WO2018105580A1 - 符号化装置、復号装置、符号化方法及び復号方法 - Google Patents
符号化装置、復号装置、符号化方法及び復号方法 Download PDFInfo
- Publication number
- WO2018105580A1 WO2018105580A1 PCT/JP2017/043558 JP2017043558W WO2018105580A1 WO 2018105580 A1 WO2018105580 A1 WO 2018105580A1 JP 2017043558 W JP2017043558 W JP 2017043558W WO 2018105580 A1 WO2018105580 A1 WO 2018105580A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- motion vector
- block
- reference picture
- motion vectors
- candidate
- Prior art date
Links
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
Definitions
- the present disclosure relates to an encoding device that encodes moving image information.
- H.264 265 exists.
- H. H.265 is also called HEVC (High Efficiency Video Coding).
- the present disclosure provides an encoding apparatus and the like that can support the reduction of the code amount related to a moving image.
- An encoding apparatus is an encoding apparatus that encodes moving image information, and includes a memory and a circuit that can access the memory, and the circuit that can access the memory includes: From the one or more motion vectors of the first reference block included in the first reference picture constituting the first reference picture list of the two reference picture lists for bi-prediction, the prediction motion vector of the encoding target block One or more candidate motion vectors for, and from one or more motion vectors of a second reference block included in a second reference picture constituting a second reference picture list of the two reference picture lists, One or more candidate motion vectors for a predicted motion vector are derived, and one or more derived from one or more motion vectors of the first reference block.
- the information of the encoding target block is encoded using the predicted motion vector.
- the encoding apparatus and the like can support the reduction of the code amount related to a moving image.
- FIG. 1 is a block diagram showing a functional configuration of the encoding apparatus according to Embodiment 1.
- FIG. 2 is a diagram illustrating an example of block division in the first embodiment.
- FIG. 3 is a table showing conversion basis functions corresponding to each conversion type.
- FIG. 4A is a diagram illustrating an example of the shape of a filter used in ALF.
- FIG. 4B is a diagram illustrating another example of the shape of a filter used in ALF.
- FIG. 4C is a diagram illustrating another example of the shape of a filter used in ALF.
- FIG. 5A is a diagram illustrating 67 intra prediction modes in intra prediction.
- FIG. 5B is a flowchart for explaining the outline of the predicted image correction process by the OBMC process.
- FIG. 5A is a diagram illustrating 67 intra prediction modes in intra prediction.
- FIG. 5B is a flowchart for explaining the outline of the predicted image correction process by the OBMC process.
- FIG. 5A is a
- FIG. 5C is a conceptual diagram for explaining the outline of the predicted image correction process by the OBMC process.
- FIG. 5D is a diagram illustrating an example of FRUC.
- FIG. 6 is a diagram for explaining pattern matching (bilateral matching) between two blocks along the motion trajectory.
- FIG. 7 is a diagram for explaining pattern matching (template matching) between a template in the current picture and a block in the reference picture.
- FIG. 8 is a diagram for explaining a model assuming constant velocity linear motion.
- FIG. 9A is a diagram for explaining derivation of a motion vector in units of sub-blocks based on motion vectors of a plurality of adjacent blocks.
- FIG. 9B is a diagram for explaining the outline of the motion vector deriving process in the merge mode.
- FIG. 9A is a diagram for explaining derivation of a motion vector in units of sub-blocks based on motion vectors of a plurality of adjacent blocks.
- FIG. 9B is a diagram for explaining the outline of
- FIG. 9C is a conceptual diagram for explaining an outline of DMVR processing.
- FIG. 9D is a diagram for describing an overview of a predicted image generation method using luminance correction processing by LIC processing.
- FIG. 10 is a block diagram showing a functional configuration of the decoding apparatus according to the first embodiment.
- FIG. 11 is a conceptual diagram showing adjacent blocks and motion vectors of adjacent blocks.
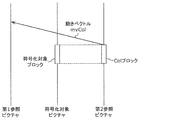
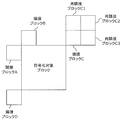
- FIG. 12 is a conceptual diagram showing the co-located block and the motion vector of the co-located block.
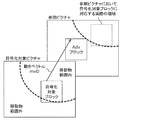
- FIG. 13 is a conceptual diagram showing an ATMVP block and a motion vector of the ATMVP block.
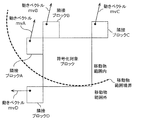
- FIG. 14 is a conceptual diagram illustrating an example of the relationship among the encoding target block, the adjacent block, and the range of the moving object.
- FIG. 14 is a conceptual diagram illustrating an example of the relationship among the encoding target block, the adjacent block, and the range of the moving object.
- FIG. 15 is a conceptual diagram illustrating an example of an inappropriate ATMVP block.
- FIG. 16 is a block diagram more specifically showing the functional configuration of the encoding apparatus according to Embodiment 1.
- FIG. 17 is a block diagram more specifically showing the functional configuration of the decoding apparatus according to the first embodiment.
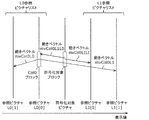
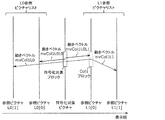
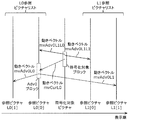
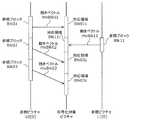
- FIG. 18A is a conceptual diagram illustrating candidate motion vectors derived from the bi-predicted co-located block included in the L0 reference picture list.
- FIG. 18B is a conceptual diagram illustrating candidate motion vectors derived from the bi-predicted co-located block included in the L1 reference picture list.
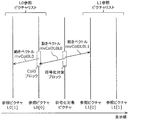
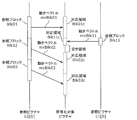
- FIG. 19A is a conceptual diagram illustrating candidate motion vectors derived from a uni-predicted co-located block included in the L0 reference picture list.
- FIG. 19B is a conceptual diagram illustrating candidate motion vectors derived from a uni-predicted co-located block included in the L1 reference picture list.
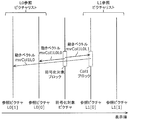
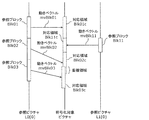
- FIG. 20A is a conceptual diagram illustrating candidate motion vectors derived from a bi-predicted co-located block included in the L0 reference picture list for a bi-predictive encoding target block in only one direction.
- FIG. 20B is a conceptual diagram illustrating candidate motion vectors derived from the bi-predicted co-located block included in the L1 reference picture list for a bi-predictive encoding target block in only one direction.
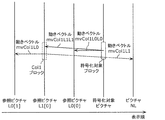
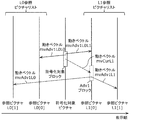
- FIG. 21A is a conceptual diagram showing candidate motion vectors derived from ATMVP blocks included in the L0 reference picture list.
- FIG. 21B is a conceptual diagram showing candidate motion vectors derived from ATMVP blocks included in the L1 reference picture list.
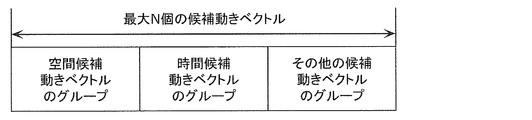
- FIG. 22 is a conceptual diagram illustrating a plurality of groups related to a plurality of candidate motion vectors.
- FIG. 23 is a conceptual diagram illustrating a block for deriving a spatial candidate motion vector.
- FIG. 24 is a conceptual diagram illustrating mapping of blocks included in the L0 reference picture list and blocks included in the L1 reference picture list.
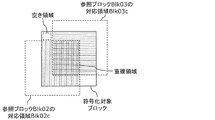
- FIG. 25 is a conceptual diagram showing an empty area.
- FIG. 26 is a conceptual diagram showing an overlapping area.
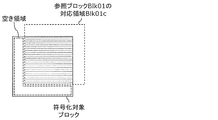
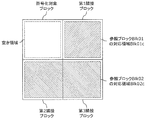
- FIG. 27 is a conceptual diagram illustrating an example of an encoding target block and a corresponding region.
- FIG. 28 is a conceptual diagram illustrating an example of an encoding target block and two corresponding areas.
- FIG. 29 is a conceptual diagram illustrating an example of an encoding target block, a plurality of adjacent blocks, and a plurality of corresponding regions.
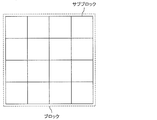
- FIG. 30 is a conceptual diagram illustrating blocks defined as coding units and sub-blocks defined with a predetermined size.
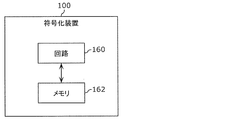
- FIG. 31 is a block diagram illustrating an implementation example of the coding apparatus according to Embodiment 1.
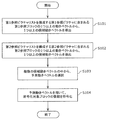
- FIG. 32A is a flowchart illustrating a first operation example regarding derivation of a candidate motion vector at the time of encoding a moving image.
- FIG. 32B is a flowchart illustrating a second operation example regarding derivation of a candidate motion vector at the time of encoding a moving image.
- FIG. 32A is a flowchart illustrating a first operation example regarding derivation of a candidate motion vector at the time of encoding a moving image.
- FIG. 32B is a flowchart illustrating a second operation example regarding derivation of a candidate motion vector at the time of en
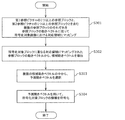
- FIG. 32C is a flowchart illustrating a third operation example regarding derivation of a candidate motion vector at the time of encoding a moving image.
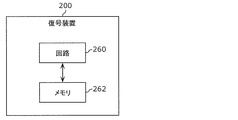
- FIG. 33 is a block diagram illustrating an implementation example of the decoding apparatus according to the first embodiment.
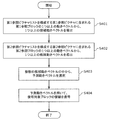
- FIG. 34A is a flowchart illustrating a first operation example regarding derivation of a candidate motion vector when decoding a moving image.
- FIG. 34B is a flowchart illustrating a second operation example regarding derivation of candidate motion vectors at the time of decoding a moving image.
- FIG. 34C is a flowchart illustrating a third operation example regarding derivation of candidate motion vectors at the time of decoding a moving image.
- FIG. 34A is a flowchart illustrating a first operation example regarding derivation of a candidate motion vector when decoding a moving image.
- FIG. 34B is a flowchart illustrating a second operation example regarding derivation of candidate motion vectors at the time of decoding a moving
- FIG. 35 is an overall configuration diagram of a content supply system that implements a content distribution service.
- FIG. 36 is a diagram illustrating an example of an encoding structure at the time of scalable encoding.
- FIG. 37 is a diagram illustrating an example of a coding structure at the time of scalable coding.
- FIG. 38 shows an example of a web page display screen.
- FIG. 39 is a diagram showing an example of a web page display screen.
- FIG. 40 is a diagram illustrating an example of a smartphone.
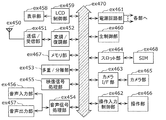
- FIG. 41 is a block diagram illustrating a configuration example of a smartphone.
- Inter-frame prediction may be used in coding blocks constituting a moving image. Inter-screen prediction is also called motion compensation.
- the encoding apparatus detects (estimates) the motion of the moving image to detect the motion vector of the encoding target block. Then, the encoding device generates a prediction image of the encoding target block with reference to an image indicated by the motion vector of the encoding target block in a reference picture that is temporally different from the encoding target block. Then, the encoding device encodes a difference image between the image of the encoding target block and the predicted image of the encoding target block.
- the encoding device may encode the motion vector of the encoding target block.
- the decoding apparatus decodes the motion vector and the difference image of the decoding target block, and decodes the decoding target block using the motion vector and the difference image of the decoding target block.
- the decoding device refers to an image indicated by a motion vector of a decoding target block in a reference picture that is temporally different from the decoding target block, and generates a prediction image of the decoding target block. Then, the decoding apparatus reconstructs the image of the decoding target block by adding the prediction image of the decoding target block and the difference image of the decoding target block.
- the encoding apparatus may encode a differential motion vector between the motion vector of the encoding target block and the predicted motion vector of the encoding target block in encoding the motion vector of the encoding target block.
- the encoding device derives a plurality of candidate motion vectors for the predicted motion vector from the plurality of motion vectors of the plurality of blocks.
- the plurality of blocks include, for example, a plurality of blocks spatially different from the encoding target block and one block temporally different from the encoding target block.
- the encoding device encodes a motion vector predictor index for specifying a motion vector predictor from among a plurality of candidate motion vectors.
- the decoding device decodes the differential motion vector and the predicted motion vector index of the decoding target block.
- the decoding device derives a plurality of candidate motion vectors for the predicted motion vector from the plurality of motion vectors of the plurality of blocks.
- the plurality of blocks correspond to the plurality of blocks used for derivation of the plurality of candidate motion vectors at the time of encoding, for example, a plurality of blocks spatially different from the block to be decoded and a block to be decoded It contains one block that is different in time.
- the decoding apparatus specifies the prediction motion vector of the decoding target block from among the plurality of candidate motion vectors using the prediction motion vector index of the decoding target block. Then, the decoding apparatus derives the motion vector of the decoding target block by adding the prediction motion vector of the decoding target block and the difference motion vector of the decoding target block. Thereby, the same motion vector can be used for the encoding device and the decoding device.
- the encoding device and the decoding device may perform an operation using the differential motion vector as described above in an operation mode called a predicted motion vector designation mode.
- the encoding device may generate a prediction image using the prediction motion vector of the encoding target block as the motion vector of the encoding target block.
- the decoding apparatus may generate a prediction image using the prediction motion vector of the decoding target block as the motion vector of the decoding target block.
- the encoding device and the decoding device may perform such an operation in an operation mode called a merge mode.
- the encoding apparatus evaluates each of the plurality of candidate motion vectors, and the candidate motion that is most highly evaluated among the plurality of candidate motion vectors.
- a vector may be selected as the predicted motion vector.
- the encoding device is two areas different from the encoding target block, and the higher the degree of matching between the two evaluation target areas, at least one of which is two areas determined according to the evaluation target candidate motion vector, The candidate motion vector to be evaluated is evaluated higher.
- the decoding apparatus also evaluates each of the plurality of candidate motion vectors when selecting a predicted motion vector from among the plurality of candidate motion vectors, and selects the most highly evaluated candidate motion vector from among the plurality of candidate motion vectors. Select as predicted motion vector.
- the decoding device has two areas different from the decoding target block, and the higher the degree of matching between the two evaluation target areas, at least one of which is two areas determined according to the candidate motion vector to be evaluated, the higher the evaluation target The candidate motion vectors of are highly evaluated.
- the encoding device and the decoding device can derive the same motion vector predictor according to the same selection method.
- the encoding device and the decoding device can use the same motion vector without encoding and decoding the motion vector by using the derived predicted motion vector as the motion vector.
- Such a technique is also called FRUC (Frame Rate Up-Conversion).
- a predicted motion vector is selected from a plurality of candidate motion vectors.
- an appropriate candidate motion vector is not included in the plurality of candidate motion vectors, an appropriate predicted motion vector is not derived.
- an appropriate motion vector predictor is not derived, an appropriate prediction process is not performed, encoding efficiency is reduced, and the amount of code is increased. Then, the moving image transmission delay becomes larger, and the moving image storage capacity also becomes larger. As a result, the consumption of resources and energy increases.
- an encoding device that encodes moving image information, and includes a memory and a circuit that can access the memory, and the memory that can access the memory.
- the circuit predicts an encoding target block from one or more motion vectors of a first reference block included in a first reference picture constituting a first reference picture list of two reference picture lists for bi-prediction.
- One or more candidate motion vectors for the motion vector are derived, and from one or more motion vectors of a second reference block included in a second reference picture constituting a second reference picture list of the two reference picture lists Deriving one or more candidate motion vectors for the predicted motion vector and deriving from one or more motion vectors of the first reference block Selecting the predicted motion vector from a plurality of candidate motion vectors including one or more candidate motion vectors and one or more candidate motion vectors derived from the one or more motion vectors of the second reference block Then, the encoding target block information is encoded using the predicted motion vector.
- the encoding apparatus can derive a candidate motion vector from the first reference block in the first reference picture list and derive a candidate motion vector from the second reference block in the second reference picture list. Therefore, the encoding apparatus can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector. Thus, the encoding apparatus can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- the circuit applies two scaling ratios to one motion vector of two motion vectors of the first reference block.
- the second reference block is applied by applying two scaling ratios to one of the two motion vectors of the second reference block.
- candidate motion vectors for referring to the first reference picture list from the one motion vector, and the second reference picture A candidate motion vector for referencing the list may be derived.
- the encoding apparatus is configured with two candidate motion vectors that refer to two reference picture lists from one motion vector of the first reference block and one motion vector of the second reference block.
- Candidate motion vector sets can be derived. That is, the encoding device can derive two candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from two motion vectors having different characteristics.
- the circuit may include two motion vectors of the first reference block.
- a candidate motion vector for referring to the first reference picture list from one motion vector of the two motion vectors of the first reference block;
- a candidate motion vector for referring to the second reference picture list is derived, and the second reference block is encoded by bi-prediction only in one of the forward direction and the backward direction in display order
- the second reference block is applied by applying two scaling ratios to one of the two motion vectors of the second reference block.
- a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list may be derived from one of the two motion vectors of Good.
- the encoding apparatus can generate a candidate motion vector set including two candidate motion vectors that refer to two reference picture lists from only one motion vector of two motion vectors that are assumed to have similar characteristics. Can be derived. Therefore, the encoding device can improve the processing efficiency.
- the circuit applies the two scaling ratios to each of the two motion vectors of the first reference block, thereby Deriving two candidate motion vectors for referring to the first reference picture list and two candidate motion vectors for referring to the second reference picture list from two motion vectors of the first reference block;
- two motions of the second reference block are applied by applying two scaling ratios to each of the two motion vectors of the second reference block.
- Two candidate motion vectors for referring to the first reference picture list from the vector, and the second reference picture list And two candidate motion vectors for reference may be derived.
- the encoding apparatus can derive a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from each of four motion vectors of two reference blocks. That is, the encoding device can derive four candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from four motion vectors of two reference blocks.
- the circuit calculates the first reference picture list from one of the two motion vectors of the first reference block.
- a candidate motion vector for reference is derived
- a candidate motion vector for referring to the second reference picture list is derived from the other motion vector of the two motion vectors of the first reference block.
- a candidate motion vector for referring to the first reference picture list is derived from one of the two motion vectors of the second reference block.
- the motion vector may derive.
- the encoding device can derive four candidate motion vectors from the four motion vectors of the two reference blocks, respectively, and derive two candidate motion vector sets composed of the four candidate motion vectors. be able to. That is, the encoding apparatus can appropriately reflect the four motion vectors of the two reference blocks in the four candidate motion vectors included in the two candidate motion vector sets.
- the circuit applies the two scaling ratios to one motion vector of the first reference block.
- a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list are derived from one motion vector of the reference block, and the second reference block is
- the first reference picture is derived from one motion vector of the second reference block by applying two scaling ratios to one motion vector of the second reference block.
- a candidate motion vector for referring to the list and a candidate motion vector for referring to the second reference picture list are derived. It may be.
- the encoding apparatus can derive a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from only one motion vector of each reference block. That is, the encoding apparatus can derive a candidate motion vector set including two candidate motion vectors that can be used for bi-prediction from only one motion vector of each reference block.
- the circuit calculates from one or more motion vectors of the first reference block.
- Two or more candidate motion vectors for referring to the one direction used for bi-prediction of the encoding target block are derived, and the encoding target block is derived from the one or more motion vectors of the second reference block.
- Two or more candidate motion vectors for referring to the one direction used for bi-prediction may be derived.
- the encoding apparatus can derive two or more candidate motion vectors that refer to one direction from each reference block. Therefore, the encoding device can derive one or more candidate motion vector sets suitable for bi-prediction in only one direction from each reference block.
- the circuit is a reference picture list for the first reference picture list to refer to the forward direction in the display order, and the reference picture for the second reference picture list to refer to the backward direction in the display order.
- the first reference block is encoded with bi-prediction in both forward and backward directions in display order
- the second reference block is encoded with bi-prediction in both forward and backward directions in display order.
- the backward direction in the display order of the two motion vectors of the first reference block is changed.
- the first reference picture list is referred to from one motion vector of the first reference block.
- the encoding apparatus sets candidate motion vector sets that refer to the two reference picture lists from the motion vectors in the reference direction that temporally go from the reference block to the encoding target block, out of the two motion vectors of each reference block.
- a decoding device is a decoding device that decodes moving image information, and includes a memory and a circuit that can access the memory, and the circuit that can access the memory includes: One of the motion vectors of the first reference block included in the first reference picture constituting the first reference picture list of the two reference picture lists for bi-prediction is set to 1 for the predicted motion vector of the decoding target block. One or more candidate motion vectors are derived, and the predicted motion is derived from one or more motion vectors of a second reference block included in a second reference picture constituting a second reference picture list of the two reference picture lists.
- One or more candidate motion vectors for the vector, and one or more derived from the one or more motion vectors of the first reference block Selecting the predicted motion vector from a plurality of candidate motion vectors including a candidate motion vector and one or more candidate motion vectors derived from one or more motion vectors of the second reference block;
- the information of the decoding target block is decoded using a motion vector.
- the decoding apparatus can derive the candidate motion vector from the first reference block in the first reference picture list and can derive the candidate motion vector from the second reference block in the second reference picture list. Therefore, the decoding apparatus can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector. Thus, the decoding apparatus can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- the circuit applies two scaling ratios to one motion vector of two motion vectors of the first reference block.
- a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list are derived from one motion vector of the first reference block;
- two reference blocks are decoded by bi-prediction, by applying two scaling ratios to one of the two motion vectors of the second reference block, 1 of the second reference block
- a candidate motion vector for referencing the door may be derived.
- the decoding apparatus can select a candidate composed of two candidate motion vectors that refer to two reference picture lists from one motion vector of the first reference block and one motion vector of the second reference block.
- a motion vector set can be derived. That is, the decoding apparatus can derive two sets of candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from two motion vectors having different characteristics.
- the circuit selects one of the two motion vectors of the first reference block.
- a candidate motion vector for referring to the first reference picture list from one of the two motion vectors of the first reference block by applying two scaling ratios to one motion vector;
- a candidate motion vector for referring to the second reference picture list is derived, and when the second reference block is decoded by bi-prediction in only one of the forward and backward directions in display order,
- the second reference block From one motion vector of the two motion vectors, and a candidate motion vector for referring to the first reference picture list may be derived the candidate motion vectors for referring to the second reference picture list.
- the decoding apparatus derives a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from only one motion vector of two motion vectors assumed to have similar characteristics. can do. Therefore, the decoding device can improve the processing efficiency.
- the circuit applies the two scaling ratios to each of the two motion vectors of the first reference block, thereby the first reference block. Deriving two candidate motion vectors for referring to the first reference picture list and two candidate motion vectors for referring to the second reference picture list from two motion vectors of one reference block,
- the second reference block is decoded by bi-prediction, by applying two scaling ratios to each of the two motion vectors of the second reference block, from the two motion vectors of the second reference block , Two candidate motion vectors for referring to the first reference picture list, and the second reference picture list. It may be derived and two candidate motion vectors for.
- the decoding apparatus can derive a candidate motion vector set including two candidate motion vectors referring to two reference picture lists from each of the four motion vectors of two reference blocks. That is, the decoding apparatus can derive four candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from four motion vectors of two reference blocks.
- the circuit refers to the first reference picture list from one of the two motion vectors of the first reference block.
- a candidate motion vector for referring to the first reference picture list is derived from one of the two motion vectors of the second reference block, Candidates for referring to the second reference picture list from the other motion vector of the two motion vectors of the second reference block It may be derived trees vector.
- the decoding apparatus can derive four candidate motion vectors from the four motion vectors of the two reference blocks, respectively, and derive two candidate motion vector sets composed of the four candidate motion vectors. Can do. That is, the decoding apparatus can appropriately reflect the four motion vectors of the two reference blocks to the four candidate motion vectors included in the two candidate motion vector sets.
- the circuit applies the two scaling ratios to one motion vector of the first reference block, thereby the first reference block.
- a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list are derived from one motion vector of the block.
- the first reference picture list is obtained from one motion vector of the second reference block by applying two scaling ratios to one motion vector of the second reference block.
- a candidate motion vector for reference and a candidate motion vector for referring to the second reference picture list are derived. It may be.
- the decoding apparatus can derive a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from only one motion vector of each reference block. That is, the decoding apparatus can derive a candidate motion vector set including two candidate motion vectors that can be used for bi-prediction from only one motion vector of each reference block.
- the decoding target block is decoded by bi-prediction in only one of the forward direction and the backward direction in the display order, from the one or more motion vectors of the first reference block, Two or more candidate motion vectors for referring to the one direction used for bi-prediction of a decoding target block are derived, and bi-prediction of the decoding target block is performed from one or more motion vectors of the second reference block. Two or more candidate motion vectors for referring to the one direction used may be derived.
- the decoding apparatus when bi-prediction in only one direction is used for the decoding target block, the decoding apparatus can derive two or more candidate motion vectors referring to the one direction from each reference block. Therefore, the decoding apparatus can derive one or more candidate motion vector sets suitable for bi-prediction only in one direction from each reference block.
- the circuit is a reference picture list for the first reference picture list to refer to the forward direction in the display order, and the reference picture for the second reference picture list to refer to the backward direction in the display order.
- the first reference block is decoded with forward and backward bi-prediction in display order
- the second reference block is decoded with forward and backward bi-prediction in display order
- the backward reference is made in the display order among the two motion vectors of the first reference block.
- the first reference picture list is referred to from one motion vector of the first reference block.
- One motion vector and a candidate motion vector for referring to the second reference picture list, and one motion for referring to the forward direction in the display order among the two motion vectors of the second reference block By applying two scaling ratios to the vector, the candidate motion vector for referring to the first reference picture list and the second reference picture list are referred to from one motion vector of the second reference block. And a candidate motion vector to be derived.
- the decoding apparatus derives a candidate motion vector set that refers to the two reference picture lists from the motion vector in the reference direction that temporally travels from the reference block to the decoding target block among the two motion vectors of each reference block. can do. That is, the decoding apparatus can appropriately derive a candidate motion vector set that can be used for bi-prediction from motion vectors that are temporally related to the decoding target block, out of the two motion vectors of each reference block. it can.
- An encoding method is an encoding method for encoding moving picture information, and configures a first reference picture list of two reference picture lists for bi-prediction.
- One or more candidate motion vectors for the predicted motion vector of the current block are derived from one or more motion vectors of the first reference block included in the first reference picture, and the first reference picture list of the two reference picture lists is derived.
- One or more candidate motion vectors for the prediction motion vector are derived from one or more motion vectors of a second reference block included in a second reference picture constituting a two-reference picture list, and 1 of the first reference block is derived.
- One or more candidate motion vectors derived from one or more motion vectors and one or more motion vectors of the second reference block More than three among a plurality of candidate motion vectors containing the candidate motion vectors, selecting the prediction motion vector, using the predicted motion vector, coding the information of the encoding target block.
- an apparatus using this encoding method derives a candidate motion vector from the first reference block in the first reference picture list and derives a candidate motion vector from the second reference block in the second reference picture list. be able to. Therefore, an apparatus using this encoding method can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector.
- an apparatus or the like using this encoding method can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- a decoding method is a decoding method for decoding moving picture information, and includes a first reference that constitutes a first reference picture list of two reference picture lists for bi-prediction.
- One or more candidate motion vectors for the prediction motion vector of the decoding target block are derived from one or more motion vectors of the first reference block included in the picture, and the second reference picture list of the two reference picture lists
- One or more candidate motion vectors for the predicted motion vector are derived from one or more motion vectors of the second reference block included in the second reference picture constituting the first reference block, and the one or more motions of the first reference block
- One or more candidate motion vectors derived from a vector and one or more motion vectors derived from one or more motion vectors of the second reference block From among the plurality of candidate motion vectors containing the candidate motion vectors, selecting the prediction motion vector, using the predicted motion vector to decode the information of the decoding target block.
- an apparatus or the like using this decoding method derives a candidate motion vector from the first reference block in the first reference picture list and derives a candidate motion vector from the second reference block in the second reference picture list. Can do. Therefore, an apparatus using this decoding method can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector.
- an apparatus or the like using this decoding method can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- these comprehensive or specific aspects may be realized by a system, an apparatus, a method, an integrated circuit, a computer program, or a non-transitory recording medium such as a computer-readable CD-ROM.
- the present invention may be realized by any combination of an apparatus, a method, an integrated circuit, a computer program, and a recording medium.
- an outline of the first embodiment will be described as an example of an encoding device and a decoding device to which the processing and / or configuration described in each aspect of the present disclosure to be described later can be applied.
- the first embodiment is merely an example of an encoding device and a decoding device to which the processing and / or configuration described in each aspect of the present disclosure can be applied, and the processing and / or processing described in each aspect of the present disclosure.
- the configuration can also be implemented in an encoding device and a decoding device different from those in the first embodiment.
- the encoding apparatus or decoding apparatus according to the first embodiment corresponds to the constituent elements described in each aspect of the present disclosure among a plurality of constituent elements constituting the encoding apparatus or decoding apparatus. Replacing the constituent elements with constituent elements described in each aspect of the present disclosure (2) A plurality of constituent elements constituting the encoding apparatus or decoding apparatus with respect to the encoding apparatus or decoding apparatus of the first embodiment The constituent elements corresponding to the constituent elements described in each aspect of the present disclosure are added to the present disclosure after arbitrary changes such as addition, replacement, and deletion of functions or processes to be performed on some constituent elements among the constituent elements.
- a component that performs a part of processing performed by a component is a component that is described in each aspect of the present disclosure, a component that includes a part of a function included in the component described in each aspect of the present disclosure, (6)
- a method performed by the encoding device or the decoding device according to Embodiment 1 is performed in combination with a component that performs a part of processing performed by the component described in each aspect of the disclosure.
- the process corresponding to the process described in each aspect of the present disclosure is replaced with the process described in each aspect of the present disclosure.
- the encoding apparatus according to the first embodiment or A part of the plurality of processes included in the method performed by the decoding device is performed in combination with the processes described in each aspect of the present disclosure
- the processes and / or configurations described in each aspect of the present disclosure are not limited to the above examples.
- the present invention may be implemented in an apparatus used for a different purpose from the moving picture / picture encoding apparatus or moving picture / picture decoding apparatus disclosed in the first embodiment, and the processing and / or described in each aspect.
- the configuration may be implemented alone.
- you may implement combining the process and / or structure which were demonstrated in the different aspect.
- FIG. 1 is a block diagram showing a functional configuration of encoding apparatus 100 according to Embodiment 1.
- the encoding device 100 is a moving image / image encoding device that encodes moving images / images in units of blocks.
- an encoding apparatus 100 is an apparatus that encodes an image in units of blocks, and includes a dividing unit 102, a subtracting unit 104, a transforming unit 106, a quantizing unit 108, and entropy encoding.
- Unit 110 inverse quantization unit 112, inverse transform unit 114, addition unit 116, block memory 118, loop filter unit 120, frame memory 122, intra prediction unit 124, inter prediction unit 126, A prediction control unit 128.
- the encoding device 100 is realized by, for example, a general-purpose processor and a memory.
- the processor when the software program stored in the memory is executed by the processor, the processor performs the division unit 102, the subtraction unit 104, the conversion unit 106, the quantization unit 108, the entropy encoding unit 110, and the inverse quantization unit 112.
- the encoding apparatus 100 includes a dividing unit 102, a subtracting unit 104, a transforming unit 106, a quantizing unit 108, an entropy coding unit 110, an inverse quantizing unit 112, an inverse transforming unit 114, an adding unit 116, and a loop filter unit 120.
- the intra prediction unit 124, the inter prediction unit 126, and the prediction control unit 128 may be implemented as one or more dedicated electronic circuits.
- the dividing unit 102 divides each picture included in the input moving image into a plurality of blocks, and outputs each block to the subtracting unit 104.
- the dividing unit 102 first divides a picture into blocks of a fixed size (for example, 128 ⁇ 128).
- This fixed size block may be referred to as a coding tree unit (CTU).
- the dividing unit 102 divides each of the fixed size blocks into blocks of a variable size (for example, 64 ⁇ 64 or less) based on recursive quadtree and / or binary tree block division.
- This variable size block may be referred to as a coding unit (CU), a prediction unit (PU) or a transform unit (TU).
- CU, PU, and TU do not need to be distinguished, and some or all blocks in a picture may be processing units of CU, PU, and TU.
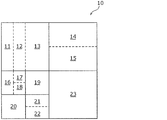
- FIG. 2 is a diagram showing an example of block division in the first embodiment.
- a solid line represents a block boundary by quadtree block division
- a broken line represents a block boundary by binary tree block division.
- the block 10 is a 128 ⁇ 128 pixel square block (128 ⁇ 128 block).
- the 128 ⁇ 128 block 10 is first divided into four square 64 ⁇ 64 blocks (quadtree block division).
- the upper left 64 ⁇ 64 block is further divided vertically into two rectangular 32 ⁇ 64 blocks, and the left 32 ⁇ 64 block is further divided vertically into two rectangular 16 ⁇ 64 blocks (binary tree block division). As a result, the upper left 64 ⁇ 64 block is divided into two 16 ⁇ 64 blocks 11 and 12 and a 32 ⁇ 64 block 13.
- the upper right 64 ⁇ 64 block is horizontally divided into two rectangular 64 ⁇ 32 blocks 14 and 15 (binary tree block division).
- the lower left 64x64 block is divided into four square 32x32 blocks (quadrant block division). Of the four 32 ⁇ 32 blocks, the upper left block and the lower right block are further divided.
- the upper left 32 ⁇ 32 block is vertically divided into two rectangular 16 ⁇ 32 blocks, and the right 16 ⁇ 32 block is further divided horizontally into two 16 ⁇ 16 blocks (binary tree block division).
- the lower right 32 ⁇ 32 block is horizontally divided into two 32 ⁇ 16 blocks (binary tree block division).
- the lower left 64 ⁇ 64 block is divided into a 16 ⁇ 32 block 16, two 16 ⁇ 16 blocks 17 and 18, two 32 ⁇ 32 blocks 19 and 20, and two 32 ⁇ 16 blocks 21 and 22.
- the lower right 64x64 block 23 is not divided.
- the block 10 is divided into 13 variable-size blocks 11 to 23 based on the recursive quadtree and binary tree block division.
- Such division may be called QTBT (quad-tree plus binary tree) division.
- one block is divided into four or two blocks (quadrature tree or binary tree block division), but the division is not limited to this.
- one block may be divided into three blocks (triple tree block division).
- Such a division including a tri-tree block division may be called an MBT (multi type tree) division.
- the subtraction unit 104 subtracts the prediction signal (prediction sample) from the original signal (original sample) in units of blocks divided by the division unit 102. That is, the subtraction unit 104 calculates a prediction error (also referred to as a residual) of a coding target block (hereinafter referred to as a current block). Then, the subtraction unit 104 outputs the calculated prediction error to the conversion unit 106.
- a prediction error also referred to as a residual of a coding target block (hereinafter referred to as a current block).
- the original signal is an input signal of the encoding device 100, and is a signal (for example, a luminance (luma) signal and two color difference (chroma) signals) representing an image of each picture constituting the moving image.
- a signal representing an image may be referred to as a sample.
- the transform unit 106 transforms the prediction error in the spatial domain into a transform factor in the frequency domain, and outputs the transform coefficient to the quantization unit 108. Specifically, the transform unit 106 performs, for example, a predetermined discrete cosine transform (DCT) or discrete sine transform (DST) on a prediction error in the spatial domain.
- DCT discrete cosine transform
- DST discrete sine transform
- the conversion unit 106 adaptively selects a conversion type from a plurality of conversion types, and converts a prediction error into a conversion coefficient using a conversion basis function corresponding to the selected conversion type. May be. Such a conversion may be referred to as EMT (explicit multiple core transform) or AMT (adaptive multiple transform).
- the plurality of conversion types include, for example, DCT-II, DCT-V, DCT-VIII, DST-I and DST-VII.
- FIG. 3 is a table showing conversion basis functions corresponding to each conversion type. In FIG. 3, N indicates the number of input pixels. Selection of a conversion type from among these multiple conversion types may depend on, for example, the type of prediction (intra prediction and inter prediction), or may depend on an intra prediction mode.
- Information indicating whether or not to apply such EMT or AMT (for example, called an AMT flag) and information indicating the selected conversion type are signaled at the CU level.
- AMT flag information indicating whether or not to apply such EMT or AMT
- the signalization of these pieces of information need not be limited to the CU level, but may be other levels (for example, a sequence level, a picture level, a slice level, a tile level, or a CTU level).
- the conversion unit 106 may reconvert the conversion coefficient (conversion result). Such reconversion is sometimes referred to as AST (adaptive secondary transform) or NSST (non-separable secondary transform). For example, the conversion unit 106 performs re-conversion for each sub-block (for example, 4 ⁇ 4 sub-block) included in the block of the conversion coefficient corresponding to the intra prediction error. Information indicating whether or not NSST is applied and information related to the transformation matrix used for NSST are signaled at the CU level. Note that the signalization of these pieces of information need not be limited to the CU level, but may be other levels (for example, a sequence level, a picture level, a slice level, a tile level, or a CTU level).
- the separable conversion is a method of performing the conversion a plurality of times by separating the number of dimensions of the input for each direction, and the non-separable conversion is two or more when the input is multidimensional.
- the dimensions are collectively regarded as one dimension, and conversion is performed collectively.
- non-separable conversion if an input is a 4 ⁇ 4 block, it is regarded as one array having 16 elements, and 16 ⁇ 16 conversion is performed on the array. The thing which performs the conversion process with a matrix is mentioned.
- a 4 ⁇ 4 input block is regarded as a single array having 16 elements, and then the Givens rotation is performed multiple times on the array (Hypercube Givens Transform) is also a non-separable. It is an example of conversion.
- the quantization unit 108 quantizes the transform coefficient output from the transform unit 106. Specifically, the quantization unit 108 scans the transform coefficients of the current block in a predetermined scanning order, and quantizes the transform coefficients based on the quantization parameter (QP) corresponding to the scanned transform coefficients. Then, the quantization unit 108 outputs the quantized transform coefficient (hereinafter referred to as a quantization coefficient) of the current block to the entropy encoding unit 110 and the inverse quantization unit 112.
- QP quantization parameter
- the predetermined order is an order for quantization / inverse quantization of transform coefficients.
- the predetermined scanning order is defined in ascending order of frequency (order from low frequency to high frequency) or descending order (order from high frequency to low frequency).
- the quantization parameter is a parameter that defines a quantization step (quantization width). For example, if the value of the quantization parameter increases, the quantization step also increases. That is, if the value of the quantization parameter increases, the quantization error increases.
- the entropy encoding unit 110 generates an encoded signal (encoded bit stream) by performing variable length encoding on the quantization coefficient that is input from the quantization unit 108. Specifically, the entropy encoding unit 110 binarizes the quantization coefficient, for example, and arithmetically encodes the binary signal.
- the inverse quantization unit 112 inversely quantizes the quantization coefficient that is an input from the quantization unit 108. Specifically, the inverse quantization unit 112 inversely quantizes the quantization coefficient of the current block in a predetermined scanning order. Then, the inverse quantization unit 112 outputs the inverse-quantized transform coefficient of the current block to the inverse transform unit 114.
- the inverse transform unit 114 restores the prediction error by inverse transforming the transform coefficient that is an input from the inverse quantization unit 112. Specifically, the inverse transform unit 114 restores the prediction error of the current block by performing an inverse transform corresponding to the transform by the transform unit 106 on the transform coefficient. Then, the inverse transformation unit 114 outputs the restored prediction error to the addition unit 116.
- the restored prediction error does not match the prediction error calculated by the subtraction unit 104 because information is lost due to quantization. That is, the restored prediction error includes a quantization error.
- the adder 116 reconstructs the current block by adding the prediction error input from the inverse transform unit 114 and the prediction sample input from the prediction control unit 128. Then, the adding unit 116 outputs the reconfigured block to the block memory 118 and the loop filter unit 120.
- the reconstructed block is sometimes referred to as a local decoding block.
- the block memory 118 is a storage unit for storing blocks in an encoding target picture (hereinafter referred to as current picture) that are referred to in intra prediction. Specifically, the block memory 118 stores the reconstructed block output from the adding unit 116.
- the loop filter unit 120 applies a loop filter to the block reconstructed by the adding unit 116 and outputs the filtered reconstructed block to the frame memory 122.
- the loop filter is a filter (in-loop filter) used in the encoding loop, and includes, for example, a deblocking filter (DF), a sample adaptive offset (SAO), an adaptive loop filter (ALF), and the like.
- a least square error filter is applied to remove coding distortion. For example, for each 2 ⁇ 2 sub-block in the current block, a plurality of multiples based on the direction of the local gradient and the activity are provided. One filter selected from the filters is applied.
- sub-blocks for example, 2 ⁇ 2 sub-blocks
- a plurality of classes for example, 15 or 25 classes.
- the direction value D of the gradient is derived, for example, by comparing gradients in a plurality of directions (for example, horizontal, vertical, and two diagonal directions).
- the gradient activation value A is derived, for example, by adding gradients in a plurality of directions and quantizing the addition result.
- a filter for a sub-block is determined from among a plurality of filters.
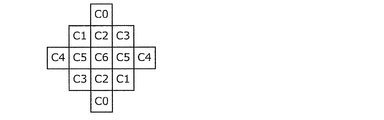
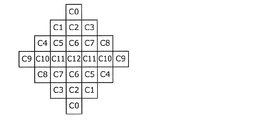
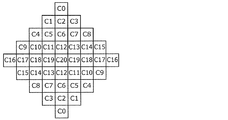
- FIG. 4A to 4C are diagrams showing a plurality of examples of filter shapes used in ALF.
- 4A shows a 5 ⁇ 5 diamond shape filter
- FIG. 4B shows a 7 ⁇ 7 diamond shape filter
- FIG. 4C shows a 9 ⁇ 9 diamond shape filter.
- Information indicating the shape of the filter is signalized at the picture level. It should be noted that the signalization of the information indicating the filter shape need not be limited to the picture level, but may be another level (for example, a sequence level, a slice level, a tile level, a CTU level, or a CU level).
- ON / OFF of ALF is determined at the picture level or the CU level, for example. For example, for luminance, it is determined whether to apply ALF at the CU level, and for color difference, it is determined whether to apply ALF at the picture level.
- Information indicating ALF on / off is signaled at the picture level or the CU level. Signaling of information indicating ALF on / off need not be limited to the picture level or the CU level, and may be performed at other levels (for example, a sequence level, a slice level, a tile level, or a CTU level). Good.
- a coefficient set of a plurality of selectable filters (for example, up to 15 or 25 filters) is signalized at the picture level.
- the signalization of the coefficient set need not be limited to the picture level, but may be another level (for example, sequence level, slice level, tile level, CTU level, CU level, or sub-block level).
- the frame memory 122 is a storage unit for storing a reference picture used for inter prediction, and is sometimes called a frame buffer. Specifically, the frame memory 122 stores the reconstructed block filtered by the loop filter unit 120.
- the intra prediction unit 124 generates a prediction signal (intra prediction signal) by referring to the block in the current picture stored in the block memory 118 and performing intra prediction (also referred to as intra-screen prediction) of the current block. Specifically, the intra prediction unit 124 generates an intra prediction signal by performing intra prediction with reference to a sample (for example, luminance value and color difference value) of a block adjacent to the current block, and performs prediction control on the intra prediction signal. To the unit 128.
- the intra prediction unit 124 performs intra prediction using one of a plurality of predefined intra prediction modes.
- the plurality of intra prediction modes include one or more non-directional prediction modes and a plurality of directional prediction modes.
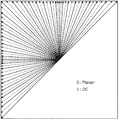
- One or more non-directional prediction modes are for example H.264. It includes Planar prediction mode and DC prediction mode defined by H.265 / HEVC (High-Efficiency Video Coding) standard (Non-patent Document 1).
- the multiple directionality prediction modes are for example H.264. It includes 33-direction prediction modes defined in the H.265 / HEVC standard. In addition to the 33 directions, the plurality of directionality prediction modes may further include 32 direction prediction modes (a total of 65 directionality prediction modes).
- FIG. 5A is a diagram illustrating 67 intra prediction modes (two non-directional prediction modes and 65 directional prediction modes) in intra prediction. The solid line arrows The 33 directions defined in the H.265 / HEVC standard are represented, and the dashed arrow represents the added 32 directions.
- the luminance block may be referred to in the intra prediction of the color difference block. That is, the color difference component of the current block may be predicted based on the luminance component of the current block.
- Such intra prediction is sometimes called CCLM (cross-component linear model) prediction.
- the intra prediction mode (for example, called CCLM mode) of the color difference block which refers to such a luminance block may be added as one of the intra prediction modes of the color difference block.
- the intra prediction unit 124 may correct the pixel value after intra prediction based on the gradient of the reference pixel in the horizontal / vertical direction. Intra prediction with such correction may be called PDPC (position dependent intra prediction combination). Information indicating whether or not PDPC is applied (for example, referred to as a PDPC flag) is signaled, for example, at the CU level.
- the signalization of this information need not be limited to the CU level, but may be another level (for example, a sequence level, a picture level, a slice level, a tile level, or a CTU level).
- the inter prediction unit 126 refers to a reference picture stored in the frame memory 122 and is different from the current picture, and performs inter prediction (also referred to as inter-screen prediction) of the current block, thereby generating a prediction signal (inter prediction signal). Prediction signal). Inter prediction is performed in units of a current block or a sub-block (for example, 4 ⁇ 4 block) in the current block. For example, the inter prediction unit 126 performs motion estimation in the reference picture for the current block or sub-block. Then, the inter prediction unit 126 generates an inter prediction signal of the current block or sub-block by performing motion compensation using motion information (for example, a motion vector) obtained by motion search. Then, the inter prediction unit 126 outputs the generated inter prediction signal to the prediction control unit 128.
- inter prediction also referred to as inter-screen prediction
- a motion vector predictor may be used for signalizing the motion vector. That is, the difference between the motion vector and the predicted motion vector may be signaled.
- an inter prediction signal may be generated using not only the motion information of the current block obtained by motion search but also the motion information of adjacent blocks. Specifically, the inter prediction signal is generated in units of sub-blocks in the current block by weighted addition of the prediction signal based on the motion information obtained by motion search and the prediction signal based on the motion information of adjacent blocks. May be.
- Such inter prediction motion compensation
- OBMC overlapped block motion compensation
- OBMC block size information indicating the size of a sub-block for OBMC
- OBMC flag information indicating whether or not to apply the OBMC mode
- the level of signalization of these information does not need to be limited to the sequence level and the CU level, and may be other levels (for example, a picture level, a slice level, a tile level, a CTU level, or a sub-block level). Good.
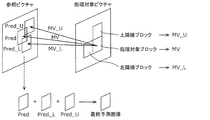
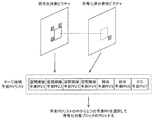
- FIG. 5B and FIG. 5C are a flowchart and a conceptual diagram for explaining the outline of the predicted image correction process by the OBMC process.
- a prediction image (Pred) by normal motion compensation is acquired using a motion vector (MV) assigned to an encoding target block.
- MV motion vector
- a prediction image (Pred_L) is obtained by applying the motion vector (MV_L) of the encoded left adjacent block to the encoding target block, and prediction is performed by superimposing the prediction image and Pred_L with weights. Perform the first correction of the image.
- the motion vector (MV_U) of the encoded upper adjacent block is applied to the block to be encoded to obtain a prediction image (Pred_U), and the prediction image and Pred_U that have been subjected to the first correction are weighted. Then, the second correction of the predicted image is performed by superimposing and making it the final predicted image.
- the two-step correction method using the left adjacent block and the upper adjacent block has been described here, the correction may be performed more times than the two steps using the right adjacent block and the lower adjacent block. Is possible.
- the area to be overlapped may not be the pixel area of the entire block, but only a part of the area near the block boundary.
- the processing target block may be a prediction block unit or a sub-block unit obtained by further dividing the prediction block.
- obmc_flag is a signal indicating whether or not to apply the OBMC process.
- the encoding apparatus it is determined whether or not the encoding target block belongs to a complex motion region, and if it belongs to a complex motion region, a value 1 is set as obmc_flag. Encoding is performed by applying the OBMC process, and if it does not belong to a complex region of motion, the value 0 is set as obmc_flag and the encoding is performed without applying the OBMC process.
- the decoding apparatus by decoding the obmc_flag described in the stream, decoding is performed by switching whether to apply the OBMC process according to the value.
- the motion information may be derived on the decoding device side without being converted into a signal.
- H.M. A merge mode defined in the H.265 / HEVC standard may be used.
- the motion information may be derived by performing motion search on the decoding device side. In this case, motion search is performed without using the pixel value of the current block.
- the mode in which motion search is performed on the decoding device side is sometimes called a PMMVD (patterned motion vector derivation) mode or an FRUC (frame rate up-conversion) mode.
- PMMVD patterned motion vector derivation
- FRUC frame rate up-conversion
- FIG. 5D An example of FRUC processing is shown in FIG. 5D.
- a list of a plurality of candidates each having a predicted motion vector (may be common with the merge list) is generated Is done.
- the best candidate MV is selected from a plurality of candidate MVs registered in the candidate list. For example, the evaluation value of each candidate included in the candidate list is calculated, and one candidate is selected based on the evaluation value.
- a motion vector for the current block is derived based on the selected candidate motion vector.
- the selected candidate motion vector (best candidate MV) is directly derived as a motion vector for the current block.
- the motion vector for the current block may be derived by performing pattern matching in the peripheral region at the position in the reference picture corresponding to the selected candidate motion vector. That is, the same method is used to search the area around the best candidate MV, and if there is an MV with a good evaluation value, the best candidate MV is updated to the MV, and the current block is updated. The final MV may be used. It is also possible to adopt a configuration in which the processing is not performed.
- the same processing may be performed when processing is performed in units of sub-blocks.
- the evaluation value is calculated by obtaining a difference value of the reconstructed image by pattern matching between a region in the reference picture corresponding to the motion vector and a predetermined region. Note that the evaluation value may be calculated using information other than the difference value.
- the first pattern matching and the second pattern matching may be referred to as bilateral matching and template matching, respectively.
- pattern matching is performed between two blocks in two different reference pictures that follow the motion trajectory of the current block. Therefore, in the first pattern matching, a region in another reference picture along the motion trajectory of the current block is used as the predetermined region for calculating the candidate evaluation value described above.
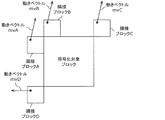
- FIG. 6 is a diagram for explaining an example of pattern matching (bilateral matching) between two blocks along a motion trajectory.
- first pattern matching two blocks along the motion trajectory of the current block (Cur block) and two blocks in two different reference pictures (Ref0, Ref1) are used.
- two motion vectors MV0, MV1 are derived.
- MV0, MV1 a reconstructed image at a designated position in the first encoded reference picture (Ref0) designated by the candidate MV, and a symmetric MV obtained by scaling the candidate MV at a display time interval.
- the difference from the reconstructed image at the designated position in the second encoded reference picture (Ref1) designated in (2) is derived, and the evaluation value is calculated using the obtained difference value.
- the candidate MV having the best evaluation value among the plurality of candidate MVs may be selected as the final MV.
- the motion vectors (MV0, MV1) pointing to the two reference blocks are temporal distances between the current picture (Cur Pic) and the two reference pictures (Ref0, Ref1). It is proportional to (TD0, TD1).
- the first pattern matching uses a mirror-symmetric bi-directional motion vector Is derived.
- pattern matching is performed between a template in the current picture (a block adjacent to the current block in the current picture (for example, an upper and / or left adjacent block)) and a block in the reference picture. Therefore, in the second pattern matching, a block adjacent to the current block in the current picture is used as the predetermined region for calculating the candidate evaluation value described above.
- FIG. 7 is a diagram for explaining an example of pattern matching (template matching) between a template in the current picture and a block in the reference picture.
- the current block is searched by searching the reference picture (Ref0) for the block that most closely matches the block adjacent to the current block (Cur block) in the current picture (Cur Pic).
- Ref0 the reference picture
- the reconstructed image of the encoded region of the left adjacent area and / or the upper adjacent area, and the equivalent in the encoded reference picture (Ref0) designated by the candidate MV When a difference from the reconstructed image at the position is derived, an evaluation value is calculated using the obtained difference value, and a candidate MV having the best evaluation value among a plurality of candidate MVs is selected as the best candidate MV. Good.
- FRUC flag Information indicating whether or not to apply such FRUC mode
- FRUC flag information indicating whether or not to apply such FRUC mode
- the FRUC mode is applied (for example, when the FRUC flag is true)
- information indicating the pattern matching method (first pattern matching or second pattern matching) (for example, called the FRUC mode flag) is signaled at the CU level. It becomes. Note that the signalization of these pieces of information need not be limited to the CU level, but may be other levels (for example, sequence level, picture level, slice level, tile level, CTU level, or sub-block level). .
- BIO bi-directional optical flow
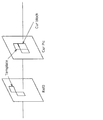
- FIG. 8 is a diagram for explaining a model assuming constant velocity linear motion.
- (v x , v y ) indicates a velocity vector
- ⁇ 0 and ⁇ 1 are the time between the current picture (Cur Pic) and two reference pictures (Ref 0 , Ref 1 ), respectively.
- the distance. (MVx 0 , MVy 0 ) indicates a motion vector corresponding to the reference picture Ref 0
- (MVx 1 , MVy 1 ) indicates a motion vector corresponding to the reference picture Ref 1 .
- This optical flow equation consists of (i) the product of the time derivative of the luminance value, (ii) the horizontal component of the horizontal velocity and the spatial gradient of the reference image, and (iii) the vertical velocity and the spatial gradient of the reference image. Indicates that the sum of the products of the vertical components of is equal to zero. Based on a combination of this optical flow equation and Hermite interpolation, a block-based motion vector obtained from a merge list or the like is corrected in pixel units.
- the motion vector may be derived on the decoding device side by a method different from the derivation of the motion vector based on the model assuming constant velocity linear motion.
- a motion vector may be derived for each subblock based on the motion vectors of a plurality of adjacent blocks.
- This mode may be referred to as an affine motion compensation prediction mode.
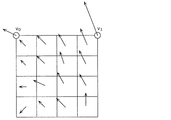
- FIG. 9A is a diagram for explaining derivation of a motion vector in units of sub-blocks based on motion vectors of a plurality of adjacent blocks.
- the current block includes 16 4 ⁇ 4 sub-blocks.
- the motion vector v 0 of the upper left corner control point of the current block is derived based on the motion vector of the adjacent block
- the motion vector v 1 of the upper right corner control point of the current block is derived based on the motion vector of the adjacent sub block. Is done.
