WO2019059383A1 - Hydraulic shovel - Google Patents
Hydraulic shovel Download PDFInfo
- Publication number
- WO2019059383A1 WO2019059383A1 PCT/JP2018/035212 JP2018035212W WO2019059383A1 WO 2019059383 A1 WO2019059383 A1 WO 2019059383A1 JP 2018035212 W JP2018035212 W JP 2018035212W WO 2019059383 A1 WO2019059383 A1 WO 2019059383A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- load
- determination
- loading
- hydraulic shovel
- controller
- Prior art date
Links
Images













Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/431—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like
- E02F3/434—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like providing automatic sequences of movements, e.g. automatic dumping or loading, automatic return-to-dig
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2271—Actuators and supports therefor and protection therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/10—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles having fluid weight-sensitive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/14—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing suspended loads
- G01G19/16—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing suspended loads having fluid weight-sensitive devices
Definitions
- the present invention relates to a hydraulic shovel that calculates the loading weight of a work object loaded in a transport machine.
- a working machine represented by a hydraulic shovel, such as dumping of minerals in a mine and loading on a dump truck, dumps (sometimes referred to as "work objects” in this paper) such as dump trucks, etc.
- dumps sometimes referred to as "work objects” in this paper
- work trucks etc.
- the loading amount to the transport machine (total weight of the work objects on the transport machine) can be made appropriate during this kind of work, the drop in production due to lack of loading and the waste of reloading due to overloading To improve on-site production efficiency.
- the general method of adjusting the loading amount to the transport machine is to measure the load of the excavated object while transporting the excavated object while the hydraulic shovel (loading machine) transports the excavated object, and to measure it during the loading operation to the transport machine
- the loading amount to the transport machine is calculated by integrating the calculated load, and the calculated amount is presented to the operator of the hydraulic shovel. Since the loading amount to the transporting machine can be presented, the operator of the hydraulic shovel can adjust the digging amount after the next time, so that the loading amount to the transporting machine can be made appropriate. In addition, the operator of the hydraulic shovel can judge whether or not to be overloaded by loading the excavated material being transported by presenting the loading amount to the transport machine and the load of the excavated material being transported, It becomes possible to prevent overloading in advance.
- Japanese Patent No. 3787046 discloses a load in a bucket during a turning operation for transporting a transported object (object to be worked) to the transporting machine, and releasing the transported object as a transporting machine
- the load difference of the load in the bucket during the turning operation is greater than or equal to a predetermined value and the bucket dump operation is performed in a predetermined angular range in the turning direction, the load in the bucket immediately before the bucket dump operation
- a work load monitoring device for a hydraulic shovel is disclosed which measures and integrates as the weight of the transported object.
- An object of the present invention is to provide a hydraulic shovel capable of detecting the input of a work object to a transport machine without error and accurately outputting the loading amount of the transport machine.
- the present application includes a plurality of means for solving the above problems, and an example thereof is a hydraulic cylinder driven by pressure oil discharged from a hydraulic pump, a work machine driven by the hydraulic cylinder, and
- a hydraulic shovel provided with a controller for calculating the loading weight of a work object loaded in a transport machine by a work machine
- the controller is a work target for the transport machine by the hydraulic shovel based on the posture of the work machine
- a first determination is made to determine whether loading of an object has been performed, and the hydraulic shovel is loaded into the transport machine by the hydraulic shovel based on the thrust of the hydraulic cylinder and the determination result of the first determination.
- the first load which is the load of the work object, is calculated, and the determination result of the first determination and the transport machine side controller provided in the transport machine are transmitted. It is determined whether or not the first load is integrated based on the determination result of the second determination that determines whether loading of the work object onto the transport machine has been performed by the hydraulic shovel A third determination is performed, and when it is determined that the first load is integrated by the third determination, the loading weight of the transport machine is calculated by integrating the first load.
- the present invention it is determined based on the information of both the hydraulic shovel and the transport machine that the loading of the work target has been completed, so that there is no mistake that the hydraulic shovel has input the work target to the transport machine It can be detected and the loading amount to the transport machine can be calculated accurately.
- the side view of the hydraulic shovel concerning the embodiment of the present invention The side view of the dump truck concerning the embodiment of the present invention.
- the flowchart by which the controller 40 by the side of dump truck 2 determines the method of determining whether dump truck 2 is engaged in loading operation. 5 is an example of a graph showing the relationship between the detection value of the vehicle speed sensor 43 and the determination result by the loading operation determination unit 57.
- FIG. 9 is a flowchart showing a method of determining whether or not loading of a work target onto the dump truck 2 by the hydraulic excavator 1 has been performed by the controller 40 on the dump truck 2 side.
- the graph which shows an example of the time change of the detection value of suspension pressure sensor 39a of dump truck 2 engaged in loading work.
- the flowchart which shows the method the controller 21 side of the hydraulic shovel 1 determines whether loading of the operation
- 6 is an example of a graph showing the relationship between the detection value of the arm bottom pressure sensor 31 and the detection value of the bucket angle sensor 26 and the determination result by the conveyance determination unit 51.
- FIG. 6 is a flowchart showing a method of determining whether the load measurement system of the present embodiment is abnormal or not, by the controller 21 on the hydraulic shovel 1 side.
- FIG. 10 is a flowchart of processing executed by the load calculation unit 50, the load integration determination unit 55, and the load integration unit 56 in the controller 21 of the hydraulic shovel 1 side.
- the system configuration figure of the load measuring system concerning other embodiments of the present invention.
- the loading machine to which the present invention is applied is not limited to a hydraulic shovel having a bucket as an attachment, but also includes a hydraulic shovel having grapples, lifting magnets, and the like capable of holding and releasing cargo.
- the present invention is also applicable to a wheel loader or the like provided with a working arm without a turning function such as a hydraulic shovel.
- FIG. 1 is a side view of a hydraulic shovel according to the present embodiment
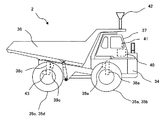
- FIG. 2 is a side view of a dump truck according to the present embodiment.
- the hydraulic shovel 1 shown in FIG. 1 includes a lower traveling body 10, an upper revolving body 11 rotatably provided at an upper portion of the lower traveling body 10, and an articulated work arm mounted in front of the upper revolving body 11.
- a front work machine 12 a swing motor 19 which is a hydraulic motor for rotating the upper swing body 11, an operation room 20 provided on the upper swing body 11 for the operator to get in and operating the shovel 1, and the inside of the operation room 20
- Control lever 22 provided in the control unit 22 for controlling the operation of an actuator mounted on the hydraulic shovel 1, a storage unit (eg, ROM, RAM), an arithmetic processing unit (eg, CPU), and an input / output unit
- a controller 21 that controls the operation of the hydraulic shovel 1.
- the front work machine 12 is provided with a boom 13 rotatably provided on the upper swing body 11, an arm 14 rotatably provided at the tip of the boom 13, and a tip of the arm 14.
- a bucket (attachment) 15 a boom cylinder 16 which is a hydraulic cylinder for driving the boom 13, an arm cylinder 17 which is a hydraulic cylinder for driving the arm 14, and a bucket cylinder 18 which is a hydraulic cylinder for driving the bucket 15 There is.
- the boom cylinder 16, the arm cylinder 17, and the bucket cylinder 18 are driven by pressure oil discharged from a hydraulic pump (not shown) mounted on the upper swing body 11, respectively.
- a boom angle sensor 24, an arm angle sensor 25, and a bucket angle sensor 26 are attached to the pivots of the boom 13, the arm 14 and the bucket 15, respectively.
- the rotation angles of the boom 13, the arm 14 and the bucket 15 can be obtained from the angle sensors 24, 25 and 26, respectively.
- a turning angular velocity sensor 27 and an inclination angle sensor 28 are attached to the upper turning body 11 so that the turning angular velocity of the top turning body 11 and the inclination angle in the front-rear direction of the top turning body 11 can be obtained. There is. From the detection values of the angle sensors 24, 25, 26, 27, 28, the attitude of the front working machine 12 can be specified.
- a boom bottom pressure sensor 29, a boom rod pressure sensor 30, an arm bottom pressure sensor 31, and an arm rod pressure sensor 32 are attached to the boom cylinder 16 and the arm cylinder 17, respectively, so that the pressure inside each hydraulic cylinder can be acquired. It is configured. From the detection values of the pressure sensors 29, 30, 31, 32, it is possible to specify the thrust of each of the cylinders 16, 18, that is, the driving force to be applied to the front working machine 12.
- the boom angle sensor 24, the arm angle sensor 25, the bucket angle sensor 26, the inclination angle sensor 28, and the turning angular velocity sensor 27 can be replaced with other sensors as long as they can detect physical quantities related to the posture of the front work machine 12 is there.
- the boom angle sensor 24, the arm angle sensor 25 and the bucket angle sensor 26 can be replaced by an inclination angle sensor or an inertial measurement unit (IMU), respectively.
- the boom bottom pressure sensor 29, the boom rod pressure sensor 30, the arm bottom pressure sensor 31, and the arm rod pressure sensor 32 relate to the thrust generated by the boom cylinder 16 and the arm cylinder 17, that is, the driving force applied to the front work machine 12.
- Other sensors can be substituted as long as physical quantities can be detected.
- the front work machine 12 can detect the operating speeds of the boom cylinder 16 and the arm cylinder 17 with a stroke sensor, or detect the operating speeds of the boom 13 and the arm 14 with an IMU. The operation of may be detected.
- An external input / output unit 23 for displaying the measurement results of the load measurement system is provided inside the operation room 20, and a wireless communication for the controller 21 to communicate with an external controller (for example, the controller 40) on the upper surface of the upper swing body 11 A transceiver 33 is attached.
- the external input / output unit 23 includes a display unit 23A (see FIG. 3) for displaying the calculation result of the controller 21 and the like, and an input unit 23B (see FIG. 3) for the operator to input information to the controller 21. Is equipped.
- a liquid crystal display can be used as the display device 23A, and a numeric keypad, a touch panel, a keyboard, or the like can be used as the input device 23B.
- the dump truck 2 shown in FIG. 2 includes a vehicle body 34, four tires 35a, 35b, 35c and 35d attached respectively to front and rear axles (not shown) provided on the vehicle body 34, and a load And the operation chamber 37 for the operator to operate the dump truck 2.
- suspensions 38a, 38b, 38c and 38d for supporting the vehicle body 34 are attached to the axle.
- Suspension pressure sensors 39a, 39b, 39c, 39d first vehicle state detectors
- the suspension pressure sensors 39a, 39b, 39c, 39d detect the suspension pressure as a physical quantity related to the weight of the work object loaded on the dump truck 2.
- the vehicle body 34 has a storage device (for example, ROM, RAM), an arithmetic processing unit (for example, CPU) and an input / output device, a controller 40 for controlling the dump truck 2, and an external controller (for example, controller 21). And a display device 41 for displaying the vehicle body information of the dump truck 2 is provided inside the operation room 37. As shown in FIG. As the display device 41, for example, a liquid crystal display can be used. Further, a vehicle speed sensor (third vehicle body state detector) 43 for measuring the traveling speed of the dump truck 2 is provided on the vehicle body 34.
- the suspension pressure sensors 39a, 39b, 39c and 39d can be replaced by other sensors as long as they can detect the physical quantity related to the weight of the work object loaded on the dump truck 2 by the hydraulic shovel 1.
- the vehicle speed sensor 43 may be replaced by another sensor as long as it can detect a physical quantity related to the traveling state of the dump truck 2.
- FIG. 3 and 4 are schematic views showing an example of the operation of the hydraulic shovel 1 during the loading operation.
- the hydraulic shovel 1 of FIG. 3 excavates the work target (excitation target) 3 and loads the work target 4 in the bucket 15 and performs the “digging operation”, and the hydraulic shovel 1 of FIG.
- the “loading operation” is performed to release (release) the work object 4 to the loading platform 36 of the dump truck 2.
- FIG. 5 is a system configuration diagram of the load measuring system according to the present embodiment, and the functions of the controller 40 and the controller 21 are shown by block diagrams.
- the controller 40 on the dump truck 2 side receives the signals of the suspension pressure sensors 39a, 39b, 39c, 39d and the vehicle speed sensor 43, and calculates information (for example, loading determination and loading operation determination described later) based on these signals. It is comprised so that it can transmit to the controller 21 by the side of a shovel via the radio
- the controller 40 loads the work object onto the dump truck 2 by the hydraulic shovel 1 based on the weight of the work object calculated from the detection values output from the suspension pressure sensors 39a, 39b, 39c, 39d (work
- the dump truck 2 is hydraulically operated based on the speed of the dump truck 2 calculated from the detected value output from the loading determination unit 52 that determines whether or not the object has been loaded into the loading platform 36) and the vehicle speed sensor 43
- a loading operation determination unit 57 that determines whether the shovel 1 is engaged in the loading operation of the work object and information via the wireless transceiver 42 (for example, the loading determination unit 52 and the loading operation determination unit It functions as a transmission / reception unit 53 that controls transmission / reception of the judgment result (57).
- the controller 21 of the hydraulic shovel 1 receives the output of the angle sensor 24-28 and the pressure sensor 29-32, the reception signal of the wireless transceiver 33, and the information input from the input device 23B, and calculates based on these Configured to calculate calculated information (for example, the loading amount to the transporting machine 2) and display the information on the display device 23A or to the controller 40 on the dump truck side via the wireless transceiver 33 There is.
- the controller 21 uses the hydraulic shovel 1 based on the detection value of the bucket angle sensor 26 indicating the posture of the front work machine 12 and the detection values of the arm bottom pressure sensor 31 and the arm rod pressure sensor 32 indicating the load on the arm cylinder 17.
- the boom bottom pressure sensor 29 and the boom rod pressure sensor 30 Based on the load calculation unit 50 that calculates the load (first load) of the work object in the bucket 15 related to loading of the work object onto the dump truck 2 by the hydraulic shovel 1 based on the wireless transmitter / receiver 33 Transmission / reception unit 54 that controls transmission and reception of information (for example, determination results of loading determination unit 52 and loading operation determination unit 57);
- An abnormality determination unit 58 that determines the presence or absence of an abnormality of the load measurement system based on determination results of the loading determination unit 52 and the loading operation determination unit 57 and detection values output from the suspension pressure sensors 39a, 39b, 39c
- the load integration determination unit 55 determines whether to integrate the load calculated by the load calculation unit 50 based on the determination results of the transportation determination unit 51 and the loading determination unit 52, and the integration determination unit 55 determines the load. When it is determined that the load (first load) calculated by the calculation unit 50 is to be integrated, the load of the dump truck 2 is calculated by integrating the load, and the load based on the calculation result is output to the display device 23A It functions as the integration unit 56.
- the load measurement system loads the dump truck 2 by integrating the load in the bucket 15 based on the determination results of both the transport determination by the hydraulic shovel 1 and the loading determination by the dump truck 2
- the method of calculating the load will be described with reference to FIGS. 6 to 15.
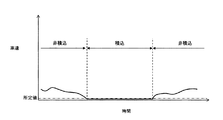
- FIG. 6 is a flowchart showing a method (sixth determination) of a method of determining whether or not the dump truck 2 is engaged in the loading operation by the loading operation determination unit 57 in the controller 40 on the dump truck 2 side.
- 7 is an example of a graph showing the relationship between the detection value of the vehicle speed sensor 43 and the determination result by the loading operation determination unit 57.
- the flowchart of FIG. 6 is executed in the controller 40 of the dump truck 2 every predetermined sampling period.
- step S100 the loading operation determination unit 57 determines whether or not a predetermined time ⁇ tv has elapsed from the start of the flowchart. If it is determined that the predetermined time ⁇ tv has not elapsed, the process returns to the execution of step S100. Subsequently, the elapsed time is monitored in step S100. On the other hand, when it is determined that the predetermined time ⁇ tv has elapsed, the process proceeds to step S101.
- step S101 it is determined whether the loading operation determination is in the non-loading operation.
- loading operation determination “loading operation in progress” indicating that the dump truck 2 is engaged in loading operation with the hydraulic shovel 1 and a state in which the dump truck 2 is not engaged in loading operation
- the default value for loading operation determination (value at the start of the flow in FIG. 6) is assumed to be unloading operation. If it is determined in step S101 that the loading operation determination is in the non-loading operation (in the case of YES), the process moves to step S102. On the contrary, in the loading operation (in the case of NO), the process moves to step S104.
- step S102 it is determined based on the output of the vehicle speed sensor 43 whether the vehicle speed (traveling speed) of the dump truck 2 is equal to or less than a predetermined value.
- the predetermined value in this case is a value capable of determining whether the dump truck 2 is stopped, and can be set to, for example, 1 km / h. If the vehicle speed is equal to or less than the predetermined value, the loading operation determination is set as loading operation in step S103, and then the process moves to step S106. On the other hand, when the vehicle speed exceeds the predetermined value, the process of step S103 is skipped and the process moves to step S106. As shown in FIG. 7, when the vehicle speed reaches a predetermined value or less while the loading operation determination is set to "non-loading operation", the dump truck 2 is stopped for the loading operation. Change the loading operation judgment to "during loading operation".
- step S104 it is determined based on the output of the vehicle speed sensor 43 whether the vehicle speed of the dump truck 2 is equal to or greater than a predetermined value.
- the predetermined value in this case is the same as the predetermined value in step S102, and is a value capable of determining whether the dump truck 2 is stopped. If the vehicle speed is equal to or higher than the predetermined value, the loading operation determination is set as non-loading operation in step S105, and then the process moves to step S106. On the other hand, when the vehicle speed is less than the predetermined value, the process of step S105 is skipped and the process moves to step S106. As shown in FIG. 7, when the vehicle speed reaches a predetermined value or more while the loading operation determination is set to “loading operation”, the dump truck 2 ends the loading operation and starts traveling. Change the loading operation judgment to "non-loading operation".
- step S106 the loading operation determination unit 57 outputs the result of loading operation determination of the dump truck 2 (whether loading operation or non-loading operation) to the transmission / reception unit 53, and the transmission / reception unit 53 It transmits to the hydraulic shovel 1 via the wireless transmitter-receiver 42.
- step S106 the process returns to step S100, and the loading operation determination unit 57 monitors in step S100 whether or not a predetermined time has elapsed from the time of completion of step S106.
- step S102 or step S104 the flowchart may be configured to proceed to step S103 or step S105 and change the loading operation determination only when the vehicle speed satisfying the condition continues for a predetermined time.
- FIG. 8 shows a method (second determination) to determine whether the loading determination unit 52 of the controller 40 on the dump truck 2 side has loaded the work object onto the dump truck 2 by the hydraulic shovel 1 or not.
- FIG. 9 is a flowchart showing an example, and is a graph showing an example of the time change of the detection value of the suspension pressure sensor 39a of the dump truck 2 engaged in the loading operation.
- Each step in FIG. 8 is executed in the controller 40 of the dump truck 2 at a predetermined sampling period.
- step S110 the loading determination unit 52 determines whether or not a predetermined time ⁇ tp has elapsed from the start of the flowchart. If it is determined that the predetermined time ⁇ tp has not elapsed, the process returns to step S110 and continues. The elapsed time is monitored in step S110. On the other hand, when it is determined that the predetermined time ⁇ tp has elapsed, the process proceeds to step S111.
- step S111 pressure values output from the four suspension pressure sensors 39a to 39d are acquired.
- step S112 a difference ⁇ P between the pressure value in step S111 of each of the suspension pressure sensors 39a to 39d and the previous pressure value is calculated, and it is determined whether any one of the four differences is equal to or more than a predetermined value.
- predetermined value is a pressure value acquired in step S111 one control cycle before ( ⁇ tp before) and stored in step S115.
- the predetermined value in this case can be set to a value capable of determining whether or not the work object has been loaded into the loading platform 36 of the dump truck 2, and can be set, for example, as a pressure value that increases with the weight of the work object of half the bucket capacity.
- step S112 when any of the four differences ⁇ Pa- ⁇ Pd is equal to or greater than a predetermined value, it is determined that the work object has been loaded into the loading platform 36, and the process proceeds to step S113. If not, the process proceeds to step S115.
- step S113 the loading determination unit 52 calculates the weight (loading amount) M (second load) of the input work object. Assuming that the inner diameter of each of the suspensions 38a to 38d is Aa-Ad, and the gravitational acceleration is g, the weight M (second load) of the work target is expressed by the following equation (1).
- the loading determination unit 52 determines (loading determination) that loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed in step S114, and transmits and receives
- the unit 53 transmits the determination result (loading determination) and the loading amount M to the controller 21 of the hydraulic shovel 1 via the wireless transceiver 42, and the process proceeds to step S115.
- step S115 the loading determination unit 52 saves each suspension pressure acquired in this step S111 as the previous suspension pressure in the calculation of the next step S112, and the transmitting and receiving unit 53 uses the suspension pressure via the wireless transceiver 42. And sends it to the controller 21 on the hydraulic shovel 1 side. Thereafter, the process returns to the front of step S110, and the loading determination unit 52 stands by again until a predetermined time ⁇ tp elapses.
- FIG. 10 shows a method (first determination) for determining whether or not loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed by the transport determining unit 51 in the controller 21 on the hydraulic shovel 1 side.
- FIG. 11 is a flowchart showing the relationship between the detection value of the arm bottom pressure sensor 31 (arm cylinder bottom pressure) and the detection value of the bucket angle sensor 26 (arm-bucket relative angle) and the determination result by the conveyance determination unit 51. It is an example.
- the flowchart of FIG. 10 is executed in each controller 21 of the hydraulic shovel 1 at predetermined sampling intervals.
- the conveyance determination unit 51 monitors the output of the arm bottom pressure sensor 31 in step S120, and determines whether the threshold 1 has been exceeded from a state lower than the threshold 1 set in advance. Since the hydraulic shovel 1 extrudes the arm cylinder 17 and excavates, as shown in the lower graph of FIG. 11, the arm cylinder bottom pressure increases during the excavating operation, so the arm bottom pressure exceeds the threshold 1 in this embodiment. It is considered that the drilling operation has started at the right timing. When it is determined in step S120 that the arm bottom pressure is lower than the threshold 1 and the threshold 1 is exceeded, the transport determining unit 51 determines that the hydraulic shovel 1 has started the digging operation, and proceeds to step S121. Conversely, if the arm bottom pressure does not exceed the threshold 1 from the state of being lower than the threshold 1 (if the threshold 1 or lower is maintained), the process returns to step S120 and monitoring of the output of the arm bottom pressure sensor 31 is continued.
- step S121 the output of the arm bottom pressure sensor 31 is continuously monitored, and it is determined whether or not the threshold value 2 is exceeded from a state higher than the threshold value 2 set in advance.
- the arm cylinder bottom pressure decreases when the digging operation ends, so in the present embodiment, the digging operation ends at the timing when the arm bottom pressure falls below the threshold 2 and the transport operation starts I consider it to be. If it is determined in step S121 that the arm bottom pressure is higher than the threshold 2 and lower than the threshold 2 in step S121, the conveyance determining unit 51 determines that the hydraulic shovel 1 ends the digging operation and starts the conveyance operation (fourth The determination (part 1) is made, and the process proceeds to step S122.
- the transport determining unit 51 determines that the digging operation continues, and returns to step S121. Then, monitoring of the output of the arm bottom pressure sensor 31 is continued.
