transmit ultrasonic waves into the body and detect reflected waves of the ultrasonic waves, and based on information of the reflected waves detected by each sensor. Is used to estimate the amount of urine in the bladder. The target for estimating the amount of urine is not particularly limited, and is, for example, a patient suffering from urination disorder or urinary incontinence, or an elderly person having difficulty in going to the toilet by himself. The probe for estimating urine volume according to the present technology is arranged on the skin of the abdomen of such a subject and at a position corresponding to the bladder (for example, the lower abdomen), and is fixed to the body with a tape or a belt. You. A gel or the like is applied between the probe for estimating urine volume and the abdomen to improve the permeability of the ultrasound to the abdomen. Hereinafter, this will be described in more detail with reference to FIGS.
本技術に係る尿量推定用探触子は、体内に超音波を送信し、該超音波の反射波を検出する複数のセンサを有しており、各センサが検出した反射波の情報に基づいて、膀胱内の尿量を推定するために用いられる。なお、尿量を推定する対象者は特に限定されないが、例えば、排尿障害や尿失禁の患者、あるいは自力でトイレに行くことが困難な高齢者等である。本技術に係る尿量推定用探触子は、このような対象者の腹部の皮膚上であって膀胱に対応する位置(例えば、下腹部)に配置され、テープやベルト等で身体に固定される。なお、尿量推定用探触子と腹部との間には、超音波の腹部への透過性を向上するためのジェル等が塗布される。以下、図1及び図2を用いてより詳細に説明する。 <Urine volume estimation probe>
The probe for estimating urine volume according to the present technology has a plurality of sensors that transmit ultrasonic waves into the body and detect reflected waves of the ultrasonic waves, and based on information of the reflected waves detected by each sensor. Is used to estimate the amount of urine in the bladder. The target for estimating the amount of urine is not particularly limited, and is, for example, a patient suffering from urination disorder or urinary incontinence, or an elderly person having difficulty in going to the toilet by himself. The probe for estimating urine volume according to the present technology is arranged on the skin of the abdomen of such a subject and at a position corresponding to the bladder (for example, the lower abdomen), and is fixed to the body with a tape or a belt. You. A gel or the like is applied between the probe for estimating urine volume and the abdomen to improve the permeability of the ultrasound to the abdomen. Hereinafter, this will be described in more detail with reference to FIGS.
図1に、本技術の実施形態の一例に係る尿量推定用探触子の概略図を示す。本実施形態に係る尿量推定用探触子1は、略角丸の横長な矩形状で、複数のセンサ111、112、113、121が内蔵されている。
FIG. 1 is a schematic diagram of a urine volume estimation probe according to an example of an embodiment of the present technology. The probe for estimating urine amount 1 according to the present embodiment has a substantially rectangular shape with a rounded corner and a plurality of sensors 111, 112, 113, 121.
本実施形態に係る尿量推定用探触子1は、第一のセンサ部11と、該第一のセンサ部11の下方に配置される第二のセンサ部12と、を少なくとも備える。
第一のセンサ部11は、少なくとも2つのセンサが探触子1の幅方向に配設された構成を有する。第一のセンサ部11は、例えば第1センサ111、第2センサ112、第3センサ113が探触子1の正面視における幅方向に配設された構成であってよい。
一方、第二のセンサ部12は少なくとも1つのセンサが第一のセンサ部11の下方に配設された構成を有する。第二のセンサ部12は、例えば第4センサ121が第一のセンサ部11の下方に配設された構成であってよい。ここで、探触子1の上下方向とは、対象者が探触子1を装着したときの上下方向である。つまり、第二のセンサ部12は、対象者が探触子1を装着したときに第一のセンサ部11の下方に位置する。
また、第二のセンサ部12は身体に対する探触子1の装着位置を決定するための位置決め用センサを含んでいる。本実施形態に係る第二のセンサ部12は、1つのセンサ(例えば第4センサ121)が尿量推定及び探触子1の位置決めの両方の用途で用いられてもよい。第二のセンサ部12が2つ以上のセンサを有する場合には、第二のセンサ部12を構成する全てのセンサが尿量推定及び探触子1の位置決めの両方の用途で用いられてもよく、あるいは、第二のセンサ部12が、尿量推定用センサと、位置決め用センサとを別々に設ける構成であってもよい。 The urinevolume estimation probe 1 according to the present embodiment includes at least a first sensor unit 11 and a second sensor unit 12 disposed below the first sensor unit 11.
Thefirst sensor unit 11 has a configuration in which at least two sensors are arranged in the width direction of the probe 1. The first sensor unit 11 may have a configuration in which, for example, a first sensor 111, a second sensor 112, and a third sensor 113 are arranged in the width direction of the probe 1 in a front view.
On the other hand, thesecond sensor unit 12 has a configuration in which at least one sensor is disposed below the first sensor unit 11. The second sensor unit 12 may have a configuration in which, for example, the fourth sensor 121 is disposed below the first sensor unit 11. Here, the vertical direction of the probe 1 is the vertical direction when the subject wears the probe 1. That is, the second sensor unit 12 is located below the first sensor unit 11 when the subject wears the probe 1.
Thesecond sensor section 12 includes a positioning sensor for determining the mounting position of the probe 1 on the body. In the second sensor unit 12 according to the present embodiment, one sensor (for example, the fourth sensor 121) may be used for both the urine volume estimation and the positioning of the probe 1. When the second sensor unit 12 has two or more sensors, all the sensors constituting the second sensor unit 12 may be used for both the urine volume estimation and the positioning of the probe 1. Alternatively, the second sensor unit 12 may have a configuration in which a urine volume estimation sensor and a positioning sensor are separately provided.
第一のセンサ部11は、少なくとも2つのセンサが探触子1の幅方向に配設された構成を有する。第一のセンサ部11は、例えば第1センサ111、第2センサ112、第3センサ113が探触子1の正面視における幅方向に配設された構成であってよい。
一方、第二のセンサ部12は少なくとも1つのセンサが第一のセンサ部11の下方に配設された構成を有する。第二のセンサ部12は、例えば第4センサ121が第一のセンサ部11の下方に配設された構成であってよい。ここで、探触子1の上下方向とは、対象者が探触子1を装着したときの上下方向である。つまり、第二のセンサ部12は、対象者が探触子1を装着したときに第一のセンサ部11の下方に位置する。
また、第二のセンサ部12は身体に対する探触子1の装着位置を決定するための位置決め用センサを含んでいる。本実施形態に係る第二のセンサ部12は、1つのセンサ(例えば第4センサ121)が尿量推定及び探触子1の位置決めの両方の用途で用いられてもよい。第二のセンサ部12が2つ以上のセンサを有する場合には、第二のセンサ部12を構成する全てのセンサが尿量推定及び探触子1の位置決めの両方の用途で用いられてもよく、あるいは、第二のセンサ部12が、尿量推定用センサと、位置決め用センサとを別々に設ける構成であってもよい。 The urine
The
On the other hand, the
The
本実施形態に係るセンサ111、112、113、121は、それぞれ圧電素子を有しており、超音波の送受信を行う。具体的には、圧電素子の両面に電極を形成し、両電極間に電圧を印加すると、圧電素子がその駆動電圧に応じた振動をして超音波を発信する一方、超音波を受信すると、その振動に応じた電気信号を発生するように構成される。各センサの形状は特に限定されないが、例えば円形の薄板状であってもよいし、正方形や、長方形であってもよい。
セ ン サ The sensors 111, 112, 113, and 121 according to the present embodiment each have a piezoelectric element and transmit and receive ultrasonic waves. Specifically, when electrodes are formed on both sides of the piezoelectric element and a voltage is applied between the two electrodes, the piezoelectric element vibrates according to the drive voltage to transmit ultrasonic waves, while receiving ultrasonic waves, It is configured to generate an electric signal according to the vibration. The shape of each sensor is not particularly limited, but may be, for example, a circular thin plate, a square, or a rectangle.
図2に本実施形態に係る尿量推定用探触子の側面概略図を示す。図2に示すように、本実施形態に係るセンサ111、112、113、121は、それぞれ各センサの配列面l10に直交する軸l11又はl12に対して所定の角度θをもって配置され、それぞれの角度θで超音波を体内に送信する。
FIG. 2 is a schematic side view of the urine volume estimation probe according to the present embodiment. As shown in FIG. 2, sensor 111,112,113,121 according to the present embodiment is arranged at a predetermined angle θ relative to the axis l 11 or l 12 perpendicular to the array surface l 10 of each sensor, respectively, Ultrasound is transmitted into the body at each angle θ.