- the motion vector (v x , v y ) of each sub-block in the current block is derived by the following equation (2).
- x and y indicate the horizontal position and vertical position of the sub-block, respectively, and w indicates a predetermined weight coefficient.
- Such an affine motion compensation prediction mode may include several modes in which the motion vector derivation methods of the upper left and upper right corner control points are different.
- Information indicating such an affine motion compensation prediction mode (for example, called an affine flag) is signaled at the CU level. Note that the information indicating the affine motion compensation prediction mode need not be limited to the CU level, but other levels (for example, sequence level, picture level, slice level, tile level, CTU level, or sub-block level). ).
- the prediction control unit 128 selects either the intra prediction signal or the inter prediction signal, and outputs the selected signal to the subtraction unit 104 and the addition unit 116 as a prediction signal.
- FIG. 9B is a diagram for explaining the outline of the motion vector deriving process in the merge mode.
- a prediction MV list in which prediction MV candidates are registered is generated.
- prediction MV candidates spatial adjacent prediction MVs that are MVs of a plurality of encoded blocks located spatially around the encoding target block, and the position of the encoding target block in the encoded reference picture are projected.
- Temporal adjacent prediction MV that is MV of neighboring blocks combined prediction MV that is MV generated by combining MV values of spatial adjacent prediction MV and temporal adjacent prediction MV, zero prediction MV that is MV having a value of zero, and the like There is.
- variable length encoding unit describes and encodes merge_idx which is a signal indicating which prediction MV is selected in the stream.
- the prediction MV registered in the prediction MV list described with reference to FIG. 9B is an example, and the number of prediction MVs may be different from the number in the figure, or may not include some types of prediction MVs in the figure. It may be the composition which added prediction MV other than the kind of prediction MV in a figure.
- the final MV may be determined by performing DMVR processing, which will be described later, using the MV of the encoding target block derived by the merge mode.
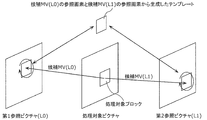
- FIG. 9C is a conceptual diagram for explaining an outline of DMVR processing.
- the optimal MVP set in the processing target block is set as a candidate MV, and reference pixels from a first reference picture that is a processed picture in the L0 direction and a second reference picture that is a processed picture in the L1 direction are set according to the candidate MV. Are obtained, and a template is generated by taking the average of each reference pixel.
- the peripheral areas of the candidate MVs of the first reference picture and the second reference picture are searched, respectively, and the MV with the lowest cost is determined as the final MV.
- the cost value is calculated using a difference value between each pixel value of the template and each pixel value of the search area, an MV value, and the like.
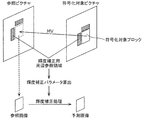
- FIG. 9D is a diagram for explaining an outline of a predicted image generation method using luminance correction processing by LIC processing.
- an MV for obtaining a reference image corresponding to a block to be encoded is derived from a reference picture that is an encoded picture.
- the predicted image for the encoding target block is generated by performing the brightness correction process using the brightness correction parameter for the reference image in the reference picture specified by MV.
- the shape of the peripheral reference region in FIG. 9D is an example, and other shapes may be used.
- the process of generating a predicted image from one reference picture has been described, but the same applies to the case of generating a predicted image from a plurality of reference pictures, and the same applies to reference images acquired from each reference picture.
- the predicted image is generated after performing the luminance correction processing by the method.
- lic_flag is a signal indicating whether to apply LIC processing.
- the encoding device it is determined whether or not the encoding target block belongs to an area where the luminance change occurs, and if it belongs to the area where the luminance change occurs, lic_flag is set. Encode by applying LIC processing with a value of 1 set, and if not belonging to an area where a luminance change has occurred, set 0 as lic_flag and perform encoding without applying the LIC processing .
- the decoding device by decoding lic_flag described in the stream, decoding is performed by switching whether to apply the LIC processing according to the value.
- a method for determining whether or not to apply LIC processing for example, there is a method for determining whether or not LIC processing has been applied to peripheral blocks.
- the encoding target block is in the merge mode
- whether or not the surrounding encoded blocks selected in the derivation of the MV in the merge mode processing are encoded by applying the LIC processing. Judgment is performed, and encoding is performed by switching whether to apply the LIC processing according to the result.
- the decoding process is exactly the same.
- FIG. 10 is a block diagram showing a functional configuration of decoding apparatus 200 according to Embodiment 1.
- the decoding device 200 is a moving image / image decoding device that decodes moving images / images in units of blocks.
- the decoding device 200 includes an entropy decoding unit 202, an inverse quantization unit 204, an inverse transformation unit 206, an addition unit 208, a block memory 210, a loop filter unit 212, and a frame memory 214. And an intra prediction unit 216, an inter prediction unit 218, and a prediction control unit 220.
- the decoding device 200 is realized by, for example, a general-purpose processor and a memory.
- the processor executes the entropy decoding unit 202, the inverse quantization unit 204, the inverse transformation unit 206, the addition unit 208, the loop filter unit 212, and the intra prediction unit. 216, the inter prediction unit 218, and the prediction control unit 220.
- the decoding apparatus 200 is dedicated to the entropy decoding unit 202, the inverse quantization unit 204, the inverse transformation unit 206, the addition unit 208, the loop filter unit 212, the intra prediction unit 216, the inter prediction unit 218, and the prediction control unit 220. It may be realized as one or more electronic circuits.
- the entropy decoding unit 202 performs entropy decoding on the encoded bit stream. Specifically, the entropy decoding unit 202 performs arithmetic decoding from a coded bit stream to a binary signal, for example. Then, the entropy decoding unit 202 debinarizes the binary signal. As a result, the entropy decoding unit 202 outputs the quantized coefficient to the inverse quantization unit 204 in units of blocks.
- the inverse quantization unit 204 inversely quantizes the quantization coefficient of a decoding target block (hereinafter referred to as a current block) that is an input from the entropy decoding unit 202. Specifically, the inverse quantization unit 204 inversely quantizes each quantization coefficient of the current block based on the quantization parameter corresponding to the quantization coefficient. Then, the inverse quantization unit 204 outputs the quantization coefficient (that is, the transform coefficient) obtained by inverse quantization of the current block to the inverse transform unit 206.
- a decoding target block hereinafter referred to as a current block
- the inverse quantization unit 204 inversely quantizes each quantization coefficient of the current block based on the quantization parameter corresponding to the quantization coefficient. Then, the inverse quantization unit 204 outputs the quantization coefficient (that is, the transform coefficient) obtained by inverse quantization of the current block to the inverse transform unit 206.
- the inverse transform unit 206 restores the prediction error by inverse transforming the transform coefficient that is an input from the inverse quantization unit 204.
- the inverse conversion unit 206 determines the current block based on the information indicating the read conversion type. Inversely transform the conversion coefficient of.
- the inverse transform unit 206 applies inverse retransformation to the transform coefficient.
- the adder 208 reconstructs the current block by adding the prediction error input from the inverse converter 206 and the prediction sample input from the prediction controller 220. Then, the adding unit 208 outputs the reconfigured block to the block memory 210 and the loop filter unit 212.
- the block memory 210 is a storage unit for storing a block that is referred to in intra prediction and that is within a decoding target picture (hereinafter referred to as a current picture). Specifically, the block memory 210 stores the reconstructed block output from the adding unit 208.
- the loop filter unit 212 applies a loop filter to the block reconstructed by the adding unit 208, and outputs the filtered reconstructed block to the frame memory 214, the display device, and the like.
- one filter is selected from the plurality of filters based on the local gradient direction and activity, The selected filter is applied to the reconstruction block.
- the frame memory 214 is a storage unit for storing a reference picture used for inter prediction, and is sometimes called a frame buffer. Specifically, the frame memory 214 stores the reconstructed block filtered by the loop filter unit 212.
- the intra prediction unit 216 performs intra prediction with reference to the block in the current picture stored in the block memory 210 based on the intra prediction mode read from the encoded bitstream, so that a prediction signal (intra prediction Signal). Specifically, the intra prediction unit 216 generates an intra prediction signal by performing intra prediction with reference to a sample (for example, luminance value and color difference value) of a block adjacent to the current block, and performs prediction control on the intra prediction signal. Output to the unit 220.
- a prediction signal for example, luminance value and color difference value
- the intra prediction unit 216 may predict the color difference component of the current block based on the luminance component of the current block.
- the intra prediction unit 216 corrects the pixel value after intra prediction based on the gradient of the reference pixel in the horizontal / vertical direction.
- the inter prediction unit 218 refers to the reference picture stored in the frame memory 214 and predicts the current block. Prediction is performed in units of a current block or a sub-block (for example, 4 ⁇ 4 block) in the current block. For example, the inter prediction unit 218 generates an inter prediction signal of the current block or sub-block by performing motion compensation using motion information (for example, a motion vector) read from the encoded bitstream, and generates the inter prediction signal. The result is output to the prediction control unit 220.
- motion information for example, a motion vector
- the inter prediction unit 218 When the information read from the encoded bitstream indicates that the OBMC mode is to be applied, the inter prediction unit 218 includes not only the motion information of the current block obtained by motion search but also the motion information of adjacent blocks. To generate an inter prediction signal.
- the inter prediction unit 218 follows the pattern matching method (bilateral matching or template matching) read from the encoded stream. Motion information is derived by performing motion search. Then, the inter prediction unit 218 performs motion compensation using the derived motion information.
- the inter prediction unit 218 derives a motion vector based on a model assuming constant velocity linear motion. Also, when the information read from the encoded bitstream indicates that the affine motion compensated prediction mode is applied, the inter prediction unit 218 determines the motion vector in units of subblocks based on the motion vectors of a plurality of adjacent blocks. Is derived.
- the prediction control unit 220 selects either the intra prediction signal or the inter prediction signal, and outputs the selected signal to the adding unit 208 as a prediction signal.
- Predictive motion vector-related processing in encoding apparatus and decoding apparatus H.
- moving picture coding schemes such as H.264 and HEVC
- three types of picture types i.e., I picture, P picture, and B picture, are used to compress the amount of information.
- An I picture is encoded by intra picture prediction.
- Intra-picture prediction is also called inter-screen prediction or intra prediction.
- the P picture is encoded by inter prediction that refers to one picture that has already been encoded ahead or behind the current picture in display time order.
- the B picture is encoded by inter prediction that refers to two already encoded pictures ahead or behind the current picture in display time order.
- a reference picture list for specifying a reference picture is generated.
- a reference picture index is assigned to an encoded reference picture that is referred to in inter prediction.
- two reference picture lists (L0 reference picture list and L1 reference picture list) are generated.
- a prediction motion vector designation mode exists for a method of coding a motion vector of an encoding target block in a B picture or a P picture.
- the prediction motion vector designation mode an adjacent block that is a block adjacent to the encoding target block and a co-located block that is the same position as the encoding target block in the reference picture are used.
- predicted motion vector candidates are derived from the motion vectors used for encoding each of the adjacent block and the co-located block.
- a motion vector predictor candidate is also called a candidate motion vector.
- blocks such as an adjacent block and a co-located block used for derivation of a motion vector predictor candidate are also called candidate blocks.
- a motion vector predictor is selected from a plurality of motion vector predictor candidates, and the motion vector of the block to be encoded is encoded. At that time, an index of the selected motion vector predictor is added to the bitstream.
- TMVP Temporal Motion Vector Prediction
- the co-located block may be referred to as a Col block.
- the motion vector and reference picture of each block mean a motion vector and reference picture used (or used) for inter prediction of the block.
- FIG. 11 is a conceptual diagram showing adjacent blocks and motion vectors of adjacent blocks.
- four adjacent blocks A, B, C, and D are four blocks adjacent to the encoding target block.
- Four predicted motion vector candidates may be derived from the four motion vectors mvA, mvB, mvC, and mvD of the four adjacent blocks A, B, C, and D.
- the motion vector mvA of the adjacent block A may be derived as a predicted motion vector candidate as it is.
- the motion vector mvA of the adjacent block A may be scaled, and the scaled motion vector mvA may be derived as a predicted motion vector candidate.
- the scaling of the motion vector is to expand and contract the magnitude of the motion vector, and also includes inverting the motion vector using a negative ratio.
- the ratio of the time difference from the encoding target picture to the reference picture of the encoding target block with respect to the time difference from the encoding target picture to the reference picture of the adjacent block A may be used.
- the time difference from the first picture to the second picture is a value obtained by subtracting the display order of the first picture from the display order of the second picture, and can take a negative value.
- a predicted motion vector candidate can be derived from each of the motion vectors mvB, mvC, and mvD of the adjacent blocks B, C, and D.
- FIG. 12 is a conceptual diagram showing the Col block and the motion vector of the Col block. Note that each picture is two-dimensional, but each picture in FIG. 12 and the like is represented in one dimension for convenience of explanation.
- the Col block is encoded with reference to the first reference picture using the motion vector mvCol.
- a motion vector predictor candidate is derived from the motion vector mvCol of the Col block.
- the motion vector mvCol of the Col block may be derived as a predicted motion vector candidate as it is.
- the motion vector mvCol of the Col block may be scaled, and the scaled motion vector mvCol may be derived as a predicted motion vector candidate.
- the ratio of the time difference from the encoding target picture to the reference picture of the encoding target block with respect to the time difference from the second reference picture including the Col block to the reference picture of the Col block may be used.
- HEVC's next-generation video coding system is currently being studied by JVET (Joint Video Exploration Team), which is a joint study group of MPEG and ITU-T.
- JVET Joint Video Exploration Team
- ATMVP Advanced Temporary Motion Vector Prediction
- the motion vector of the encoding target block is provisionally determined based on the motion vector of the adjacent block. Then, the block pointed to by the temporarily determined motion vector is defined as an ATMVP block. Then, a motion vector (ATMV: Advanced Temporary Motion Vector) in the ATMVP block is used as a predicted motion vector candidate.
- ATMVP Advanced Temporary Motion Vector
- an ATMVP block may be called an Adv block.
- the ATMVP block is an example of a candidate block used for deriving candidate motion vectors.
- FIG. 13 is a conceptual diagram showing Adv blocks and motion vectors of Adv blocks.
- the motion vector mvD of the adjacent block D shown in FIG. 11 is provisionally determined as the motion vector of the encoding target block.
- the block pointed from the encoding target block by the motion vector mvD is determined as an Adv block.
- the Adv block is included in the second reference picture. That is, the reference picture including the Adv block is indicated by the reference picture index indicating the reference picture of the adjacent block D. Then, a motion vector predictor candidate is derived from the motion vector mvAdv of the Adv block.
- the motion vector mvAdv of the Adv block may be derived as a predicted motion vector candidate as it is.
- the motion vector mvAdv of the Adv block may be scaled, and the scaled motion vector mvAdv may be derived as a predicted motion vector candidate.
- a ratio of the time difference from the encoding target picture to the reference picture of the encoding target block with respect to the time difference from the second reference picture including the Adv block to the reference picture of the Adv block may be used.
- the Adv block follows the movement of the moving object and is positioned at the same position as the encoding target block within the range of the moving object. Can be.
- Such a motion vector of the Adv block may have the same characteristics as the motion vector of the encoding target block. Therefore, an appropriate predicted motion vector candidate can be derived from the motion vector mvAdv of the Adv block.
- the motion vector mvD and the second reference picture used for the inter prediction of the adjacent block D may not be used as they are.
- the Adv block may be defined in a reference picture different from the second reference picture used for inter prediction of the adjacent block D.
- the Adv block may be defined in a reference picture immediately before or after the encoding target picture.
- scaling is applied to the motion vector mvD used for the inter prediction of the adjacent block D, and the Adv block may be determined using the motion vector mvD to which the scaling is applied.
- the ratio of the time difference from the encoding target picture to the reference picture in which the Adv block is defined with respect to the time difference from the encoding target picture to the second reference picture used for inter prediction of the adjacent block D is used. May be.
- the motion vector of the encoding target block is provisionally determined based on the motion vector of the adjacent block, and the block pointed to by the provisionally determined motion vector is the ATMVP.
- the block pointed to by the provisionally determined motion vector is the ATMVP.
- a block that is, a single ATMVP block is defined.
- a motion vector predictor candidate is derived from the motion vector of a single ATMVP block.
- TMVP TMVP
- a single co-located block is defined, and a motion vector predictor candidate is derived from the motion vector of the single co-located block. That is, the predicted motion vector candidate is derived from the motion vector of a single block in both ATMVP and TMVP. Therefore, a motion vector predictor candidate is derived from only one of the blocks included in the L0 reference picture list and the block included in the L1 reference picture list.
- the predicted motion vector candidates derived as described above are not necessarily appropriate predicted motion vector candidates.
- the block to be encoded is located near the boundary of the range of the moving object in the image, and the motion within the range of the moving object is different from the motion outside the range of the moving object, the motion vector of the ATMVP block and the encoding There is a possibility that the motion vector of the target block greatly deviates.
- FIG. 14 is a conceptual diagram showing an example of the relationship between the encoding target block, the four adjacent blocks A, B, C, and D, and the range of the moving object.
- the encoding target block straddles the boundary of the range of the moving object, and most of the encoding target block is included in the range of the moving object.
- the adjacent block D is located outside the range of the moving object, and is specifically included in the background.
- FIG. 15 is a conceptual diagram showing an example of an inappropriate Adv block. Specifically, FIG. 15 illustrates an Adv block determined according to the motion vector mvD of the adjacent block D in the example of FIG.
- the Adv block When the Adv block is determined according to the motion vector mvD of the adjacent block D, the Adv block is located outside the range of the moving object and is likely to be included in the background. Therefore, in this case, the motion vector of the Adv block indicates the motion of the background, and most of the motion vectors do not correctly indicate the motion of the encoding target block included in the range of the moving object. Therefore, an appropriate predicted motion vector candidate is not derived from the motion vector of the Adv block.
- the encoding apparatus 100 and the decoding apparatus 200 use each of the blocks in the reference picture included in the L0 reference picture list and the blocks in the reference picture included in the L1 reference picture list. Predictive motion vector candidates are derived. Accordingly, the encoding device 100 and the decoding device 200 derive temporal prediction motion vector candidates that match the motion of the processing target block even when the processing target block is located near the boundary of the range of the moving object. The possibility can be increased.
- temporal motion vector predictor candidate is a motion vector predictor candidate derived from a block determined using a temporal relationship with the processing target block, and is also called a temporal motion vector candidate.
- a spatial prediction motion vector candidate is a prediction motion vector candidate derived from a block determined using a spatial relationship with the processing target block, and is also referred to as a spatial candidate motion vector.
- FIG. 16 is a block diagram more specifically showing the functional configuration of the encoding apparatus 100 shown in FIG. Compared with FIG. 1, FIG. 16 further shows a picture type determination unit 132, a candidate list generation unit 134, and a candidate block information memory 136. That is, the encoding apparatus 100 further includes a picture type determination unit 132, a candidate list generation unit 134, and a candidate block information memory 136.
- the encoding device 100 is realized by, for example, a general-purpose processor and a memory.
- the processor when the software program stored in the memory is executed by the processor, the processor further functions as a picture type determination unit 132, a candidate list generation unit 134, and the like.
- the encoding apparatus 100 may be realized as one or more dedicated electronic circuits corresponding to a plurality of components including the picture type determination unit 132 and the candidate list generation unit 134.
- the picture type determination unit 132 determines a picture type for each of a plurality of pictures constituting a moving image. For example, the picture type determination unit 132 determines a picture type of each picture by selecting a picture type for each picture from among three types of picture types, that is, an I picture, a P picture, and a B picture. The picture type determination unit 132 may determine the picture type according to the encoding order or display order of pictures.
- the picture type determination unit 132 inputs the picture type to the prediction control unit 128 by outputting the picture type determined for each picture.
- the prediction control unit 128 selects either an intra prediction signal or an inter prediction signal according to the input picture type, and outputs the selected signal as a prediction signal.
- the prediction control unit 128 selects an intra prediction signal and outputs an intra prediction signal.
- the prediction control unit 128 selects an inter prediction signal and outputs an inter prediction signal.
- the prediction control unit 128 may select either an intra prediction signal or an inter prediction signal for each block, and output the selected signal as a prediction signal.
- the candidate list generation unit 134 generates a list of candidate motion vectors. That is, the candidate list generation unit 134 generates a list composed of one or more candidate motion vectors. This list may also be expressed as a candidate list, a candidate motion vector list, or a predicted motion vector candidate list. Details of generation of this list will be described later with reference to FIGS. 18A to 30 and the like.
- the candidate list generation unit 134 inputs the candidate list to the inter prediction unit 126 by outputting the generated candidate list.
- the inter prediction unit 126 selects a predicted motion vector from one or more candidate motion vectors included in the input candidate list.
- the entropy encoding unit 110 calculates a prediction motion vector index that is an index of the selected prediction motion vector, and a difference between the selected prediction motion vector and the motion vector of the encoding target block. Encode the motion vector. For example, in the predicted motion vector designation mode, the entropy encoding unit 110 encodes a predicted motion vector index and a difference motion vector.
- the inter prediction unit 126 In the merge mode, the inter prediction unit 126 generates a prediction image using the selected prediction motion vector as the motion vector of the encoding target block. In the merge mode, the entropy encoding unit 110 encodes the predicted motion vector index without encoding the differential motion vector.
- the inter prediction unit 126 may generate a prediction image by selecting a prediction motion vector according to FRUC and using the selected prediction motion vector as a motion vector of the encoding target block.
- the entropy encoding unit 110 does not encode motion vector information such as a predicted motion vector index and a difference motion vector.
- the candidate block information memory 136 is a memory for storing information used for generating candidate motion vectors. Specifically, the candidate block information memory 136 stores information on candidate blocks in the current picture or reference picture.
- the candidate block information is, for example, information indicating a motion vector of the candidate block.
- the inter prediction unit 126 may store, in the candidate block information memory 136, information indicating a motion vector used for generating a predicted image of the encoding target block. Then, the candidate list generation unit 134 may refer to information stored in the candidate block information memory 136 as information on candidate blocks when generating predicted images of other encoding target blocks.
- the inter prediction unit 126 may include a candidate list generation unit 134, or may include a candidate block information memory 136. That is, the inter prediction unit 126 may play the role of the candidate list generation unit 134 or may play the role of the candidate block information memory 136.
- the inter prediction encoding is performed by the subtraction unit 104, the entropy encoding unit 110, the addition unit 116, the inter prediction unit 126, and the like. These components may constitute an inter prediction encoding unit.
- FIG. 17 is a block diagram showing more specifically the functional configuration of the decoding device 200 shown in FIG. Compared with FIG. 10, FIG. 17 further shows a candidate list generation unit 234 and a candidate block information memory 236. That is, the decoding device 200 further includes a candidate list generation unit 234 and a candidate block information memory 236.
- the decoding device 200 is realized by, for example, a general-purpose processor and a memory. In this case, when the software program stored in the memory is executed by the processor, the processor further functions as the candidate list generation unit 234 and the like.
- the decoding device 200 may be realized as one or more dedicated electronic circuits corresponding to a plurality of components including the candidate list generation unit 234 and the like.
- the candidate list generation unit 234 of the decoding device 200 operates in the same manner as the candidate list generation unit 134 of the encoding device 100. That is, the candidate list generation unit 234 generates a candidate list composed of one or more candidate motion vectors. Details of generation of the candidate list will be described later with reference to FIGS. 18A to 30 and the like. 18A to 30 and the like mainly show the operation of the encoding device 100, the decoding device 200 also operates in the same manner as the encoding device 100 with respect to generation of a candidate list. The encoding in these descriptions can be appropriately read as decoding.
- the candidate list generation unit 234 outputs the generated candidate list to input the candidate list to the inter prediction unit 218.
- the inter prediction unit 218 selects a predicted motion vector from one or more candidate motion vectors included in the input candidate list.
- the entropy decoding unit (variable length decoding unit) 202 decodes the predicted motion vector index and the difference motion vector in the predicted motion vector designation mode.
- the inter prediction unit 218 selects a motion vector predictor according to the motion vector predictor index.
- the inter prediction unit 218 derives the motion vector of the decoding target block by adding the selected prediction motion vector and the decoded difference motion vector. Further, the inter prediction unit 218 generates a prediction image of the decoding target block using the motion vector of the decoding target block.
- the entropy decoding unit 202 decodes the predicted motion vector index without decoding the difference motion vector. Also in this case, the inter prediction unit 218 selects a motion vector predictor according to the motion vector predictor index. Then, the inter prediction unit 218 generates a prediction image of the decoding target block using the selected prediction motion vector as the motion vector of the decoding target block.
- the inter prediction unit 218 may select a predicted motion vector according to FRUC, and generate a predicted image using the selected predicted motion vector as a motion vector of a decoding target block.
- the entropy decoding unit 202 does not decode motion vector information such as a predicted motion vector index and a difference motion vector.
- the candidate block information memory 236 is a memory for storing information used for generating candidate motion vectors. That is, the candidate block information memory 236 of the decoding device 200 plays the same role as the candidate block information memory 136 of the encoding device 100. Specifically, the candidate block information memory 236 stores information on candidate blocks in the decoding target picture or reference picture.
- the inter prediction unit 218 may store information indicating the motion vector used for generating the predicted image of the decoding target block in the candidate block information memory 236. Then, the candidate list generation unit 234 may refer to the information stored in the candidate block information memory 236 as information on candidate blocks when generating predicted images of other decoding target blocks.
- the entropy decoding unit 202 decodes the picture type of each picture. Then, the entropy decoding unit 202 inputs the picture type of each picture to the prediction control unit 220 by outputting the picture type of each picture. Similar to the prediction control unit 128 of the encoding apparatus 100, the prediction control unit 220 selects either an intra prediction signal or an inter prediction signal according to the input picture type, and outputs the selected signal as a prediction signal. .
- the inter prediction unit 218 may include a candidate list generation unit 234, or may include a candidate block information memory 236. That is, the inter prediction unit 218 may serve as the candidate list generation unit 234 or may serve as the candidate block information memory 236.
- the inter prediction decoding is performed by the entropy decoding unit 202, the adding unit 208, the inter prediction unit 218, and the like. These components may constitute an inter prediction decoding unit.
- an L0 reference picture list and an L1 reference picture list are determined for the encoding target picture.
- the temporal candidate motion vector is derived from each of the co-located block of the reference picture included in the L0 reference picture list and the co-located block of the reference picture included in the L1 reference picture list.
- the L0 reference picture list includes a reference picture preceding the encoding target picture in display order
- the L1 reference picture list includes a reference picture subsequent to the encoding target picture in display order.
- the present invention is not limited to this, and the L0 reference picture list may include a reference picture that is later in the display order than the encoding target picture, or the L1 reference picture list is earlier than the encoding target picture in the display order.
- a reference picture may be included.
- a reference picture included in the L0 reference picture list may be expressed as a reference picture L0 [n].
- a reference picture included in the L1 reference picture list may be expressed as a reference picture L1 [n].
- N in the reference pictures L0 [n] and L1 [n] is a reference picture index, and is an integer of 0 or more.
- the co-located block in the reference picture included in the L0 reference picture list may be called a Col0 block.
- a co-located block in a reference picture included in the L1 reference picture list may be referred to as a Col1 block.
- the Col0 block is included in the reference picture L0 [0] whose reference picture index is 0 in the L0 reference picture list, and is a block at the same position as the encoding target block.
- the Col1 block is included in the reference picture L1 [0] whose reference picture index is 0 in the L1 reference picture list, and is a block at the same position as the encoding target block.
- each of the Col0 block and the Col1 block is encoded by bi-prediction.
- FIG. 18A is a conceptual diagram showing candidate motion vectors derived from the bi-predictive Col0 block.
- reference pictures L0 [0] and L0 [1] included in the L0 reference picture list are positioned before the current picture to be encoded, and reference pictures L1 [0] and L1 included in the L1 reference picture list are included. [1] is located after the encoding target picture.
- the Col0 block is included in the reference picture L0 [0] and is encoded by bi-prediction.
- the forward reference picture L0 [1] is referenced by the motion vector mvCol0L0
- the backward reference picture L1 [1] is referenced by the motion vector mvCol0L1.
- the motion vector mvCol0L1 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L0 [0] to the reference picture L1 [1].
- the motion vector mvCol0L1L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvCol0L1 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L0 [0] to the reference picture L1 [1].
- the motion vector mvCol0L1L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales the motion vector mvCol0L1 of the Col0 block, and derives two motion vectors mvCol0L1L0 and mvCol0L1L1 that can be used for bi-prediction as temporal candidate motion vectors.
- the motion vector mvCol0L1 whose reference direction matches the direction from the reference picture L0 [0] including the Col0 block to the encoding target picture is used.
- a temporal candidate motion vector is derived using a motion vector mvCol0L1 that is assumed to be strongly related to the encoding target block among the two motion vectors mvCol0L0 and mvCol0L1.
- the motion vector mvCol0L0 may be used instead of the motion vector mvCol0L1.
- the candidate list generation unit 134 may evaluate each of the two motion vectors mvCol0L0 and mvCol0L1 according to a predetermined evaluation criterion, and select one of the two motion vectors mvCol0L0 and mvCol0L1. Then, the candidate list generation unit 134 may derive a temporal candidate motion vector from the selected one motion vector.
- one motion vector is selected from the two motion vectors mvCol0L0 and mvCol0L1 of the Col0 block according to the size of each motion vector or the temporal distance to the reference picture referenced by each motion vector. May be. For example, a motion vector with a small size may be selected, or a motion vector with a short temporal distance may be selected.
- the candidate list generation unit 134 calculates a prediction residual or RD cost based on each motion vector, and the motion having a small prediction residual or RD cost calculated from the two motion vectors mvCol0L0 and mvCol0L1.
- a vector may be selected.
- the RD cost is a weighted sum of coding distortion and generated code amount.
- the entropy encoding unit 110 may encode the identification information of the selected motion vector. Further, in the decoding device 200, the entropy decoding unit 202 may decode the identification information of the motion vector, and the candidate list generation unit 234 may select the motion vector according to the decoded identification information.
- the scaling of one of the two motion vectors of the Col0 block is used to refer to the opposite direction.
- a temporal candidate motion vector may be derived.
- the candidate list generation unit 134 selects one motion vector from the two motion vectors according to the selection method described above, and applies negative ratio scaling to the selected one motion vector. May be. Thereby, a time candidate motion vector having a reference direction opposite to the selected one motion vector is derived.
- the motion vector mvCol0L0 may be used.
- the candidate list generation unit 134 may derive two temporal candidate motion vectors that can be used for bi-prediction from each of the two motion vectors mvCol0L0 and mvCol0L1. Accordingly, the candidate list generation unit 134 may derive four temporal candidate motion vectors from the two motion vectors mvCol0L0 and mvCol0L1.
- FIG. 18B is a conceptual diagram showing candidate motion vectors derived from the bi-predicted Col1 block.
- Each picture, encoding target block, and the like in this example are the same as in the example of FIG. 18A.
- the Col1 block is included in the reference picture L1 [0] and is encoded by bi-prediction.
- the forward reference picture L0 [1] is referenced by the motion vector mvCol1L0
- the backward reference picture L1 [1] is referenced by the motion vector mvCol1L1.
- the motion vector mvCol1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- the motion vector mvCol1L0L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvCol1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- the motion vector mvCol1L0L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales the motion vector mvCol1L0 of the Col1 block, and derives two motion vectors mvCol1L0L0 and mvCol1L0L1 that can be used for bi-prediction as temporal candidate motion vectors.
- the motion vector mvCol1L0 whose reference direction matches the direction from the reference picture L1 [0] including the Col1 block to the encoding target picture is used.
- a temporal candidate motion vector is derived using the motion vector mvCol1L0 that is assumed to be strongly related to the encoding target block among the two motion vectors mvCol1L0 and mvCol1L1.
- the motion vector mvCol1L1 may be used instead of the motion vector mvCol1L0.
- the candidate list generation unit 134 may evaluate each of the two motion vectors mvCol1L0 and mvCol1L1 according to a predetermined evaluation criterion, and select one of the two motion vectors mvCol1L0 and mvCol1L1. Then, the candidate list generation unit 134 may derive a temporal candidate motion vector from the selected one motion vector.
- the candidate list generation unit 134 can select one motion vector from the two motion vectors mvCol1L0 and mvCol1L1 of the Col1 block, as in the case of selecting one motion vector for the Col0 block. it can.
- the Col1 block is encoded with bi-prediction in only one of the forward and backward directions, refer to the opposite direction by scaling of one of the two motion vectors.
- a temporal candidate motion vector for performing may be derived.
- the motion vector mvCol1L1 may be used.
- the candidate list generation unit 134 may derive two temporal candidate motion vectors that can be used for bi-prediction from each of the two motion vectors mvCol1L0 and mvCol1L1. Accordingly, the candidate list generation unit 134 may derive four temporal candidate motion vectors from the two motion vectors mvCol1L0 and mvCol1L1.
- FIG. 19A is a conceptual diagram showing candidate motion vectors derived from a single prediction Col0 block.
- the reference pictures L0 [0] and L0 [1] are located before the encoding target picture, and the reference pictures L1 [0] and L1 [1] are the encoding target.
- the Col0 block is included in the reference picture L0 [0] and is encoded by single prediction.
- the forward reference picture L0 [1] is referred to by the motion vector mvCol0L0.
- the motion vector mvCol0L0 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L0 [0] to the reference picture L0 [1].
- a motion vector mvCol0L0L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvCol0L0 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L0 [0] to the reference picture L0 [1].
- the motion vector mvCol0L0L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales the motion vector mvCol0L0 of the Col0 block and derives two motion vectors mvCol0L0L0 and mvCol0L0L1 that can be used for bi-prediction as temporal candidate motion vectors.
- FIG. 19B is a conceptual diagram showing candidate motion vectors derived from the single prediction Col1 block.
- the Col1 block is included in the reference picture L1 [0] and is encoded by single prediction.
- the forward reference picture L0 [1] is referred to by the motion vector mvCol1L0.
- the motion vector mvCol1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- the motion vector mvCol1L0L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvCol1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- the motion vector mvCol1L0L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales the motion vector mvCol1L0 of the Col1 block, and derives two motion vectors mvCol1L0L0 and mvCol1L0L1 that can be used for bi-prediction as temporal candidate motion vectors.
- FIG. 20A is a conceptual diagram illustrating candidate motion vectors derived from the bi-predictive Col0 block with respect to a bi-predictive encoding target block in only one direction.
- the reference pictures L0 [0] and L0 [1] included in the L0 reference picture list and the reference picture L1 [0] included in the L1 reference picture list are positioned before the encoding target picture. .
- the Col0 block is included in the reference picture L0 [0] and is encoded by bi-prediction.
- the forward reference picture L0 [1] is referenced by the motion vector mvCol0L0
- the backward picture NL is referenced by the motion vector mvCol0L1.
- the motion vector mvCol0L0 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L0 [0] to the reference picture L0 [1].
- a motion vector mvCol0L0L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvCol0L1 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] with respect to the time difference from the reference picture L0 [0] to the picture NL.
- the motion vector mvCol0L1L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales each of the motion vectors mvCol0L0 and mvCol0L1 of the Col0 block. As a result, the candidate list generation unit 134 derives two motion vectors mvCol0L0L0 and mvCol0L1L1 that can be used for bi-prediction as temporal candidate motion vectors.
- a motion vector mvCol0L0L0 referring to the reference picture L0 [0] included in the L0 reference picture list is derived as a temporal candidate motion vector.
- a motion vector mvCol0L1L1 referring to the reference picture L1 [0] included in the L1 reference picture list is derived as a temporal candidate motion vector.
- the reference picture L0 [1] referred to by the motion vector mvCol0L0 of the Col0 block is a reference picture included in the L0 reference picture list for the Col0 block.
- the reference picture NL referred to by the motion vector mvCol0L1 of the Col0 block is a reference picture included in the L1 reference picture list for the Col0 block.
- the motion vector mvCol0L0L0 that refers to the L0 reference picture list for the current block is derived as a temporal candidate motion vector from the motion vector mvCol0L0 that refers to the L0 reference picture list for the Col0 block. Then, from the motion vector mvCol0L1 that refers to the L1 reference picture list for the Col0 block, a motion vector mvCol0L1L1 that refers to the L1 reference picture list for the current block is derived as a temporal candidate motion vector.
- the motion vector mvCol0L1 may be used instead of the motion vector mvCol0L0.
- the motion vector mvCol0L0 may be used instead of the motion vector mvCol0L1.
- the candidate list generation unit 134 may evaluate two motion vectors mvCol0L0 and mvCol0L1 for each of the two reference picture lists and select one of the two motion vectors mvCol0L0 and mvCol0L1. Then, the candidate list generation unit 134 may derive a temporal candidate motion vector from one selected motion vector for each of the two reference picture lists.
- the motion vector mvCol0L1 may be used in addition to the motion vector mvCol0L0.
- the motion vector mvCol0L0 may be used in addition to the motion vector mvCol0L1.
- the candidate list generation unit 134 may derive two temporal candidate motion vectors referring to the reference picture L0 [0] included in the L0 reference picture list from the two motion vectors mvCol0L0 and mvCol0L1.
- the candidate list generation unit 134 may derive two temporal candidate motion vectors referring to the reference picture L1 [0] included in the L1 reference picture list from the two motion vectors mvCol0L0 and mvCol0L1.
- the candidate list generation unit 134 may derive four temporal candidate motion vectors from the two motion vectors mvCol0L0 and mvCol0L1.
- the candidate list generation unit 134 includes a temporal candidate motion vector that refers to the L0 reference picture list and a temporal candidate motion vector that refers to the L1 reference picture list. Deriving only one.
- the candidate list generation unit 134 may derive at least one temporal candidate motion vector that refers to the reference picture L0 [0] from at least one of the two motion vectors mvCol0L0 and mvCol0L1. .
- the candidate list generation unit 134 may derive at least one temporal candidate motion vector that refers to the reference picture L1 [0] from at least one of the two motion vectors mvCol0L0 and mvCol0L1.
- FIG. 20B is a conceptual diagram illustrating candidate motion vectors derived from the bi-predictive Col1 block with respect to a bi-predictive encoding target block in only one direction.
- the Col1 block is included in the reference picture L1 [0] and is encoded by bi-prediction.
- the forward reference picture L0 [0] is referenced by the motion vector mvCol1L0
- the backward picture NL is referenced by the motion vector mvCol1L1.
- the motion vector mvCol1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- the motion vector mvCol1L0L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvCol1L1 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L1 [0] to the picture NL.
- a motion vector mvCol1L1L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales each of the motion vectors mvCol1L0 and mvCol1L1 of the Col1 block. As a result, the candidate list generation unit 134 derives two motion vectors mvCol1L0L0 and mvCol1L1L1 that can be used for bi-prediction as temporal candidate motion vectors.
- a motion vector mvCol1L0L0 referring to the reference picture L0 [0] included in the L0 reference picture list is derived as a temporal candidate motion vector.
- a motion vector mvCol1L1L1 referring to the reference picture L1 [0] included in the L1 reference picture list is derived as a temporal candidate motion vector from the other motion vector mvCol1L1 of the Col1 block.
- the reference picture L0 [1] referred to by the motion vector mvCol1L0 of the Col1 block is a reference picture included in the L0 reference picture list for the Col1 block.
- the reference picture NL referred to by the motion vector mvCol1L1 of the Col1 block is a reference picture included in the L1 reference picture list for the Col1 block.
- the motion vector mvCol1L0L0 that refers to the L0 reference picture list for the current block is derived as a temporal candidate motion vector.
- a motion vector mvCol1L1L1 that refers to the L1 reference picture list for the current block is derived as a temporal candidate motion vector.
- two temporal candidate motion vectors that refer to the two reference picture lists for the current block are derived from the two motion vectors mvCol1L0 and mvCol1L1 that refer to the two reference picture lists for the Col1 block.
- the motion vector mvCol1L1 may be used instead of the motion vector mvCol1L0.
- the motion vector mvCol1L0 may be used instead of the motion vector mvCol1L1.
- the candidate list generation unit 134 may evaluate the two motion vectors mvCol1L0 and mvCol1L1 for each of the two reference picture lists and select one of the two motion vectors mvCol1L0 and mvCol1L1. Then, the candidate list generation unit 134 may derive a temporal candidate motion vector from one selected motion vector for each of the two reference picture lists.
- the motion vector mvCol1L1 may be used in addition to the motion vector mvCol1L0.
- the motion vector mvCol1L0 may be used in addition to the motion vector mvCol1L1.
- the candidate list generation unit 134 may derive two temporal candidate motion vectors referring to the reference picture L0 [0] included in the L0 reference picture list from the two motion vectors mvCol1L0 and mvCol1L1.
- the candidate list generation unit 134 may derive two temporal candidate motion vectors referring to the reference picture L1 [0] included in the L1 reference picture list from the two motion vectors mvCol1L0 and mvCol1L1.
- the candidate list generation unit 134 may derive four temporal candidate motion vectors from the two motion vectors mvCol1L0 and mvCol1L1.
- the candidate list generation unit 134 includes a temporal candidate motion vector that refers to the L0 reference picture list and a temporal candidate motion vector that refers to the L1 reference picture list. Deriving only one.
- the candidate list generation unit 134 may derive at least one temporal candidate motion vector that refers to the reference picture L0 [0] from at least one of the two motion vectors mvCol1L0 and mvCol1L1. .
- the candidate list generation unit 134 may derive at least one temporal candidate motion vector that refers to the reference picture L1 [0] from at least one of the two motion vectors mvCol1L0 and mvCol1L1.
- the decoding device 200 also operates in the same manner as the encoding device 100. That is, each component of the decoding device 200 operates in the same manner as the corresponding component in the encoding device 100.
- the encoding in the above description can be appropriately read as decoding.
- a predicted motion vector index for specifying a predicted motion vector selected from a plurality of candidate motion vectors is encoded, an index is given to each of the plurality of candidate motion vectors.
- encoding apparatus 100 and decoding apparatus 200 give an index to each of a plurality of candidate motion vectors according to a predetermined common index assignment rule. Then, the index given to the candidate motion vector selected as the predicted motion vector is encoded and decoded.
- the index given to each of the plurality of candidate motion vectors may be expressed by a number.
- each of the Col0 block and the Col1 block is encoded by bi-prediction or single prediction.
- a temporal candidate motion vector can be derived by a combination of the above examples.
- a temporal candidate motion vector is derived by combining the example of FIG. 18A and the example of FIG. 19B. Can be done.
- a reference picture having a reference picture index of 0 is used as a reference picture including a Col0 block or a reference picture including a Col1 block.
- a reference picture whose reference picture index is not 0 may be used as a reference picture including a Col0 block or a reference picture including a Col1 block.
- candidate motion vectors are derived from each of the Col0 block and the Col1 block.
- one of the Col0 block and the Col1 block may be included in the same moving object range as the encoding target block. Therefore, by deriving candidate motion vectors from each of the Col0 block and the Col1 block, an appropriate candidate motion vector having the same characteristics as the motion vector of the encoding target block can be derived.
- candidate motion vectors may not be derived from each of the Col0 block and the Col1 block for all the encoding target blocks. For example, for one coding target block, candidate motion vectors may be derived from each of the Col0 block and the Col1 block. And about another encoding object block, a candidate motion vector may not be derived
- temporal candidate motion vectors may be derived from co-located blocks included in one reference picture list.
- temporal candidate motion vectors are derived from the co-located block included in the L0 reference picture list and the co-located block included in the L1 reference picture list.
- an ATMVP block may be used.
- the temporal candidate motion vector may be derived from each of the ATMVP block in the reference picture included in the L0 reference picture list and the ATMVP block in the reference picture included in the L1 reference picture list.
- an ATMVP block in a reference picture included in the L0 reference picture list may be referred to as an Adv0 block.
- An ATMVP block in a reference picture included in the L1 reference picture list may be referred to as an Adv1 block.
- the Adv0 block and the Adv1 block may be used instead of the Col0 block and the Col1 block in the plurality of examples of FIGS. 18A to 20B.
- FIGS. 21A and 21B an example in which a temporal candidate motion vector is derived from each of the Adv0 block and the Adv1 block will be described with reference to FIGS. 21A and 21B.
- the Adv0 block and the Adv1 block are used instead of the Col0 block and the Col1 block in the examples of FIGS. 18A and 18B.
- FIG. 21A is a conceptual diagram showing candidate motion vectors derived from the Adv0 block.
- the Adv0 block is included in the reference picture L0 [0] in the L0 reference picture list.
- Such an Adv0 block is determined according to the provisional motion vector of the encoding target block.
- the candidate list generation unit 134 tentatively specifies a motion vector that refers to the reference picture L0 [0] of the L0 reference picture list according to the motion vector of the encoded block adjacent to the encoding target block. Determined as a simple motion vector. At that time, the candidate list generation unit 134 selects a block for determining a provisional motion vector of the encoding target block from among a plurality of encoded blocks adjacent to the encoding target block with respect to the encoding target block. You may determine according to a relative position.
- the relative position of the adjacent block D with respect to the encoding target block in FIG. 11 may be determined in advance as the position of the adjacent block for determining the provisional motion vector of the encoding target block.
- the candidate list generation unit 134 searches for the inter prediction adjacent blocks in the order of the adjacent blocks D, A, B, and C in FIG. 11, and selects the inter prediction adjacent block first found as a temporary motion vector. You may use for the adjacent block for determining.
- scaling may be applied to the motion vector of the adjacent block, and the motion vector to which the scaling is applied may be used as a temporary motion vector of the encoding target block.
- the ratio of the time difference from the encoding target picture to the reference picture L0 [0] included in the L0 reference picture list with respect to the time difference from the encoding target picture to the reference picture referenced by the motion vector of the adjacent block. May be used.
- negative ratio scaling may be applied to the motion vector of the adjacent block, and the motion vector of the adjacent block may be inverted. Then, the inverted motion vector may be used as a temporary motion vector of the encoding target block. Thereby, even when the adjacent block is encoded with reference to only one of the forward direction and the backward direction, the motion vector that refers to the appropriate reference direction is used as the provisional motion vector of the encoding target block. Used.
- the candidate list generation unit 134 determines, as an Adv0 block, a block indicated in the reference picture L0 [0] included in the L0 reference picture list from the encoding target block by the provisional motion vector of the encoding target block.
- the candidate list generation unit 134 determines the motion vector mvCurL0 as a provisional motion vector of the encoding target block. Then, the candidate list generating unit 134 determines a block indicated by the motion vector mvCurL0 from the coding target block in the reference picture L0 [0] included in the L0 reference picture list as an Adv0 block.
- the motion vector mvCurL0 is, for example, the motion vector of the adjacent block D shown in FIG. 11, and is a motion vector that refers to the reference picture L0 [0] included in the L0 reference picture list. Further, scaling may be applied to the motion vector of the adjacent block D, and the motion vector to which the scaling is applied may be used as the motion vector mvCurL0. For example, scaling may be applied to the motion vector of the adjacent block D so that the motion vector mvCurL0 referring to the reference picture L0 [0] is obtained.
- the Adv0 block is encoded by bi-prediction.
- the forward reference picture L0 [1] is referenced by the motion vector mvAdv0L0
- the backward reference picture L1 [1] is referenced by the motion vector mvAdv0L1.
- the motion vector mvAdv0L1 is scaled at the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L0 [0] to the reference picture L1 [1].
- the motion vector mvAdv0L1L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvAdv0L1 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L0 [0] to the reference picture L1 [1].
- the motion vector mvAdv0L1L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales the motion vector mvAdv0L1 of the Adv0 block, and derives each of two motion vectors mvAdv0L1L0 and mvAdv0L1L1 that can be used for bi-prediction as temporal candidate motion vectors.
- the Col0 block in the example of FIG. 18A and the motion vectors mvCol0L0 and mvCol0L1 etc. can be replaced with the Adv0 block in the example of FIG. 21A and the motion vectors mvAdv0L0 and mvAdv0L1. Therefore, a specific description is omitted.
- FIG. 21B is a conceptual diagram showing candidate motion vectors derived from the Adv1 block.
- the Adv1 block is included in the reference picture L1 [0] in the L1 reference picture list.
- Such an Adv1 block is determined according to the provisional motion vector of the encoding target block.
- the candidate list generation unit 134 tentatively specifies a motion vector that refers to the reference picture L1 [0] of the L1 reference picture list according to the motion vector of the encoded block adjacent to the encoding target block. Determined as a simple motion vector. At that time, the candidate list generation unit 134 selects a block for determining a provisional motion vector of the encoding target block from among a plurality of encoded blocks adjacent to the encoding target block with respect to the encoding target block. You may determine according to a relative position.
- the relative position of the adjacent block D with respect to the encoding target block in FIG. 11 may be determined in advance as the position of the adjacent block for determining the provisional motion vector of the encoding target block.
- the candidate list generation unit 134 searches for the inter prediction adjacent blocks in the order of the adjacent blocks D, A, B, and C in FIG. 11, and selects the inter prediction adjacent block first found as a temporary motion vector. You may use for the adjacent block for determining.
- scaling may be applied to the motion vector of the adjacent block, and the motion vector to which the scaling is applied may be used as a temporary motion vector of the encoding target block.
- the ratio of the time difference from the encoding target picture to the reference picture L1 [0] included in the L1 reference picture list with respect to the time difference from the encoding target picture to the reference picture referred to by the motion vector of the adjacent block. May be used.
- negative ratio scaling may be applied to the motion vector of the adjacent block, and the motion vector of the adjacent block may be inverted. Then, the inverted motion vector may be used as a temporary motion vector of the encoding target block. Thereby, even when the adjacent block is encoded with reference to only one of the forward direction and the backward direction, the motion vector that refers to the appropriate reference direction is used as the provisional motion vector of the encoding target block. Used.
- the candidate list generating unit 134 determines the block indicated by the reference picture L1 [0] included in the L1 reference picture list from the encoding target block as the Adv1 block by the provisional motion vector of the encoding target block.
- the candidate list generation unit 134 determines the motion vector mvCurL1 as a provisional motion vector of the encoding target block. Then, the candidate list generation unit 134 determines, as an Adv1 block, a block indicated by the motion vector mvCurL1 in the reference picture L1 [0] included in the L1 reference picture list from the coding target block.
- the motion vector mvCurL1 is, for example, the motion vector of the adjacent block D shown in FIG. 11, and is a motion vector that refers to the reference picture L1 [0] included in the L1 reference picture list. Further, scaling may be applied to the motion vector of the adjacent block D, and the motion vector to which the scaling is applied may be used as the motion vector mvCurL1. For example, the scaling may be applied to the motion vector of the adjacent block D so that the motion vector mvCurL1 referring to the reference picture L1 [0] is obtained.
- two motion vectors mvCurL0 and mvCurL1 may be derived from the same one motion vector of the adjacent block D.
- the motion vector mvCurL0 may be derived from one of the two motion vectors of the adjacent block D encoded by bi-prediction, and the motion vector mvCurL1 may be derived from the other.
- the motion vector mvCurL0 may be derived from the motion vector of the adjacent block D
- the motion vector mvCurL1 may be derived from the motion vector of another adjacent block A, B, or C.
- the Adv1 block is encoded by bi-prediction.
- the forward reference picture L0 [1] is referenced by the motion vector mvAdv1L0
- the backward reference picture L1 [1] is referenced by the motion vector mvAdv1L1.
- the motion vector mvAdv1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- a motion vector mvAdv1L0L0 referring to the reference picture L0 [0] is derived as a temporal candidate motion vector.
- the motion vector mvAdv1L0 is scaled by the ratio of the time difference from the current picture to the reference picture L1 [0] to the time difference from the reference picture L1 [0] to the reference picture L0 [1].
- a motion vector mvAdv1L0L1 referring to the reference picture L1 [0] is derived as a temporal candidate motion vector.
- the candidate list generation unit 134 scales the motion vector mvAdv1L0 of the Adv1 block, and derives each of two motion vectors mvAdv1L0L0 and mvAdv1L0L1 that can be used for bi-prediction as temporal candidate motion vectors.
- the Col1 block in the example of FIG. 18B and the motion vectors mvCol1L0 and mvCol1L1 etc. can be replaced with the Adv1 block in the example of FIG. 21B and the motion vectors mvAdv1L0 and mvAdv1L1 etc. Therefore, a specific description is omitted.
- the Adv0 block and the Adv1 block are used instead of the Col0 block and the Col1 block in the examples of FIGS. 18A and 18B.
- the Adv0 block and the Adv1 block may be used instead of the Col0 block and the Col1 block in the examples of FIGS. 19A to 20B.
- the Col0 block and the Col1 block in the examples of FIGS. 19A to 20B may be replaced with the Adv0 block and the Adv1 block. Further, in addition to the Col0 block and the Col1 block in the examples of FIGS. 18A to 20B, an Adv0 block and an Adv1 block may be used.
- candidate motion vectors are derived from the Adv0 block in the reference picture included in the L0 reference picture list and the Adv1 block in the reference picture included in the L1 reference picture list.
- a candidate motion vector is derived from each of the Adv0 block and the Adv1 block, so that an appropriate candidate can be obtained from the region corresponding to the encoding target block.
- a motion vector can be derived.
- candidate motion vectors may not be derived from the Adv0 block and the Adv1 block for all the encoding target blocks.
- a candidate motion vector may be derived from each of the Adv0 block and the Adv1 block for one encoding target block.
- a candidate motion vector may not be derived from an Adv1 block, but a candidate motion vector may be derived from an Adv0 block.
- temporal candidate motion vectors may be derived from ATMVP blocks included in one reference picture list.
- FIG. 22 is a conceptual diagram illustrating a plurality of groups related to a plurality of candidate motion vectors.
- the predicted motion vector for encoding the information of the encoding target block can be specified by an index associated with each of the plurality of candidate motion vectors. For example, an index is associated with each of up to N candidate motion vectors.
- the multiple candidate motion vectors constitute a candidate list.
- the plurality of candidate motion vectors may include a spatial candidate motion vector, may include a temporal candidate motion vector, or may include other candidate motion vectors. That is, the maximum of N candidate motion vectors may include a group of spatial candidate motion vectors, a group of temporal candidate motion vectors, and a group of other candidate motion vectors.
- the spatial candidate motion vector is, for example, a candidate motion vector derived from a block spatially adjacent to the encoding target block.
- the spatial candidate motion vector may be derived from a block located in the vicinity of the encoding target block and not adjacent to the encoding target block.
- the temporal candidate motion vector is a candidate motion vector derived from a block included in a reference picture different from the encoding target picture.
- the temporal candidate motion vector may be derived from a Col0 block, a Col1 block, an Adv0 block, an Adv1 block, or the like.