- threshold 1 With regard to the relationship between threshold 1 and threshold 2, in the example shown in FIG. 11, the relationship of threshold 1 ⁇ threshold 2 holds, but this is only an example, and the determination of the start and end of the excavation operation of hydraulic excavator 1 Any value can be set as far as possible. At that time, the magnitude relationship between the threshold 1 and the threshold 2 does not matter.
- step S122 the conveyance determination unit 51 outputs the determination that the conveyance operation has started to the outside, and the process proceeds to step S123.
- the load integration determination unit 55 is included in the output destination of the determination at this time.
- step S123 the conveyance determining unit 51 monitors the output of the bucket angle sensor 26, and determines whether the relative angle between the arm and the bucket (the angle formed by the arm 14 and the bucket 15) exceeds a preset threshold 3 or not.
- the hydraulic shovel 1 which completes the transportation operation and starts the loading operation operates to widen the angle between the arm 14 and the bucket 15 in order to discharge the soil (the object to be excavated) in the bucket 15. That is, as shown in the upper graph of FIG. 11, the relative angle between the arm 14 and the bucket 15 becomes large when transitioning from the carrying operation to the loading operation, so in this embodiment the relative angle between the arm 14 and the bucket 15 is the threshold 3 It is considered that the transport operation is finished and the loading operation is started at the timing when it exceeds.
- step S123 If it is determined in step S123 that the arm-bucket relative angle exceeds the threshold 3, the transport determining unit 51 determines that the hydraulic shovel 1 has finished the transport operation and has started the loading operation (the fourth determination ( 2)) and the process proceeds to step S124. Conversely, if it is determined that the arm-bucket relative angle does not exceed the threshold 3 (if the threshold 3 or less is maintained), the transport determining unit 51 determines that the transport operation is continuing, and before step S123 Then, the monitoring of the output of the bucket angle sensor 26 is continued.
- step S124 the transport determination unit 51 outputs a determination that the transport operation has ended (determination that the loading operation has started) to the outside, and returns to step S120.
- the output destination of the determination at this time includes the load integration determination unit 55 and the abnormality determination unit 58.
- FIG. 12 is a flowchart showing a method (fifth determination) of determining the presence or absence of an abnormality of the load measuring system of the present embodiment by the abnormality determining unit 58 in the controller 21 of the hydraulic shovel 1 side.
- the flowchart of FIG. 12 is executed in each controller 21 of the hydraulic shovel 1 at predetermined sampling intervals.
- step S130 the abnormality determination unit 58 first determines whether the loading operation determination received from the dump truck 2 (the result of the loading operation determination transmitted in step S106 of FIG. 6) is set as the loading operation. If it is determined that "loading operation” is set, the process proceeds to step S133, and if "unloading operation” is set, the process proceeds to step S131.
- the abnormality determination unit 58 determines whether or not a predetermined time ⁇ tw has elapsed from the start of the flowchart, and confirms whether there is no reception of the result of the loading operation determination.
- the predetermined time ⁇ tw in this case is a time longer than the execution cycle of the flowchart of FIG. 6 by the loading operation determination unit 57, that is, a time longer than the predetermined time ⁇ tv in step S100 of FIG.
- the value of ⁇ tw is not less than ⁇ tv and not more than twice the value of ⁇ tv. Since the controller 40 of the dump truck 2 transmits the result of the loading operation determination at a constant period ⁇ tv as shown in FIG.
- step S131 If it is determined in step S131 that the predetermined time ⁇ tw has not elapsed, the process returns to step S130, and in step S130, it is monitored again whether or not the result of the loading operation determination has been received. On the other hand, when it is determined that the predetermined time ⁇ tw has elapsed, the process proceeds to step S132.
- step S132 it is determined in the transport determination unit 51 whether or not it is determined that the hydraulic shovel 1 has finished the transport operation.
- the process returns to the front of step S130, and it is monitored again in step S130 whether or not the result of the loading operation determination has been received.
- the process proceeds to step S137, determines that the system has an abnormality, and outputs an abnormality determination.
- step S131 when it is determined in step S131 that the result of the loading operation determination has not been received for the predetermined period ⁇ tw, and it is determined in step S132 that the hydraulic shovel 1 has finished transporting, the hydraulic shovel 1 It can be determined that the loading is in progress but the communication between the two is not established. That is, when it is determined YES in step S132, it can be determined that there is an abnormality in the communication relationship.
- step S132 the start of the loading operation may be determined instead of the end of the transport operation.
- step S130 When the loading operation determination is set to "loading operation" in step S130, the output values of the suspension pressure sensors 39a to 39d transmitted from the controller 40 of the dump truck 2 in step S115 of FIG. 8 are abnormal. It is determined in step S133 whether there is any (fifth determination). Specifically, the average value of the pressure values of the four suspensions is calculated from the output values of the suspension pressure sensors 39a to 39d indicating the weight of the work object loaded in the dump truck 2, and the four pressures relative to the average value Deviations of the values are respectively calculated, and if all the four deviations are within the predetermined value, it is regarded that there is no abnormality in the suspension pressure sensors 39a to 39d, and the process proceeds to step S134.
- the four deviations include one having a predetermined value or more, it is determined that the system has an abnormality.
- one of the suspension pressure sensors 39a to 39d fails, the pressure value is not output normally, and the deviation of the output value from the non-failed sensor increases. Therefore, when it is determined NO in step S133, it can be determined that there is a possibility that the pressure sensors 39a to 39d are broken.
- step S134 the abnormality determination unit 58 determines that loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed (loading determination transmitted in step S114 of FIG. 8). It is determined whether it has been received from the controller 40 or not. If it is determined that the loading determination has been received, the process proceeds to step S135. If not, the process returns to step S130 to monitor again whether or not the loading determination has been received.
- step S135 the load value (first load) of the work object in the bucket 15 output from the load calculation unit 50 in step S146 of FIG. 14 described later and the loading determination unit 52 in step S114 of FIG.
- the output loading amount M (second load) is compared, and it is determined whether or not the deviation (weight deviation) between the two is within a predetermined value. If the weight deviation is within the predetermined value, it is determined in step S136 that the system is normal. On the other hand, when the weight deviation exceeds the predetermined value, it is determined in step S137 that there is an abnormality in the system. As described above, when NO is determined in step S135, it can be determined that there is a possibility that a problem has occurred in either the load calculation unit 50 of the hydraulic shovel 1 or the loading determination unit 52 of the dump truck 2.
- the determination result of the system abnormality based on the flowchart of FIG. 12 is stored in the controller 21 of the hydraulic shovel 1 and is referred to as appropriate by the controller 21 itself, another apparatus, or a computer. Even if the process is determined to be abnormal at step S137, if the process proceeds to step S136 after the dump truck 2 is replaced or the like, the determination result that the system is normal is stored.
- FIG. 13 is an explanatory view of a calculation method of the instantaneous load Ml of the work object in the bucket 15 by the load calculation unit 50 in the controller 21 on the hydraulic shovel 1 side.
- the torque acting around the pivot axis of the boom 13 the torque generated by the boom cylinder 16, the torque generated by the front work machine 12 by gravity and the turning centrifugal force, and the work object by gravity
- the load is calculated using the balance of the torque generated by the rotation centrifugal force.
- the thrust Fcyl of the boom cylinder 16 is calculated by multiplying each of the output signal of the boom bottom pressure sensor 29 and the output signal of the boom rod pressure sensor 30 by the pressure receiving area of the boom cylinder 16 and calculating the difference between them.
- the torque Tbm generated by the boom cylinder 16 is Lbm
- the direction of the thrust Fcyl of the boom cylinder 16, the line segment Lbm, and the thrust direction is the length of a line connecting the boom rotation shaft and the application point of the thrust Fcyl of the boom cylinder 16. It is calculated by the following equation (2) as the formed angle ⁇ bmcyl.
- Tbm Fcyl Lbm sin ( ⁇ bmcyl) (2)
- the torque Tgfr generated by gravity of the front working machine 12 is Mfr
- the gravity acceleration of the front working machine 12 is g
- the length of the boom rotation axis and the front gravity center is Lfr
- Tgfr Mfr ⁇ g ⁇ Lfr (3)
- the torque Tcfr generated by the front working machine 12 by the turning centrifugal force is calculated by the following equation (4), where the turning angular velocity is ⁇ , and the angle formed by the line connecting the boom rotation axis and the front center of gravity and the horizontal plane is ⁇ fr.
- Tcfr Mfr ⁇ Lfr ⁇ ⁇ 2 ⁇ sin ( ⁇ fr) (4) Mfr, Lfr and ⁇ fr are output from the position of the center of gravity and weight of boom 13, arm 14 and bucket 15 set in advance, and from boom angle sensor 24, arm angle sensor 25, bucket angle sensor 26 and inclination angle sensor 28 It is calculated from the angle signal to be
- the torque Tgl generated by gravity of the work object is calculated by the following equation (5), where the instantaneous load of the work object is Ml and the length of the boom rotation axis and the bucket center of gravity is Ll.
- Tgl Ml ⁇ g ⁇ Ll (5)
- the torque Tcl generated by the work object by the turning centrifugal force is calculated by the following equation (6), where the angle formed by the line connecting the boom rotation axis and the center of gravity of the work object and the horizontal plane is ⁇ l.
- FIG. 14 is a flowchart of processing executed by the load calculation unit 50, the load integration determination unit 55, and the load integration unit 56 in the controller 21 of the hydraulic excavator 1 side.
- the load calculation unit 50 determines the load (first load) of the work object in the bucket being transported
- the load integration determination unit 55 determines the load (first load).
- a method of outputting the load weight by determining whether or not to integrate (third determination) and integrating the load by the load integration unit 56 will be described.
- the flowchart of FIG. 14 is executed at a predetermined sampling cycle in the controller 21 on the hydraulic shovel 1 side.
- step S140 the load integration unit 56 determines whether or not the setting of the loading operation determination output from the dump truck 2 at a constant cycle ⁇ tv in step S106 of FIG. 6 has been switched. If it is determined that there is no switch in the loading operation determination, the process proceeds to step S142. If it is determined that the switch is performed, the load weight of the dump truck 2 is reset in step S141, and the process proceeds to step S142. By resetting the loading weight at the timing when the loading operation is switched to the non-loading operation, the load of the work object can be integrated only during the loading operation of the dump truck 2.
- step S142 the load calculation unit 50 monitors whether or not the conveyance determination unit 51 has output a start determination of the conveyance operation. If the start determination of the transport operation is output, the process proceeds to step S143. If not, the process returns to step S140 to monitor the output of the loading operation determination unit 57 (setting of the loading operation determination).
- step S143 the load calculation unit 50 calculates the instantaneous load Ml of the work object by performing calculations according to equations (2) to (8), and in step S144, records the instantaneous load Ml in the controller 21 and step S145. Go to
- step S145 the load calculation unit 50 determines whether or not a predetermined time has elapsed from the time of output of the start determination of the transportation operation (when YES is determined in step S142). If it is determined that the predetermined time has not elapsed, the process returns to the front of step S143, and steps S143 and S144 are executed again. By repeating steps S143 and S144 for a predetermined time, a plurality of instantaneous loads M1 calculated within the predetermined time can be recorded. On the other hand, if it is determined that the predetermined time has elapsed, the process proceeds to step S146. In step S146, the load calculation unit 50 calculates an average load of the plurality of instantaneous loads M1 recorded within the predetermined time, and the average load is used as a load value (first load) of the work object, and the process proceeds to step S147.
- step S147 the load integration availability determination unit 55 monitors whether or not the conveyance determination unit 51 has output a determination on the end of the conveyance operation. If it is determined that the transport operation end determination is not output, the process returns to the front of step S147, and monitoring of the transport operation end determination is continued. On the other hand, when it is determined that the transport operation end determination is output, it is considered that the loading operation by the hydraulic shovel 1 has started, and the process proceeds to step 148. In step S147, instead of the determination of the end of the transport operation, the determination of the start of the loading operation may be monitored.
- step S148 the load integration determination unit 55 determines whether the abnormality determination unit 58 determines that an abnormality has been made. That is, the determination is performed with reference to the result of the abnormality determination stored in the controller 21.
- the process proceeds to step S149, and if the abnormality determination is performed (that is, the abnormality determination is stored), the process proceeds to step S151.
- step S149 the load accumulation determination unit 55 determines that loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed (loading determination transmitted in step S114 of FIG. 8). It is determined whether or not it has been received from the controller 40 of If it is determined that the loading determination has been received, the load integration unit 56 integrates the average load calculated in step S145 into the previous load weight (integrated load) in step S154, and the process proceeds to step S155. On the other hand, if it is determined in step S149 that no loading determination has been received, the process proceeds to step S150.
- step S150 the load integration availability determination unit 55 determines whether or not a predetermined time ⁇ T has elapsed from the determination of the end of the transport operation in step S147.
- a predetermined time ⁇ T (1) from the time required for the loading operation of the hydraulic shovel 1 to (2) from the time required for a series of operations consisting of digging, carrying, loading and reaching during the loading operation of the hydraulic shovel 1 You can set any time between them.
- the predetermined time ⁇ T may be input and determined by the operator via the input device 23B in accordance with the tendency of the required time of each operator regarding the loading operation. If it is determined in step S150 that the predetermined time ⁇ T has not elapsed, the process returns to step S148 to monitor abnormality determination and loading determination again.
- step S155 As a specific example in the case of proceeding from step S150 to step S155, although the hydraulic shovel 1 dumps the bucket 15, there is no loading platform 36 for the dump truck 2 therebelow, and the work object to the dump truck 2 There are cases where loading has failed.
- the load integration possibility determination unit 55 inquires the operator of the necessity for integration along with a warning display notifying the operator that the load can not be automatically integrated due to a system abnormality in step S151.
- the display unit 23A is instructed to output an inquiry display to be displayed, whereby a warning display and an inquiry display are displayed on the display unit 23A (for the inquiry display, refer to the inquiry display portion 81 in FIG. 15 described later).
- an instruction of integration required is input through the input device 23B.
- the load integration availability determination unit 55 determines whether or not an instruction requiring integration (which may be referred to as “integration instruction” in this document) is input from the operator via the input device 23B.
- integration instruction an instruction requiring integration
- the load integration unit 56 integrates the average load calculated in step S145 into the load weight (accumulated load) obtained so far (step S154), and proceeds to step S155.
- the process proceeds to step S153, and it is determined whether a predetermined time has elapsed from the warning output of step S151.
- step S153 If it is determined in step S153 that the predetermined time has not elapsed, the process returns to step S152 to monitor again the presence or absence of the input of the integration instruction. On the other hand, when it is determined that the predetermined time has elapsed, the process skips step S154 and proceeds to step S155.
- step S155 the load calculation unit 50 resets the average load calculated in step S146 and returns to the step before step S140.
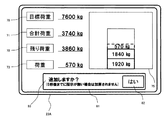
- FIG. 15 is an external view of a display screen (output screen) of the display device 23A.
- the display method of the load measurement result in the load measurement system of this embodiment and the method of integration execution instruction when there is an abnormality in the system will be described using FIG.
- the display device 23A is configured by a touch panel, and the display screen of the display device 23A displays a target load display unit 70 that displays the target loading weight (target load value) of the dump truck 2, and the bucket calculated in S146 of FIG.
- Internal load value display unit 72 for displaying the load value (average load value of instantaneous load Ml) of the work object in 15 and the integrated value of the load value of the work object in the bucket 15 calculated in step S154 (dump Of the total load display section 71 displaying the integrated weight of the truck 2), the value displayed on the target load display section 70 (target load weight), and the value displayed on the total load display section 71 (integrated value of load values)
- Remaining load display unit 72 for displaying the difference
- integration bar display unit 75 for displaying the accumulated load value history of the work object as a numerical value and a vertical bar graph (integration bar)
- step S15 Display of the query is a query display section 81 displayed.
- the value of the in-bucket load display unit 72 is updated to the latest value calculated in step S146 of FIG. 14 and is updated to 0 when reset in step S155.
- the value of the total load display unit 71 and the display of the integration bar display unit 75 are updated to the latest values when step S154 is performed, and are updated to 0 when reset in step S141.
- the inquiry display unit 81 displays an inquiry display 83 inquiring of the operator whether or not the loading is necessary in step S151.
- an integration instruction input unit 82 which is a button pressed when the operator desires integration, is displayed together with the inquiry display 83.
- the load integration determination unit 55 determines in step S152 that the integration instruction has been input.
- the integration instruction input unit 82 is not pressed, the integration in step S154 is not performed. In the example of FIG. 15, the remaining time (5 seconds in FIG.
- step 15 from the timing at which the warning display is output in step S151 to the elapse of the predetermined time in step S153 is referred to It is configured to display on the display unit 81, and when the remaining time reaches zero (ie, when the predetermined time in step S153 has elapsed), the display in the inquiry display unit 81 disappears.
- the loading operation determination unit 57 of the controller 40 determines the loading operation. It changes during the loading operation from the non-loading operation (FIG. 6: steps S102, S103) and transmits the result to the controller 21 of the hydraulic shovel 1 (FIG. 6: step S106).
- the controller 21 of the hydraulic shovel 1 having received the loading work judgment result recognizes that the loading work judgment result has been switched, resets the loading weight (FIG. 14: steps S140 and 141), and the hydraulic shovel 1 carries out the transport operation. Monitoring of whether or not to start is started (FIG. 14: step 142).
- the load associated with the digging causes the bottom pressure of the arm cylinder 17 to exceed the threshold 1 and then the digging operation is completed and the load is reduced.
- the bottom pressure is below threshold 2.
- the conveyance determination unit 51 of the controller 21 outputs a determination indicating that the hydraulic shovel 1 has started the conveyance operation (FIG. 10: step S122).
- the load integration unit 56 of the controller 21 repeatedly calculates and records the instantaneous load Ml of the work object in the bucket 15 for a predetermined time, and the predetermined time
- the average load value of the instantaneous load Ml calculated in is taken as the load value of the work object (FIG. 14: steps S143-146). That is, the calculation of the load value of the work object is performed during the transportation operation of the hydraulic shovel 1.
- the hydraulic shovel 1 having moved the bucket 15 to the upper side of the loading platform of the dump truck 2 by the transporting operation starts the dumping operation of the bucket 15 to start the loading operation.
- the arm-bucket relative angle exceeds the threshold value 3
- the conveyance determination unit 51 of the controller 21 outputs a determination indicating that the hydraulic shovel 1 has completed the conveyance operation (FIG. 10: step S124).
- the fact that the transport determination unit 51 outputs the end determination of the transport operation in this way indicates that the hydraulic shovel 1 has started the loading operation, and the hydraulic shovel 1 will soon be the work object on the loading platform 36 of the dump truck 2 Indicates that it will be injected.
- the controller 21 of the hydraulic shovel 1 receives the loading determination input from the controller 40 of the dump truck 2 using the output of the transport operation determination from the transport determining unit 51 as a trigger when the determination result by the abnormality determining unit 58 is normal determination. It is started to monitor whether or not it is received (FIG. 14: step S149).
- the controller 40 Sends a loading determination to the controller 21 of the hydraulic shovel 1 (FIG. 8: step S114).
- the controller 21 When the controller 21 confirms the reception of the loading determination from the dump truck 2, the controller 21 integrates the average load value of the instantaneous load Ml calculated above to calculate the loading weight of the dump truck 2.
- the loading weight at the first loading is the average load value.
- the calculation result of the load weight is displayed on the total load display section 71 of the display device 23A of the hydraulic shovel 1 (FIG. 15). Also in the second and subsequent loading operations, if loading from the hydraulic shovel 1 to the dump truck 2 is normally performed, the same processing as described above is repeated, and the load value of the work object calculated by the load calculation unit 50 is It is integrated to the load weight.
- the transport determination unit Even if the predetermined time ⁇ T has elapsed since the determination of the end of the transport operation from 51, the loading determination is not transmitted from the controller 40 of the dump truck 2.
- the controller 21 of the hydraulic shovel 1 carries out the loading operation of the hydraulic shovel 1, but considers that loading on the dump truck 2 has failed for some reason, and the load of the work object associated with the loading operation this time The integration of the values is canceled, the load value of the work object calculated during the transport operation is reset, and it is waited until the next start judgment of the transport operation is output.
- step S137 abnormality determination unit 58 of the controller 21 of the hydraulic excavator 1
- the flow until the end of the carrying operation of the hydraulic shovel 1 is the same as in the case of normality determination, so the description will be omitted.
- abnormality judgment unit 58 When the judgment result by the controller 21 (abnormality judgment unit 58) of the hydraulic shovel 1 is abnormality judgment, communication abnormality between the two controllers 21, 40, abnormality of the suspension pressure sensor 39 of the dump truck 2, or calculation abnormality of the load value there is a possibility.
- a warning display and an inquiry display 83 are output to the display device 23A (FIG. 14: step S151).
- the operator of the hydraulic shovel 1 can be made aware that a system abnormality has occurred and the integrated value of the load value of the work object can not be calculated automatically.
- the integration instruction input unit 82 is displayed on the display device 23A together with the inquiry display 83.
- the operator of the hydraulic shovel 1 inputs an integration instruction to the controller 21 via the integration instruction input unit 82.
- the controller 21 integrates the average load value of the instantaneous load Ml previously calculated in the same manner as in the case of the normality determination to calculate the loading weight of the dump truck 2.
- the load weight can be calculated.
- each of the controller 40 (loading determination unit 52) of the dump truck 2 and the controller 21 (transport determining unit 51) of the hydraulic shovel 1 It is determined whether the loading has been performed, and the controller 21 (load integration availability determination unit 55) of the hydraulic shovel 1 determines the availability of integration of the load value of the work object in the bucket based on both determination results.
- the controller 21 (load integration unit 56) of the hydraulic excavator 1 integrates the load value based on the determination result.
- the load value integration instruction is manually made only in the case of the system abnormality. You can reduce the operation burden of In addition, with this configuration, integration of load values can be continued even when an abnormality occurs.
- the present invention is not limited to the above-described embodiment, and includes various modifications within the scope of the present invention.
- the present invention is not limited to the one provided with all the configurations described in the above embodiment, but also includes one in which a part of the configuration is deleted.
- part of the configuration according to one embodiment can be added to or replaced with the configuration according to another embodiment.
- the determination method of the loading operation of the dump truck 2 is not limited to the method shown in FIG. 6 and FIG. FIG. 16 and FIG. 17 are explanatory views of a system that performs the loading work determination method of the dump truck 2 different from the above embodiment.
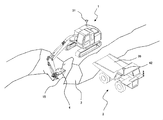
- FIG. 16 shows the system configuration of the load measuring system
- FIG. 17 is an explanatory view of the method of determining the loading operation of the dump truck 2 by the system of FIG.
- the dump truck 2 includes a GPS antenna 38.
- the controller 40 includes a transport machine position calculation unit 66 that calculates the absolute position of the dump truck 2 based on an input signal from the GPS antenna 38.
- the vehicle position calculated by the transport machine position calculation unit 66 is configured to be transmitted.
- the hydraulic shovel 1 also has a GPS antenna 38, and the controller 21 has a loading machine position calculation unit 65 for calculating the absolute position of the hydraulic shovel 1 based on an input signal from the GPS antenna 38, and loading machine position calculation
- the loading work determination unit 57 that determines the loading work state of the dump truck 2 based on the position information (relative distance) of the hydraulic shovel 1 and the dump truck 2 input from the unit 65 and the transport machine position calculation unit 66 is provided.