第1センサ111、第2センサ112、第3センサ113は、膀胱が膨張する方向(高さ方向)において放射状に超音波1111、1121、1131を送信するように配置されていることが好ましい。すなわち、超音波送信角度θ111、θ112(図2においては0度であるため省略)、θ113は、それぞれ異なっていることが好ましい。超音波送信角度θ111、θ112、θ113は、軸l11の上方を正の向きとすると、-40~+40度の範囲であることが好ましい。各センサの超音波送信角度θが異なることにより、膀胱の情報を効率よく得ることができる。
It is preferable that the first sensor 111, the second sensor 112, and the third sensor 113 are arranged so as to transmit ultrasonic waves 1111, 1121, and 1311 in a radial direction in a direction (height direction) in which the bladder expands. In other words, it is preferable that the ultrasonic transmission angles θ 111 , θ 112 (omitted in FIG. 2 because they are 0 degrees) and θ 113 are different from each other. The ultrasonic transmission angles θ 111 , θ 112 , and θ 113 are preferably in the range of −40 to +40 degrees when the direction above the axis l 11 is a positive direction. When the ultrasonic transmission angle θ of each sensor is different, information on the bladder can be obtained efficiently.
また、第4センサ121は、センサの配列面l10に直交する軸l12に対して下方に向かって超音波1211を送信するように配置されていることが好ましい。超音波1211が下方に向かって送信されるように構成することで、探触子1が膀胱の下端からより上端に近い位置まで超音波を送信することができ、尿量をより精度よく測定できる。第4センサ121の超音波送信角度θ121は、軸l12の上方を正の向きとすると、-40~0度の範囲で配置されることが好ましい。
The fourth sensor 121 is preferably disposed so as to transmit ultrasonic waves 1211 downward with respect to the axis l 12 perpendicular to the array surface l 10 of the sensor. By configuring so that the ultrasonic wave 1211 is transmitted downward, the probe 1 can transmit the ultrasonic wave from the lower end of the bladder to a position closer to the upper end, and the urine volume can be measured more accurately. . The ultrasonic transmission angle θ 121 of the fourth sensor 121 is preferably arranged in a range of −40 to 0 degrees when the upper side of the axis l 12 is set to a positive direction.
さらに、第二のセンサ部12を構成する第4センサ121の超音波送信角度θ121は、第一のセンサ部11を構成する第1センサ111、第2センサ112、第3センサ113の超音波送信角度θ111、θ112、θ113よりも負に大きいことが好ましい。θ121を負に大きくすることで、第4センサ121で確実に膀胱の下端又は恥骨の上縁部を検出しつつ、第1センサ111、第2センサ112、第3センサ113で膀胱の上端までの情報を効率よく得ることができる。
Further, the ultrasonic transmission angle θ 121 of the fourth sensor 121 constituting the second sensor unit 12 is determined by the ultrasonic wave of the first sensor 111, the second sensor 112, and the third sensor 113 constituting the first sensor unit 11. It is preferable that the transmission angles θ 111 , θ 112 , and θ 113 be negatively larger than the transmission angles θ 111 , θ 112 , and θ 113 . By increasing θ 121 to a negative value, the fourth sensor 121 reliably detects the lower end of the bladder or the upper edge of the pubic bone, and the first sensor 111, the second sensor 112, and the third sensor 113 reach the upper end of the bladder. Information can be obtained efficiently.
なお、上述した尿量推定用探触子1において、第一のセンサ部11を構成する各センサは幅方向に一列に配設されていてもよいが、高さ方向に位置をずらして配設されていてもよい。
In the urine volume estimation probe 1 described above, the sensors constituting the first sensor unit 11 may be arranged in a line in the width direction, but are arranged with their positions shifted in the height direction. It may be.
<尿量推定装置>
本技術に係る尿量推定装置は、上述の尿量推定用探触子から得られた情報に基づいて、探触子の位置に係る情報や、膀胱内の尿量に係る情報等を知らせるために用いられる。以下、図3及び図4を用いてより詳細に説明する。 <Urine volume estimation device>
The urine volume estimating apparatus according to the present technology is based on the information obtained from the urine volume estimating probe, and informs information related to the position of the probe and information related to urine volume in the bladder. Used for Hereinafter, this will be described in more detail with reference to FIGS.
本技術に係る尿量推定装置は、上述の尿量推定用探触子から得られた情報に基づいて、探触子の位置に係る情報や、膀胱内の尿量に係る情報等を知らせるために用いられる。以下、図3及び図4を用いてより詳細に説明する。 <Urine volume estimation device>
The urine volume estimating apparatus according to the present technology is based on the information obtained from the urine volume estimating probe, and informs information related to the position of the probe and information related to urine volume in the bladder. Used for Hereinafter, this will be described in more detail with reference to FIGS.
図3に、本技術の実施形態の一例に係る尿量推定装置の概略図を示す。本実施形態に係る尿量推定装置10は、尿量推定用探触子1と、該探触子1とケーブル3により接続される本体装置部2と、を備える。なお、本実施形態に係るケーブル3は、探触子1の正面視における幅方向の側面から延設されていることが好ましい。ケーブル3が探触子1の高さ方向ではなく、幅方向から延設されることにより、対象者の身体の動きの邪魔になりにくく、装着中の不快感をより軽減することができる。本実施形態に係る本体装置部2は、例えば対象者の衣服等に装着される。
FIG. 3 shows a schematic diagram of a urine volume estimation device according to an example of an embodiment of the present technology. The urine volume estimation device 10 according to the present embodiment includes a urine volume estimation probe 1 and a main unit 2 connected to the probe 1 by a cable 3. Note that the cable 3 according to the present embodiment is preferably extended from the side surface in the width direction of the probe 1 in a front view. By extending the cable 3 not in the height direction but in the width direction of the probe 1, the cable 3 is less likely to hinder the movement of the subject's body, and discomfort during wearing can be further reduced. The main unit 2 according to the present embodiment is mounted on, for example, the clothes of the subject.
図4に、本技術の実施形態の一例に係る尿量推定装置のブロック図を示す。本実施形態に係る本体装置部2は、第一のセンサ部11及び第二のセンサ部12へ駆動電圧を出力する送信部21と、該センサから電気信号を受信する受信部22と、送信部21及び受信部22に接続されるセンサを切り替えるスイッチ23と、外部に種々の情報を報知するための報知部24と、外部との通信を行う通信部25と、各種データを記憶する記憶部26と、本体装置部2の全体的な制御を行う制御部27と、各種パラメータを格納するメモリ28と、を有している。
4 shows a block diagram of a urine volume estimation device according to an example of an embodiment of the present technology. The main body unit 2 according to the present embodiment includes a transmitting unit 21 that outputs a driving voltage to the first sensor unit 11 and the second sensor unit 12, a receiving unit 22 that receives an electric signal from the sensor, and a transmitting unit. A switch 23 for switching sensors connected to the reception unit 21 and the reception unit 22, a notification unit 24 for notifying various information to the outside, a communication unit 25 for communicating with the outside, and a storage unit 26 for storing various data And a control unit 27 that performs overall control of the main body unit 2 and a memory 28 that stores various parameters.
本実施形態に係る送信部21は、第一のセンサ部11及び第二のセンサ部12に駆動電圧を供給する。送信部21は、パルス発生器21aと増幅部21bとを有している。パルス発生器21aは、所定のパルス幅及び電圧値のパルス信号を発生させる。パルス発生器21aは、パルス幅、パルス数、及び周波数を変更可能に構成されていてもよい。増幅部21bは、パルス発生器21aからのパルス信号を増幅し、駆動電圧として第一のセンサ部11及び第二のセンサ部12へ出力する。
送信 The transmission unit 21 according to the present embodiment supplies a drive voltage to the first sensor unit 11 and the second sensor unit 12. The transmission section 21 has a pulse generator 21a and an amplification section 21b. The pulse generator 21a generates a pulse signal having a predetermined pulse width and a predetermined voltage value. The pulse generator 21a may be configured so that the pulse width, the number of pulses, and the frequency can be changed. The amplifying unit 21b amplifies the pulse signal from the pulse generator 21a and outputs it as a drive voltage to the first sensor unit 11 and the second sensor unit 12.
本実施形態に係る受信部22は、第一のセンサ部11及び第二のセンサ部12からの電気信号を受信する。受信部22は、増幅部22aと、検波部22bと、A/D変換部22cとを有している。増幅部22aは、第一のセンサ部11及び第二のセンサ部12からの受信信号を増幅して、検波部22bへ出力する。検波部22bは、増幅部22aから受け取った受信信号(例えば、振幅変調波)を、包絡線検波等の方法で復調し、処理後の信号をA/D変換部22cへ出力する。A/D変換部22cは、検波部22bからの受信信号をA/D変換して、制御部27へ出力する。
受 信 The receiving unit 22 according to the present embodiment receives electric signals from the first sensor unit 11 and the second sensor unit 12. The receiving unit 22 has an amplifying unit 22a, a detecting unit 22b, and an A / D converting unit 22c. The amplification unit 22a amplifies signals received from the first sensor unit 11 and the second sensor unit 12, and outputs the signals to the detection unit 22b. The detector 22b demodulates the received signal (for example, an amplitude modulated wave) received from the amplifier 22a by a method such as envelope detection and outputs the processed signal to the A / D converter 22c. The A / D converter 22c performs A / D conversion on the received signal from the detector 22b and outputs the signal to the controller 27.