- a temporal candidate motion vector may be derived from each of the Col0 block and the Col1 block for one encoding target block. Then, a temporal candidate motion vector may be derived from one of the Col0 block and the Col1 block with respect to another encoding target block.
- a temporal candidate motion vector may be derived from each of the Adv0 block and the Adv1 block for one encoding target block. Then, temporal candidate motion vectors may be derived from one of the Adv0 block and the Adv1 block with respect to the other encoding target blocks.
- candidate motion vectors are candidate motion vectors that are different from the spatial candidate motion vector and the temporal candidate motion vector.
- Other candidate motion vectors may be derived from a plurality of candidate motion vectors, each of which is a spatial candidate motion vector or a temporal candidate motion vector. For example, an average value or median value of a plurality of candidate motion vectors may be derived as another candidate motion vector.
- a predetermined motion vector may be used as another candidate motion vector.
- a motion vector having a size of zero may be used as another candidate motion vector.
- fixed candidate motion vectors may be defined in sequence units, picture units, slice units, or a predetermined unit including one or more blocks.
- the entropy encoding unit 110 may encode a fixed candidate motion vector in sequence units into a sequence parameter set.
- the entropy encoding unit 110 may encode a fixed candidate motion vector for each picture into a picture parameter set.
- the entropy encoding unit 110 may encode a fixed candidate motion vector in units of slices into a slice header.
- the entropy decoding unit 202 may decode a fixed candidate motion vector in sequence units from the sequence parameter set.
- the entropy decoding unit 202 may decode a fixed candidate motion vector in units of pictures from a picture parameter set.
- the entropy decoding unit 202 may decode a fixed candidate motion vector in units of slices from the slice header.
- a motion vector indicating the motion of the entire image may be included as a fixed candidate motion vector in header information such as a sequence parameter set, a picture parameter set, or a slice header.
- header information such as a sequence parameter set, a picture parameter set, or a slice header.
- a candidate motion vector indicating the motion of the entire image and a candidate motion vector indicating the motion of the object May be included in the header information.
- the encoding apparatus 100 may encode a difference with respect to the candidate motion vector before the update.
- the candidate motion vector derivation method, the index assignment method, and the maximum number of candidate motion vectors may be determined in sequence units, picture units, slice units, or predetermined units including one or more blocks. Good.
- a candidate motion vector derivation method may be determined in sequence units by a sequence parameter set, may be determined in picture units by a picture parameter set, or may be determined in slice units by a slice header. .
- the candidate list generation unit 134 may derive a temporal candidate motion vector from each of the Col0 block and the Col1 block.
- the candidate list generation unit 134 may derive a temporal candidate motion vector from each of the Adv0 block and the Adv1 block.
- the candidate list generation unit 134 may derive a temporal candidate motion vector from one of the Col0 block and the Col1 block. Alternatively, in this case, the candidate list generation unit 134 may derive a temporal candidate motion vector from one of the Adv0 block and the Adv1 block.
- the candidate list generation unit 134 may determine whether or not the encoding target block is near the boundary of the moving object range based on an object extraction technique including edge detection or machine learning. Alternatively, the candidate list generation unit 134 may determine whether the encoding target block is near the boundary of the moving object range based on the movement for each pixel or the movement for each rectangular area having a predetermined size. .
- the candidate list generation unit 134 may determine whether or not the difference between the motion vector of the Col0 block and the motion vector of the Col1 block is equal to or greater than a threshold value. And if a difference is more than a threshold value, candidate list generating part 134 may derive a time candidate motion vector from each of Col0 block and Col1 block. On the other hand, if the difference is less than the threshold, the candidate list generation unit 134 may derive a temporal candidate motion vector from one of the Col0 block and the Col1 block.
- the candidate list generation unit 134 may derive the time candidate motion vector from each of the Adv0 block and the Adv1 block. Good. On the other hand, if the difference is less than the threshold, the candidate list generation unit 134 may derive a temporal candidate motion vector from one of the Adv0 block and the Adv1 block.
- the method for deriving the spatial candidate motion vector and the like may be changed according to whether or not the encoding target block is near the boundary of the moving object range, similarly to the temporal candidate motion vector.
- the candidate list generation unit 134 may derive a spatial candidate motion vector from each of a plurality of adjacent blocks. If the encoding target block is not near the boundary of the moving object range, the candidate list generation unit 134 may derive a spatial candidate motion vector from one of a plurality of adjacent blocks.
- the candidate list generation unit 134 may determine whether or not the difference between two motion vectors of two adjacent blocks is equal to or greater than a threshold value. And if a difference is more than a threshold value, candidate list generating part 134 may derive a spatial candidate motion vector from each of two adjacent blocks. On the other hand, if the difference is less than the threshold, the candidate list generation unit 134 may derive a spatial candidate motion vector from one of the two adjacent blocks.
- the group may be reflected in the index allocation method.
- the candidate list generation unit 134 may group a plurality of candidate motion vectors into a plurality of groups according to the number of temporal candidate motion vectors, the number of spatial candidate motion vectors, and the like.
- the candidate list generation unit 134 determines the number of temporal candidate motion vectors based on whether or not the temporal candidate motion vector is derived from each of the blocks included in the L0 reference picture list and the blocks included in the L1 reference picture list. May be specified.
- the candidate list generation unit 134 may specify the number of spatial candidate motion vectors based on whether or not the spatial candidate motion vectors are derived from blocks that are not adjacent to the encoding target block.
- the candidate list generation unit 134 may use a combination of the identification number of the group including the candidate motion vector and the index number of the candidate motion vector in the group as the candidate motion vector index. Good.
- a more appropriate predicted motion vector can be selected by deriving a candidate motion vector from each block in a spatially and temporally wide range.
- the temporal candidate motion vector is derived from each of the block included in the L0 reference picture list and the block included in the L1 reference picture list, so that the temporal candidate motion vector is derived from each block in a wide temporal range. Is derived. Thereby, a more appropriate predicted motion vector can be selected.
- a temporal candidate motion vector is derived from a block included in a reference picture whose reference picture index is 0 in addition to a block included in a reference picture whose reference picture index is 0. Also good. Thereby, a temporal candidate motion vector is derived from each block in a wider range in time, and a more appropriate predicted motion vector can be selected.
- a temporal candidate motion vector may be derived from a block around the co-located block or ATMVP block.
- the range around the block may be a range of a predetermined distance from the block, or may be a range of one or more blocks adjacent to the block.
- two motion vectors having a large difference may be extracted from a plurality of blocks around the co-located block or the ATMVP block. Then, the two extracted motion vectors may be regarded as the two motion vectors of the foreground and the background. Then, a temporal candidate motion vector may be derived from each of the two extracted motion vectors.
- the candidate list generation unit 134 may group a plurality of similar motion vectors of a plurality of blocks close to each other among a plurality of motion vectors of a plurality of blocks around the co-located block or the ATMVP block. Then, the candidate list generation unit 134 may derive a temporal candidate motion vector for each group based on an average value or median value of a plurality of motion vectors belonging to the group.
- each motion vector may be normalized according to a temporal distance. That is, each motion vector may be scaled to a motion vector that refers to the reference picture L0 [0] or L1 [0] from the current picture.
- a spatial candidate motion vector may be derived from each block in a spatially wider range than the range adjacent to the encoding target block so that a more appropriate predicted motion vector can be obtained.
- a re-adjacent block that is a block adjacent to the adjacent block may be used to derive a spatial candidate motion vector.
- FIG. 23 is a conceptual diagram showing a block for deriving a spatial candidate motion vector.
- spatial candidate motion vectors are derived from at least one of the re-adjacent blocks C1, C2, and C3 that are blocks adjacent to the adjacent block C. .
- the re-adjacent block used for derivation of the spatial candidate motion vector may be fixed or adaptively switched.
- the re-adjacent blocks C1, C2, and C3 are defined for the adjacent block C, but the re-adjacent blocks may be defined for the adjacent blocks A, B, and D in the same manner. Good. And among the adjacent blocks A, B, C, and D, the adjacent block in which the re-adjacent block used for the derivation of the spatial candidate motion vector may be fixed or adaptively switched.
- re-adjacent blocks used for derivation of spatial candidate motion vectors may be determined for adjacent blocks C and D so as to cover as wide a spatial range as possible.
- the adjacent blocks that are in contact with the corners of the encoding target block may be used for deriving the spatial candidate motion vector.
- Use of such an intermediate block is effective when the size of the encoding target block is large, for example, when the size of the encoding target block is 16 ⁇ 16 or more.
- the encoding apparatus 100 selects a predicted motion vector that is a motion vector predicted as a motion vector of an encoding target block from a plurality of candidate motion vectors including a spatial candidate motion vector and a temporal candidate motion vector.
- the encoding apparatus 100 calculates a prediction residual or RD cost based on each candidate motion vector, and selects a candidate motion vector having the smallest calculated prediction residual or RD cost among a plurality of candidate motion vectors. You may select as a prediction motion vector.
- the encoding apparatus 100 encodes the information of the encoding target block using the prediction motion vector.
- the encoding apparatus 100 may encode a difference motion vector between the motion vector of the encoding target block and the predicted motion vector. Thereby, the encoding apparatus 100 may encode the motion vector of the encoding target block using the predicted motion vector.
- the encoding apparatus 100 may encode a difference image between an image of the encoding target block and an image predicted according to the predicted motion vector. Thereby, the encoding apparatus 100 may encode the image of the encoding target block using the predicted motion vector.
- the encoding apparatus 100 encodes an index associated with a candidate motion vector selected as a predicted motion vector into a bitstream as identification information for identifying a predicted motion vector from among a plurality of candidate motion vectors. Also good.
- the decoding device 200 may decode the index from the bitstream. Then, the decoding apparatus 200 may select a candidate motion vector associated with the decoded index as a predicted motion vector from among a plurality of candidate motion vectors including a spatial candidate motion vector and a temporal candidate motion vector. . Then, the decoding device 200 decodes the information of the decoding target block using the predicted motion vector.
- the decoding device 200 may decode the difference motion vector and add the predicted motion vector and the difference motion vector. Thereby, the decoding apparatus 200 may decode the motion vector of the decoding target block using the predicted motion vector.
- the decoding device 200 may decode the difference image and add the image predicted according to the predicted motion vector and the difference image. Thereby, the decoding apparatus 200 may decode the image of a decoding object block using a prediction motion vector.
- the encoding apparatus 100 may not encode the prediction motion vector index.
- the decoding apparatus 200 does not need to decode the prediction motion vector index.
- a predicted motion vector may be selected by a template matching method or a bilateral matching method in FRUC.
- the encoding device 100 and the decoding device 200 may evaluate each of a plurality of candidate motion vectors when selecting a predicted motion vector from a plurality of candidate motion vectors.
- the encoding apparatus 100 and the decoding apparatus 200 may select a candidate motion vector that is most highly evaluated among a plurality of candidate motion vectors as a predicted motion vector.
- the encoding device 100 and the decoding device 200 determine two comparison target regions in the evaluation of each candidate motion vector. At that time, the encoding device 100 and the decoding device 200 determine at least one of the two comparison target regions according to the candidate motion vector to be evaluated. Then, the encoding device 100 and the decoding device 200 evaluate the candidate motion vector to be evaluated higher as the degree of matching between the reconstructed images of the two comparison target regions is higher.
- the encoding device 100 and the decoding device 200 can evaluate each of the plurality of candidate motion vectors in the same way, and can select the same predicted motion vector from among the plurality of candidate motion vectors.
- an index for identifying a predicted motion vector from among a plurality of candidate motion vectors increases, and the code amount of the index may increase.
- the index of the motion vector predictor since the index of the motion vector predictor is not encoded, an increase in the code amount accompanying an increase in the number of candidate motion vectors is suppressed.
- FRUC more space candidate motion vectors, temporal candidate motion vectors, and the like may be derived.
- the encoding apparatus 100 and the decoding apparatus 200 can improve prediction accuracy, suppressing the increase in code amount.
- the candidate list may be divided into an L0 reference candidate list including candidate motion vectors that refer to the L0 reference picture list and an L1 reference candidate list including candidate motion vectors that refer to the L1 reference picture list.
- the candidate list may include a candidate motion vector set of a candidate motion vector that refers to the L0 reference picture list and a candidate motion vector that refers to the L1 reference picture list. Further, the candidate list may include a candidate motion vector set of candidate motion vectors that refer to the L0 reference picture list, or may include a candidate motion vector set of candidate motion vectors that refer to the L1 reference picture list. .
- a predicted motion from among a plurality of candidate motion vectors included in the candidate list A vector may be selected.
- Candidate list generation unit 134 may derive temporal candidate motion vectors by mapping reference blocks instead of using co-located blocks and ATMVP blocks, or in addition to using co-located blocks and ATMVP blocks. .
- the candidate list generation unit 134 maps a plurality of reference blocks in a plurality of reference pictures to a coding target picture at the start of processing of the coding target picture. Specifically, the candidate list generation unit 134 maps each reference block to a corresponding area in the encoding target picture. Each corresponding region can also be expressed as a mapping region.
- the candidate list generation unit 134 derives a candidate motion vector for each block of the encoding target picture according to the mapping result. Specifically, the candidate list generation unit 134 derives a candidate motion vector from the motion vector of the reference block mapped to the corresponding region overlapping the block in the encoding target picture.
- Such candidate motion vector derivation processing may be performed in units of pictures, may be performed in units of slices obtained by dividing a picture, or may be performed in units of other regions. Good.
- FIG. 24 is a conceptual diagram illustrating mapping of reference blocks included in the L0 reference picture list and reference blocks included in the L1 reference picture list.
- the candidate list generation unit 134 derives a motion vector mvBlk01 that refers to the encoding target picture by normalizing the motion vector of the reference block Blk01 included in the reference picture L0 [0].
- the candidate list generation unit 134 derives a motion vector mvBlk01 that refers to the encoding target picture by scaling the motion vector of the reference block Blk01. For this scaling, the ratio of the time difference from the reference picture L0 [0] to the encoding target picture with respect to the time difference from the reference picture L0 [0] to the reference picture referenced by the motion vector of the reference block Blk01 is used.
- the candidate list generation unit 134 maps the reference block Blk01 to the corresponding area Blk01c in the encoding target picture according to the motion vector mvBlk01. That is, the candidate list generation unit 134 assigns the reference block Blk01 to the corresponding region Blk01c in the encoding target picture according to the motion vector mvBlk01. In other words, the candidate list generation unit 134 specifies the corresponding region Blk01c of the reference block Blk01 in the current picture according to the motion vector mvBlk01.
- the candidate list generation unit 134 derives a motion vector mvBlk02 that refers to the encoding target picture by normalizing the motion vector of the reference block Blk02 included in the reference picture L0 [0]. Then, the candidate list generation unit 134 maps the reference block Blk02 to the corresponding region Blk02c in the encoding target picture according to the motion vector mvBlk02.
- the candidate list generation unit 134 derives a motion vector mvBlk03 that refers to the encoding target picture by normalizing the motion vector of the reference block Blk03 included in the reference picture L0 [0]. Then, the candidate list generation unit 134 maps the reference block Blk03 to the corresponding region Blk03c in the encoding target picture according to the motion vector mvBlk03.
- the candidate list generating unit 134 derives a temporal candidate motion vector from the motion vector of the reference block mapped to each block of the encoding target picture.
- the candidate list generation unit 134 uses the reference picture L1 [0].
- the candidate list generation unit 134 derives a motion vector mvBlk11 that refers to the encoding target picture by normalizing the motion vector of the reference block Blk11 included in the reference picture L1 [0].
- the candidate list generation unit 134 derives a motion vector mvBlk11 that refers to the encoding target picture by scaling the motion vector of the reference block Blk11. For this scaling, the ratio of the time difference from the reference picture L1 [0] to the encoding target picture with respect to the time difference from the reference picture L1 [0] to the reference picture referenced by the motion vector of the reference block Blk11 is used.
- the candidate list generation unit 134 maps the reference block Blk11 to the corresponding region Blk11c in the encoding target picture according to the motion vector mvBlk11.
- the reference picture L0 [0] and the reference picture L1 [0] are used, there is a possibility that an empty area remains.
- FIG. 25 is a conceptual diagram showing a free area.
- the candidate list generation unit 134 derives a temporal candidate motion vector from the surrounding motion vectors for the block in the free area. That is, the candidate list generation unit 134 derives a temporal candidate motion vector from the motion vector of the reference block mapped to the area around the empty area block.
- the candidate list generation unit 134 derives a time candidate motion vector from the motion vector of the corresponding region Blk11c and the motion vector of the corresponding region Blk02c for the coding target block of the empty region. To do.
- the candidate list generation unit 134 may derive a temporal candidate motion vector by interpolation between the motion vector of the corresponding region Blk11c and the motion vector of the corresponding region Blk02c for the coding target block in the empty region.
- the candidate list generation unit 134 may derive a temporal candidate motion vector not by interpolation but by a motion vector having a smaller size among the motion vector of the corresponding region Blk11c and the motion vector of the corresponding region Blk02c. .
- the candidate list generation unit 134 may derive a temporal candidate motion vector from the motion vector selected from the motion vector of the corresponding region Blk11c and the motion vector of the corresponding region Blk02c by other selection methods. .
- FIG. 26 is a conceptual diagram showing an overlapping area.
- the reference block Blk02 is mapped to the corresponding area Blk02c by the motion vector mvBlk02
- the reference block Blk03 is mapped to the corresponding area Blk03c by the motion vector mvBlk03.
- the corresponding area Blk02c and the corresponding area Blk03c partially overlap. Details of the time candidate motion vectors regarding such overlapping regions will be described later with reference to FIG.
- FIG. 27 is a conceptual diagram showing an example of the encoding target block and the corresponding area.
- the corresponding area Blk01c of the reference block Blk01 overlaps the encoding target block.
- the candidate list generation unit 134 derives a temporal candidate motion vector for the prediction motion vector of the encoding target block from the motion vector of the one reference block. .
- the encoding target block includes a part of the corresponding area Blk01c of the reference block Blk01 and a free area, and does not include the corresponding areas of other reference blocks. Therefore, the candidate list generation unit 134 derives a temporal candidate motion vector from the motion vector of the reference block Blk01.
- the candidate list generation unit 134 derives a temporal candidate motion vector that refers to the reference picture L0 [0] from the encoding target block by scaling the motion vector of the reference block Blk01. For this scaling, the ratio of the time difference from the current picture to the reference picture L0 [0] to the time difference from the reference picture L0 [0] to the reference picture referenced by the motion vector of the reference block Blk01 is used.
- this temporal candidate motion vector can also be obtained by inverting the normalized motion vector mvBlk01 of the reference block Blk01.
- FIG. 28 is a conceptual diagram showing an example of a block to be encoded and two corresponding areas.
- the corresponding area Blk02c of the reference block Blk02 and the corresponding area Blk03c of the reference block Blk03 overlap with the encoding target block.
- the candidate list generating unit 134 calculates a temporal candidate motion from the motion vector of the reference block mapped to the corresponding region having the largest area in the encoding target block. Derive a vector.
- the candidate list generation unit 134 derives a temporal candidate motion vector from the motion vector of the reference block Blk03.
- the candidate list generation unit 134 derives a temporal candidate motion vector from the average value, median value, maximum value, or minimum value of a plurality of motion vectors of a plurality of blocks corresponding to a plurality of corresponding regions that overlap the encoding target block. May be. Further, the candidate list generation unit 134 weights a plurality of motion vectors corresponding to a plurality of corresponding regions according to the area occupied by each corresponding region overlapping the encoding target block, and uses the weighted average value of the plurality of motion vectors as a time candidate motion. A vector may be derived.
- the average value, median value, maximum value, minimum value, or weighted average value of multiple motion vectors when used, the average value, median value, maximum value of multiple motion vectors normalized according to temporal distance
- the minimum value or the weighted average value may be used. That is, an average value, median value, maximum value, minimum value, or weighted average of a plurality of motion vectors each scaled to a motion vector that refers to the reference picture L0 [0] or L1 [0] from the picture to be encoded A value may be used.
- the candidate list generation unit 134 may derive a temporal candidate motion vector from each of a plurality of motion vectors of a plurality of reference blocks mapped to a plurality of corresponding regions overlapping with the encoding target block.
- the upper limit of the number of time candidate motion vectors may be determined in advance.
- the index of the predicted motion vector since the index of the predicted motion vector is not encoded, an increase in the amount of code accompanying an increase in the number of candidate motion vectors is suppressed. Therefore, even if a temporal candidate motion vector is derived from each of a plurality of motion vectors of a plurality of reference blocks mapped to a plurality of corresponding regions that overlap the encoding target block, the amount of code accompanying the increase in the number of temporal candidate motion vectors The increase is suppressed. Therefore, the upper limit of the number of time candidate motion vectors may be determined in advance in order to suppress an increase in processing load.
- FIG. 29 is a conceptual diagram illustrating an example of an encoding target block, a plurality of adjacent blocks, and a plurality of corresponding areas.
- the candidate list generation unit 134 derives a temporal candidate motion vector from the motion vectors of the peripheral blocks of the encoding target block. . That is, in this case, the candidate list generation unit 134 derives a temporal candidate motion vector from the motion vector of the reference block mapped to the corresponding region around the encoding target block.
- the candidate list generation unit 134 derives a temporal candidate motion vector from the motion vector of the reference block Blk01 mapped to the corresponding region Blk01c that overlaps the first adjacent block adjacent to the right of the encoding target block.
- the candidate list generation unit 134 determines whether each of the plurality of adjacent blocks including the first adjacent block, the second adjacent block, the third adjacent block, and the like is an empty area in a predetermined order. Also good. Then, the candidate list generation unit 134 may derive a temporal candidate motion vector from the motion vector of the reference block mapped to the corresponding region that overlaps the adjacent block that is first determined not to be a free region.
- the candidate list generation unit 134 weights a plurality of motion vectors of a plurality of reference blocks mapped to a plurality of corresponding regions around the encoding target block according to a spatial distance from the encoding target block to each corresponding region. May be.
- generation part 134 may derive
- a weighted average value of a plurality of motion vectors when a weighted average value of a plurality of motion vectors is used, a weighted average value of a plurality of motion vectors normalized according to a temporal distance may be used. That is, a weighted average value of a plurality of motion vectors each scaled to a motion vector that refers to the reference picture L0 [0] or L1 [0] from the encoding target picture may be used.
- FIG. 30 is a conceptual diagram showing blocks defined as coding units and sub-blocks defined with a predetermined size.
- the predetermined size is determined as a size of M ⁇ N pixels, for example. Specifically, in a block defined with a size of 16 ⁇ 16 pixels as an encoding unit, 16 sub-blocks with a size of 4 ⁇ 4 pixels may be defined.
- the encoding target block may be a block defined as a coding unit or a sub-block defined with a predetermined size in a block defined as a coding unit.
- the reference block may be a block defined as a coding unit, or may be a sub-block defined with a predetermined size in a block defined as a coding unit.
- the candidate list generation unit 134 may derive a candidate motion vector for each block determined as a coding unit, or may derive a candidate motion vector for each sub-block determined by a predetermined size. . Then, the inter prediction unit 126 may perform prediction by selecting a prediction motion vector for each block determined as a coding unit, or select a prediction motion vector for each sub-block determined by a predetermined size. Prediction may be performed.
- the foreground and the background may be mixed in the block of the coding unit.
- the candidate list generation unit 134 can derive candidate motion vectors that match the motions of the sub-block belonging to the foreground and the sub-block belonging to the background by performing processing for each sub-block. it can.
- the inter prediction unit 126 performs prediction for each sub-block by selecting a prediction motion vector that matches each motion of the sub-block belonging to the foreground and the sub-block belonging to the background. it can.
- the candidate list generation unit 134 when the candidate list generation unit 134 derives a temporal candidate motion vector for a free area sub-block, the candidate list generation unit 134 generates a temporal candidate from motion vectors corresponding to other sub-blocks in the same block including the free area sub-block.
- a motion vector may be derived. That is, the candidate list generation unit 134 may use the range of the coding unit as the peripheral range of the sub-block without using the motion vector of the reference block mapped outside the range of the coding unit. Thereby, the candidate list generation unit 134 can appropriately limit the reference range.
- the operation of deriving a candidate motion vector for each sub-block and selecting a predicted motion vector can also be applied to a method using a co-located block or an ATMVP block in each of two reference picture lists.
- an operation of deriving a candidate motion vector for each sub-block and selecting a predicted motion vector may be performed as FRUC processing. That is, a predicted motion vector may be selected from among a plurality of candidate motion vectors for each sub-block according to a template matching method or bilateral matching method in FRUC.
- the number of motion vector predictors per coding unit increases.
- the number of predicted motion vector indexes also increases, and the amount of codes may increase.
- FRUC since the index of a motion vector predictor is not encoded, an increase in the amount of code accompanying an increase in the number of motion vector predictors is suppressed.
- the candidate list generating unit 134 derives candidate motion vectors by mapping reference blocks
- the candidate list generating unit 134 derives two or more candidate motion vectors from one reference block, as in the method using a co-located block or ATMVP block. May be.
- the candidate list generation unit 134 may derive two candidate motion vectors that can be used for bi-prediction from one motion vector of a reference block, or bi-prediction from two motion vectors of a reference block. Two available candidate motion vectors may be derived.
- the candidate list generation unit 134 derives four candidate motion vectors from the two motion vectors of the reference block by deriving two candidate motion vectors that can be used for bi-prediction from each of the two motion vectors of the reference block. It may be derived.
- the candidate list generation unit 134 may map the reference block to two corresponding regions in the encoding target picture according to the two motion vectors of the reference block.
- the candidate list generation unit 134 may map not only the reference picture whose reference picture index is 0, but also reference blocks of other reference pictures to corresponding areas in the encoding target picture according to the motion vector of the reference block.
- a plurality of reference blocks of reference pictures L0 [0] and L1 [0] may be used for mapping.
- a plurality of reference blocks of reference pictures L0 [1] and L1 [1] may be used for mapping in addition to a plurality of reference blocks of reference pictures L0 [0] and L1 [0].
- FIG. 31 is a block diagram illustrating an implementation example of the encoding device 100 according to Embodiment 1.
- the encoding device 100 includes a circuit 160 and a memory 162.
- a plurality of components of the encoding device 100 illustrated in FIGS. 1 and 16 are implemented by the circuit 160 and the memory 162 illustrated in FIG.
- the circuit 160 is a circuit that performs information processing and is a circuit that can access the memory 162.
- the circuit 160 is a dedicated or general-purpose electronic circuit that encodes a moving image.
- the circuit 160 may be a processor such as a CPU.
- the circuit 160 may be an aggregate of a plurality of electronic circuits. Further, for example, the circuit 160 may serve as a plurality of constituent elements excluding a constituent element for storing information among a plurality of constituent elements of the encoding device 100 illustrated in FIG. 1 and the like.
- the memory 162 is a general purpose or dedicated memory in which information for the circuit 160 to encode a moving image is stored.
- the memory 162 may be an electronic circuit or may be connected to the circuit 160. In addition, the memory 162 may be included in the circuit 160.
- the memory 162 may be an aggregate of a plurality of electronic circuits. Further, the memory 162 may be a magnetic disk or an optical disk, or may be expressed as a storage or a recording medium.
- the memory 162 may be a non-volatile memory or a volatile memory.
- a moving image to be encoded may be stored, or a bit string corresponding to the encoded moving image may be stored.
- the memory 162 may store a program for the circuit 160 to encode a moving image.
- the memory 162 may serve as a component for storing information among a plurality of components of the encoding device 100 illustrated in FIG. Specifically, the memory 162 may serve as the block memory 118, the frame memory 122, and the candidate block information memory 136 shown in FIG. More specifically, the memory 162 may store a reconstructed block, a reconstructed picture, a motion vector used for inter prediction, and the like.
- not all of the plurality of components shown in FIG. 1 or the like may be mounted, or all of the plurality of processes described above may not be performed. Some of the plurality of components shown in FIG. 1 and the like may be included in another device, and some of the plurality of processes described above may be executed by another device.
- a part of the plurality of components shown in FIG. 1 and the like are mounted, and a part of the plurality of processes described above is performed, so that a moving image can be generated with a small code amount. Can be handled appropriately.
- FIG. 32A is a flowchart illustrating a first operation example related to derivation of candidate motion vectors when a moving image is encoded. 31 may perform the operation shown in FIG. 32A when encoding a moving image.
- the circuit 160 of the encoding device 100 derives one or more candidate motion vectors for the predicted motion vector of the encoding target block from one or more motion vectors of the first reference block (S101).
- the first reference block is a block included in the first reference picture constituting the first reference picture list of the two reference picture lists for bi-prediction.
- the circuit 160 derives one or more candidate motion vectors for the predicted motion vector from one or more motion vectors of the second reference block (S102).
- the second reference block is a block included in the second reference picture constituting the second reference picture list of the two reference picture lists for bi-prediction.
- the circuit 160 selects a predicted motion vector from among a plurality of candidate motion vectors (S103).
- the plurality of candidate motion vectors are one or more candidate motion vectors derived from one or more motion vectors of the first reference block and one derived from one or more motion vectors of the second reference block.
- One or more candidate motion vectors are one or more candidate motion vectors.
- the circuit 160 encodes information on the encoding target block using the predicted motion vector (S104).
- the encoding apparatus 100 can derive the candidate motion vector from the first reference block in the first reference picture list and can derive the candidate motion vector from the second reference block in the second reference picture list. Therefore, the encoding apparatus 100 can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector.
- the encoding apparatus 100 can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- the circuit 160 may apply two scaling ratios to one motion vector of the two motion vectors of the first reference block. .
- the circuit 160 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the first reference block. May be.
- the circuit 160 may apply two scaling ratios to one motion vector of the two motion vectors of the second reference block. .
- the circuit 160 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the second reference block. May be.
- the encoding apparatus 100 includes candidates including two candidate motion vectors that refer to two reference picture lists from one motion vector of the first reference block and one motion vector of the second reference block.
- a motion vector set can be derived. That is, the encoding apparatus 100 can derive two candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from two motion vectors having different characteristics.
- the circuit 160 may select one of the two motion vectors of the first reference block. Two scaling ratios may be applied to the motion vector.
- the circuit 160 is configured to refer to the candidate motion vector for referring to the first reference picture list and the second reference picture list from one of the two motion vectors of the first reference block. Candidate motion vectors may be derived.
- the circuit 160 may select one of the two motion vectors of the second reference block. Two scaling ratios may be applied to. With this application, the circuit 160 is configured to refer to the candidate motion vector for referring to the first reference picture list and the second reference picture list from one of the two motion vectors of the second reference block. Candidate motion vectors may be derived.
- the encoding apparatus 100 has a candidate motion vector set configured by two candidate motion vectors that refer to two reference picture lists from only one motion vector of two motion vectors that are assumed to have similar characteristics. Can be derived. Therefore, the encoding apparatus 100 can improve processing efficiency.
- the circuit 160 may apply two scaling ratios to each of the two motion vectors of the first reference block.
- the circuit 160 uses the two candidate motion vectors for referring to the first reference picture list and the two candidate motions for referring to the second reference picture list from the two motion vectors of the first reference block.
- a vector may be derived.
- the circuit 160 may apply two scaling ratios to each of the two motion vectors of the second reference block.
- the circuit 160 uses the two candidate motion vectors for referring to the first reference picture list and the two candidate motions for referring to the second reference picture list from the two motion vectors of the second reference block.
- a vector may be derived.
- the encoding apparatus 100 can derive a candidate motion vector set including two candidate motion vectors referring to two reference picture lists from each of the four motion vectors of two reference blocks. That is, the encoding apparatus 100 can derive four candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from four motion vectors of two reference blocks.
- the circuit 160 refers to the first reference picture list from one of the two motion vectors of the first reference block.
- Candidate motion vectors may be derived.
- the circuit 160 may derive a candidate motion vector for referring to the second reference picture list from the other motion vector of the two motion vectors of the first reference block.
- the circuit 160 When the second reference block is encoded by bi-prediction, the circuit 160 is a candidate for referring to the first reference picture list from one of the two motion vectors of the second reference block.
- a motion vector may be derived.
- the circuit 160 may derive a candidate motion vector for referring to the second reference picture list from the other motion vector of the two motion vectors of the second reference block.
- the encoding apparatus 100 can derive four candidate motion vectors from the four motion vectors of the two reference blocks, respectively, and derive two candidate motion vector sets composed of the four candidate motion vectors. can do. That is, the encoding apparatus 100 can appropriately reflect the four motion vectors of the two reference blocks on the four candidate motion vectors included in the two candidate motion vector sets.
- the circuit 160 may apply two scaling ratios to one motion vector of the first reference block.
- the circuit 160 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the first reference block. May be.
- the circuit 160 may apply two scaling ratios to one motion vector of the second reference block.
- the circuit 160 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the second reference block. May be.
- the encoding apparatus 100 can derive a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from only one motion vector of each reference block. That is, the encoding apparatus 100 can derive a candidate motion vector set composed of two candidate motion vectors that can be used for bi-prediction from only one motion vector of each reference block.
- the encoding target block may be encoded by bi-prediction only in one direction among the forward direction and the backward direction in the display order.
- the circuit 160 may derive two or more candidate motion vectors for referring to one direction used for bi-prediction of the current block from one or more motion vectors of the first reference block.
- the circuit 160 derives two or more candidate motion vectors for referring to one direction used for bi-prediction of the current block from one or more motion vectors of the second reference block. Also good.
- the encoding apparatus 100 can derive two or more candidate motion vectors that refer to one direction from each reference block. Therefore, the encoding apparatus 100 can derive one or more candidate motion vector sets suitable for bi-prediction only in one direction from each reference block.
- the first reference picture list may be a reference picture list for referring to the forward direction in the display order.
- the second reference picture list may be a reference picture list for referring to the backward direction in the display order.
- the first reference block may be encoded by bi-prediction in both the forward and backward directions in the display order.
- the second reference block may be encoded by bi-prediction in both the forward and backward directions in the display order.
- the encoding target block may be encoded by bi-prediction in both the forward and backward directions in the display order.
- the circuit 160 may apply two scaling ratios to one motion vector for referring to the backward direction in the display order among the two motion vectors of the first reference block.
- the circuit 160 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the first reference block. May be.
- the circuit 160 may apply two scaling ratios to one motion vector for referring to the forward direction in the display order among the two motion vectors of the second reference block.
- the circuit 160 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the second reference block. May be.
- the encoding apparatus 100 is a candidate motion vector that refers to the two reference picture lists from the motion vector in the reference direction that temporally moves from the reference block to the encoding target block among the two motion vectors of each reference block.
- a set can be derived. That is, the encoding apparatus 100 appropriately derives a candidate motion vector set that can be used for bi-prediction from motion vectors that are temporally related to the encoding target block among the two motion vectors of each reference block. can do.
- the spatial position of the first reference block may be the same as the spatial position of the encoding target block
- the spatial position of the second reference block may be the space of the encoding target block. The same position may be used.
- FIG. 32B is a flowchart illustrating a second operation example related to derivation of candidate motion vectors when a moving image is encoded.
- the encoding apparatus 100 illustrated in FIG. 31 may perform the operation illustrated in FIG. 32B when encoding a moving image.
- the circuit 160 of the encoding device 100 identifies the first reference block included in the first reference picture using the first motion vector of the first adjacent block spatially adjacent to the encoding target block.
- the first reference picture is a picture constituting the first reference picture list of the two reference picture lists for bi-prediction.
- the circuit 160 derives one or more candidate motion vectors for the predicted motion vector of the encoding target block from one or more motion vectors of the first reference block (S202).
- the circuit 160 uses the first motion vector, the second motion vector of the first adjacent block, or the third motion vector of the second adjacent block spatially adjacent to the current block to be encoded to generate the second reference picture.
- the second reference block included in is identified (S203).
- the second reference picture is a picture constituting the second reference picture list of the two reference picture lists.
- the circuit 160 derives one or more candidate motion vectors for the predicted motion vector from one or more motion vectors of the second reference block (S204).
- the circuit 160 selects a predicted motion vector from among a plurality of candidate motion vectors (S205).
- the plurality of candidate motion vectors are one or more candidate motion vectors derived from one or more motion vectors of the first reference block and one derived from one or more motion vectors of the second reference block.
- One or more candidate motion vectors are one or more candidate motion vectors.
- the circuit 160 encodes information on the encoding target block using the predicted motion vector (S206).
- the encoding apparatus 100 uses the one or more motion vectors of one or more adjacent blocks to convert the first reference block in the first reference picture list and the second reference block in the second reference picture list. Can be identified. That is, the encoding apparatus 100 identifies the first reference block and the second reference block that are assumed to be strongly related to the encoding target block, using one or more motion vectors of one or more adjacent blocks. can do.
- the encoding apparatus 100 can derive a candidate motion vector from the first reference block and derive a candidate motion vector from the second reference block. Therefore, the encoding apparatus 100 can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector. As a result, the encoding apparatus 100 can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- each of the first reference block and the second reference block in the operation example shown in FIG. 32A is an ATMVP block.
- Each of the first reference block and the second reference block in the first operation example shown in FIG. 32A may be a co-located block instead of the ATMVP block.
- the first reference block in the first operation example shown in FIG. 32A may be a block having the same position as the current block in the first reference picture.
- the second reference block in the first operation example shown in FIG. 32A may be a block having the same position as the current block in the second reference picture.
- FIG. 32C is a flowchart illustrating a third operation example related to derivation of candidate motion vectors when a moving image is encoded.
- the encoding apparatus 100 illustrated in FIG. 31 may perform the operation illustrated in FIG. 32C when encoding a moving image.
- the circuit 160 of the encoding device 100 maps each of the plurality of reference blocks to the corresponding region in the encoding target image according to the motion vector of the reference block (S301).
- the plurality of reference blocks include one or more reference blocks included in the first reference picture and one or more reference blocks included in the second reference picture.
- the first reference picture is a picture that forms a first reference picture list of two reference picture lists for bi-prediction.
- the second reference picture is a picture constituting the second reference picture list of the two reference picture lists.
- the circuit 160 derives a candidate motion vector as one of a plurality of candidate motion vectors from the motion vector of the reference block mapped to the corresponding region. (S302).
- the plurality of candidate motion vectors are a plurality of candidate motion vectors for the predicted motion vector of the encoding target block.
- the circuit 160 selects a predicted motion vector from among a plurality of candidate motion vectors (S303). Then, the circuit 160 encodes the information of the encoding target block using the predicted motion vector (S304).
- the encoding apparatus 100 selects an appropriate candidate motion from a reference block that is assumed to be strongly related to the encoding target block among the plurality of reference blocks in the first reference picture list and the second reference picture list.
- a vector can be derived. Therefore, the encoding apparatus 100 can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector.
- the encoding apparatus 100 can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- the circuit 160 may map each of one or more reference blocks in the first reference picture in the encoding target image. Thereafter, the circuit 160 may map each of the one or more reference blocks in the second reference picture in an empty area in which one or more reference blocks in the first reference picture of the encoding target image are not mapped. .
- the encoding apparatus 100 can map one or more reference blocks in the first reference picture list with priority over one or more reference blocks in the second reference picture list.
- the reliability of the motion vector of the reference block in the first reference picture list may be higher than the reliability of the motion vector of the reference block in the second reference picture list.
- the encoding apparatus 100 can derive an appropriate candidate motion vector according to a motion vector with higher reliability.
- the circuit 160 may derive a candidate motion vector from at least one motion vector of two or more motion vectors of two or more reference blocks.
- the encoding apparatus 100 can derive an appropriate candidate motion vector from at least one reference block among a plurality of reference blocks assumed to be strongly related to the encoding target block.
- the circuit 160 may derive a candidate motion vector from the motion vector of the reference block mapped to the corresponding region overlapping the surrounding region.
- the encoding apparatus 100 derives an appropriate candidate motion vector according to the motion vector of the reference block mapped around the encoding target block even if the reference block is not mapped in the encoding target block. Can do.
- the circuit 160 when the circuit 160 selects a predicted motion vector from a plurality of candidate motion vectors, the circuit 160 evaluates each of the plurality of candidate motion vectors, and the candidate motion vector that is most highly evaluated among the plurality of candidate motion vectors. May be selected as the predicted motion vector.
- the circuit 160 may evaluate the candidate motion vector to be evaluated higher as the degree of matching between the reconstructed images of the two comparison target regions is higher.
- the two comparison target areas are two areas different from the encoding target block, and at least one of the two comparison target areas is determined according to the candidate motion vector to be evaluated.
- the encoding apparatus 100 can evaluate each candidate motion vector with reference to a reconstructed image in a region different from the encoding target block, and can select a predicted motion vector from a plurality of candidate motion vectors. . Therefore, the encoding apparatus 100 and the decoding apparatus 200 can select a predicted motion vector from among a plurality of candidate motion vectors by the same method. Therefore, the encoding apparatus 100 can omit the encoding of information for selecting the motion vector predictor, and can support the reduction of the code amount.
- the circuit 160 may derive the motion vector of the reference block to which the scaling ratio is applied as the candidate motion vector. .
- the scaling ratio is the ratio of the time difference from the current picture to the reference picture including the reference block to the time difference from the reference picture including the reference block to the reference picture including the reference area indicated by the motion vector of the reference block. It is.
- the encoding target picture is a picture including an encoding target image.
- the encoding apparatus 100 can appropriately scale the motion vector of the reference block, and can derive the scaled motion vector as a candidate motion vector.
- the encoding target block may be a block defined as a coding unit, or a sub-block defined with a predetermined size in a block defined as a coding unit.
- the encoding apparatus 100 can derive an appropriate candidate motion vector for a block of a coding unit or a sub-block in the block of a coding unit.
- the circuit 160 when the corresponding area overlaps the encoding target block, from the motion vector of the reference block mapped to the corresponding area, A vector may be derived.
- This candidate motion vector is a candidate motion vector for the predicted motion vector of the coding target block.
- the encoding device 100 can derive an appropriate candidate motion vector for each encoding target block in the encoding target image.
- FIG. 33 is a block diagram illustrating an implementation example of the decoding device 200 according to the first embodiment.
- the decoding device 200 includes a circuit 260 and a memory 262.
- a plurality of components of the decoding device 200 shown in FIGS. 10 and 17 are implemented by the circuit 260 and the memory 262 shown in FIG.
- the circuit 260 is a circuit that performs information processing and is a circuit that can access the memory 262.
- the circuit 260 is a general-purpose or dedicated electronic circuit that decodes a moving image.
- the circuit 260 may be a processor such as a CPU.
- the circuit 260 may be an aggregate of a plurality of electronic circuits. Further, for example, the circuit 260 may serve as a plurality of constituent elements excluding the constituent elements for storing information among the plurality of constituent elements of the decoding device 200 illustrated in FIG. 10 and the like.
- the memory 262 is a general purpose or dedicated memory in which information for the circuit 260 to decode a moving image is stored.
- the memory 262 may be an electronic circuit or may be connected to the circuit 260. Further, the memory 262 may be included in the circuit 260.
- the memory 262 may be an aggregate of a plurality of electronic circuits.
- the memory 262 may be a magnetic disk or an optical disk, or may be expressed as a storage or a recording medium. Further, the memory 262 may be a nonvolatile memory or a volatile memory.
- the memory 262 may store a bit sequence corresponding to the encoded moving image, or may store a moving image corresponding to the decoded bit sequence.
- the memory 262 may store a program for the circuit 260 to decode a moving image.
- the memory 262 may serve as a component for storing information among a plurality of components of the decoding device 200 illustrated in FIG. 10 and the like. Specifically, the memory 262 may serve as the block memory 210, the frame memory 214, and the candidate block information memory 236 shown in FIG. More specifically, the memory 262 may store a reconstructed block, a reconstructed picture, a motion vector used for inter prediction, and the like.
- the decoding device 200 not all of the plurality of components shown in FIG. 10 and the like may be implemented, or all of the plurality of processes described above may not be performed. Some of the plurality of components shown in FIG. 10 and the like may be included in another device, and some of the plurality of processes described above may be executed by another device. Then, in the decoding device 200, a part of the plurality of components shown in FIG. 10 and the like are mounted, and a part of the plurality of processes described above is performed, so that a moving image is appropriately generated with a small code amount. Can be processed.
- FIG. 34A is a flowchart showing a first operation example related to derivation of candidate motion vectors when decoding a moving image.
- the decoding device 200 illustrated in FIG. 33 may perform the operation illustrated in FIG. 34A when decoding a moving image.
- the circuit 260 of the decoding device 200 derives one or more candidate motion vectors for the predicted motion vector of the decoding target block from one or more motion vectors of the first reference block (S401).
- the first reference block is a block included in the first reference picture constituting the first reference picture list of the two reference picture lists for bi-prediction.
- the circuit 260 derives one or more candidate motion vectors for the predicted motion vector from one or more motion vectors of the second reference block (S402).
- the second reference block is a block included in the second reference picture constituting the second reference picture list of the two reference picture lists for bi-prediction.
- the circuit 260 selects a predicted motion vector from among a plurality of candidate motion vectors (S403).
- the plurality of candidate motion vectors are one or more candidate motion vectors derived from one or more motion vectors of the first reference block and one derived from one or more motion vectors of the second reference block.
- One or more candidate motion vectors are one or more candidate motion vectors.
- the circuit 260 decodes the information on the decoding target block using the predicted motion vector (S404).
- the decoding apparatus 200 can derive the candidate motion vector from the first reference block in the first reference picture list and can derive the candidate motion vector from the second reference block in the second reference picture list. Therefore, the decoding apparatus 200 can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector.
- the decoding apparatus 200 can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- the circuit 260 may apply two scaling ratios to one motion vector of the two motion vectors of the first reference block.
- the circuit 260 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the first reference block. May be.
- the circuit 260 may apply two scaling ratios to one motion vector of the two motion vectors of the second reference block.
- the circuit 260 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the second reference block. May be.
- the decoding apparatus 200 includes candidate motions including two candidate motion vectors that refer to two reference picture lists from one motion vector of the first reference block and one motion vector of the second reference block.
- a vector set can be derived. That is, the decoding apparatus 200 can derive two candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from two motion vectors having different characteristics.
- the circuit 260 performs motion of one of the two motion vectors of the first reference block. Two scaling ratios may be applied to the vector.
- the circuit 260 is configured to refer to the candidate motion vector for referring to the first reference picture list and the second reference picture list from one of the two motion vectors of the first reference block. Candidate motion vectors may be derived.
- the circuit 260 converts the motion vector to one motion vector of the two motion vectors of the second reference block.
- two scaling ratios may be applied.
- the circuit 260 is configured to refer to the candidate motion vector for referring to the first reference picture list and the second reference picture list from one of the two motion vectors of the second reference block.
- Candidate motion vectors may be derived.
- the decoding apparatus 200 generates a candidate motion vector set including two candidate motion vectors that refer to two reference picture lists from only one motion vector of two motion vectors that are assumed to have similar characteristics. Can be derived. Therefore, the decoding device 200 can improve the processing efficiency.
- the circuit 260 may apply two scaling ratios to each of the two motion vectors of the first reference block.
- the circuit 260 from the two motion vectors of the first reference block, two candidate motion vectors for referring to the first reference picture list and two candidate motions for referring to the second reference picture list.
- a vector may be derived.
- the circuit 260 may apply two scaling ratios to each of the two motion vectors of the second reference block.
- the circuit 260 uses the two candidate motion vectors for referring to the first reference picture list and the two candidate motions for referring to the second reference picture list from the two motion vectors of the second reference block.
- a vector may be derived.
- the decoding apparatus 200 can derive a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from each of the four motion vectors of two reference blocks. That is, the decoding apparatus 200 can derive four candidate motion vector sets each composed of two candidate motion vectors that can be used for bi-prediction, from four motion vectors of two reference blocks.
- the circuit 260 when the first reference block is decoded by bi-prediction, the circuit 260 is configured to refer to the first reference picture list from one of the two motion vectors of the first reference block.
- Candidate motion vectors may be derived.
- the circuit 260 may derive a candidate motion vector for referring to the second reference picture list from the other motion vector of the two motion vectors of the first reference block.
- the circuit 260 can select a candidate motion for referring to the first reference picture list from one of the two motion vectors of the second reference block.
- a vector may be derived.
- the circuit 260 may derive a candidate motion vector for referring to the second reference picture list from the other motion vector of the two motion vectors of the second reference block.
- the decoding apparatus 200 can derive four candidate motion vectors from the four motion vectors of the two reference blocks, respectively, and derive two candidate motion vector sets composed of the four candidate motion vectors. be able to. That is, the decoding apparatus 200 can appropriately reflect the four motion vectors of the two reference blocks on the four candidate motion vectors included in the two candidate motion vector sets.
- the circuit 260 may apply two scaling ratios to one motion vector of the first reference block.
- the circuit 260 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the first reference block. May be.
- the circuit 260 may apply two scaling ratios to one motion vector of the second reference block.
- the circuit 260 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the second reference block. May be.
- the decoding apparatus 200 can derive a candidate motion vector set composed of two candidate motion vectors referring to two reference picture lists from only one motion vector of each reference block. That is, the decoding apparatus 200 can derive a candidate motion vector set composed of two candidate motion vectors that can be used for bi-prediction from only one motion vector of each reference block.
- the decoding target block may be decoded by bi-prediction only in one direction among the forward direction and the backward direction in the display order.
- the circuit 260 may derive two or more candidate motion vectors for referring to one direction used for bi-prediction of the decoding target block from one or more motion vectors of the first reference block.
- the circuit 260 may derive two or more candidate motion vectors for referring to one direction used for bi-prediction of the decoding target block from one or more motion vectors of the second reference block. Good.
- the decoding apparatus 200 can derive two or more candidate motion vectors referring to the one direction from each reference block. Therefore, the decoding apparatus 200 can derive one or more candidate motion vector sets suitable for bi-prediction only in one direction from each reference block.
- the first reference picture list may be a reference picture list for referring to the forward direction in the display order.
- the second reference picture list may be a reference picture list for referring to the backward direction in the display order.
- the first reference block may be decoded by bi-prediction in both the forward and backward directions in the display order.
- the second reference block may be decoded by bi-prediction in both the forward and backward directions in the display order.
- the decoding target block may be decoded by bi-prediction in both the forward and backward directions in the display order.
- the circuit 260 may apply two scaling ratios to one motion vector for referring to the backward direction in the display order among the two motion vectors of the first reference block.
- the circuit 260 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the first reference block. May be.
- the circuit 260 may apply two scaling ratios to one motion vector for referring to the forward direction in the display order among the two motion vectors of the second reference block.
- the circuit 260 derives a candidate motion vector for referring to the first reference picture list and a candidate motion vector for referring to the second reference picture list from one motion vector of the second reference block. May be.
- the decoding apparatus 200 generates candidate motion vector sets that refer to the two reference picture lists from the motion vectors in the reference direction temporally from the reference block to the decoding target block among the two motion vectors of each reference block. Can be derived. That is, the decoding apparatus 200 appropriately derives a candidate motion vector set that can be used for bi-prediction from motion vectors that are temporally related to the decoding target block among the two motion vectors of each reference block. Can do.
- the spatial position of the first reference block may be the same as the spatial position of the decoding target block
- the spatial position of the second reference block may be the spatial position of the decoding target block. It may be the same as the position.
- FIG. 34B is a flowchart showing a second operation example related to derivation of candidate motion vectors when decoding a moving image.
- the decoding device 200 illustrated in FIG. 33 may perform the operation illustrated in FIG. 34B when decoding a moving image.
- the circuit 260 of the decoding device 200 specifies the first reference block included in the first reference picture using the first motion vector of the first adjacent block spatially adjacent to the decoding target block ( S501).
- the first reference picture is a picture constituting the first reference picture list of the two reference picture lists for bi-prediction.
- the circuit 260 derives one or more candidate motion vectors for the predicted motion vector of the decoding target block from one or more motion vectors of the first reference block (S502).
- the circuit 260 uses the first motion vector, the second motion vector of the first adjacent block, or the third motion vector of the second adjacent block spatially adjacent to the decoding target block to generate the second reference picture.
- the second reference block included is specified (S503).
- the second reference picture is a picture constituting the second reference picture list of the two reference picture lists.
- the circuit 260 derives one or more candidate motion vectors for the predicted motion vector from one or more motion vectors of the second reference block (S504).
- the circuit 260 selects a predicted motion vector from among a plurality of candidate motion vectors (S505).
- the plurality of candidate motion vectors are one or more candidate motion vectors derived from one or more motion vectors of the first reference block and one derived from one or more motion vectors of the second reference block.
- One or more candidate motion vectors are one or more candidate motion vectors.
- the circuit 260 decodes the information on the decoding target block using the predicted motion vector (S506).
- the decoding apparatus 200 identifies the first reference block in the first reference picture list and the second reference block in the second reference picture list using one or more motion vectors of one or more adjacent blocks. can do. That is, the decoding apparatus 200 specifies the first reference block and the second reference block that are assumed to be strongly related to the decoding target block, using one or more motion vectors of one or more adjacent blocks. Can do.
- the decoding apparatus 200 can derive a candidate motion vector from the first reference block and derive a candidate motion vector from the second reference block. Therefore, the decoding apparatus 200 can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector. Thus, the decoding apparatus 200 can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- each of the first reference block and the second reference block in the operation example shown in FIG. 34A is an ATMVP block.
- Each of the first reference block and the second reference block in the first operation example shown in FIG. 34A may be a co-located block instead of the ATMVP block.
- the first reference block in the first operation example illustrated in FIG. 34A may be a block having the same position as the decoding target block in the first reference picture.
- the second reference block in the first operation example shown in FIG. 34A may be a block having the same position as the decoding target block in the second reference picture.
- FIG. 34C is a flowchart illustrating a third operation example regarding derivation of candidate motion vectors at the time of decoding a moving image.
- the decoding device 200 illustrated in FIG. 33 may perform the operation illustrated in FIG. 34C when decoding a moving image.
- the circuit 260 of the decoding device 200 maps each of the plurality of reference blocks to the corresponding region in the decoding target image according to the motion vector of the reference block (S601).
- the plurality of reference blocks include one or more reference blocks included in the first reference picture and one or more reference blocks included in the second reference picture.
- the first reference picture is a picture that forms a first reference picture list of two reference picture lists for bi-prediction.
- the second reference picture is a picture constituting the second reference picture list of the two reference picture lists.
- the circuit 260 derives a candidate motion vector as one of a plurality of candidate motion vectors from the motion vector of the reference block mapped to the corresponding region (S602). ).
- the plurality of candidate motion vectors are a plurality of candidate motion vectors for the prediction motion vector of the decoding target block.
- the circuit 260 selects a predicted motion vector from among a plurality of candidate motion vectors (S603). Then, the circuit 260 decodes the information of the decoding target block using the predicted motion vector (S604).