- the loading operation determination unit 57 sets the loading operation determination as loading operation when it is determined that the dump truck 2 is present at a position within a predetermined distance indicated by a broken line from the hydraulic shovel 1 as shown in FIG. If it is determined that the dump truck 2 is present at a position separated from the predetermined distance, the loading operation determination is set as non-loading operation. Even if the system is configured as described above, the same effect as that of the above embodiment can be exhibited.
- step S150 when YES is determined in step S150, the process may be configured to proceed to step S151 instead of proceeding to step S155.
- the process after step S151 in this case is as shown in FIG. If YES is determined in step S150, it is considered that the loading on the dump truck 2 has failed. Therefore, by displaying the warning display and the inquiry display on the display device 23A, the operator is prompted to input the accumulation instruction after the hydraulic shovel 1 performs the loading again. According to this configuration, the operator can recognize that the integration is interrupted due to the loading failure, and return to the state where the automatic integration before the loading failure can be triggered by the integration instruction. can do.
- step S 151 of FIG. 14 in the present embodiment, when abnormality determination is performed, it has been described that warning display and inquiry display 83 are performed on the display device 23A regardless of the cause. There is a possibility that the load value of the work object has an error if there is an abnormality in (in particular, it is determined as NO in step S135 of FIG. 12). Therefore, in this case, the system may be configured to perform only the abnormality display without performing the inquiry display 83, and may prevent the erroneous load value from being integrated by the operator's integration instruction.
- the abnormality determination unit 58 is provided in the controller 21 of the hydraulic excavator 1 in the above embodiment, this can be omitted.
- the process proceeds to step S149 when YES is determined in step S148 of the flowchart of FIG. 14, and the process is returned to step S149 when NO is determined in step S150. Just do it.
- the configuration of the load measurement system of the present invention is not limited to that shown in FIG.
- the loading determination unit 52 does not have to be mounted in the controller 40 of the dump truck 2 and inputs signals of the suspension pressure sensors 39a to 39d to the transmitting and receiving unit 53 to directly transmit the hydraulic excavator 1 from the wireless transceiver 42
- the controller 21 of the hydraulic shovel 1 may execute the processing corresponding to the arithmetic processing performed by the loading determination unit 52 by transmitting the information.
- the calculation of the instantaneous load Ml is not limited to the model shown in FIG. 13, and an arithmetic expression different from that described above may be used.
- the instantaneous load may be calculated using the equation of motion of the front working unit 12 configured by the boom 13, the arm 14, and the bucket 15.
- the method of calculating the load value of the work object is not limited to the method shown in FIG.
- the period during which the load is averaged may be determined using the magnitude of the turning angular velocity or the position of the bucket 15.
- the loading determination of the dump truck 2 is not limited to the contents shown in FIGS. 8 and 9.
- an acceleration sensor is attached to the vessel 36 or the vehicle body, and a change in acceleration in the vertical direction that occurs when the work object is thrown into the vessel 36 is detected by the acceleration sensor to output a loading determination. It is also good.
- the display content of the display device 23A is not limited to FIG.
- the ratio of the integrated load to the dump truck capacity may be displayed as a percentage, or a portion may be provided on the display screen in which the history of the past loading amount (loading weight) is arranged and displayed.
- the components of the controller 40 and the controller 21 and the functions and execution processes of the components are realized by hardware (for example, designing logic for executing each function by an integrated circuit). You may. Further, the configuration according to the controllers 40 and 21 may be a program (software) in which each function according to the configuration of the controllers 40 and 21 is realized by being read and executed by an arithmetic processing unit (for example, a CPU). .
- the information related to the program can be stored, for example, in a semiconductor memory (flash memory, SSD, etc.), a magnetic storage device (hard disk drive, etc.), a recording medium (magnetic disk, optical disc, etc.), and the like.
- Carrier bed 38 ... Suspension, 39 ... Suspension pressure sensor, 40 ... controller (transporter side controller), 41 ... display device, 42 ... wireless transmission Receiver, 43: Vehicle speed sensor, 50: Load calculation unit, 51: Transport determination unit, 52: Load determination unit, 53: Transmission and reception unit, 54: Transmission and reception unit, 55: Load integration availability determination unit, 56: Load integration unit , 57 ... loading operation determination unit, 58 ... abnormality determination unit, 70 ... target load display unit, 71 ... total load display unit, 72 ... load display unit, 81 ... inquiry display unit, 82 ... integration instruction input unit, 83 ... Display inquiry
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Component Parts Of Construction Machinery (AREA)
Abstract
A hydraulic shovel (1) comprises a controller (21) that: performs a first determination for determining, on the basis of the posture of a working machine (12), whether a work object has been loaded by the hydraulic shovel onto a dump truck (2); calculates a first load, which is a load of the work object that was loaded by the hydraulic shovel onto the dump truck, on the basis of the thrust of a boom cylinder (16) and the determination result of the first determination; performs a third determination for determining whether to integrate the first load on the basis of the determination result of a second determination, which is for determining whether a work object has been loaded by the hydraulic shovel onto the dump truck and which was transmitted from a controller (40) of the dump truck, and the determination result of the first determination; and, if it was determined in the third determination that the first load is to be integrated, calculates a load weight of the dump truck by integrating the first load.
Description
本発明は,運搬機械に積み込まれた作業対象物の積載重量を演算する油圧ショベルに関する。
The present invention relates to a hydraulic shovel that calculates the loading weight of a work object loaded in a transport machine.
一般に,油圧ショベルに代表される作業機械は,例えば鉱山における鉱物の掘削とダンプトラックへの積込のように,掘削物(本稿では「作業対象物」と称することがある)をダンプトラック等の運搬機械に積込む作業(積込作業)を行うことがある。
In general, a working machine represented by a hydraulic shovel, such as dumping of minerals in a mine and loading on a dump truck, dumps (sometimes referred to as "work objects" in this paper) such as dump trucks, etc. We may carry out work (loading work) to load to conveyance machine.
このような作業のとき,運搬機械への積込量(運搬機械上の作業対象物の総重量)を適量にすることができれば,積込不足による生産量の低下や過積載による積直しの無駄を削減し,現場の生産効率を向上することができる。
If the loading amount to the transport machine (total weight of the work objects on the transport machine) can be made appropriate during this kind of work, the drop in production due to lack of loading and the waste of reloading due to overloading To improve on-site production efficiency.
運搬機械への積込量を適量にする一般的な方法は,油圧ショベル(積込機械)が掘削物の運搬中に掘削物の荷重を計測すると共に,運搬機械への積込作業中に計測した荷重を積算することで運搬機械への積込量を演算し,それを油圧ショベルの操作者に提示することである。運搬機械への積込量が提示されることで油圧ショベルの操作者は次回以降の掘削量を調整できるので,運搬機械への積込量を適量にすることが可能となる。また,運搬機械への積込量と運搬中の掘削物の荷重が提示されることで油圧ショベルの操作者は,運搬中の掘削物を積込むことによって過積載となるか否か判断でき,過積載を未然に防ぐことが可能となる。
The general method of adjusting the loading amount to the transport machine is to measure the load of the excavated object while transporting the excavated object while the hydraulic shovel (loading machine) transports the excavated object, and to measure it during the loading operation to the transport machine The loading amount to the transport machine is calculated by integrating the calculated load, and the calculated amount is presented to the operator of the hydraulic shovel. Since the loading amount to the transporting machine can be presented, the operator of the hydraulic shovel can adjust the digging amount after the next time, so that the loading amount to the transporting machine can be made appropriate. In addition, the operator of the hydraulic shovel can judge whether or not to be overloaded by loading the excavated material being transported by presenting the loading amount to the transport machine and the load of the excavated material being transported, It becomes possible to prevent overloading in advance.
運搬機械への積込量を計測する装置として,特許第3787046号公報には,運搬物(作業対象物)を運搬機械に運搬する旋回操作中のバケット内荷重と運搬物を運搬機械に放土した後の旋回操作中のバケット内荷重の荷重差が所定値以上であって,旋回方向の所定の角度範囲でバケットダンプ操作が実施された場合,そのバケットダンプ操作直前のバケット内荷重を運搬機械への運搬物重量として計測および積算する油圧ショベルの作業量モニタ装置が開示されている。
As a device for measuring the loading amount to a transporting machine, Japanese Patent No. 3787046 discloses a load in a bucket during a turning operation for transporting a transported object (object to be worked) to the transporting machine, and releasing the transported object as a transporting machine When the load difference of the load in the bucket during the turning operation is greater than or equal to a predetermined value and the bucket dump operation is performed in a predetermined angular range in the turning direction, the load in the bucket immediately before the bucket dump operation A work load monitoring device for a hydraulic shovel is disclosed which measures and integrates as the weight of the transported object.
特許第3787046号公報の油圧ショベルの作業量モニタ装置では,旋回角度とバケットダンプ操作という油圧ショベル側の情報のみに基づいて運搬機械への積み込み(放土)の有無を判定しているので,実際に運搬機械に作業対象物が積み込まれたか否かを正確に判定することは難しい。例えば,所定の旋回角度範囲において積込以外の作業でバケットダンプ操作が発生した場合には,それをトリガーにして作業対象物の重量を誤って計測・積算してしまう可能性がある。また,ダンプトラックが所定の角度範囲外に移動した後に,当該所定の角度範囲内で誤ってバケットダンプ操作をしてしまった場合にはダンプトラックへの作業対象物の積み込みは失敗してしまう。しかし,上記文献の技術ではこの場合にも作業対象物の重量を計測・積算してしまうことになる。
In the work load monitoring device for a hydraulic shovel disclosed in Japanese Patent No. 3787046, whether or not loading (unloading) onto a transport machine is determined based only on the information on the hydraulic shovel side such as the turning angle and the bucket dump operation It is difficult to accurately determine whether or not the work object has been loaded into the transport machine. For example, when a bucket dump operation occurs in an operation other than loading in a predetermined turning angle range, there is a possibility that the weight of the work object may be erroneously measured and integrated by using it as a trigger. Also, if the bucket dump operation is accidentally performed within the predetermined angle range after the dump truck has moved out of the predetermined angle range, loading of the work object onto the dump truck will fail. However, in the technique of the above document, the weight of the work object is also measured and integrated in this case.
本発明は,運搬機械への作業対象物の投入を誤りなく検出し,運搬機械への積込量を正確に出力できる油圧ショベルの提供を目的とする。
An object of the present invention is to provide a hydraulic shovel capable of detecting the input of a work object to a transport machine without error and accurately outputting the loading amount of the transport machine.
本願は上記課題を解決する手段を複数含んでいるが,その一例を挙げるならば,油圧ポンプから吐出される圧油によって駆動される油圧シリンダと,前記油圧シリンダによって駆動される作業機と,前記作業機により運搬機械に積み込まれた作業対象物の積載重量を演算するコントローラとを備えた油圧ショベルにおいて,前記コントローラは,前記作業機の姿勢に基づいて前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたか否かを判定する第1の判定を行い,前記油圧シリンダの推力と前記第1の判定の判定結果とに基づいて前記油圧ショベルにより前記運搬機械へ積込まれた作業対象物の荷重である第1の荷重を演算し,前記第1の判定の判定結果と前記運搬機械に備えられた運搬機械側コントローラから送信された前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたか否かを判定する第2の判定の判定結果とに基づいて前記第1の荷重を積算するか否かを判定する第3の判定を行い,前記第3の判定により前記第1の荷重を積算すると判定された場合に前記第1の荷重を積算することで前記運搬機械の積載重量を演算するものとする。
The present application includes a plurality of means for solving the above problems, and an example thereof is a hydraulic cylinder driven by pressure oil discharged from a hydraulic pump, a work machine driven by the hydraulic cylinder, and In a hydraulic shovel provided with a controller for calculating the loading weight of a work object loaded in a transport machine by a work machine, the controller is a work target for the transport machine by the hydraulic shovel based on the posture of the work machine A first determination is made to determine whether loading of an object has been performed, and the hydraulic shovel is loaded into the transport machine by the hydraulic shovel based on the thrust of the hydraulic cylinder and the determination result of the first determination. The first load, which is the load of the work object, is calculated, and the determination result of the first determination and the transport machine side controller provided in the transport machine are transmitted. It is determined whether or not the first load is integrated based on the determination result of the second determination that determines whether loading of the work object onto the transport machine has been performed by the hydraulic shovel A third determination is performed, and when it is determined that the first load is integrated by the third determination, the loading weight of the transport machine is calculated by integrating the first load.
本発明によれば,油圧ショベルと運搬機械の双方の情報に基づいて作業対象物の積み込みが完了したことを判定されるので,油圧ショベルから運搬機械に作業対象物が投入されたことが誤りなく検出され,運搬機械への積込量を正確に算出できる。
According to the present invention, it is determined based on the information of both the hydraulic shovel and the transport machine that the loading of the work target has been completed, so that there is no mistake that the hydraulic shovel has input the work target to the transport machine It can be detected and the loading amount to the transport machine can be calculated accurately.
以下,本発明の実施の形態について図面を用いて説明する。以下では,作業機械の荷重計測システムを構成する積込機械として油圧ショベルを,運搬機械としてダンプトラックを利用する場合について説明する。
Hereinafter, embodiments of the present invention will be described using the drawings. Below, the case where a hydraulic shovel is used as a loading machine which comprises the load measurement system of a working machine, and a dump truck as a conveyance machine is demonstrated.
また,本稿では便宜上,油圧ショベル(積込機械)によるダンプトラック(運搬機械)への「積込作業(運搬作業)」を,A)作業対象物(運搬物)を掘削してバケット内に作業対象物を積み込む「掘削動作」(図3参照)と,B)上部旋回体の旋回とフロント作業機の動作を組み合わせてダンプトラックの荷台の上までバケットを移動する「運搬動作」と,C)バケット内の作業対象物をダンプトラックの荷台に放出(放土)する「積込動作」(図4参照)と,D)掘削動作を開始するために作業対象物上の所望の位置へバケットを移動させる「リーチング動作」という4つの動作を含む作業と定義する。多くの場合,油圧ショベルは,この4つの動作をこの順番で繰り返し実施することでダンプトラックの荷台を作業対象物で満杯にする。B)の運搬動作は多くの場合旋回ブーム上げによって行われる。C)の積込動作は,多くの場合バケットダンプによって行われる。本発明が対象とする積込機械は,アタッチメントとしてバケットを有する油圧ショベルに限られず,グラップルやリフティングマグネット等,運搬物の保持・解放が可能なものを有する油圧ショベルも含まれる。また,油圧ショベルのような旋回機能の無い作業腕を備えるホイールローダ等にも本発明は適用可能である。
In addition, in this paper, for convenience, “loading work (carrying work)” to a dump truck (carrying machine) by a hydraulic shovel (loading machine) is carried out by A) digging a work target (carry) and working in a bucket “Drilling operation” (see Fig. 3) for loading the object and B) “Transporting operation” for moving the bucket to the top of the dump truck platform by combining the swing of the upper swing body and the operation of the front work machine, C) "Loading operation" (see Fig. 4) to release the work object in the bucket onto the dump truck bed (see Fig. 4) and D) Move the bucket to the desired position on the work object to start the digging operation It is defined as an operation including four operations of “reaching operation” to be moved. In many cases, the hydraulic shovel fills the loading platform of the dump truck with the work object by repeatedly performing these four operations in this order. The transport operation of B) is often carried out by a pivoting boom. The loading operation of C) is often performed by bucket dump. The loading machine to which the present invention is applied is not limited to a hydraulic shovel having a bucket as an attachment, but also includes a hydraulic shovel having grapples, lifting magnets, and the like capable of holding and releasing cargo. The present invention is also applicable to a wheel loader or the like provided with a working arm without a turning function such as a hydraulic shovel.
<全体構成>
図1は本実施形態に係る油圧ショベルの側面図であり,図2は本実施形態に係るダンプトラックの側面図である。 <Overall configuration>
FIG. 1 is a side view of a hydraulic shovel according to the present embodiment, and FIG. 2 is a side view of a dump truck according to the present embodiment.
図1は本実施形態に係る油圧ショベルの側面図であり,図2は本実施形態に係るダンプトラックの側面図である。 <Overall configuration>
FIG. 1 is a side view of a hydraulic shovel according to the present embodiment, and FIG. 2 is a side view of a dump truck according to the present embodiment.
図1の油圧ショベル1は,下部走行体10と,下部走行体10の上部に旋回可能に設けられた上部旋回体11と,上部旋回体11の前方に搭載された多関節型の作業腕であるフロント作業機12と,上部旋回体11を回動する油圧モータである旋回モータ19と,上部旋回体11に設けられ操作者が乗り込んでショベル1を操作する操作室20と,操作室20内に設けられ制御レバー22であって油圧ショベル1に搭載されたアクチュエータの動作を制御するための制御レバー22と,記憶装置(例えば,ROM,RAM),演算処理装置(例えばCPU)及び入出力装置を有し油圧ショベル1の動作を制御するコントローラ21によって構成されている。
The hydraulic shovel 1 shown in FIG. 1 includes a lower traveling body 10, an upper revolving body 11 rotatably provided at an upper portion of the lower traveling body 10, and an articulated work arm mounted in front of the upper revolving body 11. A front work machine 12, a swing motor 19 which is a hydraulic motor for rotating the upper swing body 11, an operation room 20 provided on the upper swing body 11 for the operator to get in and operating the shovel 1, and the inside of the operation room 20 Control lever 22 provided in the control unit 22 for controlling the operation of an actuator mounted on the hydraulic shovel 1, a storage unit (eg, ROM, RAM), an arithmetic processing unit (eg, CPU), and an input / output unit And a controller 21 that controls the operation of the hydraulic shovel 1.
フロント作業機12は,上部旋回体11に回動可能に設けられたブーム13と,ブーム13の先端に回動可能に設けられたアーム14と,アーム14の先端に回動可能に設けられたバケット(アタッチメント)15と,ブーム13を駆動する油圧シリンダであるブームシリンダ16と,アーム14を駆動する油圧シリンダであるアームシリンダ17と,バケット15を駆動する油圧シリンダであるバケットシリンダ18を備えている。ブームシリンダ16,アームシリンダ17,及びバケットシリンダ18は,それぞれ,上部旋回体11上に搭載された油圧ポンプ(図示せず)から吐出される圧油によって駆動される。
The front work machine 12 is provided with a boom 13 rotatably provided on the upper swing body 11, an arm 14 rotatably provided at the tip of the boom 13, and a tip of the arm 14. A bucket (attachment) 15, a boom cylinder 16 which is a hydraulic cylinder for driving the boom 13, an arm cylinder 17 which is a hydraulic cylinder for driving the arm 14, and a bucket cylinder 18 which is a hydraulic cylinder for driving the bucket 15 There is. The boom cylinder 16, the arm cylinder 17, and the bucket cylinder 18 are driven by pressure oil discharged from a hydraulic pump (not shown) mounted on the upper swing body 11, respectively.
ブーム13,アーム14,バケット15の回動軸には夫々ブーム角度センサ24,アーム角度センサ25,バケット角度センサ26が取り付けられている。これら角度センサ24,25,26からはブーム13,アーム14,バケット15夫々の回動角度を取得できる。また,上部旋回体11には旋回角速度センサ27と傾斜角度センサ28が取り付けられており,夫々上部旋回体11の旋回角速度と上部旋回体11の前後方向の傾斜角度が取得できるように構成されている。角度センサ24,25,26,27,28の検出値からはフロント作業機12の姿勢を特定できる。
A boom angle sensor 24, an arm angle sensor 25, and a bucket angle sensor 26 are attached to the pivots of the boom 13, the arm 14 and the bucket 15, respectively. The rotation angles of the boom 13, the arm 14 and the bucket 15 can be obtained from the angle sensors 24, 25 and 26, respectively. In addition, a turning angular velocity sensor 27 and an inclination angle sensor 28 are attached to the upper turning body 11 so that the turning angular velocity of the top turning body 11 and the inclination angle in the front-rear direction of the top turning body 11 can be obtained. There is. From the detection values of the angle sensors 24, 25, 26, 27, 28, the attitude of the front working machine 12 can be specified.
ブームシリンダ16およびアームシリンダ17にはそれぞれブームボトム圧センサ29,ブームロッド圧センサ30,アームボトム圧センサ31,アームロッド圧センサ32が取り付けられており,各油圧シリンダ内部の圧力が取得できるように構成されている。圧力センサ29,30,31,32の検出値からは各シリンダ16,18の推力,すなわちフロント作業機12に与えられる駆動力を特定できる。
A boom bottom pressure sensor 29, a boom rod pressure sensor 30, an arm bottom pressure sensor 31, and an arm rod pressure sensor 32 are attached to the boom cylinder 16 and the arm cylinder 17, respectively, so that the pressure inside each hydraulic cylinder can be acquired. It is configured. From the detection values of the pressure sensors 29, 30, 31, 32, it is possible to specify the thrust of each of the cylinders 16, 18, that is, the driving force to be applied to the front working machine 12.
なお,ブーム角度センサ24,アーム角度センサ25,バケット角度センサ26,傾斜角度センサ28,旋回角速度センサ27は,フロント作業機12の姿勢に関する物理量を検出できるものであれば他のセンサに代替可能である。例えば,ブーム角度センサ24,アーム角度センサ25及びバケット角度センサ26はそれぞれ傾斜角センサや慣性計測装置(IMU)に代替可能である。また,ブームボトム圧センサ29,ブームロッド圧センサ30,アームボトム圧センサ31,アームロッド圧センサ32は,ブームシリンダ16及びアームシリンダ17が発生する推力,すなわちフロント作業機12に与えられる駆動力に関する物理量を検出できるものであれば他のセンサに代替可能である。さらに推力や駆動力の検出に代えて,ブームシリンダ16及びアームシリンダ17の動作速度をストロークセンサで検出したり,ブーム13及びアーム14の動作速度をIMUで検出したりすることでフロント作業機12の動作を検出しても良い。
The boom angle sensor 24, the arm angle sensor 25, the bucket angle sensor 26, the inclination angle sensor 28, and the turning angular velocity sensor 27 can be replaced with other sensors as long as they can detect physical quantities related to the posture of the front work machine 12 is there. For example, the boom angle sensor 24, the arm angle sensor 25 and the bucket angle sensor 26 can be replaced by an inclination angle sensor or an inertial measurement unit (IMU), respectively. The boom bottom pressure sensor 29, the boom rod pressure sensor 30, the arm bottom pressure sensor 31, and the arm rod pressure sensor 32 relate to the thrust generated by the boom cylinder 16 and the arm cylinder 17, that is, the driving force applied to the front work machine 12. Other sensors can be substituted as long as physical quantities can be detected. Furthermore, instead of detecting the thrust and the driving force, the front work machine 12 can detect the operating speeds of the boom cylinder 16 and the arm cylinder 17 with a stroke sensor, or detect the operating speeds of the boom 13 and the arm 14 with an IMU. The operation of may be detected.