本実施形態に係るスイッチ23は、第一のセンサ部11及び第二のセンサ部12を構成するセンサの中から送信部21及び受信部22に接続されるセンサを選択する。例えば、尿量推定用探触子の位置決めを行うモードの場合は、第二のセンサ部12の位置決め用センサのみを選択する。また、尿量の推定及び排尿タイミングを報知するモードの場合は、第一のセンサ部11及び第二のセンサ部12の中から択一的に切り替える。
ス イ ッ チ The switch 23 according to the present embodiment selects a sensor connected to the transmitting unit 21 and the receiving unit 22 from among the sensors constituting the first sensor unit 11 and the second sensor unit 12. For example, in the case of the mode for positioning the urine volume estimation probe, only the positioning sensor of the second sensor unit 12 is selected. In the case of the mode for estimating the urine volume and notifying the urination timing, the mode is selectively switched from the first sensor unit 11 and the second sensor unit 12.
本実施形態に係る報知部24は、例えばバイブレータやLEDランプ、アラーム等である。報知部24がLEDランプである場合は、図3に示すように本体装置部2に報知部24が設けられうる。バイブレータの振動や、LEDランプの点灯態様、音等によって、対象者に種々の情報(例えば、膀胱に対する探触子1の位置や、排尿タイミングの到来等)を報知する。
The notification unit 24 according to the present embodiment is, for example, a vibrator, an LED lamp, an alarm, or the like. When the notification unit 24 is an LED lamp, the notification unit 24 may be provided in the main body unit 2 as shown in FIG. The subject is notified of various information (for example, the position of the probe 1 with respect to the bladder, the arrival of urination timing, and the like) by the vibration of the vibrator, the lighting mode of the LED lamp, the sound, and the like.
本実施形態に係る通信部25は、外部の通信装置と通信を行う。例えば、通信部25は、Bluetooth(登録商標)規格の通信を行う。通信部25は、後述する尿量推定システム100において、ユーザ端末4と通信を行う。
通信 The communication unit 25 according to the present embodiment communicates with an external communication device. For example, the communication unit 25 performs communication according to the Bluetooth (registered trademark) standard. The communication unit 25 communicates with the user terminal 4 in the urine volume estimation system 100 described later.
本実施形態に係る記憶部26は、受信部22から受け取った受信信号を一時的に保存する。また、記憶部26は、後述する尿量推定システム100において、ユーザ端末4から通信部25を介して取得した情報等も記憶する。
記憶 The storage unit 26 according to the present embodiment temporarily stores the reception signal received from the reception unit 22. The storage unit 26 also stores information acquired from the user terminal 4 via the communication unit 25 in the urine volume estimation system 100 described below.
本実施形態に係る制御部27は、1又は複数のプロセッサを有し、送信部21、受信部22、スイッチ23、報知部24、通信部25を制御する。
The control unit 27 according to the present embodiment has one or a plurality of processors, and controls the transmission unit 21, the reception unit 22, the switch 23, the notification unit 24, and the communication unit 25.
具体的には、制御部27は、スイッチ23を制御して、送信部21及び受信部22に接続されるセンサを切り替える。制御部27は、送信部21を制御して、駆動電圧を第一のセンサ部11及び第二のセンサ部12へ出力させる。また、制御部27は、受信部22を制御して、第一のセンサ部11及び第二のセンサ部12の受信信号をデジタル信号に変換させ、受信部22からの受信信号に平均化処理等の信号処理を行う。さらに、制御部27は、受信部22からの受信信号に基づいて膀胱に対する探触子1の位置や、膀胱内の尿量、排尿タイミングの到来等を判定し、その解析結果に応じた処理を行う(例えば、報知部24を作動させる)。なお、排尿タイミングの到来の判定は、後述するユーザ端末4で行われてもよい。また、制御部27は、通信部25を制御して、受信部22からの受信信号に関する情報を外部に送信する。また、制御部27は、通信部25を介して外部からの信号を受信し、その信号に応じた処理を行う(例えば、報知部24を作動させる)。
Specifically, the control unit 27 controls the switch 23 to switch the sensors connected to the transmission unit 21 and the reception unit 22. The control unit 27 controls the transmission unit 21 to output a drive voltage to the first sensor unit 11 and the second sensor unit 12. Further, the control unit 27 controls the receiving unit 22 to convert the received signals of the first sensor unit 11 and the second sensor unit 12 into digital signals, and performs averaging processing on the received signals from the receiving unit 22. Is performed. Further, the control unit 27 determines the position of the probe 1 with respect to the bladder, the amount of urine in the bladder, the arrival of urination timing, and the like based on the reception signal from the reception unit 22, and performs processing according to the analysis result. (For example, the notification unit 24 is operated). Note that the determination of the arrival of urination timing may be performed by the user terminal 4 described later. Further, the control unit 27 controls the communication unit 25 to transmit information on a signal received from the reception unit 22 to the outside. Further, the control unit 27 receives a signal from the outside via the communication unit 25 and performs a process according to the signal (for example, activates the notification unit 24).
本実施形態に係るメモリ28は、超音波の周波数、出力、パルス数、ゲイン(増幅率)、待機時間等のパラメータを格納する。
The memory 28 according to the present embodiment stores parameters such as the frequency, output, number of pulses, gain (amplification factor), and standby time of the ultrasonic wave.
なお、上述した尿量推定装置10において、尿量推定用探触子1と本体装置部2とは、有線で接続されず、無線通信であってもよい。
In the urine volume estimation device 10 described above, the probe 1 for estimating urine volume and the main unit 2 may be wirelessly connected without being connected by wire.
<尿量推定システム>
図5に、本技術の実施形態の一例に係る尿量推定システムの概略図を示す。本実施形態に係る尿量推定システム100は、上述の尿量推定装置10と、尿量推定装置10から送られてくる信号を受信し、アプリケーション等を提供するユーザ端末4と、主にデータベースとして機能するサーバ5とを備えている。尿量推定装置10は、ユーザ端末4と無線通信を行い、ユーザ端末4は、サーバ5と無線通信を行う。 <Urine volume estimation system>
FIG. 5 is a schematic diagram of a urine volume estimation system according to an example of an embodiment of the present technology. The urinevolume estimation system 100 according to the present embodiment includes the above-described urine volume estimation device 10, a user terminal 4 that receives a signal transmitted from the urine volume estimation device 10 and provides an application or the like, and mainly as a database. And a functioning server 5. The urine volume estimation device 10 performs wireless communication with the user terminal 4, and the user terminal 4 performs wireless communication with the server 5.
図5に、本技術の実施形態の一例に係る尿量推定システムの概略図を示す。本実施形態に係る尿量推定システム100は、上述の尿量推定装置10と、尿量推定装置10から送られてくる信号を受信し、アプリケーション等を提供するユーザ端末4と、主にデータベースとして機能するサーバ5とを備えている。尿量推定装置10は、ユーザ端末4と無線通信を行い、ユーザ端末4は、サーバ5と無線通信を行う。 <Urine volume estimation system>
FIG. 5 is a schematic diagram of a urine volume estimation system according to an example of an embodiment of the present technology. The urine
本実施形態に係るユーザ端末4は、例えば、スマートフォンやタブレット端末でありうる。尿量推定装置10をユーザ端末4にあらかじめ登録しておくことで、尿量推定装置10とユーザ端末4との間で通信が可能となる。該ユーザ端末4は1台に限らず、複数台(例えば、介護者のユーザ端末4と対象者のユーザ端末4)であってもよい。ユーザ端末4は、尿量推定装置10から送信されてくる受信信号に基づいて膀胱内の尿量の推定や、排尿タイミングの判定等を行う。
ユ ー ザ The user terminal 4 according to the present embodiment can be, for example, a smartphone or a tablet terminal. By registering the urine volume estimation device 10 in the user terminal 4 in advance, communication between the urine volume estimation device 10 and the user terminal 4 becomes possible. The number of the user terminals 4 is not limited to one, but may be a plurality (for example, a caregiver user terminal 4 and a target person user terminal 4). The user terminal 4 estimates the amount of urine in the bladder and determines the timing of urination based on the reception signal transmitted from the urine amount estimation device 10.