- the decoding apparatus 200 selects an appropriate candidate motion vector from a reference block that is assumed to be strongly related to the decoding target block among a plurality of reference blocks in the first reference picture list and the second reference picture list. Can be derived. Therefore, the decoding apparatus 200 can increase the possibility that an appropriate candidate motion vector is included in a plurality of candidate motion vectors for selecting a predicted motion vector.
- the decoding apparatus 200 can support the derivation of an appropriate prediction motion vector, and can support the reduction of the code amount related to the moving image.
- the circuit 260 may map each of one or more reference blocks in the first reference picture in the decoding target image. Thereafter, the circuit 260 may map each of the one or more reference blocks in the second reference picture in an empty area where one or more reference blocks in the first reference picture of the decoding target image are not mapped.
- the decoding apparatus 200 can map one or more reference blocks in the first reference picture list with priority over one or more reference blocks in the second reference picture list.
- the reliability of the motion vector of the reference block in the first reference picture list may be higher than the reliability of the motion vector of the reference block in the second reference picture list.
- the decoding apparatus 200 can derive an appropriate candidate motion vector according to a motion vector with higher reliability.
- the circuit 260 may derive a candidate motion vector from at least one motion vector of two or more motion vectors of two or more reference blocks.
- the decoding apparatus 200 can derive an appropriate candidate motion vector from at least one reference block among a plurality of reference blocks assumed to be strongly related to the decoding target block.
- the circuit 260 may derive a candidate motion vector from the motion vector of the reference block mapped to the corresponding region overlapping the surrounding region.
- the decoding apparatus 200 can derive an appropriate candidate motion vector according to the motion vector of the reference block mapped around the decoding target block even if the reference block is not mapped in the decoding target block.
- each of the plurality of candidate motion vectors is evaluated, and the candidate motion vector that is most highly evaluated among the plurality of candidate motion vectors May be selected as the predicted motion vector.
- the circuit 260 may evaluate the candidate motion vector to be evaluated higher as the degree of matching between the reconstructed images of the two comparison target regions is higher.
- the two comparison target regions are two regions different from the decoding target block, and at least one is two regions determined according to the candidate motion vector to be evaluated.
- the decoding apparatus 200 can evaluate each candidate motion vector with reference to a reconstructed image in a region different from the decoding target block, and select a predicted motion vector from a plurality of candidate motion vectors. Therefore, the encoding apparatus 100 and the decoding apparatus 200 can select a predicted motion vector from among a plurality of candidate motion vectors by the same method. Therefore, the decoding apparatus 200 can omit decoding of information for selecting a motion vector predictor, and can assist in reducing the amount of codes.
- the circuit 260 may derive the motion vector of the reference block to which the scaling ratio is applied as the candidate motion vector. .
- the scaling ratio is the ratio of the time difference from the decoding target picture to the reference picture including the reference block to the time difference from the reference picture including the reference block to the reference picture including the reference area indicated by the motion vector of the reference block. is there.
- the decoding target picture is a picture including a decoding target image.
- the decoding apparatus 200 can appropriately scale the motion vector of the reference block, and can derive the scaled motion vector as a candidate motion vector.
- the decoding target block may be a block defined as a decoding unit, or a sub-block defined with a predetermined size in a block defined as a decoding unit.
- the decoding apparatus 200 can derive an appropriate candidate motion vector for a decoding unit block or a sub-block in the decoding unit block.
- the circuit 260 derives a candidate motion vector from the motion vector of the reference block mapped to the corresponding region when the corresponding region overlaps the decoding target block. May be.
- the candidate motion vector is a candidate motion vector for the predicted motion vector of the decoding target block.
- the decoding apparatus 200 can derive an appropriate candidate motion vector for each decoding target block in the decoding target image.
- the first reference picture list described above is one of the L0 reference picture list and the L1 picture list
- the second reference picture list described above is the other of the L0 reference picture list and the L1 picture list.
- the first reference picture list may be an L0 reference picture list and the second reference picture list may be an L1 reference picture list.
- the first reference picture list may be an L1 reference picture list
- the second reference picture list may be an L0 reference picture list.
- the motion vector of the reference block may be scaled to a candidate motion vector that refers to another reference picture different from the reference picture whose reference picture index is 0 from the processing target block. Further, the motion vector of the reference block may be derived as a candidate motion vector without being scaled.
- the scaling process may be skipped in the application of the scaling ratio.
- the encoding device 100 and the decoding device 200 in the present embodiment may be used as an image encoding device and an image decoding device, respectively, or may be used as a moving image encoding device and a moving image decoding device, respectively. Good.
- the encoding device 100 and the decoding device 200 can each be used as an inter prediction device.
- the encoding device 100 and the decoding device 200 may correspond only to the inter prediction unit 126 including the candidate list generation unit 134 and the inter prediction unit 218 including the candidate list generation unit 234, respectively.
- the entropy encoding unit 110, the entropy decoding unit 202, and the like may be included in other devices.
- each component may be configured by dedicated hardware or may be realized by executing a software program suitable for each component.
- Each component may be realized by a program execution unit such as a CPU or a processor reading and executing a software program recorded on a recording medium such as a hard disk or a semiconductor memory.
- each of the encoding device 100 and the decoding device 200 includes a processing circuit (Processing Circuit) and a storage device (Storage) electrically connected to the processing circuit and accessible from the processing circuit. You may have.
- the processing circuit corresponds to the circuit 160 or 260
- the storage device corresponds to the memory 162 or 262.
- the processing circuit includes at least one of dedicated hardware and a program execution unit, and executes processing using a storage device. Further, when the processing circuit includes a program execution unit, the storage device stores a software program executed by the program execution unit.
- the software that realizes the encoding apparatus 100 or the decoding apparatus 200 of the present embodiment is the following program.
- this program is an encoding method for encoding moving picture information to a computer, and uses the first reference picture that constitutes the first reference picture list of two reference picture lists for bi-prediction.
- One or more candidate motion vectors for the prediction motion vector of the encoding target block are derived from one or more motion vectors of the first reference block included, and a second reference picture list of the two reference picture lists is determined.
- One or more candidate motion vectors for the predicted motion vector are derived from one or more motion vectors of a second reference block included in a second reference picture constituting the one or more motion vectors of the first reference block. Derived from one or more candidate motion vectors derived from and one or more motion vectors of the second reference block.
- this program is a decoding method for decoding moving picture information in a computer, and is included in a first reference picture constituting a first reference picture list of two reference picture lists for bi-prediction.
- One or more candidate motion vectors for the prediction motion vector of the decoding target block are derived from one or more motion vectors of the first reference block, and a second reference picture list of the two reference picture lists is configured.
- One or more candidate motion vectors for the prediction motion vector are derived from one or more motion vectors of a second reference block included in two reference pictures, and are derived from the one or more motion vectors of the first reference block. 1 derived from one or more candidate motion vectors and one or more motion vectors of the second reference block.
- the prediction motion vector may be selected from a plurality of candidate motion vectors including the above candidate motion vectors, and a decoding method for decoding the decoding target block information using the prediction motion vector may be executed. .
- Each component may be a circuit as described above. These circuits may constitute one circuit as a whole, or may be separate circuits. Each component may be realized by a general-purpose processor or a dedicated processor.
- the encoding / decoding device may include the encoding device 100 and the decoding device 200.
- the first and second ordinal numbers used in the description may be replaced as appropriate.
- an ordinal number may be newly given to a component or the like, or may be removed.
- the aspect of the encoding apparatus 100 and the decoding apparatus 200 was demonstrated based on embodiment, the aspect of the encoding apparatus 100 and decoding apparatus 200 is not limited to this embodiment. As long as it does not deviate from the gist of the present disclosure, the encoding device 100 and the decoding device 200 may be configured in which various modifications conceived by those skilled in the art have been made in the present embodiment, or in a form constructed by combining components in different embodiments. It may be included within the scope of the embodiment.
- each of the functional blocks can usually be realized by an MPU, a memory, and the like. Further, the processing by each functional block is usually realized by a program execution unit such as a processor reading and executing software (program) recorded on a recording medium such as a ROM. The software may be distributed by downloading or the like, or may be distributed by being recorded on a recording medium such as a semiconductor memory. Naturally, each functional block can be realized by hardware (dedicated circuit).
- each embodiment may be realized by centralized processing using a single device (system), or may be realized by distributed processing using a plurality of devices. Good.
- the number of processors that execute the program may be one or more. That is, centralized processing may be performed, or distributed processing may be performed.
- the system includes an image encoding device using an image encoding method, an image decoding device using an image decoding method, and an image encoding / decoding device including both.
- Other configurations in the system can be appropriately changed according to circumstances.
- FIG. 35 is a diagram showing an overall configuration of a content supply system ex100 that implements a content distribution service.
- the communication service providing area is divided into desired sizes, and base stations ex106, ex107, ex108, ex109, and ex110, which are fixed wireless stations, are installed in each cell.
- devices such as a computer ex111, a game machine ex112, a camera ex113, a home appliance ex114, and a smartphone ex115 via the Internet ex101, the Internet service provider ex102 or the communication network ex104, and the base stations ex106 to ex110.
- the content supply system ex100 may be connected by combining any of the above elements.
- Each device may be directly or indirectly connected to each other via a telephone network or a short-range wireless communication without using the base stations ex106 to ex110 which are fixed wireless stations.
- the streaming server ex103 is connected to each device such as a computer ex111, a game machine ex112, a camera ex113, a home appliance ex114, and a smartphone ex115 via the Internet ex101.
- the streaming server ex103 is connected to a terminal in a hot spot in the airplane ex117 via the satellite ex116.
- the streaming server ex103 may be directly connected to the communication network ex104 without going through the Internet ex101 or the Internet service provider ex102, or may be directly connected to the airplane ex117 without going through the satellite ex116.
- the camera ex113 is a device that can shoot still images and moving images such as a digital camera.
- the smartphone ex115 is a smartphone, a mobile phone, a PHS (Personal Handyphone System), or the like that corresponds to a mobile communication system generally called 2G, 3G, 3.9G, 4G, and 5G in the future.
- PHS Personal Handyphone System
- the home appliance ex118 is a device included in a refrigerator or a household fuel cell cogeneration system.
- a terminal having a photographing function is connected to the streaming server ex103 through the base station ex106 or the like, thereby enabling live distribution or the like.
- the terminal (computer ex111, game machine ex112, camera ex113, home appliance ex114, smartphone ex115, terminal in airplane ex117, etc.) is used for the still image or video content captured by the user using the terminal.
- the encoding process described in each embodiment is performed, and the video data obtained by the encoding and the sound data obtained by encoding the sound corresponding to the video are multiplexed, and the obtained data is transmitted to the streaming server ex103. That is, each terminal functions as an image encoding device according to an aspect of the present disclosure.
- the streaming server ex103 streams the content data transmitted to the requested client.
- the client is a computer or the like in the computer ex111, the game machine ex112, the camera ex113, the home appliance ex114, the smart phone ex115, or the airplane ex117 that can decode the encoded data.
- Each device that has received the distributed data decrypts and reproduces the received data. That is, each device functions as an image decoding device according to an aspect of the present disclosure.
- the streaming server ex103 may be a plurality of servers or a plurality of computers, and may process, record, and distribute data in a distributed manner.
- the streaming server ex103 may be realized by a CDN (Contents Delivery Network), and content distribution may be realized by a network connecting a large number of edge servers and edge servers distributed all over the world.
- CDN Contents Delivery Network
- edge servers that are physically close to each other are dynamically allocated according to clients. Then, the content can be cached and distributed to the edge server, thereby reducing the delay.
- the processing is distributed among multiple edge servers, the distribution subject is switched to another edge server, or the part of the network where the failure has occurred Since detouring can be continued, high-speed and stable distribution can be realized.
- the captured data may be encoded at each terminal, may be performed on the server side, or may be shared with each other.
- a processing loop is performed twice.
- the first loop the complexity of the image or the code amount in units of frames or scenes is detected.
- the second loop processing for maintaining the image quality and improving the coding efficiency is performed.
- the terminal performs the first encoding process
- the server receiving the content performs the second encoding process, thereby improving the quality and efficiency of the content while reducing the processing load on each terminal. it can.
- the encoded data of the first time performed by the terminal can be received and reproduced by another terminal, enabling more flexible real-time distribution.
- the camera ex113 or the like extracts a feature amount from an image, compresses data relating to the feature amount as metadata, and transmits the metadata to the server.
- the server performs compression according to the meaning of the image, for example, by determining the importance of the object from the feature amount and switching the quantization accuracy.
- the feature data is particularly effective for improving the accuracy and efficiency of motion vector prediction at the time of re-compression on the server.
- simple coding such as VLC (variable length coding) may be performed at the terminal, and coding with a large processing load such as CABAC (context adaptive binary arithmetic coding) may be performed at the server.
- a plurality of video data in which almost the same scene is captured by a plurality of terminals.
- a GOP Group of Picture
- a picture unit or a tile obtained by dividing a picture using a plurality of terminals that have performed shooting and other terminals and servers that have not performed shooting as necessary.
- Distributed processing is performed by assigning encoding processing in units or the like. Thereby, delay can be reduced and real-time property can be realized.
- the server may manage and / or instruct the video data captured by each terminal to refer to each other.
- the encoded data from each terminal may be received by the server and the reference relationship may be changed among a plurality of data, or the picture itself may be corrected or replaced to be encoded again. This makes it possible to generate a stream with improved quality and efficiency of each piece of data.
- the server may distribute the video data after performing transcoding to change the encoding method of the video data.
- the server may convert the MPEG encoding system to the VP encoding. H.264 in H.264. It may be converted into H.265.
- the encoding process can be performed by a terminal or one or more servers. Therefore, in the following, description such as “server” or “terminal” is used as the subject performing processing, but part or all of processing performed by the server may be performed by the terminal, or processing performed by the terminal may be performed. Some or all may be performed at the server. The same applies to the decoding process.
- the server not only encodes a two-dimensional moving image, but also encodes a still image automatically based on a scene analysis of the moving image or at a time specified by the user and transmits it to the receiving terminal. Also good.
- the server can acquire the relative positional relationship between the photographing terminals, the server obtains the three-dimensional shape of the scene based on not only the two-dimensional moving image but also the video obtained by photographing the same scene from different angles. Can be generated.
- the server may separately encode the three-dimensional data generated by the point cloud or the like, and the video to be transmitted to the receiving terminal based on the result of recognizing or tracking the person or the object using the three-dimensional data.
- the images may be selected or reconstructed from videos captured by a plurality of terminals.
- the user can arbitrarily select each video corresponding to each photographing terminal and enjoy a scene, or can display a video of an arbitrary viewpoint from three-dimensional data reconstructed using a plurality of images or videos. You can also enjoy the clipped content.
- sound is collected from a plurality of different angles, and the server may multiplex and transmit sound from a specific angle or space according to the video.
- the server may create viewpoint images for the right eye and the left eye, respectively, and perform encoding that allows reference between each viewpoint video by Multi-View Coding (MVC) or the like. You may encode as another stream, without referring. At the time of decoding another stream, it is preferable to reproduce in synchronization with each other so that a virtual three-dimensional space is reproduced according to the viewpoint of the user.
- MVC Multi-View Coding
- the server superimposes virtual object information in the virtual space on the camera information in the real space based on the three-dimensional position or the movement of the user's viewpoint.
- the decoding device may acquire or hold virtual object information and three-dimensional data, generate a two-dimensional image according to the movement of the user's viewpoint, and create superimposition data by connecting them smoothly.
- the decoding device transmits the movement of the user's viewpoint to the server in addition to the request for the virtual object information, and the server creates superimposition data according to the movement of the viewpoint received from the three-dimensional data held in the server,
- the superimposed data may be encoded and distributed to the decoding device.
- the superimposed data has an ⁇ value indicating transparency in addition to RGB
- the server sets the ⁇ value of a portion other than the object created from the three-dimensional data to 0 or the like, and the portion is transparent. May be encoded.
- the server may generate data in which a RGB value of a predetermined value is set as the background, such as a chroma key, and the portion other than the object is set to the background color.
- the decryption processing of the distributed data may be performed at each terminal as a client, may be performed on the server side, or may be performed in a shared manner.
- a terminal may once send a reception request to the server, receive content corresponding to the request at another terminal, perform a decoding process, and transmit a decoded signal to a device having a display.
- a part of a region such as a tile in which a picture is divided may be decoded and displayed on a viewer's personal terminal while receiving large-size image data on a TV or the like. Accordingly, it is possible to confirm at hand the area in which the person is responsible or the area to be confirmed in more detail while sharing the whole image.
- access to encoded data on the network such as when the encoded data is cached in a server that can be accessed from the receiving terminal in a short time, or copied to the edge server in the content delivery service. It is also possible to switch the bit rate of received data based on ease.
- the content switching will be described using a scalable stream that is compression-encoded by applying the moving image encoding method shown in each of the above embodiments shown in FIG.
- the server may have a plurality of streams of the same content and different quality as individual streams, but the temporal / spatial scalable implementation realized by dividing into layers as shown in the figure.
- the configuration may be such that the content is switched by utilizing the characteristics of the stream.
- the decoding side decides which layer to decode according to internal factors such as performance and external factors such as the state of communication bandwidth, so that the decoding side can combine low-resolution content and high-resolution content. You can switch freely and decrypt. For example, when the user wants to continue watching the video that was viewed on the smartphone ex115 while moving on a device such as an Internet TV after returning home, the device only has to decode the same stream to a different layer, so the load on the server side Can be reduced.
- the enhancement layer includes meta information based on image statistical information, etc., in addition to the configuration in which the picture is encoded for each layer and the enhancement layer exists above the base layer.
- the decoding side may generate content with high image quality by super-resolution of the base layer picture based on the meta information.
- Super-resolution may be either improvement of the SN ratio at the same resolution or enlargement of the resolution.
- the meta information includes information for specifying a linear or non-linear filter coefficient used for super-resolution processing, or information for specifying a parameter value in filter processing, machine learning, or least square calculation used for super-resolution processing. .
- the picture may be divided into tiles or the like according to the meaning of the object in the image, and the decoding side may select only a part of the region by selecting the tile to be decoded.
- the decoding side can determine the position of the desired object based on the meta information. Can be identified and the tile containing the object can be determined.
- the meta information is stored using a data storage structure different from the pixel data such as the SEI message in HEVC. This meta information indicates, for example, the position, size, or color of the main object.
- meta information may be stored in units composed of a plurality of pictures, such as streams, sequences, or random access units.
- the decoding side can acquire the time when the specific person appears in the video, etc., and can match the picture in which the object exists and the position of the object in the picture by combining with the information in units of pictures.
- FIG. 38 shows an example of a web page display screen on the computer ex111 or the like.
- FIG. 39 is a diagram illustrating a display screen example of a web page on the smartphone ex115 or the like.
- the web page may include a plurality of link images that are links to the image content, and the appearance differs depending on the browsing device.
- the display device when a plurality of link images are visible on the screen, the display device until the user explicitly selects the link image, or until the link image approaches the center of the screen or the entire link image enters the screen.
- the (decoding device) displays a still image or an I picture included in each content as a link image, displays a video like a gif animation with a plurality of still images or I pictures, or receives only a base layer to receive a video. Are decoded and displayed.
- the display device When the link image is selected by the user, the display device decodes the base layer with the highest priority. If there is information indicating that the HTML constituting the web page is scalable content, the display device may decode up to the enhancement layer. Also, in order to ensure real-time properties, the display device only decodes forward reference pictures (I picture, P picture, forward reference only B picture) before being selected or when the communication band is very strict. In addition, the delay between the decoding time of the first picture and the display time (delay from the start of content decoding to the start of display) can be reduced by displaying. Further, the display device may intentionally ignore the reference relationship of pictures and roughly decode all B pictures and P pictures with forward reference, and perform normal decoding as the number of received pictures increases over time.
- forward reference pictures I picture, P picture, forward reference only B picture
- the receiving terminal when transmitting and receiving still image or video data such as two-dimensional or three-dimensional map information for automatic driving or driving support of a car, the receiving terminal adds meta data to image data belonging to one or more layers. Weather or construction information may also be received and decoded in association with each other. The meta information may belong to a layer or may be simply multiplexed with image data.
- the receiving terminal since the car, drone, airplane, or the like including the receiving terminal moves, the receiving terminal transmits the position information of the receiving terminal at the time of the reception request, thereby seamless reception and decoding while switching the base stations ex106 to ex110. Can be realized.
- the receiving terminal can dynamically switch how much meta-information is received or how much map information is updated according to the user's selection, the user's situation, or the communication band state. become.
- the encoded information transmitted by the user can be received, decoded and reproduced in real time by the client.
- the content supply system ex100 can perform not only high-quality and long-time content by a video distributor but also unicast or multicast distribution of low-quality and short-time content by an individual. Moreover, such personal contents are expected to increase in the future.
- the server may perform the encoding process after performing the editing process. This can be realized, for example, with the following configuration.
- the server After shooting, the server performs recognition processing such as shooting error, scene search, semantic analysis, and object detection from the original image or encoded data. Then, the server manually or automatically corrects out-of-focus or camera shake based on the recognition result, or selects a less important scene such as a scene whose brightness is lower than that of other pictures or is out of focus. Edit such as deleting, emphasizing the edge of an object, and changing the hue.
- the server encodes the edited data based on the editing result. It is also known that if the shooting time is too long, the audience rating will decrease, and the server will move not only in the less important scenes as described above, but also in motion according to the shooting time. A scene with few images may be automatically clipped based on the image processing result. Alternatively, the server may generate and encode a digest based on the result of the semantic analysis of the scene.
- the server may change and encode the face of the person in the periphery of the screen or the inside of the house into an unfocused image.
- the server recognizes whether or not a face of a person different from the person registered in advance is shown in the encoding target image, and if so, performs processing such as applying a mosaic to the face part. May be.
- the user designates a person or background area that the user wants to process an image from the viewpoint of copyright, etc., and the server replaces the designated area with another video or blurs the focus. It is also possible to perform such processing. If it is a person, the face image can be replaced while tracking the person in the moving image.
- the decoding device first receives the base layer with the highest priority and performs decoding and reproduction, depending on the bandwidth.
- the decoding device may receive the enhancement layer during this time, and may play back high-quality video including the enhancement layer when played back twice or more, such as when playback is looped.
- a stream that is scalable in this way can provide an experience in which the stream becomes smarter and the image is improved gradually, although it is a rough moving picture when it is not selected or at the beginning of viewing.
- the same experience can be provided even if the coarse stream played back the first time and the second stream coded with reference to the first video are configured as one stream. .
- these encoding or decoding processes are generally processed in the LSI ex500 included in each terminal.
- the LSI ex500 may be configured as a single chip or a plurality of chips.
- moving image encoding or decoding software is incorporated into some recording medium (CD-ROM, flexible disk, hard disk, etc.) that can be read by the computer ex111 and the like, and encoding or decoding processing is performed using the software. Also good.
- moving image data acquired by the camera may be transmitted. The moving image data at this time is data encoded by the LSI ex500 included in the smartphone ex115.
- the LSI ex500 may be configured to download and activate application software.
- the terminal first determines whether the terminal is compatible with the content encoding method or has a specific service execution capability. If the terminal does not support the content encoding method or does not have the capability to execute a specific service, the terminal downloads a codec or application software, and then acquires and reproduces the content.
- the content supply system ex100 via the Internet ex101, but also a digital broadcasting system, at least the moving image encoding device (image encoding device) or the moving image decoding device (image decoding device) of the above embodiments. Any of these can be incorporated.
- the unicasting of the content supply system ex100 is suitable for multicasting because it uses a satellite or the like to transmit and receive multiplexed data in which video and sound are multiplexed on broadcasting radio waves.
- the same application is possible for the encoding process and the decoding process.
- FIG. 40 is a diagram illustrating the smartphone ex115.