操作室20の内部には荷重計測システムの計測結果を表示する外部入出力器23が備え付けられ,上部旋回体11の上面にはコントローラ21が外部のコントローラ(例えばコントローラ40)と通信するための無線送受信機33が取り付けられている。
An external input / output unit 23 for displaying the measurement results of the load measurement system is provided inside the operation room 20, and a wireless communication for the controller 21 to communicate with an external controller (for example, the controller 40) on the upper surface of the upper swing body 11 A transceiver 33 is attached.
外部入出力器23としては,コントローラ21での演算結果などを表示する表示装置23A(図3参照)と,オペレータがコントローラ21への情報の入力を行うための入力装置23B(図3参照)とを備えている。表示装置23Aとしては例えば液晶ディスプレイが利用可能であり,入力装置23Bとしては例えばテンキー,タッチパネル,キーボード等が利用可能である。
The external input / output unit 23 includes a display unit 23A (see FIG. 3) for displaying the calculation result of the controller 21 and the like, and an input unit 23B (see FIG. 3) for the operator to input information to the controller 21. Is equipped. For example, a liquid crystal display can be used as the display device 23A, and a numeric keypad, a touch panel, a keyboard, or the like can be used as the input device 23B.
図2のダンプトラック2は,車体34と,車体34に設けられた前後の車軸(図示せず)にそれぞれ取付けられている4つのタイヤ35a,35b,35c,35dと,油圧ショベル1によって積載物が投入される荷台であるベッセル36と,操作者が乗り込みダンプトラック2を操作するための操作室37によって構成されている。
The dump truck 2 shown in FIG. 2 includes a vehicle body 34, four tires 35a, 35b, 35c and 35d attached respectively to front and rear axles (not shown) provided on the vehicle body 34, and a load And the operation chamber 37 for the operator to operate the dump truck 2.
車軸には車体34を支える4本のサスペンション38a,38b,38c,38dが取り付けられている。各サスペンション38a,38b,38c,38dには各サスペンションの圧力を計測するためのサスペンション圧センサ39a,39b,39c,39d(第1車両状態検出器)が備え付けられている。サスペンション圧センサ39a,39b,39c,39dはダンプトラック2に積み込まれた作業対象物の重量に関する物理量としてサスペンション圧を検出している。
Four suspensions 38a, 38b, 38c and 38d for supporting the vehicle body 34 are attached to the axle. Suspension pressure sensors 39a, 39b, 39c, 39d (first vehicle state detectors) for measuring the pressure of the respective suspensions are attached to the respective suspensions 38a, 38b, 38c, 38d. The suspension pressure sensors 39a, 39b, 39c, 39d detect the suspension pressure as a physical quantity related to the weight of the work object loaded on the dump truck 2.
車体34には,記憶装置(例えば,ROM,RAM),演算処理装置(例えばCPU)及び入出力装置を有しダンプトラック2の制御を行うコントローラ40と,コントローラ40が外部のコントローラ(例えばコントローラ21)と通信する無線送受信機42が取り付けられており,操作室37の内部にはダンプトラック2の車体情報を表示するための表示装置41が備え付けられている。表示装置41としては例えば液晶ディスプレイが利用可能である。また,車体34にはダンプトラック2の走行速度を計測する車速センサ(第3車体状態検出器)43が備え付けられている。
The vehicle body 34 has a storage device (for example, ROM, RAM), an arithmetic processing unit (for example, CPU) and an input / output device, a controller 40 for controlling the dump truck 2, and an external controller (for example, controller 21). And a display device 41 for displaying the vehicle body information of the dump truck 2 is provided inside the operation room 37. As shown in FIG. As the display device 41, for example, a liquid crystal display can be used. Further, a vehicle speed sensor (third vehicle body state detector) 43 for measuring the traveling speed of the dump truck 2 is provided on the vehicle body 34.
なお,サスペンション圧センサ39a,39b,39c,39dは,油圧ショベル1によってダンプトラック2に積み込まれた作業対象物の重量に関する物理量を検出可能なセンサであれば他のセンサに代替可能である。また,車速センサ43は,ダンプトラック2の走行状態に関する物理量を検出可能なセンサであれば他のセンサに代替可能である。
The suspension pressure sensors 39a, 39b, 39c and 39d can be replaced by other sensors as long as they can detect the physical quantity related to the weight of the work object loaded on the dump truck 2 by the hydraulic shovel 1. In addition, the vehicle speed sensor 43 may be replaced by another sensor as long as it can detect a physical quantity related to the traveling state of the dump truck 2.
図3および図4は積込作業中の油圧ショベル1の動作の一例を示す概観図である。図3の油圧ショベル1は作業対象物(掘削対象物)3を掘削してバケット15内に作業対象物4を積み込む「掘削動作」を行っており,図4の油圧ショベル1はバケット15内の作業対象物4をダンプトラック2の荷台36に放出(放土)する「積込動作」を行っている。
3 and 4 are schematic views showing an example of the operation of the hydraulic shovel 1 during the loading operation. The hydraulic shovel 1 of FIG. 3 excavates the work target (excitation target) 3 and loads the work target 4 in the bucket 15 and performs the “digging operation”, and the hydraulic shovel 1 of FIG. The “loading operation” is performed to release (release) the work object 4 to the loading platform 36 of the dump truck 2.
<荷重計測のシステム構成>
図5は本実施形態の荷重計測システムのシステム構成図であり,コントローラ40とコントローラ21の内部にはそれぞれの機能をブロック図で示している。
ダンプトラック2側のコントローラ40は,サスペンション圧センサ39a,39b,39c,39dおよび車速センサ43の信号を入力とし,これらを基に算出した情報(例えば後述の積込判定と積込作業判定)を無線送受信機42を介してショベル側のコントローラ21に送信できるように構成されている。 <System configuration of load measurement>
FIG. 5 is a system configuration diagram of the load measuring system according to the present embodiment, and the functions of thecontroller 40 and the controller 21 are shown by block diagrams.
Thecontroller 40 on the dump truck 2 side receives the signals of the suspension pressure sensors 39a, 39b, 39c, 39d and the vehicle speed sensor 43, and calculates information (for example, loading determination and loading operation determination described later) based on these signals. It is comprised so that it can transmit to the controller 21 by the side of a shovel via the radio | wireless transmitter / receiver 42. As shown in FIG.
図5は本実施形態の荷重計測システムのシステム構成図であり,コントローラ40とコントローラ21の内部にはそれぞれの機能をブロック図で示している。
ダンプトラック2側のコントローラ40は,サスペンション圧センサ39a,39b,39c,39dおよび車速センサ43の信号を入力とし,これらを基に算出した情報(例えば後述の積込判定と積込作業判定)を無線送受信機42を介してショベル側のコントローラ21に送信できるように構成されている。 <System configuration of load measurement>
FIG. 5 is a system configuration diagram of the load measuring system according to the present embodiment, and the functions of the
The
また,コントローラ40は,サスペンション圧センサ39a,39b,39c,39dが出力する検出値から演算される作業対象物の重量に基づいて油圧ショベル1によるダンプトラック2への作業対象物の積込(作業対象物の荷台36への投入)が行われたか否かを判定する積込判定部52と,車速センサ43が出力する検出値から演算されるダンプトラック2の速度に基づいてダンプトラック2が油圧ショベル1による作業対象物の積込作業に従事しているか否かを判定する積込作業判定部57と,無線送受信機42を介した情報(例えば,積込判定部52と積込作業判定部57の判定結果)の送受信を制御する送受信部53として機能する。
Also, the controller 40 loads the work object onto the dump truck 2 by the hydraulic shovel 1 based on the weight of the work object calculated from the detection values output from the suspension pressure sensors 39a, 39b, 39c, 39d (work The dump truck 2 is hydraulically operated based on the speed of the dump truck 2 calculated from the detected value output from the loading determination unit 52 that determines whether or not the object has been loaded into the loading platform 36) and the vehicle speed sensor 43 A loading operation determination unit 57 that determines whether the shovel 1 is engaged in the loading operation of the work object and information via the wireless transceiver 42 (for example, the loading determination unit 52 and the loading operation determination unit It functions as a transmission / reception unit 53 that controls transmission / reception of the judgment result (57).
油圧ショベル1側のコントローラ21は,角度センサ24-28及び圧力センサ29-32の出力と,無線送受信機33の受信信号と,入力装置23Bから入力される情報を入力とし,これらを基に算出した情報(例えば,運搬機械2への積込量)を演算し,その情報を表示装置23Aに表示したり,無線送受信機33を介してダンプトラック側のコントローラ40に送信できるように構成されている。
The controller 21 of the hydraulic shovel 1 receives the output of the angle sensor 24-28 and the pressure sensor 29-32, the reception signal of the wireless transceiver 33, and the information input from the input device 23B, and calculates based on these Configured to calculate calculated information (for example, the loading amount to the transporting machine 2) and display the information on the display device 23A or to the controller 40 on the dump truck side via the wireless transceiver 33 There is.
また,コントローラ21は,フロント作業機12の姿勢を示すバケット角度センサ26の検出値とアームシリンダ17の負荷を示すアームボトム圧センサ31及びアームロッド圧センサ32の検出値に基づいて油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かを判定する運搬判定部51と,ブームボトム圧センサ29及びブームロッド圧センサ30の検出値から演算されるブームシリンダ16の推力に基づいて油圧ショベル1によるダンプトラック2への作業対象物の積込に係るバケット15内の作業対象物の荷重(第1の荷重)を演算する荷重演算部50と,無線送受信機33を介した情報(例えば,積込判定部52と積込作業判定部57の判定結果)の送受信を制御する送受信部54と,運搬判定部51,積込判定部52及び積込作業判定部57の判定結果とサスペンション圧センサ39a,39b,39c,39dが出力する検出値等に基づいて荷重計測システムの異常の有無を判定する異常判定部58と,運搬判定部51及び積込判定部52の判定結果等に基づいて荷重演算部50が演算した荷重を積算するか否かを判定する荷重積算可否判定部55と,積算可否判定部55が荷重演算部50の演算した荷重(第1の荷重)を積算すると判定したとき当該荷重を積算することでダンプトラック2の積載荷重を演算し,その演算結果に基づく表示を表示装置23Aに出力する荷重積算部56として機能する。
Further, the controller 21 uses the hydraulic shovel 1 based on the detection value of the bucket angle sensor 26 indicating the posture of the front work machine 12 and the detection values of the arm bottom pressure sensor 31 and the arm rod pressure sensor 32 indicating the load on the arm cylinder 17. For the thrust of the boom cylinder 16 calculated from the detection values of the transportation determination unit 51 that determines whether loading of the work object to the dump truck 2 has been performed, the boom bottom pressure sensor 29 and the boom rod pressure sensor 30 Based on the load calculation unit 50 that calculates the load (first load) of the work object in the bucket 15 related to loading of the work object onto the dump truck 2 by the hydraulic shovel 1 based on the wireless transmitter / receiver 33 Transmission / reception unit 54 that controls transmission and reception of information (for example, determination results of loading determination unit 52 and loading operation determination unit 57); An abnormality determination unit 58 that determines the presence or absence of an abnormality of the load measurement system based on determination results of the loading determination unit 52 and the loading operation determination unit 57 and detection values output from the suspension pressure sensors 39a, 39b, 39c, 39d, etc. The load integration determination unit 55 determines whether to integrate the load calculated by the load calculation unit 50 based on the determination results of the transportation determination unit 51 and the loading determination unit 52, and the integration determination unit 55 determines the load. When it is determined that the load (first load) calculated by the calculation unit 50 is to be integrated, the load of the dump truck 2 is calculated by integrating the load, and the load based on the calculation result is output to the display device 23A It functions as the integration unit 56.
次に本実施形態に係る荷重計測システムが油圧ショベル1での運搬判定とダンプトラック2での積込判定の双方の判定結果に基づいてバケット15内の荷重を積算することでダンプトラック2の積載荷重を演算する方法を図6から図15を用いて説明する。
Next, the load measurement system according to the present embodiment loads the dump truck 2 by integrating the load in the bucket 15 based on the determination results of both the transport determination by the hydraulic shovel 1 and the loading determination by the dump truck 2 The method of calculating the load will be described with reference to FIGS. 6 to 15.
<積込作業判定部57による積込作業判定方法>
図6はダンプトラック2側のコントローラ40における積込作業判定部57が,ダンプトラック2が積込作業に従事しているか否かを判定する方法(第6の判定)を示すフローチャートであり,図7は車速センサ43の検出値と積込作業判定部57による判定結果の関係を示すグラフの一例である。 <Loading Operation Determination Method by LoadingOperation Determination Unit 57>
FIG. 6 is a flowchart showing a method (sixth determination) of a method of determining whether or not thedump truck 2 is engaged in the loading operation by the loading operation determination unit 57 in the controller 40 on the dump truck 2 side. 7 is an example of a graph showing the relationship between the detection value of the vehicle speed sensor 43 and the determination result by the loading operation determination unit 57.
図6はダンプトラック2側のコントローラ40における積込作業判定部57が,ダンプトラック2が積込作業に従事しているか否かを判定する方法(第6の判定)を示すフローチャートであり,図7は車速センサ43の検出値と積込作業判定部57による判定結果の関係を示すグラフの一例である。 <Loading Operation Determination Method by Loading
FIG. 6 is a flowchart showing a method (sixth determination) of a method of determining whether or not the
図6のフローチャートはダンプトラック2のコントローラ40において予め定められたサンプリング周期毎に実行される。
The flowchart of FIG. 6 is executed in the controller 40 of the dump truck 2 every predetermined sampling period.
積込作業判定部57は,まずステップS100においてフローチャートの開始時から一定時間Δtvが経過したか否か判定し,一定時間Δtvが経過していないと判定した場合にはステップS100の実行前に戻り引き続きステップS100で経過時間を監視する。一方,一定時間Δtvが経過していると判定した場合にはステップS101に進む。
First, in step S100, the loading operation determination unit 57 determines whether or not a predetermined time Δtv has elapsed from the start of the flowchart. If it is determined that the predetermined time Δtv has not elapsed, the process returns to the execution of step S100. Subsequently, the elapsed time is monitored in step S100. On the other hand, when it is determined that the predetermined time Δtv has elapsed, the process proceeds to step S101.
ステップS101では積込作業判定が非積込作業中であるか否かを判定する。積込作業判定には,ダンプトラック2が油圧ショベル1とともに積込作業に従事している状態であることを示す「積込作業中」と,ダンプトラック2が積込作業に従事していない状態(例えば走行中)であることを示す「非積込作業中」があり,積込作業判定は後述するステップS103及びS105で設定される。積込作業判定のデフォルト値(図6のフローの開始時の値)は非積込作業中とする。ステップS101で積込作業判定が非積込作業中の場合(YESの場合)はステップS102に移動し,反対に積込作業中の場合(NOの場合)はステップS104に移動する。
In step S101, it is determined whether the loading operation determination is in the non-loading operation. In loading operation determination, “loading operation in progress” indicating that the dump truck 2 is engaged in loading operation with the hydraulic shovel 1 and a state in which the dump truck 2 is not engaged in loading operation There is “during loading operation” (for example, during traveling), and loading operation determination is set in steps S103 and S105 described later. The default value for loading operation determination (value at the start of the flow in FIG. 6) is assumed to be unloading operation. If it is determined in step S101 that the loading operation determination is in the non-loading operation (in the case of YES), the process moves to step S102. On the contrary, in the loading operation (in the case of NO), the process moves to step S104.
ステップS102では車速センサ43の出力に基づいてダンプトラック2の車速(走行速度)が所定値以下か否かを判定する。ここにおける所定値はダンプトラック2が停止しているか否かを判定可能な値とし,例えば1km/hと設定できる。車速が所定値以下の場合はステップS103で積込作業判定を積込作業中と設定した後ステップS106に移動する。一方,車速が所定値を越える場合はステップS103の処理をスキップしてステップS106に移動する。図7に示すように,積込作業判定が「非積込作業」と設定されている間に車速が所定値以下に達した場合には,ダンプトラック2が積込作業のために停止しているとみなし,積込作業判定を「積込作業中」に変更する。
In step S102, it is determined based on the output of the vehicle speed sensor 43 whether the vehicle speed (traveling speed) of the dump truck 2 is equal to or less than a predetermined value. The predetermined value in this case is a value capable of determining whether the dump truck 2 is stopped, and can be set to, for example, 1 km / h. If the vehicle speed is equal to or less than the predetermined value, the loading operation determination is set as loading operation in step S103, and then the process moves to step S106. On the other hand, when the vehicle speed exceeds the predetermined value, the process of step S103 is skipped and the process moves to step S106. As shown in FIG. 7, when the vehicle speed reaches a predetermined value or less while the loading operation determination is set to "non-loading operation", the dump truck 2 is stopped for the loading operation. Change the loading operation judgment to "during loading operation".
ステップS104では車速センサ43の出力に基づいてダンプトラック2の車速が所定値以上か否かを判定する。ここにおける所定値はステップS102の所定値と同じであり,ダンプトラック2が停止しているか否かを判定可能な値とする。車速が所定値以上の場合はステップS105で積込作業判定を非積込作業中と設定した後ステップS106に移動する。一方,車速が所定値未満の場合はステップS105の処理をスキップしてステップS106に移動する。図7に示すように,積込作業判定が「積込作業」と設定されている間に車速が所定値以上に達した場合には,ダンプトラック2が積込作業を終了して走行を開始したとみなし,積込作業判定を「非積込作業中」に変更する。
In step S104, it is determined based on the output of the vehicle speed sensor 43 whether the vehicle speed of the dump truck 2 is equal to or greater than a predetermined value. The predetermined value in this case is the same as the predetermined value in step S102, and is a value capable of determining whether the dump truck 2 is stopped. If the vehicle speed is equal to or higher than the predetermined value, the loading operation determination is set as non-loading operation in step S105, and then the process moves to step S106. On the other hand, when the vehicle speed is less than the predetermined value, the process of step S105 is skipped and the process moves to step S106. As shown in FIG. 7, when the vehicle speed reaches a predetermined value or more while the loading operation determination is set to “loading operation”, the dump truck 2 ends the loading operation and starts traveling. Change the loading operation judgment to "non-loading operation".
最後に積込作業判定部57はステップS106にてダンプトラック2の積込作業判定の結果(積込作業中か非積込作業中か)を送受信部53に出力し,送受信部53はそれを無線送受信機42を介して油圧ショベル1に送信する。ステップS106の処理が終了したらステップS100の前に戻り,積込作業判定部57はステップS106の終了時点から所定時間経過したか否かをステップS100で監視する。
Finally, at step S106, the loading operation determination unit 57 outputs the result of loading operation determination of the dump truck 2 (whether loading operation or non-loading operation) to the transmission / reception unit 53, and the transmission / reception unit 53 It transmits to the hydraulic shovel 1 via the wireless transmitter-receiver 42. When the process of step S106 is completed, the process returns to step S100, and the loading operation determination unit 57 monitors in step S100 whether or not a predetermined time has elapsed from the time of completion of step S106.
なお,ステップS102又はステップS104では,条件を満たす車速が所定時間継続した場合のみにステップS103又はステップS105に進んで積込作業判定を変更するようにフローチャートを構成しても良い。
In step S102 or step S104, the flowchart may be configured to proceed to step S103 or step S105 and change the loading operation determination only when the vehicle speed satisfying the condition continues for a predetermined time.
<積込判定部52による積込判定方法>
図8はダンプトラック2側のコントローラ40の積込判定部52が,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かという判定する方法(第2の判定)を示すフローチャートであり,図9は積込作業に従事しているダンプトラック2のサスペンション圧センサ39aの検出値の時間変化の一例を示すグラフである。 <Load determination method by theload determination unit 52>
FIG. 8 shows a method (second determination) to determine whether theloading determination unit 52 of the controller 40 on the dump truck 2 side has loaded the work object onto the dump truck 2 by the hydraulic shovel 1 or not. FIG. 9 is a flowchart showing an example, and is a graph showing an example of the time change of the detection value of the suspension pressure sensor 39a of the dump truck 2 engaged in the loading operation.
図8はダンプトラック2側のコントローラ40の積込判定部52が,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かという判定する方法(第2の判定)を示すフローチャートであり,図9は積込作業に従事しているダンプトラック2のサスペンション圧センサ39aの検出値の時間変化の一例を示すグラフである。 <Load determination method by the
FIG. 8 shows a method (second determination) to determine whether the
図8の各ステップはダンプトラック2のコントローラ40において予め定められたサンプリング周期で実行される。
Each step in FIG. 8 is executed in the controller 40 of the dump truck 2 at a predetermined sampling period.
積込判定部52は,まずステップS110においてフローチャートの開始時から一定時間Δtpが経過したか否か判定し,一定時間Δtpが経過していないと判定した場合にはステップS110の実行前に戻り引き続きステップS110で経過時間を監視する。一方,一定時間Δtpが経過していると判定した場合にはステップS111に進む。
First, in step S110, the loading determination unit 52 determines whether or not a predetermined time Δtp has elapsed from the start of the flowchart. If it is determined that the predetermined time Δtp has not elapsed, the process returns to step S110 and continues. The elapsed time is monitored in step S110. On the other hand, when it is determined that the predetermined time Δtp has elapsed, the process proceeds to step S111.
ステップS111では4つのサスペンション圧センサ39a-39dから出力される圧力値を取得する。
In step S111, pressure values output from the four suspension pressure sensors 39a to 39d are acquired.
ステップS112では各サスペンション圧センサ39a-39dのステップS111の圧力値について前回の圧力値との差分ΔPを算出し,4つの差分のいずれかが所定値以上か否かを判定する。ここで「前回の圧力」とは1制御周期前(Δtp前)のステップS111で取得されステップS115で保存された圧力値である。ここにおける所定値はダンプトラック2の荷台36に作業対象物が投入されたか否かを判定可能な値とし,例えばバケット容量の半分の作業対象物の重量で増加する圧力値と設定できる。ダンプトラック2は作業対象物が荷台に投入されると,図9のt1からt2,およびt3からt4の区間で示すようにサスペンション38a-38dの圧力が上昇する。なお図8では説明の簡略の為,サスペンション38aに係る圧力の変化のみを示しており,以降の説明における添え字はサスペンション38a―38dと対応する。ステップS112では,4つの差分ΔPa-ΔPdのいずれかが所定値以上の場合は作業対象物が荷台36に投入されたと判断し,ステップS113に進む。そうでない場合はステップS115に進む。
In step S112, a difference ΔP between the pressure value in step S111 of each of the suspension pressure sensors 39a to 39d and the previous pressure value is calculated, and it is determined whether any one of the four differences is equal to or more than a predetermined value. Here, “previous pressure” is a pressure value acquired in step S111 one control cycle before (Δtp before) and stored in step S115. The predetermined value in this case can be set to a value capable of determining whether or not the work object has been loaded into the loading platform 36 of the dump truck 2, and can be set, for example, as a pressure value that increases with the weight of the work object of half the bucket capacity. In the dump truck 2, when the work object is loaded into the loading platform, the pressure of the suspensions 38a to 38d increases as shown in the sections from t1 to t2 and t3 to t4 in FIG. Note that FIG. 8 shows only a change in pressure related to the suspension 38a for simplicity of explanation, and subscripts in the following description correspond to the suspensions 38a to 38d. In step S112, when any of the four differences ΔPa-ΔPd is equal to or greater than a predetermined value, it is determined that the work object has been loaded into the loading platform 36, and the process proceeds to step S113. If not, the process proceeds to step S115.