ユーザ端末4は、対象者を特定するユーザID、尿量推定装置10を特定する機器ID等の対象者に関する情報;尿量推定装置10から送信されてくる受信信号に関する情報;膀胱内の尿量の推定や、排尿タイミングの判定等を行うためのプログラムやデータ等;膀胱内の尿量や排尿タイミング等に関する解析結果;等を記憶している。また、ユーザ端末4は、尿量推定システム100専用のアプリケーションをダウンロードしておくことで、対象者の膀胱内の尿量や、排尿タイミング等の情報をユーザに知らせたり、サーバ5と情報の送受信を行ったりすることができる。
The user terminal 4 includes information on the target person such as a user ID for specifying the target person and a device ID for specifying the urine volume estimation device 10; information on a reception signal transmitted from the urine volume estimation device 10; urine volume in the bladder And data and the like for estimating the urine and determining the urination timing; analysis results relating to urine volume in the bladder, urination timing, and the like; In addition, the user terminal 4 downloads an application dedicated to the urine volume estimation system 100, thereby notifying the user of information such as the urine volume in the subject's bladder and urination timing, and transmitting / receiving information to / from the server 5. Or you can go.
本実施形態に係るサーバ5は、いわゆるクラウドコンピューティングを行う。サーバ5は、ユーザ端末4をあらかじめ登録しておくことでユーザ端末4と通信可能となり、ユーザ端末4の情報が尿量推定装置10と紐づけて記憶されている。ユーザ端末4に専用のアプリケーションをダウンロードしておくと、例えば1日に1回の頻度で、ユーザ端末4とサーバ5との間で情報が送受信される。
サ ー バ The server 5 according to the present embodiment performs so-called cloud computing. The server 5 can communicate with the user terminal 4 by registering the user terminal 4 in advance, and information of the user terminal 4 is stored in association with the urine volume estimation device 10. When a dedicated application is downloaded to the user terminal 4, information is transmitted and received between the user terminal 4 and the server 5, for example, once a day.
サーバ5は、対象者を特定するユーザID、尿量推定装置10を特定する機器ID、ユーザ端末4を特定する端末ID等の対象者に関する情報;ユーザ端末4から送信されてくる膀胱内の尿量や排尿タイミング等に関する解析結果のデータ;等を記憶している。また、対象者の排尿タイミングを判定する際の閾値や、排尿タイミングを報知する時期に関する情報を機械学習させることもできる。
The server 5 includes information on the target such as a user ID for specifying the target, a device ID for specifying the urine volume estimation device 10, and a terminal ID for specifying the user terminal 4; urine in the bladder transmitted from the user terminal 4. Analysis result data relating to the amount, urination timing, and the like are stored. Further, it is possible to machine-learn a threshold value for judging the urination timing of the target person and information on the timing of notifying the urination timing.
<尿量推定装置の使用方法及び動作例>
以下、本技術に係る尿量推定装置の使用方法及び動作例について説明する。 <Usage method and operation example of urine volume estimation device>
Hereinafter, a usage method and an operation example of the urine volume estimation device according to the present technology will be described.
以下、本技術に係る尿量推定装置の使用方法及び動作例について説明する。 <Usage method and operation example of urine volume estimation device>
Hereinafter, a usage method and an operation example of the urine volume estimation device according to the present technology will be described.
(1)尿量推定用探触子の位置決め
本技術に係る尿量推定装置は、上述の位置決め用センサにより検出される反射波の情報に基づいて、膀胱に対する尿量推定用探触子の位置に係る情報を提示し、適切な位置に該探触子が装着されるように位置決めを行うことができる。以下、図6を用いて、尿量推定用探触子の位置決めを行う際の尿量推定システムの動作例について説明する。なお、本明細書では第二のセンサ部12の第4センサ121が尿量推定及び探触子1の位置決めの両方の用途で用いられる例を示すが、第4センサ121とは別に位置決め用センサを設ける場合は、以下の説明において第4センサ121を該位置決め用センサに置き換えて適用すればよい。 (1) Positioning of urine volume estimation probe The urine volume estimation device according to the present technology is configured to position the urine volume estimation probe with respect to the bladder based on information of the reflected wave detected by the above-described positioning sensor. And the positioning can be performed so that the probe is mounted at an appropriate position. Hereinafter, an operation example of the urine volume estimation system when positioning the urine volume estimation probe will be described with reference to FIG. In this specification, an example in which thefourth sensor 121 of the second sensor unit 12 is used for both of the urine volume estimation and the positioning of the probe 1 is shown, but a positioning sensor separate from the fourth sensor 121 is used. Is provided, the fourth sensor 121 may be replaced with the positioning sensor in the following description.
本技術に係る尿量推定装置は、上述の位置決め用センサにより検出される反射波の情報に基づいて、膀胱に対する尿量推定用探触子の位置に係る情報を提示し、適切な位置に該探触子が装着されるように位置決めを行うことができる。以下、図6を用いて、尿量推定用探触子の位置決めを行う際の尿量推定システムの動作例について説明する。なお、本明細書では第二のセンサ部12の第4センサ121が尿量推定及び探触子1の位置決めの両方の用途で用いられる例を示すが、第4センサ121とは別に位置決め用センサを設ける場合は、以下の説明において第4センサ121を該位置決め用センサに置き換えて適用すればよい。 (1) Positioning of urine volume estimation probe The urine volume estimation device according to the present technology is configured to position the urine volume estimation probe with respect to the bladder based on information of the reflected wave detected by the above-described positioning sensor. And the positioning can be performed so that the probe is mounted at an appropriate position. Hereinafter, an operation example of the urine volume estimation system when positioning the urine volume estimation probe will be described with reference to FIG. In this specification, an example in which the
まず、制御部27が超音波の送信指令を出力する(ステップS11)。具体的には、制御部27が、第4センサ121と送信部21及び受信部22とが接続されるようにスイッチ23を制御し、送信部21へパルス信号の生成指令を出力する。この生成指令が、尿量推定用探触子1の位置決めのトリガとなり、送信部21は、生成指令に基づく駆動電圧を第4センサ121に供給する。第4センサ121は、駆動電圧に基づく超音波を送信する。制御部27は、生成指令を所定の周期で出力する。
First, the control unit 27 outputs an ultrasonic wave transmission command (step S11). Specifically, the control unit 27 controls the switch 23 so that the fourth sensor 121 is connected to the transmission unit 21 and the reception unit 22, and outputs a pulse signal generation command to the transmission unit 21. The generation command serves as a trigger for positioning the urine volume estimation probe 1, and the transmission unit 21 supplies a driving voltage based on the generation command to the fourth sensor 121. The fourth sensor 121 transmits an ultrasonic wave based on the drive voltage. The control unit 27 outputs the generation command at a predetermined cycle.
続いて、第4センサ121が超音波を受信する(ステップS12)と、受信部22で受信信号の処理が行われる。制御部27は、該受信信号に膀胱からの反射波が含まれているかを判定する(ステップS13)。
(4) Subsequently, when the fourth sensor 121 receives the ultrasonic wave (Step S12), the receiving unit 22 processes the received signal. The control unit 27 determines whether the received signal includes a reflected wave from the bladder (Step S13).
ここで、膀胱からの反射波の有無と尿量推定用探触子の位置との関係について図7~図12を用いて説明する。図7~図9は人体の下腹部の模式断面図である。図10~図12は検出される反射波の一例である。
Here, the relationship between the presence or absence of a reflected wave from the bladder and the position of the urine volume estimation probe will be described with reference to FIGS. 7 to 9 are schematic sectional views of the lower abdomen of the human body. FIGS. 10 to 12 show examples of the detected reflected wave.
図7~図9に示すように、腹部表面から背中に向かって、皮下脂肪61、筋肉62、恥骨63、膀胱64、精嚢65若しくは前立腺66(男性の場合)又は膣(女性の場合)、直腸67、背骨(仙骨)68等が並んでいる。膀胱64の上には小腸69が位置し、膀胱64の前側の斜め下には、恥骨63が位置している。
As shown in FIGS. 7 to 9, from the surface of the abdomen to the back, subcutaneous fat 61, muscle 62, pubis 63, bladder 64, seminal vesicle 65 or prostate 66 (for male) or vagina (for female), The rectum 67, the spine (sacrum) 68 and the like are arranged. The small intestine 69 is located above the bladder 64, and the pubic bone 63 is located diagonally below and in front of the bladder 64.
尿量推定用探触子1の装着位置を決定する際は、腹部の上側から徐々に探触子1を当てていく。図7に示すように、探触子1の第4センサ121から送信される超音波1211が小腸69に到達しており、膀胱64に届いていない場合は、図10に示すような反射波が検出される。
When determining the mounting position of the urine volume estimation probe 1, the probe 1 is gradually applied from above the abdomen. As shown in FIG. 7, when the ultrasonic wave 1211 transmitted from the fourth sensor 121 of the probe 1 reaches the small intestine 69 and does not reach the bladder 64, a reflected wave as shown in FIG. Is detected.