- FIG. 41 is a diagram illustrating a configuration example of the smartphone ex115.
- the smartphone ex115 receives the antenna ex450 for transmitting / receiving radio waves to / from the base station ex110, the camera unit ex465 capable of taking video and still images, the video captured by the camera unit ex465, and the antenna ex450.
- a display unit ex458 for displaying data obtained by decoding the video or the like.
- the smartphone ex115 further includes an operation unit ex466 that is a touch panel or the like, a voice output unit ex457 that is a speaker or the like for outputting voice or sound, a voice input unit ex456 that is a microphone or the like for inputting voice, and photographing.
- Memory unit ex467 that can store encoded video or still image, recorded audio, received video or still image, encoded data such as mail, or decoded data, and a user, and network
- An external memory may be used instead of the memory unit ex467.
- a main control unit ex460 that comprehensively controls the display unit ex458, the operation unit ex466, and the like, a power supply circuit unit ex461, an operation input control unit ex462, a video signal processing unit ex455, a camera interface unit ex463, a display control unit ex459, a modulation / Demodulation unit ex452, multiplexing / demultiplexing unit ex453, audio signal processing unit ex454, slot unit ex464, and memory unit ex467 are connected via bus ex470.
- the power supply circuit unit ex461 starts up the smartphone ex115 in an operable state by supplying power from the battery pack to each unit.
- the smartphone ex115 performs processing such as calling and data communication based on the control of the main control unit ex460 having a CPU, a ROM, a RAM, and the like.
- the voice signal picked up by the voice input unit ex456 is converted into a digital voice signal by the voice signal processing unit ex454, spread spectrum processed by the modulation / demodulation unit ex452, and digital / analog converted by the transmission / reception unit ex451.
- the data is transmitted via the antenna ex450.
- the received data is amplified and subjected to frequency conversion processing and analog-digital conversion processing, spectrum despreading processing is performed by the modulation / demodulation unit ex452, and converted to analog audio signal by the audio signal processing unit ex454, and then this is output to the audio output unit ex457.
- text, still image, or video data is sent to the main control unit ex460 via the operation input control unit ex462 by the operation of the operation unit ex466 of the main body unit, and transmission / reception processing is performed similarly.
- the video signal processing unit ex455 uses the video signal stored in the memory unit ex467 or the video signal input from the camera unit ex465 as described above.
- the video data is compressed and encoded by the moving image encoding method shown in the form, and the encoded video data is sent to the multiplexing / demultiplexing unit ex453.
- the audio signal processing unit ex454 encodes the audio signal picked up by the audio input unit ex456 while the camera unit ex465 captures a video or a still image, and sends the encoded audio data to the multiplexing / separating unit ex453. To do.
- the multiplexing / demultiplexing unit ex453 multiplexes the encoded video data and the encoded audio data by a predetermined method, and the modulation / demodulation unit (modulation / demodulation circuit unit) ex452 and the modulation / demodulation unit ex451 perform modulation processing and conversion.
- the data is processed and transmitted via the antenna ex450.
- the multiplexing / demultiplexing unit ex453 performs multiplexing By separating the data, the multiplexed data is divided into a bit stream of video data and a bit stream of audio data, and the encoded video data is supplied to the video signal processing unit ex455 via the synchronization bus ex470. The converted audio data is supplied to the audio signal processing unit ex454.
- the video signal processing unit ex455 decodes the video signal by the video decoding method corresponding to the video encoding method shown in each of the above embodiments, and is linked from the display unit ex458 via the display control unit ex459.
- a video or still image included in the moving image file is displayed.
- the audio signal processing unit ex454 decodes the audio signal, and the audio is output from the audio output unit ex457. Since real-time streaming is widespread, depending on the user's situation, there may be occasions where audio playback is not socially appropriate. Therefore, it is desirable that the initial value is a configuration in which only the video data is reproduced without reproducing the audio signal. Audio may be synchronized and played back only when the user performs an operation such as clicking on video data.
- the smartphone ex115 has been described here as an example, in addition to a transmission / reception terminal having both an encoder and a decoder as a terminal, a transmission terminal having only an encoder and a reception having only a decoder There are three possible mounting formats: terminals.
- terminals In the digital broadcasting system, it has been described as receiving or transmitting multiplexed data in which audio data or the like is multiplexed with video data.
- multiplexed data includes character data related to video in addition to audio data. Multiplexing may be performed, and video data itself may be received or transmitted instead of multiplexed data.
- the terminal often includes a GPU. Therefore, a configuration may be adopted in which a wide area is processed in a lump by utilizing the performance of the GPU by using a memory shared by the CPU and the GPU or a memory whose addresses are managed so as to be used in common. As a result, the encoding time can be shortened, real-time performance can be ensured, and low delay can be realized. In particular, it is efficient to perform motion search, deblocking filter, SAO (Sample Adaptive Offset), and transformation / quantization processing in batches in units of pictures or the like instead of the CPU.
- SAO Sample Adaptive Offset
- the present disclosure can be used for, for example, a television receiver, a digital video recorder, a car navigation, a mobile phone, a digital camera, a digital video camera, a video conference system, or an electronic mirror.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
符号化装置(100)は、メモリ(162)と、メモリ(162)にアクセス可能な回路(160)とを備え、メモリ(162)にアクセス可能な回路(160)は、第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、1つ以上の候補動きベクトルを導出し、第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、1つ以上の候補動きベクトルを導出し、複数の候補動きベクトルの中から、予測動きベクトルを選択し、予測動きベクトルを用いて、符号化対象ブロックの情報を符号化する。
Description
本開示は、動画像の情報を符号化する符号化装置等に関する。
従来、動画像を符号化するための規格として、H.265が存在する。H.265は、HEVC(High Efficiency Video Coding)とも呼ばれる。
H.265(ISO/IEC 23008-2 HEVC(High Efficiency Coding))
しかしながら、動画像の符号量が多くなれば、動画像の伝送遅延が大きくなり、動画像の記憶容量も大きくなる。その結果、資源及びエネルギー等の消費量が多くなる。
そこで、本開示は、動画像に関する符号量の削減を支援することができる符号化装置等を提供する。
本開示の一態様に係る符号化装置は、動画像の情報を符号化する符号化装置であって、メモリと、前記メモリにアクセス可能な回路とを備え、前記メモリにアクセス可能な前記回路は、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記符号化対象ブロックの情報を符号化する。
なお、これらの包括的又は具体的な態様は、システム、装置、方法、集積回路、コンピュータプログラム、又は、コンピュータ読み取り可能なCD-ROMなどの非一時的な記録媒体で実現されてもよく、システム、装置、方法、集積回路、コンピュータプログラム、及び、記録媒体の任意な組み合わせで実現されてもよい。
本開示の一態様に係る符号化装置等は、動画像に関する符号量の削減を支援することができる。
(本開示の基礎となった知見)
動画像を構成するブロックの符号化において、画面間予測が用いられる場合がある。画面間予測は、動き補償とも呼ばれる。
動画像を構成するブロックの符号化において、画面間予測が用いられる場合がある。画面間予測は、動き補償とも呼ばれる。
例えば、符号化装置は、符号化対象ブロックの符号化に画面間予測を用いる場合、動画像の動きを検出(推定)することにより、符号化対象ブロックの動きベクトルを検出する。そして、符号化装置は、符号化対象ブロックとは時間的に異なる参照ピクチャにおいて符号化対象ブロックの動きベクトルによって指し示される画像を参照して、符号化対象ブロックの予測画像を生成する。そして、符号化装置は、符号化対象ブロックの画像と、符号化対象ブロックの予測画像との差分画像を符号化する。
符号化装置は、符号化対象ブロックの動きベクトルを符号化してもよい。この場合、復号装置は、復号対象ブロックの動きベクトル及び差分画像を復号し、復号対象ブロックの動きベクトル及び差分画像を用いて復号対象ブロックを復号する。
具体的には、復号装置は、復号対象ブロックとは時間的に異なる参照ピクチャにおいて復号対象ブロックの動きベクトルによって指し示される画像を参照して、復号対象ブロックの予測画像を生成する。そして、復号装置は、復号対象ブロックの予測画像と、復号対象ブロックの差分画像とを加算することにより、復号対象ブロックの画像を再構成する。
符号化装置は、符号化対象ブロックの動きベクトルの符号化において、符号化対象ブロックの動きベクトルと、符号化対象ブロックの予測動きベクトルとの差分動きベクトルを符号化してもよい。
この場合、符号化装置は、複数のブロックの複数の動きベクトルから、予測動きベクトルに対する複数の候補動きベクトルを導出する。この複数のブロックは、例えば、符号化対象ブロックとは空間的に異なる複数のブロック、及び、符号化対象ブロックとは時間的に異なる1つのブロックを含む。そして、符号化装置は、複数の候補動きベクトルの中から予測動きベクトルを特定するための予測動きベクトルインデックスを符号化する。
そして、復号装置は、復号対象ブロックの差分動きベクトル及び予測動きベクトルインデックスを復号する。また、復号装置は、複数のブロックの複数の動きベクトルから、予測動きベクトルに対する複数の候補動きベクトルを導出する。この複数のブロックは、符号化時において複数の候補動きベクトルの導出に用いられた複数のブロックに対応し、例えば、復号対象ブロックとは空間的に異なる複数のブロック、及び、復号対象ブロックとは時間的に異なる1つのブロックを含む。
そして、復号装置は、復号対象ブロックの予測動きベクトルインデックスを用いて、複数の候補動きベクトルの中から復号対象ブロックの予測動きベクトルを特定する。そして、復号装置は、復号対象ブロックの予測動きベクトルと、復号対象ブロックの差分動きベクトルとを加算することにより、復号対象ブロックの動きベクトルを導出する。これにより、符号化装置と復号装置とは、同じ動きベクトルを用いることができる。
符号化装置及び復号装置は、予測動きベクトル指定モードと呼ばれる動作モードにおいて、上記のような差分動きベクトルを用いる動作を行ってもよい。
また、符号化装置は、符号化対象ブロックの予測動きベクトルを符号化対象ブロックの動きベクトルとして用いて予測画像を生成してもよい。同様に、復号装置は、復号対象ブロックの予測動きベクトルを復号対象ブロックの動きベクトルとして用いて予測画像を生成してもよい。符号化装置及び復号装置は、マージモードと呼ばれる動作モードにおいて、このような動作を行ってもよい。
また、例えば、符号化装置は、複数の候補動きベクトルの中から予測動きベクトルを選択する際、複数の候補動きベクトルのそれぞれを評価し、複数の候補動きベクトルのうち最も高く評価された候補動きベクトルを予測動きベクトルとして選択してもよい。その際、符号化装置は、符号化対象ブロックとは異なる2つの領域であり、少なくとも一方が評価対象の候補動きベクトルに従って定められる2つの領域である2つの評価対象領域の適合度合いが高いほど、評価対象の候補動きベクトルをより高く評価する。
この場合、復号装置も、複数の候補動きベクトルの中から予測動きベクトルを選択する際、複数の候補動きベクトルのそれぞれを評価し、複数の候補動きベクトルのうち最も高く評価された候補動きベクトルを予測動きベクトルとして選択する。その際、復号装置は、復号対象ブロックとは異なる2つの領域であり、少なくとも一方が評価対象の候補動きベクトルに従って定められる2つの領域である2つの評価対象領域の適合度合いが高いほど、評価対象の候補動きベクトルをより高く評価する。
これにより、符号化装置と復号装置とは、同じ選択方法に従って、同じ予測動きベクトルを導出することができる。そして、符号化装置と復号装置とは、導出された予測動きベクトルを動きベクトルとして用いることにより、動きベクトルの符号化及び復号を伴わずに、同じ動きベクトルを用いることができる。このような技術は、FRUC(Frame Rate Up-Conversion)とも呼ばれる。
上記の各態様では、複数の候補動きベクトルの中から予測動きベクトルが選択される。この場合、複数の候補動きベクトルに適切な候補動きベクトルが含まれていなければ、適切な予測動きベクトルが導出されない。そして、適切な予測動きベクトルが導出されなければ、適切な予測処理が行われず、符号化効率が低下し、符号量が多くなる。そして、動画像の伝送遅延がより大きくなり、動画像の記憶容量もより大きくなる。その結果、資源及びエネルギー等の消費量が多くなる。
そこで、本開示の一態様に係る符号化装置は、動画像の情報を符号化する符号化装置であって、メモリと、前記メモリにアクセス可能な回路とを備え、前記メモリにアクセス可能な前記回路は、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記符号化対象ブロックの情報を符号化する。
これにより、符号化装置は、第1参照ピクチャリストにおける第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ピクチャリストにおける第2参照ブロックから候補動きベクトルを導出することができる。したがって、符号化装置は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。そして、これにより、符号化装置は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
例えば、前記回路は、前記第1参照ブロックが双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックが双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置は、第1参照ブロックの1つの動きベクトルと、第2参照ブロックの1つの動きベクトルとのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、符号化装置は、特性が異なる2つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される2組の候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記第1参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置は、特性が類似すると想定される2つの動きベクトルのうち1つの動きベクトルのみから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。したがって、符号化装置は、処理効率を改善することができる。
また、例えば、前記回路は、前記第1参照ブロックが双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出し、前記第2参照ブロックが双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出してもよい。
これにより、符号化装置は、2つの参照ブロックの4つの動きベクトルのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、符号化装置は、2つの参照ブロックの4つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される4組の候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記第1参照ブロックが双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第1参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第2参照ブロックが双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第2参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。
これにより、符号化装置は、2つの参照ブロックの4つの動きベクトルからそれぞれ4つの候補動きベクトルを導出することができ、4つの候補動きベクトルで構成される2組の候補動きベクトルセットを導出することができる。すなわち、符号化装置は、2つの参照ブロックの4つの動きベクトルを2組の候補動きベクトルセットに含まれる4つの候補動きベクトルにそれぞれ適切に反映させることができる。
また、例えば、前記回路は、前記第1参照ブロックが単予測で符号化されている場合、前記第1参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックが単予測で符号化されている場合、前記第2参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置は、各参照ブロックの1つのみの動きベクトルから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、符号化装置は、各参照ブロックの1つのみの動きベクトルから、双予測に利用可能な2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記符号化対象ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化される場合、前記第1参照ブロックの1つ以上の動きベクトルから、前記符号化対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出し、前記第2参照ブロックの1つ以上の動きベクトルから、前記符号化対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出してもよい。
これにより、符号化装置は、符号化対象ブロックに一方向のみの双予測が用いられる場合、各参照ブロックから、一方向を参照する2つ以上の候補動きベクトルを導出することができる。したがって、符号化装置は、各参照ブロックから、一方向のみの双予測に適切な1組以上の候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記第1参照ピクチャリストが表示順で前方向を参照するための参照ピクチャリストであり、前記第2参照ピクチャリストが表示順で後方向を参照するための参照ピクチャリストであり、前記第1参照ブロックが表示順で前方向及び後方向の両方向の双予測で符号化されており、前記第2参照ブロックが表示順で前方向及び後方向の両方向の双予測で符号化されており、前記符号化対象ブロックが表示順で前方向及び後方向の両方向の双予測で符号化される場合、前記第1参照ブロックの2つの動きベクトルのうち表示順で後方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックの2つの動きベクトルのうち表示順で前方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置は、各参照ブロックの2つの動きベクトルのうち、時間的に参照ブロックから符号化対象ブロックへ向かう参照方向の動きベクトルから、2つの参照ピクチャリストを参照する候補動きベクトルセットを導出することができる。すなわち、符号化装置は、各参照ブロックの2つの動きベクトルのうち、符号化対象ブロックに対して時間的に関連が強い動きベクトルから、双予測に利用可能な候補動きベクトルセットを適切に導出することができる。
また、本開示の一態様に係る復号装置は、動画像の情報を復号する復号装置であって、メモリと、前記メモリにアクセス可能な回路とを備え、前記メモリにアクセス可能な前記回路は、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記復号対象ブロックの情報を復号する。
これにより、復号装置は、第1参照ピクチャリストにおける第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ピクチャリストにおける第2参照ブロックから候補動きベクトルを導出することができる。したがって、復号装置は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。そして、これにより、復号装置は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
例えば、前記回路は、前記第1参照ブロックが双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックが双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置は、第1参照ブロックの1つの動きベクトルと、第2参照ブロックの1つの動きベクトルとのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、復号装置は、特性が異なる2つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される2組の候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記第1参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置は、特性が類似すると想定される2つの動きベクトルのうち1つの動きベクトルのみから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。したがって、復号装置は、処理効率を改善することができる。
また、例えば、前記回路は、前記第1参照ブロックが双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出し、前記第2参照ブロックが双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出してもよい。
これにより、復号装置は、2つの参照ブロックの4つの動きベクトルのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、復号装置は、2つの参照ブロックの4つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される4組の候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記第1参照ブロックが双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第1参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第2参照ブロックが双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第2参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。
これにより、復号装置は、2つの参照ブロックの4つの動きベクトルからそれぞれ4つの候補動きベクトルを導出することができ、4つの候補動きベクトルで構成される2組の候補動きベクトルセットを導出することができる。すなわち、復号装置は、2つの参照ブロックの4つの動きベクトルを2組の候補動きベクトルセットに含まれる4つの候補動きベクトルにそれぞれ適切に反映させることができる。
また、例えば、前記回路は、前記第1参照ブロックが単予測で復号されている場合、前記第1参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックが単予測で復号されている場合、前記第2参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置は、各参照ブロックの1つのみの動きベクトルから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、復号装置は、各参照ブロックの1つのみの動きベクトルから、双予測に利用可能な2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記復号対象ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号される場合、前記第1参照ブロックの1つ以上の動きベクトルから、前記復号対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出し、前記第2参照ブロックの1つ以上の動きベクトルから、前記復号対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出してもよい。
これにより、復号装置は、復号対象ブロックに一方向のみの双予測が用いられる場合、各参照ブロックから、一方向を参照する2つ以上の候補動きベクトルを導出することができる。したがって、復号装置は、各参照ブロックから、一方向のみの双予測に適切な1組以上の候補動きベクトルセットを導出することができる。
また、例えば、前記回路は、前記第1参照ピクチャリストが表示順で前方向を参照するための参照ピクチャリストであり、前記第2参照ピクチャリストが表示順で後方向を参照するための参照ピクチャリストであり、前記第1参照ブロックが表示順で前方向及び後方向の両方向の双予測で復号されており、前記第2参照ブロックが表示順で前方向及び後方向の両方向の双予測で復号されており、前記復号対象ブロックが表示順で前方向及び後方向の両方向の双予測で復号される場合、前記第1参照ブロックの2つの動きベクトルのうち表示順で後方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、前記第2参照ブロックの2つの動きベクトルのうち表示順で前方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置は、各参照ブロックの2つの動きベクトルのうち、時間的に参照ブロックから復号対象ブロックへ向かう参照方向の動きベクトルから、2つの参照ピクチャリストを参照する候補動きベクトルセットを導出することができる。すなわち、復号装置は、各参照ブロックの2つの動きベクトルのうち、復号対象ブロックに対して時間的に関連が強い動きベクトルから、双予測に利用可能な候補動きベクトルセットを適切に導出することができる。
また、本開示の一態様に係る符号化方法は、動画像の情報を符号化する符号化方法であって、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記符号化対象ブロックの情報を符号化する。
これにより、この符号化方法を用いる装置等は、第1参照ピクチャリストにおける第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ピクチャリストにおける第2参照ブロックから候補動きベクトルを導出することができる。したがって、この符号化方法を用いる装置等は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。
そして、これにより、この符号化方法を用いる装置等は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
また、本開示の一態様に係る復号方法は、動画像の情報を復号する復号方法であって、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記復号対象ブロックの情報を復号する。
これにより、この復号方法を用いる装置等は、第1参照ピクチャリストにおける第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ピクチャリストにおける第2参照ブロックから候補動きベクトルを導出することができる。したがって、この復号方法を用いる装置等は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。
そして、これにより、この復号方法を用いる装置等は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
さらに、これらの包括的又は具体的な態様は、システム、装置、方法、集積回路、コンピュータプログラム、又は、コンピュータ読み取り可能なCD-ROMなどの非一時的な記録媒体で実現されてもよく、システム、装置、方法、集積回路、コンピュータプログラム、及び、記録媒体の任意な組み合わせで実現されてもよい。
以下、実施の形態について図面を参照しながら具体的に説明する。
なお、以下で説明する実施の形態は、いずれも包括的または具体的な例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、請求の範囲を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
(実施の形態1)
まず、後述する本開示の各態様で説明する処理および/または構成を適用可能な符号化装置および復号化装置の一例として、実施の形態1の概要を説明する。ただし、実施の形態1は、本開示の各態様で説明する処理および/または構成を適用可能な符号化装置および復号化装置の一例にすぎず、本開示の各態様で説明する処理および/または構成は、実施の形態1とは異なる符号化装置および復号化装置においても実施可能である。
まず、後述する本開示の各態様で説明する処理および/または構成を適用可能な符号化装置および復号化装置の一例として、実施の形態1の概要を説明する。ただし、実施の形態1は、本開示の各態様で説明する処理および/または構成を適用可能な符号化装置および復号化装置の一例にすぎず、本開示の各態様で説明する処理および/または構成は、実施の形態1とは異なる符号化装置および復号化装置においても実施可能である。
実施の形態1に対して本開示の各態様で説明する処理および/または構成を適用する場合、例えば以下のいずれかを行ってもよい。
(1)実施の形態1の符号化装置または復号化装置に対して、当該符号化装置または復号化装置を構成する複数の構成要素のうち、本開示の各態様で説明する構成要素に対応する構成要素を、本開示の各態様で説明する構成要素に置き換えること
(2)実施の形態1の符号化装置または復号化装置に対して、当該符号化装置または復号化装置を構成する複数の構成要素のうち一部の構成要素について機能または実施する処理の追加、置き換え、削除などの任意の変更を施した上で、本開示の各態様で説明する構成要素に対応する構成要素を、本開示の各態様で説明する構成要素に置き換えること
(3)実施の形態1の符号化装置または復号化装置が実施する方法に対して、処理の追加、および/または当該方法に含まれる複数の処理のうちの一部の処理について置き換え、削除などの任意の変更を施した上で、本開示の各態様で説明する処理に対応する処理を、本開示の各態様で説明する処理に置き換えること
(4)実施の形態1の符号化装置または復号化装置を構成する複数の構成要素のうちの一部の構成要素を、本開示の各態様で説明する構成要素、本開示の各態様で説明する構成要素が備える機能の一部を備える構成要素、または本開示の各態様で説明する構成要素が実施する処理の一部を実施する構成要素と組み合わせて実施すること
(5)実施の形態1の符号化装置または復号化装置を構成する複数の構成要素のうちの一部の構成要素が備える機能の一部を備える構成要素、または実施の形態1の符号化装置または復号化装置を構成する複数の構成要素のうちの一部の構成要素が実施する処理の一部を実施する構成要素を、本開示の各態様で説明する構成要素、本開示の各態様で説明する構成要素が備える機能の一部を備える構成要素、または本開示の各態様で説明する構成要素が実施する処理の一部を実施する構成要素と組み合わせて実施すること
(6)実施の形態1の符号化装置または復号化装置が実施する方法に対して、当該方法に含まれる複数の処理のうち、本開示の各態様で説明する処理に対応する処理を、本開示の各態様で説明する処理に置き換えること
(7)実施の形態1の符号化装置または復号化装置が実施する方法に含まれる複数の処理のうちの一部の処理を、本開示の各態様で説明する処理と組み合わせて実施すること
(2)実施の形態1の符号化装置または復号化装置に対して、当該符号化装置または復号化装置を構成する複数の構成要素のうち一部の構成要素について機能または実施する処理の追加、置き換え、削除などの任意の変更を施した上で、本開示の各態様で説明する構成要素に対応する構成要素を、本開示の各態様で説明する構成要素に置き換えること
(3)実施の形態1の符号化装置または復号化装置が実施する方法に対して、処理の追加、および/または当該方法に含まれる複数の処理のうちの一部の処理について置き換え、削除などの任意の変更を施した上で、本開示の各態様で説明する処理に対応する処理を、本開示の各態様で説明する処理に置き換えること
(4)実施の形態1の符号化装置または復号化装置を構成する複数の構成要素のうちの一部の構成要素を、本開示の各態様で説明する構成要素、本開示の各態様で説明する構成要素が備える機能の一部を備える構成要素、または本開示の各態様で説明する構成要素が実施する処理の一部を実施する構成要素と組み合わせて実施すること
(5)実施の形態1の符号化装置または復号化装置を構成する複数の構成要素のうちの一部の構成要素が備える機能の一部を備える構成要素、または実施の形態1の符号化装置または復号化装置を構成する複数の構成要素のうちの一部の構成要素が実施する処理の一部を実施する構成要素を、本開示の各態様で説明する構成要素、本開示の各態様で説明する構成要素が備える機能の一部を備える構成要素、または本開示の各態様で説明する構成要素が実施する処理の一部を実施する構成要素と組み合わせて実施すること
(6)実施の形態1の符号化装置または復号化装置が実施する方法に対して、当該方法に含まれる複数の処理のうち、本開示の各態様で説明する処理に対応する処理を、本開示の各態様で説明する処理に置き換えること
(7)実施の形態1の符号化装置または復号化装置が実施する方法に含まれる複数の処理のうちの一部の処理を、本開示の各態様で説明する処理と組み合わせて実施すること
なお、本開示の各態様で説明する処理および/または構成の実施の仕方は、上記の例に限定されるものではない。例えば、実施の形態1において開示する動画像/画像符号化装置または動画像/画像復号化装置とは異なる目的で利用される装置において実施されてもよいし、各態様において説明した処理および/または構成を単独で実施してもよい。また、異なる態様において説明した処理および/または構成を組み合わせて実施してもよい。
[符号化装置の概要]
まず、実施の形態1に係る符号化装置の概要を説明する。図1は、実施の形態1に係る符号化装置100の機能構成を示すブロック図である。符号化装置100は、動画像/画像をブロック単位で符号化する動画像/画像符号化装置である。
まず、実施の形態1に係る符号化装置の概要を説明する。図1は、実施の形態1に係る符号化装置100の機能構成を示すブロック図である。符号化装置100は、動画像/画像をブロック単位で符号化する動画像/画像符号化装置である。
図1に示すように、符号化装置100は、画像をブロック単位で符号化する装置であって、分割部102と、減算部104と、変換部106と、量子化部108と、エントロピー符号化部110と、逆量子化部112と、逆変換部114と、加算部116と、ブロックメモリ118と、ループフィルタ部120と、フレームメモリ122と、イントラ予測部124と、インター予測部126と、予測制御部128と、を備える。
符号化装置100は、例えば、汎用プロセッサ及びメモリにより実現される。この場合、メモリに格納されたソフトウェアプログラムがプロセッサにより実行されたときに、プロセッサは、分割部102、減算部104、変換部106、量子化部108、エントロピー符号化部110、逆量子化部112、逆変換部114、加算部116、ループフィルタ部120、イントラ予測部124、インター予測部126及び予測制御部128として機能する。また、符号化装置100は、分割部102、減算部104、変換部106、量子化部108、エントロピー符号化部110、逆量子化部112、逆変換部114、加算部116、ループフィルタ部120、イントラ予測部124、インター予測部126及び予測制御部128に対応する専用の1以上の電子回路として実現されてもよい。
以下に、符号化装置100に含まれる各構成要素について説明する。
[分割部]
分割部102は、入力動画像に含まれる各ピクチャを複数のブロックに分割し、各ブロックを減算部104に出力する。例えば、分割部102は、まず、ピクチャを固定サイズ(例えば128x128)のブロックに分割する。この固定サイズのブロックは、符号化ツリーユニット(CTU)と呼ばれることがある。そして、分割部102は、再帰的な四分木(quadtree)及び/又は二分木(binary tree)ブロック分割に基づいて、固定サイズのブロックの各々を可変サイズ(例えば64x64以下)のブロックに分割する。この可変サイズのブロックは、符号化ユニット(CU)、予測ユニット(PU)あるいは変換ユニット(TU)と呼ばれることがある。なお、本実施の形態では、CU、PU及びTUは区別される必要はなく、ピクチャ内の一部又はすべてのブロックがCU、PU、TUの処理単位となってもよい。
分割部102は、入力動画像に含まれる各ピクチャを複数のブロックに分割し、各ブロックを減算部104に出力する。例えば、分割部102は、まず、ピクチャを固定サイズ(例えば128x128)のブロックに分割する。この固定サイズのブロックは、符号化ツリーユニット(CTU)と呼ばれることがある。そして、分割部102は、再帰的な四分木(quadtree)及び/又は二分木(binary tree)ブロック分割に基づいて、固定サイズのブロックの各々を可変サイズ(例えば64x64以下)のブロックに分割する。この可変サイズのブロックは、符号化ユニット(CU)、予測ユニット(PU)あるいは変換ユニット(TU)と呼ばれることがある。なお、本実施の形態では、CU、PU及びTUは区別される必要はなく、ピクチャ内の一部又はすべてのブロックがCU、PU、TUの処理単位となってもよい。
図2は、実施の形態1におけるブロック分割の一例を示す図である。図2において、実線は四分木ブロック分割によるブロック境界を表し、破線は二分木ブロック分割によるブロック境界を表す。
ここでは、ブロック10は、128x128画素の正方形ブロック(128x128ブロック)である。この128x128ブロック10は、まず、4つの正方形の64x64ブロックに分割される(四分木ブロック分割)。
左上の64x64ブロックは、さらに2つの矩形の32x64ブロックに垂直に分割され、左の32x64ブロックはさらに2つの矩形の16x64ブロックに垂直に分割される(二分木ブロック分割)。その結果、左上の64x64ブロックは、2つの16x64ブロック11、12と、32x64ブロック13とに分割される。
右上の64x64ブロックは、2つの矩形の64x32ブロック14、15に水平に分割される(二分木ブロック分割)。
左下の64x64ブロックは、4つの正方形の32x32ブロックに分割される(四分木ブロック分割)。4つの32x32ブロックのうち左上のブロック及び右下のブロックはさらに分割される。左上の32x32ブロックは、2つの矩形の16x32ブロックに垂直に分割され、右の16x32ブロックはさらに2つの16x16ブロックに水平に分割される(二分木ブロック分割)。右下の32x32ブロックは、2つの32x16ブロックに水平に分割される(二分木ブロック分割)。その結果、左下の64x64ブロックは、16x32ブロック16と、2つの16x16ブロック17、18と、2つの32x32ブロック19、20と、2つの32x16ブロック21、22とに分割される。
右下の64x64ブロック23は分割されない。
以上のように、図2では、ブロック10は、再帰的な四分木及び二分木ブロック分割に基づいて、13個の可変サイズのブロック11~23に分割される。このような分割は、QTBT(quad-tree plus binary tree)分割と呼ばれることがある。
なお、図2では、1つのブロックが4つ又は2つのブロックに分割されていたが(四分木又は二分木ブロック分割)、分割はこれに限定されない。例えば、1つのブロックが3つのブロックに分割されてもよい(三分木ブロック分割)。このような三分木ブロック分割を含む分割は、MBT(multi type tree)分割と呼ばれることがある。
[減算部]
減算部104は、分割部102によって分割されたブロック単位で原信号(原サンプル)から予測信号(予測サンプル)を減算する。つまり、減算部104は、符号化対象ブロック(以下、カレントブロックという)の予測誤差(残差ともいう)を算出する。そして、減算部104は、算出された予測誤差を変換部106に出力する。
減算部104は、分割部102によって分割されたブロック単位で原信号(原サンプル)から予測信号(予測サンプル)を減算する。つまり、減算部104は、符号化対象ブロック(以下、カレントブロックという)の予測誤差(残差ともいう)を算出する。そして、減算部104は、算出された予測誤差を変換部106に出力する。
原信号は、符号化装置100の入力信号であり、動画像を構成する各ピクチャの画像を表す信号(例えば輝度(luma)信号及び2つの色差(chroma)信号)である。以下において、画像を表す信号をサンプルともいうこともある。
[変換部]
変換部106は、空間領域の予測誤差を周波数領域の変換係数に変換し、変換係数を量子化部108に出力する。具体的には、変換部106は、例えば空間領域の予測誤差に対して予め定められた離散コサイン変換(DCT)又は離散サイン変換(DST)を行う。
変換部106は、空間領域の予測誤差を周波数領域の変換係数に変換し、変換係数を量子化部108に出力する。具体的には、変換部106は、例えば空間領域の予測誤差に対して予め定められた離散コサイン変換(DCT)又は離散サイン変換(DST)を行う。
なお、変換部106は、複数の変換タイプの中から適応的に変換タイプを選択し、選択された変換タイプに対応する変換基底関数(transform basis function)を用いて、予測誤差を変換係数に変換してもよい。このような変換は、EMT(explicit multiple core transform)又はAMT(adaptive multiple transform)と呼ばれることがある。
複数の変換タイプは、例えば、DCT-II、DCT-V、DCT-VIII、DST-I及びDST-VIIを含む。図3は、各変換タイプに対応する変換基底関数を示す表である。図3においてNは入力画素の数を示す。これらの複数の変換タイプの中からの変換タイプの選択は、例えば、予測の種類(イントラ予測及びインター予測)に依存してもよいし、イントラ予測モードに依存してもよい。
このようなEMT又はAMTを適用するか否かを示す情報(例えばAMTフラグと呼ばれる)及び選択された変換タイプを示す情報は、CUレベルで信号化される。なお、これらの情報の信号化は、CUレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、ピクチャレベル、スライスレベル、タイルレベル又はCTUレベル)であってもよい。
また、変換部106は、変換係数(変換結果)を再変換してもよい。このような再変換は、AST(adaptive secondary transform)又はNSST(non-separable secondary transform)と呼ばれることがある。例えば、変換部106は、イントラ予測誤差に対応する変換係数のブロックに含まれるサブブロック(例えば4x4サブブロック)ごとに再変換を行う。NSSTを適用するか否かを示す情報及びNSSTに用いられる変換行列に関する情報は、CUレベルで信号化される。なお、これらの情報の信号化は、CUレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、ピクチャレベル、スライスレベル、タイルレベル又はCTUレベル)であってもよい。
ここで、Separableな変換とは、入力の次元の数だけ方向ごとに分離して複数回変換を行う方式であり、Non-Separableな変換とは、入力が多次元であった際に2つ以上の次元をまとめて1次元とみなして、まとめて変換を行う方式である。
例えば、Non-Separableな変換の1例として、入力が4×4のブロックであった場合にはそれを16個の要素を持ったひとつの配列とみなし、その配列に対して16×16の変換行列で変換処理を行うようなものが挙げられる。
また、同様に4×4の入力ブロックを16個の要素を持ったひとつの配列とみなした後に、その配列に対してGivens回転を複数回行うようなもの(Hypercube Givens Transform)もNon-Separableな変換の例である。
[量子化部]
量子化部108は、変換部106から出力された変換係数を量子化する。具体的には、量子化部108は、カレントブロックの変換係数を所定の走査順序で走査し、走査された変換係数に対応する量子化パラメータ(QP)に基づいて当該変換係数を量子化する。そして、量子化部108は、カレントブロックの量子化された変換係数(以下、量子化係数という)をエントロピー符号化部110及び逆量子化部112に出力する。
量子化部108は、変換部106から出力された変換係数を量子化する。具体的には、量子化部108は、カレントブロックの変換係数を所定の走査順序で走査し、走査された変換係数に対応する量子化パラメータ(QP)に基づいて当該変換係数を量子化する。そして、量子化部108は、カレントブロックの量子化された変換係数(以下、量子化係数という)をエントロピー符号化部110及び逆量子化部112に出力する。
所定の順序は、変換係数の量子化/逆量子化のための順序である。例えば、所定の走査順序は、周波数の昇順(低周波から高周波の順)又は降順(高周波から低周波の順)で定義される。
量子化パラメータとは、量子化ステップ(量子化幅)を定義するパラメータである。例えば、量子化パラメータの値が増加すれば量子化ステップも増加する。つまり、量子化パラメータの値が増加すれば量子化誤差が増大する。
[エントロピー符号化部]
エントロピー符号化部110は、量子化部108から入力である量子化係数を可変長符号化することにより符号化信号(符号化ビットストリーム)を生成する。具体的には、エントロピー符号化部110は、例えば、量子化係数を二値化し、二値信号を算術符号化する。
エントロピー符号化部110は、量子化部108から入力である量子化係数を可変長符号化することにより符号化信号(符号化ビットストリーム)を生成する。具体的には、エントロピー符号化部110は、例えば、量子化係数を二値化し、二値信号を算術符号化する。
[逆量子化部]
逆量子化部112は、量子化部108からの入力である量子化係数を逆量子化する。具体的には、逆量子化部112は、カレントブロックの量子化係数を所定の走査順序で逆量子化する。そして、逆量子化部112は、カレントブロックの逆量子化された変換係数を逆変換部114に出力する。
逆量子化部112は、量子化部108からの入力である量子化係数を逆量子化する。具体的には、逆量子化部112は、カレントブロックの量子化係数を所定の走査順序で逆量子化する。そして、逆量子化部112は、カレントブロックの逆量子化された変換係数を逆変換部114に出力する。
[逆変換部]
逆変換部114は、逆量子化部112からの入力である変換係数を逆変換することにより予測誤差を復元する。具体的には、逆変換部114は、変換係数に対して、変換部106による変換に対応する逆変換を行うことにより、カレントブロックの予測誤差を復元する。そして、逆変換部114は、復元された予測誤差を加算部116に出力する。
逆変換部114は、逆量子化部112からの入力である変換係数を逆変換することにより予測誤差を復元する。具体的には、逆変換部114は、変換係数に対して、変換部106による変換に対応する逆変換を行うことにより、カレントブロックの予測誤差を復元する。そして、逆変換部114は、復元された予測誤差を加算部116に出力する。
なお、復元された予測誤差は、量子化により情報が失われているので、減算部104が算出した予測誤差と一致しない。すなわち、復元された予測誤差には、量子化誤差が含まれている。
[加算部]
加算部116は、逆変換部114からの入力である予測誤差と予測制御部128からの入力である予測サンプルとを加算することによりカレントブロックを再構成する。そして、加算部116は、再構成されたブロックをブロックメモリ118及びループフィルタ部120に出力する。再構成ブロックは、ローカル復号ブロックと呼ばれることもある。
加算部116は、逆変換部114からの入力である予測誤差と予測制御部128からの入力である予測サンプルとを加算することによりカレントブロックを再構成する。そして、加算部116は、再構成されたブロックをブロックメモリ118及びループフィルタ部120に出力する。再構成ブロックは、ローカル復号ブロックと呼ばれることもある。
[ブロックメモリ]
ブロックメモリ118は、イントラ予測で参照されるブロックであって符号化対象ピクチャ(以下、カレントピクチャという)内のブロックを格納するための記憶部である。具体的には、ブロックメモリ118は、加算部116から出力された再構成ブロックを格納する。
ブロックメモリ118は、イントラ予測で参照されるブロックであって符号化対象ピクチャ(以下、カレントピクチャという)内のブロックを格納するための記憶部である。具体的には、ブロックメモリ118は、加算部116から出力された再構成ブロックを格納する。
[ループフィルタ部]
ループフィルタ部120は、加算部116によって再構成されたブロックにループフィルタを施し、フィルタされた再構成ブロックをフレームメモリ122に出力する。ループフィルタとは、符号化ループ内で用いられるフィルタ(インループフィルタ)であり、例えば、デブロッキング・フィルタ(DF)、サンプルアダプティブオフセット(SAO)及びアダプティブループフィルタ(ALF)などを含む。
ループフィルタ部120は、加算部116によって再構成されたブロックにループフィルタを施し、フィルタされた再構成ブロックをフレームメモリ122に出力する。ループフィルタとは、符号化ループ内で用いられるフィルタ(インループフィルタ)であり、例えば、デブロッキング・フィルタ(DF)、サンプルアダプティブオフセット(SAO)及びアダプティブループフィルタ(ALF)などを含む。
ALFでは、符号化歪みを除去するための最小二乗誤差フィルタが適用され、例えばカレントブロック内の2x2サブブロックごとに、局所的な勾配(gradient)の方向及び活性度(activity)に基づいて複数のフィルタの中から選択された1つのフィルタが適用される。
具体的には、まず、サブブロック(例えば2x2サブブロック)が複数のクラス(例えば15又は25クラス)に分類される。サブブロックの分類は、勾配の方向及び活性度に基づいて行われる。例えば、勾配の方向値D(例えば0~2又は0~4)と勾配の活性値A(例えば0~4)とを用いて分類値C(例えばC=5D+A)が算出される。そして、分類値Cに基づいて、サブブロックが複数のクラス(例えば15又は25クラス)に分類される。
勾配の方向値Dは、例えば、複数の方向(例えば水平、垂直及び2つの対角方向)の勾配を比較することにより導出される。また、勾配の活性値Aは、例えば、複数の方向の勾配を加算し、加算結果を量子化することにより導出される。
このような分類の結果に基づいて、複数のフィルタの中からサブブロックのためのフィルタが決定される。
ALFで用いられるフィルタの形状としては例えば円対称形状が利用される。図4A~図4Cは、ALFで用いられるフィルタの形状の複数の例を示す図である。図4Aは、5x5ダイヤモンド形状フィルタを示し、図4Bは、7x7ダイヤモンド形状フィルタを示し、図4Cは、9x9ダイヤモンド形状フィルタを示す。フィルタの形状を示す情報は、ピクチャレベルで信号化される。なお、フィルタの形状を示す情報の信号化は、ピクチャレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、スライスレベル、タイルレベル、CTUレベル又はCUレベル)であってもよい。
ALFのオン/オフは、例えば、ピクチャレベル又はCUレベルで決定される。例えば、輝度についてはCUレベルでALFを適用するか否かが決定され、色差についてはピクチャレベルでALFを適用するか否かが決定される。ALFのオン/オフを示す情報は、ピクチャレベル又はCUレベルで信号化される。なお、ALFのオン/オフを示す情報の信号化は、ピクチャレベル又はCUレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、スライスレベル、タイルレベル又はCTUレベル)であってもよい。
選択可能な複数のフィルタ(例えば15又は25までのフィルタ)の係数セットは、ピクチャレベルで信号化される。なお、係数セットの信号化は、ピクチャレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、スライスレベル、タイルレベル、CTUレベル、CUレベル又はサブブロックレベル)であってもよい。
[フレームメモリ]
フレームメモリ122は、インター予測に用いられる参照ピクチャを格納するための記憶部であり、フレームバッファと呼ばれることもある。具体的には、フレームメモリ122は、ループフィルタ部120によってフィルタされた再構成ブロックを格納する。
フレームメモリ122は、インター予測に用いられる参照ピクチャを格納するための記憶部であり、フレームバッファと呼ばれることもある。具体的には、フレームメモリ122は、ループフィルタ部120によってフィルタされた再構成ブロックを格納する。
[イントラ予測部]
イントラ予測部124は、ブロックメモリ118に格納されたカレントピクチャ内のブロックを参照してカレントブロックのイントラ予測(画面内予測ともいう)を行うことで、予測信号(イントラ予測信号)を生成する。具体的には、イントラ予測部124は、カレントブロックに隣接するブロックのサンプル(例えば輝度値、色差値)を参照してイントラ予測を行うことでイントラ予測信号を生成し、イントラ予測信号を予測制御部128に出力する。
イントラ予測部124は、ブロックメモリ118に格納されたカレントピクチャ内のブロックを参照してカレントブロックのイントラ予測(画面内予測ともいう)を行うことで、予測信号(イントラ予測信号)を生成する。具体的には、イントラ予測部124は、カレントブロックに隣接するブロックのサンプル(例えば輝度値、色差値)を参照してイントラ予測を行うことでイントラ予測信号を生成し、イントラ予測信号を予測制御部128に出力する。
例えば、イントラ予測部124は、予め規定された複数のイントラ予測モードのうちの1つを用いてイントラ予測を行う。複数のイントラ予測モードは、1以上の非方向性予測モードと、複数の方向性予測モードと、を含む。
1以上の非方向性予測モードは、例えばH.265/HEVC(High-Efficiency Video Coding)規格(非特許文献1)で規定されたPlanar予測モード及びDC予測モードを含む。
複数の方向性予測モードは、例えばH.265/HEVC規格で規定された33方向の予測モードを含む。なお、複数の方向性予測モードは、33方向に加えてさらに32方向の予測モード(合計で65個の方向性予測モード)を含んでもよい。図5Aは、イントラ予測における67個のイントラ予測モード(2個の非方向性予測モード及び65個の方向性予測モード)を示す図である。実線矢印は、H.265/HEVC規格で規定された33方向を表し、破線矢印は、追加された32方向を表す。
なお、色差ブロックのイントラ予測において、輝度ブロックが参照されてもよい。つまり、カレントブロックの輝度成分に基づいて、カレントブロックの色差成分が予測されてもよい。このようなイントラ予測は、CCLM(cross-component linear model)予測と呼ばれることがある。このような輝度ブロックを参照する色差ブロックのイントラ予測モード(例えばCCLMモードと呼ばれる)は、色差ブロックのイントラ予測モードの1つとして加えられてもよい。
イントラ予測部124は、水平/垂直方向の参照画素の勾配に基づいてイントラ予測後の画素値を補正してもよい。このような補正をともなうイントラ予測は、PDPC(position dependent intra prediction combination)と呼ばれることがある。PDPCの適用の有無を示す情報(例えばPDPCフラグと呼ばれる)は、例えばCUレベルで信号化される。なお、この情報の信号化は、CUレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、ピクチャレベル、スライスレベル、タイルレベル又はCTUレベル)であってもよい。
[インター予測部]
インター予測部126は、フレームメモリ122に格納された参照ピクチャであってカレントピクチャとは異なる参照ピクチャを参照してカレントブロックのインター予測(画面間予測ともいう)を行うことで、予測信号(インター予測信号)を生成する。インター予測は、カレントブロック又はカレントブロック内のサブブロック(例えば4x4ブロック)の単位で行われる。例えば、インター予測部126は、カレントブロック又はサブブロックについて参照ピクチャ内で動き探索(motion estimation)を行う。そして、インター予測部126は、動き探索により得られた動き情報(例えば動きベクトル)を用いて動き補償を行うことでカレントブロック又はサブブロックのインター予測信号を生成する。そして、インター予測部126は、生成されたインター予測信号を予測制御部128に出力する。
インター予測部126は、フレームメモリ122に格納された参照ピクチャであってカレントピクチャとは異なる参照ピクチャを参照してカレントブロックのインター予測(画面間予測ともいう)を行うことで、予測信号(インター予測信号)を生成する。インター予測は、カレントブロック又はカレントブロック内のサブブロック(例えば4x4ブロック)の単位で行われる。例えば、インター予測部126は、カレントブロック又はサブブロックについて参照ピクチャ内で動き探索(motion estimation)を行う。そして、インター予測部126は、動き探索により得られた動き情報(例えば動きベクトル)を用いて動き補償を行うことでカレントブロック又はサブブロックのインター予測信号を生成する。そして、インター予測部126は、生成されたインター予測信号を予測制御部128に出力する。
動き補償に用いられた動き情報は信号化される。動きベクトルの信号化には、予測動きベクトル(motion vector predictor)が用いられてもよい。つまり、動きベクトルと予測動きベクトルとの間の差分が信号化されてもよい。
なお、動き探索により得られたカレントブロックの動き情報だけでなく、隣接ブロックの動き情報も用いて、インター予測信号が生成されてもよい。具体的には、動き探索により得られた動き情報に基づく予測信号と、隣接ブロックの動き情報に基づく予測信号と、を重み付け加算することにより、カレントブロック内のサブブロック単位でインター予測信号が生成されてもよい。このようなインター予測(動き補償)は、OBMC(overlapped block motion compensation)と呼ばれることがある。
このようなOBMCモードでは、OBMCのためのサブブロックのサイズを示す情報(例えばOBMCブロックサイズと呼ばれる)は、シーケンスレベルで信号化される。また、OBMCモードを適用するか否かを示す情報(例えばOBMCフラグと呼ばれる)は、CUレベルで信号化される。なお、これらの情報の信号化のレベルは、シーケンスレベル及びCUレベルに限定される必要はなく、他のレベル(例えばピクチャレベル、スライスレベル、タイルレベル、CTUレベル又はサブブロックレベル)であってもよい。
OBMCモードについて、より具体的に説明する。図5B及び図5Cは、OBMC処理による予測画像補正処理の概要を説明するためのフローチャート及び概念図である。
まず、符号化対象ブロックに割り当てられた動きベクトル(MV)を用いて通常の動き補償による予測画像(Pred)を取得する。
次に、符号化済みの左隣接ブロックの動きベクトル(MV_L)を符号化対象ブロックに適用して予測画像(Pred_L)を取得し、前記予測画像とPred_Lとを重みを付けて重ね合わせることで予測画像の1回目の補正を行う。
同様に、符号化済みの上隣接ブロックの動きベクトル(MV_U)を符号化対象ブロックに適用して予測画像(Pred_U)を取得し、前記1回目の補正を行った予測画像とPred_Uとを重みを付けて重ね合わせることで予測画像の2回目の補正を行い、それを最終的な予測画像とする。
なお、ここでは左隣接ブロックと上隣接ブロックを用いた2段階の補正の方法を説明したが、右隣接ブロックや下隣接ブロックを用いて2段階よりも多い回数の補正を行う構成とすることも可能である。
なお、重ね合わせを行う領域はブロック全体の画素領域ではなく、ブロック境界近傍の一部の領域のみであってもよい。
なお、ここでは1枚の参照ピクチャからの予測画像補正処理について説明したが、複数枚の参照ピクチャから予測画像を補正する場合も同様であり、各々の参照ピクチャから補正した予測画像を取得した後に、得られた予測画像をさらに重ね合わせることで最終的な予測画像とする。
なお、前記処理対象ブロックは、予測ブロック単位であっても、予測ブロックをさらに分割したサブブロック単位であってもよい。
OBMC処理を適用するかどうかの判定の方法として、例えば、OBMC処理を適用するかどうかを示す信号であるobmc_flagを用いる方法がある。具体的な一例としては、符号化装置において、符号化対象ブロックが動きの複雑な領域に属しているかどうかを判定し、動きの複雑な領域に属している場合はobmc_flagとして値1を設定してOBMC処理を適用して符号化を行い、動きの複雑な領域に属していない場合はobmc_flagとして値0を設定してOBMC処理を適用せずに符号化を行う。一方、復号化装置では、ストリームに記述されたobmc_flagを復号化するとことで、その値に応じてOBMC処理を適用するかどうかを切替えて復号化を行う。
なお、動き情報は信号化されずに、復号装置側で導出されてもよい。例えば、H.265/HEVC規格で規定されたマージモードが用いられてもよい。また例えば、復号装置側で動き探索を行うことにより動き情報が導出されてもよい。この場合、カレントブロックの画素値を用いずに動き探索が行われる。
ここで、復号装置側で動き探索を行うモードについて説明する。この復号装置側で動き探索を行うモードは、PMMVD(pattern matched motion vector derivation)モード又はFRUC(frame rate up-conversion)モードと呼ばれることがある。
FRUC処理の一例を図5Dに示す。まず、カレントブロックに空間的又は時間的に隣接する符号化済みブロックの動きベクトルを参照して、各々が予測動きベクトルを有する複数の候補のリスト(マージリストと共通であってもよい)が生成される。次に、候補リストに登録されている複数の候補MVの中からベスト候補MVを選択する。例えば、候補リストに含まれる各候補の評価値が算出され、評価値に基づいて1つの候補が選択される。
そして、選択された候補の動きベクトルに基づいて、カレントブロックのための動きベクトルが導出される。具体的には、例えば、選択された候補の動きベクトル(ベスト候補MV)がそのままカレントブロックのための動きベクトルとして導出される。また例えば、選択された候補の動きベクトルに対応する参照ピクチャ内の位置の周辺領域において、パターンマッチングを行うことにより、カレントブロックのための動きベクトルが導出されてもよい。すなわち、ベスト候補MVの周辺の領域に対して同様の方法で探索を行い、さらに評価値が良い値となるMVがあった場合は、ベスト候補MVを前記MVに更新して、それをカレントブロックの最終的なMVとしてもよい。なお、当該処理を実施しない構成とすることも可能である。
サブブロック単位で処理を行う場合も全く同様の処理としてもよい。
なお、評価値は、動きベクトルに対応する参照ピクチャ内の領域と、所定の領域との間のパターンマッチングによって再構成画像の差分値を求めることにより算出される。なお、差分値に加えてそれ以外の情報を用いて評価値を算出してもよい。
パターンマッチングとしては、第1パターンマッチング又は第2パターンマッチングが用いられる。第1パターンマッチング及び第2パターンマッチングは、それぞれ、バイラテラルマッチング(bilateral matching)及びテンプレートマッチング(template matching)と呼ばれることがある。
第1パターンマッチングでは、異なる2つの参照ピクチャ内の2つのブロックであってカレントブロックの動き軌道(motion trajectory)に沿う2つのブロックの間でパターンマッチングが行われる。したがって、第1パターンマッチングでは、上述した候補の評価値の算出のための所定の領域として、カレントブロックの動き軌道に沿う他の参照ピクチャ内の領域が用いられる。
図6は、動き軌道に沿う2つのブロック間でのパターンマッチング(バイラテラルマッチング)の一例を説明するための図である。図6に示すように、第1パターンマッチングでは、カレントブロック(Cur block)の動き軌道に沿う2つのブロックであって異なる2つの参照ピクチャ(Ref0、Ref1)内の2つのブロックのペアの中で最もマッチするペアを探索することにより2つの動きベクトル(MV0、MV1)が導出される。具体的には、カレントブロックに対して、候補MVで指定された第1の符号化済み参照ピクチャ(Ref0)内の指定位置における再構成画像と、前記候補MVを表示時間間隔でスケーリングした対称MVで指定された第2の符号化済み参照ピクチャ(Ref1)内の指定位置における再構成画像との差分を導出し、得られた差分値を用いて評価値を算出する。複数の候補MVの中で最も評価値が良い値となる候補MVを最終MVとして選択するとよい。
連続的な動き軌道の仮定の下では、2つの参照ブロックを指し示す動きベクトル(MV0、MV1)は、カレントピクチャ(Cur Pic)と2つの参照ピクチャ(Ref0、Ref1)との間の時間的な距離(TD0、TD1)に対して比例する。例えば、カレントピクチャが時間的に2つの参照ピクチャの間に位置し、カレントピクチャから2つの参照ピクチャへの時間的な距離が等しい場合、第1パターンマッチングでは、鏡映対称な双方向の動きベクトルが導出される。
第2パターンマッチングでは、カレントピクチャ内のテンプレート(カレントピクチャ内でカレントブロックに隣接するブロック(例えば上及び/又は左隣接ブロック))と参照ピクチャ内のブロックとの間でパターンマッチングが行われる。したがって、第2パターンマッチングでは、上述した候補の評価値の算出のための所定の領域として、カレントピクチャ内のカレントブロックに隣接するブロックが用いられる。