ステップS113では積込判定部52は投入された作業対象物の重量(積込量)M(第2の荷重)を演算する。サスペンション38a-38dの内径をAa-Ad,重力加速度をgとすると作業対象物の重量M(第2の荷重)は以下の式(1)で表される。
In step S113, the loading determination unit 52 calculates the weight (loading amount) M (second load) of the input work object. Assuming that the inner diameter of each of the suspensions 38a to 38d is Aa-Ad, and the gravitational acceleration is g, the weight M (second load) of the work target is expressed by the following equation (1).
M=(Aa・ΔPa+Ab・ΔPb+Ac・ΔPc+Ad・ΔPd)/g …(1)
ステップS113で積込量Mを演算したら,積込判定部52はステップS114で油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたという判定(積込判定)をし,送受信部53は無線送受信機42を介してその判定結果(積込判定)と積込量Mを油圧ショベル1側のコントローラ21に送信し,ステップS115に進む。 M = (Aa · ΔPa + Ab · ΔPb + Ac · ΔPc + Ad · ΔPd) / g (1)
After calculating the loading amount M in step S113, theloading determination unit 52 determines (loading determination) that loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed in step S114, and transmits and receives The unit 53 transmits the determination result (loading determination) and the loading amount M to the controller 21 of the hydraulic shovel 1 via the wireless transceiver 42, and the process proceeds to step S115.
ステップS113で積込量Mを演算したら,積込判定部52はステップS114で油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたという判定(積込判定)をし,送受信部53は無線送受信機42を介してその判定結果(積込判定)と積込量Mを油圧ショベル1側のコントローラ21に送信し,ステップS115に進む。 M = (Aa · ΔPa + Ab · ΔPb + Ac · ΔPc + Ad · ΔPd) / g (1)
After calculating the loading amount M in step S113, the
ステップS115では,積込判定部52は次回のステップS112の演算における前回サスペンション圧として今回のステップS111で取得した各サスペンション圧を保存し,送受信部53はその各サスペンション圧を無線送受信機42を介して油圧ショベル1側のコントローラ21に送信する。その後,ステップS110の前に戻り,積込判定部52は再び一定時間Δtpが経過するまで待機する。
In step S115, the loading determination unit 52 saves each suspension pressure acquired in this step S111 as the previous suspension pressure in the calculation of the next step S112, and the transmitting and receiving unit 53 uses the suspension pressure via the wireless transceiver 42. And sends it to the controller 21 on the hydraulic shovel 1 side. Thereafter, the process returns to the front of step S110, and the loading determination unit 52 stands by again until a predetermined time Δtp elapses.
<運搬判定部51による運搬判定方法>
図10は油圧ショベル1側のコントローラ21における運搬判定部51が,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かを判定する方法(第1の判定)を示すフローチャートであり,図11はアームボトム圧センサ31の検出値(アームシリンダボトム圧力)及びバケット角度センサ26の検出値(アーム-バケット相対角度)と運搬判定部51による判定結果の関係を示すグラフの一例である。 <Transportation determination method by thetransport determination unit 51>
FIG. 10 shows a method (first determination) for determining whether or not loading of the work object onto thedump truck 2 by the hydraulic shovel 1 has been performed by the transport determining unit 51 in the controller 21 on the hydraulic shovel 1 side. FIG. 11 is a flowchart showing the relationship between the detection value of the arm bottom pressure sensor 31 (arm cylinder bottom pressure) and the detection value of the bucket angle sensor 26 (arm-bucket relative angle) and the determination result by the conveyance determination unit 51. It is an example.
図10は油圧ショベル1側のコントローラ21における運搬判定部51が,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かを判定する方法(第1の判定)を示すフローチャートであり,図11はアームボトム圧センサ31の検出値(アームシリンダボトム圧力)及びバケット角度センサ26の検出値(アーム-バケット相対角度)と運搬判定部51による判定結果の関係を示すグラフの一例である。 <Transportation determination method by the
FIG. 10 shows a method (first determination) for determining whether or not loading of the work object onto the
図10のフローチャートは油圧ショベル1のコントローラ21において予め定められたサンプリング周期毎に実行される。
The flowchart of FIG. 10 is executed in each controller 21 of the hydraulic shovel 1 at predetermined sampling intervals.
運搬判定部51は,ステップS120でアームボトム圧センサ31の出力を監視し,予め設定されている閾値1より低い状態から閾値1を超えたか否か判定する。油圧ショベル1はアームシリンダ17を押し出して掘削するため,図11の下側のグラフに示すようにアームシリンダボトム圧は掘削動作中に大きくなるので,本実施形態ではアームボトム圧が閾値1を上回ったタイミングで掘削動作を開始したとみなしている。ステップS120でアームボトム圧が閾値1より低い状態から閾値1を超えたと判定された場合は,運搬判定部51は油圧ショベル1が掘削動作を開始したと判定してステップS121に進む。反対にアームボトム圧が閾値1より低い状態から閾値1を超えない場合(閾値1以下を保持する場合)はステップS120の前に戻り,アームボトム圧センサ31の出力の監視を続行する。
The conveyance determination unit 51 monitors the output of the arm bottom pressure sensor 31 in step S120, and determines whether the threshold 1 has been exceeded from a state lower than the threshold 1 set in advance. Since the hydraulic shovel 1 extrudes the arm cylinder 17 and excavates, as shown in the lower graph of FIG. 11, the arm cylinder bottom pressure increases during the excavating operation, so the arm bottom pressure exceeds the threshold 1 in this embodiment. It is considered that the drilling operation has started at the right timing. When it is determined in step S120 that the arm bottom pressure is lower than the threshold 1 and the threshold 1 is exceeded, the transport determining unit 51 determines that the hydraulic shovel 1 has started the digging operation, and proceeds to step S121. Conversely, if the arm bottom pressure does not exceed the threshold 1 from the state of being lower than the threshold 1 (if the threshold 1 or lower is maintained), the process returns to step S120 and monitoring of the output of the arm bottom pressure sensor 31 is continued.
ステップS121では引き続きアームボトム圧センサ31の出力を監視し,予め設定されている閾値2より高い状態から閾値2を下回ったか否か判定する。図11の下側のグラフに示すようにアームシリンダボトム圧は掘削動作が終了すると小さくなるので,本実施形態ではアームボトム圧が閾値2を下回ったタイミングで掘削動作が終了し,運搬動作を開始したとみなしている。ステップS121でアームボトム圧が閾値2より高い状態から閾値2を下回ったと判定された場合は,運搬判定部51は油圧ショベル1が掘削動作を終了し且つ運搬動作を開始したと判定(第4の判定(その1))してステップS122に進む。反対にアームボトム圧が閾値2より高い状態から閾値2を下回らない場合(閾値2以上を保持する場合)は運搬判定部51は掘削動作が継続していると判定し,ステップS121の前に戻ってアームボトム圧センサ31の出力の監視を続行する。
In step S121, the output of the arm bottom pressure sensor 31 is continuously monitored, and it is determined whether or not the threshold value 2 is exceeded from a state higher than the threshold value 2 set in advance. As shown in the lower graph of FIG. 11, the arm cylinder bottom pressure decreases when the digging operation ends, so in the present embodiment, the digging operation ends at the timing when the arm bottom pressure falls below the threshold 2 and the transport operation starts I consider it to be. If it is determined in step S121 that the arm bottom pressure is higher than the threshold 2 and lower than the threshold 2 in step S121, the conveyance determining unit 51 determines that the hydraulic shovel 1 ends the digging operation and starts the conveyance operation (fourth The determination (part 1) is made, and the process proceeds to step S122. On the contrary, when the arm bottom pressure does not fall below the threshold 2 from the state where it is higher than the threshold 2 (when holding the threshold 2 or more), the transport determining unit 51 determines that the digging operation continues, and returns to step S121. Then, monitoring of the output of the arm bottom pressure sensor 31 is continued.
なお,閾値1と閾値2の関係に関して,図11に示した例では閾値1<閾値2の関係が成り立っているがこれは一例に過ぎず,油圧ショベル1の掘削動作の開始と終了の判定が可能な範囲で任意の値を設定できる。またその際,閾値1と閾値2の大小関係は問わないものとする。
With regard to the relationship between threshold 1 and threshold 2, in the example shown in FIG. 11, the relationship of threshold 1 <threshold 2 holds, but this is only an example, and the determination of the start and end of the excavation operation of hydraulic excavator 1 Any value can be set as far as possible. At that time, the magnitude relationship between the threshold 1 and the threshold 2 does not matter.
ステップS122では運搬判定部51は運搬動作が開始したという判定を外部に出力しステップS123に進む。このときの判定の出力先には荷重積算可否判定部55が含まれる。
In step S122, the conveyance determination unit 51 outputs the determination that the conveyance operation has started to the outside, and the process proceeds to step S123. The load integration determination unit 55 is included in the output destination of the determination at this time.
ステップS123では,運搬判定部51はバケット角度センサ26の出力を監視し,アーム-バケット間の相対角度(アーム14とバケット15のなす角)が予め設定されている閾値3を上回ったか否か判定する。運搬動作を終え積込動作を開始する油圧ショベル1はバケット15内の土砂(掘削対象物)を放出するためにアーム14とバケット15のなす角を広げるように動作する。つまり図11の上側のグラフに示すようにアーム14とバケット15の相対角度は運搬動作から積込動作に遷移する際に大きくなるので,本実施形態ではアーム14とバケット15の相対角度が閾値3を上回ったタイミングで運搬動作が終了し,積込動作を開始したとみなしている。ステップS123でアーム-バケット相対角度が閾値3を上回ったと判定された場合は,運搬判定部51は油圧ショベル1が運搬動作を終了し且つ積込動作を開始したと判定(第4の判定(その2))してステップS124に進む。反対にアーム-バケット相対角度が閾値3を上回らないと判定された場合(閾値3以下を保持する場合)は,運搬判定部51は運搬動作が継続していると判定し,ステップS123の前に戻ってバケット角度センサ26の出力の監視を続行する。
In step S123, the conveyance determining unit 51 monitors the output of the bucket angle sensor 26, and determines whether the relative angle between the arm and the bucket (the angle formed by the arm 14 and the bucket 15) exceeds a preset threshold 3 or not. Do. The hydraulic shovel 1 which completes the transportation operation and starts the loading operation operates to widen the angle between the arm 14 and the bucket 15 in order to discharge the soil (the object to be excavated) in the bucket 15. That is, as shown in the upper graph of FIG. 11, the relative angle between the arm 14 and the bucket 15 becomes large when transitioning from the carrying operation to the loading operation, so in this embodiment the relative angle between the arm 14 and the bucket 15 is the threshold 3 It is considered that the transport operation is finished and the loading operation is started at the timing when it exceeds. If it is determined in step S123 that the arm-bucket relative angle exceeds the threshold 3, the transport determining unit 51 determines that the hydraulic shovel 1 has finished the transport operation and has started the loading operation (the fourth determination ( 2)) and the process proceeds to step S124. Conversely, if it is determined that the arm-bucket relative angle does not exceed the threshold 3 (if the threshold 3 or less is maintained), the transport determining unit 51 determines that the transport operation is continuing, and before step S123 Then, the monitoring of the output of the bucket angle sensor 26 is continued.
ステップS124では運搬判定部51は運搬動作が終了したという判定(積込動作が開始したという判定)を外部に出力しステップS120に戻る。このときの判定の出力先には荷重積算可否判定部55と異常判定部58が含まれる。
In step S124, the transport determination unit 51 outputs a determination that the transport operation has ended (determination that the loading operation has started) to the outside, and returns to step S120. The output destination of the determination at this time includes the load integration determination unit 55 and the abnormality determination unit 58.
<異常判定部58による異常判定方法>
図12は油圧ショベル1側のコントローラ21における異常判定部58が本実施形態の荷重計測システムの異常の有無を判定する方法(第5の判定)を示すフローチャートである。 <Abnormality judgment method byabnormality judgment unit 58>
FIG. 12 is a flowchart showing a method (fifth determination) of determining the presence or absence of an abnormality of the load measuring system of the present embodiment by theabnormality determining unit 58 in the controller 21 of the hydraulic shovel 1 side.
図12は油圧ショベル1側のコントローラ21における異常判定部58が本実施形態の荷重計測システムの異常の有無を判定する方法(第5の判定)を示すフローチャートである。 <Abnormality judgment method by
FIG. 12 is a flowchart showing a method (fifth determination) of determining the presence or absence of an abnormality of the load measuring system of the present embodiment by the
図12のフローチャートは油圧ショベル1のコントローラ21において予め定められたサンプリング周期毎に実行される。
The flowchart of FIG. 12 is executed in each controller 21 of the hydraulic shovel 1 at predetermined sampling intervals.
異常判定部58は,まずステップS130で,ダンプトラック2から受信した積込作業判定(図6のステップS106で送信される積込作業判定の結果)が積込作業に設定されているか否かを判定し,「積込作業」に設定されている場合はステップS133に進み,「非積込作業」に設定されている場合はステップS131に進む。
In step S130, the abnormality determination unit 58 first determines whether the loading operation determination received from the dump truck 2 (the result of the loading operation determination transmitted in step S106 of FIG. 6) is set as the loading operation. If it is determined that "loading operation" is set, the process proceeds to step S133, and if "unloading operation" is set, the process proceeds to step S131.
ステップS131では異常判定部58は,フローチャートの開始時から所定時間Δtwが経過したか否かを判定し,積込作業判定の結果の受信が無い状態が続いていないか確認する。ここにおける所定時間Δtwは,積込作業判定部57による図6のフローチャートの実行周期以上の時間,すなわち図6のステップS100の一定時間Δtv以上の時間とする。なお,Δtwの値はΔtv以上かつΔtvの2倍以下の値が好ましい。ダンプトラック2のコントローラ40は図6に示すように一定周期Δtvで積込作業判定の結果を送信しているため,積込作業判定の結果の受信が当該一定周期Δtvを越えても無い場合は,ダンプトラック2のコントローラ40との通信が行われていないおそれがある。ステップS131で所定時間Δtwが経過していないと判定した場合はステップS130の前に戻り,ステップS130で積込作業判定の結果の受信がないか再度監視する。一方,所定時間Δtwが経過したと判定した場合はステップS132に進む。
In step S131, the abnormality determination unit 58 determines whether or not a predetermined time Δtw has elapsed from the start of the flowchart, and confirms whether there is no reception of the result of the loading operation determination. The predetermined time Δtw in this case is a time longer than the execution cycle of the flowchart of FIG. 6 by the loading operation determination unit 57, that is, a time longer than the predetermined time Δtv in step S100 of FIG. Preferably, the value of Δtw is not less than Δtv and not more than twice the value of Δtv. Since the controller 40 of the dump truck 2 transmits the result of the loading operation determination at a constant period Δtv as shown in FIG. 6, if reception of the result of the loading operation determination does not exceed the predetermined period Δtv, , There is a possibility that communication with the controller 40 of the dump truck 2 is not performed. If it is determined in step S131 that the predetermined time Δtw has not elapsed, the process returns to step S130, and in step S130, it is monitored again whether or not the result of the loading operation determination has been received. On the other hand, when it is determined that the predetermined time Δtw has elapsed, the process proceeds to step S132.
ステップS132では運搬判定部51において油圧ショベル1が運搬動作を終了したと判定されたか否かを判定する。ここで運搬動作の終了の判定が無い場合にはステップS130の前に戻り,ステップS130で積込作業判定の結果の受信がないか再度監視する。一方,運搬動作の終了の判定があった場合はステップS137に進みシステムに異常が有ると判定して異常判定を出力する。このようにステップS131において積込作業判定の結果が所定期間Δtw受信できていないと判定し,かつステップS132において油圧ショベル1が運搬を終了したと判定した場合は,油圧ショベル1はダンプトラック2に積込を行っているが両者の通信は確立していないと判断できる。つまり,ステップS132でYESと判定された場合,通信関係の異常が有ると判断できる。なお,ステップS132では運搬動作の終了に代えて積込動作の開始を判定しても良い。
In step S132, it is determined in the transport determination unit 51 whether or not it is determined that the hydraulic shovel 1 has finished the transport operation. Here, if there is no determination of the end of the transport operation, the process returns to the front of step S130, and it is monitored again in step S130 whether or not the result of the loading operation determination has been received. On the other hand, if it is determined that the transport operation has ended, the process proceeds to step S137, determines that the system has an abnormality, and outputs an abnormality determination. As described above, when it is determined in step S131 that the result of the loading operation determination has not been received for the predetermined period Δtw, and it is determined in step S132 that the hydraulic shovel 1 has finished transporting, the hydraulic shovel 1 It can be determined that the loading is in progress but the communication between the two is not established. That is, when it is determined YES in step S132, it can be determined that there is an abnormality in the communication relationship. In step S132, the start of the loading operation may be determined instead of the end of the transport operation.
ステップS130で積込作業判定が「積込作業中」に設定されている場合は,図8のステップS115でダンプトラック2のコントローラ40から送信されるサスペンション圧センサ39a-39dの出力値に異常がないかステップS133で判定する(第5の判定)。具体的には,ダンプトラック2に積み込まれた作業対象物の重量を示すサスペンション圧センサ39a-39dの出力値から4つのサスペンションの圧力値の平均値を算出し,その平均値に対する当該4つの圧力値の偏差をそれぞれ算出し,その4つの偏差の全てが所定値以内であれば,サスペンション圧センサ39a-39dに異常がないとみなしてステップS134に進む。一方,当該4つの偏差に所定値以上のものが含まれる場合はシステムに異常があると判定する。サスペンション圧センサ39a-39dのいずれかが故障した場合,圧力値が正常に出力されなくなり,故障していないセンサとの出力値の偏差が大きくなる。そのためステップS133でNOと判定された場合は圧力センサ39a-39dが故障している可能性があると判断できる。
When the loading operation determination is set to "loading operation" in step S130, the output values of the suspension pressure sensors 39a to 39d transmitted from the controller 40 of the dump truck 2 in step S115 of FIG. 8 are abnormal. It is determined in step S133 whether there is any (fifth determination). Specifically, the average value of the pressure values of the four suspensions is calculated from the output values of the suspension pressure sensors 39a to 39d indicating the weight of the work object loaded in the dump truck 2, and the four pressures relative to the average value Deviations of the values are respectively calculated, and if all the four deviations are within the predetermined value, it is regarded that there is no abnormality in the suspension pressure sensors 39a to 39d, and the process proceeds to step S134. On the other hand, when the four deviations include one having a predetermined value or more, it is determined that the system has an abnormality. When one of the suspension pressure sensors 39a to 39d fails, the pressure value is not output normally, and the deviation of the output value from the non-failed sensor increases. Therefore, when it is determined NO in step S133, it can be determined that there is a possibility that the pressure sensors 39a to 39d are broken.
ステップS134では,異常判定部58は,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたという判定(図8のステップS114で送信される積込判定)をダンプトラック2のコントローラ40から受信したか否か判定する。積込判定を受信したと判定した場合はステップS135に進み,そうでない場合はステップS130の前に戻り,積込判定の受信があったか否かを再度監視する。
In step S134, the abnormality determination unit 58 determines that loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed (loading determination transmitted in step S114 of FIG. 8). It is determined whether it has been received from the controller 40 or not. If it is determined that the loading determination has been received, the process proceeds to step S135. If not, the process returns to step S130 to monitor again whether or not the loading determination has been received.
ステップS135では,後述する図14のステップS146において荷重演算部50から出力されるバケット15内の作業対象物の荷重値(第1の荷重)と,図8のステップS114において積込判定部52から出力される積込量M(第2の荷重)を比較し,両者の偏差(重量偏差)が所定値以内か否か判定する。重量偏差が所定値以内の場合はステップS136でシステムは正常であると判定する。一方,重量偏差が所定値を越える場合はステップS137でシステムに異常があると判定する。このようにステップS135でNOと判断された場合は油圧ショベル1の荷重演算部50とダンプトラック2の積込判定部52のいずれかにトラブルが発生した可能性があると判断できる。
In step S135, the load value (first load) of the work object in the bucket 15 output from the load calculation unit 50 in step S146 of FIG. 14 described later and the loading determination unit 52 in step S114 of FIG. The output loading amount M (second load) is compared, and it is determined whether or not the deviation (weight deviation) between the two is within a predetermined value. If the weight deviation is within the predetermined value, it is determined in step S136 that the system is normal. On the other hand, when the weight deviation exceeds the predetermined value, it is determined in step S137 that there is an abnormality in the system. As described above, when NO is determined in step S135, it can be determined that there is a possibility that a problem has occurred in either the load calculation unit 50 of the hydraulic shovel 1 or the loading determination unit 52 of the dump truck 2.
なお,図12のフローチャートに基づくシステム異常の判定結果は油圧ショベル1側のコントローラ21内部に保存され,コントローラ21自身や他の装置やコンピュータに適宜参照されるものとする。一度ステップS137において異常と判定された場合であっても,その後,ダンプトラック2が入れ替わること等によりステップS136に進むことがあれば,システムは正常であるという判定結果が保存されることになる。
The determination result of the system abnormality based on the flowchart of FIG. 12 is stored in the controller 21 of the hydraulic shovel 1 and is referred to as appropriate by the controller 21 itself, another apparatus, or a computer. Even if the process is determined to be abnormal at step S137, if the process proceeds to step S136 after the dump truck 2 is replaced or the like, the determination result that the system is normal is stored.
<荷重演算部50による作業対象物の瞬時荷重演算方法>
図13は油圧ショベル1側のコントローラ21における荷重演算部50によるバケット15内の作業対象物の瞬時荷重Mlの演算方法の説明図である。本実施形態では,ブーム13の回動軸周りに作用するトルクであって,ブームシリンダ16が発生するトルクと,フロント作業機12が重力と旋回遠心力により発生するトルクと,作業対象物が重力と旋回遠心力により発生するトルクの釣合を利用して荷重を算出する。 <Method of calculating instantaneous load of work object byload calculation unit 50>
FIG. 13 is an explanatory view of a calculation method of the instantaneous load Ml of the work object in thebucket 15 by the load calculation unit 50 in the controller 21 on the hydraulic shovel 1 side. In this embodiment, the torque acting around the pivot axis of the boom 13, the torque generated by the boom cylinder 16, the torque generated by the front work machine 12 by gravity and the turning centrifugal force, and the work object by gravity The load is calculated using the balance of the torque generated by the rotation centrifugal force.
図13は油圧ショベル1側のコントローラ21における荷重演算部50によるバケット15内の作業対象物の瞬時荷重Mlの演算方法の説明図である。本実施形態では,ブーム13の回動軸周りに作用するトルクであって,ブームシリンダ16が発生するトルクと,フロント作業機12が重力と旋回遠心力により発生するトルクと,作業対象物が重力と旋回遠心力により発生するトルクの釣合を利用して荷重を算出する。 <Method of calculating instantaneous load of work object by
FIG. 13 is an explanatory view of a calculation method of the instantaneous load Ml of the work object in the
ブームシリンダ16の推力Fcylはブームボトム圧センサ29の出力信号とブームロッド圧センサ30の出力信号のそれぞれにブームシリンダ16の受圧面積を乗じた後,それらの差をとることで算出される。ブームシリンダ16が発生するトルクTbmは,ブーム回動軸とブームシリンダ16の推力Fcylの作用点を結んだ線分の長さをLbm,ブームシリンダ16の推力Fcylと線分Lbmと推力の方向が成す角度θbmcylとして以下の式(2)で算出される。
The thrust Fcyl of the boom cylinder 16 is calculated by multiplying each of the output signal of the boom bottom pressure sensor 29 and the output signal of the boom rod pressure sensor 30 by the pressure receiving area of the boom cylinder 16 and calculating the difference between them. The torque Tbm generated by the boom cylinder 16 is Lbm, and the direction of the thrust Fcyl of the boom cylinder 16, the line segment Lbm, and the thrust direction is the length of a line connecting the boom rotation shaft and the application point of the thrust Fcyl of the boom cylinder 16. It is calculated by the following equation (2) as the formed angle θbmcyl.