次に、図8に示すように探触子1を少し下方に動かす。すると、超音波1211が膀胱64に到達するようになり、図11に示すように、膀胱64の後壁64aからの反射波W(以下、「膀胱64からの反射波W」ともいう)が検出されるようになる。
Next, as shown in FIG. 8, the probe 1 is slightly moved downward. Then, the ultrasonic wave 1211 reaches the bladder 64, and as shown in FIG. 11, a reflected wave W from the back wall 64a of the bladder 64 (hereinafter, also referred to as a "reflected wave W from the bladder 64") is detected. Will be done.
さらに、図9に示すように探触子1を下方に動かすと、超音波1211が膀胱64よりも下方に向かって送信され、図12に示すように、膀胱64からの反射波Wが検出できなくなる。
Further, when the probe 1 is moved downward as shown in FIG. 9, the ultrasonic wave 1211 is transmitted below the bladder 64, and the reflected wave W from the bladder 64 can be detected as shown in FIG. Disappears.
このように、膀胱64からの反射波Wの有無によって、尿量推定用探触子1の位置決めを行うことができる。
As described above, the urine volume estimation probe 1 can be positioned based on the presence or absence of the reflected wave W from the bladder 64.
制御部27は、第4センサ121の受信信号に膀胱64からの反射波Wが含まれている場合は膀胱64を検知できていると判定し、例えば、報知部24のLEDランプが緑色に点灯するよう、報知部24へ指令を出力する(ステップS141)。一方、該受信信号に膀胱64からの反射波Wが含まれていない場合は膀胱64が検知できていないと判定し、例えば、報知部24のLEDランプが赤色に点灯するよう、報知部24へ指令を出力する(ステップS142)。なお、このとき、報知部24だけでなく、ユーザ端末4のディスプレイに緑点灯や、赤点灯の表示を行ってもよい。また、ユーザ端末4に図13のような指示画面41を提示させ、尿量推定用探触子1の最適な装着位置を指示するようにしてもよい。
The control unit 27 determines that the bladder 64 has been detected when the reflected wave W from the bladder 64 is included in the reception signal of the fourth sensor 121. For example, the LED lamp of the notification unit 24 lights up in green. Then, a command is output to the notifying unit 24 (step S141). On the other hand, when the reflected wave W from the bladder 64 is not included in the received signal, it is determined that the bladder 64 has not been detected, and, for example, the notification unit 24 is turned on so that the LED lamp of the notification unit 24 lights red. A command is output (step S142). At this time, not only the notification unit 24 but also the display of the user terminal 4 may be displayed in green or red. Alternatively, the user terminal 4 may present an instruction screen 41 as shown in FIG. 13 to indicate an optimal mounting position of the urine volume estimation probe 1.
その後、制御部27が待機時間を設定し(ステップS151、S152)、前回の超音波1211の送信から待機時間が経過したか否かを判定する(ステップS161、S162)。待機時間が経過していれば、制御部27は再度超音波の送信指令を出力する(ステップS11)。一方、待機時間が経過していない場合は、制御部27は待機時間が経過するのを待機し、待機時間が経過した後に再度超音波の送信指令を出力する(ステップS11)。このようにして、制御部27は、超音波の送信指令を待機時間の間隔で行い、膀胱64に対する尿量推定用探触子1の位置の判定を定期的に行う。
Then, the control unit 27 sets a standby time (steps S151 and S152), and determines whether the standby time has elapsed since the previous transmission of the ultrasonic wave 1211 (steps S161 and S162). If the standby time has elapsed, the control unit 27 outputs an ultrasonic transmission command again (step S11). On the other hand, if the standby time has not elapsed, the control unit 27 waits for the standby time to elapse, and outputs an ultrasonic transmission command again after the standby time has elapsed (step S11). In this way, the control unit 27 issues an ultrasonic transmission command at intervals of the standby time, and periodically determines the position of the urine volume estimation probe 1 with respect to the bladder 64.
以上のように、本技術に係る尿量推定装置10は、尿量推定用探触子1と本体装置部2とを備え、該探触子1が備える第二のセンサ部12の第4センサ121により検出される膀胱64からの反射波Wに基づいて、本体装置部2の制御部27が膀胱64に対する探触子1の位置の判定を行う。すなわち、本技術に係る尿量推定用探触子の装着位置決定方法は、体内に超音波を送信する工程と、体内からの該超音波の反射波を検出する工程と、該反射波から検出される膀胱からの反射波に基づいて膀胱に対する探触子の位置を判定する工程とを含む。
As described above, the urine volume estimation device 10 according to the present technology includes the urine volume estimation probe 1 and the main device unit 2, and the fourth sensor of the second sensor unit 12 included in the probe 1. Based on the reflected wave W from the bladder 64 detected by 121, the control unit 27 of the main device 2 determines the position of the probe 1 with respect to the bladder 64. That is, the method for determining the mounting position of the urine volume estimation probe according to the present technology includes the steps of transmitting ultrasonic waves into the body, detecting reflected waves of the ultrasonic waves from the body, and detecting from the reflected waves. Determining the position of the probe with respect to the bladder based on the reflected waves from the bladder.
なお、上述した尿量推定システムの動作例において、制御部27は、膀胱64の下端64bを基準にして尿量推定用探触子1の最適な装着位置を決定してもよく、恥骨63の上縁部を基準にして最適な装着位置を決定してもよい。また、膀胱64の下端及び恥骨63の上縁部の両方を基準にして、最適な装着位置を決定してもよい。
In the operation example of the urine volume estimation system described above, the control unit 27 may determine the optimal mounting position of the urine volume estimation probe 1 based on the lower end 64b of the bladder 64, The optimal mounting position may be determined based on the upper edge. Further, the optimal mounting position may be determined based on both the lower end of the bladder 64 and the upper edge of the pubic bone 63.
(2)尿量の推定及び排尿タイミングの報知
本技術に係る尿量推定装置は、第1のセンサ部及び第2のセンサ部により検出される反射波の情報に基づいて、膀胱内の尿量を推定し、排尿タイミングを知らせることができる。以下、図14を用いて、尿量の推定及び排尿タイミングの報知を行う際の尿量推定システムの動作例について説明する。 (2) Estimation of urine volume and notification of urination timing The urine volume estimation device according to the present technology uses the urine volume in the bladder based on information on reflected waves detected by the first sensor unit and the second sensor unit. Can be estimated and urination timing can be notified. Hereinafter, an operation example of the urine volume estimation system when estimating the urine volume and notifying the urination timing will be described with reference to FIG.
本技術に係る尿量推定装置は、第1のセンサ部及び第2のセンサ部により検出される反射波の情報に基づいて、膀胱内の尿量を推定し、排尿タイミングを知らせることができる。以下、図14を用いて、尿量の推定及び排尿タイミングの報知を行う際の尿量推定システムの動作例について説明する。 (2) Estimation of urine volume and notification of urination timing The urine volume estimation device according to the present technology uses the urine volume in the bladder based on information on reflected waves detected by the first sensor unit and the second sensor unit. Can be estimated and urination timing can be notified. Hereinafter, an operation example of the urine volume estimation system when estimating the urine volume and notifying the urination timing will be described with reference to FIG.
まず、制御部27が超音波の送信指令を出力する(ステップS21)。具体的には、制御部27が、スイッチ23を切り替えながら、第1センサ111、第2センサ112、第3センサ113、第4センサ121に順番に超音波を送受信させる。制御部27は、まず第1センサ111と送信部21及び受信部22とが接続されるようにスイッチ23を制御し、送信部21へパルス信号の生成指令を出力する。送信部21は、生成指令に基づく駆動電圧を第1センサ111に供給し、第1センサ111が、駆動電圧に基づく超音波を送信する。第2センサ112、第3センサ113、第4センサ121についても同様の制御を行う。制御部27は、この生成指令を所定の周期で出力する。
First, the control unit 27 outputs an ultrasonic wave transmission command (step S21). Specifically, the control unit 27 causes the first sensor 111, the second sensor 112, the third sensor 113, and the fourth sensor 121 to transmit and receive ultrasonic waves in order while switching the switch 23. The control unit 27 controls the switch 23 so that the first sensor 111 is connected to the transmission unit 21 and the reception unit 22, and outputs a pulse signal generation command to the transmission unit 21. The transmitting unit 21 supplies a driving voltage based on the generation command to the first sensor 111, and the first sensor 111 transmits an ultrasonic wave based on the driving voltage. The same control is performed for the second sensor 112, the third sensor 113, and the fourth sensor 121. The control unit 27 outputs this generation command at a predetermined cycle.