図7は、カレントピクチャ内のテンプレートと参照ピクチャ内のブロックとの間でのパターンマッチング(テンプレートマッチング)の一例を説明するための図である。図7に示すように、第2パターンマッチングでは、カレントピクチャ(Cur Pic)内でカレントブロック(Cur block)に隣接するブロックと最もマッチするブロックを参照ピクチャ(Ref0)内で探索することによりカレントブロックの動きベクトルが導出される。具体的には、カレントブロックに対して、左隣接および上隣接の両方もしくはどちらか一方の符号化済み領域の再構成画像と、候補MVで指定された符号化済み参照ピクチャ(Ref0)内の同等位置における再構成画像との差分を導出し、得られた差分値を用いて評価値を算出し、複数の候補MVの中で最も評価値が良い値となる候補MVをベスト候補MVとして選択するとよい。
このようなFRUCモードを適用するか否かを示す情報(例えばFRUCフラグと呼ばれる)は、CUレベルで信号化される。また、FRUCモードが適用される場合(例えばFRUCフラグが真の場合)、パターンマッチングの方法(第1パターンマッチング又は第2パターンマッチング)を示す情報(例えばFRUCモードフラグと呼ばれる)がCUレベルで信号化される。なお、これらの情報の信号化は、CUレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、ピクチャレベル、スライスレベル、タイルレベル、CTUレベル又はサブブロックレベル)であってもよい。
ここで、等速直線運動を仮定したモデルに基づいて動きベクトルを導出するモードについて説明する。このモードは、BIO(bi-directional optical flow)モードと呼ばれることがある。
図8は、等速直線運動を仮定したモデルを説明するための図である。図8において、(vx,vy)は、速度ベクトルを示し、τ0、τ1は、それぞれ、カレントピクチャ(Cur Pic)と2つの参照ピクチャ(Ref0,Ref1)との間の時間的な距離を示す。(MVx0,MVy0)は、参照ピクチャRef0に対応する動きベクトルを示し、(MVx1、MVy1)は、参照ピクチャRef1に対応する動きベクトルを示す。
このとき速度ベクトル(vx,vy)の等速直線運動の仮定の下では、(MVx0,MVy0)及び(MVx1,MVy1)は、それぞれ、(vxτ0,vyτ0)及び(-vxτ1,-vyτ1)と表され、以下のオプティカルフロー等式(1)が成り立つ。
ここで、I(k)は、動き補償後の参照画像k(k=0,1)の輝度値を示す。このオプティカルフロー等式は、(i)輝度値の時間微分と、(ii)水平方向の速度及び参照画像の空間勾配の水平成分の積と、(iii)垂直方向の速度及び参照画像の空間勾配の垂直成分の積と、の和が、ゼロと等しいことを示す。このオプティカルフロー等式とエルミート補間(Hermite interpolation)との組み合わせに基づいて、マージリスト等から得られるブロック単位の動きベクトルが画素単位で補正される。
なお、等速直線運動を仮定したモデルに基づく動きベクトルの導出とは異なる方法で、復号装置側で動きベクトルが導出されてもよい。例えば、複数の隣接ブロックの動きベクトルに基づいてサブブロック単位で動きベクトルが導出されてもよい。
ここで、複数の隣接ブロックの動きベクトルに基づいてサブブロック単位で動きベクトルを導出するモードについて説明する。このモードは、アフィン動き補償予測(affine motion compensation prediction)モードと呼ばれることがある。
図9Aは、複数の隣接ブロックの動きベクトルに基づくサブブロック単位の動きベクトルの導出を説明するための図である。図9Aにおいて、カレントブロックは、16の4x4サブブロックを含む。ここでは、隣接ブロックの動きベクトルに基づいてカレントブロックの左上角制御ポイントの動きベクトルv0が導出され、隣接サブブロックの動きベクトルに基づいてカレントブロックの右上角制御ポイントの動きベクトルv1が導出される。そして、2つの動きベクトルv0及びv1を用いて、以下の式(2)により、カレントブロック内の各サブブロックの動きベクトル(vx,vy)が導出される。

ここで、x及びyは、それぞれ、サブブロックの水平位置及び垂直位置を示し、wは、予め定められた重み係数を示す。
このようなアフィン動き補償予測モードでは、左上及び右上角制御ポイントの動きベクトルの導出方法が異なるいくつかのモードを含んでもよい。このようなアフィン動き補償予測モードを示す情報(例えばアフィンフラグと呼ばれる)は、CUレベルで信号化される。なお、このアフィン動き補償予測モードを示す情報の信号化は、CUレベルに限定される必要はなく、他のレベル(例えば、シーケンスレベル、ピクチャレベル、スライスレベル、タイルレベル、CTUレベル又はサブブロックレベル)であってもよい。
[予測制御部]
予測制御部128は、イントラ予測信号及びインター予測信号のいずれかを選択し、選択した信号を予測信号として減算部104及び加算部116に出力する。
予測制御部128は、イントラ予測信号及びインター予測信号のいずれかを選択し、選択した信号を予測信号として減算部104及び加算部116に出力する。
ここで、マージモードにより符号化対象ピクチャの動きベクトルを導出する例を説明する。図9Bは、マージモードによる動きベクトル導出処理の概要を説明するための図である。
まず、予測MVの候補を登録した予測MVリストを生成する。予測MVの候補としては、符号化対象ブロックの空間的に周辺に位置する複数の符号化済みブロックが持つMVである空間隣接予測MV、符号化済み参照ピクチャにおける符号化対象ブロックの位置を投影した近辺のブロックが持つMVである時間隣接予測MV、空間隣接予測MVと時間隣接予測MVのMV値を組合わせて生成したMVである結合予測MV、および値がゼロのMVであるゼロ予測MV等がある。
次に、予測MVリストに登録されている複数の予測MVの中から1つの予測MVを選択することで、符号化対象ブロックのMVとして決定する。
さらに可変長符号化部では、どの予測MVを選択したかを示す信号であるmerge_idxをストリームに記述して符号化する。
なお、図9Bで説明した予測MVリストに登録する予測MVは一例であり、図中の個数とは異なる個数であったり、図中の予測MVの一部の種類を含まない構成であったり、図中の予測MVの種類以外の予測MVを追加した構成であったりしてもよい。
なお、マージモードにより導出した符号化対象ブロックのMVを用いて、後述するDMVR処理を行うことによって最終的なMVを決定してもよい。
ここで、DMVR処理を用いてMVを決定する例について説明する。
図9Cは、DMVR処理の概要を説明するための概念図である。
まず、処理対象ブロックに設定された最適MVPを候補MVとして、前記候補MVに従って、L0方向の処理済みピクチャである第1参照ピクチャ、およびL1方向の処理済みピクチャである第2参照ピクチャから参照画素をそれぞれ取得し、各参照画素の平均をとることでテンプレートを生成する。
次に、前記テンプレートを用いて、第1参照ピクチャおよび第2参照ピクチャの候補MVの周辺領域をそれぞれ探索し、最もコストが最小となるMVを最終的なMVとして決定する。なお、コスト値はテンプレートの各画素値と探索領域の各画素値との差分値およびMV値等を用いて算出する。
なお、符号化装置および復号化装置では、ここで説明した処理の概要は基本的に共通である。
なお、ここで説明した処理そのものでなくても、候補MVの周辺を探索して最終的なMVを導出することができる処理であれば、他の処理を用いてもよい。
ここで、LIC処理を用いて予測画像を生成するモードについて説明する。
図9Dは、LIC処理による輝度補正処理を用いた予測画像生成方法の概要を説明するための図である。
まず、符号化済みピクチャである参照ピクチャから符号化対象ブロックに対応する参照画像を取得するためのMVを導出する。
次に、符号化対象ブロックに対して、左隣接および上隣接の符号化済み周辺参照領域の輝度画素値と、MVで指定された参照ピクチャ内の同等位置における輝度画素値とを用いて、参照ピクチャと符号化対象ピクチャとで輝度値がどのように変化したかを示す情報を抽出して輝度補正パラメータを算出する。
MVで指定された参照ピクチャ内の参照画像に対して前記輝度補正パラメータを用いて輝度補正処理を行うことで、符号化対象ブロックに対する予測画像を生成する。
なお、図9Dにおける前記周辺参照領域の形状は一例であり、これ以外の形状を用いてもよい。
また、ここでは1枚の参照ピクチャから予測画像を生成する処理について説明したが、複数枚の参照ピクチャから予測画像を生成する場合も同様であり、各々の参照ピクチャから取得した参照画像に同様の方法で輝度補正処理を行ってから予測画像を生成する。
LIC処理を適用するかどうかの判定の方法として、例えば、LIC処理を適用するかどうかを示す信号であるlic_flagを用いる方法がある。具体的な一例としては、符号化装置において、符号化対象ブロックが輝度変化が発生している領域に属しているかどうかを判定し、輝度変化が発生している領域に属している場合はlic_flagとして値1を設定してLIC処理を適用して符号化を行い、輝度変化が発生している領域に属していない場合はlic_flagとして値0を設定してLIC処理を適用せずに符号化を行う。一方、復号化装置では、ストリームに記述されたlic_flagを復号化するとことで、その値に応じてLIC処理を適用するかどうかを切替えて復号化を行う。
LIC処理を適用するかどうかの判定の別の方法として、例えば、周辺ブロックでLIC処理を適用したかどうかに従って判定する方法もある。具体的な一例としては、符号化対象ブロックがマージモードであった場合、マージモード処理におけるMVの導出の際に選択した周辺の符号化済みブロックがLIC処理を適用して符号化したかどうかを判定し、その結果に応じてLIC処理を適用するかどうかを切替えて符号化を行う。なお、この例の場合、復号化における処理も全く同様となる。
[復号装置の概要]
次に、上記の符号化装置100から出力された符号化信号(符号化ビットストリーム)を復号可能な復号装置の概要について説明する。図10は、実施の形態1に係る復号装置200の機能構成を示すブロック図である。復号装置200は、動画像/画像をブロック単位で復号する動画像/画像復号装置である。
次に、上記の符号化装置100から出力された符号化信号(符号化ビットストリーム)を復号可能な復号装置の概要について説明する。図10は、実施の形態1に係る復号装置200の機能構成を示すブロック図である。復号装置200は、動画像/画像をブロック単位で復号する動画像/画像復号装置である。
図10に示すように、復号装置200は、エントロピー復号部202と、逆量子化部204と、逆変換部206と、加算部208と、ブロックメモリ210と、ループフィルタ部212と、フレームメモリ214と、イントラ予測部216と、インター予測部218と、予測制御部220と、を備える。
復号装置200は、例えば、汎用プロセッサ及びメモリにより実現される。この場合、メモリに格納されたソフトウェアプログラムがプロセッサにより実行されたときに、プロセッサは、エントロピー復号部202、逆量子化部204、逆変換部206、加算部208、ループフィルタ部212、イントラ予測部216、インター予測部218及び予測制御部220として機能する。また、復号装置200は、エントロピー復号部202、逆量子化部204、逆変換部206、加算部208、ループフィルタ部212、イントラ予測部216、インター予測部218及び予測制御部220に対応する専用の1以上の電子回路として実現されてもよい。
以下に、復号装置200に含まれる各構成要素について説明する。
[エントロピー復号部]
エントロピー復号部202は、符号化ビットストリームをエントロピー復号する。具体的には、エントロピー復号部202は、例えば、符号化ビットストリームから二値信号に算術復号する。そして、エントロピー復号部202は、二値信号を多値化(debinarize)する。これにより、エントロピー復号部202は、ブロック単位で量子化係数を逆量子化部204に出力する。
エントロピー復号部202は、符号化ビットストリームをエントロピー復号する。具体的には、エントロピー復号部202は、例えば、符号化ビットストリームから二値信号に算術復号する。そして、エントロピー復号部202は、二値信号を多値化(debinarize)する。これにより、エントロピー復号部202は、ブロック単位で量子化係数を逆量子化部204に出力する。
[逆量子化部]
逆量子化部204は、エントロピー復号部202からの入力である復号対象ブロック(以下、カレントブロックという)の量子化係数を逆量子化する。具体的には、逆量子化部204は、カレントブロックの量子化係数の各々について、当該量子化係数に対応する量子化パラメータに基づいて当該量子化係数を逆量子化する。そして、逆量子化部204は、カレントブロックの逆量子化された量子化係数(つまり変換係数)を逆変換部206に出力する。
逆量子化部204は、エントロピー復号部202からの入力である復号対象ブロック(以下、カレントブロックという)の量子化係数を逆量子化する。具体的には、逆量子化部204は、カレントブロックの量子化係数の各々について、当該量子化係数に対応する量子化パラメータに基づいて当該量子化係数を逆量子化する。そして、逆量子化部204は、カレントブロックの逆量子化された量子化係数(つまり変換係数)を逆変換部206に出力する。
[逆変換部]
逆変換部206は、逆量子化部204からの入力である変換係数を逆変換することにより予測誤差を復元する。
逆変換部206は、逆量子化部204からの入力である変換係数を逆変換することにより予測誤差を復元する。
例えば符号化ビットストリームから読み解かれた情報がEMT又はAMTを適用することを示す場合(例えばAMTフラグが真)、逆変換部206は、読み解かれた変換タイプを示す情報に基づいてカレントブロックの変換係数を逆変換する。
また例えば、符号化ビットストリームから読み解かれた情報がNSSTを適用することを示す場合、逆変換部206は、変換係数に逆再変換を適用する。
[加算部]
加算部208は、逆変換部206からの入力である予測誤差と予測制御部220からの入力である予測サンプルとを加算することによりカレントブロックを再構成する。そして、加算部208は、再構成されたブロックをブロックメモリ210及びループフィルタ部212に出力する。
加算部208は、逆変換部206からの入力である予測誤差と予測制御部220からの入力である予測サンプルとを加算することによりカレントブロックを再構成する。そして、加算部208は、再構成されたブロックをブロックメモリ210及びループフィルタ部212に出力する。
[ブロックメモリ]
ブロックメモリ210は、イントラ予測で参照されるブロックであって復号対象ピクチャ(以下、カレントピクチャという)内のブロックを格納するための記憶部である。具体的には、ブロックメモリ210は、加算部208から出力された再構成ブロックを格納する。
ブロックメモリ210は、イントラ予測で参照されるブロックであって復号対象ピクチャ(以下、カレントピクチャという)内のブロックを格納するための記憶部である。具体的には、ブロックメモリ210は、加算部208から出力された再構成ブロックを格納する。
[ループフィルタ部]
ループフィルタ部212は、加算部208によって再構成されたブロックにループフィルタを施し、フィルタされた再構成ブロックをフレームメモリ214及び表示装置等に出力する。
ループフィルタ部212は、加算部208によって再構成されたブロックにループフィルタを施し、フィルタされた再構成ブロックをフレームメモリ214及び表示装置等に出力する。
符号化ビットストリームから読み解かれたALFのオン/オフを示す情報がALFのオンを示す場合、局所的な勾配の方向及び活性度に基づいて複数のフィルタの中から1つのフィルタが選択され、選択されたフィルタが再構成ブロックに適用される。
[フレームメモリ]
フレームメモリ214は、インター予測に用いられる参照ピクチャを格納するための記憶部であり、フレームバッファと呼ばれることもある。具体的には、フレームメモリ214は、ループフィルタ部212によってフィルタされた再構成ブロックを格納する。
フレームメモリ214は、インター予測に用いられる参照ピクチャを格納するための記憶部であり、フレームバッファと呼ばれることもある。具体的には、フレームメモリ214は、ループフィルタ部212によってフィルタされた再構成ブロックを格納する。
[イントラ予測部]
イントラ予測部216は、符号化ビットストリームから読み解かれたイントラ予測モードに基づいて、ブロックメモリ210に格納されたカレントピクチャ内のブロックを参照してイントラ予測を行うことで、予測信号(イントラ予測信号)を生成する。具体的には、イントラ予測部216は、カレントブロックに隣接するブロックのサンプル(例えば輝度値、色差値)を参照してイントラ予測を行うことでイントラ予測信号を生成し、イントラ予測信号を予測制御部220に出力する。
イントラ予測部216は、符号化ビットストリームから読み解かれたイントラ予測モードに基づいて、ブロックメモリ210に格納されたカレントピクチャ内のブロックを参照してイントラ予測を行うことで、予測信号(イントラ予測信号)を生成する。具体的には、イントラ予測部216は、カレントブロックに隣接するブロックのサンプル(例えば輝度値、色差値)を参照してイントラ予測を行うことでイントラ予測信号を生成し、イントラ予測信号を予測制御部220に出力する。
なお、色差ブロックのイントラ予測において輝度ブロックを参照するイントラ予測モードが選択されている場合は、イントラ予測部216は、カレントブロックの輝度成分に基づいて、カレントブロックの色差成分を予測してもよい。
また、符号化ビットストリームから読み解かれた情報がPDPCの適用を示す場合、イントラ予測部216は、水平/垂直方向の参照画素の勾配に基づいてイントラ予測後の画素値を補正する。
[インター予測部]
インター予測部218は、フレームメモリ214に格納された参照ピクチャを参照して、カレントブロックを予測する。予測は、カレントブロック又はカレントブロック内のサブブロック(例えば4x4ブロック)の単位で行われる。例えば、インター予測部218は、符号化ビットストリームから読み解かれた動き情報(例えば動きベクトル)を用いて動き補償を行うことでカレントブロック又はサブブロックのインター予測信号を生成し、インター予測信号を予測制御部220に出力する。
インター予測部218は、フレームメモリ214に格納された参照ピクチャを参照して、カレントブロックを予測する。予測は、カレントブロック又はカレントブロック内のサブブロック(例えば4x4ブロック)の単位で行われる。例えば、インター予測部218は、符号化ビットストリームから読み解かれた動き情報(例えば動きベクトル)を用いて動き補償を行うことでカレントブロック又はサブブロックのインター予測信号を生成し、インター予測信号を予測制御部220に出力する。
なお、符号化ビットストリームから読み解かれた情報がOBMCモードを適用することを示す場合、インター予測部218は、動き探索により得られたカレントブロックの動き情報だけでなく、隣接ブロックの動き情報も用いて、インター予測信号を生成する。
また、符号化ビットストリームから読み解かれた情報がFRUCモードを適用することを示す場合、インター予測部218は、符号化ストリームから読み解かれたパターンマッチングの方法(バイラテラルマッチング又はテンプレートマッチング)に従って動き探索を行うことにより動き情報を導出する。そして、インター予測部218は、導出された動き情報を用いて動き補償を行う。
また、インター予測部218は、BIOモードが適用される場合に、等速直線運動を仮定したモデルに基づいて動きベクトルを導出する。また、符号化ビットストリームから読み解かれた情報がアフィン動き補償予測モードを適用することを示す場合には、インター予測部218は、複数の隣接ブロックの動きベクトルに基づいてサブブロック単位で動きベクトルを導出する。
[予測制御部]
予測制御部220は、イントラ予測信号及びインター予測信号のいずれかを選択し、選択した信号を予測信号として加算部208に出力する。
予測制御部220は、イントラ予測信号及びインター予測信号のいずれかを選択し、選択した信号を予測信号として加算部208に出力する。
[符号化装置及び復号装置における予測動きベクトル関連処理]
H.264及びHEVC等の動画像符号化方式では、情報量圧縮のため、Iピクチャ、Pピクチャ及びBピクチャという3種類のピクチャタイプが用いられている。Iピクチャは、ピクチャ内予測によって符号化される。ピクチャ内予測は、画面間予測又はイントラ予測とも呼ばれる。
H.264及びHEVC等の動画像符号化方式では、情報量圧縮のため、Iピクチャ、Pピクチャ及びBピクチャという3種類のピクチャタイプが用いられている。Iピクチャは、ピクチャ内予測によって符号化される。ピクチャ内予測は、画面間予測又はイントラ予測とも呼ばれる。
Pピクチャは、表示時間順で、符号化対象ピクチャよりも前方又は後方の既に符号化されている1つのピクチャを参照するインター予測によって符号化される。Bピクチャは、表示時間順で、符号化対象ピクチャよりも前方又は後方の既に符号化されている2つのピクチャを参照するインター予測によって符号化される。
インター予測では、参照ピクチャを特定するための参照ピクチャリストが生成される。参照ピクチャリストでは、インター予測で参照される符号化済みの参照ピクチャに参照ピクチャインデックスが割り当てられている。例えば、Bピクチャの符号化では、2つのピクチャが参照され得る。そのため、2つの参照ピクチャリスト(L0参照ピクチャリスト及びL1参照ピクチャリスト)が生成される。
Bピクチャ又はPピクチャにおける符号化対象ブロックの動きベクトルを符号化する方法に関して、予測動きベクトル指定モードが存在する。予測動きベクトル指定モードでは、符号化対象ブロックに隣接するブロックである隣接ブロック、及び、参照ピクチャにおいて符号化対象ブロックと位置が同じブロックであるco-locatedブロックが用いられる。
具体的には、隣接ブロック及びco-locatedブロックのそれぞれの符号化に用いられた動きベクトルから、予測動きベクトル候補が導出される。予測動きベクトル候補は、候補動きベクトルとも呼ばれる。また、予測動きベクトル候補の導出に用いられる隣接ブロック及びco-locatedブロック等のブロックは、候補ブロックとも呼ばれる。
そして、複数の予測動きベクトル候補の中から予測動きベクトルが選択され、符号化対象ブロックの動きベクトルが符号化される。その際、選択された予測動きベクトルのインデックス等がビットストリームに付加される。
なお、予測動きベクトルに関してco-locatedブロックの動きベクトルを用いる方法は、TMVP(Temporal Motion Vector Prediction)と呼ばれる。また、co-locatedブロックをColブロックと呼ぶ場合がある。また、各ブロックの動きベクトル及び参照ピクチャは、ブロックのインター予測に用いられた(又は用いられる)動きベクトル及び参照ピクチャを意味する。
図11は、隣接ブロック、及び、隣接ブロックの動きベクトルを示す概念図である。図11の例において、4つの隣接ブロックA、B、C及びDは、符号化対象ブロックに隣接する4つのブロックである。4つの隣接ブロックA、B、C及びDの4つの動きベクトルmvA、mvB、mvC及びmvDから、4つの予測動きベクトル候補が導出されてもよい。
具体的には、隣接ブロックAの動きベクトルmvAが、そのまま予測動きベクトル候補として導出されてもよい。あるいは、隣接ブロックAの動きベクトルmvAがスケーリングされ、スケーリングされた動きベクトルmvAが予測動きベクトル候補として導出されてもよい。ここで、動きベクトルのスケーリングは、動きベクトルの大きさを伸縮することであり、負の比率を用いて動きベクトルを反転することも含む。
上記のスケーリングには、符号化対象ピクチャから隣接ブロックAの参照ピクチャまでの時間差に対する、符号化対象ピクチャから符号化対象ブロックの参照ピクチャまでの時間差の比率が用いられてもよい。なお、例えば、第1ピクチャから第2ピクチャまでの時間差は、第2ピクチャの表示順から第1ピクチャの表示順を引くことで得られる値であり、負の値を取り得る。
また、隣接ブロックAの動きベクトルmvAと同様に、隣接ブロックB、C及びDの動きベクトルmvB、mvC及びmvDのそれぞれから、予測動きベクトル候補が導出され得る。
図12は、Colブロック、及び、Colブロックの動きベクトルを示す概念図である。なお、各ピクチャは2次元であるが、図12等における各ピクチャは、説明の便宜上、1次元で表現されている。
図12の例において、Colブロックは、動きベクトルmvColを用いて第1参照ピクチャを参照して、符号化されている。例えば、Colブロックの動きベクトルmvColから、予測動きベクトル候補が導出される。
具体的には、Colブロックの動きベクトルmvColが、そのまま予測動きベクトル候補として導出されてもよい。あるいは、Colブロックの動きベクトルmvColがスケーリングされ、スケーリングされた動きベクトルmvColが予測動きベクトル候補として導出されてもよい。このスケーリングには、Colブロックを含む第2参照ピクチャからColブロックの参照ピクチャまでの時間差に対する、符号化対象ピクチャから符号化対象ブロックの参照ピクチャまでの時間差の比率が用いられてもよい。
さらに、現在、HEVCの次世代の動画像符号化方式が、MPEGとITU-Tとの合同の検討部会であるJVET(Joint Video Exploration Team)で検討されている。その中で、TMVPの改良方式であるATMVP(Advanced Temporal Motion Vector Prediction)が検討されている。
例えば、ATMVPでは、隣接ブロックの動きベクトルに基づいて、符号化対象ブロックの動きベクトルが暫定的に決定される。そして、暫定的に決定された動きベクトルによって指し示されるブロックがATMVPブロックとして定められる。そして、ATMVPブロックにおける動きベクトル(ATMV:Advanced Temporal Motion Vector)が予測動きベクトル候補として用いられる。
なお、ATMVPブロックをAdvブロックと呼ぶ場合がある。ATMVPブロックは、候補動きベクトルの導出に用いられる候補ブロックの例である。
図13は、Advブロック、及び、Advブロックの動きベクトルを示す概念図である。例えば、図11に示された隣接ブロックDの動きベクトルmvDが、符号化対象ブロックの動きベクトルとして、暫定的に決定される。そして、動きベクトルmvDによって符号化対象ブロックから指し示されるブロックが、Advブロックとして定められる。
また、例えば、動きベクトルmvDによって第2参照ピクチャにおいて指し示される領域が隣接ブロックDの予測画像生成に用いられた場合、Advブロックは、第2参照ピクチャに含まれる。すなわち、Advブロックを含む参照ピクチャは、隣接ブロックDの参照ピクチャを示す参照ピクチャインデックスによって示される。そして、Advブロックの動きベクトルmvAdvから、予測動きベクトル候補が導出される。
具体的には、Advブロックの動きベクトルmvAdvが、そのまま予測動きベクトル候補として導出されてもよい。あるいは、Advブロックの動きベクトルmvAdvがスケーリングされ、スケーリングされた動きベクトルmvAdvが予測動きベクトル候補として導出されてもよい。このスケーリングには、Advブロックを含む第2参照ピクチャからAdvブロックの参照ピクチャまでの時間差に対する、符号化対象ピクチャから符号化対象ブロックの参照ピクチャまでの時間差の比率が用いられてもよい。
例えば、符号化対象ブロックが移動物の範囲内の画像である場合でも、Advブロックは、移動物の動きに追従して、移動物の範囲内において符号化対象ブロックと相対的に同じ位置に定められ得る。このようなAdvブロックの動きベクトルは、符号化対象ブロックの動きベクトルと同じ特性を有し得る。したがって、Advブロックの動きベクトルmvAdvから、適切な予測動きベクトル候補が導出され得る。
なお、Advブロックの決定において、隣接ブロックDのインター予測に用いられた動きベクトルmvD及び第2参照ピクチャがそのまま用いられなくてもよい。Advブロックは、隣接ブロックDのインター予測に用いられた第2参照ピクチャとは異なる参照ピクチャにおいて定められてもよい。例えば、Advブロックは、符号化対象ピクチャの直前又は直後の参照ピクチャにおいて定められてもよい。
そして、隣接ブロックDのインター予測に用いられた動きベクトルmvDに対してスケーリングが適用され、スケーリングが適用された動きベクトルmvDを用いて、Advブロックが定められてもよい。このスケーリングには、符号化対象ピクチャから、隣接ブロックDのインター予測に用いられた第2参照ピクチャまでの時間差に対する、符号化対象ピクチャから、Advブロックが定められる参照ピクチャまでの時間差の比率が用いられてもよい。
上記の通り、現在検討されているATMVPでは、隣接ブロックの動きベクトルに基づいて、符号化対象ブロックの動きベクトルが暫定的に決定され、暫定的に決定された動きベクトルによって指し示されるブロックがATMVPブロックとして定められる。つまり、単一のATMVPブロックが定められる。そして、単一のATMVPブロックの動きベクトルから、予測動きベクトル候補が導出される。
TMVPでも、同様に、単一のco-locatedブロックが定められ、単一のco-locatedブロックの動きベクトルから、予測動きベクトル候補が導出される。つまり、ATMVPでもTMVPでも、単一のブロックの動きベクトルから予測動きベクトル候補が導出される。したがって、L0参照ピクチャリストに含まれるブロックと、L1参照ピクチャリストに含まれるブロックとのうち、一方のみのブロックから、予測動きベクトル候補が導出される。
上記のように導出される予測動きベクトル候補は、必ずしも適切な予測動きベクトル候補ではない。符号化対象ブロックが、画像における移動物の範囲の境界の近傍に位置し、移動物の範囲内の動きと、移動物の範囲外の動きとが異なる場合、ATMVPブロックの動きベクトルと、符号化対象ブロックの動きベクトルとが、大きく乖離する可能性がある。
図14は、符号化対象ブロック、4つの隣接ブロックA、B、C及びD、並びに、移動物の範囲の関係の例を示す概念図である。この例では、符号化対象ブロックが移動物の範囲の境界を跨ぎ、さらに、符号化対象ブロックの大部分が移動物の範囲内に含まれる。この例において、隣接ブロックDは、移動物の範囲外に位置し、具体的には背景に含まれる。
図15は、適切でないAdvブロックの例を示す概念図である。具体的には、図15は、図14の例において、隣接ブロックDの動きベクトルmvDに従って決定されるAdvブロックを示す。
Advブロックが隣接ブロックDの動きベクトルmvDに従って決定された場合、Advブロックが、移動物の範囲外に位置し、背景に含まれる可能性が高い。したがって、この場合、Advブロックの動きベクトルは、背景の動きを示しており、大部分が移動物の範囲内に含まれる符号化対象ブロックの動きを正しく示していない。よって、Advブロックの動きベクトルから、適切な予測動きベクトル候補が導出されない。
本実施の形態の符号化装置100及び復号装置200は、L0参照ピクチャリストに含まれる参照ピクチャ内のブロックと、L1参照ピクチャリストに含まれる参照ピクチャ内のブロックとのそれぞれを用いて、時間的な予測動きベクトル候補を導出する。これにより、符号化装置100及び復号装置200は、処理対象ブロックが移動物の範囲の境界の近傍に位置する場合でも、処理対象ブロックの動きに整合する時間的な予測動きベクトル候補が導出される可能性を高めることができる。
なお、時間的な予測動きベクトル候補は、処理対象ブロックに対する時間的な関係を用いて定められるブロックから導出される予測動きベクトル候補であり、時間候補動きベクトルとも呼ばれる。また、空間的な予測動きベクトル候補は、処理対象ブロックに対する空間的な関係を用いて定められるブロックから導出される予測動きベクトル候補であり、空間候補動きベクトルとも呼ばれる。
[符号化装置及び復号装置の詳細構成]
図16は、図1に示された符号化装置100の機能構成をより具体的に示すブロック図である。図1と比較して、図16には、さらに、ピクチャタイプ決定部132、候補リスト生成部134及び候補ブロック情報メモリ136が示されている。すなわち、符号化装置100は、さらに、ピクチャタイプ決定部132、候補リスト生成部134及び候補ブロック情報メモリ136を備える。
図16は、図1に示された符号化装置100の機能構成をより具体的に示すブロック図である。図1と比較して、図16には、さらに、ピクチャタイプ決定部132、候補リスト生成部134及び候補ブロック情報メモリ136が示されている。すなわち、符号化装置100は、さらに、ピクチャタイプ決定部132、候補リスト生成部134及び候補ブロック情報メモリ136を備える。
上述したように、符号化装置100は、例えば、汎用プロセッサ及びメモリにより実現される。この場合、メモリに格納されたソフトウェアプログラムがプロセッサにより実行されたときに、プロセッサは、さらに、ピクチャタイプ決定部132及び候補リスト生成部134等として機能する。また、符号化装置100は、ピクチャタイプ決定部132及び候補リスト生成部134等を含む複数の構成要素に対応する専用の1以上の電子回路として実現されてもよい。
ピクチャタイプ決定部132は、動画像を構成する複数のピクチャのそれぞれについて、ピクチャタイプを決定する。例えば、ピクチャタイプ決定部132は、Iピクチャ、Pピクチャ及びBピクチャという3種類のピクチャタイプの中から、ピクチャ毎にピクチャタイプを選択することにより、各ピクチャのピクチャタイプを決定する。ピクチャタイプ決定部132は、ピクチャの符号化順又は表示順に従って、ピクチャタイプを決定してもよい。
また、ピクチャタイプ決定部132は、ピクチャ毎に決定されたピクチャタイプを出力することにより、ピクチャタイプを予測制御部128に入力する。予測制御部128は、入力されたピクチャタイプに従って、イントラ予測信号及びインター予測信号のいずれかを選択し、選択された信号を予測信号として出力する。
例えば、入力されたピクチャタイプがIピクチャである場合、予測制御部128は、イントラ予測信号を選択し、イントラ予測信号を出力する。一方、入力されたピクチャタイプがPピクチャ又はBピクチャである場合、予測制御部128は、インター予測信号を選択し、インター予測信号を出力する。あるいは、Pピクチャ又はBピクチャの場合、予測制御部128は、ブロック毎に、イントラ予測信号及びインター予測信号のいずれかを選択し、選択された信号を予測信号として出力してもよい。
候補リスト生成部134は、候補動きベクトルのリストを生成する。つまり、候補リスト生成部134は、1つ以上の候補動きベクトルで構成されるリストを生成する。このリストは、候補リスト、候補動きベクトルリスト又は予測動きベクトル候補リストとも表現され得る。このリストの生成の詳細は、図18A~図30等を用いて、後述する。
また、候補リスト生成部134は、生成された候補リストを出力することにより、候補リストをインター予測部126に入力する。インター予測部126は、入力された候補リストに含まれる1つ以上の候補動きベクトルの中から、予測動きベクトルを選択する。
そして、エントロピー符号化部(可変長符号化部)110は、選択された予測動きベクトルのインデックスである予測動きベクトルインデックス、及び、選択された予測動きベクトルと符号化対象ブロックの動きベクトルとの差分動きベクトルを符号化する。例えば、予測動きベクトル指定モードにおいて、エントロピー符号化部110は、予測動きベクトルインデックス、及び、差分動きベクトルを符号化する。
また、マージモードにおいて、インター予測部126は、選択された予測動きベクトルを符号化対象ブロックの動きベクトルとして用いて、予測画像を生成する。また、マージモードにおいて、エントロピー符号化部110は、差分動きベクトルを符号化せずに、予測動きベクトルインデックスを符号化する。
また、インター予測部126は、FRUCに従って、予測動きベクトルを選択し、選択された予測動きベクトルを符号化対象ブロックの動きベクトルとして用いて、予測画像を生成してもよい。この場合、エントロピー符号化部110は、予測動きベクトルインデックス及び差分動きベクトル等の動きベクトル情報を符号化しない。
候補ブロック情報メモリ136は、候補動きベクトルの生成に用いられる情報を格納するためのメモリである。具体的には、候補ブロック情報メモリ136には、符号化対象ピクチャ又は参照ピクチャにおける候補ブロックの情報が格納される。候補ブロックの情報は、例えば、候補ブロックの動きベクトルを示す情報である。
より具体的には、インター予測部126は、符号化対象ブロックの予測画像生成に用いられた動きベクトルを示す情報を候補ブロック情報メモリ136に格納してもよい。そして、候補リスト生成部134は、候補ブロック情報メモリ136に格納された情報を候補ブロックの情報として他の符号化対象ブロックの予測画像生成時に参照してもよい。
なお、インター予測部126は、候補リスト生成部134を含んでいてもよいし、候補ブロック情報メモリ136を含んでいてもよい。すなわち、インター予測部126は、候補リスト生成部134の役割を果たしてもよいし、候補ブロック情報メモリ136の役割を果たしてもよい。
また、減算部104、エントロピー符号化部110、加算部116及びインター予測部126等によって、インター予測符号化が行われる。これらの構成要素は、インター予測符号化部を構成してもよい。
図17は、図10に示された復号装置200の機能構成をより具体的に示すブロック図である。図10と比較して、図17には、さらに、候補リスト生成部234及び候補ブロック情報メモリ236が示されている。すなわち、復号装置200は、さらに、候補リスト生成部234及び候補ブロック情報メモリ236を備える。
上述したように、復号装置200は、例えば、汎用プロセッサ及びメモリにより実現される。この場合、メモリに格納されたソフトウェアプログラムがプロセッサにより実行されたときに、プロセッサは、さらに、候補リスト生成部234等として機能する。また、復号装置200は、候補リスト生成部234等を含む複数の構成要素に対応する専用の1以上の電子回路として実現されてもよい。
復号装置200の候補リスト生成部234は、符号化装置100の候補リスト生成部134と同様に動作する。すなわち、候補リスト生成部234は、1つ以上の候補動きベクトルで構成される候補リストを生成する。この候補リストの生成の詳細は、図18A~図30等を用いて後述する。なお、図18A~図30等では、主に、符号化装置100の動作が示されているが、候補リストの生成に関して、復号装置200も、符号化装置100と同様に動作する。これらの説明における符号化は、復号に適宜読み替えられ得る。
また、候補リスト生成部234は、生成された候補リストを出力することにより、候補リストをインター予測部218に入力する。インター予測部218は、入力された候補リストに含まれる1つ以上の候補動きベクトルの中から、予測動きベクトルを選択する。
例えば、エントロピー復号部(可変長復号部)202は、予測動きベクトル指定モードにおいて、予測動きベクトルインデックス、及び、差分動きベクトルを復号する。この場合、インター予測部218は、予測動きベクトルインデックスに従って、予測動きベクトルを選択する。
そして、インター予測部218は、選択された予測動きベクトルと、復号された差分動きベクトルとを加算することにより、復号対象ブロックの動きベクトルを導出する。さらに、インター予測部218は、復号対象ブロックの動きベクトルを用いて、復号対象ブロックの予測画像を生成する。
また、マージモードにおいて、エントロピー復号部202は、差分動きベクトルを復号せずに、予測動きベクトルインデックスを復号する。この場合も、インター予測部218は、予測動きベクトルインデックスに従って、予測動きベクトルを選択する。そして、インター予測部218は、選択された予測動きベクトルを復号対象ブロックの動きベクトルとして用いて、復号対象ブロックの予測画像を生成する。
また、インター予測部218は、FRUCに従って、予測動きベクトルを選択し、選択された予測動きベクトルを復号対象ブロックの動きベクトルとして用いて、予測画像を生成してもよい。この場合、エントロピー復号部202は、予測動きベクトルインデックス及び差分動きベクトル等の動きベクトル情報を復号しない。
候補ブロック情報メモリ236は、候補動きベクトルの生成に用いられる情報を格納するためのメモリである。すなわち、復号装置200の候補ブロック情報メモリ236は、符号化装置100の候補ブロック情報メモリ136と同じような役割を果たす。具体的には、候補ブロック情報メモリ236には、復号対象ピクチャ又は参照ピクチャにおける候補ブロックの情報が格納される。
より具体的には、インター予測部218は、復号対象ブロックの予測画像生成に用いられた動きベクトルを示す情報を候補ブロック情報メモリ236に格納してもよい。そして、候補リスト生成部234は、候補ブロック情報メモリ236に格納された情報を候補ブロックの情報として他の復号対象ブロックの予測画像生成時に参照してもよい。
また、エントロピー復号部202は、各ピクチャのピクチャタイプを復号する。そして、エントロピー復号部202は、各ピクチャのピクチャタイプを出力することにより、各ピクチャのピクチャタイプを予測制御部220に入力する。予測制御部220は、符号化装置100の予測制御部128と同様に、入力されたピクチャタイプに従って、イントラ予測信号及びインター予測信号のいずれかを選択し、選択された信号を予測信号として出力する。
なお、インター予測部218は、候補リスト生成部234を含んでいてもよいし、候補ブロック情報メモリ236を含んでいてもよい。すなわち、インター予測部218は、候補リスト生成部234の役割を果たしてもよいし、候補ブロック情報メモリ236の役割を果たしてもよい。
また、エントロピー復号部202、加算部208及びインター予測部218等によって、インター予測復号が行われる。これらの構成要素は、インター予測復号部を構成してもよい。
[co-locatedブロックから導出される候補動きベクトル]
符号化対象ピクチャがBピクチャである場合、符号化対象ピクチャに対してL0参照ピクチャリスト及びL1参照ピクチャリストが定められる。例えば、時間候補動きベクトルは、L0参照ピクチャリストに含まれる参照ピクチャのco-locatedブロックと、L1参照ピクチャリストに含まれる参照ピクチャのco-locatedブロックとのそれぞれから導出される。
符号化対象ピクチャがBピクチャである場合、符号化対象ピクチャに対してL0参照ピクチャリスト及びL1参照ピクチャリストが定められる。例えば、時間候補動きベクトルは、L0参照ピクチャリストに含まれる参照ピクチャのco-locatedブロックと、L1参照ピクチャリストに含まれる参照ピクチャのco-locatedブロックとのそれぞれから導出される。
基本的に、L0参照ピクチャリストは、符号化対象ピクチャよりも表示順で前の参照ピクチャを含み、L1参照ピクチャリストは、符号化対象ピクチャよりも表示順で後の参照ピクチャを含む。しかしながら、このような態様に限られず、L0参照ピクチャリストが符号化対象ピクチャよりも表示順で後の参照ピクチャを含んでもよいし、L1参照ピクチャリストが符号化対象ピクチャよりも表示順で前の参照ピクチャを含んでもよい。
ここでは、L0参照ピクチャリストに含まれる参照ピクチャを参照ピクチャL0[n]と表現する場合がある。また、L1参照ピクチャリストに含まれる参照ピクチャを参照ピクチャL1[n]と表現する場合がある。参照ピクチャL0[n]及びL1[n]におけるnは、参照ピクチャインデックスであり、0以上の整数である。
また、L0参照ピクチャリストに含まれる参照ピクチャにおけるco-locatedブロックをCol0ブロックと呼ぶ場合がある。また、L1参照ピクチャリストに含まれる参照ピクチャにおけるco-locatedブロックをCol1ブロックと呼ぶ場合がある。
例えば、Col0ブロックは、L0参照ピクチャリストにおいて参照ピクチャインデックスが0である参照ピクチャL0[0]に含まれ、符号化対象ブロックと相対的に同じ位置のブロックである。また、例えば、Col1ブロックは、L1参照ピクチャリストにおいて参照ピクチャインデックスが0である参照ピクチャL1[0]に含まれ、符号化対象ブロックと相対的に同じ位置のブロックである。
そして、時間候補動きベクトルは、Col0ブロックとCol1ブロックとのそれぞれから導出される。まず、図18A及び図18Bを用いて、Col0ブロック及びCol1ブロックのそれぞれが双予測で符号化されている場合の例を説明する。
図18Aは、双予測のCol0ブロックから導出される候補動きベクトルを示す概念図である。この例において、L0参照ピクチャリストに含まれる参照ピクチャL0[0]及びL0[1]は、符号化対象ピクチャよりも前に位置し、L1参照ピクチャリストに含まれる参照ピクチャL1[0]及びL1[1]は、符号化対象ピクチャよりも後に位置する。
Col0ブロックは、参照ピクチャL0[0]に含まれ、双予測で符号化されている。Col0ブロックの双予測では、前方向の参照ピクチャL0[1]が動きベクトルmvCol0L0によって参照されており、後方向の参照ピクチャL1[1]が動きベクトルmvCol0L1によって参照されている。
この例では、参照ピクチャL0[0]から参照ピクチャL1[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvCol0L1がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvCol0L1L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL0[0]から参照ピクチャL1[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvCol0L1がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvCol0L1L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Col0ブロックの動きベクトルmvCol0L1をスケーリングして、双予測に利用可能な2つの動きベクトルmvCol0L1L0及びmvCol0L1L1のそれぞれを時間候補動きベクトルとして導出する。
この例では、Col0ブロックの2つの動きベクトルmvCol0L0及びmvCol0L1のうち、Col0ブロックを含む参照ピクチャL0[0]から符号化対象ピクチャへの方向に参照方向が一致する動きベクトルmvCol0L1が用いられる。これにより、2つの動きベクトルmvCol0L0及びmvCol0L1のうち、符号化対象ブロックと関連が強いと想定される動きベクトルmvCol0L1を用いて、時間候補動きベクトルが導出される。
しかしながら、動きベクトルmvCol0L1に代えて、動きベクトルmvCol0L0が用いられてもよい。例えば、候補リスト生成部134は、所定の評価基準に従って、2つの動きベクトルmvCol0L0及びmvCol0L1のそれぞれを評価し、2つの動きベクトルmvCol0L0及びmvCol0L1の中から一方を選択してもよい。そして、候補リスト生成部134は、選択された一方の動きベクトルから、時間候補動きベクトルを導出してもよい。
具体的には、Col0ブロックの2つの動きベクトルmvCol0L0及びmvCol0L1の中から、各動きベクトルのサイズ、又は、各動きベクトルによって参照される参照ピクチャまでの時間的距離に従って、1つの動きベクトルが選択されてもよい。例えば、サイズが小さい動きベクトルが選択されてもよいし、時間的距離が短い動きベクトルが選択されてもよい。
あるいは、候補リスト生成部134は、各動きベクトルに基づく予測残差又はR-Dコストを算出し、2つの動きベクトルmvCol0L0及びmvCol0L1のうち、算出された予測残差又はR-Dコストが小さい動きベクトルを選択してもよい。ここで、R-Dコストは、符号化歪みと発生符号量との重み付け和である。
そして、エントロピー符号化部110は、選択された動きベクトルの識別情報を符号化してもよい。また、復号装置200において、エントロピー復号部202が、動きベクトルの識別情報を復号し、候補リスト生成部234が、復号された識別情報に従って動きベクトルを選択してもよい。
特に、Col0ブロックが、前方向及び後方向のうち1つの方向のみの双予測で符号化されている場合、Col0ブロックの2つの動きベクトルのうちの一方のスケーリングによって、反対方向を参照するための時間候補動きベクトルが導出されてもよい。
すなわち、候補リスト生成部134は、この場合、上述した選択方法に従って、2つの動きベクトルの中から1つの動きベクトルを選択し、選択された1つの動きベクトルに対して負の比率のスケーリングを適用してもよい。これにより、選択された1つの動きベクトルとは参照方向が反対の時間候補動きベクトルが導出される。
また、動きベクトルmvCol0L1に加えて、動きベクトルmvCol0L0が用いられてもよい。例えば、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1のそれぞれから、双予測に利用可能な2つの時間候補動きベクトルを導出してもよい。これにより、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1から、4つの時間候補動きベクトルを導出してもよい。
図18Bは、双予測のCol1ブロックから導出される候補動きベクトルを示す概念図である。この例における各ピクチャ及び符号化対象ブロック等は、図18Aの例と同じである。
Col1ブロックは、参照ピクチャL1[0]に含まれ、双予測で符号化されている。Col1ブロックの双予測では、前方向の参照ピクチャL0[1]が動きベクトルmvCol1L0によって参照されており、後方向の参照ピクチャL1[1]が動きベクトルmvCol1L1によって参照されている。
この例では、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvCol1L0がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvCol1L0L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvCol1L0がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvCol1L0L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Col1ブロックの動きベクトルmvCol1L0をスケーリングして、双予測に利用可能な2つの動きベクトルmvCol1L0L0及びmvCol1L0L1のそれぞれを時間候補動きベクトルとして導出する。
この例では、Col1ブロックの2つの動きベクトルmvCol1L0及びmvCol1L1のうち、Col1ブロックを含む参照ピクチャL1[0]から符号化対象ピクチャへの方向に参照方向が一致する動きベクトルmvCol1L0が用いられる。これにより、2つの動きベクトルmvCol1L0及びmvCol1L1のうち、符号化対象ブロックと関連が強いと想定される動きベクトルmvCol1L0を用いて、時間候補動きベクトルが導出される。
しかしながら、動きベクトルmvCol1L0に代えて、動きベクトルmvCol1L1が用いられてもよい。例えば、候補リスト生成部134は、所定の評価基準に従って、2つの動きベクトルmvCol1L0及びmvCol1L1のそれぞれを評価し、2つの動きベクトルmvCol1L0及びmvCol1L1の中から一方を選択してもよい。そして、候補リスト生成部134は、選択された一方の動きベクトルから、時間候補動きベクトルを導出してもよい。
具体的には、候補リスト生成部134は、Col0ブロックについて1つの動きベクトルを選択する場合と同様に、Col1ブロックの2つの動きベクトルmvCol1L0及びmvCol1L1の中から、1つの動きベクトルを選択することができる。特に、Col0ブロックと同様に、Col1ブロックが、前方向及び後方向のうち1つの方向のみの双予測で符号化されている場合、2つの動きベクトルのうちの一方のスケーリングによって、反対方向を参照するための時間候補動きベクトルが導出されてもよい。
また、動きベクトルmvCol1L0に加えて、動きベクトルmvCol1L1が用いられてもよい。例えば、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1のそれぞれから、双予測に利用可能な2つの時間候補動きベクトルを導出してもよい。これにより、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1から、4つの時間候補動きベクトルを導出してもよい。
次に、図19A及び図19Bを用いて、Col0ブロック及びCol1ブロックのそれぞれが単予測で符号化されている場合の例を説明する。
図19Aは、単予測のCol0ブロックから導出される候補動きベクトルを示す概念図である。この例において、図18Aと同様に、参照ピクチャL0[0]及びL0[1]は、符号化対象ピクチャよりも前に位置し、参照ピクチャL1[0]及びL1[1]は、符号化対象ピクチャよりも後に位置する。Col0ブロックは、参照ピクチャL0[0]に含まれ、単予測で符号化されている。Col0ブロックの単予測では、前方向の参照ピクチャL0[1]が動きベクトルmvCol0L0によって参照されている。
この例では、参照ピクチャL0[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvCol0L0がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvCol0L0L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL0[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvCol0L0がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvCol0L0L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Col0ブロックの動きベクトルmvCol0L0をスケーリングして、双予測に利用可能な2つの動きベクトルmvCol0L0L0及びmvCol0L0L1のそれぞれを時間候補動きベクトルとして導出する。
図19Bは、単予測のCol1ブロックから導出される候補動きベクトルを示す概念図である。この例における各ピクチャ及び符号化対象ブロック等は、図19Aの例と同じである。Col1ブロックは、参照ピクチャL1[0]に含まれ、単予測で符号化されている。Col1ブロックの単予測では、前方向の参照ピクチャL0[1]が動きベクトルmvCol1L0によって参照されている。
この例では、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvCol1L0がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvCol1L0L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvCol1L0がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvCol1L0L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Col1ブロックの動きベクトルmvCol1L0をスケーリングして、双予測に利用可能な2つの動きベクトルmvCol1L0L0及びmvCol1L0L1のそれぞれを時間候補動きベクトルとして導出する。
次に、図20A及び図20Bを用いて、符号化対象ブロックが、前方向及び後方向のうち一方向のみの双予測で符号化される場合の例を説明する。
図20Aは、一方向のみの双予測の符号化対象ブロックに対して、双予測のCol0ブロックから導出される候補動きベクトルを示す概念図である。この例において、L0参照ピクチャリストに含まれる参照ピクチャL0[0]及びL0[1]、並びに、L1参照ピクチャリストに含まれる参照ピクチャL1[0]は、符号化対象ピクチャよりも前に位置する。
Col0ブロックは、参照ピクチャL0[0]に含まれ、双予測で符号化されている。Col0ブロックの双予測では、前方向の参照ピクチャL0[1]が動きベクトルmvCol0L0によって参照されており、後方向のピクチャNLが動きベクトルmvCol0L1によって参照されている。
この例では、参照ピクチャL0[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvCol0L0がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvCol0L0L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL0[0]からピクチャNLまでの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvCol0L1がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvCol0L1L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Col0ブロックの動きベクトルmvCol0L0及びmvCol0L1のそれぞれをスケーリングする。これにより、候補リスト生成部134は、双予測に利用可能な2つの動きベクトルmvCol0L0L0及びmvCol0L1L1のそれぞれを時間候補動きベクトルとして導出する。
この例では、Col0ブロックの一方の動きベクトルmvCol0L0から、L0参照ピクチャリストに含まれる参照ピクチャL0[0]を参照する動きベクトルmvCol0L0L0が時間候補動きベクトルとして導出される。そして、Col0ブロックの他方の動きベクトルmvCol0L1から、L1参照ピクチャリストに含まれる参照ピクチャL1[0]を参照する動きベクトルmvCol0L1L1が時間候補動きベクトルとして導出される。
例えば、Col0ブロックの双予測において、Col0ブロックの動きベクトルmvCol0L0が参照する参照ピクチャL0[1]は、Col0ブロックに対するL0参照ピクチャリストに含まれていた参照ピクチャである。そして、Col0ブロックの双予測において、Col0ブロックの動きベクトルmvCol0L1が参照する参照ピクチャNLは、Col0ブロックに対するL1参照ピクチャリストに含まれていた参照ピクチャである。
つまり、Col0ブロックに対するL0参照ピクチャリストを参照する動きベクトルmvCol0L0から、符号化対象ブロックに対するL0参照ピクチャリストを参照する動きベクトルmvCol0L0L0が時間候補動きベクトルとして導出される。そして、Col0ブロックに対するL1参照ピクチャリストを参照する動きベクトルmvCol0L1から、符号化対象ブロックに対するL1参照ピクチャリストを参照する動きベクトルmvCol0L1L1が時間候補動きベクトルとして導出される。
これにより、Col0ブロックに対する2つの参照ピクチャリストを参照する2つの動きベクトルmvCol0L0及びmvCol0L1から、符号化対象ブロックに対する2つの参照ピクチャリストを参照する2つの時間候補動きベクトルが導出される。
なお、L0参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol0L0に代えて、動きベクトルmvCol0L1が用いられてもよい。同様に、L1参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol0L1に代えて、動きベクトルmvCol0L0が用いられてもよい。
例えば、候補リスト生成部134は、2つの参照ピクチャリストのそれぞれについて、2つの動きベクトルmvCol0L0及びmvCol0L1を評価し、2つの動きベクトルmvCol0L0及びmvCol0L1の中から一方を選択してもよい。そして、候補リスト生成部134は、2つの参照ピクチャリストのそれぞれについて、選択された一方の動きベクトルから、時間候補動きベクトルを導出してもよい。
また、L0参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol0L0に加えて、動きベクトルmvCol0L1が用いられてもよい。同様に、L1参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol0L1に加えて、動きベクトルmvCol0L0が用いられてもよい。
例えば、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1から、L0参照ピクチャリストに含まれる参照ピクチャL0[0]を参照する2つの時間候補動きベクトルを導出してもよい。また、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1から、L1参照ピクチャリストに含まれる参照ピクチャL1[0]を参照する2つの時間候補動きベクトルを導出してもよい。
これにより、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1から、4つの時間候補動きベクトルを導出してもよい。
また、符号化対象ブロックが単予測で符号化される場合、候補リスト生成部134は、L0参照ピクチャリストを参照する時間候補動きベクトル、及び、L1参照ピクチャリストを参照する時間候補動きベクトルのうち、一方のみを導出する。
例えば、上記の場合において、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1のうち少なくとも1つから、参照ピクチャL0[0]を参照する少なくとも1つの時間候補動きベクトルを導出してもよい。あるいは、候補リスト生成部134は、2つの動きベクトルmvCol0L0及びmvCol0L1のうち少なくとも1つから、参照ピクチャL1[0]を参照する少なくとも1つの時間候補動きベクトルを導出してもよい。
図20Bは、一方向のみの双予測の符号化対象ブロックに対して、双予測のCol1ブロックから導出される候補動きベクトルを示す概念図である。この例における各ピクチャ及び符号化対象ブロック等は、図20Aの例と同じである。Col1ブロックは、参照ピクチャL1[0]に含まれ、双予測で符号化されている。Col1ブロックの双予測では、前方向の参照ピクチャL0[0]が動きベクトルmvCol1L0によって参照されており、後方向のピクチャNLが動きベクトルmvCol1L1によって参照されている。
この例では、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvCol1L0がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvCol1L0L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL1[0]からピクチャNLまでの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvCol1L1がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvCol1L1L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Col1ブロックの動きベクトルmvCol1L0及びmvCol1L1のそれぞれをスケーリングする。これにより、候補リスト生成部134は、双予測に利用可能な2つの動きベクトルmvCol1L0L0及びmvCol1L1L1のそれぞれを時間候補動きベクトルとして導出する。
この例では、Col1ブロックの一方の動きベクトルmvCol1L0から、L0参照ピクチャリストに含まれる参照ピクチャL0[0]を参照する動きベクトルmvCol1L0L0が時間候補動きベクトルとして導出される。そして、Col1ブロックの他方の動きベクトルmvCol1L1から、L1参照ピクチャリストに含まれる参照ピクチャL1[0]を参照する動きベクトルmvCol1L1L1が時間候補動きベクトルとして導出される。
例えば、Col1ブロックの双予測において、Col1ブロックの動きベクトルmvCol1L0が参照する参照ピクチャL0[1]は、Col1ブロックに対するL0参照ピクチャリストに含まれていた参照ピクチャである。そして、Col1ブロックの双予測において、Col1ブロックの動きベクトルmvCol1L1が参照する参照ピクチャNLは、Col1ブロックに対するL1参照ピクチャリストに含まれていた参照ピクチャである。
つまり、Col1ブロックに対するL0参照ピクチャリストを参照する動きベクトルmvCol1L0から、符号化対象ブロックに対するL0参照ピクチャリストを参照する動きベクトルmvCol1L0L0が時間候補動きベクトルとして導出される。そして、Col1ブロックに対するL1参照ピクチャリストを参照する動きベクトルmvCol1L1から、符号化対象ブロックに対するL1参照ピクチャリストを参照する動きベクトルmvCol1L1L1が時間候補動きベクトルとして導出される。
これにより、Col1ブロックに対する2つの参照ピクチャリストを参照する2つの動きベクトルmvCol1L0及びmvCol1L1から、符号化対象ブロックに対する2つの参照ピクチャリストを参照する2つの時間候補動きベクトルが導出される。
なお、L0参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol1L0に代えて、動きベクトルmvCol1L1が用いられてもよい。同様に、L1参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol1L1に代えて、動きベクトルmvCol1L0が用いられてもよい。
例えば、候補リスト生成部134は、2つの参照ピクチャリストのそれぞれについて、2つの動きベクトルmvCol1L0及びmvCol1L1を評価し、2つの動きベクトルmvCol1L0及びmvCol1L1の中から一方を選択してもよい。そして、候補リスト生成部134は、2つの参照ピクチャリストのそれぞれについて、選択された一方の動きベクトルから、時間候補動きベクトルを導出してもよい。
また、L0参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol1L0に加えて、動きベクトルmvCol1L1が用いられてもよい。同様に、L1参照ピクチャリストを参照する時間候補動きベクトルの導出において、動きベクトルmvCol1L1に加えて、動きベクトルmvCol1L0が用いられてもよい。
例えば、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1から、L0参照ピクチャリストに含まれる参照ピクチャL0[0]を参照する2つの時間候補動きベクトルを導出してもよい。また、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1から、L1参照ピクチャリストに含まれる参照ピクチャL1[0]を参照する2つの時間候補動きベクトルを導出してもよい。
これにより、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1から、4つの時間候補動きベクトルを導出してもよい。
また、符号化対象ブロックが単予測で符号化される場合、候補リスト生成部134は、L0参照ピクチャリストを参照する時間候補動きベクトル、及び、L1参照ピクチャリストを参照する時間候補動きベクトルのうち、一方のみを導出する。
例えば、上記の場合において、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1のうち少なくとも1つから、参照ピクチャL0[0]を参照する少なくとも1つの時間候補動きベクトルを導出してもよい。あるいは、候補リスト生成部134は、2つの動きベクトルmvCol1L0及びmvCol1L1のうち少なくとも1つから、参照ピクチャL1[0]を参照する少なくとも1つの時間候補動きベクトルを導出してもよい。
上記の図18A~図20Bの複数の例では、主に、符号化装置100の動作が示されているが、復号装置200も、符号化装置100と同様に動作する。つまり、復号装置200の各構成要素は、符号化装置100において対応する構成要素と同様に動作する。そして、上記の説明における符号化は、復号に適宜読み替えられ得る。
複数の候補動きベクトルの中から選択された予測動きベクトルを特定するための予測動きベクトルインデックスが符号化される場合、複数の候補動きベクトルのそれぞれに対してインデックスが与えられる。具体的には、符号化装置100及び復号装置200は、予め定められた共通のインデックス付与規則に従って、複数の候補動きベクトルのそれぞれに対してインデックスを与える。そして、予測動きベクトルとして選択された候補動きベクトルに対して与えられたインデックスが符号化され復号される。
複数の候補動きベクトルのそれぞれに対して与えられるインデックスは、番号によって表現されてもよい。
また、上記の例では、Col0ブロック及びCol1ブロックのそれぞれが、双予測又は単予測で符号化されている。Col0ブロック及びCol1ブロックのうち一方が双予測で他方が単予測で符号化されている場合、上記の例の組み合わせによって、時間候補動きベクトルが導出され得る。例えば、Col0ブロックが双予測で符号化されており、かつ、Col1ブロックが単予測で符号化されている場合、図18Aの例と、図19Bの例との組み合わせによって、時間候補動きベクトルが導出され得る。
また、図18Aの例と、図19Bの例との組み合わせに限らず、上記の任意の複数の例が、組み合わされてもよい。
また、上記の複数の例において、参照ピクチャインデックスが0である参照ピクチャが、Col0ブロックを含む参照ピクチャ、又は、Col1ブロックを含む参照ピクチャとして用いられている。しかしながら、参照ピクチャインデックスが0でない参照ピクチャが、Col0ブロックを含む参照ピクチャ、又は、Col1ブロックを含む参照ピクチャとして用いられてもよい。
上記の通り、Col0ブロック及びCol1ブロックのそれぞれから候補動きベクトルが導出される。例えば、Col0ブロックとCol1ブロックとのうち一方が、符号化対象ブロックと同じ移動物範囲に含まれる場合がある。したがって、Col0ブロック及びCol1ブロックのそれぞれから候補動きベクトルが導出されることで、符号化対象ブロックの動きベクトルと同じ特性を有する適切な候補動きベクトルが導出され得る。
なお、全ての符号化対象ブロックについて、Col0ブロック及びCol1ブロックのそれぞれから候補動きベクトルが導出されなくてもよい。例えば、1つの符号化対象ブロックについて、Col0ブロック及びCol1ブロックのそれぞれから候補動きベクトルが導出されてもよい。そして、他の符号化対象ブロックについて、Col1ブロックから候補動きベクトルが導出されず、Col0ブロックから候補動きベクトルが導出されてもよい。
また、符号化対象ピクチャがBピクチャではなく、2つの参照ピクチャリストが定められていない場合、1つの参照ピクチャリストに含まれるco-locatedブロックから時間候補動きベクトルが導出されてもよい。
[ATMVPブロックから導出される候補動きベクトル]
図18A~図20Bの複数の例では、時間候補動きベクトルが、L0参照ピクチャリストに含まれるco-locatedブロック、及び、L1参照ピクチャリストに含まれるco-locatedブロックのそれぞれから導出される。これらの例におけるco-locatedブロックの代わりに、ATMVPブロックが用いられてもよい。
図18A~図20Bの複数の例では、時間候補動きベクトルが、L0参照ピクチャリストに含まれるco-locatedブロック、及び、L1参照ピクチャリストに含まれるco-locatedブロックのそれぞれから導出される。これらの例におけるco-locatedブロックの代わりに、ATMVPブロックが用いられてもよい。
つまり、時間候補動きベクトルは、L0参照ピクチャリストに含まれる参照ピクチャにおけるATMVPブロックと、L1参照ピクチャリストに含まれる参照ピクチャにおけるATMVPブロックとのそれぞれから導出されてもよい。ここでは、L0参照ピクチャリストに含まれる参照ピクチャにおけるATMVPブロックをAdv0ブロックと呼ぶ場合がある。また、L1参照ピクチャリストに含まれる参照ピクチャにおけるATMVPブロックをAdv1ブロックと呼ぶ場合がある。
すなわち、図18A~図20Bの複数の例におけるCol0ブロック及びCol1ブロックの代わりに、Adv0ブロック及びAdv1ブロックが用いられてもよい。
以下、図21A及び図21Bを用いて、時間候補動きベクトルが、Adv0ブロックとAdv1ブロックとのそれぞれから導出される例を説明する。具体的には、図21A及び図21Bの例では、図18A及び図18Bの例におけるCol0ブロック及びCol1ブロックの代わりに、Adv0ブロック及びAdv1ブロックが用いられている。
図21Aは、Adv0ブロックから導出される候補動きベクトルを示す概念図である。この例において、Adv0ブロックは、L0参照ピクチャリストの参照ピクチャL0[0]に含まれる。このようなAdv0ブロックは、符号化対象ブロックの暫定的な動きベクトルに従って、決定される。
例えば、候補リスト生成部134は、符号化対象ブロックに隣接する符号化済みのブロックの動きベクトルに従って、L0参照ピクチャリストの参照ピクチャL0[0]を参照する動きベクトルを符号化対象ブロックの暫定的な動きベクトルとして決定する。その際、候補リスト生成部134は、符号化対象ブロックに隣接する符号化済みの複数のブロックの中から、符号化対象ブロックの暫定的な動きベクトルを決定するためのブロックを符号化対象ブロックに対する相対的な位置に従って決定してもよい。
例えば、図11における符号化対象ブロックに対する隣接ブロックDの相対的な位置が、符号化対象ブロックの暫定的な動きベクトルを決定するための隣接ブロックの位置として、予め定められていてもよい。また、候補リスト生成部134は、図11における隣接ブロックD、A、B及びCの順で、インター予測の隣接ブロックを検索し、最初に見つかったインター予測の隣接ブロックを暫定的な動きベクトルを決定するための隣接ブロックに用いてもよい。
また、隣接ブロックの動きベクトルにスケーリングが適用され、スケーリングが適用された動きベクトルが符号化対象ブロックの暫定的な動きベクトルとして用いられてもよい。スケーリングには、符号化対象ピクチャから、隣接ブロックの動きベクトルが参照する参照ピクチャまでの時間差に対する、符号化対象ピクチャから、L0参照ピクチャリストに含まれる参照ピクチャL0[0]までの時間差の比率が用いられてもよい。
また、隣接ブロックの動きベクトルに負の比率のスケーリングが適用され、隣接ブロックの動きベクトルが反転されてもよい。そして、反転された動きベクトルが符号化対象ブロックの暫定的な動きベクトルとして用いられてもよい。これにより、隣接ブロックが前方向及び後方向のうち一方向のみを参照して符号化されている場合でも、適切な参照方向を参照する動きベクトルが、符号化対象ブロックの暫定的な動きベクトルとして用いられる。
そして、候補リスト生成部134は、符号化対象ブロックの暫定的な動きベクトルによって符号化対象ブロックからL0参照ピクチャリストに含まれる参照ピクチャL0[0]において指し示されるブロックをAdv0ブロックとして決定する。
図21Aの例において、候補リスト生成部134は、動きベクトルmvCurL0を符号化対象ブロックの暫定的な動きベクトルとして決定する。そして、候補リスト生成部134は、動きベクトルmvCurL0によって符号化対象ブロックからL0参照ピクチャリストに含まれる参照ピクチャL0[0]において指し示されるブロックをAdv0ブロックとして決定する。
動きベクトルmvCurL0は、例えば、図11に示された隣接ブロックDの動きベクトルであり、L0参照ピクチャリストに含まれる参照ピクチャL0[0]を参照する動きベクトルである。また、隣接ブロックDの動きベクトルにスケーリングが適用され、スケーリングが適用された動きベクトルが動きベクトルmvCurL0として用いられてもよい。例えば、参照ピクチャL0[0]を参照する動きベクトルmvCurL0が得られるように、隣接ブロックDの動きベクトルにスケーリングが適用されてもよい。
この例において、Adv0ブロックは、双予測で符号化されている。Adv0ブロックの双予測では、前方向の参照ピクチャL0[1]が動きベクトルmvAdv0L0によって参照されており、後方向の参照ピクチャL1[1]が動きベクトルmvAdv0L1によって参照されている。