Tbm=Fcyl・Lbm・sin(θbmcyl) …(2)
フロント作業機12が重力により発生するトルクTgfrは,フロント作業機12の重心重量をMfr,重力加速度をg,ブーム回動軸とフロント重心までの前後方向の長さをLfrとして以下の式(3)で算出される。 Tbm = Fcyl Lbm sin (θbmcyl) (2)
The torque Tgfr generated by gravity of the front workingmachine 12 is Mfr, the gravity acceleration of the front working machine 12 is g, the length of the boom rotation axis and the front gravity center is Lfr, and the following equation (3) Calculated by).
フロント作業機12が重力により発生するトルクTgfrは,フロント作業機12の重心重量をMfr,重力加速度をg,ブーム回動軸とフロント重心までの前後方向の長さをLfrとして以下の式(3)で算出される。 Tbm = Fcyl Lbm sin (θbmcyl) (2)
The torque Tgfr generated by gravity of the front working
Tgfr=Mfr・g・Lfr …(3)
フロント作業機12が旋回遠心力により発生するトルクTcfrは,旋回角速度をω,ブーム回動軸とフロント重心を結ぶ線分と水平面が成す角度をθfrとして以下の式(4)で算出される。 Tgfr = Mfr · g · Lfr (3)
The torque Tcfr generated by thefront working machine 12 by the turning centrifugal force is calculated by the following equation (4), where the turning angular velocity is ω, and the angle formed by the line connecting the boom rotation axis and the front center of gravity and the horizontal plane is θfr.
フロント作業機12が旋回遠心力により発生するトルクTcfrは,旋回角速度をω,ブーム回動軸とフロント重心を結ぶ線分と水平面が成す角度をθfrとして以下の式(4)で算出される。 Tgfr = Mfr · g · Lfr (3)
The torque Tcfr generated by the
Tcfr=Mfr・Lfr・ω2・sin(θfr) …(4)
なお,Mfr,Lfr,θfrは予め設定されたブーム13,アーム14,バケット15のそれぞれの重心位置,重量と,ブーム角度センサ24,アーム角度センサ25,バケット角度センサ26,傾斜角度センサ28から出力される角度信号から算出される。 Tcfr = Mfr · Lfr · ω2 · sin (θfr) (4)
Mfr, Lfr and θfr are output from the position of the center of gravity and weight ofboom 13, arm 14 and bucket 15 set in advance, and from boom angle sensor 24, arm angle sensor 25, bucket angle sensor 26 and inclination angle sensor 28 It is calculated from the angle signal to be
なお,Mfr,Lfr,θfrは予め設定されたブーム13,アーム14,バケット15のそれぞれの重心位置,重量と,ブーム角度センサ24,アーム角度センサ25,バケット角度センサ26,傾斜角度センサ28から出力される角度信号から算出される。 Tcfr = Mfr · Lfr · ω2 · sin (θfr) (4)
Mfr, Lfr and θfr are output from the position of the center of gravity and weight of
作業対象物が重力により発生するトルクTglは,作業対象物の瞬時荷重をMl,ブーム回動軸とバケット重心までの前後方向の長さをLlとして以下の式(5)で算出される。
The torque Tgl generated by gravity of the work object is calculated by the following equation (5), where the instantaneous load of the work object is Ml and the length of the boom rotation axis and the bucket center of gravity is Ll.
Tgl=Ml・g・Ll …(5)
作業対象物が旋回遠心力により発生するトルクTclは,ブーム回動軸と作業対象物の重心を結ぶ線分と水平面が成す角度をθlとして以下の式(6)で算出される。 Tgl = Ml · g · Ll (5)
The torque Tcl generated by the work object by the turning centrifugal force is calculated by the following equation (6), where the angle formed by the line connecting the boom rotation axis and the center of gravity of the work object and the horizontal plane is θl.
作業対象物が旋回遠心力により発生するトルクTclは,ブーム回動軸と作業対象物の重心を結ぶ線分と水平面が成す角度をθlとして以下の式(6)で算出される。 Tgl = Ml · g · Ll (5)
The torque Tcl generated by the work object by the turning centrifugal force is calculated by the following equation (6), where the angle formed by the line connecting the boom rotation axis and the center of gravity of the work object and the horizontal plane is θl.
Tcl=Ml・Ll・ω2・sin(θl) …(6)
式(1)から(5)の釣合いを変形して作業対象物の瞬時荷重Mlに関して展開すると,瞬時荷重Mlは以下の式(7)で算出される。 Tcl = Ml·Ll · ω2 · sin (θl) (6)
When the balances of the equations (1) to (5) are deformed and developed with respect to the instantaneous load Ml of the work object, the instantaneous load Ml is calculated by the following equation (7).
式(1)から(5)の釣合いを変形して作業対象物の瞬時荷重Mlに関して展開すると,瞬時荷重Mlは以下の式(7)で算出される。 Tcl = Ml·Ll · ω2 · sin (θl) (6)
When the balances of the equations (1) to (5) are deformed and developed with respect to the instantaneous load Ml of the work object, the instantaneous load Ml is calculated by the following equation (7).
Ml=(Tbm-Tgfr-Tcfr)/
(Ll・(g+ω2・sin(θl))) …(7)
式(2)から(8)による荷重の演算は,センサのノイズや油圧回路の特性などにより運搬中常に一定の値を出力できないので,油圧ショベル1が運搬動作中の所定期間に算出した瞬時荷重Mlを平均化して,作業対象物の荷重(第1の荷重)を確定する。 Ml = (Tbm-Tgfr-Tcfr) /
(Ll · (g +ω 2 · sin (θl))) (7)
The load calculation by Equations (2) to (8) can not always output a constant value during transportation due to sensor noise or the characteristics of the hydraulic circuit etc. Therefore, the instantaneous load calculated during a predetermined period during transportation operation ofhydraulic excavator 1 Determine the load (first load) of the work object by averaging Ml.
(Ll・(g+ω2・sin(θl))) …(7)
式(2)から(8)による荷重の演算は,センサのノイズや油圧回路の特性などにより運搬中常に一定の値を出力できないので,油圧ショベル1が運搬動作中の所定期間に算出した瞬時荷重Mlを平均化して,作業対象物の荷重(第1の荷重)を確定する。 Ml = (Tbm-Tgfr-Tcfr) /
(Ll · (g +
The load calculation by Equations (2) to (8) can not always output a constant value during transportation due to sensor noise or the characteristics of the hydraulic circuit etc. Therefore, the instantaneous load calculated during a predetermined period during transportation operation of
<荷重演算部50による作業対象物の荷重確定方法と荷重積算部56によるダンプトラック2の積載重量確定方法>
図14は油圧ショベル1側のコントローラ21における荷重演算部50,荷重積算可否判定部55及び荷重積算部56が実行する処理のフローチャートである。ここでは図14を用いて,荷重演算部50が運搬中のバケット内の作業対象物の荷重(第1の荷重)を確定し,荷重積算可否判定部55がその荷重(第1の荷重)を積算するか否か判定し(第3の判定),荷重積算部56が荷重を積算することで積載重量を出力する方法について説明する。 <Method of Determining Load of Work Object byLoad Calculation Unit 50 and Method of Determining Load Weight of Dump Truck 2 by Load Integration Unit 56>
FIG. 14 is a flowchart of processing executed by theload calculation unit 50, the load integration determination unit 55, and the load integration unit 56 in the controller 21 of the hydraulic excavator 1 side. Here, using FIG. 14, the load calculation unit 50 determines the load (first load) of the work object in the bucket being transported, and the load integration determination unit 55 determines the load (first load). A method of outputting the load weight by determining whether or not to integrate (third determination) and integrating the load by the load integration unit 56 will be described.
図14は油圧ショベル1側のコントローラ21における荷重演算部50,荷重積算可否判定部55及び荷重積算部56が実行する処理のフローチャートである。ここでは図14を用いて,荷重演算部50が運搬中のバケット内の作業対象物の荷重(第1の荷重)を確定し,荷重積算可否判定部55がその荷重(第1の荷重)を積算するか否か判定し(第3の判定),荷重積算部56が荷重を積算することで積載重量を出力する方法について説明する。 <Method of Determining Load of Work Object by
FIG. 14 is a flowchart of processing executed by the
図14のフローチャートは油圧ショベル1側のコントローラ21において予め定められたサンプリング周期で実行される。
The flowchart of FIG. 14 is executed at a predetermined sampling cycle in the controller 21 on the hydraulic shovel 1 side.
まず,ステップS140で荷重積算部56は,図6のステップS106でダンプトラック2から一定周期Δtvで出力されている積込作業判定の設定が切替わったか否か判定する。ここで積込作業判定に切替わりが無いと判定した場合はステップS142に進み,切替わりがあったと判定した場合はステップS141でダンプトラック2の積載重量をリセットし,ステップS142に進む。積込作業中と非積込作業中が切替わったタイミングで積載重量をリセットすることで,ダンプトラック2が積込作業中の期間のみの作業対象物の荷重の積算が可能になる。
First, in step S140, the load integration unit 56 determines whether or not the setting of the loading operation determination output from the dump truck 2 at a constant cycle Δtv in step S106 of FIG. 6 has been switched. If it is determined that there is no switch in the loading operation determination, the process proceeds to step S142. If it is determined that the switch is performed, the load weight of the dump truck 2 is reset in step S141, and the process proceeds to step S142. By resetting the loading weight at the timing when the loading operation is switched to the non-loading operation, the load of the work object can be integrated only during the loading operation of the dump truck 2.
ステップS142では,荷重演算部50は運搬判定部51から運搬動作の開始判定が出力されているか否かを監視する。運搬動作の開始判定が出力されている場合はステップS143に進み,そうでない場合はステップS140の前に戻り,積込作業判定部57の出力(積込作業判定の設定)を監視する。
In step S142, the load calculation unit 50 monitors whether or not the conveyance determination unit 51 has output a start determination of the conveyance operation. If the start determination of the transport operation is output, the process proceeds to step S143. If not, the process returns to step S140 to monitor the output of the loading operation determination unit 57 (setting of the loading operation determination).
ステップS143では,荷重演算部50は式(2)から(8)に関する演算を行って作業対象物の瞬時荷重Mlを演算し,ステップS144ではその瞬時荷重Mlをコントローラ21内に記録してステップS145に進む。
In step S143, the load calculation unit 50 calculates the instantaneous load Ml of the work object by performing calculations according to equations (2) to (8), and in step S144, records the instantaneous load Ml in the controller 21 and step S145. Go to
ステップS145では,荷重演算部50は運搬動作の開始判定の出力時(ステップS142でYESの判定がされた時点)から所定時間が経過しているか否か判定する。ここで所定時間が経過していないと判定した場合は,ステップS143の前に戻り,ステップS143とS144を再度実行する。所定時間の間ステップS143とS144を繰り返すことにより所定時間内に演算された複数の瞬時荷重Mlを記録できる。一方,所定時間が経過していると判定した場合はステップS146に進む。ステップS146では,荷重演算部50は所定時間内に記録された複数の瞬時荷重Mlの平均荷重を演算し,その平均荷重を作業対象物の荷重値(第1の荷重)としてステップS147に進む。
In step S145, the load calculation unit 50 determines whether or not a predetermined time has elapsed from the time of output of the start determination of the transportation operation (when YES is determined in step S142). If it is determined that the predetermined time has not elapsed, the process returns to the front of step S143, and steps S143 and S144 are executed again. By repeating steps S143 and S144 for a predetermined time, a plurality of instantaneous loads M1 calculated within the predetermined time can be recorded. On the other hand, if it is determined that the predetermined time has elapsed, the process proceeds to step S146. In step S146, the load calculation unit 50 calculates an average load of the plurality of instantaneous loads M1 recorded within the predetermined time, and the average load is used as a load value (first load) of the work object, and the process proceeds to step S147.
ステップS147では,荷重積算可否判定部55は,運搬判定部51から運搬動作の終了判定が出力されているか否か監視する。運搬動作の終了判定が出力されていないと判定した場合はステップS147の前に戻り,運搬動作の終了判定の監視を続行する。一方,運搬動作の終了判定が出力されていると判定した場合は,油圧ショベル1による積込動作が開始したとみなしてステップ148に進む。なお,ステップS147では運搬動作の終了判定に代えて,積込動作の開始判定を監視しても良い。
In step S147, the load integration availability determination unit 55 monitors whether or not the conveyance determination unit 51 has output a determination on the end of the conveyance operation. If it is determined that the transport operation end determination is not output, the process returns to the front of step S147, and monitoring of the transport operation end determination is continued. On the other hand, when it is determined that the transport operation end determination is output, it is considered that the loading operation by the hydraulic shovel 1 has started, and the process proceeds to step 148. In step S147, instead of the determination of the end of the transport operation, the determination of the start of the loading operation may be monitored.
ステップS148では,荷重積算可否判定部55は異常判定部58で異常判定がされているか否かを判定する。すなわちコントローラ21内部に保存されている異常判定の結果を参照して判定を行う。ここで異常判定がされていない場合(つまり正常判定が保存されている場合)はステップS149に進み,異常判定がされている場合(つまり異常判定が保存されている場合)はステップS151に進む。
In step S148, the load integration determination unit 55 determines whether the abnormality determination unit 58 determines that an abnormality has been made. That is, the determination is performed with reference to the result of the abnormality determination stored in the controller 21. Here, if the abnormality determination is not made (that is, the normal determination is stored), the process proceeds to step S149, and if the abnormality determination is performed (that is, the abnormality determination is stored), the process proceeds to step S151.
ステップS149では,荷重積算可否判定部55は油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたという判定(図8のステップS114で送信される積込判定)をダンプトラック2のコントローラ40から受信したか否か判定する。積込判定を受信したと判定した場合は,ステップS154で荷重積算部56がステップS145で算出した平均荷重をこれまでの積載重量(積算荷重)に積算してステップS155に進む。一方,ステップS149で積込判定の受信のない場合はステップS150に進む。
In step S149, the load accumulation determination unit 55 determines that loading of the work object onto the dump truck 2 by the hydraulic shovel 1 has been performed (loading determination transmitted in step S114 of FIG. 8). It is determined whether or not it has been received from the controller 40 of If it is determined that the loading determination has been received, the load integration unit 56 integrates the average load calculated in step S145 into the previous load weight (integrated load) in step S154, and the process proceeds to step S155. On the other hand, if it is determined in step S149 that no loading determination has been received, the process proceeds to step S150.
ステップS150では,荷重積算可否判定部55はステップS147の運搬動作の終了判定時から所定時間ΔTが経過しているか否か判定する。所定時間ΔTとしては,(1)油圧ショベル1が積込動作に要する時間から,(2)油圧ショベル1が積込作業に際して掘削,運搬,積込及びリーチングから成る一連の動作に要する時間までの間で任意の時間を設定できる。所定時間ΔTは積込作業に関する各オペレータの所要時間の傾向に合わせて入力装置23Bを介してオペレータが入力・決定しても良い。ステップS150で所定時間ΔTが経過していないと判定した場合はステップS148の前に戻って異常判定と積込判定を再度監視する。一方,所定時間ΔTが経過したと判定した場合は,油圧ショベル1が運搬動作を完了したが(積込動作を開始したが),ダンプトラック2の荷台36への作業対象物の積込はなされなかったとみなしてステップS154をスキップして(つまりステップS145の平均荷重を積算することなく)ステップS155に進む。ステップS150からステップS155に進む場合の具体例としては,油圧ショベル1がバケット15をダンプ動作させたが,その下方にダンプトラック2の荷台36が存在しなかったためダンプトラック2への作業対象物の積込に失敗した場合がある。
In step S150, the load integration availability determination unit 55 determines whether or not a predetermined time ΔT has elapsed from the determination of the end of the transport operation in step S147. As the predetermined time ΔT, (1) from the time required for the loading operation of the hydraulic shovel 1 to (2) from the time required for a series of operations consisting of digging, carrying, loading and reaching during the loading operation of the hydraulic shovel 1 You can set any time between them. The predetermined time ΔT may be input and determined by the operator via the input device 23B in accordance with the tendency of the required time of each operator regarding the loading operation. If it is determined in step S150 that the predetermined time ΔT has not elapsed, the process returns to step S148 to monitor abnormality determination and loading determination again. On the other hand, when it is determined that the predetermined time ΔT has elapsed, although the hydraulic shovel 1 has completed the transport operation (although the loading operation has been started), loading of the work object onto the loading platform 36 of the dump truck 2 is performed It is regarded that there is no, and step S154 is skipped (that is, the average load of step S145 is not integrated), and the process proceeds to step S155. As a specific example in the case of proceeding from step S150 to step S155, although the hydraulic shovel 1 dumps the bucket 15, there is no loading platform 36 for the dump truck 2 therebelow, and the work object to the dump truck 2 There are cases where loading has failed.
ステップS148で異常があったと判定した場合は,荷重積算可否判定部55はステップS151でシステム異常のため荷重の自動積算ができないことをオペレータに報知する警告表示とともにオペレータに対して積算要否を照会する照会表示を表示装置23Aに出力するよう指示し,これにより表示装置23Aに警告表示と照会表示が表示される(照会表示については後述の図15の照会表示部81を参照)。警告表示及び照会表示に対してオペレータが積算を希望する場合には入力装置23Bを介して積算要の指示を入力する。
If it is determined in step S148 that there is an abnormality, the load integration possibility determination unit 55 inquires the operator of the necessity for integration along with a warning display notifying the operator that the load can not be automatically integrated due to a system abnormality in step S151. The display unit 23A is instructed to output an inquiry display to be displayed, whereby a warning display and an inquiry display are displayed on the display unit 23A (for the inquiry display, refer to the inquiry display portion 81 in FIG. 15 described later). When the operator desires integration with respect to the warning display and the inquiry display, an instruction of integration required is input through the input device 23B.
続くステップS152では,荷重積算可否判定部55はオペレータから入力装置23Bを介して積算要の指示(本稿では「積算指示」と称することがある)が入力されたか否か判定する。ここでオペレータから積算指示があったと判定した場合は,荷重積算部56はステップS145で算出した平均荷重をこれまでの積載重量(積算荷重)に積算して(ステップS154)ステップS155に進む。一方,積算指示が無い場合はステップS153に進みステップS151の警告出力から所定時間が経過したか否か判定する。ステップS153で所定時間が経過していないと判定した場合はステップS152の前に戻って積算指示の入力の有無を再度監視する。一方,所定時間経過したと判定した場合はステップS154をスキップしてステップS155に進む。
In the subsequent step S152, the load integration availability determination unit 55 determines whether or not an instruction requiring integration (which may be referred to as “integration instruction” in this document) is input from the operator via the input device 23B. Here, when it is determined that the integration instruction has been issued from the operator, the load integration unit 56 integrates the average load calculated in step S145 into the load weight (accumulated load) obtained so far (step S154), and proceeds to step S155. On the other hand, when there is no integration instruction, the process proceeds to step S153, and it is determined whether a predetermined time has elapsed from the warning output of step S151. If it is determined in step S153 that the predetermined time has not elapsed, the process returns to step S152 to monitor again the presence or absence of the input of the integration instruction. On the other hand, when it is determined that the predetermined time has elapsed, the process skips step S154 and proceeds to step S155.
ステップS155では,荷重演算部50はステップS146で演算した平均荷重をリセットしてステップS140の前に戻る。
In step S155, the load calculation unit 50 resets the average load calculated in step S146 and returns to the step before step S140.
<表示装置23Aの表示画面>
図15は表示装置23Aの表示画面(出力画面)の外観図である。図15を用いて本実施形態の荷重計測システムにおける荷重計測結果の表示方法と,システムに異常がある場合の積算実施指示の方法について説明する。 <Display Screen ofDisplay Device 23A>
FIG. 15 is an external view of a display screen (output screen) of thedisplay device 23A. The display method of the load measurement result in the load measurement system of this embodiment and the method of integration execution instruction when there is an abnormality in the system will be described using FIG.
図15は表示装置23Aの表示画面(出力画面)の外観図である。図15を用いて本実施形態の荷重計測システムにおける荷重計測結果の表示方法と,システムに異常がある場合の積算実施指示の方法について説明する。 <Display Screen of
FIG. 15 is an external view of a display screen (output screen) of the
表示装置23Aはタッチパネルで構成されており,表示装置23Aの表示画面は,ダンプトラック2の目標積載重量(目標荷重値)を表示する目標荷重表示部70と,図14のS146で演算されたバケット15内の作業対象物の荷重値(瞬時荷重Mlの平均荷重値)を表示するバケット内荷重表示部72と,ステップS154で演算されたバケット15内の作業対象物の荷重値の積算値(ダンプトラック2の積算重量)を表示する合計荷重表示部71と,目標荷重表示部70に表示される値(目標積載重量)と合計荷重表示部71に表示される値(荷重値の積算値)の差分を表示する残り荷重表示部72と,積算した作業対象物の荷重値の履歴を数値と積み上げ縦棒グラフ(積算バー)で表示する積算バー表示部75と,ステップS151の照会表示(オペレータに対して積算要否を照会する表示)が表示される照会表示部81とを備えている。
The display device 23A is configured by a touch panel, and the display screen of the display device 23A displays a target load display unit 70 that displays the target loading weight (target load value) of the dump truck 2, and the bucket calculated in S146 of FIG. Internal load value display unit 72 for displaying the load value (average load value of instantaneous load Ml) of the work object in 15 and the integrated value of the load value of the work object in the bucket 15 calculated in step S154 (dump Of the total load display section 71 displaying the integrated weight of the truck 2), the value displayed on the target load display section 70 (target load weight), and the value displayed on the total load display section 71 (integrated value of load values) Remaining load display unit 72 for displaying the difference, integration bar display unit 75 for displaying the accumulated load value history of the work object as a numerical value and a vertical bar graph (integration bar), and step S15 Display of the query (display to display the accumulated necessity for an operator) is a query display section 81 displayed.
バケット内荷重表示部72の値は,図14のステップS146で演算された最新の値に更新され,ステップS155でリセットされると0に更新される。合計荷重表示部71の値と積算バー表示部75の表示は,ステップS154が実施されると最新の値に更新され,ステップS141でリセットされると0に更新される。
The value of the in-bucket load display unit 72 is updated to the latest value calculated in step S146 of FIG. 14 and is updated to 0 when reset in step S155. The value of the total load display unit 71 and the display of the integration bar display unit 75 are updated to the latest values when step S154 is performed, and are updated to 0 when reset in step S141.