第1センサ111、第2センサ112、第3センサ113、第4センサ121が超音波を受信する(ステップS22)と、受信部22で各センサからの受信信号の処理が行われる。制御部27は、該受信信号から尿量レベルを判定し、該尿量レベルが閾値以上であるかを判定する(ステップS23)。なお、ステップS23において、通信部25を介して該受信信号の情報を受信したユーザ端末4が尿量レベルを判定してもよい。ここで、「尿量レベル」とは膀胱内の尿量を表す値であり、例えば受信信号に膀胱64からの反射波Wが含まれているセンサの数でありうる。
(4) When the first sensor 111, the second sensor 112, the third sensor 113, and the fourth sensor 121 receive an ultrasonic wave (step S22), the receiving unit 22 processes a signal received from each sensor. The control unit 27 determines a urine volume level from the received signal and determines whether the urine volume level is equal to or higher than a threshold (step S23). Note that, in step S23, the user terminal 4 that has received the information of the received signal via the communication unit 25 may determine the urine volume level. Here, the “urine volume level” is a value representing the urine volume in the bladder, and may be, for example, the number of sensors in which the received signal includes the reflected wave W from the bladder 64.
ここで、膀胱からの反射波の有無と尿量レベルとの関係について図15~図17を用いて説明する。図15~図17は人体の下腹部の模式断面図である。なお、構造は図7~図9と共通するため説明を省略する。
Here, the relationship between the presence or absence of a reflected wave from the bladder and the urine volume level will be described with reference to FIGS. 15 to 17 are schematic sectional views of the lower abdomen of the human body. Note that the structure is common to FIGS. 7 to 9 and will not be described.
図15に示すように、膀胱64内の尿量が少ない場合には、第4センサ121から送信される超音波1211が膀胱64に到達し、第4センサ121において膀胱64からの反射波Wが検出される。一方で、第1センサ111、第2センサ112、第3センサ113から送信される超音波1111、1121、1131は膀胱64に届かず、第1センサ111、第2センサ112、第3センサ113において膀胱64からの反射波Wは検出されない。すなわち、図15において尿量レベルは「1」である。
As shown in FIG. 15, when the amount of urine in the bladder 64 is small, the ultrasonic wave 1211 transmitted from the fourth sensor 121 reaches the bladder 64, and the reflected wave W from the bladder 64 in the fourth sensor 121 is Is detected. On the other hand, the ultrasonic waves 1111, 1121, and 1311 transmitted from the first sensor 111, the second sensor 112, and the third sensor 113 do not reach the bladder 64, and are transmitted to the first sensor 111, the second sensor 112, and the third sensor 113. The reflected wave W from the bladder 64 is not detected. That is, in FIG. 15, the urine volume level is “1”.
図16に示すように、膀胱64内の尿量が増加すると、膀胱64は高さ方向に膨らみ、小腸69を押し上げる。すると、第4センサ121から送信される超音波1211に加えて、第3センサ113から送信される超音波1131も膀胱64に到達し、第3センサ113及び第4センサ121において膀胱64からの反射波Wが検出される。一方で、第1センサ111及び第2センサ112から送信される超音波1111、1121は膀胱64に届かず、第1センサ111及び第2センサ112において膀胱64からの反射波Wは検出されない。すなわち、図16において尿量レベルは「2」である。
As shown in FIG. 16, when the amount of urine in the bladder 64 increases, the bladder 64 expands in the height direction and pushes up the small intestine 69. Then, in addition to the ultrasonic wave 1211 transmitted from the fourth sensor 121, the ultrasonic wave 1131 transmitted from the third sensor 113 also reaches the bladder 64, and is reflected by the third sensor 113 and the fourth sensor 121 from the bladder 64. Wave W is detected. On the other hand, the ultrasonic waves 1111, 1121 transmitted from the first sensor 111 and the second sensor 112 do not reach the bladder 64, and the reflected waves W from the bladder 64 are not detected by the first sensor 111 and the second sensor 112. That is, in FIG. 16, the urine volume level is “2”.
図17に示すように、膀胱64内の尿量がさらに増加すると、膀胱64は高さ方向にさらに膨らみ、小腸69を押し上げる。すると、第1センサ111から第4センサ121までの全てのセンサから送信される超音波1111、1121、1131、1211が膀胱64に到達し、全てのセンサにおいて膀胱64からの反射波Wが検出される。すなわち、図17において尿量レベルは「4」である。
As shown in FIG. 17, when the urine volume in the bladder 64 further increases, the bladder 64 further expands in the height direction and pushes up the small intestine 69. Then, the ultrasonic waves 1111, 1121, 1131, and 1211 transmitted from all the sensors from the first sensor 111 to the fourth sensor 121 reach the bladder 64, and the reflected waves W from the bladder 64 are detected by all the sensors. You. That is, in FIG. 17, the urine volume level is “4”.
このように、膀胱64内の尿量が増加するにつれて尿量レベルが大きくなるため、尿量レベルに基づいて尿量を推定することができる。この尿量レベルの時系列的変化は、記憶部26及び/又はユーザ端末4に記憶される。
As described above, since the urine volume level increases as the urine volume in the bladder 64 increases, the urine volume can be estimated based on the urine volume level. The time-series change in the urine volume level is stored in the storage unit 26 and / or the user terminal 4.
制御部27又はユーザ端末4は、尿量レベルが閾値未満である場合は、尿量が少なく排尿タイミングはしばらくないと判定する。そうすると、制御部27は待機時間を設定する(ステップS26)。そして、前回の超音波の送信から待機時間が経過したか否かを判定する(ステップS27)。待機時間が経過していれば、制御部27は再度超音波の送信指令を出力する(ステップS21)。一方、待機時間が経過していない場合は、制御部27は待機時間が経過するのを待機し、待機時間が経過した後に再度超音波の送信指令を出力する(ステップS21)。このようにして、制御部27は、尿量レベルが閾値に達するまで超音波の送信指令を定期的に行う。
When the urine volume level is less than the threshold value, the control unit 27 or the user terminal 4 determines that the urine volume is small and the urination timing is short. Then, the control unit 27 sets a standby time (step S26). Then, it is determined whether or not the standby time has elapsed since the last transmission of the ultrasonic wave (step S27). If the standby time has elapsed, the control unit 27 outputs an ultrasonic wave transmission command again (step S21). On the other hand, if the standby time has not elapsed, the control unit 27 waits for the standby time to elapse, and outputs an ultrasonic transmission command again after the standby time has elapsed (step S21). In this way, the control unit 27 periodically issues an ultrasonic transmission command until the urine volume level reaches the threshold.
一方、尿量レベルが閾値以上である場合、制御部27又はユーザ端末4は、尿量が限界値以上に達しており排尿タイミングが近いと判定する。そうすると、制御部27は、例えば報知部24を作動させるとともに、通信部25を介してユーザ端末4に排尿タイミングを報知する(ステップS24)。これにより、ユーザ端末4の所持者に排尿タイミングの到来を知らせ、対象者をトイレへ誘導することができる。
On the other hand, when the urine volume level is equal to or higher than the threshold, the control unit 27 or the user terminal 4 determines that the urine volume has reached the threshold value or higher and urination timing is near. Then, the control unit 27 activates, for example, the notification unit 24, and notifies the user terminal 4 of the urination timing via the communication unit 25 (step S24). This allows the user of the user terminal 4 to be notified of the urination timing and to guide the subject to the toilet.
制御部27は、排尿タイミングを報知した後、実際の排尿があった旨の報告を待機する(ステップS25)。対象者又は介護者等は、ユーザ端末4を操作して、実際の排尿があった旨の報告又は排尿があった時刻を入力し、尿量推定装置10に送信する。
After notifying the urination timing, the control unit 27 waits for a report that actual urination has occurred (step S25). The subject, the caregiver, or the like operates the user terminal 4 to input a report indicating that there was actual urination or a time at which urination occurred, and transmit the time to the urine volume estimation device 10.
その後、制御部27は待機時間を設定し(ステップS26)、前回の超音波の送信から待機時間が経過したか否かを判定する(ステップS27)。待機時間が経過していれば、制御部27は再度超音波の送信指令を出力する(ステップS21)。一方、待機時間が経過していない場合は、制御部27は待機時間が経過するのを待機し、待機時間が経過した後に再度超音波の送信指令を出力する(ステップS21)。このようにして、制御部27は、超音波の送信指令を待機時間の間隔で行い、膀胱64内の尿量の推定及び排尿タイミングの報知を定期的に行う。
After that, the control unit 27 sets a standby time (step S26), and determines whether or not the standby time has elapsed since the previous transmission of the ultrasonic wave (step S27). If the standby time has elapsed, the control unit 27 outputs an ultrasonic wave transmission command again (step S21). On the other hand, if the standby time has not elapsed, the control unit 27 waits for the standby time to elapse, and outputs an ultrasonic transmission command again after the standby time has elapsed (step S21). In this way, the control unit 27 issues an ultrasonic transmission command at intervals of the standby time, and periodically estimates the amount of urine in the bladder 64 and notifies the urination timing.