そして、この例では、参照ピクチャL0[0]から参照ピクチャL1[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvAdv0L1がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvAdv0L1L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL0[0]から参照ピクチャL1[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvAdv0L1がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvAdv0L1L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Adv0ブロックの動きベクトルmvAdv0L1をスケーリングして、双予測に利用可能な2つの動きベクトルmvAdv0L1L0及びmvAdv0L1L1のそれぞれを時間候補動きベクトルとして導出する。
その他の説明について、図18Aの例におけるCol0ブロック、並びに、動きベクトルmvCol0L0及びmvCol0L1等は、図21Aの例におけるAdv0ブロック、並びに、動きベクトルmvAdv0L0及びmvAdv0L1等に置き換えられ得る。そのため、具体的な説明を省略する。
図21Bは、Adv1ブロックから導出される候補動きベクトルを示す概念図である。この例において、Adv1ブロックは、L1参照ピクチャリストの参照ピクチャL1[0]に含まれる。このようなAdv1ブロックは、符号化対象ブロックの暫定的な動きベクトルに従って、決定される。
例えば、候補リスト生成部134は、符号化対象ブロックに隣接する符号化済みのブロックの動きベクトルに従って、L1参照ピクチャリストの参照ピクチャL1[0]を参照する動きベクトルを符号化対象ブロックの暫定的な動きベクトルとして決定する。その際、候補リスト生成部134は、符号化対象ブロックに隣接する符号化済みの複数のブロックの中から、符号化対象ブロックの暫定的な動きベクトルを決定するためのブロックを符号化対象ブロックに対する相対的な位置に従って決定してもよい。
例えば、図11における符号化対象ブロックに対する隣接ブロックDの相対的な位置が、符号化対象ブロックの暫定的な動きベクトルを決定するための隣接ブロックの位置として、予め定められていてもよい。また、候補リスト生成部134は、図11における隣接ブロックD、A、B及びCの順で、インター予測の隣接ブロックを検索し、最初に見つかったインター予測の隣接ブロックを暫定的な動きベクトルを決定するための隣接ブロックに用いてもよい。
また、隣接ブロックの動きベクトルにスケーリングが適用され、スケーリングが適用された動きベクトルが符号化対象ブロックの暫定的な動きベクトルとして用いられてもよい。スケーリングには、符号化対象ピクチャから、隣接ブロックの動きベクトルが参照する参照ピクチャまでの時間差に対する、符号化対象ピクチャから、L1参照ピクチャリストに含まれる参照ピクチャL1[0]までの時間差の比率が用いられてもよい。
また、隣接ブロックの動きベクトルに負の比率のスケーリングが適用され、隣接ブロックの動きベクトルが反転されてもよい。そして、反転された動きベクトルが符号化対象ブロックの暫定的な動きベクトルとして用いられてもよい。これにより、隣接ブロックが前方向及び後方向のうち一方向のみを参照して符号化されている場合でも、適切な参照方向を参照する動きベクトルが、符号化対象ブロックの暫定的な動きベクトルとして用いられる。
そして、候補リスト生成部134は、符号化対象ブロックの暫定的な動きベクトルによって符号化対象ブロックからL1参照ピクチャリストに含まれる参照ピクチャL1[0]において指し示されるブロックをAdv1ブロックとして決定する。
図21Bの例において、候補リスト生成部134は、動きベクトルmvCurL1を符号化対象ブロックの暫定的な動きベクトルとして決定する。そして、候補リスト生成部134は、動きベクトルmvCurL1によって符号化対象ブロックからL1参照ピクチャリストに含まれる参照ピクチャL1[0]において指し示されるブロックをAdv1ブロックとして決定する。
動きベクトルmvCurL1は、例えば、図11に示された隣接ブロックDの動きベクトルであり、L1参照ピクチャリストに含まれる参照ピクチャL1[0]を参照する動きベクトルである。また、隣接ブロックDの動きベクトルにスケーリングが適用され、スケーリングが適用された動きベクトルが動きベクトルmvCurL1として用いられてもよい。例えば、参照ピクチャL1[0]を参照する動きベクトルmvCurL1が得られるように、隣接ブロックDの動きベクトルにスケーリングが適用されてもよい。
また、隣接ブロックDの同じ1つの動きベクトルから、2つの動きベクトルmvCurL0及びmvCurL1が導出されてもよい。あるいは、双予測で符号化された隣接ブロックDの2つの動きベクトルのうち、一方から動きベクトルmvCurL0が導出され、他方から動きベクトルmvCurL1が導出されてもよい。あるいは、隣接ブロックDの動きベクトルから動きベクトルmvCurL0が導出され、他の隣接ブロックA、B又はCの動きベクトルから動きベクトルmvCurL1が導出されてもよい。
この例において、Adv1ブロックは、双予測で符号化されている。Adv1ブロックの双予測では、前方向の参照ピクチャL0[1]が動きベクトルmvAdv1L0によって参照されており、後方向の参照ピクチャL1[1]が動きベクトルmvAdv1L1によって参照されている。
そして、この例では、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL0[0]までの時間差の比率で、動きベクトルmvAdv1L0がスケーリングされる。これにより、参照ピクチャL0[0]を参照する動きベクトルmvAdv1L0L0が時間候補動きベクトルとして導出される。
また、参照ピクチャL1[0]から参照ピクチャL0[1]までの時間差に対する、符号化対象ピクチャから参照ピクチャL1[0]までの時間差の比率で、動きベクトルmvAdv1L0がスケーリングされる。これにより、参照ピクチャL1[0]を参照する動きベクトルmvAdv1L0L1が時間候補動きベクトルとして導出される。
つまり、候補リスト生成部134は、Adv1ブロックの動きベクトルmvAdv1L0をスケーリングして、双予測に利用可能な2つの動きベクトルmvAdv1L0L0及びmvAdv1L0L1のそれぞれを時間候補動きベクトルとして導出する。
その他の説明について、図18Bの例におけるCol1ブロック、並びに、動きベクトルmvCol1L0及びmvCol1L1等は、図21Bの例におけるAdv1ブロック、並びに、動きベクトルmvAdv1L0及びmvAdv1L1等に置き換えられ得る。そのため、具体的な説明を省略する。
また、上述したように、図21A及び図21Bの例では、図18A及び図18Bの例におけるCol0ブロック及びCol1ブロックの代わりに、Adv0ブロック及びAdv1ブロックが用いられている。しかしながら、図19A~図20Bの例におけるCol0ブロック及びCol1ブロックの代わりに、Adv0ブロック及びAdv1ブロックが用いられてもよい。
したがって、図19A~図20Bの例におけるCol0ブロック及びCol1ブロック等が、Adv0ブロック及びAdv1ブロック等に置き換えられてもよい。また、図18A~図20Bの例におけるCol0ブロック及びCol1ブロック等に加えて、Adv0ブロック及びAdv1ブロック等が用いられてもよい。
上記の通り、L0参照ピクチャリストに含まれる参照ピクチャにおけるAdv0ブロック、及び、L1参照ピクチャリストに含まれる参照ピクチャにおけるAdv1ブロックのそれぞれから、候補動きベクトルが導出される。
例えば、符号化対象ブロックが移動物範囲の境界付近に位置する場合、オクルージョンによって、一方の参照ピクチャには、符号化対象ブロックに対応する領域が存在せず、他方の参照ピクチャには、符号化対象ブロックに対応する領域が存在する可能性がある。したがって、特に符号化対象ブロックが移動物範囲の境界付近に位置する場合、Adv0ブロック及びAdv1ブロックのそれぞれから候補動きベクトルが導出されることで、符号化対象ブロックに対応する領域から、適切な候補動きベクトルが導出され得る。
なお、全ての符号化対象ブロックについて、Adv0ブロック及びAdv1ブロックのそれぞれから候補動きベクトルが導出されなくてもよい。例えば、1つの符号化対象ブロックについて、Adv0ブロック及びAdv1ブロックのそれぞれから候補動きベクトルが導出されてもよい。そして、他の符号化対象ブロックについて、Adv1ブロックから候補動きベクトルが導出されず、Adv0ブロックから候補動きベクトルが導出されてもよい。
また、符号化対象ピクチャがBピクチャではなく、2つの参照ピクチャリストが定められていない場合、1つの参照ピクチャリストに含まれるATMVPブロックから時間候補動きベクトルが導出されてもよい。
[候補リスト]
図22は、複数の候補動きベクトルに関する複数のグループを示す概念図である。符号化対象ブロックの情報を符号化するための予測動きベクトルは、複数の候補動きベクトルのそれぞれに対応付けられたインデックスによって特定され得る。例えば、最大でN個の候補動きベクトルのそれぞれに対して、インデックスが対応付けられる。
図22は、複数の候補動きベクトルに関する複数のグループを示す概念図である。符号化対象ブロックの情報を符号化するための予測動きベクトルは、複数の候補動きベクトルのそれぞれに対応付けられたインデックスによって特定され得る。例えば、最大でN個の候補動きベクトルのそれぞれに対して、インデックスが対応付けられる。
複数の候補動きベクトルは、候補リストを構成する。複数の候補動きベクトルは、空間候補動きベクトルを含んでいてもよいし、時間候補動きベクトルを含んでいてもよいし、その他の候補動きベクトルを含んでいてもよい。すなわち、最大でN個の候補動きベクトルは、空間候補動きベクトルのグループと、時間候補動きベクトルのグループと、その他の候補動きベクトルのグループとを含み得る。
空間候補動きベクトルは、例えば、符号化対象ブロックと空間的に隣接するブロックから導出される候補動きベクトルである。空間候補動きベクトルは、符号化対象ブロックの近傍に位置し、符号化対象ブロックに隣接していないブロックから導出されてもよい。
時間候補動きベクトルは、符号化対象ピクチャとは異なる参照ピクチャに含まれるブロックから導出される候補動きベクトルである。例えば、時間候補動きベクトルは、Col0ブロック、Col1ブロック、Adv0ブロック又はAdv1ブロック等から導出され得る。
1つの符号化対象ブロックに対して、Col0ブロック及びCol1ブロックのそれぞれから、時間候補動きベクトルが導出されてもよい。そして、他の符号化対象ブロックに対して、Col0ブロック及びCol1ブロックの一方から、時間候補動きベクトルが導出されてもよい。
同様に、1つの符号化対象ブロックに対して、Adv0ブロック及びAdv1ブロックのそれぞれから、時間候補動きベクトルが導出されてもよい。そして、他の符号化対象ブロックに対して、Adv0ブロック及びAdv1ブロックの一方から、時間候補動きベクトルが導出されてもよい。
その他の候補動きベクトルは、空間候補動きベクトルとも時間候補動きベクトルとも異なる候補動きベクトルである。その他の候補動きベクトルは、それぞれが空間候補動きベクトル又は時間候補動きベクトルである複数の候補動きベクトルから導出されてもよい。例えば、複数の候補動きベクトルの平均値又は中央値が、その他の候補動きベクトルとして導出されてもよい。
また、予め定められた動きベクトルがその他の候補動きベクトルとして用いられてもよい。例えば、大きさがゼロである動きベクトルがその他の候補動きベクトルとして用いられてもよい。
また、シーケンス単位、ピクチャ単位、スライス単位、又は、1つ以上のブロックを含む所定の単位で、固定の候補動きベクトルが定められてもよい。
例えば、エントロピー符号化部110は、シーケンス単位の固定の候補動きベクトルをシーケンスパラメータセットに符号化してもよい。また、エントロピー符号化部110は、ピクチャ単位の固定の候補動きベクトルをピクチャパラメータセットに符号化してもよい。また、エントロピー符号化部110は、スライス単位の固定の候補動きベクトルをスライスヘッダに符号化してもよい。
そして、エントロピー復号部202は、シーケンス単位の固定の候補動きベクトルをシーケンスパラメータセットから復号してもよい。また、エントロピー復号部202は、ピクチャ単位の固定の候補動きベクトルをピクチャパラメータセットから復号してもよい。また、エントロピー復号部202は、スライス単位の固定の候補動きベクトルをスライスヘッダから復号してもよい。
例えば、画像全体が等速直線運動している場合、画像全体の動きを示す動きベクトルが固定の候補動きベクトルとしてシーケンスパラメータセット、ピクチャパラメータセット又はスライスヘッダ等のヘッダ情報に含められてもよい。また、画像全体が動いており、かつ、画像全体の動きとは異なる動きを有する物体が画像に含まれている場合、画像全体の動きを示す候補動きベクトルと、物体の動きを示す候補動きベクトルとが、ヘッダ情報に含められてもよい。
さらに、符号化装置100は、ピクチャ単位又はスライス単位等の候補動きベクトルを更新する場合、更新前の候補動きベクトルに対する差分を符号化してもよい。
また、候補動きベクトルの導出方法、インデックスの割り当て方法、及び、候補動きベクトルの最大個数は、シーケンス単位、ピクチャ単位、スライス単位、又は、1つ以上のブロックを含む所定の単位で定められてもよい。例えば、候補動きベクトルの導出方法等が、シーケンスパラメータセットによってシーケンス単位で定められてもよいし、ピクチャパラメータセットによってピクチャ単位で定められてもよいし、スライスヘッダによってスライス単位で定められてもよい。
例えば、符号化対象ブロックが移動物範囲の境界付近である場合、候補リスト生成部134は、Col0ブロック及びCol1ブロックのそれぞれから、時間候補動きベクトルを導出してもよい。あるいは、この場合、候補リスト生成部134は、Adv0ブロック及びAdv1ブロックのそれぞれから、時間候補動きベクトルを導出してもよい。
そして、符号化対象ブロックが移動物範囲の境界付近でない場合、候補リスト生成部134は、Col0ブロック及びCol1ブロックの一方から、時間候補動きベクトルを導出してもよい。あるいは、この場合、候補リスト生成部134は、Adv0ブロック及びAdv1ブロックの一方から、時間候補動きベクトルを導出してもよい。
候補リスト生成部134は、エッジ検出又は機械学習等を含む物体抽出技術に基づいて、符号化対象ブロックが移動物範囲の境界付近であるか否かを判定してもよい。あるいは、候補リスト生成部134は、画素毎の動き、又は、所定サイズの矩形領域毎の動きに基づいて、符号化対象ブロックが移動物範囲の境界付近であるか否かを判定してもよい。
また、候補リスト生成部134は、Col0ブロックの動きベクトルと、Col1ブロックの動きベクトルとの差分が閾値以上であるか否かを判定してもよい。そして、差分が閾値以上であれば、候補リスト生成部134は、Col0ブロックとCol1ブロックとのそれぞれから、時間候補動きベクトルを導出してもよい。一方、差分が閾値未満であれば、候補リスト生成部134は、Col0ブロックとCol1ブロックとのうち一方から時間候補動きベクトルを導出してもよい。
あるいは、候補リスト生成部134は、Adv0ブロックの動きベクトルと、Adv1ブロックの動きベクトルとの差分が閾値以上であれば、Adv0ブロックとAdv1ブロックとのそれぞれから、時間候補動きベクトルを導出してもよい。一方、差分が閾値未満であれば、候補リスト生成部134は、Adv0ブロックとAdv1ブロックとのうち一方から時間候補動きベクトルを導出してもよい。
空間候補動きベクトルの導出方法等も、時間候補動きベクトルと同様に、符号化対象ブロックが移動物範囲の境界付近であるか否かに従って、変更されてもよい。
例えば、符号化対象ブロックが移動物範囲の境界付近である場合、候補リスト生成部134は、複数の隣接ブロックのそれぞれから、空間候補動きベクトルを導出してもよい。そして、符号化対象ブロックが移動物範囲の境界付近でない場合、候補リスト生成部134は、複数の隣接ブロックのうちの1つから、空間候補動きベクトルを導出してもよい。
また、例えば、候補リスト生成部134は、2つの隣接ブロックの2つの動きベクトルの差分が閾値以上であるか否かを判定してもよい。そして、差分が閾値以上であれば、候補リスト生成部134は、2つの隣接ブロックのそれぞれから、空間候補動きベクトルを導出してもよい。一方、差分が閾値未満であれば、候補リスト生成部134は、2つの隣接ブロックのうちの1つから空間候補動きベクトルを導出してもよい。
また、インデックスの割り当て方法にグループが反映されてもよい。具体的には、候補リスト生成部134は、時間候補動きベクトル数及び空間候補動きベクトル数等に従って、複数の候補動きベクトルを複数のグループにグルーピングしてもよい。
例えば、候補リスト生成部134は、L0参照ピクチャリストに含まれるブロックと、L1参照ピクチャリストに含まれるブロックとのそれぞれから時間候補動きベクトルを導出するか否かに基づいて、時間候補動きベクトル数を特定してもよい。また、候補リスト生成部134は、符号化対象ブロックに隣接しないブロックからも空間候補動きベクトルを導出するか否かに基づいて、空間候補動きベクトル数を特定してもよい。
そして、候補リスト生成部134は、複数の候補動きベクトルのそれぞれについて、候補動きベクトルを含むグループの識別番号と、グループにおける候補動きベクトルのインデックス番号との組み合わせを候補動きベクトルのインデックスとして用いてもよい。
移動物範囲の境界付近の符号化対象ブロックについて、空間的及び時間的に広い範囲における各ブロックから、候補動きベクトルが導出されることにより、より適切な予測動きベクトルが選択され得る。例えば、上述した通り、L0参照ピクチャリストに含まれるブロック及びL1参照ピクチャリストに含まれるブロックのそれぞれから時間候補動きベクトルが導出されることにより、時間的に広い範囲における各ブロックから時間候補動きベクトルが導出される。これにより、より適切な予測動きベクトルが選択され得る。
さらに、2つの参照ピクチャリストのそれぞれについて、参照ピクチャインデックスが0である参照ピクチャに含まれるブロックに加えて、参照ピクチャインデックスが0でない参照ピクチャに含まれるブロックから、時間候補動きベクトルが導出されてもよい。これにより、時間的により広い範囲における各ブロックから、時間候補動きベクトルが導出され、より適切な予測動きベクトルが選択され得る。
また、co-locatedブロック又はATMVPブロックの周辺のブロックから、時間候補動きベクトルが導出されてもよい。ここで、ブロックの周辺の範囲は、ブロックから所定の距離の範囲であってもよいし、ブロックに隣接する1つ以上のブロックの範囲であってもよい。
また、例えば、移動物の範囲内である前景と、移動物の範囲外である背景とで、動きの差異が大きいと想定される。したがって、co-locatedブロック又はATMVPブロックの周辺の複数のブロックから、差異が大きい2つの動きベクトルが抽出されてもよい。そして、抽出された2つの動きベクトルが、前景及び背景の2つの動きベクトルとみなされてもよい。そして、抽出された2つの動きベクトルのそれぞれから、時間候補動きベクトルが導出されてもよい。
また、候補リスト生成部134は、co-locatedブロック又はATMVPブロックの周辺の複数のブロックの複数の動きベクトルのうち、互いに近い複数のブロックの互いに類似する複数の動きベクトルをグループ化してもよい。そして、候補リスト生成部134は、グループ毎に、グループに属する複数の動きベクトルの平均値又は中央値によって時間候補動きベクトルを導出してもよい。
上記において、各動きベクトルは、時間的距離に従って正規化されてもよい。すなわち、各動きベクトルは、符号化対象ピクチャから参照ピクチャL0[0]又はL1[0]を参照する動きベクトルにスケーリングされてもよい。
また、さらに、より適切な予測動きベクトルが得られるように、符号化対象ブロックに隣接する範囲よりも空間的に広い範囲における各ブロックから空間候補動きベクトルが導出されてもよい。例えば、符号化対象ブロックに隣接するブロックである隣接ブロックに加えて、隣接ブロックに隣接するブロックである再隣接ブロックが、空間候補動きベクトルの導出に用いられてもよい。
図23は、空間候補動きベクトルを導出するためのブロックを示す概念図である。図23の例では、隣接ブロックA、B、C及びDに加えて、隣接ブロックCに隣接するブロックである再隣接ブロックC1、C2及びC3の少なくとも1つから、空間候補動きベクトルが導出される。再隣接ブロックC1、C2及びC3のうち、空間候補動きベクトルの導出に用いられる再隣接ブロックは、固定されていてもよいし、適応的に切り替えられてもよい。
また、図23の例では、隣接ブロックCに対して再隣接ブロックC1、C2及びC3が定められているが、隣接ブロックA、B及びDに対して同様に再隣接ブロックが定められていてもよい。そして、隣接ブロックA、B、C及びDのうち、空間候補動きベクトルの導出に用いられる再隣接ブロックが定められる隣接ブロックは、固定されていてもよいし、適応的に切り替えられてもよい。
例えば、できるだけ空間的に広い範囲の動きがカバーされるように、隣接ブロックC及びDに対して、空間候補動きベクトルの導出に用いられる再隣接ブロックが定められてもよい。
また、符号化対象ブロックの角に接する隣接ブロックのみではなく、例えば隣接ブロックB及びCの間のブロックが空間候補動きベクトルの導出に用いられてもよい。このような中間のブロックの利用は、例えば符号化対象ブロックのサイズが16×16以上である場合のように、符号化対象ブロックのサイズが大きい場合に有効である。
符号化装置100は、空間候補動きベクトル及び時間候補動きベクトル等を含む複数の候補動きベクトルの中から、符号化対象ブロックの動きベクトルとして予測される動きベクトルである予測動きベクトルを選択する。符号化装置100は、各候補動きベクトルに基づく予測残差又はR-Dコストを算出し、複数の候補動きベクトルのうち、算出された予測残差又はR-Dコストが最も小さい候補動きベクトルを予測動きベクトルとして選択してもよい。
そして、符号化装置100は、予測動きベクトルを用いて、符号化対象ブロックの情報を符号化する。
例えば、符号化装置100は、符号化対象ブロックの動きベクトルと、予測動きベクトルとの差分動きベクトルを符号化してもよい。これにより、符号化装置100は、予測動きベクトルを用いて、符号化対象ブロックの動きベクトルを符号化してもよい。あるいは、符号化装置100は、符号化対象ブロックの画像と、予測動きベクトルに従って予測される画像との差分画像を符号化してもよい。これにより、符号化装置100は、予測動きベクトルを用いて、符号化対象ブロックの画像を符号化してもよい。
また、符号化装置100は、予測動きベクトルとして選択される候補動きベクトルに対応付けられたインデックスを複数の候補動きベクトルの中から予測動きベクトルを識別するための識別情報としてビットストリームに符号化してもよい。
そして、復号装置200は、ビットストリームからインデックスを復号してもよい。そして、復号装置200は、空間候補動きベクトル及び時間候補動きベクトル等を含む複数の候補動きベクトルの中から、復号されたインデックスに対応付けられた候補動きベクトルを予測動きベクトルとして選択してもよい。そして、復号装置200は、予測動きベクトルを用いて、復号対象ブロックの情報を復号する。
例えば、復号装置200は、差分動きベクトルを復号し、予測動きベクトルと差分動きベクトルとを加算してもよい。これにより、復号装置200は、予測動きベクトルを用いて、復号対象ブロックの動きベクトルを復号してもよい。あるいは、復号装置200は、差分画像を復号し、予測動きベクトルに従って予測される画像と、差分画像とを加算してもよい。これにより、復号装置200は、予測動きベクトルを用いて、復号対象ブロックの画像を復号してもよい。
また、例えば、符号化装置100は、予測動きベクトルのインデックスを符号化しなくてもよい。そして、復号装置200は、予測動きベクトルのインデックスを復号しなくてもよい。この場合、符号化装置100及び復号装置200において、FRUCにおけるテンプレートマッチング方式又はバイラテラルマッチング方式によって、予測動きベクトルが選択されてもよい。
すなわち、符号化装置100及び復号装置200は、複数の候補動きベクトルの中から予測動きベクトルを選択する際、複数の候補動きベクトルのそれぞれを評価してもよい。符号化装置100及び復号装置200は、複数の候補動きベクトルのうち最も高く評価された候補動きベクトルを予測動きベクトルとして選択してもよい。
例えば、符号化装置100及び復号装置200は、各候補動きベクトルの評価において、2つの比較対象領域を決定する。その際、符号化装置100及び復号装置200は、2つの比較対象領域のうち少なくとも一方を評価対象の候補動きベクトルに従って決定する。そして、符号化装置100及び復号装置200は、2つの比較対象領域の再構成画像間の適合度合いが高いほど、評価対象の候補動きベクトルをより高く評価する。
これにより、符号化装置100及び復号装置200は、複数の候補動きベクトルのそれぞれを同じように評価することができ、複数の候補動きベクトルの中から同じ予測動きベクトルを選択することができる。
例えば、候補動きベクトル数の増加に伴って、複数の候補動きベクトルの中から予測動きベクトルを識別するためのインデックスが大きくなり、インデックスの符号量が増加する可能性がある。しかしながら、FRUCでは、予測動きベクトルのインデックスが符号化されないため、候補動きベクトル数の増加に伴う符号量の増加が抑制される。
したがって、FRUCでは、より多くの空間候補動きベクトル及び時間候補動きベクトル等が導出されてもよい。これにより、符号化装置100及び復号装置200は、符号量の増加を抑制しつつ、予測精度を改善することができる。
また、候補リストは、L0参照ピクチャリストを参照する候補動きベクトルを含むL0参照用候補リストと、L1参照ピクチャリストを参照する候補動きベクトルを含むL1参照用候補リストとに分けられてもよい。
また、候補リストは、L0参照ピクチャリストを参照する候補動きベクトルと、L1参照ピクチャリストを参照する候補動きベクトルとの候補動きベクトルセットを含んでいてもよい。さらに、候補リストは、L0参照ピクチャリストを参照する候補動きベクトルの候補動きベクトルセットを含んでいてもよいし、L1参照ピクチャリストを参照する候補動きベクトルの候補動きベクトルセットを含んでいてもよい。
そして、候補リストに含まれる複数の候補動きベクトルセットの中から、1つの候補動きベクトルセットが予測動きベクトルセットとして選択されることにより、候補リストに含まれる複数の候補動きベクトルの中から予測動きベクトルが選択されてもよい。
[マッピングによって導出される候補動きベクトル]
候補リスト生成部134は、co-locatedブロック及びATMVPブロックの利用に代えて、又は、co-locatedブロック及びATMVPブロックの利用に加えて、参照ブロックのマッピングによって時間候補動きベクトルを導出してもよい。
候補リスト生成部134は、co-locatedブロック及びATMVPブロックの利用に代えて、又は、co-locatedブロック及びATMVPブロックの利用に加えて、参照ブロックのマッピングによって時間候補動きベクトルを導出してもよい。
例えば、候補リスト生成部134は、符号化対象ピクチャの処理開始時に、複数の参照ピクチャにおける複数の参照ブロックを符号化対象ピクチャにマッピングする。具体的には、候補リスト生成部134は、各参照ブロックを符号化対象ピクチャにおける対応領域にマッピングする。各対応領域は、マッピング領域とも表現され得る。
そして、候補リスト生成部134は、マッピングの結果に従って、符号化対象ピクチャの各ブロックについて、候補動きベクトルを導出する。具体的には、候補リスト生成部134は、符号化対象ピクチャにおけるブロックに重なる対応領域にマッピングされた参照ブロックの動きベクトルから、候補動きベクトルを導出する。
なお、このような候補動きベクトルの導出処理は、ピクチャ単位で行われてもよいし、ピクチャを分割することで得られるスライス単位で行われてもよいし、その他の領域単位で行われてもよい。
図24は、L0参照ピクチャリストに含まれる参照ブロック及びL1参照ピクチャリストに含まれる参照ブロックのマッピングを示す概念図である。例えば、候補リスト生成部134は、参照ピクチャL0[0]に含まれる参照ブロックBlk01の動きベクトルを正規化することにより、符号化対象ピクチャを参照する動きベクトルmvBlk01を導出する。
すなわち、候補リスト生成部134は、参照ブロックBlk01の動きベクトルをスケーリングすることにより、符号化対象ピクチャを参照する動きベクトルmvBlk01を導出する。このスケーリングには、参照ピクチャL0[0]から、参照ブロックBlk01の動きベクトルが参照する参照ピクチャまでの時間差に対する、参照ピクチャL0[0]から、符号化対象ピクチャまでの時間差の比率が用いられる。
そして、候補リスト生成部134は、動きベクトルmvBlk01に従って、参照ブロックBlk01を符号化対象ピクチャにおける対応領域Blk01cにマッピングする。つまり、候補リスト生成部134は、動きベクトルmvBlk01に従って、参照ブロックBlk01を符号化対象ピクチャにおける対応領域Blk01cに割り当てる。さらに言い換えれば、候補リスト生成部134は、動きベクトルmvBlk01に従って符号化対象ピクチャにおいて参照ブロックBlk01の対応領域Blk01cを特定する。
同様に、候補リスト生成部134は、参照ピクチャL0[0]に含まれる参照ブロックBlk02の動きベクトルを正規化することにより、符号化対象ピクチャを参照する動きベクトルmvBlk02を導出する。そして、候補リスト生成部134は、動きベクトルmvBlk02に従って、参照ブロックBlk02を符号化対象ピクチャにおける対応領域Blk02cにマッピングする。
同様に、候補リスト生成部134は、参照ピクチャL0[0]に含まれる参照ブロックBlk03の動きベクトルを正規化することにより、符号化対象ピクチャを参照する動きベクトルmvBlk03を導出する。そして、候補リスト生成部134は、動きベクトルmvBlk03に従って、参照ブロックBlk03を符号化対象ピクチャにおける対応領域Blk03cにマッピングする。
そして、候補リスト生成部134は、符号化対象ピクチャの各ブロックにマッピングされた参照ブロックの動きベクトルから、時間候補動きベクトルを導出する。
参照ピクチャL0[0]のみでは、対応領域Blk01cと対応領域Blk02cとの間の領域のように、参照ブロックがマッピングされない領域が存在する場合がある。そのため、候補リスト生成部134は、参照ピクチャL1[0]を用いる。
例えば、候補リスト生成部134は、参照ピクチャL1[0]に含まれる参照ブロックBlk11の動きベクトルを正規化することにより、符号化対象ピクチャを参照する動きベクトルmvBlk11を導出する。
すなわち、候補リスト生成部134は、参照ブロックBlk11の動きベクトルをスケーリングすることにより、符号化対象ピクチャを参照する動きベクトルmvBlk11を導出する。このスケーリングには、参照ピクチャL1[0]から、参照ブロックBlk11の動きベクトルが参照する参照ピクチャまでの時間差に対する、参照ピクチャL1[0]から、符号化対象ピクチャまでの時間差の比率が用いられる。
そして、候補リスト生成部134は、動きベクトルmvBlk11に従って、参照ブロックBlk11を符号化対象ピクチャにおける対応領域Blk11cにマッピングする。しかしながら、参照ピクチャL0[0]及び参照ピクチャL1[0]の両方が用いられた場合でも、空き領域が残る可能性がある。
図25は、空き領域を示す概念図である。候補リスト生成部134は、空き領域のブロックについて、周辺の動きベクトルから、時間候補動きベクトルを導出する。すなわち、候補リスト生成部134は、空き領域のブロックの周辺の領域にマッピングされた参照ブロックの動きベクトルから、時間候補動きベクトルを導出する。
具体的には、図25の例において、候補リスト生成部134は、空き領域の符号化対象ブロックについて、対応領域Blk11cの動きベクトル、及び、対応領域Blk02cの動きベクトルから、時間候補動きベクトルを導出する。例えば、候補リスト生成部134は、空き領域の符号化対象ブロックについて、対応領域Blk11cの動きベクトルと、対応領域Blk02cの動きベクトルとの内挿により、時間候補動きベクトルを導出してもよい。
あるいは、候補リスト生成部134は、内挿ではなく、対応領域Blk11cの動きベクトルと、対応領域Blk02cの動きベクトルとのうち、大きさの小さい動きベクトルにより、時間候補動きベクトルを導出してもよい。あるいは、候補リスト生成部134は、その他の選択方法で、対応領域Blk11cの動きベクトルと、対応領域Blk02cの動きベクトルとの中から選択された動きベクトルにより、時間候補動きベクトルを導出してもよい。
また、符号化対象ピクチャにおいて、空き領域のみではなく、重複領域が存在する可能性がある。すなわち、複数の参照ブロックがマッピングされた複数の対応領域が重複(オーバーラップ)する可能性がある。
図26は、重複領域を示す概念図である。この例では、参照ブロックBlk02が動きベクトルmvBlk02によって対応領域Blk02cにマッピングされ、参照ブロックBlk03が動きベクトルmvBlk03によって対応領域Blk03cにマッピングされている。そして、対応領域Blk02cと対応領域Blk03cとが部分的に重複している。このような重複領域に関する時間候補動きベクトルの詳細は、図28を用いて後述する。
図27は、符号化対象ブロック及び対応領域の例を示す概念図である。この例では、符号化対象ブロックに参照ブロックBlk01の対応領域Blk01cが重なっている。1つの参照ブロックの対応領域のみが符号化対象ブロックに重なる場合、候補リスト生成部134は、その1つの参照ブロックの動きベクトルから、符号化対象ブロックの予測動きベクトルに対する時間候補動きベクトルを導出する。
図27の例において、符号化対象ブロックは、参照ブロックBlk01の対応領域Blk01cの一部と、空き領域とを含み、その他の参照ブロックの対応領域を含まない。したがって、候補リスト生成部134は、参照ブロックBlk01の動きベクトルから、時間候補動きベクトルを導出する。
例えば、候補リスト生成部134は、参照ブロックBlk01の動きベクトルをスケーリングすることにより、符号化対象ブロックから参照ピクチャL0[0]を参照する時間候補動きベクトルを導出する。このスケーリングには、参照ピクチャL0[0]から、参照ブロックBlk01の動きベクトルが参照する参照ピクチャまでの時間差に対する、符号化対象ピクチャから、参照ピクチャL0[0]までの時間差の比率が用いられる。
なお、この時間候補動きベクトルは、参照ブロックBlk01の正規化された動きベクトルmvBlk01を反転することによっても得られる。
図28は、符号化対象ブロック及び2つの対応領域の例を示す概念図である。この例では、符号化対象ブロックに参照ブロックBlk02の対応領域Blk02cと参照ブロックBlk03の対応領域Blk03cとが重なっている。複数のブロックの複数の対応領域が符号化対象ブロックに重なる場合、候補リスト生成部134は、符号化対象ブロックに占める面積が最大の対応領域にマッピングされた参照ブロックの動きベクトルから、時間候補動きベクトルを導出する。
図28の例では、符号化対象ブロックにおいて、参照ブロックBlk03の対応領域Blk03cが占める面積が、参照ブロックBlk02の対応領域Blk02cが占める面積よりも大きい。したがって、候補リスト生成部134は、参照ブロックBlk03の動きベクトルから、時間候補動きベクトルを導出する。
あるいは、候補リスト生成部134は、符号化対象ブロックに重なる複数の対応領域に対応する複数のブロックの複数の動きベクトルの平均値、中央値、最大値又は最小値によって、時間候補動きベクトルを導出してもよい。また、候補リスト生成部134は、符号化対象ブロックに重なる各対応領域が占める面積に従って、複数の対応領域に対応する複数の動きベクトルを重み付けし、複数の動きベクトルの重み付け平均値によって時間候補動きベクトルを導出してもよい。
例えば、複数の動きベクトルの平均値、中央値、最大値、最小値、又は、重み付け平均値が用いられる場合、時間的距離に従って正規化された複数の動きベクトルの平均値、中央値、最大値、最小値、又は、重み付け平均値が用いられてもよい。つまり、それぞれが符号化対象ピクチャから参照ピクチャL0[0]又はL1[0]を参照する動きベクトルにスケーリングされた複数の動きベクトルの平均値、中央値、最大値、最小値、又は、重み付け平均値が用いられてもよい。
あるいは、候補リスト生成部134は、符号化対象ブロックに重なる複数の対応領域にマッピングされた複数の参照ブロックの複数の動きベクトルのそれぞれから、時間候補動きベクトルを導出してもよい。この場合、時間候補動きベクトル数の上限が予め定められていてもよい。
例えば、FRUCでは、上述した通り、予測動きベクトルのインデックスが符号化されないため、候補動きベクトル数の増加に伴う符号量の増加が抑制される。したがって、符号化対象ブロックに重なる複数の対応領域にマッピングされた複数の参照ブロックの複数の動きベクトルのそれぞれから時間候補動きベクトルが導出されても、時間候補動きベクトル数の増加に伴う符号量の増加は抑制される。よって、時間候補動きベクトル数の上限は、処理負荷の増加を抑制するため、予め定められていてもよい。
図29は、符号化対象ブロック、複数の隣接ブロック及び複数の対応領域の例を示す概念図である。符号化対象ブロックが、参照ブロックの対応領域を含まず、空き領域で構成されている場合、候補リスト生成部134は、符号化対象ブロックの周辺ブロックの動きベクトルによって、時間候補動きベクトルを導出する。つまり、この場合、候補リスト生成部134は、符号化対象ブロックの周辺の対応領域にマッピングされた参照ブロックの動きベクトルから、時間候補動きベクトルを導出する。
例えば、候補リスト生成部134は、符号化対象ブロックの右に隣接する第1隣接ブロックに重なる対応領域Blk01cにマッピングされた参照ブロックBlk01の動きベクトルから、時間候補動きベクトルを導出する。
また、候補リスト生成部134は、第1隣接ブロック、第2隣接ブロック及び第3隣接ブロック等を含む複数の隣接ブロックのそれぞれが空き領域であるか否かを予め定められた順序で判定してもよい。そして、候補リスト生成部134は、空き領域でないと最初に判定された隣接ブロックに重なる対応領域にマッピングされた参照ブロックの動きベクトルから、時間候補動きベクトルを導出してもよい。
あるいは、候補リスト生成部134は、符号化対象ブロックの周辺の複数の対応領域にマッピングされた複数の参照ブロックの複数の動きベクトルを符号化対象ブロックから各対応領域までの空間的な距離に従って重み付けしてもよい。そして、候補リスト生成部134は、複数の動きベクトルの重み付け平均値によって時間候補動きベクトルを導出してもよい。
例えば、複数の動きベクトルの重み付け平均値が用いられる場合、時間的距離に従って正規化された複数の動きベクトルの重み付け平均値が用いられてもよい。つまり、それぞれが符号化対象ピクチャから参照ピクチャL0[0]又はL1[0]を参照する動きベクトルにスケーリングされた複数の動きベクトルの重み付け平均値が用いられてもよい。
図30は、符号化単位として定められるブロック、及び、所定のサイズで定められるサブブロックを示す概念図である。所定のサイズは、例えば、M×N画素のサイズとして定められる。具体的には、符号化単位として16×16画素のサイズで定められたブロックにおいて、4×4画素のサイズで16個のサブブロックが定められてもよい。
符号化対象ブロックは、符号化単位として定められるブロックであってもよいし、符号化単位として定められるブロックにおいて所定のサイズで定められるサブブロックであってもよい。同様に、参照ブロックも、符号化単位として定められるブロックであってもよいし、符号化単位として定められるブロックにおいて所定のサイズで定められるサブブロックであってもよい。
すなわち、候補リスト生成部134は、符号化単位として定められるブロック毎に、候補動きベクトルを導出してもよいし、所定のサイズで定められるサブブロック毎に、候補動きベクトルを導出してもよい。そして、インター予測部126は、符号化単位として定められるブロック毎に、予測動きベクトルを選択して予測を行ってもよいし、所定のサイズで定められるサブブロック毎に、予測動きベクトルを選択して予測を行ってもよい。
例えば、符号化単位のブロックにおいて前景と背景とが混在している場合がある。このような場合、候補リスト生成部134は、サブブロック毎に処理を行うことにより、前景に属するサブブロックと、背景に属するサブブロックとのそれぞれの動きに適合する候補動きベクトルを導出することができる。そして、インター予測部126は、サブブロック毎に処理を行うことにより、前景に属するサブブロックと、背景に属するサブブロックとのそれぞれの動きに適合する予測動きベクトルを選択して予測を行うことができる。
また、候補リスト生成部134は、空き領域のサブブロックに対して時間候補動きベクトルを導出する際、空き領域のサブブロックを含む同一ブロック内の他のサブブロックに対応する動きベクトルから、時間候補動きベクトルを導出してもよい。すなわち、候補リスト生成部134は、符号化単位の範囲外にマッピングされた参照ブロックの動きベクトルを用いず、符号化単位の範囲をサブブロックの周辺の範囲として用いてもよい。これにより、候補リスト生成部134は、参照範囲を適切に制限することができる。
なお、サブブロック毎に候補動きベクトルを導出し予測動きベクトルを選択する動作は、2つの参照ピクチャリストのそれぞれにおけるco-locatedブロック又はATMVPブロックを用いる方法にも適用され得る。
また、サブブロック毎に候補動きベクトルを導出し予測動きベクトルを選択する動作がFRUCの処理として行われてもよい。すなわち、FRUCにおけるテンプレートマッチング方式又はバイラテラルマッチング方式に従って、サブブロック毎に、複数の候補動きベクトルの中から、予測動きベクトルが選択されてもよい。
例えば、サブブロック毎に予測動きベクトルが選択された場合、符号化単位あたりの予測動きベクトルの個数が増加する。これにより、予測動きベクトルのインデックスの個数も増加し、符号量が増加する可能性がある。しかしながら、FRUCでは、予測動きベクトルのインデックスが符号化されないため、予測動きベクトルの個数の増加に伴う符号量の増加が抑制される。
また、候補リスト生成部134は、参照ブロックのマッピングによって候補動きベクトルを導出する際、co-locatedブロック又はATMVPブロックを用いる方法と同様に、1つの参照ブロックから2つ以上の候補動きベクトルを導出してもよい。
具体的には、候補リスト生成部134は、参照ブロックの1つの動きベクトルから双予測に利用可能な2つの候補動きベクトルを導出してもよいし、参照ブロックの2つの動きベクトルから双予測に利用可能な2つの候補動きベクトルを導出してもよい。また、候補リスト生成部134は、参照ブロックの2つの動きベクトルのそれぞれから双予測に利用可能な2つの候補動きベクトルを導出することにより、参照ブロックの2つの動きベクトルから4つの候補動きベクトルを導出してもよい。
また、参照ブロックが双予測で符号化されている場合、候補リスト生成部134は、参照ブロックの2つの動きベクトルに従って、参照ブロックを符号化対象ピクチャにおける2つの対応領域にマッピングしてもよい。
また、候補リスト生成部134は、参照ピクチャインデックスが0である参照ピクチャに限らず、その他の参照ピクチャの参照ブロックを参照ブロックの動きベクトルに従って符号化対象ピクチャにおける対応領域にマッピングしてもよい。
例えば、参照ピクチャL0[0]及びL1[0]の複数の参照ブロックに代えて、参照ピクチャL0[1]及びL1[1]の複数の参照ブロックがマッピングに用いられてもよい。あるいは、参照ピクチャL0[0]及びL1[0]の複数の参照ブロックに加えて、参照ピクチャL0[1]及びL1[1]の複数の参照ブロックがマッピングに用いられてもよい。
[符号化装置の実装例]
図31は、実施の形態1に係る符号化装置100の実装例を示すブロック図である。符号化装置100は、回路160及びメモリ162を備える。例えば、図1及び図16に示された符号化装置100の複数の構成要素は、図31に示された回路160及びメモリ162によって実装される。
図31は、実施の形態1に係る符号化装置100の実装例を示すブロック図である。符号化装置100は、回路160及びメモリ162を備える。例えば、図1及び図16に示された符号化装置100の複数の構成要素は、図31に示された回路160及びメモリ162によって実装される。
回路160は、情報処理を行う回路であり、メモリ162にアクセス可能な回路である。例えば、回路160は、動画像を符号化する専用又は汎用の電子回路である。回路160は、CPUのようなプロセッサであってもよい。また、回路160は、複数の電子回路の集合体であってもよい。また、例えば、回路160は、図1等に示された符号化装置100の複数の構成要素のうち、情報を記憶するための構成要素を除く、複数の構成要素の役割を果たしてもよい。
メモリ162は、回路160が動画像を符号化するための情報が記憶される汎用又は専用のメモリである。メモリ162は、電子回路であってもよく、回路160に接続されていてもよい。また、メモリ162は、回路160に含まれていてもよい。また、メモリ162は、複数の電子回路の集合体であってもよい。また、メモリ162は、磁気ディスク又は光ディスク等であってもよいし、ストレージ又は記録媒体等と表現されてもよい。また、メモリ162は、不揮発性メモリでもよいし、揮発性メモリでもよい。
例えば、メモリ162には、符号化される動画像が記憶されてもよいし、符号化された動画像に対応するビット列が記憶されてもよい。また、メモリ162には、回路160が動画像を符号化するためのプログラムが記憶されていてもよい。
また、例えば、メモリ162は、図1等に示された符号化装置100の複数の構成要素のうち、情報を記憶するための構成要素の役割を果たしてもよい。具体的には、メモリ162は、図16に示されたブロックメモリ118、フレームメモリ122及び候補ブロック情報メモリ136の役割を果たしてもよい。より具体的には、メモリ162には、再構成済みブロック、再構成済みピクチャ、及び、インター予測に用いられた動きベクトル等が記憶されてもよい。
なお、符号化装置100において、図1等に示された複数の構成要素の全てが実装されなくてもよいし、上述された複数の処理の全てが行われなくてもよい。図1等に示された複数の構成要素の一部は、他の装置に含まれていてもよいし、上述された複数の処理の一部は、他の装置によって実行されてもよい。そして、符号化装置100において、図1等に示された複数の構成要素のうちの一部が実装され、上述された複数の処理の一部が行われることによって、少ない符号量で動画像が適切に処理され得る。
図32Aは、動画像の符号化時における候補動きベクトルの導出に関する第1動作例を示すフローチャートである。図31に示された符号化装置100は、動画像を符号化する際、図32Aに示された動作を行ってもよい。
具体的には、符号化装置100の回路160は、第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S101)。ここで、第1参照ブロックは、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれるブロックである。
また、回路160は、第2参照ブロックの1つ以上の動きベクトルから、予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S102)。ここで、第2参照ブロックは、双予測のための2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれるブロックである。
そして、回路160は、複数の候補動きベクトルの中から、予測動きベクトルを選択する(S103)。ここで、複数の候補動きベクトルは、第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む。そして、回路160は、予測動きベクトルを用いて、符号化対象ブロックの情報を符号化する(S104)。
これにより、符号化装置100は、第1参照ピクチャリストにおける第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ピクチャリストにおける第2参照ブロックから候補動きベクトルを導出することができる。したがって、符号化装置100は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。
そして、これにより、符号化装置100は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
例えば、第1参照ブロックが双予測で符号化されている場合、回路160は、第1参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第1参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、第2参照ブロックが双予測で符号化されている場合、回路160は、第2参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第2参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置100は、第1参照ブロックの1つの動きベクトルと、第2参照ブロックの1つの動きベクトルとのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルを含む候補動きベクトルセットを導出することができる。すなわち、符号化装置100は、特性が異なる2つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される2組の候補動きベクトルセットを導出することができる。
また、例えば、第1参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化されている場合、回路160は、第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、第2参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化されている場合、回路160は、第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置100は、特性が類似すると想定される2つの動きベクトルのうち1つの動きベクトルのみから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。したがって、符号化装置100は、処理効率を改善することができる。
また、例えば、第1参照ブロックが双予測で符号化されている場合、回路160は、第1参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第1参照ブロックの2つの動きベクトルから、第1参照ピクチャリストを参照するための2つの候補動きベクトルと、第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出してもよい。
また、第2参照ブロックが双予測で符号化されている場合、回路160は、第2参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第2参照ブロックの2つの動きベクトルから、第1参照ピクチャリストを参照するための2つの候補動きベクトルと、第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出してもよい。
これにより、符号化装置100は、2つの参照ブロックの4つの動きベクトルのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、符号化装置100は、2つの参照ブロックの4つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される4組の候補動きベクトルセットを導出することができる。
また、例えば、第1参照ブロックが双予測で符号化されている場合、回路160は、第1参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。そして、この場合、回路160は、第1参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、第2参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。
また、第2参照ブロックが双予測で符号化されている場合、回路160は、第2参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。そして、この場合、回路160は、第2参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、第2参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。
これにより、符号化装置100は、2つの参照ブロックの4つの動きベクトルからそれぞれ4つの候補動きベクトルを導出することができ、4つの候補動きベクトルで構成される2組の候補動きベクトルセットを導出することができる。すなわち、符号化装置100は、2つの参照ブロックの4つの動きベクトルを2組の候補動きベクトルセットに含まれる4つの候補動きベクトルにそれぞれ適切に反映させることができる。
また、例えば、第1参照ブロックが単予測で符号化されている場合、回路160は、第1参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第1参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、第2参照ブロックが単予測で符号化されている場合、回路160は、第2参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第2参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置100は、各参照ブロックの1つのみの動きベクトルから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、符号化装置100は、各参照ブロックの1つのみの動きベクトルから、双予測に利用可能な2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。
また、例えば、符号化対象ブロックは、表示順で前方向及び後方向のうち一方向のみの双予測で符号化されてもよい。この場合、回路160は、第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの双予測に用いられる一方向を参照するための2つ以上の候補動きベクトルを導出してもよい。そして、この場合、回路160は、第2参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの双予測に用いられる一方向を参照するための2つ以上の候補動きベクトルを導出してもよい。
これにより、符号化装置100は、符号化対象ブロックに一方向のみの双予測が用いられる場合、各参照ブロックから、一方向を参照する2つ以上の候補動きベクトルを導出することができる。したがって、符号化装置100は、各参照ブロックから、一方向のみの双予測に適切な1組以上の候補動きベクトルセットを導出することができる。
また、例えば、第1参照ピクチャリストは、表示順で前方向を参照するための参照ピクチャリストであってもよい。第2参照ピクチャリストは、表示順で後方向を参照するための参照ピクチャリストであってもよい。第1参照ブロックは、表示順で前方向及び後方向の両方向の双予測で符号化されていてもよい。第2参照ブロックは、表示順で前方向及び後方向の両方向の双予測で符号化されていてもよい。符号化対象ブロックは、表示順で前方向及び後方向の両方向の双予測で符号化されてもよい。
この場合、回路160は、第1参照ブロックの2つの動きベクトルのうち表示順で後方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第1参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、この場合、回路160は、第2参照ブロックの2つの動きベクトルのうち表示順で前方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路160は、第2参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、符号化装置100は、各参照ブロックの2つの動きベクトルのうち、時間的に参照ブロックから符号化対象ブロックへ向かう参照方向の動きベクトルから、2つの参照ピクチャリストを参照する候補動きベクトルセットを導出することができる。すなわち、符号化装置100は、各参照ブロックの2つの動きベクトルのうち、符号化対象ブロックに対して時間的に関連が強い動きベクトルから、双予測に利用可能な候補動きベクトルセットを適切に導出することができる。
また、例えば、第1参照ブロックの空間的な位置は、符号化対象ブロックの空間的な位置と同じであってもよいし、第2参照ブロックの空間的な位置は、符号化対象ブロックの空間的な位置と同じであってもよい。
図32Bは、動画像の符号化時における候補動きベクトルの導出に関する第2動作例を示すフローチャートである。図31に示された符号化装置100は、動画像を符号化する際、図32Bに示された動作を行ってもよい。
具体的には、符号化装置100の回路160は、符号化対象ブロックに空間的に隣接する第1隣接ブロックの第1動きベクトルを用いて、第1参照ピクチャに含まれる第1参照ブロックを特定する(S201)。ここで、第1参照ピクチャは、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成するピクチャである。そして、回路160は、第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S202)。
また、回路160は、第1動きベクトル、第1隣接ブロックの第2動きベクトル、又は、符号化対象ブロックに空間的に隣接する第2隣接ブロックの第3動きベクトルを用いて、第2参照ピクチャに含まれる第2参照ブロックを特定する(S203)。ここで、第2参照ピクチャは、2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成するピクチャである。そして、回路160は、第2参照ブロックの1つ以上の動きベクトルから、予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S204)。
そして、回路160は、複数の候補動きベクトルの中から、予測動きベクトルを選択する(S205)。ここで、複数の候補動きベクトルは、第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む。そして、回路160は、予測動きベクトルを用いて、符号化対象ブロックの情報を符号化する(S206)。
これにより、符号化装置100は、1つ以上の隣接ブロックの1つ以上の動きベクトルを用いて、第1参照ピクチャリストにおける第1参照ブロック、及び、第2参照ピクチャリストにおける第2参照ブロックを特定することができる。すなわち、符号化装置100は、1つ以上の隣接ブロックの1つ以上の動きベクトルを用いて、符号化対象ブロックに対して関連が強いと想定される第1参照ブロック及び第2参照ブロックを特定することができる。
そして、符号化装置100は、第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ブロックから候補動きベクトルを導出することができる。したがって、符号化装置100は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。そして、これにより、符号化装置100は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
また、図32Bに示された第2動作例において、図32Aを用いて説明された変形例又は具体例が適用されてもよい。
なお、図32Bに示された第2動作例は、図32Aに示された動作例における第1参照ブロック及び第2参照ブロックのそれぞれがATMVPブロックである場合の例である。図32Aに示された第1動作例における第1参照ブロック及び第2参照ブロックのそれぞれは、ATMVPブロックではなく、co-locatedブロックであってもよい。
具体的には、図32Aに示された第1動作例における第1参照ブロックは、第1参照ピクチャにおいて符号化対象ブロックと位置が同じブロックであってもよい。そして、図32Aに示された第1動作例における第2参照ブロックは、第2参照ピクチャにおいて符号化対象ブロックと位置が同じブロックであってもよい。
図32Cは、動画像の符号化時における候補動きベクトルの導出に関する第3動作例を示すフローチャートである。図31に示された符号化装置100は、動画像を符号化する際、図32Cに示された動作を行ってもよい。
具体的には、符号化装置100の回路160は、複数の参照ブロックのそれぞれを当該参照ブロックの動きベクトルに従って符号化対象画像における対応領域にマッピングする(S301)。
ここで、複数の参照ブロックは、第1参照ピクチャに含まれる1つ以上の参照ブロックと、第2参照ピクチャに含まれる1つ以上の参照ブロックとを含む。第1参照ピクチャは、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成するピクチャである。第2参照ピクチャは、2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成するピクチャである。
そして、対応領域が符号化対象画像における符号化対象ブロックに重なる場合、回路160は、対応領域にマッピングされた参照ブロックの動きベクトルから、複数の候補動きベクトルの1つとして候補動きベクトルを導出する(S302)。この複数の候補動きベクトルは、符号化対象ブロックの予測動きベクトルに対する複数の候補動きベクトルである。
そして、回路160は、複数の候補動きベクトルの中から、予測動きベクトルを選択する(S303)。そして、回路160は、予測動きベクトルを用いて、符号化対象ブロックの情報を符号化する(S304)。
これにより、符号化装置100は、第1参照ピクチャリスト及び第2参照ピクチャリストにおける複数の参照ブロックのうち、符号化対象ブロックに対して関連が強いと想定される参照ブロックから、適切な候補動きベクトルを導出することができる。したがって、符号化装置100は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。
そして、これにより、符号化装置100は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
例えば、回路160は、第1参照ピクチャにおける1つ以上の参照ブロックのそれぞれを符号化対象画像においてマッピングしてもよい。その後、回路160は、第2参照ピクチャにおける1つ以上の参照ブロックのそれぞれを符号化対象画像のうち第1参照ピクチャにおける1つ以上の参照ブロックがマッピングされていない空き領域においてマッピングしてもよい。
これにより、符号化装置100は、第2参照ピクチャリストにおける1つ以上の参照ブロックよりも、第1参照ピクチャリストにおける1つ以上の参照ブロックを優先してマッピングすることができる。第1参照ピクチャリストにおける参照ブロックの動きベクトルの信頼性が、第2参照ピクチャリストにおける参照ブロックの動きベクトルの信頼性よりも高い場合がある。このような場合に、符号化装置100は、信頼性がより高い動きベクトルに従って、適切な候補動きベクトルを導出することができる。
また、例えば、複数の参照ブロックのうちの2つ以上の参照ブロックがマッピングされた2つ以上の対応領域が符号化対象ブロックに重なってもよい。この場合、回路160は、2つ以上の参照ブロックの2つ以上の動きベクトルのうちの少なくとも1つの動きベクトルから候補動きベクトルを導出してもよい。
これにより、符号化装置100は、符号化対象ブロックに対して関連が強いと想定される複数の参照ブロックのうち少なくとも1つの参照ブロックから、適切な候補動きベクトルを導出することができる。
また、例えば、符号化対象ブロックに重なる対応領域が存在せず、符号化対象ブロックの周辺領域に重なる対応領域が存在してもよい。この場合、回路160は、周辺領域に重なる対応領域にマッピングされた参照ブロックの動きベクトルから、候補動きベクトルを導出してもよい。
これにより、符号化装置100は、符号化対象ブロックにおいて参照ブロックがマッピングされていなくても、符号化対象ブロックの周辺においてマッピングされた参照ブロックの動きベクトルに従って、適切な候補動きベクトルを導出することができる。
また、例えば、回路160は、複数の候補動きベクトルの中から予測動きベクトルを選択する際、複数の候補動きベクトルのそれぞれを評価し、複数の候補動きベクトルのうち最も高く評価された候補動きベクトルを予測動きベクトルとして選択してもよい。
回路160は、複数の候補動きベクトルのそれぞれを評価する際、2つの比較対象領域の再構成画像間の適合度合いが高いほど、評価対象の候補動きベクトルをより高く評価してもよい。ここで、2つの比較対象領域は、符号化対象ブロックとは異なる2つの領域であり、少なくとも一方が評価対象の候補動きベクトルに従って定められる2つの領域である。
これにより、符号化装置100は、符号化対象ブロックとは異なる領域の再構成画像を参照して各候補動きベクトルを評価し、複数の候補動きベクトルの中から予測動きベクトルを選択することができる。したがって、符号化装置100と復号装置200とが、同じ方法で、複数の候補動きベクトルの中から予測動きベクトルを選択することができる。よって、符号化装置100は、予測動きベクトルを選択するための情報の符号化を省くことができ、符号量の削減を支援することができる。
また、例えば、回路160は、対応領域にマッピングされた参照ブロックの動きベクトルから候補動きベクトルを導出する際、スケーリング比率が適用された、参照ブロックの動きベクトルを候補動きベクトルとして導出してもよい。
ここで、スケーリング比率は、参照ブロックを含む参照ピクチャから、参照ブロックの動きベクトルが指し示す参照領域を含む参照ピクチャまでの時間差に対する、符号化対象ピクチャから、参照ブロックを含む参照ピクチャまでの時間差の比率である。符号化対象ピクチャは、符号化対象画像を含むピクチャである。
これにより、符号化装置100は、参照ブロックの動きベクトルを適切にスケーリングすることができ、スケーリングされた動きベクトルを候補動きベクトルとして導出することができる。
また、例えば、符号化対象ブロックは、符号化単位として定められるブロックであってもよいし、符号化単位として定められるブロックにおいて所定のサイズで定められるサブブロックであってもよい。これにより、符号化装置100は、符号化単位のブロック、又は、符号化単位のブロック内のサブブロックについて、適切な候補動きベクトルを導出することができる。
また、例えば、回路160は、符号化対象画像における複数の符号化対象ブロックのそれぞれについて、当該符号化対象ブロックに対応領域が重なる場合、対応領域にマッピングされた参照ブロックの動きベクトルから、候補動きベクトルを導出してもよい。この候補動きベクトルは、当該符号化対象ブロックの予測動きベクトルに対する候補動きベクトルである。
これにより、符号化装置100は、符号化対象画像における各符号化対象ブロックについて、適切な候補動きベクトルを導出することができる。
[復号装置の実装例]
図33は、実施の形態1に係る復号装置200の実装例を示すブロック図である。復号装置200は、回路260及びメモリ262を備える。例えば、図10及び図17に示された復号装置200の複数の構成要素は、図33に示された回路260及びメモリ262によって実装される。
図33は、実施の形態1に係る復号装置200の実装例を示すブロック図である。復号装置200は、回路260及びメモリ262を備える。例えば、図10及び図17に示された復号装置200の複数の構成要素は、図33に示された回路260及びメモリ262によって実装される。
回路260は、情報処理を行う回路であり、メモリ262にアクセス可能な回路である。例えば、回路260は、動画像を復号する汎用又は専用の電子回路である。回路260は、CPUのようなプロセッサであってもよい。また、回路260は、複数の電子回路の集合体であってもよい。また、例えば、回路260は、図10等に示された復号装置200の複数の構成要素のうち、情報を記憶するための構成要素を除く、複数の構成要素の役割を果たしてもよい。
メモリ262は、回路260が動画像を復号するための情報が記憶される汎用又は専用のメモリである。メモリ262は、電子回路であってもよく、回路260に接続されていてもよい。また、メモリ262は、回路260に含まれていてもよい。また、メモリ262は、複数の電子回路の集合体であってもよい。また、メモリ262は、磁気ディスク又は光ディスク等であってもよいし、ストレージ又は記録媒体等と表現されてもよい。また、メモリ262は、不揮発性メモリでもよいし、揮発性メモリでもよい。
例えば、メモリ262には、符号化された動画像に対応するビット列が記憶されてもよいし、復号されたビット列に対応する動画像が記憶されてもよい。また、メモリ262には、回路260が動画像を復号するためのプログラムが記憶されていてもよい。
また、例えば、メモリ262は、図10等に示された復号装置200の複数の構成要素のうち、情報を記憶するための構成要素の役割を果たしてもよい。具体的には、メモリ262は、図17に示されたブロックメモリ210、フレームメモリ214及び候補ブロック情報メモリ236の役割を果たしてもよい。より具体的には、メモリ262には、再構成済みブロック、再構成済みピクチャ、及び、インター予測に用いられた動きベクトル等が記憶されてもよい。
なお、復号装置200において、図10等に示された複数の構成要素の全てが実装されなくてもよいし、上述された複数の処理の全てが行われなくてもよい。図10等に示された複数の構成要素の一部は、他の装置に含まれていてもよいし、上述された複数の処理の一部は、他の装置によって実行されてもよい。そして、復号装置200において、図10等に示された複数の構成要素のうちの一部が実装され、上述された複数の処理の一部が行われることによって、少ない符号量で動画像が適切に処理され得る。
図34Aは、動画像の復号時における候補動きベクトルの導出に関する第1動作例を示すフローチャートである。図33に示された復号装置200は、動画像を復号する際、図34Aに示された動作を行ってもよい。
具体的には、復号装置200の回路260は、第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S401)。ここで、第1参照ブロックは、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれるブロックである。
また、回路260は、第2参照ブロックの1つ以上の動きベクトルから、予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S402)。ここで、第2参照ブロックは、双予測のための2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれるブロックである。
そして、回路260は、複数の候補動きベクトルの中から、予測動きベクトルを選択する(S403)。ここで、複数の候補動きベクトルは、第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む。そして、回路260は、予測動きベクトルを用いて、復号対象ブロックの情報を復号する(S404)。
これにより、復号装置200は、第1参照ピクチャリストにおける第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ピクチャリストにおける第2参照ブロックから候補動きベクトルを導出することができる。したがって、復号装置200は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。
そして、これにより、復号装置200は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
例えば、第1参照ブロックが双予測で復号されている場合、回路260は、第1参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第1参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、第2参照ブロックが双予測で復号されている場合、回路260は、第2参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第2参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置200は、第1参照ブロックの1つの動きベクトルと、第2参照ブロックの1つの動きベクトルとのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルを含む候補動きベクトルセットを導出することができる。すなわち、復号装置200は、特性が異なる2つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される2組の候補動きベクトルセットを導出することができる。
また、例えば、第1参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号されている場合、回路260は、第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、第2参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号されている場合、回路260は、第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置200は、特性が類似すると想定される2つの動きベクトルのうち1つの動きベクトルのみから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。したがって、復号装置200は、処理効率を改善することができる。
また、例えば、第1参照ブロックが双予測で復号されている場合、回路260は、第1参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第1参照ブロックの2つの動きベクトルから、第1参照ピクチャリストを参照するための2つの候補動きベクトルと、第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出してもよい。
また、第2参照ブロックが双予測で復号されている場合、回路260は、第2参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第2参照ブロックの2つの動きベクトルから、第1参照ピクチャリストを参照するための2つの候補動きベクトルと、第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出してもよい。
これにより、復号装置200は、2つの参照ブロックの4つの動きベクトルのそれぞれから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、復号装置200は、2つの参照ブロックの4つの動きベクトルから、双予測に利用可能な2つの候補動きベクトルでそれぞれが構成される4組の候補動きベクトルセットを導出することができる。