照会表示部81には,システム異常が検出された場合にステップS151でオペレータに積載の要否を問い合わせる照会表示83が表示される。照会表示部81には,オペレータが積算を希望する場合に押下されるボタンである積算指示入力部82が照会表示83とともに表示される。積算指示入力部82が押下されると荷重積算可否判定部55はステップS152で積算指示の入力があったと判定する。一方,積算指示入力部82が押下されない場合はステップS154の積算は実施されない。なお,図15の例では,ステップS151で警告表示が出力されたタイミングからステップS153の所定時間が経過するまでの残り時間(図15では5秒となっている)を照会表示83と合わせて照会表示部81に表示し,残り時間がゼロに達した場合(すなわちステップS153の所定時間が経過した場合)は照会表示部81内の表示が消えるように構成されている。
When the system abnormality is detected, the inquiry display unit 81 displays an inquiry display 83 inquiring of the operator whether or not the loading is necessary in step S151. In the inquiry display unit 81, an integration instruction input unit 82, which is a button pressed when the operator desires integration, is displayed together with the inquiry display 83. When the integration instruction input unit 82 is pressed, the load integration determination unit 55 determines in step S152 that the integration instruction has been input. On the other hand, when the integration instruction input unit 82 is not pressed, the integration in step S154 is not performed. In the example of FIG. 15, the remaining time (5 seconds in FIG. 15) from the timing at which the warning display is output in step S151 to the elapse of the predetermined time in step S153 is referred to It is configured to display on the display unit 81, and when the remaining time reaches zero (ie, when the predetermined time in step S153 has elapsed), the display in the inquiry display unit 81 disappears.
<動作>
(1)正常判定の場合
次に上記のように構成される荷重計測システムの動作を説明する。はじめに油圧ショベル1のコントローラ21の異常判定部58で正常判定(図11:ステップS136)がされている場合について説明する。 <Operation>
(1) Case of Normal Determination Next, the operation of the load measurement system configured as described above will be described. First, the case where theabnormality determination unit 58 of the controller 21 of the hydraulic shovel 1 performs the normal determination (FIG. 11: step S136) will be described.
(1)正常判定の場合
次に上記のように構成される荷重計測システムの動作を説明する。はじめに油圧ショベル1のコントローラ21の異常判定部58で正常判定(図11:ステップS136)がされている場合について説明する。 <Operation>
(1) Case of Normal Determination Next, the operation of the load measurement system configured as described above will be described. First, the case where the
上記のように構成される実施形態において,空荷のダンプトラック2が油圧ショベル1から作業対象物の積込を受けるために停車すると,コントローラ40の積込作業判定部57は積込作業判定を非積込作業中から積込作業中に変更し(図6:ステップS102,S103)その結果を油圧ショベル1のコントローラ21に送信する(図6:ステップS106)。
In the embodiment configured as described above, when the empty dump truck 2 stops to receive the loading of the work object from the hydraulic shovel 1, the loading operation determination unit 57 of the controller 40 determines the loading operation. It changes during the loading operation from the non-loading operation (FIG. 6: steps S102, S103) and transmits the result to the controller 21 of the hydraulic shovel 1 (FIG. 6: step S106).
積込作業判定結果を受信した油圧ショベル1のコントローラ21は積込作業判定結果が切り替わったことを認識して積載重量をリセットし(図14:ステップS140,141),油圧ショベル1が運搬動作を開始するか否かの監視を開始する(図14:ステップ142)。油圧ショベル1が掘削動作のためにアーム14のクラウド動作を開始すると掘削に伴う負荷によりアームシリンダ17のボトム圧が閾値1を越え,その後,掘削動作が終了して負荷が軽くなるとアームシリンダ17のボトム圧が閾値2を下回る。このときコントローラ21の運搬判定部51は油圧ショベル1が運搬動作を開始したことを示す判定を出力する(図10:ステップS122)。
The controller 21 of the hydraulic shovel 1 having received the loading work judgment result recognizes that the loading work judgment result has been switched, resets the loading weight (FIG. 14: steps S140 and 141), and the hydraulic shovel 1 carries out the transport operation. Monitoring of whether or not to start is started (FIG. 14: step 142). When the hydraulic shovel 1 starts the cloud operation of the arm 14 for the digging operation, the load associated with the digging causes the bottom pressure of the arm cylinder 17 to exceed the threshold 1 and then the digging operation is completed and the load is reduced. The bottom pressure is below threshold 2. At this time, the conveyance determination unit 51 of the controller 21 outputs a determination indicating that the hydraulic shovel 1 has started the conveyance operation (FIG. 10: step S122).
運搬判定部51から運搬動作の開始判定が出力されると,コントローラ21の荷重積算部56はバケット15内の作業対象物の瞬時荷重Mlの演算・記録を所定時間の間繰り返し行い,その所定時間に演算した瞬時荷重Mlの平均荷重値を作業対象物の荷重値とする(図14:ステップS143-146)。すなわち,作業対象物の荷重値の算出は油圧ショベル1の運搬動作中に行われる。
When the start determination of the transport operation is output from the transport determination unit 51, the load integration unit 56 of the controller 21 repeatedly calculates and records the instantaneous load Ml of the work object in the bucket 15 for a predetermined time, and the predetermined time The average load value of the instantaneous load Ml calculated in is taken as the load value of the work object (FIG. 14: steps S143-146). That is, the calculation of the load value of the work object is performed during the transportation operation of the hydraulic shovel 1.
運搬動作によりバケット15をダンプトラック2の荷台の上方まで移動させた油圧ショベル1は積込動作を開始するためにバケット15のダンプ動作を開始する。このときアーム-バケット相対角度が閾値3を越え,コントローラ21の運搬判定部51は油圧ショベル1が運搬動作を終了したことを示す判定を出力する(図10:ステップS124)。このように運搬判定部51から運搬動作の終了判定が出力されたことは,油圧ショベル1が積込動作を開始したことを示し,間もなく油圧ショベル1によりダンプトラック2の荷台36に作業対象物が投入されることを示す。
The hydraulic shovel 1 having moved the bucket 15 to the upper side of the loading platform of the dump truck 2 by the transporting operation starts the dumping operation of the bucket 15 to start the loading operation. At this time, the arm-bucket relative angle exceeds the threshold value 3, and the conveyance determination unit 51 of the controller 21 outputs a determination indicating that the hydraulic shovel 1 has completed the conveyance operation (FIG. 10: step S124). The fact that the transport determination unit 51 outputs the end determination of the transport operation in this way indicates that the hydraulic shovel 1 has started the loading operation, and the hydraulic shovel 1 will soon be the work object on the loading platform 36 of the dump truck 2 Indicates that it will be injected.
油圧ショベル1のコントローラ21は,異常判定部58による判定結果が正常判定の場合,運搬判定部51からの運搬動作の終了判定の出力をトリガーとして,ダンプトラック2のコントローラ40から積込判定が入力されるか否かの監視を開始する(図14:ステップS149)。油圧ショベル1の積込動作によりダンプトラック2が油圧ショベル1から作業対象物の積込を正常に受けると,その荷重によりダンプトラック2のサスペンション38a―38dの圧力が増加し,その結果,コントローラ40は積込判定を油圧ショベル1のコントローラ21に対して送信する(図8:ステップS114)。
The controller 21 of the hydraulic shovel 1 receives the loading determination input from the controller 40 of the dump truck 2 using the output of the transport operation determination from the transport determining unit 51 as a trigger when the determination result by the abnormality determining unit 58 is normal determination. It is started to monitor whether or not it is received (FIG. 14: step S149). When the dump truck 2 receives loading of the work object from the hydraulic shovel 1 normally by the loading operation of the hydraulic shovel 1, the pressure of the suspensions 38a to 38d of the dump truck 2 increases due to the load, and as a result, the controller 40 Sends a loading determination to the controller 21 of the hydraulic shovel 1 (FIG. 8: step S114).
コントローラ21はダンプトラック2からの積込判定の受信を確認すると,先に演算した瞬時荷重Mlの平均荷重値を積算してダンプトラック2の積載重量を算出する。初回の積み込み時の積載重量は平均荷重値となる。積載重量の算出結果は油圧ショベル1の表示装置23Aの合計荷重表示部71に表示される(図15)。2回目以降の積込動作についても,油圧ショベル1からダンプトラック2への積込が正常に行われば上記と同じ処理が繰り返され,荷重演算部50で算出された作業対象物の荷重値が積載重量に積算される。
When the controller 21 confirms the reception of the loading determination from the dump truck 2, the controller 21 integrates the average load value of the instantaneous load Ml calculated above to calculate the loading weight of the dump truck 2. The loading weight at the first loading is the average load value. The calculation result of the load weight is displayed on the total load display section 71 of the display device 23A of the hydraulic shovel 1 (FIG. 15). Also in the second and subsequent loading operations, if loading from the hydraulic shovel 1 to the dump truck 2 is normally performed, the same processing as described above is repeated, and the load value of the work object calculated by the load calculation unit 50 is It is integrated to the load weight.
一方,油圧ショベル1は積込動作を行ったが,バケット15の下方にダンプトラック2の荷台が存在せず,ダンプトラック2への作業対象物の積込を失敗した場合には,運搬判定部51からの運搬動作の終了判定から所定時間ΔTが経過してもダンプトラック2のコントローラ40から積込判定が送信されない。この場合,油圧ショベル1のコントローラ21は,油圧ショベル1は積込動作をしたものの何らかの事情でダンプトラック2への積込が失敗したとみなして,今回の積込動作に伴う作業対象物の荷重値の積算はキャンセルし,運搬動作中に演算した作業対象物の荷重値をリセットして次の運搬動作の開始判定が出力されることを待つ。
On the other hand, when the hydraulic shovel 1 performs the loading operation but the loading platform of the dump truck 2 does not exist below the bucket 15 and the loading of the work object onto the dump truck 2 fails, the transport determination unit Even if the predetermined time ΔT has elapsed since the determination of the end of the transport operation from 51, the loading determination is not transmitted from the controller 40 of the dump truck 2. In this case, the controller 21 of the hydraulic shovel 1 carries out the loading operation of the hydraulic shovel 1, but considers that loading on the dump truck 2 has failed for some reason, and the load of the work object associated with the loading operation this time The integration of the values is canceled, the load value of the work object calculated during the transport operation is reset, and it is waited until the next start judgment of the transport operation is output.
(2)異常判定の場合
次に油圧ショベル1のコントローラ21の異常判定部58で異常判定(図11:ステップS137)がされている場合について説明する。この場合も,油圧ショベル1の運搬動作の終了までの流れは正常判定のとき同じなので説明は省略する。 (2) In Case of Abnormality Determination Next, the case where abnormality determination (FIG. 11: step S137) is made by theabnormality determination unit 58 of the controller 21 of the hydraulic excavator 1 will be described. Also in this case, the flow until the end of the carrying operation of the hydraulic shovel 1 is the same as in the case of normality determination, so the description will be omitted.
次に油圧ショベル1のコントローラ21の異常判定部58で異常判定(図11:ステップS137)がされている場合について説明する。この場合も,油圧ショベル1の運搬動作の終了までの流れは正常判定のとき同じなので説明は省略する。 (2) In Case of Abnormality Determination Next, the case where abnormality determination (FIG. 11: step S137) is made by the
油圧ショベル1のコントローラ21(異常判定部58)による判定結果が異常判定の場合,2つのコントローラ21,40間の通信異常,ダンプトラック2のサスペンション圧センサ39の異常,または荷重値の演算異常の可能性がある。この場合,正常判定のときのように作業対象物の荷重値を自動的に積算することはできないため,表示装置23Aに警告表示と照会表示83を出力する(図14:ステップS151)。これによりシステム異常が発生して作業対象物の荷重値の積算値を自動算出できないことを油圧ショベル1のオペレータに認識させることができる。
When the judgment result by the controller 21 (abnormality judgment unit 58) of the hydraulic shovel 1 is abnormality judgment, communication abnormality between the two controllers 21, 40, abnormality of the suspension pressure sensor 39 of the dump truck 2, or calculation abnormality of the load value there is a possibility. In this case, since the load value of the work object can not be automatically integrated as in the normality determination, a warning display and an inquiry display 83 are output to the display device 23A (FIG. 14: step S151). Thus, the operator of the hydraulic shovel 1 can be made aware that a system abnormality has occurred and the integrated value of the load value of the work object can not be calculated automatically.
このとき,積算指示入力部82が照会表示83とともに表示装置23Aに表示される。積算を希望する場合には油圧ショベル1のオペレータは,積算指示入力部82を介して積算指示をコントローラ21に入力する。積算指示が入力されると,コントローラ21は,正常判定の場合と同様に先に演算した瞬時荷重Mlの平均荷重値を積算してダンプトラック2の積載重量を算出する。これにより,2つのコントローラ21,40間の通信異常やダンプトラック2のサスペンション圧センサ39の異常が発生した場合でも積載重量を算出することができる。
At this time, the integration instruction input unit 82 is displayed on the display device 23A together with the inquiry display 83. When integration is desired, the operator of the hydraulic shovel 1 inputs an integration instruction to the controller 21 via the integration instruction input unit 82. When the integration instruction is input, the controller 21 integrates the average load value of the instantaneous load Ml previously calculated in the same manner as in the case of the normality determination to calculate the loading weight of the dump truck 2. As a result, even when a communication abnormality between the two controllers 21 and 40 or an abnormality of the suspension pressure sensor 39 of the dump truck 2 occurs, the load weight can be calculated.
<効果>
以上のように,本実施形態では,ダンプトラック2のコントローラ40(積込判定部52)と油圧ショベル1のコントローラ21(運搬判定部51)のそれぞれが油圧ショベル1からダンプトラック2に対して積込が行われたか否かを判定し,その両方の判定結果に基づいて油圧ショベル1のコントローラ21(荷重積算可否判定部55)がバケット内の作業対象物の荷重値の積算の可否を判定し,その判定結果に基づいて油圧ショベル1のコントローラ21(荷重積算部56)が当該荷重値の積算することとした。このようにシステムを構成すると,油圧ショベル1からダンプトラック2に作業対象物が積み込まれたことが誤りなく検出されるので,ダンプトラック2への積込量(ダンプトラック2の積載重量)を正確に算出できる。 <Effect>
As described above, in the present embodiment, each of the controller 40 (loading determination unit 52) of thedump truck 2 and the controller 21 (transport determining unit 51) of the hydraulic shovel 1 It is determined whether the loading has been performed, and the controller 21 (load integration availability determination unit 55) of the hydraulic shovel 1 determines the availability of integration of the load value of the work object in the bucket based on both determination results. The controller 21 (load integration unit 56) of the hydraulic excavator 1 integrates the load value based on the determination result. When the system is configured in this way, loading of the work object from the hydraulic shovel 1 onto the dump truck 2 is detected without error, so the loading amount on the dump truck 2 (loading weight of the dump truck 2) is accurate It can be calculated to
以上のように,本実施形態では,ダンプトラック2のコントローラ40(積込判定部52)と油圧ショベル1のコントローラ21(運搬判定部51)のそれぞれが油圧ショベル1からダンプトラック2に対して積込が行われたか否かを判定し,その両方の判定結果に基づいて油圧ショベル1のコントローラ21(荷重積算可否判定部55)がバケット内の作業対象物の荷重値の積算の可否を判定し,その判定結果に基づいて油圧ショベル1のコントローラ21(荷重積算部56)が当該荷重値の積算することとした。このようにシステムを構成すると,油圧ショベル1からダンプトラック2に作業対象物が積み込まれたことが誤りなく検出されるので,ダンプトラック2への積込量(ダンプトラック2の積載重量)を正確に算出できる。 <Effect>
As described above, in the present embodiment, each of the controller 40 (loading determination unit 52) of the
また,油圧ショベル1のコントローラ21(運搬判定部51)で積込が行われたと判定されてから所定時間ΔTが経過してもダンプトラック2のコントローラ40(積込判定部52)で積込が行われたと判定されない場合には,油圧ショベル1のコントローラ21は,油圧ショベル1は積込動作をしたものの何らかの事情でダンプトラック2への積込が失敗したとみなして,その積込動作に伴う作業対象物の荷重値の積算はキャンセルして油圧ショベル1の次の運搬動作及びそれに伴う荷重値の演算並びに積込動作を待つように構成されている。そのため,ダンプトラック2への積込が失敗してもそのことを油圧ショベル1のオペレータをはじめとする人間がコントローラ21に入力することなく荷重値の積算処理を継続することができる。
Also, even if a predetermined time ΔT has elapsed since it was determined that loading was performed by the controller 21 (the transport determination unit 51) of the hydraulic shovel 1, loading is performed by the controller 40 (loading determination unit 52) of the dump truck 2 When it is not determined that the operation has been performed, the controller 21 of the hydraulic shovel 1 considers that the loading onto the dump truck 2 has failed due to any circumstances although the hydraulic shovel 1 has performed the loading operation, and the loading operation is involved The integration of the load value of the work object is canceled and the next transport operation of the hydraulic shovel 1 and the calculation of the load value accompanying it and the loading operation are awaited. Therefore, even if loading of the dump truck 2 fails, it is possible for the operator of the hydraulic shovel 1 and the like to continue the load value integration processing without inputting the load to the controller 21.
また,システムに異常が発生した場合に照会表示83を表示装置23Aに表示することで,システム異常の場合のみ荷重値の積算の指示を手動にしているので,正常時は荷重値の積算に関するオペレータの操作負担を軽減できる。またこのように構成することで異常が発生した場合にも荷重値の積算を継続することができる。
In addition, by displaying the inquiry display 83 on the display device 23A when an abnormality occurs in the system, the load value integration instruction is manually made only in the case of the system abnormality. You can reduce the operation burden of In addition, with this configuration, integration of load values can be continued even when an abnormality occurs.
<その他>
なお,本発明は,上記の実施の形態に限定されるものではなく,その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば,本発明は,上記の実施の形態で説明した全ての構成を備えるものに限定されず,その構成の一部を削除したものも含まれる。また,ある実施の形態に係る構成の一部を,他の実施の形態に係る構成に追加又は置換することが可能である。 <Others>
The present invention is not limited to the above-described embodiment, and includes various modifications within the scope of the present invention. For example, the present invention is not limited to the one provided with all the configurations described in the above embodiment, but also includes one in which a part of the configuration is deleted. In addition, part of the configuration according to one embodiment can be added to or replaced with the configuration according to another embodiment.
なお,本発明は,上記の実施の形態に限定されるものではなく,その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば,本発明は,上記の実施の形態で説明した全ての構成を備えるものに限定されず,その構成の一部を削除したものも含まれる。また,ある実施の形態に係る構成の一部を,他の実施の形態に係る構成に追加又は置換することが可能である。 <Others>
The present invention is not limited to the above-described embodiment, and includes various modifications within the scope of the present invention. For example, the present invention is not limited to the one provided with all the configurations described in the above embodiment, but also includes one in which a part of the configuration is deleted. In addition, part of the configuration according to one embodiment can be added to or replaced with the configuration according to another embodiment.
ダンプトラック2の積込作業の判定方法は図6及び図7に示す方法に限定されるものではない。図16および図17は上記の実施形態と異なるダンプトラック2の積込作業の判定方法を行うシステムの説明図である。図16はその荷重計測システムのシステム構成を示し,図17は図16のシステムによるダンプトラック2の積込作業の判定方法の説明図である。ダンプトラック2はGPSアンテナ38を備え,コントローラ40内部にはGPSアンテナ38からの入力信号を基にダンプトラック2の絶対位置を演算する運搬機械位置演算部66を備え,油圧ショベル1のコントローラ21に運搬機械位置演算部66で算出した自車位置を送信するように構成されている。また,油圧ショベル1はGPSアンテナ38を備え,コントローラ21内部にはGPSアンテナ38からの入力信号を基に油圧ショベル1の絶対位置を演算する積込機械位置演算部65と,積込機械位置演算部65及び運搬機械位置演算部66から入力される油圧ショベル1とダンプトラック2の位置情報(相対距離)に基づいてダンプトラック2の積込作業状態を判定する積込作業判定部57を備える。積込作業判定部57は,図18に示すようにダンプトラック2が油圧ショベル1から破線で示した所定の距離以内の位置に存在すると判定した場合は積込作業判定を積込作業中と設定し,ダンプトラック2が当該所定の距離より離れた位置に存在すると判定した場合は積込作業判定を非積込作業中と設定する。このようにシステムを構成しても上記の実施形態と同様の効果を発揮することができる。
The determination method of the loading operation of the dump truck 2 is not limited to the method shown in FIG. 6 and FIG. FIG. 16 and FIG. 17 are explanatory views of a system that performs the loading work determination method of the dump truck 2 different from the above embodiment. FIG. 16 shows the system configuration of the load measuring system, and FIG. 17 is an explanatory view of the method of determining the loading operation of the dump truck 2 by the system of FIG. The dump truck 2 includes a GPS antenna 38. The controller 40 includes a transport machine position calculation unit 66 that calculates the absolute position of the dump truck 2 based on an input signal from the GPS antenna 38. The vehicle position calculated by the transport machine position calculation unit 66 is configured to be transmitted. The hydraulic shovel 1 also has a GPS antenna 38, and the controller 21 has a loading machine position calculation unit 65 for calculating the absolute position of the hydraulic shovel 1 based on an input signal from the GPS antenna 38, and loading machine position calculation The loading work determination unit 57 that determines the loading work state of the dump truck 2 based on the position information (relative distance) of the hydraulic shovel 1 and the dump truck 2 input from the unit 65 and the transport machine position calculation unit 66 is provided. The loading operation determination unit 57 sets the loading operation determination as loading operation when it is determined that the dump truck 2 is present at a position within a predetermined distance indicated by a broken line from the hydraulic shovel 1 as shown in FIG. If it is determined that the dump truck 2 is present at a position separated from the predetermined distance, the loading operation determination is set as non-loading operation. Even if the system is configured as described above, the same effect as that of the above embodiment can be exhibited.
図14のフローチャートに関して,ステップS150でYESと判定されたとき,ステップS155に進むことに代えて,ステップS151に進むように構成しても良い。この場合のステップS151以降の処理は図14の通りとする。ステップS150でYESと判定されたときはダンプトラック2への積込が失敗したと考えられる。そこで,表示装置23Aに警告表示と照会表示をすることで,油圧ショベル1で再度の積込を行った後に積算指示を入力することをオペレータに促すものとする。このように構成すると,積込の失敗に起因して積算が中断していることをオペレータに認識させることができるとともに,積算指示をトリガーにして積込失敗前の自動積算が可能な状態に復帰することができる。
With regard to the flowchart of FIG. 14, when YES is determined in step S150, the process may be configured to proceed to step S151 instead of proceeding to step S155. The process after step S151 in this case is as shown in FIG. If YES is determined in step S150, it is considered that the loading on the dump truck 2 has failed. Therefore, by displaying the warning display and the inquiry display on the display device 23A, the operator is prompted to input the accumulation instruction after the hydraulic shovel 1 performs the loading again. According to this configuration, the operator can recognize that the integration is interrupted due to the loading failure, and return to the state where the automatic integration before the loading failure can be triggered by the integration instruction. can do.