以上のように、本技術に係る尿量推定装置10は、尿量推定用探触子1と本体装置部2とを備え、該探触子1が備える第一のセンサ部11及び第二のセンサ部12を構成する複数のセンサ111、112、113、121により検出される膀胱64からの反射波Wに基づいて、本体装置部2の制御部27が膀胱内の尿量を推定し、排尿タイミングを報知する。すなわち、本技術に係る尿量推定方法は、体内に超音波を送信する工程と、体内からの該超音波の反射波を検出する工程と、該反射波から検出される膀胱からの反射波に基づいて膀胱内の尿量を推定する工程とを含む。また、本技術に係る排尿タイミング報知方法は、上述の尿量推定方法に加えて、膀胱からの反射波を検出したセンサの数が閾値以上であるかを判定する工程と、対象者又は介護者等に排尿タイミングを報知する工程とを含む。
As described above, the urine volume estimation device 10 according to the present technology includes the urine volume estimation probe 1 and the main body device unit 2, and includes the first sensor unit 11 and the second sensor unit 2 included in the probe 1. Based on the reflected waves W from the bladder 64 detected by the plurality of sensors 111, 112, 113, 121 constituting the sensor unit 12, the control unit 27 of the main unit 2 estimates the amount of urine in the bladder and urinates Notify the timing. That is, the urine volume estimation method according to the present technology includes a step of transmitting an ultrasonic wave into the body, a step of detecting a reflected wave of the ultrasonic wave from the body, and a step of detecting a reflected wave from the bladder detected from the reflected wave. Estimating the amount of urine in the bladder based on the information. Further, the urination timing notification method according to the present technology, in addition to the above-described urine volume estimation method, a step of determining whether the number of sensors that have detected reflected waves from the bladder is equal to or greater than a threshold, For notifying the urination timing.
なお、上述した尿量推定装置10の動作例において、制御部27及びユーザ端末4は、膀胱64からの反射波Wが完全にゼロであるかどうかで膀胱64からの反射波Wの有無を判定するのではなく、各センサで検出された膀胱64からの反射波Wの振幅が所定の閾値以上の場合に膀胱64からの反射波Wがあると判定し、膀胱64からの反射波Wの振幅が所定の閾値未満の場合に膀胱64からの反射波Wがないと判定してもよい。
In the operation example of the urine volume estimation device 10 described above, the control unit 27 and the user terminal 4 determine the presence or absence of the reflected wave W from the bladder 64 based on whether the reflected wave W from the bladder 64 is completely zero. Instead, when the amplitude of the reflected wave W from the bladder 64 detected by each sensor is equal to or greater than a predetermined threshold value, it is determined that the reflected wave W from the bladder 64 is present, and the amplitude of the reflected wave W from the bladder 64 is determined. Is smaller than the predetermined threshold, it may be determined that there is no reflected wave W from the bladder 64.
また、制御部27及びユーザ端末4は、膀胱64からの反射波Wが検出されたセンサのうち、膀胱64の高さ方向において最も高い位置に超音波を送信するセンサの反応に従って、該センサよりも低い位置に超音波を送信するセンサが全て反応していると判定してもよい。例えば、図16で第3センサ113において膀胱64からの反射波Wが検出されていれば、第3センサ113及び第4センサ121が反応しているとみなし、尿量レベルを「2」と判定してもよい。また、図17で第1センサ111において膀胱64からの反射波Wが検出されていれば、第1センサ111から第4センサ121までの全てのセンサが反応しているとみなし、尿量レベルを「4」と判定してもよい。
In addition, the control unit 27 and the user terminal 4 send the ultrasonic wave to the highest position in the height direction of the bladder 64 among the sensors in which the reflected wave W from the bladder 64 is detected. Alternatively, it may be determined that all sensors that transmit ultrasonic waves to a lower position are responding. For example, if the reflected wave W from the bladder 64 is detected by the third sensor 113 in FIG. 16, it is considered that the third sensor 113 and the fourth sensor 121 are reacting, and the urine volume level is determined to be “2”. May be. Also, in FIG. 17, if the reflected wave W from the bladder 64 is detected by the first sensor 111, it is considered that all the sensors from the first sensor 111 to the fourth sensor 121 are responding, and the urine volume level is reduced. It may be determined to be “4”.
さらに、膀胱64の前壁と後壁の反射波の時間差から、膀胱64の奥行き方向の大きさの変化も加味して膀胱64内の尿量を推定する構成としてもよい。また、制御部27及びユーザ端末4は、膀胱64からの反射波Wの有無だけでなく、小腸69からの反射波等の有無も加味して尿量を推定する構成であってもよい。
Furthermore, the configuration may be such that the amount of urine in the bladder 64 is estimated from the time difference between the reflected waves of the front wall and the rear wall of the bladder 64 in consideration of the change in the size of the bladder 64 in the depth direction. Further, the control unit 27 and the user terminal 4 may be configured to estimate the urine volume in consideration of not only the presence or absence of the reflected wave W from the bladder 64 but also the presence or absence of a reflected wave from the small intestine 69.
なお、上述した尿量推定システムの動作例において、尿量レベルの閾値はメモリ26に格納された初期値で設定されてもよく、ユーザ端末4で対象者又は介護者等が自由に設定変更できるようにしてもよい。また、排尿タイミングを報知した時間と、実際の排尿があった旨の報告が入力された時間を記憶部26及び/又はユーザ端末4に記憶しておき、サーバ5で機械学習させることによって閾値を自動で設定変更し、新たな閾値を随時メモリ26に上書きできるようにしてもよい。
In the operation example of the urine volume estimation system described above, the threshold of the urine volume level may be set by the initial value stored in the memory 26, and the user or the caregiver can freely change the setting at the user terminal 4. You may do so. Further, the time at which the urination timing is notified and the time at which the report indicating that there was actual urination are input are stored in the storage unit 26 and / or the user terminal 4, and the server 5 performs machine learning to set the threshold. The setting may be automatically changed so that a new threshold can be overwritten in the memory 26 at any time.
また、上述した尿量推定システムの動作例において、待機時間はメモリ26に格納された初期値で設定されてもよく、ユーザ端末4で対象者又は介護者等が自由に設定変更できるようにしてもよい。また、制御部27で推定された膀胱内の尿量に基づいて適宜待機時間を自動で変更するようにし、例えば尿量が多くなるにつれて待機時間が短くなるように設定されてもよい。あるいは、尿量の時系列的変化を記憶部26及び/又はユーザ端末4に記憶しておき、サーバ5で機械学習させることによって待機時間を自動で設定変更し、新たな待機時間を随時メモリ26に上書きできるようにしてもよい。
Further, in the operation example of the urine volume estimation system described above, the standby time may be set by the initial value stored in the memory 26, and the target person or the caregiver can freely change the setting at the user terminal 4. Is also good. Further, the standby time may be automatically changed as appropriate based on the urine volume in the bladder estimated by the control unit 27, and for example, the standby time may be set to be shorter as the urine volume increases. Alternatively, the time-series change of the urine volume is stored in the storage unit 26 and / or the user terminal 4, and the standby time is automatically changed by machine learning in the server 5, and the new standby time is changed as needed in the memory 26. May be overwritten.
(3)その他の実施形態
本技術は、頻尿等の排尿障害を有する患者のトレーニング方法を提供することもできる。膀胱64内に尿があまり溜まっていないのにすぐトイレに行ってしまう癖がある場合には、報知部24又はユーザ端末4で排尿タイミングを報知するまで排尿を我慢させることで、トイレに行く回数を減らす訓練を行うことができる。また、膀胱64内の容量が少なく、すぐに尿意を催してしまう場合には、報知部24又はユーザ端末4で排尿タイミングを報知するまで排尿を我慢させることで、膀胱64の容量を大きくする訓練を行うことができる。 (3) Other embodiments The present technology can also provide a training method for a patient having a dysuria such as pollakisuria. If there is a habit of immediately going to the toilet without much urine being accumulated in thebladder 64, the instructor 24 or the user terminal 4 puts up urination until the urination timing is notified, so that the number of times of going to the toilet is increased. Training can be done to reduce. In addition, when the volume in the bladder 64 is small and urination occurs immediately, training to increase the capacity of the bladder 64 is performed by putting up urination until the notification unit 24 or the user terminal 4 notifies the urination timing. It can be performed.