また、例えば、第1参照ブロックが双予測で復号されている場合、回路260は、第1参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。そして、この場合、回路260は、第1参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、第2参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。
また、第2参照ブロックが双予測で復号されている場合、回路260は、第2参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。そして、この場合、回路260は、第2参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、第2参照ピクチャリストを参照するための候補動きベクトルを導出してもよい。
これにより、復号装置200は、2つの参照ブロックの4つの動きベクトルからそれぞれ4つの候補動きベクトルを導出することができ、4つの候補動きベクトルで構成される2組の候補動きベクトルセットを導出することができる。すなわち、復号装置200は、2つの参照ブロックの4つの動きベクトルを2組の候補動きベクトルセットに含まれる4つの候補動きベクトルにそれぞれ適切に反映させることができる。
また、例えば、第1参照ブロックが単予測で復号されている場合、回路260は、第1参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第1参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、第2参照ブロックが単予測で復号されている場合、回路260は、第2参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第2参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置200は、各参照ブロックの1つのみの動きベクトルから、2つの参照ピクチャリストを参照する2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。すなわち、復号装置200は、各参照ブロックの1つのみの動きベクトルから、双予測に利用可能な2つの候補動きベクトルで構成される候補動きベクトルセットを導出することができる。
また、例えば、復号対象ブロックは、表示順で前方向及び後方向のうち一方向のみの双予測で復号されてもよい。この場合、回路260は、第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの双予測に用いられる一方向を参照するための2つ以上の候補動きベクトルを導出してもよい。そして、この場合、回路260は、第2参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの双予測に用いられる一方向を参照するための2つ以上の候補動きベクトルを導出してもよい。
これにより、復号装置200は、復号対象ブロックに一方向のみの双予測が用いられる場合、各参照ブロックから、一方向を参照する2つ以上の候補動きベクトルを導出することができる。したがって、復号装置200は、各参照ブロックから、一方向のみの双予測に適切な1組以上の候補動きベクトルセットを導出することができる。
また、例えば、第1参照ピクチャリストは、表示順で前方向を参照するための参照ピクチャリストであってもよい。第2参照ピクチャリストは、表示順で後方向を参照するための参照ピクチャリストであってもよい。第1参照ブロックは、表示順で前方向及び後方向の両方向の双予測で復号されていてもよい。第2参照ブロックは、表示順で前方向及び後方向の両方向の双予測で復号されていてもよい。復号対象ブロックは、表示順で前方向及び後方向の両方向の双予測で復号されてもよい。
この場合、回路260は、第1参照ブロックの2つの動きベクトルのうち表示順で後方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第1参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
また、この場合、回路260は、第2参照ブロックの2つの動きベクトルのうち表示順で前方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用してもよい。この適用によって、回路260は、第2参照ブロックの1つの動きベクトルから、第1参照ピクチャリストを参照するための候補動きベクトルと、第2参照ピクチャリストを参照するための候補動きベクトルとを導出してもよい。
これにより、復号装置200は、各参照ブロックの2つの動きベクトルのうち、時間的に参照ブロックから復号対象ブロックへ向かう参照方向の動きベクトルから、2つの参照ピクチャリストを参照する候補動きベクトルセットを導出することができる。すなわち、復号装置200は、各参照ブロックの2つの動きベクトルのうち、復号対象ブロックに対して時間的に関連が強い動きベクトルから、双予測に利用可能な候補動きベクトルセットを適切に導出することができる。
また、例えば、第1参照ブロックの空間的な位置は、復号対象ブロックの空間的な位置と同じであってもよいし、第2参照ブロックの空間的な位置は、復号対象ブロックの空間的な位置と同じであってもよい。
図34Bは、動画像の復号時における候補動きベクトルの導出に関する第2動作例を示すフローチャートである。図33に示された復号装置200は、動画像を復号する際、図34Bに示された動作を行ってもよい。
具体的には、復号装置200の回路260は、復号対象ブロックに空間的に隣接する第1隣接ブロックの第1動きベクトルを用いて、第1参照ピクチャに含まれる第1参照ブロックを特定する(S501)。ここで、第1参照ピクチャは、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成するピクチャである。そして、回路260は、第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S502)。
また、回路260は、第1動きベクトル、第1隣接ブロックの第2動きベクトル、又は、復号対象ブロックに空間的に隣接する第2隣接ブロックの第3動きベクトルを用いて、第2参照ピクチャに含まれる第2参照ブロックを特定する(S503)。ここで、第2参照ピクチャは、2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成するピクチャである。そして、回路260は、第2参照ブロックの1つ以上の動きベクトルから、予測動きベクトルに対する1つ以上の候補動きベクトルを導出する(S504)。
そして、回路260は、複数の候補動きベクトルの中から、予測動きベクトルを選択する(S505)。ここで、複数の候補動きベクトルは、第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む。そして、回路260は、予測動きベクトルを用いて、復号対象ブロックの情報を復号する(S506)。
これにより、復号装置200は、1つ以上の隣接ブロックの1つ以上の動きベクトルを用いて、第1参照ピクチャリストにおける第1参照ブロック、及び、第2参照ピクチャリストにおける第2参照ブロックを特定することができる。すなわち、復号装置200は、1つ以上の隣接ブロックの1つ以上の動きベクトルを用いて、復号対象ブロックに対して関連が強いと想定される第1参照ブロック及び第2参照ブロックを特定することができる。
そして、復号装置200は、第1参照ブロックから候補動きベクトルを導出し、かつ、第2参照ブロックから候補動きベクトルを導出することができる。したがって、復号装置200は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。そして、これにより、復号装置200は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
また、図34Bに示された第2動作例において、図34Aを用いて説明された変形例又は具体例が適用されてもよい。
なお、図34Bに示された第2動作例は、図34Aに示された動作例における第1参照ブロック及び第2参照ブロックのそれぞれがATMVPブロックである場合の例である。図34Aに示された第1動作例における第1参照ブロック及び第2参照ブロックのそれぞれは、ATMVPブロックではなく、co-locatedブロックであってもよい。
具体的には、図34Aに示された第1動作例における第1参照ブロックは、第1参照ピクチャにおいて復号対象ブロックと位置が同じブロックであってもよい。そして、図34Aに示された第1動作例における第2参照ブロックは、第2参照ピクチャにおいて復号対象ブロックと位置が同じブロックであってもよい。
図34Cは、動画像の復号時における候補動きベクトルの導出に関する第3動作例を示すフローチャートである。図33に示された復号装置200は、動画像を復号する際、図34Cに示された動作を行ってもよい。
具体的には、復号装置200の回路260は、複数の参照ブロックのそれぞれを当該参照ブロックの動きベクトルに従って復号対象画像における対応領域にマッピングする(S601)。
ここで、複数の参照ブロックは、第1参照ピクチャに含まれる1つ以上の参照ブロックと、第2参照ピクチャに含まれる1つ以上の参照ブロックとを含む。第1参照ピクチャは、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成するピクチャである。第2参照ピクチャは、2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成するピクチャである。
そして、対応領域が復号対象画像における復号対象ブロックに重なる場合、回路260は、対応領域にマッピングされた参照ブロックの動きベクトルから、複数の候補動きベクトルの1つとして候補動きベクトルを導出する(S602)。この複数の候補動きベクトルは、復号対象ブロックの予測動きベクトルに対する複数の候補動きベクトルである。
そして、回路260は、複数の候補動きベクトルの中から、予測動きベクトルを選択する(S603)。そして、回路260は、予測動きベクトルを用いて、復号対象ブロックの情報を復号する(S604)。
これにより、復号装置200は、第1参照ピクチャリスト及び第2参照ピクチャリストにおける複数の参照ブロックのうち、復号対象ブロックに対して関連が強いと想定される参照ブロックから、適切な候補動きベクトルを導出することができる。したがって、復号装置200は、予測動きベクトルを選択するための複数の候補動きベクトルに適切な候補動きベクトルが含まれる可能性を高くすることができる。
そして、これにより、復号装置200は、適切な予測動きベクトルの導出を支援することができ、動画像に関する符号量の削減を支援することができる。
例えば、回路260は、第1参照ピクチャにおける1つ以上の参照ブロックのそれぞれを復号対象画像においてマッピングしてもよい。その後、回路260は、第2参照ピクチャにおける1つ以上の参照ブロックのそれぞれを復号対象画像のうち第1参照ピクチャにおける1つ以上の参照ブロックがマッピングされていない空き領域においてマッピングしてもよい。
これにより、復号装置200は、第2参照ピクチャリストにおける1つ以上の参照ブロックよりも、第1参照ピクチャリストにおける1つ以上の参照ブロックを優先してマッピングすることができる。第1参照ピクチャリストにおける参照ブロックの動きベクトルの信頼性が、第2参照ピクチャリストにおける参照ブロックの動きベクトルの信頼性よりも高い場合がある。このような場合に、復号装置200は、信頼性がより高い動きベクトルに従って、適切な候補動きベクトルを導出することができる。
また、例えば、複数の参照ブロックのうちの2つ以上の参照ブロックがマッピングされた2つ以上の対応領域が復号対象ブロックに重なってもよい。この場合、回路260は、2つ以上の参照ブロックの2つ以上の動きベクトルのうちの少なくとも1つの動きベクトルから候補動きベクトルを導出してもよい。
これにより、復号装置200は、復号対象ブロックに対して関連が強いと想定される複数の参照ブロックのうち少なくとも1つの参照ブロックから、適切な候補動きベクトルを導出することができる。
また、例えば、復号対象ブロックに重なる対応領域が存在せず、復号対象ブロックの周辺領域に重なる対応領域が存在してもよい。この場合、回路260は、周辺領域に重なる対応領域にマッピングされた参照ブロックの動きベクトルから、候補動きベクトルを導出してもよい。
これにより、復号装置200は、復号対象ブロックにおいて参照ブロックがマッピングされていなくても、復号対象ブロックの周辺においてマッピングされた参照ブロックの動きベクトルに従って、適切な候補動きベクトルを導出することができる。
また、例えば、回路260は、複数の候補動きベクトルの中から予測動きベクトルを選択する際、複数の候補動きベクトルのそれぞれを評価し、複数の候補動きベクトルのうち最も高く評価された候補動きベクトルを予測動きベクトルとして選択してもよい。
回路260は、複数の候補動きベクトルのそれぞれを評価する際、2つの比較対象領域の再構成画像間の適合度合いが高いほど、評価対象の候補動きベクトルをより高く評価してもよい。ここで、2つの比較対象領域は、復号対象ブロックとは異なる2つの領域であり、少なくとも一方が評価対象の候補動きベクトルに従って定められる2つの領域である。
これにより、復号装置200は、復号対象ブロックとは異なる領域の再構成画像を参照して各候補動きベクトルを評価し、複数の候補動きベクトルの中から予測動きベクトルを選択することができる。したがって、符号化装置100と復号装置200とが、同じ方法で、複数の候補動きベクトルの中から予測動きベクトルを選択することができる。よって、復号装置200は、予測動きベクトルを選択するための情報の復号を省くことができ、符号量の削減を支援することができる。
また、例えば、回路260は、対応領域にマッピングされた参照ブロックの動きベクトルから候補動きベクトルを導出する際、スケーリング比率が適用された、参照ブロックの動きベクトルを候補動きベクトルとして導出してもよい。
ここで、スケーリング比率は、参照ブロックを含む参照ピクチャから、参照ブロックの動きベクトルが指し示す参照領域を含む参照ピクチャまでの時間差に対する、復号対象ピクチャから、参照ブロックを含む参照ピクチャまでの時間差の比率である。復号対象ピクチャは、復号対象画像を含むピクチャである。
これにより、復号装置200は、参照ブロックの動きベクトルを適切にスケーリングすることができ、スケーリングされた動きベクトルを候補動きベクトルとして導出することができる。
また、例えば、復号対象ブロックは、復号単位として定められるブロックであってもよいし、復号単位として定められるブロックにおいて所定のサイズで定められるサブブロックであってもよい。
これにより、復号装置200は、復号単位のブロック、又は、復号単位のブロック内のサブブロックについて、適切な候補動きベクトルを導出することができる。
また、例えば、回路260は、復号対象画像における複数の復号対象ブロックのそれぞれについて、当該復号対象ブロックに対応領域が重なる場合、対応領域にマッピングされた参照ブロックの動きベクトルから、候補動きベクトルを導出してもよい。ここで、候補動きベクトルは、当該復号対象ブロックの予測動きベクトルに対する候補動きベクトルである。
これにより、復号装置200は、復号対象画像における各復号対象ブロックについて、適切な候補動きベクトルを導出することができる。
[補足]
上述された第1参照ピクチャリストは、L0参照ピクチャリスト及びL1ピクチャリストのうちの一方であり、上述された第2参照ピクチャリストは、L0参照ピクチャリスト及びL1ピクチャリストのうちの他方である。例えば、第1参照ピクチャリストがL0参照ピクチャリストであって、第2参照ピクチャリストがL1参照ピクチャリストであってもよい。あるいは、第1参照ピクチャリストがL1参照ピクチャリストであって、第2参照ピクチャリストがL0参照ピクチャリストであってもよい。
上述された第1参照ピクチャリストは、L0参照ピクチャリスト及びL1ピクチャリストのうちの一方であり、上述された第2参照ピクチャリストは、L0参照ピクチャリスト及びL1ピクチャリストのうちの他方である。例えば、第1参照ピクチャリストがL0参照ピクチャリストであって、第2参照ピクチャリストがL1参照ピクチャリストであってもよい。あるいは、第1参照ピクチャリストがL1参照ピクチャリストであって、第2参照ピクチャリストがL0参照ピクチャリストであってもよい。
また、参照ブロックの動きベクトルは、参照ピクチャインデックスが0である参照ピクチャとは異なるその他の参照ピクチャを処理対象ブロックから参照する候補動きベクトルにスケーリングされてもよい。また、参照ブロックの動きベクトルは、スケーリングされずに、そのまま候補動きベクトルとして導出されてもよい。
また、スケーリング比率が1である場合、スケーリング比率の適用において、スケーリング処理がスキップされてもよい。
また、本実施の形態における符号化装置100及び復号装置200は、それぞれ、画像符号化装置及び画像復号装置として利用されてもよいし、動画像符号化装置及び動画像復号装置として利用されてもよい。あるいは、符号化装置100及び復号装置200は、それぞれ、インター予測装置として利用され得る。
すなわち、符号化装置100及び復号装置200は、それぞれ、候補リスト生成部134を含むインター予測部126、及び、候補リスト生成部234を含むインター予測部218のみに対応していてもよい。そして、エントロピー符号化部110及びエントロピー復号部202等は、他の装置に含まれていてもよい。
また、本実施の形態において、各構成要素は、専用のハードウェアで構成されるか、各構成要素に適したソフトウェアプログラムを実行することによって実現されてもよい。各構成要素は、CPU又はプロセッサなどのプログラム実行部が、ハードディスク又は半導体メモリなどの記録媒体に記録されたソフトウェアプログラムを読み出して実行することによって実現されてもよい。
具体的には、符号化装置100及び復号装置200のそれぞれは、処理回路(Processing Circuitry)と、当該処理回路に電気的に接続された、当該処理回路からアクセス可能な記憶装置(Storage)とを備えていてもよい。例えば、処理回路は回路160又は260に対応し、記憶装置はメモリ162又は262に対応する。
処理回路は、専用のハードウェア及びプログラム実行部の少なくとも一方を含み、記憶装置を用いて処理を実行する。また、記憶装置は、処理回路がプログラム実行部を含む場合には、当該プログラム実行部により実行されるソフトウェアプログラムを記憶する。
ここで、本実施の形態の符号化装置100又は復号装置200などを実現するソフトウェアは、次のようなプログラムである。
すなわち、このプログラムは、コンピュータに、動画像の情報を符号化する符号化方法であって、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記符号化対象ブロックの情報を符号化する符号化方法を実行させる。
あるいは、このプログラムは、コンピュータに、動画像の情報を復号する復号方法であって、双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、前記予測動きベクトルを用いて、前記復号対象ブロックの情報を復号する復号方法を実行させてもよい。
また、各構成要素は、上述の通り、回路であってもよい。これらの回路は、全体として1つの回路を構成してもよいし、それぞれ別々の回路であってもよい。また、各構成要素は、汎用的なプロセッサで実現されてもよいし、専用のプロセッサで実現されてもよい。
また、特定の構成要素が実行する処理を別の構成要素が実行してもよい。また、処理を実行する順番が変更されてもよいし、複数の処理が並行して実行されてもよい。また、符号化復号装置が、符号化装置100及び復号装置200を備えていてもよい。
説明に用いられた第1及び第2等の序数は、適宜、付け替えられてもよい。また、構成要素などに対して、序数が新たに与えられてもよいし、取り除かれてもよい。
以上、符号化装置100及び復号装置200の態様について、実施の形態に基づいて説明したが、符号化装置100及び復号装置200の態様は、この実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、符号化装置100及び復号装置200の態様の範囲内に含まれてもよい。
(実施の形態2)
以上の各実施の形態において、機能ブロックの各々は、通常、MPU及びメモリ等によって実現可能である。また、機能ブロックの各々による処理は、通常、プロセッサなどのプログラム実行部が、ROM等の記録媒体に記録されたソフトウェア(プログラム)を読み出して実行することで実現される。当該ソフトウェアはダウンロード等により配布されてもよいし、半導体メモリなどの記録媒体に記録して配布されてもよい。なお、各機能ブロックをハードウェア(専用回路)によって実現することも、当然、可能である。
以上の各実施の形態において、機能ブロックの各々は、通常、MPU及びメモリ等によって実現可能である。また、機能ブロックの各々による処理は、通常、プロセッサなどのプログラム実行部が、ROM等の記録媒体に記録されたソフトウェア(プログラム)を読み出して実行することで実現される。当該ソフトウェアはダウンロード等により配布されてもよいし、半導体メモリなどの記録媒体に記録して配布されてもよい。なお、各機能ブロックをハードウェア(専用回路)によって実現することも、当然、可能である。
また、各実施の形態において説明した処理は、単一の装置(システム)を用いて集中処理することによって実現してもよく、又は、複数の装置を用いて分散処理することによって実現してもよい。また、上記プログラムを実行するプロセッサは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、又は分散処理を行ってもよい。
本開示の態様は、以上の実施例に限定されることなく、種々の変更が可能であり、それらも本開示の態様の範囲内に包含される。
さらにここで、上記各実施の形態で示した動画像符号化方法(画像符号化方法)又は動画像復号化方法(画像復号方法)の応用例とそれを用いたシステムを説明する。当該システムは、画像符号化方法を用いた画像符号化装置、画像復号方法を用いた画像復号装置、及び両方を備える画像符号化復号装置を有することを特徴とする。システムにおける他の構成について、場合に応じて適切に変更することができる。
[使用例]
図35は、コンテンツ配信サービスを実現するコンテンツ供給システムex100の全体構成を示す図である。通信サービスの提供エリアを所望の大きさに分割し、各セル内にそれぞれ固定無線局である基地局ex106、ex107、ex108、ex109、ex110が設置されている。
図35は、コンテンツ配信サービスを実現するコンテンツ供給システムex100の全体構成を示す図である。通信サービスの提供エリアを所望の大きさに分割し、各セル内にそれぞれ固定無線局である基地局ex106、ex107、ex108、ex109、ex110が設置されている。
このコンテンツ供給システムex100では、インターネットex101に、インターネットサービスプロバイダex102又は通信網ex104、及び基地局ex106~ex110を介して、コンピュータex111、ゲーム機ex112、カメラex113、家電ex114、及びスマートフォンex115などの各機器が接続される。当該コンテンツ供給システムex100は、上記のいずれかの要素を組合せて接続するようにしてもよい。固定無線局である基地局ex106~ex110を介さずに、各機器が電話網又は近距離無線等を介して直接的又は間接的に相互に接続されていてもよい。また、ストリーミングサーバex103は、インターネットex101等を介して、コンピュータex111、ゲーム機ex112、カメラex113、家電ex114、及びスマートフォンex115などの各機器と接続される。また、ストリーミングサーバex103は、衛星ex116を介して、飛行機ex117内のホットスポット内の端末等と接続される。
なお、基地局ex106~ex110の代わりに、無線アクセスポイント又はホットスポット等が用いられてもよい。また、ストリーミングサーバex103は、インターネットex101又はインターネットサービスプロバイダex102を介さずに直接通信網ex104と接続されてもよいし、衛星ex116を介さず直接飛行機ex117と接続されてもよい。
カメラex113はデジタルカメラ等の静止画撮影、及び動画撮影が可能な機器である。また、スマートフォンex115は、一般に2G、3G、3.9G、4G、そして今後は5Gと呼ばれる移動通信システムの方式に対応したスマートフォン機、携帯電話機、又はPHS(Personal Handyphone System)等である。
家電ex118は、冷蔵庫、又は家庭用燃料電池コージェネレーションシステムに含まれる機器等である。
コンテンツ供給システムex100では、撮影機能を有する端末が基地局ex106等を通じてストリーミングサーバex103に接続されることで、ライブ配信等が可能になる。ライブ配信では、端末(コンピュータex111、ゲーム機ex112、カメラex113、家電ex114、スマートフォンex115、及び飛行機ex117内の端末等)は、ユーザが当該端末を用いて撮影した静止画又は動画コンテンツに対して上記各実施の形態で説明した符号化処理を行い、符号化により得られた映像データと、映像に対応する音を符号化した音データと多重化し、得られたデータをストリーミングサーバex103に送信する。即ち、各端末は、本開示の一態様に係る画像符号化装置として機能する。
一方、ストリーミングサーバex103は要求のあったクライアントに対して送信されたコンテンツデータをストリーム配信する。クライアントは、上記符号化処理されたデータを復号化することが可能な、コンピュータex111、ゲーム機ex112、カメラex113、家電ex114、スマートフォンex115、又は飛行機ex117内の端末等である。配信されたデータを受信した各機器は、受信したデータを復号化処理して再生する。即ち、各機器は、本開示の一態様に係る画像復号装置として機能する。
[分散処理]
また、ストリーミングサーバex103は複数のサーバ又は複数のコンピュータであって、データを分散して処理したり記録したり配信するものであってもよい。例えば、ストリーミングサーバex103は、CDN(Contents Delivery Network)により実現され、世界中に分散された多数のエッジサーバとエッジサーバ間をつなぐネットワークによりコンテンツ配信が実現されていてもよい。CDNでは、クライアントに応じて物理的に近いエッジサーバが動的に割り当てられる。そして、当該エッジサーバにコンテンツがキャッシュ及び配信されることで遅延を減らすことができる。また、何らかのエラーが発生した場合又はトラフィックの増加などにより通信状態が変わる場合に複数のエッジサーバで処理を分散したり、他のエッジサーバに配信主体を切り替えたり、障害が生じたネットワークの部分を迂回して配信を続けることができるので、高速かつ安定した配信が実現できる。
また、ストリーミングサーバex103は複数のサーバ又は複数のコンピュータであって、データを分散して処理したり記録したり配信するものであってもよい。例えば、ストリーミングサーバex103は、CDN(Contents Delivery Network)により実現され、世界中に分散された多数のエッジサーバとエッジサーバ間をつなぐネットワークによりコンテンツ配信が実現されていてもよい。CDNでは、クライアントに応じて物理的に近いエッジサーバが動的に割り当てられる。そして、当該エッジサーバにコンテンツがキャッシュ及び配信されることで遅延を減らすことができる。また、何らかのエラーが発生した場合又はトラフィックの増加などにより通信状態が変わる場合に複数のエッジサーバで処理を分散したり、他のエッジサーバに配信主体を切り替えたり、障害が生じたネットワークの部分を迂回して配信を続けることができるので、高速かつ安定した配信が実現できる。
また、配信自体の分散処理にとどまらず、撮影したデータの符号化処理を各端末で行ってもよいし、サーバ側で行ってもよいし、互いに分担して行ってもよい。一例として、一般に符号化処理では、処理ループが2度行われる。1度目のループでフレーム又はシーン単位での画像の複雑さ、又は、符号量が検出される。また、2度目のループでは画質を維持して符号化効率を向上させる処理が行われる。例えば、端末が1度目の符号化処理を行い、コンテンツを受け取ったサーバ側が2度目の符号化処理を行うことで、各端末での処理負荷を減らしつつもコンテンツの質と効率を向上させることができる。この場合、ほぼリアルタイムで受信して復号する要求があれば、端末が行った一度目の符号化済みデータを他の端末で受信して再生することもできるので、より柔軟なリアルタイム配信も可能になる。
他の例として、カメラex113等は、画像から特徴量抽出を行い、特徴量に関するデータをメタデータとして圧縮してサーバに送信する。サーバは、例えば特徴量からオブジェクトの重要性を判断して量子化精度を切り替えるなど、画像の意味に応じた圧縮を行う。特徴量データはサーバでの再度の圧縮時の動きベクトル予測の精度及び効率向上に特に有効である。また、端末でVLC(可変長符号化)などの簡易的な符号化を行い、サーバでCABAC(コンテキスト適応型二値算術符号化方式)など処理負荷の大きな符号化を行ってもよい。
さらに他の例として、スタジアム、ショッピングモール、又は工場などにおいては、複数の端末によりほぼ同一のシーンが撮影された複数の映像データが存在する場合がある。この場合には、撮影を行った複数の端末と、必要に応じて撮影をしていない他の端末及びサーバを用いて、例えばGOP(Group of Picture)単位、ピクチャ単位、又はピクチャを分割したタイル単位などで符号化処理をそれぞれ割り当てて分散処理を行う。これにより、遅延を減らし、よりリアルタイム性を実現できる。
また、複数の映像データはほぼ同一シーンであるため、各端末で撮影された映像データを互いに参照し合えるように、サーバで管理及び/又は指示をしてもよい。または、各端末からの符号化済みデータを、サーバが受信し複数のデータ間で参照関係を変更、又はピクチャ自体を補正或いは差し替えて符号化しなおしてもよい。これにより、一つ一つのデータの質と効率を高めたストリームを生成できる。
また、サーバは、映像データの符号化方式を変更するトランスコードを行ったうえで映像データを配信してもよい。例えば、サーバは、MPEG系の符号化方式をVP系に変換してもよいし、H.264をH.265に変換してもよい。
このように、符号化処理は、端末、又は1以上のサーバにより行うことが可能である。よって、以下では、処理を行う主体として「サーバ」又は「端末」等の記載を用いるが、サーバで行われる処理の一部又は全てが端末で行われてもよいし、端末で行われる処理の一部又は全てがサーバで行われてもよい。また、これらに関しては、復号処理についても同様である。
[3D、マルチアングル]
近年では、互いにほぼ同期した複数のカメラex113及び/又はスマートフォンex115などの端末により撮影された異なるシーン、又は、同一シーンを異なるアングルから撮影した画像或いは映像を統合して利用することも増えてきている。各端末で撮影した映像は、別途取得した端末間の相対的な位置関係、又は、映像に含まれる特徴点が一致する領域などに基づいて統合される。
近年では、互いにほぼ同期した複数のカメラex113及び/又はスマートフォンex115などの端末により撮影された異なるシーン、又は、同一シーンを異なるアングルから撮影した画像或いは映像を統合して利用することも増えてきている。各端末で撮影した映像は、別途取得した端末間の相対的な位置関係、又は、映像に含まれる特徴点が一致する領域などに基づいて統合される。
サーバは、2次元の動画像を符号化するだけでなく、動画像のシーン解析などに基づいて自動的に、又は、ユーザが指定した時刻において、静止画を符号化し、受信端末に送信してもよい。サーバは、さらに、撮影端末間の相対的な位置関係を取得できる場合には、2次元の動画像だけでなく、同一シーンが異なるアングルから撮影された映像に基づき、当該シーンの3次元形状を生成できる。なお、サーバは、ポイントクラウドなどにより生成した3次元のデータを別途符号化してもよいし、3次元データを用いて人物又はオブジェクトを認識或いは追跡した結果に基づいて、受信端末に送信する映像を、複数の端末で撮影した映像から選択、又は、再構成して生成してもよい。
このようにして、ユーザは、各撮影端末に対応する各映像を任意に選択してシーンを楽しむこともできるし、複数画像又は映像を用いて再構成された3次元データから任意視点の映像を切り出したコンテンツを楽しむこともできる。さらに、映像と同様に音も複数の相異なるアングルから収音され、サーバは、映像に合わせて特定のアングル又は空間からの音を映像と多重化して送信してもよい。
また、近年ではVirtual Reality(VR)及びAugmented Reality(AR)など、現実世界と仮想世界とを対応付けたコンテンツも普及してきている。VRの画像の場合、サーバは、右目用及び左目用の視点画像をそれぞれ作成し、Multi-View Coding(MVC)などにより各視点映像間で参照を許容する符号化を行ってもよいし、互いに参照せずに別ストリームとして符号化してもよい。別ストリームの復号時には、ユーザの視点に応じて仮想的な3次元空間が再現されるように互いに同期させて再生するとよい。
ARの画像の場合には、サーバは、現実空間のカメラ情報に、仮想空間上の仮想物体情報を、3次元的位置又はユーザの視点の動きに基づいて重畳する。復号装置は、仮想物体情報及び3次元データを取得又は保持し、ユーザの視点の動きに応じて2次元画像を生成し、スムーズにつなげることで重畳データを作成してもよい。または、復号装置は仮想物体情報の依頼に加えてユーザの視点の動きをサーバに送信し、サーバは、サーバに保持される3次元データから受信した視点の動きに合わせて重畳データを作成し、重畳データを符号化して復号装置に配信してもよい。なお、重畳データは、RGB以外に透過度を示すα値を有し、サーバは、3次元データから作成されたオブジェクト以外の部分のα値が0などに設定し、当該部分が透過する状態で、符号化してもよい。もしくは、サーバは、クロマキーのように所定の値のRGB値を背景に設定し、オブジェクト以外の部分は背景色にしたデータを生成してもよい。
同様に配信されたデータの復号処理はクライアントである各端末で行っても、サーバ側で行ってもよいし、互いに分担して行ってもよい。一例として、ある端末が、一旦サーバに受信リクエストを送り、そのリクエストに応じたコンテンツを他の端末で受信し復号処理を行い、ディスプレイを有する装置に復号済みの信号が送信されてもよい。通信可能な端末自体の性能によらず処理を分散して適切なコンテンツを選択することで画質のよいデータを再生することができる。また、他の例として大きなサイズの画像データをTV等で受信しつつ、鑑賞者の個人端末にピクチャが分割されたタイルなど一部の領域が復号されて表示されてもよい。これにより、全体像を共有化しつつ、自身の担当分野又はより詳細に確認したい領域を手元で確認することができる。
また今後は、屋内外にかかわらず近距離、中距離、又は長距離の無線通信が複数使用可能な状況下で、MPEG-DASHなどの配信システム規格を利用して、接続中の通信に対して適切なデータを切り替えながらシームレスにコンテンツを受信することが予想される。これにより、ユーザは、自身の端末のみならず屋内外に設置されたディスプレイなどの復号装置又は表示装置を自由に選択しながらリアルタイムで切り替えられる。また、自身の位置情報などに基づいて、復号する端末及び表示する端末を切り替えながら復号を行うことができる。これにより、目的地への移動中に、表示可能なデバイスが埋め込まれた隣の建物の壁面又は地面の一部に地図情報を表示させながら移動することも可能になる。また、符号化データが受信端末から短時間でアクセスできるサーバにキャッシュされている、又は、コンテンツ・デリバリー・サービスにおけるエッジサーバにコピーされている、などの、ネットワーク上での符号化データへのアクセス容易性に基づいて、受信データのビットレートを切り替えることも可能である。
[スケーラブル符号化]
コンテンツの切り替えに関して、図36に示す、上記各実施の形態で示した動画像符号化方法を応用して圧縮符号化されたスケーラブルなストリームを用いて説明する。サーバは、個別のストリームとして内容は同じで質の異なるストリームを複数有していても構わないが、図示するようにレイヤに分けて符号化を行うことで実現される時間的/空間的スケーラブルなストリームの特徴を活かして、コンテンツを切り替える構成であってもよい。つまり、復号側が性能という内的要因と通信帯域の状態などの外的要因とに応じてどのレイヤまで復号するかを決定することで、復号側は、低解像度のコンテンツと高解像度のコンテンツとを自由に切り替えて復号できる。例えば移動中にスマートフォンex115で視聴していた映像の続きを、帰宅後にインターネットTV等の機器で視聴したい場合には、当該機器は、同じストリームを異なるレイヤまで復号すればよいので、サーバ側の負担を軽減できる。
コンテンツの切り替えに関して、図36に示す、上記各実施の形態で示した動画像符号化方法を応用して圧縮符号化されたスケーラブルなストリームを用いて説明する。サーバは、個別のストリームとして内容は同じで質の異なるストリームを複数有していても構わないが、図示するようにレイヤに分けて符号化を行うことで実現される時間的/空間的スケーラブルなストリームの特徴を活かして、コンテンツを切り替える構成であってもよい。つまり、復号側が性能という内的要因と通信帯域の状態などの外的要因とに応じてどのレイヤまで復号するかを決定することで、復号側は、低解像度のコンテンツと高解像度のコンテンツとを自由に切り替えて復号できる。例えば移動中にスマートフォンex115で視聴していた映像の続きを、帰宅後にインターネットTV等の機器で視聴したい場合には、当該機器は、同じストリームを異なるレイヤまで復号すればよいので、サーバ側の負担を軽減できる。
さらに、上記のように、レイヤ毎にピクチャが符号化されており、ベースレイヤの上位にエンハンスメントレイヤが存在するスケーラビリティを実現する構成以外に、エンハンスメントレイヤが画像の統計情報などに基づくメタ情報を含み、復号側が、メタ情報に基づきベースレイヤのピクチャを超解像することで高画質化したコンテンツを生成してもよい。超解像とは、同一解像度におけるSN比の向上、及び、解像度の拡大のいずれであってもよい。メタ情報は、超解像処理に用いる線形或いは非線形のフィルタ係数を特定するため情報、又は、超解像処理に用いるフィルタ処理、機械学習或いは最小2乗演算におけるパラメータ値を特定する情報などを含む。
または、画像内のオブジェクトなどの意味合いに応じてピクチャがタイル等に分割されており、復号側が、復号するタイルを選択することで一部の領域だけを復号する構成であってもよい。また、オブジェクトの属性(人物、車、ボールなど)と映像内の位置(同一画像における座標位置など)とをメタ情報として格納することで、復号側は、メタ情報に基づいて所望のオブジェクトの位置を特定し、そのオブジェクトを含むタイルを決定できる。例えば、図37に示すように、メタ情報は、HEVCにおけるSEIメッセージなど画素データとは異なるデータ格納構造を用いて格納される。このメタ情報は、例えば、メインオブジェクトの位置、サイズ、又は色彩などを示す。
また、ストリーム、シーケンス又はランダムアクセス単位など、複数のピクチャから構成される単位でメタ情報が格納されてもよい。これにより、復号側は、特定人物が映像内に出現する時刻などが取得でき、ピクチャ単位の情報と合わせることで、オブジェクトが存在するピクチャ、及び、ピクチャ内でのオブジェクトの位置を特定できる。
[Webページの最適化]
図38は、コンピュータex111等におけるwebページの表示画面例を示す図である。図39は、スマートフォンex115等におけるwebページの表示画面例を示す図である。図38及び図39に示すようにwebページが、画像コンテンツへのリンクであるリンク画像を複数含む場合があり、閲覧するデバイスによってその見え方は異なる。画面上に複数のリンク画像が見える場合には、ユーザが明示的にリンク画像を選択するまで、又は画面の中央付近にリンク画像が近付く或いはリンク画像の全体が画面内に入るまでは、表示装置(復号装置)は、リンク画像として各コンテンツが有する静止画又はIピクチャを表示したり、複数の静止画又はIピクチャ等でgifアニメのような映像を表示したり、ベースレイヤのみ受信して映像を復号及び表示したりする。
図38は、コンピュータex111等におけるwebページの表示画面例を示す図である。図39は、スマートフォンex115等におけるwebページの表示画面例を示す図である。図38及び図39に示すようにwebページが、画像コンテンツへのリンクであるリンク画像を複数含む場合があり、閲覧するデバイスによってその見え方は異なる。画面上に複数のリンク画像が見える場合には、ユーザが明示的にリンク画像を選択するまで、又は画面の中央付近にリンク画像が近付く或いはリンク画像の全体が画面内に入るまでは、表示装置(復号装置)は、リンク画像として各コンテンツが有する静止画又はIピクチャを表示したり、複数の静止画又はIピクチャ等でgifアニメのような映像を表示したり、ベースレイヤのみ受信して映像を復号及び表示したりする。
ユーザによりリンク画像が選択された場合、表示装置は、ベースレイヤを最優先にして復号する。なお、webページを構成するHTMLにスケーラブルなコンテンツであることを示す情報があれば、表示装置は、エンハンスメントレイヤまで復号してもよい。また、リアルタイム性を担保するために、選択される前又は通信帯域が非常に厳しい場合には、表示装置は、前方参照のピクチャ(Iピクチャ、Pピクチャ、前方参照のみのBピクチャ)のみを復号及び表示することで、先頭ピクチャの復号時刻と表示時刻との間の遅延(コンテンツの復号開始から表示開始までの遅延)を低減できる。また、表示装置は、ピクチャの参照関係を敢えて無視して全てのBピクチャ及びPピクチャを前方参照にして粗く復号し、時間が経ち受信したピクチャが増えるにつれて正常の復号を行ってもよい。
[自動走行]
また、車の自動走行又は走行支援のため2次元又は3次元の地図情報などの静止画又は映像データを送受信する場合、受信端末は、1以上のレイヤに属する画像データに加えて、メタ情報として天候又は工事の情報なども受信し、これらを対応付けて復号してもよい。なお、メタ情報は、レイヤに属してもよいし、単に画像データと多重化されてもよい。
また、車の自動走行又は走行支援のため2次元又は3次元の地図情報などの静止画又は映像データを送受信する場合、受信端末は、1以上のレイヤに属する画像データに加えて、メタ情報として天候又は工事の情報なども受信し、これらを対応付けて復号してもよい。なお、メタ情報は、レイヤに属してもよいし、単に画像データと多重化されてもよい。
この場合、受信端末を含む車、ドローン又は飛行機などが移動するため、受信端末は、当該受信端末の位置情報を受信要求時に送信することで、基地局ex106~ex110を切り替えながらシームレスな受信及び復号を実現できる。また、受信端末は、ユーザの選択、ユーザの状況又は通信帯域の状態に応じて、メタ情報をどの程度受信するか、又は地図情報をどの程度更新していくかを動的に切り替えることが可能になる。
以上のようにして、コンテンツ供給システムex100では、ユーザが送信した符号化された情報をリアルタイムでクライアントが受信して復号し、再生することができる。
[個人コンテンツの配信]
また、コンテンツ供給システムex100では、映像配信業者による高画質で長時間のコンテンツのみならず、個人による低画質で短時間のコンテンツのユニキャスト、又はマルチキャスト配信が可能である。また、このような個人のコンテンツは今後も増加していくと考えられる。個人コンテンツをより優れたコンテンツにするために、サーバは、編集処理を行ってから符号化処理を行ってもよい。これは例えば、以下のような構成で実現できる。
また、コンテンツ供給システムex100では、映像配信業者による高画質で長時間のコンテンツのみならず、個人による低画質で短時間のコンテンツのユニキャスト、又はマルチキャスト配信が可能である。また、このような個人のコンテンツは今後も増加していくと考えられる。個人コンテンツをより優れたコンテンツにするために、サーバは、編集処理を行ってから符号化処理を行ってもよい。これは例えば、以下のような構成で実現できる。
撮影時にリアルタイム又は蓄積して撮影後に、サーバは、原画又は符号化済みデータから撮影エラー、シーン探索、意味の解析、及びオブジェクト検出などの認識処理を行う。そして、サーバは、認識結果に基いて手動又は自動で、ピントずれ又は手ブレなどを補正したり、明度が他のピクチャに比べて低い又は焦点が合っていないシーンなどの重要性の低いシーンを削除したり、オブジェクトのエッジを強調したり、色合いを変化させるなどの編集を行う。サーバは、編集結果に基いて編集後のデータを符号化する。また撮影時刻が長すぎると視聴率が下がることも知られており、サーバは、撮影時間に応じて特定の時間範囲内のコンテンツになるように上記のように重要性が低いシーンのみならず動きが少ないシーンなどを、画像処理結果に基き自動でクリップしてもよい。または、サーバは、シーンの意味解析の結果に基づいてダイジェストを生成して符号化してもよい。
なお、個人コンテンツには、そのままでは著作権、著作者人格権、又は肖像権等の侵害となるものが写り込んでいるケースもあり、共有する範囲が意図した範囲を超えてしまうなど個人にとって不都合な場合もある。よって、例えば、サーバは、画面の周辺部の人の顔、又は家の中などを敢えて焦点が合わない画像に変更して符号化してもよい。また、サーバは、符号化対象画像内に、予め登録した人物とは異なる人物の顔が映っているかどうかを認識し、映っている場合には、顔の部分にモザイクをかけるなどの処理を行ってもよい。または、符号化の前処理又は後処理として、著作権などの観点からユーザが画像を加工したい人物又は背景領域を指定し、サーバは、指定された領域を別の映像に置き換える、又は焦点をぼかすなどの処理を行うことも可能である。人物であれば、動画像において人物をトラッキングしながら、顔の部分の映像を置き換えることができる。
また、データ量の小さい個人コンテンツの視聴はリアルタイム性の要求が強いため、帯域幅にもよるが、復号装置は、まずベースレイヤを最優先で受信して復号及び再生を行う。復号装置は、この間にエンハンスメントレイヤを受信し、再生がループされる場合など2回以上再生される場合に、エンハンスメントレイヤも含めて高画質の映像を再生してもよい。このようにスケーラブルな符号化が行われているストリームであれば、未選択時又は見始めた段階では粗い動画だが、徐々にストリームがスマートになり画像がよくなるような体験を提供することができる。スケーラブル符号化以外にも、1回目に再生される粗いストリームと、1回目の動画を参照して符号化される2回目のストリームとが1つのストリームとして構成されていても同様の体験を提供できる。
[その他の使用例]
また、これらの符号化又は復号処理は、一般的に各端末が有するLSIex500において処理される。LSIex500は、ワンチップであっても複数チップからなる構成であってもよい。なお、動画像符号化又は復号用のソフトウェアをコンピュータex111等で読み取り可能な何らかの記録メディア(CD-ROM、フレキシブルディスク、又はハードディスクなど)に組み込み、そのソフトウェアを用いて符号化又は復号処理を行ってもよい。さらに、スマートフォンex115がカメラ付きである場合には、そのカメラで取得した動画データを送信してもよい。このときの動画データはスマートフォンex115が有するLSIex500で符号化処理されたデータである。
また、これらの符号化又は復号処理は、一般的に各端末が有するLSIex500において処理される。LSIex500は、ワンチップであっても複数チップからなる構成であってもよい。なお、動画像符号化又は復号用のソフトウェアをコンピュータex111等で読み取り可能な何らかの記録メディア(CD-ROM、フレキシブルディスク、又はハードディスクなど)に組み込み、そのソフトウェアを用いて符号化又は復号処理を行ってもよい。さらに、スマートフォンex115がカメラ付きである場合には、そのカメラで取得した動画データを送信してもよい。このときの動画データはスマートフォンex115が有するLSIex500で符号化処理されたデータである。
なお、LSIex500は、アプリケーションソフトをダウンロードしてアクティベートする構成であってもよい。この場合、端末は、まず、当該端末がコンテンツの符号化方式に対応しているか、又は、特定サービスの実行能力を有するかを判定する。端末がコンテンツの符号化方式に対応していない場合、又は、特定サービスの実行能力を有さない場合、端末は、コーデック又はアプリケーションソフトをダウンロードし、その後、コンテンツ取得及び再生する。
また、インターネットex101を介したコンテンツ供給システムex100に限らず、デジタル放送用システムにも上記各実施の形態の少なくとも動画像符号化装置(画像符号化装置)又は動画像復号化装置(画像復号装置)のいずれかを組み込むことができる。衛星などを利用して放送用の電波に映像と音が多重化された多重化データを載せて送受信するため、コンテンツ供給システムex100のユニキャストがし易い構成に対してマルチキャスト向きであるという違いがあるが符号化処理及び復号処理に関しては同様の応用が可能である。
[ハードウェア構成]
図40は、スマートフォンex115を示す図である。また、図41は、スマートフォンex115の構成例を示す図である。スマートフォンex115は、基地局ex110との間で電波を送受信するためのアンテナex450と、映像及び静止画を撮ることが可能なカメラ部ex465と、カメラ部ex465で撮像した映像、及びアンテナex450で受信した映像等が復号されたデータを表示する表示部ex458とを備える。スマートフォンex115は、さらに、タッチパネル等である操作部ex466と、音声又は音響を出力するためのスピーカ等である音声出力部ex457と、音声を入力するためのマイク等である音声入力部ex456と、撮影した映像或いは静止画、録音した音声、受信した映像或いは静止画、メール等の符号化されたデータ、又は、復号化されたデータを保存可能なメモリ部ex467と、ユーザを特定し、ネットワークをはじめ各種データへのアクセスの認証をするためのSIMex468とのインタフェース部であるスロット部ex464とを備える。なお、メモリ部ex467の代わりに外付けメモリが用いられてもよい。
図40は、スマートフォンex115を示す図である。また、図41は、スマートフォンex115の構成例を示す図である。スマートフォンex115は、基地局ex110との間で電波を送受信するためのアンテナex450と、映像及び静止画を撮ることが可能なカメラ部ex465と、カメラ部ex465で撮像した映像、及びアンテナex450で受信した映像等が復号されたデータを表示する表示部ex458とを備える。スマートフォンex115は、さらに、タッチパネル等である操作部ex466と、音声又は音響を出力するためのスピーカ等である音声出力部ex457と、音声を入力するためのマイク等である音声入力部ex456と、撮影した映像或いは静止画、録音した音声、受信した映像或いは静止画、メール等の符号化されたデータ、又は、復号化されたデータを保存可能なメモリ部ex467と、ユーザを特定し、ネットワークをはじめ各種データへのアクセスの認証をするためのSIMex468とのインタフェース部であるスロット部ex464とを備える。なお、メモリ部ex467の代わりに外付けメモリが用いられてもよい。
また、表示部ex458及び操作部ex466等を統括的に制御する主制御部ex460と、電源回路部ex461、操作入力制御部ex462、映像信号処理部ex455、カメラインタフェース部ex463、ディスプレイ制御部ex459、変調/復調部ex452、多重/分離部ex453、音声信号処理部ex454、スロット部ex464、及びメモリ部ex467とがバスex470を介して接続されている。
電源回路部ex461は、ユーザの操作により電源キーがオン状態にされると、バッテリパックから各部に対して電力を供給することによりスマートフォンex115を動作可能な状態に起動する。
スマートフォンex115は、CPU、ROM及びRAM等を有する主制御部ex460の制御に基づいて、通話及データ通信等の処理を行う。通話時は、音声入力部ex456で収音した音声信号を音声信号処理部ex454でデジタル音声信号に変換し、これを変調/復調部ex452でスペクトラム拡散処理し、送信/受信部ex451でデジタルアナログ変換処理及び周波数変換処理を施した後にアンテナex450を介して送信する。また受信データを増幅して周波数変換処理及びアナログデジタル変換処理を施し、変調/復調部ex452でスペクトラム逆拡散処理し、音声信号処理部ex454でアナログ音声信号に変換した後、これを音声出力部ex457から出力する。データ通信モード時は、本体部の操作部ex466等の操作によってテキスト、静止画、又は映像データが操作入力制御部ex462を介して主制御部ex460に送出され、同様に送受信処理が行われる。データ通信モード時に映像、静止画、又は映像と音声を送信する場合、映像信号処理部ex455は、メモリ部ex467に保存されている映像信号又はカメラ部ex465から入力された映像信号を上記各実施の形態で示した動画像符号化方法によって圧縮符号化し、符号化された映像データを多重/分離部ex453に送出する。また、音声信号処理部ex454は、映像又は静止画等をカメラ部ex465で撮像中に音声入力部ex456で収音した音声信号を符号化し、符号化された音声データを多重/分離部ex453に送出する。多重/分離部ex453は、符号化済み映像データと符号化済み音声データを所定の方式で多重化し、変調/復調部(変調/復調回路部)ex452、及び送信/受信部ex451で変調処理及び変換処理を施してアンテナex450を介して送信する。
電子メール又はチャットに添付された映像、又はウェブページ等にリンクされた映像を受信した場合、アンテナex450を介して受信された多重化データを復号するために、多重/分離部ex453は、多重化データを分離することにより、多重化データを映像データのビットストリームと音声データのビットストリームとに分け、同期バスex470を介して符号化された映像データを映像信号処理部ex455に供給するとともに、符号化された音声データを音声信号処理部ex454に供給する。映像信号処理部ex455は、上記各実施の形態で示した動画像符号化方法に対応した動画像復号化方法によって映像信号を復号し、ディスプレイ制御部ex459を介して表示部ex458から、リンクされた動画像ファイルに含まれる映像又は静止画が表示される。また音声信号処理部ex454は、音声信号を復号し、音声出力部ex457から音声が出力される。なおリアルタイムストリーミングが普及しているため、ユーザの状況によっては音声の再生が社会的にふさわしくない場も起こりえる。そのため、初期値としては、音声信号は再生せず映像データのみを再生する構成の方が望ましい。ユーザが映像データをクリックするなど操作を行った場合にのみ音声を同期して再生してもよい。
またここではスマートフォンex115を例に説明したが、端末としては符号化器及び復号化器を両方持つ送受信型端末の他に、符号化器のみを有する送信端末、及び、復号化器のみを有する受信端末という3通りの実装形式が考えられる。さらに、デジタル放送用システムにおいて、映像データに音声データなどが多重化された多重化データを受信又は送信するとして説明したが、多重化データには、音声データ以外に映像に関連する文字データなどが多重化されてもよいし、多重化データではなく映像データ自体が受信又は送信されてもよい。
なお、CPUを含む主制御部ex460が符号化又は復号処理を制御するとして説明したが、端末はGPUを備えることも多い。よって、CPUとGPUで共通化されたメモリ、又は共通に使用できるようにアドレスが管理されているメモリにより、GPUの性能を活かして広い領域を一括して処理する構成でもよい。これにより符号化時間を短縮でき、リアルタイム性を確保し、低遅延を実現できる。特に動き探索、デブロックフィルタ、SAO(Sample Adaptive Offset)、及び変換・量子化の処理を、CPUではなく、GPUでピクチャなどの単位で一括して行うと効率的である。
本開示は、例えば、テレビジョン受像機、デジタルビデオレコーダー、カーナビゲーション、携帯電話、デジタルカメラ、デジタルビデオカメラ、テレビ会議システム、又は、電子ミラー等に利用可能である。
100 符号化装置
102 分割部
104 減算部
106 変換部
108 量子化部
110 エントロピー符号化部
112、204 逆量子化部
114、206 逆変換部
116、208 加算部
118、210 ブロックメモリ
120、212 ループフィルタ部
122、214 フレームメモリ
124、216 イントラ予測部
126、218 インター予測部
128、220 予測制御部
132 ピクチャタイプ決定部
134、234 候補リスト生成部
136、236 候補ブロック情報メモリ
160、260 回路
162、262 メモリ
200 復号装置
202 エントロピー復号部
102 分割部
104 減算部
106 変換部
108 量子化部
110 エントロピー符号化部
112、204 逆量子化部
114、206 逆変換部
116、208 加算部
118、210 ブロックメモリ
120、212 ループフィルタ部
122、214 フレームメモリ
124、216 イントラ予測部
126、218 インター予測部
128、220 予測制御部
132 ピクチャタイプ決定部
134、234 候補リスト生成部
136、236 候補ブロック情報メモリ
160、260 回路
162、262 メモリ
200 復号装置
202 エントロピー復号部
Claims (18)
- 動画像の情報を符号化する符号化装置であって、
メモリと、
前記メモリにアクセス可能な回路とを備え、
前記メモリにアクセス可能な前記回路は、
双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、
前記予測動きベクトルを用いて、前記符号化対象ブロックの情報を符号化する
符号化装置。 - 前記回路は、
前記第1参照ブロックが双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックが双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項1に記載の符号化装置。 - 前記回路は、
前記第1参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項2に記載の符号化装置。 - 前記回路は、
前記第1参照ブロックが双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出し、
前記第2参照ブロックが双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出する
請求項1に記載の符号化装置。 - 前記回路は、
前記第1参照ブロックが双予測で符号化されている場合、前記第1参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第1参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出し、
前記第2参照ブロックが双予測で符号化されている場合、前記第2参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第2参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出する
請求項1に記載の符号化装置。 - 前記回路は、
前記第1参照ブロックが単予測で符号化されている場合、前記第1参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックが単予測で符号化されている場合、前記第2参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項1~5のいずれか1項に記載の符号化装置。 - 前記回路は、前記符号化対象ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で符号化される場合、
前記第1参照ブロックの1つ以上の動きベクトルから、前記符号化対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出し、
前記第2参照ブロックの1つ以上の動きベクトルから、前記符号化対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出する
請求項1~6のいずれか1項に記載の符号化装置。 - 前記回路は、前記第1参照ピクチャリストが表示順で前方向を参照するための参照ピクチャリストであり、前記第2参照ピクチャリストが表示順で後方向を参照するための参照ピクチャリストであり、前記第1参照ブロックが表示順で前方向及び後方向の両方向の双予測で符号化されており、前記第2参照ブロックが表示順で前方向及び後方向の両方向の双予測で符号化されており、前記符号化対象ブロックが表示順で前方向及び後方向の両方向の双予測で符号化される場合、
前記第1参照ブロックの2つの動きベクトルのうち表示順で後方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックの2つの動きベクトルのうち表示順で前方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項1又は2に記載の符号化装置。 - 動画像の情報を復号する復号装置であって、
メモリと、
前記メモリにアクセス可能な回路とを備え、
前記メモリにアクセス可能な前記回路は、
双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、
前記予測動きベクトルを用いて、前記復号対象ブロックの情報を復号する
復号装置。 - 前記回路は、
前記第1参照ブロックが双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックが双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのうちの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項9に記載の復号装置。 - 前記回路は、
前記第1参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルのうち1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項10に記載の復号装置。 - 前記回路は、
前記第1参照ブロックが双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出し、
前記第2参照ブロックが双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのそれぞれに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの2つの動きベクトルから、前記第1参照ピクチャリストを参照するための2つの候補動きベクトルと、前記第2参照ピクチャリストを参照するための2つの候補動きベクトルとを導出する
請求項9に記載の復号装置。 - 前記回路は、
前記第1参照ブロックが双予測で復号されている場合、前記第1参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第1参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出し、
前記第2参照ブロックが双予測で復号されている場合、前記第2参照ブロックの2つの動きベクトルのうちの一方の動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルを導出し、前記第2参照ブロックの2つの動きベクトルのうちの他方の動きベクトルから、前記第2参照ピクチャリストを参照するための候補動きベクトルを導出する
請求項9に記載の復号装置。 - 前記回路は、
前記第1参照ブロックが単予測で復号されている場合、前記第1参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックが単予測で復号されている場合、前記第2参照ブロックの1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項9~13のいずれか1項に記載の復号装置。 - 前記回路は、前記復号対象ブロックが表示順で前方向及び後方向のうち一方向のみの双予測で復号される場合、
前記第1参照ブロックの1つ以上の動きベクトルから、前記復号対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出し、
前記第2参照ブロックの1つ以上の動きベクトルから、前記復号対象ブロックの双予測に用いられる前記一方向を参照するための2つ以上の候補動きベクトルを導出する
請求項9~14のいずれか1項に記載の復号装置。 - 前記回路は、前記第1参照ピクチャリストが表示順で前方向を参照するための参照ピクチャリストであり、前記第2参照ピクチャリストが表示順で後方向を参照するための参照ピクチャリストであり、前記第1参照ブロックが表示順で前方向及び後方向の両方向の双予測で復号されており、前記第2参照ブロックが表示順で前方向及び後方向の両方向の双予測で復号されており、前記復号対象ブロックが表示順で前方向及び後方向の両方向の双予測で復号される場合、
前記第1参照ブロックの2つの動きベクトルのうち表示順で後方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第1参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出し、
前記第2参照ブロックの2つの動きベクトルのうち表示順で前方向を参照するための1つの動きベクトルに対して2つのスケーリング比率を適用することにより、前記第2参照ブロックの1つの動きベクトルから、前記第1参照ピクチャリストを参照するための候補動きベクトルと、前記第2参照ピクチャリストを参照するための候補動きベクトルとを導出する
請求項9又は10に記載の復号装置。 - 動画像の情報を符号化する符号化方法であって、
双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、符号化対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、
前記予測動きベクトルを用いて、前記符号化対象ブロックの情報を符号化する
符号化方法。 - 動画像の情報を復号する復号方法であって、
双予測のための2つの参照ピクチャリストのうちの第1参照ピクチャリストを構成する第1参照ピクチャに含まれる第1参照ブロックの1つ以上の動きベクトルから、復号対象ブロックの予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記2つの参照ピクチャリストのうちの第2参照ピクチャリストを構成する第2参照ピクチャに含まれる第2参照ブロックの1つ以上の動きベクトルから、前記予測動きベクトルに対する1つ以上の候補動きベクトルを導出し、
前記第1参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルと、前記第2参照ブロックの1つ以上の動きベクトルから導出された1つ以上の候補動きベクトルとを含む複数の候補動きベクトルの中から、前記予測動きベクトルを選択し、
前記予測動きベクトルを用いて、前記復号対象ブロックの情報を復号する
復号方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662431995P | 2016-12-09 | 2016-12-09 | |
| US62/431,995 | 2016-12-09 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018105580A1 true WO2018105580A1 (ja) | 2018-06-14 |
Family
ID=62491998
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/043558 WO2018105580A1 (ja) | 2016-12-09 | 2017-12-05 | 符号化装置、復号装置、符号化方法及び復号方法 |
Country Status (2)
| Country | Link |
|---|---|
| TW (1) | TW201834457A (ja) |
| WO (1) | WO2018105580A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110505486A (zh) * | 2019-08-23 | 2019-11-26 | 绍兴文理学院 | 一种对高概率运动矢量映射的编码及解码方法 |
| CN110602502A (zh) * | 2019-08-23 | 2019-12-20 | 绍兴文理学院 | 一种运动矢量编码和解码的方法 |
| JP7375223B2 (ja) | 2020-03-26 | 2023-11-07 | 杭州海康威視数字技術股▲フン▼有限公司 | 復号化方法、符号化方法、装置、及びデバイス |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3901916A4 (en) * | 2018-12-21 | 2022-02-23 | Panasonic Intellectual Property Corporation of America | THREE-DIMENSIONAL DATA CODING METHOD, THREE-DIMENSIONAL DATA DECODING METHOD, THREE-DIMENSIONAL DATA CODING DEVICE AND THREE-DIMENSIONAL DATA DECODING DEVICE |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004208259A (ja) * | 2002-04-19 | 2004-07-22 | Matsushita Electric Ind Co Ltd | 動きベクトル計算方法 |
| WO2012006889A1 (en) * | 2010-07-12 | 2012-01-19 | Mediatek Inc. | Method and apparatus of temporal motion vector prediction |
-
2017
- 2017-12-05 WO PCT/JP2017/043558 patent/WO2018105580A1/ja active Application Filing
- 2017-12-06 TW TW106142777A patent/TW201834457A/zh unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004208259A (ja) * | 2002-04-19 | 2004-07-22 | Matsushita Electric Ind Co Ltd | 動きベクトル計算方法 |
| WO2012006889A1 (en) * | 2010-07-12 | 2012-01-19 | Mediatek Inc. | Method and apparatus of temporal motion vector prediction |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110505486A (zh) * | 2019-08-23 | 2019-11-26 | 绍兴文理学院 | 一种对高概率运动矢量映射的编码及解码方法 |
| CN110602502A (zh) * | 2019-08-23 | 2019-12-20 | 绍兴文理学院 | 一种运动矢量编码和解码的方法 |
| CN110505486B (zh) * | 2019-08-23 | 2022-09-02 | 绍兴文理学院 | 一种对高概率运动矢量映射的编码及解码方法 |
| JP7375223B2 (ja) | 2020-03-26 | 2023-11-07 | 杭州海康威視数字技術股▲フン▼有限公司 | 復号化方法、符号化方法、装置、及びデバイス |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201834457A (zh) | 2018-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6765520B2 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2018199051A1 (ja) | 符号化装置、復号装置、符号化方法および復号方法 | |
| JP6946419B2 (ja) | 復号装置、復号方法及びプログラム | |
| JP7260685B2 (ja) | 符号化装置及び符号化方法 | |
| JP2019017066A (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019151279A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2018105582A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019155971A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2018190207A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| JP2020184808A (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019208372A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2018212111A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019151284A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019189346A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2018199050A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019221103A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| JP2021002891A (ja) | 符号化装置及び符号化方法 | |
| JP6770192B2 (ja) | 符号化装置、符号化方法、復号装置及び復号方法 | |
| WO2018105580A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| JPWO2019098152A1 (ja) | 復号装置、画像復号装置及び復号方法 | |
| JP2020198655A (ja) | 復号装置及び復号方法 | |
| WO2019189344A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| JP6910461B2 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 | |
| WO2019163794A1 (ja) | 符号化装置及び符号化方法 | |
| WO2019151280A1 (ja) | 符号化装置、復号装置、符号化方法及び復号方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17879254 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17879254 Country of ref document: EP Kind code of ref document: A1 |