図14のステップS151に関して,本実施形態では,異常判定がされた場合はその原因に依らず警告表示と照会表示83を表示装置23Aに行うものとして説明したが,コントローラ21又はコントローラ40の荷重算出に異常がある場合(具体的には図12のステップS135でNOと判定された場合)には作業対象物の荷重値に誤りがある可能性がある。そのため,この場合には照会表示83を行わずに異常表示のみを行うようにシステムを構成し,オペレータの積算指示によって誤った荷重値が積算されることを防止しても良い。
With regard to step S 151 of FIG. 14, in the present embodiment, when abnormality determination is performed, it has been described that warning display and inquiry display 83 are performed on the display device 23A regardless of the cause. There is a possibility that the load value of the work object has an error if there is an abnormality in (in particular, it is determined as NO in step S135 of FIG. 12). Therefore, in this case, the system may be configured to perform only the abnormality display without performing the inquiry display 83, and may prevent the erroneous load value from being integrated by the operator's integration instruction.
上記の実施形態では油圧ショベル1側のコントローラ21に異常判定部58を設けたがこれは省略可能である。異常判定部58を省略した場合,図14のフローチャートのステップS148でYESと判定されたときはステップS149に進むように構成し,ステップS150でNOと判定されたときにはステップS149に戻るように構成すれば良い。
Although the abnormality determination unit 58 is provided in the controller 21 of the hydraulic excavator 1 in the above embodiment, this can be omitted. When the abnormality determination unit 58 is omitted, the process proceeds to step S149 when YES is determined in step S148 of the flowchart of FIG. 14, and the process is returned to step S149 when NO is determined in step S150. Just do it.
また,本発明の荷重計測システムの構成は図5に示したものに限定されるものではない。例えば積込判定部52は,ダンプトラック2のコントローラ40の中に実装される必要はなく,サスペンション圧センサ39a-39dの信号を送受信部53に入力して,無線送受信機42から直接油圧ショベル1に送信することで,積込判定部52で行われる演算処理に相当する処理を油圧ショベル1のコントローラ21で実施するように構成しても良い。
Further, the configuration of the load measurement system of the present invention is not limited to that shown in FIG. For example, the loading determination unit 52 does not have to be mounted in the controller 40 of the dump truck 2 and inputs signals of the suspension pressure sensors 39a to 39d to the transmitting and receiving unit 53 to directly transmit the hydraulic excavator 1 from the wireless transceiver 42 The controller 21 of the hydraulic shovel 1 may execute the processing corresponding to the arithmetic processing performed by the loading determination unit 52 by transmitting the information.
瞬時荷重Mlの演算は図13に示すモデルに限定されるものではなく,上記で説明したものと異なる演算式を用いても良い。例えば,ブーム13,アーム14,バケット15により構成されるフロント作業機12の運動方程式を用いて瞬時荷重を演算してもよい。
The calculation of the instantaneous load Ml is not limited to the model shown in FIG. 13, and an arithmetic expression different from that described above may be used. For example, the instantaneous load may be calculated using the equation of motion of the front working unit 12 configured by the boom 13, the arm 14, and the bucket 15.
作業対象物の荷重値の算出方法は,図14に示す手法に限定されるものではない。例えば旋回角速度の大きさやバケット15の位置を用いて荷重を平均化する期間を決定しても良い。
The method of calculating the load value of the work object is not limited to the method shown in FIG. For example, the period during which the load is averaged may be determined using the magnitude of the turning angular velocity or the position of the bucket 15.
ダンプトラック2の積込判定は図8および図9に示した内容に限定されるものではない。例えばベッセル36,または車体に加速度センサを取り付け,作業対象物がベッセル36に投入されることで生じる上下方向の加速度の変化を当該加速度センサで検出して積込判定を出力するように構成してもよい。
The loading determination of the dump truck 2 is not limited to the contents shown in FIGS. 8 and 9. For example, an acceleration sensor is attached to the vessel 36 or the vehicle body, and a change in acceleration in the vertical direction that occurs when the work object is thrown into the vessel 36 is detected by the acceleration sensor to output a loading determination. It is also good.
表示装置23Aの表示内容は図15に限定されるものではない。例えば,ダンプトラック容量に対する積算荷重の割合をパーセント表示しても良く,過去の積込量(積載重量)の履歴を並べて表示する部分を表示画面上に設けても良い。
The display content of the display device 23A is not limited to FIG. For example, the ratio of the integrated load to the dump truck capacity may be displayed as a percentage, or a portion may be provided on the display screen in which the history of the past loading amount (loading weight) is arranged and displayed.
上記のコントローラ40とコントローラ21に係る各構成や当該各構成の機能及び実行処理等は、それらの一部又は全部をハードウェア(例えば各機能を実行するロジックを集積回路で設計する等)で実現しても良い。また、上記のコントローラ40,21に係る構成は、演算処理装置(例えばCPU)によって読み出し・実行されることで当該コントローラ40,21の構成に係る各機能が実現されるプログラム(ソフトウェア)としてもよい。当該プログラムに係る情報は、例えば、半導体メモリ(フラッシュメモリ、SSD等)、磁気記憶装置(ハードディスクドライブ等)及び記録媒体(磁気ディスク、光ディスク等)等に記憶することができる。
The components of the controller 40 and the controller 21 and the functions and execution processes of the components are realized by hardware (for example, designing logic for executing each function by an integrated circuit). You may. Further, the configuration according to the controllers 40 and 21 may be a program (software) in which each function according to the configuration of the controllers 40 and 21 is realized by being read and executed by an arithmetic processing unit (for example, a CPU). . The information related to the program can be stored, for example, in a semiconductor memory (flash memory, SSD, etc.), a magnetic storage device (hard disk drive, etc.), a recording medium (magnetic disk, optical disc, etc.), and the like.
1…油圧ショベル,2…ダンプトラック,12…フロント作業機,13…ブーム,14…アーム,15…バケット,16…ブームシリンダ,17…アームシリンダ,18…バケットシリンダ,21…コントローラ(積込機械側コントローラ),23…外部入出力器,23A…表示装置,23B…入力装置,24…ブーム角度センサ,25…アーム角度センサ,26…バケット角度センサ,27…旋回角速度センサ,28…傾斜角度センサ,29…ブームボトム圧センサ,30…ブームロッド圧センサ,31…アームボトム圧センサ,32…アームロッド圧センサ,33…無線送受信機,36…荷台,38…サスペンション,39…サスペンション圧センサ,40…コントローラ(運搬機械側コントローラ),41…表示装置,42…無線送受信機,43…車速センサ,50…荷重演算部,51…運搬判定部,52…積込判定部,53…送受信部,54…送受信部,55…荷重積算可否判定部,56…荷重積算部,57…積込作業判定部,58…異常判定部,70…目標荷重表示部,71…合計荷重表示部,72…荷重表示部,81…照会表示部,82…積算指示入力部,83…照会表示
DESCRIPTION OF SYMBOLS 1 ... hydraulic shovel, 2 ... dump truck, 12 ... front working machine, 13 ... boom, 14 ... arm, 15 ... bucket, 16 ... boom cylinder, 17 ... arm cylinder, 18 ... bucket cylinder, 21 ... controller (loading machine Side controller), 23 ... external input / output unit, 23A ... display device, 23B ... input device, 24 ... boom angle sensor, 25 ... arm angle sensor, 26 ... bucket angle sensor, 27 ... turning angular velocity sensor, 28 ... inclination angle sensor , 29 ... Boom bottom pressure sensor, 30 ... Boom rod pressure sensor, 31 ... Arm bottom pressure sensor, 32 ... Arm rod pressure sensor, 33 ... Wireless transceiver, 36 ... Carrier bed, 38 ... Suspension, 39 ... Suspension pressure sensor, 40 ... controller (transporter side controller), 41 ... display device, 42 ... wireless transmission Receiver, 43: Vehicle speed sensor, 50: Load calculation unit, 51: Transport determination unit, 52: Load determination unit, 53: Transmission and reception unit, 54: Transmission and reception unit, 55: Load integration availability determination unit, 56: Load integration unit , 57 ... loading operation determination unit, 58 ... abnormality determination unit, 70 ... target load display unit, 71 ... total load display unit, 72 ... load display unit, 81 ... inquiry display unit, 82 ... integration instruction input unit, 83 ... Display inquiry
Claims (6)
- 油圧ポンプから吐出される圧油によって駆動される油圧シリンダと,前記油圧シリンダによって駆動される作業機と,前記作業機により運搬機械に積み込まれた作業対象物の積載重量を演算するコントローラとを備えた油圧ショベルにおいて,
前記コントローラは,
前記作業機の姿勢に基づいて前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたか否かを判定する第1の判定を行い,
前記油圧シリンダの推力と前記第1の判定の判定結果とに基づいて前記油圧ショベルにより前記運搬機械へ積込まれた作業対象物の荷重である第1の荷重を演算し,
前記運搬機械に備えられた運搬機械側コントローラから送信された前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたか否かを判定する第2の判定の判定結果と前記第1の判定の判定結果とに基づいて前記第1の荷重を積算するか否かを判定する第3の判定を行い,
前記第3の判定により前記第1の荷重を積算すると判定された場合に前記第1の荷重を積算することで前記運搬機械の積載重量を演算すること
を特徴とする油圧ショベル。 It has a hydraulic cylinder driven by pressure oil discharged from a hydraulic pump, a work machine driven by the hydraulic cylinder, and a controller for calculating the load weight of the work object loaded in the transport machine by the work machine In a hydraulic excavator,
The controller is
A first determination is performed to determine whether loading of the work object onto the transport machine by the hydraulic shovel has been performed based on the posture of the work machine,
A first load, which is a load of the work object loaded into the transport machine by the hydraulic shovel, is calculated based on the thrust of the hydraulic cylinder and the determination result of the first determination;
A determination result of a second determination that determines whether loading of a work object onto the transport machine by the hydraulic shovel has been transmitted from a transport machine-side controller included in the transport machine and the first determination A third determination is performed to determine whether to integrate the first load based on the determination result of the determination of
The hydraulic shovel characterized by calculating the loading weight of the said conveyance machine by integrating | accumulating the said 1st load, when it determines with integrating | accumulating the said 1st load by said 3rd determination. - 請求項1の油圧ショベルにおいて,
前記コントローラは,前記第1の判定により前記運搬機械への作業対象物の積込が行われたと判定された時から所定時間内に,前記第2の判定により前記運搬機械への作業対象物の積込が行われたという判定結果を前記運搬機械側コントローラから受信した場合,前記第1の荷重を積算すること
を特徴とする油圧ショベル。 In the hydraulic shovel of claim 1,
The controller is configured to, according to the second determination, set the work object to the transport machine within a predetermined time from when it is determined that the loading of the work object to the transport machine is performed according to the first determination. The hydraulic shovel, wherein the first load is integrated when the determination result that loading has been performed is received from the transport machine side controller. - 請求項1の油圧ショベルにおいて,
前記コントローラは,
前記作業機の姿勢に基づいて,前記運搬機械に対する前記油圧ショベルの運搬動作の開始と終了を判定する第4の判定を行い,
前記第4の判定により前記運搬動作の開始から終了までの間の前記油圧シリンダの推力に基づいて前記第1の荷重を演算し,
前記第4の判定により前記運搬動作が終了したと判定され,かつ,前記第2の判定により前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたと判定されたという判定結果を前記運搬機械側コントローラから受信した場合,前記第1の荷重を積算すること
を特徴とする油圧ショベル。 In the hydraulic shovel of claim 1,
The controller is
A fourth determination is performed to determine the start and end of the transport operation of the hydraulic shovel with respect to the transport machine based on the posture of the work machine,
The first load is calculated based on the thrust of the hydraulic cylinder from the start to the end of the transport operation according to the fourth determination;
It is determined that it is determined that the transporting operation has ended by the fourth determination, and that it is determined that loading of the work object onto the transporting machine by the hydraulic shovel has been performed by the second determination. The hydraulic shovel, wherein the first load is integrated when it is received from the transport machine side controller. - 請求項1の油圧ショベルにおいて,
操作者からの指示を入力するための入力装置と,所定の情報を表示するための表示装置とをさらに有し,
前記コントローラは,
前記運搬機械側コントローラから送信される前記運搬機械に積み込まれた作業対象物の重量に基づいて前記運搬機械の異常の有無を判定する第5の判定を行い,
前記第5の判定により前記運搬機械に異常が有ると判定した場合,前記表示装置を介して前記異常の発生を報知し,前記運搬機械への作業対象物の積込が行われたことが前記入力装置を介して入力された場合に前記第1の荷重を積算すること
を特徴とする油圧ショベル。 In the hydraulic shovel of claim 1,
It further comprises an input device for inputting an instruction from the operator, and a display device for displaying predetermined information;
The controller is
A fifth determination is performed to determine the presence or absence of an abnormality of the transport machine based on the weight of the work object loaded into the transport machine transmitted from the transport machine controller.
If it is determined by the fifth determination that there is an abnormality in the transporting machine, the occurrence of the abnormality is notified via the display device, and the loading of the work object onto the transporting machine is performed. A hydraulic shovel, wherein the first load is integrated when it is input through an input device. - 請求項1の油圧ショベルにおいて,
操作者からの指示を入力するための入力装置と,所定の情報を表示するための表示装置とをさらに有し,
前記コントローラは,
前記運搬機械側コントローラで演算された前記油圧ショベルにより前記運搬機械へ積込まれた作業対象物の荷重である第2の荷重と前記第1の荷重との差分が所定値を越える場合、前記油圧ショベルと前記運搬機械のいずれかに異常が有ると判定し,
前記油圧ショベルと前記運搬機械のいずれかに異常が有ると判定した場合,前記表示装置を介して前記異常の発生を報知し,前記運搬機械への作業対象物の積込が行われたことが前記入力装置を介して入力された場合に前記第1の荷重を積算すること
を特徴とする油圧ショベル。 In the hydraulic shovel of claim 1,
It further comprises an input device for inputting an instruction from the operator, and a display device for displaying predetermined information;
The controller is
When the difference between the second load, which is the load of the work object loaded into the transport machine by the hydraulic shovel calculated by the transport machine-side controller, and the first load exceeds a predetermined value, the hydraulic pressure It is determined that there is an abnormality in either the shovel or the transport machine,
When it is determined that there is an abnormality in either the hydraulic shovel or the transport machine, the occurrence of the abnormality is notified via the display device, and the loading of the work object onto the transport machine is performed. A hydraulic shovel, wherein the first load is integrated when it is input through the input device. - 請求項1の油圧ショベルにおいて,
前記コントローラは,前記運搬機械から送信される,前記運搬機械の走行速度に基づいて前記運搬機械が前記油圧ショベルによる作業対象物の積込作業に従事しているか否かを判定する第6の判定を行い、前記第6の判定結果が切り替わった場合に,前記作業対象物の荷重の積算値をリセットすること
を特徴とする油圧ショベル。 In the hydraulic shovel of claim 1,
The controller determines a sixth determination as to whether or not the transport machine is engaged in the loading operation of the work object by the hydraulic shovel based on the traveling speed of the transport machine transmitted from the transport machine. And the integrated value of the load of the work object is reset when the sixth determination result is switched.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/493,010 US11454005B2 (en) | 2017-09-21 | 2018-09-21 | Hydraulic excavator |
| EP18858189.6A EP3686357A4 (en) | 2017-09-21 | 2018-09-21 | Hydraulic shovel |
| CN201880013791.8A CN110382789B (en) | 2017-09-21 | 2018-09-21 | Hydraulic excavator |
| KR1020197025128A KR102234963B1 (en) | 2017-09-21 | 2018-09-21 | Hydraulic excavator |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017181789A JP6745254B2 (en) | 2017-09-21 | 2017-09-21 | Hydraulic excavator |
| JP2017-181789 | 2017-09-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019059383A1 true WO2019059383A1 (en) | 2019-03-28 |
Family
ID=65811383
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/035212 WO2019059383A1 (en) | 2017-09-21 | 2018-09-21 | Hydraulic shovel |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11454005B2 (en) |
| EP (1) | EP3686357A4 (en) |
| JP (1) | JP6745254B2 (en) |
| KR (1) | KR102234963B1 (en) |
| CN (1) | CN110382789B (en) |
| WO (1) | WO2019059383A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113654630A (en) * | 2021-07-30 | 2021-11-16 | 深圳市中金岭南有色金属股份有限公司凡口铅锌矿 | Mineral weight measuring method, device, equipment and storage medium |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3589790B1 (en) * | 2017-03-03 | 2023-07-12 | CNH Industrial Belgium NV | System and method for estimating implement load weights for a work vehicle |
| JP6868938B2 (en) * | 2017-08-24 | 2021-05-12 | 日立建機株式会社 | Construction machinery load measurement system |
| US11498785B2 (en) * | 2019-01-30 | 2022-11-15 | Caterpillar Inc. | System and method of automated clean out of carryback in surface haulage |
| JP7253949B2 (en) * | 2019-03-25 | 2023-04-07 | 株式会社小松製作所 | Work machines, systems and methods of controlling work machines |
| JP7300408B2 (en) * | 2020-02-21 | 2023-06-29 | 日立建機株式会社 | Working machines and control systems |
| CN117043421A (en) * | 2021-03-29 | 2023-11-10 | 住友建机株式会社 | Display device for excavator, excavator and support device for excavator |
| CN113982060A (en) * | 2021-11-12 | 2022-01-28 | 博雷顿科技有限公司 | Double-motor control system and method for electric loader |
| JP2023141281A (en) * | 2022-03-23 | 2023-10-05 | 日立建機株式会社 | Work machine |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1037254A (en) * | 1996-07-29 | 1998-02-10 | Shin Caterpillar Mitsubishi Ltd | Loading weight measuring device in working machine |
| JP3787046B2 (en) | 1999-09-17 | 2006-06-21 | 日立建機株式会社 | Work volume monitoring device for hydraulic excavators |
| JP3830151B2 (en) * | 2001-10-18 | 2006-10-04 | 日立建機株式会社 | Work amount detection device, work amount detection method and work amount detection result display device for hydraulic excavator |
| JP2011516755A (en) * | 2008-03-07 | 2011-05-26 | キャタピラー インコーポレイテッド | Adaptive payload monitoring system |
| JP2012215495A (en) * | 2011-04-01 | 2012-11-08 | Hitachi Constr Mach Co Ltd | Load measuring device |
| JP2015040422A (en) * | 2013-08-22 | 2015-03-02 | 日立建機株式会社 | Display device of construction machine |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2982584A (en) | 1983-06-17 | 1984-12-20 | Prgromet, L.S. | Excavator bucket load weigher |
| JPH0610378A (en) * | 1992-06-26 | 1994-01-18 | Komatsu Ltd | Workload detection device for excavation and loading machine |
| US5528498A (en) * | 1994-06-20 | 1996-06-18 | Caterpillar Inc. | Laser referenced swing sensor |
| US6157889A (en) * | 1999-09-16 | 2000-12-05 | Modular Mining Systems, Inc. | Load distribution system for haulage trucks |
| JP2008240461A (en) * | 2007-03-28 | 2008-10-09 | Komatsu Ltd | Overload preventing system and overload preventing method |
| EP2527541A1 (en) * | 2010-01-22 | 2012-11-28 | Hitachi Construction Machinery Co., Ltd. | Loading guide system |
| JP2012036645A (en) * | 2010-08-06 | 2012-02-23 | Ohbayashi Corp | Loading amount management system and loading amount management method |
| US8833861B2 (en) * | 2010-12-03 | 2014-09-16 | Caterpillar Inc. | Loading analysis system and method |
| US8862390B2 (en) * | 2011-03-31 | 2014-10-14 | Hitachi Construction Machinery Co., Ltd. | Position adjustment assistance system for transportation machine |
| JP5230851B1 (en) | 2011-11-04 | 2013-07-10 | 株式会社小松製作所 | Loading system and transporter |
| EP3985184A1 (en) * | 2015-08-24 | 2022-04-20 | Komatsu Ltd. | Control system for wheel loader, control method thereof, and method of controlling wheel loader |
| US9714497B2 (en) * | 2015-10-21 | 2017-07-25 | Caterpillar Inc. | Control system and method for operating a machine |
| US10234368B2 (en) * | 2016-10-13 | 2019-03-19 | Deere & Company | System and method for load evaluation |
| US20180179732A1 (en) * | 2016-12-22 | 2018-06-28 | Caterpillar Inc. | Realtime payload mapping for loader/hauler system optimization |
-
2017
- 2017-09-21 JP JP2017181789A patent/JP6745254B2/en active Active
-
2018
- 2018-09-21 WO PCT/JP2018/035212 patent/WO2019059383A1/en unknown
- 2018-09-21 US US16/493,010 patent/US11454005B2/en active Active
- 2018-09-21 EP EP18858189.6A patent/EP3686357A4/en active Pending
- 2018-09-21 KR KR1020197025128A patent/KR102234963B1/en active IP Right Grant
- 2018-09-21 CN CN201880013791.8A patent/CN110382789B/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1037254A (en) * | 1996-07-29 | 1998-02-10 | Shin Caterpillar Mitsubishi Ltd | Loading weight measuring device in working machine |
| JP3787046B2 (en) | 1999-09-17 | 2006-06-21 | 日立建機株式会社 | Work volume monitoring device for hydraulic excavators |
| JP3830151B2 (en) * | 2001-10-18 | 2006-10-04 | 日立建機株式会社 | Work amount detection device, work amount detection method and work amount detection result display device for hydraulic excavator |
| JP2011516755A (en) * | 2008-03-07 | 2011-05-26 | キャタピラー インコーポレイテッド | Adaptive payload monitoring system |
| JP2012215495A (en) * | 2011-04-01 | 2012-11-08 | Hitachi Constr Mach Co Ltd | Load measuring device |
| JP2015040422A (en) * | 2013-08-22 | 2015-03-02 | 日立建機株式会社 | Display device of construction machine |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3686357A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113654630A (en) * | 2021-07-30 | 2021-11-16 | 深圳市中金岭南有色金属股份有限公司凡口铅锌矿 | Mineral weight measuring method, device, equipment and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3686357A1 (en) | 2020-07-29 |
| JP6745254B2 (en) | 2020-08-26 |
| CN110382789A (en) | 2019-10-25 |
| KR20190112075A (en) | 2019-10-02 |
| JP2019056246A (en) | 2019-04-11 |
| CN110382789B (en) | 2021-08-31 |
| KR102234963B1 (en) | 2021-04-01 |
| US20200115888A1 (en) | 2020-04-16 |
| EP3686357A4 (en) | 2021-06-30 |
| US11454005B2 (en) | 2022-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6745254B2 (en) | Hydraulic excavator | |
| JP5406223B2 (en) | Adaptive payload monitoring system | |
| KR102402515B1 (en) | working machine | |
| JP6807293B2 (en) | Work machine | |
| CN111051620B (en) | Working machine | |
| JP2018048548A (en) | Method and system for assisting shovel operator in loading of transportation means | |
| US9108596B2 (en) | Controller for, and method of, operating a sensor cleaning system | |
| US8948977B2 (en) | Systems and methods for machine implement control | |
| JP2020139330A (en) | Work machine | |
| JP2017095061A (en) | Dump truck | |
| JP2018145754A (en) | Load measurement device of work machine | |
| JP6887401B2 (en) | Work machine | |
| US11299869B2 (en) | Loading amount accumulation device and loading amount accumulation system | |
| CN114423905B (en) | Engineering machinery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18858189 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20197025128 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018858189 Country of ref document: EP Effective date: 20200421 |