本技術は、頻尿等の排尿障害を有する患者のトレーニング方法を提供することもできる。膀胱64内に尿があまり溜まっていないのにすぐトイレに行ってしまう癖がある場合には、報知部24又はユーザ端末4で排尿タイミングを報知するまで排尿を我慢させることで、トイレに行く回数を減らす訓練を行うことができる。また、膀胱64内の容量が少なく、すぐに尿意を催してしまう場合には、報知部24又はユーザ端末4で排尿タイミングを報知するまで排尿を我慢させることで、膀胱64の容量を大きくする訓練を行うことができる。 (3) Other embodiments The present technology can also provide a training method for a patient having a dysuria such as pollakisuria. If there is a habit of immediately going to the toilet without much urine being accumulated in the
1 尿量推定用探触子
11 第一のセンサ部
111 第1センサ
112 第2センサ
113 第3センサ
12 第二のセンサ部
121 第4センサ 1 Urinevolume estimation probe 11 First sensor unit 111 First sensor 112 Second sensor 113 Third sensor 12 Second sensor unit 121 Fourth sensor
11 第一のセンサ部
111 第1センサ
112 第2センサ
113 第3センサ
12 第二のセンサ部
121 第4センサ 1 Urine
Claims (8)
- 体内に超音波を送信し、該超音波の反射波を検出する複数のセンサを有する探触子であり、
前記探触子は、第一のセンサ部と、前記第一のセンサ部の下方に配置される第二のセンサ部と、を備え、
前記第一のセンサ部は、前記複数のセンサのうち少なくとも2つのセンサが前記探触子の幅方向に配設された構成を有し、
前記第二のセンサ部は、前記複数のセンサのうち少なくとも1つのセンサが前記第一のセンサ部の下方に配設された構成を有し、
前記第二のセンサ部が、身体に対する前記探触子の装着位置を決定するための位置決め用センサを含む、尿量推定用探触子。 A probe that transmits ultrasonic waves into the body and has a plurality of sensors that detect reflected waves of the ultrasonic waves,
The probe includes a first sensor unit, and a second sensor unit disposed below the first sensor unit,
The first sensor unit has a configuration in which at least two sensors among the plurality of sensors are arranged in a width direction of the probe,
The second sensor unit has a configuration in which at least one of the plurality of sensors is disposed below the first sensor unit,
A urine volume estimation probe, wherein the second sensor unit includes a positioning sensor for determining a mounting position of the probe on a body. - 前記第一のセンサ部を構成する各センサの超音波送信角度がそれぞれ異なる、請求項1に記載の尿量推定用探触子。 The urine volume estimation probe according to claim 1, wherein the ultrasonic transmission angles of the respective sensors constituting the first sensor unit are different from each other.
- 前記第二のセンサ部が、前記センサの配列面に直交する軸に対して下方に向かって超音波を送信する、請求項1又は2に記載の尿量推定用探触子。 The urine volume estimation probe according to claim 1 or 2, wherein the second sensor unit transmits ultrasonic waves downward with respect to an axis orthogonal to an array plane of the sensors.
- 請求項1~3のいずれか一項に記載の尿量推定用探触子と、
該探触子とケーブルにより接続される本体装置部と、を備える尿量推定装置。 A urine volume estimation probe according to any one of claims 1 to 3,
A urine volume estimating apparatus comprising: the probe and a main unit connected by a cable. - 前記ケーブルが、前記探触子の幅方向の側面から延設されている、請求項4に記載の尿量推定装置。 The urine volume estimation device according to claim 4, wherein the cable extends from a side surface in a width direction of the probe.
- 前記本体装置部が、前記位置決め用センサにより検出される反射波の情報に基づいて、膀胱に対する該探触子の位置に係る情報を提示する、請求項4又は5に記載の尿量推定装置。 6. The urine volume estimation device according to claim 4, wherein the main device unit presents information on a position of the probe with respect to the bladder based on information on a reflected wave detected by the positioning sensor. 7.
- 前記本体装置部が、膀胱を基準にして、前記探触子の装着位置を決定する、請求項6に記載の尿量推定装置。 The urine volume estimation device according to claim 6, wherein the main unit determines the mounting position of the probe with reference to the bladder.
- 前記第一のセンサ部及び前記第二のセンサ部により検出される反射波の情報に基づき、膀胱内の尿量を推定する、請求項4~7に記載の尿量推定装置。 The urine volume estimation device according to claim 4, wherein the urine volume in the bladder is estimated based on information on reflected waves detected by the first sensor unit and the second sensor unit.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018125040A JP2021168712A (en) | 2018-06-29 | 2018-06-29 | Urine volume estimation probe and urine volume estimation device using the same |
| JP2018-125040 | 2018-06-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020003874A1 true WO2020003874A1 (en) | 2020-01-02 |
Family
ID=68984742
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/021455 WO2020003874A1 (en) | 2018-06-29 | 2019-05-30 | Probe for estimating urine amount, and device for estimating urine amount using same |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2021168712A (en) |
| WO (1) | WO2020003874A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07171149A (en) * | 1992-10-26 | 1995-07-11 | Agency Of Ind Science & Technol | Urination alarming device with automatically selecting function for radiation angle |
| US5964710A (en) * | 1998-03-13 | 1999-10-12 | Srs Medical, Inc. | System for estimating bladder volume |
| WO2004017834A1 (en) * | 2002-08-09 | 2004-03-04 | Diagnostic Ultrasound Europe B.V. | Instantaneous ultrasonic measurement of bladder volume |
| JP2016043273A (en) * | 2014-08-26 | 2016-04-04 | 大塚メディカルデバイス株式会社 | Ultrasonic urine volume measuring apparatus and method for positioning ultrasonic probe in the same |
| WO2016199182A1 (en) * | 2015-06-12 | 2016-12-15 | トリプル・ダブリュー・ジャパン株式会社 | Urine amount estimation device and urine amount estimation method |
-
2018
- 2018-06-29 JP JP2018125040A patent/JP2021168712A/en active Pending
-
2019
- 2019-05-30 WO PCT/JP2019/021455 patent/WO2020003874A1/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07171149A (en) * | 1992-10-26 | 1995-07-11 | Agency Of Ind Science & Technol | Urination alarming device with automatically selecting function for radiation angle |
| US5964710A (en) * | 1998-03-13 | 1999-10-12 | Srs Medical, Inc. | System for estimating bladder volume |
| WO2004017834A1 (en) * | 2002-08-09 | 2004-03-04 | Diagnostic Ultrasound Europe B.V. | Instantaneous ultrasonic measurement of bladder volume |
| JP2016043273A (en) * | 2014-08-26 | 2016-04-04 | 大塚メディカルデバイス株式会社 | Ultrasonic urine volume measuring apparatus and method for positioning ultrasonic probe in the same |
| WO2016199182A1 (en) * | 2015-06-12 | 2016-12-15 | トリプル・ダブリュー・ジャパン株式会社 | Urine amount estimation device and urine amount estimation method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021168712A (en) | 2021-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107613879B (en) | Urine volume estimation device and urine volume estimation method | |
| KR102223164B1 (en) | Wireless probe and method for power controlling of an wireless probe | |
| US20200163644A1 (en) | Fetal heart rate monitoring system | |
| JP6727203B2 (en) | A wearable ultrasound device that signals changes in the human or animal body | |
| US20180228462A1 (en) | Wearable ultrasound device | |
| JP6088761B2 (en) | Organ measurement device | |
| US20070123778A1 (en) | Bladder measurement | |
| US6579247B1 (en) | Device for monitoring bladder urine distension in patients, and a method thereof | |
| JP6338788B1 (en) | Urination prediction device and urination prediction method | |
| US20180064413A1 (en) | Stool amount estimating apparatus and stool amount estimating method | |
| US20170202503A1 (en) | Bowel movement prediction device and bowel movement prediction method | |
| WO2020003874A1 (en) | Probe for estimating urine amount, and device for estimating urine amount using same | |
| JP2020092812A (en) | Urine amount estimation probe and urine amount estimation apparatus using the same | |
| KR102264756B1 (en) | Wireless probe and method for power controlling of an wireless probe | |
| WO2021206094A1 (en) | Urination prediction system, urination prediction method, and urination prediction program | |
| US12085537B2 (en) | Energy efficient simplified analogue phased array transducer for beam steering | |
| TW201742601A (en) | Body waste quantity estimation device and body waste quantity estimation method comprising an ultrasonic detector for detection a position of a wall of the urinary bladder and an estimation section that estimates the quantity of body waste accumulated in the rectum according to a message supplied from the ultrasonic detector | |
| JPWO2006115278A1 (en) | Organ shape measuring method and measuring apparatus, urination disorder countermeasure system, and ultrasonic probe | |
| JP2022159870A (en) | probe | |
| JP2022159871A (en) | sensor device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19824781 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 32PN | Ep: public notification in the ep bulletin as address of the adressee cannot be established |
Free format text: NOTING OF LOSS OF RIGHTS PURSUANT TO RULE 112(1) EPC (EPO FORM 1205A DATED 31/03/2021) |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19824781 Country of ref document: EP Kind code of ref document: A1 |